

Page 1

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
ECOVARIO 系列驱动器使用手册
深圳市步进科技有限公司 2005.08.06
1/1
Page 2

Kinco® ECOVARIO
发布版本说明
版本 说明
2005.6 中文第一版
深圳市步进科技有限公司 版权所有
未经特别授权,禁止对本文档进行传播和复制。
免责申明
已经对文档的内容与所描述的软件和硬件进行了一致性检查。由于不能完全消除不准确性,
因此不能保证完全准确。将对文件的信息进行定期检查,并且在以后的修订中进行必要的修
改。非常乐意接受修改建议。
®
系列伺服驱动器使用手册
2/2
Page 3

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
目录
1. 手册说明.................................................................. 5
2. 安全指南.................................................................. 5
2.1 符号.................................................................... 5
2.2 一般注意事项............................................................ 5
2.3 高电压警告.............................................................. 6
2.4 高温警告................................................................ 6
2.5 意外机械运动的危险 ...................................................... 6
2.6 使用说明................................................................ 6
3. 合法申明.................................................................. 7
3.1 交货申明................................................................ 7
3.2 可靠性申明.............................................................. 7
3.3 标准.................................................................... 7
3.3.1 CE 认证 ............................................................. 7
3.3.2 符合 UL 508C 的 UL/CSA 认证 .......................................... 7
4. 技术数据.................................................................. 7
4.1 额定数据................................................................ 7
4.2 一般技术数据............................................................ 9
4.3 订货号................................................................. 11
4.4 型号标签............................................................... 12
4.5 匹配的电机类型......................................................... 12
4.5.1 ECOVARIO® 电机..................................................... 12
4.5.2 ECOSTEP® 电机...................................................... 12
4.5.3 直线电机........................................................... 13
4.5.4 三相伺服电机....................................................... 13
4.5.5 直流伺服电机....................................................... 13
5. 安装..................................................................... 13
5.1 装备................................................................... 13
5.1.1 注意事项........................................................... 13
5.1.2 尺寸............................................................... 13
5.1.3 装配............................................................... 14
5.2 电气安装............................................................... 16
5.2.1 注意事项........................................................... 16
5.2.2 EMC 安装........................................................... 16
5.2.4 电源类型........................................................... 17
5.2.5 对有残留电流处理................................................... 19
6.接口..................................................................... 20
6.1 接口定义............................................................... 20
6.2 控制信号............................................................... 20
6.2.2 X2: 数字输入口.................................................... 21
6.2.3 X3: 模拟量输入和输出............................................... 22
6.3 电源接口............................................................... 24
6.3.1 X4: DC Link 电压和制动电阻......................................... 24
6.3.2 X5: 电机........................................................... 25
3/3
Page 4

Kinco® ECOVARIO
6.3.3 电压连接........................................................... 26
6.4 X7:抱闸............................................................... 27
6.5 安全功能............................................................... 28
6.5.1 X8:重启锁.......................................................... 28
6.6 编码器................................................................. 31
6.6.1 X11: 编码器 A 接口.................................................. 31
6.6.2 X12: 编码器 B ...................................................... 32
6.7 串行接口............................................................... 35
6.7.1 X13: 带 2 个快速捕捉输入口的 RS485/RS232 接口........................ 35
6.7.2 X14 USB 接口参数定义 ............................................... 38
6.8 CAN 接口 X2 ........................................................... 139
6.9 可选其它接口........................................................... 40
6.9.1 X22: 带编码器仿真的接口设计........................................ 40
6.9.2 设计为 PROFIBUS DP-V0 的 X22 接口.................................... 41
7. 试运转................................................................... 43
7.1 试运转前注意事项....................................................... 43
7.2 控制和显示单元......................................................... 43
7.3 试运行前的操作顺序..................................................... 43
7.3.1 状态显示........................................................... 44
7.3.2 错误信息........................................................... 45
7.3.3 按键操作 ........................................................... 46
8. 参数设置................................................................. 48
8.1 ECO2WIN 用户接口 ....................................................... 48
8.1.1 硬件和操作系统要求................................................. 48
8.1.2 ECO2WIN 用户接口功能 ............................................... 48
9 附件...................................................................... 49
9.1 附属部分 ............................................................... 50
9.1.1 散热片............................................................. 50
9.1.2 屏蔽套件 ........................................................... 50
9.2 定制参数用附件 ......................................................... 52
9.2.1 VARIOSWITCH........................................................ 52
9.2.2 ECOVARIO 启动工具包(USB 版本)..................................... 53
9.2.3 ECOVARIO®启动工具包(CAN 版本) .................................... 53
9.3 制动电阻 ............................................................... 53
9.3.1 制动电阻 100W (有冷却时 250W) ....................................... 53
9.3.2 制动电阻 200W (有冷却时 500W) ....................................... 55
9.4 ECVARIO 匹配的连接件 ................................................... 57
9.5 电缆................................................................... 57
10 附录..................................................................... 59
10.1 术语表 ................................................................ 59
10.2 图表索引.............................................................. 59
10.3 公式索引.............................................................. 60
10.4 引用标准和指导规范索引................................................ 60
®
系列伺服驱动器使用手册
4/4
Page 5
Kinco® ECOVARIO
1. 手册说明
这个手册描述的是 ECOVARIO®伺服驱动器,供使用 ECOVARIO®伺服驱动器的技术人员
使用。
相关手册:
编程: ECOVARIO®选型手册,软件工具 ECO2WIN 编程手册
应用说明: ECOVARIO®使用手册
电机数据: “KINCO® 伺服电机系列选型手册”
本文档对相关人员有如下要求:
运输:必须了解携带和运输静电敏感设备方法
安装:经过电工技术培训,了解自动化设备安全操作知识
系统设定/试运行:经过培训的人员,在自动化领域具有广泛的经验
2. 安全指南
2.1 符号
®
系列伺服驱动器使用手册
符号 警告内容 说明
2.2 一般注意事项
只有合格的技术人员才可以进行诸如安装、设定和维护的操作。合格人员
指的是那些熟悉产品的运输、安装、设定和操作,并且经过专门的培训的
人员。
除了本公司,如果需要对工厂原装部件进行修改或改装,请联络本公司,
以确认那些部件适合安装在我们的设备上。
无论运行在哪个操作模式,特别是在设定和维护的时候,一定要确保紧急
停止开关可以正常工作。
一般危险警告 忽视该警告会导致死亡或者严重伤害
高电压警告 忽视该警告会导致死亡或者严重伤害
高温警告 忽视该警告会导致严重的烫伤
5/5
Page 6
Kinco® ECOVARIO
2.3 高电压警告
不要在操作的时候打开驱动器外壳。在操作的时候,必须将盖板和电缆固
定和锁好。
通电之前,确保所有的接地装置都连接正常。
断电之后,必须等待六分钟以上,方可接触连接插头。电源关闭后,内部
的电容在一定时间内仍然保持着可以伤害到人的电压。 Dc link 部分的电
压降到 40V 以下后方可保证安全。
2.4 高温警告
过高的表面温度可能会烫伤皮肤,ECOVARIO®伺服作为发热源,其表面
温度可以达到70℃以上。
®
系列伺服驱动器使用手册
2.5 意外机械运动的危险
意外运动的电机、工具、轴等会导致严重伤害和死亡。ECOVARIO®驱动
器可以产生很大的机械功率和加速度。避免站在机械的危险区域。永远不
要关闭安全保护装置。故障品必须由经过授权的人员维修。
2.6 使用说明
伺服驱动系统作为电子和机械的整体的结合体,只能够作为一个整体使用。所有关于技
术数据都是基于这一点给出的。
除了特别的许可,本伺服系统禁止在危险地方和有油、可燃气体、潮气等恶劣的环境。
机器的制造商必须充分考虑到设备存在环境潜在危险,并加以防范处理,避免伤害事故
的发生。
ECOVARIO®驱动器三相供电电源不可以超过 400V。请注意不同的驱动器
允许供给的最大电压是不同的。
如果伺服驱动器使用在设备和工厂环境,用户应该保证其设备和工厂环境
符合 EC 机械标准 98/37/Ec 和 EMC 标准 89/336/EEC. 如果可能话,也必
须遵守 EN60204 和 EN ISO12100 第 1 和 2 部分要求。
可选“重启锁”
“重启锁”必须安装在符合EN60204、EN ISO 12100-1和-2、EN954-1安全标准的安全电路
中。
仅在电机不在旋转时激活,带有非固定负载的驱动器必须有另外的机械安全制动装置。
6/6
Page 7
Kinco® ECOVARIO
®
系列伺服驱动器使用手册
如果驱动器由于下面原因处于非激活状态时“重启锁”不能再使用。
正在清理、维护和修理
长期处于不工作状态
在上面情况下整个系统应人为断开电源和主回路开关。
在急停状态
在急停时,主回路接触器是断开的。
3. 合法申明
3.1 交货申明
我们的交货申明是基于《电子产品和服务的一般交货申明》
3.2 可靠性申明
本手册里边的电路和操作过程均为推荐的方式。每个使用者必须针对特定使用环境进行
适用性验证,深圳市步进科技有限公司不对适用性做保证,尤其是司不对如下原因造成的损
坏负责:
· 忽视本手册和其它与ECOVARIO®相关的手册的操作说明
· 未经许可,擅自对驱动器、电机和其附件进行修改
· 操作或计算错误
· 不正确的使用ECOVARIO®驱动器及其附件
3.3 标准
ECOVARIO
®
使用在工业用途的设备和工厂环境。
本驱动器满足下面标准:
DIN EN61800-5-1, DIIN EN 61800-3
3.3.1 CE 认证
®
ECOVARIO
伺服驱动器已通过CE认证。
3.3.2 符合 UL 508C 的 UL/CSA 认证
如果用户要在需要 UL 和 cUL 认证的国家使用 ECCOVARIO
要指定符合 UL/cSA 标准的驱动器型号。
4. 技术数据
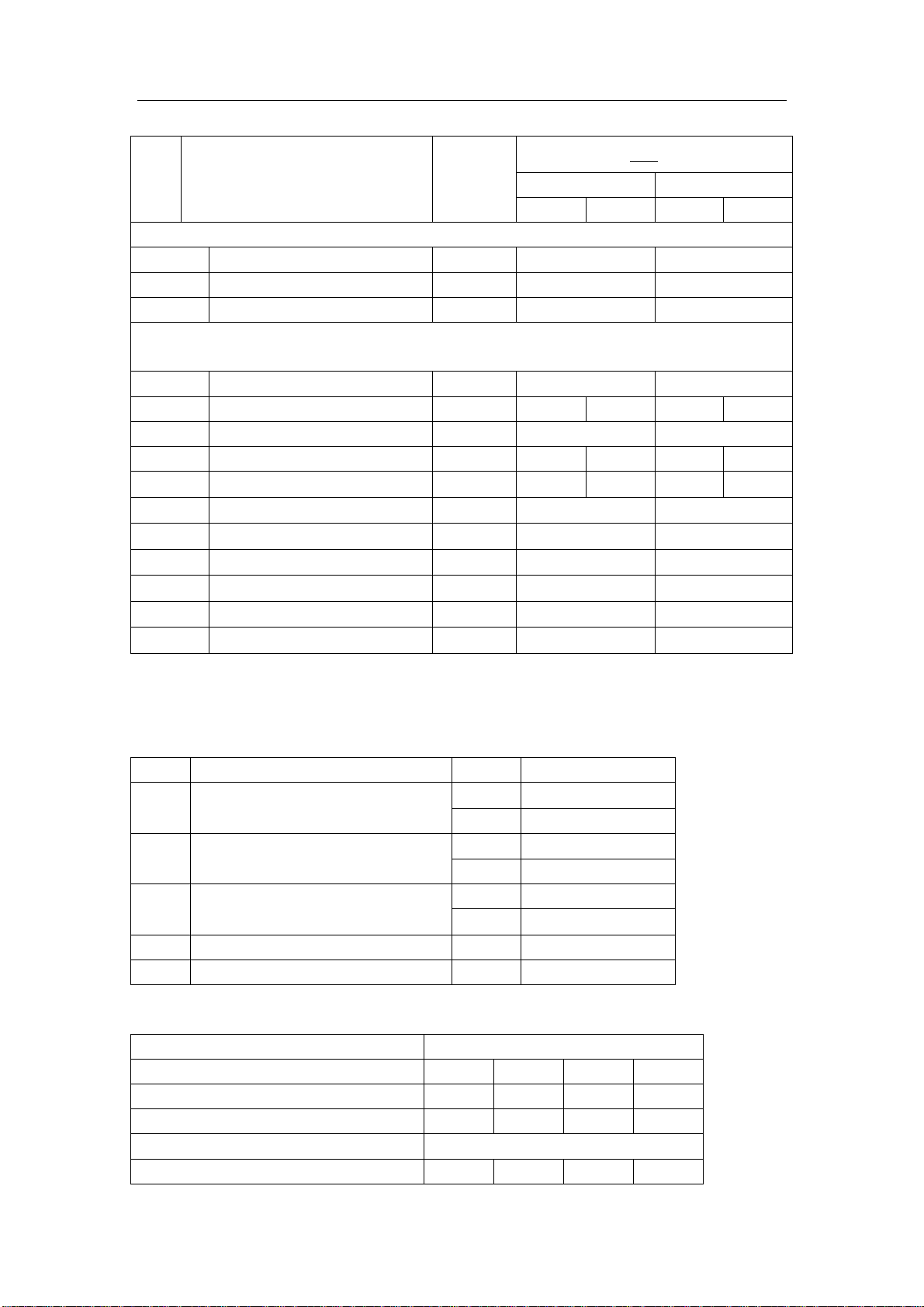
4.1 额定数据
表4.1 电源额定数据:交流电源
额定数据
符号
单相AC电源
MAC2:两相交流伺服马达
MAC3:三相交流伺服马达
单位
MAC2 MAC3 MAC2 MAC3
®
伺服驱动器,用户在订货时需
ECOVARIO® xxxx
214A 414A
x-xx-xxx xxx
7/7
Page 8
Kinco® ECOVARIO
=
=
NETZ 额定电压(X6) VAC 105 230
U
UMAX 最大电压(X6) VAC 105+10% 230+10%
FN 额定频率 HZ 50-60 50-60
SN 额定负载 (1) kVA 1.0 2.2
PVN 功率损耗 (2) W 62 70
®
系列伺服驱动器使用手册
功率损耗说明:
PVO 基本损耗 W 20 20
PV/IO 每安培功率损耗 W/A 7.9 5.9 13.7 10.3
PVD/IO 每100W输出功率损耗 W/100W 2.3 1.0
UO 额定输出电压 (3) VAC 85 190
ION 额定输出电流 (4) ARMS 2.7 3.5 2.7 3.5
PO 额定输出功率 (3) W 460 515 1025 1150
三相AC电源
UNETZ 额定电压(X6) VAC 105 230
FN 额定频率 HZ 50-60 50-60
SN 额定负载 (1) kVA 1.4 3.5
PVN 功率损耗 (2) W 89 106
功率损耗说明:
PVO 基本损耗 W 20 20
PVI/IO 每安培功率损耗 W/A 7.9 5.9 13.7 10.3
PVD/IO 每100W输出功率损耗 W/100W 1.37 0.46
UO 额定输出电压 (3) VAC 95 205
ION 额定输出电流 (4) ARMS 5.3 7.1 5.3 7.1
PO 额定输出功率 (3) W 1010 1150 2173 2480
单相AC或三相AC电源
IOP 峰值电流 (5) ARMS 14 14 14 14
UBUSN 额定电压 (直流) VDC 150 325
UBUSP 最大电压(直流) VDC 180 380
UP 过压触发 VDC 200 400
CL 直流电容 uF 2000 660
EN-P 能量再生 WS 10 13
0
0
PPPP ++
VDVIVV
PPPP ++
VDVIVV
8/8
Page 9
Kinco® ECOVARIO
=
表4.2 电源额定数据:直流
®
系列伺服驱动器使用手册
额定数据
符号
直流电源
UNDC 额定输入电压(X4) VDC 150 325
PN 额定负载 W 1500 3250
PVN 功率损耗 (2) W 62 70
功率损耗说明:
PVO 基本损耗 W 20 20
PVI/IO
UO 额定输出电压 (3) VAC 100 225
ION 额定输出电流 (4) ARMS 5.3 7.1 5.3 7.1
PO 额定输出功率 (3) W 1060 1212 2385 2720
IOP 峰值电流 (5) ARMS 14 14
UBUSN 额定电压 (直流) VDC 150 325
UBUSP 最大电压(直流) VDC 180 380
UP 最大过压 VDC 200 400
CL 直流电容 uF 1000 330
EN-P 能量再生 WS 5 6.5
MAC2:两相交流伺服马达
MAC3:三相交流伺服马达
PPP +
VIVV
0
每安培功率损耗
单位
W/A 7.9 5.9 13.7 10.3
ECOVARIO® xxxx x-xx-xxx xxx
214B 414B
MAC2 MAC3 MAC2 MAC3
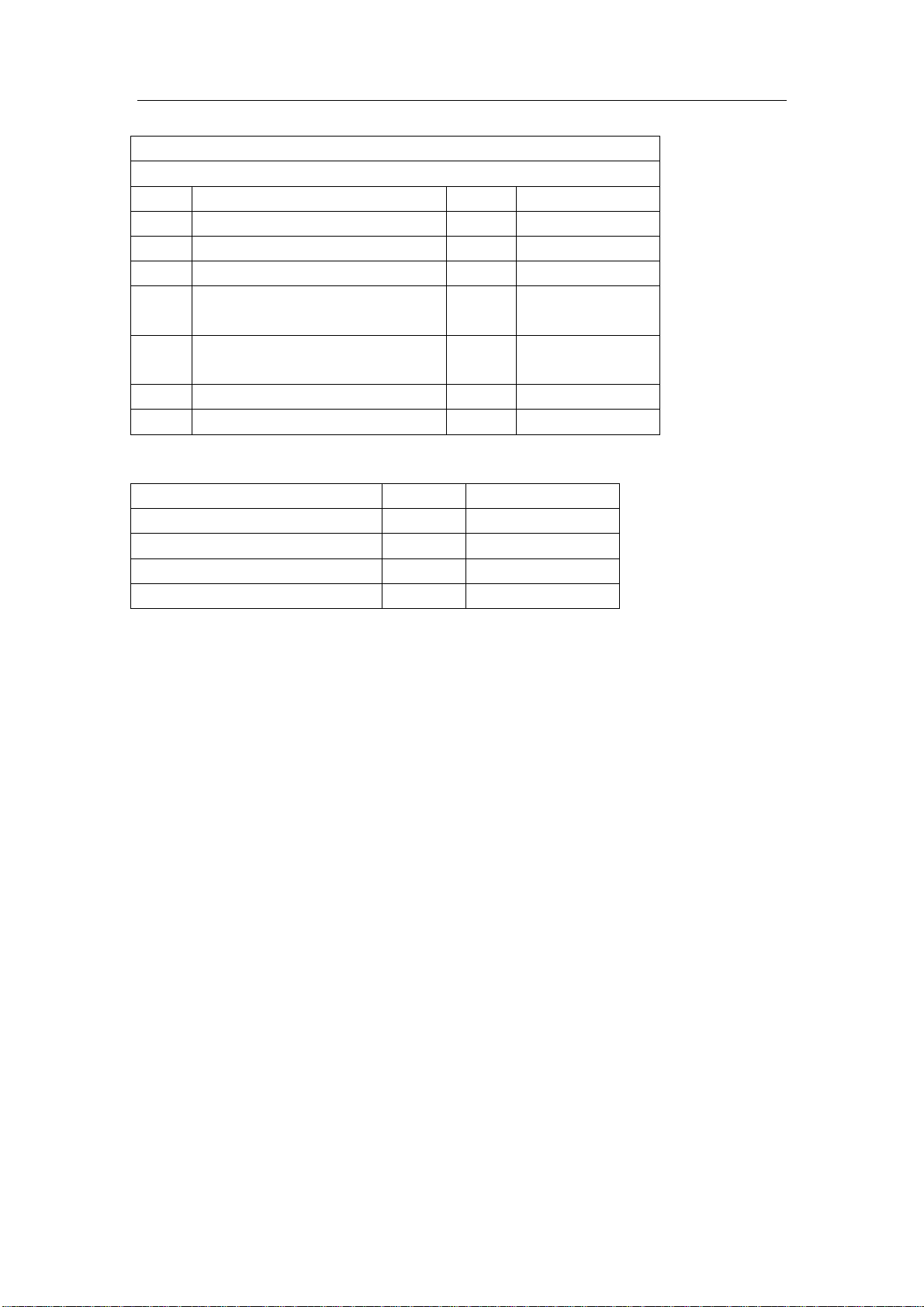
4.2 一般技术数据
表4.3 一般技术数据:控制信号
编号 控制信号 单位
V 24±10% 1 DC24V电源
A 0.8
V 低 0-7,高 12-36 6 数字信号输入
mA 10 (在24V时)
V 24 3 数字信号输出
A 0.5
2 模拟信号输入 -10V-+10V, 10bit
2 模拟信号输出 10bit
表4.4 一般技术数据:外部保护
ECOVARIO® xxx xx xxxxxx
214A 214B 414A 414B
交流输入
直流输入
DC24V输入
外部制动电阻
10AT 10AT
4) 4)
Max 12AF
6AF 4) 6AF 4)
9/9
Page 10
Kinco® ECOVARIO
表4.5 一般技术数据:使用环境
使用环境
ECOVARIO®设计使用环境为三级(EN50178)
符号 环境 单位
TA 环境温度(一般负载) ℃ 5-40
湿度(无凝结) %R.H. 5-85
p 气压 mbar 860-1060
冷却 在封闭环境中需冷却
装置
h 安装海拔高度 m 1000m以内无功率限
制
安装位置 垂直安装
保护等级 IP20
®
系列伺服驱动器使用手册
表4.6 一般技术数据:尺寸和总量
尺寸和重量 单位
尺寸 宽x高x厚 mm 62x279x167
净重 kg 2.1
重量(含DPZ10) kg 2.25
重量(含DPZ10+DPX10) kg 3.6
注解:
(1) 此数据仅为伺服驱动器的内部数据,因为电源波动而产生的改变并未考虑在内,这
意味着输出会随着输入的波动而波动。
(2) 连续工作在大电流时,需要加额外的散热器。如果驱动器温度超过90℃或者环境温
度超过上限,驱动器会自动关闭。
(3) 直流输出的功率决定交流功率的输入。使用环境不同,连续负载能力可能会降低。
(4) 直流接入端(X4)没有峰值电流限制,与之连接的电源内部需要有电流限制和能耗吸
收的功能。
10/10
Page 11
Kinco® ECOVARIO
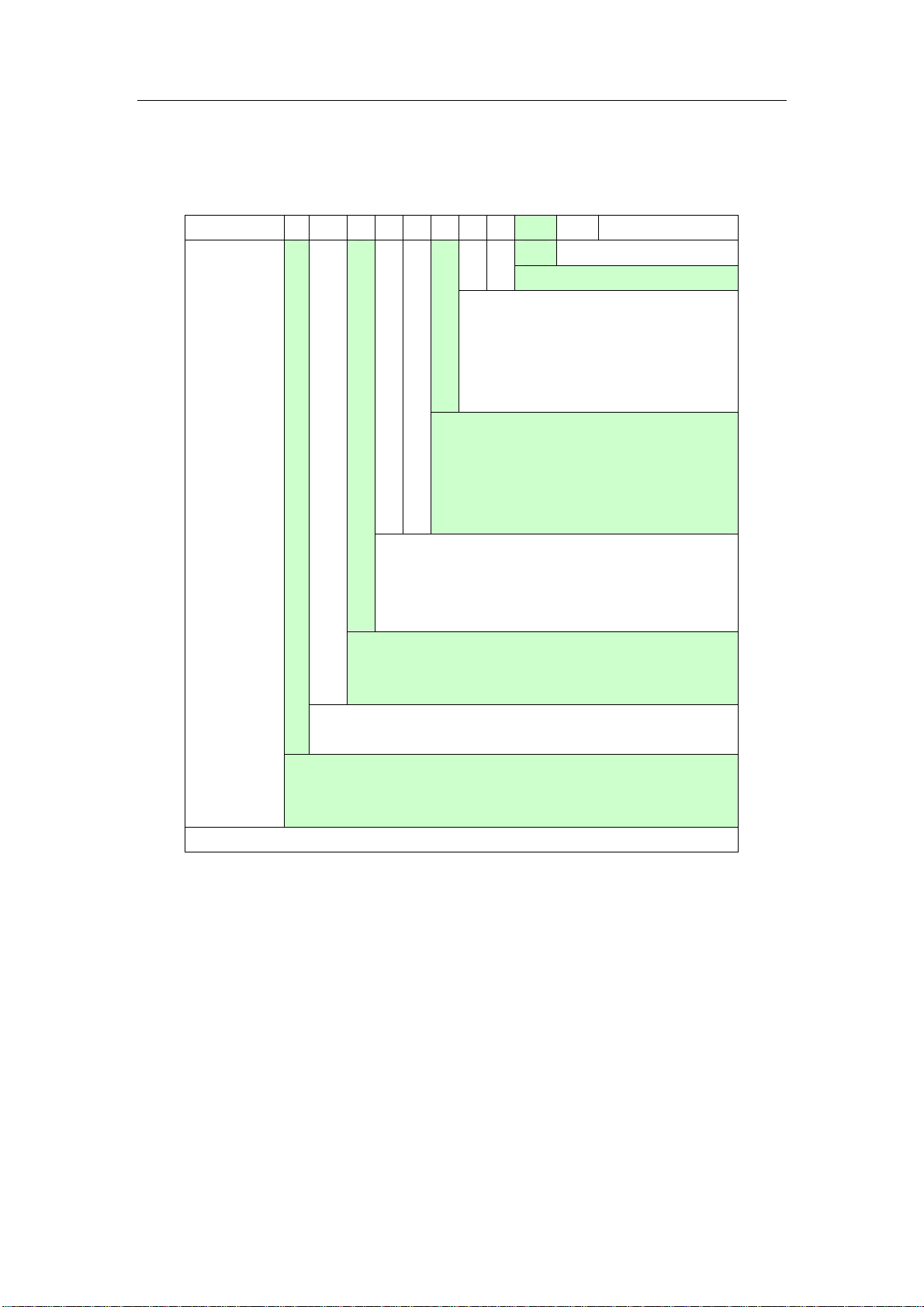
4.3 订货号
表4.7 订货型号说明
ECOVARIO® x xx x x-xx-
驱动器名称
可选项
R:启动锁(24V低电平有效)
S:启动锁(24V高电平有效)
N:无
电源类型
A:单相或三相交流,直流
B:直流
额定电流
14:最大14A
额定电压(直流母线)
2:最大200V
4:最大400V
认证
A:CE,标准设计
B-I:CE,特殊设计
J:CE,UL 标准设计
K-Z:CE,UL,特殊设计
总线类型
A:CAN+RS485+encoder emulation
F:CAN+RS485+PROFIBUS DP
B:CAN+RS232+encoder emulation
G:CAN+RS232+PROFIBUS DP
xxx xxx
参数设定编号
驱动器固件编号
®
系列伺服驱动器使用手册
型号举例:ECOVARIO® 414 AS-AA-000-000
说明:
1) 最大直流输入电压 400V
2) 最大输出电流 14A
3) 交流输入
4) 启动锁,高电平有效
5) CAN BUS+RS485+encoder emulation
6) CE认证 ,标准设计
11/11
Page 12
Kinco® ECOVARIO
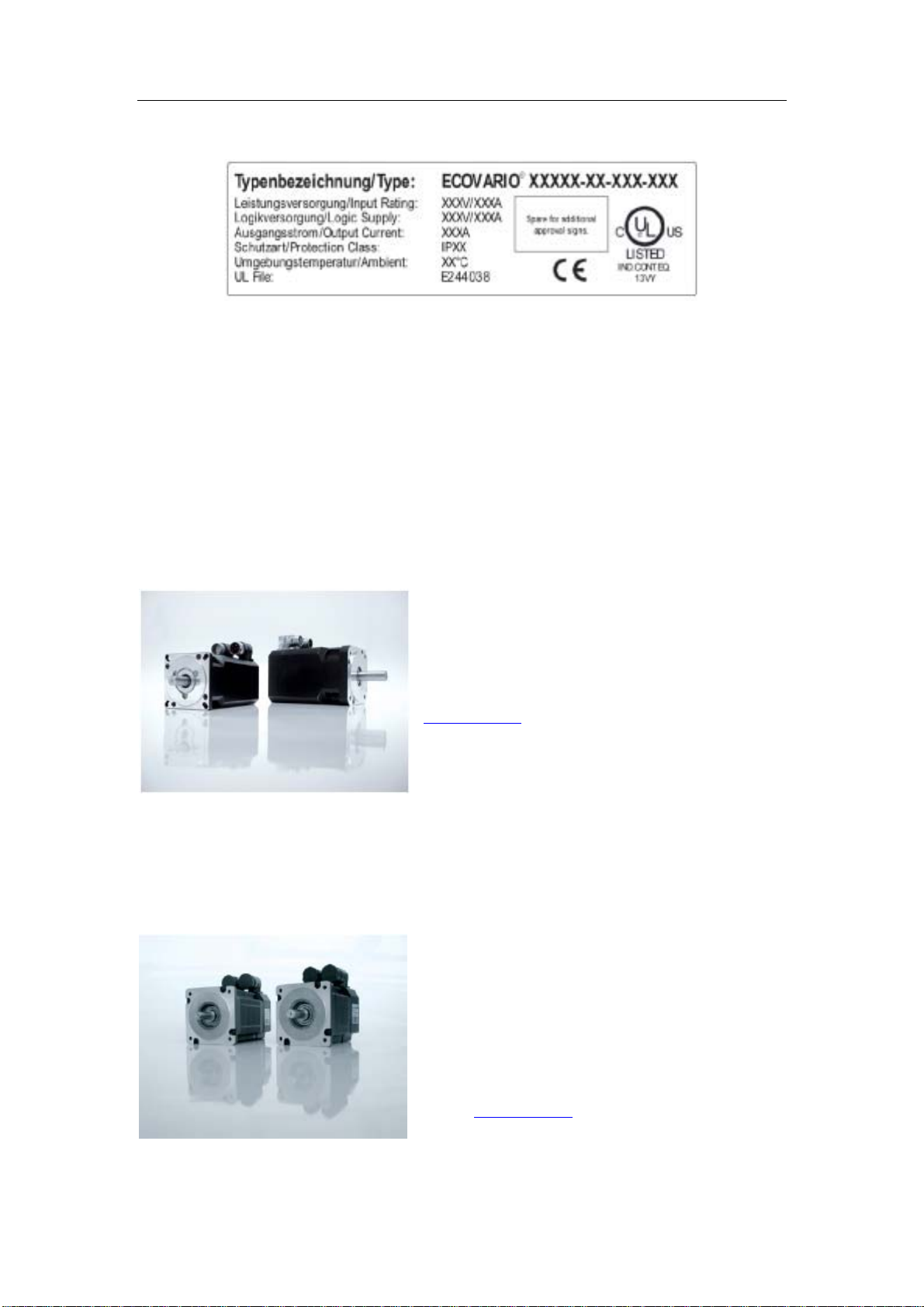
4.4 型号标签
®
系列伺服驱动器使用手册
4.5 匹配的电机类型
ECOVARIO®驱动器可以支持多种类型的电机。除了三相直流电机,驱动器还可以驱动旋
转或直线两相电机,如ECOSTEP®、ECOLIN®、ECOVARIO®。电机必须安装编码器,作为驱动器
控制位置和速度的依据。支持的编码器有增量编码器、正交编码器和绝对编码器。
如果想在 ECOVARIO®中使用直流电机驱动,请联系我们的技术支持。
4.5.1 ECOVARIO® 电机
图 4.2: 80B 和 110B 系列电机
4.5.2 ECOSTEP® 电机
图 4.3 23S 和 34S 系列电机
图中所示为2相低极对数同步电机80B和110B系列,
保持扭矩为0.5-11Nm(保持扭矩为0.5-11Nm范围的
80B和110B系列2相低极对数电机)
更多的关于电机的技术数据和附件信息,请参看产
品目录“ECOVARIO® 驱动器”或者访问我们的网站
www.kinco.cn
左图中所示为 2 相多极对数同步电机 23S、34S 和 42S
系列,保持扭矩为 0.2-15Nm。
The operation of these motors with ECOVARIO®
214xx-xx-xxx xxx with transformator is
restricted by their dielectrical strength.
更多的关于电机的技术数据和附件信息,请参看产
品目录“ECOSTEP®/ECOLIN® 驱动器”或者访问我们
的网站 www.kinco.cn
。
。
12/12
Page 13

Kinco® ECOVARIO
4.5.3 直线电机
左图所示为 2 相同步直线电机 SLM-025,SLM-040
和 SLM-080 系列。推力范围是 220-1650N。
更多的关于电机的技术数据和附件信息,请参看产
品目录“ESOSTEP-/ECOLIN® 驱动器”或访问我们的
网站 www.kinco.cn
图 4.4 直线电机 SLM-080 系列
4.5.4 三相伺服电机
三相永磁同步电机并非 ECOVARIO®驱动器标配电机,但是,使用 ECVOARIO 驱动器运转这样
的电机也是可能的。已经在设备中使用了 3 相伺服电机地工厂无需修改整个系统,也可以使
用我们的 ECOVARIO®驱动器来驱动他们的 3 相伺服电机。
®
系列伺服驱动器使用手册
。
4.5.5 直流伺服电机
直流电机虽然不属于我们供货范围,但是也可以通过 ECOVARIO®驱动器进行驱动。如果在这
方面有需求,强烈推荐您联系我们的技术服务人员。也许在将来,一台带有独立两路输出的
ECOVARIO®可以操作两台永磁直流电机。
5. 安装
5.1 装备
5.1.1 注意事项
确认在传输和保存过程中驱动器完好
工作环境的空气应该是无尘,无油、无刺激性气体。最后,如果需要的话,应该采取一
些适当的措施(如加装过滤装置,并保持经常清洁)。
由于能量的消耗会导致温度升高,所以应该确保驱动器周围空气流通。
保持一定的安装间隔
如果在驱动器安装的位置存在持久振动问题,需要考虑到减震的措施。
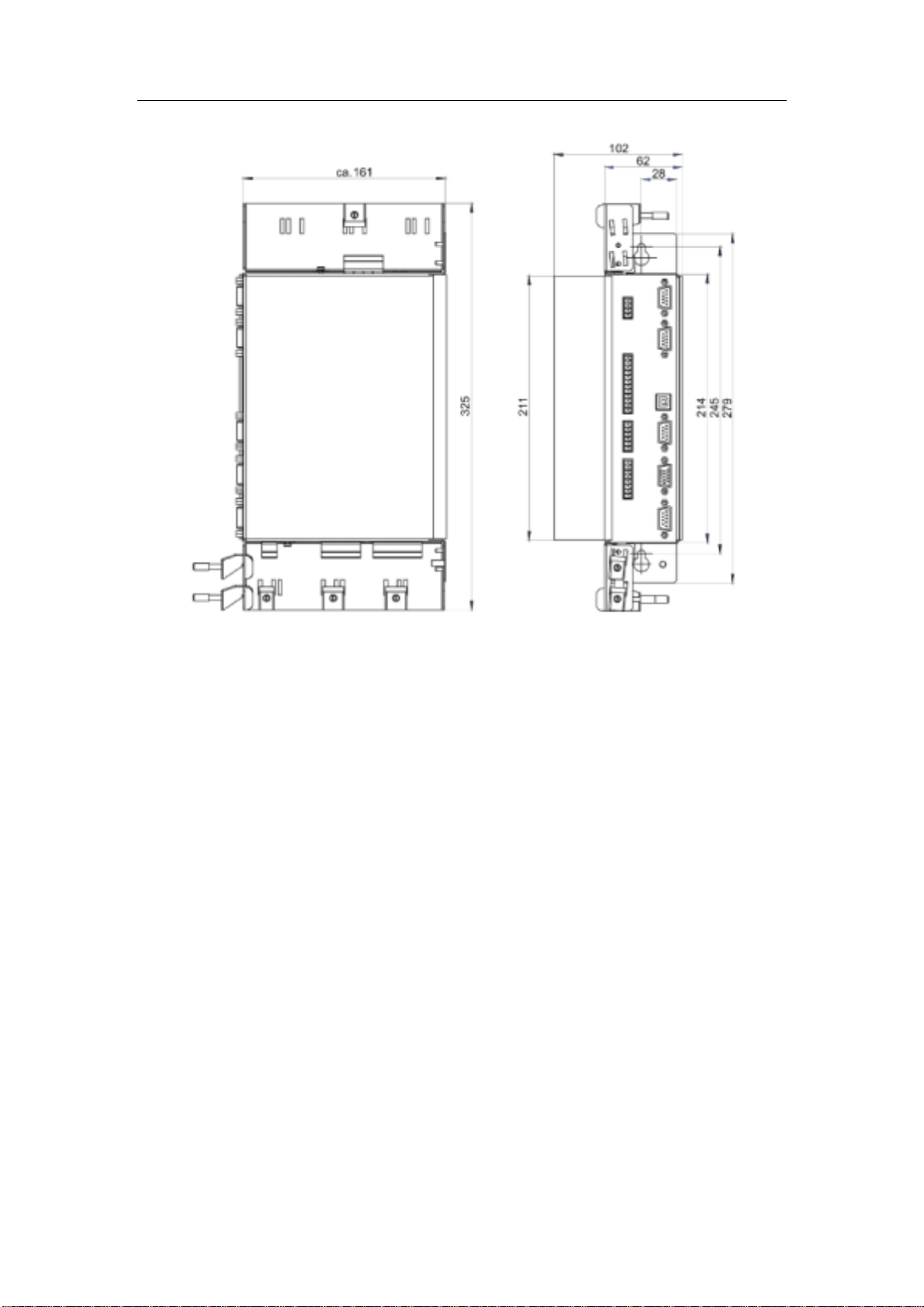
5.1.2 尺寸
13/13
Page 14
Kinco® ECOVARIO
®
系列伺服驱动器使用手册
图 5.1 ECOVARIO®的尺寸(mm)
5.1.3 装配
电缆夹和侧面的金属板可以确保连接电缆的屏蔽线(网)连接到设备接地部分间的连接符合
EMC 标准。
带有电缆夹的防护板作为可选附件,参考图 5.2(参见表 9.1)。非常重要的一点是,应该确
保在伺服放大器的上面或下面没有部件阻碍空气的流通。
如果使用了散热装置(参见 9.1.1 章节的相关内容),安装间隔应该增加 40 毫米。
安装底板的表面应该是可导电(如镀锌)。一定不能使用油漆涂刷过的底板。
14/14
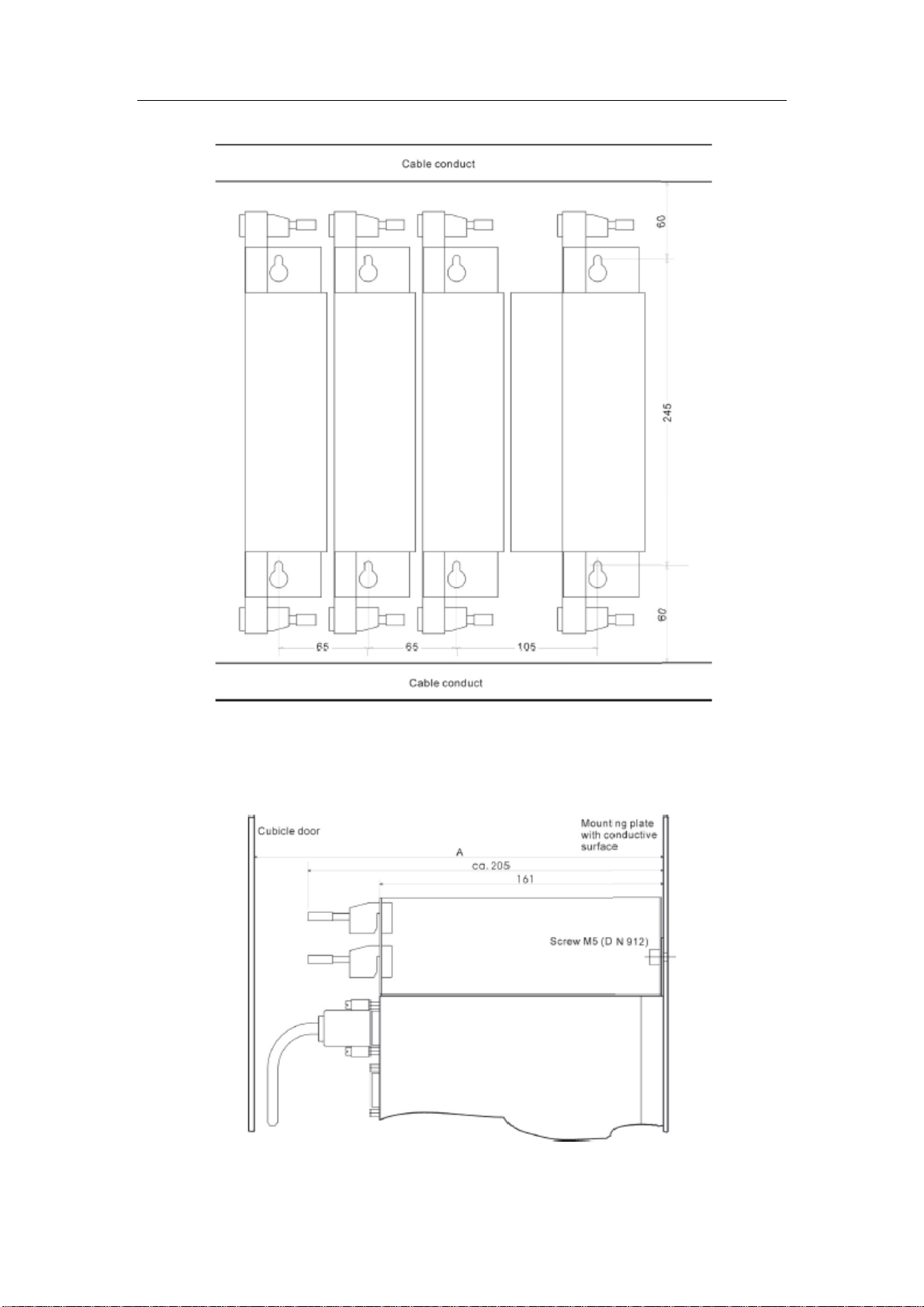
Page 15
Kinco® ECOVARIO
®
系列伺服驱动器使用手册
图 5.2 底板的内部和宽度尺寸(mm)
在计算安装用底板到控制柜门最小的深度尺寸(图 5.3)时,需要注意连接头的尺寸和出线
方向以及连接电缆的最小弯曲半径。
图 5.3 底盘的内部和深度尺寸
15/15
Page 16

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
5.2 电气安装
5.2.1 注意事项
所有的安装工作必须在机器或设备处于非活动状态进行,并且避免机器突然重启。
决不能在 X6 连接器上接超过最大额定值的电压。
ECOVARIO® 214 A x-xx-xxx xxx:U
ECOVARIO®414A x-xx-xxx xxx:U
NETZ最大值105V AC(+10%)
NETZ最大值230V AC(+10%)
直流或交流电源和24V的逻辑电压的防护措施应该由用户来实现。
伺服放大器和电机应该有良好的接地。接地线至少应该和电源线一样粗细。伺服放大器应该
安装在可以导电(没有涂漆)的金属底板上。
5.2.2 EMC 安装
机器的电源输入端需要配备一套合适的 RFI 抑制滤波器. 最好在任何情况下都使用屏蔽电
缆。尽量使用原厂提供的 ECOVARIO® 底板套件去连接电缆接地端和接地设备。(参考 9.1 节
“ECOVARIO® 原配附件”)。
控制柜内部的金属部分必须是互相连接的,并且可以互相传导。使用的继电器、接触器、固
体继电器等必须注意过压保护。电源线和电机电缆必须与控制电缆保持适当的距离。
16/16
Page 17

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
图 5.4 ECOVARIO®的接线图
5.2.4 电源类型
伺服驱动器只能根据下面表格中的标准进行供电。过高的电压会导致驱动器内部的损坏。
ECOVARIO® 414 伺服驱动器可以直接在相线和中线间给 TN 或 TT 系统连接单相 230V 交流电
压。
经过自耦变压器,可以通过接地中点接到 400Vac 的 TN 或 TT 系统。对其他系统来说(非良
17/17
Page 18
Kinco® ECOVARIO
®
系列伺服驱动器使用手册
好接地或未接地),使用一个隔离变压器是非常必要的。使用隔离变压器时,我们强烈建议
将 DC link 的负极接地。使用自耦变压器时应该注意的是,驱动系统的所有部件,例如整流
器、制动电路、电机等必须满足绝缘要求。
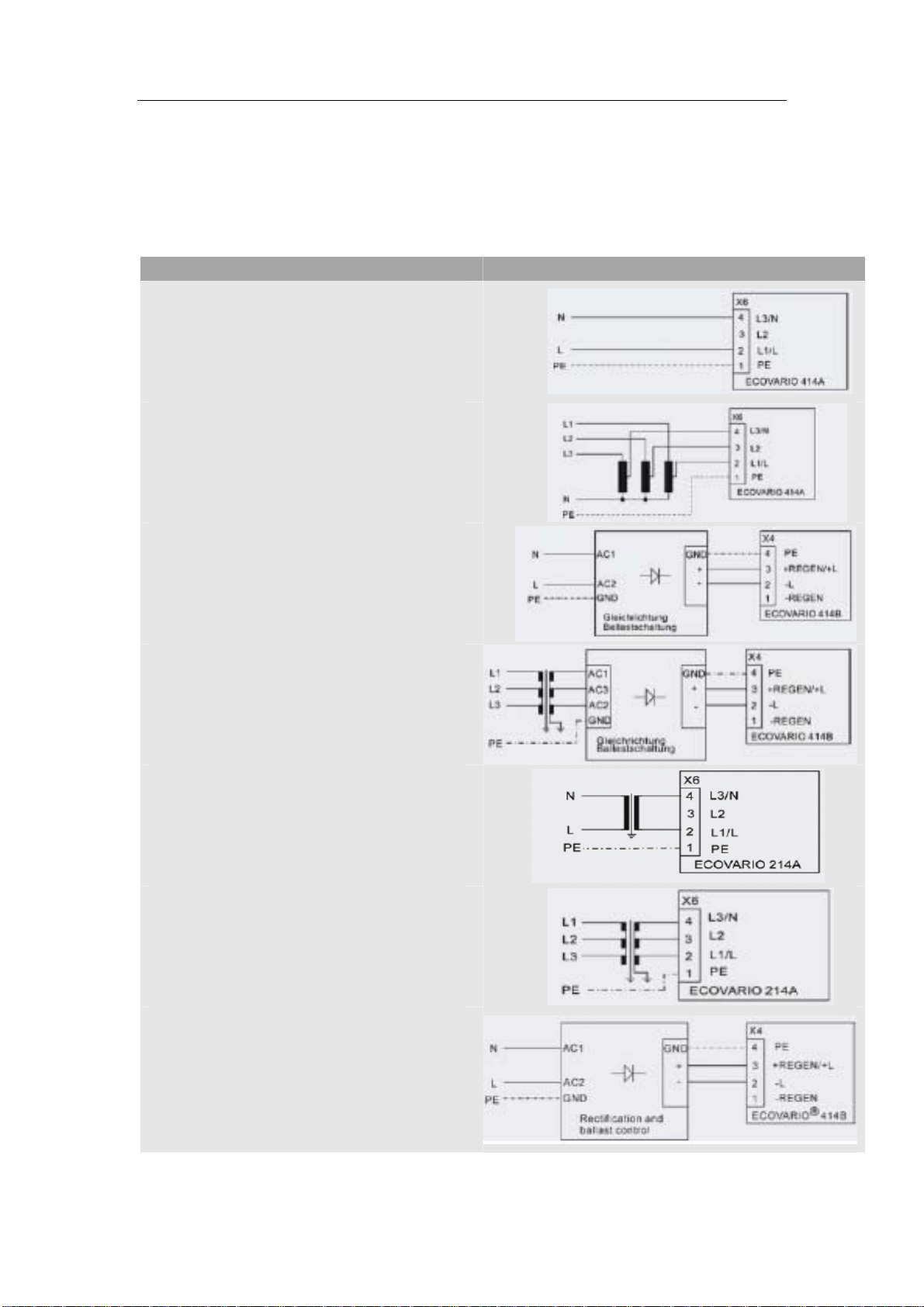
表 5.1: ECOVARIO®连接 TN-S 系统的几种接线
ECOVARIO®型号 电路图(不带接触器、保险和滤波器)
ECOVARIO® 4 14 A x-xx-xxx xxx
直接接单相 200Vac 电源的接线
ECOVARIO® 4 14 A x-xx-xxx xxx
通过隔离变压器和自耦变压器接到 3 相 AC 电源
ECOVARIO® 4 14 B x-xx-xxx xxx
经过带制动电路的单相电源整流模块整流出的 DC 电
源
ECOVARIO® 4 14 B x-xx-xxx xxx
经过带制动电路的 3 相电源整流模块整流出的 DC 电
源
ECOVARIO® 2 14 A x-xx-xxx xxx
通过隔离变压器的单相 AC 电源(使用自耦变压器时,
电机必须也采用一种相似的绝缘处理)
ECOVARIO® 2 14 A x-xx-xxx xxx
通过隔离变压器的3相AC电源(使用自耦变压器时,
电机必须也采用一种相似的绝缘处理)
ECOVARIO® 2 14 B x-xx-xxx xxx
通过带制动电路的单相整流器整流出的直流电源
(如果连接 kinco P200BA,只需要连接一个隔离变
压器)
18/18
Page 19

Kinco® ECOVARIO
ECOVARIO® 2 14 B x-xx-xxx xxx
通过 3 相整流出的直流电源(如果连接 KINOC P200
那么只需要使用一个隔离变压器,无需再整流)
通过 ECOVARIO® 的 DC LINK 系统提供直流电源给
ECOVARIO® xxx A x-xx-xxx xxx 和
ECOVARIO® xxx Bx-xx-xxx xxx
5.2.5 对有残留电流处理
®
系列伺服驱动器使用手册
19/19
Page 20

Kinco® ECOVARIO
6.接口
6.1 接口定义
®
系列伺服驱动器使用手册
图 6.1 接口定义
X1 到 X8 接口都有一个标配的插头(见表 9.1: “ECOVARIO®原配附件”),为了方便安装,
每个插头都有一个标签便于识别。
6.2 控制信号
20/20
Page 21

Kinco® ECOVARIO
表 6.1: X1 口针脚定义
信号 针脚 说明
OUT1 1 数字输出口 1
lo max = 0.5A
OUT2 2 数字输出口 2
lo max = 0.5A
READY(OUT3) 3 Ready/数字输出口 3
RESET(DIN1) 4 Reset/数字输入口 1
ENABLE(DIN2) 5 Enable/数字输入口 2
GND 6 24V 地
+24V 7 24V 电源
GND 8 24V 地
Iototal =
最大 1A
®
系列伺服驱动器使用手册
表 6.2
6.2.2 X2: 数字输入口
表 6.2 X2 口针脚定义
图 6.3: X1 连接口:数字输入和输出电路
21/21
Page 22

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
信号 针脚 说明
GND 1 24V 地
CW1(DIN3) 2 正方向限位输入口
CCW1(DIN4) 3 负方向限位输入口
HOME(DIN5) 4 原点输入口
DIN6 5 数字输入口 6
GND 6 24V 地
Iototal =
最大 1A
图 6.4: X2 口连接插头
MC 1,5/6-ST-3,81,1803617 Phoenix
图 6.5: X2 连接口:数字输入和输出口电路
6.2.3 X3: 模拟量输入和输出
表 6.3: X3 口针脚定义
22/22
Page 23

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
信号 针脚 说明
+15V 1 经过 1KΩ输出地+15V
AGND 2 模拟信号地
-15V 3 经过 1KΩ输出地-15V
AIN1+ 4 模拟量输入 1+
AIN1- 5 模拟量输入 1-
AGND 6 模拟量地
AIN2+ 7 模拟量输入 2+
AIN2- 8 模拟量输入 2-
AGND 9 模拟量地
MON1 10 模拟量输出 1
MON2 11 模拟量输出 2
AGND 12 模拟量地
可以提供电
源给外部控
制单元
差分 AIN1
差分 AIN2
图 6.6: X3 口连接插头
MC1,5/12-ST-3,81,1803675 Phoenix
图 6.7 X3 连接器: 模拟量输入和输出口电路
23/23
Page 24

Kinco® ECOVARIO
6.3 电源接口
6.3.1 X4: DC Link 电压和制动电阻
®
系列伺服驱动器使用手册
X4 接口可以用于连接一个外部制动电阻,也可
以用于直接连接到 DC 电源。
外部负载制动电阻(针对 AC 电源计算)
伺服驱动器本身内部没有制动电阻。在刹车时
能量会反馈给驱动器造成 DC Link 电压增加。
如果驱动器从速度ω1 减速到ω2 , 反馈给驱
动器能力 EBR:
最大再生能量 EN-P 根据下面公司计算:
(见 4.1 节“电源额定数据”)
一个外部的制动电阻可以避免 DC Link 电压上
升造成过压。
ECOVARIO®附件中提供地制动电阻 DPRxx-xxx 采
取了安全措施,无需再接地回路上加保险,使
用了其它公司制动电阻和接地导体的驱动器,
必须使用保险。
使用直流电源的驱动器
为了避免影响到直流电源输
入,输入电流不应该由驱动
器限制。因此,必须在外部
电源上采取特殊地措施。一
旦有再生能量产生,电源单
元必须配备一个制动电路以
避免再生出地能量高于连接
到 DC 母线上所有单元消耗的
能量。
图 6.9 X4: 制动电阻和 DC Link 电路
表 6.5 电流最大值
ECOVARIO®
单位 214A 414A
外部制动电阻 Ω 10 27
最大过压 V 200 400
连续电压负载电流 KW 0, 5(使用
尖峰电压负载电流 KW 4 6
图 6.8 X4 口连接插头
ZEC 1,5/4-ST-7,5 C1,2 R1,4 NZX4 19 98 19 5 Phoenix
表 6.4 X4 连接器针脚定义
信号 键 针脚
-R R 1
-L -L 2 DC Link -
+L/+R +L/R 3
说明
制动电阻 -
DC Link+/
+制动电阻
PE PE 4
DPR10-200 时
为 0,2
PE 导体
0, 5( 使 用
DPR10-200 时 为
0,2
24/24
Page 25

Kinco® ECOVARIO
6.3.2 X5: 电机
图 6.10: X5 配套用插头: ZEC 1,5/5-ST-7,5 C2,5 R1, 5 NZX5 1998 179 Phoenix
使用 >25m 长的电缆,功率损
耗会由于电缆电容原因加大。
因此在使用长电缆时,驱动器
标准技术参数要相应降低,更
严重时,过高渗漏电流会导致
电流制动装置不温度(见 5.2.5
节“操作带有残余电流设备”)
提供的所有电缆见 9.4 节。
使用一根电缆连接电机和抱闸
抱闸电缆屏蔽线和整个绝缘金
属网必须连接到可靠地和保护
地。由于不正确接地和多余金
属网都会在外壳上造成 危险
电压。
表 6.6: X5 接口针脚定义
信号 键 针脚 2 相电机 3 相电机
A 相(电机 U) A/U 2 A 相+ U
A 相-(电机 V) -A/V 3 A 相- V
B 相(电机 W) B/W 4 B 相+ W
B 相-(空闲) -B 5 B 相-
PE PE 1 PE 导体
®
系列伺服驱动器使用手册
图 6.12: 与标准电缆 MOT63-134-523-xxx 连接
25/25
Page 26

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.3.3 电压连接
信号 信号 针脚 说明
PE PE 1 PE 地
L1/L L1/L 2 3 相:L1;单相:L
L2 L2 3 3 相:L2;单相:空
L3/N L3/N 4 3 相:L3;单相:N
图 6.13: 配套 X6 地插头: ZEC 1,5/4-ST-7,5 C2,4
R1,4 NZX6,19 98 Phoenix
ECOVARIO®伺服驱动器绝不可以连接到 3 相 400Vac 电源。不同型号的 ECOVARIO®驱动器最大
输入电源必须参考参数表。
浪涌电流限制
图 6.14: X6 口电路
浪涌电流通过一个温度控制的电阻最大容许到 50A。在 DC Link 充电后,通过一个继电器转
接到该限流电阻,然后在正常工作时又可以冷却下来。在上电(switch on)和断电(switch
off)两个动作之间,至少间隔 10s。 通过接触器对伺服驱动器循环的上电和断电时不允许
的。在上电和断电间,伺服驱动器应该处于“ready to switch on”状态。之间,至少间隔
10s。 通过接触器对伺服驱动器循环的上电和断电时不允许的。在上电和断电间,伺服驱动
器应该处于“ready to switch on”状态。
相滤波器
用户必须确保使用的滤波器符合 EMC 标准(89/336/EEC)。
熔断器(保险)
外部使用的熔断器参考 4.2 节技术数据。
26/26
Page 27

Kinco® ECOVARIO
®
6.4 X7:抱闸
表 6.8: X7 接口针脚定义
信号 符号 针脚
GND 1
Brake+ +B 2 Imax peak = 1A
Brake- -B 3 Imax cont. =
0.5A
如果控制回路断开,保持电流在输出抱闸电流后自动减小。
如果抱闸消耗电流过高,适合连接一个中间继电器(见图 6.16)。
系列伺服驱动器使用手册
27/27
Page 28

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.5 安全功能
6.5.1 X8:重启锁
型号为 xxx S-x x-xxx xxx 和 xxx x R-x x-xxx xxx 的 ECOVARIO®驱动器均带有重启用途
到功能锁。
表 6.9: X8 接口针脚定义
信号 符合 针脚
ASI+ 1 安全继电器断路+
ASI- 2 安全继电器断路ASO1 3 信息交互 AS
ASO2 4 信息交互 AS
使用“重启锁”
为了避免驱动器不正常突发形重启,采用一些外部的安全器件,如断路器或者是断开用的继
电器,是非常必要的。
过去惯例,一般采用下面方法:
通过主回路开关断开主回路。缺点:系统重新上电后,DC link 也必须重新冲电。
结果是损失了系统间联系。
通过一个安全开关和接触器断开电机和伺服驱动器。缺点:损失了系统间联系,另
外也增加了多余的布线和其它的器件。
ECOVARIO®的“重启锁”就可以避免上述的缺点。
内部的安全继电器具有安全断开功能,可以关断伺服驱动器的外部电源,并且复位驱动器内
部值。一个自由的触点可以集成到外部的安全电路重。优点:DC Link 无需冲放电,只有低
压部分断开,节省了外部多余的布线和器件。
“重启锁”功能
一个带有安全断开功能的安全继电器,通过在接口 ASI+和 ASI-之间提供 24V 信号,接通该
继电器。
根据不同的工厂安全定义,ECOVARIO®提供了两种版本的“重启锁”:
型号 S:
通过给 ASI+和 ASI-间施加 24V 电压信号,对驱动器制锁
28/28
Page 29

Kinco® ECOVARIO
型号 R:
通过断开 ASI+和 ASI-间的 24V 电压信号,对驱动器制锁
两种型号的安全状态均由 ASO1/ASO2 口送出(如果驱动器处于锁定状态,该触点被关闭)。
3 个使用到的触点功能:
安全状态下,第 1 个触点通过断开门电源实现禁止电源控制。
第 2 个触点信号发布安全继电器的状态给 ECOVARIO®内部控制用。
第 3 个触点信号提供驱动器状态给更高一级的工厂控制。可以用在使能门锁或类似
应用。
“重启锁”步骤
“重启锁”只可以由一个自动控制器激活或在制动(伺服放大器禁止输出并且抱闸激活)后,
控制器仍然可以独立控制状态下手动激活。在安全电路重,用于监控的触点起到和机器的安
全设备之间架构桥梁的作用(例如安全电控门内的完全位置开关)。安全区域用于保护即使
在安全控制门被打开情况下驱动器也不会被无意重启。
相关的安全说明
请参考第 1.3 节伺服放大器 ECOVARIO®使用说明和工作环境。
如果“重启锁”激活,驱动器内部所有晶体管处于高阻抗状态。即使驱动器内部的晶体管损
坏导致电机电流产生,由于没有生成必须的旋转磁场,多极和 2 相伺服电机也不会被启动。
如果安全继电器损坏或电缆折断,安全设备将断开驱动器,这种情况下安全设备桥自然也失
去作用。
如果“重启锁”由一个自动控制器激活,控制信号必须处于可监控状态,以保证在电机旋转
时“重启锁”不会被激活。
“重启锁”可以根据 EN 954-1 标准(即:疲劳与测试安全器件使用原理)使用在第 3 章安
全电路中。通过一些其它的方法,如使用带监控的单相接触器(即:安全接触器)或使用安全
锁,它们的使用都必须符合 EN 954-1 标准。
应用范例
图 6.20 中的范例演示的是一个工厂应用,为一个带有公共电源的 4 个驱动器的安全应用。
每两个驱动器组成一组。每组拥有独立场所并且具有独立的安全设施。每组
每组又可以独立锁住以防止通过 S1 和 S2 不经意启动驱动器。
®
系列伺服驱动器使用手册
29/29
Page 30

Kinco® ECOVARIO
图 6.21: R 系列驱动器 “重启锁”的使用范例。
®
系列伺服驱动器使用手册
图 6.22: S 系列驱动器 “重启锁”的使用范例。
30/30
Page 31

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.6 编码器
ECOVARIO®伺服放大器有两个编码器输入口 X11 和 X12。
编码器输入口 X11
带方波或正弦信号的标准增量式的编码器可以连接到 9 孔编码器 A 插座。
编码器输入口 X12
除标准编码器和正余弦编码器外,HIPERFACE 和 BISS 绝对式编码器也可以连接到 15 孔的编
码器 B 接口。
编码器接口的参数定制
提供 ECOSTEP®系列驱动器可配置的编码器成套参数。利用我们提供的伺服编程软件
ECO2WIN,可以选择不同的编码器对应的参数,并传输到 ECOVARIO®驱动器内部。
6.6.1 X11: 编码器 A 接口
编码器 A 的供电电源通过 ECO2WIN 软件内一个地址来设定选择 5V 或者是 9V,该地址在载入
编码器参数时配置。
编码器电路长度最长 50m。
信号频率最大 2MHz,计数频率 8MHz。
表 6.9: X8 接口针脚定义
信号 针脚 说明
+VENC 1 5V(0.2A)/9V(0.2A)(由软件设定选择)
A 2 A
B 3 B
N 4 N
T+ 5 温度传感器
DGND 6 编码器地
/A 7
/B 8
/N 9
/A
/B
/N
31/31
Page 32

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.6.2 X12: 编码器 B
32/32
Page 33

Kinco® ECOVARIO
表 6.12: 接口 X12 的针脚定义
标准编码器 HIPERFACE(Stegmann SCS) BISS(Hengstler)
Pin 信号
1 Up 5-14V/2 W 可以
2 A A 相+ RefSin 正弦信号 A A 相+
3 B B 相+ RefCos 余弦信号 B B 相+
4 N N 相+ Data 数据通道 Data Data
5 T+ 温度传感器 T+ 温度传感器 T+ 温度传感器
6 DGND Ground DGND Ground DGND Ground
7 /A A 相- Sinus 0.8-1.2Vpp /A A 相-
8 /B B 相- Cosinus 0.8-1.2Vpp /B B 相-
9 /N N 相- /Data /数据通道 /Data /Data
10 T- T- 温度传感器 T- 温度传感器
11 S- S- 传感器 DGND S- 传感器 DGND
12 S+ S+ 传感器 Up S+ 传感器 Up
13 /Encoder Fail /编码器故障 /Encoder Fail /编码器故障 /Encoder
14 CLK CLK
15 /CLK /CLK
说明 信号
Up 5-14V/2 W 可以经
经过外部 R 配置
说明 信号 说明
过外部 R 配置
®
系列伺服驱动器使用手册
Up 5-14V/2 W 可
以经过外部 R
配置
/编码器故障
Fail
设定电源电压
电压 Up 通过下列公式计算
Up=5V((R1/R2)+1) (3)
电阻范围 4.7KΩ到 47KΩ.用于 BISS 编码器的 ABS 65-300-525-xx 标准电缆已经含有设定配
置。电缆长度最长 50m。
如果输入接口针脚 13 切到低电平 0V,ECOVARIO®会判断编码器故障。如果故障输入没有激
活,信号在内部会上拉到高电平。
33/33
Page 34

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
34/34
Page 35

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.7 串行接口
6.7.1 X13: 带 2 个快速捕捉输入口的 RS485/RS232 接口
ECOVARIO®驱动器提供 1 个 RS485 接口或 RS232 接口,每个接口都带两个快速捕捉输入,用
于高速信号输入。
ECOVARIO® x xx x x-A x-xxx xxx: 设计带 RS485 接口
ECOVARIO® x xx x x-F x-xxx xxx: 设计带 RS485 接口
ECOVARIO® x xx x x-B x-xxx xxx: 设计带 RS232 接口
ECOVARIO® x xx x x-G x-xxx xxx: 设计带 RS232 接口
35/35
Page 36

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
RS485 接口设计
表 6.13: X13 接口针脚信号定义
针脚 信号 说明
1 CAP1+ 捕捉输入口 1+( RS422 级)
2 Rx+ RS485 接收+
3 Tx+ RS485 发送+
4 CAP2+ 捕捉输入口 2+(RS422 级)
5 DGND 数字地
6 CAP1- 捕捉输入口 1- (RS422 级)
7 Rx- RS485 接收-
8 Tx- RS485 发送-
9 CAP2- 捕捉输入口 2- (RS422 级)
不同于常见的串行接口,X13 接口提供两个捕捉输入口,使用 RS322 信号传输用于快速处理
外部事件。两个捕捉输入口没有进行电气隔离处理,也可以配置为数字输入。
ECOVARIO®的 RS485 口既可以做为 4 线全双工也可以做为 2 线半双工方式使用。ECOVARIO®
的传输和接收信号符合 EIA-RS485(最大到 250K 波特率)标准,根据 IEC 61000-4-4 进行
EMC 保护处理。
通讯协议允许在一个主机下,最多可以带 126 个 ECOVARIO®从站。在一个网络里至少可以有
32 个参与同时通讯。网络必须使用一种主线架构。
ECOVARIO®的地址(ID)通过驱动器前面板 ID 拨码进行设置。在一个网络中,每一个 ID 只
能分配给一个驱动器使用。ID=0 为系统保留,不能设置为驱动器 ID。
36/36
Page 37

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
RS232 接口设计
不同于普通的串行接口,X13 提供了两个捕捉输入,使用 RS422 信号
传输用于快速事件捕捉。
除了可以使用 USB 接口外,经过 RS232 接口可以连接到 1 个 PC,设
置 ECOVARIO®的参数。如何设置 RS232 接口参数请参考 ECOVARIO®产
品手册。
使用 RS232 与 ECOVARIO®通讯时,与上位机的连接采用
3 线直通连接。ECOVARIO®的 X13 接口与上位机串口连
接采用 1:1 标准直连。ECOVARIO®的发送和接收符合
EIA-232E 和 CCITT V.28 参数要求,根据 IEC 61000-4-2
进行 EMC 保护处理。
通讯协议允许在一个 Mono 主站网络里最多使用到 126
个 ECOVARIO®驱动器做为从站。在使用多个 ECOVARIO®
做为从站时必须使用图 6.32 的环形网络结构。
针脚 信号 说明
1 CAP1+ 捕捉输入口 1+( RS422 级)
2 TxD
3 RxD
4 CAP2+ 捕捉输入口 2+(RS422 级)
5 DGND 数字地
6 CAP1- 捕捉输入口 1- (RS422 级)
7 n.c. 未使用
8 n.c. 未使用
9 CAP2- 捕捉输入口 2- (RS422 级)
表 6.13: X13 接口针脚信号定义
RS232 TxD
RS232 RxD
37/37
Page 38

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.7.2 X14 USB 接口参数定义
ECOVARIO®的 USB 口是用于 PC 机编程和参数设置使用。一个 USB
电缆 A-B 连接 ECOVARIO®的 USB 口(B 型 USB 口)和 PC 的 USB
口。
USB 口根据 IEC 61000-4-2 进行 EMC 保护处理。 通过 USB 口进
行通讯首先要设置 ECOVARIO®的ID地址。ID地址通过 ECOVARIO®
的前面板按键设置。在网络中的每一个驱动器必须设置一个唯
一的 ID 地址。ID=0 为系统内部保留不可以分配给驱动器使用。
38/38
Page 39

Kinco® ECOVARIO
表 6.15: X14 USB 口针脚定义
针脚 信号 说明
1 USB_VBUS USB_+5V
2 USB_D- USB data 3 USB_D+ USB data+
4 USB_GND USB 地
6.8 CAN 接口 X21
ECOVARIO®的 CAN 口基于 CiA DS 301 通讯规则和 CiA DSP 402
设备规则(驱动和运动控制)设计。必须由外部提供电源。
ECOVARIO®内部没有提供终端电阻。1 个 CAN 总线网络必须在始
端和末端各提供 1 个 120Ω的电阻。 如果 ECOVARIO®工作在 CAN
总线网络里的始端或者末端,必须在 X21 的 2 和 7 两个针脚间
连接这个终端电阻。
ECOVARIO®编程手册含有所有提供功能的详细说明。
某个 ID 地址驱动器的 CAN 通讯波特率可以通过驱动器前面的按
键设置(见 7.3.3“键操作”一节)或者直接通过相应的 CAN 对
象地址设定)
ECOVARIO®支持下列波特率:1000Kbit/s,500Kbit/s,
250Kbit/s,125Kbit/s,100Kbit/s,50Kbit/s.这些值符合通用
8.16bit CAN 控制器寄存器标准(兼容 ECOSTEP®),并归类
ECOVARIO® CAN 控制器地址表。如果采样和扫描频率(86.7%, 在
所有波特率下 3 倍采样频率)满足不了需要,请联系深圳市亚
特精科有限公司技术服务人员。
针脚 信号 说明
1 - 未使用
2 CAN_L CAN 数据“Low”
3 CAN_GND CAN 地
4 - 未使用
5 - 未使用
6 CAN_GND CAN 地
7 CAN_H CAN 数据“High”
8 - 未使用
9 CAN_V+ CAN 电源+
®
系列伺服驱动器使用手册
表 6.16: X21 接口针脚定义
39/39
Page 40

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
6.9 可选其它接口
ECOVARIO®提供系列接口:
ECOVARIO® x xx xx-A x-xxx xxx: CAN + RS485 + 编码器仿真
ECOVARIO® x xx xx-B x-xxx xxx: CAN + RS232 + 编码器仿真
ECOVARIO® x xx xx-F x-xxx xxx: CAN + RS485 + PROFIBUS DP-V0
ECOVARIO® x xx xx-G x-xxx xxx: CAN + RS232 + PROFIBUS DP-V0
更多选项(例如 以太网 Powerlink)接口将在将来版本驱动器上提供。
6.9.1 X22: 带编码器仿真的接口设计
编码器仿真接口由外部提供 5V 电源。
设置的按时有分辨率和 index 信号位置。
电缆最长为 10m。
表 6.17: 设计为用于编码器仿真输出功能的
X22 接口针脚定义
针脚 信号 说明
1 ENC_5V 电源(外部提供)
2 A A 相
3 B B 相
4 Z Z 相
5 ENC_GND 编码器信号地
6 CAN_GND 编码器信号地
7 /A A 相/
8 /B B 相/
9 /Z Z 相/
40/40
Page 41

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
图 6.42 设计用于编码器仿真输出的 X22 口接线图
6.9.2 设计为 PROFIBUS DP-V0 的 X22 接口
表 6.18: 用于 PROFIBUS DP-V0 通讯的
X22 接口针脚定义
针脚 信号 说明
1 - 未使用
针脚的定义符合 EN 50 170 标准。
除 RxD/TxD+, RxD/TxD-, PB_GND 和 PB_5V 信号外,也支持
CNTR(RTS, 数据控制信号)。该控制信号可以用于控制一个中继
器和一个光纤连接转换器(OLP, 光纤连接插头)。
ECOVARIO®的总线接口与设备的其它部分做了电气隔离处理,通
过一个 1MΩ电阻和 1nF 的电容和参考电压连接。该接口电源由
驱动器提供,无需外部提供电源。
插口的外壳与地(GND)连接.
所有的单元连接在一个总线网络中,在一个网段中可以最多连接 32 个单元(主或从站)。每一个网段在开始和
末端有一个活动的总线端子模块。(见图 6.43).
为了避免误操作,必须确保所有的总线端子模块连续提供。总线端子模块一般在总线连接器部分实现。如果超
过 32 个单元和扩展网络,网段之间必须使用中继器连接。
使用一根带屏蔽网的电缆,并且没有分开使用、屏蔽网接地,这些对利于 PROFIBUS 通讯。这些方法有利于增加
控制柜抗干扰能力。
建议用户使用带下列特性的标准的 A 型电缆做为 PROFIBUS DP-V0 电缆:
2 - 未使用
3 RxD/TxD+ PB 数据+
4 CNTR-P PB 控制
5 PB_GND PB 信号地
6 PB_5V
7 8 RxD/TxD- PB 数据-
9 - 未使用/
PB 5V
PB 5V
41/41
Page 42

Kinco® ECOVARIO
纹波阻抗: 135-165Ω
每单元长度电容:<30pF/m
环路阻抗: 110Ω/km
导线之间: 0.64MM
导线直径: >0.34mm2
®
系列伺服驱动器使用手册
图 6.44: 设计为 PROFIBUS DP-V0 功能的 X22 接口电路图
最大电缆长度决定于传输速率,例如 187.5Kbit/s 传输速率,最大电缆长度 1200m; 12Mbit/s
的传输速率,最大电缆长度不超过 100m。
当传输速率≥1.5Mbit/s, 必须使用”SPUR LINES”。共用一个连接头,可以使电缆直接接
入到连接头或从连接头接出,使用“SPUR LINES”和连接头可以在接入总线网络时避免中断
网络里数据传输。
在两端提供一个连接头同事也应该提供一个中继器。另外,在每一个连接头端对每一个流出
数据的导线间纵向电感具有 100nH。 这样的连接头西门子公司有提供。
PROFIBUS DP-V0 屏蔽电缆不可以用作电位补偿。在不同点接点的设备必须使用一个独立的
PE 导体,该导体阻抗至少小于 10 倍电缆屏蔽网的阻抗。
42/42
Page 43

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
7. 试运转
7.1 试运转前注意事项
只有具备相当丰富的电子工程技术、自控技术的专业人员才能被允许运行ECOVARIO®伺
服放大器。如果需要,深圳市亚特精科将提供相关的培训。
机器的生产厂家对机器的进行了必要的危险性分析,并且采取适当的措施确保一些无法
预料的动作不会对人身以及财产造成伤害。
检查配线是否完整,短路以及接地是否可靠。
所有活动的部分必须有安全防护避免人员触碰。工作电压为400V。
不要在带电状况下插拔连接端子。
在机器运转过程中,散热片和驱动器安装底板温度可能会升至70℃以上,所以,在关闭
电源,并且温度降到40℃以下前,请避免碰触这些部件。
7.2 控制和显示单元
在ECOVARIO®驱动器前端面板有1个7段LED指示灯和两个控制键。
指示灯显示现在的状态以及故障信息。如果状态和故障信息字超过1个,那么它们显示
时会1个跟着1个显示出来,而且每个字之间显示间隔时间为0.5S。
按下前面板上的S1键,显示驱动器内部设定的当前CAN波特率值,按下S2键,按照引导
程序产生的地址ID号显示。这个ID地址值会显示两次,在“引导模式”,下面的设置可以通
过这两个按键完成:
在CAN,USB,RS232,RS485或PROFIBUS 网络中的ID地址(节点ID),
用于CAN网络的波特率
显示在故障区存储的错误信息
重启引导程序和硬件
7.3 试运行前的操作顺序
1. 检查安装
检查接线是否完整,以及是否短路和接地是否可靠。
2.使能输入
在连接口X1上连接“ENABLE”和0V。
3. 接通24V输入电压
在连接器X1的GND和+24V端子间施加24V的电压;在初始化后大概3秒钟,LED指示灯显
示伺服放大器的工作状态。
4.纠正最后的故障
如果驱动器显示有故障,在试运行前一定要矫正该故障。
5.启动设定软件
将一台电脑与ECOVARIO®的PC接口相连,并且启动EVO2WIN软件。在该软件中可以检查
并修改系统参数。
6.设置参数
对每一个具体的项目驱动器内部的参数也要做相应的调整。错误的参数设置可能导致
伤害或对机器部件造成损坏。
43/43
Page 44

Kinco® ECOVARIO
正确地设置如下参数尤其重要:
地址ID
相电压
电机的极对数
电机的最大电流
电机的最大速度
7. 检查安全保护装置
当您在接通电源前,非常重要的事情是一定要检查安全保护装置是否能够保护人不会
碰触到设备的运动部分,避免由于不经意的运动造成对人和财务的损害。
8. 将输入置于零
在接通电源前,请将用于设定位置和速度的模拟量和数字输入信号置于零,也就是说
在上电后不要有这些信号触发电机的动作。
9.接通电源
电源开关应该采用一个类似于接触器的电路来 通/断设备的供电。
10. ENABLE
接通电源后0.5s,Enable输入端会变为"高电平"(X1输入24V:ENABLE).如果电机
产生震动或有嗡嗡的声音,则说明速度环KP值需要降低.
11. 优化参数
见本手册第八章"设置参数"和编程手册.
®
系列伺服驱动器使用手册
7.3.1 状态显示
如果在设备启动后不久,在显示器上显示"L",则表示设备处于主模式.
在"Eco"后面会跟着一个驱动器类型吗(214或414),而且只显示一次.
无参数available
LED显示Uc表示通讯或控制参数不可用或者无效,设备处于"未配置"状态.当设置并
保存参数后,必须重启驱动器.
操作
LED显示0. 驱动器处于静止状态(电源关闭),"0"指示闪烁.
LED显示8. 驱动器处于活动状态(电源打开),"8"指示闪烁.
按下S1键,显示目前的CAN波特率.按下S2键,按照引导程序产生的地址ID号被显示,并且
这些信息文字在显示值后面只显示一次.
Blocking
LED显示8╝,驱动器处于激活状态,而且处于正方向极限位置。
显示屏显示8╚,伺服放大器处于活动状态,而且处于负方向极限位置。
显示屏显示8╚╝,伺服放大器处于活动状态,正/负限位输入都会有信号输入
保存参数
44/44
Page 45

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
在EEPROM中进行保存参数的过程中,显示屏显示"P".随后显示前面显示的值.
故障显示
在装载软件过程中发现的故障,将显示该错误.在引导模式中,按任意键可以中断错误的
显示,随后故障存储器中的故障信息可以被显示(参见7.1"键操作顺序").通常情况下
只显示最后一个错误信息.如果显示的错误信息被删除(如果可能),则显示错误列表中
的下一条错误信息.
7.3.2 错误信息
在装载软件过程中发现的故障,将显示该错误.在引导模式中,按任意键可以中断错
误的显示,随后故障存储器中的故障信息可以被显示(参见7.1"键操作顺序").通常情
况下只显示最后一个错误信息.
表7.1 故障信息列表
代码 名称 故障 解决措施
组A 常见故障
A00 CRC_ERR 一个“bootloader区”错误的校验获
整个校验错误
A01 ERASE_ERR 删除一个flash区时故障 更新Flash,如果故障重复发生,寄
A02 UNLOCK_ERR 在激活flash内存时故障 更新Flash,如果故障重复发生,寄
A03 PROG_ERR 在对falsh内存区编程时故障 更新Flash,如果故障重复发生,寄
A04 ADDR_ERR 定位flash内存地址时故障 更新Flash,如果故障重复发生,寄
A10 EEPROM_RW_ERR 读写EEPROM区故障 如果故障重复发生,寄回厂家
A11 EEPROM_CRC_ERR 一个EEPROM区不正确校验计算 如果故障重复发生,寄回厂家
A12 RAM_ERR RAM测试故障 如果故障重复发生,寄回厂家
A20 CAL_ERR 内部校准数据错误 寄回厂家
A21 WATCDOG_ERR 标准loadware 看门狗故障 如果故障重复发生,寄回厂家
A22 PLD_VERSION_ERR 不适用于loadware的PLD firmware 寄回厂家
A23 HARDWARE_ERR Loadware不支持该驱动器 使用正确的Loadware
组B 总线故障
B00 CAN_BUS_ERR CAN总线处于被动模式 检查总线接线和设备功能
B01 CAN_PAR_ERR 没有参数提供,不正确保存参数 再次插入参数,检查节点ID和波特率
组E 编码器故障
E00 ENC_ERROR_A 编码器A信号故障,没有设置编码器
参数
更新Flash,如果故障重复发生,寄
回给厂家
回给厂家
回给厂家
回给厂家
回给厂家
检查编码器线和电缆是否折断,如果
没有可以设定的参数,选择另一种编
码器
45/45
Page 46

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
E10 ENC_ERROR_B 编码器B信号故障或故障输入激活
(在X12口)
E01 CAP_ERR_A 编码器A或正余弦编码器捕获故障 检查编码器线和电缆是否折断
E11 CAP_ERR_B 编码器B或正余弦编码器捕获故障,
绝对式编码器故障
E02 INTERP_ERR_A 正余弦编码器A 插补故障 检查编码器线和电缆
E12 INTERP_ERR_B 正余弦编码器B 插补故障 检查编码器线和电缆
E03 SPEED_ERR_A 编码器A速度过高或无法读取数据 检查参数(电机速度是否过高)
E13 SPEED_ERR_B 编码器B速度过高或无法读取数据 检查参数(限制电机速度)
E14 M_DAT_ERR 不能读取电机数据 检查编码器和电缆以及配置的参数,
E15 M_DAT_VALID 无效的电机数据 输入正确的命令
E16 U_DAT_ERR 在读取用户数据时故障 检查编码器和电缆以及配置的参数,
E17 U_DAT_VALID 无效的用户数据或电机、伺服驱动器
参数不匹配
组D 设备和轴故障
D00 SAFE_INH_ERR “重启锁”在上电时堵塞 检查“重启锁”
D01 EX_ENABLE 外部没有使能 检查是否有使能信号
D02 TEMP_ERR_COOL 散热片温度 > 85℃ 断开电源,冷却
D03 TEMP_ERR_DEVICE 驱动器表面温度 > 60℃ 断开电源,冷却
D04 MOT_TEMP_ERR_A 电机温度故障(编码器输入A (X11)) 对电机降温
D05 MOT_TEMP_ERR_A 电机温度故障(编码器输入B (X12)) 对电机降温
D10 OC_ERR 电机相线短路和电源接地故障 检查电机和电源电缆
D11 SW_OC_ERR 电源电缆过压 检查电机和电源电缆
D12 LxlxT_DEV 超过驱动器I2t限制 检查参数和工作环境
D13 LxlxT_MOT 超过电机I2t限制 检查参数和工作环境
D20 UVMESS X1口外部24V电源低于18V 检查24V电源
D21 OV_ERR DC电压过高,ballast短路 检查DC link和Ballast 电路
D22 UV_ERR DC link电压过低 检查电压
D23 OL_BREAK 抱闸过载 检查轴参数设置和工作环境
D24 T_LOAD_ERR 超过DC link充电时间 检查电压
D25 OUT_DIAG 数字输出和抱闸输出短路或过载 检查READY,OUT1,OUT2和抱闸输出
D30 FOLLOWINGERR 跟随误差过高 检查轴参数和工作环境
D31 COMMUFINDERR 励磁未发现 检测周是否可以自由运动
D32 SWD_ERR 软件内部复位 如果故障重复发生请寄回厂家
D33 REGLER_ERR 控制器看门狗故障 如果故障重复发生请寄回厂家
检查编码器线和电缆是否折断
检查编码器线和电缆是否折断
如果故障重复发生寄回编码器
如果故障重复发生寄回编码器
输入正确的命令
7.3.3 按键操作
“启动模式”的设置可以用按键操作实现。调用“启动模式”有三种方式。
24V 控制电源为 ON 时同时按下两键。
24V 控制电源为 ON 时发生一个故障。
46/46
Page 47

Kinco® ECOVARIO
通过 PC 软件调用“启动模式”
按键功能说明
S1 键 :选择、菜单导航和增加显示值。
S2 键 :确认、菜单选择和接受数值。
®
系列伺服驱动器使用手册
图 7.01: 按键操作顺序图
47/47
Page 48

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
8. 参数设置
可以调整 ECOVARIO®设置参数适合不同应用.参数设置用计算机上运行的一个软件进行。
ECO2WIN 用户界面使用菜单驱动,很容易操作处理。
计算机和 ECOVARIO®连接有三种接口:
USB
CAN
RS232(可选择)
8.1 ECO2WIN 用户接口
怎样使用 ECO2WIN 在 ECOVARIO®编程手册中有详细说明。
8.1.1 硬件和操作系统要求
ECO2WIN 支持 Windows 98 以上的所有 Windows 操作系统,通过 Windows 可以很容易安装和
卸载。
最小的硬件需求:
处理器:Intel Pentium 或兼容系列 主频大于等于 800MHZ
内存 :256MB 或更大
硬盘 :80MB 或更大
显示器:SVGA(1024 X 768 分辨率)
光驱 :CD-ROM
鼠标,触摸面板等
接口:一个 232 接口,一个通过 Peak Light Dongle 的 CAN 总线口( Peak CAN USB 适配
器(Windows 2000 系统或更高)和 Peak CAN PCI 卡都支持),一个 USB 接口(1.1 或 2.0)
(Windows 2000 系统或更高)。
8.1.2 ECO2WIN 用户接口功能
ECO2WIN 软件是交互式菜单形式,有详尽的帮助文档库。以下功能介绍较为详细:
具有自动识别通讯接口和手动配置
驱动器自动识别和手动配置
用预配置的电机数据库进行电机配置
依据机械数据自动配置 ECOVARIO®
工程管理
开始回原点,初始化运动,正反向
评估功能:显示实际和状态数据,示波器功能
程序段的编制
48/48
Page 49

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
9 附件
表 9.1ECOVARIO®原配附件总览表
订货号 描述 适合的 ECOVARIO®型号
补充部分
DPX10 带安装元件的 ECOVARIO®散热片 所有类型
DPZ10 屏蔽套件(带 2 个侧面板、4 个电缆夹
和安装元件)
DPK10 连接插头套件 所有类型
制动电阻(目前国内不提供)
DPR10-100 10 欧 100 瓦(250W 有冷却) ECOVARIO® 2xx xx-xx-xxx xxx
DPR10-200
DPR27-100 27 欧 100 瓦(250W 有冷却)
DPR27-200 27 欧 200 瓦(500W 有冷却)
参数调试附件
VARIOSWITCH ECOVARIO®的诊断工具 所有
ECOVARIO® USB starter kit 包:USB A-B
ECOVARIO® CAN starter kit 包:
软件工具
ECO2WIN 软件工具盘:ECO2WIN 安装软
变压器(目前国内不提供)
TD1500-85/105 85/105Vac 1500VA 三相变压器 ECOVARIO® 2xx Ax-xx-xxx xxx oder
TD1000-85/105 85/105Vac 1000VA 三相变压器 ECOVARIO® 2xx Ax-xx-xxx xxx oder
TE500-85/105
电源(除 P200 外目前国内不提供)
SV24/85/105 单相 85/105Vac 和 24V 直流 ECOVARIO® 2xx-Ax-xx-xxx xxx oder
SV150 单相 150V 直流,带刹车 ECOVARIO® 2xx-Bx-xx-xxx xxx
SV24 单相 24V 直流 所有
P200-BA-000 电源模组 ECOVARIO® 2xx-Bx-xx-xxx xxx
电缆
10 欧 200 瓦(500W 有冷却) ECOVARIO® 2xx xx-xx-xxx xxx
电 缆 , 一 张 ECO2WIN 软 件 光 盘 和
VARIOSWITCH
一张 ECO2WIN 光盘、一个 VARIOSWITCH,
一个带驱动软件的 PCAN 并口适配器,
一根 CAN 电源电缆
件和文档
85/105Vac 500VA 单相变压器 ECOVARIO® 2xx Ax-xx-xxx xxx oder
所有类型
ECOVARIO® 4xx xx-xx-xxx xxx
ECOVARIO® 4xx xx-xx-xxx xxx
所有
所有
所有
ECOVARIO® 2xx Bx-xx-xxx xxx mit
P200-BA-000
ECOVARIO® 2xx Bx-xx-xxx xxx mit
P200-BA-000
ECOVARIO® 2xx Bx-xx-xxx xxx mit
P200-BA-000
ECOVARIO® 2xx-Bx-xx-xxx xxx mit
P200-BA-000
49/49
Page 50

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
Ink65-491-525-xxx ECOSTEP®和 ECOVARIO®电机的编码器
电缆(增量型或正余旋编码器)
ABS65-300-525-xxx 带 BiSS 编码器的 ECOVARIO®电机 编码
器电缆
MOT61-133-523-xxx 不带抱闸的 ECOVARIO®电机电缆 所有
MOT63-134-523-xxx 带抱闸的 ECOVARIO®电机电缆 所有
所有
所有
9.1 附属部分
9.1.1 散热片
散热片套件的组成:
一个用于 ECOVARIO®驱动器的散热片 DPX10
4 颗 M4x 16 的螺丝钉(DIN 912)
4 个 4.3mm 锯齿形垫圈(DIN6798)
9.1.2 屏蔽套件
屏蔽设备组成:
2 个 14mm 的屏蔽夹子
2 个 8mm 的屏蔽夹子
2个 ECOVARIO®的屏蔽金属板
2 个 M3 x 6 的螺丝钉(DIN 912)
2个 3.2mm 的锯齿形垫圈(DIN 6798)
50/50
Page 51

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
51/51
Page 52

Kinco® ECOVARIO
9.2 定制参数用附件
9.2.1 VARIOSWITCH
VARIOSWITCH 是 ECOVARIO®产品家族中一个插拔模块,它能指示输入输出位的状态,允许通
过开关对数字输入和电位器控制模拟量输入.
VARIOSWITCH 能够直接插入 ECOVARIO® 的 X1,X2 和 X3 连接器,在它的上端显示有 ECOVARIO®
的连接器.
VARIOSWITCH 仅用做功能验证,它没有紧急停止和安全功能,特别是 VARIOSWITCH
用在直线系统中,仔细观察 VARIOSWITCH 开关状态是很重要的,因为限位开关通
过 VARIOSWITCH 转换后可能被忽略.
®
系列伺服驱动器使用手册
VARIOSWITCH 的功能
监控功能
模块单元 24V 电源指示
输入输出端子状态显示
52/52
Page 53

Kinco® ECOVARIO
模拟信号监控
模拟功能
开关选择使用外部信号还是 24V 信号做为数字口输入
开关选择使用外部信号还是通过电位计的±10V 做为模拟量输入
9.2.2 ECOVARIO®启动工具包(USB 版本)
启动工具包包含了测试伺服放大器所有必需的组件:
一个 USB A-B 电缆
一个 VARIOSWITCH 模块
一个附带 ECO2WIN 安装软件和文档的 CD 光盘
USB 电缆标有A的头接 PC 电脑,标有 B 的头接 ECOVARIO®的 USB 接口
9.2.3 ECOVARIO®启动工具包(CAN 版本)
®
系列伺服驱动器使用手册
如果调整参数和验证 ECOVARIO®功能通过过一个可选的 CAN 接口进行,那么能够用电脑通过
CAN 附件对 ECOVARIO®进行控制.该启动工具包包含了测试伺服所用必须组件:
集成有电源的 CAN 电缆
USB PCAN Dongle 及其驱动软件
一个 VARIOSWITCH 模块
一个附带 ECO2WIN 安装软件和文档的 CD 光盘
9.3 制动电阻
DPR 系列制动电阻是经过短路试验的,属于安全电阻,外部为铝壳。
持续过载和自由传导安全属性:
不会短路
不会对外壳有短接故障
不会着火
不会溶化保护性外壳
保护等级:IP65
符合标准:cCSAus, cURus
注意:散热外壳温度可能会高达 350℃, 辫状连接电缆的长度:510±40 mm,线径 1.5mm2或
AWG 规格 16
交货范围还包括用于安装的连接件
9.3.1 制动电阻 100W (有冷却时 250W)
DPR10-100 10Ω100W(250W cooled) 适合于 ECVARIO 2 xx xx-xx-xxx xxx
DPR27-100 27Ω100W(250W cooled) 适合于 ECVARIO 4 xx xx-xx-xxx xxx
53/53
Page 54

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
框图 9.6 特征曲线左侧下方覆盖了 DPRxx-100 制动电阻的所有情况
结构条件
测试准则:标准时间 120S,以平均功率为基准,外壳温度由框图 9.7 的曲线表示.
平均功率用下面的公式计算 Pm=P[w] x 冗余 [%] / 100 (4)
在框图 9.9 的特征曲线上,根据选定的脉冲强度的取值,加上 5k 就为外表的温度
54/54
Page 55

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
9.3.2 制动电阻 200W (有冷却时 500W)
DPR10-200 10Ω100W(500W 有冷却) 适合于 ECVARIO 2xx-xx-xx-xxx xxx
DPR27-200 27Ω100W(500W 有冷却) 适合于 ECVARIO 4xx-xx-xx-xxx xxx
55/55
Page 56

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
框图 9.9 特征曲线左侧下方覆盖了 DPRxx-200 制动电阻的所有情况
结构条件
测试准则:标准时间 120S,以平均功率为基准,外壳温度由框图 9.10 的曲线表示.
平均功率用公式 (4) 计算
56/56
Page 57

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
在框图 9.10 的特征曲线上,根据选定的脉冲强度的取值,加上 5k 就为外表的温度
9.4 ECVARIO 匹配的连接件
ECOVARIO®所有接口的连接头都可以提供给用户,这些连接件都带有标签,不会给用户造成
混淆。
表 9.2 ECOVARIO® 连接插头
接头 功能 Phoenix 端子名称
X1 24V/数字量输入和输出 MC 1,5/8-ST-3,81 18 03 63 3
X2 数字量输入 MC 1,5/6-ST-3,81 18 03 61 1
X3 模拟量输入输出 MC 1,5/12-ST-3,81 18 03 67 5
X4 DC link/制动电阻 ZEC1,5/4-ST-7,5 C1 2R1,4NZX4 19 98 19 5
X5 电机插头 ZEC1,5/5-ST-7,5 C2 5R1,5NZX5 19 98 17 9
X6 电源插头 ZEC1,5/4-ST-7,5 C2 4R1,4NZX6 19 98 18 2
X7 电机刹车插头 ZEC1,5/3-ST-3,5 C1 3R1,4NZX7 19 98 20 5
X8 启动锁定插头 MC 1,5/4-ST-3,81 18 03 59 4
9.5 电缆
电缆的绝缘屏蔽网必须接到设备的地或 PE 导体上,接地和屏蔽接得不好,均可能产生危险
的电压。
57/57
Page 58

Kinco® ECOVARIO
表 9.3 ECOVARIO®电缆附件
类型 应用
编码器电缆(国内为不同的型号,请参考 KINCO 步进伺服选型手册)
Ink65-491-525-xxx ECOSTEP®和 ECOVARIO®电机的编码器
电缆(增量型或正余旋编码器)
ABS65-300-525-xxx 带 BISS 的 ECOVARIO® 编码器电缆
电机电缆(国内为不同型号,请参考 KINCO 步进伺服选型手册)
MOT61-133-523-xxx 不带刹车 ECOVARIO®电机电缆
MOT63-134-523-xxx 带刹车 ECOVARIO®电机电缆
®
系列伺服驱动器使用手册
上表的所有电缆最长可以到 50 米,挠度直径是 100mm,电缆外壳耐温 80℃
58/58
Page 59

Kinco® ECOVARIO
®
系列伺服驱动器使用手册
10 附录
10.1 术语表
Regent Circuit 制动回路,把刹车回馈给电源的能量转化为热量,
因此 DC 电压温度会上升得比较高。
BiSS 带双向的传感器接口
Bootload Mode 启动模式,在这种模式下,新的软件配置文
件能够传送到伺服放大器的存储区
Brake Chopper 刹车开关电路产生一个很高且迅速的电流,它迅
速启动刹车,然后逐渐减小到一个很小的值,并保持这个值.
Capture input 能捕捉外部机械或设备快速输入事件
Circuit Breaker 电路开关,当通过的电流超过极限电流偏差时,电路开关就关断电
源
DC Link votage 平滑的直流电压
Disable 取消伺服的使能,使能输入端子电压为零
Encoder 测量系统,它把轴的角度位置或直线位置转化成编码数值
EMC 电磁兼容性
Enable 伺服的使能信号 24V 直流信号
ESD Protect 静电保护
Fieldbus Interface CAN 或 PROFIBUS DVP-V0 现场总线接口
Firmware 存储于只读存储器的软件程序,包括启动程序
Ground fault 电源接地或电机相线和 PE 短接
Host 在多计算机系统中管理整个系统的计算机
ID number 总线结构中用于标志设备的地址号
Loadware 存储于伺服放大器闪存中的配置软件
Node 总线结构中设备连在一起的节点
Restart lock 通过机械元件预防不经意的重新启动,而保证调试人员安全的技术
措施
Sequence programming 依据外部输入数据状态或内部数据状态,编辑一个事件顺序表格程
序
Token Passing 令牌传送
Token system 令牌传送系统
Watchdog 监控程序
10.2 图表索引
59/59
Page 60

Kinco® ECOVARIO
10.3 公式索引
(1)Energy difference EBR EBR=1/2 J (ω12-ω22)
(2)Regenerable Energy EN-P EN-P=1/2 CL (UBUSP2-UBUSN2)
(3)Supply Voltage UP UP=5V(R1/R2+1)
(4)Average Power Mm Mm=P[w] x ED[%]/100
10.4 引用标准和指导规范索引
DIN 912 用 DIN EN ISO 4762 标准代替
DIN 6978 没有替代 撤销
DIN EN 954-1 机械安全 控制系统安全部分 第一章基本设计原则
DIN EN 50 170 一般用途的通讯系统
DIN EN 50 170 电子设备电源安装
DIN EN 60 204 机械安全 机械电气设备,第一章基本要求
DIN EN 61 800-3 调节速度的电力驱动系统 第三章电磁兼容产品标准,包括详细的测
试方法
DIN EN 61 800-5-1 调节速度的电力驱动系统 第五章一节电力,热能和能源安全要求
DIN EN ISO 4762 六角形螺丝钉
DIN EN ISO 12 100-1 机械安全 设计的基本概念和基本原则 第一章基本术语和方法
DIN EN ISO 12 100-2 机械安全 设计的基本概念和基本原则 第二章技术原则
IEC 61000-4-2 电磁兼容 第四章第二节预防静电测试和实验技术
IEC 61000-4-4 电磁兼容 第四章第二节电流传送和防暴的测试和实验技术
9837EC 欧洲议会和一些成员国的与机械相关的指导原则
73/23/EEC 欧洲议会指导成员国电子设备电压应用限制一致性法律
89/336/EEC 欧洲议会指导成员国电磁兼容相近的法律
®
系列伺服驱动器使用手册
60/60
 Loading...
Loading...