

Page 1

I/O Terminal
Installation Manual
Revision 1.1, June 2011
AKT-ENC-000-000 Incremental Encoder Inputs
Keep all manuals as a product component during the life span of the product.
Pass all manuals to future users / owners of the product.
Page 2
Record of Document Revisions
Revision Remarks
1.0 Preliminary edition
1.1 Added dimensions to technical data table and mechanical drawing to
Appendix A. For more information, see “Technical Data” page 8 and
“Appendix A” page28 .
IMPORTANT NOTICE
Copyright© Kollmorgen™2010-2011. All rights reserved. Kollmorgen holds the copyright to this manual. All rights are
reserved and no part of this publication may be reproduced or transmitted in any form or by any means without prior
written consent from Kollmorgen.
Disclaimer
The information in this manual was accurate and reliable at the time of its release. However, Kollmorgen. reserves
the right to change the specifications of the product described in this manual without notice at any time.
This document contains proprietary and confidential information of Kollmorgen. The contents of the document may
not be disclosed to third parties, translated, copied or duplicated in any form, in whole or in part, without the express
written permission of Kollmorgen.
Registered Trademarks
Kollmorgen is a registered trademark of Danaher Corp.
Technical changes which improve the performance of the device may be made without prior notice! Printed in the
Federal Republic of Germany. All rights reserved. No part of this work may be reproduced in any form (by printing,
photocopying, microfilm or any other method) or stored, processed, copied or distributed by electronic means without
the written permission of Kollmorgen. All other proprietary names mentioned in this manual are the trademarks of
their respective owners.
June 2011
Page 3

1
Safety Precautions
1.1 Safety Rules............................................................................................5
1.2 State at Delivery......................................................................................5
1.3 Personnel Qualification...........................................................................5
1.4 Description of Notes and Warnings ........................................................5
2 Overview
2.1 AKT-ENC-000-000 Incremental Encoder Inputs.....................................6
2.1.1 Technical Data........................................................................................8
2.1.2 Assignments of Terminal Contact...........................................................9
2.1.3 Operating Modes...................................................................................10
2.1.4 Functions...............................................................................................10
2.1.5 LED Display ..........................................................................................11
2.1.6 Process Data.........................................................................................11
3 Mounting and Wiring
3.1 Installation of Bus Terminals on Mounting Rails...................................12
3.1.1 Assembly...............................................................................................12
3.1.2 Disassembly..........................................................................................12
3.1.3 Connections Within a Bus Terminal Block............................................12
3.1.4 PE Power Contact.................................................................................13
3.1.5 Wiring....................................................................................................13
3.2 AKT-ENC-000-000 Connections...........................................................14
I/O Terminal / CONTENTS
4 Automatic Configuration
4.1 Scan Device..........................................................................................15
4.2 Setting I/O Values.................................................................................15
5 Manual Configuration
5.1 Mapping in the Bus Coupler..................................................................17
5.2 Control and Status Byte........................................................................18
5.2.1 Control Byte in Process Transfer..........................................................18
5.2.2 Status Byte in Process Data Transfer...................................................20
5.3 Register Overview.................................................................................21
5.4 Register Description..............................................................................22
5.4.1 General Register Description................................................................22
5.4.2 Process Variable...................................................................................22
5.4.3 Type Registers......................................................................................23
5.4.4 Manufacturer Parameters.....................................................................24
5.4.5 User Parameters...................................................................................24
5.4.6 Extended Application Region................................................................25
5.5 Terminal-Specific Register Description.................................................25
5.5.1 Application Parameters.........................................................................25
5.6 Register Communication.......................................................................26
3
Page 4

5.6.1
Appendix A
A.1 I/O 12.0mm Mechanical Drawing..........................................................28
Graphic Operator Terminal / CONTENTS
Control Byte in Register Mode..............................................................26
4
Page 5

1 SAFETY PRECAUTIONS
This chapter provides safety information for the I/O terminal.
1.1 Safety Rules
The appropriate staff must ensure that the application or use of the products described satisfy all
the requirements for safety, including all the relevant laws, regulations, guidelines and stan dards.
1.2 State at Delivery
All the components are supplied in particular hardware and software configurations appropriate
for the application. Modifications to hardware or software configurations other than those
described in the documentation are not permitted, and nullify any liability from Kollmorgen.
1.3 Personnel Qualification
This description is only intended for the use of trained specialists in control and automation
engineering who are familiar with the applicable national standards.
I/O Terminal / SAFETY PRECAUTIONS
1.4 Description of Notes and Warnings
The following notes and warnings are used in this manual. They are intended to alert the reader
to the associated safety instructions.
Danger — This note is intended to highlight risks for the life or health of personnel.
Warning — This note is intended to highlight risks for equipment, materials or the environment.
Note — Indicates information that contributes to better understanding.
5
Page 6
2 OVERVIEW
This section provides an overview of the I/O terminal.
Note: For information about configuring the I/O terminal, see the Kollmorgen Automation Suite™
IDE software and online help system.
2.1 AKT-ENC-000-000 Incremental Encoder Inputs
The incremental encoder interface terminal enables the connection of any incremental encoders
to the bus coupler or the PLC. A 16-bit counter with a quadrature decoder and a 16-bit latch can
be read, set or activated. Besides the decoder inputs A, B, C, an additional latch input G1 (24 V)
and a gate input G2 (24 V) for disabling the counter are available.
The 16-bit up / down counter mode can also be selected. In this mode of operation, input B is the
counting input.
1-fold, 2-fold or 4-fold evaluation of the encoder signals A, B, C in simple or complementary form
can be parameterized via the field bus.
The terminal is supplied as a 4-fold quadrature decoder with complementary evaluation of the
encoder signals A, B, C. For operation of the encoder interface, the operating voltage of 24 V DC
must be connected to the terminal contacts in addition to the encoder inputs.
I/O Terminal / OVERVIEW
Additional features include:
The incremental encoder with fault alarm outputs can be connected to the Status input of the
AKT-ENC-000-000.
A period measurement with a resolution of 200 ns can also be performed.
6
Page 7

I/O Terminal / OVERVIEW
Figure 2.1 Top View and Contact Assembly
7
Page 8
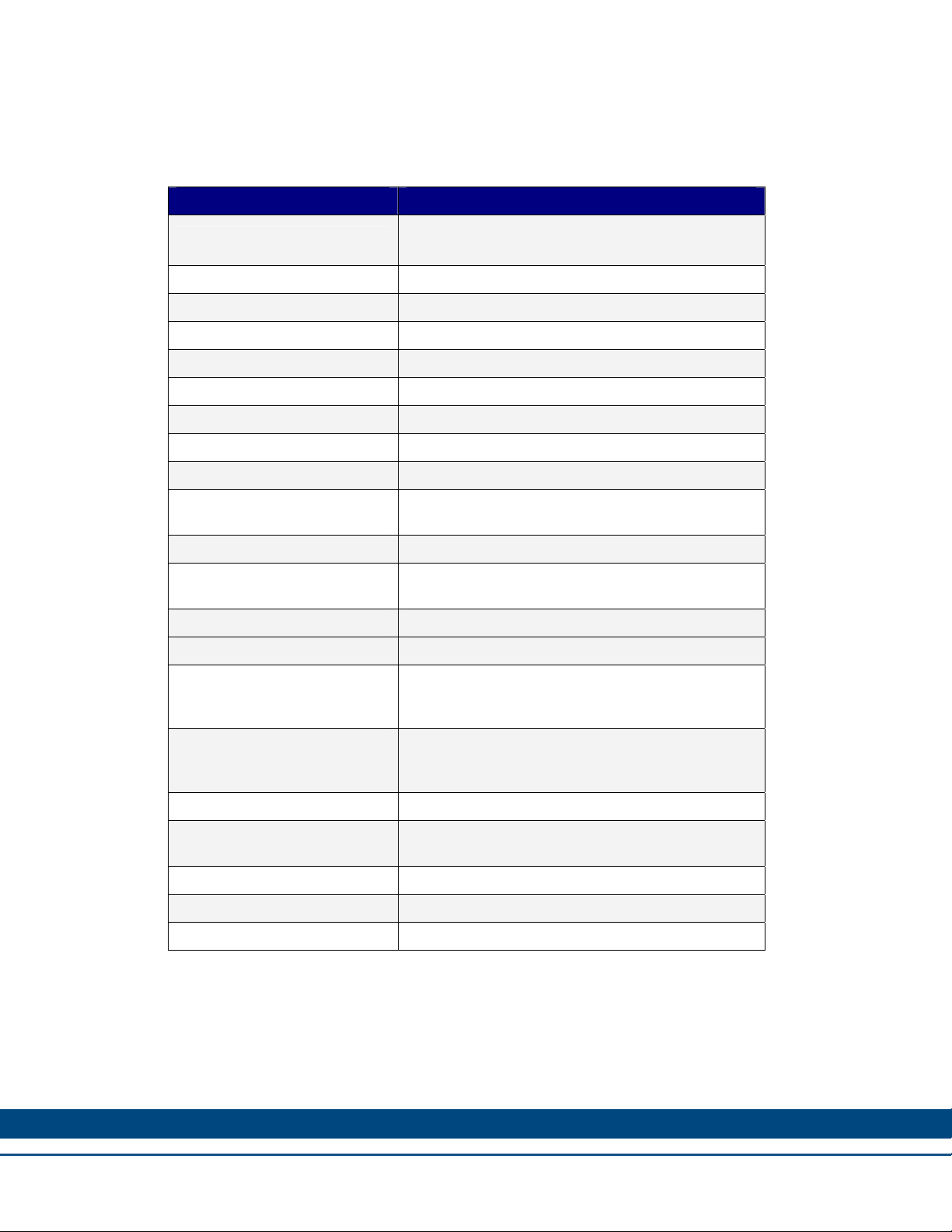
2.1.1 Technical Data
This section provides the technical details for the 2-channel thermocouple module.
Parameters AKT-ENC-000-000
I/O Terminal / OVERVIEW
Sensor connection
Sensor operating voltage 5 V DC
Sensor output current 0.5 A
Counter 16 bits binary
Cut off frequency 1 MHz (at 4 time evaluation)
Quadrature decoder 1-2-4 time evaluation
Zero pulse latch 16 bits
Commands Read, set, activate
Supply voltage 24 V DC (20 V ... 29 V)
Current consumption from
power contacts
Bit width in the process image I/O: 2 x 16 bits data, 1 x 8 bits control/status
Current consumption from
Standard-Bus
Weight ~85 g
Dimensions (W x H) ~12 mm x 100 mm
Permissible ambient
temperature range during
operation
A, A(inv), B, B(inv), zero, zero(inv),
difference signal (RS 485); Status input
0.1 A (without sensor load current)
25 mA
0°C ... +55°C
Permissible ambient
temperature range during
storage
Relative humidity 95%, no condensation
Vibration / Shock resistance
EMC resistance burst / ESD Conforms to EN 61000-6-2 / EN 61000-6-4
Installation position Any
Type of protection IP20
-25°C ... +85°C
Conforms to EN 60068-2-6 / EN 60068-2-27,
EN 60068-2-29
8
Page 9

2.1.2 Assignments of Terminal Contact
I/O Terminal / OVERVIEW
Inputs A, /A
Pulse input in the terminal’s encoder and counter mode.
Inputs B, /B
Phase-shifted pulse input in the terminal’s encoder mode.
Counting direction input in the terminal’s counter mode.
Counting direction:
+ 5 V (or open contact): up
0 V: down
Inputs C, /C
Zero point pulse input for the terminal’s latch register.
This input is activated via the EN_LATC bit in the terminal’s control byte.
External Latch 24 V
Additional latch input of the terminal.
The counter value is latched when this input is alerted and an edge change takes place from 0 V
to 24 V.
External Gate 24 V
9
Page 10

I/O Terminal / OVERVIEW
A high level at this contac
Status Input 5 V
Incremental encoder with fault alarm outputs can be connected to the Status input of the
AKT-ENC-000-000.
Ue
Voltage supply for the encoder (+5 V).
Uo
Voltage supply for the encoder (0 V).
0 V, 24 V
A supply of 0 V and 24 V voltage must be applied to these contacts for operation of the terminal.
2.1.3 Operating Modes
A, B, zero pulse incremental encoder (default)
Up/down counter with:
A = Count , the positive edges of the input pulses are counted
t suppresses counting by the terminal.
B = Up/down input
B = 0: up counting direction
B = 1: down counting direction
C = Gate input
C = 0: counter enabled
C = 1: counter disabled
2.1.4 Functions
Counting
Counter setting
Arming the zero pulse and storing the valid value
Determining the period between two pulses with a resolution of two 200 ns (the time between
two positive edges of the input signal A is evaluated)
Indication of a counter overflow or underflow.
10
Page 11

2.1.5 LED Display
The signal LEDs indicate the status of the encoder inputs A, B, C, Status input and of the logic
inputs of the gate and of the additional external latch.
The RUN LED indicates cyclic data transfer with the higher-level controlle r.
The RUN LED goes off if no process data is exchanged for 100 ms.
2.1.6 Process Data
The AKT-ENC-000-000 always occupies 6 bytes of input data and 6 bytes of output data. The
control / status byte is at the least significant byte offset.
The data word D0/D1 contains the counter value (read/set) and the data word D3/D4 contains the
latch word (read).
In the period measurement mode the value can be found in D2 together with D3 and D4.
I/O Terminal / OVERVIEW
11
Page 12

I/O Terminal / MOUNTING AND WIRING
3 MOUNTING AND WIRING
This section provides mounting and wiring information for the operator terminal.
Note: For information about configuring the I/O terminal, see the Kollmorgen Automation Suite™
IDE software and online help system.
3.1 Installation of Bus Terminals on Mounting Rails
DANGER!! Bring the bus terminal system into a safe, powered down state before starting
installation, disassembly or wiring of the Bus Terminals!
3.1.1 Assembly
The Bus Coupler and Bus Terminals are attached to commercially available 35 mm mounting
rails (DIN rails according to EN 50022) by applying slight pressure:
1. First attach the Fieldbus Coupler to the mounting rail.
2. The Bus Terminals are now attached on the right-hand side of the Fieldbus Coupler. Join the
components with tongue and groove and push the terminals against the mounting rail, until
the lock clicks onto the mounting rail.
If the Terminals are clipped onto the mounting rail first and then pushed together without
tongue and groove, the connection will not be operational! When correctly assembled, no
significant gap should be visible between the housings.
During the installation of the Bus Terminals, the locking mechanism of the terminals must not
come into conflict with the fixing bolts of the mounting rail.
3.1.2 Disassembly
Each terminal is secured by a lock on the mounting rail, which must be relea se d for disassembly:
1. Carefully pull the orange-colored lug approximately 1 cm out of the disassembled terminal,
until it protrudes loosely. The lock with the mounting rail is now released for this terminal, and
the terminal can be pulled from the mounting rail without excessive force.
2. Grasp the released terminal with thumb and index finger simultaneous at the upper and lower
grooved housing surfaces and pull the terminal away from the mounting rail.
3.1.3 Connections Within a Bus Terminal Block
The electric connections between the Bus Coupler and the Bus Terminals are automatically
realized by joining the components:
The six spring contacts of the Standard Bus/Performance Bus deal with the transfer of the
data and the supply of the Bus Terminal electronics.
The power contacts deal with the supply for the field electronics and thus represent a supply
rail within the bus terminal block. The power contacts are supplied via terminals on the Bus
Coupler.
12
Page 13

Note
: During the design of a bus terminal block, the pin assignment of the individual Bus
Terminals must be taken account of, since some types (e.g. analog Bus Terminals or digital
4-channel Bus Terminals) do not or not fully loop through the power contacts. Power Feed
Terminals interrupt the power contacts and thus represent the start of a new supply rail.
3.1.4 PE Power Contact
The power contact labeled PE can be used as a protective earth. For safety reasons this contact
mates first when plugging together, and can ground short-circuit currents of up to 125 A.
WARNING!! Note that, for reasons of electromagnetic compatibility, the PE contacts are
For insulation testing, disconnect the PE supply line at the Bus Coupler or the
Note: The PE power contact must not be used for other potentials!
I/O Terminal / MOUNTING AND WIRING
capacitatively coupled to the mounting rail. This may lead to incorrect results
during insulation testing or to damage on the terminal (e.g. disruptive discharge
to the PE line during insulation testing of a consumer with a nominal voltage of
230 V).
Power Feed Terminal! In order to decouple further feed points for testing, these
Power Feed Terminals can be released and pulled at least 10 mm from the
group of terminals.
3.1.5 Wiring
Up to eight connections enable the connection of solid or finely stranded cables to the Bus
Terminals. The terminals are implemented in spring force technology. Connect the cables as
follows:
1. Open a spring-loaded terminal by slightly pushing with a screwdriver or a rod into the square
2. The wire can now be inserted into the round terminal opening without any force.
3. The terminal closes automatically when the pressure is released, holding the wire securely
Note: Analog sensors and actors should always be connected with shielded, twisted
paired wires.
opening above the terminal.
and permanently.
13
Page 14

3.2 AKT-ENC-000-000 Connections
The section describes the connections for the Counter module.
I/O Terminal / MOUNTING AND WIRING
Figure 3.1 Terminal Connections
14
Page 15

I/O Terminal / AUTOMATIC CONFIGURATION
4 AUTOMATIC CONFIGURATION
This chapter describes the basics of automatic configuration within the KAS Integrated
Development Environment (IDE).
4.1 Scan Device
For ease-of-use the KAS IDE Scan Device feature provides automatic integration of I/O devices.
This allows you to automatically locate and add I/O terminals to the application project:
4.2 Setting I/O Values
After the I/O slice is mapped it can be selected in the application project and the offset and gain
values can be set. Additionally, the IDE allows you to map the I/O points to variables in your
application:
15
Page 16

I/O Terminal / AUTOMATIC CONFIGURATION
For more detailed information on these procedures refer to the section “EtherCAT Scan Device”
in the KAS IDE online help.
16
Page 17

5 MANUAL CONFIGURATION
Kollmorgen strongly recommends automatic configuration using the KAS IDE over manual
configuration. For automatic configuration refer to chapter 4. Manual configuration is for advanced
procedures only. The following sections provide the necessary configuration information to
manually map the I/O device.
5.1 Mapping in the Bus Coupler
Each terminal channel is mapped in the bus coupler. In the standard case, this mapping is done
with the default setting in the bus coupler / bus terminal. The following tables provide information
on how the AKT-ENC-000-000 maps itself in the bus coupler depending on the set parameters.
The AKT-ENC-000-000 is mapped in the bus coupler depending on the set parameters. The
terminal is always evaluated completely, the terminal occupies memory space in the process
image of the input and outputs.
Default mapping for CANopen
Conditions Word offset High byte Low byte
I/O Terminal / MANUAL CONFIGURATION
Complete evaluation: any
Motorola format: no
Word alignment: no
Default mapping for Profibus Coupler
Conditions Word offset High byte Low byte
Complete evaluation: any
Motorola format: yes
Word alignment: no
Default mapping for EtherCAT
Conditions Word offset High byte Low byte
Complete evaluation: any
Motorola format: no
Word alignment: yes
0 D0 CB/SB
1 D2 D1
2 D4 D3
0 D1 CB/SB
1 D2 D0
2 D3 D4
0 – CB/SB
1 D1 D0
2 – D2
3 D4 D3
17
Page 18

I/O Terminal / MANUAL CONFIGURATION
Conditions Word offset High byte Low byte
Complete evaluation: any
Motorola format: yes
Word alignment: yes
Key Complete evaluation: The terminal is mapped with control / status byte.
Motorola format: The Motorola or Intel formal can be set.
Word alignment: The terminal is at a word limit in the bus coupler.
CB: Control- Byte (appears in the process image of the outputs).
SB: Status- Byte (appears in the process image of the inputs).
D0/D1: Counter word (read/set)
(D2): contains the period, together with 3/D4
D3/D4: Latch word (read)
5.2 Control and Status Byte
The following section describes the control and status bytes.
5.2.1 Control Byte in Process Transfer
0 – CB/SB
1 D0 D1
2 – D2
3 D3 D4
Bit
name
The control byte is transferred from the controller to the terminal. It can be used in the register
mode (REG = 1) or in process data transfer (REG = 0). Various actions are triggered in the AKTENC-000-000 with the control byte:
7 6 5 4 3 2 1 0
REG = 0 - - - En_Latch_Ext_n Cnt_Set EN_LAT_EXT/
RD_PERIOD
Bit Bit Function
3 En_Latch_Ext_n The external latch input is activated for
negative edge. With the first external
latch impulse after validity of the
EN_Latch_Ext_n bit, the counter value
in the latch register is stored. The
pulses that follow have no influence on
the latch register when the bit is set.
Attention must be paid to ensuring that
the corresponding latch valid bit
(Latch_Ext_Val) has been removed
from the terminal before alerting of the
zero pulse. This functionality is
EN_LATC
18
Page 19

I/O Terminal / MANUAL CONFIGURATION
Bit Bit Function
adjustable in the feature register
(default).
2 Cnt_Set The counter is set to the value that is
specified via the process data with the
rising edge of Cnt_Set.
1
En_Latch_Ext The external latch input is activated for
positive edge. With the first external
latch impulse after validity of the
En_Latch_Ext bit, the counter value in
the latch register is stored. The pulses
that follow have no influence on the
latch register when the bit is set.
Attention must be paid to ensuring that
the corresponding latch valid bit
(Latch_Ext_Val) has been removed
from the terminal before alerting of the
zero pulse. This functionality is
adjustable in the feature register
(default).
RD_Period The periods between two positive
edges of the input A are measured with
a resolution of 200 ns. When the bit is
set, this period is output in the data
bytes D2, D3, D4. This functionality is
adjustable in the feature register.
0 En_Latch The zero point latch (C input) is
activated. The counter value is stored in
the latch register with the first external
latch pulse after validity of the En_Latch
bit (this has priority over En_Latch_Ext).
The pulses that follow have no
influence on the latch register when the
bit is set. Attention must be paid to
ensuring that the corresponding latch
valid bit (Latch_Val) has been removed
from the terminal before the zero pulse
is alerted (the Latch_Val bit cannot be
removed from the terminal until the C
pulse has a low level).
Note: For the external latch input: The activation of the positive edge (En_Latch_Ext = 1) has
priority to the activation of the negative edge (En_Latch_Ext_n = 1).
19
Page 20

5.2.2 Status Byte in Process Data Transfer
The status byte is transferred from the terminal to the controller. The status byte contains various
status bits of the AKT-ENC-000-000.
I/O Terminal / MANUAL CONFIGURATION
Bit
name
7 6 5 4 3 2 1 0
REG = 0 - State_Input Overflow Underflow Cnt_Set_
Acc
Bit Name
5 State_Input The state of the Status input is mapped
in this Bit (adjustable via feature
register)
4 Overflow This bit is set if an overflow (65535 to 0)
of the 16-bit counter occurs. It is reset
when the counter exceeds a third of the
measurement range (21845 to 21846)
or as soon as an underflow occurs.
3 Underflow This bit is set if an underflow (0 to
65535) of the 16-bit counter occurs. It is
reset when the counter drops below two
thirds of the measurement range
(43690 to 43689) or as soon as an
overflow occurs.
Latch_Ext
_Val/RD_
Period_Q
Latch_Val
2 CntSet_Acc The data for setting the counter has
been accepted by the terminal.
1
0 Latch_Val A zero point latch has occurred. The
RD_Period_Q The data bytes 2, 3, 4 contain the
period time
Latch_Ext_Val An external latch pulse has occurred.
The data D2,D3 in the process image
corresponds to the latched value when
the bit is set. To activate the latch input
again, En_Latch_Ext must first be
removed and then set again.
data D2, D3 in the process image
corresponds to the latched value when
the bit is set. To activate the latch input
again, En_Latch must first be removed
and then set again.
20
Page 21

5.3 Register Overview
The terminal can be configured and parameterized by using the internal regi ster structure.
Address Description Default Value R/W Storage Medium
R0 Reserved 0x0000 R
… … … … …
R5 Reserved 0x0000 R
I/O Terminal / MANUAL CONFIGURATION
R6
R7
R8 Terminal type 5101 R ROM
R9
R10
R11 Signal channels 0x0130 R ROM
R12 Minimum data length 0x3030 R ROM
R13 Data structure 0x0000 R ROM
R14 Reserved 0x0000 R
R15 Alignment register Variable R/W RAM
R16
R17 Reserved
… … … … …
Diagnostic
register – not used
Command
register - not used
Software version
number
Multiplex shift
register
Hardware version
number
0x0000 R
0x0000 R
0x???? R ROM
0x0218/0130 R ROM
0x???? R/W SEEROM
R31 Code word register Variable R/W RAM
R32 Feature register 0x2200 R/W SEEROM
R33 Reserved 0x0000 R/W SEEROM
… … … … …
R61 Reserved 0x0000 R/W SEEROM
21
Page 22

5.4 Register Description
The complex terminals can be adjusted to different operating modes or functionalities. The "
general description of register " describes the contents of the registers, which are identical for all
complex terminals.
The terminal-specific registers are explained in the following section following.
The access to the internal registers of the terminal is described in the section "Register
Communication ".
5.4.1 General Register Description
Complex terminals that possess a processor are capable of bidirectionally ex-changing data with
the higher-level control system. Below, these terminals are referred to as intelligent bus terminals.
They include the analog inputs (0-10V, -10-10V, 0-20mA, 4-20mA), the analog outputs (0-10V, 10-10V, 0-20mA, 4-20mA), serial interface terminals (RS485, RS232, TTY, data transfer
terminals), counter terminals, encoder interfaces, SSI interfaces, PWM terminals and all other
configurable terminals.
Internally, all intelligent terminals possess a data structure that is identical in terms of it's essential
characteristics. This data area is organized in words and embra ce s 64 memory locations. The
essential data and parameters of the terminal can be read and adjusted by way of the structure.
Function calls with corresponding parameters are also possible. Each logical channel of an
intelligent terminal has such a structure (therefore, 4-channel analog terminals have 4 regi ster
sets.
I/O Terminal / MANUAL CONFIGURATION
This structure is broken down into the following areas:
Register Application
0 to 7 Process variables
8 to 15 Type register
16 to 30 Manufacturer parameters
31 to 47 User parameters
48 to 63 Extended user area
5.4.2 Process Variable
R0 - R7: Registers in the terminal’s internal RAM – The process variables can be used in
additional to the actual process image and their functions are specific to the terminal.
R0 - R5: These registers have a function that depends on the terminal type.
22
Page 23

I/O Terminal / MANUAL CONFIGURATION
R6: Diagno
In the case of serial interface terminals, for example, parity errors that have occurred during data
transfer are indicated.
R7: Command register
High-Byte_Write = function parameter
Low-Byte_Write = function number
High-Byte_Read = function result
Low-Byte_Read = function number
5.4.3 Type Registers
R8 - R15 Registers in the terminal's internal ROM
The type and system parameters are programmed permanently by the manufacturer and can only
be read by the user but cannot be modified.
R8: Terminal type:
The terminal type in register R8 is needed to identify the terminal.
R9: Software version X.y
stic register – The diagnostic register may contain additional diagnostic information.
The software version can be read as an ASCII character string.
R10: Data length
R10 contains the number of multiplexed shift registers and their length in bits. The bus coupler
recognizes this structure.
R11: Signal channels
In comparison with R10, the number of logically existing channels is located here. For example,
one physically existing shift register may consist of several signal channels.
R12: Minimum data length
The respective byte contains the minimum data length of a channel to be transferred. If the MSB
is set, then the control/status byte is not necessarily needed for the function of the terminal and,
with appropriate configuration of the coupler, is not transferred to the control system. 3.2.1.1
R13: Data type register
Data Type Register Description
0x00 Terminal with no valid data type
0x01 Byte array
0x02 Structure 1 byte n bytes
0x03 Word array
23
Page 24

I/O Terminal / MANUAL CONFIGURATION
Data Type Register Description
0x04 Structure 1 byte n words
0x05 Double word array
0x06 Structure 1 byte n double words
0x07 Structure 1 byte 1 double word
0x08 Structure 1 byte 1 double word
0x11 Byte array with variable logical channel length
0x12 Structure 1 byte n bytes with variable logical channel length (e.g.
60xx)
0x13 Word array with variable logical channel length
0x14 Structure 1 byte n words with variable logical channel length
0x15 Double word array with variable logical channel length
0x16 Structure 1 byte n double words with variable logical channel length
R14: Reserved
R15: Alignment bits (RAM) – The alignment bits are used to place the analog terminal in the
Bus Coupler on a byte boundary.
5.4.4 Manufacturer Parameters
R16 to R30: Manufacturer parameter area (SEEROM) – The manufacturer parameters are
specific for each type of terminal. They are programmed by the manufacturer, but can also be
modified by the controller. The manufacturer parameters are stored in a serial EEPROM in the
terminal, and are retained in the event of voltage drop-out. These registers can only be altered
after a code-word has been set in R31.
5.4.5 User Parameters
R31 to R47: User parameter area (SEEROM) – The application parameters are specific for each
type of terminal. They can be modified by the programmer. The application parameters are stored
in a serial EEPROM in the terminal, and are retained in the event of voltage drop-out. The user
area is write-protected by a code-word.
R31: Code-word register in RAM – The code-word 0x1235 must be entered here so that
parameters in the user area can be modified. If any other value is entered into this register, the
write-protection is active. When write protection is not active, the code word is returned when the
register is read. If the write protection is active, the register contains a zero value.
R32: Feature register – This register specifies the terminal's operating modes. Thus, for
instance, a user-specific scaling can be activated for the analog I/Os.
R33 to R47 Terminal-specific Registers – The function of these registers depends on the
respective terminal type (see terminal-specific register description).
24
Page 25

5.4.6 Extended Application Region
R47 to R63 – These registers have not yet been implemented.
5.5 Terminal-Specific Register Description
This section contains the description for terminal specific registers.
5.5.1 Application Parameters
R32: Feature register:
[0x2200]
The feature register determines the operating modes of the terminal.
Feature bit no. Mode Description
Bit 0 0 Reserved, don’t change
Bit 1 0/1 0: Counter inhibit with high-level at Gate
I/O Terminal / MANUAL CONFIGURATION
input [0]
1: Counter inhibit with low-level at Gate-
input
Bit 3, Bit 2
Bit 6 – Bit 4
Bit 7 – 9 0 Reserved, don’t change
Bit 11, Bit 10
0 0 Status input (active-low) is mapped into
the status-byte.5 (ST.5) [00]
0 1 Reserved
1 0 ST.5 = Status input, ST.6 = Status input
1 1 ST.5 = Status input, ST.6 = Status input
0 0 0 External Latch function active [000]
0 0 1 Period measurement active
0 1 0
…
1 1 1
0 0 4-fold evaluation of the encoder signals
0 1 1-fold evaluation of the encoder signals
Reserved
A,B,C,
i.e. both rising and falling edges of the
encoder signals A, B are counted. [00]
A, B, C.
i.e. every period of the encoder signal A
is counted.
1 0 2-fold evaluation of the encoder signals
A, B, C,
i.e. every edge of the encoder signal A
is counted.
25
Page 26

Feature bit no. Mode Description
1 1 4-fold evaluation of the encoder signals
Bit 14 – 12 0 Reserved, don’t change
Bit 15 0/1 0: Encoder interface. [0]
5.6 Register Communication
Register Access Via Process Data Exchange | Bit 7=1bin: Register Mode
If bit 7 of the control byte is set, then the first two bytes of the user data are not used for
exchanging process data, but are written into or read from the terminal's register set.
I/O Terminal / MANUAL CONFIGURATION
A, B, C
1: Counter mode is activated.
16-bit up/down counter
Input A: Counter
Input B: Counting direction (5 V or open
= up, 0 V= down)
Input C: Latch
Bit 6=0
: read | Bit 6=1
bin
bin
Bit 6 of the control byte specifies whether a register should be read or written. If bit 6 is not set,
then a register is read out without modifying it. The value can then be taken from the input
process image.
If bit 6 is set, then the user data is written into a register. As soon as the status byte has supplied
an acknowledgement in the input process image, the procedure is completed (see example).
Bit 0 to 5: Address
The address of the register that is to be addressed is entered into bits 0 to 5 of the control byte.
5.6.1 Control Byte in Register Mode
Bit
name
REG = 0bin: Process data exchange
REG = 1bin: Access to register stru ct ure
W/R = 0bin: Read register
7 6 5 4 3 2 1 0
REG = 0 W/R A5 A4 A3 A2 A1 A0
: write
W/R = 1bin: Write register
A5...A0 = register address
Address bits A5 to A0 can be used to address a total of 64 registers.
26
Page 27

I/O Terminal / MANUAL CONFIGURATION
The control or status byte occupies the lowest address of a logical channel. The corresponding
register values are located in the following 2 data bytes.
27
Page 28

APPENDIX A
This section provides the mechanical drawing of the I/O Terminal.
A.1 I/O 12.0mm Mechanical Drawing
I/O Terminal / APPENDIX A
28
Page 29

About Kollmorgen
Kollmorgen is a leading provider of motion systems and
components for machine builders. Through world-class
knowledge in motion, industry-leading quality and
deep expertise in linking and integrating standard and
custom products, Kollmorgen delivers breakthrough
solutions that are unmatched in performance, reliability
and ease-of-use, giving machine builders an irrefutable
marketplace advantage.
For assistance with your application needs, contact
us at: 540-633-3545, contactus@kollmorgen.com
or visit www.kollmorgen.com
North America
Kollmorgen
203A West Rock Road
Radford, VA 24141 USA
Phone: 1-540-633-3545
Fax: 1-540-639-4162
Europe
Kollmorgen
Wacholderstraße 40 – 42
40489 Düsseldorf Germany
Phone: + 49 (0) 203-9979-235
Fax: + 49 (0) 203-9979-3314
 Loading...
Loading...