


User's Guide
HP 8169A Polarization Controller
SERIAL NUMBERS
This guide applies to all instruments.
ABCDE
HP Part No. 08169-91011
Printed in the Federal Republic of Germany
First Edition
E0396

Notices
This document contains proprietary
information that is protected by
copyright. All rights are reserved.
No part of this document may be
photocopied, reproduced, or
translated to another language
without the prior written consent of
Hewlett-Packard GmbH.
c
Copyright 1993 by:
Hewlett-Packard GmbH
Herrenberger Str. 130
71034 Boeblingen
Federal Republic of Germany
Subject Matter
The information in this document is
subject to change without notice.
Hewlett-Packard makes no warranty
of any kind with regard to this
printed material, including, but not
limited to, the implied warranties of
merchantability and tness for a
particular purpose.
Hewlett-Packard shall not be liable
for errors contained herein or for
incidental or consequential damages
in connection with the furnishing,
performance, or use of this material.
Printing History
New editions are complete revisions
of the guide reecting alterations in
the functionality of the instrument.
Updates are occasionally made to
the guide between editions. The
date on the title page changes when
an updated guide is published. To
nd out the current revision of the
guide, or to purchase an updated
guide, contact your Hewlett-Packard
representative.
Control Serial Number: First Edition
applies directly to all instruments.
Warranty
This Hewlett-Packard instrument
product is warranted against defects
in material and workmanship for a
period of one year from date of
shipment. During the warranty
period, HP will, at its option, either
repair or replace products that prove
to be defective.
For warranty service or repair, this
product must be returned to a service
facility designated by HP. Buyer shall
prepay shipping charges to HP and
HP shall pay shipping charges to
return the product to Buyer.
However, Buyer shall pay all shipping
charges, duties, and taxes for
products returned to HP from
another country.
HP warrants that its software and
rmware designated by HP for use
with an instrument will execute its
programming instructions when
properly installed on that instrument.
HP does not warrant that the
operation of the instrument,
software, or rmware will be
uninterrupted or error free.
Limitation of Warranty
The foregoing warranty shall not
apply to defects resulting from
improper or inadequate maintenance
by Buyer, Buyer-supplied software or
interfacing, unauthorized
modication or misuse, operation
outside of the environmental
specications for the product, or
improper site preparation or
maintenance.
No other warranty is expressed or
implied. Hewlett-Packard specically
disclaims the implied warranties of
Merchantability and Fitness for a
Particular Purpose.
First Edition : 1st September 1994 : 08169-91011 : E0994
: 1st March 1996 : 08169-91011 : E0396
Exclusive Remedies
The remedies provided herein are
Buyer's sole and exclusive remedies.
Hewlett-Packard shall not be liable
for any direct, indirect, special,
incidental, or consequential
damages whether based on contract,
tort, or any other legal theory.
Assistance
Product maintenance agreements
and other customer assistance
agreements are available for
Hewlett-Packard products.For any
assistance contact your nearest
Hewlett-Packard Sales and Service
Oce.
Certication
Hewlett-Packard Company certies
that this product met its published
specications at the time of
shipment from the factory.
Hewlett-Packard further certies
that its calibration measurements
are traceable to the United States
National Institute of Standards and
Technology, NIST (formerly the
United States National Bureau of
Standards, NBS) to the extent
allowed by the Institutes's
calibration facility, and to the
calibration facilities of other
International Standards Organization
members.
ISO 9001 Certication
Produced to ISO 9001 international
quality system standard as part of
our objective of continually
increasing customer satisfaction
through improved process control.


Safety Summary
The following general safety precautions must be observed during all phases
of operation, service, and repair of this instrument. Failure to comply with
these precautions or with specic warnings elsewhere in this manual violates
safety standards of design, manufacture
, and intended use of the instrument.
Hewlett-Packard Company assumes no liability for the customer's failure to
comply with these requirements.
General
This is a Safety Class 1 instrument (provided with terminal for
protective earthing) and has been manufactured and tested according to
international safety standards.
Operation - Before applying power
Comply with the installation section.
Additionally, the following shall be observed:
Do not remove instrument covers when operating.
Before the instrument is switched on, all protective earth terminals
, extension
cords, auto-transformers and devices connected to it should be connected to a
protective earth via a ground socket. Any interruption of the protective earth
grounding will cause a potential shock hazard that could result in serious
personal injury.
Whenever it is likely that the protection has been impaired, the instrument
must be made inoperative and be secured against any unintended operation.
Make sure that only fuses with the required rated current and of the specied
type (normal blow, time delay, etc.) are used for replacement. The use of
repaired fuses and the short-circuiting of fuseholders must be avoided.
Adjustments described in the manual are performed with power supplied to
the instrument while protective covers are removed. Be aware that energy at
many points may, if contacted, result in personal injury.
Any adjustments, maintenance, and repair of the opened instrument under
voltage should be avoided as much as possible, and when unavoidable, should
be carried out only by a skilled person who is aware of the hazard involved.
Do not attempt internal service or adjustment unless another person, capable
of rendering rst aid and resuscitation is present. Do not replace components
with power cable connected.
Do not operate the instrument in the presence of ammable gases or fumes.
Operation of any electrical instrument in such an enviroment constitutes a
denite safety hazard.
Do not install substitute parts or perform any unauthorized modication to
the instrument.
Be aware that capacitors inside the instrument may still be charged even if
the instrument has been disconnected from its source of supply.
iv

Safety Symbols
The apparatus will be marked with this symbol when it is
necessary for the user to refer to the instruction manual in
order to protect the apparatus against damage.
Caution, risk of electric shock.
Frame or chassis terminal.
Protective conductor terminal.
Hazardous laser radiation.
Warning
Caution
The WARNING sign denotes a hazard. It calls attention to
a procedure, practice or the like, which, if not correctly
performed or adhered to, could result in injury or loss of
life. Do not proceed beyond a WARNING sign until the
indicated conditions are fully understood and met.
The CAUTION sign denotes a hazard. It calls attention to
an operating procedure, practice or the like, which, if not
correctly performed or adhered to, could result in damage to
or destruction of part or all of the equipment. Do not proceed
beyond a CAUTION sign until the indicated conditions are fully
understood and met.
v


Contents
1. Getting Started
The Basic Operating Principle ................. 1-1
Using the Polarization Controller for Polarization Analysis ... 1-2
Editing ............................ 1-3
Editing Using the Entry Keys . . . . . . . . . . . . . . . . . 1-3
Editing Using the Modify Keys and Knob ........... 1-3
Resetting Parameters . . . . . . . . . . . . . . . . . . . . . 1-4
2. Setting a State of Polarization
Setting up the Hardware . . . . . . . . . . . . . . . . . . . .
Setting the Position of the Polarizing Filter .......... 2-1
Setting the State of Polarization ................ 2-3
Positioning the/4 and/2 Retarder Plates .......... 2-4
Using the Circle Mode .................... 2-4
Example: Setting the Optimum Transmission SoP .. .... 2-4
Set the Polarizing Filter ................. 2-5
Setting the Worst Case Transmission SoP ........ . 2-6
Setting the Optimum Transmission SoP .. ........ 2-7
3. Scanning the Poincare Sphere
Setting up the Hardware . . . . . . . . . . . . . . . . . . . . 3-1
Setting Up and Executing a Scan ................ 3-1
Example: Measuring the Response to a \Depolarized" Signal .. 3-2
Set the Polarizing Filter ........ ........ .. 3-3
Setting Up the Instruments . . . . . . . . . . . . . . . . . 3-4
Running the Scan .... ........ ..... .... 3-4
Example: Measuring a Polarization Dependent Loss ...... 3-5
Set the Polarizing Filter ........ ........ .. 3-6
Setting Up the Instruments . . . . . . . . . . . . . . . . . 3-7
Running the Scan .... ........ ..... .... 3-7
Analyzing the Results .... ........ ...... . 3-7
2-1
Contents-1

4. Other Front Panel Functions
Setting the HP-IB Address ...... ........ ..... 4-1
Storing or Recalling Instrument Settings . . . . . . . . . . . . . 4-1
Storing a Setting . . . . . . . . . . . . . . . . . . . . . . . 4-1
Recalling a Setting . . . . . . . . . . . . . . . . . . . . . . 4-2
Resetting the Instrument . . . . . . . . . . . . . . . . . . . 4-2
5. Programming the Polarization Controller
HP-IB Interface ........................ 5-1
Setting the HP-IB Address ...... ........ ..... 5-3
Returning the Instrument to Local Control ........... 5-3
How the Polarization Controller Receives and Transmits Messages 5-3
How the Input Queue Works ................. 5-3
Clearing the Input Queue . . . . . . . . . . . . . . . . . . 5-4
The Output Queue . . . . . . . . . . . . . . . . . . . . . . 5-4
The Error Queue . . . . . . . . . . . . . . . . . . . . . . . 5-4
Some Notes about Programming and Syntax Diagram Conventions 5-4
Short Form and Long Form.................. 5-5
Command and Query Syntax ................. 5-5
6. Remote Commands
Command Summary ......................
The Common Commands . . . . . . . . . . . . . . . . . . . .
Common Status Information .. ........ ...... . 6-5
SRQ, The Service Request .... ........ ..... 6-6
*CLS .... ........ ...... ........ .. 6-7
*ESE ............................ 6-7
*ESE? . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
*ESR? . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
*IDN? . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-9
*OPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-10
*OPC? ........ ........ ..... ..... 6-10
*RCL ............................ 6-10
*RST .... ........ ...... ........ .. 6-11
*SAV ............................ 6-11
*SRE .... ........ ...... ........ .. 6-12
*SRE? . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-12
*STB? . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-13
*TST? . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-13
*WAI ...... ........ ...... ........ 6-14
Switching On and O the Instrument Display ...... .... 6-15
6-2
6-5
Contents-2

:DISPlay:ENABle ...................... 6-15
:DISPlay:ENABle? . . . . . . . . . . . . . . . . . . . . . 6-15
Positioning the Polarizing Filter . . . . . . . . . . . . . . . . . 6-16
[:INPut]:POSition:POLarizer ...... ........ ... 6-16
[:INPut]:POSition:POLarizer? . . . . . . . . . . . . . . . . 6-16
Setting the State of Polarization ................ 6-17
[:INPut]:CIRCle:EPSilonb . . . . . . . . . . . . . . . . . . . 6-17
[:INPut]:CIRCle:EPSilonb? ................. 6-17
[:INPut]:CIRCle:THETap ................... 6-18
[:INPut]:CIRCle:THETap?.................. 6-18
[:INPut]:POSition:HALF ................... 6-19
[:INPut]:POSition:HALF? . . . . . . . . . . . . . . . . . . 6-19
[:INPut]:POSition:QUARter . . . . . . . . . . . . . . . . . . 6-19
[:INPut]:POSition:QUARter? ................ 6-20
Scanning the Sphere . . . . . . . . . . . . . . . . . . . . . . 6-21
[:INPut]:PSPHere:RATE ........ ........ ... 6-21
[:INPut]:PSPHere:RATE?.................. 6-21
:INITiate[:IMMediate] .................... 6-21
:ABORt . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-21
STATus Commands . . . . . . . . . . . . . . . . . . . . . . . 6-23
Setting Up the STATus Registers .. ........ ..... 6-24
:STATus:PRESet ...................... 6-24
:STATus:OPERation:NTRansition .... ...... ....
:STATus:OPERation:NTRansition? . . . . . . . . . . . . .
6-25
6-25
:STATus:OPERation:PTRansition .............. 6-25
:STATus:OPERation:PTRansition? . . . . . . . . . . . . . 6-25
:STATus:OPERation:ENABle .. ...... ........ 6-25
:STATus:OPERation:ENABle? . . . . . . . . . . . . . . . 6-26
:STATus:QUEStionable:NTRansition . . . . . . . . . . . . . 6-27
:STATus:QUEStionable:NTRansition? ........... 6-27
:STATus:QUEStionable:PTRansition ........ ..... 6-27
:STATus:QUEStionable:PTRansition? .... ...... . 6-27
:STATus:QUEStionable:ENABle . . . . . . . . . . . . . . . 6-27
:STATus:QUEStionable:ENABle? .... ...... ... 6-28
Checking the Status .. ........ ...... ..... 6-29
:STATus:OPERation:CONDition? .............. 6-29
:STATus:OPERation[:EVENt]? . . . . . . . . . . . . . . . . 6-29
:STATus:QUEStionable:CONDition? ............. 6-30
:STATus:QUEStionable[:EVENt]? .............. 6-30
SYSTem Commands ...... ........ ...... .. 6-31
:SYSTem:ERRor? . . . . . . . . . . . . . . . . . . . . . . . 6-31
Contents-3

:SYSTem:VERSion? . . . . . . . . . . . . . . . . . . . . . . 6-31
7. Programming Examples
Example 1 - Checking Communication ............. 7-2
Example 2 - Status Registers and Queues ............ 7-3
Example 3 - Finding the Optimum Transmission SoP . . . . . . . 7-7
Example 4 - Finding the Polarization Dependence ........ 7-11
A. Installation
Safety Considerations ..................... A-1
Initial Inspection . . . . . . . . . . . . . . . . . . . . . . . . A-1
AC Line Power Supply Requirements .............. A-2
Line Power Cable ...................... A-2
Replacing the Fuse . . . . . . . . . . . . . . . . . . . . . . A-4
Replacing the Battery .................... A-5
Operating and Storage Environment .............. A-5
Temperature . . . . . . . . . . . . . . . . . . . . . . . . . A-6
Humidity .......................... A-6
Altitude . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
Installation Category and Pollution Degree .......... A-6
Instrument Positioning and Cooling . . . . . . . . . . . . . . A-6
Switching on the Polarization Controller . . . . . . . . . . . . . A-7
Optical Output . . . . . . . . . . . . . . . . . . . . . . . . .
Trigger Input and Output . . . . . . . . . . . . . . . . . . . .
HP-IB Interface ........................ A-8
Connector . . . . . . . . . . . . . . . . . . . . . . . . . . A-9
HP-IB Logic Levels . . . . . . . . . . . . . . . . . . . . . . A-9
Claims and Repackaging .................... A-10
Return Shipments to HP ................... A-10
A-7
A-8
B. Accessories
Instrument and Options .. ........ ...... .... B-1
HP-IB Cables and Adapters . . . . . . . . . . . . . . . . . . . B-1
Connector Interfaces and Other Accessories . . . . . . . . . . . B-2
Option 021, Straight Contact Connector . . . . . . . . . . . . B-2
Option 022, Angled Contact Connector ............ B-3
Contents-4

C. Specications
Specications ......................... C-1
Other Specications ...................... C-3
Declaration of Conformity ................... C-4
D. Performance Test
Insertion Loss Variation with Rotation of/4 and/2 Plates .. . D-2
Insertion Loss versus Wavelength . . . . . . . . . . . . . . . . D-5
Extinction Ratio of Polarizer .................. D-10
E. Cleaning Procedures
Cleaning Materials . . . . . . . . . . . . . . . . . . . . . . . E-1
Cleaning Fiber/Front-Panel Connectors .... ....... .. E-2
Cleaning Connector Interfaces .. ........ ..... .. E-2
Cleaning Connector Bushings . . . . . . . . . . . . . . . . . . E-3
Cleaning Detector Windows .................. E-3
Cleaning Lens Adapters ...... ........ ...... E-3
Cleaning Detector Lens Interfaces ........ ....... E-4
F. Error Messages
Display Messages ...... ........ ...... ... F-1
HP-IB Messages ........................
Command Errors . . . . . . . . . . . . . . . . . . . . . . .
Execution Errors ......................
Device-Specic Errors ...... ........ ...... F-6
Query Errors ........................ F-7
F-2
F-2
F-5
Index
Contents-5

Figures
6-1. Common Status Registers . . . . . . . . . . . . . . . . . . . 6-6
6-2. The Status Registers . . . . . . . . . . . . . . . . . . . . . 6-24
A-1. Line Power Cables - Plug Identication ............ A-2
A-2. Rear Panel Markings . . . . . . . . . . . . . . . . . . . . . A-4
A-3. Releasing the Fuse Holder .... ...... ........ A-4
A-4. The Fuse Holder . . . . . . . . . . . . . . . . . . . . . . .
A-5. Correct Positioning of the Polarization Controller ....... A-7
A-6. HP-IB Connector . . . . . . . . . . . . . . . . . . . . . . .
B-1. Straight Contact Connector Conguration . . . . . . . . . . .
B-2. Angled Contact Connector Conguration ...........
D-1. Test Setup for Measuring the Insertion Loss .......... D-2
D-2. Test Setup for Measuring the Reference Power . . . . . . . . . D-7
D-3. Test Setup for Measuring the Extinction Ratio . . . . . . . . . D-10
Tables
5-1. HP-IB Capabilities .. ........ ...... ...... 5-2
6-1. Common Command Summary . . . . . . . . . . . . . . . . . 6-2
6-2. Command List . . . . . . . . . . . . . . . . . . . . . . . . 6-3
6-3. Reset State (Default Setting) ................. 6-11
A-1. Temperature . . . . . . . . . . . . . . . . . . . . . . . . . A-6
D-1. Equipment used: ...... ...... ....... ... D-1
A-5
A-9
B-2
B-3
Contents-6
1
Getting Started
This chapter describes the basic operating principle, and the basic operating of
the polarization controller.
The Basic Operating Principle
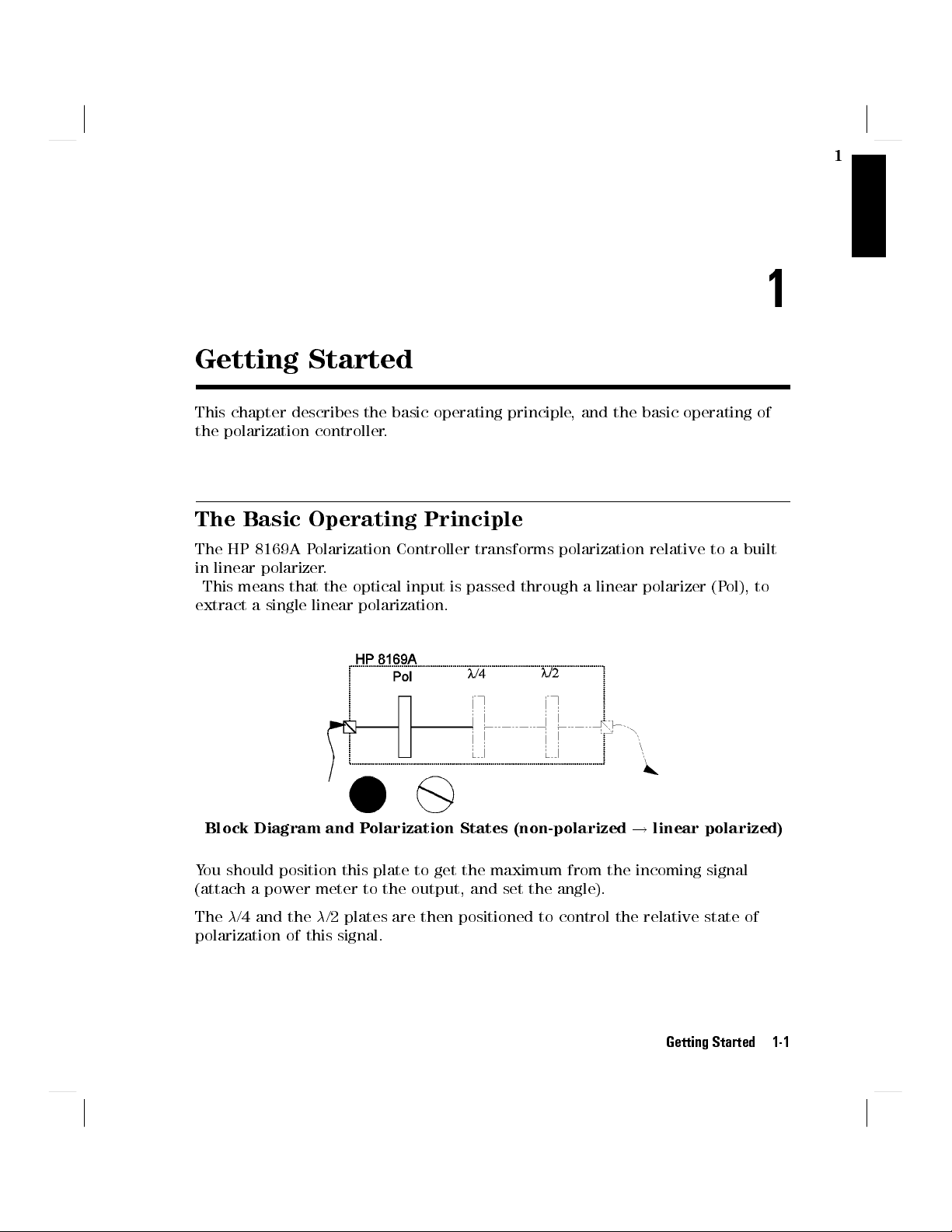
The HP 8169A Polarization Controller transforms polarization relative to a built
in linear polarizer.
This means that the optical input is passed through a linear polarizer (P
extract a single linear polarization.
ol), to
1
Block Diagram and Polarization States (non-polarized!linear polarized)
You should position this plate to get the maximum from the incoming signal
(attach a power meter to the output, and set the angle).
The/4 and the/2 plates are then positioned to control the relative state of
polarization of this signal.
Getting Started 1-1
1
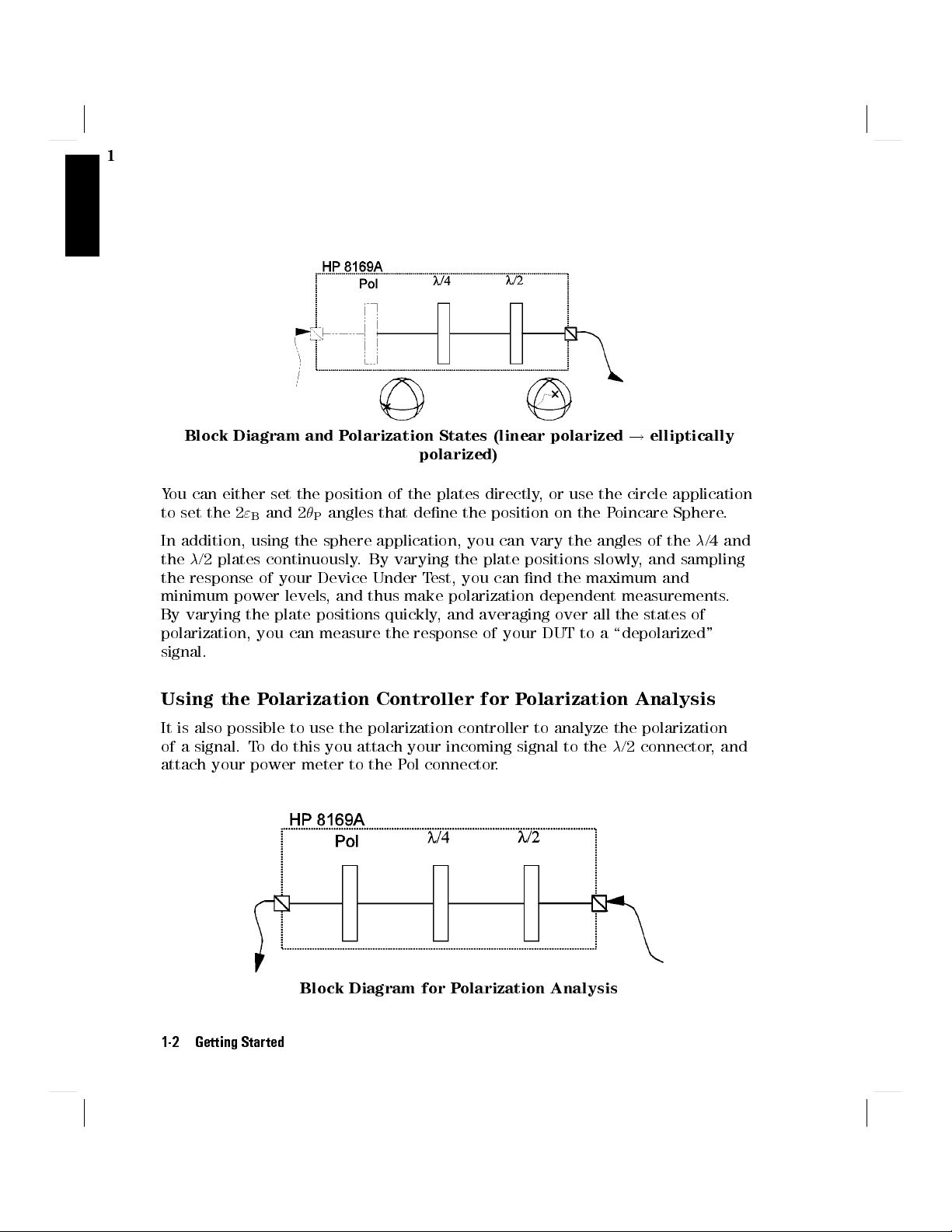
Block Diagram and Polarization States (linear polarized!elliptically
polarized)
You can either set the position of the plates directly, or use the circle application
to set the 2
In addition, using the sphere application, you can vary the angles of the/4 and
the/2 plates continuously. By varying the plate positions slowly, and sampling
the response of your Device Under Test, you can nd the maximum and
minimum power levels, and thus make polarization dependent measurements.
By varying the plate positions quickly, and averaging over all the states of
polarization, you can measure the response of your DUT to a \depolarized"
signal.
"Band 2
Pangles that dene the position on the Poincare Sphere.
Using the Polarization Controller for Polarization Analysis
It is also possible to use the polarization controller to analyze the polarization
of a signal. To do this you attach your incoming signal to the/2 connector, and
attach your power meter to the Pol connector.
Block Diagram for Polarization Analysis
1-2 Getting Started

You analyze the signal by varying the/4 and/2 plates and the polorizer lter,
and examining how this aects the power. It is beyond the scope of this manual
to explain this topic in detail.
Editing
You can edit a parameter by using
the Entry keys,
the Cursor/Vernier keys,or
the Modify knob.
Editing Using the Entry Keys
1. Make sure the correct parameter is selected (the label of the selected
parameter is displayed inverse).
1
2. Type in the new value.
5
3. Press
4
Enter
.
If you mistype the number, you can move the cursor left and right using the
5
5
Cursor keys (
and
4
(
If you want to abort editing, without changing the parameter, press
If the parameter changes back to its old value when you press
).
4
)
NNNNNNNNNNNNNNNNNNN
N
Cancel
4
5
, then the
Enter
new value would be out of the range allowed for that parameter.
Editing Using the Modify Keys and Knob
1. Make sure the correct parameter is selected (the label of the selected
parameter is displayed inverse).
2. Press any of the Cursor/Vernier keys, to activate editing.
5
5
3. Use the Cursor keys (
and
4
(
4. Change the value using the Vernier keys (
) to move to the rst digit you want to edit.
4
)
5
5
and
4
*
).
4
+
OR
Change the value using the Modify knob.
Getting Started 1-3
.

1
5. Repeat steps list item 3 to list item 4 as often as necessary.
6. Press
4
Enter
5
.
NNNNNNNNNNNNNNNNNNNN
If you want to abort editing, without changing the parameter, press
Cancel
.
If you cannot change a digit with the Vernier keys or the Modify knob, this
means that the new value would be out of the range allowed for the parameter.
Resetting Parameters
To reset any parameter
1. Make sure the correct parameter is selected (the label of the selected
parameter is displayed inverse).
NNNNNNNNNNNNNNNNNNNNNN
2.
To reset
N
Press
Default
Pol,/4,/2,2
.
5
, AND2
"
B
simultaneously, press
P
4
Home
.
1-4 Getting Started

Setting a State of Polarization
This chapter describes the two ways of setting a State of Polarization,
By positioning the polarizing lter, the/2, and the/4 plates.
By positioning the polarizing lter, and then specifying the desired position on
the Poincare sphere.
Setting up the Hardware
2
2
Note
Typically, you will connect the polarization controller directly after your source,
and before your device under test (DUT). Before connecting to the rest of your
measurement setup, you should set the position of the polarizing lter.
Setting the Position of the Polarizing Filter
The polarizing lter should be set to maximize the signal. This means aligning
the polarizing lter with the greatest linear polarization of the source. (Light
from laser sources is elliptically polarized).
When you are setting up your hardware, it is absolutely vital
that the bers are xed, and remain unmoved for the whole
of the measurement. Moving the bers changes the state of
polarization.
Setting a State of Polarization 2-1

2
Power as a function of the angle of linear polarization for laser light
1. Connect the output of the polarization controller to a power meter.
Setup for maximizing the test signal
2. With all the instruments turned on, press
4
Home
5
on the polarization
controller. This resets the positions of all the plates.
3.
Select the polarization lter.You may need to press
4
Pos
5
and/or
NNNNNNNNNNN
Pol
if the
lter is not already selected.
4. Move the lter to nd the maximum signal through the polarization
controller. One way of doing this is
a. Press the right Cursor key twice to select the units digit.
b. Watching the power meter, and using the Modify knob, adjust the angle of
the polarization lter, until you are in the area of one of the maxima.
c. Select the tenths digit.
d. Watching the power meter, and using the Modify knob, adjust the angle of
the polarization lter, until you nd the maximum.
e. Select the hundredths digit, and adjust the angle of the polarization lter
if necessary to get the absolute maximum.
2-2 Setting a State of Polarization

5. Disconnect the power meter, and connect to your DUT, and the rest of your
measurement setup, making sure to move the bers as little as possible.
Setting the State of Polarization
The state of polarization of a signal can be described by a position on the
Poincare sphere. This position is can be expressed in spherical coordinates by
two angles, called
"Band
P.
2
Pis the optical angle about the 'equator' of the sphere (that is,2
angle of 'longitude').
"Bis half the angle of elevation from the equatorial plane (that is,2
angle of 'latitude').
The coordinates for describing the state of polarization
The state of polarization is always relative to the output from the polarizing
lter.
P
"
is the
is the
B
There are two ways of setting the state of polarization,
by specifying the position of the/4 and/2 retarder plates,or
by specifying
"Band
P, the coordinates on the Poincare sphere.
Setting a State of Polarization 2-3

2
Positioning the/4 and/2 Retarder Plates
You can set the state of polarization by positioning the/4, and/2 plates.
5
1. Select a retarder plate
with the plates.
Press
NNNNNNNNNNN
/4or
NNNNNNNNNNN
/2if the plate you want is not already selected.
.You may need to press
rst to get the display
4
Pos
2. Move the plate to the position you want. (See \Editing" in Chapter 1 if you
need information on changing the angles).
Using the Circle Mode
You can set the state of polarization by specifying the coordinates on the
Poincare sphere. See \Setting the State of Polarization" for an explanation.
5
1. Select an angle.You may need to press
angles.
Press
NNNNNNNNNN
2
"Bor
NNNNNNNNNN
2
Pif the angle you want is not already selected.
rst to get the display with the
4
Circle
2. Change the angle to the value you want. (See \Editing" in Chapter 1 if you
need information on changing the angles).
Example: Setting the Optimum Transmission SoP
To nd the state of polarization which gives optimum transmission for a linear
device under test (DUT), the steps are
i. Set the polarizing lter.
ii. Find the state of polarization for worst case transmission (this is easier to
nd, because the resolution allows greater accuracy at lower power).
iii. Set the state of polarization for optimum transmission.
For this example, you will need, apart from the polarization controller, a laser
source, and a power meter (in the description below, an HP 8153A Multimeter
with a laser module and a sensor module are used). We will use the length of
ber connecting the instruments as our linear DUT.
1. With both instruments switched o, connect the laser source to the
polarization controller.
2. Connect the polarization controller to the power meter.
2-4 Setting a State of Polarization

Setup for setting the position of the polarizing lter.
3. Switch on both instruments, and enable the laser source.
4. Set the channel with the sensor module to the wavelength of the source,
and select the default averaging speed (200ms).
2
Note
Under normal circumstances you should leave the instruments
to warmup. (The multimeter needs around 20 minutes to
warmup.) Warming up is necessary for accuracy of the sensor,
and the output power of the source.
Set the Polarizing Filter.
5
5. Press
6. Press
on the polarization controller.
4
Home
5
.
4
Pos
7. Set the angle of the polarizing lter for maximum throughput.
a. Type in10and press
b. Press
4)5
twice to select the tens digit.
4
Enter
5
.
c. Using the Modify knob, increase the angle slowly until the power read on
the multimeter increases and then starts to decrease.
5
d. Press
once to select the units digit.
4
)
e. Using the Modify knob, decrease the angle slowly until the power read
on the multimeter starts to decrease.
f. Press
4)5
twice to select the hundredths digit.
Setting a State of Polarization 2-5

2
g. Using the Modify knob
the multimeter starts to decrease
maximum power.
, increase the angle slowly until the power on
. Return to the angle that gave the
Setting the Worst Case Transmission SoP.
for the worst case transmission, because we can nd this more accurately (the
resolution of the power meter stays the same, but the full scale value is lower,
therefore we can be more accurate).
We also use the fact that the relationship between power of the signal
transmitted through the DUT and polarization on the surface of the sphere
can be expressed as concentric circles about the worst case (or optimum), and
that for a linear DUT the worst case and optimum are on opposite sides of the
sphere.
Power contours about the worst case on the poincare sphere
This means that we nd the worst case position by moving around the sphere
along the equator rst (that is nding the angle of longitude of the worst case)
and then the overall worst case by moving around this line of longitude.
We set the state of polarization
2-6 Setting a State of Polarization

Power contours with a search path to the worst case transmission state of
polarization
2
8.
Press
4
Circle
5
, and
NNNNNNN
P, to select
.
P
9. Search for the line of longitude with the minimum power (use a similar
method as for the position of the polarizing lter; rst changing the tens
,
then the units, then the hundredths).
Press
NNNNNNN
"B, to select
"B.
10.
11. Search for the angle of latitude with the minimum power.
Setting the Optimum Transmission SoP.
12. Read the value for
"Bfrom the display.
13. Add 180to this value.
14. Type in the new value, and press
4
Enter
5
.
The state of polarization is now set to the value for the current setup that gives
the greatest power through the ber. This is possible here because the ber
behaves linearly.For non-linear components the polarizations for worst case and
optimum transmission will not be on opposite sides of the sphere, and the angle
between them is a characteristic of the component.
Setting a State of Polarization 2-7


3
Scanning the Poincare Sphere
This chapter describes how you can use your polarization controller to measure
polarization dependence, and how you can generate quasi-depolarized signals.
Setting up the Hardware
Note
Typically, you will connect the polarization controller directly after your source,
and before your device under test (DUT). Before connecting to the rest of your
measurement setup, you should set the position of the polarizing lter (this is
described in \Setting the Position of the Polarizing Filter" in Chapter 2).
Setting Up and Executing a Scan
When you are setting up your hardware, it is absolutely vital
that the bers are xed, and remain unmoved for the whole
of the measurement. Moving the bers changes the state of
polarization.
3
The sphere application changes the state of polarization over time,by
rotating the/2 and/4 plates. The rotations can be done slowly, to give a
quasi-randomly polarized signal, which you can use, with suitable data logging
to measure polarization dependence. The rotations can be done quickly,to
give a quasi-depolarized signal, which you can use, with suitable measurement
averaging time to measure depolarized response.
1. Press
4
Sphere
5
to select the application.
Scanning the Poincare Sphere 3-1

The
Pol
Note
when you press
lter angle shown here is the same as the one shown
4
5
. If you have already set this value, there is
Pos
no need to change it.
2. Set the speed at which theplates rotate:
3
Set
SpeedtoFast
and the averaging time of your power meter to longer
than 1s to get measure the response to depolarized signal.
If it is not already selected:
a. Move the Modify knob.
b.
Select
c.
Press
Set
SpeedtoSlow
Fast
using the Modify knob,
NNNNNNNNNNNNNNNNNNNN
4
5
,or
Enter
Select
and the averaging time of your power meter as short as
4
+
.
5
,or
NNNNN
#
possible, and use logging to measure polarization dependence.
If it is not already selected:
a. Move the Modify knob.
N
b.
Select
c.
Press
3.
When everything is setup, press
Slow
using the Modify knob,
NNNNNNNNNNNNNNNNNNNN
4
5
,or
Enter
Select
.
NNNNNNNNNNNNNN
Exec
4
*
to start the scan.
5
,or
NNNN
"
During the scan, values for the angle of/4 and/2 are shown on the display.
These values are samples. Theplates rotate continuously.
Example: Measuring the Response to a \Depolarized" Signal
To measure the response to a \depolarized" signal for a device under test (DUT),
the steps are
i. Set the polarizing lter.
ii. Set the scanning speed to
Fast
.
iii. Set the averaging time of the power meter.
iv. Start the scan, and measure the value.
For this example, you will need, apart from the polarization controller, a laser
source, and a power meter (in the description below, an HP 8153A Multimeter
3-2 Scanning the Poincare Sphere

with a laser module and a sensor module are used). A roll of ber will act as a
suitable DUT.
1. With both instruments switched o, connect the laser source to the
polarization controller.
2. Connect the polarization controller to the power meter.
Setup for setting the position of the polarizing lter.
3. Switch on both instruments, and enable the laser source.
3
Note
Under normal circumstances you should leave the instruments
to warmup. (The multimeter needs around 20 minutes to
warmup.) Warming up is necessary for accuracy of the sensor,
and the output power of the source.
4. Set the channel with the sensor module to the wavelength of the source,
and select the default averaging speed (200ms) [Press
hold
4
5
Param
to resetT].
4
Param
5
to selectT,
Set the Polarizing Filter
5
5. Press
6. Press
4
4
on the polarization controller.
Home
5
.
Pos
7. Set the angle of the polarizing lter for maximum throughput.
5
a. Type in10and press
b. Press
4)5
twice to select the tens digit.
4
Enter
.
c. Using the Modify knob, increase the angle slowly until the power read on
the multimeter increases and then starts to decrease.
Scanning the Poincare Sphere 3-3
5
d. Press
once to select the units digit.
4
)
e. Using the Modify knob, decrease the angle slowly until the power read
on the multimeter starts to decrease.
f. Press
3
g. Using the Modify knob, increase the angle slowly until the power on
4)5
twice to select the hundredths digit.
the multimeter starts to decrease. Return to the angle that gave the
maximum power.
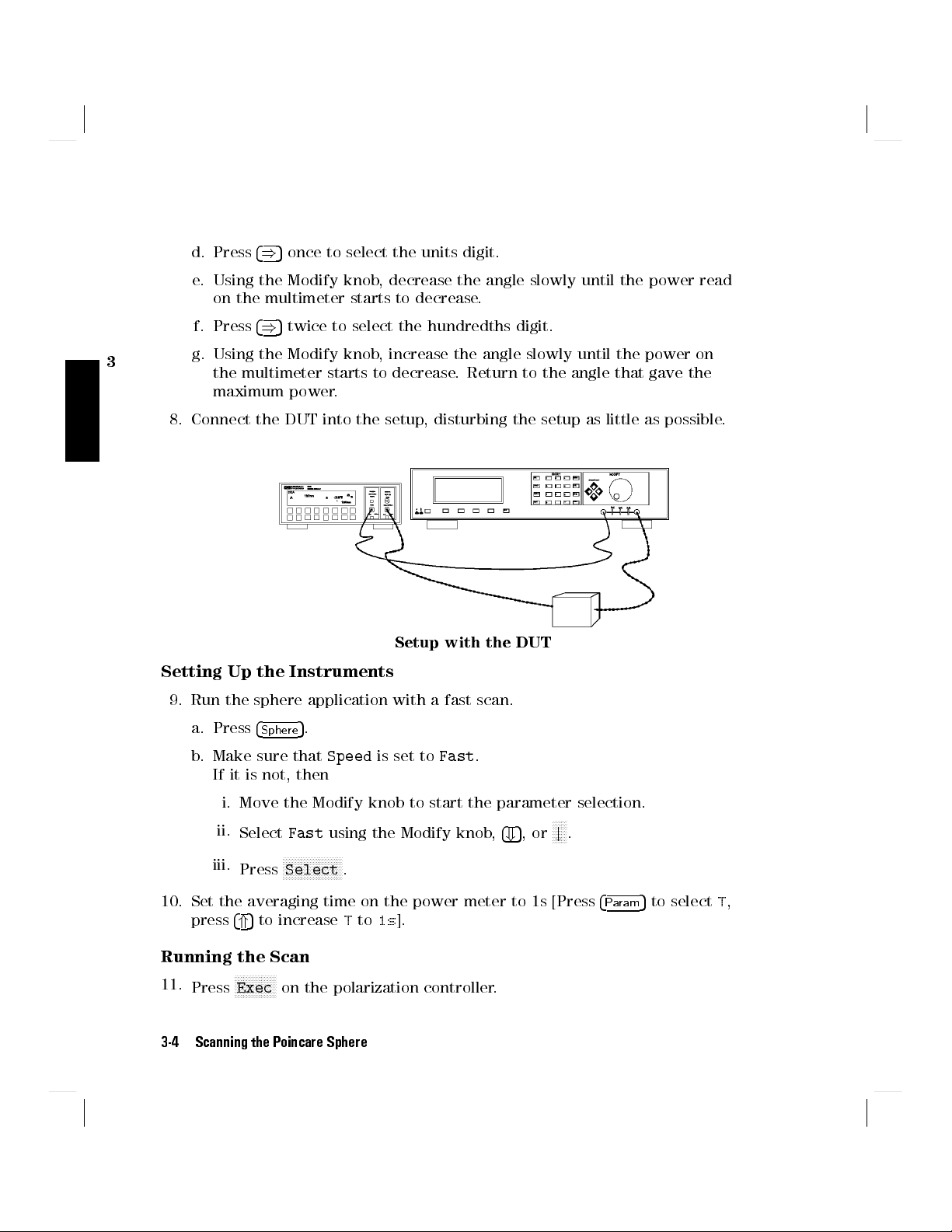
8. Connect the DUT into the setup, disturbing the setup as little as possible.
Setup with the DUT
Setting Up the Instruments
9. Run the sphere application with a fast scan.
a. Press
b. Make sure that
4
Sphere
5
.
Speed
is set to
Fast
.
If it is not, then
i. Move the Modify knob to start the parameter selection.
N
ii.
iii.
Select
Press
Fast
using the Modify knob,
NNNNNNNNNNNNNNNNNNNN
Select
.
4+5
,or
NNNN
#
.
10. Set the averaging time on the power meter to 1s [Press
press
4*5
to increaseTto1s].
Running the Scan
Press
N
Exec
on the polarization controller.
11.
NNNNNNNNNNNNN
3-4 Scanning the Poincare Sphere
4
Param
5
to selectT,

There is a slight delay while the application is initialized, and then the values of
/4 and/2 on the display begin to change.
12. When the application is running, read the value for the response of the DUT
to a depolarised signal from the display for the power sensor.
Example: Measuring a Polarization Dependent Loss
To measure the sensitivity to polarization, apply a quasi-random polarization to
the (DUT), the steps are
i. Set the polarizing lter.
ii. Set the scanning speed to
iii. Set the power meter to record.
iv. Start the scan, and record the readings for dierent polarization states.
v. Analyze the results.
For this example, you will need, apart from the polarization controller, a laser
source, and a power meter (in the description below, an HP 8153A Multimeter
with a laser module and a sensor module are used). A roll of ber will act as a
suitable DUT.
1. With both instruments switched o, connect the laser source to the
polarization controller.
2. Connect the polarization controller to the power meter.
Slow
.
3
Setup for setting the position of the polarizing lter.
3. Switch on both instruments, and enable the laser source.
Scanning the Poincare Sphere 3-5

Note
Under normal circumstances you should leave the instruments
to warmup. (The multimeter needs around 20 minutes to
warmup.) Warming up is necessary for accuracy of the sensor,
and the output power of the source.
3
4. Set the channel with the sensor module to the wavelength of the source,
and select the default averaging speed (200ms) [Press
hold
4
5
to resetT].
Param
4
Param
5
to selectT,
Set the Polarizing Filter
5. Press
6. Press
4
5
on the polarization controller.
Home
4
5
.
Pos
7. Set the angle of the polarizing lter for maximum throughput.
5
a. Type in10and press
5
b. Press
twice to select the tens digit.
4
)
4
Enter
.
c. Using the Modify knob, increase the angle slowly until the power read on
the multimeter increases and then starts to decrease.
d. Press
4)5
once to select the units digit.
e. Using the Modify knob, decrease the angle slowly until the power read
on the multimeter starts to decrease.
f. Press
4)5
twice to select the hundredths digit.
g. Using the Modify knob, increase the angle slowly until the power on
the multimeter starts to decrease. Return to the angle that gave the
maximum power.
8. Connect the DUT into the setup, disturbing the setup as little as possible.
3-6 Scanning the Poincare Sphere
 Loading...
Loading...