

Kollmorgen AKD2G-S, AKD2G, AKD2G-S-7V03, AKD2G-S-7V12, AKD2G-S-6V03 Installation Manual
...Page 1
AKD®2G-Sxx with Functional Safety Option 1
STO - SIL2
Installation Manual
Manual Edition: -, Beta, December 2018
Safety Edition: S101, December2018
Valid for AKD®2G-S HardwareRevision A
Part Number907-200003-00
Original Document
Forsafe and proper use, follow
these instructions.
Keepthem for future reference.
Beta Drives: Approvals (CE, Functional Safety, UL) arepending.
Page 2
Record of Document Revisions
Revision Remarks
...
Table with lifecycle informationof this document (➜ # 145)
Beta, 12/2018 Beta edition
Hardware Revision (HR)
AKD2G Firmware Workbench KAS IDE Remarks
A from 02-00-00-000 from 2.00.0.0000 from 3.01 Beta revision
Trademarks
AKD is a registered trademark of Kollmorgen Corporation
EnDat is a registeredtrademark of Dr. Johannes Heidenhain GmbH
EtherCAT is a registered trademark and patented technology, licensedby Beckhoff Automation GmbH
Ethernet/IP is a registered trademark of ODVA, Inc.
Ethernet/IP Communication Stack: copyright (c) 2009, Rockwell Automation
HIPERFACE is a registeredtrademark of Max StegmannGmbH
Windows is a registeredtrademark of Microsoft Corporation
Technical changes which improve the performance of the device may be made without prior notice!
This document is the intellectual property of Kollmorgen. All rights reserved. No part of this work may be reproduced
in any form (by photocopying, microfilm or any other method) or stored, processed, copied or distributed by electronic
means without the written permission of Kollmorgen.
2 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 3
AKD2G-S Installation, Safety 1 | Tableof Contents
1 Table of Contents
1 Table of Contents 3
2 General 9
2.1 About thisInstallationManual 10
2.2 Using the PDF Format 10
2.3 SymbolsUsed 11
2.4 AbbreviationsUsed 12
2.5 Referred Standards 13
3 Product Safety 14
3.1 You shouldpay attention to this 15
3.2 Shock-hazard Protection 17
3.2.1 Leakage current 17
3.2.2 Residualcurrent protective device (RCD) 17
3.2.3 Isolatingtransformers 17
3.3 Stop / Emergency Stop / EmergencyOff 18
3.3.1 Stop 18
3.3.2 Emergency Stop 19
3.3.3 Emergency Off 19
3.4 Warning note labels 20
3.4.1 Notes placedon the product 20
3.4.2 Adhesive labelin the package 20
3.5 Use asDirected 21
3.6 Prohibited Use 22
4 Product life cycle handling 23
4.1 Transport 24
4.2 Packaging 24
4.3 Storage 24
4.4 Installation, setup and normal operation 25
4.5 Decommissioning 25
4.6 Maintenance and cleaning 25
4.7 Disassembly 25
4.8 SystemRepair 26
4.9 Disposal 26
5 Package 27
5.1 PackageSupplied 28
5.2 Nameplate 28
5.3 Part Number Scheme 29
6 Technical description and data 30
6.1 The AKD2G Familyof Digital Drives 31
6.2 Ambient Conditions,Ventilation, and Mounting Position 33
6.3 MechanicalData 33
6.4 Performance Data 34
6.5 Electrical data 35
6.5.1 Singleaxisvariants (S) 35
6.5.1.1 Mains supply data, 1 phaseAC, type AKD2G-Sxx- (S) 35
6.5.1.2 Mains supply data, 3 phaseAC, type AKD2G-Sxx- (S) 35
6.5.1.3 Auxiliary voltage input data, 24V DC, type AKD2G-Sxx- (S) 35
6.5.1.4 Output data, type AKD2G-Sxx- (S) 36
6.5.2 Dual axisvariants(D: I1=I2) 37
6.5.2.1 Mains supply data, 1 phaseAC, type AKD2G-Sxx- (D) 37
6.5.2.2 Mains supply data, 3 phaseAC, type AKD2G-Sxx- (D) 37
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 3
Page 4
AKD2G-S Installation, Safety 1 | Tableof Contents
6.5.2.3 Auxiliary voltage input data, 24V DC, type AKD2G-Sxx- (D) 37
6.5.2.4 Output data, type AKD2G-Sxx- (D) 38
6.6 LCD Displayand Push-buttons (B1, B2) 39
6.7 SD Card Slot 41
6.8 Electrical Motor Braking 42
6.8.1 DynamicBraking 42
6.8.2 Rheostatic energy dissipation 42
6.8.2.1 Functional description 42
6.8.2.2 Technicaldata for AKD2G-Sxx-6V 43
6.8.2.3 Technicaldata for AKD2G-Sxx-7V 44
7 Mechanical Installation 45
7.1 Important Notes 46
7.2 Guideto MechanicalInstallation 46
7.3 Dimensions 47
8 Electrical Installation 48
8.1 Important Notes 49
8.2 Guideto electricalinstallation 50
8.3 Wiring 51
8.3.1 General 51
8.3.2 Mating connectors 51
8.3.3 Cable and Wire Requirements 52
8.3.3.1 Cable material 52
8.3.3.2 Cable crosssectionsand requirements 53
8.3.4 ProtectiveEarth connection 54
8.4 EMI NoiseReduction 55
8.4.1 Recommendations for EMI noisereduction 55
8.4.2 Shielding with external shieldingbusbar 56
8.4.2.1 ShieldingConcept 56
8.4.2.2 ShieldingBusbar 57
8.4.3 Shielding connectionto the drive 58
8.4.3.1 ShieldingConcept 58
8.4.3.2 Grounding plates and shield connection clamps 59
8.4.3.3 Motor connector X1/X2 with shielding connection 59
8.5 Connection Overview 60
8.5.1 Connector PositionAKD2G-Sxx-6V 60
8.5.2 Connector PositionAKD2G-Sxx-7V 61
8.5.3 Wiring overview, single axisdrive 62
8.5.4 Wiring overview, dualaxisdrive 63
8.5.5 Connector pin assignments 64
8.5.5.1 X1 and X2: Motor, Brake, Feedback1 64
8.5.5.2 X3: Mains,regen resistor, DC-Bus 64
8.5.5.3 X10: 24 VDC 65
8.5.5.4 X11, X12: Motion Bus 65
8.5.5.5 X13, X14: CAN bus (optional) 65
8.5.5.6 X20: Service 65
8.5.5.7 X21: I/O, Feedback 4 66
8.5.5.8 X22: I/O extended, EEO2,Feedback5 67
8.5.5.9 X23: Feedback 3, EEO1,I/O 68
8.5.5.10 X41: SFA Feedback converter, EEO3/EEO4(accessory) 69
8.6 Power and Logic Voltage Supply (X3/X10) 70
8.6.1 Mainspower supply(X3) 70
8.6.1.1 Fusing 71
8.6.1.2 Wiring examplesmainspower supply 73
8.6.2 Auxiliary voltage power supply 24 VDC (X10) 75
4 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 5
AKD2G-S Installation, Safety 1 | Tableof Contents
8.6.2.1 Fusing 75
8.6.2.2 Wiring example24 VDC supply 75
8.7 DC Bus link (X3) 75
8.8 External Regen resistor (X3) 76
8.8.1 Fusing and Wiring 76
8.9 Motor Power, Brake and Feedback connection 77
8.9.1 Motor connectivity, some examples 77
8.9.2 Motor singlecable connection 78
8.9.2.1 Motor Power, Brake and Feedback connectors X1, X2 78
8.9.2.2 Feedbackconnectors X21, X22, X23 79
8.9.3 Motor dual cableconnection 80
8.9.3.1 Motor power and motor brake connectorsX1, X2 81
8.9.3.2 Feedbackconnectors X1, X2, X41, X21, X22, X23 81
8.9.4 Motor Holding Brake Connection 82
8.9.5 Feedback Connection 84
8.9.5.1 FeedbackConnector X1, X2 85
8.9.5.2 FeedbackConnector X21 86
8.9.5.3 FeedbackConnector X22 87
8.9.5.4 FeedbackConnector X23 88
8.9.5.5 FeedbackConnector X41 (SFA, accessory) 89
8.10 ElectronicGearing, EEO,Master-Slave 90
8.10.1 ElectronicGearing 90
8.10.2 Emulated Encoder Output (EEO) 91
8.10.3 Master-Slavecontrol 93
8.10.3.1 Master-Slaveusing X22 93
8.10.3.2 Master-Slaveusing optionalX23 or X41 93
8.11 Motion BusInterface (X11/X12) 94
8.12 CAN-BusInterface (X13/X14) 95
8.12.1 CAN-Bus Topology 95
8.12.2 CAN-Bus Wiring 96
8.12.3 Baud rate for CAN-Bus 97
8.12.4 Node Address for CAN-Bus 97
8.12.5 CAN-Bus Termination 97
8.13 ServiceInterface (X20) 98
8.13.1 Possible NetworkConfigurations 98
8.14 I/O Connection (X21/X22/X23) 99
8.14.1 Pinout 99
8.14.2 Technicaldata 100
8.14.3 Analog Input 101
8.14.4 Analog Output 102
8.14.5 DigitalInputs 103
8.14.5.1 Digital-In 1 and 2 103
8.14.5.2 Digital-In 3 to 12 104
8.14.5.3 Digital-In/Out 1 and 2 105
8.14.5.4 Digital-In/Out 3 to 6 106
8.14.6 DigitalOutputs 107
8.14.6.1 Digital-Out 1 to 6 107
8.14.6.2 Digital-Out 7 and 8 108
8.14.6.3 Digital-In/Out 1 and 2 109
8.14.6.4 Digital-In/Out 3 to 6 109
8.14.6.5 Digital-Out 9, Relaycontacts 110
9 Setup 111
9.1 Important Notes 112
9.2 Guideto drive setup 113
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 5
Page 6
AKD2G-S Installation, Safety 1 | Tableof Contents
9.2.1 InitialDrive Test Procedure 113
9.2.1.1 Unpacking, mounting, and wiring the AKD2G 113
9.2.1.2 Minimum wiring for drive testwithout load, example 113
9.2.1.3 Confirm connections (example: directlyto PC) 114
9.2.1.4 System integration 114
9.2.1.5 Installand start WorkBench 115
9.2.1.6 Setup the axisin WorkBench 115
9.2.1.7 Enable the axis(Hardware) 115
9.2.1.8 Move the motor axis 115
9.2.1.9 Tune the axis 115
9.2.2 Setup software WorkBench 116
9.2.2.1 Use as directed 116
9.2.2.2 Software description 117
9.2.2.3 Hardware requirements 117
9.2.2.4 Operating systems 117
9.2.2.5 Installation under Windows 7/8/10 118
9.3 Switch-On and Switch-OffBehavior 119
9.3.1 Switch-on behavior instandard operation 120
9.3.2 Switch-off behavior 120
9.4 Fault and Warning Messages 121
9.4.1 Fault and warning messages AKD2G 121
9.5 Troubleshootingthe AKD2G 122
10 Functional Safety 123
10.1 General notes 124
10.2 Use asdirected 124
10.3 Prohibited use 125
10.4 Abbreviationsused for functionalsafety 125
10.5 Enclosure, wiring 126
10.6 Functional SafetyOption 1 (I/O, SIL2 PLd) 127
10.6.1 TechnicalData 127
10.6.2 Safety Properties Overview 128
10.6.3 STO (Safe Torque Off) 129
10.6.3.1 Description 129
10.6.3.1.1 Important Notes 129
10.6.3.1.2 Precondition before activation 129
10.6.3.1.3 Activation 129
10.6.3.1.4 Restart 130
10.6.3.1.5 Timing 131
10.6.3.2 Safety Diagnosticviewin WorkBench 131
10.6.3.3 Fault Reaction / Failure Messages 132
10.6.4 Verification,Commissioning 132
10.6.4.1 Verification 132
10.6.4.2 Proof test 132
10.7 Safety Faults,Safety Warnings 133
10.7.1 Drive LCD Display 133
10.7.2 Drive Safety Faults 134
10.7.3 Drive Safety Warnings 134
10.7.4 Troubleshootingsafety functionality 134
10.8 Functional SafetyKeyword Reference Guide 135
10.8.1 AXISx.SAFE.STO Parameters 136
10.8.1.1 AXIS#.SAFE.STO.ACTIVE 136
10.8.1.1.1 Description 136
10.8.1.1.2 Context 136
6 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 7
AKD2G-S Installation, Safety 1 | Tableof Contents
10.8.1.1.3 Versions 136
10.8.1.1.4 General Information 136
10.8.1.1.5 Variants Supported 136
10.8.1.2 AXIS#.SAFE.STO.A 137
10.8.1.2.1 Description 137
10.8.1.2.2 Context 137
10.8.1.2.3 Versions 137
10.8.1.2.4 General Information 137
10.8.1.2.5 Variants Supported 137
10.8.1.3 AXIS#.SAFE.STO.B 138
10.8.1.3.1 Description 138
10.8.1.3.2 Context 138
10.8.1.3.3 Versions 138
10.8.1.3.4 General Information 138
10.8.1.3.5 Variants Supported 138
10.8.1.4 AXIS#.SAFE.STO.REPORTFAULT 139
10.8.1.4.1 Description 139
10.8.1.4.2 Context 139
10.8.1.4.3 Versions 139
10.8.1.4.4 General Information 139
10.8.1.4.5 Variants Supported 139
11 Approvals 140
11.1 Conformance with UL/cUL 141
11.2 Conformance with CE 141
11.3 Conformance with RoHS 141
11.4 Conformance with REACH 141
11.5 Functional Safetyapproval 141
11.6 Conformance with EAC 141
12 Index 143
13 Record of document revisions 145
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 7
Page 8

AKD2G-S Installation, Safety 1 |
---/ ---
8 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 9
AKD2G-S Installation, Safety 1 | 2 General
2 General
2.1 About this Installation Manual 10
2.2 Using the PDF Format 10
2.3 Symbols Used 11
2.4 Abbreviations Used 12
2.5 Referred Standards 13
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 9
Page 10
AKD2G-S Installation, Safety 1 | 2 General
2.1 About this Installation Manual
This document, the AKD®2G Installation Manual ("Instructions Manual" accordingto EC
Machinery Directive 2006/42/EC), describes the AKD®2G series of digital drives and
includes informationneeded to safely install an AKD2G.
This document is valid for AKD2G single axis drive or dual axis drive with 110V to 240V or
240V to 480V mains voltage.
Ouput stages: 3 A or 6 A or 12 A rated current
Programmability options: Base drive or Position Indexer drive
Connectivity options: analog, CANopen, EtherCAT, Ethernet/IP
I/O options: ExtendedI/O (X22), Feedback&EEO (X23)
Functional Safety options: option 1 with STO (SIL2 PLd)
A digital versionof this manual (pdf format)is available on the DVD includedwith yourdrive.
Additional documents:
WorkBench Online Help: describes how to use your drive in common applications. It also
provides tips for maximizing your system performance with the AKD2G. The Online Help
includes the Parameter and Command Reference Guide which provides information for
the parameters and commands used to program the AKD2G.
CAN-BUS Communication: describes how to use your drive in CANopen applications.
EtherCAT Communication: describes how to use your drive in EtherCAT applications.
Ethernet/IP Communication: describes how to use your drive in Ethernet/IP applications.
Accessories Manual: provides information for accessories like cables and regen resistors
used with AKD2G. Regional variants of this manual exist.
All documents can be downloadedfrom the Kollmorgen website www.kollmorgen.com.
2.2 Using the PDF Format
This document includes several features for ease of navigation
Cross References Table of contents andindex include active cross references.
Table of contents and
index
Page/chapter numbers
in the text
Lines are active cross references. Click on the line andthe appropriate pageis accessed.
Page/chapternumbers with cross references areactive links.
10 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 11
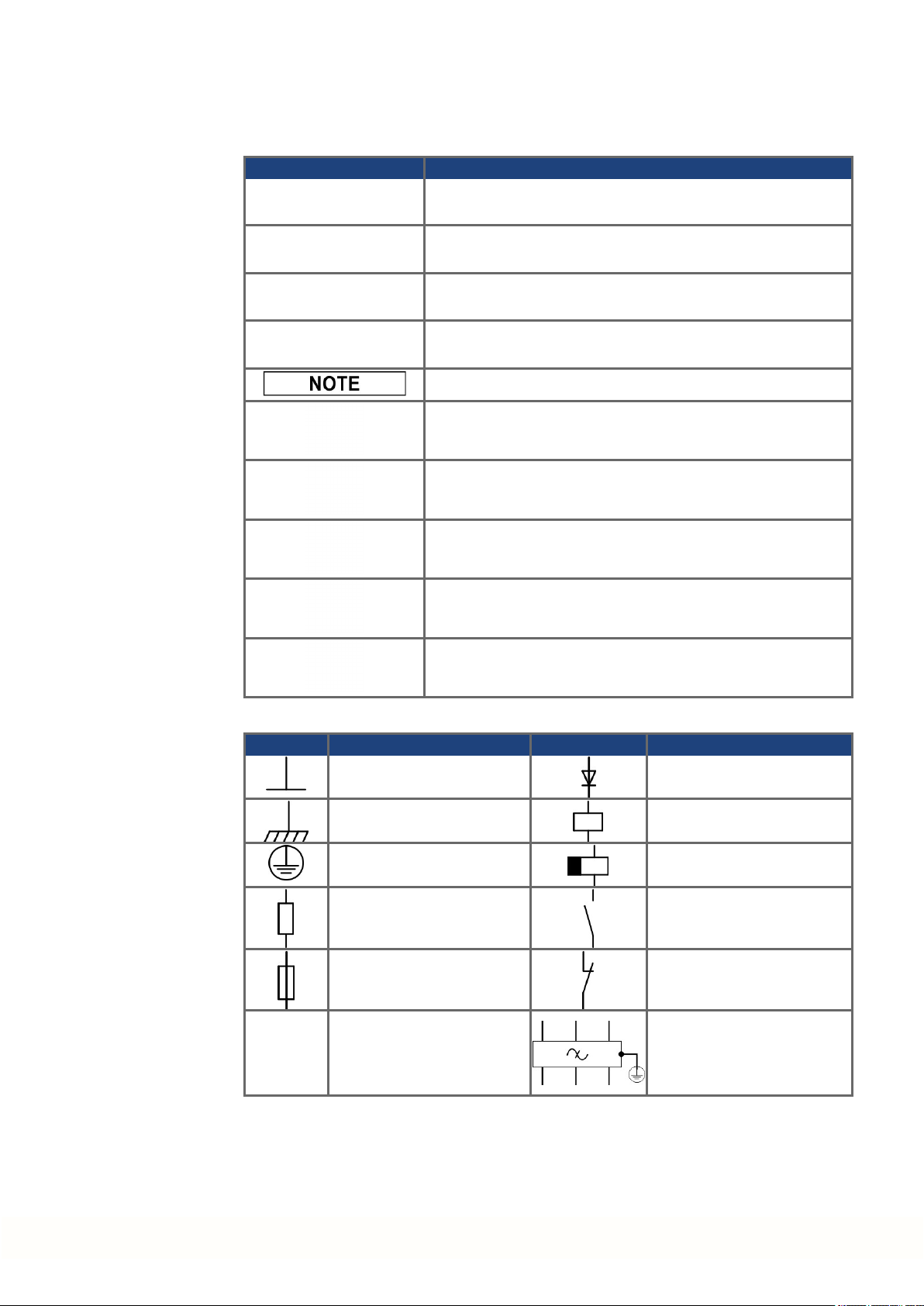
2.3 Symbols Used
Warning Symbols
AKD2G-S Installation, Safety 1 | 2 General
Symbol Indication
Indicates a hazardous situation which, if not avoided, will result
in death or serious injury.
Indicates a hazardous situation which, if not avoided, could result in death or serious injury.
Indicates a hazardous situation which, if not avoided, could result in minoror moderate injury.
Indicates situations which, if not avoided, could result in property damage.
This symbol indicates important notes.
Warning of a danger (general). Thetype of danger is specified
by the text next to the symbol.
Warning of danger from electricity andits effects.
Warning of danger from hot surface.
Warning of danger from suspendedloads.
Warning of danger from automatic start.
Drawing symbols
Symbol Description Symbol Description
Signal ground Diode
Chassis ground Relay
Protective earth Relay switch off delayed
Resistor Normally open contact
Fuse Normally closed contact
State-of-the-art firewall EMC filter
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 11
Page 12
AKD2G-S Installation, Safety 1 | 2 General
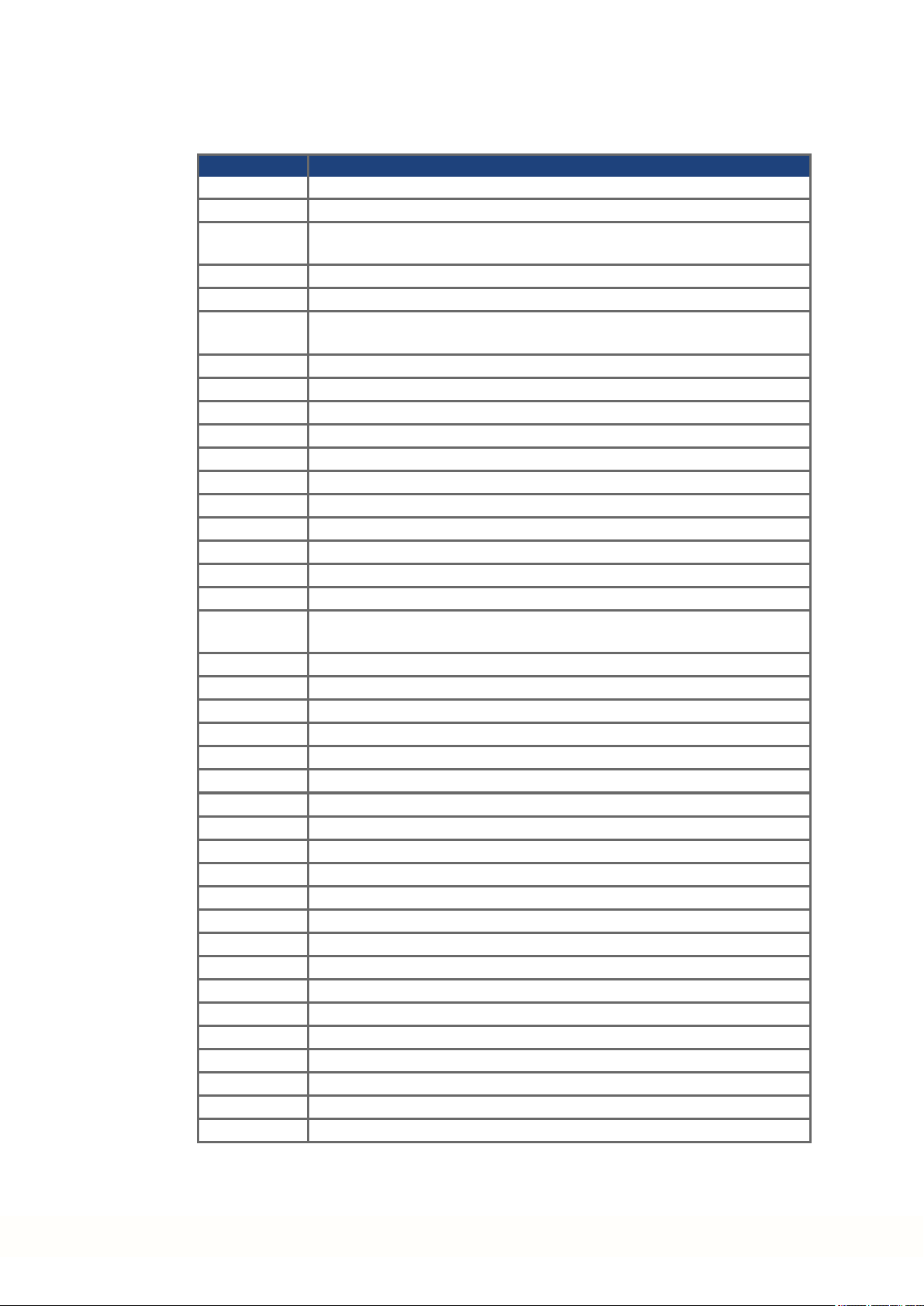
2.4 Abbreviations Used
Abbreviations related to functional safety (➜ # 125).
Abbreviation Meaning
(➜ # 53) "see page53" in this document
Ω Ohms
A#, AXIS# A# or AXIS# are placeholders for the axis number. Used with keywords or
signal names
AGND Analog ground
AMSL Above mean sea level
Axis Depends on context, either one AKD2G output stageor one load axis of
the full motionsystem.
CAT Category
CE Communité Européenne
COM Serial interface for a personal computer
DGND Digital ground
EEPROM Electrically erasableprogrammable memory
EEO EmulatedEncoder Output
EMC Electromagnetic compatibility
EMF Electromagnetic force
F-SMA Fiber optic cable connector accordingto IEC 60874-2
FSoE Fail safe over EtherCAT
KAS Kollmorgen AutomationSuite
KAS IDE Setup software (Kollmorgen AutomationSuite Integrated Development
Environment)
KDN Kollmorgen Developer Network
LED Light-emitting diode
LSB Low significant byte (orbit)
MSB Main significant byte (or bit)
NI Zero pulse
OSSD Output Signal Switching Device
PC Personal computer
PE Protective earth
PELV Protective Extra Low Voltage
PLC Programmable logic control
PWM Pulse-width modulation
RAM Random access memory (volatile memory)
RBrake/RB Regenresistor (also calleda brake resistor)
RBext External regenresistor
RBint Internal regenresistor
RCD Residual current device
RES Resolver
S1 Continuous operation
tbd To be discussed (in process)
VAC Volts, alternatingcurrent
VDC Volts, direct current
12 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 13
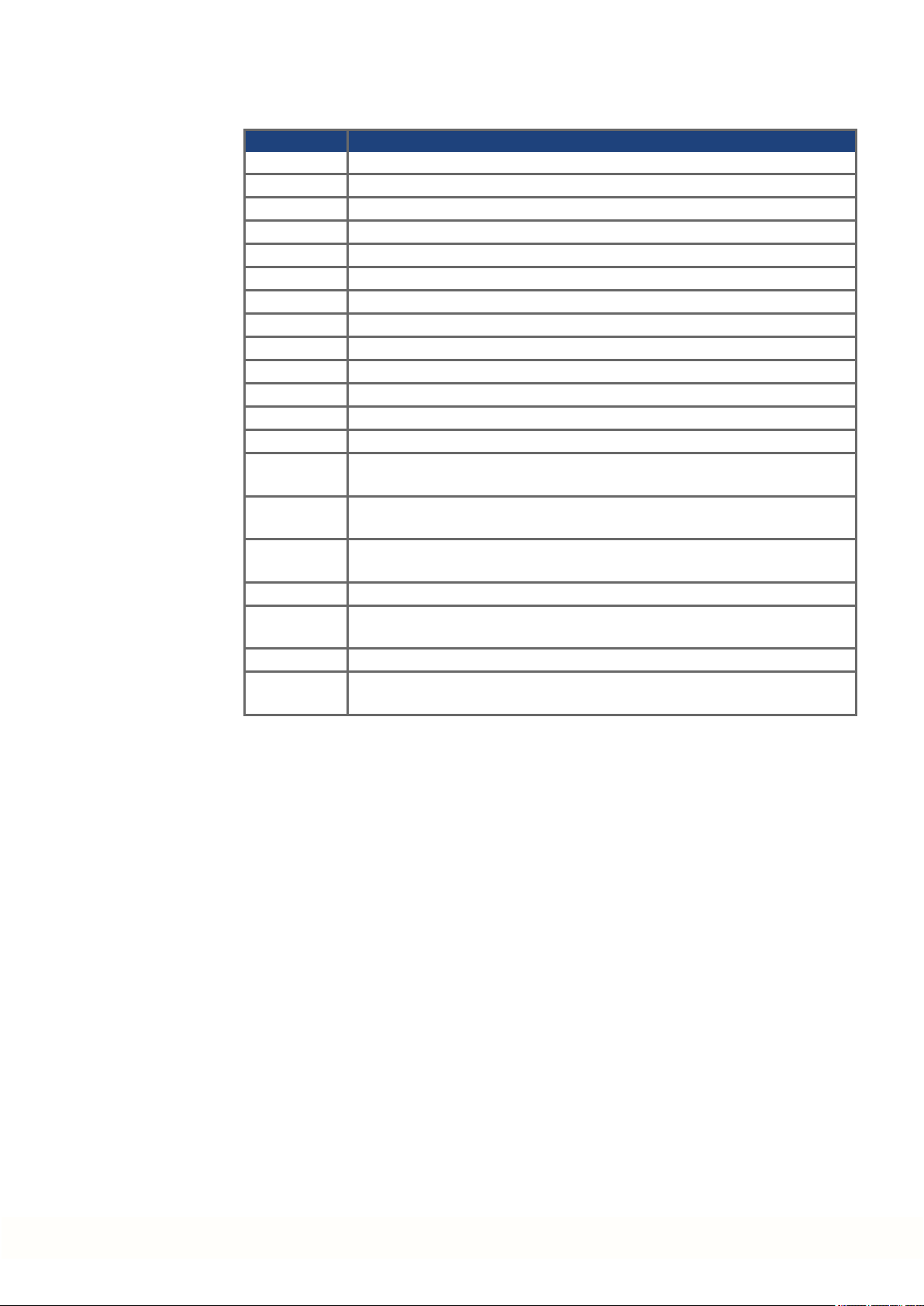
2.5 Referred Standards
Standard Content
ISO 4762 Hexagon socket head cap screws
ISO 11898 Road vehicles — Controller area network (CAN)
ISO 12100 Safety of machinery: Basic concepts, general principles for design
ISO 13849 Safety of machinery: Safety-related parts of control systems
IEC 60085 Electrical insulation - Thermal evaluation and designation Maintenance
IEC 60204 Safety of Machinery: Electrical equipment of machinery
IEC 60364 Low-voltageelectrical installations
IEC 60439 Low-Voltage Switchgear andControlgear Assemblies
IEC 60529 International protection rating(IP code)
IEC 60664 Insulationcoordination for equipment within low-voltagesystems
IEC 60721 Classification of environmental conditions
IEC 61000 Electromagnetic compatibility (EMC)
IEC 61131 Programmable controllers
IEC 61784 Industrial communicationnetworks - Profiles,
IEC 61491 Electrical equipment of industrial machines – Serial data link for real-time
IEC 61508 Functional safety of electrical/electronic/programmableelectronic safety-
IEC 61800 Adjustable speedelectrical power drive systems
IEC 62061 Functional safety of electrical/electronic/programmableelectronic safety-
IEC 82079 Preparationof instructions for use - Structuring, content andpresentation
UL 61800-5-1 Adjustablespeed electrical powerdrive systems,
AKD2G-S Installation, Safety 1 | 2 General
Part 3-12 Functional safety fieldbuses
communications between controls and drives.
related systems
related systems
Safety Requirements – Electrical, Thermal, andEnergy
IEC - International Electrotechnical Commission
ISO - International Organizationfor Standardization
UL - Underwriters Laboratories
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 13
Page 14
AKD2G-S Installation, Safety 1 | 3 Product Safety
3 Product Safety
3.1 You should pay attention to this 15
3.2 Shock-hazard Protection 17
3.3 Stop / Emergency Stop / Emergency Off 18
3.4 Warning note labels 20
3.5 Use as Directed 21
3.6 Prohibited Use 22
14 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 15
3.1 You should pay attention to this
This section helps to recognize risks and avoid dangers to people andobjects.
Specialist staff required!
Only properly qualified personnel arepermitted to perform such tasks as transport, installation and setup. Qualified specialist staff are persons with expertise in transport, installation,
assembly, commissioning and operation of electrotechnical equipment.
Transport, storage, unpacking: only by personnel with knowledge of handling electrostatically sensitive components.
Mechanical installation: only by personnel with mechanical expertise.
Electrical installation: only by personnel with electrotechnical expertise.
Basic tests / setup: only by personnel with expertise in electrical engineeringand drive
technology.
The qualified personnel must know and observe ISO 12100/ IEC 60364 / IEC 60664 and
national accident preventionregulations.
Read the documentation!
Read the available documentationbeforeinstallationand commissioning. Improperhandling
of the devices can cause harm to people or damage to property. The operatorof systems
using the drive system must ensure that all personnel who work with the drive read and understand the manual before using the drive.
AKD2G-S Installation, Safety 1 | 3 Product Safety
Check Hardware Revision!
Check the Hardware Revision Number of the product (see product label). This numberis the
link between your product andthe manual. The product Hardware Revision Number must
match the HardwareRevision Number onthe cover page of the manual.
Pay attention to the technical data!
Adhere to the technical data and the specifications on connection conditions. If permissible
voltage values or current values are exceeded, the devices can be damaged. Unsuitable
motororwrong wiring will damage the system components. Check the combination of drive
andmotor. Comparethe ratedvoltageand current of the units.
Perform a risk assessment!
The manufacturer of the machine must generate a risk assessment for the machine, andtake
appropriate measures to ensure that unforeseenmovements cannot cause injury or damage
to any person orproperty. Additional requirements on specialist staff may also result from the
risk assessment.
Automatic restart
The drive might restart automatically after power on, voltage dip or interruption of the supply
voltage, dependingon the parameter setting. Risk of death or serious injury for humans working in the machine.
If the parameterAXIS#.ENDEFAULT is set to 1, then place a warning sign to the machine
(Warning: Automatic Restart at Power On) and ensure, that power on is not possible, while
humans are in a dangerous zone of the machine. In case of using an undervoltageprotection
device, you must observe EN 60204-1:2006chapter 7.5 .
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 15
Page 16

AKD2G-S Installation, Safety 1 | 3 Product Safety
Observe electrostatically sensitive components!
The devices contain electrostatically sensitive components which may be damaged by incorrect handling. Electrostatically discharge your body before touching the device. Avoid contact with highly insulatingmaterials (artificial fabrics, plastic film etc.). Place the device on a
conductive surface.
Hot surface!
Drives may have hot surfaces duringoperation. The housing can reach temperatures above
80°C. Risk of minor burns! Measurethe temperature, andwait until the housing has cooled
down below 40 °C before touchingit.
Earthing!
It is vital that you ensure that the drive is safely earthed to the PE (protective earth)busbarin
the switch cabinet. Risk of electric shock. Without low-resistance earthing no personal protection can be guaranteed.
Leakage Current!
Since the leakagecurrent to PE is more than3.5 mA, in compliance with IEC61800-5-1the
PE connection must eitherbe doubled or a connecting cable with a cross-section >10 mm²
must be used. Deviating measures according to regional standards might be possible.
High voltages!
The equipment produces highelectric voltages up to 900 V. Lethal danger exists at live parts
of the device. Do not open or touch the equipment duringoperation. Keep all covers and cabinet doors closed. Built-in protection measures such as insulation or shielding may not be
removed. Work on the electrical installation may only be performedby trainedand qualified
personnel, in compliance with the regulations for safety at work, and only with switchedoff
mains supply, and securedagainst restart.
Never undo any electrical connections to the drive while it is live. There is a danger of electrical arcing with damageto contacts and personal injury. Wait at least 5 minutes after disconnecting the drive from the main supply power before touching potentially live sections of
the equipment (such as contacts) or removing any connections.
Always measure the voltage in the DC bus link and wait until the voltage is below 50 V
before handling components.
Functional Safety!
Beta drives: Safety functionality is not approvednor certified. Do not use this functionality in
applications with functional safety request.
The assessment of the safety functions according to EN13849or EN 62061must finally be
done by the user.
Reinforced Insulation
Thermal sensors, motor holdingbrakes and feedback systems built into the connected motor
must have reinforced insulation(according to IEC61800-5-1) against system components
with powervoltage, accordingto the required application test voltage. All Kollmorgen components meet these requirements.
Never modify the drive!
It is not allowed to modify the drive hardwarewithout permission by the manufacturer. Opening the housing causes loss of warranty.
16 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 17
3.2 Shock-hazard Protection
3.2.1 Leakage current
Leakagecurrent via the PE conductor results from the combination of equipment and cable
leakage currents. Theleakagecurrent frequency patternincludes a number of frequencies,
whereby the residual-current circuit breakers definitively evaluate the 50 Hz current. For this
reason, the leakagecurrent cannot be measured using a conventional multimeter. Contact
ourapplication department for help to calculate the leakage current in your application.
Since the leakagecurrent to PE is more than3.5 mA, in compliance with IEC61800-5-1the
PE connection must eitherbe doubled or a connecting cable with a cross-section >10 mm²
must be used. Use the PE terminal and the PE connection screws in orderto fulfill this
requirement.
The followingmeasures can be used to minimize leakagecurrents:
Reduce the length of the engine cable.
Use low capacitance motor cables (➜ # 52).
3.2.2 Residual current protective device (RCD)
In conformity with IEC 60364-4-41 – Regulations for installationand IEC 60204– Electrical
equipment of machinery, residual current protective devices (RCDs) can be usedprovided
the requisite regulations arecomplied with. The AKD2G is a 3-phase system with a B6
bridge. Therefore, RCDs which aresensitive to all currents must be used in order to detect
any DC fault current.
Rated residual currents in the RCDs:
AKD2G-S Installation, Safety 1 | 3 Product Safety
10 to 30 mA Protection against "indirect contact" (personal fire protection)for stationary
50 to 300 mA Protection against "indirect contact" (personal fire protection) for stationary
Recommendation: In order to protect against direct contact (with motor cables shorter than
5 m) Kollmorgen recommends that each drive be protectedindividually using a 30 mA RCD
which is sensitive to all currents.
If you use a selective RCD, the more intelligent evaluation process will prevent spurious trippingof the RCD.
3.2.3 Isolating transformers
When protection against indirect contact is absolutely essential despite a higher leakage current, or when analternative form of shock-hazard protection is sought, the AKD2G can also
be operated via an isolating transformer. A ground-leakage monitorcan be usedto monitorfor
short circuits.
Keepthe length of wiring between the transformer andthe drive as short as possible.
andmobile equipment, as well as for "direct contact".
equipment
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 17
Page 18
AKD2G-S Installation, Safety 1 | 3 Product Safety
3.3 Stop / Emergency Stop / Emergency Off
The control functions Stop, Emergency Stop andEmergency Off are defined by IEC 60204.
Notes for safety aspects of these functions can be found in ISO 13849and IEC 62061.
The parameterAXIS#.DISMODE must be set to implement the different stop categories.
Consult the WorkBench Online Help for configuring the parameter.
No functional safety!
Serious injury could result when the load is not properly blocked. With vertical load the load
could fall.
Functional safety, e.g. with hangingload (vertical axes), requires an additional mechanical brake which must be safely operated, for exampleby a safety control.
Set parameterAXIS#.MOTOR.BRAKEIMM to 1 with vertical axes, to apply the motor
holdingbrake (➜ # 82) immediately after faults or Hardware Disable.
3.3.1 Stop
The stop function shuts down the machinein normal operation. The stop function is defined
by IEC 60204.
The Stop Category must be determinedby a risk evaluation of the machine.
Stop function must have priority over assigned start functions. The following stop categories
aredefined:
Stop Category 0
Shut-down by immediate switching-off the energy supply to the drive machinery (this is an
uncontrolled shut-down). With the safety function STO (➜ # 127) the drive can be stopped
using its internal electronics (IEC 62061 SIL2).
Stop Category 1
A controlled shut-down, whereby the energy supply to the drive machinery is maintainedto
perform the shut-down, and the energy supply is only interrupted whenthe shut-down has
been completed.
Stop Category 2
A controlled shut-down, whereby the energy supply to the drive machinery is maintained.
Stop Category 0 and Stop Category 1 stops must be operableindependently of the operating
mode, whereby a Category 0 stop must have priority.
If necessary, provision must be made for the connection of protective devices and lock-outs.
If applicable, the stop function must signal its status to the control logic. A reset of the stop
function must not create a hazardous situation.
18 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 19
3.3.2 Emergency Stop
The Emergency Stop function is used for the fastest possible shutdown of the machine in a
dangerous situation. The Emergency Stop function is defined by IEC 60204. Principles of
emergency stop devices and functional aspects are defined in ISO 13850.
The Emergency Stop function will be triggeredby the manual actions of a single person. It
must be fully functional and available at all times. The user must understandinstantly how to
operate this mechanism (without consulting references or instructions).
The Stop Category for the Emergency Stop must be determinedby a risk evaluation of the
machine.
In additionto the requirements for stop, the Emergency Stop must fulfil the following requirements:
Emergency Stop must have priority over all otherfunctions andcontrols in all operating
modes.
The energy supply to any drive machinery that could cause dangerous situations must be
switched off as fast as possible, without causing any further hazards (Stop Category 0)
or must be controlledin such a way, that any movement that causes danger, is stopped
as fast as possible (Stop Category 1).
The reset must not initiate a restart.
AKD2G-S Installation, Safety 1 | 3 Product Safety
3.3.3 Emergency Off
The Emergency Off function is used to switch-off the electrical power supply of the machine.
This is done to prevent users from any risk from electrical energy (for example electrical
impact). Functional aspects for Emergency Off aredefinedin IEC 60364-5-53.
The Emergency Off function will be triggeredby the manual actions of a single person.
The result of a risk evaluation of the machine determines the necessity for an Emergency
Off function.
Emergency Off is doneby switching off the supply energy by electro-mechanical switching
devices. This results in a category 0 stop. If this stop category is not possible in the application, then the Emergency Off function must be replaced by other measures (for example by
protection against direct touching).
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 19
Page 20
AKD2G-S Installation, Safety 1 | 3 Product Safety
3.4 Warning note labels
If a warningnote label is damaged, it must be replaced immediately.
3.4.1 Notes placed on the product
AKD2G
Wait 5 minutes
after removing power
before servicing.
3.4.2 Adhesive label in the package
To meet UL, place the multi-languagelabel on the drive or on the panel near the drive.
20 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 21

3.5 Use as Directed
The AKD2G drives are exclusively intended for drivingsuitablesynchronous servomotors
with closed-loopcontrol of torque, speed, and/or position.
AKD2G are components that are built into electrical plants or machines and can only be operated as integral components of these plants or machines. The manufacturer of the machine
used with a drive must generate a risk assessment for the machine. When the drives arebuilt
into machines or plant, the drive must not be used until it has beenestablished that the
machine or plant fulfills the requirements of the regional directives.
Cabinet and wiring
Drives must only be operated in a closed control cabinet suitable for the ambient conditions
(➜ # 33). Ventilationor cooling may be necessary to keep the temperature within the cabinet
below 40°C.
Use only copper conductors for wiring. The conductor cross-sections can be derived from the
standard IEC 60204 (alternatively for AWG cross-sections: NEC Table 310-16, 75°C
column).
Power supply
The drives can be supplied by 1, 2 or 3 phase industrial supply networks.
Drives in the AKD2G series can be suppliedas follows:
AKD2G-S Installation, Safety 1 | 3 Product Safety
AKD2G-Sxx-6Vxx:
1, 2 or 3 phase industrial supply networks (not morethan200 kA symmetrical rated current at 120 V and 240V).
AKD2G-Sxx-7Vxx:
3 phase industrial supply networks (not more than200 kA symmetrical ratedcurrent at
240V, 400 V and480 V).
Connection to other voltage types of supply networks is possible with an additional isolating
transformer.
Repeated overvoltages betweenphases (L1, L2, L3) and the housingof the drive must not
exceed1000 V peak. In accordance with IEC 61800, voltagespikes (< 50 µs) between
phases must not exceed1000 V. Voltagespikes (<50µs) between a phase and the housing
must not exceed 2000 V.
EMC filter measures for AKD2G-Sxx-6Vxx must be implemented by the user.
Motor voltage rating
The rated voltage of the motors must be at least as high as the DC bus link voltage divided
by √2 produced by the drive (U
nMotor
>=UDC/√2).
Functional Safety
Beta Drives: Safety functionality is neither approved norcertified yet. Do not use this functionality in applications with functional safety request until further notice.
The network, to which the drive is connected, must be secured according to state-of-theart information technology security requirements.
The userIT specialists shall analyze whetherfurther security requirements are applicableto ensure functional safety.
Review the chapter"Use as Directed" in the Functional Safety section (➜ # 123)before
using safety functionality.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 21
Page 22

AKD2G-S Installation, Safety 1 | 3 Product Safety
3.6 Prohibited Use
Otheruse thanthat described in chapter “Use as directed” is not intended and can lead to personnel injuries andequipment damage. The drive may not be used with a machine that does
not comply with appropriate national directives or standards. The use of the drive in the following environments is also prohibited:
potentially explosive areas
environments with corrosive and/or electrically conductive acids, alkaline solutions, oils,
vapors, dusts
ships or offshore applications
The drive must not be connected directly to the Internet. If the network, to which the drive is
connected, is not secured according to state-of-the-art information technology, this could be
a functional safety risk.
22 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 23
AKD2G-S Installation, Safety 1 | 4 Product life cycle handling
4 Product life cycle handling
4.1 Transport 24
4.2 Packaging 24
4.3 Storage 24
4.4 Installation, setup and normal operation 25
4.5 Decommissioning 25
4.6 Maintenance and cleaning 25
4.7 Disassembly 25
4.8 System Repair 26
4.9 Disposal 26
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 23
Page 24
AKD2G-S Installation, Safety 1 | 4 Product life cycle handling
4.1 Transport
Transport the AKD2G in accordance with IEC 61800-2 as follows:
Transport only by qualifiedpersonnel in the manufacturer’s original recyclablepackaging.
Avoid shocks while transporting.
Vibration/Shock: AKD2G is tested for environmental class 2M1 of IEC 60721-3-2.
Store at or below maximum stacking height 8 cartons (see "Storage" (➜ # 24))
Transport only within specified temperatureranges:
-25to +70 °C, max. rate of change 20K/hour, class 2K3.
Transport only within specified humidity:
max. 95% relative humidity at +40°C, no condensation, class 2K3.
The drives containelectrostatically sensitive components that can be damaged by incorrect
handling. Electrostatically dischargeyourself beforetouching the drive. Avoid contact with
highly insulating materials, such as artificial fabrics and plastic films. Place the drive on a
conductive surface.
If the packagingis damaged, check the unit for visible damage. Inform the shipperand the
manufacturer of any damageto the package orproduct.
4.2 Packaging
4.3 Storage
The AKD2G packaging consists of recyclable cardboard with inserts and a label on the outside of the box.
Model Package
(mm) HxWxL
AKD2G-Sxx-6V03 to 6V12 tbd 4.2
AKD2G-Sxx-7V03 to 7V12 tbd 4.3
Matingconnectors arenot included in the packageof a standarddrive.
Matingconnectors areincluded whenthe drive is orderedwith accessories (append “-A”to
the model number).
Store the AKD2G in accordance with IEC 61800-2 as follows:
Store only in the manufacturer’s original recyclable packaging.
Store at or below maximum stacking height 8 cartons.
Store only within specified temperature ranges: -25to +55 °C, max.rate of change
20K/hour, class 1K4.
Storage only within specified humidity: 5 to 95% relative humidity, no condensation, class
1K3.
Store in accordance with the following durationrequirements:
Less than 1 year: without restriction.
More than 1 year: capacitors must be re-formed before setting up and operating the
drive. Re-forming procedures aredescribedin the KollmorgenDeveloper Network
(Forming).
Total Weight
(kg)
24 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 25

AKD2G-S Installation, Safety 1 | 4 Product life cycle handling
4.4 Installation, setup and normal operation
Installation andsetup informationare given in this manual:
Mechanical installation (➜ # 45)
Electrical installation(➜ # 48)
Setup (➜ # 111)
Normal operation tested for environmental class 3K3 according to IEC 61800-2(➜ # 33).
The manufacturer of the machine defines the necessary enduser expertise basedonthe risk
assessment for the machine and describes the requirements for normal operation based on
the application.
4.5 Decommissioning
Only professional staff who arequalified in electrical engineering are allowed to decommission parts of the system.
DANGER: Lethal Voltages!
There is a dangerof serious personal injury or death by electrical shock or electrical arcing.
Switch off the main switch of the switchgear cabinet.
Securethe system against restarting.
Block the main switch.
Wait at least 5 minutes after disconnecting.
4.6 Maintenance and cleaning
The device does not require maintenance. Opening the device voids the warranty. The inside
of the unit can only be cleanedby the manufacturer.
Do not immerse or spray the device. Avoid that liquid enters the device.
To clean the device exterior:
1. Decommission the device (see chapter 4.5 "Decommissioning").
2. Casing: Clean with isopropanol or similar cleaning solution.
Caution : Highly Flammable! Risk of injury by explosionand fire.
Observe the safety notes given on the cleaning liquidpackage.
Wait at least 30 minutes after cleaningbeforeputting the device back into operation.
3. Protective grill on fan: Clean with a dry brush.
4.7 Disassembly
Only professional staff who arequalified in electrical engineering are allowed to disassemble
parts of the system.
1. Decommission the device (see chapter 4.5 "Decommissioning").
2. Check temperature.
CAUTION: High Temperature! Risk of minor burns. During operation, the heat sink of
the drive may reach temperatures above 80°C (176°F). Before touching the device,
check the temperature andwait until it has cooled below 40°C (104°F).
3. Remove the connectors. Disconnect the potential earth connection last.
4. Demount: loosen the fastening screws. Remove the device.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 25
Page 26
AKD2G-S Installation, Safety 1 | 4 Product life cycle handling
4.8 System Repair
Only professional staff who arequalified in electrical engineering are allowed to exchange
parts of the drive system.
CAUTION: Automatic Start! During replacement work a combination of hazards andmul-
tiple episodes may occur.
Work on the electrical installationmay only be performed by trained andqualified personnel, in compliance with the regulations for safety at work, andonly with use of prescribed personal safety equipment.
Exchange of the device
Only the manufacturercan repairthe device. Opening the device voids the warranty.
1. Decommission the device (see chapter 4.5 "Decommissioning").
2. Demount the device (see chapter4.7 "Disassembly").
3. Send the device to the manufacturer.
4. Install a new device as described in this manual.
5. Setup the system as described in this manual.
Exchange of other drive system parts
If parts of the drive system (forexample cables) must be replaced, proceed as follows:
4.9 Disposal
1. Decommission the device (see chapter 4.5 "Decommissioning").
2. Exchange the parts.
3. Check all connections for correct fastening.
4. Setup the system as described in this manual.
To dispose the unit properly, contact a certified electronic scrap disposal merchant.
In accordance with the WEEE-2012/19/EC guidelineand similar, the manufacturer accepts
returns of old devices and accessories for professional disposal. Transport costs are the
responsibility of the sender.
Contact Kollmorgen andclarify the logistics.
Sendthe devices in the original packaging to the manufacturer address:
North America South America
KOLLMORGEN
201West Rock Road
Radford, VA 24141, USA
Europe Asia
KOLLMORGEN Europe GmbH
Pempelfurtstr. 1
40880Ratingen, Germany
KOLLMORGEN
AvenidaJoãoPaulo Ablas, 2970
Jardim da Glória, Cotia – SP
CEP 06711-250, Brazil
KOLLMORGEN
Floor 4, Building 9, No. 518,
North FuquanRoad, Changning District,
Shanghai 200335, China
26 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 27
AKD2G-S Installation, Safety 1 | 5 Package
5 Package
5.1 Package Supplied 28
5.2 Nameplate 28
5.3 Part Number Scheme 29
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 27
Page 28

AKD2G-S Installation, Safety 1 | 5 Package
5.1 Package Supplied
When a standard drive from the AKD2G series is delivered, the following items areincluded
in the drive package:
AKD2G
Printedcopy of AKD®2G Product Safety Guide .
DVD with WorkBench setup software .
Panel safety label
Matingconnectors arenot included in the packageof a standarddrive.
Matingconnectors areincluded whenthe drive is orderedwith accessories (append “-A”to
the model number). With the accessories option all connectors to match the drive variant are
included, excepting SubD (Feedback 3), RJ25 (CAN bus) andRJ45 (service and fieldbus
networks).
Accessories Sold Separately
Accessories must be ordered separately if required.
EMC filters for mains supply voltage, categories C2 or C3.
External regenresistor.
Connector kits
Hybrid cable. Assembled hybridmotor cables are available for all regions.
Motorcable. Assembledmotor cables are available for all regions.
Feedback cable. Assembled feedback cables areavailable for all regions.
SFA (Smart Feedback Adapter) .
SDB Module (Safe Dynamic Brake Module).
Ethernet service cable.
5.2 Nameplate
A nameplate is attached to the side of the drive. The picturebelow is similar to the nameplate
on the device.
28 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 29
5.3 Part Number Scheme
Use the part numberscheme for product identification only, not for the order process,
because not all combinations of features are possible.
Matingconnectors arenot included in the packageof a standarddrive.
Matingconnectors areincluded whenthe drive is orderedwith accessories (append “-A”to
the model number).
AKD2G-S Installation, Safety 1 | 5 Package
Example AKD2G-SPE-7V06S-A1IO-0000
AKD2G IP20 housing, position indexer, EtherCAT, 240 V to 480 V mains supply, 6 A rated
current, single axis, HardwareRevision A, dual channel STO SIL2 PLd, with additional I/O
connector X22, uncoated, no mating connectors.
Example AKD2G-SPE-6V03D-A1DX-A000-A
AKD2G IP20 housing, position indexer, EtherCAT, 120 V to 240 V mains supply, 2 x 3 A
rated current, dual axis, HardwareRevision A, dual channel STO SIL2 PLd, with all possible
connector (basis + X23), PCBs coated, with mating connectors.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 29
Page 30
AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6 Technical description and data
6.1 The AKD2G Family of Digital Drives 31
6.2 Ambient Conditions, Ventilation, and Mounting Position 33
6.3 Mechanical Data 33
6.4 Performance Data 34
6.5 Electrical data 35
6.6 LCD Display and Push-buttons (B1, B2) 39
6.7 SD Card Slot 41
6.8 Electrical Motor Braking 42
30 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 31

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.1 The AKD2G Family of Digital Drives
Available AKD2G-SP (Position Indexer) versions
Connectivity Voltage Current Axis Rev Safety
N-: Analog
C-: CANopen
E-: EtherCAT
Connector Options for Drives with
Functional Safety 1
Single Axis Dual Axis
00: Basis (X21)
IO: Basis + X22
F3: Basis + X23
DX: Basis + X22+X23
Standard features
Singleaxis or dual axis in one housing
Supply voltages: single phase AC, dual phase AC, three phase AC
Singleorgroupsupply, single or groupmains fusing
Motionbus on board, TCP/IP service channel on board
SFD3, HIPERFACE DSL motor feedback support on board
Support for second feedback
Step / Direction input on board
Encoder emulation on board
Use with synchronous servomotors, linear motors, and induction machines
SIL2 / PLd dual channel STO
6V:
120/240VAC 1~
240VAC 3~
7V:
240/400/480VAC 3~
03: 3 A
06: 6 A
12: 12 A
S-: Single
D-: Dual I1=I2
00: Basis (X21, X22)
F3: Basis + X23
DX: Basis + X23
A 1: SIL2 STO
Power section
One, two or three phase AC supply, voltage range85 to 528 V, 47 to 63 Hz.
Connection to higherAC voltage mains only via isolating transformer.
Fusingto be provided by the user.
B6 bridge rectifier, integral soft-start circuit.
DC bus link voltage range 120 to 750VDC
Output stage IGBT modulewith floatingcurrent measurement.
Internal regen resistor for all models, external regenresistor if required.
Functional Safety
Safety option 1: SIL2 / PLd dual channel STO, command by I/O, (➜ # 127).
Electrical safety
Appropriate insulation / creepagedistances andelectrical isolationfor safe electrical separation, perIEC 61800-5-1, between the powerinput / motor connections andthe signal
electronics.
Soft-start, overvoltage detection, short-circuit protection, phase-loss detection.
Temperature monitoring of the drive and motor.
Motoroverload protection: foldback mechanism.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 31
Page 32

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
Auxiliary supply voltage 24V DC
From an external, safety approved24 V ±10% powersupply (PELV).
Parameter setting
Setup software WorkBench for setup via TCP/IP.
Downloadcontrol parameterpackages via CoE
Full digital control
Digital current loop(update period 1.2 µs / 62.5 µs)
Digital velocity loop(update period 62.5 µs)
Digital position loop (update period 250µs)
Inputs/Outputs (X21/X22/X23)
Usability depends on connector availability and usage.
2 programmable analog input (➜ # 101)
2 programmable analog output (➜ # 102)
12 programmabledigital inputs (➜ # 103)
8 programmable digital outputs (➜ # 107)
6 programmable digital input/outputs (➜ # 107)
4 safe STO inputs (dual channel STO per axis) (➜ # 123)
Connector Options
IO: X22 connector with additional digital inputs andoutputs.
F3: X23 connectorfor conventional motor feedbacks (Resolver, SFD, Tamagawa Smart
Abs, Comcoder, 1Vp-p Sin-Cos encoders, incremental encoders, EnDAT 2.1/2.2).
DX: all possible connectors for extended I/O and feedback connections.
Customization
0000: uncoated PCBs, standard
0xxx: uncoatedPCBs, customized coding
A000: coatedPCBs, standard
Axxx: coated PCBs, customized coding
Connectivity
Feedback inputs (➜ # 88)
Encoder emulation output (➜ # 91)
Digital Inputs/Outputs (➜ # 99)
Service Interface (➜ # 98)
CANopen (➜ # 95)
MotionBus interface (➜ # 94)
Accessories
SFA (Smart Feedback Adapter) (➜ # 89).
Hybrid motor cables, motor powercables, motor feedback cables.
External regenresistors.
Foraccessories referto your regional Accessories Manual.
32 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 33

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.2 Ambient Conditions, Ventilation, and Mounting Position
Storage, Transport (➜ # 24)
Normal operation Environmental class 3K3 according to IEC 61800-2
Surrounding temperature in operation
Humidity in operation Relative humidity 5 to 85%, no condensation, IEC 61800-2class
Site altitude Up to 1000 m above mean sea level (AMSL): no restriction
Pollution level Pollutionlevel 2 as per IEC 60664-1
Vibration Class 3M1 according to IEC 61800-2
Shock Class L accordingto IEC 61800-2
Drive protection IP 20 according to IEC 60529
Drive EMC immunity Increased immunity accordingto EN 61800-5-2
Mounting Vertical position, in a cabinet with protection of at least IP 54
Ventilation Built-in fan in all drive variants
Internal regen resistor used:
0 to +40 °C underrated conditions
+40 to +60 °C with current derating3 % perKelvin
Internal regen resistor not used:
0 to +50 °C underrated conditions
+50 to +60 °C with current derating2 % perKelvin
3K3
1,000 to 2,000 m AMSL: power derating 1.5%/100 m
Maximum altitude: 2000 m AMSL
The drive shuts down in case of excessively high temperature in
the control cabinet. Make sure sufficient forced ventilationis suppliedwithin the control cabinet.
6.3 Mechanical Data
Weight (with X22 and X23) kg 2.6 2.9 2.6 2.9
Width mm 76 75 76 75
Height, without connectors
front/back
Height, with connectors mm 303 340 303 340
Depth, without connectors mm 221 221 221 221
Depth, with connectors mm <235 <235 <235 <235
Dimension Drawingsee section Mechanical Installation (➜ # 45).
AKD2G-Sxx-
Units 6V03S,
6V06S,
6V12S
mm 220/235 255/272 220/235 255/272
7V03S,
7V06S,
7V12S
6V03D,
6V06D
7V03D,
7V06D
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 33
Page 34

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.4 Performance Data
Performance Data Units 6V03, 6V06, 6V12,
Normal Switchingfrequency (dynamic) kHz 15 12
Loaded Switching Frequency (dynamic) kHz 10.4 8.2
Current Loop Update Period µs 1.28*
Velocity Loop Update Period µs 62.5
Position Loop Update Period µs 250
Current Loop Bandwidth Hz 3000
Velocity Loop Bandwidth Hz 750
Position Loop Bandwidth Hz 350
Max. motor electrical frequency Hz 599
* Control updates every 1.28 µs. Current commandis updated every 62.5 µs.
AKD2G-Sxx-
7V06, 7V12
7V03
34 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 35

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.5 Electrical data
6.5.1 Single axis variants (S)
6.5.1.1 Mains supply data, 1 phase AC, type AKD2G-Sxx- (S)
Input data Units 6V03S 6V06S 6V12S
Rated supply voltage (L1/N) VAC 1 x 100 V to 240 V
Rated supply input frequency Hz 50 Hz to 60 Hz ±5%
Permittedswitch on/off frequency 1/h 30
Rated input power@240V kVA 1.2 2.38 2.64
Rated input current at 1 x 110 Vac A 5 9.9 11
Rated input current at 1 x 240 Vac A 5 9.9 11
Max. inrush current A 10
Rated DC bus link voltage VDC 310
6.5.1.2 Mains supply data, 3 phase AC, type AKD2G-Sxx- (S)
Input data Units 6V03S 6V06S 6V12S 7V03S 7V06S 7V12S
Rated supply voltage (L1/L2/L3) VAC 3 x 100 V to 240 V 3 x 200 V to 480 V
Rated supply input frequency Hz 50 Hz to 60 Hz ±5%
Permittedswitch on/off frequency 1/h 30 30
Rated input power@240V (*480V) kVA 1.2 2.38 2.64 2.24* 4.49* 7.65*
Rated input current at 3 x 110 Vac A 2.9 5.7 9.2 - - Rated input current at 3 x 240 Vac A 5 5.7 9.2 2.7 5.4 9.2
Rated input current at 3 x 400 Vac A - - - 2.7 5.4 9.2
Rated input current at 3 x 480 Vac A - - - 2.7 5.4 9.2
Max. inrush current A 10
Rated DC bus link voltage VDC 310 620
6.5.1.3 Auxiliary voltage input data, 24V DC, type AKD2G-Sxx- (S)
Input data Units 6V03S 6V06S 6V12S 7V03S 7V06S 7V12S
Aux. voltage supply (PELV) VDC 24 V (±10%, check voltage drop)
- control current without motor brake A 1
- control current with one motorbrake A 3.5
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 35
Page 36

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.5.1.4 Output data, type AKD2G-Sxx- (S)
Units 6V03S 6V06S 6V12S 7V03S 7V06S 7V12S
Rheostatic energy dissipation
max. continuous power kW 1.5 3 6 12 12 12
internal regenresistor Ω 15 15 15 33 33 33
external regen resistor Ω 33 33 33 33 33 33
Continuous output current ( ± 3%)
at 1 x 110Vac Arms 3 6 12 - - at 1 x 240Vac Arms 3 6 12 - - at 3 x 110Vac Arms 3 6 12 - - at 3 x 240Vac Arms 3 6 12 3 6 12
at 3 x 400Vac Arms - - - 3 6 12
at 3 x 480Vac Arms - - - 3 6 12
Peak output current (for 5s, ± 3%) Arms 9 18 30 9 18 30
Continuous output power @ rated input current
at 1 x 110Vac kVA tbd tbd tbd - - -
at 1 x 240Vac kVA tbd tbd tbd - - -
at 3 x 110Vac kVA tbd tbd tbd - - -
at 3 x 240Vac kVA tbd tbd tbd tbd tbd tbd
at 3 x 400Vac kVA - - - tbd tbd tbd
at 3 x 480Vac kVA - - - tbd tbd tbd
Peak output power (for 1 s)
at 1 x 110Vac kVA tbd tbd tbd - - at 1 x 240Vac kVA tbd tbd tbd - - at 3 x 110Vac kVA tbd tbd tbd - - at 3 x 240Vac kVA tbd tbd tbd tbd tbd tbd
at 3 x 400Vac kVA - - - tbd tbd tbd
at 3 x 480Vac kVA - - - tbd tbd tbd
Emissions (low/high speed fan)
Noise emission dB(A) tbd tbd tbd tbd tbd tbd
Brake output
Voltage VDC 24 V (±10%)
Output current, minimum mA required100 (fault detection)
Output current, maximum A 2.5
36 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 37

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.5.2 Dual axis variants (D: I1=I2)
6.5.2.1 Mains supply data, 1 phase AC, type AKD2G-Sxx- (D)
Input data Units 6V03D 6V06D
Rated supply voltage (L1/N) VAC 1 x 100 V to 240 V
Rated supply input frequency Hz 50 Hz to 60 Hz ±5%
Permittedswitch on/off frequency 1/h 30
Rated input power@ 240V kVA 2.38 2.64
Rated input current at 1 x 110 Vac A 9.9 11
Rated input current at 1 x 240 Vac A 9.9 11
Max. inrush current A 10
Rated DC bus link voltage VDC 310
6.5.2.2 Mains supply data, 3 phase AC, type AKD2G-Sxx- (D)
Input data Units 6V03D 6V06D 7V03D 7V06D
Rated supply voltage (L1/L2/L3) VAC 3 x 100 V to 240V 3 x 200 V to 480V
Rated supply input frequency Hz 50 Hz to 60 Hz ±5%
Permittedswitch on/off frequency 1/h 30
Rated input power@ 240V (*480V) kVA 2.38 3.82 4.49* 7.65*
Rated input current at 3 x 110 Vac A 2.9 5.7 - Rated input current at 3 x 240 Vac A 5 5.7 5.4 9.2
Rated input current at 3 x 400 Vac A - - 5.4 9.2
Rated input current at 3 x 480 Vac A - - 5.4 9.2
Max. inrush current (at 240 V/480 V, 20°C) A 10
Rated DC bus link voltage VDC 310 620
6.5.2.3 Auxiliary voltage input data, 24V DC, type AKD2G-Sxx- (D)
Input data Units 6V03D 6V06D 7V03D 7V06D
Aux. voltage supply (PELV) VDC 24 V (±10%, check voltage drop)
- current without motorbrake A 1.25
- control current with one motorbrake A 3.75
- control current with two motor brakes A 6.25
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 37
Page 38

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.5.2.4 Output data, type AKD2G-Sxx- (D)
Units 6V03D 6V06D 7V03D 7V06D
Rheostatic energy dissipation
max. continuous power kW 1.5 3 3 6
internal regenresistor Ω 15 15 33 33
external regen resistor Ω 33 33 33 33
Continuous output current ( ± 3%)
at 1 x 110Vac Arms 2x3 2x6 - at 1 x 240Vac Arms 2x3 2x6 - at 3 x 110Vac Arms 2x3 2x6 - at 3 x 240Vac Arms 2x3 2x6 2x3 2x6
at 3 x 400Vac Arms - - 2x3 2x6
at 3 x 480Vac Arms - - 2x3 2x6
Peak output current (for 5s, ± 3%) Arms 2x9 2x18 2x9 2x18
Continuous output power @ rated input current
at 1 x 110Vac kVA tbd tbd - at 1 x 240Vac kVA tbd tbd - at 3 x 110Vac kVA tbd tbd - at 3 x 240Vac kVA tbd tbd tbd tbd
at 3 x 400Vac kVA - - tbd tbd
at 3 x 480Vac kVA - - tbd tbd
Peak output power (for 1 s)
at 1 x 110Vac kVA tbd tbd - at 1 x 240Vac kVA tbd tbd - at 3 x 110Vac kVA tbd tbd - at 3 x 240Vac kVA tbd tbd tbd tbd
at 3 x 400Vac kVA - - tbd tbd
at 3 x 480Vac kVA - - tbd tbd
Emissions (low/high speed fan)
Noise emission dB(A) tbd tbd tbd tbd
Brake output
Voltage VDC 24 V (±10%)
Output current, minimum mA required 100 per brake (fault detection)
Output current, maximum A 2.5 per brake
38 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 39

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.6 LCD Display and Push-buttons (B1, B2)
The drive offers an LCD display andtwo push-buttons B1 / B2 for navigation.
Push-button actions
A short buttonpress invokes the action corresponding to the symbol directly above the button. On the dashboard for example,
a short press on B1 causes the menu system to appear, and
a short press on B2 causes a help screen to appear.
A long press (greaterthan2 seconds) on B2 returns the display to the previous screen.
More B1 / B2 Functions Description
Boot from SD card Push both buttons duringpower up to boot with data from SD
card. Press the buttons first, then hold it down while turning on
the 24 V power supply.
Boot from flash fallback
image
Remove the SD card, then press both buttons and hold them
down while turning on the 24 V powersupply to boot from an onboardrecovery image. Thefallback imageincludes a set of bootloader, operational, andcontrol FPGA that implements sufficient programming support to update missing or corrupt files.
LCD display
Left Coloredsection
Color: axis status (enabled, disabled, or faulted).
First icon: axis commandsource (analog, service, electronic gearing, or fieldbus).
Secondicon: axis operationmode (torque, velocity, or position).
Axis ID: A1 or A2.
Right Non-coloredsection:
No Fault/Warning: three virtual LEDs correspondingto axis disable sources
(Safe Torque Off, HardwareEnable, andControlledStop).
Faults or warnings: fault or warningcode.
Centerblue bar:
Drive and axis names
IP address
Drive model number
Firmware version
Bottom blue bar:
indicates whetherthe service port is connected to WorkBench, and
shows the actions that will be invoked by pushing the B1 / B2 buttons.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 39
Page 40

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
Dual axes LCD display
Fordual-axis drives, the top section shows axis 1 information, the bottom section those for
axis 2.
Single axis LCD display
Forsingleaxis drives, the top section shows axis 1 information while the section betweenthe
centerand bottom bars is a data area wheresome important actual values of the axis arevisible: position, velocity, current.
40 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 41

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
Faults and Warnings
The display shows the code of the fault or warning that occurred. If a fault occurs, the color of
the left section switches to red. Navigate with B1 / B2 to the Fault screen to see a short
description of the fault or warning.
See WorkBench Onlinehelp for more details.
6.7 SD Card Slot
Supported SD card types
SD cards are formatted by the manufacturer. The following table outlines the SD card types
andAKD2G support.
SD Type File System Capacity Supported
SD (SDSC) FAT16 1MB to 2GB YES
SDHC FAT32 4GB to 32GB YES
SDXC exFAT (Microsoft) >32GB to 2TB NO
AKD2G offer a SD card slot for
to boot the drive with data from the SD Memory
card
These features can be started from the drive display
using push-buttons B1/B2.
Features
Boot AKD2G with data from SD card:
Remove 24V. Apply 24V with both buttons pressed. Release buttons after the display is
updated.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 41
Page 42

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.8 Electrical Motor Braking
6.8.1 Dynamic Braking
Dynamic braking is a methodto slow down a servo system by dissipating the mechanical
energy driven by the motor back EMF.
Dynamic braking is not functional safe..
The AKD2G has a built in advanceddynamic braking mode which operates fully in hardware.
When activated, the drive shorts the motor terminals. This forces all of the dynamic braking
current to be stopping current and insures the fastest stoppingper ampere of motor terminal
current.
When current is not beinglimited, the mechanical energy is being dissipatedin the motor
resistance.
When current is being limited, energy is returned to the drive bus capacitors.
The drive also limits the maximum dynamic brakingmotor terminal current via the
AXIS#.DBILIMIT parameter to insure that the drive, motor, andcustomerload do not see
excessive currents/forces.
Whether and how the AKD2G uses dynamic brakingdepends on (AXIS#.DISMODE).
6.8.2 Rheostatic energy dissipation
When the amount of motorback EMF builds the bus capacitor voltageup enough the drive
activates the rheostatic regenerative circuit to start dumping the returned energy in the regen
resistor (also called regenerative resistor or brake resistor). All AKD2G offer internal resistor
plus the ability to connect an external resistor dependingon the application requirements.
External regenresistors aredescribed in the regional Accessories Manual.
6.8.2.1 Functional description
1. Individual drives, not coupled through the DC bus link circuit (+DC, -DC)
When the energy fed back from the motor has an averageor peak power that exceeds the preset level for the brake powerrating, the drive generates the warning "W2010 Regen Energy
Critical”. If the power exceeds the set fault level, the regenerative circuit will switch off.
2. Several drives coupled through the DC bus link (+DC, -DC)
Using the built-in regenerative circuit, several drives of the same series can be operatedfrom
a common DC-bus link (➜ # 75), without any additional measures. 90% of the combined
powerof all the coupled drives is always available for peak and continuous power. If the
powerof the drive with the lowest switch-off threshold (resulting from tolerances) exceeds
the set fault level, the regenerative circuit will switch off.
Switch-off on over voltage: With the regenerative circuit switched off, the DC bus link
voltage is not dissipated and thereforethe level increases. The drive reports an over-voltage
fault if the DC bus thresholdis exceeded. The drive power stage is disabledand the load
coasts to a stop with the fault message “F2006Bus Over voltage". The ready to operate contact (terminals X21/B5-B6) is opened(➜ # 110).
Observe the regeneration time (someminutes) after full loadwith peak brake power.
42 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 43

6.8.2.2 Technical data for AKD2G-Sxx-6V
Technical data for the regenerative circuit depends on the drive type and the mains voltage.
Supply voltages, capacitance, and switch-on voltages are all nominal values.
Brake circuit AC Supply
AKD2G-Sxx- Rated data Units 120V / 240V
6Vxxy
all types
Switch-on threshold of regenerative circuit V 380
Overvoltage limit V 420
Maximum regenerative duty cycle % 15*
AKD2G-Sxx- Rated data Units 120V / 240V
6V03S Internal regen resistor Ω 15
Continuous power, internal resistor W tbd
Peak brake power, internal resistor (0.5s) kW tbd
External regenresistor Ω 33
Continuous brake power, external resistor kW tbd
Peak brake power, external (1s) kW tbd
Absorption energy in capacitors (+/- 20%) Ws tbd / tbd
DC Bus Capacitance µF tbd
6V06S,
6V03D
Internal regen resistor Ω 15
Continuous power, internal resistor W tbd
Peak brake power, internal resistor (0.5s) kW tbd
External regenresistor Ω 33
Continuous brake power, external resistor kW tbd
Peak brake power, external resistor (1s) kW tbd
Absorption energy in capacitors (+/- 20%) Ws tbd / tbd
DC Bus Capacitance µF tbd
6V12S,
6V06D
Internal regen resistor Ω 15
Continuous power, internal resistor W tbd
Peak brake power, internal resistor (0.5s) kW tbd
External regenresistor Ω 33
Continuous brake power, external resistor kW tbd
Peak brake power, external resistor (1s) kW tbd
Absorption energy in capacitors (+/- 20%) Ws tbd / tbd
DC Bus Capacitance µF tbd
AKD2G-S Installation, Safety 1 | 6 Technical description anddata
* depends on connected regen resistor power.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 43
Page 44

AKD2G-S Installation, Safety 1 | 6 Technical description anddata
6.8.2.3 Technical data for AKD2G-Sxx-7V
Technical data for the regenerative circuit depends on the drive type and the mains voltage.
Supply voltages, capacitance, and switch-on voltages are all nominal values.
Brake circuit AC Supply
AKD2G-Sxx- Rated data Units 240V 400V/480V
7Vxxy
all types
Switch-on threshold of regenerative circuit V 380 760
Overvoltage limit V 420 840
Maximum regenerative duty cycle % 15*
AKD2G-Sxx- Rated data Units 240V 400V/480V
7V03S Internal regen resistor Ω 33
Continuous power, internal resistor W tbd
Peak brake power, internal resistor (0.5s) kW tbd tbd
External regenresistor Ω 33
Continuous brake power, external resistor kW tbd tbd
Peak brake power, external (1s) kW tbd tbd
Absorption energy in capacitors (+/- 20%) Ws tbd tbd / tbd
DC Bus Capacitance µF tbd
7V06S,
7V03D
Internal regen resistor Ω 33
Continuous power, internal resistor W tbd
Peak brake power, internal resistor (0.5s) kW tbd tbd
External regenresistor Ω 33
Continuous brake power, external resistor kW tbd tbd
Peak brake power, external resistor (1s) kW tbd tbd
Absorption energy in capacitors (+/- 20%) Ws tbd tbd / tbd
DC Bus Capacitance µF tbd
7V12S,
7V06D
Internal regen resistor Ω 33
Continuous power, internal resistor W tbd
Peak brake power, internal resistor (0.5s) kW tbd tbd
External regenresistor Ω 33
Continuous brake power, external resistor kW tbd tbd
Peak brake power, external resistor (1s) kW tbd tbd
Absorption energy in capacitors (+/- 20%) Ws tbd tbd / tbd
DC Bus Capacitance µF tbd
* depends on connected regen resistor power.
44 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 45

AKD2G-S Installation, Safety 1 | 7 Mechanical Installation
7 Mechanical Installation
7.1 Important Notes 46
7.2 Guide to Mechanical Installation 46
7.3 Dimensions 47
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 45
Page 46

AKD2G-S Installation, Safety 1 | 7 Mechanical Installation
7.1 Important Notes
High EMC Voltage Level!
Risk of electrical shock, if the servo amplifier(or the motor)is not properly EMC-grounded.
Do not use painted (i.e. non-conductive) mountingplates.
In unfavourable circumstances, use copper mesh tape betweenthe earthingbolts and
earth potential to deflect currents.
Protect the drive from impermissible stresses. In particular, do not let any components
become bent or any insulationdistances altered duringtransport and handling. Avoid contact with electronic components andcontacts.
The drive will switch itself off in case of overheating. Ensure that there is an adequate flow
of cool, filtered air into the bottom of the control cabinet, or use a heat exchanger(➜ # 33).
Do not mount devices that produce magnetic fields directly besidethe drive. Strongmagnetic fields can directly affect internal components. Install devices which produce magnetic
field with distance to the drives and/or shield the magnetic fields.
7.2 Guide to Mechanical Installation
The followingtools arerequired(at a minimum)to install the AKD2G; your specific installation may requireadditional tools:
M5 hexagon socket-cap screws (ISO 4762)
4 mm T-handle Allen key
No. 2 Phillips head screwdriver
Small slotted screwdriver
Install the drive unit as follows:
1. Prepare the site.
Mount the drive in a closed control cabinet (ambient conditions (➜ # 33)). The site must
be freefrom conductive or corrosive materials. For the mounting position in the cabinet
(➜ # 47).
2. Check ventilation.
Check that the ventilation of the drive is unimpeded, and keepwithin the permitted ambient temperature (ambient conditions (➜ # 33)). Keep the required space clearance above
andbelow the drive (➜ # 47).
3. Check the cooling system.
If cooling systems are used for the control cabinet, position the coolingsystem so that
condensationwater cannot drip onto the drive orperipheral devices.
4. Mount the drive.
Assemble the drive andpower supply near each otheron the conductive, groundedmounting plate in the cabinet.
5. Ground the drive.
ForEMC-compliant shieldingand grounding, (➜ # 55). Ground the mounting plate, motor
housing andCNC-GND of the control system.
46 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 47

7.3 Dimensions
AKD2G-S Installation, Safety 1 | 7 Mechanical Installation
Mounting material: three M5 hexagonsocket screws to ISO 4762, 4 mm T-handle Allen key
Outlinewidth and height dimensions are measuredon footprint level (mounting plate).
Dimensions on the front plate areslightly smaller. All dimensions in mm.
Dimensions in mm A A1 B B1 C D E F G H M P
AKD2G-Sxx-6V (3 to 12 A) 221 232 235 303 76 221,5 36 5,8 11,5 7 78 40
AKD2G-Sxx-7V (3 to 12 A) 221 232 272 340 75 259 36 5,8 11,5 6 77 39
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 47
Page 48

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8 Electrical Installation
8.1 Important Notes 49
8.2 Guide to electrical installation 50
8.3 Wiring 51
8.4 EMI Noise Reduction 55
8.5 Connection Overview 60
8.6 Power and Logic Voltage Supply (X3/X10) 70
8.7 DC Bus link (X3) 75
8.8 External Regen resistor (X3) 76
8.9 Motor Power, Brake and Feedback connection 77
8.10 Electronic Gearing, EEO, Master-Slave 90
8.11 Motion Bus Interface (X11/X12) 94
8.12 CAN-Bus Interface (X13/X14) 95
8.13 Service Interface (X20) 98
8.14 I/O Connection (X21/X22/X23) 99
48 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 49

8.1 Important Notes
Only professional staff who arequalified in electrical engineering are allowed to install the
drive. Wires with colorgreen with one ormore yellow stripes must not be used other than for
protective earth (PE) wiring.
There is a dangerof serious personal injury or death by electrical shock or electrical arcing.
Capacitors can still have dangerous voltages present up to 5 minutes after switchingoff the
supply power. Control and powerconnections can still be live, even if the motoris not rotating.
Only install andwire the equipment whenit is not live.
Make sure that the cabinet is safely disconnected (for instance, with a lock-out andwarning signs).
Never remove electrical connections to the drive while it is live.
Wait at least 5 minutes after disconnecting the drive from the main supply power before
touching potentially live sections of the equipment (e.g. contacts) or undoing any connections.
To be sure, measure the voltage in the DC bus link andwait until it has fallen below 50 V.
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
High Voltage up to 900 V!
Wrongmains voltage, unsuitable motororwrong wiring will damage the drive. Check the
combination of drive and motor. Comparethe rated voltage and current of the units. Implement the wiring according to the matchingconnection diagram, see (➜ # 62)and following.
Make sure that the maximum permissible rated voltage at the terminals L1, L2, L3 or +DC, –
DC is not exceededby morethan10% even in the most unfavorable circumstances (see
IEC 60204-1).
Excessively highexternal fusing will endanger cables anddevices. The fusing of the mains
powerand logic power must be installedby the user. Hints for use of Residual-current circuit
breakers (RCD) (➜ # 17).
Since the leakagecurrent to PE is more than3.5 mA, in compliance with IEC61800-5-1the
PE connection must eitherbe doubled or a connecting cable with a cross-section >10 mm²
must be used. Deviating measures according to regional standards might be possible.
The drive status shall be monitored by the PLC to acknowledgecritical situations. We
recommend wiring the ready to operate relay contact in series into the emergency off circuit
of the installation. The emergency off circuit must operate the supply contactor.
It is permissible to use the setup software to alter the settings of the drive. Any other alterations will invalidate the warranty.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 49
Page 50

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.2 Guide to electrical installation
Kollmorgen recommends to install the drive electrical system as follows:
1. Select cables in accordance with IEC 60204 (➜ # 52).
2. Install shieldingand groundthe drive.
ForEMC-compliant shieldingand grounding, see (➜ # 55).
Ground the mounting plate, motor housing andCNC-GND of the control system.
3. For functional safety information, see (➜ # 123).
4. Wire the drive and connectors.
Observe the "Recommendations for EMI noise reduction": (➜ # 55).
Wire the "Ready to Operate" contact into the emergency off circuit of the system.
Connect the digital control inputs andoutputs.
Connect up analogground (also if a fieldbus is used).
Connect the analog input source, if required.
Connect the motor (hybrid cable orpower, brake and feedback cables).
Connect shielding at both ends.
If required, connect the external regenresistor (with fusing).
AKD2G-Sxx-6V: connect EMC filters (shielded lines between filter and drive) for
secondenvironment requirements to product category C2.
Connect the auxiliary voltage supply
Connect the main electrical supply.
Check maximum permitted voltage value(➜ # 35).
Check proper use of residual-current circuit breakers (RCD): (➜ # 17).
Connect the PC (➜ # 98) for setting upthe drive.
5. Check the wiringagainst the wiringdiagrams:
Overview AKD2G singleaxis (➜ # 62)
Overview AKD2G dual-axis (➜ # 63)
Connector pinout (➜ # 64) ff
Mains powersupply: (➜ # 73) ff
Logic power supply: (➜ # 75)
DC Bus Link: (➜ # 75)
External Regen Resistor: (➜ # 76)
Motorsinglecableconnection: (➜ # 78)
Motordual cable connection: (➜ # 80)
Electronic gearing: (➜ # 90)
- Encoder emulation: (➜ # 91)
- Master Slave: (➜ # 93)
Motionbus interface: (➜ # 94)
CAN-Bus interface: (➜ # 95)
Service interface: (➜ # 98)
Digital and analog I/O: (➜ # 99)
Functional Safety option1: (➜ # 127)
50 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 51

8.3 Wiring
8.3.1 General
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Only professional staff who arequalified in electrical engineering are allowed to install the
drive. Wires with colorgreen with one ormore yellow stripes must not be used other than for
protective earth (PE) wiring. Wheninstallingorreplacingcables, use only standardized components, which complies to the cable andwire requirements (➜ # 52).
High Voltage up to 900 V!
There is a dangerof serious personal injury or death by electrical shock or electrical arcing.
Only install andwire the equipment whenit is not live, that is, when neither the electrical
supply northe 24 V auxiliary voltage northe supply voltages of any otherconnected
equipment is switchedon.
Make sure that the cabinet is safely disconnected (for instance, with a lock-out andwarning signs). The individual voltages are switchedonfor the first time duringsetup.
The chassis ground symbol, which is used in all the wiringdiagrams, indicates that you
must take care to provide anelectrically conductive connection with the largest feasible surface areabetween the unit indicated andthe mounting plate in the control cabinet. This connection is for the effective grounding of HF interference, andmust not be confused with the
PE-symbol (PE = protective earth, safety measureas per IEC 60204).
8.3.2 Mating connectors
l Connectors X1, X2, X21, X22 arespring clamp connectors.
l X3 andX10are connectors with screw terminals.
l Connectors X22 and X23 are optional.
# Description Type Max. Cross
X1/2
X3
X10 24V power supply Connector, 2 poles,
X11/12 Motion Bus RJ45 0,5 mm², 21 awg n/a
X13/14 CAN In/Out RJ11 0,5 mm², 21 awg n/a
X20 Service Port RJ45 0,5 mm², 21 awg n/a
X21 I/O control signals Connector, 2x11 poles 1.5 mm², 16 awg n/a
X22 I/O control signals Connector, 2x10 poles 1.5 mm², 16 awg n/a
X23 Conventional feed-
Motor, two wire feedback, holdingbrake
Mains power, regen
resistor, DC-Bus
back models
Tightening
Section
Connector, 4 poles power 10mm², 8 awg
Connector, 4 poles signal 0.5 mm², 21 awg
Connector, 8 poles,
screw terminals
6 mm², 10 awg 0.55
Torque/Nm
0.55
2.5 mm², 14 awg 0.2 to 0.25
screw terminals
SubD 15pinHD (female) 0,5 mm², 21 awg 0.4
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 51
Page 52

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.3.3 Cable and Wire Requirements
8.3.3.1 Cable material
Forinformationon the chemical, mechanical, andelectrical characteristics of the cables
please refer to the accessories manual or contact customersupport.
To reach the maximum permitted cable length, you must use cablematerial with the following capacitance requirements:
Motorpower cable: less than 150pF/m (phase core to shieldcapacitance)
MotorFeedback cable: less than 120 pF/m (signal core to shieldcapacitance)
Hybrid motor cable:
- less than 120pF/m (phase core/core capacitance)
- less than 210pF/m (phase core/shieldcapacitance)
- less than 120pF/m (signal core/core capacitance)
- less than 210pF/m (signal core/shield capacitance)
- BUS Element: 45 pF/m @ 800kHz & a charact. wave resistance of 110±10Ω @ 10MHz
Cables shouldnot exceedthe maximum lengths stated in the tables below. The recommendedmaximum cablelength of motor cables depends on the used cable meterial andthe
feedback type.
Cable functionality is only guaranteed up to the maximum length when using unmodified Kollmorgenengineered cables.
AKM2G AKM1G
Performance Line Cables Performance Line Cables Value Line Cables
Feedback Max. Length [m] Feedback Max. Length [m] Feedback Max. Length [m]
SFD3 50
DSL 25
Endat 2.2 25
Resolver 50
All 25 All 12
52 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 53

8.3.3.2 Cable cross sections and requirements
The tables below describe the recommended interface cross sections andcablerequirements relatedto AKD2G in accordance with IEC 60204.
Formulti-axes systems, observe the specific operating conditions for yoursystem.
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Power Cables
Mains supply
1x3 A:
2x3 A:
1x6 A:
2x6 A:
1x12 A:
2x12 A:
Cross Section
EU US
1.5 mm²
1.5 mm²
1.5 mm²
2.5 mm²
2.5 mm²
6 mm²
14 awg
14 awg
14 awg
14 awg
14 awg
10 awg
Remarks
600V rated ,minimum 75°C
24 V supply max. 2.5 mm² 14 awg single core
DC bus link,
Regenresistor
3/6 A:
12 A:
1.5 mm²
2.5 mm²
14 awg
14 awg
1000 V rated, min. 75°C,
shielded for lengths >0.20 m
I/O cables
Analog I/Os min. 0.25mm² 24 awg shieldedtwisted pairs
Digital I/Os 0.5 mm² 20 awg single core
Motor Power Cable (power) & Motor Combination Cable (power & brake)
Cross Section [mm]
Cable Combi Cable
(4x1) (4x1.0+(2x0.75)) 0A < I0rms ≤ 10.1A
(4x1.5) (4x1.5+(2x0.75)) 10.1A < I0rms ≤ 13.1A
(4x2.5) (4x2.5+(2x1.0)) 13.1A < I0rms ≤ 17.4A
(4x4) (4x4.0+(2x1.0)) 17.4A < I0rms ≤ 23A
(4x6) (4x6.0+(2x1.0)) 23A < I0rms ≤ 30A
Current Carrying
Capacity
Remarks
1000 V Rated, 80°C
Current carryingcapacity
acc. to IEC 60204-1:2006
Table 6, Column B2
The brackets (...) show
the shielding.
Motor Feedback Cable
Type Cross Section [mm] Remarks
Resolver (4x2x0.25)
EnDat 2.1, BiSS B (6x2x0.25)
HIPERFACE (5x2x0.25)
EnDat 2.2, BiSS C (5x2x0.25)
SFD (3x2x0.25)
300V rated, 80°C
Shielded twisted pairs
The brackets (...) show
the shielding.
Comcoder (8x2x0.25)
Motor Hybrid Cable
Type Cross Section [mm]
Current Carrying
Capacity
SFD3/DSL (4x1.0+(2x0.34)+(2x0.75)) 0A < I0rms ≤ 10.1A
SFD3/DSL (4x1.5+(2x0.34)+(2x0.75)) 10.1A < I0rms ≤ 13.1A
SFD3/DSL (4x2.5+(2x0.34)+(2x1.0)) 13.1A < I0rms ≤ 17.4A
SFD3/DSL (4x4.0+(2x0.34)+(2x1.0)) 17.4A < I0rms ≤ 23A
SFD3/DSL (4x6.0+(2x0.34)+(2x1.0)) 23A < I0rms ≤ 30A
Endat 2.2
Endat 2.2
(4x1.5+(2x0.75)+
(2x2x0.14+2x0.25))
(4x4.0+(2x1.0)+
(2x2x0.14+2x0.25))
10.1A < I0rms ≤ 13.1A
17.4A < I0rms ≤ 23A
Remarks
1000 V rated, 80°C
Current carryingcapacity
acc. to IEC 60204-1:2006
Table 6, Column B2
4 powerlines &
2 brake lines &
2 SFD3/DSL signal lines
or
6 EnDat 2.2 signal lines
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 53
Page 54

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.3.4 Protective Earth connection
Protective Earth connection of the system components is a safety measureper IEC 60204.
Ensurethe proper groundingof all components with the PE rail in the control cabinet as reference potential. Connect each groundindividually with the intended groundingcable(neutral
point connection).
The leakage current from AKD2G against PE is more than3.5 mA. In accordance with EN
61800-5-1, the PE connectionmust therefore either be double implemented or a connection
cable with >10mm² cross-section used.
In order to keepthe impedance as low as possible, we recommenda copper earthingstrap for
the PE connection on the PE block.
Wire the PE connections immediately after installingthe devices as the first electrical connection. Now you insert all the otherlines andconnectors. For disassembly, release the PE
connections as the last connection.
Forthe use of residual current protective devices (RCD), refer to (➜ # 17).
54 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 55

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.4 EMI Noise Reduction
Electromagnetic Fields!
Electromagnetic radiation may, by acting on electrically conductive materials, leadto potential hazardous danger(warming, failure of implants).
Work on the electrical installationmay only be performed by trained andqualified personnel, in compliance with the regulations for safety at work, andonly with switched off
mains supply, and securedagainst restart.
Grounding, equipotential bonding andradiation-reducingshields may not be removed.
8.4.1 Recommendations for EMI noise reduction
The followingguidelines will help you to reduce problems with electrical noise in your application.
Ensure good connections between the cabinet components. Connect the back
panel andcabinet doorto the cabinet body using several conductive braids. Never rely on
hinges or mounting bolts for ground connections.
Ensure good ground connection. Connect from cabinet to proper earth ground. Ground
leads should be the same gauge as the leads to main power, but must cover the regional
legal requirements, example (➜ # 54).
Use Kollmorgen cables. Route power and control cables separately, Kollmorgen recommends a distance of at least 200mm to improve interference immunity.
Ground the shielding at both ends. Groundall shielding with largeareas (low impedance), with metalized connector housings or shield connection clamps whereverpossible. For cables entering a cabinet, connect shields on all 360° of the cable. Never
connect a simple “pigtail.” Formore information onshielding concepts, (➜ # 56).
With separate mains filter, maintain separation of leads entering and exiting the
mains filter (line power filter). Locate the filter as close as possible to the point where
the incomingpower enters the cabinet. If it is necessary for input power andmotorleads
to cross, cross them at 90°.
Feedback lines and Hybrid Cables may not be extended, since the shielding
would be interrupted and the signal processing may be disturbed.Install all feed-
back cables with an adequate cross-section, per IEC 60204 (➜ # 52)and use the requested cable material to reach maximum cable length.
Splice cables properly. If you need to divide cables, use connectors with metal backshells. Ensurethat both shells connect along the full 360° of the shields.
Use differential inputs for analog signals. Noise susceptibility in analog signals is
greatly reduced by using differential inputs. Use twisted-pair, shieldedsignal lines, connecting shields on both ends.
Cables between drives and filters or external regen resistors must be shielded.
Install all power cables with an adequate cross-section per IEC 60204 (➜ # 52)and use
the requested cablematerial to reach maximum cable length.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 55
Page 56

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.4.2 Shielding with external shielding busbar
Forbest practice use of shielded cables Kollmorgen recommends a star point shield connection, for example, with a shielding busbar.
8.4.2.1 Shielding Concept
Example with AKD2G-Sxx--6Vxx, EMC filter and external regen resistor.
56 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 57

8.4.2.2 Shielding Busbar
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
The power cable shields (line in, motor cable, external regen resistor) can
be routed to an additional busbar via shieldclamps.
Kollmorgen recommends using Weidmüller KLBÜ shield clamps.
A possible scenario for setting up a busbar for the above shieldclamps is
described below.
1. Cut a busbar of the required
length from a brass rail (cross-section 10 x 3 mm) and drill holes in it
as indicated. All shield clamps
required must fit between the drill
holes.
Risk of injury due to the spring
force of the coil spring.
Use pincers.
2. Squeeze togetherthe coil spring
andthe supportingplate and push
the busbar throughthe opening in
the holder.
3. Mount the busbarwith the
shield clamps fitted on the
assembly plate. Use either metal
spacerbushes or screws with
nuts and accessories to maintain
a spacing of 50 mm. Earth the busbarusing a single conductor with a
cross-section of at least 2.5 mm².
4. Strip the external cable sheath
to a length of approx. 30 mm, taking carenot to damage the braided
shield. Push the shieldclamp up
androute the cable to it via the busbar.
Make sure there is goodcontact
between the shield clamp and the
braided shield.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 57
Page 58

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.4.3 Shielding connection to the drive
You can connect cable shielding directly to the drive by using grounding plates, shield connection clamps, and a motor connector with strain relief andgrounding plate.
8.4.3.1 Shielding Concept
Example with AKD2G-Sxx--7Vxx, dual-axis.
58 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 59

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.4.3.2 Grounding plates and shield connection clamps
A grounding plate is mounted to the drive.
Use shield connection clamps (see accessories manual). These hook into the
grounding plate andensureoptimum contact betweenthe shield and the grounding plate.
Kollmorgen recommends using Phoenix Contact SK14 shield clamps with cable
clamp range of 6-13mm.
8.4.3.3 Motor connector X1/X2 with shielding connection
Alternative connection for the motor powerconnection by mating connector with shieldplate
andstrain relief. Kollmorgen motor powerand hybridmotor cables are configured with shield
plate.
Strip the external cablesheath to a length of
approx. 80 mm, taking care not to damage the
braided shield. Push the braided shield (1)back
over the cable and secure with a rubbersleeve (2)
or shrink sleeve.
Shorten all the wires apart from the protective earth
(PE) wire (green/yellow) by about 20 mm so that
the PE wire is now the longest wire. Strip all wires
andfit wire end ferrules.
Securethe braided shield of the cable with metal
cable ties (3) and fasten the cable.
Wire the connectoras shown in the connection diagram. Plug in the connector to the socket on the
front of the AKD2G and secureit with the red clip.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 59
Page 60

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.5 Connection Overview
8.5.1 Connector Position AKD2G-Sxx-6V
The graphics shows an AKD2G with supply voltage110 V to 240 V.
X2 is availablewith dual-axis drives only.
Optional: I/O, F3 or DX (➜ # 29).
60 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 61

8.5.2 Connector Position AKD2G-Sxx-7V
The graphics shows an AKD2G with supply voltage240 V to 480 V.
X2 is availablewith dual-axis drives only.
Optional: I/O, F3 or DX (➜ # 29).
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 61
Page 62

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.5.3 Wiring overview, single axis drive
62 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 63

8.5.4 Wiring overview, dual axis drive
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 63
Page 64

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.5.5 Connector pin assignments
8.5.5.1 X1 and X2: Motor, Brake, Feedback 1
4 pin, pitch 7.62 mm plus 2x2 pin pitch 3.81 mm
Spring clamps
Motorpower, Motor brake
X1: Input for feedback 1 (➜ # 84)
X2: Input for feedback 2 (➜ # 84)
Wiring example:
DC Bus link (➜ # 75)
Motorsinglecableconnection (➜ # 78)
Motordual cable connection (➜ # 80)
Pin Signal Description
1 U Motor phase U
2 V Motor phase V
3 W Motor phase W
retention latch,shield screw
5 PE Protective earth
B+ BR+ Motor holdingbrake +
B- BR- Motor holdingbrake -
F+ COM+ SFD3 + or HIPERFACE DSL +
F- COM- SFD3 - or HIPERFACE DSL -
8.5.5.2 X3: Mains, regen resistor, DC-Bus
Pin Signal Description
1 PE Protective earth
2 L1 3~ mains supply L1, 1~ supply L, DC supply +
3 L2 3~ mains supply L2
4 L3 3~ mains supply L3, 1~ supply N, DC supply 5 RBint internal regenresistor
6 -RB external regen resistor 7 +DC (+RBext) DC Bus link+ and/orexternal regen resistor +
8 -DC DC Bus link -
8 pin, pitch 7.62 mm
Screw terminals
Optional T version(in process)
Mains supply, External regen resistor, DC Bus
Wiring example:
Power supply (➜ # 70)
DC Bus link (➜ # 75)
External regenresistor (➜ # 76)
64 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 65

8.5.5.3 X10: 24 VDC
Pin Signal Description
1 + 24 V +24 VDC supply voltage, PELV
2 GND Ground for 24 VDC supply voltage, PELV
8.5.5.4 X11, X12: Motion Bus
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
2 pin, pitch 5.08 mm
Screw terminals
24 VDC supply voltage
Wiring example:
Logic power supply (➜ # 75)
RJ45 with built-in greenand yellow LEDs
X12 IN port, X11 OUT port
EtherCAT, EthernetI/P
Interface Details: (➜ # 94)
Pin Signal Description Pin Signal Description
1 Tx+ Transmit + 5 Term. Termination
2 Tx- Transmit - 6 Rx- Receive 3 Rx+ Receive + 7 Term. Termination
4 Term. Termination 8 Term. Ttermination
8.5.5.5 X13, X14: CAN bus (optional)
Pin Signal Description Pin Signal Description
1 n.c. not used 4 CAN_low CAN bus low signal
2 Shield Chassis 5 CAN_GND CAN bus ground
3 CAN_high CAN bus highsignal 6 n.c. not used
8.5.5.6 X20: Service
RJ-11
X14 IN port, X13 OUT port
Up to 1 Mbit operation
Node ID to be set by WorkBench
Interface Details: (➜ # 95)
RJ45 with built-in greenand yellow LEDs
100/10 Mbit Ethernet TCP/IP
Supports auto-IP, DHCP and fixed IP addressing
Supports point-to-point (i.e. Auto-IP) and connection via network switches
Supports automatic discovery in WorkBench if in the same
sub-net.
Interface Details: (➜ # 98)
Pin Signal Description Pin Signal Description
1 Tx+ Transmit + 5 Term. Termination
2 Tx- Transmit - 6 Rx- Receive 3 Rx+ Receive + 7 Term. Termination
4 Term. Termination 8 Term. Termination
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 65
Page 66

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.5.5.7 X21: I/O, Feedback 4
2 x 11 pins (left column A, right columnB), pitch 3.5 mm
Spring clamps
Analog anddigital I/O
Input for feedback 4 (➜ # 84)
Wiring examples:
Analog input (➜ # 101)
Analog output (➜ # 102)
Digital input (➜ # 103)
Digital Output (➜ # 107)
Feedback (➜ # 86)
Digital I/O connectivity
Pin Signal Description
A1 Analog-In (AIN) 1 +
A2 Analog-In (AIN) 1 -
Analog Input +/- 10 V
A3* Digital-In (DIN) 1 Fast, isolated, sink, type EN 61131-2 type 1
A4* Digital-In (DIN) 2 Fast, isolated, sink, type EN 61131-2 type 1
A5 Digital-In (DIN) 3 Slow, isolated, sink, type EN 61131-2type 1
A6 Digital-In (DIN) 4 Slow, isolated, sink, type EN 61131-2type 1
A7 Digital-In (DIN) 5 Slow, isolated, sink, type EN 61131-2type 1
A8 Digital-In (DIN) 6 Slow, isolated, sink, type EN 61131-2type 1
A9 Digital-In (DIN) 7 Slow, isolated, sink, type EN 61131-2type 1
A10 Digital-In (DIN) 8 Slow, isolated, sink, type EN 61131-2type 1
A11 STO-A-A1 Slow, isolated, sink, fail-safe, STO axis 1 channel A
B1 Analog-Out (AOUT) 1 AnalogOutput, 0 to +10 V
B2 AGND Groundfor analogI/O
B3 +24 V +24 VDC for digital I/O andSTO
B4 DGND Ground for digital I/O andSTO
B5 Digital-Out (DOUT) 9 + Relay contact, normally open, 24 VDC, 1A
B6 Digital-Out (DOUT) 9 - Relay contact, normally open, 24 VDC, 1A
B7 Digital-Out (DOUT) 1 Isolated, high-side, 100mA
B8 Digital-Out (DOUT) 2 Isolated, high-side, 100mA
B9 Digital-Out (DOUT) 3 Isolated,high-side, 100mA
B10 Digital-Out (DOUT) 4 Isolated, high-side, 100mA
B11 STO-B-A1 Slow, isolated, sink, fail-safe, STO axis 1 channel B
*Feedback 4 connectivity, Step/Direction CW/CCW (input)
Pin Signal Description
A3 Step, CW Fast, isolated, sink, type EN 61131-2type 1
A4 Direction, CCW Fast, isolated, sink, type EN 61131-2type 1
66 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 67

8.5.5.8 X22: I/O extended, EEO2, Feedback 5
Digital I/O connectivity
Pin Signal Description
A12 STO-A-A2 Slow, isolated, sink, fail-safe, STO axis 2 channel A
A13 Digital-In (DIN) 9 Slow, isolated, sink, type EN 61131-2type 1
A14 Digital-In (DIN) 10 Slow, isolated, sink, type EN 61131-2 type 1
A15 Digital-In (DIN) 11 Slow, isolated, sink, type EN 61131-2 type 1
A16 Digital-In (DIN) 12 Slow, isolated, sink, type EN 61131-2 type 1
A17 AGND Ground for analog I/O
A18 Analog-In (AIN) 2+
A19 Analog-In (AIN) 2A20* Digital-In/Out (DIO) 1 + RS485 input or output
A21* Digital-In/Out (DIO) 1 - RS485 input or output
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
2 x 10 pins (left column A, right columnB), pitch 3.5 mm
Spring clamps
Analog anddigital I/O
Input for feedback 5 (➜ # 84)
Output for incremental encoder emulation (EEO2)
Wiring examples:
Analog input (➜ # 101)
Analog output (➜ # 102)
Digital input (➜ # 103)
Digital output (➜ # 107)
Feedback (➜ # 87)
Encoder emulation (EEO2) (➜ # 91)
Master-Slave (➜ # 93)
Analog Input, +/- 10 V
B12 STO-B-A2 Slow, isolated, sink, fail-safe, STO axis 2 channel B
B13 Digital-Out (DOUT) 5 Isolated, high-side, 100 mA
B14 Digital-Out (DOUT) 6 Isolated, high-side, 100 mA
B15 Digital-Out (DOUT) 7 +
B16 Digital-Out (DOUT) 7 -
B17 Digital-Out (DOUT) 8 +
B18 Digital-Out (DOUT) 8 -
Fast, isolated, sink or source, 100mA
Fast, isolated, sink or source, 100mA
B19 Analog-Out (AOUT) 2 Analog Output, 0 to +10 V
B20* Digital-In/Out (DIO) 2 + RS485 input or output
B21* Digital-In/Out (DIO) 2 - RS485 input or output
*Feedback 5 connectivity (input)
Pin Incremental
Step/Dir CW/CCW
Encoder
A20 Track A + Step + CW +
A21 Track A - Step - CW B20 Track B + Dir + CCW +
*EEO2 connectivity (output)
Pin Incremental Encoder
A20 A+
A21 A B20 B+
B21 B -
B21 Track B - Dir - CCW -
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 67
Page 68

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.5.5.9 X23: Feedback 3, EEO1, I/O
Sub-D highdensity 15 pin, female
Input for feedback 3 (➜ # 84)
Output for incremental encoder emulation (EEO1)
Additional Digital-In/Out
Wiring examples:
Feedback (➜ # 88)
Encoder emulation (EEO1) (➜ # 92)
Master-Slave (➜ # 93)
Digital input (➜ # 103)
Digital output (➜ # 107)
Feedback 3 connectivity (input)
Pin SFD Resolver
1 - - - - - - - - HallU - HallU HallU - - 2 - - CLK+ CLK+ CLK+ CLK+ - - HallV - HallV HallV - Stp+ CW+
3 - - CLK- CLK- CLK- CLK- - - HallW - HallW HallW - Stp- CW4 SEN+ - SEN+ SEN+ SEN+ SEN+
5 SEN- - SEN- SEN- SEN- SEN- SEN- SEN- SEN- SEN- - SEN- - 6 COM+ R1 Ref+ DAT+ DAT+ DAT+ DAT+ DAT+ Zero+ Zero+ Zero+ Zero+ - SD+ Dir+ CCW+
7 COM- R2 Ref- DAT- DAT- DAT- DAT- DAT- Zero- Zero- Zero- Zero- - SD- Dir- CCW8 - Thermal control (+)
9 - Thermal control (-)
10 +5 V - +5 V +5 V +5 V +5 V
11 0 V - 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V
12 - S1SIN+ A+ - A+ - SIN+ A+ A+ A+ A+ - - - 13 - S3SIN- A- - A- - SIN- A- A- A- A- - - - 14 - S2COS+ B+ - B+ - COS+ B+ B+ B+ B+ - - - 15 - S4COS- B- - B- - COS- B- B- B- B- - - - -
CLK = CLOCK, DAT = DATA, SEN = SENSE, Stp = Step
BiSSBBiSSCEnDAT
EEO1 connectivity (output)
Pin
Incremental
Encoder
6 Zero+
7 Zero11 0 V
12 A +
13 A14 B+
15 B-
EnDAT
2.1
2.2
Hiper-
face
▌
8 to 9
V
Digital I/O connectivity
Pin Digital I/0
2 Digital-In/Out 6 +
3 Digital-In/Out 6 6 Digital-In/Out 5 +
7 Digital-In/Out 5 10 +5 V
11 0 V
12 Digital-In/Out 3 +
13 Digital-In/Out 3 14 Digital-In/Out 4 +
15 Digital-In/Out 4 -
SEN+ SEN+ SEN+ SEN+ - SEN+ - -
Sine/
Sine/
Cos
Cos
+Hall
+5 V +5 V +5 V +5 V +5 V +5 V +5 V +5 V
Incr.
Enc.
Incr.
Enc.
+Hall
Hall
Smart
Abs
Step/
Dir
CW/
CCW
68 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 69

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.5.5.10 X41: SFA Feedback converter, EEO3/EEO4 (accessory)
Sub-D highdensity 15 pin, female
0.5 m cable, 3 flying leads for connection to X1, X2
When connected to X1: Input for feedback 1 (➜ # 84)
When connected to X2: Input for feedback 2 (➜ # 84)
Output for incremental encoder emulation (EEO3 / EEO4) (➜ # 92)
SFA Adapter converts conventional feedback signals to 2 wire feedback format
Wiring examples:
Feedback andEncoder emulation(➜ # 89)
Master-Slave (➜ # 93)
Feedback 1/2 connectivity (input)
X41 Pin SFD
1 - - - - - - - HallU - HallU HallU - - 2 - - CLK+ CLK+ CLK+ - - HallV - HallV HallV - Stp+ CW+
3 - - CLK- CLK- CLK- - - HallW - HallW HallW - Stp- CW4 SEN+ - SEN+ SEN+ SEN+
5 SEN- - SEN- SEN- SEN- SEN- SEN- SEN- SEN- - SEN- - 6 COM+ R1 Ref+ DAT+ DAT+ DAT+ DAT+ Zero+ Zero+ Zero+ Zero+ - SD+ Dir+ CCW+
7 COM- R2 Ref- DAT- DAT- DAT- DAT- Zero- Zero- Zero- Zero- - SD- Dir- CCW8 - Thermal control (+)
9 - Thermal control (-)
10 +5 V - +5 V +5 V +5 V 8 to 9 V +5 V +5 V +5 V +5 V +5 V +5 V +5 V +5 V
11 0 V - 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V
12 - S1SIN+ A+ A+ - SIN+ A+ A+ A+ A+ - - - 13 - S3SIN- A- A- - SIN- A- A- A- A- - - - 14 - S2COS+ B+ B+ - COS+ B+ B+ B+ B+ - - - 15 - S4COS- B- B- - COS- B- B- B- B- - - - -
CLK = CLOCK, DAT = DATA, SEN = SENSE, Stp = Step
Resol-
ver
BiSSBEnDAT
2.1
EnDAT
2.2
Hiper-
face
▌
Sine/
Sine/
Cos
Cos
SEN+ SEN+ SEN+ SEN+ - SEN+ - -
Incr. Enc.
+Hall
Incr. Enc.
+Hall
Hall
Smart
Abs
Step/
Dir
EEO3 / EEO4 connectivity (output)
X41 Pin
6 Zero+
7 Zero11 0 V
12 A +
13 A14 B+
15 B-
Incremental
Encoder
CW/
CCW
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 69
Page 70

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.6 Power and Logic Voltage Supply (X3/X10)
8.6.1 Mains power supply (X3)
Drives in the AKD2G series can be suppliedas follows:
AKD2G-Sxx-6V
1, 2 or 3 phase industrial AC supply networks: 120V or 240 V.
DC supply networks: on request.
AKD2G-Sxx-7V
3 phase industrial AC supply networks: 240 V, 400V or 480 V.
DC supply networks: on request.
Connection to other voltage types of AC supply networks is possible with an additional isolating transformer.
Periodic overvoltages between phases (L1, L2, L3) andthe housing of the drive must not
exceed1000 V peak.
In accordance with IEC 61800, voltagespikes (< 50 µs) betweenphases must not exceed
1000 V. Voltage spikes (<50µs) between a phase and the housing must not exceed 2000 V.
8 pin, pitch 7.62 mm
optional T version
Wiring example:
1 phase AC supply (➜ # 73)
2 phase AC supply (➜ # 73)
3 phase AC supply (➜ # 74)
DC supply (➜ # 74)
AKD2G-Sxx-6V requires external EMC filter for use in
industrial environment, product category C.
Matingconnector data see (➜ # 51).
Pin Signal Description
1 PE Protective earth
2 L1 3~ mains supply L1, 1~ supply L, DC supply +
3 L2 3~ mains supply L2
4 L3 3~ mains supply L3, 1~ supply N, DC supply -
70 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 71

8.6.1.1 Fusing
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Fuse types
UL fuses: Class J, 600 VAC 200 kA (SCCR rating), time-delay. The fuse must be UL and
CSA listed, UL recognizedis not sufficient. Alternate fuses and breakers to Class J must
have similar or better Ip andI2T performance per UL 508A SB4.2 at the necessary SCCR
rating.
CE fuses: types gS or gG, 400 V/500 V, time-delay
Fuse holders: Combined with the standardfuse blocks, finger safe fuse holders must be
used accordingto IEC 60529.
Automatic circuit breakers: in process, ask Kollmorgenfor details.
Groupinstallation: in process, ask Kollmorgen for details.
Fuse Ampere ratings below are the maximum allowable. Lower Ampere ratings may be used
as appropriate to the application but may cause nuisance trips.
AC supply, single drives, line fusing
F1, F2, F3: depends on sum current and cabinet requirements.
Filters for special EMC requirements only (➜ # 141).
FN1, FN2, FN3 recommended rating see table below
Drive
Model
FN1, FN2, FN3: max.
Ampere rating
Example class J
Cooper Bussmann
Example class J
Ferraz Shawmut
AKD2G-Sxx-6V03S 15 A (Time-Delay) LPJ15SP/DFJ15 AJT10/HSJ15
AKD2G-Sxx-6V06S
15 A (Time-Delay) LPJ15SP/DFJ15 AJT15/HSJ15
AKD2G-Sxx-6V03D
AKD2G-Sxx-6V12S
15 A (Time-Delay) LPJ15SP/DFJ15 AJT15/HSJ15
AKD2G-Sxx-6V06D
AKD2G-Sxx-7V03S 15 A (Time-Delay) LPJ15SP/DFJ15 AJT15/HSJ15
AKD2G-Sxx-7V06S
15 A (Time-Delay) LPJ15SP/DFJ15 AJT15/HSJ15
AKD2G-Sxx-7V03D
AKD2G-Sxx-7V12S
15 A (Time-Delay) LPJ15SP/DFJ15 AJT15/HSJ15
AKD2G-Sxx-7V06D
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 71
Page 72

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
AC supply, group of drives, line fusing
Ask Kollmorgen for details.
AC supply, single drives, automatic circuit breakers
Ask Kollmorgen for details.
AC supply, group of drives, automatic circuit brakers
Ask Kollmorgen for details.
DC supply, single drives, line fusing
Ask Kollmorgen for details.
72 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 73

8.6.1.2 Wiring examples mains power supply
One phase AC mains (AKD2G-Sxx-6V)
Directly to onephase supply network (120V
Deactivate phase loss detection.
Filtering to be providedby the user.
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
-10%
to 240 V
+10%
) with neutral line
Two phases AC mains (AKD2G-Sxx-6V)
Directly to two-phase supply network (120V
Deactivate phase loss detection.
Filtering to be providedby the user.
-10%
to 240 V
+10%
) without neutral line
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 73
Page 74

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Three phases AC mains (all AKD2G-Sxx-)
Directly to 3-phase supply network (max. 240V
Filtering for AKD2G-Sxx-6V to be provided by the user.
+10%
respectively 480 V
+10%
)
DC Supply (all AKD2G-Sxx-)
Ask Kollmorgen for details.
74 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 75

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.6.2 Auxiliary voltage power supply 24 VDC (X10)
The followingdiagram describes external 24 VDC power supply (PELV). The required supply
current ratingdepends on the use of motor brake (➜ # 35) or(➜ # 37).
2 pin, pitch 5.08 mm
Matingconnector data see (➜ # 51).
Undervoltagefault limit 19 V
Overvoltage fault limit 30 V
Pin Signal Description
1 + 24 V +24 VDC supply voltage, PELV
2 GND Ground for 24 VDC supply voltage, PELV
8.6.2.1 Fusing
Use 24 VDC supply manufacturers recommendationfor fusing.
24 V supply (PELV) Units Input data
Aux. voltage supply (PELV) VDC 24 V (±10%, check voltage drop)
- control current without motor brake A 1 1.25
- control current with one motorbrake A 3.5 3.75
8.6.2.2 Wiring example 24 VDC supply
Example for three phase power supply unit.
single axis
Input data
dual axis
8.7 DC Bus link (X3)
Beta Drives: DC Bus sharing functionality is pending. Do not use this functionality until further notice.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 75
Page 76

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.8 External Regen resistor (X3)
Fortechnical data on the rheostatic brake circuit (➜ # 42).
Fusing(such as fusible cut-outs or power switches) to be providedby the user.
8 pin, pitch 7.62 mm
optional T version
Matingconnector data see (➜ # 51).
Pin Signal Description
5 RBint internal Regen resistor
6 -RB external Regenresistor 7 +DC (+RBext) external Regen resistor +
8.8.1 Fusing and Wiring
FB1 / FB2 fusing
Drive Model Ampere
all AKD2G-Sxx 10A 40A Bussmann
FPS: Frizlen DC Power Switch
RBext FPS Range [In] cable cross section
BAR(U)1500-33 FPS-16 10 to 16 A min. 2.5 mm²
rating@240V
Ampere
rating@480V
UL region
example:
FWP-xxA14F
CE Region
example: Siba
110V to 400V: gRL(gS)
400V to 480V: aR
76 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 77

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9 Motor Power, Brake and Feedback connection
The AKD2G drive is able to protect the connected motorfrom overloading, if the parameters
areset correctly andthe thermal protection sensor is connected and supervised. With Kollmorgenmotors the valid data areautomatically set by the internal WorkBench motor database.
The dynamic voltagerise can lead to a reductionin the motor operating life and, on unsuitablemotors, to flashovers in the motor winding.
Only install motors with insulationclass F (acc. to IEC60085) or above.
Only install cables that meet the requirements (➜ # 52).
8.9.1 Motor connectivity, some examples
Axis 1: single cable connection (➜ # 78)
commutationfeedback: SFD3 or DSL
Axis 2: dual cableconnection (➜ # 78)
commutationfeedback: EnDAT, HIPERFACE,
Resolver etc. via SFA
Axis 1: dual cableconnection (➜ # 80)
commutationfeedback: Resolver, SFD, EnDAT,
HIPERFACE, BiSS, SinCos, ComCoder, Hall,
SmartAbs etc. via X23
position feedback:
- X21: Step/Direction
- X22: Step/Direction or incremental encoder
Axis 2: single cable connection (➜ # 78)
commutationfeedback: SFD3 or DSL
Axis 1: dual cableconnection (➜ # 80)
commutationfeedback: EnDAT, HIPERFACE,
Resolver etc. via SFA
position feedback:Resolver, SFD, EnDAT,
HIPERFACE, BiSS, SinCos, ComCoder, Hall,
SmartAbs etc. via X23
Axis 1: dual cableconnection (➜ # 80)
commutationfeedback: Resolver, SFD, EnDAT,
HIPERFACE, BiSS, SinCos, ComCoder, Hall,
SmartAbs etc. via X23
position feedback:
- X21: Step/Direction
- X22: Step/Direction or incremental encoder
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 77
Page 78

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.2 Motor single cable connection
Motors with two wire feedback systems like SFD3 or Hiperface DSL can be connected to
AKD2G via a single Kollmorgen hybrid cable. Dependingon the AKD2G version (singleor
dual axis), one or two singlecablemotor connections arepossible.
Drive type Commutation
Axis 1
Singleaxis standard X1 - - X21 - Singleaxis with Option I/O X1 - - X21 X22 Singleaxis with Option F3 X1 - - X21 - X23
Singleaxis with Option DX X1 - - X21 X22 X23
Dual axis standard X1 X2 - X21 X22 Dual axis with Option DX X1 X2 - X21 X22 X23
8.9.2.1 Motor Power, Brake and Feedback connectors X1, X2
X1 (Feedback 1) / X2 (Feedback 2)
MotorPower: 4 pin, pitch 7.62 mm
MotorBrake: 2 pin, pitch 3.81 mm
MotorFeedback: 2 pin, pitch 3.81 mm
Cable length: maximum 50 m
Use Kollmorgen cables
Matingconnector data see (➜ # 51).
Feedback types: SFD3, HIPERFACE DSL
Commutation
Axis 2
Velocity/Position loop
closure
Pinout is identical for connectors X1 andX2.
Pin Signal Description
1 U Motor phase U
2 V Motor phase V
3 W Motor phase W
5 PE Protective earth
B+ BR+ Brake positive line (safety notes and details referto (➜ # 82))
B- BR- Brake negative line (safety notes anddetails refer to (➜ # 82))
F+ COM+
F- COM-
78 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
SFD3, HIPERFACE DSL
Page 79

8.9.2.2 Feedback connectors X21, X22, X23
Velocity/Position loopclosing
Use Kollmorgen cables
Matingconnector data see (➜ # 51).
Cable length: maximum 50 m
Connector Functionality Pinout, Wiring
X21 Step/Direction, CW/CCW (➜ # 86)
X22 Step/Direction, CW/CCW, Incremental Encoder (➜ # 87)
X23 Several conventional feedback types (➜ # 88)
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 79
Page 80

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.3 Motor dual cable connection
Motors with conventional commutation feedback systems like resolver or sine encodercan
be connected to AKD2G with separated power/brake andfeedback cables. Feedback functions are assigned with parameters in WorkBench. Scaling and other settings are performed
in WorkBench, too. Velocity / Position loop closing and electronic gearing/ master-slave connection are possible via X21, X22, X23 depending on the drive versionand physical restrictions.
X1 (Feedback 1) / X2 (Feedback 2)
X23 (Feedback 3)
X21 (Feedback 4)
X22 (Feedback 5)
Matingconnector data see (➜ # 51).
MotorPower: 4 pin, pitch 7.62 mm
MotorBrake: 2 pin, pitch 3.81 mm
SFA connection: 2 pin, pitch 3.81 mm
Feedback types: see SFA connectivity (➜ # 89)
SubD HD 15poles
Feedback types: see X23 connectivity (➜ # 88)
2 x 11 pins (left connector A, right connector B)
Feedback types: see X21 connectivity (➜ # 86)
2 x 10 pins (left connector A, right connector B)
Feedback types: see X22 connectivity (➜ # 87)
80 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 81

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.3.1 Motor power and motor brake connectors X1, X2
Usually these lines are part of the Kollmorgen motorcableconnected to X1 or X2. For motor
brake safety notes and functional details referto (➜ # 82).
Use Kollmorgen cables
Matingconnector data see (➜ # 51).
Cable length: maximum 50 m
Pin Signal Description
1 U Motor phase U
2 V Motor phase V
3 W Motor phase W
5 PE Protective earth
B+ BR+ Brake positive, with Kollmorgencables only
B- BR- Brake negative, with Kollmorgen cables only
8.9.3.2 Feedback connectors X1, X2, X41, X21, X22, X23
Use Kollmorgen cables
Matingconnector data see (➜ # 51).
Cable length: maximum 50 m
Connector Functionality Pinout, Wiring
X1/X2 SFD3, DSL, SFA (➜ # 85)
X41 SFA at X1 or X2 , several conventional feedback types (➜ # 89)
X21 Step/Direction, CW/CCW (➜ # 86)
X22 Step/Direction, CW/CCW, Incremental Encoder (➜ # 87)
X23 Several conventional feedback types (➜ # 88)
Feedback connector X1, X2, X41
Conventional feedback systems can be connected to X1 or X2 via the optional feedback
adapterSFA. SFA offers the additional connector X41.
Connector X1 is a standard connector. Input for SFD3, DSL, or SFA.
Connector X2 is standardfor dual-axis drives. Input for SFD3, DSL, or SFA.
SFA: adapterfor several conventional feedback types
Feedback connector X21
Connector X21 is a standardconnector.
Input for Step/Direction and CW/CCW.
Feedback connector X22
Connector X22 is standard connector for dual-axis drives.
Connector X22 is part of option DX or IO for single axis drives.
Input for Step/Direction, CW/CCW, Incremental encoder
Feedback connector X23
Connector X23 is part of option DX or F3.
Input for several conventional feedback types.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 81
Page 82

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.4 Motor Holding Brake Connection
A 24 V holding brake in the motor can be controlled directly by the drive. For properfunction,
check voltagedrop, measure voltageat brake input and check brake function (on and off).
Brake voltagesupply via 24 V ±10% auxiliary voltagesupply of the drive on X10. Minimum
andmaximum brake current see Electrical Data (➜ # 36)respectively (➜ # 38).
AKD2G offers onemotor brake output for every axis on connector X1 and X2 (➜ # 82).
Connector Usable for
X1 Primary motor brake axis 1
X2 Primary motor brake axis 2
No functional Safety!
Serious injury could result when the load is not properly blocked. This function does not
ensure functional safety.
Functional safety, e.g. with hangingload (vertical axes), requires an additional brake.
The HardwareEnable does not initiate a controlledstop but switches off the powerstage
immediately.
Set parameterAXIS#.MOTOR.BRAKEIMM to 1 with vertical axes, to apply the brake
immediately after faults or Hardware Disable.
Pinout X1 / X2
Pin Signal Description
B+ BR+ Brake positive line
B- BR- Brake negative line
Wiring
Usually the brake lines arepart of the Kollmorgenhybrid single cable connection to X1
respectively X2 (➜ # 78).
82 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 83

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Functionality
The brake function must be enabled through a parameter. The diagram below shows the timing and functional relationships between the controlledstop signal, speed,and braking force.
All values can be adjusted with parameters; values in the diagram are default values.
The drive speed setpoint is internally driven down an adjustableramp (AXIS#.CS.DEC) to
0V.
With default values the output for the brake is switchedonwhenthe speed has reached
5rpm (AXIS#.CS.VTHRESH) for at least 6ms (AXIS#.CS.TO). The rise (t
) and fall (t
brH
brL
times of the holdingbrake that is built into the motor aredifferent for the various types of
motor.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 83
)
Page 84

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.5 Feedback Connection
AKD2G offers up to five feedback channels. These channels can serve
to commutate the motor (singlecable(➜ # 78)or dual cable (➜ # 82)),
to close the velocity and/orposition loops, and
to act as a command source (electronic gearing, flying sheer, master-slave (➜ # 90)).
The usage of the five channels may be freely configuredin software, subject only to a few
restrictions that are not physically sensible.
Exactly one feedback channel peraxis can commutate the motor.
At most onefeedback channel per axis can serve as the command source andthe same
feedback channel cannot also commutate the motor.
A feedback channel can serve as the command source for more than one axis.
FB1 cannot commutate axis 2. FB2 cannot commutate axis 1.
Feedback
channel
Feedback 1
Feedback 2
Feedback 3 X23 (➜ # 88) commutation feedback, velocity/position, command
Feedback 4 X21 (➜ # 86) commutation feedback, velocity/position, command
Feedback 5 X22 (➜ # 87) commutation feedback, velocity/position, command
Feedback Types Connectors
SFD3 X1, X2
Encoder Hiperface DSL X1, X2
Resolver X23, X41
SFD X23, X41
SinCos Encoder BiSS B (analog) X23, X41
Encoder BiSS C (digital) X23
SinCos Encoder ENDAT 2.1 X23, X41
Encoder ENDAT 2.2 (digital) X23, X41
Encoder HIPERFACE X23, X41
Sine Encoder X23, X41
Sine Encoder + Hall X23, X41
Incremental Encoder X22, X23, X41
Incremental Encoder + Hall (Comcoder) X23, X41
Hall Sensors X23, X41
Tamagawa Smart Abs X23, X41
Step/Direction X21, X22, X23, X41
CW/CCW X21, X22, X23, X41
Connector Pinout Usable for
X1 (➜ # 85) Axis 1: commutationfeedback
X41 (➜ # 89) Axis 1 via SFA: commutation feedback
X2 (➜ # 85) Axis 2: commutationfeedback
X41 (➜ # 89) Axis 2 via SFA: commutation feedback
84 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 85

8.9.5.1 Feedback Connector X1, X2
Wiring example SFD3 or HIPERFACE DSL
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
4 pin, pitch 7.62 mm plus 2x2 pin pitch 3.81 mm
Input for commutationfeedback: SFD3, DSL, SFA
Wiring example conventional Feedback types with SFA
Pin Signal Description
F+ COM+ SFD3 +, HIPERFACE DSL +, SFA +
F- COM- SFD3 -, HIPERFACE DSL -, SFA -
5 PE Cable shield(PE)
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 85
Page 86

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.5.2 Feedback Connector X21
2 x 11 pins (left connector A, right connector B), pitch 3.5 mm
Fast input, isolated, sink, type EN 61131-2 type 1
Input for commutationorposition feedback.
Input for Electronic Gearing, (➜ # 90)
Matingconnector data see (➜ # 51).
Wiring example
X21 Pin Step/Direction CW/CCW
A3 Step CW
A4 Direction CCW
B4 Common (DGND) Common (DGND)
86 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 87

8.9.5.3 Feedback Connector X22
Wiring example (Input)
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Standardfor dual axis drives, (➜ # 29), optional for single axis
drives
2 x 10 pins (left connector A, right connector B), pitch 3.5 mm
RS485 inputs
Input for commutationorposition feedback.
Input for Electronic Gearing, (➜ # 90)
Output for encoderemulation(EEO2), (➜ # 91)
Matingconnector data see (➜ # 51).
EEO output connection is similar.
X22 Pin Step/Direction CW/CCW Incremental Encoder
A20 Step + CW + Track A +
A21 Step - CW - Track A B20 Direction + CCW + Track B +
B21 Direction - CCW - Track B A17 AGND AGND AGND
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 87
Page 88

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.5.4 Feedback Connector X23
Connectivity OptionF3 orDX (➜ # 29)
Sub-D highdensity 15 pin, female
Use Kollmorgen feedback cables
Input for several feedback types
Input for Electronic Gearing, (➜ # 90)
Output for encoderemulation(EEO1), (➜ # 91)
Digital input (➜ # 103), Digital output (➜ # 107)
Matingconnector data see (➜ # 51).
Encoder power supply (X23 pins 10/11):
l Maximum voltage 9 V with shorted sense contacts (4/5), rated voltage 5 V +/-5%.
l Rated supply current is 350 mA.
l Voltage rise time ~4 ms with full load and 220 µF of capacitance.
l Encoder power lines capacitance 10 µF to 220 µF
X23 Pin SFD
Resol-
ver
BiSSBBiSSCEnDAT
2.1
EnDAT
2.2
Hiper-
face
Sine/
Cos
Sine/
Cos
+Hall
1 - - - - - - - - HallU - HallU HallU - - 2 - - CLK+ CLK+ CLK+ CLK+ - - HallV - HallV HallV - Step+ CW+
3 - - CLK- CLK- CLK- CLK- - - HallW - HallW HallW - Step- CW4 SEN+ - SEN+ SEN+ SEN+ SEN+
5 SEN- - SEN- SEN- SEN- SEN- SEN- SEN- SEN- SEN- - SEN- - -
SEN+ SEN+ SEN+ SEN+ - SEN+ - -
▌
6 COM+ R1 Ref+ DAT+ DAT+ DAT+ DAT+ DAT+ Zero+ Zero+ Zero+ Zero+ - SD+ Dir+ CCW+
7 COM- R2 Ref- DAT- DAT- DAT- DAT- DAT- Zero- Zero- Zero- Zero- - SD- Dir- CCW8 - Thermal control (+)
9 - Thermal control (-)
10 +5 V - +5 V +5 V +5 V +5 V
8 to 9
+5 V +5 V +5 V +5 V +5 V +5 V +5 V +5 V
V
11 0 V - 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V
12 - S1SIN+ A+ - A+ - SIN+ A+ A+ A+ A+ - - - 13 - S3SIN- A- - A- - SIN- A- A- A- A- - - - 14 - S2COS+ B+ - B+ - COS+ B+ B+ B+ B+ - - - 15 - S4COS- B- - B- - COS- B- B- B- B- - - - -
Incr.
Enc.
Incr.
Enc.
+Hall
Hall
Smart
Abs
Step/
Dir
CW/
CCW
CLK = CLOCK, DAT = DATA, SEN = SENSE
88 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 89

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.9.5.5 Feedback Connector X41 (SFA, accessory)
SFA (Smart Feedback Adapter)converts conventional feedback signals to a 2-wire serial signal. SFA can be
mounted to a top hat rail EN50022–35×7.5(or EN50022–35×15) or laid into the cable duct.
SFA adds a 15 pole HD SubD female connector X41 to the system for connection of a Kollmorgen motor feedback cable (see regional Accessories Manual).
Sub-D highdensity 15 pin, female
0.5 m shielded cablewith 3 flying leads for connection to X1 or X2
Input for Electronic Gearing, (➜ # 90)
Connected feedback must be set in WorkBench
Use Kollmorgen feedback cables
Output for encoderemulation(EEO3/EEO4), (➜ # 91)
Master-Slave (➜ # 93)
Connect the threeflying leads of the SFA cableto X1 (FB1, EEO3)or X2 (FB2, EEO4) :
X41 Pin SFD
1 - - - - - - - HallU - HallU HallU - - 2 - - CLK+ CLK+ CLK+ - - HallV - HallV HallV - Step+ CW+
3 - - CLK- CLK- CLK- - - HallW - HallW HallW - Step- CW4 SEN+ - SEN+ SEN+ SEN+
5 SEN- - SEN- SEN- SEN- SEN- SEN- SEN- SEN- - SEN- - 6 COM+ R1 Ref+ DAT+ DAT+ DAT+ DAT+ Zero+ Zero+ Zero+ Zero+ - SD+ Dir+ CCW+
7 COM- R2 Ref- DAT- DAT- DAT- DAT- Zero- Zero- Zero- Zero- - SD- Dir- CCW8 - Thermal control (+)
9 - Thermal control (-)
10 +5 V - +5 V +5 V +5 V
11 0 V - 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V 0 V
12 - S1SIN+ A+ A+ - SIN+ A+ A+ A+ A+ - - - 13 - S3SIN- A- A- - SIN- A- A- A- A- - - - 14 - S2COS+ B+ B+ - COS+ B+ B+ B+ B+ - - - 15 - S4COS- B- B- - COS- B- B- B- B- - - - -
Resol-
ver
CLK = CLOCK, DAT = DATA, SEN = SENSE
BiSSBEnDAT
2.1
EnDAT
2.2
Hiper-
face
▌
8 to 9
V
Sine/
Sine/
Cos
+Hall
SEN+ SEN+ SEN+ SEN+ - SEN+ - -
+5 V +5 V +5 V +5 V +5 V +5 V +5 V +5 V
Cos
Incr.
Enc.
Incr.
Enc.
+Hall
Hall
Smart
Abs
Step/
Dir
CW/
CCW
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 89
Page 90

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.10 Electronic Gearing, EEO, Master-Slave
AKD2G offers several feedback channels. These channels may also be usedas the command source (input) for electronic gearing or master-slave or for EEO (Emulated Encoder Output).
Feedback
channel
Feedback 1 EEO3
Feedback 2 EEO4
Feedback 3 EEO1 X23 (➜ # 88) FB3.SELECT
Feedback 4 n/a X21 (➜ # 86) FB4.SELECT
Feedback 5 EEO2 X22 (➜ # 87) FB5.SELECT
8.10.1 Electronic Gearing
AKD2G offers up to five feedback channels. Any of these channels may be used as the gearing command source. The gearing source is selected for each axis using
AXIS#.GEAR.FBSOURCE. Refer to the WorkBench Online Help for more information.
EEO
channel
Connector Pinout and
wiring example
X1 (➜ # 85)
X41 (➜ # 89)
X2 (➜ # 85)
X41 (➜ # 89)
Keyword to configure
the sensor type
FB1.SELECT
FB2.SELECT
90 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 91

8.10.2 Emulated Encoder Output (EEO)
The drive calculates the motor shaft position from the cyclic- absolute signals of the commutationfeedback, generating incremental-encodercompatible pulses or CW/CCW signals
or Pulse/Direction signals from this information.
The resolutionand the index (zero) position can be set in WorkBench. The outputs are driven
from an internal supply voltage. Refer to the WorkBench Online Help for more information.
When using a multispeed resolver(morethan2 poles) as commutationfeedback, the EEO
will create only onezeropulse per each mechanical revolution of the motor. Thezeropulse
is dependent on the motors starting position!
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Examples for Master-Slave connection see (➜ # 93).
Technical characteristics X22, EEO2
Pulse outputs on the connectorX22 are 2 signals, tracks A andB, with 90° phase difference
(i.e. in quadrature, hence the alternative term “A quad B” output).
Electrical Interface: RS-485, max. current 100 mA, the maximum number of connected
slaves is determined by the loadingcharacteristics of the slaves, 32 slaves can be driven
if the input impedance of the bias network is 10kΩ and only one slave has a DC termination resistor.
Max signal (channel)output frequency: 3 MHz
The pulses perrevolutionvalueis settable
Pulse phase shift: 90°±20°
X22 Signals EEO2 Description
A17 AGND Analog ground
A20 Track A+ EEO2 output, channel A positive
A21 Track A- EEO2output, channel A negative
B20 Track B+ EEO2 output, channel B positive
B21 Track B- EEO2output, channel B negative
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 91
Page 92

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Technical characteristics X23, EEO1
Pulse outputs on the SubD connector X23 are3 signals, A, B and Index, with 90° phase difference (i.e. in quadrature, hence the alternative term “A quad B” output), with a zero pulse.
Electrical Interface: 5V TTL, current 60 mA, max. number of connected slaves is determinedby the loading characteristics of the slaves, 32 slaves can be drivenif the input
impedance of the bias network is 10kΩ and only one slave has a DC terminationresistor.
Max signal (channel)output frequency: 3 MHz
The pulses perrevolutionvalueis settable
Pulse phase shift: 90°±20°
X23 Signals EEO1 Description
6 Zero+ EEO1 output, index positive
7 Zero- EEO1 output, index negative
11 0 V EEO1 output, ground
12 Track A+ EEO1 output, channel A positive
13 Track A- EEO1 output, channel A negative
14 Track B+ EEO1 output, channel B positive
15 Track B- EEO1 output, channel B negative
Technical characteristics X41 (SFA), EEO3/EEO4 (in process)
Pulse outputs on the SubD connector X41 are3 signals, A, B and Index, with 90° phase difference (i.e. in quadrature, hence the alternative term “A quad B” output), with a zero pulse.
Electrical Interface: 5V TTL, current 60 mA, max. number of connected slaves is determinedby the loading characteristics of the slaves, 32 slaves can be drivenif the input
impedance of the bias network is 10kΩ and only one slave has a DC terminationresistor.
Max signal (channel)output frequency: 3 MHz
The pulses perrevolutionvalueis settable
Pulse phase shift: 90°±20°
X41 Signals EEO3 Description
6 Zero+ EEO3 output, index positive
7 Zero- EEO3 output, index negative
11 0 V EEO3 output, ground
12 Track A+ EEO3 output, channel A positive
13 Track A- EEO3 output, channel A negative
14 Track B+ EEO3 output, channel B positive
15 Track B- EEO3 output, channel B negative
92 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 93

8.10.3 Master-Slave control
Several AKD2G can be connected as slave drives to another AKD2G which acts as a master. The slave drives use the master's encoder output signal (EEO, (➜ # 91)) as command
input and follow these commands (velocity and direction).
8.10.3.1 Master-Slave using X22
The master is configured for EEO4 (➜ # 91) on X2, the Slave uses X1 for command input.
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.10.3.2 Master-Slave using optional X23 or X41
The master is configured for EEO1 (➜ # 92) on X23 or EEO3/EEO4 ((➜ # 92)with SFA) on
X41, the Slave uses X23 (or X41 with SFA) for command input.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 93
Page 94

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.11 Motion Bus Interface (X11/X12)
The motionbus interface has RJ-45 connectors and can be used for communicating with fieldbus devices.
RJ45 with built-in green/red dual-color LED
X12 IN port, X11 OUT port
EtherCAT
Pin Signal Description
1 Tx+ Transmit +
2 Tx- Transmit 3 Rx+ Receive +
4 Termination Bob Smith termination
5 Termination Bob Smith termination
6 Rx- Receive 7 Termination Bob Smith termination
8 Termination Bob Smith termination
Do not connect the Ethernet line for the PC or PAC with the set up software to the motion
bus interface X11/X12. The service Ethernet cable must be connected to X20.
Bus topology example (EtherCAT)
We suggest to use Kollmorgen ENCP cables. For more possible system solutions refer to
the WorkBench Online Help.
Communication profile
ForEtherCAT communication profile description refer to the manual "AKD2G EtherCAT Communication".
94 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 95

8.12 CAN-Bus Interface (X13/X14)
AKD2G drives with connectivity option CN can be connectedto a CAN-Bus via two 6-pin
RJ25 connectors X13/X14.
Pin Signal Description
1 Termination Internal Termination Resistor
2 Shield Chassis
3 CAN_high CAN bus high signal
4 CAN_low CAN bus low signal
5 CAN_GND CAN bus ground
6 Termination Internal Termination Resistor
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
RJ25
Up to 1000 kbit/s operation
Node ID to be set by WorkBench
Baudrate to be set by WorkBench
8.12.1 CAN-Bus Topology
We recommend the use of KollmorgenCBP000 cables.
Cable requirements
To meet ISO 11898, a bus cablewith a characteristic impedance of 120 Ω should be used.
The maximum usable cable length for reliable communicationdecreases with increasing
transmission speed.
As a guide, you can use the followingvalues measured by Kollmorgen; however, these values arenot assured limits:
Characteristic impedance: 100–120 Ω
Cable capacitance max.: 60 nF / 1000 m
Lead loopresistance: 159.8 Ω / 1000 m
Transmission Rate (kBaud) 1000 500 250 125
Maximum Cable Length (m) 25 100 250 500
Lowercablecapacitance (max. 30 nF / 1000 m) andlower lead resistance (loop resistance,
115Ω / 1000 m) allow largerdistances. The characteristic impedance 150± 5 Ω requires terminating resistor 150 ± 5 Ω.
Communication profile
ForCANopencommunication profile descriptionrefer to the manual "AKD2G CAN-Bus Communication".
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 95
Page 96

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.12.2 CAN-Bus Wiring
96 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 97

8.12.3 Baud rate for CAN-Bus
The transmission rate can be set via the parameter CANBUS.BAUD in WorkBench.
Baud rate [kBit/s] CANBUS.BAUD
125 125 (default)
250 250
500 500
1000 1000
With a fix baud rate, the drive sends the boot up messagewith the baud rate saved in the
drive's non volatile memory after a power cycle.
8.12.4 Node Address for CAN-Bus
The node address can be set via parameter CANBUS.NODEID in WorkBench.
After changing the nodeaddress, you must turn off the 24 V auxiliary supply for the drive and
then turnit onagain.
8.12.5 CAN-Bus Termination
The last bus device on both ends of the CAN-Bus system must have terminationresistors.
The AKD2G has built-in 132ohms resistors that can be activated by connecting pins 1 and 6.
An optional termination plug is available for AKD2G (P-AKD-CAN-TERM). The optional termination plug is an RJ25 connectorwith an enclosed wire jumper betweenpins 1&6. The termination plug should be insertedinto the X13 connector of the last drive in the CAN network.
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
Remove the termination connector if the AKD2G is not the last CAN-Bus device anduse
X13 for connecting the next CAN node.
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 97
Page 98

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.13 Service Interface (X20)
RJ45 with built-in green/red dual-color LED
100/10 Mbit Ethernet TCP/IP
Supports Auto-IP, DHCP andfixed IP addressing
Supports point-to-point (i.e. Auto-IP) and connection via network
switches
Supports automatic discovery in WorkBench if in the same subnet.
Pin Signal Description
1 Tx+ Transmit +
2 Tx- Transmit 3 Rx+ Receive +
4 Termination Bob Smith termination
5 Termination Bob Smith termination
6 Rx- Receive 7 Termination Bob Smith termination
8 Termination Bob Smith termination
Operating, position control, and motion-block parameters can be set up by using the setup
software on an ordinary commercial PC (➜ # 117).
Connect the service interface X20 of the drive to an Ethernet interface on the PC directly or
via a network switch, while the supply to the equipment is switched off. Use standard
Cat. 5 Ethernet cables for connection (in some cases crossover cables will also work).
Confirm that the link LED on the AKD2G (RJ45 connector) and on your PC (or network
switch) areboth illuminated. If both lights are green, then you have a good electrical connection.
8.13.1 Possible Network Configurations
98 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
Page 99

8.14 I/O Connection (X21/X22/X23)
8.14.1 Pinout
X21
standard
2 x 11 pins, pitch 3.5 mm
A: left connector
B: right connector
X21 Pin Signal Pin Signal
AKD2G-S Installation, Safety 1 | 8 Electrical Installation
X22
standard for dual-axis drives
optional for single axis drives
2 x 10 pins, pitch 3.5 mm
A: left connector
B: right connector
A1 Analog-In (AIN) 1 + B1 Analog-Out (AOUT) 1
A2 Analog-In (AIN) 1 - B2 AGND
A3* Digital-In (DIN) 1 B3 +24 V
A4* Digital-In (DIN) 2 B4 DGND
A5 Digital-In (DIN) 3
(HW-Enable Axis 1)
A6 Digital-In (DIN) 4
(HW-Enable Axis 2)
A7 Digital-In (DIN) 5 B7 Digital-Out (DOUT) 1
A8 Digital-In (DIN) 6 B8 Digital-Out (DOUT) 2
A9 Digital-In (DIN) 7 B9 Digital-Out (DOUT) 3
A10 Digital-In (DIN) 8 B10 Digital-Out (DOUT) 4
A11 STO-A-A1 B11 STO-B-A1
X23
optional
SubD 15 pins HD
Matingconnector:
male
B5 Digital-Out (DOUT) 9 +
(Relay)
B6 Digital-Out (DOUT) 9 -
(Relay)
X22 (optional for single axis drives, standard for dual-axis drives)
Pin Signal Pin Signal
A12 STO-A-A2, dual-axis B12 STO-B-A2, dual-axis
A13 Digital-In (DIN) 9 B13 Digital-Out (DOUT) 5
A14 Digital-In (DIN) 10 B14 Digital-Out (DOUT) 6
A15 Digital-In (DIN) 11 B15 Digital-Out (DOUT) 7 +
A16 Digital-In (DIN) 12 B16 Digital-Out (DOUT) 7 A17 AGND B17 Digital-Out (DOUT) 8 +
A18 Analog-In (AIN) 2+ B18 Digital-Out (DOUT) 8 A19 Analog-In (AIN) 2- B19 Analog-Out (AOUT) 2
A20* Digital-In/Out (DIO) 1
+
A21* Digital-In/Out (DIO) 1 - B21* Digital-In/Out (DIO) 2 -
X23 (optional) Pin Signal
2 Digital-In/Out (DIO) 6 +
3 Digital-In/Out (DIO) 6 6 Digital-In/Out (DIO) 5 +
7 Digital-In/Out (DIO) 5 10 +5 V
11 0 V
12 Digital-In/Out (DIO) 3 +
13 Digital-In/Out (DIO) 3 14 Digital-In/Out (DIO) 4 +
15 Digital-In/Out (DIO) 4 -
B20* Digital-In/Out (DIO) 2 +
Kollmorgen | kdn.kollmorgen.com | Beta, December 2018 99
Page 100

AKD2G-S Installation, Safety 1 | 8 Electrical Installation
8.14.2 Technical data
Interface Electrical Data
Analog inputs
Analog-In (AIN) 1 to 2
Analog outputs
Analog-Out (AOUT) 1 to 2
Digital inputs
Digital-In (DIN) 1 to 2
IEC 61131-2 Type 1
Digital inputs
Digital-In (DIN) 3 to 12
IEC 61131-2 Type 1
Digital outputs
Digital-Out (DOUT) 1 to 6
Digital outputs
Digital-Out (DOUT) 7 to 8
Digital inputs/outputs
Digital-In/Out (DIO) 1 to 6
RS485
Digital output
Digital-Out (DOUT) 9
Safe digital inputs
Axis 1: STO-A-A1, STO-B-A1
Axis 2: STO-A-A2, STO-B-A2
±10VDC
commonmode rejection ratio: > 30 dB at 60 Hz
resolution 16 bit and full monotonic
update rate: 16 kHz
non-linearity < 0.1% of full scale
offset drift max. 250µV/°C
input impedance > 13 kΩ
0 to +10 VDC, max 20 mA
resolution 16 bit and full monotonic
update rate: 4 kHz
non-linearity < 0.1% of full scale
offset drift max. 250µV/°C
short circuit protected to AGND
output impedance 110Ω
ON: 11 VDC to 30 VDC, 2 mA to 15 mA
OFF: -5 VDC to 5 VDC, max.15 mA
galvanic isolationfor 60VDC
activation / de-activation delay: < 1 µs / < 1 µs
ON: 11 VDC to 30 VDC, 2 mA to 15 mA
OFF: -5 VDC to 5 VDC, max.15 mA
galvanic isolationfor 60VDC
delay activation/de-activation: about 5 µs / 500 µs
max. 30 VDC, 100 mA
short circuit proof
galvanic isolationfor 60VDC
delay activation/de-activation: about 5 µs / 300 µs
volt-freecontacts, 100 mA
sink or source
galvanic isolationfor 60VDC
delay activation/de-activation: about 5 µs / 50 µs
reference potential X22: AGND, X23: 0V
input OFF: -0.3 V to +0.3 V
selectabletermination, difference/singleended
delay activation/de-activation: about 50 ns
max. 30 VDC, 1A
max. 42 VAC, 1 A
isolation 400 VDC contact/coil
delay open/close: 10 ms / 10 ms
ON: 17 VDC to 30 VDC, 5 mA to 6 mA
OFF: 0 VDC to 5 VDC, max.1 mA
galvanic isolationfor 60VDC
delay activation/de-activation about: 1.5 ms / 3.5 ms
100 Kollmorgen | kdn.kollmorgen.com | Beta, December 2018
 Loading...
Loading...