

COMBIVERT
00.F4.S0B-K111
D
GB
F
I
E
STOP
0,37...0,75 kW
BETRIEBSANLEITUNG KEB COMBIVERT F4-S
INSTRUCTION MANUAL
MANUEL D'INSTRUCTIONS
MANUALE D'ISTRUZIONE
MANUAL DE INSTRUCCIONES
Erst Betriebsanleitung Teil 1 lesen !
Read Instruction manual part 1 first !
Lisez d'abord le manuel d'instructions partie 1 !
Prima leggere le manuale di istruzione 1 parte !
Leer manual de instrucciones parte 1 antes !
ANTRIEBSTECHNIK
10/98
D
Seite 3............... 24
GB
Page 25 ............. 46
F
Page 47 ............. 68
Diese Betriebsanleitung muß jedem Anwender zugänglich gemacht
werden.Vor jeglichen Arbeiten muß sich der Anwender mit dem Gerät
vertraut machen. Darunter fällt insbesondere die Kenntnis und Beachtung der Sicherheits- und Warnhinweise. Die in dieser Betriebsanleitung verwendeten Pictogramme entsprechen folgender Bedeutung:
Gefahr Achtung, Information
Warnung Unbedingt Hilfe
Vorsicht beachten Tip
This instruction manual must be made available to any user. Before
working with this unit the user must be familiarized with it. This is
especially true for the attention, safety and warning guides. The
meaning of the pictograms used in this manual are:
Danger Attention, Information
Warning observe at Help
Caution all costs Tip
Ce manuel d'instructions doit être rendu accessible à tout utilisateur.
Avant tous travaux, l'utilisateur doit se familiariser d'abord avec le
variateur, notamment tenir compte des mesures de sécurité et des
avertissements. Les pictogrammes utilisés dans ce manuel ont les
significations suivantes:
I
Página 69 ......... 90
I
E
Pagina 91 ......... 112
Danger Attention, Information
Avertissement à respecter Aide
Précaution obligatoirement Astuces
Questo manuale di instruzioni deve essere messo a disposizione di
tutti gli utenti. Prima di impregare questa apparecchiatura. L' utente
deve prima familiarizzare con essa. In particolar modo prestare
attenzione alle sottoindicate direttive di avvertimento e sicurezza
personale nell ' utilizzo dell ' apparecchiatura.
Pericolo Attenzione, Informazione
Avvertimento osservare Aiuto
Cautela assolutamente Suggerimento
Este manual de instrucciones debe ser accesible a todos los usuarios.
Antes de conectar el convertidor, el usuario debe de familiarizarse
con el convertidor, especialmente debe de tener en cuenta las
medias de seguridad y advertencias. Los pictogramas utilizados en
este manual tienen los significados siguientes:
Peligro
Advertencia
Precaución
Atención
de obligado
cumplimiento
Información
Ayuda
Nota
© KEB 00.F4.S0B-K111 10/98
Table of Contents
ANTRIEBSTECHNIK
1. General .......................................................... 26
1.1 Product Description ............................................... 26
1.2 Identifikation of the unit ......................................... 27
2. Power Circuit................................................. 27
2.1 Performance Data................................................... 27
2.2 Dimensions ............................................................. 26
2.3 Installation Instructions ......................................... 26
2.4 Terminals ................................................................. 29
2.5 Connection of the Power Circuit ........................... 29
3. Control circuit ................................................... 30
3.1 Assignment of Terminal Strip X1 ........................... 30
3.2 Connection of the control ...................................... 30
3.2.1
3.2.2
3.2.3
Digital inputs ............................................................
Analog input .............................................................
Outputs .....................................................................
30
30
31
GB
4. Operation of the unit .................................... 31
4.1 Digital operator ....................................................... 31
4.1.1 Interface operator...................................................... 31
4.1.2
4.2 Parameter Summary............................................... 33
4.3 Password Input....................................................... 33
4.4 Operating Display ................................................... 34
4.5 Basic Adjustment of the Drive............................... 35
4.6 Special Adjustments .............................................. 37
4.7 The Drive Mode....................................................... 42
4.7.1
4.7.2
4.7.3
4.7.4
Keyboard ..................................................................
Start / Stop Drive ......................................................
Change Direction of Rotation ...................................
Preset Set Value .......................................................
Leave Drive Mode ....................................................
32
42
42
42
42
5. Error Diagnosis ............................................. 43
6. Index............................................................... 44
7. Password ..................................................... 113
25
General
1. General
1.1 Product Description
GB
In selecting the KEB COMBIVERT you have chosen a frequency inverter
with the highest demands on quality and dynamic.
It exclusively serves for a stepless speed regulation of
the three-phase motor.
The operation of other electrical utilization equipment is
forbidden and can lead to the destruction of the unit.
This instruction manual describes the COMBIVERT F4-S
- 0.37kW / 230V-class
- 0.75kW / 230V-class
Through small dimensions and an optimal price the unit is convincing with
following features:
- operator-friendly interface
- low switching losses due to IGBT power circuit
- short-time overload up to 200%
- extensive protection devices for current, voltage and temperature
- conditional short-circuit and earth-fault-proof
- immunity to interference according to IEC1000
- potential-separated digital inputs
- programmable relay output
- DC-brake
- 3 fixed frequencies
- slip compensation
- auto-boost
- output voltage stabilization
- speed search
- adjustable current limits for acceleration and constant operation
- fast commissioning by way of keyboard (Drive-Mode)
- optional networking via gateway with Interbus-S, CAN and Profibus
26
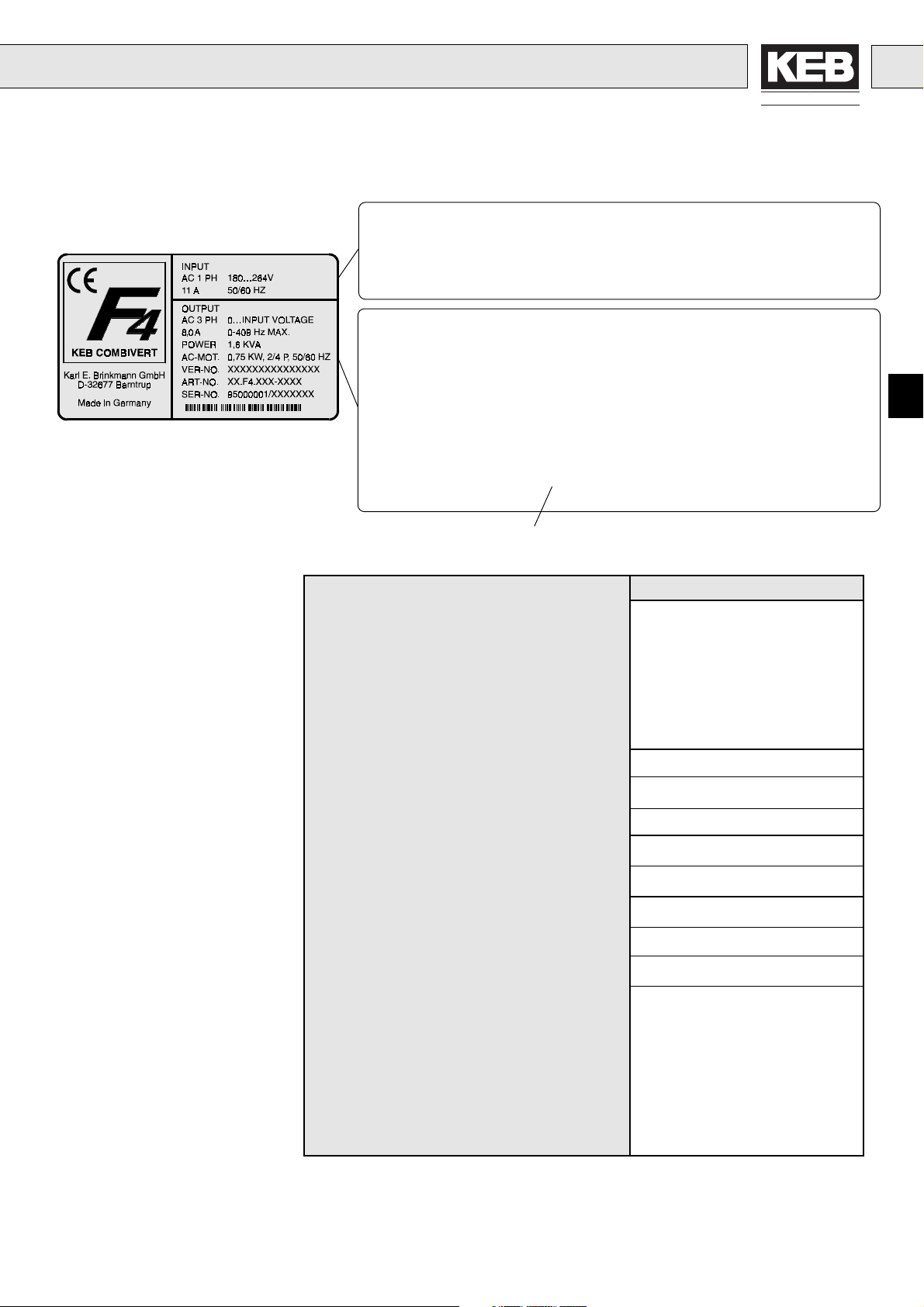
1.2 Identification of the unit
General
ANTRIEBSTECHNIK
Input Specifications:
Input mains perm. mains voltage range
Input current during nominal load mains frequency
Output Specifications:
Output phases Output voltage range
Output current during nominal load Output frequency range
Max. output rated power of the inverter in relation to 230VAC
Recommended nominal data of the motor to be used
COMBIVIS Identification number:
Part number: 07.F4.S0C-1220
Serial number:
GB
2. Power Circuit
2.1 Performance Data
The following performance
data apply to 2/4-pole
standard motors. For other
pole numbers the frequency
inverter must be
dimensioned onto the rated
motor current. With regard
to special-purpose or
medium frequency motors
please contact KEB.
Unit Size
Size 05 07
Nominal power output
1)
[kVA] 0,9 1,6
Peak current ( <30s) [A] 4,6 8,0
Nominal output current [A] 2,3 4,0
Max. rated motor power [kW] 0,37 0,75
Max. switching frequency [kHz] 8 8
Power loss [W] 35 50
Load capacity 30s max. peak current
Mains voltage [V] 180...264 ± 0 %
Network phase 1
Mains frequency [Hz] 50 / 60 ± 2
Output voltage [V] 3 x 0 ... U
Mains
Output frequency [Hz] 0...409,58
Max. permissible mains fuse [A] 10 20
Supply cross section
2)
[mm2] 1,5 2,5
Permissible temp. limit value -25...70°C storage
-10...45°C in operation
Relative humidity max.95% (without precipitation)
Design-/protective system IP20
Noise suppression
3)
EN 50081-1/ 50082-2
Noise immunity IEC 1000 4-2/-3/-4/-5/-6
Emitted interferences EN55011-B / EN 55022-A
1)
In relation to 230V rated voltage
2)
Recommended minimal cross section at rated power and cable length up to 100m (copper).
3)
Only with optional built-in filter und shielded, grounded motor cable on both sides
27
Power Circuit
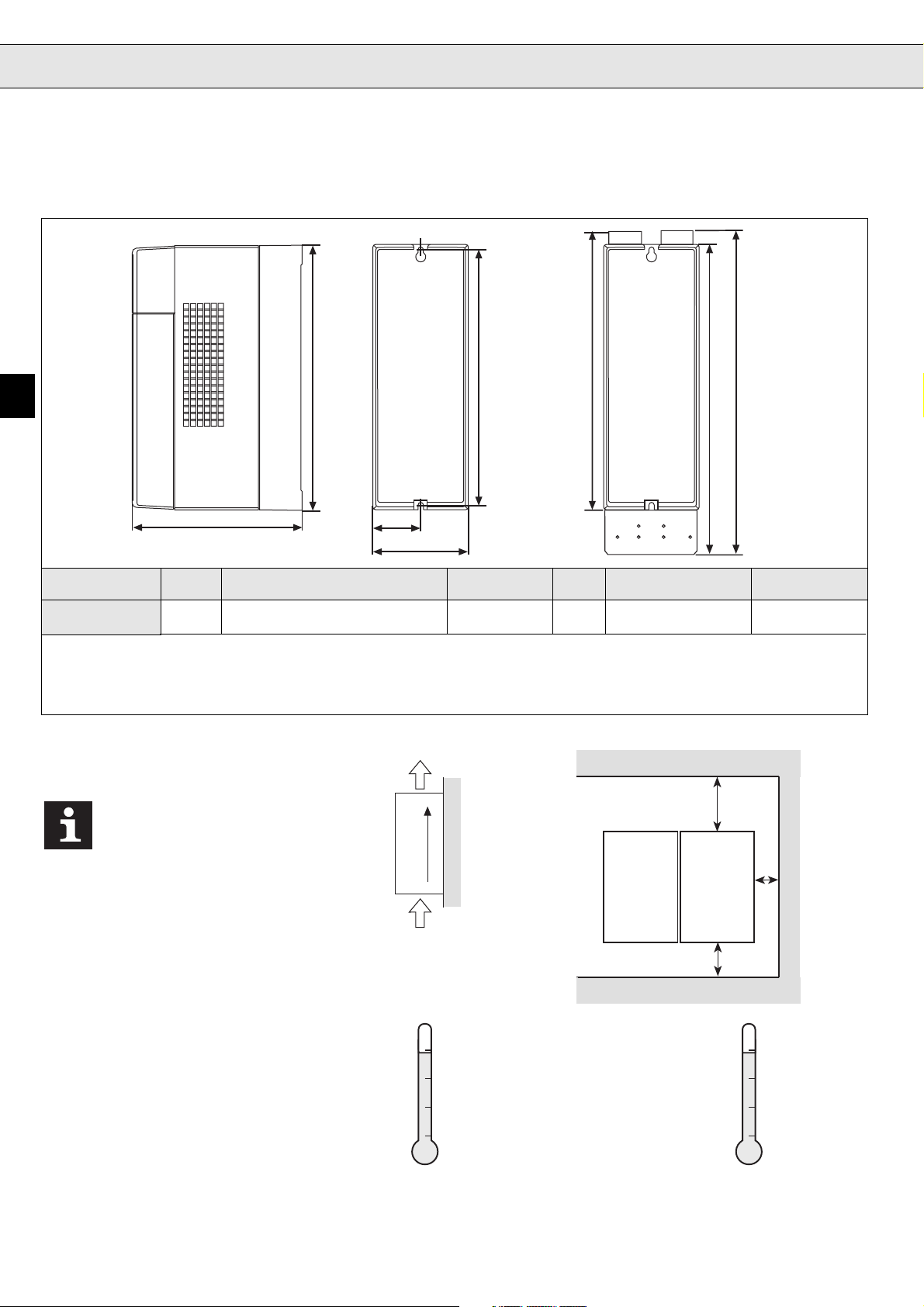
2.2 Dimensions
Ø F
GB
C / C1
Size A B B1 B2 B3 C C1 F G H H1 Weight [kG]
C 90 230 264 260 300 115 165 5 45 220 240 1,5
B1/C1/H1 with submounted filter
B2 with screening plate
B3 with submounted filter and screening plate
2.4 Installation
Instructions
Installation height max.
2000 m. At installation
heights over 1000 m a
power reduction of 1% per 100m
must be taken into consideration.
B
G
A
H
Direction of the cooling fins
Always install vertically!
B2B1 B3
minimum clearance in mm
150
F4 F4
100
30
28
Transport-/
Storage
temperature
max +70°C
min -25°C
Cooling agent inlet
temperature/
ambient temperature
during operation
max +45°C
min -10°C
Power Circuit
ANTRIEBSTECHNIK
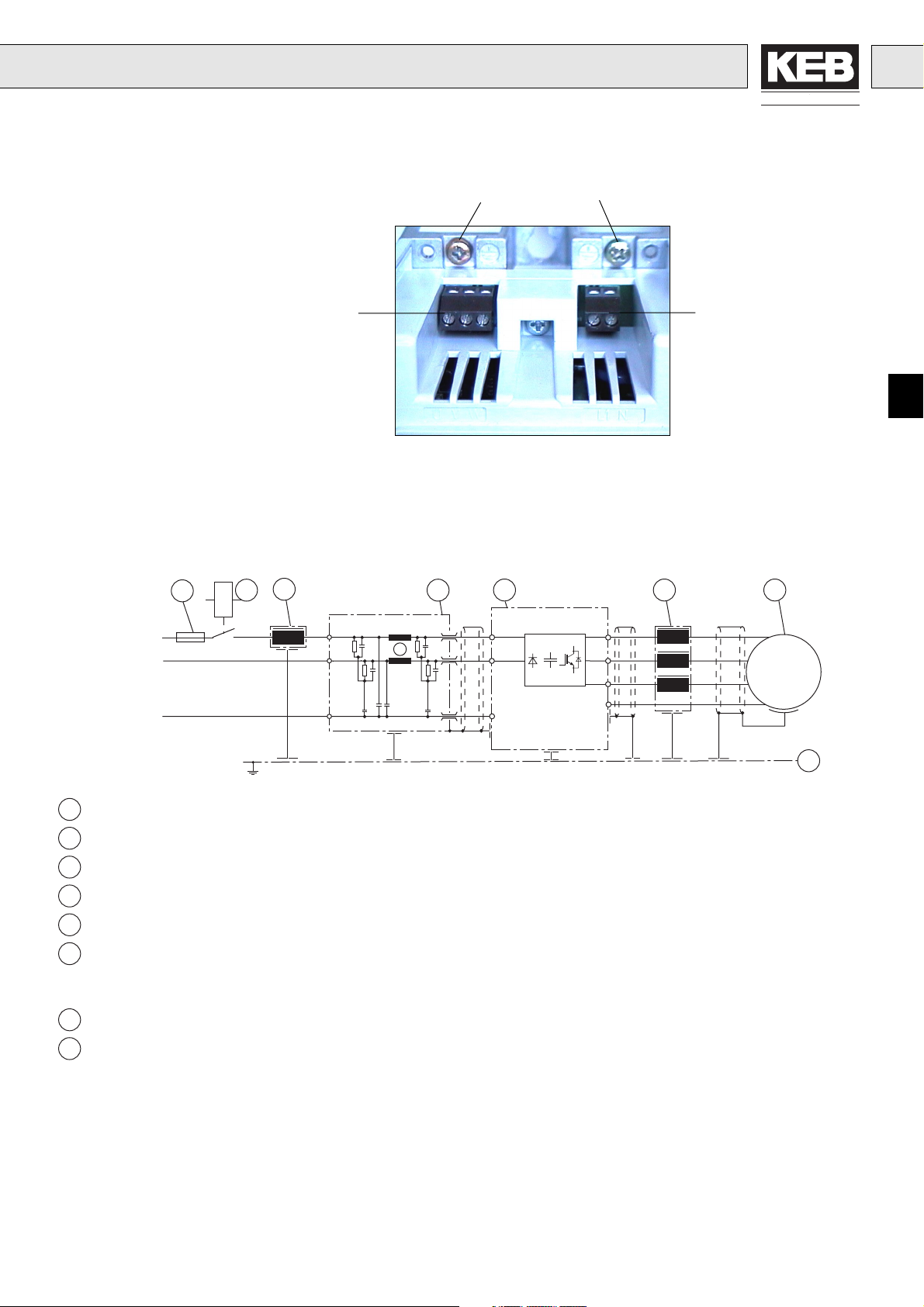
2.3 Terminals
2.5 Connection of the
Power Circuit
1
L1
N
PE
2
Motor
connection
3
L1
N
PE
U V W
4
Earth terminals
Mains
connection
L1 N
5 6 7
L1
N
PE
U
+
V
W
PE
U
V
W
PE
U1
V1
W1
PE
3
GB
M
~
Mains fuse (see „Technical Data“)
1
Mains contactor !!! Generally switch only the phase !!!
2
Input reactor (Part.No. Size 05: 00.90.291-4848 / Size 07: 00.90.291-2948)
3
Interference suppression filter (GEN.No. Size 05: 05.U4.00C-B600 / 07: 07.U4.00C-B600)
4
KEB COMBIVERT F4-S
5
Motor choke (Part.No. Size 05: 00.90.290-4245 / Size 07: 00.90.291-2845)
6
!!! Only use up to 4 KHz switching and 51 Hz output frequency !!!
For other switching or output frequencies ask KEB.
Motor
7
Mounting plate
8
8
29
Installation and Connection
3. Control circuit
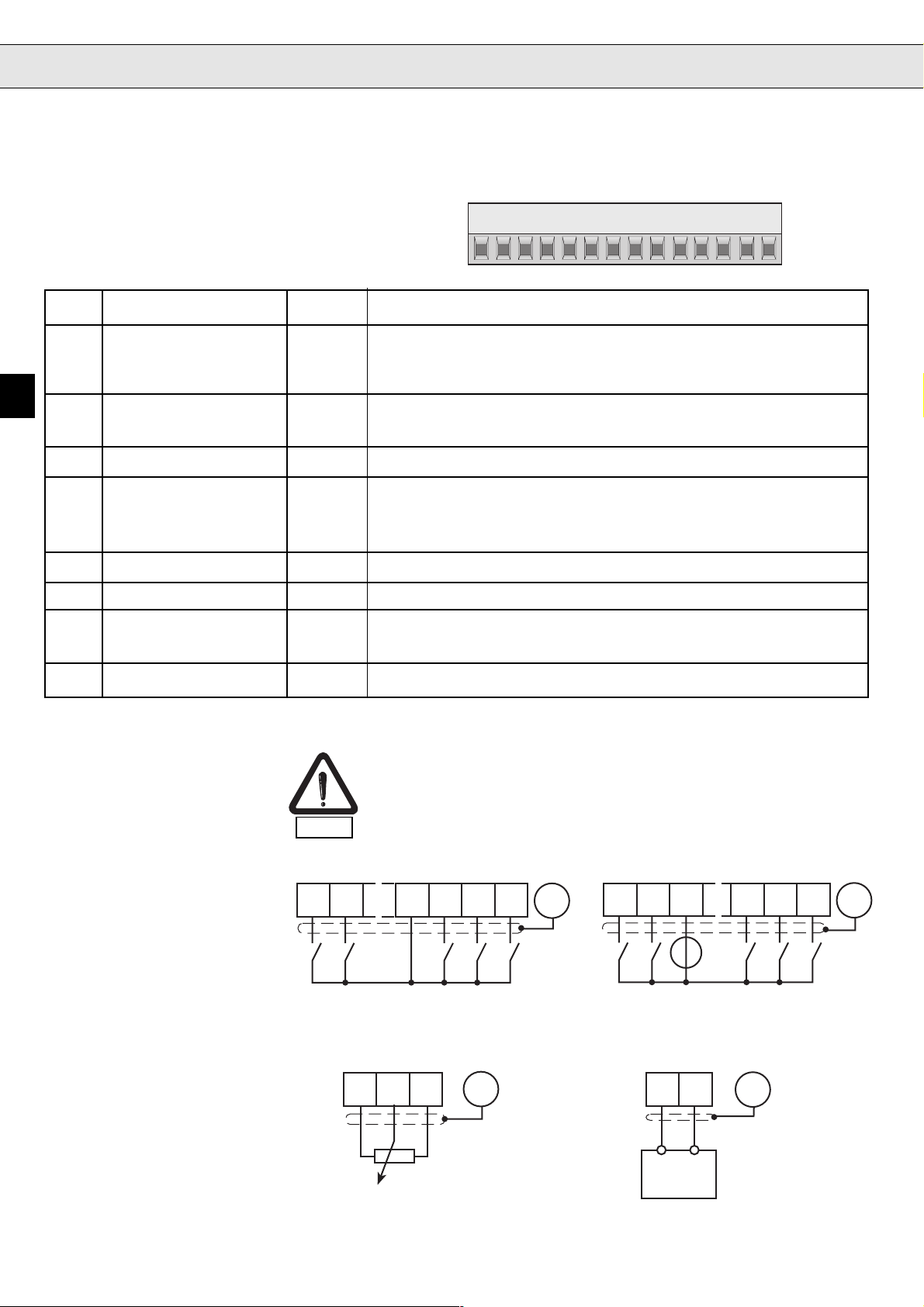
3.1 Assignment of
Terminal Strip X1
PIN Function Name Description
X1.1 NO contact RLA Relay output (30V DC / 1A)
X1.2 NC contact RLB Function see parameter CP.22
GB
X1.3 Main contact RLC ( factory setting: fault indication)
X1.4 Fixed frequency 1 I1 X1.4 + X1.5 = fixed frequency 3
X1.5 Fixed frequency 2 I2 no input = analog set value
X1.6 Digital Ground 0V Zero potential for digital in-/outputs
X1.7 +10V CRF Supply voltage for set value potentiometer (max. 4mA)
X1.8 Set value input REF 0...10VDC for analog set value
X1.9 Common COM Ground for analog in- and outputs
X1.10 Analog output AOUT Analog output of real frequency 0...10VDC = 0...100Hz
X1.11 15V +15V voltage supply for digital in-/outputs (max. 100mA)
X1.12 Reverse R Preset rotation; forward has priority
X1.13 Forward F
123456789101112
13 14
X1.14 Control release ST/RST Power modules are enabled; Reset at opening
3.2 Connection of the
control
In order to prevent a malfunction caused by interference voltage supply on
the control inputs, the following directions should be observed:
- Use shielded/drilled cables
- Lay shield on one side of the inverter onto earth potential
- Lay control and power cable separately (about 10...20 cm apart)
EMCEMC
EMC
3.2.1 Digital input
EMCEMC
InternalInternal
Internal voltage supply
InternalInternal
4 5 11 12 13 14
- Lay crossings in a right angle (in case it cannot be prevented)
ExternalExternal
External voltage supply
ExternalExternal
4 6 12 13 14
PE
5
+
13...30VDC
3.2.2 Analog input
Internal analog set-point
setting 0...10V
789 PE
External analog
set-point setting
89
PE
PE
30
R = 3...10 kΩ
+-
SPS
0...10 DCV
Ri = 56 kΩ
START
STOP
FUNC.
SPEED
ENTER
F/R
3.2.3Outputs
Installation and Connection
ANTRIEBSTECHNIK
4. Operation of the
unit
4.1 Digital operator
Part-No. 00.F4.010-2009
123 910
Relay output:
30V DC / 1A
PE
Analog output:
+
0...10VDC / max. 5mA
at Ri 56 kΩ const.
0...1mADC at
Ri ≤ 5 kΩ const.
As an accessory to the local operation an operator is necessary. To
prevent malfunctions, the inverter must be brought into
nOP
status
before connecting/disconnecting the operator (open control release
terminal X1.14). When starting the inverter without an operator, it is
started with the last stored values or factory setting. The operator is
obtainable in different versions:
5-digit LED Display
Interface control
Transmit "LED flickers"
Operating-/Error display
Normal "LED on"
Error "LED blinks"
GB
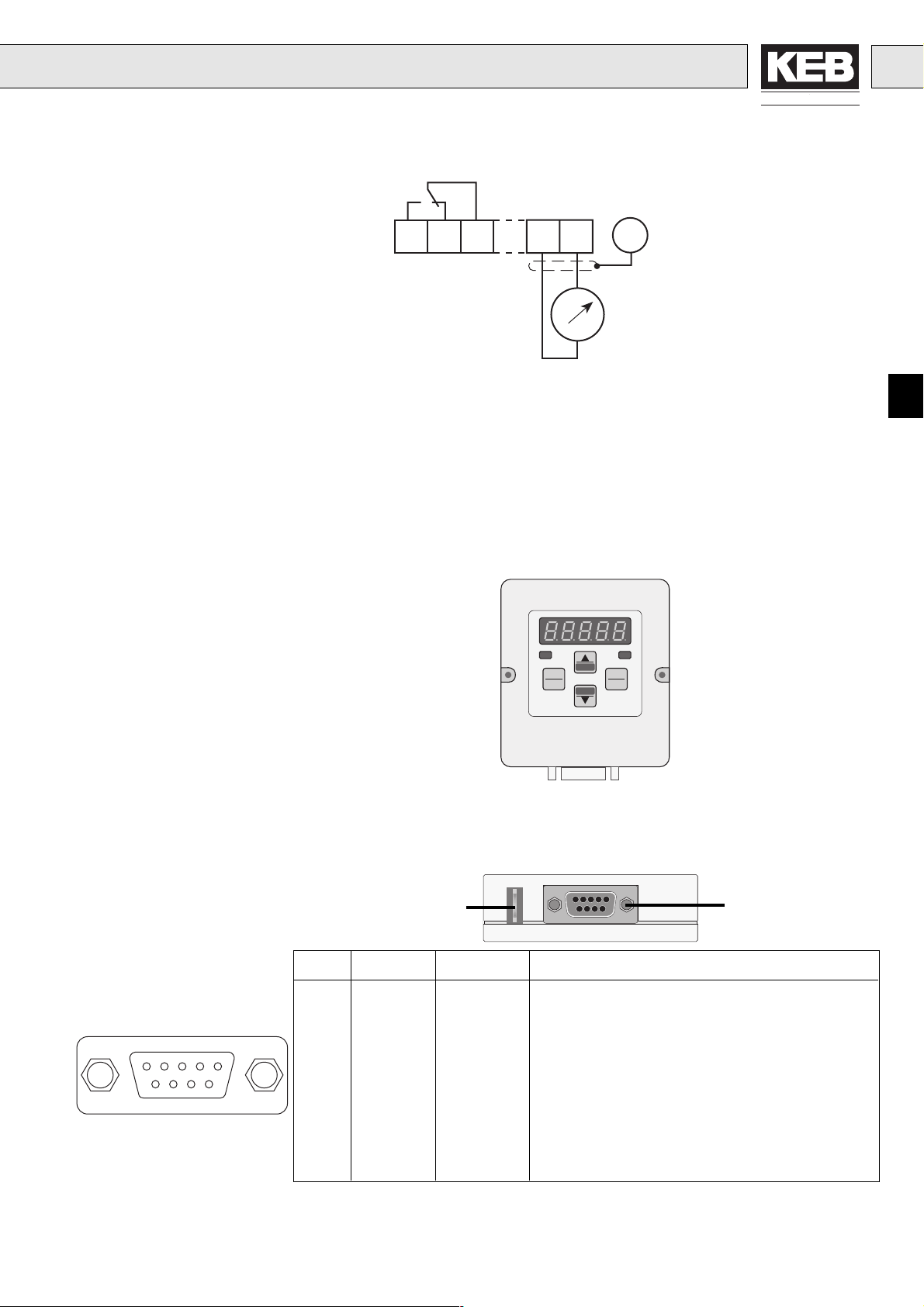
4.1.1 Interface operator
Part-No. 00.F4.010-1009
12345
6789
Double function keyboard
In the Interface operator there is an additional isolated RS232/RS485Interface integrated.
PE-Connection
RS232/RS485
PIN RS485 Signal Meaning
1 –– reserved
2 – TxD Transmitter signal/RS232
3 – RxD Receiver signal/RS232
4 A' RxD-A Receiver signal A/RS485
5 B' RxD-B Receiver signal B/RS485
6 – VP Voltage supply-Plus +5V (I
= 10 mA))
max
7 C/C' DGND Data reference potential
8 A TxD-A Transmitter signal A/RS485
9 B TxD-B Transmitter signal B/RS485
Informations about other versions of operators contact KEB!
31

Operation of the Unit
4.1.2 Keyboard
GB
When switching on KEB COMBIVERT the value of parameter CP.1
appears. (See Drive mode to switch the keyboard function)
The function key (FUNC)
changes between the
parameter value and
FUNC.
SPEED
parameter number.
With UP ( ) and DOWN
( ) the value of the
parameter number is
increased / decreased with
changeable parameters.
START
STOP
START
STOP
Principally during a change, parameter values are immediately accepted
and stored non-volatile. With some parameters it is not useful, that the
adjusted value immediately be accepted. When this type of parameter is
changed, then a point appears behind the last digit.
By pressing ENTER the
adjusted value is
accepted and non-volatile
ENTER
F/R
stored.
If a malfunction occurs during operation, then the actual display is
overwritten by the alarm message. The alarm message in the display is
reset by ENTER.
error
ENTER
F/R
With ENTER the error message is only reset in the display. In
order to reset an error oneself, the cause must be removed
and a reset on terminal X1.14 or a power-on reset must occur.
In the Inverter status display (CP. 2) the error is still displayed.
32

4.2 Parameter Summary
Operation of the Unit
ANTRIEBSTECHNIK
Display Parameter Adjust. range Resolution
Factory setting
CP. 0 Password input 0...9999 1 CP. 1 Actual frequency display - 0,1 Hz CP. 2 Inverter status display - - CP. 3 Actual load - 1 % CP. 4 Peak load - 1 % CP. 5 Rated frequency 0...409.58 Hz 0.0125 Hz 50.0 Hz
CP. 6 Boost 0...25.5 % 0.1 % 2 %
CP. 7 Acceleration time 0.01...300 s 0.01 s 10 s
CP. 8 Deceleration time 0.01...300 s 0.01 s 10 s
CP. 9 Minimal frequency 0...409.58 Hz 0.0125 Hz 0 Hz
CP.10 Maximal frequency 0...409.58 Hz 0.0125 Hz 70 Hz
CP.11 Fixed frequency 1 ±0...409.58 Hz 0.0125 Hz 5 Hz
CP.12 Fixed frequency 2 ±0...409.58 Hz 0.0125 Hz 50 Hz
CP.13 Fixed frequency 3 ±0...409.58 Hz 0.0125 Hz 70 Hz
CP.14 Max. ramp current 10...200 % 1 % 140 %
CP.15 Max. constant current 10...200 % 1 % 200 %
CP.16 Speed search 0...7 1 0
CP.17 Voltage stabilization 150...649 V,oFF 1 V oFF
CP.18 Slip compensation -2.50...2.50 0.01 0=oFF
CP.19 Autoboost -2.50...2.50 0.01 0=oFF
CP.20 DC-braking 0...9 1 0
CP.21 Braking time 0...100 s 0.01 s 10 s
CP.22 Relay output 0...25 (0...24)
1)
12
CP.23 Frequency level 0...409.58 Hz 0.0125 Hz 4 Hz
GB
1)
Value 0...24 is valid as of software version 1.1
4.3 Password Input Ex works the frequency inverter is supplied without password protection,
this means that all changeable parameters can be adjusted. After
parameterizing the unit can be barred against unauthorized access. The
adjusted mode is stored.
ENTER
Locking the
Password
CP-Parameter
UP
FUNC
ENTER
Releasing the
Password
CP-Parameter
UP
FUNC
33

Operation of the Unit
4.4 Operating Display
Actual frequency display
GB
Inverter status display
The 4 parameters below serve to control the frequency inverter during
operation.
Display of the actual output frequency with a resolution of 0.0125 Hz. The
rotation of the inverter is indicated by the sign.
Output frequency 18.3 Hz, rotation forward
Examples:
Output frequency 18.3 Hz, rotation reverse
The status display shows the actual working conditions of the inverter.
Possible displays and their meanings are:
" no Operation " control release (terminal X1.14) not
bridged, modulation switched off, output voltage = 0 V,
drive is not controlled.
" Low Speed " no rotation preset ( terminal X1.12 or
X1.13), modulation switched off, output voltage = 0 V,
drive is not controlled.
" Forward Acceleration " drive accelerates with a forward
direction of rotation.
Actual load
Peak load
" Forward Deceleration " drive decelerates with a forward
direction of rotation.
" Reverse Acceleration " drives accelerates with a reverse
direction of rotation.
" Reverse Deceleration " drive decelerates with a reverse
direction of rotation.
" Forward Constant " drive runs with a constant speed
and a forward direction of rotation.
" Reverse Constant " drive runs with constant speed and
a reverse direction of rotation.
Other status messages are described at the parameters, which they cause.
Display of the actual inverter rate of utilization in percent. 100% rate of
utilization is equal to the inverter rated current. Only positive values are
displayed, meaning there is no differentiation between motor and
regenerative operation.
This display makes it possible to recognize short-term fluctuations of the
rate of utilization by storing the highest value that occurred. The display
occurs in percent (100% = inverter rated current).
34
With the UP or DOWN key the peak value can be reset when the
unit is on. Switching off the unit deletes the peak value.

Operation of the Unit
ANTRIEBSTECHNIK
4.5 Basic Adjustment
of the Drive
Rated frequency
Boost
The following parameters determine the fundamental operating data of
the drive. They should be checked and/or adapted to the application.
With the adjusted frequency here the inverter reaches a maximal output
voltage. The adjustment of the motor rated frequency is typical here.
Note: Motors can overheat when the rated frequency is incorrectly
adjusted!
U
A
Adjustment range: 0...409.58 Hz
Resolution: 0.0125 Hz
100%
Factory setting: 50.0 Hz
Customer adjustment: _______ Hz
CP. 5
f
In the lower speed range a large part of the motor voltage decreases on
the stator resistance. In order that the breakdown torque of the motor
remains almost constant in the entire speed range, the voltage decrease
can be compensated by the boost.
U
A
Adjustment range: 0...25.5 %
Resolution: 0.1 %
Factory setting: 2.0 %
Customer adjustment: _______ %
CP. 6
CP. 5
f
Adjustment: - Determine the rate of utilization in no-load operation during
rated frequency
- Preset about 10 Hz and adjust the boost, so that about the
same rate of utilization is reached as with the rated frequency.
When the motor, during continuous operation, drives with low
speed and too high voltage it can lead to an overheating of the
motor.
GB
Acceleration time
The parameter determines the time needed, in order to accelerate from
0 to 100 Hz. The actual acceleration time is proportional to the frequency
change.
CP. 7 x delta f
actual acceleration time =
100 Hz
Adjustment range: 0.01...300 s
f
100 Hz
Resolution: 0.01 s
Factory setting: 10 s
Customer adjustment: _______ s
CP. 7
t
Example: CP. 7 = 10 s ; the drive should accelerate from 10 Hz to 60 Hz
delta f = 60 Hz - 10 Hz = 50 Hz
actual acceleration time = (50 Hz / 100 Hz) x 10s = 5 s
35

Operation of the Unit
GB
Deceleration time
Minimal frequency
The parameter determines the time needed in order to decelerate from 100
to 0 Hz. The actual deceleration time is proportional to the frequency change.
CP. 8 x delta f
actual acceleration time =
100 Hz
Adjustment range: 0.01...300 s
Resolution: 0.01 s
f
100 Hz
Factory setting: 10 s
Customer adjustment: _______ s
CP. 8
t
Example: CP. 8 = 10 s ; the drive should decelerate from 60 Hz to 10 Hz
delta f = 60 Hz - 10 Hz = 50 Hz
actual deceleration time = (50 Hz / 100 Hz) x 10s = 5 s
Frequency on which the inverter runs without presetting an analog set
value. Internal limiting of the fixed frequencies CP.11…CP.13.
f
Adjustment range: 0.0...409.58 Hz
Resolution: 0.0125 Hz
CP.10
Factory setting: 0.0 Hz
Customer adjustment: _______ Hz
CP. 9
U
10 V0 V
REF
Maximal frequency
Fixed frequency 1...3
terminal X1.4
terminal X1.5
terminals X1.4+X1.5
Frequency on which the inverter runs with maximum analog set value.
Internal limiting of the fixed frequencies CP.11…CP.13.
Adjustment range: 0.0...409.58 Hz
Resolution: 0.0125 Hz
Factory setting: 70 Hz
Customer adjustment: _______ Hz
Three fixed frequencies can be adjusted. The selection of the fixed
frequencies occurs with the terminals X1.4 and X1.5.
Adjustment range:0.0...±409.58 Hz
Resolution: 0.0125 Hz
Factory setting: 5/50/70 Hz
Customer adjustment 1:______ Hz
Customer adjustment 2:______ Hz
Customer adjustment 3:______ Hz
If presetting occurs outside of the fixed limits of CP.9 and CP.10, then the
frequency is internally limited.
36

Operation of the Unit
ANTRIEBSTECHNIK
4.6 Special
Adjustments
Max. ramp current
Max. constant current
The following parameters serve to optimize the drive and adaption onto
certain applications. These adjustments can be ignored at the initial startup.
This function protects the frequency inverter against switching off by
overcurrent during the acceleration ramp. When the ramp reaches the
adjusted value here, then it is stopped as long as the current decreases
again. CP.2 displays "LAS" at active function.
Adjustment range:10...200%, 200% = oFF
Resolution: 1 %
Factory setting: 140 %
Customer adjustment: _______ %
This function protects the frequency inverter against switching off due to
overcurrent during constant output frequency. When exceeding the
adjusted value here, the output frequency is reduced until the value drops
below the adjusted value. CP. 2 displays "SSL" at active function.
GB
CP.14
CP.15
on
off
on
f
Adjustment range:10...200%, 200% = oFF
Resolution: 1 %
Factory Setting: 200 %
Customer adjustment: _______ %
off
f
real
set
t
LAD-stop
t
Current limit
t
t
37

Operation of the Unit
GB
Speed search
Voltage stabilization
When connecting the frequency inverter onto a decelerating motor, an
error can be triggered by the differing rotating field frequencies. At
activated speed search the inverter searches the actual motor speed,
adapts its output frequency and accelerates with the adjusted ramp onto
the given set value. During speed search CP.2 displays "SSF". The
parameter determines, under what conditions the functions operate. With
several conditions the sum of the value must be entered.
Example: CP.16 = 5 means at control releas and after reset
Adjustment range: 0...7 Value Condtion
Resolution: 1 0 function off
Factory setting: 0 1 at control release
Customer adjustment: _______ 2 at switch on
4 after reset
This parameter can adjust a regulated output voltage in relation to the
rated frequency. Because of this voltage variations at the input as well as
in the intermediate circuit only have a small influence on the output voltage
(U/f-characteristic). The function allows, among other things, an adaption
of the output voltage onto the special motors. In the example below the
output voltage is stabilized onto 230 V (0% boost).
Adjustment range:150...649 V, oFF
Resolution: 1 V
Factory setting: oFF
Customer adjustment: _______ V
U
N/UA
250 V
CP.17 = 230 V
190 V
CP.5 = 50 Hz
UA at UN = 250V unstabilized
UA at UN = 250V stabilized
UA at UN = 190V stabilized
UA at UN = 190V unstabilized
UN = mains voltage
UA= output voltage
f
38

Operation of the Unit
ANTRIEBSTECHNIK
Slip compensation
Autoboost
Slip compensation balances the speed changes caused by the load
variation. In order to activate the function, set the value at 1.00 and
optimize as directed in the examples below.
Adjustment range: -2.50...2.50
Resolution: 0.01
Factory setting: 0.00 (= oFF)
Customer adjustment: _______
GB
Autoboost causes an automatic I*R-compensation by raising the output
voltage during high load torques. The magnetizing current remains
constant. To activate the function set the value to 1.00 and optimize as
directed in the examples below. Check the motor voltage to see, whether
it returned to the normal value after no load of the drive. Otherwise reduce
CP.19.
Adjustment range: -2.50...2.50
Resolution: 0.01
Factory setting: 0.00 (= oFF)
Customer adjustment: _______
Slip compensation and autoboost work on the basis of preset
motor data. When using a special motor or in case of
overdimensioning of more than one size, then both functions
should be deactivated.
M
1
23
n
1) good - speed remains stable at increasing torque
2) bad - speed decreases with increasing torque
3) bad - speed is increased too much at load
CP.18
CP.19
CP.19
CP.18
OK !
f/n
real
=
=
=
=
load
f
n
real
f
n
real
f
n
real
f
n
real
39

Operation of the Unit
GB
DC-braking
With DC-braking the motor is not decelerated by the ramp. Quick braking
is caused by DC voltage, which is applied onto the motor winding. This
parameter determines how the DC-braking is triggered.
Value Activation
0 DC-braking deactivated
1 DC-braking at switch off of the direction of rotation and in
reaching 0Hz. Braking time is dependent on CP.21 or until
the next direction of rotation presetting.
2 DC-braking as soon as the direction of rotation presetting
is absent. Braking time dependent on the real frequency
3 DC-braking, as soon as the direction of rotation changes.
Braking time dependent on the real frequency.
4 DC-braking at switch off of the direction of rotation and the
real frequency goes below 4 Hz.
5 DC-braking, when the real frequency goes below 4 Hz.
6 DC-braking, as soon as the set value goes below 4 Hz.
7 DC-braking deactivated
8 DC-braking deactivated
9 DC-braking after switching on the modulation on. Braking
time is dependent on CP.21.
Braking time
Factory setting: 0
Note: Enter-Parameter
Customer adjustment: _______
The braking time is evaluated depending on CP.20 as follow:
- entered time = braking time
- entered time relates to 100 Hz and decreases/increases
proportionally to the real frequency.
f
100 Hz
Adjustment range: 0.00...100 s
Resolution: 0.01 s
f
f
ist
real
Factory setting: 10 s
Customer adjustment: _______
t
t
B
Breal
ist
Calculation of the braking time:
CP.21* f
=
t
B
real
real
100 Hz
CP.21
t
40

Operation of the Unit
ANTRIEBSTECHNIK
Relay output
Relay output (terminal X1.1...X1.3) is adjusted in the factory as a fault
relay. This parameter can adjust the function of the output onto any
function listed in the table below.
Value Function
0 No function
1 Generally on
2 Fault relay
3 No function
4 Overload alert signal (10s before switch off)
5 * Overtemperature alert signal inverter
6 * Overtemperature alert signal motor (10s before switch off)
7 No function
8 Max. constant current (stall, CP.15) exceeded
9 Max. LA-/LD-Stop (CP.14) exceeded
10 DC-braking active
11 No function
12 Rate of utilization (CP.3) > 100%
13 No function
14 Actual value=set value (CP.2 = Fcon, rcon; not at noP, LS, error, SSF)
15 Accelerate (CP.2 = FAcc, rAcc, LAS)
16 Decelerate (CP.2 = FdEc, rdEc, LdS)
17 Right handed rotation (not at noP, LS error)
18 Left handed rotation (not at noP, LS error)
19 Real direction of rotation = set direction of rotation
20 Real value > frequency level CP.23
21 Set value > freqeuncy level CP.23
22 No function
23 Operating signal (after initialization as long as no error is active)
24 Run signal
25 No function (not available since software version 1.1)
GB
Frequency level
Factory setting: 2
Note: Enter-Parameter
* available as of software
version 1.1
Customer adjustment: _______
This parameter determines the switching point for the relay output
X1.1...X1.3 at CP.22 = "20” or “21”
After the switching of the relay, the frequency can move within a 0.5 Hz
window, without the relay dropping off.
Adjustment range: 0.0...409.58 Hz
Resolution: 0.0125 Hz
Factory setting: 4 Hz
Customer adjustment: _______
41

Drive mode
4.7 The Drive Mode The drive mode is a operating mode of KEB COMBIVERT to start the
drive manually by the operator. After switching the control release the set
value and rotation presetting is done exclusively by the keyboard. In order
to activate the drive mode the corresponding password in CP.0 must be
entered. The display switches over as follows.
Direction of rotation
F=forward / r=reverse
noP = no control release /
LS = neutral position
Status
4.7.1 Start / Stop Drive
GB
4.7.2Change Direction
of Rotation
4.7.3 Preset Set Value
Modulation blocked
Drive not controlled
START
Drive accelerates onto
the adjusted set value
ENTER
F/R
FUNC.
SPEED
Drive decreases to 0 Hz and
switches the modulation off
STOP
Drive operates with
adjusted set value
Drive changes direction
of rotation
Display changes when key is
pressed to set value display/
presetting
4.7.4 Leave Drive Mode
42
STOP
START
Set value can be changed
with UP/DOWN at pressed
FUNC/SPEED key
To exit the drive mode the inverter must be in status “stop” (Display noP
or LS). Press the FUNC and ENTER keys simultaneously for about 3
seconds in order to leave the drive mode. The CP-parameters appear in
the display.
FUNC.
SPEED
+
ENTER
F/R
for 3 seconds

Error Diagnosis
ANTRIEBSTECHNIK
5. Error Diagnosis
Undervoltage
Overvoltage
Overcurrent
Overload
Error messages are represented with an "E. " and the corresponding
error in the display of the KEB COMBIVERT. The displays and their
causes are described below.
Occurs, when the intermediate ciruict voltage falls below the permissible value.
Possible causes are - input voltage too low or unstable
- inverter power too small
- voltage loss due to incorrect cabling
- power supply by generator/transformer breaks down,
because ramps are too short
GB
Occurs, when the intermediate circuit voltage rises above over the
permissible value.
Possible causes are - input voltage too high
- disturbance voltages at the input
- delay ramps too short
Occurs, when exceeding the peak current or at ground fault.
Occurs when a too high load is applied for more than the allowed time
(see "Performance Data"). Possible causes for this are
- error or overload in the application
- inverter incorrectly dimensioned
- motor incorrectly wired
Cooling down phase
completed
Overheat
no Overheat
Current limit resistor error
After error E. OL you must wait for a cooling down time. This message
appears after the cooling down phase is completed. The error can be
reset.
Occurs, when the heat sink temperature > 85°C. Possible causes for this
are - insufficient cooling
- surrounding temperature too high
Internal or external excess-temperature error do not occur anymore.
Error "E. OH" can be reset.
Current limit resistor not bridged, occurs for a short time during the turn on
phase and is reset immediately. If the erorr message remains the following
may be the cause - incorrect or input voltage too small
- high loss in the supply line
43

Indice
7. Index
A
Acceleration time 33, 35, 45
Actual frequency display 33, 34, 45
Actual load 33, 34, 45
Analog inputs 30
Analog output 30
Autoboost 33, 39, 45
B
GB
Basic Adjustment 35
Boost 33, 35, 45
Braking time 33, 45
C
Change Direction 42
Common 30
Control circuit Version S 30
Control release 30
Cooling down phase 43
Current limit 37
current limit 37
Current limit resistor error 43
D
DC-braking 33, 40, 45
Decceleration time 36
Deceleration time 33, 45
Digital inputs 30
Digital Mass 30
Drive Mode 42
E
Error Diagnosis 43
Error messages 43
F
Fixed frequency 30, 33, 36, 45
Forward 30
Frequency value 33, 41, 45
I
LED 31
load variation 39
M
Max. constant current 33, 37, 45
Max. ramp current 33, 37, 45
Maximal frequency 33, 36, 45
Minimal frequency 33, 36, 45
modulation 34
Modulation blocked 42
Motor data 39
N
no Overheat 43
O
Operating Display 34
optimize 39
Overcurrent 43
Overheat 43
Overload 43
Overvoltage 43
P
Password input 33, 45
Peak load 33, 34, 45
peak value 34
R
Rated frequency 33, 35, 45
Relay output 30, 33, 41, 45
Releasing 33
RS232/485 31
S
Set value input 30
Slip compensation 33, 39, 45
Special Adjustments 37
Speed search 33, 38, 45
Start / Stop 42
U
Undervoltage 43
I*R-compensation 39
Interface operator 31
interference voltage supply 30
Inverter status display 33, 34, 45
K
Keyboard 31, 32
L
LAD-stop 37
44
V
Voltage stabilization 33, 38, 45
X
X1 30

Quick referenz
ANTRIEBSTECHNIK
Display Parameter Adjust. range Resolution
Customer setting
CP. 0 Password input 0...9999 1 CP. 1 Actual frequency display - 0,1 Hz CP. 2 Inverter status display - - CP. 3 Actual load - 1 % CP. 4 Peak load - 1 % CP. 5 Rated frequency 0...409.58 Hz 0.0125 Hz ____________
CP. 6 Boost 0...25.5 % 0.1 % ____________
CP. 7 Acceleration time 0.01...300 s 0.01 s ____________
CP. 8 Deceleration time 0.01...300 s 0.01 s ____________
CP. 9 Minimal frequency 0...409.58 Hz 0.0125 Hz ____________
CP.10 Maximal frequency 0...409.58 Hz 0.0125 Hz ____________
CP.11 Fixed frequency 1 0...±409.58 Hz 0.0125 Hz ____________
CP.12 Fixed frequency 2 0...±409.58 Hz 0.0125 Hz ____________
CP.13 Fixed frequency 3 0...±409.58 Hz 0.0125 Hz ____________
CP.14 Max. ramp current 10...200 % 1 % ____________
CP.15 Max. constant current 10...200 % 1 % ____________
CP.16 Speed search 0...7 1 ____________
CP.17 Voltage stabilization 150...649 V,oFF 1 V ____________
CP.18 Slip compensation -2.50...2.50 0.01 ____________
CP.19 Autoboost -2.50...2.50 0.01 ____________
CP.20 DC-braking 0...9 1 ____________
CP.21 Braking time 0...100 s 0.01 s ____________
CP.22 Relay output 0...25 (0...24)
1)
1 ____________
CP.23 Frequency level 0...409.58 Hz 0.0125 Hz ____________
GB
1)
Value 0...24 is valid as of software version 1.1
The function key (FUNC) changes between the
parameter value and parameter number.
With UP ( ) and DOWN ( ) the value of the parameter
number is increased/decreased with changeable
parameters.
Password input:
Locking the
CP-Parameter
Password
○○○○○○○○
FUNC
ENTER
UP
Releasing the
CP-Parameter
START
STOP
Password
○○○○○○○
FUNC
FUNC.
SPEED
STOP
START
ENTER
UP
45

GB
46

ANTRIEBSTECHNIK
7. Password
a) CP-Parameter "read only"
b) CP-Parameter "read/write"
ENTER
Password
UP
FUNC
ENTER
Password
UP
FUNC
c) Drive mode activ
✂
FUNC
ENTER
Password
UP
X X
a)
100
b)
200
c)
500
113

114

ANTRIEBSTECHNIK
D
Vor Auslieferung durchlaufen alle Produkte mehrfach eine Qualitäts- und Funktionskontrolle, so
daß Fehler auszuschließen sind. Bei Beachtung unserer Betriebsanleitung sind keine Störungen zu
erwarten. Sollte sich trotzdem ein Grund zur Reklamation ergeben, so ist das Gerät mit Angabe der
Rechnungsnummer, des Lieferdatums, der Fehlerursache und der Einsatzbedingungen an uns
zurückzusenden. Für Fehler, die aufgrund falscher Behandlung, falscher Lagerung oder sonstigen
allgemeinen Irrtümern auftreten, übernehmen wir keine Verantwortung. Prospekte, Kataloge und
Angebote enthalten nur Richtwerte. Technische Änderungen jeder Art behalten wir uns vor. Alle Rechte
vorbehalten. Nachdruck, Vervielfältigung und fotomechanische Wiedergabe sind ohne schriftliche
Genehmigung durch KEB auch auszugsweise verboten.
GB
Prior to delivery all products pass several quality and performance inspections so that malfunctions
can be ruled out. When used in accordance with the operating instructions failure is most unlikely.
However, if you have cause for complaint the unit should be returned stating invoice number, delivery
date, cause of failure and field conditions. We do not accept the responsibility for failures due to misuse,
wrong storage or similar causes. Leaflets, catalogues and quotations contain only standard values. We
reserve the right to make technical changes without obligation. All rights reserved. Any piratic printing,
mimeograhing or photomechanical reproduction, even in extracts, is strictly prohibited.
F
Avant la livraison tous les produits passent par différents contrôles fonctionnels et qualitatifs de
manière à éliminer les mauvais fonctionnements. L'apparition de défauts sur ces produits est très
improbable s'ils sont raccordés et utilisés selon les recommandations des manuels d'instructions.
Néanmoins, si un défaut apparaissait, le matériel doit être retourné en indiquant le numéro du bon de
livraison, la date d'expédition et les détails apparents du défaut ainsi que le type d'application. Un
mauvais emploi, de mauvaises conditions de stockage ou d'autres causes de ce type excluent notre
responsabilité en cas de défectuosité. Les documents techniques et commerciaux, les offres de prix
ne contiennent que des valeurs standards. Nous nous réservons le droit de procéder à des
modifications techniques sans préavis. Tout droit réservé. Toutes contrefaçons imprimées, ou
reproductions photomécaniques; même partielles, sont strictement interdites.
I
Prima di essere spediti, tutti i nostri prodotti sono soggetti a severi controlli di qualità e
funzionamento, questo al fine di evitare malfunzionamenti. Se utilizzati seguendo il manuale di
istruzione si evita qualsiasi malfunzionamento. Comunque, qualora dovesse verificarsi un guasto,
l'unità dovrà essere rispedita specificando il numero di bolla, la data di spedizione, i dettagli del guasto
ed il tipo di applicazione. Non si assumono responsabilità per errori dovuti a manomissioni, cattivo
stoccaggio o simili. Ci riserviamo di effettuare qualsiasi modifica senza preavviso alcuno. Tutti i diritti
sono riservati. Qualsiasi riproduzione non autorizzata, anche parziale, è rigorosamente proibita.
I
E
Antes de la expedición, todos nuestros productos han sido sometidos a severos controles de
calidad y funcionamiento, con la finalidad de evitar funcionamientos defectuosos. La posibilidad de
defectos es casi improable utilizando estos productos de acuerdo con el manual de instrucciones. Sin
embargo, si sé detectase algún defecto, la unidad deberá ser devuelta indicando número de
expedición, fecha de envio, causa del fallo y condiciones de instalación. No sé aceptarán
responsabilidades debidas a un mal uso, almacenaje defectuoso o causas similares. Los documentos
ténicos y comerciales indican sólo valores estándar. Nos reservamos el derecho de efectuar
modificaciones técnicas sin previo aviso. Todos los derechos reservados. Cualquier reproducción
parcial o total, no autorizada, está totalmente prohibida.
115

116

ANTRIEBSTECHNIK

Karl E. Brinkmann GmbH
Försterweg 36 - 38 • D - 32683 Barntrup
Telefon 00 49 / 52 63 / 4 01 - 0 • Fax 00 49 / 52 63 / 4 01 - 1 16
Internet: www.keb.de • E-mail: info@keb.de
KEB Antriebstechnik GmbH & Co. KG
Telefon 0049 / 37 72 / 67 - 0 • Telefax 0049 / 37 72 /67 - 2 81
Tel.: 0043 / 7243 / 53586 - 0 • FAX: 0043 / 7243 / 53586 - 21
Wildbacher Str. 5 • D - 08289 Schneeberg
E-mail: info@keb-combidrive.de
KEB Antriebstechnik Austria GmbH
Ritzstraße 8 • A - 4614 Marchtrenk
E-mail: info@keb.at
Herenveld 2 • B - 9500 Geraadsbergen
Tel.: 0032 / 5443 / 878 • FAX: 0032 / 5443 / 7898
Xianxia Road 299 • CHN - 200051 Shanghai
Tel.: 0086 / 21 / 62350922 • FAX: 0086 / 21 / 62350015
Z.I. de la Croix St. Nicolas • 14, rue Gustave Eiffel
Tél.: 0033 / 1 / 49620101 • FAX: 0033 / 1 / 45767495
6 Chieftain Buisiness Park, Morris Close
Park Farm, Wellingborough, GB - Northants, NN8 6 XF
Tel.: 0044 / 1933 / 402220 • FAX: 0044 / 1933 / 400724
Internet: www.keb-uk.co.uk • E-mail: info@keb-uk.co.uk
Via Newton, 2 • I - 20019 Settimo Milanese (Milano)
Tel.: 0039 / 02 / 33500782 • FAX: 0039 / 02 / 33500790
Internet: www.keb.it • E-mail: kebitalia@keb.it
Tel.: 0081 / 233 / 29 / 2800 • FAX: 0081 / 233 / 29 / 2802
KEB Antriebstechnik
E-mail: info@keb.de
KEB China
E-mail: cn_keb@sina.com
Société Française KEB
F - 94510 LA QUEUE EN BRIE
E-mail: sfkeb.2@wanadoo.fr
KEB (UK) Ltd.
KEB Italia S.r.l.
KEB - YAMAKYU Ltd.
711 Fukudayama, Fukuda
J - Shinjo-Shi, Yamagata (996-0053)
E-mail: kebjs001@d4.dion.ne.jp
1F, No.19-5, Shi Chou Rd., Tounan Town
KEB Taiwan Co., Ltd.
R.O.C. - Yin-Lin Hsian / Taiwan
Tel.: 00886 / 5 / 5964242 • FAX: 00886 / 5 / 5964240
E-mail: keb_taiwan@mail.apol.com.tw
KEBCO Inc.
1335 Mendota Heights Road
USA - Mendota Heights, MN 55120
Tel.: 001 / 651 / 4546162 • FAX: 001 / 651 / 4546198
Internet: www.kebco.com • E-mail: info@kebco.com
© KEB 00.F4.S0B-K111 03/2001
 Loading...
Loading...