

Kinova GEN2 User Manual

User Guide
®
KINOVA
Gen2 Ultra
lightweight robot

Contents
Introduction............................................................................................................................................................... 4
About this document...............................................................................................................................................4
Symbols, definitions, and acronyms..................................................................................................................4
Warranty......................................................................................................................................................................4
Safety / Warnings.....................................................................................................................................................5
Disclaimer.................................................................................................................................................................... 5
General Information.................................................................................................................................................6
Normal use definition..............................................................................................................................................6
Electromagnetic interference from radio wave sources.............................................................................7
Markings and labels................................................................................................................................................ 8
Packing materials..................................................................................................................................................... 8
Robot components and specifications...............................................................................................................9
4 DoF Components...................................................................................................................................................9
6 DoF Curved Wrist Components........................................................................................................................9
6 DoF Spherical Wrist Components................................................................................................................. 10
7 DoF Spherical Wrist Components..................................................................................................................10
Robot external connectors..................................................................................................................................10
Robot specifications............................................................................................................................................... 11
Installation and setup...........................................................................................................................................14
Mechanical mounting of the robot...................................................................................................................14
Electrical integration..............................................................................................................................................15
Integrating a new tool (optional)......................................................................................................................16
Controls integration...............................................................................................................................................18
Operating / controlling the robot..................................................................................................................... 19
Kinova joystick controller.....................................................................................................................................19
Joystick movements and modes..............................................................................................................19
Operating principles and Cartesian mode........................................................................................... 20
Home / Retract positions...........................................................................................................................21
Operating the robot via joystick.............................................................................................................. 21
Joystick LED feedback.................................................................................................................................25
Controlling the robot using Kinova software............................................................................................... 27
Controlling the arm using the Kinova API......................................................................................................29
Robot control.......................................................................................................................................................... 30
Control modes overview......................................................................................................................................30
Control features......................................................................................................................................................30
Singularity Avoidance................................................................................................................................. 30
Self-collisions auto-avoidance................................................................................................................ 33
7 DoF Spherical Null space motion........................................................................................................33
Protection zones...........................................................................................................................................33
Rotating frame / Fixed frame.................................................................................................................. 34
Usable workspace........................................................................................................................................34
Admittance control...................................................................................................................................... 35
Torque Control............................................................................................................................................... 36

Robot limits..............................................................................................................................................................40
Joint speed and utilization limits........................................................................................................... 40
Software position limits of actuators................................................................................................... 41
Software position limitations of fingers..............................................................................................42
Guidance for advanced users.............................................................................................................................43
Kinematics Parameters........................................................................................................................................43
Basic geometric parameters - 4 DoF.................................................................................................... 43
Basic geometric parameters - 6 DoF curved wrist.......................................................................... 44
Alternate geometric parameters - 6 DoF curved wrist.................................................................. 46
Basic geometric parameters - 6 DoF spherical wrist......................................................................48
Basic geometric parameters - 7 DoF spherical wrist...................................................................... 50
Classic DH parameters - 4 DoF............................................................................................................... 52
Classic DH parameters - 6 DoF curved wrist..................................................................................... 53
Classic DH parameters - 6 DoF spherical............................................................................................54
Classic DH parameters - 7 DoF spherical............................................................................................ 55
Directions of joints in angular space.....................................................................................................56
Setting zero position and setting torque sensors zero.............................................................................57
Actuator accelerometers information............................................................................................................ 58
Maintenance and troubleshooting................................................................................................................... 60
Cleaning, maintenance and disposal...............................................................................................................60
Updating robot firmware.....................................................................................................................................60
Kinova gripper removal........................................................................................................................................63
Kinova gripper installation................................................................................................................................. 64
Troubleshooting / FAQs........................................................................................................................................65
Contacting support................................................................................................................................................ 66
Appendix - Kinova joystick reference..............................................................................................................68
3-axis mode joystick controls reminder........................................................................................................ 68
2-axis mode joystick controls reminder........................................................................................................ 68
KINOVA® Gen2 Ultra lightweight robot User Guide 4
Introduction
About this document
This document contains information on the installation and operation of the KINOVA® Gen2
Ultra lightweight robot.
Read all instructions before using this product.
Read all warnings on the product and in this guide.
Follow all instructions.
Keep these instructions for future reference.
This document contains information regarding product setup and operation. It is intended for:
• Kinova product end users
• Field service, customer support and sales employees of authorized Kinova distributors
Symbols, definitions, and acronyms
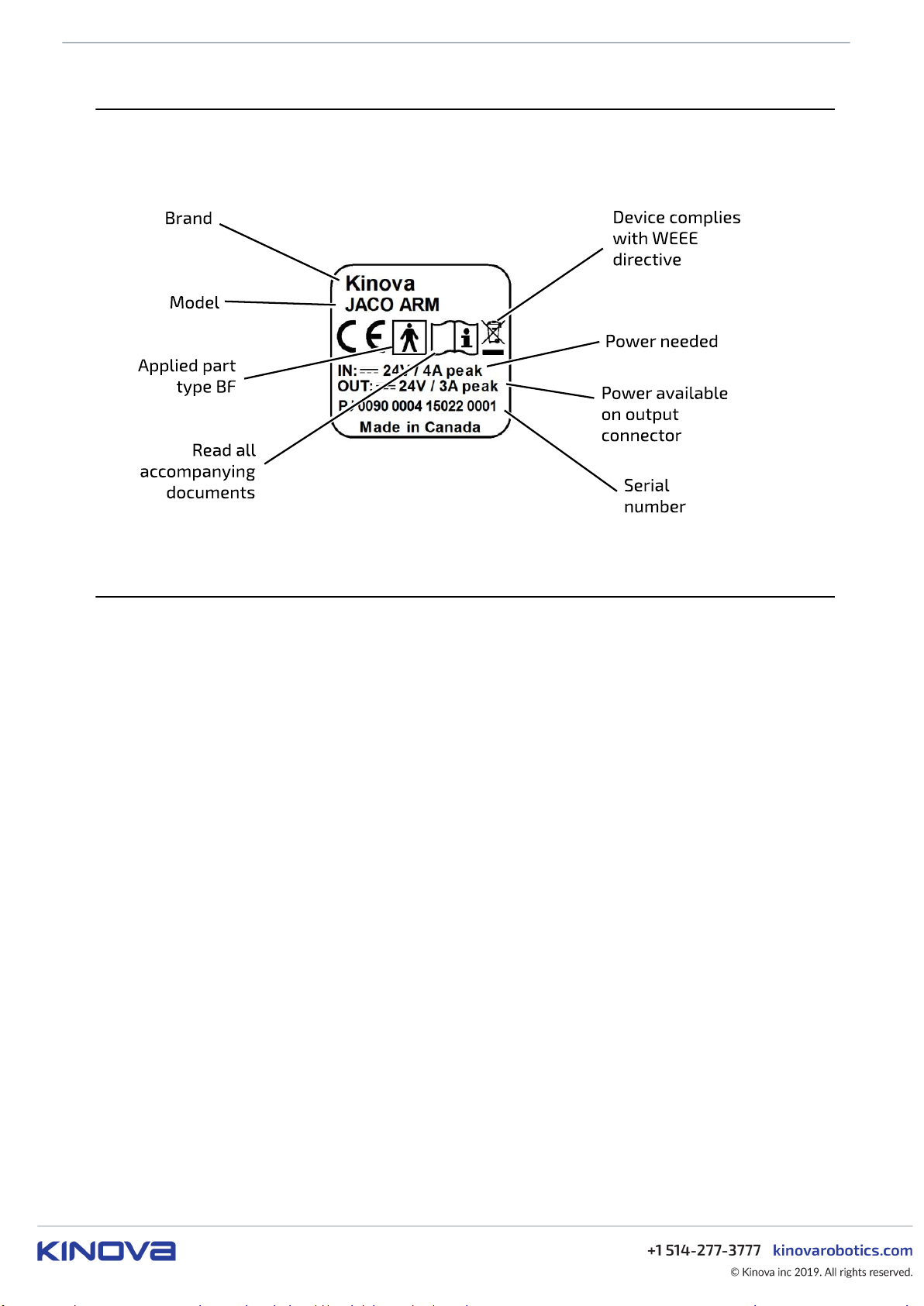
Important information regarding the safety related to the product and the user.
Tip on the maintenance, operation and manipulation of Kinova’s products.
Refer to accompanying documents.
Direct current.
Alternating current.
Operating temperature range.
Compliance with WEEE2 directive.
Compliance with ROHS3 directive.
Type BF Applied Part device.
Warranty
This section describes the Kinova warranty terms.
KINOVA® Gen2 Ultra lightweight robot User Guide 5
Subject to the terms of this clause, Kinova warrants to End User that the Products are free of defects in
materials and workmanship that materially affect their performance for a period of two (2) years from the
date Kinova ships the Products to the End User ("Delivery Date").
Kinova agrees to repair or replace (at Kinova's option) all Products which fail to conform to the relevant
warranty provided that:
1. Notification of the defect is received by Kinova within the warranty period specified above.
2. Allegedly defective Products are returned to Kinova, at the End User’s expense, with Kinova's prior
authorization within thirty (30) days of the defect becoming apparent.
3. The Products have not been altered, modified or subject to misuse, incorrect installation, maintenance,
neglect, accident or damage by excessive current or used with incompatible parts
4. The End User is not in default under any of its obligations under this Agreement.
5. Replacement Products must have the benefit of the applicable warranty for the remainder of the
applicable warranty period.
If Kinova diligently repairs or replace the Products in accordance with this section, it will have no further
liability for a breach of the relevant warranty.
Allegedly defective Products returned to Kinova in accordance with this contract will, if found by Kinova
on examination not to be defective, be returned to End User and Kinova may a charge a fee for examination
and testing.
The warranty cannot be assigned or transferred and is to the sole benefit of the End User.
Where the Products have been manufactured and supplied to Kinova by a third party, any warranty granted
to Kinova in respect of the Products may be passed on to the End User.
Kinova is entitled in its absolute discretion to refund the price of the defective Products in the event that
such price has already been paid.
Safety / Warnings
It is not recommended to use the robot under heavy rain or snow.
Never use the Home / Retract function when carrying liquid. The home position is preset and the wrist
may rotate and drop the liquid.
Do not manipulate cutting, very sharp or any dangerous tools or objects with the robot.
When the power is turned off, the robot will fall down and may cause damage to itself, depending on
its position at the time of disconnection. Be sure to support its wrist before turning the power off.
Do not force the fingers beyond their maximal opening. This could damage some internal components.
Do not immerse any part of the robot under water or snow.
When lifting weight near the maximum load and reach, and you receive a warning, put down the object
in the gripper, bring back the robot to Home or Retract position and wait until the warning goes away before
using it again.
Do not block the robot movement when it is performing a Retract position trajectory.
Disclaimer
KINOVA®and Kinova’s logo are trademarks of Kinova Inc., herein referred to as Kinova. All other brand and
product names are trademarks or registered trademarks of their respective corporations.
KINOVA® Gen2 Ultra lightweight robot User Guide 6
The mention of any product does not constitute an endorsement by Kinova. This manual is furnished under a
lease agreement and may only be copied or used within accordance with the terms of such lease agreement.
Except as permitted by such lease agreement, no part of this publication may be reproduced, stored in
any retrieval system, or transmitted, in any form or by any means, electronic, mechanical, recording, or
otherwise, without prior written consent of Kinova.
The content of this manual is furnished for informational use only, is subject to change without notice, and
should not be construed as a commitment by Kinova. Kinova assumes no responsibility or liability for any
errors or inaccuracies that may appear in this document.
Changes are periodically made to the information herein; these changes will be incorporated into new
editions of this publication. Kinova may make improvements and/or changes in the products and/or
software programs described in this publication at any time.
Address any questions or comments concerning this document, the information it contains or the product
it describes through the Kinova website support page:
www.kinovarobotics.com/support
Kinova may use or distribute whatever information you supply in any way it believes appropriate without
incurring any obligations to you.
General Information
The KINOVA® Gen2 Ultra lightweight robot is a light-weight robot composed of four, six, or seven inter-linked
segments. Through the controller or through a computer, the user can move the robot in three-dimensional
space and grasp or release objects with the gripper (if a gripper is installed).
Do not modify equipment without the authorization of the manufacturer.
The Normal Use definition contains some information fundamental to the proper operation of the
robotic arm.
It is not recommended to use the arm under heavy rain or snow.
Normal use definition
This section describes the normal use of the robot.
The definition of a normal use of the robot includes that you can lift, push, pull or manipulate a maximum
load of:
• Continuously 2.6 kg from minimum to middle reach for 6 DoF, 6 DoF-S, and 7 DoF-S (45-49 cm
distance between the actuator #2 and the load, depending on the configuration) and 4.4 kg from
minimum to middle reach for the 4 DoF (35 cm distance between actuator #2 and the load).
• Temporary 2.2 kg from middle to full reach for 6 DoF, 6 DoF-S, 7 DoF-S (90-98 cm distance between
actuator #2 and the load, depending on the configuration) and 3.5 kg from middle to full reach for 4
DoF (75 cm distance between actuator #2 and the load).
The robot is designed to be able to hold objects in the environment of the user, but it is a manipulator that in
some positions and loads near the maximum reach and maximum loads holds for a long period, it can heat.
When this occurs, before overheating and being dangerous for either the user or the robot, red lights on
the joystick will blink. This is a warning. Simply put down any object in the gripper, and bring back the robot
to the HOME or RETRACTED positions and wait until the warning goes away before using the robot.
If you don’t use a Joystick in your application, make sure to read all the error statuses and temperature of
all actuators modules via the API to ensure that they do not go higher than recommended parameters. If
this occurs, the robot should be held in an idle position near the base for a certain time without any object
in the gripper to cool down the robot.
When lifting weight near the maximum load and reach, if the red lights of the controller blinks, put
down the object in the gripper, and bring back the robot to HOME or RETRACTED position and wait until
the warning goes away before using it.
KINOVA® Gen2 Ultra lightweight robot User Guide 7
Note: During normal operation, the joints are subject to heating. The joints are normally covered with
plastic rings which will protect the user from any danger that may be occurred by the heating of the metal
parts.
The fingers of the robot are made flexible in order to protect the internal mechanism. When using the
fingers to push on objects, the user must take special care not flex the fingers beyond their maximal opening
as this could damage the internal mechanism.
Do not force the fingers beyond their maximal opening as this could damage some internal
components.
Electromagnetic interference from radio wave sources
This section describes electromagnetic interference considerations for the robot.
Even if the product complies with all relevant standards, your robot may still be susceptible to
electromagnetic interference (EMI), which is interfering electromagnetic energy (EM) emitted from
sources such as radio stations, TV stations, amateur radio (Ham) transmitters, two way radios, and cellular
phones. The interference (from radio wave sources) can cause the product to stop moving for a period of 10
seconds. In this case, the device will simply re-initialize and you will be able to continue to use it. In extremely
rare case, it can also permanently damage the control system.
The intensity of the interfering EM energy can be measured in volts per meter (V/m). The product can resist
EMI up to certain intensity. This is called “immunity level”. The higher the immunity level is, the greater is the
protection. At this time, current technology is capable of achieving at least a 20 V/m immunity level, which
would provide useful protection from the more common sources of radiated EMI.
There are a number of sources of relatively intense electromagnetic fields in the everyday environment.
Some of these sources are obvious and easy to avoid. Others are not apparent and exposure is unavoidable.
However, we believe that by following the warnings listed below, your risk to EMI will be minimized.
The sources of radiated EMI can be broadly classified into three types:
1. Gripper-held portable transceivers (e.g. transmitters-receivers with the antenna mounted directly on the
transmitting unit, including citizens band (CB) radios, walkie-talkie, security, fire and police transceivers,
cellular phones, and other personal communication devices). Some cellular phones and similar devices
transmit signals while they are ON, even if not being actively used.
2. Medium-range mobile transceivers, such as those used in police cars, fire trucks, ambulances and taxis.
These usually have the antenna mounted on the outside of the vehicle.
3. Long-range transmitters and transceivers, such as commercial broadcast transmitters (radio and TV
broadcast antenna towers) and amateur (Ham) radios. Other types of gripper-held devices, such as
cordless phones, laptop computers, AM/FM radios, TV sets, CD players, cassette players, and small
appliances, such as electric shavers and hair dryers, so far as we know, are not likely to cause EMI problems
to your device.
Because EM energy rapidly becomes more intense as one move closer to the transmitting antenna (source),
the EM fields from gripper-held radio wave sources (transceivers) are of special concern. It is possible
to unintentionally bring high levels of EM energy very close to the control system while using these
sorts of devices. Therefore, the warnings listed below are recommended to reduce the effects of possible
interference with the control system.
Do not operate gripper-held transceivers (transmitter-receivers), such as citizens band (CB) radios, or
turn ON personal communication devices, such as cellular phones, while the device is turned ON.
Be aware of nearby transmitters, such as radio or TV stations, and try to avoid coming close to them.
Be aware that adding accessories or components, close to the device may make it more susceptible
to EMI.
Report all incidents of unintended shut down to your local distributor, and note whether there is a
source of EMI nearby.
KINOVA® Gen2 Ultra lightweight robot User Guide 8
Markings and labels
This section describes markings and labels on the robot.
Please note that these labels may slightly differ from the ones accompanying your device depending of your
country. The following figure depicts the information about the label affixed on the robot controller.
Figure 1: Robot label
Packing materials
The product packing material can be disposed of as recyclable material.
Metal parts
Metal parts can be disposed of as recyclable scrap metal.
Electrical components, circuit boards, and carbon fiber
Please contact your local distributor for information regarding disposal of such parts. You can also address
questions directly to Kinova through our website (see Contacting Support).
KINOVA® Gen2 Ultra lightweight robot User Guide 9
Robot components and specifications
This section describes the different configurations available for the robotic arms.
For Innovation applications, the robot is available in four configurations:
• 4 degrees of freedom (DoF)
• 6 degrees of freedom (DoF) curved wrist
• 6 degrees of freedom (DoF) spherical wrist
• 7 degrees of freedom (DoF) spherical wrist
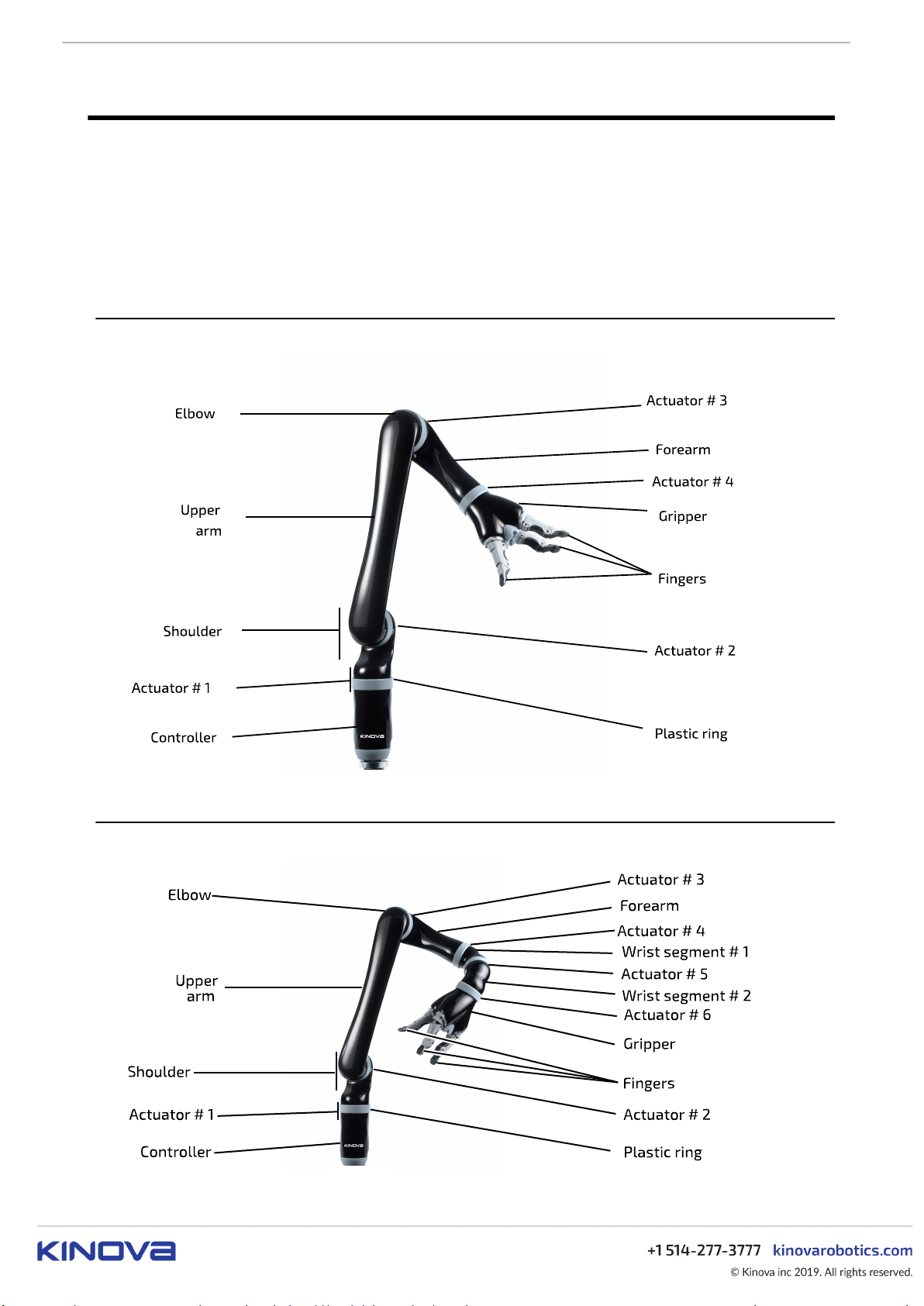
4 DoF Components
This section shows the components of the 4 DoF robot.
6 DoF Curved Wrist Components
This section shows the components of the 6 DoF curved wrist robot.
Figure 2: Robot components
KINOVA® Gen2 Ultra lightweight robot User Guide 10
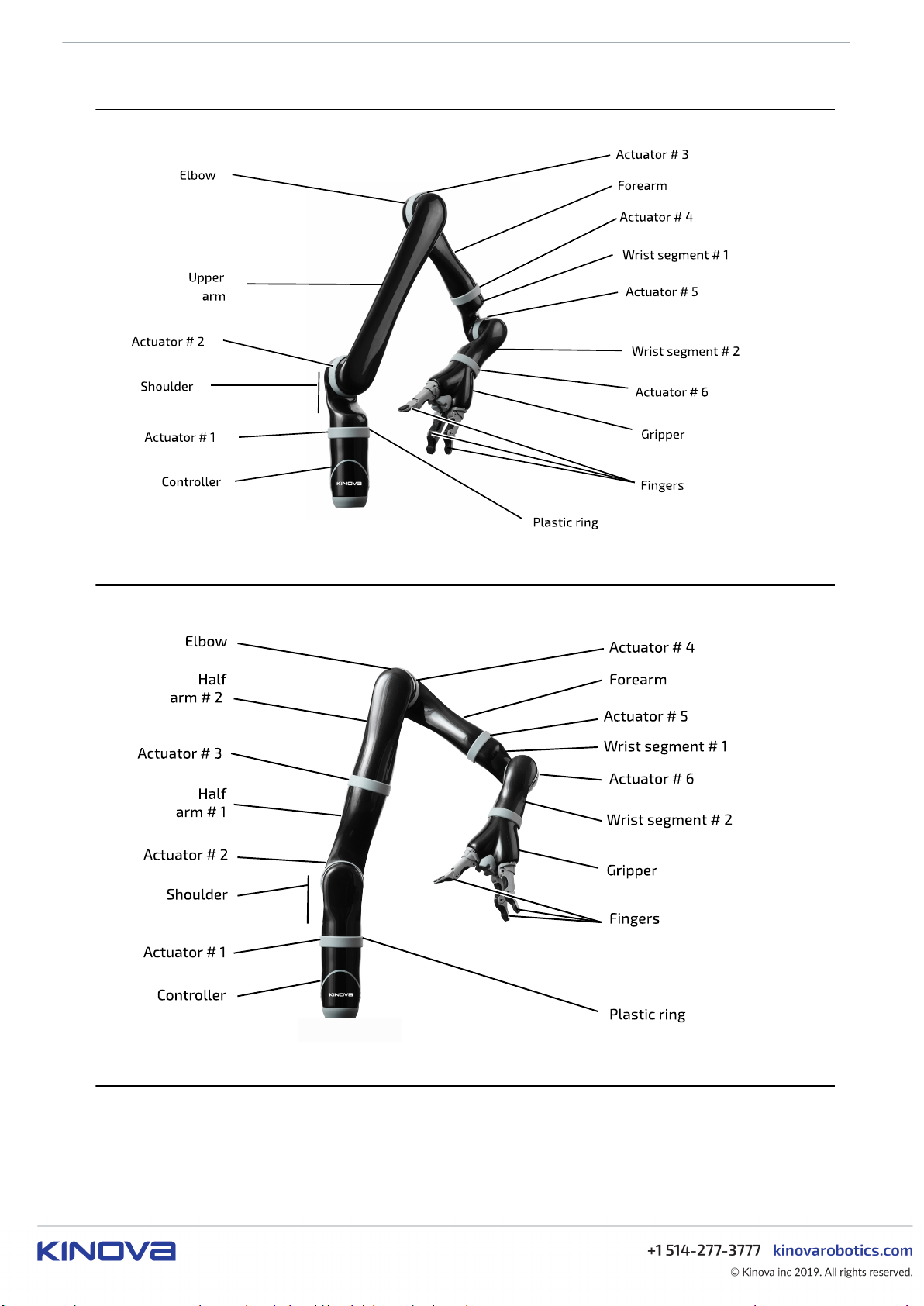
6 DoF Spherical Wrist Components
This section shows the components of the 6 DoF spherical wrist robotic arm.
7 DoF Spherical Wrist Components
This section shows the components of the 7 DoF spherical wrist robotic arm.
Robot external connectors
This section describes the external connectors on the base of the robot.
The following figure shows the external connectors located on the base of the robot.
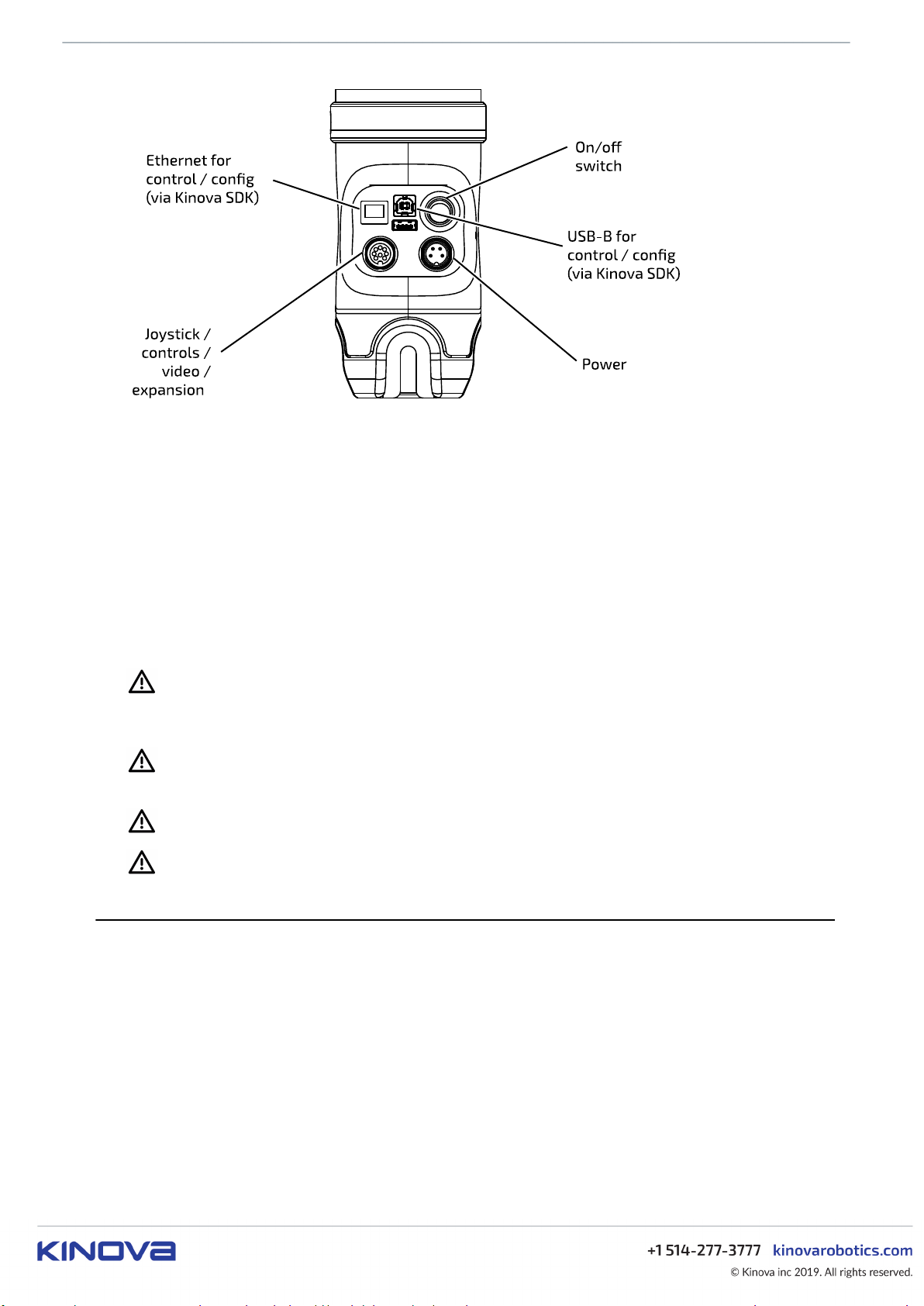
KINOVA® Gen2 Ultra lightweight robot User Guide 11
Figure 3: Robot external connectors
The panel at the back of the controller has several connectors and a power on / off switch.
The power on /off switch is used to power up or power down the robotic arm.
The four-pin power connector is used to connect the robotic arm to electrical power.
The eight-pin joystick / controls / expansion port is used to connect wired controllers for the arm.
Note: Two of the pins on this port are available for expansion purposes for researchers and application
developers to connect alternate controllers or other devices.
The USB port is used to connect a computer for maintenance and configuration purposes.
The Ethernet port is used to operate the robotic arm programmatically using API commands.
The control port and power connector are intended to be connected only with a Kinova-approved
device. Connecting other devices may result in poor performance, make the arm inoperable and void your
warranty.
Do not override the safety purpose of the polarized or grounding-type plug. If the provided cable does
not fit your outlet, consult an electrician for replacement of the obsolete outlet.
To prevent risk of fire or electric shock, avoid overloading wall outlets and extension cords.
Protect the cords from being walked on or pinched.
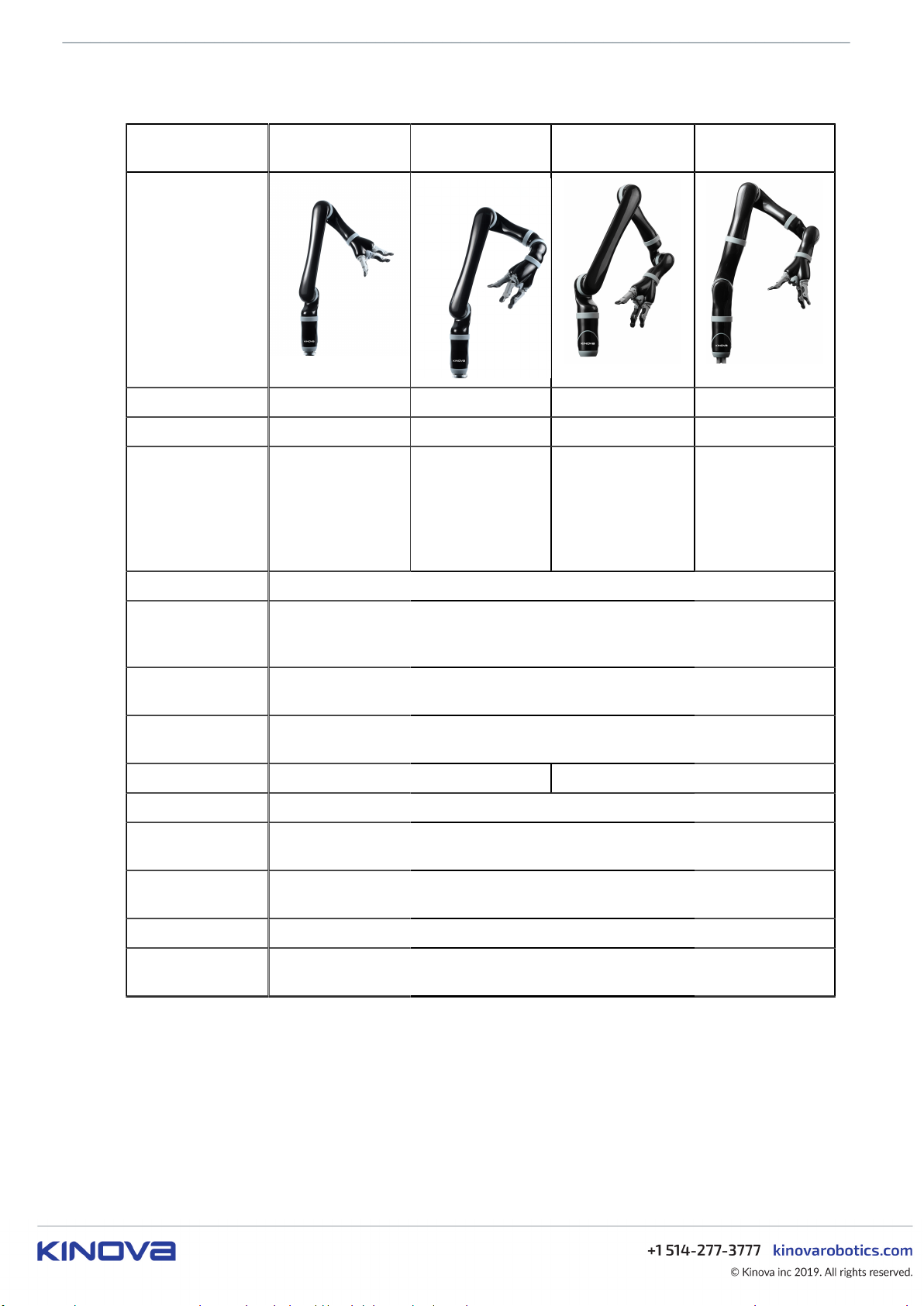
Robot specifications
This section compares the different arm configurations.
Each of the four available robot configurations have their particular strengths. The best option depends on
the needs of the specific users / group. The following table compares the four options.
KINOVA® Gen2 Ultra lightweight robot User Guide 12
Table 1: Configurations
4 DoF 6 DoF curved
wrist
Total weight 3.6 kg 4.4 kg 4.4 kg 5.5 kg
Reach 75 cm 90 cm 98.4 cm 98.4 cm
Maximum payload • 4.4 kg
(mid-range
continuous)
• 3.5 kg (fullreach peak /
temporary)
Materials Carbon fiber (links), Aluminum (actuators)
• 2.6 kg
(mid-range
continuous)
• 2.2 kg (fullreach peak /
temporary)
6 DoF
spherical wrist
• 2.6 kg
(mid-range
continuous)
• 2.2 kg (full-
reach peak /
temporary)
7 DoF
spherical wrist
• 2.4 kg
(mid range
continuous)
• 2.1 kg (full-
reach peak /
temporary)
Joint range
(software
limitation)
Maximum linear
arm speed
Power supply
voltage
Average power 25 W (5 W in standby) 25 W (15W standby)
Peak power 100W
Communication
protocol
Communication
cables
Water resistance IPX2
Operating
temperature
± 27.7 turns
20 cm / s
18 to 29 VDC
RS485
20 pins flat flex cable
-10 °C to 40 °C
KINOVA® Gen2 Ultra lightweight robot User Guide 13
4 DoF 6 DoF curved
Pros: • Position
control
• Simplicity
• More payload
compared to
6 DoF and 7
DoF
wrist
• No pinch
points
• Proven
technology
• “Unique feel”
wrist motion
6 DoF
spherical wrist
• Simpler
kinematics
• Better reach
• More payload
than 7 DoF
7 DoF
spherical wrist
• Ability to
move arm
without
moving hand
• More
flexibility
with
movements
• Less
difficulties
with
singularities
KINOVA® Gen2 Ultra lightweight robot User Guide 14
Installation and setup
This section describes the main high level steps of the installation process.
The robot’s installation consists of four high-level steps:
1. Mechanical integration
2. Electrical integration
3. End-effector electrical integration (optional)
4. Control integration
Mechanical mounting of the robot
This section describes the steps for mechanical mounting of the robotic arm.
About this task
The arm is designed to be installed on a fixed surface or mobile platform. Please make sure
the arm is fixed in such a way that its base cannot fall or break during operations involving
maximum reach of the arm. Here is a guide on how to install the arm on the mounting kit
(XK 0000 0014) supplied with your robot.
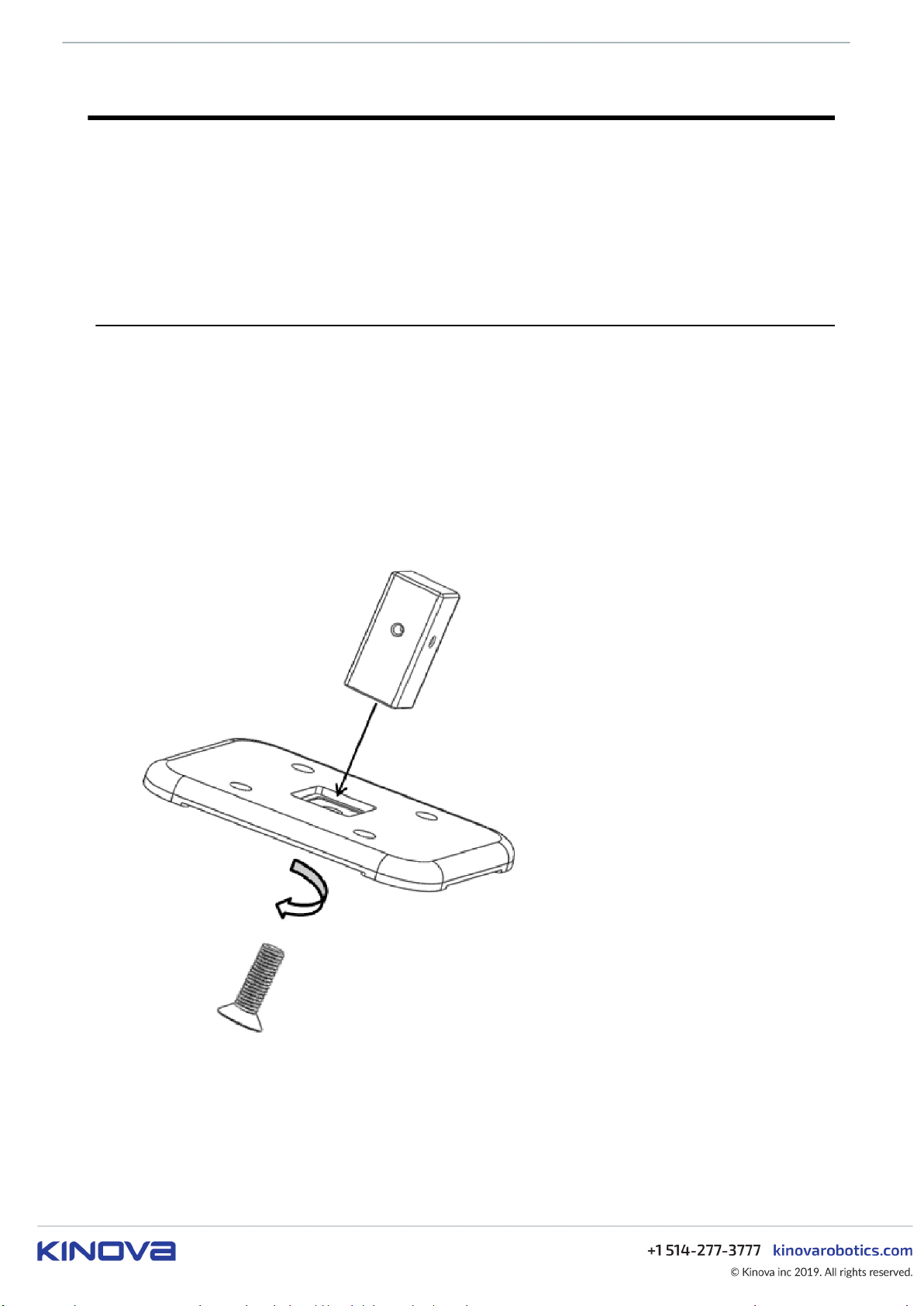
Procedure
1. Assemble the mounting kit. Insert the mounting post into the square cavity on the top of the mounting
plate and use an 8 mm hex key to attach from the bottom of the mounting plate.
2. Affix the mounting kit to a flat surface. You can either place the larger side of the mounting kit on the edge
of a solid flat surface and clamp it as firmly as possible by placing the two clamps supplied with the package
on each side of the mounting post or secure four M12 screws through the holes in the mounting plate.
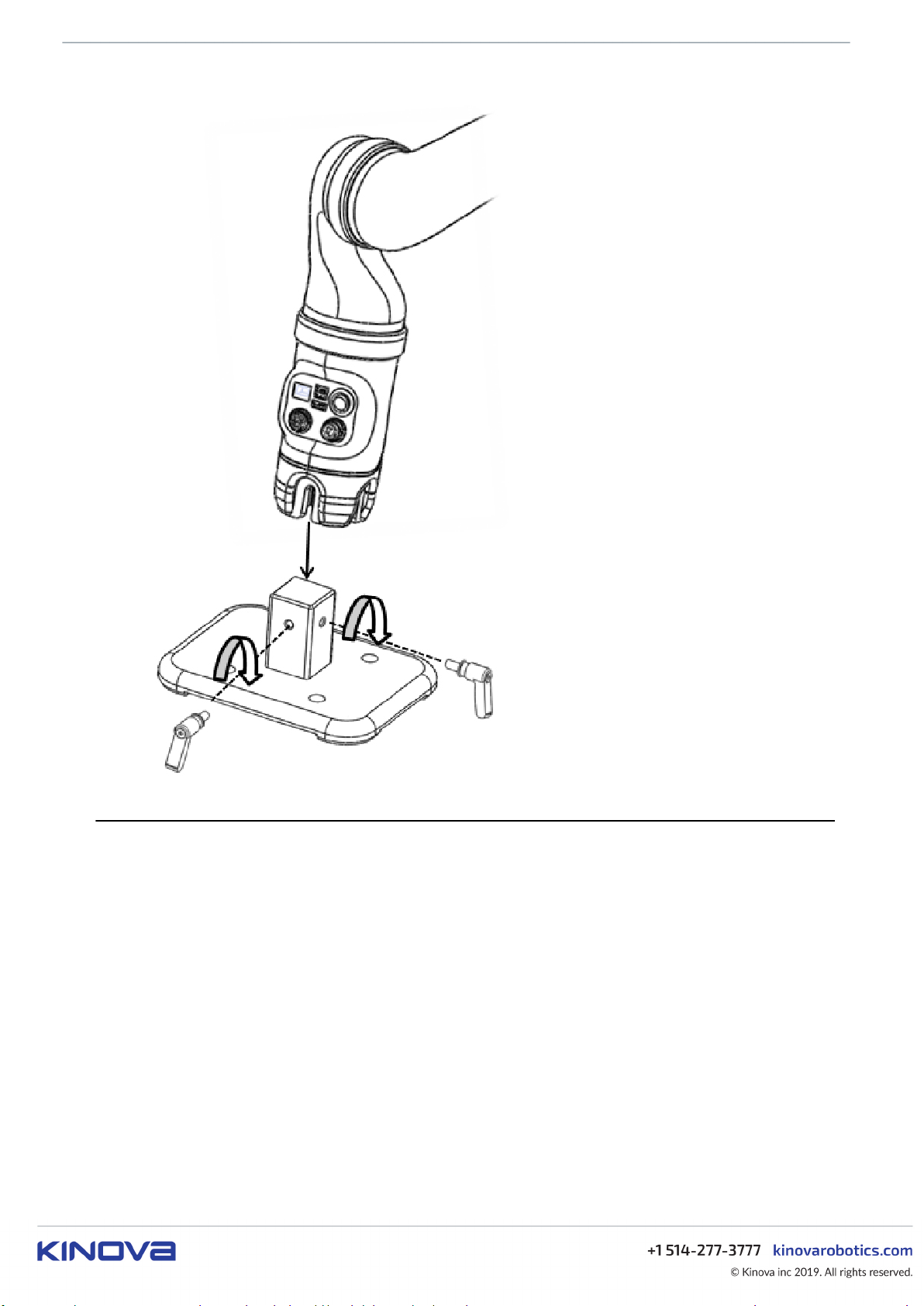
3. Insert the robot arm on the top of the mounting post. Screw the two M8 lever screws into the mounting
post, one in the back of the controller and the other on one of the sides of the robot.
KINOVA® Gen2 Ultra lightweight robot User Guide 15
Electrical integration
This section describes how to connect the robot to an electrical power source.
There are two ways of powering the robot:
• Wall electrical outlet
• Battery power
Electrical outlet - You can power your robot using a standard 110/220 V power outlet by plugging the
power cord (EH 0300 0001 (USA), EH 2500 0001 (EUR), EH 2500 0002 (AUS), EH 2500 0003 (UK)) into
the Power Supply Unit (PSU - AE 0000 0029) on one end and into a power outlet on the other. Then plug
the PSU into the base controller power connector.
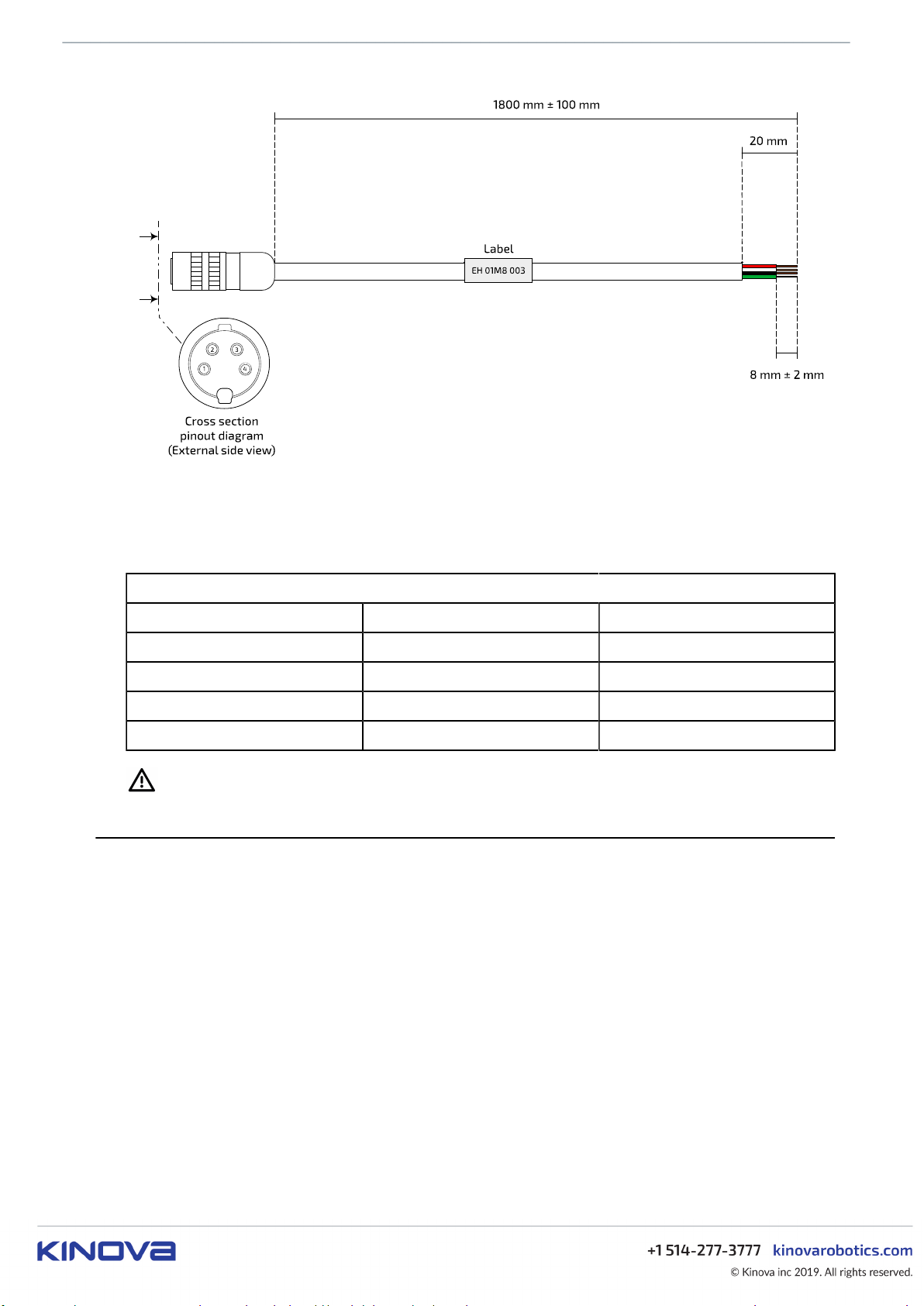
Battery power - You can use the battery power cable (EH 01M8 0003) by plugging one end into the base
controller power connector and connecting the four wires at the other end to a 24V battery. The following
table shows the relationships between power connector pinout, the signal, and the wire color.
KINOVA® Gen2 Ultra lightweight robot User Guide 16
Figure 4: EH 01M8 003 battery power cable
Table 2: Battery power cable pinout
Pinout table
Pin # Signal Wire color
1 24V Red
2 24V White
3 GND Black
4 GND Green or blue
Make sure that your battery respects the electrical specifications of the robot.
Integrating a new tool (optional)
This section describes how to integrate a new end effector with Kinova actuators, whether
in a Kinova robot or custom application.
The small actuators (KA-58), whether they are incorporated at the last joint on a Kinova robot, or used
standalone as part of a custom-built robotics application, have the ability to be connected to different types
of tools. These actuators are designed to connect easily with Kinova's KG-Series grippers, but also have the
ability to integrate with 3rd party end effectors.
Note: To add a new end effector, you will first need to remove the Kinova gripper that comes with the robot.
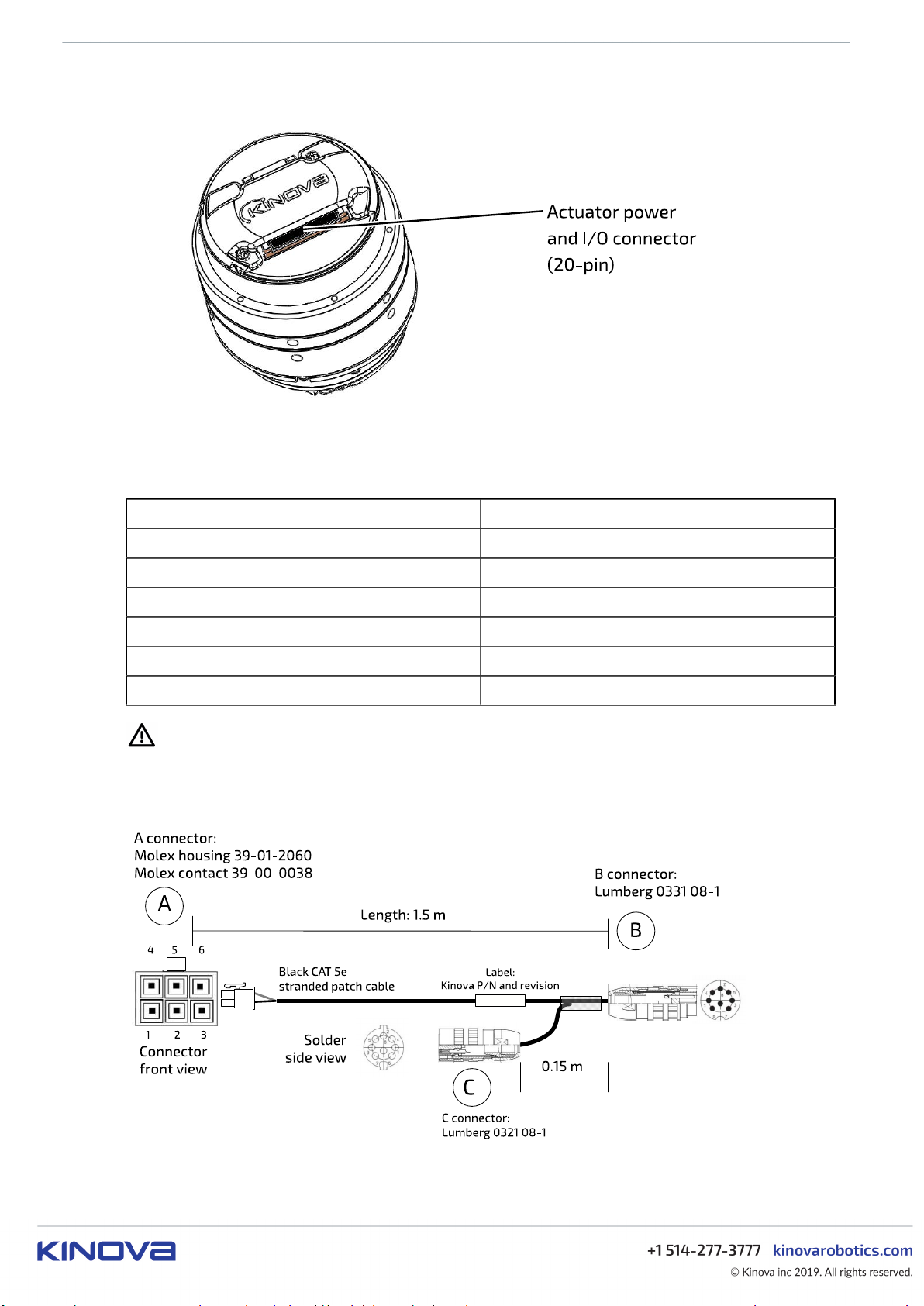
The output end of each actuator has a 20-pin power and I/O connector. Two of these pins are set aside as
dedicated expansion communication and power lines. This allows you the option to connect an additional
device to the end of a robot or the end of a chain of actuators in a custom-built set-up.
KINOVA® Gen2 Ultra lightweight robot User Guide 17
The pins and their function are described in the table below:
Table 3: KA-58 actuator pinout
Pin Signal
1 to 8 24V input
9 to 16 GND
17 RS-485 low
18 RS-485 high
19 Expansion 0
20 Expansion 1
Make sure to connect your end effector using only pins 19 and/or 20. Using other pins could severely
damage your robot. These two expansion lines are accessible for power and controls purposes via pins at the
joystick port. A 'Y' cable is supplied with the robot to allow you to access both the joystick and the expansion
lines.
The output pinout of the two expansion lines is indicated in the table below.

KINOVA® Gen2 Ultra lightweight robot User Guide 18
Table 4: EH 01M5 0001 pinouts
Connector A
Pin Signal Function
1 COM1 RS485_low
2 GND GND
3 COM3 Expansion 0
4 COM2 RS485_high
5 24V (max current: 1.5A) 24V
6 COM4 Expansion 1
Controls integration
This section describes the controls integration for Kinova robotic applications, whether for
Kinova robots or custom-built applications.
Once the mechanical and electrical integration are completed are completed (as well as the end effector
integration if applicable), you can power on the robot by flipping the power switch on the back of the
controller to ON. To control the robot, you can use either the Kinova API or the Kinova joystick.
API - Connect your computer to the robot using either the USB cable supplied with your package or an
Ethernet cable. Connect one end of the cable to the robot and the other end to the development computer.
Install and open the KINOVA® Soware development kit (SDK) on the development computer and follow
the procedure and documentation included in the SDK.
Note: Refer to the Soware development kit user guide and the Kinova API documentation for more
guidance on controlling the robot via the API.
Kinova Joystick - Connect the joystick directly to the joystick port or to the C connector as shown in the
diagram below if you are using the 'Y' cable.
Refer to the Kinova joystick controller section in the user guide for all the details regarding the use of the
joystick.

KINOVA® Gen2 Ultra lightweight robot User Guide 19
Operating / controlling the robot
Three options are available to control Kinova robots. Two of these options use the API. The third option is
the joystick control. The three options are:
• (Kinova) joystick control: This controls the arm in Cartesian velocity (by default as soon as the robot
reaches its READY position) or in Angular velocity (if angular control is activated).
• Kinova software control: Kinova provides two different software control panels that allow you to
control the arm via a graphical user interface.: the Development Center and the Torque Console. These
two software panels allow users to command the arm in position, velocity, and trajectories. It also
allows users to activate admittance control (inside the Development Center) and direct torque control/
force control (inside the Torque Console). For more details on Kinova software, please see the Soware
development kit User Guide (downloadable from the Kinova website).
• API control: Kinova has a library of C++ functions to control its robots. This library of functions is
referred to as the Kinova API. The API (.dll files and .h files) is downloadable from Kinova’s website
as part of the KINOVA® Soware development kit (SDK). The SDK is supplemented by HTML-based
documentation detailing all the available functions. The Kinova API is supported on both Windows
and Ubuntu. Kinova also offers developers the possibility for developers to control the robot through
a ROS interface. For more information, see the Kinova ROS Github page at https://github.com/
Kinovarobotics/kinova-ros.
A fourth option is to control the arm by directly controlling each actuator through applying internal or
external forces / torques. The robot becomes reactive to direct control in admittance control and direct
torque/force control.
Kinova joystick controller
The Kinova standard controller is a three-axis (left/right, forward/back, and twist) joystick mounted on a
support. The controller includes five independent push buttons and four external auxiliary inputs (on the
back side).
Joystick movements and modes
The Kinova joystick allows you to control the robot in a 2-axis or 3-axis mode. 2-axis mode will disable the
joystick twist rotation.
The following table shows the button default factory settings for using the joystick in a 2-axis and 3-axis
modes.
KINOVA® Gen2 Ultra lightweight robot User Guide 20
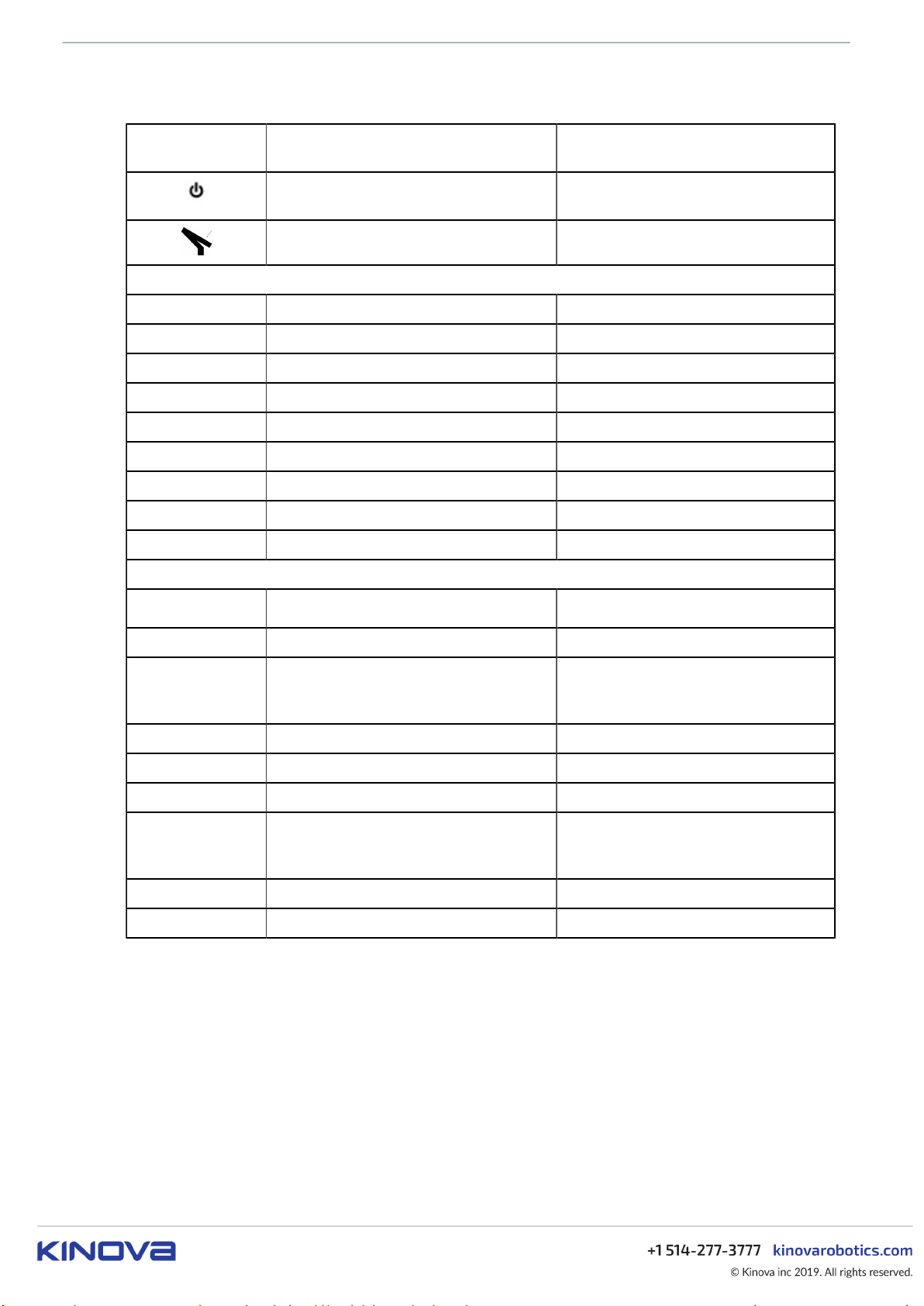
Table 5: Default joystick button settings
Buttons One click Hold 2 sec (Hold until
position is reached)
Deactivate / Activate Joystick Change joystick operating
mode (2-axis Vs 3-axis)
--- Home / Retracted function
3-Axis
1 Deactivate / Activate Drinking mode ---
2 --- Set Position
3 --- Go to pre-set position
A Reach Finger mode Decrease speed
B Reach Translation & Wrist mode Increase speed
Ext1 Reach Finger mode Decrease speed
Ext2 Reach Translation and Wrist mode Increase speed
Ext3 -- Home / Retracted function
Ext4 Deactivate / Activate Drinking mode --
2-Axis
1
2 Reach Wrist orientation & Finger mode Decrease speed
3
A --- ---
B --- ---
Ext1 Reach Wrist orientation & Finger mode Decrease speed
Ext2
Ext3 -- Home / Retracted function
Ext4 Deactivate / Activate Drinking mode --
Deactivate / Activate Drinking mode
Reach Translation-X/Y &
Translation-Z / Wrist rotation mode
Reach Translation-X/Y &
Translation-Z / Wrist rotation mode
---
Increase speed
Increase speed
Operating principles and Cartesian mode
This section describes at a high level the control of the robot using the joystick in Cartesian
mode.
Operating principles
The operating principles are very simple and intuitive. The robot may be operated through several
controllers. The following sections present the general control principles through Kinova’s joystick.
Basic movements
The normal control of the robot with the joystick is said to be Cartesian. The user commands the tool
translations (position variations) with respect to the base and the rotations (orientation variations) around
the tool reference frame. The different joints are piloted automatically following the given command.
KINOVA® Gen2 Ultra lightweight robot User Guide 21
In Translation mode, the user controls the position of the gripper / tool in space. The gripper will always
keep the same orientation with respect to the robot base.
• Translation X refers to left/right movements of the gripper
• Translation Y refers to front/back movements of the gripper
• Translation Z refers to up/down movements of the gripper
In Wrist mode, the user controls the position of the gripper around its center point (reference point) which
will not move (or move slightly) when operating in this mode. Lateral orientation refers to a thumb/index
circular movement of the wrist around the reference point. Vertical orientation refers to a top/bottom
circular movement of the wrist around the reference point. Wrist rotation refers to a circular movement
of the gripper around itself.
Drinking mode is to be used with the wrist rotation only. While operating the robot in drinking mode, the
reference point (normally set in the middle of the gripper), is offset in height and length to produce a rotation
around another point in the space of the robot.
Note: The offset is meant to shift the rotation center for wrist rotation from the center of the gripper to a
point corresponding to the rim of a typical sized drinking glass held by the gripper. This way, the wrist will
rotate, but around a point on the rim of a virtual glass, aided by movement of the elbow of the robot arm.
This is similar to the way we coordinate an adjusted rotation of our wrist with movement of our forearm
and elbow while drinking with a glass so that the glass tips its rim toward the mouth to pour. This mode is
primarily intended for Assistive market users who use the robot to compensate for upper limb movement
limitations. However, the mode is available to research users as well and can be useful in applications where
the robot needs to pick up and pour from a small container of liquid.
In Finger mode, the user controls the opening and closing of the fingers.
Note: The robot will sometimes respond differently to a given command than described in this section.
This may be due to the singularity and collision avoidance algorithms embedded in the kinematics. It is a
normal protective behaviour of the robot and is position dependent. Both these avoidance algorithms can
be deactivated by the user.
Home / Retract positions
This section describes the Home and Retracted positions of the robotic robot.
The robot comes with two configurable factory default pre-set positions:
• Home position and
• Retract position.
Home and retract positions can be configured using the KINOVA® Development Center utility.
The Home position refers to the position of the robot when it is ready to be used. In the Home position, the
robot is awaiting commands from a control device.
The Retract position refers to the position of the robot when it is not used. The user should always place
the robot in the Retract position when it is unused as it decreases the physical volume occupied by the
robot. In the Retract position, the robot is in standby mode; control device features are disabled and power
consumption is much lower.
Never use the Home / Retract function when carrying liquid. The Home position is pre-set and if the
wrist rotates, it may spill some liquid.
Operating the robot via joystick
This section describes operation of the robot using the joystick.
This section explains how to operate the robot with factory configuration. Contact your reseller for
operation instructions in the case of an adapted configuration.
Before operating the robot, please make sure it is properly installed.
Do not manipulate cutting, very sharp or any dangerous tools or objects with the robot.
This equipment is not designed to act as a lift.
 Loading...
Loading...