

Page 1
Page 2

Page 3
MDC-5000 Series Revision History
No.
Doc. No.-Rev. No.
Date Revised
(Y/M/D)
Revised Content
0
0092653004-00
2017/12/22
First edition
1
2 3 4 5 6
7
8 9
10
MDC-5000 Series Installation Manual
Doc No: 0092653004
Document Revision History
Document No. Revised Version Norm
When part of the document needs to be revised, the document has advanced revision number.
The document No. is indicated at the lower right side on the cover and at the left or right side of the
footer region of each page.
© 2017 Koden Electronics Co., Ltd. All rights reserved.
No part of this publication may be reproduced, transmitted, translated in any from by any means
without the written permission of Koden Electronics Co., Ltd. The technical descriptions contained in
this publication are subject to change without notice. Koden assumes no responsibility for any errors,
incidental or consequential damages caused by misinterpretation of the descriptions contained in this
publication.
0092653004-00 i
Page 4

A table of content MDC-5000 Series
A table of content
Document Revision History ...................................................................................................................... i
A table of content ...................................................................................................................................... ii
Preface..................................................................................................................................................... 1
Precaution for operation ........................................................................................................................ 1
• Caution about rotating antenna: ......................................................................................................... 1
• Caution about health risks caused by radio wave: ............................................................................. 1
• Caution about dangerous internal high voltage in the device: ............................................................ 1
Precautions for maintenance ................................................................................................................ 2
• Caution against residual high voltage: ................................................................................................ 2
• Keep inboard power source “Off”: ....................................................................................................... 2
• Caution against the dust: .................................................................................................................... 2
• Measures against static electricity: ..................................................................................................... 2
• Prohibited matter: ................................................................................................................................ 2
• Break in procedure of stored radar: .................................................................................................... 2
Chapter 1 Prior to installation ................................................................................... 1-1
1.1 Installation precautions ................................................................................................................ 1-1
1.2 Unpacking of components............................................................................................................ 1-1
1.3 Appearance verification of each unit and accessories ................................................................. 1-1
1.4 Selection of location for installation .............................................................................................. 1-1
1.4.1 Antenna Scanner unit ....................................................................................................... 1-2
1.4.2 Processor unit and Operation unit .................................................................................... 1-3
1.5 Cable wiring and interconnection ................................................................................................. 1-4
1.5.1 Antenna Scanner unit ....................................................................................................... 1-4
1.5.2 Processor unit ................................................................................................................... 1-4
Chapter 2 System configurations .......................................................................... 2-1
2.1 Standard configuration list............................................................................................................ 2-1
2.2 Spare parts list ............................................................................................................................. 2-2
2.3 Installation material list ................................................................................................................. 2-2
2.4 Option list ..................................................................................................................................... 2-3
2.5 MDC-5004/5006/5012/5025 series system configuration ............................................................ 2-4
Chapter 3 Installation method .................................................................................. 3-1
3.1 How to install the Antenna Scanner unit ...................................................................................... 3-1
3.1.1 Installation of the Antenna Scanner unit ........................................................................... 3-3
3.1.2 Mounting the Antenna ....................................................................................................... 3-4
3.1.3 Installation of the connecting cable 242J159098x-xxM .................................................... 3-5
3.1.3.1 Scanner unit 4kW (RB806) ........................................................................................ 3-5
3.1.4 Installation of the connecting cable CW-845-xxM ............................................................ 3-6
ii 0092653004-00
Page 5

MDC-5000 Series A table of content
3.1.4.1 Scanner unit 6kW (RB807) ........................................................................................ 3-6
3.1.4.2 Scanner unit 12kW (RB808) .................................................................................... 3-12
3.1.4.3 Scanner unit 25kW (RB809) .................................................................................... 3-18
3.2 Interconnection diagram of cable............................................................................................... 3-24
3.2.1 242J159098 (MDC-5004) ................................................................................................ 3-24
3.2.2 CW-845 (MDC-5006/5012/5025) .................................................................................... 3-25
3.3 Installation of the Processor unit and Operation unit ................................................................. 3-26
3.3.1 Installation of Processor unit .......................................................................................... 3-27
3.3.2 Installation of Operation unit ........................................................................................... 3-28
3.3.2.1 Flush mounting for Operation unit ........................................................................... 3-30
3.4 Cable connection to a Processor unit ........................................................................................ 3-31
3.4.1 Cable connection for MRM-110 ...................................................................................... 3-31
3.4.2 Connecting an External monitor ..................................................................................... 3-32
3.4.3 Connecting a VDR or External monitor & Failure alarm output ..................................... 3-32
3.4.4 Cable connection for NMEA input/output signals ........................................................... 3-33
3.4.5 AIS cable connection ...................................................................................................... 3-34
3.4.6 Cable connection for inter-switch ................................................................................... 3-35
3.4.6.1 Cable connection instructions for cross-over, dual and independent connection ... 3-35
3.4.6.2 Cable connection for slave display used as a monitor ............................................ 3-36
Chapter 4 Setup after installation ............................................................................ 4-1
4.1 STARTUP menu .......................................................................................................................... 4-2
4.1.1 Tune adjustment (TUNE) ................................................................................................. 4-2
4.1.2 Heading adjustment (HL OFFSET) .................................................................................. 4-2
4.1.3 Transmitting delay time adjustment (TX DELAY) ............................................................. 4-3
4.1.4 Antenna height (ANT HEIGHT) ........................................................................................ 4-4
4.1.5 Antenna cable length (ANT CABLE) ................................................................................ 4-4
4.1.6 Main Bang Suppression (MBS) ........................................................................................ 4-4
4.1.7 Setup SEA (STC) curve.................................................................................................... 4-5
4.1.8 Function key usage .......................................................................................................... 4-6
4.1.9 RANGE ENABLE .............................................................................................................. 4-7
4.1.10 MOTOR HIGH SPEED ................................................................................................. 4-10
4.1.11 MOUSE SPEED ........................................................................................................... 4-10
4.1.12 TX HOUR DISP ............................................................................................................ 4-10
4.2 Setup I/O Interface ..................................................................................................................... 4-11
4.2.1 Setup TIME ..................................................................................................................... 4-12
4.2.2 How to use without NMEA input connection .................................................................. 4-13
4.2.3 Set up Heading interfaces .............................................................................................. 4-14
4.2.3.1 Connection of KODEN GPS compass ..................................................................... 4-14
0092653004-00 iii
Page 6

A table of content MDC-5000 Series
4.2.3.2 Connection of other device ...................................................................................... 4-14
4.2.3.3 How to input the heading value by manual .............................................................. 4-15
4.2.3.4 Compensation of angle of ship’s bearing ................................................................. 4-15
4.2.4 Setting of STW to be used for SEA STAB ...................................................................... 4-15
4.2.4.1 How to input the STW value by manual ................................................................... 4-16
4.2.5 Setting of COG/SOG to be used for GROUND STAB .................................................... 4-16
4.2.5.1 How to input the COG value by manual ................................................................... 4-16
4.2.5.2 How to input the SOG value by manual ................................................................... 4-16
4.2.6 Setting of SET/DRIFT to be used for CURRENT mode ................................................. 4-17
4.2.6.1 How to input the SET/DRIFT value by manual ........................................................ 4-17
4.2.7 Setting of latitude and longitude (POSITION) ................................................................. 4-17
4.2.7.1 How to input the POSITION value by manual.......................................................... 4-17
4.2.7.2 Compensation of POSITION data ............................................................................ 4-18
4.2.7.3 How to input the compensation of position data by manual .................................... 4-18
4.2.8 Setting of serial output .................................................................................................... 4-19
4.2.8.1 Setting of TLL output ................................................................................................ 4-20
4.2.9 Limiting of type of signal to input port ............................................................................. 4-20
4.2.10 Changing baud-rate of input/output ports of navigation devices. ................................. 4-21
4.2.10.1 Setting all I/O ports automatically .......................................................................... 4-21
4.2.11 Setup KGC (GPS compass) ......................................................................................... 4-21
4.2.12 Serial monitor ................................................................................................................ 4-22
4.3 Setup SECTOR MUTE mode (Cannot use while transmitting).................................................. 4-22
4.4 Setup PRESET .......................................................................................................................... 4-23
4.4.1 Setup RAIN MIN and MAX mode ................................................................................... 4-23
4.4.1.1 RAIN MIN (MAN and CFAR mode) .......................................................................... 4-23
4.4.1.2 RAIN MAX (MAN and CFAR mode) ........................................................................ 4-24
4.4.2 Setup SEA MIN and MAX mode ..................................................................................... 4-24
4.4.2.1 SEA MIN (MAN and AUTO mode) ........................................................................... 4-25
4.4.2.2 SEA MAX (MAN and AUTO mode) .......................................................................... 4-26
4.4.3 Setup GAIN MIN and MAX mode ................................................................................... 4-27
4.4.3.1 GAIN MIN (MAN and AUTO mode) ......................................................................... 4-27
4.4.3.2 GAIN MAX (MAN and AUTO mode) ........................................................................ 4-28
4.4.4 Setup GAIN OFFSET mode ........................................................................................... 4-29
4.4.5 Setup SEA OFFSET mode ............................................................................................. 4-29
4.5 SAVE and LOAD of Setup data / MAP (Cannot be used while transmitting) ............................ 4-29
4.5.1 Internal save of setup data ............................................................................................. 4-30
4.5.2 External save of setup and map data (Cannot be performed while transmitting) .......... 4-30
4.5.3 Parameter reset .............................................................................................................. 4-31
iv 0092653004-00
Page 7

MDC-5000 Series A table of content
4.5.4 MAP, Target Track and Past Position reset ................................................................... 4-31
4.6 TOTAL Hour and TX Hour (Cannot use while transmitting) ...................................................... 4-31
4.7 MENU Setup .............................................................................................................................. 4-31
4.8 Version confirmation .................................................................................................................. 4-32
4.9 How to update the system program ........................................................................................... 4-32
4.10 Setup VECTOR on tracked targets ......................................................................................... 4-33
Chapter 5 Troubleshooting and on board repair ...................................................... 5-1
5.1 Necessary information at the time of repair request .................................................................... 5-1
5.2 Provided self diagnostic facilities ................................................................................................. 5-1
5.2.1 Alarm display and how to cancel ...................................................................................... 5-1
5.2.1.1 Alarm display list ........................................................................................................ 5-2
5.2.1.2 Operation note display ............................................................................................... 5-6
5.3 Malfunction diagnostics ............................................................................................................... 5-8
5.3.1 Malfunction detection step ................................................................................................ 5-8
5.3.2 Malfunction diagnostics flow chart .................................................................................... 5-9
5.3.2.1 Initial malfunction diagnostics .................................................................................... 5-9
5.3.2.2 Cannot turn on the power ........................................................................................ 5-10
5.3.2.3 No response from the antenna unit ......................................................................... 5-11
5.3.2.4 Operation unit error .................................................................................................. 5-12
5.3.2.5 No radar echo .......................................................................................................... 5-13
5.3.2.6 Weak sensitivity of the radar echo ........................................................................... 5-14
5.3.2.7 Data such as heading, speed, latitude/longitude cannot be received ..................... 5-15
5.3.2.8 AIS ........................................................................................................................... 5-16
5.3.2.9 Antenna unit failure .................................................................................................. 5-17
5.4 On board repair .......................................................................................................................... 5-24
5.4.1 Replacement of fuse....................................................................................................... 5-24
5.4.2 Replacement of Internal Battery ..................................................................................... 5-25
Chapter 6 Maintenance ........................................................................................... 6-1
6.1 List of parts that have longevity ................................................................................................... 6-1
6.2 Regular service and cleaning up ................................................................................................. 6-2
6.2.1 Monthly inspection ............................................................................................................ 6-2
6.2.2 Annual inspection ............................................................................................................. 6-2
6.3 Method of exchanging the magnetron ......................................................................................... 6-4
6.3.1 Magnetron replacement (RB806) ..................................................................................... 6-4
6.3.2 Magnetron replacement (RB808 and RB807) .................................................................. 6-8
6.3.3 Magnetron replacement (RB809) ................................................................................... 6-12
Chapter 7 Input/output data ..................................................................................... 7-1
7.1 Details of the data input format .................................................................................................... 7-1
0092653004-00 v
Page 8

A table of content MDC-5000 Series
7.2 Details of TT tracking data output .............................................................................................. 7-11
7.3 Details of the radar data output .................................................................................................. 7-12
7.4 Interface specification ................................................................................................................ 7-15
7.4.1 J3, J5 and J6 serial data input/output specification ........................................................ 7-15
7.4.2 VDR (external monitor) and Alarm output signal specification ....................................... 7-16
7.4.2.1 Circuit for horizontal sync, vertical sync signal output ............................................. 7-16
7.4.2.2 Circuit for R, G, B video signal ................................................................................. 7-16
7.4.2.3 Alarm contact specification ...................................................................................... 7-17
7.4.3 AIS serial data input/output specification ........................................................................ 7-17
7.4.5 Radar input/output signal specification ........................................................................... 7-18
7.4.6 Talker device code of the data output devices ............................................................... 7-19
7.4.7 Priority of talker device code ........................................................................................... 7-19
INTER CONNECTION DIAGRAM (RB806) ......................................................................................A-1
INTER CONNECTION DIAGRAM (RB807) ......................................................................................A-2
INTER CONNECTION DIAGRAM (RB808) ......................................................................................A-3
INTER CONNECTION DIAGRAM (RB809) ......................................................................................A-4
INTER CONNECTION DIAGRAM (MRM-110/MRO-110) .................................................................A-5
vi 0092653004-00
Page 9
MDC-5000 Series Preface
Transmission power / antenna
length
100 W/m2
50W/m2
10 W/m2
4 kW / 3 feet antenna
0.9 m
1.3 m
2.8 m
4 kW / 4 feet antenna
1.0 m
1.4 m
3.1 m
4 kW / 6 feet antenna
1.2 m
1.7 m
3.7 m
6 kW / 4 feet antenna
1.5 m
2.1 m
4.5 m
6 kW / 6 feet antenna
1.7 m
2.4 m
5.4 m
12 kW / 4 feet antenna
2.1 m
2.9 m
6.4 m
12 kW / 6 feet antenna
2.4 m
3.4 m
7.6 m
12 kW / 9 feet antenna
2.9 m
4.1 m
9.0 m
25 kW / 4 feet antenna
2.9 m
4.1 m
9.2 m
25 kW / 6 feet antenna
3.5 m
4.9 m
10.9 m
25 kW / 9 feet antenna
4.1 m
5.8 m
13.0 m
Preface
[Precaution for safety issues]
Precaution for operation
• Caution about rotating antenna:
The radar antenna may start rotating without notice. Please keep away from the antenna for your
safety.
• Caution about health risks caused by radio wave:
Powerful electromagnetic waves are emitted from the antenna during operation. These waves can
cause ill effects on human bodies when exposed to continuous radiation.
International criteria
Though the international regulation states that the electromagnetic waves with a high-frequency
power density of not more than 100 W/m2 do not have an ill effect on human bodies, medical
devices such as a pace makers are sensitive to electromagnetic waves with minute electric power
and their operation may become unstable. In any event, any person with such a device must keep
away from electromagnetic sources.
Specified power density and distance from antennas (according to the
provision as specified in IEC 60945)
• Caution about dangerous internal high voltage in the device:
High voltage that may cause risk of life is present in the Antenna unit and the Processor unit of this
radar. This high voltage can remain in the circuit after the switch has been turned off. The high-voltage
circuit has a protective cover with a label “Caution against high voltage” so that no one will accidentally
touch it. Please ensure for your safety that the power switch is turned off and residual voltage in the
0092653004-00 1
Page 10

Preface MDC-5000 Series
capacitor is discharged in a suitable manner when checking the inside of the antenna. Maintenance
and inspection should be conducted by qualified engineers only.
Precautions for maintenance
• Caution against residual high voltage:
Capacitors used in the Processor unit and the modulator circuit of the transmission unit may keep high
voltage for several minutes even after turning off power. The maintenance and inspection of this part
should be performed at least 5 minutes after powering off or applying the appropriate measure to
discharge the residual electrical charge.
• Keep inboard power source “Off”:
An electric shock is possible if the power switch is accidentally turned on during the maintenance
operation. In order to prevent such an occurrence, please ensure to disconnect the power breaker of
the onboard power source and the device. Furthermore, it is recommended to post the word-of-caution
tag shown to be in a "working state" near the power switch of the device.
• Caution against the dust:
Dust can temporarily cause distress to the respiratory system. Take care not to inhale dust when
cleaning the interior of the device. It is recommended you wear a safety mask.
• Measures against static electricity:
Static electricity occurring from carpet on the floor of the cabin, clothes made of synthetic fiber etc., may
damage some electronic parts on the printed circuit board. Please work on the printed circuit board only
after taking measures against static electricity.
• Prohibited matter:
Any Processor unit and Scanner unit combination other than specified in the manual is prohibited and
will void manufacturer’s warranty.
• Break in procedure of stored radar:
Following procedure is recommended for “Break In” of the stored radar.
Otherwise the radar sometimes exhibits unstable transmitting operation such as arcing at its initial
operation after long period of storage and make the operation more difficult.
1. Extend preheat time as long as possible (preferably 20 to 30 minutes).
2. Set the pulse width to the shortest one and start the operation.
When the operation in the shortest pulse is stable then go to operation in longer pulse and repeat
the similar step until the operation reaches to the final pulse condition.
2 0092653004-00
Page 11

MDC-5000 Series Chapter 1 Prior to installation
Chapter 1 Prior to installation
1.1 Installation precautions
In order to obtain the maximum performance of radar systems, this radar system should be installed by
qualified engineers in charge of installation and maintenance. Installation procedures include the
following:
(1) Unpacking of components;
(2) Inspection of composition units, spare parts, accessories and installation materials;
(3) Checking of supply voltage and current capacity;
(4) Selection of the location for installation;
(5) Installation of the Antenna-Scanner unit;
(6) Installation of the Processor unit;
(7) Attachment of accessories;
(8) Planning and implementation of cable laying and connection;
(9) Coordination after installation.
1.2 Unpacking of components
Unpack components and check that all items correspond with the description of the packing list. When
a discrepancy or damage has been found, please contact the transportation/insurance firm, and follow
procedures for searching for loss items and claim of expense.
1.3 Appearance verification of each unit and accessories
Please check the appearance of each unit carefully, confirm that they are dent and crack free.
Moreover, please also check the interior of each unit and confirm that there is no electric or mechanical
damage.
1.4 Selection of location for installation
In order to obtain the maximum performance of the units, it is necessary to install them in consideration
of matters as described below.
0092653004-00 1-1
Page 12
Chapter 1 Prior to installation MDC-5000 Series
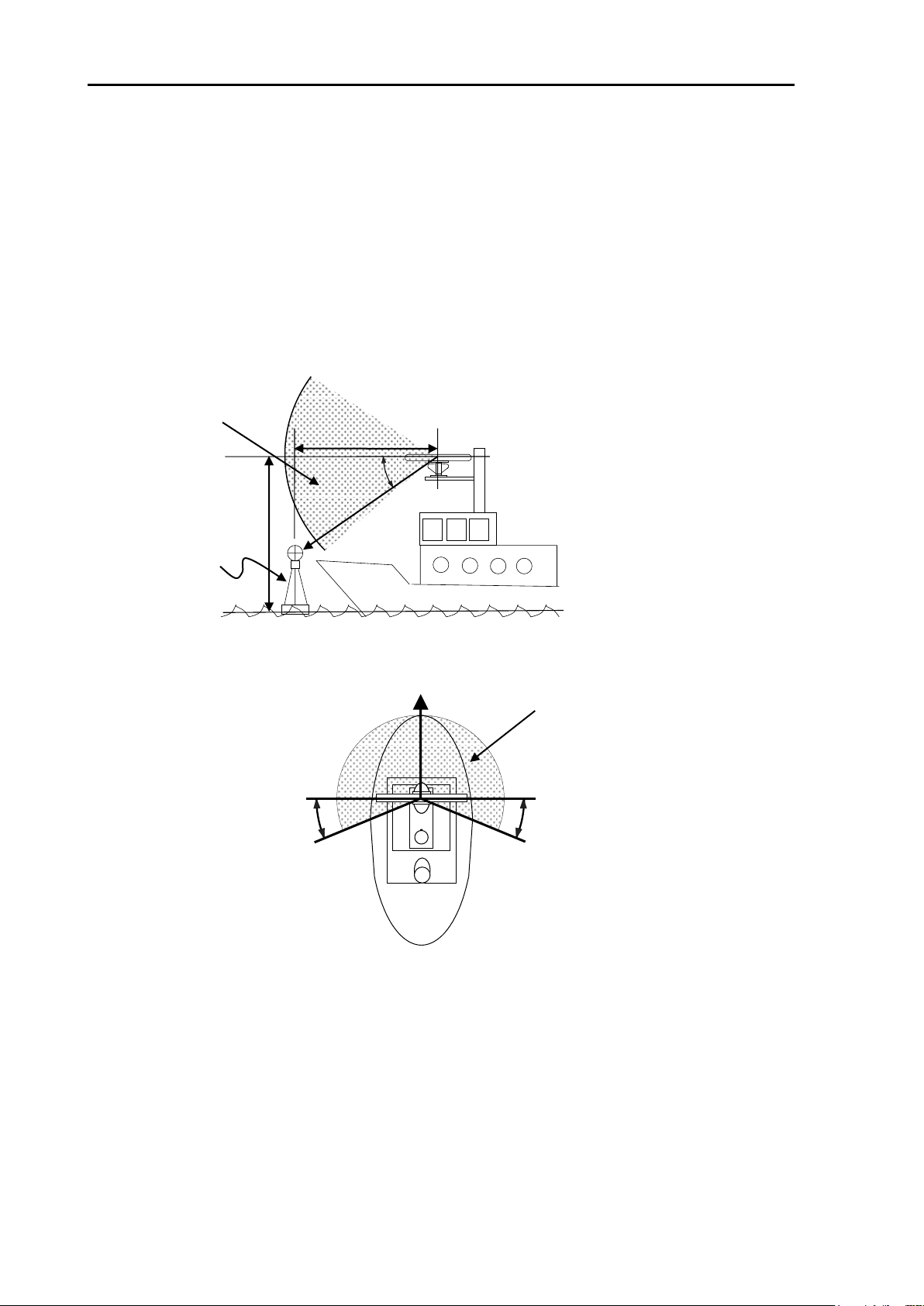
=15m
40m
16°
Antenna
height
Minimum range
Navigation buoy with
corner reflector
When the antenna height
rises, Minimum Range
becomes long.
Minimum
range(m)
Antenna
height(m)
=(
Main
This area is prohibited from
setting up of the structure.
Figure 1.1 Vertical chart of recommended antenna installation position.
BOW
22.5°
22.5°
This area is prohibited from setting
up of the structure.
Figure 1.2 Horizontal chart of recommended antenna installation position.
1.4.1 Antenna Scanner unit
(1) Blind sectors shall be kept to a minimum, and shall not be placed in an arc of the horizon from the
right ahead direction to 22.5° abaft the beam and especially shall avoid the right ahead direction
(relative bearing 000°). The installation of the antenna shall be in such a manner that the
performance of the radar system is not substantially degraded. The antenna shall be mounted
clear of any structure that may cause signal reflections, including other antenna and deck structure
or cargo. In addition, the height of the antenna shall take account of target detection performance
relating to range of first detection and target visibility in sea clutter.
(2) Keep the surface of the Antenna-Scanner unit platform horizontal as much as possible.
(3) The Antenna-Scanner unit should be installed in front of large objects or exhaust stack to prevent a
blind sector or the effects on the antenna by engine exhaust soot.
(4) Keep sufficient maintenance area.
(5) Keep safety distance from magnetic compass.
1-2 0092653004-00
Page 13
MDC-5000 Series Chapter 1 Prior to installation
Scanner unit type
Standard compass
Steering compass
RB806 (4kW)
2.0 m
1.4 m
RB807 (6kW)
1.2 m
0.8 m
RB808 (12kW)
1.4 m
0.9 m
RB809 (25kW)
1.4 m
0.9 m
Unit type
Standard compass
Steering compass
MRM-110
1.2 m
0.7 m
MRO-110
1.2 m
0.8 m
Table 1.1 Safety distance of compass from the Scanner unit
1.4.2 Processor unit and Operation unit
(1) The orientation of the Monitor display shall be such that the user is looking ahead, the lookout view
is not obscured and there is minimum ambient light on the display viewing surface.
(2) Choose the best location from humidity, spray, rain, and direct sunlight.
(3) Keep sufficient maintenance area. Especially sufficient space is required near the back panel
where cables are connected.
(4) Keep as far as possible from other radio devices.
(5) Keep safety distance from magnetic compass.
Table 1.2 Safety distance of compass from units
0092653004-00 1-3
Page 14

Chapter 1 Prior to installation MDC-5000 Series
1.5 Cable wiring and interconnection
1.5.1 Antenna Scanner unit
(1) The connecting cable between the Antenna-Scanner unit and the Processor unit should run apart
from any other radio antenna cable or power cables of the other devices. Do not lay the radar cable
in parallel to the sea surface together with other cables. These considerations are effective to
prevent random radio interference between systems. When these measures cannot be applied
because of space limitations, use metal pipes for each cable or other suitable ways to shield.
(2) In order to maximize the performance of the radar, the antenna cable and the power cable should
be as short as possible, and should be laid within the nominal length.
(3) Connect the shielded braided wire of the antenna cable to the grounding terminal inside the
Antenna unit
1.5.2 Processor unit
(1) Ground the braided wire of a cable firmly with the cable clamp fixing screw to the back panel.
(2) The Processor unit housing should be grounded to the ship ground by using the ground terminal of
the back panel.
1-4 0092653004-00
Page 15
MDC-5000 Series Chapter 2 System configurations
No.
Name
Type
Comment
Weight/
Length
Quantity
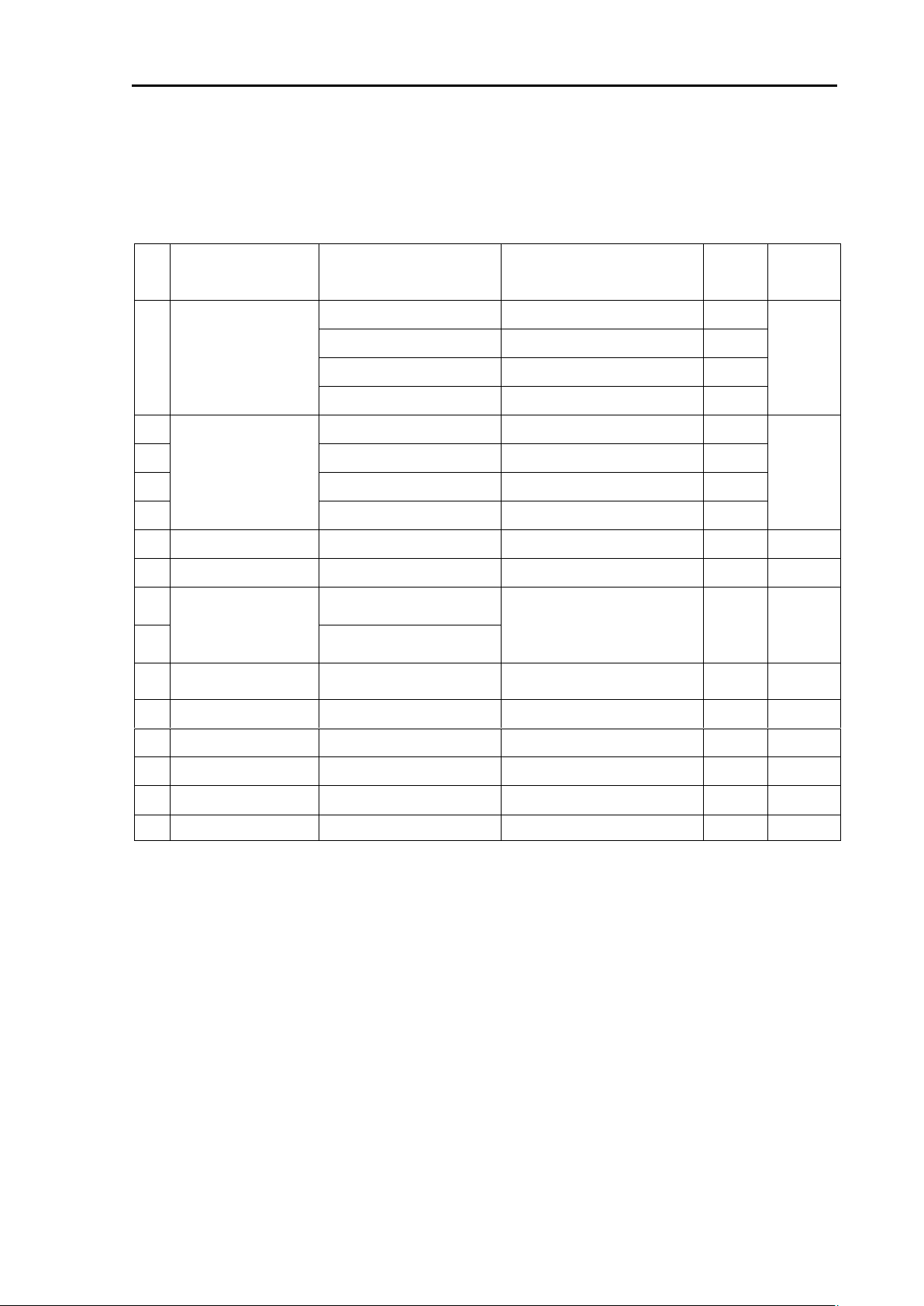
1
Antenna
RW701A-03
3 ft
5 kg
1
RW701A-04
4 ft
6 kg
RW701A-06
6 ft
8 kg
RW701B-09
9 ft
12 kg
2-1
Scanner unit
RB806 (For MDC-5004)
4 kW
16.1 kg
1
2-2
RB807 (For MDC-5006)
6 kW
18.1 kg
2-3
RB808 (For MDC-5012)
12 kW
18.0 kg
2-4
RB809 (For MDC-5025)
25 kW
20.0 kg
3
Processor unit
MRM-110
5.1 kg
1 4 Operation unit
MRO-110
With CW-401-2M
2 kg
1
5-1
Connecting cable
242159098B-15M
(For MDC-5004)
With connectors on the both
sides
15 m
1
5-2
CW-845-15M
(For MDC-5006/5012/5025)
6
Power cable
CW-259-2M
With a connector on the
single side
2 m
1
7
Spare parts
SP-MRM-110
See spare parts list
1 set
8
Installation material
M12-BOLT.KIT
See installation material list
1 set
9
Document
MDC-5000.OM.E
Operation manual
1 10
Document
MDC-5000.IM.E
Installation manual
1
11
Document
MDC-5000.QR.E
Quick reference
1
1
-
Chapter 2 System configurations
2.1 Standard configuration list
MDC-7504/7506/7512/7525
0092653004-00 2-1
Page 16
Chapter 2 System configurations MDC-5000 Series
No.
Name
Specification
Comment
Type
(Dimension)
Quantity
Usage
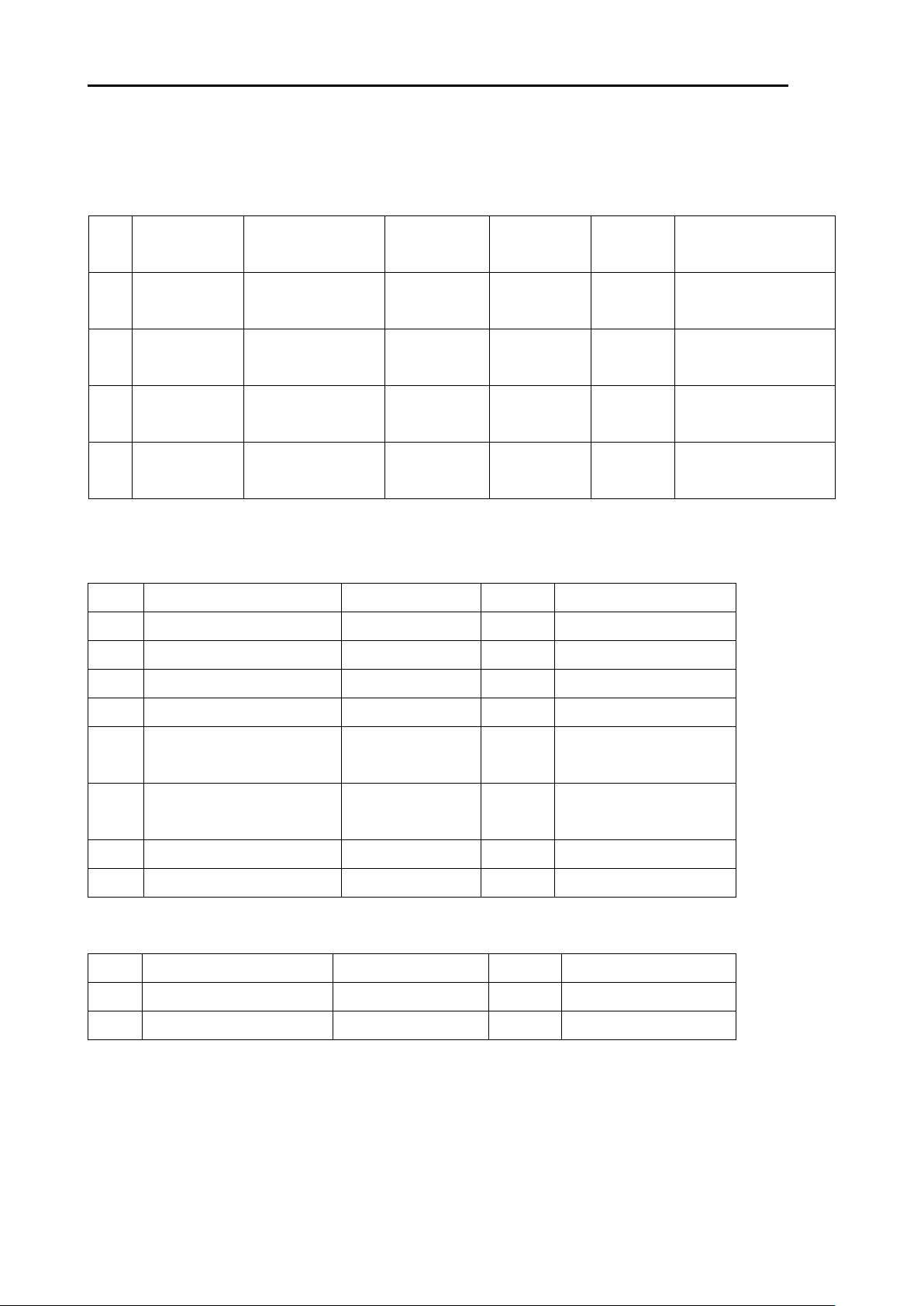
1
Fuse
F-1065-15A
Normal type
Tubular
(φ6.4 x 30)
1
Main power
2
Fuse
MF51NN250V5A/
N20-250V
Normal type
Tubular
(φ5.2 x 20)
1
Motor power
3
Fuse
FGMB 250V/0.8A
Normal type
Tubular
(φ5.2 x 20)
1
High voltage power
supply
4
Carbon brush
24Z125209B
1set
Antenna motor
(For RB806/RB807)
No.
Name
Specification
Quantity
Usage
1
Hexagon bolt
B12X55U
4
Antenna-Scanner unit
2
Nut
N12U
8
Antenna-Scanner unit
3
Plain washer
2W12U
8
Antenna-Scanner unit
4
Spring washer
SW12U
4
Antenna-Scanner unit
5
Anti electro corrosive
washer
56R7201M2
4
Antenna-Scanner unit
6
Anti electro corrosive
washer
56R7202M2
4
Antenna-Scanner unit
7
Ferrite core
GRFC-13
1
Antenna-Scanner unit
8
Cable band
AB150-W
2
Antenna-Scanner unit
No.
Name
Specification
Quantity
Usage
1
Connector
BD-06BFFA-LL6001
2
NMEA signal I/O
2
Connector
BD-08BFFA-LL6001
1
AIS
2.2 Spare parts list
SP-MRM-110
2.3 Installation material list
M12-BOLT.KIT
Connector KIT
2-2 0092653004-00
Page 17
MDC-5000 Series Chapter 2 System configurations
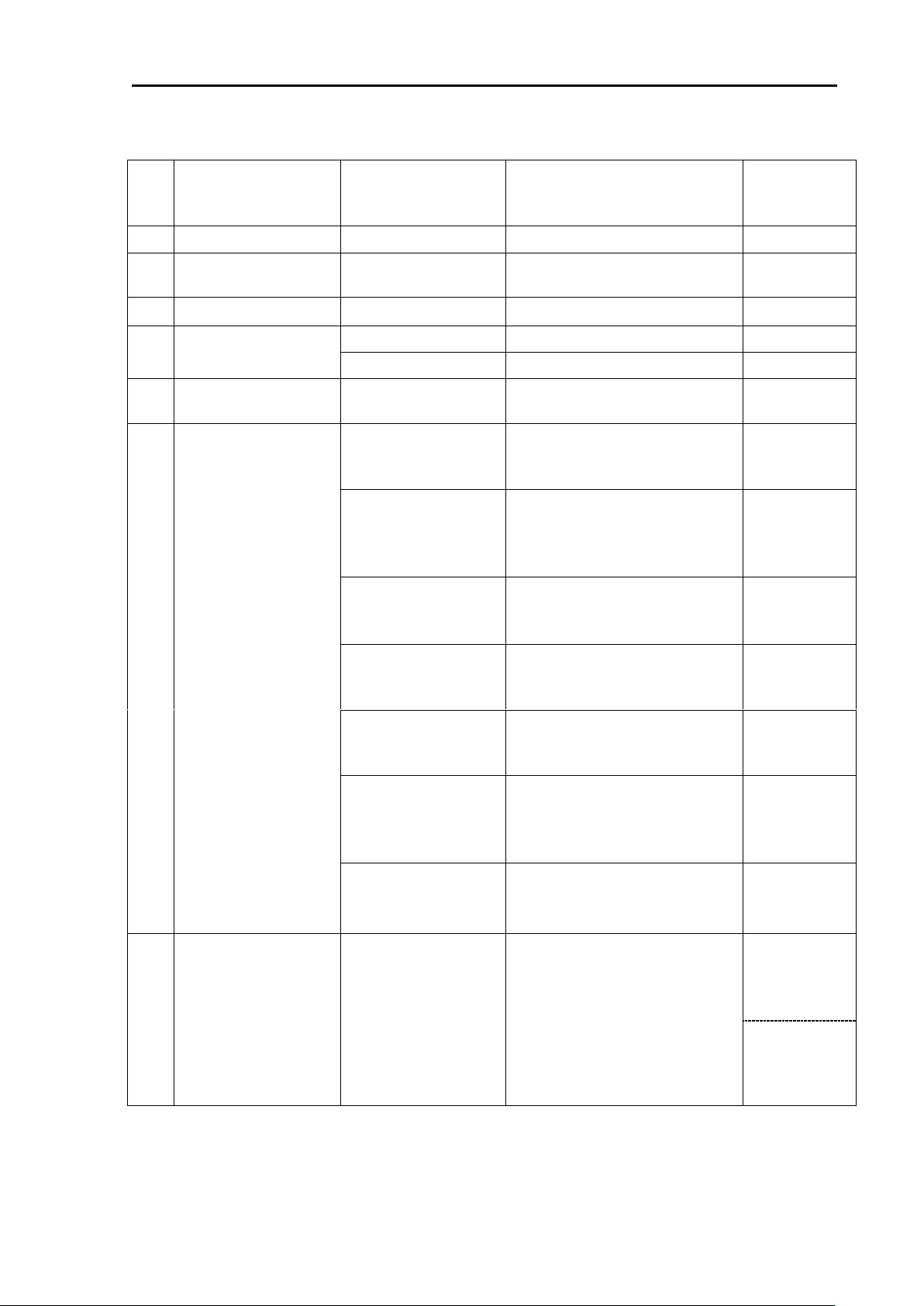
No.
Name
Specification
Comment
Weight
/Dimension
/Quantity
1
Gyro converter
S2N, U/N 9028C
qwerty-electronic
2
Log pulse NMEA
converter
L1N, U/N 9181A
qwerty-electronic
200pulse/NM only
3
Gyro / Log interface
ADPC-101
1.5 kg
4
Rectifier unit
PS-010
5A fuse attached
3.5 kg
VL-PSG001
For RW701B-09
5
AC power cable
VV-2D8-3M
Without connectors on the both
sides
3 m
6
Connecting cable
CW-373-*
*: 5M, 10M or 30M
With 6-pin water resistant
connectors at both ends (cable
for data)
5 m, 10 m
or 30 m
CW-374-5M
With a 6-pin connector (1006
series) and a 6-pin water
resistant connector (cable for
data)
5 m
CW-376-5M
With a 6-pin water resistant
connector and one end plain
(cable for data)
5 m
CW-387-5M
With a 8-pin water resistant
connector and one end plain
(cable for AIS)
5 m
CW-561- *
*: 10M or 30M
With 12-pin water resistant
connectors at both ends (cable
for remote display)
10 m or 30 m
CW-576-0.5M
With a 10-pin water resistant
connector and D-Sub connector
(analog RGB) + Alarm out
0.5 m
CW-401- *
*: 5M or 10M
Operation unit cable
5 m or 10 m
7 Antenna-Scanner unit
and Processor unit
connecting cable
CW-845-*
*: 20M, 30M, 40M,
50M, 65M, 100M
With connectors on the both
sides
(For MDC-5006/5012/5025)
20m, 30m,
40m, 50m,
65m or 100m
242J159098*-**M
**: 20M, 30M, **M
(100m max)
With connectors on the both
sides
(For MDC-5004)
20m, 30m,
**m (100m
MAX)
2.4 Option list
0092653004-00 2-3
Page 18
Chapter 2 System configurations MDC-5000 Series
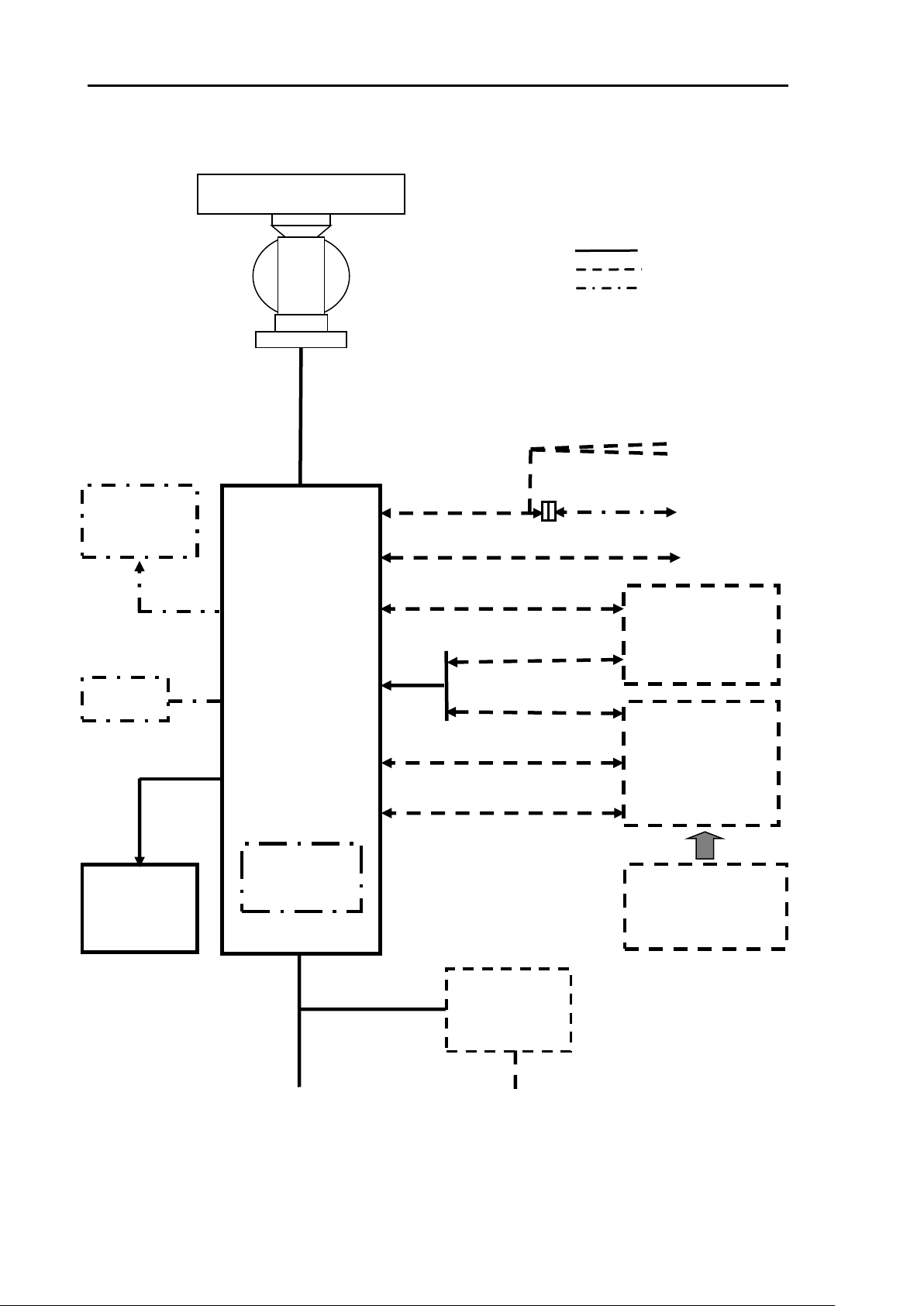
Processor unit
MRM-110
Connecting cable
CW-845-15M (Standard)
CW-845-20M/30M40M//50M/65M/100M
242J159098-15M (Standard)
242J159098-20M/30M
Scanner unit
RB806 (4kW)
RB807 (6kW)
RB808 (12kW)
RB809 (25kW)
Power cable
CW-259-2M
Rectifier
PS-010
or
VL-PSG001
Onboard DC power supply
21.6 to 41.6VDC
Onboard AC power supply
100/115VAC
200/230VAC
AC power cable
VV-2D8-3M
Alarm out
Operation unit
MRO-110
NMEA signal I/O
NMEA0183
IEC61162-1
IEC61162-2
AIS
CW-376-5M
CW-373/374/376-5M
CW-387-5M
CW-576-0.5M
Slave Monitor or
Processor
MRD-108+MRO-108
MRD-109+MRO-108
MRD-111
MRM-110+MRO-110
CW-373-5M/10M/30M
CW-561-10M/30M
J1 (10P)
J2 (8P)
J8 (12P)
VDR or
External monitor
J3 (6P)
J5 (6P)
Antenna
RW701A-03
RW701A-04
RW701A-06
RW701B-09
Standard
Option
Owner supplied
J7
POWER
J9
C-MAP
SD CARD
USB Mouse/
Trackball.
USB
XGA Display
(Analog RGB)
Display
Navigation devices
(GPS / GPS compass)
Gyro Interface
Log Intergace
Gyro/Log interface
J6 (6P)
CW-373/374/376-5M
Monitor cable
2.5 MDC-5004/5006/5012/5025 series system configuration
2-4 0092653004-00
Page 19

MDC-5000 Series Chapter 3 Installation method
Unit: mm (inch)
Chapter 3 Installation method
3.1 How to install the Antenna Scanner unit
External view and dimensions
RB806
RB807
0092653004-00 3-1
Page 20

Chapter 3 installation method MDC-5000 Series
Unit: mm (inch)
RB808
RB809
3-2 0092653004-00
Page 21
MDC-5000 Series Chapter 3 Installation method
Unit: mm (inch)
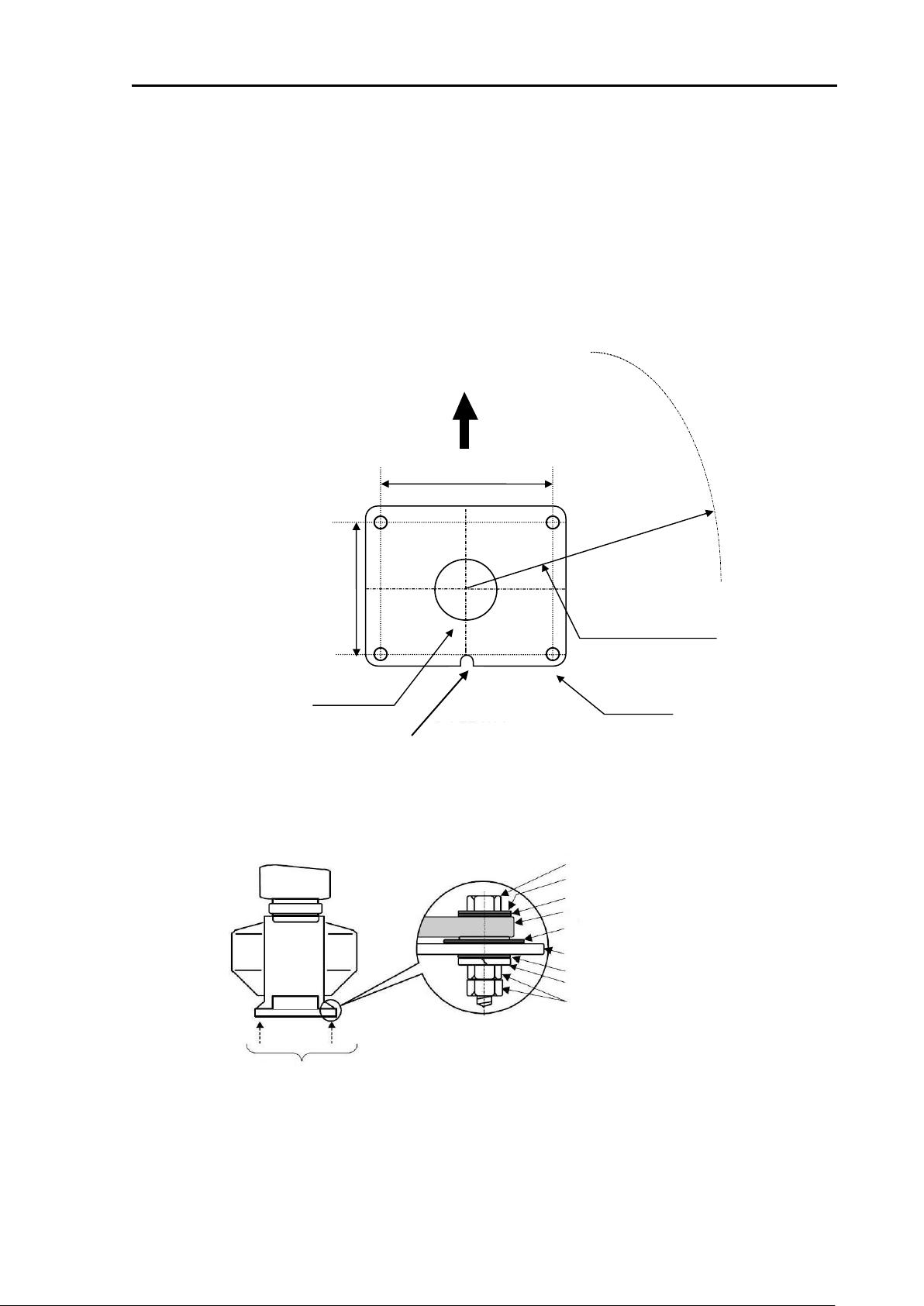
100 φ
RA774UA
Figure 3.1 Plain view of mounting hole
199
(7.83)
185
(7.28)
(0.55)
(3.97)
Notch of Scanner
Heading
Antenna rotating radius
R600 (3 ft Antenna unit)
R700 (4 ft Antenna unit)
R1000 (6 ft Antenna unit)
R1400 (9 ft Antenna unit)
14φx 4
Cable opening
Figure 3.2 Assembly of Scanner unit base
Mounted with four bolts
M12 Double nut
Spring washer
Washer
M12 bolt
Platform
Scanner unit base
Washer
Anti-electro corrosive washer
Anti-electro corrosive washer
3.1.1 Installation of the Antenna Scanner unit
The Antenna Scanner unit is equipped to orient the notch of the attachment to stern as shown in Figure
3.1. Installation in this way eases maintenance work. Also refer to the consideration on equipment
shown in 1.4.1.
(1) Four mounting holes 14 mm in diameter are located on the mounting platform with reference to
Figure 3.1.
(2) The Antenna Scanner unit is secured with four 12 mm stainless steel bolts contained in installation
material.
0092653004-00 3-3
Page 22
Chapter 3 installation method MDC-5000 Series
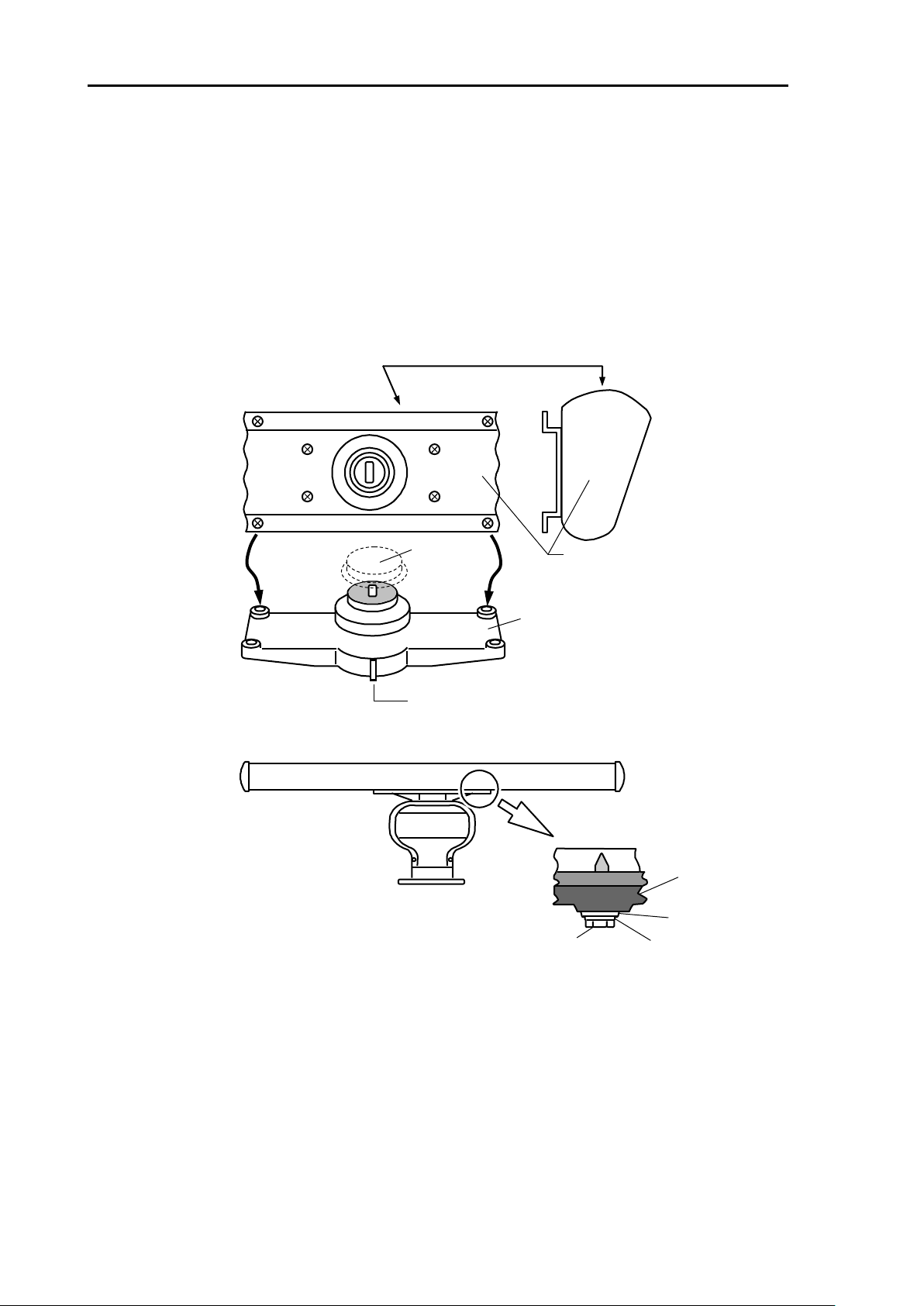
Antenna radiation side (KODEN –mark side)
Antenna
Rotating base
Remove
Protective cap
Projection mark
Figure 3.3 Antenna assembly to the rotating shaft
Rotating base
Flat washer
Spring washer
Installation bolt
3.1.2 Mounting the Antenna
(1) Remove the protective cap on top of the Scanner unit rotational shaft.
(2) Remove four bolts tentatively fixed to the base of the antenna and install the Scanner unit to the
rotating base. Align the direction of antenna radiation side (KODEN –mark side) with the projection
mark on the rotating base.
(3) Fix the aerial with four bolts removed in step 2.
3-4 0092653004-00
Page 23
MDC-5000 Series Chapter 3 Installation method
4kW (RB806)
cable clamp
X12
X11
X1
X2
Fixing bolt
TR unit
Magnetron lead wire
cable clamp
X1
X2
X11
X12
magnetron
Cut portion of Scanner unit base
Fixing bolt
Shield braid terminal
Cable holder plate
Scanner unit
Antenna cable
Put the shield braid
under the cable holder plate
as short as possible.
7-pins connector
Shield braid
9-pins connector
Remove the heat contraction tube
Rubber packing
Cable inlet hole
Make the height less than 5mm
TR unit
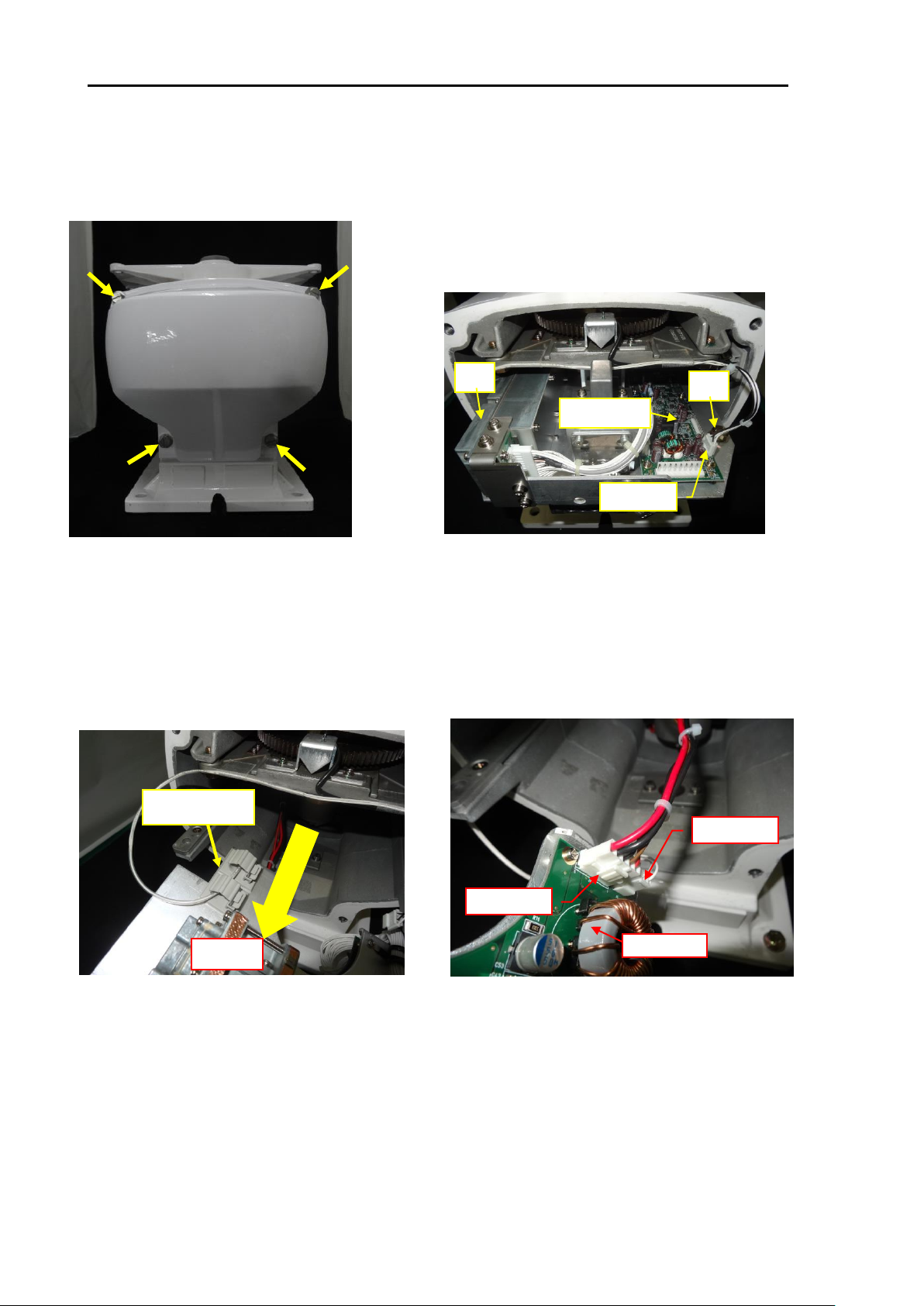
3.1.3 Installation of the connecting cable 242J159098x-xxM
3.1.3.1 Scanner unit 4kW (RB806)
(1) Please make sure power supply of the Scanner unit is OFF.
(2) Disassemble the front cover of the Scanner unit from the rear cover by loosening fixing bolts.
(3) Remove the TR unit by disconnecting the connector X1 and X2 after loosening fixing bolts of
the TR unit. Please make sure magnetron does NOT touch metals.
(4) Remove the cable holder plate and the rubber packing by loosening bolts at the bottom of
the Scanner unit box.
(5) Antenna cable shall be taken into the Scanner unit box through the cable inlet hole.
(6) Antenna cable shall be fixed as described in the illustration below, using the cable holder plate
and the rubber packing removed in 4. Shield braid terminal shall be fixed under the cable holder
plate together with lug terminal, after removing the edge portion of heat contraction tube of the
antenna cable.
(7) Mount the TR unit after connecting the X1 and X2 connectors (removed in 3) by fixing bolts.
(8) 7 pin connector shall be connected to X11 of the TR unit, 9 pin connector to X12.
(9) Antenna cable shall be clamped onto the TR unit. Please make sure the antenna cable does
NOT touch magnetron lead wires.
(10) The front and rear covers of the Scanner unit shall be fixed by fixing bolts.
0092653004-00 3-5
Page 24
Chapter 3 installation method MDC-5000 Series
3) Pull out the TR unit, remove the
cable clamp.
TR unit
4) Disconnect connector P2 from J2 and
P2 from J5.
P2 <- J2
PCB: E71-110X
P2 <- J5
2) Disconnect connectors P3 from J3
[E61-120X].
Remove the two fixing bolts.
(Tool: Wrench 13mm)
PCB: E61-120X
P3 <- J3
Bolt
Bolt
1) Remove back cover by loosening four fixing
bolts.
(Tool: Wrench 13mm)
Cable clamp
3.1.4 Installation of the connecting cable CW-845-xxM
3.1.4.1 Scanner unit 6kW (RB807)
Make sure the radar system is turned off.
3-6 0092653004-00
Page 25
MDC-5000 Series Chapter 3 Installation method
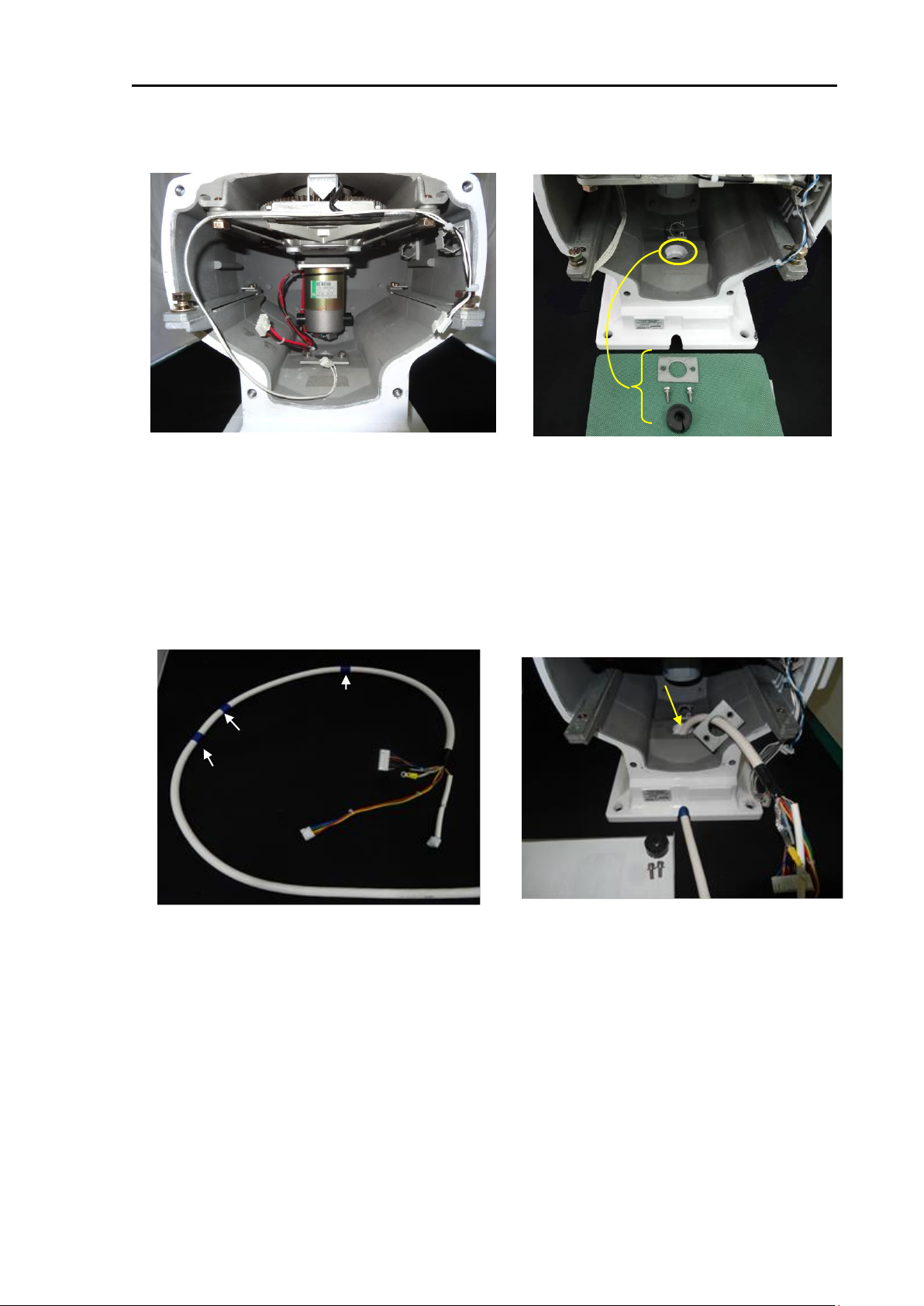
5) This picture is the view of scanner unit housing.
(a) Cable holder plate
(b) Cable clamp-b
(c) Cable clamp-c
(a)
(b)
(c)
7) The connecting cable CW-845-xxM
Blue tapes are wound as a mark on the cable.
Blue tape mark-b
Blue tape mark-a
Blue tape mark-c
Connecting cable
Cable inlet hole
8) Pull in the connecting cable into the
scanner unit through the cable inlet hole
Guide the cable to the cable holding
plate.
6) Remove two fixing bolts.
(Tool: Wrench 8mm)
Remove the cable holding plate and
rubber packing.
Cable holding plate
Fixing bolt (8mm)
Rubber packing
0092653004-00 3-7
Page 26

Chapter 3 installation method MDC-5000 Series
9) Attach rubber packing to the blue tape
mark-a.
Rubber packing
Blue tape mark-a
10) Attach cable holding plate and fix it with
two bolts.
(Tool: Wrench 8mm)
Cable holding plate
12) Secure the ferrite core in place by using
provided bands.
Note: The ferrite core and the bands are included
with the installation material.
Ferrite core
Band
Band
11) Attach the ferrite core from blue tape-b
to 10cm end.
Blue tape mark-b
3-8 0092653004-00
Page 27
MDC-5000 Series Chapter 3 Installation method
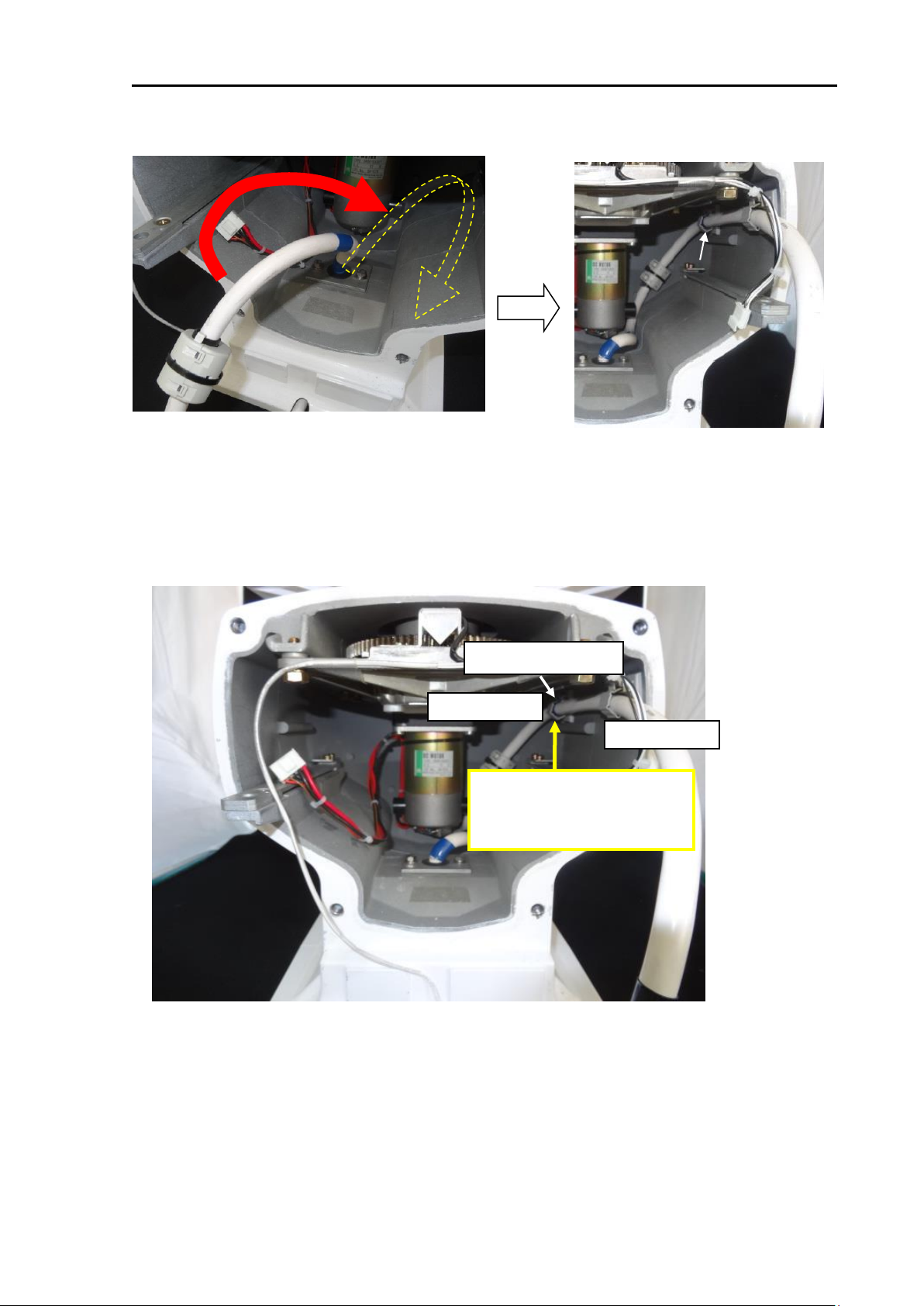
13) The cable placed in the far right under
the motor.
Cable clamp-b
Clamp the blue tape mark by
the cable clamp-c.
Blue tape mark-c
Cable clamp-c
15) This picture is the view of the cable layout.
Clamp the blue tape mark-c by the cable clamp-c.
14) Clamp the cable by the cable
clamp-b.
Cable clamp-b
0092653004-00 3-9
Page 28

Chapter 3 installation method MDC-5000 Series
18) Insert TR unit in the scanner unit
housing.
TR unit
16) Connect connector P2 to J2 and P4 to J5.
[PCB E71-110X].
P2 -> J2
PCB: E71-110X
P4 -> J5
17) Through the P4 to J5 to clamp A and B.
P4 -> J5
Clamp A
Clamp B
19) Connect connectors P3 to J3 [PCB E61-120X]
Fix the two fixing bolts.
(Tool: Wrench 13mm)
PCB: E61-120X
P3-> J3
Bolt
Bolt
3-10 0092653004-00
Page 29
MDC-5000 Series Chapter 3 Installation method
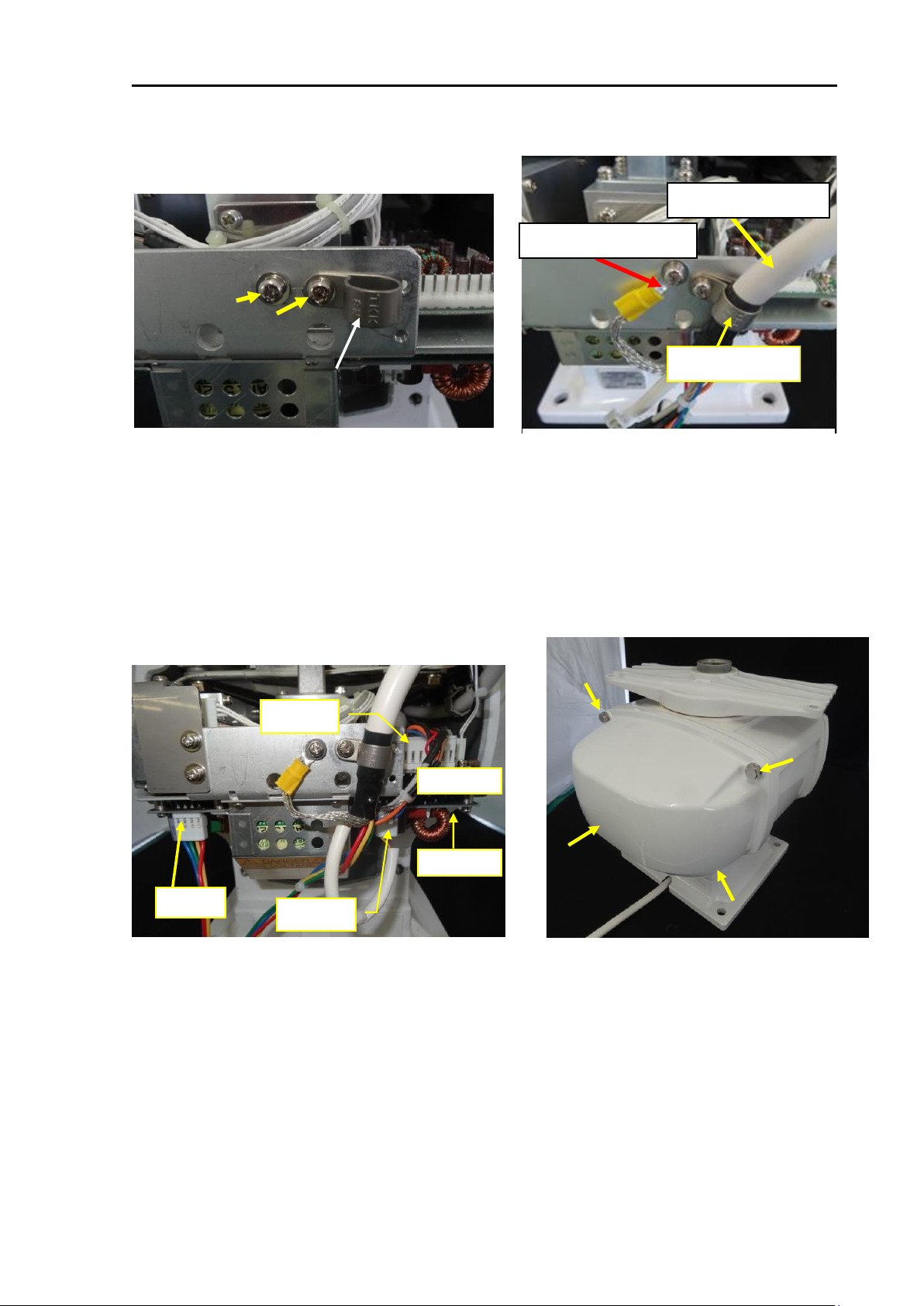
23) Attach the back cover by tightening four fixing
bolts.
(Tool: Wrench 13mm)
Connecting cable
Shield braid terminal
Clamping band
21) Clamp the connecting cable by the
clamping band and fix with screw-A.
Fix the shield braid terminal with screw-B.
22) Connect connector P2 to J2 [PCB E61-120x].
Connect the connectors P1 and P3 to J1 and J3
[PCB E71-110X].
P3 -> J3
P2 -> J2
PCB: E61-120X
PCB: E71-110X
P1 -> J1
20) Remove the screw-A and the screw-B.
B
Clamping band
A
0092653004-00 3-11
Page 30

Chapter 3 installation method MDC-5000 Series
4) Disconnect connector P2 from J2
[E61-110X].
1) Remove back cover by loosening four fixing
bolts.
(Tool: Wrench 13mm)
2) Disconnect connectors P3 from J3
[E61-120X].
Remove the two fixing bolts.
(Tool: Wrench 13mm)
PCB: E61-120X
P3 <- J3
Bolt
Bolt
3) Pull out the TR unit.
TR unit
P2 <- J2
PCB: E61-110X
3.1.4.2 Scanner unit 12kW (RB808)
Make sure the radar system is turned off.
3-12 0092653004-00
Page 31

MDC-5000 Series Chapter 3 Installation method
6) Remove two fixing bolts.
(Tool: Wrench 8mm)
Remove the cable holding plate and
rubber packing.
8) Pull in the connecting cable into the
scanner unit through the cable inlet hole.
Guide the cable to the cable holding plate.
Cable holding plate
Fixing bolt (8mm)
Rubber packing
7) The connecting cable CW-845-xxM
Blue tapes are wound as a mark on the cable.
Blue tape mark-b
Blue tape mark-a
Blue tape mark-c
Connecting cable
Cable inlet hole
5) This picture is the view of the inside of the
scanner unit housing.
(a) Cable holding plate
(b) Cable clamp-b
(c) Cable clamp-c
(d) Cable clamp-d
(a)
(b)
(c)
(d)
0092653004-00 3-13
Page 32

Chapter 3 installation method MDC-5000 Series
9) Attach rubber packing to the blue tape
Mark-a.
Rubber packing
Blue tape mark-a
10) Attach cable holding plate and fix it
with two bolts.
(Tool: Wrench 8mm)
Cable holding plate
12) Secure the ferrite core in place by using
provided bands.
Note: The ferrite core and the bands are included
with the installation material.
Band
Band
Ferrite core
11) Attach the ferrite core to side of the
blue tape mark-b.
Blue tape mark-b
Ferrite core
3-14 0092653004-00
Page 33

MDC-5000 Series Chapter 3 Installation method
14) Clamp the cable by the cable
clamp-b.
Cable clamp-b
Ferrite core
15) This picture is the view of the cable layout.
Clamp the blue tape mark-c by the cable clamp-c.
Cable clamp-d
Cable clamp-b
Blue tape mark-c
Cable clamp-c
Clamp the blue tape mark by the
cable clamp-c.
13) Tilt the cable with the ferrite core
toward the cable clamp-b.
Cable clamp-b
Ferrite core
0092653004-00 3-15
Page 34

Chapter 3 installation method MDC-5000 Series
19) Connect connectors P3 to J3 [PCB E61-120X]
Fix the two fixing bolts.
(Tool: Wrench 13mm)
16) Connect connector P2 to J2
[PCB E61-110X].
P2 -> J2
PCB: E61-110X
17) Hook the P2 to J2 to the clamp.
P2 -> J2
Clamp
18) Insert TR unit in the scanner unit
housing.
TR unit
PCB: E61-120X
P3-> J3
Bolt
Bolt
3-16 0092653004-00
Page 35

MDC-5000 Series Chapter 3 Installation method
21) Clamp the connecting cable by the
clamping band and fix with screw-A.
Fix the shield braid terminal with screw-B.
Connecting cable
Shield braid terminal
Clamping band
20) Remove the screw-A and the screw-B.
B
Clamping band
A
22) Connect connector P2 to J2 [PCB E61-120x].
Connect the connectors P1 and P3 to J1 and J3
[PCB E61-110X].
P3 -> J3
P2 -> J2
PCB: E61-120X
PCB: E61-110X
P1 -> J1
23) Attach the back cover by tightening four
fixing bolts.
(Tool: Wrench 13mm)
0092653004-00 3-17
Page 36

Chapter 3 installation method MDC-5000 Series
4) Disconnect connector P2 from J2
[E62-110X].
3) Pull out the TR unit.
TR unit
2) Disconnect connectors P3 and P4 from J3
and J4 [E61-120X].
Remove the two fixing bolts.
(Tool: Wrench 13mm)
P3 <- J3
PCB: E61-120X
Bolt
Bolt
1) Remove the back cover by loosening four fixing
bolts.
(Tool: Wrench 13mm)
P2 <- J2
PCB: E62-110X
3.1.4.3 Scanner unit 25kW (RB809)
Make sure the radar system is turned off.
3-18 0092653004-00
Page 37

MDC-5000 Series Chapter 3 Installation method
6) Remove the fixing two bolts.
(Tool: Wrench 8mm)
Remove cable holding plate and
rubber packing.
5) This picture is the view of the inside of the
scanner unit housing.
(a) Cable holding plate
(b) Cable clamp-b
(c) Cable clamp-c
(d) Cable clamp-d
(a)
(b)
(c)
(d)
Cable holding plate
Fixing bolt (8mm)
Rubber packing
8) Pull into the inside of the scanner unit housing
through the cable inlet hole.
Guide the cable to the cable holding plate.
Cable inlet hole
7) The connecting cable CW-845-xxM
Blue tapes are wound as a mark on the cable.
Blue tape mark-b
Blue tape mark-a
Blue tape mark-c
Connecting cable
0092653004-00 3-19
Page 38

Chapter 3 installation method MDC-5000 Series
9) Attach rubber packing to the blue tape
Mark-a.
Rubber packing
Blue tape mark-a
10) Attach cable holding plate and fix it
with two bolts.
(Tool: Wrench 8mm)
Cable holding plate
12) Secure the ferrite core in place by using
provided bands.
Note: The ferrite core and the bands are included
with the installation material.
Band
Band
Ferrite core
11) Attach the ferrite core to side of the
blue tape mark-b.
Blue tape mark-b
Ferrite core
3-20 0092653004-00
Page 39

MDC-5000 Series Chapter 3 Installation method
14) Clamp the cable by the cable
clamp-b.
Cable clamp-b
Ferrite core
15) This picture is the view of the cable layout.
Clamp the blue tape mark-c by the cable clamp-c.
Cable clamp-d
Cable clamp-b
Blue tape mark-c
Cable clamp-c
Clamp the blue tape mark by the
cable clamp-c.
13) Tilt the cable with the ferrite core
toward the cable clamp-b.
Cable clamp-b
Ferrite core
0092653004-00 3-21
Page 40

Chapter 3 installation method MDC-5000 Series
16) Connect connector P2 to J2
[PCB 62-110X].
P2 -> J2
PCB: E62-110X
17) Hook the P2 to J2 to the clamp.
P2 -> J2
Clamp
19) Connect connectors P3 and P4 to J3 and J4 [PCB
E61-120X]
Fix the two fixing bolts.
(Tool: Wrench 13mm)
P3 -> J3
PCB: E61-120X
Bolt
Bolt
18) Insert the TR unit in the scanner unit
housing.
TR unit
3-22 0092653004-00
Page 41

MDC-5000 Series Chapter 3 Installation method
23) Attach the back cover by tightening four
fixing bolts.
(Tool: Wrench 13mm)
20) Remove screw-A and screw-B.
A
B
Clamping band
21) Clamp the connecting cable by the
clamping band and fix with screw-A.
Fix the shield braid terminal with screw-B.
Clamping band
Connecting cable
Shield braid terminal
22) Connect connector P2 to J2 [PCB
E61-120x].
Connect connectors P1 and P3 to J1 and J3
[PCB E62-110X].
P2 -> J2
P1 -> J1
P3 -> J3
PCB: E61-120X
PCB: E62-110X
0092653004-00 3-23
Page 42

Chapter 3 installation method MDC-5000 Series
Antenna-Scanner unit Processor unit
P2 PX
Description Cable color No. No. Cable color Description
Ground
--22Blue
+24V
+250V
Purple11
Purple
+250V
+53V
Red (thick)
44Yellow
GND
GND
Yellow33
Orange (thick)
+12V
+53V-RTN
Green (thick)
66Red
DATA
+53V
Yellow (thick)
55Shield
DATA-RTN
8
Brown
BP/SHF
+53V-RTN
Blue (thick)
77-
-
P1
10
Grey (coax)
V/TRG
9
Shield
BP/SHF-RTN
+24V
Blue112
Red (thick)
+53V
Description
Cable color
No.11-
-
+12V
Orange (thick)
314Shied
V/TRG-RTN
--213Yellow (thick)
+53V
DATA
Red516
Blue (thick)
+53V-RTN
DATA-RTN
Shield
415Green (thick)
+53V-RTN
V/TRG-RTN
Shield
8
V/TRG
Grey (coax)
9
BP/SHF-RTN
Shield
6
BP/SHF
Brown
7
GND
Shield
3.2 Interconnection diagram of cable
3.2.1 242J159098 (MDC-5004)
Figure 3.4 Interconnection of cable between Antenna-Scanner unit and Processor unit
3-24 0092653004-00
Page 43

MDC-5000 Series Chapter 3 Installation method
Antenna-Scanner unit Processor unit
P1 PX
Description Cable color No. No. Cable color Description
Ground
+24V
Blue11
Purple
+250V
+12V
Orange (thick)
33Orange (thick)
+12V
--22Blue
+24V
DATA
Red55
Shield
DATA-RTN
DATA-RTN
Shield44
Yellow
GND
BP/SHF
Brown77--
BP/SHF-RTN
Shield66
Red
DATA
V/TRG
Grey (coax)
99Shield
BP/SHF-RTN
V/TRG-RTN
Shied88
Brown
BP/SHF
Description
Cable color
No.12Red (thick)
+53V
10
Grey (coax)
V/TRG
P2
11--
--214Shied
V/TRG-RTN
+250V
Purple
113Yellow (thick)
+53V
16
Blue (thick)
+53V-RTN
GND
Yellow
315Green (thick)
+53V-RTN
+53V
Red (thick)
1
+53V
Yellow (thick)
2P3Description
Cable color
No.
GND
Shield
+53V-RTN
Green (thick)
3
+53V-RTN
Blue (thick)
4
3.2.2 CW-845 (MDC-5006/5012/5025)
Figure 3.5 Interconnection of cable (CW-845) between Antenna-Scanner unit and Processor unit
0092653004-00 3-25
Page 44

Chapter 3 installation method MDC-5000 Series
Unit: mm (inch)
MRO-110
MRM-110
3.3 Installation of the Processor unit and Operation unit
External view and dimensions
3-26 0092653004-00
Page 45

MDC-5000 Series Chapter 3 Installation method
4mm screw for 4holes
308 mm
12 1/8 inch
308 mm
12 1/8 inch
308 mm
12 1/8 inch
308 mm
12 1/8 inch
3.3.1 Installation of Processor unit
The Processor unit MRM-110 can be mounted on a table or a panel. The procedure is as follows.
(1) Drill four nut-holes with the size shown in Figure 3.6.
(2) Fit the Processor unit.
Figure 3.6 Holes for mounting a Processor unit
0092653004-00 3-27
Page 46

Chapter 3 installation method MDC-5000 Series
Clamp (left)
Clamp (right)
M5 screw
(four places)
Operating unit
M4M4 screw
(four places)
Corner guard cap
(four places)
(3 45/64)
94
(14 39/64)
371
Unit : mm(inch)
Figure 3.7 Installation of Operation unit
3.3.2 Installation of Operation unit
(1) Remove the four corner guard caps of Operation unit. Insert the tip of a small flat-blade screwdriver
carefully between a corner guard cap and the front bezel of Operation unit to make a gap, and then
pinch and pull up the corner guard cap with fingers. Take care not to damage the bezel of
Operation unit by the tip of flat-blade screwdriver.
(2) Remove M4 (4 mm) screws and remove the Operation unit from the mounting bracket.
(3) Mark the place as shown in the following figure, and then secure the mounting bracket with 5M (5
mm) tapping screws at four places.
(4) Secure the Operation unit to clamps with M4 (4 mm) screws that were removed in step (2) and
reinstall the corner caps.
3-28 0092653004-00
Page 47

MDC-5000 Series Chapter 3 Installation method
(3 15/16)
100
(5 37/64)
141.5
(1 37/64)
40
(15 5/32)
385
(1 37/64)
40
Unit : mm(inch)
Figure 3.8 Maintenance space necessary for Operation unit
Maintenance space
142
Mounting dimensions
0092653004-00 3-29
Page 48

Chapter 3 installation method MDC-5000 Series
Operating unit
M4 screw
(four places)
Corner guard cap
(four places)
Note) Panel thickness: 10 mm (max)
(4mm screw for 4holes)
(15/32)
12
(5 3/64)
128
(4 5/64)
122
(15/32)
12
(12 33/64)
318
(15/32)
12
(13 15/32)
342
(3 55/64)
98
(13 45/64)
348
Unit : mm(inch)
Figure 3.9 Cutout Diagram for Operation unit
(4 51/64)
Figure 3.10 Flush mounting the Operation unit
Operation unit
3.3.2.1 Flush mounting for Operation unit
Preparation:
(1) Cut an opening as shown in Figure 3.9 in desired location on a panel.
(2) Mark position of mounting holes.
Installation:
(1) Remove corner guard caps of Operation unit.
(2) Insert the Operation unit and its connecting cable into the opening and adjust the Operation
(3) Secure the Operation unit to the panel with 4 mm tapping screw (4 places).
(4) Reinstall corner guard caps removed in (1) to the original places.
unit parallel to the mounting face (Figure 3.10).
3-30 0092653004-00
Page 49

MDC-5000 Series Chapter 3 Installation method
Operation unit
MRO-110
Power cable
CW-259-2M
Standard length: 2 m
AC Power cable,
(Ordered goods)
View of CW-259 connector
Power cable pin assignment
No.
Wire color
Signal name
1
Black
DC Main power (-)
2
White
DC Main power (+)
3
Grey
Ground
1
2
3
Connecting cable
CW-845
or
242J159098
Standard length: 15 m
AC/DC Rectifier
PS-010
or
VL-PSG001
Figure 3.11 Cable connections for standard configuration of MRM-110 Processor unit
Processor unit
MRM-110
Antenna-Scanner unit
DC Power supply
21.6 to 41.6 VDC
3.4 Cable connection to a Processor unit
3.4.1 Cable connection for MRM-110
Attach cables from an Antenna-Scanner unit, power source and Operation unit, to corresponding
receptacles as shown in Figure 3.11.
0092653004-00 3-31
Page 50

Chapter 3 installation method MDC-5000 Series
VDR
or
External monitor
CW-576-0.5M
Failure alarm contact
output from the radar.
Contact will close in case
of failure.
Switching voltage: 30V
Max current capacity: 1A
White
Black
Monitor cable
J1
Figure 3.13 Cable connection of Processor unit to VDR and Alarm output
XGA Monitor
Analog RGB input
Display cable*
Analog RGB cable
Figure 3.12 Cable connection of Processor unit to ext. monitor
Processor unit
MRM-110
*Owner supplied
3.4.2 Connecting an External monitor
3.4.3 Connecting a VDR or External monitor & Failure alarm output
3-32 0092653004-00
Page 51

MDC-5000 Series Chapter 3 Installation method
Figure 3.14 Cable connection for NMEA input/output signals
J3
Navigation devices
THD
GPS Compass
Gyro converter
Log converter
Others
CW-373/374/376
Pin
No.
CW-376
Wire color
Signal
name
1
Blue+shirld
GND
2
White
OUT-A
3
Red
OUT-B
4
Orange
IN-A
5
Black
IN-B
6
Green
J3: +12V
J5: +12V
J6: NC
Wiring of J3, J5, J6 port
THD:
Transmitting
Heading
Device
An initial value of the Baud rate of the port is as follows.
J3: 38400bps The Baud rate can switch 4800bps or 38400bps in the radar menu.
J5: 4800 bps [MAINTENANCE] => [I/O] => [BAUDRATE]
J6: 4800 bps
The sentence input to these ports is shown below.
Position information: GLL, GGA, GNS, RMC, RMA
Heading information: THS, HDT, HDG, HDM, VTG, RMC, RMA
Speed information: VBW, VTG, VHW
Set and drift: VDR
Waypoint information: RMB, BWC, RTE, WPL
Routes: RTE, WPL
Cross-track: RMB, XTE
Datum: DTM
Depth: DBT, DPT
Temperature: MTW
Date: ZDA, RMC, GGA
LOP: GLC
Wind: MWD
ROT: ROT
These sentences can select the port of each sentence input in the radar menu.
As for the J6 port, the transmission cycle is set at 0 seconds and not output by default.
The J5 port is output TTM sentence in a cycle for 1 second by default.
The J3 port is output at the following cycles by default.
EVE=1.0s, HBT=5.0s, OSD=1.0s, RSD=1.0s, TLB=5.0s
J5
J6
1
2
3
4 5 6
Cable connector pin assignment
3.4.4 Cable connection for NMEA input/output signals
0092653004-00 3-33
Page 52

Chapter 3 installation method MDC-5000 Series
Note 1
Please set the output of the heading signal (Gyro converter and THD (gyro serial
output)) as follows.
Baud rate=38400bps
TX cycle=25ms-50ms,
Sentence=THS or HDT,
Figure 3.15 Cable connections for AIS
*Green/Black twisted cable (Black is not used.)
1 7 2
3 4 8 6 5
Pin
No.
CW-387 Wire color
Signal name
1
Shield
Frame ground
2
Blue
Twist
cable
IN-A
3
White
IN-B
4
Yellow
Twist
cable
OUT-B
5
Brown
OUT-A
6
Green*
GND
7
Red
Twist
cable
NC
8
Grey
NC
Pin 1 Indicated
AIS Cable connector pin assignment
Serial signal
IEC 61162-2
CW-387-5M
J2
Note 2
When using inter-switch connection, J3 port is used for a data connection with Master
or Slave display.
Refer to “3.4.6 Cable connection for inter-switch”
Note 3
When connect the GPS Compass made by KODEN, please use J6 port.
After installation, initialize GPS compass from radar menu to set the baud rate and
output sentences by J6.
Refer to “4.2.3.1 Connection of KODEN GPS compass”.
3.4.5 AIS cable connection
3-34 0092653004-00
Page 53

MDC-5000 Series Chapter 3 Installation method
Figure 3.16 Connecting a slave Processor unit on
Crossover, dual and independent connection
Master Processor unit
(MRM-110)
J7
Slave Processor unit (MRM-110)
Connect slave antenna
unit to slave Processor unit
in the case of crossover
connection.
Remote cable
CW-561-10M or 30M
(10m or 30m)
J8
J8
J3
J3
Data cable
CW-373
3.4.6 Cable connection for inter-switch
3.4.6.1 Cable connection instructions for cross-over, dual and independent
connection
In case of a dual, cross-over, or master/slave connection using two sets of radar system or
Processor unit, the remote cable and data cable are connected as shown in the figure 3.16.
(1) The heading, speed and latitude/longitude signals input to the data connector of master
Processor unit and are supplied to the slave Processor unit via data cable. The slave Processor
unit can also use TT (ATA) and chart option functions in the same way as the master one.
(2) Connect the slave Scanner unit to the slave Processor unit in a crossover connection.
(3) Operation unit (MRO-110) is required for MRM-110.
0092653004-00 3-35
Page 54

Chapter 3 installation method MDC-5000 Series
Master Processor unit
(MRM-110)
Slave Processor unit
(MRM-110)
Remote cable
CW-561
Figure 3.17 Connecting a slave Processor unit as a monitor
J8
J8
3.4.6.2 Cable connection for slave display used as a monitor
When the slave Processor unit for radar is used as monitor, the remote cable is connected as
follows.
(1) When used as a monitor, the slave Processor unit cannot control the Scanner unit. The monitor
(slave Processor unit) will display its range in accordance with the master one.
(2) Operation unit (MRO-110) is required for MRM-110.
3-36 0092653004-00
Page 55

MDC-5000 Series Chapter 4 Setup after installation
Chapter 4 Setup after installation
Some setup procedures are required after system installation. Before performing the setup procedures,
please check the following items for normal operation:
(1) The onboard power supply powering the radar system has the specified voltage.
(2) No one is in the area around the Antenna unit on the mast. The indication “Under the radar
coordination, do not touch the Operation unit.” is marked on the Processor unit.
Note: Press MENU key to display “Menu” before the menu operation.
Please execute the items in the [MAINTENANCE] menu to the equipment adjustment in the following
order.
STARTUP TUNE, HL OFFSET, TX DELAY, ANT HEIGHT, ANT CABLE, MBS,
SEA CURVE, FUNCTION KEY, RANGE ENABLE, MOTOR HIGH SPEED,
MOUSE SPEED, TX HOUR DISP
I/O Serial interface setting with other equipments.
SECTOR MUTE Setup sector mute mode ON or OFF, START and END position.
PRESET Setup RAIN min and max, SEA min and max, GAIN min and max, GAIN offset,
and SEA offset.
BACKUP How to save and load BACKUP data.
BITE System hardware check.
TOTAL HOUR Confirmation of the power on time of this system and, reset the time.
TX HOUR Confirmation of the transmission time, and reset the time.
MENU SETUP Setup menu item display on or off.
VERSION Confirmation of installed software version.
0092653004-00 4-1
Page 56

Chapter 4 Setup after installation MDC-5000 Series
AUTO ADJ
MAN ADJ
4.1 STARTUP menu
4.1.1 Tune adjustment (TUNE)
In order to achieve best performance, adjustment of the automatic tune is required at the time of a new
installation or a magnetron exchange.
It may be impossible to obtain optimum sensitivity without adjusting the automatic tune.
Caution: With starting of the tune adjustment, GAIN mode is set at MAN, SEA mode is set at
MAN 0, RAIN mode is set at MAN 0, PROCESS is set at OFF and the range scale is set at 24NM.
After setting of the tune adjustment, GAIN mode/SEA mode/RAIN mode/PROCESS/range scale
will return to previous setting.
(1) Find stable object such as the mountain or island as far as possible. Adjust GAIN knob to
decrease the gain to a level where the chosen target is barely visible.
(2) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [TUNE] and set it to [AUTO ADJ] by moving the
joystick, and then press ENT key.
(3) Select [MAINTENANCE] => [STARTUP] => [TUNE] => [AUTO ADJ] => [VALUE] will show the
current setting of the input value by highlighting the last digit value by the joystick.
(4) Move the joystick up or down to change the value, and obtain the maximum magnitude of the
target on the display. When a target becomes too strong to find the peak, lower gain with GAIN
knob once again and adjust the tune to obtain the maximum magnitude of target.
(5) Press ENT key to save the result of the maximum magnitude of target.
4.1.2 Heading adjustment (HL OFFSET)
Bearing compensation due to installation can be adjusted.
(1) Change the range scale to 1 NM or more by pressing “+” (or “-”) key on the Operation unit.
(2) Select a visible fixed object as far as possible and measure its bearing using magnetic compass
or equivalent. Measure the bearing of the same target on the radar display. Adjust it according to
the following procedures when both values differ 1 degree or more.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [HL OFFSET] => [VALUE] will show the current
setting of the input value by highlighting the last digit value by the joystick.
(4) Move the joystick up or down to adjust the value to match the bearing value of the target picture
to the compass value.
4-2 0092653004-00
Page 57

MDC-5000 Series Chapter 4 Setup after installation
Too near
Good
Too far
Figure 4.1 Picture display of Trigger Adjustment
(5) Press ENT key to save the adjustment result.
Adjustable value: -180.0 to +180.0
Note: When you use inter-switch mode at first time, please set Heading (HL OFFSET) adjustment of
each antenna. These setting data are memorized in non-volatile memory, and applied
automatically when each antenna is selected.
4.1.3 Transmitting delay time adjustment (TX DELAY)
This adjustment is intended to match the picture on the radar display with the distance of an actual
target by the adjustment of the transmission delay time. For the most accurate adjustment, find a close,
hard, long, straight object such as a quay wall. Select or chose within 100 m an object for the best
result. Transmitting delay time is adjusted in accordance with the following procedures.
(1) Change the range scale to 0.25 NM by pressing “+” (or “-”) key on the Operation unit.
(2) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [TX DELAY] => [VALUE] will show the current
setting of the input value by highlighting the last digit value by the joystick.
(3) Move the joystick up or down to adjust the value to get a straight picture of the straight object in
the display as shown in Figure 4.1.
(4) Press ENT key to save the adjustment result.
Note: When you use inter-switch mode at first time, please set TX DELAY adjustment of each antenna.
These setting data are memorized in non-volatile memory, and applied automatically when each
antenna is selected.
0092653004-00 4-3
Page 58

Chapter 4 Setup after installation MDC-5000 Series
Transmit leak
Figure 4.2 Center spot
4.1.4 Antenna height (ANT HEIGHT)
Set up antenna height from sea level. This adjustment affects the removing sea clutter area. When set
low value, removing sea clutter area will narrow. When set high value, area will wide.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [ANT HEIGHT] => and set antenna height from the
sea level by the joystick, then press ENT key to save the setting.
Setting value: 0 to 100 m
4.1.5 Antenna cable length (ANT CABLE)
This adjustment corrects the echo signal level by the difference of the antenna cable length.
Improper setting of antenna cable length may result in degraded target detection.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [ANT CABLE] => and set cable length by moving the
joystick, then press ENT key to save the setting.
Setting value: 0 to 100 m
Note: When you use inter-switch mode at first time, please set ANT CABLE adjustment cable of each
antenna. These setting data are memorized in non-volatile memory, and automatically when
each antenna is selected.
4.1.6 Main Bang Suppression (MBS)
This setting is utilized to suppress the center spot signal at the middle of the picture as shown in Figure
4.2.
(1) If GAIN mode is AUTO, change to MAN mode.
(2) Set the range scale to S1 pulse, set RAIN at 0 by turning
RAIN knob, set SEA at 0 by turning SEA knob, set GAIN
at 8 by turning GAIN knob, and set BRILL at a maximum
level by turning BRILL knob respectively.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [MBS] =>
[S1] to highlight the last digit value, by moving the
joystick.
(4) Turn GAIN knob to counterclockwise to display center
spot in the middle of the picture.
(5) Move the joystick up or down to increase [MBS] value from 0 with observing the center circle
until the circle is faded out. Press ENT key to save the setting.
(6) Repeat from S2 pulse to L3 pulse as above procedure.
Adjustable value: 0.000 to 4.000
4-4 0092653004-00
Page 59

MDC-5000 Series Chapter 4 Setup after installation
4.1.7 Setup SEA (STC) curve
Depending on the height at which the antenna is installed, it may be necessary to make the following
SEA CURVE correction.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [SEA CURVE] => and select setting level by the
joystick, then press ENT key.
Adjustable value: 1 to 8
Echoes in short range are varied in accordance with antenna height. Use 1 for the lowest antenna and
8 for highest antenna. Actual adjustment of the STC CURVE is done by obtaining a continuous echo
return of sea clutter out to maximum selected range.
Be careful when removing sea clutter in short range as it may also remove small targets.
0092653004-00 4-5
Page 60

Chapter 4 Setup after installation MDC-5000 Series
PICTURE MODE
PROCESS
IR
VID
D e d icated function name RAIN Without SEA and GAIN key
SEA Without RAIN and GAIN key
F1
>
GAIN Without RAIN and SEA key
F2
>
OFF
F3
>
ECHO > TRAIL T/REL
RAIN
>
TRAIL > TRAIL TIME
SEA
>
DISPLAY > STAB MODE TRAIL RESET
GAIN
>
ALARM > TM RESET
TARGET > C UP RESET
NAV TOOL > FERRY MODE ECHO ALARM
MAP > ECHO ALARM EDIT
SYSTEM > VECT T/REL MAP AREA ALARM
VECT TIME NAV LINE CROSS
CPA/TCPA
AUTO ACQ AREA
AUTO ACQ AREA EDIT
OS PAST TRK RESET
AIS
TT DELETE RR
TT ALL DELETE BRG T/REL
GUARD LINE
OS PAST TRK REC SHIP OUTLINE
TARGET TRACK STERN LINE
MAP DISP BARGE ICON
CHART
EVENT CURSOR
EVENT OWN
TLL OUT
TIME
INFO DISP
VECT TIME
Figure 4.3 Function key setup value
4.1.8 Function key usage
For quick function access, there are six dedicated function keys provided on this radar (“F1”, “F2”, “F3”
keys, “RAIN”, “SEA”, “GAIN” knobs).
You can switch to a pre specified function by pressing each key.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [FUNCTION KEY] => [F1] key => press ENT key and
after selecting the setup value.
(2) Follow procedure (1) to setup keys [F2], [F3], [RAIN], [SEA] and [GAIN] by selecting each item and
press ENT key.
(3) Another way to setup each function key is to press and hold desired key until menu selection
shows up on the right side of display. Using joystick and ENT key make a selection and save to
designated function key.
4-6 0092653004-00
Page 61

MDC-5000 Series Chapter 4 Setup after installation
>RANGE ENABLE >RANGE ENABLE >RANGE ENABLE
0.0625 OFF 0.125 ON 0.0625 OFF
0.125 ON 0.25 ON 0.125 ON
0.25 ON 0.5 ON 0.25 ON
0.5 ON 1 OFF 0.5 ON
0.75 ON 1.5 OFF 0.75 ON
1 OFF 2 ON 1 OFF
1.5 ON 3 OFF 1.5 ON
2 OFF 4 ON 2 OFF
3 ON 5 OFF 3 ON
4 OFF 6 OFF 4 OFF
5 OFF 8 ON 5 OFF
6 ON 10 OFF 6 ON
8 OFF 12 OFF 8 OFF
10 OFF 16 ON 10 OFF
12 ON 20 OFF 12 ON
16 OFF 24 OFF 16 OFF
20 OFF 32 ON 20 OFF
24 ON 36 OFF 24 ON
32 OFF 40 OFF 32 OFF
36 OFF 48 OFF 36 OFF
40 OFF 50 OFF 40 OFF
48 ON 64 ON 48 ON
50 OFF 80 OFF 50 OFF
64 OFF 96 OFF 64 OFF
80 OFF 100 OFF 80 OFF
96 OFF 120 OFF 96 OFF
100 OFF 144 OFF 100 OFF
120 OFF 200 OFF 120 OFF
144 OFF 144 OFF
Range unit:NM
Range unit:km
Range unit:sm, kf, ky
MDC-5004
4.1.9 RANGE ENABLE
Following operation can enable suitable ranges.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [RANGE ENABLE]
(2) Select range value and set [ON] or [OFF].
(3) Press ENT key to save the range enable or disable to use.
0092653004-00 4-7
Page 62

Chapter 4 Setup after installation MDC-5000 Series
MDC-5006 / MDC-5012
>MAINTENANCE >MAINTENANCE >MAINTENANCE
>STARTUP >STARTUP >STARTUP
>RANGE ENABLE >RANGE ENABLE >RANGE ENABLE
0.0625 OFF 0.125 ON 0.0625 OFF
0.125 ON 0.25 ON 0.125 ON
0.25 ON 0.5 ON 0.25 ON
0.5 ON 1 OFF 0.5 ON
0.75 ON 1.5 OFF 0.75 ON
1 OFF 2 ON 1 OFF
1.5 ON 3 OFF 1.5 ON
2 OFF 4 ON 2 OFF
3 ON 5 OFF 3 ON
4 OFF 6 OFF 4 OFF
5 OFF 8 ON 5 OFF
6 ON 10 OFF 6 ON
8 OFF 12 OFF 8 OFF
10 OFF 16 ON 10 OFF
12 ON 20 OFF 12 ON
16 OFF 24 OFF 16 OFF
20 OFF 32 ON 20 OFF
24 ON 36 OFF 24 ON
32 ON 40 OFF 32 ON
36 OFF 48 OFF 36 OFF
40 OFF 50 OFF 40 OFF
48 ON 64 ON 48 ON
50 OFF 80 OFF 50 OFF
64 ON 96 ON 64 ON
80 OFF 100 OFF 80 OFF
96 OFF 120 OFF 96 OFF
100 OFF 144 OFF 100 OFF
120 OFF 200 OFF 120 OFF
144 OFF 144 OFF
Range unit:NM
Range unit:km
Range unit:sm, kf, ky
4-8 0092653004-00
Page 63

MDC-5000 Series Chapter 4 Setup after installation
Fig 4.4 Initial range scale setting
MDC-5025
>MAINTENANCE >MAINTENANCE >MAINTENANCE
>STARTUP >STARTUP >STARTUP
>RANGE ENABLE >RANGE ENABLE >RANGE ENABLE
0.0625 OFF 0.125 ON 0.0625 OFF
0.125 ON 0.25 ON 0.125 ON
0.25 ON 0.5 ON 0.25 ON
0.5 ON 1 OFF 0.5 ON
0.75 ON 1.5 OFF 0.75 ON
1 OFF 2 ON 1 OFF
1.5 ON 3 OFF 1.5 ON
2 OFF 4 ON 2 OFF
3 ON 5 OFF 3 ON
4 OFF 6 OFF 4 OFF
5 OFF 8 ON 5 OFF
6 ON 10 OFF 6 ON
8 OFF 12 OFF 8 OFF
10 OFF 16 ON 10 OFF
12 ON 20 OFF 12 ON
16 OFF 24 OFF 16 OFF
20 OFF 32 ON 20 OFF
24 ON 36 OFF 24 ON
32 OFF 40 OFF 32 OFF
36 OFF 48 OFF 36 OFF
40 OFF 50 OFF 40 OFF
48 ON 64 ON 48 ON
50 OFF 80 OFF 50 OFF
64 OFF 96 ON 64 OFF
80 OFF 100 OFF 80 OFF
96 ON 120 OFF 96 ON
100 OFF 144 ON 100 OFF
120 OFF 200 OFF 120 OFF
144 OFF 144 OFF
Range unit:sm, kf, ky
Range unit:NM
Range unit:km
Note: Range unit can be changed by [DISPLAY] => [RANGE UNIT] menu.
0092653004-00 4-9
Page 64

Chapter 4 Setup after installation MDC-5000 Series
High speed rotation is not available in OFF.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [MOTOR HIGH SPEED].
Select high speed rotation range, then press ENT key.
For example, when 6NM is selected and press ENT key.
High speed rotation in 0.0625 to 6NM range
Low speed (normal) rotation in 8 NM or up.
4.1.10 MOTOR HIGH SPEED
Set up when antenna high speed rotation is used.
4.1.11 MOUSE SPEED
This menu sets the operation speed of the USB Mouse/Trackball.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [MOUSE SPEED] => select [FAST], [MEDIUM] or
[SLOW], and press ENT key.
Setting value: FAST, MEDIUM, SLOW
4.1.12 TX HOUR DISP
This radar can display the total transmitting time of the radar at wait or standby mode.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [STARTUP] => [TX HOUR DISP] => select [WAIT] or [STANDBY], and
press ENT key.
WAIT: TX HOUR is displayed during countdown time.
STANDBY: TX HOUR is displayed during standby mode.
4-10 0092653004-00
Page 65

MDC-5000 Series Chapter 4 Setup after installation
Figure 4.6 I/O menu
>I/O
HDG >
Select input source of heading
MAN 0.0°
Manual input heading data
OFFSET 0.0°
Offset value of heading input
STW >
Select input source of STW
MAN 6.6kn
Manual input STW data
COG/SOG >
Select input source of COG/SOG
DLOG 218.3°
Talker device name and course value
DLOG 6.6kn
Talker device name and speed value
POSITION >
Select input source of position data
DGPS 35°15.174N
Talker device name and LAT/LON value
139°48.010E
OFFSET DTM
Input device of positon offset data
MAN 0.000N
The name of position offset value and offset value
0.000E
SET/DRIFT >
Select input source of SET/DRIFT VDR or MAN
MAN 0.0°
Manual input SET data
0.0kn
Manual input DRIFT data
TIME >
Select input source of time ZDA or CLOCK
GPS 01/01/15
Time souce name and date and time
07:57
TIME ZONE
TIME ZONE 00:00
Time zone value
OUTPUT >
Setup NMEA sentences of output
INPUT >
Setup NMEA sentences of input
BAUDRATE >
Setup baud rate
KGC SET >
Setup KODEN GPS compass
SERIAL MONITOR >
Serial monitor of NMEA data
4.2 Setup I/O Interface
For display mode, TT(ATA), true ship’s trail and own ship’s trail, it is necessary to input ship’s bearing
data and ship’s speed data from other devices. In addition, for AIS, mapping function, display of own
ship’s information and display of latitude and longitude, it is necessary to input latitude and longitude
data of own ship’s data. In order to use these data, set the following menu items after connection in
accordance with 3.4 “Cable connection to a Processor unit”.
Note: Refer to “4.2.2 How to use without NMEA input connection” for the method to use without
inputting NMEA data.
Example display: Press MENU key to display “Menu” and select [MAINTENANCE] => [I/O]
0092653004-00 4-11
Page 66

Chapter 4 Setup after installation MDC-5000 Series
4.2.1 Setup TIME
Set up time related items to be displayed in the upper right part of the display.
Select information source of time to be indicated.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [TIME] => [TIME] => [ZDA] or [CLOCK*], and press ENT key.
* CLOCK: Internal clock of the radar
Note:
• When [TIME] sets to [ZDA], and RMC or GGA sentence is received without ZDA, only time data will
be displayed.
• When the battery runs low, the internal clock of the radar will not always work properly. Please
exchange the internal battery. (Refer to “5.4.2 Replacement of Internal Battery”)
In order to use the internal clock of the radar, time set is required.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [TIME] => [TIME] => [CLOCK], and press ENT key.
Set the internal clock for year, month and day by UTC.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [TIME] => [CLOCK SET] => [DATE] => to highlight the value
of [Day/Month/Year]. Move the joystick up or down to match it to the coordinated universal time,
and then press ENT key.
Set the internal clock for time by UTC.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [TIME] => [CLOCK SET] => [TIME] => to highlight the value of
[hour: minute]. Move the joystick up or down to match it to the coordinated universal time, and then
press ENT key.
4-12 0092653004-00
Page 67

MDC-5000 Series Chapter 4 Setup after installation
UTC or LOCAL
How to change
Move cursor on a grey item
UTC or LOCAL, and press
ENT key.
Date Time
Input time difference between local time and UTC.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [TIME] => [TIME ZONE] => to highlight the value of [hour: minute].
Move the joystick up or down to match it to the time difference, and then press ENT key.
Note:
Display “OWN SHIP INFO” method
(1) Press MENU key to display “Menu”.
(2) Select [DISPLAY] => [INFO DISP] => select [UPPER], [MIDDLE1], [MIDDLE2] or [BOTTOM] =>
[OWN SHIP INFO], and press ENT key.
(3) Press MENU key to close “Menu”.
4.2.2 How to use without NMEA input connection
To use the function of this radar effectively, the default is set provided that all external input shall be
connected at the initial status. Therefore, when only basic function of radar (excluding navigation
function, mapping function, display of data, TT (ATA) and AIS, etc.) will be used without connection to
other devices, an alarm with sound is displayed to remind an operator of input of ship’s bearing, ship’s
speed and latitude and longitude. Please use this radar with keeping the ship’s bearing, ship’s speed
and latitude and longitude OFF as follows.
Method of setting
Press MENU key to display “Menu” and set as follows with the joystick.
When HDG is not input (GPS compass and GYRO are not connected):
(1) [ALARM] => [ALARM ON/OFF] => [I/O] => [HDG INPUT] => [OFF], and press ENT key.
When SPD is not input (LOG and GPS are not connected):
(1) [ALARM] => [ALARM ON/OFF] => [I/O] => [SPD INPUT] => [OFF], and press ENT key.
When LAT/LON is not input (GPS and PLOTTER are not connected):
(1) [ALARM] => [ALARM ON/OFF] => [I/O] => [LAT/LON INPUT] => [OFF], and press ENT key.
0092653004-00 4-13
Page 68

Chapter 4 Setup after installation MDC-5000 Series
4.2.3 Set up Heading interfaces
4.2.3.1 Connection of KODEN GPS compass
Connect GPS compass to the J6 port.
Press MENU key to display “Menu” and set as follows with the joystick.
(1) [MAINTENANCE] => [I/O] => [HDG] => [HDG] => [AUTO], and press ENT key.
Initialize GPS compass (DATA 1 or DATA 2 in KGC-222, DATA 2 in KGC-1 and J6 port of the radar are
optimally reset.)
(1) [MAINTENANCE] => [I/O] => [KGC SET] => [INITIAL] => [GO], and press ENT key.
Note: With this initialization, port connected to the radar of GPS compass is set at 38400 bps, 50 ms for
signal cycle, and HDT, GGA, VTG, DTM and ZDA for signal type.
Compensate angles of GPS compass
When mounting direction of GPS compass has been out of alignment, compensation of the
misalignment allows GPS compass to output HDT signals as follows.
(1) [MAINTENANCE] => [I/O] => [KGC SET] => [BRG CORR] => [0.0°], and then select the last digit of
entry frame for a numerical value and set with ENT key after pointing at the angle to be
compensated by moving the joystick up and down.
4.2.3.2 Connection of other device
In case of a gyro with analogue signal output such as step signal or synchronous signal (Refer to “3.4.5
Connecting a Gyro converter unit or THD), insert a gyro converter unit between them, convert the
analogue signal into that of the NMEA signal of 38400bps, and then input the signal into the J3, J5 or
J6 port of this device.
When a THD (a gyro with output based on IEC 61162-2) or a GPS compass from another manufacturer
is connected (Refer to “3.4.4 Connecting a Gyro converter unit or THD”), connect the output based on
IEC 61162 directly to the J3, J5 or J6 port of this radar. Setting can be performed with pressing MENU
key as follows:
(1) [MAINTENANCE] => [I/O] => [HDG] => [HDG] => [AUTO], and press ENT key.
Set values: AUTO, THS, HDT, HDG, HDM, VTG, RMC, RMA, MAN
Caution: In case of either HDG, HDM, VTG, RMC, RMA or Manual is selected, TT (ATA) function
and true trail will not always work properly.
4-14 0092653004-00
Page 69

MDC-5000 Series Chapter 4 Setup after installation
LOCAL 21/01/16 10:18
HDG GYRO
230°
LOCAL 21/01/16 10:18
HDG GYRO
240°
4.2.3.3 How to input the heading value by manual
The heading data can be set by manual for the purpose of an examination or repair.
Setting can be performed with pressing MENU key as follows:
(1) [MAINTENANCE] => [I/O] => [HDG] => [HDG] => [MAN], and press ENT key.
(2) [MAINTENANCE] => [I/O] => [HDG] => [MAN] => [VALUE] will show the current setting of the input
value by highlighting the last digit value by the joystick.
(3) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 359.9°
Note: The manual input data is displayed with yellow color.
4.2.3.4 Compensation of angle of ship’s bearing
When there is any constant error in input ship’s bearing, it can be used after compensated as follows:
(1) Press MENU key to display “Menu”.
[MAINTENANCE] => [I/O] => [HDG] => [OFFSET] => [VALUE] will show the current setting of the
input value by highlighting the last digit value by the joystick.
(2) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 359.9°
Example: OFFSET value: 10°
4.2.4 Setting of STW to be used for SEA STAB
Select an input device for STW to be used for TT (ATA), AIS, TM, True Trail and OS Past track at
stabilized speed against water.
In case of speed meter against water with pulse output such as LOG, the output shall be put of this unit
after conversion of the signal into that of NMEA signal through LOG converter unit inserted between
them.
Speed signal from GPS compass or GPS can be also input. For setting of this, use of [AUTO] is
recommended as shown below.
(1) [MAINTENANCE] => [I/O] => [STW] => [STW] => [AUTO], and press ENT key.
Set values: AUTO, VHW, VBW, VTG, RMC, RMB, RMA, MAN, CURRENT
0092653004-00 4-15
Page 70

Chapter 4 Setup after installation MDC-5000 Series
MAN: This function is intended to input speed values manually. [MAN] is provided as an emergency
measure, because many functions of radar become unavailable when the speed meter is faulty.
However, when [MAN] is selected, AIS is not available.
CURRENT: This means that STW is calculated from ground speed data and SET/DRIFT data inputted
from VDR sentence or by manual.
4.2.4.1 How to input the STW value by manual
(1) [MAINTENANCE] => [I/O] => [STW] => [MAN] => [VALUE] will show the current setting of the input
value by highlighting the last digit value by the joystick.
(2) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 100.0 kn
Note: The manual input data is displayed with yellow color.
4.2.5 Setting of COG/SOG to be used for GROUND STAB
Select an input device of COG/SOG to be used for TT (ATA), AIS, True Trail and PAST POSN at
stabilized speed against ground. It is necessary to connect to GPS, Navigation device (VTG, RMC and
RMA), 2-axis SDME (VBW) or current meter (CURRENT).
(1) [MAINTENANCE] => [I/O] => [COG/SOG] => [COG/SOG] => [AUTO], and press ENT key.
Set values: AUTO, VBW, VTG, RMC, RMA, MAN, CURRENT
CURRENT: COG/SOG is calculated from STW and SET/DRIFT data.
Caution: When a ship has been brought to or is sailing, VTG, RMC and RMA of GPS may wamble in
the course. Therefore, the speed vector of TT (ATA) may also wamble. In this case, use it at
the stabilized speed against water.
4.2.5.1 How to input the COG value by manual
(1) [MAINTENANCE] => [I/O] => [COG/SOG] => [COG MAN] => [VALUE] will show the current setting
of the input value by highlighting the last digit value by the joystick.
(2) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 359.9°
Note: The manual input data is displayed with yellow color.
4.2.5.2 How to input the SOG value by manual
(1) [MAINTENANCE] => [I/O] => [COG/SOG] => [SOG MAN] => [VALUE] will show the current setting
of the input value by highlighting the last digit value by the joystick.
(2) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 100.0 kn
Note: The manual input data is displayed with yellow color.
4-16 0092653004-00
Page 71

MDC-5000 Series Chapter 4 Setup after installation
4.2.6 Setting of SET/DRIFT to be used for CURRENT mode
When [CURRENT] is selected in “4.2.4” (STW) and “4.2.5” (COG/SOG), the device to input SET/DRIFT
is selected.
Select the sensor of SET/DRIFT when [CURRENT] is selected at STW and COG/SOG.
(1) [MAINTENANCE] => [I/O] => [SET/DRIFT] => [SET/DRIFT] => [VDR] or [MAN], and press ENT
key.
Set values: VDR, MAN
MAN: Use SET/DRIFT value manually input.
Note: AIS display does not work when [MAN] is selected.
4.2.6.1 How to input the SET/DRIFT value by manual
(1) [MAINTENANCE] => [I/O] => [SET/DRIFT] => [SET MAN] => [VALUE] will show the current setting
of the input value by highlighting the last digit value by the joystick.
(2) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 359.9°
(3) [MAINTENANCE] => [I/O] => [SET/DRIFT] => [DRIFT MAN] => [VALUE] will show the current
setting of the input value by highlighting the last digit value by the joystick.
(4) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 0.0 to 100.0 kn
Note: The manual input data is displayed with yellow color.
4.2.7 Setting of latitude and longitude (POSITION)
When AIS and MAP functions are used, it is necessary to input position data from GPS or navigation
devices.
(1) [MAINTENANCE] => [I/O] => [POSITION] => [POSITION] => Select [AUTO], [GNS], [GGA], [GLL],
[RMC], [RMA], or [MAN], and press ENT key.
Set value: AUTO, GNS, GGA, GLL, RMC, RMA, MAN,
MAN: Manual input function as an emergency measure when positioning device such as GPS is faulty.
4.2.7.1 How to input the POSITION value by manual
(1) [MAINTENANCE] => [I/O] => [POSITION] => [POSITION] => [MAN], and press ENT key.
(2) [MAINTENANCE] => [I/O] => [POSITION] => [LAT MAN] => [VALUE] will show the current setting
of the input value by highlighting the last digit value by the joystick.
(3) Move the joystick up or down to set the value. Press ENT key to save the set result.
0092653004-00 4-17
Page 72

Chapter 4 Setup after installation MDC-5000 Series
(4) [MAINTENANCE] => [I/O] => [POSITION] => [LON MAN] => [VALUE] will show the current setting
of the input value by highlighting the last digit value by the joystick.
(5) Move the joystick up or down to set the value. Press ENT key to save the set result.
Note: The manual input data is displayed with yellow color.
4.2.7.2 Compensation of POSITION data
When the geodetic system in navigator and that in the map used are different, the position may become
different even with the same values of latitude and longitude. In this case, input of [OFFSET] allows
these positions to be matched.
[MAINTENANCE] => [I/O] => [POSITION] => [OFFSET] => [OFFSET] => [DTM] or [MAN], and press
ENT key.
Set values: DTM and MAN
MAN: Setting is done by manual input of values.
AIS cannot be displayed because radar DATUM differs from DATUM of AIS when you used position
offset.
4.2.7.3 How to input the compensation of position data by manual
(1) [MAINTENANCE] => [I/O] => [POSITION] => [OFFSET] => [OFFSET] => [MAN], and press ENT
key.
(2) [MAINTENANCE] => [I/O] => [POSITION] => [OFFSET] => [LAT MAN] => [VALUE] will show the
current setting of the input value by highlighting the last digit value by the joystick.
(3) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 1.000S to 1.000N
(1) [MAINTENANCE] => [I/O] => [POSITION] => [OFFSET] => [LON MAN] => [VALUE] will show the
current setting of the input value by highlighting the last digit value by the joystick.
(5) Move the joystick up or down to set the value. Press ENT key to save the set result.
Setting value: 1.000W to 1.000E
For setting in [MAN] mode, set the radar in N-UP mode to display map. Transmit radar and display the
echo. Then, comparing the landscape of the radar image with the map, input offset values of latitude
and longitude with the joystick. When a value is input, it moves right and left. Compensation can be
easily applied.
4-18 0092653004-00
Page 73

MDC-5000 Series Chapter 4 Setup after installation
>OUTPUT J3 >OUTPUT J5 >OUTPUT J6
DTM 0.0sec DTM 0.0sec DTM 0.0sec
EVE 1.0sec EVE 0.0sec EVE 0.0sec
GLL 0.0sec GLL 0.0sec GLL 0.0sec
HBT 5.0sec HBT 0.0sec HBT 0.0sec
HDT 0.0sec HDT 0.0sec HDT 0.0sec
OSD 1.0sec OSD 0.0sec OSD 0.0sec
POS 0.0sec POS 0.0sec POS 0.0sec
ROT 0.0sec ROT 0.0sec ROT 0.0sec
RSD 1.0sec RSD 0.0sec RSD 0.0sec
THS 0.0sec THS 0.0sec THS 0.0sec
TLB 5.0sec TLB 0.0sec TLB 0.0sec
TLL 0.0sec TLL 0.0sec TLL 0.0sec
TTD 0.0sec TTD 0.0sec TTD 0.0sec
TTM 0.0sec TTM 1.0sec TTM 0.0sec
VBW 0.0sec VBW 0.0sec VBW 0.0sec
VDR 0.0sec VDR 0.0sec VDR 0.0sec
VHW 0.0sec VHW 0.0sec VHW 0.0sec
VTG 0.0sec VTG 0.0sec VTG 0.0sec
ZDA 0.0sec ZDA 0.0sec ZDA 0.0sec
Highlight numeral value and enter desired period for desired sentence.
No output is available by 0.0 sec setting.
ENT key press validates the value.
4.2.8 Setting of serial output
Following serial data sentences can be output from NMEA port (J3, J5 or J6).
Make selection by following steps.
Select [MAINTENANCE] => [I/O] => [OUTPUT] => [OUTPUT J3], [OUTPUT J5] or [OUTPUT J6].
Then indicate following submenu by moving the joystick to the right.
0092653004-00 4-19
Page 74

Chapter 4 Setup after installation MDC-5000 Series
>INPUT Port number
J3 J5 J6 O1 O2 J3 : NMEA
BWC
- - - - - ALL J5 : NMEA
DBT
- - - - - ALL J6 : NMEA
DPT
- - - - - ALL
DTM
- - - - - ALL
GGA
● ● - - - ALL
GLC
- - - - - ALL
GLL
● - - - - ALL
GNS
- - - - - ALL
HBT
- - - - - ALL
HDG
- - - - - ALL
HDM
- - - - - ALL
HDT
- - - ● - ALL
MTW
- - - - - ALL
RMA
- - - - - ALL
RMB
- - - - - ALL
RMC
- - - - - ALL
ROT
- - - - - ALL
RTE
● - - - - ALL
THS
- - - - - ALL
VBW
- - ● - - ALL
VDR
- - - - - ALL
VHW
- - - - - ALL
VTG
● - - - - J3
WPL
● - - - - ALL
XTE
- - - - - ALL
ZDA
- ● - - - ALL
Selection cursor
moves within
sub-menu when
joystick is turned
up and down.
Select the sentence (here,
GGA) to be assigned and
turn the joystick right, to
display sub-menu.
Move the joystick up and
down to select the port to
be assigned (here, J5) and
press [ENT] key for setting.
When a signal is
input in a port,
the mark of ● is
displayed.
However, it is
not displayed if
the format is not
matched.
Name of the assigned port
is displayed.
Here it is J3.
ALL
J3
J5
J6
Fig 4.7 Input signals and ports
4.2.8.1 Setting of TLL output
The position of marks and a cursor can be output to external devices.
Select the kinds of TLL sentences to be output.
(1) [MAINTENANCE] => [I/O] => [OUTPUT] => [TLL OUT] => Select [TT], [MARK] or [TARGET], and
press ENT key.
Set values: TT, MARK, TARGET
TT: The position of automatic tracking target captured is output with the cycle set in “4.2.8 Setting of
serial output”.
MARK: The positions marked in drawing will be output at every marking.
TARGET: TLL output is set on the function key. Every press of the function key allows the position of
cursor to be output as TLL on the screen.
4.2.9 Limiting of type of signal to input port
When the device is connected with multiple nautical instruments, the same signals from HDT and GLL,
etc. are input from several input ports. If the values of these input signals are different, interference that
may cause jumping of ship’s bearing and LAT/LON may occur. In these cases, an input port can be
assigned for each signal type.
Select as [MAINTENANCE] => [I/O] => [INPUT] and display the setting sub-menu as follows:
Setting sub-menu
4-20 0092653004-00
Page 75

MDC-5000 Series Chapter 4 Setup after installation
4.2.10 Changing baud-rate of input/output ports of navigation devices.
When the data is correctly input in each port and is not displayed on the display, the baudrate of signals
(4800 or 38400bps) may be unmatched. In this case, display [INPUT] menu mentioned in 4.2.9, and
confirm that a mark is displayed at the intersection point of the input sentence and the input port. When
a mark is not displayed, set each baudrate of input/output so as to match with those of connected
sensors with input sentences.
Default value per port is set as follows:
J3: 38400bps
J5: 4800bps
J6: 4800bps
Example of change of setting: J3 port 38400 bps => 4800 bps
Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [BAUDRATE] => [J3] => [4800] and set with ENT key.
4.2.10.1 Setting all I/O ports automatically
This radar can set the format of all I/O ports automatically by following procedure.
(1) Press MENU key to display “Menu”.
[MAINTENANCE] => [I/O] => [BAUDRATE] => [AUTO SETUP] => [GO], and press ENT key.
About 30 sec. later all I/O ports can be set by input signals connected to external devices.
4.2.11 Setup KGC (GPS compass)
When connect KGC (KODEN GPS compass) to the J6 port, please set KGC to set format and output
sentences.
Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [KGC SET] => [INITIAL] => [GO], and press ENT key.
Data 1 or Data 2 in KGC-222 and J6 port of the radar are optimally set.
Caution: With this initialization, Data 1 or Data 2 (port connected to the radar) of KGC-222 is set at
38400 bps for baud rate, 50ms for signal cycle, and HDT, GGA, VTG, DTM and ZDA for signal type.
Bearing correction of KGC-222
When the mounting direction of KGC-222 has been out of alignment, compensation of the
misalignment allows KGC-222 to output HDT signal as follows.
(1) Press MENU key to display “Menu”.
0092653004-00 4-21
Page 76

Chapter 4 Setup after installation MDC-5000 Series
>ALL
J3
J5
J6
AIS
Select [MAINTENANCE] => [I/O] => [KGC SET] => [BRG CORR] =>
(2) Select the last digit of entry frame for a numerical value, then press ENT key after pointing at the
angle to be compensated by moving the joystick up and down.
4.2.12 Serial monitor
Serial input signals can be checked by the window of serial data monitor.
Press MENU key to display “Menu”.
Select [MAINTENANCE] => [I/O] => [SERIAL MONITOR] => select [J3], [J5], [J6], [AIS] or [ALL] =>
Input data of selected port will be displayed.
[AIS] port means AIS data from AIS device.
[ALL] means that the data of all ports will be displayed at the same time.
4.3 Setup SECTOR MUTE mode (Cannot use while transmitting)
SECTOR MUTE is the function enabling user to stop transmission to designated direction when there
are hazardous objects near antenna location or near a human body.
When using SECTOR MUTE, it takes longer time to detect optimum value in auto tuning at the start of
transmission and change of range. Therefore manual tuning is recommended to use when using
SECTOR MUTE.
SECTOR MUTE mode ON or OFF
Press MENU key to display “Menu”.
Select [MAINTENANCE] => [SECTOR MUTE] => [MUTE] => [ON or OFF] => and press ENT key.
Setup starting angel setup of SECTOR MUTE
Press MENU key to display “Menu”.
Select [MAINTENANCE] => [SECTOR MUTE] => [START] => select 0 to 359°, and press ENT key.
Setup ending angle of SECTOR MUTE
Press MENU key to display “Menu”.
Select [MAINTENANCE] => [SECTOR MUTE] => [END] => select 0 to 359°, and press ENT key.
4-22 0092653004-00
Page 77

MDC-5000 Series Chapter 4 Setup after installation
4.4 Setup PRESET
4.4.1 Setup RAIN MIN and MAX mode
There are two modes of MAN and CFAR in anti-rain clutter mode.
Change method of MAN and CFAR.
Press the RAIN knob, or put a cursor on the indicator of MAN or CFAR upper right of the display and
press ENT key.
4.4.1.1 RAIN MIN (MAN and CFAR mode)
RAIN MIN is intended to adjust the preset minimum value of anti-rain clutter. This is a function even
when anti-rain clutter suppression knob is set at minimum.
This function has also effect to moderate the effect against turned angle of the knob and to make
adjustment easy. This setting can be applied to the entire range.
MAN mode
(1) Check MAN indication of RAIN mode from upper right of the display. If RAIN mode is CFAR,
change to MAN mode. If GAIN mode is AUTO, change to MAN mode. If SEA mode is AUTO,
change to MAN mode.
(2) Set RAIN at 0 by turning RAIN knob, set SEA at a moderate level by turning SEA knob, set GAIN
at 8 by turning GAIN knob and set BRILL at a maximum level by turning BRILL knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [RAIN MIN] and highlight the last digit of the numerical
entry frame.
(4) Move the joystick up and down to change the value, and press ENT key when bondens and
seaway buoys have reduced small enough in size on the display.
Setting value is 0 to 4095: Initial setting is 0
CFAR mode
(1) Check CFAR indication of RAIN mode from upper right of the display. If RAIN mode is MAN,
change to CFAR mode. If SEA mode is AUTO, change to MAN mode.
(2) Set RAIN at 0 by turning RAIN knob, set SEA at a moderate level by turning SEA knob and set
BRILL at a maximum level by turning BRILL knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [RAIN MIN] and highlight the last digit of the numerical
entry frame.
(4) Move the joystick up and down to change the value, and press ENT key when bondens and
seaway buoys have reduced small enough in size on the display.
Setting value is 0 to 4095: Initial setting is 0
0092653004-00 4-23
Page 78

Chapter 4 Setup after installation MDC-5000 Series
4.4.1.2 RAIN MAX (MAN and CFAR mode)
This is intended to adjust the maximum value of anti-rain clutter. When the effect of anti-rain clutter
suppression is weak or strong, this can be used.
MAN mode
(1) Check MAN indication of RAIN mode from upper right of the display. If RAIN mode is CFAR,
change to MAN mode. If GAIN mode is AUTO, change to MAN mode. If SEA mode is AUTO,
change to MAN mode.
(2) Set RAIN at 10 by turning RAIN knob, set GAIN at 10 by turning GAIN knob and set SEA at 0 by
turning SEA knob in rainfall.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [RAIN MAX] and highlight the last digit of the numerical
entry frame.
(4) Move the joystick up and down to change watching the display, and press ENT key when large
blocks of rain clutter become smaller points and just before small boats and seaway buoys will
disappear.
Setting value is 0 to 4095.
CFAR mode
(1) Check CFAR indication of RAIN mode from upper right of the display. If RAIN mode is MAN,
change to CFAR mode. If SEA mode is AUTO, change to MAN mode.
(2) Set RAIN at 10 by turning RAIN knob and set SEA at 0 by turning SEA knob in rainfall.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [RAIN MAX] and highlight the last digit of the numerical
entry frame.
(4) Move the joystick up and down to change watching the display, and press ENT key when large
blocks of rain clutter become smaller points and just before small boats and seaway buoys will
disappear.
Setting value is 0 to 4095.
4.4.2 Setup SEA MIN and MAX mode
There are two modes of MAN and AUTO in sea clutter suppression.
Change method of MAN and AUTO.
Press the SEA knob, or put a cursor on the indicator of MAN or AUTO upper right of the display and
press ENT key.
4-24 0092653004-00
Page 79

MDC-5000 Series Chapter 4 Setup after installation
4.4.2.1 SEA MIN (MAN and AUTO mode)
This setting is a function to make the value set under Sea suppression effective even when SEA is set
at a minimum level by turning SEA knob. Due to the raise of the minimum value, this function allows the
effect against the angle of the turning of the knob to be moderated and the adjustment with the knob to
be made easier. This adjustment can be used in common for the entire range. Please carry out the
adjustment at mild state of sea.
MAN mode
(1) Check MAN indication of SEA mode from upper right of the display. If SEA mode is AUTO, change
to MAN mode. If GAIN mode is AUTO, change to MAN mode. If RAIN mode is CFAR, change to
MAN mode.
(2) Set the range scale at 0.75 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set GAIN at 8 by turning GAIN knob and set BRILL at a maximum level by turning BRILL
knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [SEA MIN] and highlight of the last digit of entry frame of
numerical value by moving the joystick.
(4) Move the joystick up and down to change the value, erase sea clutter on the display that may be
generated by dust and birds, and set not to erase bondens and seaway buoys. Press ENT key for
setting.
Setting value is 0 to 4095: Initial setting is 0
AUTO mode
(1) Check AUTO indication of SEA mode from upper right of the display. If SEA mode is MAN, change
to AUTO mode. If GAIN mode is AUTO, change to MAN mode. If RAIN mode is CFAR, change to
MAN mode.
(2) Set the range scale at 0.75 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set GAIN at 8 by turning GAIN knob and set BRILL at a maximum level by turning BRILL
knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [SEA MIN] and highlight of the last digit of entry frame of
numerical value by moving the joystick.
(4) Move the joystick up and down to change the value, erase sea clutter on the display that may be
generated by dust and birds, and set not to erase bondens and seaway buoys. Press ENT key for
setting.
Setting value is 0 to 4095: Initial setting is 0
0092653004-00 4-25
Page 80

Chapter 4 Setup after installation MDC-5000 Series
4.4.2.2 SEA MAX (MAN and AUTO mode)
The use of manual and auto SEA suppression allows the suppression effect at the maximum level.
MAN mode
(1) Check MAN indication of SEA mode from upper right of the display. If SEA mode is AUTO, change
to MAN mode. If GAIN mode is AUTO, change to MAN mode. If RAIN mode is CFAR, change to
MAN mode.
(2) Set the range scale at 12 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set GAIN at 8 by turning GAIN knob and set BRILL at a maximum level by turning BRILL
knob.
(3) Press VRM1 key to display and set VRM at 8.0NM by turning VRM knob.
(4) Put the cursor on IR1, IR2 or IR3 on the display, then press ENT key to select OFF. When IR is
turned OFF, white noise on the display increases. Keep GAIN at 8.
(5) Set SEA at 10 (a maximum level) by turning SEA knob.
(6) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [SEA MAX] and highlight of the last digit of entry frame
of numerical value by moving the joystick.
(7) Move the joystick up and down watching white noise on the display to increase the set value of
[SEA MAX] from 0. When the white noise on the display disappears from the area between the
center and 8 NM, stop the movement of the joystick and press ENT key for setting.
(8) After completion of all setting, return IR1, IR 2 or IR3.
The set value of [SEA MAX] is applied to the entire ranges.
AUTO mode
(1) Check AUTO indication of SEA mode from upper right of the display. If SEA mode is MAN, change
to AUTO mode. If GAIN mode is AUTO, change to MAN mode. If RAIN mode is CFAR, change to
MAN mode.
(2) Set the range scale at 12 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set GAIN at 8 by turning GAIN knob and set BRILL at a maximum level by turning BRILL
knob.
(3) Press VRM1 key to display and set VRM at 8.0NM by turning VRM knob.
(4) Put the cursor on IR1, IR2 or IR3 on the display, then press ENT key to select OFF. When IR is
turned OFF, white noise on the display increases. Keep GAIN at 8.
(5) Set SEA at 10 (a maximum level) by turning SEA knob.
(6) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [SEA MAX] and highlight of the last digit of entry frame
of numerical value by moving the joystick.
4-26 0092653004-00
Page 81

MDC-5000 Series Chapter 4 Setup after installation
(7) Move the joystick up and down watching white noise on the display to increase the set value of
[SEA MAX] from 0. When the white noise on the display disappears from the area between the
center and 8 NM, stop the movement of the joystick and press ENT key for setting.
(8) After completion of all setting, return IR1, IR 2 or IR3.
4.4.3 Setup GAIN MIN and MAX mode
Display sensitivity of the screen against the GAIN knob is set. When the sensitivity against turning of
the knob is too high or too low, it can be adjusted with knob.
There are two modes of MAN and AUTO in gain sensitivity control.
Change method of MAN and AUTO.
1 Move cursor on the MAN or AUTO display (whichever is shown) at right side of [GAIN] on the top
of the display.
2 Press ENT key to change AUTO or MAN as appropriate.
4.4.3.1 GAIN MIN (MAN and AUTO mode)
This setting is a function to make the value set under GAIN sensitivity control effective even when GAIN
is set at a minimum level by turning GAIN knob. Due to the raise of the minimum value, this function
allows the effect against the angle of the turning of the knob to be moderated and the adjustment with
the knob to be made easier. This adjustment can be used in common for the entire range.
MAN mode
(1) Check MAN indication of GAIN mode from upper right of the display. If GAIN mode is AUTO,
change to MAN mode. If SEA mode is AUTO, change to MAN mode. If RAIN mode is CFAR,
change to MAN mode.
(2) Set the range scale at 24 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set PICTURE 1 mode, set GAIN at 0 by turning GAIN knob and set BRILL at a maximum
level by turning BRILL knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [GAIN MIN] and highlight of the last digit of entry frame
of numerical value by moving the joystick.
(4) Move the joystick up and down to change the value, only the highest signal levels are presented.
Press ENT key for setting.
Setting value is 0 to 4095.
0092653004-00 4-27
Page 82

Chapter 4 Setup after installation MDC-5000 Series
AUTO mode
(1) Check AUTO indication of GAIN mode from upper right of the display. If GAIN mode is MAN,
change to AUTO mode. If SEA mode is AUTO, change to MAN mode. If RAIN mode is CFAR,
change to MAN mode.
(2) Set the range scale at 24 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set PICTURE 1 mode, set GAIN at 0 by turning GAIN knob and set BRILL at a maximum
level by turning BRILL knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [GAIN MIN] and highlight of the last digit of entry frame
of numerical value by moving the joystick.
(4) Move the joystick up and down to change the value, only the highest signal levels are presented.
Press ENT key for setting.
Setting value is 0 to 4095.
4.4.3.2 GAIN MAX (MAN and AUTO mode)
This setting is a function to make the value set under GAIN sensitivity control effective even when GAIN
is set at a maximum level by turning GAIN knob.
MAN mode
(1) Check MAN indication of GAIN mode from upper right of the display. If GAIN mode is AUTO,
change to MAN mode. If SEA mode is AUTO, change to MAN mode. If RAIN mode is CFAR,
change to MAN mode.
(2) Set the range scale at 24 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set PICTURE 1 mode, set GAIN at a maximum level by turning GAIN knob and set BRILL at
a maximum level by turning BRILL knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [GAIN MAX] and highlight the last digit of entry frame of
numerical value by moving the joystick.
(4) Watching the white noise on the display, change the setting value for gain with moving the joystick
up and down, and press ENT key at an appropriate point for setting.
Setting value is 0 to 4095.
AUTO mode
(1) Check AUTO indication of GAIN mode from upper right of the display. If GAIN mode is MAN,
change to AUTO mode. If SEA mode is AUTO, change to MAN mode. If RAIN mode is CFAR,
change to MAN mode.
4-28 0092653004-00
Page 83

MDC-5000 Series Chapter 4 Setup after installation
(2) Set the range scale at 24 NM, set SEA at 0 by turning SEA knob, set RAIN at 0 by turning RAIN
knob, set PICTURE 1 mode, set GAIN at a maximum level by turning GAIN knob and set BRILL at
a maximum level by turning BRILL knob.
(3) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [GAIN MAX] and highlight of the last digit of entry frame
of numerical value by moving the joystick.
(4) Watching the white noise on the display, change the setting value for gain with moving the joystick
up and down, and press ENT key at an appropriate point for setting.
Setting value is 0 to 4095.
4.4.4 Setup GAIN OFFSET mode
This is a function to adjust the gain sensitivity difference of every range when range scale is changed.
This setting is performed by every each range scale.
For example: When gain sensitivity of 3NM looks low (weak).
(1) Set range scale 3NM.
(2) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [GAIN OFFSET] => increase setting value.
(3) Change range scale up and down to check the gain sensitivity difference.
Setting value is 0 to 4095: Initial setting is 0.
Note: This function is effective about the change of the transmission pulse width.
4.4.5 Setup SEA OFFSET mode
This is a function to adjust the sea clutter suppression difference of every range when range scale is
changed.
This setting is performed by every each range scale.
For example: When sea clutter suppression of 3NM looks low (weak).
(1) Set range scale 3NM.
(2) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [PRESET] => [SEA OFFSET] => increase setting value.
(3) Change range scale up and down to check the sea clutter suppression difference.
Setting value is 0 to 4095: Initial setting is 0.
Note: This function is effective about the change of the transmission pulse width.
4.5 SAVE and LOAD of Setup data / MAP (Cannot be used while transmitting)
By saving setup data to the internal memory or external memory, the initial setup and all settings are
saved, in the event that the radar needs to be reinitialized or some changes been made, user can go
0092653004-00 4-29
Page 84

Chapter 4 Setup after installation MDC-5000 Series
back to the original settings by restoring from memory.
Backup of setup data should be saved after initial setup.
In case of malfunction of display where initialization must be done, restore of backup data saved at the
time of original setup will bring all proper settings and turning setup back to normal operation.
4.5.1 Internal save of setup data
Save setup data to the internal memory:
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [BACKUP] => [SETUP SAVE] => [GO] and press ENT key.
Restore setup data from the internal memory:
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [BACKUP] => [SETUP LOAD] => [GO] and press ENT key.
4.5.2 External save of setup and map data (Cannot be performed while
transmitting)
To save setup and map data externally, this information can be later used to restore after a possible
malfunction.
The external memory uses an SD memory card.
CAUTION: Please do not use the SD memory card which is loaded with software program files.
Save setup and map data to SD card:
(1) Insert SD memory card in the upper card reader of the Processor unit.
(2) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [BACKUP] => [SD CARD] => select [SETUP SAVE], [MARK SAVE],
[TGT TRACK SAVE] or [OWN TRACK SAVE] => [GO], and press ENT key.
When SD memory card not inserted, [SD CARD] menu is shaded menu and cannot be operated.
Restore setup and map data from SD card:
(1) Insert SD card that was used to store settings in above procedure in the upper card reader of the
Processor unit.
(2) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [BACKUP] => [SD CARD] => select [SETUP LOAD], [MARK LOAD],
[TGT TRACK LOAD] or [OWN TRACK LOAD] => [GO], and press ENT key.
When SD memory card not inserted or no data found on the card, [SD CARD] menu is shaded
menu and cannot be operated.
4-30 0092653004-00
Page 85

MDC-5000 Series Chapter 4 Setup after installation
4.5.3 Parameter reset
Use this function as means to return the radar to its default settings as it was at first power on.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [BACKUP] => [PARAMETER RESET] => [GO], and press ENT key.
4.5.4 MAP, Target Track and Past Position reset
Use this function as means to delete all the map, target track and past position data from radar internal
memory.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [BACKUP] => [MAP/PAST RESET] => [GO], and press ENT key.
4.6 TOTAL Hour and TX Hour (Cannot use while transmitting)
TOTAL HOUR menu indicates the total operating time of the radar.
Following operation can be used to reset total hours to 0.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [TOTAL HOUR] => [RESET] => and press ENT key.
TX HOUR menu indicates the total transmitting time of the radar.
This is useful information to use when exchanging radar parts. Use this hour information to judge
magnetron life expectancy.
Reset after components have been exchanged.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [TX HOUR] => [RESET] => and press ENT key.
4.7 MENU Setup
MENU SETUP menu can be used to simplify full menu and turn off the items in full menu that are not
used. This is often used to remove not needed menu items for simple operation of the radar.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [MENU SETUP] => [GO] => and press ENT key.
Setup menu display will display.
(2) Select menu item to set ON or OFF => select [X] or [○] => and press ENT key.
(3) When setup finish, press MENU key. Menu display will disappear.
Press MENU key again. [X] mark menu items are not displ ayed.
0092653004-00 4-31
Page 86

Chapter 4 Setup after installation MDC-5000 Series
>ECHO >ECHO
PICTURE MODE
×
IR OFF
PROCESS
×
VIDEO CONTRAST 3
EXPANSION
×
NOISE REJ OFF
IR
○
COLOR REJ >
VIDEO CONTRAST
○
PULSE WIDTH >
NOISE REJ
○
PICTURE RESET >
COLOR REJ
○
PULSE WIDTH
○
PICTURE RESET
○
PICTURE ENABLE
×
>ECHO
○
Figure 4.8
4.8 Version confirmation
Currently installed firmware version can be found by using following menu operation.
(1) Press MENU key to display “Menu”.
Select [MAINTENANCE] => [VERSION] =>
4.9 How to update the system program
(1) Prepare SD memory card with latest program.
File name: radar
File type: MOT
(2) Turn off the power.
(3) Insert SD memory card in the upper card reader of the Processor unit.
(4) Press POWER ON/OFF key to turn on, radar will start update procedure automatically.
Message of “LOADING IN PROGRESS” “PLEASE DO NOT POWER OFF” and time bar will be
displayed.
EBL1, EBL2 and BRILL, VRM1, VRM2 and PANEL key’s lamps flash red.
Few minutes later, when program update is complete, “LOADING COMPLETE” “PLEASE EJECT
SD CARD” message appears on the display.
(5) Eject SD memory card from the card reader, and turn off automatically.
4-32 0092653004-00
Page 87

MDC-5000 Series Chapter 4 Setup after installation
VECTOR [TRUE]
VECTOR [REL]
This vector shows the course/speed of a
target only, regardless of own ship.
This vector adds the course/speed of a target
to the course/speed of own ship.
Direction that own ship moves
Direction that the target moves
Target
Own ship
Own ship
Target
Vector
Own ship
Target
Vector
4.10 Setup VECTOR on tracked targets
The course and speed are indicated as vector after tracking is established.
Two types of display mode are available: relative display (REL) and true display (TRUE).
(Initial setting: REL)
1 Press MENU key to display “Menu”.
Select [TARGET] => [VECT] => [TRUE/REL] => select [TRUE] or [REL], and press ENT key.
TRUE: This vector shows the course/speed of a target only, regardless of own ship.
REL: This vector adds the course/speed of a target to the course/speed of own ship.
Example:
<Own ship position and Target position>
<Radar display>
Refer to 4.1 Common setting “VECTOR REL/TRUE” of Operation manual.
0092653004-00 4-33
Page 88

- This page intentionally left blank.-
Page 89

MDC-5000 Series Chapter 5 Troubleshooting and on board repair
●ALARM A 9999999
UTC 20/05/15 12:34
DGPS XXXX 999999
MESSAGE. . . . . . . . . . . . . . . .
(ALARM and WARNING blinks until acknowledging alarm)
Date when warning and alarm
is generated.
Error message
Error device ID
Figure 5.1 Alarm, Warning and Caution display
Instance number
Alarm ID
Category
Icon and Priority:
ALARM / WARNING / CAUTION
Chapter 5 Troubleshooting and on board repair
In this chapter we provide troubleshooting procedures to find malfunction parts on a ship.
5.1 Necessary information at the time of repair request
Please note the following items:
(1) Ship name and phone number of the satellite communication system if equipped
(2) Product type name
(3) Product serial number
(4) Software version name described in the [MAINTENANCE] Menu.
(5) A following port of call, arrival schedule, and agency name
(6) Status of malfunction and results of diagnostics on a ship
5.2 Provided self diagnostic facilities
The alarm display on the display and lamp for internal status is provided for self-diagnostics of this
device.
5.2.1 Alarm display and how to cancel
Alarm display may appear at the lower right of the radar display as shown in Figure 5.1 when a
malfunction or operation error has been detected in the device.
Abnormalities are categorized as [Alarm], [Warning] and [Caution]. When alarm display actually
appears and there is something wrong with radar, record the alarm details by type, location and status
and press OFF key. The alarm sound and display will disappear. Multiple errors may be displayed one
by one. Record all alarms and press OFF key for every alarm. The types of alarm, warning and caution
are shown in Table 5.1.
0092653004-00 5-1
Page 90

Chapter 5 Troubleshooting and on board repair MDC-5000 Series
Contents
Cause
A W 190
1
57
AIS targets exceed the
limit.
Number of AIS targets exceeding the
maximum 500 has been input.
A W 190
2
54
Tracked targets exceeded
the limit.
Number of tracked targets in TT (ATA)
exceeded the maximum 50.
A W 190
3
56
AIS input targets
exceeded the limit.
Number of AIS targets exceeding the
maximum 500 has been input.
A A 191
1
3
Tracked target exceeded
the CPA/TCPA limit.
Tracked target has turned into dangerous
target.
A A 191
2
8
AIS target exceeded the
CPA/TCPA limit.
AIS target has turned into dangerous
target.
A W 192
2
5
Auto acquisition of a radar
target.
Captured a target entered into auto
acquisition area.
A W 192
4
10
Auto activation of an AIS
target.
A sleeping target has been activated.
A W 193
1 1 Tracked target is lost.
TT (ATA) has been lost.
A W 193
2 7 AIS target is lost.
AIS target has been lost.
A W 193
3 2 Ref tracked target is lost.
Ref tracked target has been lost.
B W 194
1
22
HDG is unavailable.
THS or HDT are not inputted.
B W 194
2
23
SDP is unavailable.
VBW, VTG, RMA or RMC are not inputted.
B W 194
3
24
COG/SOG is unavailable.
COG/SOG is not inputted.
B W 194
4
25
SET/DRIFT data is
unavailable.
VDR is not inputted.
B W 194
5
26
LAT/LON data is
unavailable.
GLL or GGA, GNS, RMC, RMA are not
inputted.
B W 194
6
27
DATUM data is
unavailable.
DTM is not input.
B W 194
7
28
TIME data is unavailable.
ZDA or RMC, GGA are not input.
B C 194
8
60
AIS no OS COG/SOG
data.
Own ship’s data that is necessary for AIS
are not input.
5.2.1.1 Alarm display list
Table 5.1 Alarm, Warning and Caution display list of radar
Category
Priority (A: ALARM, W: Warning, C: Caution)
ID number (0-9999: IMO, 10000-9999999: Maker)
Instance number
ALR number
5-2 0092653004-00
Page 91

MDC-5000 Series Chapter 5 Troubleshooting and on board repair
B W 194
9
61
AIS no data.
There is no AIS data.
VDM is not input from AIS.
B C 194
13
29
HDG is manual.
There is not heading signal.
B C 194
14
30
SDP is manual.
There is not speed signal.
B C 194
15
31
COG/SOG is manual.
There are not ground course and speed
signal.
B C 194
16
32
SET/DRIFT is manual.
There is not tide signal.
B C 194
17
33
LAT/LON is manual.
There are not latitude and longitude signal.
B C 194
18
80
Receive alert of any signal
or sensor in use.
Receive alert of any signal or sensors in
use.
B C 194
25
109
AIS no data.
There is no AIS data.
VDM is not input from AIS.
B C 194
26
110
SPD is unavailable.
VBW, VTG, RMA or RMC are not inputted.
B C 194
27
111
COG/SOG is unavailable.
COG/SOG is not inputted.
B W 999
1
89
Test alert only.
Under alert test.
A W 10000
1
53
Echo area alarm detected.
Images are detected in echo alarm area.
A W 10000
2
15
Echo map area alarm
detected.
Images were detected in map area.
B C 10000
3
11
Activated AIS target
without HDG or COG.
There is neither ship’s bearing nor fairway
of AIS active target input data to HDG or
COG.
B C 11000
1
14
Nav line exceeded.
Own ship crossed the Nav line.
B C 11000
2
62
Received AIS message.
Received AIS message to OWN ship.
B C 12000
1
16
Change to relative
bearing.
True bearing is not inputted.
B C 12000
2
17
Change to relative vector.
VBW, VTG or VDR are not inputted.
B C 12000
3
18
Change to relative past
position.
VBW, VTG or VDR are not inputted.
B C 12000
4
19
Change to head up.
THS, HDT, HDM or VTG, RMA, RMC are
not inputted.
B C 12000
5
20
Change EBL origin
position.
THS, HDT, HDM or VTG, RMA, RMC are
not inputted.
B C 12000
6
34
Change to sea
stabilization.
Ship’s bearing: THS, HDT, HDM, VTG
Course against water: VBW
Speed: VBW, VTG, VHW are not input.
B C 12000
9
21
Change to off process.
THS, HDT, HDM or VTG, RMA, RMC are
not inputted.
0092653004-00 5-3
Page 92

Chapter 5 Troubleshooting and on board repair MDC-5000 Series
B C 12000
10
35
Change to ground
stabilization
Speed: VBW or VHW is not input.
Change to ground stabilization. Check
VBW or VHW sentence.
B C 12000
11
36
Change SOG input to
EPFS
Change SOG input source from SDME
(VBW) to EPFS (VTG).
B C 16000
1
47
Inter-switch not
connected.
NAV ports between master and slave are
not connected.
B C 16000
2
59
AIS alarm signal.
Alarm for abnormality is input in AIS alarm
terminal of AIS port or the terminals are
open.
B C 16000
3
66
No WGS84 DATUM.
Input geodetic system is not WGS84.
A A 17000
1
41
Antenna not connected.
Connector of Antenna may not be
connected to Antenna, or Scanner unit
may be faulty.
A A 17000
2
42
Antenna magnetron
current abnormal.
Magnetron may be at the end of life or
transmission high voltage fuse blown.
A A 17000
3
43
Antenna magnetron
heater abnormal.
Something is wrong with magnetron or
Scanner unit.
A A 17000
4
44
Antenna magnetron high
voltage abnormal.
High voltage fuse for transmission blown.
A A 17000
5
45
Antenna high voltage
abnormal.
High voltage fuse for transmission blown.
A A 17000
6
46
Motor voltage abnormal.
Motor voltage fuse blown.
A
A
17000
7
48
Azimuth abnormal.
BP signal from Scanner unit is not
received.
May be fault in angle detecting sensor in
Scanner unit or poor connection at
connector.
A A 17000
8
49
Head line signal abnormal.
SHF signal from Scanner unit is not
received.
May be fault in SHF sensor in Scanner unit
or rotation of antenna may be stopped.
A A 17000
9
50
Trigger abnormal.
Trigger from Scanner unit is not received.
A A 17000
10
51
Radar video abnormal.
IF video from Scanner unit is not received.
A A 18000
1
13
Panel not connected.
No communication between operating
panel is available. Connector (J9) is
disconnected.
B W 18001
1
37
Flash memory erase &
write error.
Flash memory erase and write error.
B W 18001
2
38
Flash memory erase error.
Flash memory erase error.
5-4 0092653004-00
Page 93

MDC-5000 Series Chapter 5 Troubleshooting and on board repair
B W 18001
3
39
Flash memory write error.
Flash memory write error.
B W 18001
4
40
Flash memory checksum
error.
Flash memory checksum error.
B C 18002
1
71
SD card problem.
SD card may be broken.
B C 18002
2
72
SD card not ready.
There is not SD card.
B C 18002
3
73
SD card write protected.
SD card is protect mode.
B C 18002
4
74
SD card not enough free
space.
Memory of SD card is not left.
B C 18002
5
75
Illegal data.
The data does not agree.
0092653004-00 5-5
Page 94

Chapter 5 Troubleshooting and on board repair MDC-5000 Series
OPERATION NOTE
MESSAGE
Figure 5.2 Operation note display
Table 5.2 Operation note
Contents
Cause
Tracked target full.
Acquired tracked target beyond the maximum
tracking number.
Tracked target no data.
Deleted tracked target as there wear no tracked
targets.
Tracked target out of range.
Acquired tracked target beyond operating
distance set for targets.
Pre heating.
Operated transmission key during pre-heating
countdown.
No HDG, LAT/LON signal.
As signals of ship’s bearing, latitude/longitude
had not been input, functions that need those
signals have been disabled.
No HDG signal.
As signals of ship’s bearing had not been input,
functions that need ship’s bearing signal were
disabled.
No SPD signal.
As speed signal had not been input, functions
that needs speed signal were disabled.
Map data full.
More than the specified number of COAST
LINE, NAV LINE, ROUTE, EVENT MKR and
AREA tried to attempt to register in map
function.
3 short audible signals, and after sec. this
message will disappear.
5.2.1.2 Operation note display
Operation note display may appear at the lower right of the radar display as shown in Figure 5.2 when
an operation error has been detected in the device.
When operation note display actually appears and there is something wrong with radar operation.
The type of operation note are shown in Table 5.2.
5-6 0092653004-00
Page 95

MDC-5000 Series Chapter 5 Troubleshooting and on board repair
Cursor off.
Cursor is not displayed.
Inter-switch changed the mode.
During inter-switch connection, one Display unit
switched over inter-switch mode.
No off center.
In the maximum range, off center function was
disabled.
Tracking malfunction. BRG T
As the result of TT test, the accuracy of bearing
has exceeded the reference.
Tracking malfunction. RNG
As the result of TT test, the accuracy of range
has exceeded the reference.
Tracking malfunction. CPA
As the result of TT test, the accuracy of CPA
has exceeded the reference.
Tracking malfunction. TCPA
As the result of TT test, the accuracy of TCPA
has exceeded the reference.
Tracking malfunction. T CRS
As the result of TT test, the accuracy of true
course has exceeded the reference.
Tracking malfunction. T SPD
AS the result of TT test, the accuracy of true
speed has exceeded the reference.
Time to trial manoeuvre is less than 30 seconds.
The remaining time of trial manoeuvre is less
than 30 seconds.
Reference target overload.
Attempted to acquire reference target beyond 3.
Do not use MAN COG/SOG.
Cannot use AIS with COG/SOG data inputted
by manual.
Do not use REF COG/SOG.
Cannot use AIS with COG/SOG data calculated
by reference target.
Do not use CURRENT COG/SOG.
Cannot use AIS with SET/DRIFT data inputted
by manual.
Do not use MAN STW.
Cannot use AIS with speed data inputted by
manual.
Do not use MAN POSITION.
Cannot use AIS with own ship position data
inputted by manual.
Time error.
Cannot use AIS with no time data.
Do not use MAN OFFSET POSITION.
Cannot use AIS with offset positon inputted by
manual.
0092653004-00 5-7
Page 96

Chapter 5 Troubleshooting and on board repair MDC-5000 Series
Failure status
Possible cause
Measure
No power.
1. Power cable is disconnected.
2. Operation unit cable is
disconnected.
3. Supply voltage is out of range.
4. Main power fuse is blown.
1. Connect power cable firmly
and secure connector.
2. Connect operation cable
firmly and secure connector.
3. Use proper power source.
4. Change fuse with new one.
Power is applied but no
display
1. Monitor cable is disconnected.
2. The monitor is not powered on, or
the input selection is not VGA.
3. Connector of internal cable is
disconnected.
1. Connect monitor cable firmly
and secure connector.
2. Turn on the monitor, or select
monitor input as VGA.
3. Confirm by a serviceman.
Error status
Possible cause
Measure
No radar echo is
displayed.
1. Receiver is detuned.
2. Video contrast adjustment error
3. Failure of transceiver
1. Readjust by referring to “4.1.1
Tune adjustment”.
2. Readjust by GAIN, SEA or
FTC knobs.
3. Request repair
Radar echo is too weak.
1. Receiver is detuned.
2. Failure of Magnetron or MIC
(front-end)
1. Readjust by referring to “4.1.1
Tune adjustment”.
2. Request repair
Error message “Head
line signal abnormal.” is
displayed.
1. No heading line signal input.
1. Check [BP/HG] signal between
an Antenna Scanner unit and a
Processor unit.
Antenna does not
rotate.
1. Motor fuse is blown.
2. Motor power is not supplied.
3. Inter-switch mode is difference.
1. Replace fuse with a new one.
2. Check motor power
connection.
3. Set inter-switch mode to
master mode.
5.3 Malfunction diagnostics
This chapter specifies necessary information required troubleshooting and repair of the radar system.
5.3.1 Malfunction detection step
As a first step of on board repair, refer to the following tables describing outlines of malfunction
diagnostics procedure.
Table 5.2 basic malfunctions
Table 5.3 possible malfunctions
5-8 0092653004-00
Page 97

MDC-5000 Series Chapter 5 Troubleshooting and on board repair
Can Operation unit operate?
Is the model name seen during
preheating countdown time?
Power “ON” the Radar.
Yes
Start transmitting
Are radar echos normal?
Does short buzzer sound?
Are radar echos displayed?
Go to [5.3.2.7 Data such as heading, speed,
latitude/longitude cannot be received].
Go to [5.3.2.4 Operation unit error].
Go to [5.3.2.5 No radar echo].
Go to [5.3.2.3 No response from the
antenna unit].
No
No
Yes
No
Yes
Yes
Yes
Yes
Other errors
Is the NMEA serial input data
displayed?
Is the AIS data displayed?
No
Go to [5.3.2.6 Weak sensitivity of the radar
echo].
No
No
No
Go to [5.3.2.8 AIS].
Go to [5.3.2.2 Cannot turn on the power].
5.3.2 Malfunction diagnostics flow chart
The following malfunction analysis chart can be used by service personnel for malfunction diagnostics
and location of defective module. This chart shows flow chart of diagnostics for basic malfunction
troubleshooting.
5.3.2.1 Initial malfunction diagnostics
0092653004-00 5-9
Page 98

Chapter 5 Troubleshooting and on board repair MDC-5000 Series
Is the power cable
connected?
Is the Operation unit cable
connected to the Processor
unit correctly?
Is main fuse blown?
No
Yes
Correct the connection.
No
Correct the connection.
No
Yes
Remove antenna cable
connector from the display.
Is main fuse blown again?
Is power supply voltage
within normal range?
21.6 to 41.6 VDC
No
Reconnect to proper
power supply.
Does the voltage of
J710-17, 19, 21 pins on the
main logic PCB (E73-700*)
+12VDC ?
Yes
No
Power Supply PCB
(E63-600*) failure
Is fuse properly rated?
Yes
Exchange fuse.
Is inboard power polarity
correct?
Yes
No
Yes
Reconnect correctly
No
Is there not a contact point
in the antenna cable?
No
Power supply PCB
(E63-600*) failure
Yes
Antenna cable failure
No
Antenna unit failuer
Yes
No
Connect connectors
correctly
Yes
Is power supple capacity
enough?
No
Change power supply
Do all connectors connect
properly?
Yes
Main logic PCB
(E73-700*) failure
Yes
*Subject to version change
5.3.2.2 Cannot turn on the power
5-10 0092653004-00
Page 99

MDC-5000 Series Chapter 5 Troubleshooting and on board repair
Is “NOT CONNECTED”
displayed in MENU>
MAINTENANCE> BITE>
ANT MONITOR menu?
Is the antenna cable
connection correct?
Is the voltage J7-3 of
antenna connector +12V?
Yes
Yes
Set “INDEPENDENT
MASTER”.
No
Connect antenna cable
correctly.
Yes
No
Is “INDEPENDENT
MASTER” displayed in
MENU> SYSTEM>
INTER-SWITCH menu?
No
Not support antenna is
connected.
Yes
Power supply PCB
(E63-600*) failure.
Go to Antenna unit failure.
No
*Subject to version change
5.3.2.3 No response from the antenna unit
0092653004-00 5-11
Page 100

Chapter 5 Troubleshooting and on board repair MDC-5000 Series
Cannot operate all keys?
Is “Panel not connected”
message displayed in
Alarm message area at
lower right of the display?
Confirm which keys and
encoders break down by
MENU> MAINTENANCE>
BITE> PANEL TEST.
No
Yes
Main logic PCB
(E73-700*) failure
No
No
Is the LED on Operation
unit turned on and the
buzzer sounds?
Yes
Yes
Operation unit failure
Operation unit failure
*Subject to version change
5.3.2.4 Operation unit error
5-12 0092653004-00
 Loading...
Loading...