

Kanardia Nesis III User Manual

Nesis III
Manual del usuario
© Kanardia d.o.o.
Enero 2015
Versión de software NESIS 2.10.02
Información de Contacto Tradución y Adaptación
Editor y productor: FlyTech Lda.
Kanardia d.o.o.
Ulica heroja Rojška 70 www.flytech-pt.com
SI-3000 Celje
Eslovenia
Email: info@kanardia.eu Email: flytech@flytech-pt.com
Una gran cantidad de información útil y reciente se puede encontrar también en Internet. Ver
http://www.kanardia.eu para más detalles.
Derechos de autor
Este documento se publica bajo la licencia Creative Commons, Attribution-ShareAlike 3.0 Unported.
Licencia completa está disponible en la página web http://creativecommons.org/licenses/by-
sa/3.0/ legalcode y resumen más legible está disponible en http://creativecommons.org/licenses/bysa/3.0/ . En definitiva, la licencia le da derecho a copiar, reproducir y modificar este documento si:
● usted cita el autor Kanardia d.o.o. de la obra original y
● deberá distribuir el trabajo resultante sólo bajo la licencia idéntica a ésta.
Este documento fue escrito usando LibreOffice writer que se ejecuta en el sistema operativo
Kubuntu. La mayoría de las cifras se extrajeron utilizando LibreOffice Draw y aplicaciones de
Inkscape. Fotos y escanean el material se procesó utilizando Gimp. Todas las fuentes de documentos
están disponibles gratuitamente en solicitud de amparo de la licencia se mencionó anteriormente y se
pueden obtener por correo electrónico. Favor de enviar peticiones a info@kanardia.eu.
Historial de revisiones
La siguiente tabla muestra el historial de revisión de este documento.
Revisión Fecha Descripción
1.0 Enero 2015 Versión inicial del manual de NESIS III
1.1 Febrero 2015 Fueron añadidos umbrales del libro de registro para
detecciones del despegue y aterrizaje.
Las versiones más recientes de los documentos se pueden descargar desde el sitio website Kanardia.
http://www.kanardia.eu/downloads/nesis.

Índice
1 Introducción.........................................................................................................................................5
1.1 Información general sobre el NESIS...........................................................................................5
1.2 Principios de la Operación...........................................................................................................6
1.2.1 Actitud, rumbo y velocidad......................................................................................................7
1.2.2. Sensores del motor...................................................................................................................7
1.2.3. Calibración de los sensores......................................................................................................8
1.3 Mapas, Información de vuelos y navegación..............................................................................8
1.3.1 Mapas gratuitos....................................................................................................................8
1.3.2 Mapas Raster con licencia...................................................................................................8
1.3.3 Mapas de usuario.................................................................................................................9
1.3.4 Aviso Legal..........................................................................................................................9
2 Conceptos Básicos del NESIS...........................................................................................................10
2.1 Panel de Comando.....................................................................................................................10
2.2 Pantalla Táctil............................................................................................................................11
2.3 Encender/Apagar.......................................................................................................................11
2.4 Procedimiento de arranque........................................................................................................11
3 Cuatro Pantallas Principales..............................................................................................................13
3.1 Pantalla Clásica..........................................................................................................................13
3.2 Pantalla de Navegación.............................................................................................................14
3.3 Pantalla del Motor.....................................................................................................................15
3.4 Pantalla Moderna.......................................................................................................................16
4 Acciones durante el vuelo..................................................................................................................20
4.1 Ajuste de QNH...........................................................................................................................20
Ajuste Inicial del QNH...............................................................................................................20
4.2 Lista de los aeródromos más cercanos......................................................................................21
4.3 Seleccionar un Waypoint...........................................................................................................22
4.3.1 Crear el Marcador..............................................................................................................22
4.4 Ruta............................................................................................................................................23
4.4.1 La activación de una ruta...................................................................................................23
4.4.2 Creación de una nueva ruta................................................................................................23
4.4.3 Eliminar una ruta................................................................................................................24
4.4.4 Cambiar el nombre de una ruta..........................................................................................24
4.4.5 Invertir una ruta..................................................................................................................24
4.4.6 Desactivar una ruta............................................................................................................24
4.4.7 Selección individual de un Waypoint o Pierna individual de la ruta activa.......................25
4.5 Ajuste de nivel de combustible..................................................................................................25
4.6 Ajuste de corrección de Pitch....................................................................................................25
4.7 Trim del Pitch............................................................................................................................25
4.8 Posición del Flap.......................................................................................................................26
5 Opciones............................................................................................................................................27
5.1 Libro de registros.......................................................................................................................28
5.1.1 Copie Vuelo en USB..........................................................................................................29

5.1.2 Copie Libro de registro en USB.........................................................................................29
5.2 Rutas..........................................................................................................................................29
5.3 Unidades....................................................................................................................................30
5.4 Brillo..........................................................................................................................................30
5.5 Volumen.....................................................................................................................................31
5.6 Alarmas......................................................................................................................................31
5.7 ADS-B/Flarm.............................................................................................................................31
5.8 Configuraciones.........................................................................................................................32
5.9 Pilotos........................................................................................................................................34
5.10 Transferencia...........................................................................................................................35
5.11 Waypoints................................................................................................................................35
5.12 Brújula.....................................................................................................................................36
5.13 Actualizaciones........................................................................................................................36
5.14 Servicio....................................................................................................................................36
6 Actualización de software.................................................................................................................37
6.1 Descarga de actualizaciones......................................................................................................37
6.2 Copiar archivo de actualización a memoria USB......................................................................37
6.3 Realización de la actualización..................................................................................................37
6.4 Modo de Actualización directa (modo de emergencia).............................................................38
7 Instrumentos......................................................................................................................................39
7.1 Anemòmetro..............................................................................................................................39
7.2 Actitud (AHRS) Indicador.........................................................................................................40
7.3 Indicador de Altitud...................................................................................................................41
7.4 Indicador de velocidad vertical y acelerómetro.........................................................................41
7.5 Tacómetro (RPM) y indicador múltiple de presión de colector................................................42
7.6 Indicador de RPM del motor y del rotor del Autogiro..............................................................42
7.7 Rotor del helicóptero Rotor y indicador de RPM del motor......................................................43
7.8 Mapa Móvil...............................................................................................................................44
7.9 Mini Monitor del Motor............................................................................................................45
7.10 Monitor del ordenador de combustible....................................................................................45
7.11 Indicador de dirección.............................................................................................................46
7.12 OAT, Tiempo de vuelo, Combustible......................................................................................47
8 Opciones del Modo de Servicio........................................................................................................48
8.1 Configuraciones.........................................................................................................................48
8.1.1 “Layout”.............................................................................................................................48
8.1.2 Clásico Medio....................................................................................................................48
8.1.3 Clásico derecha..................................................................................................................49
8.1.4 Demo..................................................................................................................................49
8.1.5 Reserva de Altitud & Finesse.............................................................................................49
8.2 Nivel AHRS...............................................................................................................................49
8.2.1 Desalineación de Yaw........................................................................................................50
8.2.2 Auto Ajuste.........................................................................................................................50
8.3 Motor.........................................................................................................................................50
8.3.1 Tipo de motor.....................................................................................................................51
8.3.2 Sensores/Lista de funciones...............................................................................................51
8.4 Depósito.....................................................................................................................................52

8.4.1 Software del depósito de combustible...............................................................................52
8.4.2 Depósito de combustible....................................................................................................52
8.5 Compensación...........................................................................................................................52
8.6 Piloto Automatico......................................................................................................................52
8.7 Especial......................................................................................................................................52

NESIS III Manual del Usuario Revisión 1.0
1 Introducción
En primer lugar nos gustaría darle las gracias por la compra de nuestro producto. NESIS es un
instrumento complejo y le recomendamos leer el manual antes de utilizar NESIS. El capítulo de
introducción contiene información general sobre el instrumento y los principios de la operación.
En capítulos posteriores describen la utilización del NESIS y revela los detalles.
Usted puede estar interesado en la lectura también:
NESIS Guía de Compra,
Manual de instalación NESIS,
Manual de instalación Daqu,
Manual MAGU,
nuestra página web www.kanardia.eu.
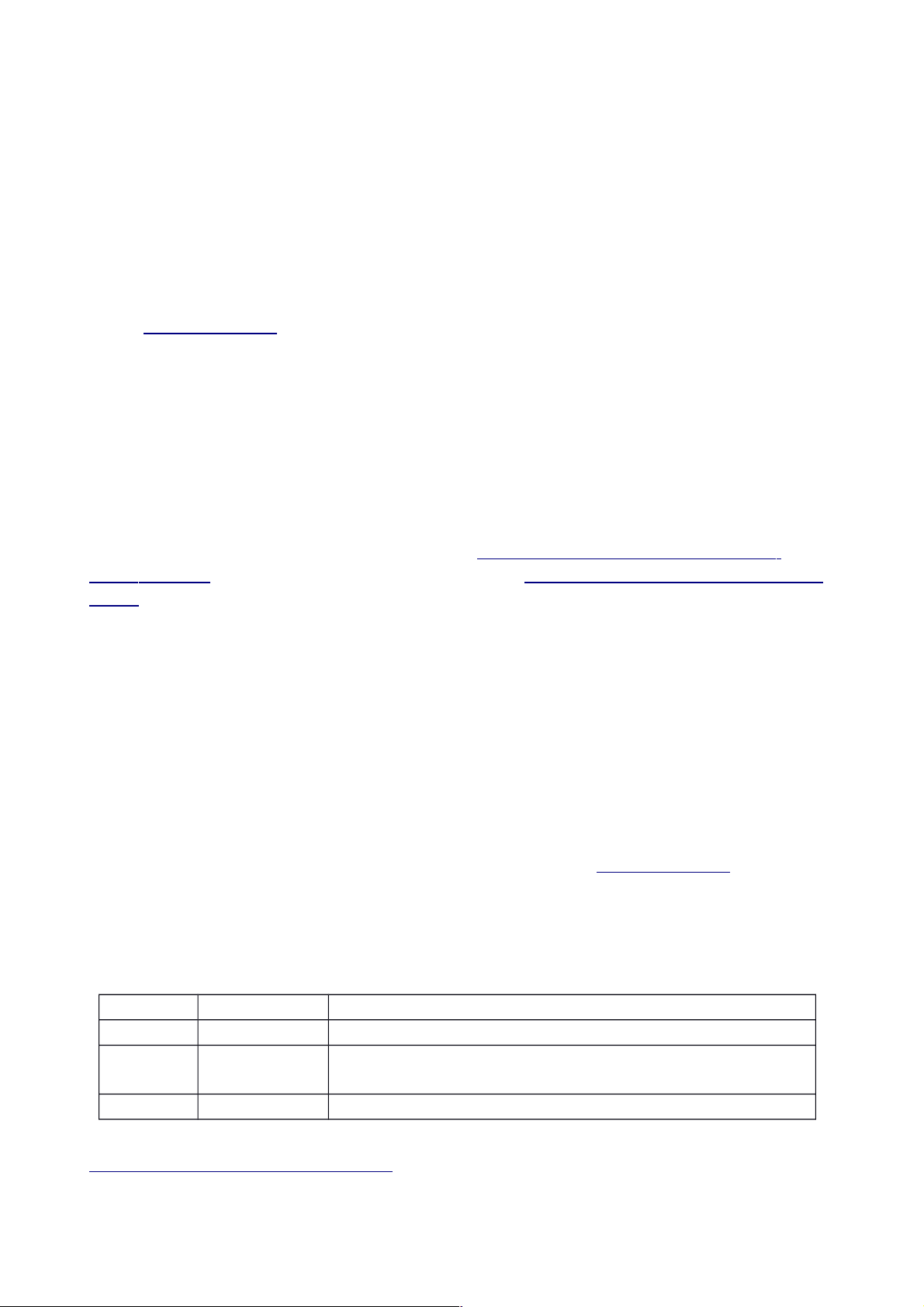
1.1 Información general sobre el NESIS
NESIS consta de unidades electrónicas que trabajan en estrecha colaboración para lograr
el vuelo, el motor y la información del carburante en el display gráfico. El sistema se
presenta en la Figura 1. El sistema consta de los siguientes componentes electrónicos:
Unidad de monitorización del motor (Daqu) - se utiliza para conectar el motor, el
combustible y sensores eléctricos.
AIRU (AHRS con sensores de presión y unidad de GPS) más adelante se hace referencia
como unidad AHRS. Se trata de una unidad de navegación inercial con la ayuda de los
sensores de GPS y de presión, proporciona actitud, posición y velocidades. Unidad AHRS
se oculta dentro de la pantalla principal NESIS.
Unidad MABU - es una unidad oculta y sirve como placa madre para el ordenador
incorporado, como registrador de datos y como una interfaz de bus CAN. MABU es una
parte integral de cualquier pantalla NESIS.
NESIS pantalla primaria - se presenta toda la información relevante que aparece en el bus
CAN en una forma amigable para el piloto en una pantalla LCD de gran tamaño. La
mayor parte de este manual se describe la forma de acceder, leer e interactuar con la
pantalla NESIS.
5
NESIS III Manual del Usuario Revisión 1.0
Daqu
Airu
Nesis display
Firewall
CAN bus
Mabu
Figura 1: Ilustración de la configuración típica NESIS.
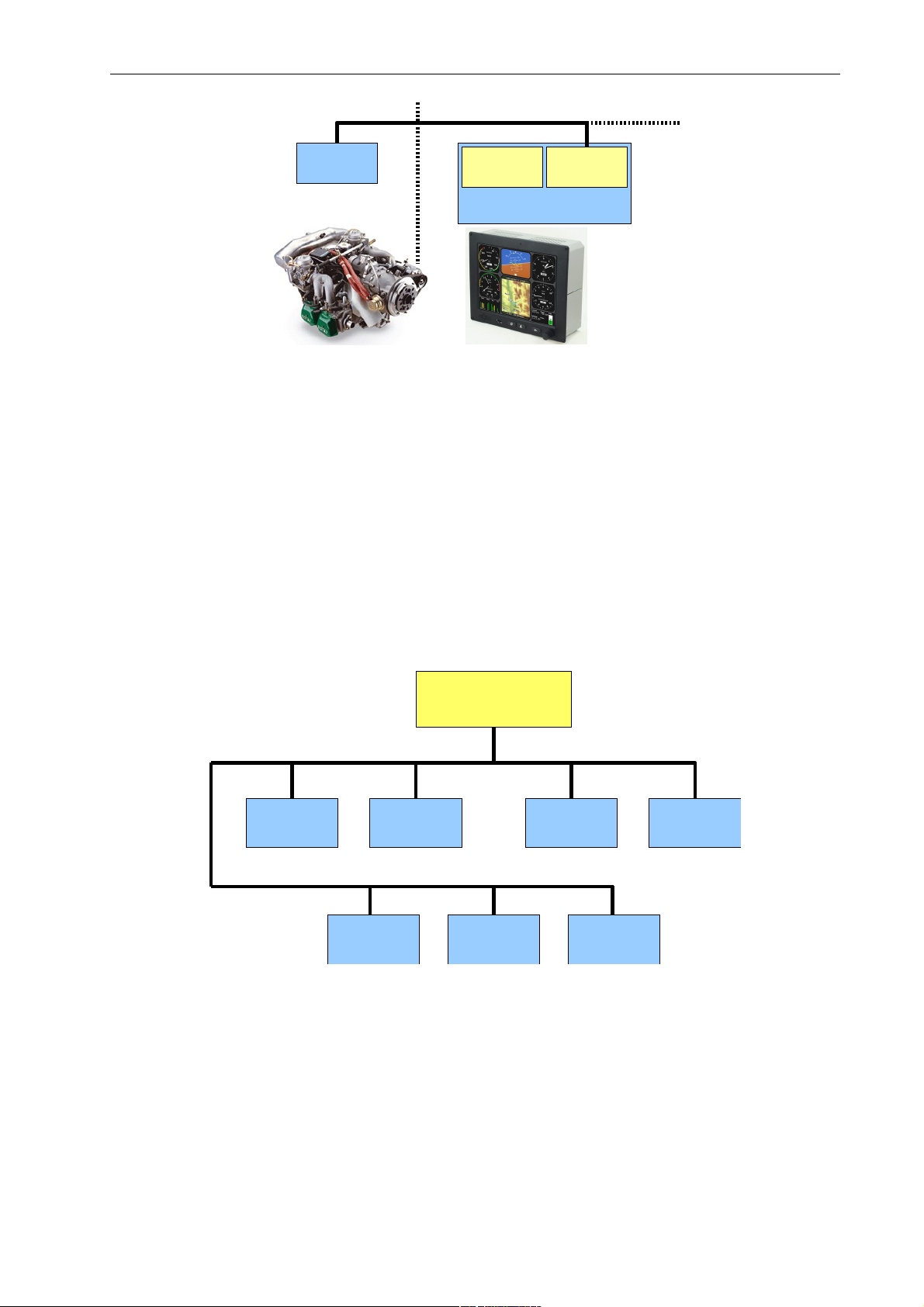
El sistema NESIS se puede extender fácilmente en una forma mucho más compleja, que se
muestra en Figura 2. Esto lo conseguimos mediante el bus CAN para la comunicación entre las
unidades. El bus CAN hace la magia de las todas las posibles ampliaciones futuras conocidas y
desconocidas. Imagine el bus CAN como una especie de red de ordenadores. Al igual que los
nuevos ordenadores se pueden conectar fácilmente a la red, nos conectamos todos los nuevos
dispositivos a la CAN. Esto permite la introducción de pantalla secundaria NESIS, servos de
piloto automático, sistema Geoniss, stick de mando electrónico, conexión con transpondedor,
radio ... Aunque la pantalla NESIS secundaria no tiene la unidad AHRS dentro, esto es totalmente
funcional y se comporta casi exactamente igual que la primaria pantalla NESIS.
La familia NESIS de productos y accesorios sigue creciendo y creciendo. Por favor, consulte la
Guía de Compra NESIS para opciones más disponibles.
Basic Nesis
Secondary
Display
Autopilot
Servo 1
Autopilot
Servo 2
Electronic
Compass
Pilot Stick
Geoniss
Gimble
Special
Devices
CAN bus
CAN bus
Figura 2: Ilustración de configuración NESIS extendida usando bus CAN.
1.2 Principios de la Operación
Como se indicó anteriormente NESIS utiliza unidades especiales para proporcionar la
información. La información de vuelos (actitud, posición y velocidad) se obtiene por AHRS y
MAGU (brújula electrónica) unidades, mientras que toda la información relacionada con el motor
se obtiene de unidad Daqu. Todas estas unidades están conectadas al bus CAN.
6

NESIS III Manual del Usuario Revisión 1.0
1.2.1 Actitud, rumbo y velocidad
NESIS utiliza sensores MEMS1 “state of art” para leer varias cantidades físicas. Dado que todos
los sensores están en estado sólido, NESIS no tiene partes móviles. Esto significa que tiene
menos problemas con la fatiga y el envejecimiento. Los siguientes sensores MEMS se utilizan en
el sistema NESIS:
Los sensores de velocidad angular, también conocidos como giroscopios, se utilizan en el
cálculo de actitud. Las velocidades angulares se integran en el tiempo con el fin de
predecir nueva actitud de la antigua. Podríamos decir que dan predicción actitud de corta
duración. También se utilizan en el cálculo de vector de gravedad.
Los sensores de aceleración están midiendo aparente vector de gravedad. El verdadero
vector de gravedad se calcula asumiendo vuelo coordinado y lecturas de los otros sensores
(velocidad y sensores de velocidad angular). El indicador de la bola de deslizamiento se
obtiene directamente de los sensores de aceleración. El sensor de presión absoluta se
utiliza para calcular la altitud y la velocidad vertical (vario).
El sensor de presión diferencial proporciona velocidad indicada (IAS). Cuando está
acoplada con el sensor de temperatura del aire exterior, sino que también calcula la
velocidad de aire verdadera (TAS).
Los sensores de campo magnético se usan para medir el vector de campo magnético. Se
necesita este vector para determinar el rumbo magnético y verdadero del avión. También
necesita declinación magnética, que se calcula de forma automática desde el modelo2
magnético del mundo cuando se conoce la posición del avión. Tenga en cuenta que el
sensor de campo magnético es opcional y NESIS funciona bien sin él.
Suponiendo vuelo coordinado, calculamos la actitud de referencia desde el vector de gravedad y
el rumbo. Estos valores se comparan entonces con la predicción a corto plazo de la actitud. Filtros
de Kalman no lineales se utilizan para combinar la predicción a corto plazo y haciendo referencia
a solución de actitud en una solución más probable. Esto es lo que se ve en el indicador de
actitud. De una manera muy similar, la predicción de corto plazo de la posición inercial se
compara con la posición GPS. Una vez más, el filtrado de Kalman se utiliza para obtener la
solución final.
1.2.2. Sensores del motor
Sensores relacionados con el motor están conectados a la unidad de monitorización del motor
(Daqu). La unidad Daqu está diseñada para ser instalada en el lado del motor del firewall. Esto
tiene dos ventajas:
● Dado que la unidad está cerca del motor, todos los cables son cortos y no se necesitan
extensiones. Esto significa menos peso y hace que la instalación más simple.
● Sólo necesitamos un pequeño agujero a través del servidor de seguridad para el cable de
bus CAN. Este cable transfiere toda la información y proporciona la fuente de
1 MEMS - micro-electromechanical systems, aka micro machines, aka micro systems technology.
2 El modelo magnético del mundo es mantenido y actualizado por el Centro Nacional de Datos de Geofísica,
http://www.ngdc.noaa.gov/geomag/
7

NESIS III Manual del Usuario Revisión 1.0
alimentación para la unidad DAQU
El DAQU está diseñado para controlar los sensores del motor para varios motores de hasta seis
cilindros (por ejemplo Rotax, Jabiru, Lycoming, etc.). Cuando un motor está equipado con
sensores adecuados, puede medir las RPM del motor, temperatura de la cabeza del cilindro
(CHT), la temperatura del gas de escape (EGT), presión del aceite, temperatura del aceite, presión
del combustible, el flujo de combustible, nivel de combustible, presión del colector, temperatura
del aire del carburador , voltaje, corriente de la batería, la corriente del alternador, temperatura del
refrigerante y más. En el caso de autogiro3 o instalación helicóptero, también lee el sensor de
RPM del rotor. Los resultados de todas estas mediciones se transmiten en el bus CAN, donde
todas las demás unidades son capaces de leerlos.
1.2.3. Calibración de los sensores
Casi todos los sensores MEMS tienen un problema común - que son sensibles al cambio de
temperatura. Esto significa que cada unidad debe ser calibrada individualmente. Cada sensor de
cada unidad se mide a diferentes temperaturas y se comparó con los valores de referencia. Los
resultados se optimizan matemáticamente con el fin de minimizar los errores en los sensores.
Resultantes son coeficientes de calibración escrita en la memoria flash del microcontrolador. Este
procedimiento se puede realizar en el laboratorio sólo, ya que se necesitan algunas herramientas y
máquinas especiales.
La calibración de la brújula, sin embargo, es una excepción. Aunque la brújula electrónica
(MAGU) está calibrada cuidadosamente en nuestro laboratorio, necesita ser recalibrada en su
avión. Prácticamente todas las aeronaves que tiene un poco de material magnético presente en el
entorno de la brújula. Dicho material localmente perturba el campo magnético de la Tierra y la
brújula debe tomar este disturbios en cuenta. Consulte el Manual MAGU para una explicación
detallada.
1.3 Mapas, Información de vuelos y navegación
Mapas, información de vuelo y de navegación, se obtiene de muchas fuentes diferentes. Muchas
de estas fuentes son de libre acceso en Internet, mientras que la información algunos mapas raster
tiene licencia y está provisto de fuentes oficiales. Siempre que sea posible, es hecha la
comprobación cruzada de la información y tratamos de hacerla actual. Sin embargo, esto no es
posible en todos los aspectos y la calidad de la información puede variar de país a país.
1.3.1 Mapas gratuitos
Mapas gratuitos son proporcionados por Kanardia como una combinación de varias fuentes
gratuitas. Ellos cubren la mayor parte del mundo poblada, pero su precisión es limitada a la
calidad de la información que transmitimos en. Esto mapa comportarse como un mapas
vectoriales y se puede girar a la pista o al frente de posición.
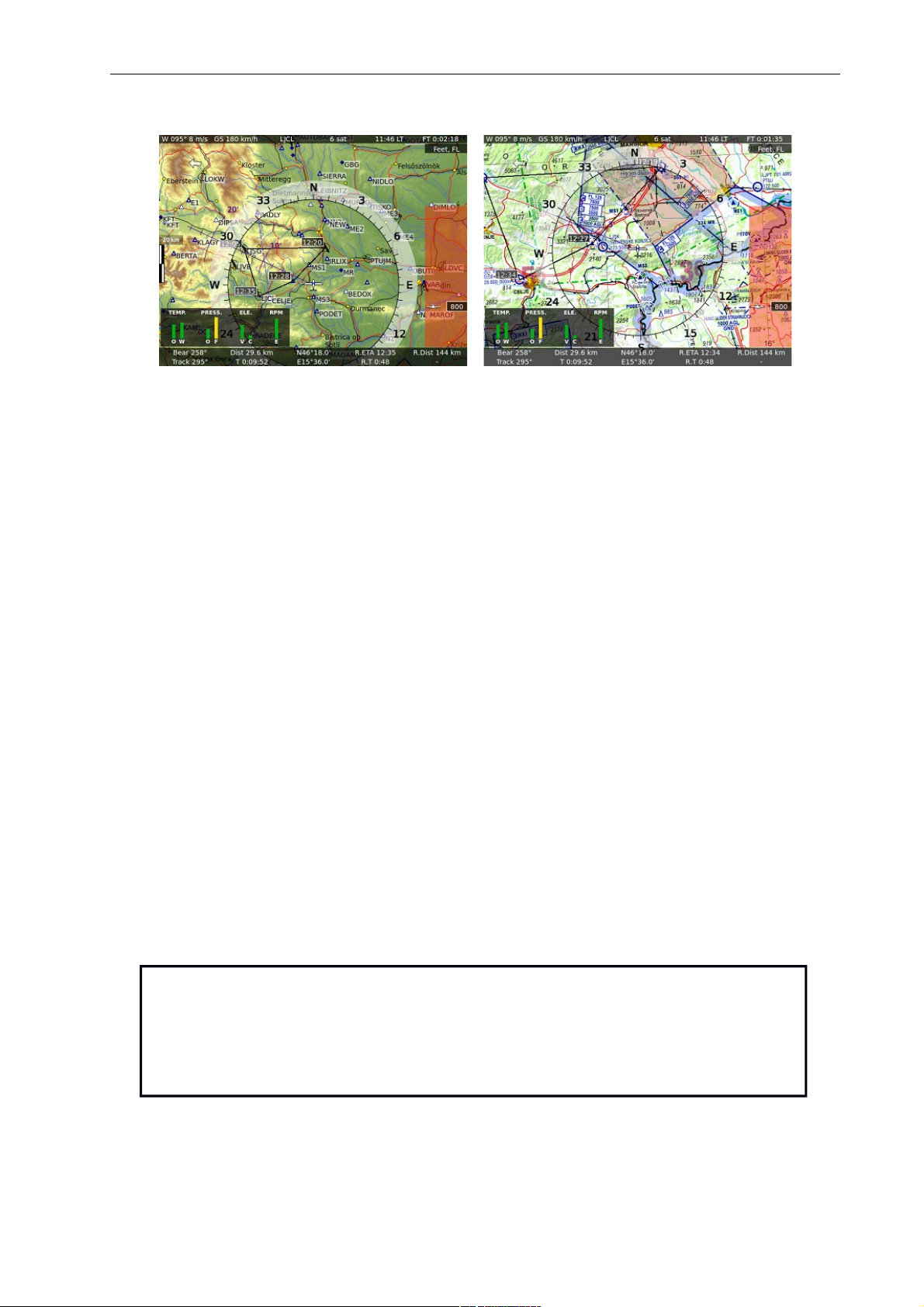
1.3.2 Mapas Raster con licencia
Actualmente son proporcionados mapas raster ICAO y Visual 500 hechos por DFS (Deutsche
3 Utilizamos el término autogiro en este manual. Este término también se conoce con otros nombres ...
8
NESIS III Manual del Usuario Revisión 1.0
Flugsigrung) . Estos mapas requieren una licencia, que debe adquirirse.
Figure 3: Mapa vectorial libre (izquierda), mapa raster con licencia (derecha).
1.3.3 Mapas de usuario
También es posible utilizar mapas específicos de usuario que se basan ya sea en un mapa de papel
o en un formato de imagen electrónico.
• Los mapas en papel deben ser escaneados por primera vez en un escáner de gran formato
de alta calidad. La mejor resolución de escaneo parece ser de 250 ppp para el 1: mapa a
escala 500 000. El resultado del análisis se almacenan en formato bmp, tiff, o png. Por
favor, no use formato jpeg, o formatos similares “non-lossless”.
• Los mapas electrónicos pueden ser utilizados, si están en formato adecuado. Aceptamos
cualquier formato de imagen estándar (como bmp, tiff, png, ...)
Una vez que tengamos el mapa en formato electrónico, tenemos que hacer la georreferenciación.
Este es un proceso simple, que se realiza mediante un programa informático especial. El resultado
de georreferenciación se transfiere a NESIS.
Importante: Es su responsabilidad verificar cualquier problema con la licencia del mapa, antes de
iniciar cualquier acción con el mapa del usuario.
1.3.4 Aviso Legal
Es importante tener en cuenta que no podemos garantizar que la información incluida en
NESIS o de otra manera proporcionada por Kanardia es actual y correcta. Es responsabilidad
del piloto para prepararse para el vuelo y para recoger toda la información necesaria a partir
de fuentes fiables. Se sugiere fuertemente que el piloto mantiene mapas de navegación
impresa válidos y otro material requerido legalmente a disposición en cualquier momento
durante el vuelo.
9

NESIS III Manual del Usuario Revisión 1.0
2 Conceptos Básicos del NESIS
En este capítulo se describe la organización del instrumento NESIS. Se le enseña sobre los
botones individuales y su significado. Después de la lectura, usted estará familiarizado con las
operaciones básicas NESIS. Las próximas secciones revelan los detalles.
2.1 Panel de Comando
El panel de comando NESIS está organizado de acuerdo con la Figura 4. Utiliza tres botones y un
botón de rotación que se pulsa para manipular la interfaz del usuario. Cuenta con un puerto USB
para actualizaciones de software, mapas y datos.
12
3 45
Figura 4: Organización del panel frontal NESIS.
He aquí una breve descripción de los elementos individuales:
1. El botón rotativo pulsador de selección, se utiliza sobre todo para seleccionar cosas,
confirmar la selección, los valores de cambio, cambiar los niveles de zoom, etc. Gire el
botón para seleccionar las cosas y pulse el botón para confirmar.
2. El botón “Close/Back/Cancel” se utiliza para cerrar las ventanas abiertas, para volver o
para cancelar alguna acción.
3. Se utiliza el botón “Page Switching” para cambiar la pantalla a la siguiente página.
4. El botón “User” realiza la acción seleccionable por el usuario. Por defecto y en
configuración normal que muestra la lista de aeropuertos más cercanos, pero cuando se
detecta el piloto automático, se inicia las acciones del piloto automático.
5. El puerto USB se utiliza para actualizaciones de software, de mapas y datos, y para copiar
los vuelos y libro de registro, etc.
La mayoría de las acciones se pueden también hacer usando la pantalla táctil. La pantalla táctil
10

NESIS III Manual del Usuario Revisión 1.0
funciona de una manera similar a las tabletas y los teléfonos hacen.
2.2 Pantalla Táctil
NESIS puede estar equipado con la pantalla táctil. La pantalla táctil simplifica significativamente
el manejo y demuestra ser muy útil. Se comporta de una manera similar a la mayoría de los
teléfonos inteligentes y tabletas hacen. Además puede dar varios comandos a la pantalla
utilizando sólo el deslizamiento del dedo (gestos), que se enumeran a continuación:
• Un deslice del dedo en la pantalla para los interruptores de izquierda a la siguiente
pantalla;
• Un deslice del dedo en la pantalla para los interruptores recto a la pantalla anterior;
• Un deslice del dedo hacia arriba se abre el menú rápido;
• Un toque en el punto de navegación en la pantalla principal de navegación activa este
punto en el modo directo. Cuando más puntos están en la vecindad, se muestra una lista
de los puntos;
• Un toque en el altímetro ronda se abre la ventana de QNH;
• Un toque en el mapa pantalla clásico abre la pantalla de navegación;
• Un toque en el monitor de mini pantalla motor clásico abre la pantalla del motor.
2.3 Encender/Apagar
NESIS está conectado a una fuente de bus de aviónica que tiene un interruptor mecánico entre el
bus y la batería. Por lo tanto, se activa automáticamente y por lo tanto no tiene un botón de
encendido / apagado.
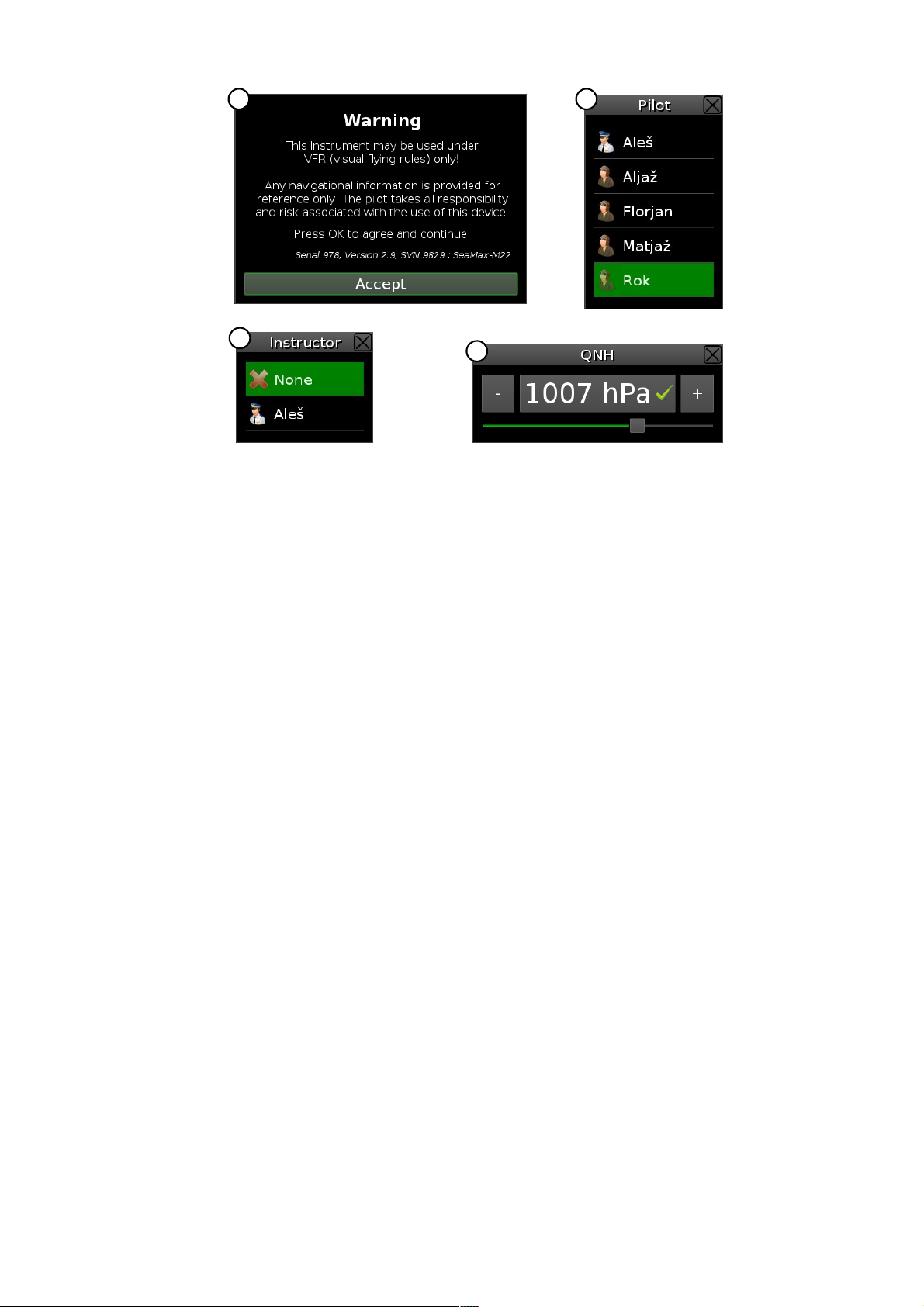
2.4 Procedimiento de arranque
Cuando NESIS está encendido y el programa está listo, se abre la ventana de secuencia de puesta
en marcha:
1. 1. Utilice el botón selector para confirmar la advertencia (pulse el botón)
2. 2. Seleccione el piloto,
3. 3. instructor,
4. 4. Seleccione el QNH (Hasta correcta rotación QNH se muestra y pulsar el botón)
5. 5. Ajuste el nivel de combustible (sólo para los tanques software).
Se le pide para que el piloto, sólo si hay más de uno piloto se introducen en la lista de piloto y
que se les pide para el instructor, sólo si al menos uno los pilotos se marca como un instructor.
Por favor, consulte la sección de la pagina de Pilotos 34 para ver cómo introducir pilotos e
instructores.
11
NESIS III Manual del Usuario Revisión 1.0
Figura 5: Secuencia típica de encendido
12
1 2
3
4

NESIS III Manual del Usuario Revisión 1.0
3 Cuatro Pantallas Principales
En esta sección se describen cuatro pantallas principales utilizados en NESIS. La mayoría de
estas pantallas son accesibles directamente pulsando el botón de conmutación página. Figura 6
ilustra todas las pantallas típicas disponibles en NESIS:
Figura 6: Cuatro pantallas principales en NESIS.
1. Pantalla Clásica,
2. Pantalla de Navegación,
3. Pantalla de Motor,
4. Pantalla Moderna (pueden tener diferentes formas),
3.1 Pantalla Clásica
La primera pantalla es la pantalla de información de vuelo clásico. Esta pantalla muestra
información de vuelo, que es la principal preocupación del piloto. Los instrumentos más
importantes tienen apariencia clásica y siguen el IFR T disposición recomendada (clásico paquete
de seis). Figura 7 muestra un ejemplo de esta pantalla. Todos los indicadores redondos son
totalmente configurables y pueden mostrar otra información también. En la sección 7 se
describen los indicadores más brevemente.
1. El fondo indicador puede mostrar los arcos blanco, verde y amarillo, límite VNE,
velocidad de aproximación recomendada y otros límites de velocidad importantes.
2. El indicador de horizonte artificial (AHRS) ofrece información de actitud actual y
deslizamiento lateral. Balanceo (roll) y ángulo de cabeceo (pitch) se pueden leer desde la
13
1 2
3 4

NESIS III Manual del Usuario Revisión 1.0
parte superior y media escala, respectivamente. La bola Indica el deslizamiento lateral.
3. El indicador de altitud muestra altitud actual baro-corregida. Está disponible en pies o
metros. Cuando se da escala en pies, la tercera aguja se puede demostrarse también.
También muestra la presión actual de referencia QNH (baro-corrección aka).
4. El indicador de velocidad vertical (aka vario). Vario se puede combinar con medidor de g
(aceleración) situado por debajo del centro.
5. El ordenador de combustible proporciona información de consumo de combustible. Nivel
del combustible en el tanque, el consumo actual y promedio de combustible, autonomía y
alcance aproximado. Este monitor se puede reemplazar también con el tiempo, el tiempo
de vuelo, el combustible y la indicación OAT (página 49).
6. El mapa móvil proporciona información básica de navegación. Se encuentra por debajo
del horizonte artificial. El mapa móvil puede ser configurado para seguir la aeronave
rumbo verdadero, seguimiento (“tracking”) o rumbo magnético. Este mapa puede ser
sustituido también con un DI (página 48).
7. El mini monitor del motor, organiza todos los parámetros del motor más importantes en
un simple mapa basado en barras de color. Cada barra corresponde a un parámetro y el
color de la barra a su estado actual.
8. El indicador de RPM se combina con el medidor de presión del colector. Esta
combinación permite un ajuste óptimo del nivel de potencia. Autogiros y helicópteros
tienen rotores y en este caso las RPM del motor se combina normamente con RPM del
rotor.
1
8
7
3
4
5
2
6
Figura 7: Ilustración de la pantalla de información de vuelo clásico..
3.2 Pantalla de Navegación
La pantalla de navegación es un grande mapa móvil combinado con alguna información
adicional. Un HSI de gran escala y la situación del espacio aéreo vertical, son visibles sobre el
mapa. Las barras superior e inferior se usan para mostrar otra información relevante que se
representa en la Figura 8.
14
NESIS III Manual del Usuario Revisión 1.0
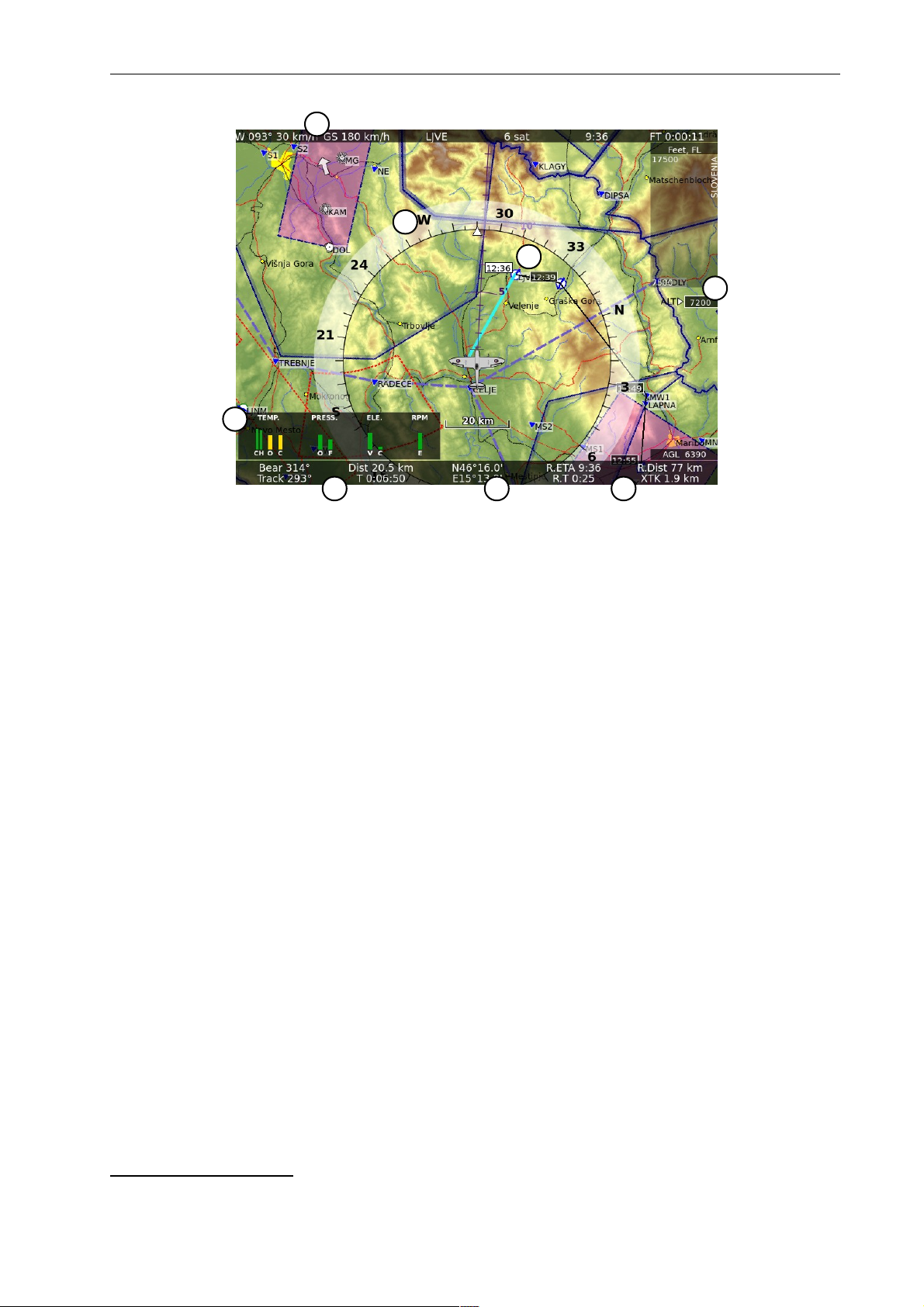
Figura 8: Ilustración de la pantalla de navegación.
1) Una gran círculo sobre el mapa informa sobre la situación de posición. El círculo HSI y el
mapa giran de acuerdo con el seguimiento actual, rumbo verdadero o rumbo magnético.
El seguimiento/rumbo (heading/tracking) se establece en la configuración.
2) Muestra la altitud baro-corregido actual, dando una idea de lo que es la posición vertical
respecto a los aviones en las zonas del espacio aéreo.
3) Información sobre ruta activa. El fondo incluye barra tiempo estimado de llegada al
último waypoint de la ruta, el tiempo desde el último waypoint de la ruta, la distancia a la
izquierda y error transversal (distancia perpendicular a la pierna activa).
4) La ruta se ilustra también en el mapa. Línea de negro representa la ruta, la línea cian más
gruesa se utiliza para la distancia restante en la pierna activa. Los rectángulos al lado de
los waypoints, muestran la hora estimada de llegada al waypoints waypoint.
5) La posición actual de la aeronave - las coordenadas de latitud y longitud4.
6) La barra inferior muestra el waypoint activo, rumbo, distancia, el seguimiento (tracking) y
el tiempo necesario para alcanzar el waypoint.
7) El mini monitor de motor es opcional y sólo se muestra cuando el motor está en marcha.
8) La barra superior muestra la velocidad del viento y la dirección actual5, la velocidad
respecto al suelo, el nombre del waypoint siguiente , el número de satélites GPS visibles,
hora local y el tiempo de vuelo.
3.3 Pantalla del Motor
La pantalla de control del motor muestra instrumentos clásicos de motor con sus diversos
parámetros, bien como relacionados con el combustible. Algunos instrumentos y los parámetros
son configurables y pueden ajustarse a sus necesidades individuales.
Figura 9 ilustra un ejemplo de la pantalla. Es altamente configurable, y su pantalla (configuración
para otras aeronaves) puede parecer muy diferentes.
4 Sistema WGS84 se utiliza para las coordenadas. El mismo sistema es utilizado por GPS.
5 La unidad MAGU se requiere para la información del viento..
15
8
1
4
2
7
6 3
5

NESIS III Manual del Usuario Revisión 1.0
1. El indicador de combustible combina los parámetros relacionados con el combustible
como el flujo de combustible, nivel de combustible y la presión del colector.
2. RPM del motor combinado con el cuenta horas de motor es una reproducción de un
instrumento clásico.
3. El indicador muestra la voltage y curriente. Típicamente se muestra la corriente del
alternador.
4. Presiones de aceite y combustible.
5. Temperatura del aceite.
6. Indicador de temperatura de la cabeza del cilindro (CHT) indicador. Dos CHT's son
monitoreados; por lo tanto, se muestran agujas para caliente (punto naranja) y frío (punto
azul). Cuando se controlan más de dos cilindros, se utilizan barras en lugar de las agujas.
7. Indicador de trim Pitch.
8. Indicador de posición de Flaps.
9. Temperatura del aire exterior (OAT).
1
4 6
7
3
5
2
8 9
Figura 9: Un ejemplo de la pantalla de control del motor.
3.4 Pantalla Moderna
La pantalla moderna de información de vuelo, se compone de una imagen de fondo y una
superposición. La imagen de fondo puede mostrar:
visión sintética,
gran horizonte artificial,
gran mapa móvil (similar a la pantalla de navegación),
lista de verificación,
una imagen, que muestra la imagen de vídeo en directo de una camera de vídeo USB
16
 Loading...
Loading...