

Kollmorgan KC1 User Manual

KC1
Installation Manual
Edition: J, March 2017
Valid for KC1, Hardware Revision B
Part Number 903-400003-00
Original Document
Keep allmanuals as a product component during the life span of the product. Passallmanuals to
future users and owners of the product.
Record of Document Revisions
Revision Remarks
...
Table with lifecycle information of this document see (➜ # 128)
Connector voltage rating corrected, EnDAT 2.2 to X9&X8, Hall-Only Feedback new, hints for
G, 11/2015
"User Guide" replaced by hints for Workbench Onlinehelp, Use as Directed (DC supply / grouping notes), safety standard corrected (EN 62061for SIL)
H, 08/2016
Techn.Data X7 (Electr.Gearing)updated, Warning notes updated, chapter Handling moved,
PFH value changed
J, 03/2017 Frequency limit EnDat 2.2 changed
Hardware Revision (HR)
KC1
Minimum
Firmware
Minimum
Workbench
Export
Classification
Remarks
A from 1.6 from 1.6 3A225 Start revision, export control
B from 1.13 from 1.13 -
Hardware revision for export classification tracebility
purposes
Trademarks
EnDat is a registeredtrademark of Dr. Johannes Heidenhain GmbH
Windows is a registeredtrademark of Microsoft Corporation
Current patents
US Patent 5,162,798 (used in control card R/D)
US Patent 5,646,496 (used in control card R/D and 1 Vp-p feedback interface)
US Patent 6,118,241 (used in control card simple dynamic braking)
US Patent 8,154,228 (Dynamic BrakingFor Electric Motors)
US Patent 8,214,063 (Auto-tune of a Control System Based on Frequency Response)
Patents referring to fieldbus functions are listed in the matching fieldbus manual.
Technical changes which improve the performance of the device may be made without prior notice!
This document is the intellectual property of Kollmorgen™. All rights reserved. No part of this work may be
reproduced in any form (by photocopying, microfilm or any other method) or stored, processed, copied or distributed by electronic means without the written permission of Kollmorgen™.
2 Kollmorgen™ | kdn.kollmorgen.com | March 2017

KC1 InstallationManual | Table of Contents
1 Table of Contents
1 Table of Contents 3
2 General 7
2.1 About thisInstallation Manual 8
2.2 Using the PDF Format 8
2.3 SymbolsUsed 9
2.4 AbbreviationsUsed 10
2.5 Referred Standards 11
3 Safety 12
3.1 You should payattention to this 13
3.2 Use asDirected 15
3.3 Prohibited Use 16
4 Handling 17
4.1 Transport 18
4.2 Packaging 18
4.3 Storage 18
4.4 Decommissioning 19
4.5 Maintenance and cleaning 19
4.6 Disassemble 19
4.7 SystemRepair 20
4.8 Disposal 20
5 Approvals 21
5.1 Safe Torque Off (STO) approval 22
6 Package 23
6.1 PackageSupplied 24
6.2 Nameplate 24
6.3 Part Number Scheme 25
7 Technical description and data 26
7.1 The KC1 Familyof DigitalDrives 27
7.2 Ambient Conditions, Ventilation, and Mounting Position 28
7.3 MechanicalData 28
7.4 Inputs/Outputs 29
7.5 Electrical Data KC1-xzzz06 30
7.6 Performance Data 31
7.7 Recommended Tightening Torques 31
7.8 Fusing 32
7.8.1 External power supplyfusing 32
7.8.2 External 24 V supply fusing 32
7.8.3 External regen resistor fusing 32
7.9 Grounding System 32
7.10 Connectors 33
7.11 Cable and Wire Requirements 34
7.11.1 General 34
7.11.2 Cable cross sections and requirements 34
7.12 Dynamic Braking 35
7.12.1 Regen circuit 35
7.12.2 Functional description 35
7.12.3 Technicaldata for KC1-xzzz06 36
7.13 Switch-On andSwitch-Off Behavior 37
7.13.1 Switch-on behavior in standard operation 38
7.13.2 Switch-off behavior 39
Kollmorgen™ | kdn.kollmorgen.com | March 2017 3
KC1 InstallationManual | Table of Contents
7.13.2.1 Switch-off behavior using the DRV.DIS command 39
7.13.2.2 Switch-off behavior using a digitalinput (controlled stop) 40
7.13.2.3 Switch-off behavior using HW Enableinput (uncontrolled stop) 40
7.13.2.4 Switch-off behavior in the event of a fault 41
7.14 Stop / Emergency Stop / Emergency Off 44
7.14.1 Stop 44
7.14.2 Emergency Stop 45
7.14.3 Emergency Off 45
7.15 Safe Torque Off (STO) 45
7.15.1 Safety characteristicdata 45
7.15.2 Safety instructions 46
7.15.3 Use as directed 47
7.15.4 Prohibited use 47
7.15.5 Technicaldata and pinout 47
7.15.6 Enclosure, wiring 48
7.15.7 OSSD test pulses 48
7.15.8 Functional description 49
7.15.8.1 Signal diagram (sequence) 49
7.15.8.2 Wiring examples 50
7.15.8.3 Functional test 50
7.16 Shock-hazard Protection 51
7.16.1 Leakage current 51
7.16.2 Residualcurrent protectivedevice (RCD) 51
7.16.3 Isolating transformers 51
8 Mechanical Installation 52
8.1 Important Notes 53
8.2 Guide to MechanicalInstallation 53
8.3 MechanicalDrawings Standard Width 54
8.3.1 Control cabinetlayout KC1-xzzz06, standard width 54
8.3.2 DimensionsKC1-xzzz06,standard width 55
9 Electrical Installation 56
9.1 Important Notes 57
9.2 Guide to electricalinstallation 58
9.3 Wiring 59
9.4 Components of aServosystem 60
9.5 Connection Overview 61
9.5.1 Connector assignment KC1-x00106 to KC1-x00606 61
9.5.2 Connector assignment KC1-x01206 61
9.5.3 Connector assignment KC1-x02406 62
9.5.4 Connection diagram KC1-x00106 to KC1-x00606 63
9.5.5 Connection diagram KC1-x01206 64
9.5.6 Connection diagram KC1-x02406 65
9.6 EMI Noise Reduction 66
9.6.1 Recommendations for EMI noise reduction 66
9.6.2 Shielding with external shielding busbar 67
9.6.2.1 ShieldingConcept 67
9.6.2.2 ShieldingBusbar 68
9.6.3 Shielding connection to the drive 69
9.6.3.1 Grounding plates 69
9.6.3.2 Shield connection clamps 69
9.6.3.3 Motor connector X2 withshieldingconnection 69
9.7 Electrical Supply Connection 70
9.7.1 Connection to various mainssupplynetworks KC1-xzzz06 (120V to 240V) 70
9.7.2 24 V auxiliary supply (X1) 71
4 Kollmorgen™ | kdn.kollmorgen.com | March 2017
KC1 InstallationManual | Table of Contents
9.7.3 Mainssupplyconnection (X3, X4) 72
9.7.3.1 Three phase connection (allKC1 types) 73
9.7.3.2 Single/Dual phase connection (KC1-x00106 to KC1-x01206 only) 73
9.8 DC Bus link (X3) 74
9.8.1 DC Bustopology with Y connectors (24 A max.) 75
9.8.2 DC Bustopology with busbar 75
9.8.3 External regen resistor (X3) 76
9.9 Motor Power Connection (X2) 77
9.10 Motor Brake Connection (X2) 79
9.10.1 Brake connector X2 79
9.10.2 Functionality 80
9.11 Feedback Connection (X10) 81
9.11.1 Feedback connector (X10) 82
9.11.2 SFD 83
9.11.3 SFD3 84
9.11.4 Hiperface DSL 85
9.11.5 Encoder with BiSS Mode C 86
9.11.6 Encoder with EnDat 2.2 87
9.11.6.1 Connection to X10 87
9.11.6.2 Connection to X9 and X8 88
9.11.7 Incremental Encoder 89
9.11.8 Tamagawa Smart AbsEncoder 90
9.11.9 HallSensors 91
9.12 Electronicgearing, Master-slave operation (X9, X7) 92
9.12.1 Technicalcharacteristicsand pinout 92
9.12.1.1 Connector X7 Input 92
9.12.1.2 Connector X9 Input 93
9.12.1.3 Connector X9 Output 93
9.12.2 Command encoder signalconnection 94
9.12.2.1 Incremental encoder input 5 V (X9) 94
9.12.2.2 Incremental encoder input 24 V(X7) 94
9.12.2.3 Encoder with EnDat 2.2 input 5 V (X9) 95
9.12.3 Pulse / Direction signal connection 96
9.12.3.1 Pulse / Direction input 5 V (X9) 96
9.12.3.2 Pulse / Direction Input 5 V to 24 V (X7) 96
9.12.4 CW /CCW signal connection 97
9.12.4.1 CW / CCW input 5 V (X9) 97
9.12.4.2 CW / CCW input 24 V (X7) 97
9.12.5 Emulated Encoder Output (EEO) 98
9.12.6 Master-Slave control 99
9.13 I/O Connection 100
9.13.1 Analog Input (X8) 101
9.13.2 Analog Output (X8) 102
9.13.3 DigitalInputs (X7/X8) 103
9.13.3.1 Digital Inputs 1 and 2 104
9.13.3.2 Digital Inputs 3 to 7 105
9.13.3.3 Digital Input 8(ENABLE) 105
9.13.4 DigitalOutputs (X7/X8) 106
9.13.4.1 Digital Outputs 1 and 2 106
9.13.4.2 FAULT relay contacts 107
9.14 LED display 108
9.15 Rotary Switches(S1, S2) 108
9.16 Pushbuttons (B1) 108
9.17 ServiceInterface (X11) 109
Kollmorgen™ | kdn.kollmorgen.com | March 2017 5
KC1 InstallationManual | Table of Contents
9.17.1 Pinout X11 109
9.17.2 ServiceBus ProtocolsX11 109
9.17.3 PossibleNetwork Configurations 109
9.17.4 Setting the IP Address 110
9.18 CAN-Bus Interface (X12/X13) 111
9.18.1 Baud rate for CAN-Bus 112
9.18.2 Node Address for CAN-Bus 113
9.18.3 CAN-Bus Termination 113
9.18.4 CAN-Bus Cable 113
9.18.5 CAN-Bus Wiring 114
10 Setup 115
10.1 Important Notes 116
10.2 Setup 117
10.2.1 Setup software WorkBench 117
10.2.2 Use as directed 117
10.2.3 Software description 118
10.2.4 Hardware requirements 118
10.2.5 Operating systems 118
10.2.6 Installation under Windows 2000/XP/VISTA/7 118
10.2.7 InitialDrive Test 119
10.2.7.1 Unpacking, mounting,and wiring the KC1 119
10.2.7.2 Minimum wiring for drivetest without load 119
10.2.7.3 Set IP address 120
10.2.7.4 Confirm connections 120
10.2.7.5 Installand start WorkBench 121
10.2.7.6 Set drive IP address in WorkBench 121
10.2.7.7 Enable the drive using the setup wizard 121
10.3 Fault and Warning Messages 122
10.3.1 Fault and warning messagesKC1 122
10.4 Troubleshooting the KC1 127
11 Record of Document Revisions 128
12 Index 129
6 Kollmorgen™ | kdn.kollmorgen.com | March 2017
KC1 InstallationManual | 2 General
2 General
2.1 About this Installation Manual 8
2.2 Using the PDF Format 8
2.3 Symbols Used 9
2.4 Abbreviations Used 10
2.5 Referred Standards 11
Kollmorgen™ | kdn.kollmorgen.com | March 2017 7
KC1 InstallationManual | 2 General
2.1 About this Installation Manual
This manual, KC1 Installation Manual ("Instructions Manual" according to EC Machinery Dir-
ective 2006/42/EC), describes theKC1 series of digital drives drive and includes information
needed to safely install an KC1. Manual updates can be downloadedfrom the Kollmorgen™
website (http://www.kollmorgen.com/zh-cn/products/drives/servo/kc1/).
Additional documents includethe following:
WorkBench Online Help: : describes how to use your drive in commonapplications. It
also provides tips for maximizing your system performance with the KC1. The Online
Help includes the Parameter and Command Reference Guide which provides information
for the parameters and commands used to program the KC1.
Accessories Manual.It provides information for accessories like cables and regenres-
istors used with KC1. Regional variants of this manual exist.
2.2 Using the PDF Format
This document includes several features for ease of navigation
Cross References Table of contents andindex include active cross references.
Table of contents and
index
Page/chapter numbers
in the text
Lines are active cross references. Click on the lineand the appropriate page is accessed.
Page/chapternumbers with cross references areactive links.
8 Kollmorgen™ | kdn.kollmorgen.com | March 2017
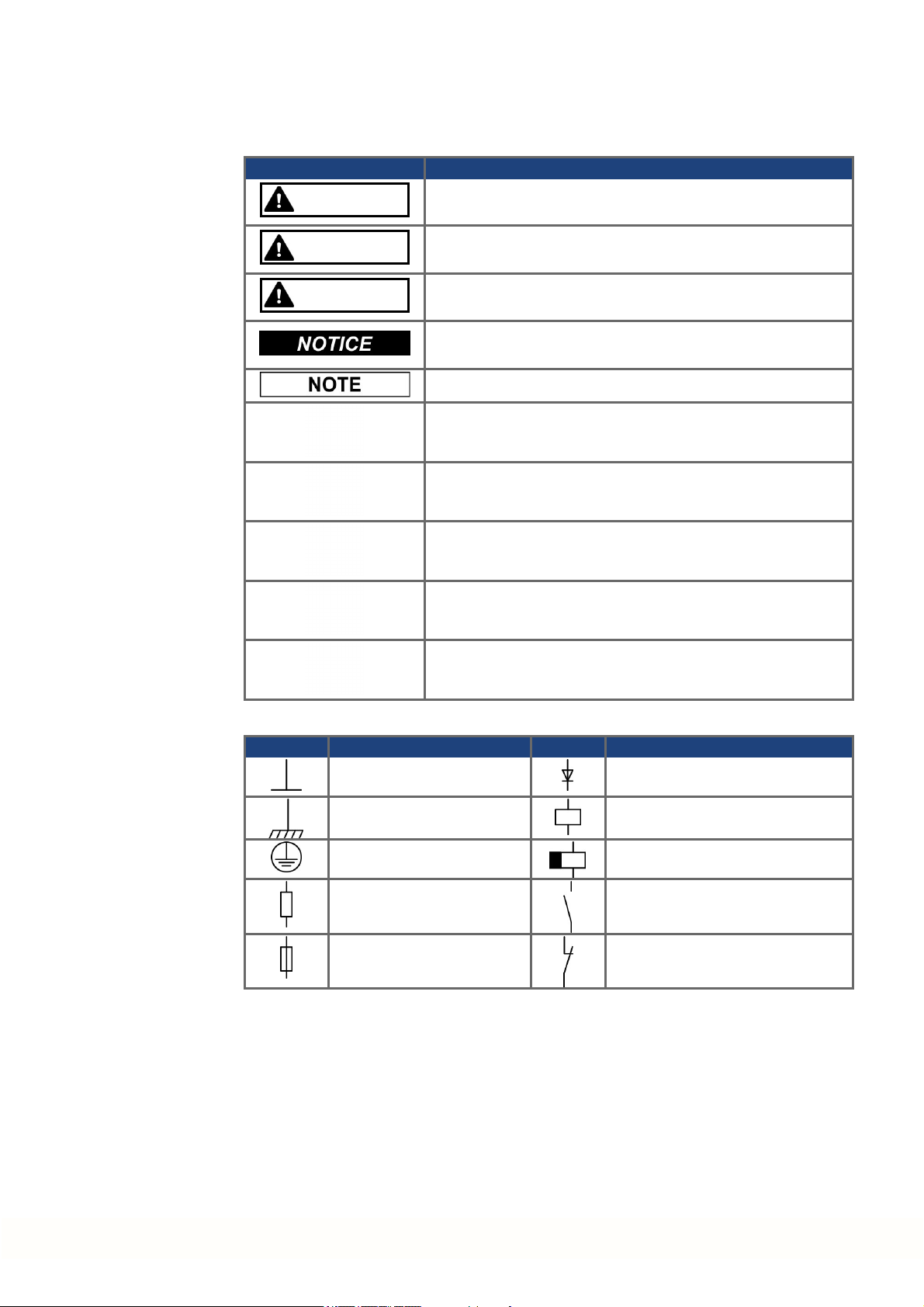
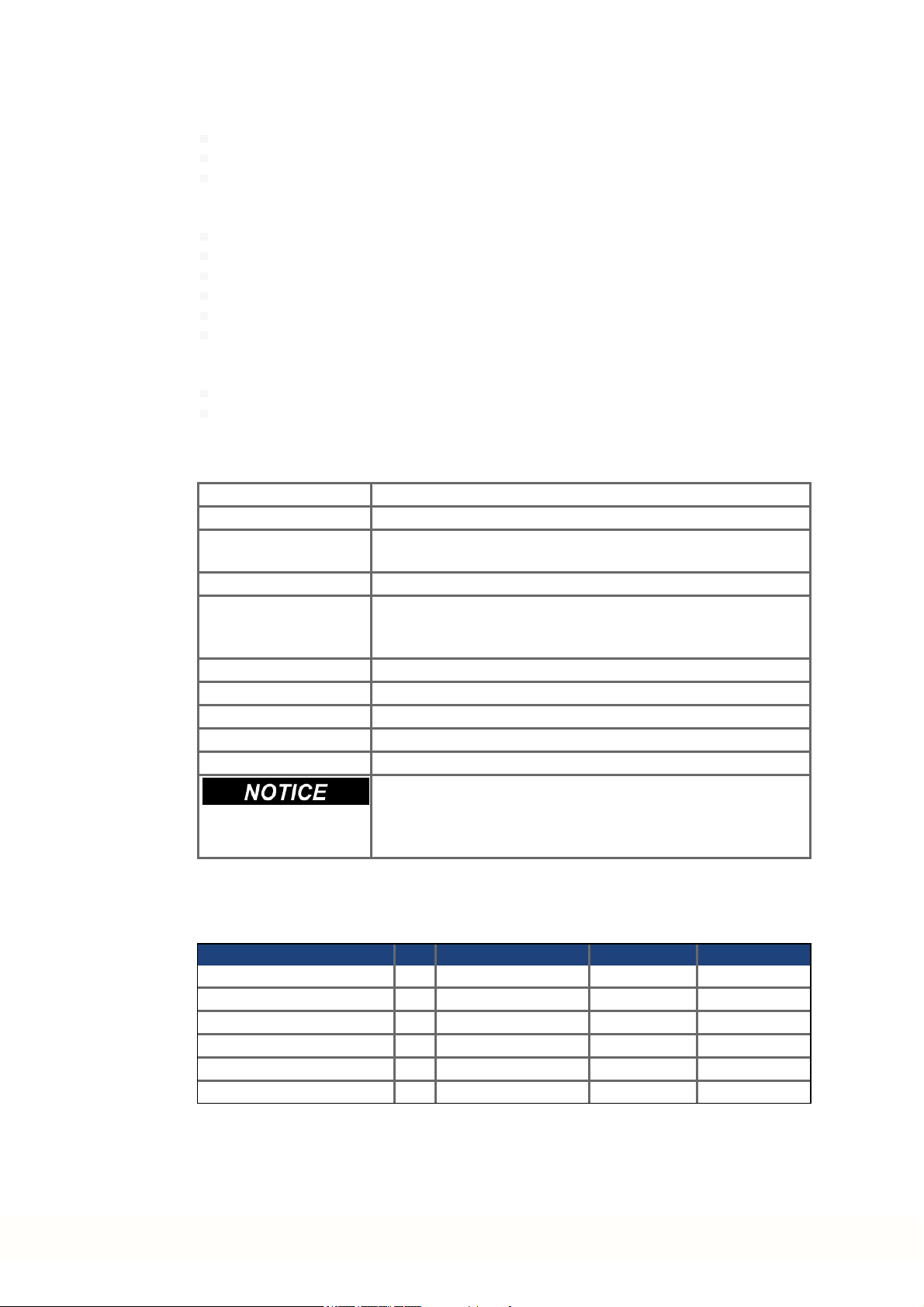
2.3 Symbols Used
Warning Symbols
Symbol Indication
DANGER
Indicates a hazardous situation which, if not avoided, will result
in death or serious injury.
KC1 InstallationManual | 2 General
WARNING
CAUTION
Indicates a hazardous situation which, if not avoided, could result in death or serious injury.
Indicates a hazardous situation which, if not avoided, could result in minor or moderate injury.
Indicates situations which, if not avoided, couldresult in property damage.
This symbol indicates important notes.
Warning of a danger (general). The type of danger is specified
by the text next to the symbol.
Warning of danger from electricity and its effects.
Warning of danger from hot surface.
Warning of danger from suspended loads.
Warning of danger from automatic start.
Drawing symbols
Symbol Description Symbol Description
Signal ground Diode
Chassis ground Relay
Protective earth Relay switch off delayed
Resistor Normally open contact
Fuse Normally closed contact
Kollmorgen™ | kdn.kollmorgen.com | March 2017 9
KC1 InstallationManual | 2 General
2.4 Abbreviations Used
Abbreviation Meaning
(➜ # 53) "see page 53" in this document
AGND Analog ground
COM Serial interface for a personal computer
DCOMx Communication line for digital inputs (with x=7 or 8)
Disk Magnetic storage(diskette, hard disk)
EEPROM Electrically erasable programmable memory
EMC Electromagnetic compatibility
F-SMA Fiber optic cable connector according to IEC 60874-2
KAS KollmorgenAutomation Suite
LED Light-emitting diode
LSB Low significant byte (or bit)
MSB Main significant byte (or bit)
NI Zero pulse
PC Personal computer
PE Protective earth
PLC Programmable logic control
PWM Pulse-width modulation
RAM Random access memory (volatile memory)
R
Brake/RB
Regenresistor (also called a brake resistor)
RBext External regen resistor
RBint Internal regenresistor
RCD Residual current device
ROD Incremental encoder (A quad B)
S1 Continuous operation
STO Safe torque off
VAC Volts, alternatingcurrent
VDC Volts, direct current
10 Kollmorgen™ | kdn.kollmorgen.com | March 2017
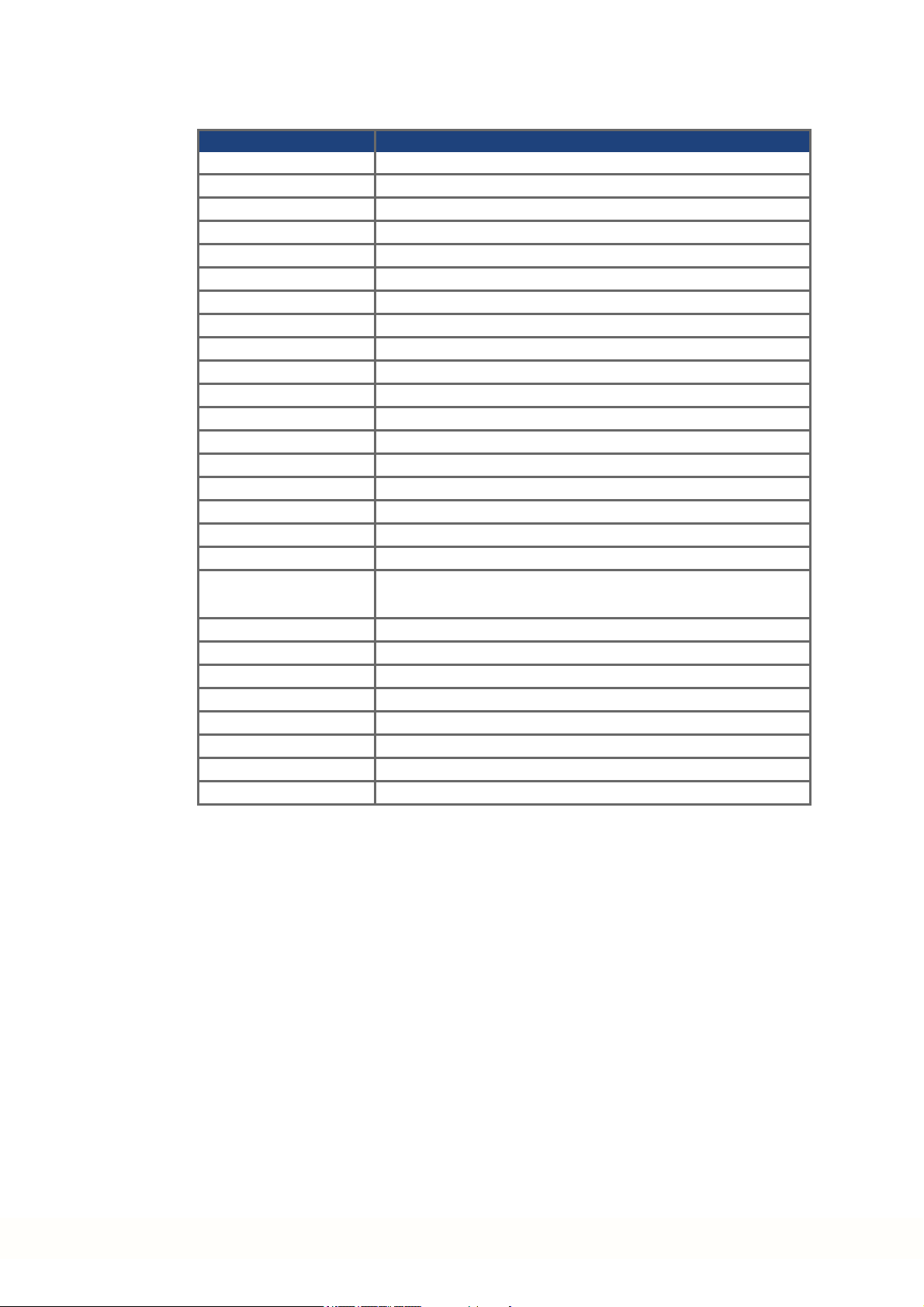
2.5 Referred Standards
Standard Content
ISO 4762 Hexagon socket head cap screws
ISO 11898 Road vehicles — Controller areanetwork (CAN)
ISO 12100 Safety of machinery: Basic concepts, general principles for design
ISO 13849 Safety of machinery: Safety-related parts of control systems
IEC 60085 Electrical insulation- Thermal evaluation and designationMaintenance
IEC 60204 Safety of Machinery: Electrical equipment of machinery
IEC 60364 Low-voltageelectrical installations
IEC 60439 Low-Voltage Switchgear and Controlgear Assemblies
IEC 60529 International protection rating (IP code)
IEC 60664 Insulation coordination for equipment within low-voltagesystems
IEC 60721 Classification of environmental conditions
IEC 61000 Electromagnetic compatibility (EMC)
IEC 61131 Programmable controllers
IEC 61491 Electrical equipment of industrial machines – Serial data link for real-time
IEC 61508 Functional safety of electrical/electronic/programmable electronic safety-
IEC 61800 Adjustable speed electrical power drive systems
IEC 62061 Functional safety of electrical/electronic/programmable electronic safety-
IEC 82079 Preparationof instructions for use - Structuring, content and presentation
UL 840 UL Standard for Safety for Insulation CoordinationIncluding Clearances and
UL 508C UL Standard for Safety Power Conversion Equipment
KC1 InstallationManual | 2 General
communications betweencontrols and drives.
related systems
related systems
Creepage Distances for Electrical Equipment
IEC - International Electrotechnical Commission
ISO - International Organization forStandardization
UL - Underwriters Laboratories
Kollmorgen™ | kdn.kollmorgen.com | March 2017 11

KC1 InstallationManual | 3 Safety
3 Safety
3.1 You should pay attention to this 13
3.2 Use as Directed 15
3.3 Prohibited Use 16
12 Kollmorgen™ | kdn.kollmorgen.com | March 2017

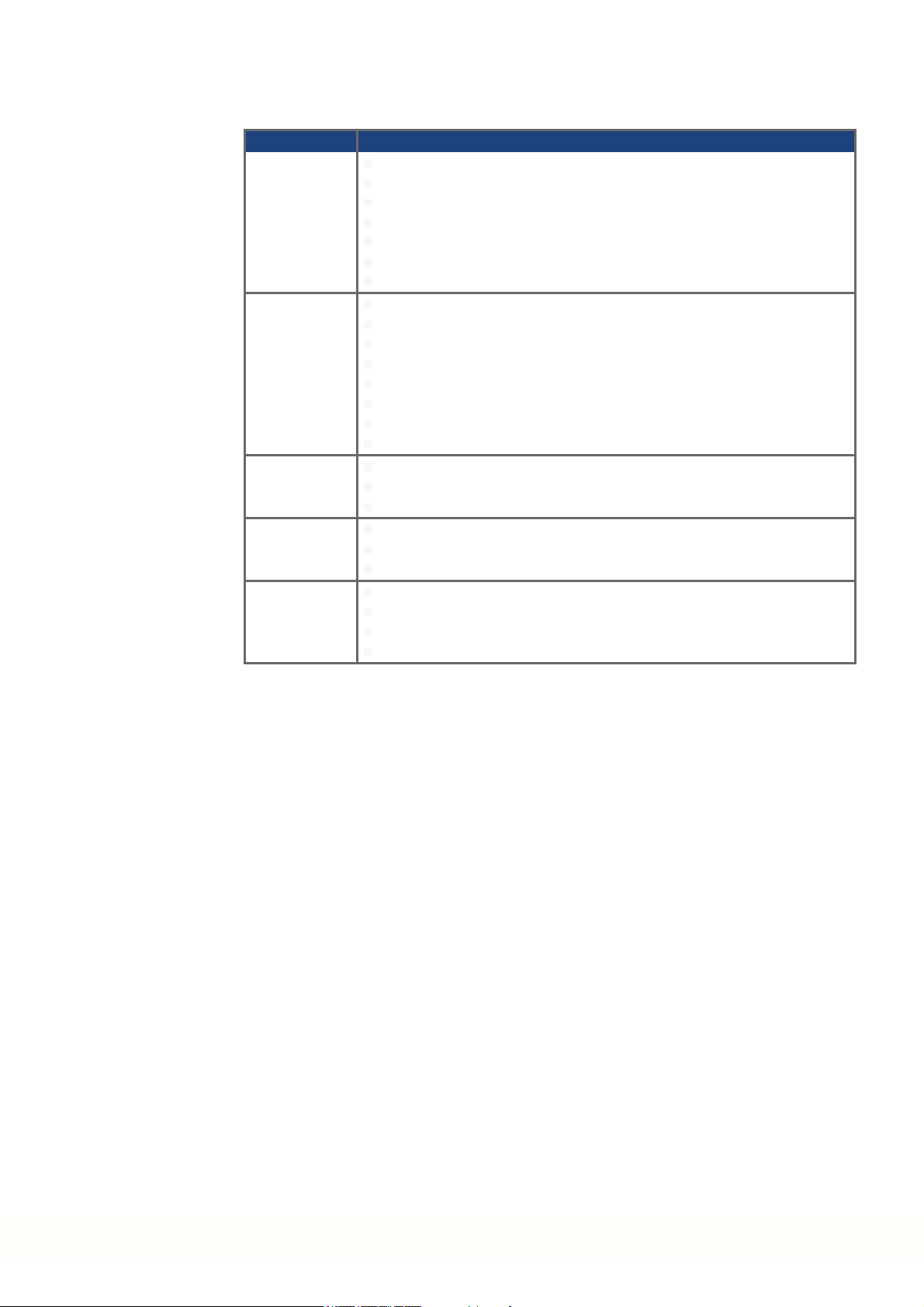
3.1 You should pay attention to this
This section helps you to recognize and avoid dangers to people and objects.
Specialist staff required!
Only properly qualified personnel are permitted to perform such tasks as transport,
assembly, setup and maintenance. Qualified specialist staff are persons who are familiar
with the transport, installation, assembly, commissioningand operation of drives and who
bring theirrelevant minimum qualifications to bear ontheir duties:
Transport: only by personnel with knowledge of handling electrostatically sensitive components.
Unpacking: only by electrically qualified personnel.
Installation: only by electrically qualified personnel.
Basic tests / Setup: only by qualified personnel with knowledge of electrical engineering
anddrive technology
The qualifiedpersonnel must know and observe ISO 12100 / IEC 60364 / IEC 60664 and
national accident prevention regulations.
Read the documentation!
Read the availabledocumentation before installation and commissioning. Improper handling
of the drive can cause harm to peopleor damage to property. The operator of systems using
the KC1 must require that all personnel who work with the drive read andunderstand the
manual beforeusing the drive.
KC1 InstallationManual | 3 Safety
Check Hardware Revision!
Check the HardwareRevision Numberof the product (see product label). This number is the
link between your product and the manual, it must match the Hardware Revision Number on
the cover page of the manual.
Pay attention to the technical data!
Adhere to the technical data and the specifications on connection conditions (rating plate and
documentation). If permissible voltage values or current values are exceeded, the drives can
be damaged. Unsuitable motor or wrong wiring will damage the system components. Check
the combination of drive and motor. Compare the rated voltage and current of the units.
Perform a risk assessment!
The manufacturer of the machine must generate a risk assessment for the machine, and
take appropriate measures to ensure that unforeseen movements cannot cause injury or damageto any person orproperty. Additional requirements on specialist staff may also result
from the risk assessment.
Automatic Restart!
The drive might restart automatically after power on, voltagedip or interruption of the supply
voltage, depending on the parameter setting. Risk of death or serious injury for humans working in the machine.
If the parameter DRV.ENDEFAULT is set to 1, then place a warning sign to the machine
(Warning: Automatic Restart at Power On) and ensure, that power on is not possible, while
humans are in a dangerous zone of the machine. In case of using an undervoltage protection
device, you must observe EN 60204-1:2006 chapter 7.5 .
Kollmorgen™ | kdn.kollmorgen.com | March 2017 13
KC1 InstallationManual | 3 Safety
Observe electrostatically sensitive components!
The drives contain electrostatically sensitive components which may be damagedby incorrect handling. Electrostatically discharge your body before touching the drive. Avoid contact
with highly insulating materials (artificial fabrics, plastic film etc.). Place the drive on a conductive surface.
Hot surface!
Drives may have hot surfaces during operation. The heat sink can reach temperatures above
80°C. Risk of minor burns! Measure the temperature, and wait until the heat sink has cooled
down below 40 °C before touching it.
Earthing!
It is vital that you ensure that the drive is safely earthed to the PE (protective earth)busbar in
the switch cabinet. Risk of electric shock. Without low-resistance earthing nopersonal protection can be guaranteed.
Leakage Current!
Since the leakage current to PE is more than 3.5 mA, in compliance with IEC61800-5-1 the
PE connection must eitherbe doubled or a connecting cable with a cross-section >10 mm²
must be used. Deviating measures accordingto regional standards might be possible.
High voltages!
The equipment produces high electric voltages up to 900V. Risk of electric shock. Do not
open or touch the equipment during operation. Keep all covers andcabinet doors closed.
Duringoperation, drives may have uncovered live sections, according to theirlevel of enclosureprotection.
Lethal danger exists at live parts of the device. Built-in protection measures such as insulation orshielding may not be removed. Work on the electrical installationmay only be performed by trained and qualified personnel, in compliance with the regulations for safety at
work, and only with switchedoff mains supply, and secured against restart.
Never undo any electrical connections to the drive while it is live. Thereis a danger of electrical arcing with damage to contacts and personal injury. Wait at least 7 minutes after disconnecting the drive from the main supply power before touching potentially live sections of
the equipment (such as contacts) or removing any connections.
Always measure the voltage in the DC bus link and wait until the voltage is below 50 V
before handling components.
Functional Safety!
The STO safety implementation on the KC1 is certified. The assessment of the safety functions according to EN13849 or EN 62061 must finally be done by the user.
Reinforced Insulation!
Thermal sensors, motor holdingbrakes and feedback systems built into the connected motor
must have reinforcedinsulation (according to IEC61800-5-1) against system components
with power voltage, accordingto the required applicationtest voltage. All Kollmorgen™ components meet these requirements.
Never modify the drive!
It is not allowed to modify the drive without permission by the manufacturer. Opening the
housing causes loss of warranty.
14 Kollmorgen™ | kdn.kollmorgen.com | March 2017

3.2 Use as Directed
The KC1 drives are exclusively intended for driving suitable synchronous servomotors with
closed-loopcontrol of torque, speed, and/or position.
KC1s are components that arebuilt into electrical plants or machines and can only be operated as integral components of these plants or machines. The manufacturer of the machine
used with a drive must generate a risk assessment for the machine. When the drives are
built into machines or plant, the drive must not be used until it has been established that the
machine or plant fulfills the requirements of the regional directives.
Cabinet and wiring
Drives must only be operated in a closed control cabinet suitable for the ambient conditions
(➜ # 26). Ventilationor cooling may be necessary to keepthetemperature within the cabinet
below 40 °C.
Use only copper conductors for wiring. The conductor cross-sections can be derived from
the standard IEC 60204 (alternatively for AWG cross-sections: NEC Table310-16, 75 °C
column).
Power supply
Drives in the KC1 series can be suppliedas follows:
KC1 InstallationManual | 3 Safety
KC1-x00106 to KC1-x01206: 1 or 3 phase industrial supply networks;
KC1-x02406: 3 phase industrial supply net works.
Connection to other voltage types of supply networks is possible with an additional isolating
transformer(➜ # 70).
Periodic overvoltages between phases (L1, L2, L3) andthe housing of the drive must not
exceed 1000V peak. In accordance with IEC 61800, voltage spikes (< 50 µs) between
phases must not exceed1000 V. Voltage spikes (<50 µs) between a phase and the housing
must not exceed 2000 V.
EMC filter measures for KC1-xzzz06 must be implemented by the user.
For the cases of group installations and of DC powered drives
KC1 has not been evaluated by Kollmorgen™, UL, or TÜV for group installations nor are ratings defined for DC input voltage.
Group installations must be reviewed and evaluated by the user for branch circuit protection*,
wire size, wire voltage rating, fuse protection, system dielectric requirements, overvoltage
andinput** current rating.
In case of DC supplied drives the built-in EMC filter will not work. The useris responsible to
keep the conducted emissions and the immunity of the drive within the required noise levels.
* Special care must be taken in branch circuit design with mixed rating drives to avoid the
smaller drives becoming the effective ‘fuse’ rather than the circuit protective fuse.
** The power supply system design must ensure inrush current protection by limiting input
current duringpower up. DC supply polarity must be properly wired. Improper polarity of DC
powerwill damage the drive and void warranty.
Motor voltage rating
The rated voltage of the motors must be at least as high as the DC bus link voltagedivided
by √2 produced by the drive (U
nMotor
>=UDC/√2).
Safe torque off
Review the section "Use as Directed" in the STO chapter(➜ # 47) before using this safety
function (according to ISO 13849 category 3).
Kollmorgen™ | kdn.kollmorgen.com | March 2017 15

KC1 InstallationManual | 3 Safety
3.3 Prohibited Use
Otheruse thanthat described in chapter “Use as directed” is not intended and can lead to personnel injuries and equipment damage. The drive may not be usedwith a machine that does
not comply with appropriate national directives or standards. The use of the drive in the following environments is also prohibited:
potentially explosive areas
environments with corrosive and/or electrically conductive acids, alkaline solutions, oils,
vapors, dusts
ships or offshoreapplications
16 Kollmorgen™ | kdn.kollmorgen.com | March 2017
KC1 InstallationManual | 4 Handling
4 Handling
4.1 Transport 18
4.2 Packaging 18
4.3 Storage 18
4.4 Decommissioning 19
4.5 Maintenance and cleaning 19
4.6 Disassemble 19
4.7 System Repair 20
4.8 Disposal 20
Kollmorgen™ | kdn.kollmorgen.com | March 2017 17
KC1 InstallationManual | 4 Handling
4.1 Transport
Transport the KC1 in accordance with IEC 61800-2 as follows:
Transport only by qualified personnel in the manufacturer’s original recyclablepackaging.
Avoid shocks while transporting.
Store at or below maximum stacking height, details see "Storage" (➜ # 18)
Transport only within specified temperature ranges: -25 to +70 °C, max. rate of change
20K/hour, class 2K3.
Transport only within specified humidity: max. 95% relative humidity, no condensation,
class 2K3.
The drives contain electrostatically sensitive components that can be damaged by incorrect
handling. Electrostatically discharge yourself before touching the drive. Avoid contact with
highly insulating materials, such as artificial fabrics and plastic films. Place the drive on a
conductive surface.
If the packaging is damaged, check the unit for visible damage. Inform the shipper and the
manufacturer of any damage to the package or product.
4.2 Packaging
The KC1 packaging consists of recyclable cardboard with inserts and a label on the outside
of the box.
4.3 Storage
Model Package
Dimensions
(mm) HxWxL
up to KC1-x00606 113x 250 x 222 1.7
KC1-x01206 121 x 235x 267 3.2
KC1-x02406 158 x 394x 292 5
Store the KC1 in accordance with IEC 61800-2 as follows:
Store only in the manufacturer’s original recyclable packaging.
Store at or below maximum stacking height :
KC1-x00106 to 00606 models: 8 cartons, all other models 6 cartons,
Store only within specified temperatureranges: -25 to +55 °C, max.rate of change
20K/hour, class 1K4.
Storage only within specified humidity: 5 to 95% relative humidity, no condensation, class
1K3.
Store in accordance with the following duration requirements:
Less than 1 year: without restriction.
More than 1 year: capacitors must be re-formed beforesetting up and operating the
drive. Re-forming procedures are described in the Kollmorgen DeveloperNetwork
(Forming).
Total Weight
KC1-x
(kg)
18 Kollmorgen™ | kdn.kollmorgen.com | March 2017
4.4 Decommissioning
Only professional staff who are qualified in electrical engineeringare allowedto decommission parts of the system.
DANGER: Lethal Voltages!
There is a dangerof serious personal injury or death by electrical shock or electrical arcing.
Switch off the main switch of the switchgear cabinet.
Securethe system against restarting.
Block the main switch.
Wait at least 7 minutes after disconnecting.
4.5 Maintenance and cleaning
The device does not require maintenance. Opening the device voids the warranty. The inside
of the unit can only be cleaned by the manufacturer.
Do not immerse orspray the device. Avoid that liquid enters the device.
To clean the device exterior:
1. Decommission the device (see chapter 4.4 "Decommissioning").
2. Casing: Clean with isopropanol orsimilar cleaning solution.
Caution : Highly Flammable! Risk of injury by explosion and fire.
Observe the safety notes given on the cleaning liquid package.
Wait at least 30 minutes after cleaningbefore putting the device back into operation.
3. Protective grill on fan: Clean with a dry brush.
KC1 InstallationManual | 4 Handling
4.6 Disassemble
Only professional staff who are qualified in electrical engineeringare allowedto disassemble
parts of the system.
1. Decommission the device (see chapter 4.4 "Decommissioning").
2. Check temperature.
3. Remove the connectors. Disconnect the potential earth connection last.
4. Demount: loosen thefastening screws. Remove the device.
CAUTION: High Temperature! Risk of minorburns. Duringoperation, the heat sink of
the drive may reach temperatures above 80°C (176°F). Before touching the device,
check the temperature andwait until it has cooled below 40°C (104°F).
Kollmorgen™ | kdn.kollmorgen.com | March 2017 19
KC1 InstallationManual | 4 Handling
4.7 System Repair
Only professional staff who are qualified in electrical engineeringare allowedto exchange
parts of the drive system.
CAUTION: Automatic Start! During replacement work a combination of hazards and mul-
tiple episodes may occur.
Work on the electrical installationmay only be performed by trained andqualified per-
sonnel, in compliance with the regulations for safety at work, and only with use of pre-
scribed personal safety equipment.
Exchange of KC1
Only the manufacturer can repair the device. Opening the device voids the warranty.
1. Decommission the device (see chapter 4.4 "Decommissioning").
2. Demount the device (see chapter4.6 "Disassemble").
3. Send the device to the manufacturer.
4. Install a new device as described in this manual.
5. Setup the system as described in this manual.
Exchange of other drive system parts
If parts of the drive system (for example cables) must be replaced, proceed as follows:
4.8 Disposal
1. Decommission the device (see chapter 4.4 "Decommissioning").
2. Exchange the parts.
3. Check all connections for correct fastening.
4. Setup the system as described in this manual.
To dispose the unit properly, contact a certified electronic scrap disposal merchant.
Contact Kollmorgen™ and clarify the logistics.
20 Kollmorgen™ | kdn.kollmorgen.com | March 2017
KC1 InstallationManual | 5 Approvals
5 Approvals
5.1 Safe Torque Off (STO) approval 22
Kollmorgen™ | kdn.kollmorgen.com | March 2017 21
KC1 InstallationManual | 5 Approvals
5.1 Safe Torque Off (STO) approval
An additional digital input (STO, Safe Torque Off) releases the power output stage of the
drive as long as a 24V signal is appliedto this input. If the STO input goes open-circuit, then
powerwill no longer besupplied to the motor, and the drive will lose all torque and coast to a
stop.
The safety circuit implementation for realizing the safety function "Safe Torque Off" in the
drive is suited for SIL2 according to IEC 62061 and PLd, Cat.3 according to ISO 13849-1.
Safety certificates can be found on the Kollmorgen™ website.
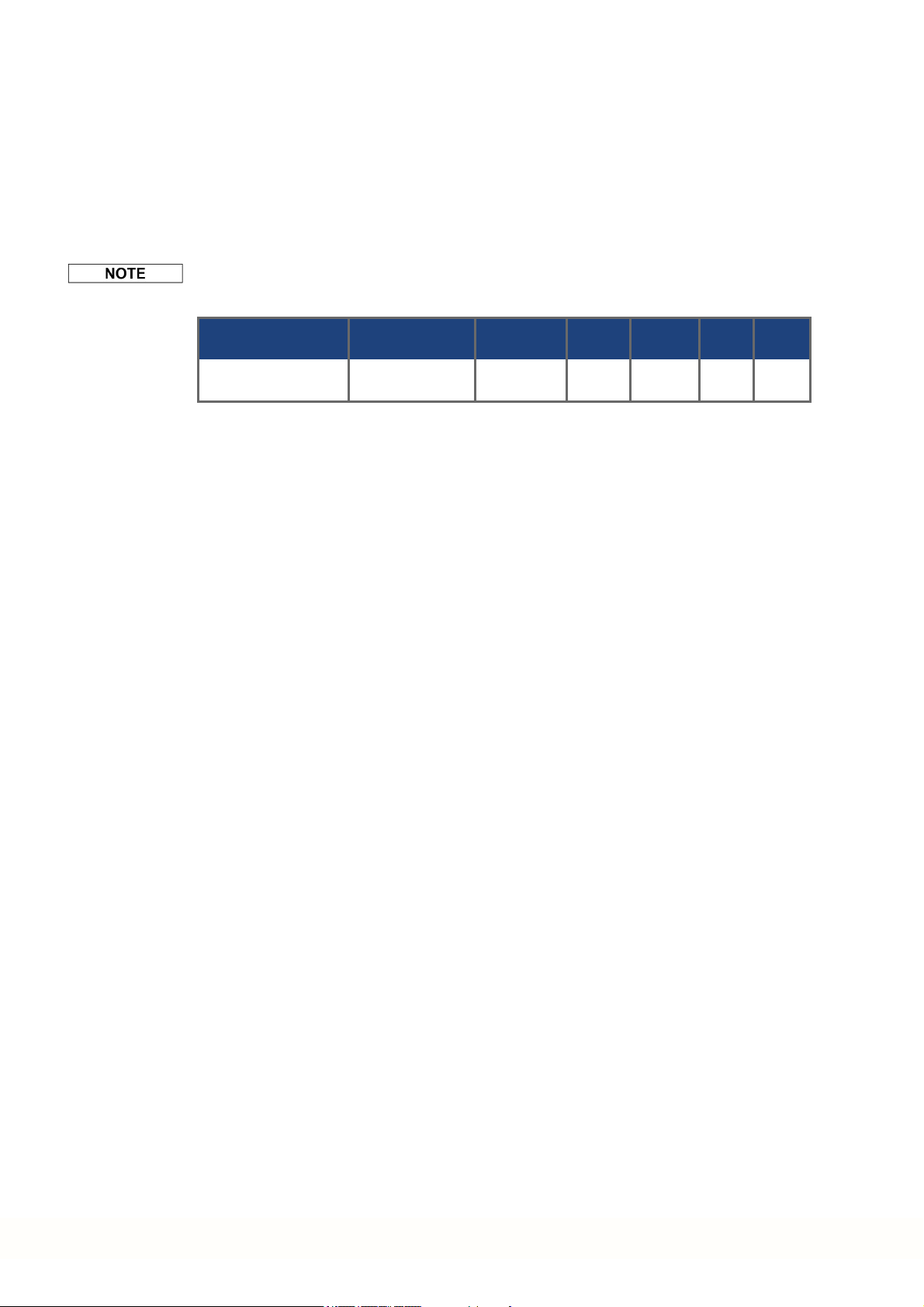
The subsystems (KC1) are totally described for safety technics with the characteristic data :
Device Operation
Mode
KC1-x single
channel
ISO
13849-1
IEC
62061
PFH
[1/h]
T
M
[Years]
SFF
[%]
PL d, CAT 3 SIL 2 1.50E-07 20 100
22 Kollmorgen™ | kdn.kollmorgen.com | March 2017
KC1 InstallationManual | 6 Package
6 Package
6.1 Package Supplied 24
6.2 Nameplate 24
6.3 Part Number Scheme 25
Kollmorgen™ | kdn.kollmorgen.com | March 2017 23
KC1 InstallationManual | 6 Package
6.1 Package Supplied
When a drive from the KC1 series is ordered, the following items are included in the drive
package:
KC1
Printedcopy of KC1 Quick Start
Printedcopy of fault and warning card
Mating connectors X1, X2, X3, X4, X7 and X8 (if required)
The mating SubD andRJ45 connectors are not included in the package.
Accessories Sold Separately
Accessories must be ordered separately if required; refer to yourregional accessories
manual:
EMC filters for 24 V and mains supply voltage, categories C2 or C3
External regen resistor
Motor cable. Assembled motor cables are available for all regions.
Feedback cable. Assembledfeedback cables areavailable for all regions.
Motor choke, for motor cables longer than 25 m
CAN termination connector (with CAN drives only)
Service cable to the network
Power cableand control cables (as cutoff lengths)
6.2 Nameplate
The nameplate depicted below is attachedto the side of the drive, sample data entries are for
a 12A type.
24 Kollmorgen™ | kdn.kollmorgen.com | March 2017

6.3 Part Number Scheme
The part number is identical to the order code.
KC1 InstallationManual | 6 Package
Customization: this codeincludes customer specials.
Kollmorgen™ | kdn.kollmorgen.com | March 2017 25
KC1 InstallationManual | 7 Technical description and data
7 Technical description and data
7.1 The KC1 Family of Digital Drives 27
7.2 Ambient Conditions, Ventilation, and Mounting Position 28
7.3 Mechanical Data 28
7.4 Inputs/Outputs 29
7.5 Electrical Data KC1-xzzz06 30
7.6 Performance Data 31
7.7 Recommended Tightening Torques 31
7.8 Fusing 32
7.9 Grounding System 32
7.10 Connectors 33
7.11 Cable and Wire Requirements 34
7.12 Dynamic Braking 35
7.13 Switch-On and Switch-Off Behavior 37
7.14 Stop / Emergency Stop / Emergency Off 44
7.15 Safe Torque Off (STO) 45
7.16 Shock-hazard Protection 51
26 Kollmorgen™ | kdn.kollmorgen.com | March 2017
7.1 The KC1 Family of Digital Drives
Available KC1 versions
KC1 InstallationManual | 7 Technical description and data
Variant (short) Output
Current
KC1-x*** 1.5 to 24 A Base drive is controlled by
Standard features
Supply voltagerange 120V to 240 V ±10%
Several housing dimensions, dependingon current and hardwareoptions.
TCP/IP service channel onboard.
SFD, Tamagawa Smart Abs, Comcoder, incremental encoders support onboard.
Support for ENDAT 2.2, BiSS C protocols onboard.
Encoder emulation onboard.
Secondfeedback support.
Safe TorqueOff (STO) accordingto IEC 62061 SIL 2 onboard.
Use with synchronous servomotors, linear motors, and induction machines.
Power section
Oneor three phase supply for KC1-x00106 to KC1-x01206, and three phase supply only
for KC1-x02406, voltage range120 to 240 V ±10%, 50 to 400 Hz ±5% or DC.
Connection to higher voltage mains only via isolating transformer, (➜ # 70)
B6 bridge rectifier, integral soft-start circuit.
Single phase supply possible for KC1-x00106 to KC1-x01206 with output power derating.
Fusing to be provided by the user.
Shielding star point close to the drive.
DC bus link voltage range170 to 340 VDC, can be connected in parallel.
Output stageIGBT module with floating current measurement.
Regencircuit with dynamic distribution of the generated power between several drives on
the same
DC bus link circuit.
Internal regenresistor for KC1-x01206 and KC1-x02406models (KC1-x00106to KC1x00606 models lack internal regen resistors), external regen resistors if required.
Description Housing Connectivity
Standard Analog, optional
analog torque and velocity
commands (electronic gearing).
CANopen
Integrated safety
Appropriate insulation/creepagedistances andelectrical isolationfor safe electrical separation, perIEC 61800-5-1, between the power input/motor connections and the signal
electronics.
Soft-start, overvoltagedetection, short-circuit protection, phase-failure monitoring.
Temperature monitoringof the drive and motor.
Motor overload protection: foldback mechanism
SIL 2 safe torque off in accordance with IEC 62061 , (➜ # 45).
Auxiliary supply voltage 24V DC
From an external, safety approved 24 V ±10% power supply.
Operation and parameter setting
Using the setup softwareWorkBench, or Pendant, for setup via TCP/IP.
Kollmorgen™ | kdn.kollmorgen.com | March 2017 27
KC1 InstallationManual | 7 Technical description and data
Full digital control
Digital current controller (670 ns)
Adjustabledigital velocity controller (62.5 µs)
Software option position controller (125 µs)
Inputs/Outputs
1 programmable analog input (➜ # 101)
1 programmable analog output (➜ # 102)
7 programmable digital inputs (➜ # 103)
2 programmable digital outputs (➜ # 106)
1 Enable input (➜ # 103)
1 STO input (➜ # 45)
Connectivity
Analog +/- 10 V control with encoder feedback output.
Onboard Ethernet Interface, optional CANopen (➜ # 111)
7.2 Ambient Conditions, Ventilation, and Mounting Position
Storage (➜ # 18)
Transport (➜ # 18)
Surrounding air temperature in operation
Humidity in operation Relative humidity 5 to 85%, no condensation, class 3K3
Site altitude Up to 1000 meters above meansea level without restriction
Pollution level Pollution level 2 as per IEC 60664-1
Vibrations Class 3M1 according to IEC 60721-3-3
Enclosure protection IP 20 according to IEC 60529
Mounting position Vertical, (➜ # 54)
Ventilation Built-in fan (except KC1-x00306 type)
0 to +40 °C under rated conditions
+40 to +55 °C with continuous current derating4 % per Kelvin
1,000 to max. 2,500 meters above mean sea level with power
derating1.5%/100 m
The drive shuts down (fault F234, (➜ # 122), motorhas no
torque)in case of excessively high temperature in the control cabinet. Make sure sufficient forced ventilationis supplied within the
control cabinet.
7.3 Mechanical Data
Mechanical data Units KC1-x00106 to 00606 KC1-x01206 KC1-x02406
Weight (standard width) kg 1.1 2 3.7
Height, without connectors mm 168 196 248
Height, with connector mm 200 225 280
Standard Width front/back mm 54/59 72/78.4 96/100
Depth, without connectors mm 156 187 228
Depth, with connectors mm 185 < 215 <265
28 Kollmorgen™ | kdn.kollmorgen.com | March 2017
7.4 Inputs/Outputs
Interface Electrical Data
Analog inputs ±12 VDC
Analog outputs ±10 VDC
Digital inputs ON: 3.5 VDC to 30 VDC, 2 mA to 15 mA
Digital outputs max. 30 VDC, 100mA
Relay outputs max. 30 VDC, 1A
KC1 InstallationManual | 7 Technical description and data
Common Mode Rejection Ratio: > 30 dB at 60 Hz
resolution 16bit and full monotonic
update rate: 16 kHz
nonlinearity < 0.1% of full scale
offset drift max. 250µV/°C
input impedance > 13 kOhms
max 20mA
resolution 16bit and full monotonic
update rate: 4 kHz
nonlinearity < 0.1% of full scale
offset drift max. 250µV/°C
short circuit protected to AGND
output impedance 110 Ohms
OFF: -2 VDC to 2 VDC, max.15 mA
galvanic isolation for 250 VDC
short circuit proof
galvanic isolation for 250 VDC
max. 42 VAC, 1 A
time open/close 10ms
isolation 400 VDC contact/coil
Kollmorgen™ | kdn.kollmorgen.com | March 2017 29
KC1 InstallationManual | 7 Technical description and data
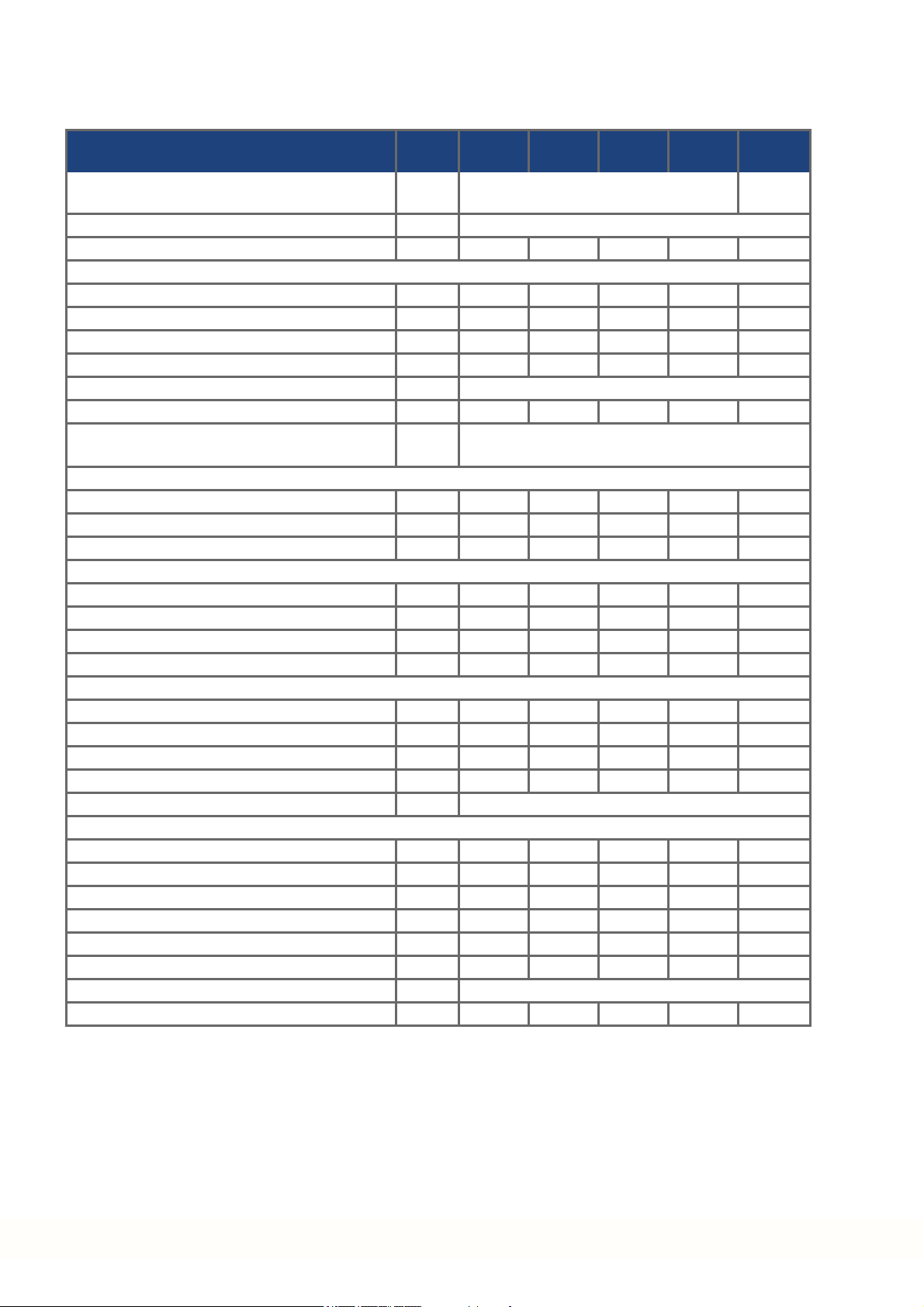
7.5 Electrical Data KC1-xzzz06
Electrical Data Units
Rated supply voltage V
Rated supply input frequency Hz 50 Hz to 400Hz ±5% or DC
Rated input power for S1 operation kVA 0.6 1.2 2.38 3.82 7.6
Rated input current
at 1x120 V A 2.7 5.0 9.9 12 N/A
at 1x240 V A 2.7 5.0 9.9 12 N/A
at 3x120 V A 1.2 2.3 4.6 9.2 N/A
at 3x240 V A 1.2 2.3 4.6 9.2 18.3
Permitted switch on/off frequency 1/h 30
Max. inrush current A 10 10 10 10 20
Rated DC bus link voltage
(Bus Turn on Delay 3ph1 sec)
Continuous output current (± 3%)
at 120 V Arms 1.5 3 6 12 N/A
at 240 V Arms 1.5 3 6 12 24
Peak output current (for 5 s, ± 3%) Arms 4.5 9 18 30 48
Continuous output power @ rated input current
at 1x120 V W 160 312.5 625 1250 N/A
at 1x240 V W 320 625 1250 2500 N/A
at 3x120 V W 160 312.5 625 1250 N/A
at 3x240 V W 320 625 1250 2500 5000
Peak output power (for 1 s)
at 1x120 V kVA 0.47 0.937 1.875 3.125 N/A
at 1x240 V kVA 0.94 1.875 3.750 6.250 N/A
at 3x120 V kVA 0.47 0.937 1.875 3.125 N/A
at 3x240 V kVA 0.94 1.875 3.750 6.250 10
Technical data for regen circuit — (➜ # 35)
Motor inductance min.
at 120 V mH 1.3 1.3 0.6 0.5 0.3
at 240 V mH 2.5 2.5 1.3 1 0.6
Motor inductance max. mH 250 250 125 100 60
Thermal dissipation, output stage disable W max. 20 max. 20 max. 20 max. 20 max. 25
Thermal dissipation at rated current W 18 31 57 137 175
Noise emission (low speed/high speed fan) dB(A) N/A N/A 33/39 37/43 41/56
Aux. voltagesupply V 24 V (±10%, check voltage drop)
- current without/with motor brake A 0.5 / 1.7 0.5 / 1.7 0.6 / 1.8 0.7 / 1.9 1.0 / 2.5
V 170to 340
KC1-
x00106
KC1-
x00306
3 x 120 V to 240 V ±10%
1 x 120 V to 240 V ±10%
KC1-
x00606
KC1-
x01206
KC1-
x02406
3x240 V
±10%
30 Kollmorgen™ | kdn.kollmorgen.com | March 2017
 Loading...
Loading...