

Page 1

SERVICE MANUAL
VIDEO CASSETTE RECORDER
HR-J691U/J694U/J695U/J698U
SPECIFICATIONS
GENERAL
Power requirement : AC 120 Vd, 60 Hz
Power consumption
Power on : 13 W
Power off : 1.5 W
Temperature
Operating : 5°C to 40°C (41°F to 104°F)
Storage : –20°C to 60°C (–4°F to 140°F)
Operating position : Horizontal only
Dimensions (W x H x D) : 435 mm x 94 mm x 247 mm
Weight : 2.7 kg (6.6 lbs)
Format : VHS NTSC standard
Maximum recording time
SP : 210 min. with ST-210 video cassette
EP : 630 min. with ST-210 video cassette
VIDEO/AUDIO
Signal system : NTSC-type color signal and EIA
Recording/Playback
system
Signal-to-noise ratio : 45 dB
Horizontal resolution : 230 lines
Frequency range
Normal audio : 70 Hz to 10,000 Hz
Hi-Fi audio : 20 Hz to 20,000 Hz
Input/Output : RCA connectors (IN x 1, OUT x 1)
(The specifications shown pertain specifically to the model HR-J698U.)
(17-1/4" x 3-3/4" x 9-3/4")
monochrome signal, 525 lines/
60 fields
: DA-4 (Double Azimuth) head helical
scan system
TUNER
Tuning system : Frequency-synthesized tuner
Channel coverage
VHF : Channels 2–13
UHF : Channels 14–69
CATV : 113 Channels
RF output : Channel 3, 4 or – (off) (preset to
Channel 3 when shipped) 75 ohms,
unbalanced
TIMER
Clock reference : Quartz
Program capacity : 1-year programmable timer/
8programs
ACCESSORIES
Provided accessories : RF cable (F-type),
Infrared remote control unit,
“AA” battery x 2
Specifications shown are for SP mode unless specified otherwise.
E. & O.E. Design and specifications subject to change without
notice.
HR-J691U/J691U(C)/J694U/J695U(C)/J698U(C) V15D1
This service manual is printed on 100% recycled paper.
COPYRIGHT © 2002 VICTOR COMPANY OF JAPAN, LTD
No.82904
January 2002
Page 2

Page 3
TABLE OF CONTENTS
Section Title Page Section Title Page
Important Safety Precautions
INSTRUCTIONS
1. DISASSEMBLY
1.1 Manually removing the cassette tape ..........................1-1
1.2 Removing the major parts ............................................1-2
1.2.1 How to read the procedure table............................. 1-2
1.2.2 Disassembly/assembly method ..............................1-2
1.3 Emergency display function ......................................... 1-4
1.3.1 Displaying the EMG information .............................1-4
1.3.2 Clearing the EMG history ........................................1-4
Details of the OSD display in the EMG display mode ...
1.3.3
1.3.4 EMG content description.........................................1-6
1.3.5 EMG detail information<1> .....................................1-7
1.3.6 EMG detail information<2> .....................................1-8
1.3.7 EMG detail information<3> .....................................1-8
1.4 Service position............................................................ 1-9
1.4.1 How to set the “Service position” ............................1-9
1.5 Jig RCU mode..............................................................1-9
1.5.1 Setting the Jig RCU mode ...................................... 1-9
1.5.2 Setting the User RCU mode ................................... 1-9
1.6 Mechanism service mode ............................................1-9
1.6.1 How to set the “Mechanism service mode” .............1-9
1.6.2 How to exit from the “Mechanism service mode” ....1-9
1.7 Maintenance and inspection ......................................1-10
1.7.1 Cleaning ................................................................1-10
1.7.2 Lubrication ............................................................ 1-10
Suggested servicing schedule for main components ...
1.7.3
2. DISASSEMBLING/ASSEMBLING OF MECHANISM
1. Before disassembling/assembling ................................. 2-1
1.1 Notes...........................................................................2-1
1.2 Mechanism operation check .......................................2-1
1.3 Setting the mechanism assembling mode ..................2-1
1.4 Layout of the main mechanism parts .......................... 2-2
1.5 Disassembling procedure table................................... 2-3
2. Replacement of the main mechanism parts...................2-4
2.1 Cassette holder ...........................................................2-4
2.2 A/C head ..................................................................... 2-5
2.3 Guide arm, pinch roller arm ........................................ 2-6
2.4 Idler arm, idler gear 1/2 ...............................................2-6
2.5 Main brake(T), brake lever, tension arm,
reel disk(S/T), Rec safety lever ...................................2-6
2.6 Press lever, control cam, capstan brake assembly,
loading motor assembly .............................................. 2-7
2.7 Capstan motor, load gear, control plate ......................2-8
2.8 Clutch unit assembly, direct gear ................................2-9
3. Mechanism timing chart ............................................... 2-10
1-5
1-10
4. CHARTS AND DIAGRAMS
4.1 BOARD INTERCONNECTIONS ................................4-3
4.2 MAIN(VIDEO/N.AUDIO) SCHEMATIC DIAGRAM.....4-5
4.3 MAIN(SYSCON) SCHEMATIC DIAGRAM.................4-7
4.4 MAIN(SW.REG) SCHEMATIC DIAGRAM..................4-9
4.5 MAIN(TUNER) SCHEMATIC DIAGRAM.................. 4-11
4.6 MAIN(FMA/DEMOD) SCHEMATIC DIAGRAM ........ 4-13
4.7 MAIN(FRONT) SCHEMATIC DIAGRAM.................. 4-15
4.8 MAIN(TERMINAL) SCHEMATIC DIAGRAM............4-17
4.9 MAIN CIRCUIT BOARD...........................................4-19
4.10 REMOTE CONTROLLER SCEMATIC DIAGRAM.4-21
FDP GRID ASSIGNMENT AND ANODE CONNECTION .
4.11
4.12 WAVEFORMS ........................................................4-22
4.13 VOLTAGE CHARTS...............................................4-23
4.14 CPU PIN FUNCTION .............................................4-24
4.15 SYSTEM CONTROL BLOCK DIAGRAM...............4-25
4.16 VIDEO BLOCK DIAGRAM .....................................4-27
4.17 AUDIO BLOCK DIAGRAM..................................... 4-29
5. PARTS LIST
5.1 PACKING AND ACCESSORY ASSEMBLY<M1> ........5-1
5.2 FINAL ASSEMBLY<M2>..............................................5-2
5.3 MECHANISM ASSEMBLY<M4> ..................................5-4
5.4 ELECTRICAL PARTS LIST..........................................5-6
MAIN BOARD ASSEMBLY<03> ...................................... 5-6
A/C HEAD BOARD ASSEMBLY<12> ............................ 5-10
LOADING MOTOR BOARD ASSEMBLY<55>...............5-10
4-21
3. ADJUSTMENT
3.1 Precaution ....................................................................3-1
3.1.1 Required test equipments .......................................3-1
3.1.2 Required adjustment tools ......................................3-1
3.1.3 Color(colour) bar signal, color(colour) bar pattern ..3-1
3.1.4 Switch settings ........................................................3-1
Manual tracking mode (Auto tracking ON/OFF) setting ...
3.1.5
3.2 Mechanism compatibility adjustment ...........................3-2
3.2.1 Tension pole position...............................................3-2
3.2.2 FM waveform linearity .............................................3-2
3.2.3 Height and tilt of the A/C head ................................3-3
3.2.4 A/C head phase(X-value)........................................ 3-3
3.3 Electrical Adjustment....................................................3-4
3.3.1 Servo circuit ............................................................3-4
3.3.1.1 Switching point ...................................................3-4
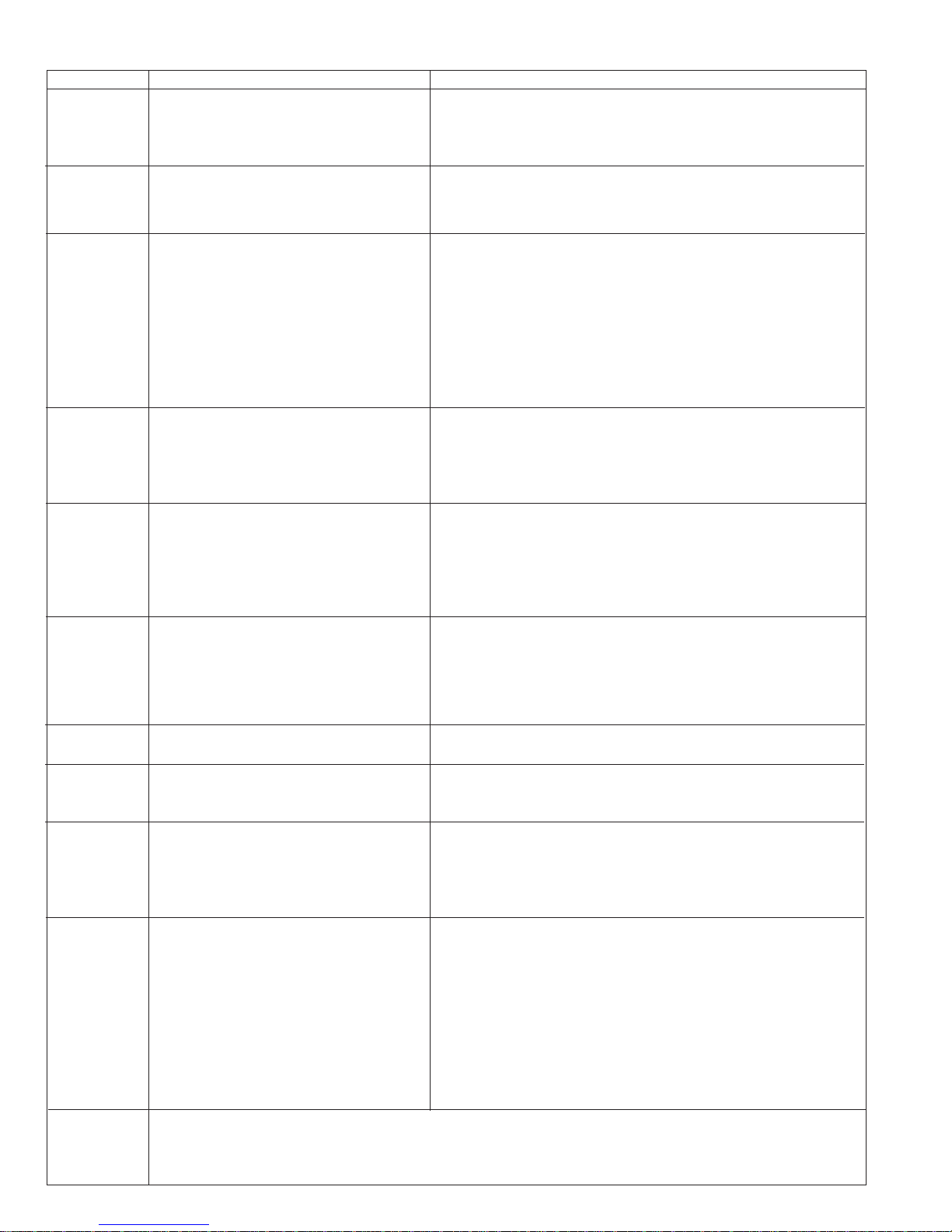
The following table lists the differing points between models HR-J691U, J691U(C), J694U, J695U(C) and J698U(C).
ITEM
BODY COLOR BLACK PURE-SILVER BLACK
RCU ILUMINATION FUNCTION NOT USED USED
CHILD LOCK NOT USED
Notes: Mark
is same as left.
MODEL
HR-J691U
3-1
HR-J691U(C) HR-J694U HR-J695U(C) HR-698U(C)
USED NOT USED
Page 4
Important Safety Precautions
cut close to connector
Prior to shipment from the factory, JVC products are strictly inspected to conform with the recognized product safety and electrical codes
of the countries in which they are to be sold. However, in order to maintain such compliance, it is equally important to implement the
following precautions when a set is being serviced.
v
Precautions during Servicing
1. Locations requiring special caution are denoted by labels and
inscriptions on the cabinet, chassis and certain parts of the
product. When performing service, be sure to read and comply with these and other cautionary notices appearing in the
operation and service manuals.
2. Parts identified by the
critical for safety.
Replace only with specified part numbers.
Note: Parts in this category also include those specified to com-
ply with X-ray emission standards for products using
cathode ray tubes and those specified for compliance
with various regulations regarding spurious radiation
emission.
3. Fuse replacement caution notice.
Caution for continued protection against fire hazard.
Replace only with same type and rated fuse(s) as specified.
4. Use specified internal wiring. Note especially:
1) Wires covered with PVC tubing
2) Double insulated wires
3) High voltage leads
5. Use specified insulating materials for hazardous live parts.
Note especially:
1) Insulation Tape 3) Spacers 5) Barrier
2) PVC tubing 4) Insulation sheets for transistors
6. When replacing AC primary side components (transformers,
power cords, noise blocking capacitors, etc.) wrap ends of
wires securely about the terminals before soldering.
symbol and shaded ( ) parts are
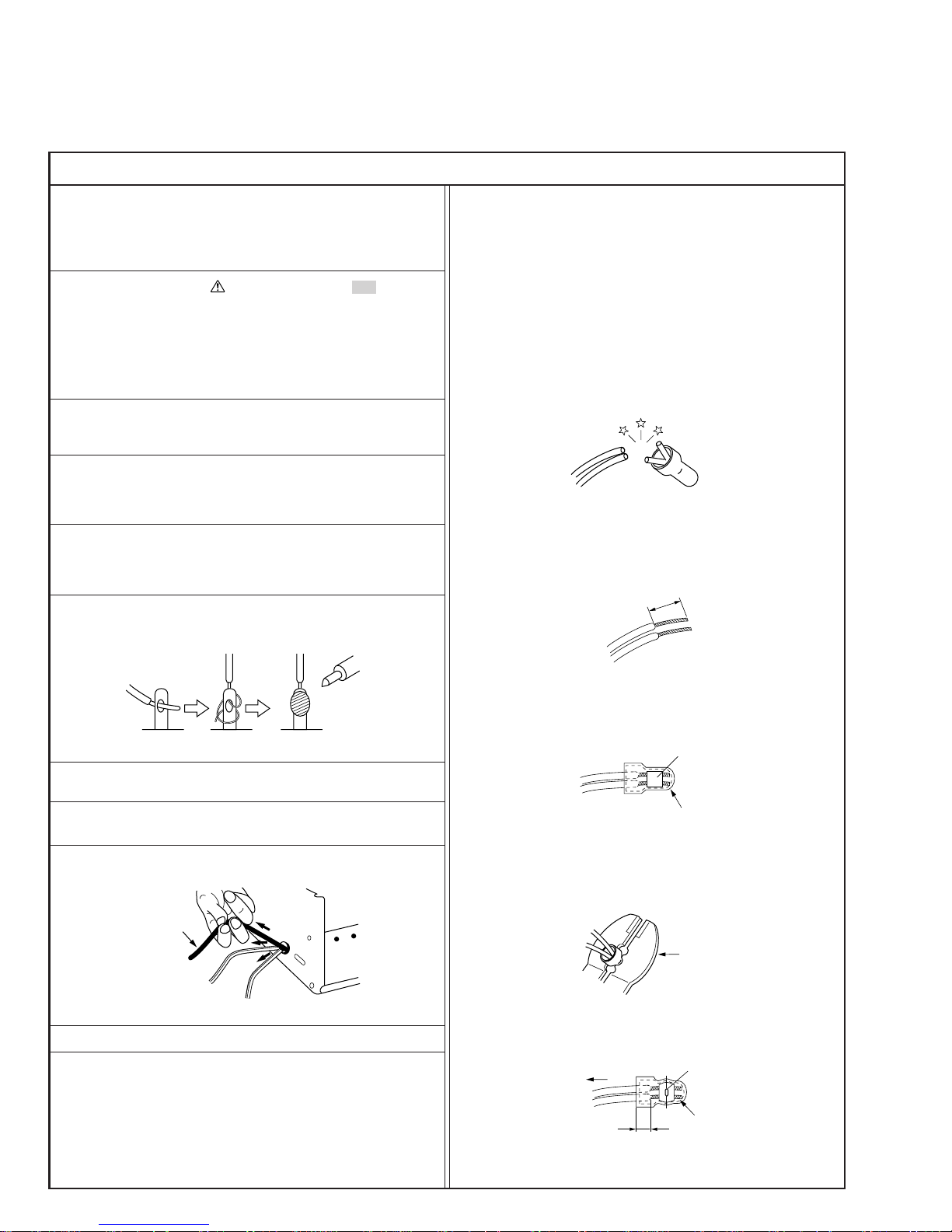
12. Crimp type wire connector
In such cases as when replacing the power transformer in sets
where the connections between the power cord and power
transformer primary lead wires are performed using crimp type
connectors, if replacing the connectors is unavoidable, in order to prevent safety hazards, perform carefully and precisely
according to the following steps.
1) Connector part number : E03830-001
2) Required tool : Connector crimping tool of the proper type
which will not damage insulated parts.
3) Replacement procedure
(1) Remove the old connector by cutting the wires at a point
close to the connector.
Important : Do not reuse a connector (discard it).
Fig.3
(2) Strip about 15 mm of the insulation from the ends of
the wires. If the wires are stranded, twist the strands to
avoid frayed conductors.
15 mm
Fig.1
7. Observe that wires do not contact heat producing parts
(heatsinks, oxide metal film resistors, fusible resistors, etc.)
8. Check that replaced wires do not contact sharp edged or
pointed parts.
9. When a power cord has been replaced, check that 10-15 kg of
force in any direction will not loosen it.
Power cord
Fig.2
10. Also check areas surrounding repaired locations.
11. Products using cathode ray tubes (CRTs)
In regard to such products, the cathode ray tubes themselves,
the high voltage circuits, and related circuits are specified for
compliance with recognized codes pertaining to X-ray emission.
Consequently, when servicing these products, replace the cathode ray tubes and other parts with only the specified parts.
Under no circumstances attempt to modify these circuits.
Unauthorized modification can increase the high voltage value
and cause X-ray emission from the cathode ray tube.
Fig.4
(3) Align the lengths of the wires to be connected. Insert
the wires fully into the connector.
Metal sleeve
Connector
Fig.5
(4) As shown in Fig.6, use the crimping tool to crimp the
metal sleeve at the center position. Be sure to crimp fully
to the complete closure of the tool.
1.25
2.0
5.5
Fig.6
(5) Check the four points noted in Fig.7.
Not easily pulled free
Wire insulation recessed
more than 4 mm
Fig.7
Crimping tool
Crimped at approx. center
of metal sleeve
Conductors extended
1
S40888-01
Page 5

v
d'
d
Chassis
Power cord,
primary wire
Safety Check after Servicing
Examine the area surrounding the repaired location for damage or deterioration. Observe that screws, parts and wires have been
returned to original positions, Afterwards, perform the following tests and confirm the specified values in order to verify compliance with safety standards.
1. Insulation resistance test
Confirm the specified insulation resistance or greater between power cord plug prongs and
externally exposed parts of the set (RF terminals, antenna terminals, video and audio input
and output terminals, microphone jacks, earphone jacks, etc.). See table 1 below.
2. Dielectric strength test
Confirm specified dielectric strength or greater between power cord plug prongs and exposed
accessible parts of the set (RF terminals, antenna terminals, video and audio input and output
terminals, microphone jacks, earphone jacks, etc.). See table 1 below.
3. Clearance distance
When replacing primary circuit components, confirm specified clearance distance (d), (d’) between soldered terminals, and between terminals and surrounding metallic parts. See table 1
below.
Fig. 8
4. Leakage current test
Confirm specified or lower leakage current between earth ground/power cord plug prongs
and externally exposed accessible parts (RF terminals, antenna terminals, video and audio
input and output terminals, microphone jacks, earphone jacks, etc.).
Measuring Method : (Power ON)
Insert load Z between earth ground/power cord plug prongs and externally exposed accessible parts. Use an AC voltmeter to measure across both terminals of load Z. See figure 9 and
following table 2.
Externally
exposed
accessible part
Z
V
Fig. 9
ab
c
5. Grounding (Class 1 model only)
Confirm specified or lower grounding impedance between earth pin in AC inlet and externally exposed accessible parts (Video in,
Video out, Audio in, Audio out or Fixing screw etc.).
Measuring Method:
Connect milli ohm meter between earth pin in AC inlet and exposed accessible parts. See figure 10 and grounding specifications.
AC inlet
Earth pin
AC Line Voltage
100 V
100 to 240 V
110 to 130 V
110 to 130 V
200 to 240 V
Exposed accessible part
Milli ohm meter
Fig. 10
Region
Japan
USA & Canada
Europe & Australia R 10 MΩ/500 V DC
Region Load Z
Insulation Resistance (R)
≤
R 1 MΩ/500 V DC
≥≥
1 MΩ R 12 MΩ/500 V DC
≤
Table 1 Specifications for each region
Grounding Specifications
Region
USA & Canada
Europe & Australia
Dielectric Strength
AC 1 kV 1 minute
AC 1.5 kV 1 miute
AC 1 kV 1 minute
AC 3 kV 1 minute
AC 1.5 kV 1 minute
(Class 2)
(Class 1)
Grounding Impedance (Z)
≤
Z 0.1 ohm
≤
Z 0.5 ohm
Clearance Distance (d), (d')
≤
d, d' 3 mm
≤
d, d' 4 mm
≤
d, d' 3.2 mm
≤
d 4 mm
≤
d' 8 mm (Power cord)
≤
d' 6 mm (Primary wire)
a, b, cLeakage Current (i)AC Line Voltage
100 V
110 to 130 V
110 to 130 V
220 to 240 V
Japan
USA & Canada
Europe & Australia
Note: These tables are unofficial and for reference only. Be sure to confirm the precise values for your particular country and locality.
≤
1 kΩ
0.15 µF
1.5 kΩ
2 kΩ
50 kΩ
Table 2 Leakage current specifications for each region
i 1 mA rms Exposed accessible parts
≤
i 0.5 mA rms
≤
i 0.7 mA peak
≤
i 2 mA dc
≤
i 0.7 mA peak
≤
i 2 mA dc
2
Exposed accessible parts
Antenna earth terminals
Other terminals
S40888-01
Page 6

Page 7
SECTION 1
Screw(a)
Screw(a)
Top frame
Cassette tape
Cassette holder
Side frame(R)
Side frame(L)
Hook(a)
Hook(b)
DISASSEMBLY
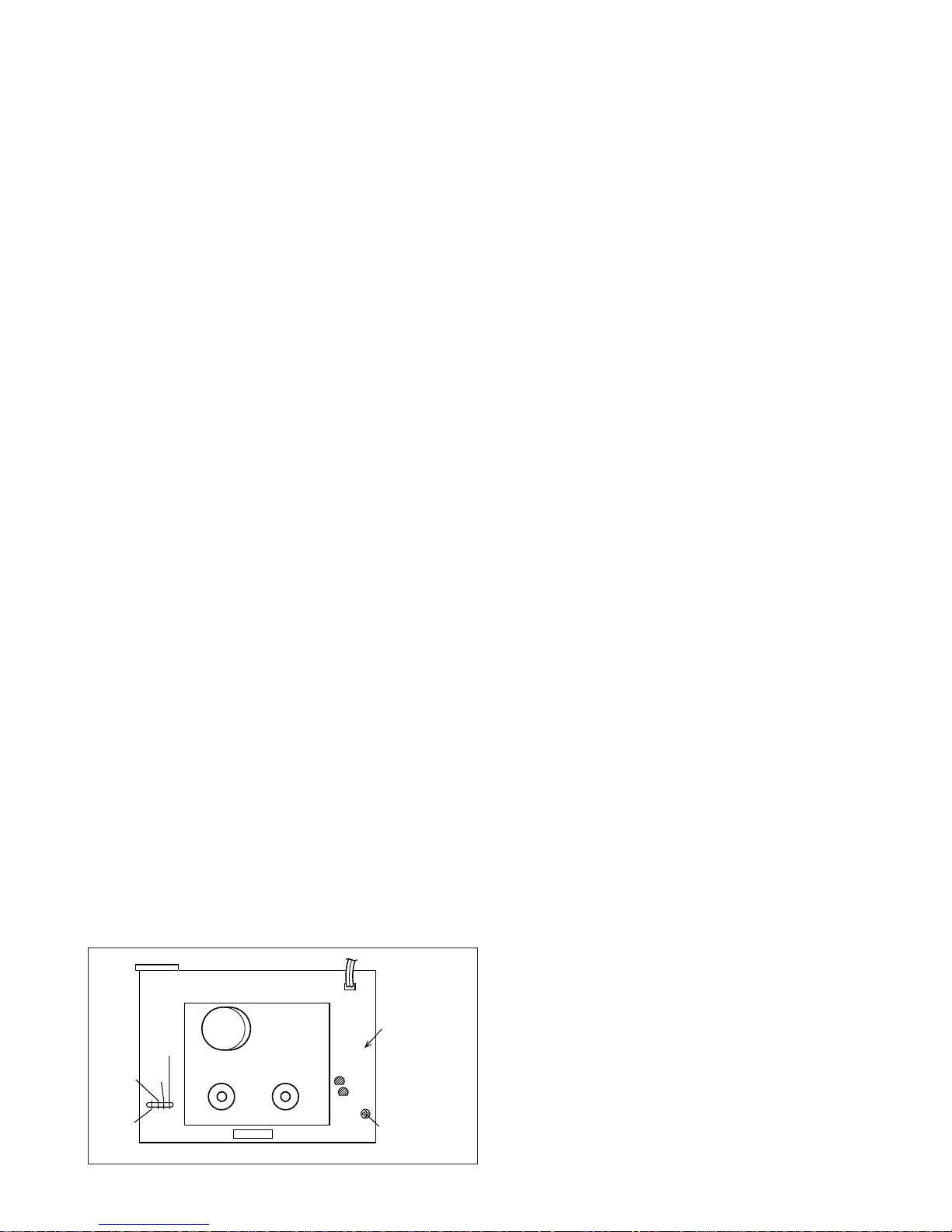
1.1 Manually removing the cassette tape
If you cannot remove the cassette tape which is loaded because of any electrical or mechanical failures, manually remove
it by taking the following steps.
(1) Unplug the power cord plug from the power outlet.
(2) Refer to the disassembly procedure of the VCR and perform
the disassembly of the major parts before removing the
mechanism assembly. (refer to Fig. 1-1a)
Fig. 1-1a
(3) Unload the pole base assembly by manually turning the gear
of the loading motor until the pole base assembly is hidden
behind the cassette lid. In doing so, hold the tape by the hand
to keep the slack away from any grease.
Tension arm assembly
Pole base assembly
Pinch roller arm assembly
In case of mechanical failures, while keeping the tension
arm assembly free from tension, pull out the tape on the
pole base assembly. Take the spring(a) of the pinch
roller arm assembly off the hook, and detach it from the
tape.
(4) Remove the screw (a) of the side frame (L/R).
(5) Hold the slack tape and cassette cover together, lift the
cassette tape, top frame, cassette holder and side frames
(L, R) together from the rear and remove them by disengaging the hooks (a) and (b).
Spring(a)
Fig. 1-1c
(6) Take up the slack of the tape into the cassette. This com-
pletes removal of the cassette tape.
Direction of unloading
Fig. 1-1b
1-1
Page 8
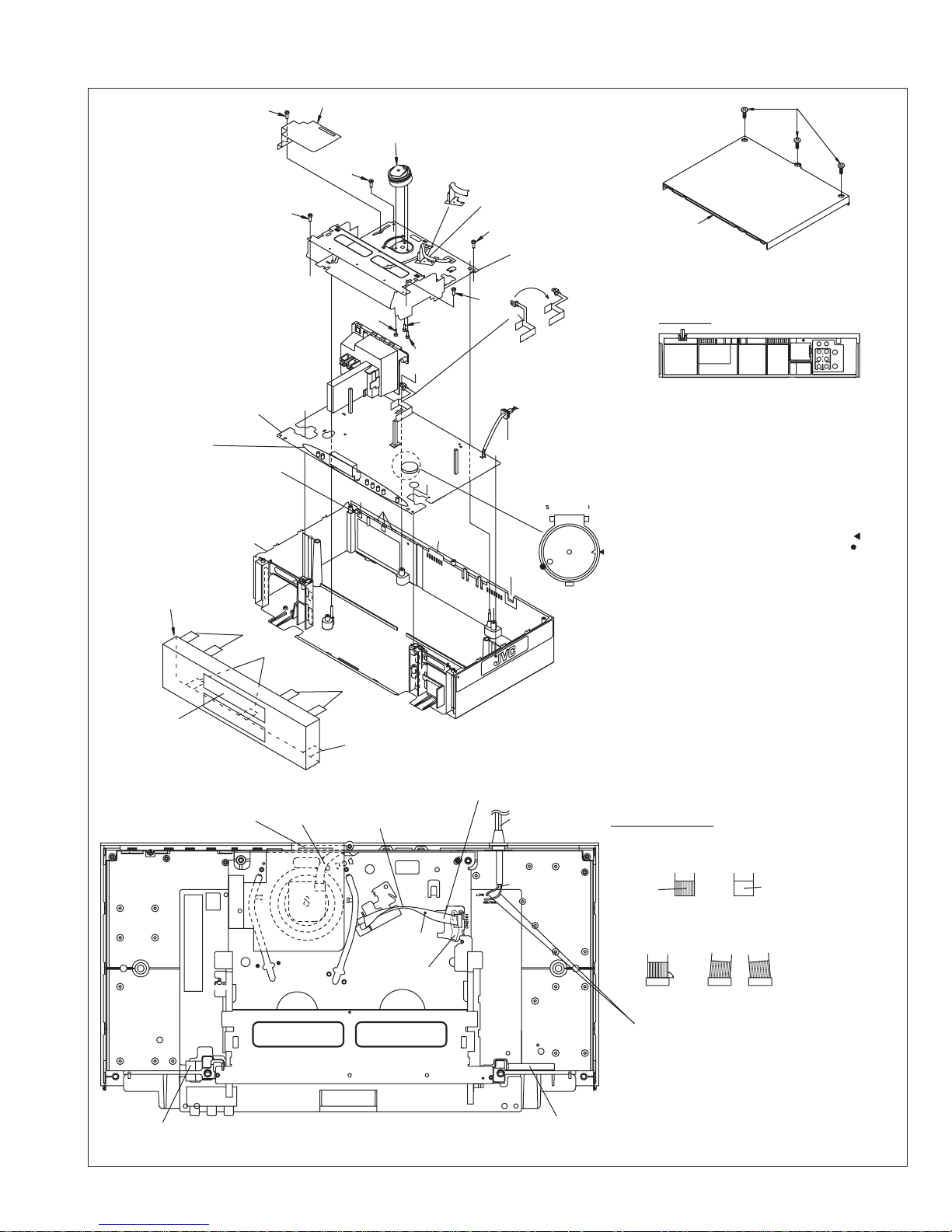
1.2 Removing the major parts
1.2.1 How to read the procedure table
This table shows the steps for disassembly of the externally
furnished parts and board assemblies. Reverse these steps
when re-assembling them.
<Example>
Step/
Loc No.
[1] Top cover, 1-3a
(1) (2) (3) (4) (5)
Part Name
Bracket 2(S1c)
Fig.
No.
----------------------------------------
Point Note
4(S1a),(S1b),3(L1a), <Note 1a>
2(SD1a),(P1a),(W1a),
CN1(WR1a),
(1) Order of steps in Procedure
When reassembling, perform the step(s) in the reverse order.
These numbers are also used as the identification (location) No. of
parts Figures.
(2) Part name to be removed or installed.
(3) Fig. No. showing procedure or part location.
(4) Identification of part to be removed, unhooked, unlocked,
released, unplugged, unclamped or unsoldered.
P= Spring, W= Washer, S= Screw, L= Locking tab, SD= Solder,
CN**(WR**)= Remove the wire (WR**) from the connector (CN**).
Note:
•
The bracketed ( ) WR of the connector symbol are assigned nos. in priority order and do not correspond to
those on the spare parts list.
(5) Adjustment information for installation
1.2.2 Disassembly/assembly method
Step/
Loc No.
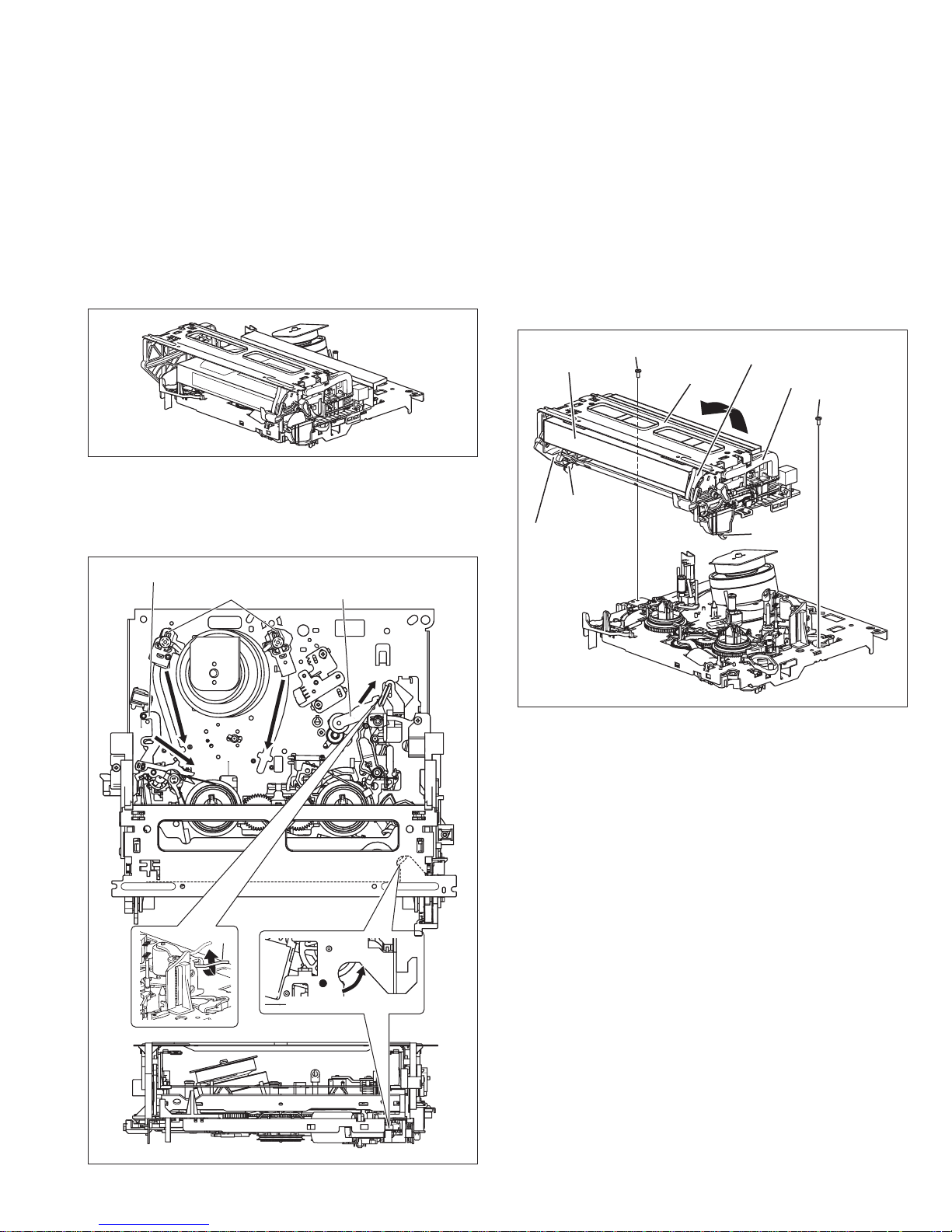
[1] Top cover 1-2-2d 3(S1a)
[2] Front panel assembly 1-2-2d 2(S2a), 4(L2a), 3(L2b) <Note 2a>
[3] Mechanism assembly 1-2-2d CN2001(WR3a), <Note 3a>
[4] Main board assembly 1-2-2d 2(L4a), (L4b), (L4c)
Part Name
(Drum Shield) (S3f), (L3a)
(Drum assembly) 1-2-2b CN1(WR3b),
Fig.
No.
1-2-2a
--------------------------
---------------------------
1-2-2c (S3c), (S3d), (S3e)
Point Note
(S3a), (S3b) <Note 3b>
<Note 3c>
<Note 3d>
<Note 2a>
• When reattaching the Front panel assembly, make sure that
the door opener of the Side frame (R) is lowered in position
prior to the reinstallation.
• When reattaching the Front panel assembly, pay careful atten-
tion to the switch lever of the Front panel assembly not to make
it touch the switch knob of the Main board assembly from the
side.
• When reattaching the Front panel assembly, lift the Cassette
door slightly.
Door
opener
Side
frame(R)
Switch
knob
Switch
lever
Fig. 1-2-2a
<Note 3a>
• Be careful not to damage the connector and wire etc. during
connection and disconnection.
• When connecting the flat wire to the connector, be careful with
the flat wire direction.
<Note 3b>
• When reattaching the Mechanism assembly , secure the screws
(S3a to S3b) in the order of a, b.
<Note 3c>
• When reattaching the Mechanism assembly, be sure to align
the phase of the Rotary encoder on the Main board assembly.
• When reattaching the Mechanism assembly, set the “Mechanism assembly mode” (See “Mechanism disassembly/assembly”).
• When reattaching the Mechanism assembly to the Main board
assembly , take care not to damage the sensors and switch on
the Main board assembly.
<Note 3d>
• When reattaching the Drum assembly, secure the screws (S3c
to S3e) in the order of c, d, e.
(S3d)
(S3c)
(S3e)
<Note 3c>
(S3d)
<NOTE>
Attach the Drum assembly appropriately,
since the installation state of the Drum assembly
influences the FM WAVEFORM LINEARITY
greatly.
(S3c)
(S3e)
HOOK
Fig. 1-2-2b
• When handling the drum assembly alone, hold it by the motor
or shaft. Be careful not to touch other parts, especially the video
heads. Also take care not to damage the connectors.
Shaft
Motor
Video heads
1-2
Fig. 1-2-2c
Page 9
(S3f)
(S2a)
Drum Shield
(S3a)
<Note 3b>
a
<Note 3d>
Drum assembly
<Note 3d>
(S3c)
FFC WIRE remove from the A/C HEAD
BASE and put MECHA UNIT on CHASSIS.
(WR3a)
<Note 3a>
(S3b)
<Note 3b>
Mechanism
assembly
<Note 3c>
b
a
b
(S3e)
<Note 3d>
(S3d)
<Note 3d>
(S2a)
"A"
The SHIELD CASE of the MAIN PWB
is bent from part A and MECHA
CHASSIS is put.
Top cover
NOTE) HANG THE HOOK OF THE
TOP COVER IN HOLD OF CHASSIS.
REAR SIDE
(S1a)
Main board
assembly
Switch knob
<Note 2a>
Hang the hook of the T.Board in
hole of CHASSIS.
Bottom chassis
Front panel
assembly
<Note 2a>
(L2a)
(L2b)
Cassette door
<Note 2a>
From CAPSTAN MDA
right side
(L3a)
a
(WR3b)
<Note 3a>
(L4c)
(L4b)
z
(L2a)
(L2b)
Wire is bent to rear side
Must confirm soldering condition as no soldering and
dry soldering at portion of Power cord lead on Main pwb
c
before attach Main pcb to Bottom chassis.
a
JS3001
(L3a)
c
b
z
Be careful to insert that will not be slanting,and will not be
pushing of PRESS LEVER.
NEUTRAL
(WHITE LINE)
NEUTRAL
(WHITE LINE)
For the prevention of the DRUM FPC damage.
When you attach the MECHA UNIT on B. CHASSIS.
Attach the MECHA UNIT after the positioning boss "z" of the
B. CHASSIS is matched to the positioning hole of the MECHA UNIT.
Accord the position of V gap on R. Encoder and PWB silk " ".
Accord the position of Boss on R. Encoder and PWB silk " ".
NOTE
1. Insert direction of FFC WIRE as follows.
electrode side
Right side Back side
supporting side
FW3001
(L4a)
Hang the hook of CHASSIS on the PWB.
Right side
PRESS LEVER
Hang the hook of CHASSIS on the PWB.
(L4a)
Fig. 1-2-2d
2. FFC WIRE and DRUM FPC WIRE should be insert as follows.
OK
90
CN
The power code not touch the power supply
PRIMARY side and the mechanics chassis.
NG
CN CN
1-3
Page 10
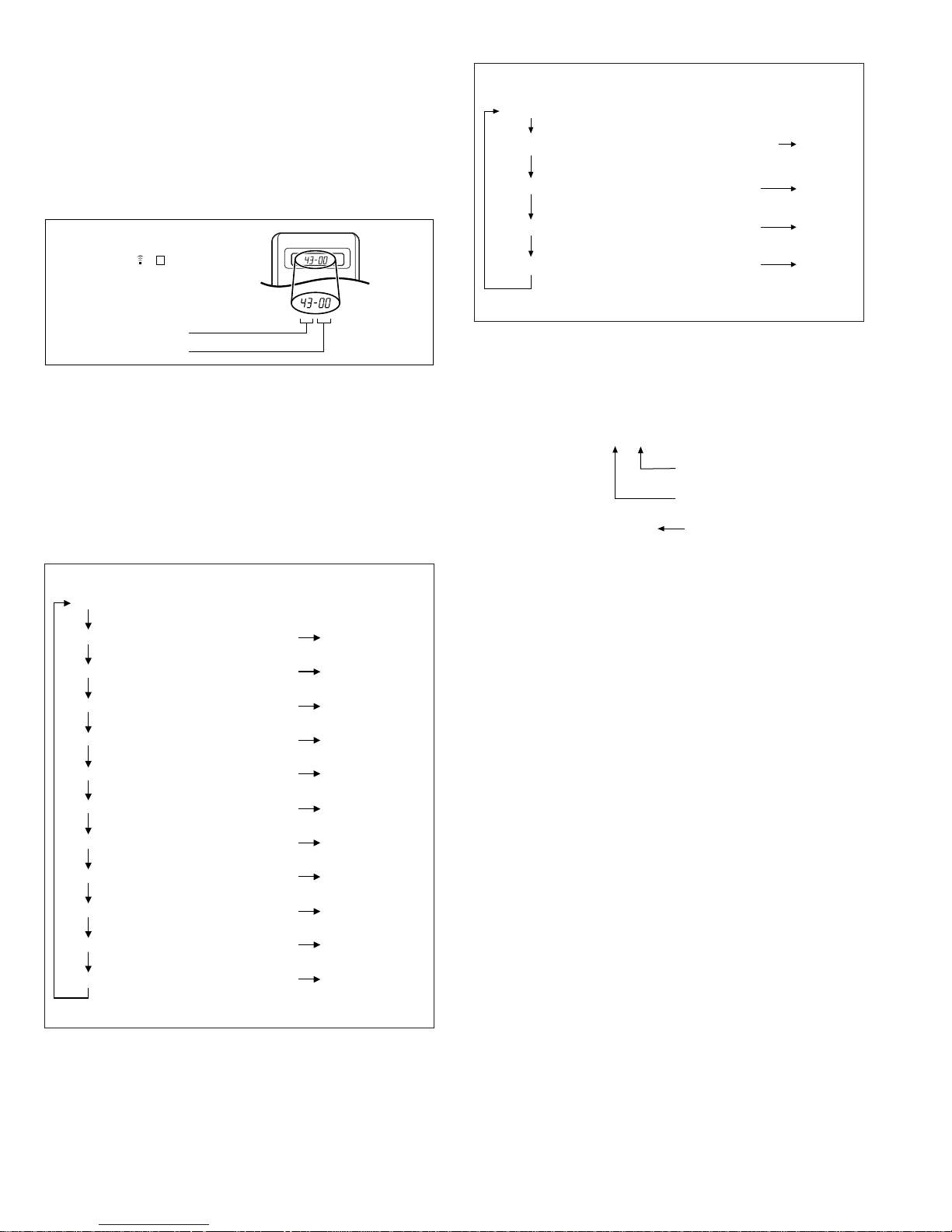
1.3 Emergency dispaly function
This unit saves details of the last two emergencies as the EMG
history and allows the status of the VCR and the mechanism
of each emergency to be shown both on the display and as
OSD information.
When using the emergency function, it is required to set the
VCR to the Jig RCU mode (the mode in which codes from the
Jig RCU can be received).
Jig RCU
[Data transmitting method]
Depress the “ ” ( 3 ) button
after the data code is set.
CUSTOM CODE
43: A CODE
DATA CODE
INITIAL MODE
0: 00 : 00
E:**:**
*1: *2 : 34
*5: *6 : *7
*8: *9 : *10
Normal display (Counter or clock)
EMG content display (E:Latest:Previous) See 1.3.4.
[EMG code display mode]
EMG detail information <1> display See 1.3.5.
[Deck and other mode display mode]
EMG detail information <2> display See 1.3.6.
[Cassette display mode]
EMG detail information <3> display See 1.3.7.
[Deck mode history dispaly mode]
Fig. 1-3-1b EMG dislay of FDP display model
Fig. 1-3a Jig RCU [PTU94023B]
1.3.1 Displaying the EMG information
The EMG detail of information can be displayed by transmitting the code "59" from the Jig RCU.
Note:
The EMG detail information <1><2> show the information on
•
the latest EMG.
It becomes “ – – : – – : – –” when there is no latest EMG
record.
0: 00
E: **
1E: **
1: *1
2: *2
3: 34
4: *5
5: *6
6: *7
7: *8
8: *9
9: *10
Normal display
EMG content display (Latest) See 1.3.4.
EMG content display (Previous) See 1.3.4.
EMG detail information <1> See 1.3.5.
[Deck operation mode]
EMG detail information <1> See 1.3.5.
[Mechanism operation mode]
EMG detail information <1> See 1.3.5.
[Mechanism sensor information and Mechanism mode position]
EMG detail information <2> See 1.3.6.
[Type of the cassette tape in use <1>]
EMG detail information <2> See 1.3.6.
[Winding position of the cassette tape in use]
EMG detail information <2> See 1.3.6.
[Type of the cassette tape in use <2> (Winding area)]
EMG detail information <3> See 1.3.7.
[Previous deck operation mode]
EMG detail information <3> See 1.3.7.
[The deck operation mode of the one before the last]
EMG detail information <3> See 1.3.7.
[The deck operation mode of the one prior to one above]
Fig. 1-3-1a EMG display of 7segment LED display model
<Reference> EMG display of FDP display mode
(1) Transmit the code “59” from the Jig RCU.
The FDP shows the EMG content in the form of “E:**:**”.
<Example 1> E : 01 : 03
Previous EMG
Latest EMG
<Example 2> E : –– : ––
No EMG record
(2) Transmit the code “59” from the Jig RCU again.
The FDP shows the EMG detail information <1> in the form
of “ *1 : *2 : 34 ”.
*1 : Deck operation mode at the moment of EMG
*2 : Mechanism operation mode at the moment of EMG
3– : Mechanism sensor information at the moment of
EMG
–4 : Mechanism mode position at the moment of EMG
(3) Transmit the code “59” from the Jig RCU once again.
The FDP shows the EMG detail information <2> in the form
of “ *5 : *6 : *7 ”.
*5 : Type of the cassette tape in use <1> .
*6 : Winding position of the cassette tape in use
*7 : Type of the cassette tape in use <2> (Winding area)
(4) Transmit the code “59” from the Jig RCU once again.
The FDP shows the EMG detail information <3> in the form
of “*8 : *9 : *10”.
* 8 : Previous deck operation mode at the moment of
EMG
*9 : The deck operation mode of the one before the last
at the moment of EMG
* 10 : The deck operation mode of the one prior to one
above at the moment of EMG
(5) Transmit the code “59” from the Jig RCU once again to re-
set the display.
1.3.2 Clearing the EMG history
(1) Display the EMG history.
(2) Transmit the code “36” from the Jig RCU.
(3) Reset the EMG display.
1-4
Page 11

1.3.3 Details of the OSD display in the EMG display mode
AA BB CC
DD EE FF
GGGG HHHH
I I JJJJ
KKKK LLLL MMMM
ROM No.
<Display>
** h
********
Encoder data
(See Mechanism mode sequence.)
Remote pause
End sensor
Start sensor
Cassette tab present = 1
Cassette tab broken = 0
*DD: Sensor information details
AA : Key code (JVC code)
BB : Deck operation mode (See EMG detail information <1>.)
CC :
Mechanism operation mode (See EMG detail information <1>.)
DD : Sensor information (See sensor information details.)
EE : Capstan motor speed (Search, double speed)
F F : Tracking value
GGGG: Cassette tape type <2>, 16 bits.
(See EMG detail information <2>.)
HHHH : Supply reel winding diameter data
I I : Capstan motor speed (FF/REW, double speed)
JJJJ: Tape speed data, lower 8 bits.
KKKK : General data display area
LLLL : General data display area
MMMM : General data display area
LSA
LSB
LSC
LSD
Encoder output = Low
or
Trerminal - GND = SHORT
Encoder output = High
or
Trerminal - GND = OPEN
Mechanism mode - Encoder data
1110
9876
543
21
Mechanism mode sequence
No. Position Encoder data
EJECT 0 h = 0000
EJECT1 1 h = 0001
EJECT2 2 h = 0010
ULSTOP 3 h = 0011
UPPER 4 h = 0100
ONSTOP(PLAY) 5 h = 0101
FWD/SS 6 h = 0110
REV/SS 7 h = 0111
OFFSTOP 8 h = 1000
FFREW-BRAKE 9 h = 1001
FFREW A h = 1010
MIDDLE F h = 1111
1
2
3
4
5
6
7
8
9
10
11
12
LSD
LSC
LSB
LSA
GND
12345
During the EMG display, the OSD shows the data on the deck
mode, etc. The details of the display contents are as follows.
Notes:
The display is variable depending on the part No. of the
•
System Control microcomputer (IC3001) built into the
VCR. In the following, refer to the figure carrying the same
two characters as the top two characters of the part
number of your IC.
•
The sensor information in the OSD display contents is par-
tially different from the mechanism sensor information in
EMG detail information <1>.
[For MN* only]
AA BB CC DD EE
FF GG HH I I J J
KK LL MM NN OO
PP QQ RR SS TT
UU VV WW XX YY
[For *HD only]
AA : Deck operation mode (See EMG detail information <1>.)
BB :
Mechanism operation mode (See EMG detail of information <1>.)
CC : Mechanism transition flag
DD : Capstan motor control status
EE : Loading motor control status
F F : Sensor information (See sensor information details.)
GG : Capstan motor speed
HH : Key code (JVC code)
I I : Supply reel winding diameter data, higher 8 bits.
J J : Supply reel winding diameter data, lower 8 bits.
KK : Mechanism sensor information & mechanism mode position
(See EMG detail of information <1>.)
L L : Tape speed data, higher 8 bits.
MM : Tape speed data, lower 8 bits.
NN : Cassette tape type <2>, higher 8 bits.
(See EMG detail of information <2>.)
OO : Cassette tape type <2>, lower 8 bits.
(See EMG detail of information <2>.)
PP : General data display area
YY : General data display area
*FF: Sensor information details
<Display>
** h
********
Cassette tab present = 1
Encoder data
(See Mechanism mode sequence.)
Cassette tab broken = 0
End sensor
Cassette absent = 1
Cassette present = 0
Start sensor
[For both MN*/HD*]
1-5
Page 12
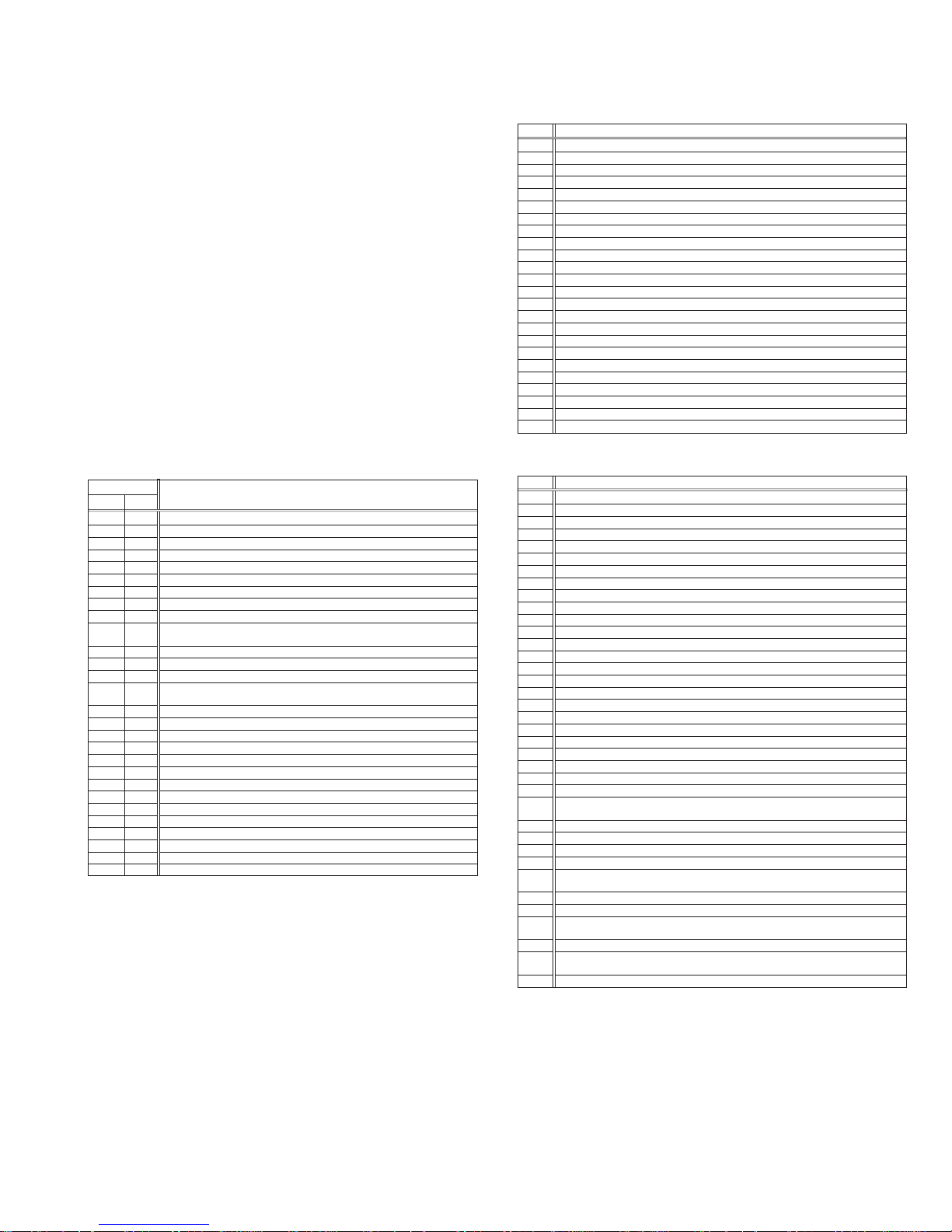
1.3.4 EMG content description
Note:
EMG contents “E08/E09” are for the model with Dynamic Drum (DD).
FDP CONTENT CAUSE
E01: Loading EMG
Unloading EMG
E02:
E03: Take Up Reel
Pulse EMG
E04: Drum FG EMG
E05: Cassette Eject
EMG
E06: Capstan FG
EMG
E07:SW Power
Short-Circuit
EMG
E08:
DD Initialized
(Absolute
Position
Sensor) EMG
E09: DD FG EMG
E0A: Supply Reel
Pulse EMG
EU1:
Head clog warning
history
1-6
If the mechanism mode does not change to the next mode within 4 seconds after the loading motor starts rotating in the loading direction, while
the mechanism is in the after-loading position (with the tape up against
the pole base), [E:01] is identified and the power is switched OFF.
However, if the tape loading is not completed within 4 seconds after
the loading motor starts rotating in the loading direction, the tape is
simply unloaded and ejected. No EMG data is recorded in this case.
When the mechanism mode cannot be changed to another mode
even when the loading motor has rotated for more than 4 seconds in the unloading direction, [E:02] is identified and the power
is turned off.
When the falling edje of the take-up reel pulse has not been generated for more than 4 seconds in the capstan rotating mode,
[E:03] is identified, the pinch rollers are turned off and stopped,
and the power is turned off. In this case, however, the mechanism should be in position after tape loading. Note that the reel
EMG is not detected during Slow/Frame advance operations.
When the drum FG pulse has not been input for more than 3 seconds in the drum rotating mode, [E:04] is identified, the pinch rollers are turned off and stopped, and the power is turned off.
If the cassette does not reach the eject position within about 0.7
seconds after the cassette housing has started the cassette ejection operation, [E:05] is identified, the drive direction is reversed
to load the tape, the mode is switched to STOP mode with the
pinch roller OFF, and the power is switched OFF.
During the cassette insertion process, the drive direction is reversed
and the cassette is ejected if the tape is not up against the pole
base within about 3 seconds after the start of the cassette pullingin operation. If the cassette does not reach the eject position within
about 0.7 seconds after the drive mode reversal operation, [E:05]
is identified and the power is switched OFF immediately.
When the capstan FG pulse has not been generated for more
than 1 second in the capstan rotating mode, [E:06] is identified,
the pinch rollers are turned off and stopped, and the power is
turned off.However, the capstan EMG is not detected in SLOW/
STILL modes.
Note that, if the part number of the System Control IC begins with
“MN” or “M3”, the capstan EMG is not detected even during the
FF/REW operation.
When short-circuiting of the SW power supply with GND has lasted
for 0.5 second or more, [E:07] is identified, all the motors are
stopped and the power is turned off.
When DD tilting does not complete in 4 seconds, [E:08] is identified, the tilt motor is stopped and the power is turned off.
When the DD FG pulse is not generated within 2.5 seconds, [E:09]
is identified, the tilt motor is stopped and the power is turned off.
When the falling edge of the supply reel pulse has not been generated for more than 10 seconds in the capstan rotating mode,
[E:0A] is identified and the cassette is ejected (but the power is
not turned off). In this case, however, the mechanism should be
in the position after tape loading (with the tape up against the pole
base). Also note that the reel EMG is not detected during Slow/
Frame advance operations.
Presupposing the presence of the control pulse output in the PLAY mode, when the value obtained by mixing the two V.FM output channels (without regard
to the A.FM output) has remained below a certain threshold level for more than 10 seconds, [E:U1] is identified and recorded in the emergency history.
During the period in which the head clog is detected, the FDP shows "U:01" and the OSD repeats the “3 seconds of warning display” and the “7 seconds of
noise picture display” alternately.
EMG code : “E:C1” or “E:U1” / FDP : “U:01” / OSD : “Try cleaning tape.” or “Use cleaning cassette.”
The head clog warning is reset when the above-mentioned threshold has been exceeded for more than 2 seconds or the mode is changed to another mode
than PLAY.
1. The mechanism is locked in the middle of the mode transition during a tape loading operation.
The mechanism overruns during the tape loading operation because the SYSCON cannot recognize
2.
the mechanism mode normally. This problem is due to a cause such as a rotary encoder failure.
3.
Power is not supplied to the loading MDA. (M12V/Vcc/Vref/ICP are disconnected in
the middle.)
1.
The mechanism is locked in the middle of mode transition.
2.
Without an eject signal being sent from the SYSCON, unloading is attempted (i.e. Ejection is attempted while the tape is still inside the mechanism.) because the SYSCON
cannot recognize the mechanism mode normally. This is due to a cause such as a
rotary encoder failure. (Mechanism position: UPPER)
3.
Power is not supplied to the loading MDA. (M12V/Vcc/Vref/ICP are disconnected in the middle.)
1.
The take-up reel pulse is not generated in the FWD transport modes (PLAY/FWD
SEARCH/FF, etc.) because;
1)The idler gear is not meshed with the take-up reel gear because the mechanism mal-
functions for some reason.
The idler gear is meshed with the take-up reel gear, but incapable of winding due to
2)
too large mechanical load (abnormal tension);
3)The reel is rotating normally but an FG pulse is not generated due to the take-up reel
sensor failure.
2.
The supply reel pulse is not generated in the REV transport modes (REV SEARCH/
REW, etc.) because;
1) The idler gear is not meshed with the supply reel gear because the mechanism mal-
functions for some reason.
2) The idler gear is meshed with the supply reel gear, but incapable of winding due to
too large a mechanical load (abnormal tension);
3) The reel rotates normally but the FG pulse is not generated due to a supply reel
sensor failure.
3.
Power(SW5V) is not supplied to the reel sensor on the tape winding side.
1.
The drum could not start or the drum rotation has stopped due to too large a load on
the tape, because;
1) The tape tension is abnormally high;
The tape is damaged or a foreign object (grease, etc.) adheres to the tape.
2)
2.
The drum FG pulse did not reach the System controller CPU because;
1) The signal circuit is disconnected in the middle;
2) The FG pulse generator (hall device) of the drum is faulty.
3.
The drum control voltage (DRUM CTL V) is not supplied to the MDA.
4.
Power (M12V) is not supplied to the drum MDA.
1.
The cassette cannot be ejected due to a failure in the drive mechanism of the housing.
2.
When the housing load increases during ejection, the loading motor is stopped because
of lack of headroom in its drive torque.
Housing load increasing factors: Temperature environment (low temperature, etc.),
mechanism wear or failure.
3.
The sensor/switch for detecting the end of ejection are not functioning normally.
4.
The loading motor drive voltage is lower than specified or power (M12V) is not supplied to the motor (MDA).
5.
When the user attempted to eject a cassette, a foreign object (or perhaps the user's
hand) was caught in the opening of the housing.
1.
The capstan could not start or the capstan rotation has stopped due to too large a load
on the tape, because;
1) The tape tension is abnormally high (mechanical lock);
2) The tape is damaged or a foreign object (grease, etc.) is adhered to the tape (occur-
rence of tape entangling, etc.).
2.
The capstan FG pulse did not reach the System controller CPU because;
1) The signal circuit is disconnected in the middle;
2) The FG pulse generator (MR device) of the capstans is faulty.
3.
The capstan control voltage (CAPSTAN CTL V) is not supplied to the MDA.
4.
Power (M12V, SW5V) are not supplied to the capstan MDA.
1.
The SW 5 V power supply circuit is shorted with GND.
2.
The SW 12 V power supply circuit is shorted with GND.
1. The absolute value sensor is defective. (The soldered parts have separated.)
2. The pull-up resistor at the absolute sensor output is defective. (The soldered parts have separated.)
3. Contact failure or soldering failure of the pins of the connector (board-to-board) to the absolute value
sensor.
The absolute value sensor data is not sent to the System Controller CPU.
4.
1. The FG sensor is defective. (The soldered parts have separated.)
2. The pull-up resistor at the FG sensor output is defective. (The soldered parts have separated.)
3. Contact failure or soldering failure of the pins of the connector (board-to-board) to the FG sensor.
4. The power (5V) to the sensor is not supplied. (Connection failure/soldering failure)
5. The FG pulse is not sent to the System Controller CPU.
The tilt motor is defective. (The soldered parts have separated.)
6.
7. The drive power to the tilt motor is not supplied. (Connection failure/soldering failure)
8. The tilt motor drive MDA - IC is defective.
9. Auto-recovery of the DD tilting cannot take place due to overrun.
The supply reel pulse is not generated in the FWD transport mode (PLAY/FWD
1.
SEARCH/FF, etc.) because;
1) PLAY/FWD or SEARCH/FF is started while the tape in the inserted cassette is cut in
the middle;
2) A mechanical factor caused tape slack inside and outside the supply reel side of the
cassette shell. In this case, the supply reel will not rotate until the tape slack is removed by the FWD transport, so the pulse is not generated until then;
3) The reel is rotating normally but the FG pulse is not generated due to a supply reel
sensor failure.
2.
The take-up reel pulse is not generated in the REV transport mode (REV SEARCH/
REW, etc.).
1) REV SEARCH/REW is started when the tape in the inserted cassette has been cut
in the middle;
2) A mechanical factor caused tape slack inside and outside the take-up reel side of
the cassette shell. In this case, the supply reel will not rotate until the tape slack is
removed by the REV transport, so the pulse will not be generated until that time;
3) The reel is rotating normally but the FG pulse is not generated due to a take-up reel
sensor failure.
3.
The power (SW 5V) to a reel sensor is not supplied.
Table 1-3-4a
Page 13
1.3.5 EMG detail information <1>
The status (electrical operation mode) of the VCR and the status
(mechanism operation mode/sensor information) of the mechanism
in the latest EMG can be confirmed based on the figure in EMG
detail information <1> .
[FDP/OSD display]
*1 : *2 : 34
*1 : Deck operation mode at the moment of EMG
*2 : Mechanism operation mode at the moment of EMG
3– : Mechanism sensor information at the moment of EMG
–4 : Mechanism mod
e position at the moment of EMG
Note:
For EMG detailed information <1>, the content of the code
•
that is shown on the display (or OSD) differs depending on
the parts number of the system control microprocessor
(IC3001) of the VCR. The system control microprocessor parts
number starts with two letters, refer these to the corresponding table.
*2 : Mechanism operation mode
[Table of MN*]
Display
00 Command standby (No command to be executed)
01 Immediate Power OFF after EMG occurrence
02 Loading from an intermediate position during mechanism initialization
03 Unloading due to EMG occurrence during mechanism initialization
04 Ejecting cassette (ULSTOP to EJECT)
05 Inserting cassette (EJECT to ULSTOP)
06 Loading tape (ULSTOP to PLAY)
07 Unloading tape (PLAY to ULSTOP)
08 Transition from pinch roller ON to STOP
09 Transition from pinch roller OFF to STOP (PLAY to OFFSTOP)
0A Transition from pinch roller OFF to STOP at power OFF
0B Transition from pinch roller ON to STOP at power ON
0C Transition to PLAY
0D Transition to Search FF
0E Transition to REC
0F Transition to FWD STILL/SLOW
10 Transition to REV STILL/SLOW
11 Transition to Search REV
12 Transition from FF/REW to STOP
13 Transition to FF
14 Transition to REW
15 Tape end detection processing during loading
16 Short FWD/REV at tape sensor ON during unloading
17 Transition to FF/REW brake mode
Mechanism operation mode
*1 : Deck operation mode
[Common table of MN* and HD]
Display
MN* HD*
00 - Mechanism being initialized
01 00 STOP with pinch roller pressure off (or tape present with P.OFF)
02 01 STOP with pinch roller pressure on
03 - POWER OFF as a result of EMG
04 04 PLAY (Normal playback)
0C 0E REC
10 11 Cassette ejected
20 22 FF
21 - Tape fully loaded, START sensor ON, short FF
22 - Cassette identification FWD SEARCH before transition to FF (SP
24 26 FWD SEARCH (variable speed) including x2-speed
2C 2E INSERT REC
40 43 REW
42 - Cassette identification REV SEARCH before transition to REW (SP
44 47 REV SEARCH (variable speed)
4C 4C AUDIO DUB
6C 6E INSERT REC (VIDEO + AUDIO)
84 84 FWD STILL / SLOW
85 85 REV STILL / SLOW
8C 8F REC PAUSE
8D - Back spacing
8E - Forward spacing (FWD transport mode with BEST function)
AC AF INSERT REC PAUSE
AD - INSERT REC back spacing
CC CD AUDIO DUB PAUSE
CD - AUDIO DUB back spacing
EC EF INSERT REC (VIDEO + AUDIO) PAUSE
ED - INSERT REC (VIDEO + AUDIO) back spacing
x7-speed)
x7-speed)
Deck operation mode
[Table of HD*]
Display
00 STOP with pinch roller pressure off
01 STOP with pinch roller pressure on
02 U/L STOP (or tape being loaded)
04 PLAY (Normal playback)
05 PLAY (x1-speed playback using JOG)
0E REC
11 Cassette ejected
22 FF
26 FWD SEARCH (variable speed) including x2-speed
2E INSERT REC
43 REW
47 REV SEARCH
4C AUDIO DUB
6E INSERT REC (VIDEO + AUDIO)
84 FWD STILL/SLOW
85 REV STILL/SLOW
8F REC PAUSE
AF INSERT REC PAUSE
C7 REV SEARCH (x1-speed reverse playback using JOG)
CD AUDIO DUB PAUSE
EF INSERT REC (VIDEO + AUDIO) PAUSE
F0 Mechanism being initialized
F1 POWER OFF as a result of EMG
F2 Cassette being inserted
F3 Cassette being ejected
F4 Transition from STOP with pinch roller pressure on to STOP with pinch roller
pressure off
F5 Transition from STOP with pinch roller pressure on to PLAY
F6 Transition from STOP with pinch roller pressure on to REC
F7 Cassette type detection SEARCH before FF/REW is being executed
F8 Tape being unloaded
F9 Transition from STOP with pinch roller pressure off to STOP with pinch roller
pressure on
FA Transition from STOP with pinch roller pressure off to FF/REW
FB Transition from STOP with pinch roller pressure off to REC.P (T.REC,etc.)
FC Transition from STOP with pinch roller pressure off to cassette type detec-
tion SEARCH
FD Short REV being executed after END sensor on during unloading
FE Tension loosening being executed after tape loading (STOP with pinch roller
pressure on)
FF Tape being unloaded
Mechanism operation mode
1-7
Page 14
3– : Mechanism sensor information
[Common table of MN* and HD*]
Display
0- Tab broken ON ON ON
1- Tab broken ON
2- Tab broken ON
3- Tab broken ON OFF
4- Tab present ON
5- Tab present
6- Tab present OFF
7- Tab present OFF
8- Tab broken ON ON
9- Tab broken ON
A- Tab broken
B- Tab broken OFF
C- Tab present ON
D- Tab present
E- Tab present OFF
F- Tab present OFF
REC safety SW
Tab broken = 0 S ensor ON = 0 Sensor ON = 0
Tab present = 1 sensor OFF = 1 S ensor OFF = 1
Mechanism sensor information
Start sensor End sensor
OFF
OFF
OFF
ON
ON
OFF
OFF
OFF
OFF
OFF
OFF
OFF OFF
ON
ON
ON
ON
Mechansim
position sensor
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
*5 : Cassette tape type <1>
Display Cassette tape type <1>
00 Cassette type not identified
16
Large reel/small reel (T-0 to T-15/T-130 to T-210) not classified
82 Small reel, thick tape (T-120) identified/thin tape (T-140) identified
84 Large reel (T-0 to T-60) identified
92
Small reel, thick tape (T-130) identified/thin tape (T-160 to T-210) identified
93
Small reel, thick tape/C cassette (T-0 to T-100/C cassette) not classified
C3
Small reel, thick tape/C cassette (T-0 to T-100/C cassette) being classified
D3
Small reel, thick tape/C cassette (T-0 to T-100/C cassette) being classified
E1 C cassette, thick tape (TC-10 to TC-20) identified
E2 Small reel, thick tape (T-0 to T-100) identified
E9 C cassette, thin tape (TC-30 to TC-40) identified
C cassette, thick tape/thin tape (TC-10 to TC-40) not classified
F1
Notes:
Cassette tape type
•
<1>
is identified a few times during mode transition and the identification count is variable depending on the cassette tape type. If an EMG occurs in the middle of identification, the
cassette tape type may not be able to be identified.
•
If other value than those listed in the above table is displayed,
the cassette tape type is not identified.
–4 : Mechanism mode position
[Common table of MN* and HD*]
Mechanism
sensor
information
Display
Deck operation mode
-0 Not established
-1 EJECT EJECT position
-2 EJECT-EJECT1 Intermodal position
-3 EJECT1 EJECT1 position
-4 EJECT1-EJECT2 Intermodal position
-5 EJECT2 EJECT2 position
-6 EJECT2-ULSTOP Intermodal position
Even number
(0, 2, 4, 6, 8,
A, C, E)
-7 ULSTOP ULSTOP position
-8 ULSTOP-UPPER Intermodal position
-9 UPPER Loading (unloading) tape
-A UPPER-ONSTOP Intermodal position
-B ONSTOP PLAY position
-C PLAY-FWD/SS Intermodal position
-D FWD/SS
FWD (FWD Still/Slow) position
-E FWD/SS-REV Intermodal position
-F REV
REV (REV Still/Slow) position
-0 REV-OFFSTOP Intermodal position
-1 OFFSTOP Pinch roller OFF position
Odd number
(1, 3, 5, 7, 9,
B, D, F)
-2
OFFSTOP-FFREWB
Intermodal position
-3 FFREWB FF/REW Brake position
-4 FFREWB-FFREW Intermodal position
-5 FFREW FF/REW position
1.3.6 EMG detail information <2>
The type of the cassette tape and the cassette tape winding position can be confirmed based on the figure in EMG detail information <2> .
[FDP/OSD display]
*5 : *6 : *7
*5 : Type of the cassette tape in use <1>
*6 : Winding position of the cassette tape in use
*7 : Type of th
e cassette tape in use
<2>
(Winding area)
Note:
EMG detail information <2> is the reference information
•
stored using the remaining tape detection function of the cassette tape. As a result, it may not identify cassette correctly
when a special cassette tape is used or when the tape has
variable thickness.
*6 : Cassette tape winding position
The cassette tape winding position at the moment of EMG is displayed by dividing the entire tape (from the beginning to the end) in
21 sections using a hex number from “00” to “14”.
“00” : End of winding
“14” : Beginning of winding
“FF” : Tape position not identified
*7 : Cassette tape type <2> (Winding area)
Display
00
04 - 08
05 - 06
05 - 0C
06 - 0C
06 - 0C
07 - 08
09 - 0B
0C - 0D
0D - 0F
0E - 10
10 - 12
10 - 13
11 - 14
12 - 14
13 - 14
13 - 14
13 - 14
13 - 14
15 - 16
16 - 17
17 - 18
19 - 1B
Cassette tape type <2>
Cassette type not identified
C cassette, thick tape TC-10
Small reel, thick tape T-20
C cassette, thick tape TC-20P
C cassette, thin tape TC-40
C cassette, thin tape TC-30
Small reel, thick tape T-40
Small reel, thick tape T-60
Small reel, thick tape T-80(DF-160)
Small reel, thick tape T-90(DF-180)
Small reel, thick tape T-100
Small reel, thin tape T-140
Small reel, thick tape T-120(DF-240)
Small reel, thick tape T-130
Small reel, thin tape T-160
Small reel, thin tape T-210(DF-420)
Small reel, thin tape T-180(DF-360)
Small reel, thin tape T-168
Small reel, thick tape DF-300
Large reel T-20
Large reel T-30
Large reel T-40
Large reel T-60
(Reference) Word data
(Beginning) (End)
(0497 - 0506) (0732 - 0858)
(05A9 - 0661)
(0599 - 05FF) (0AA1 - 0C07)
(0623 - 063D) (0C41 - 0CC3)
(0611 - 0638) (0C0C - 0CB2)
(07CC - 08E5)
(09FD - 0B78)
(0C20 - 0DFC)
(0D31 - 0F3E)
(0E43 - 107F)
(10E1 - 120C)
(1073 - 1313)
(1185 - 1429)
(12D3 - 141F)
(1373 - 14C3)
(1357 - 14C0)
(1395 - 14EE)
(13A8 - 14CE)
(1536 - 1618)
(1647 - 175A)
(1759 - 189C)
(1989 - 1B2F)
Note:
The values of cassette tape type <2> in the above table are
•
typical values with representative cassette tapes.
1.3.7 EMG detail information <3>
Three deck operation modes preceding the deck operation
mode in which the EMG occurs may be confirmed based on
the figures in the EMG information detail <3>. For the contents
of the displayed information, see the table "Deck operation
mode" in section "1.3.5 EMG detail information <1>".
1-8
Page 15
1.4 Service position
This unit has been designed so that the Mechanism and Main
board assemblies can be removed together from the chassis
assembly. Before diagnosing or servicing the circuit boards,
take out the major parts from the chassis assembly.
1.4.1 How to set the “Service position”
(1) Refer to the disassembly procedure and perform the dis-
assembly of the major parts before removing the Mechanism assembly.
(2) Remove the screws that fix the Mechanism assembly to the
Chassis assembly. If any other screws are used to fix the
boards, remove them also.
(3) Remove the combined Mechanism and Main board assem-
blies.
(4) If any other major parts are used, remove them also.
(5) Connect the wires and connectors of the major parts that
have been removed in steps (1) to (4). (Refer to Fig. 1-2-2d.)
(6) Place the combined Mechanism, Main board and other
board assemblies upside down.
(7) Insert the power cord plug into the power outlet and then
proceed with the diagnostics and servicing of the board as-
sembly.
Notes:
Before inserting the power cord plug into the power out-
•
let, make sure that none of the electrical parts are able to
short-circuit between the workbench and the board assembly.
•
For the disassembly procedure of the major parts and details of the precautions to be taken, see “1.2 Removing
the major parts”.
•
If there are wire connections from the Main board and
Mechanism assemblies to the other major parts, be sure
to remove them (including wires connected to the major
parts) first before performing step (2).
•
When carrying out diagnosis and repair of the Main board
assembly in the “Service position”, be sure to ground both
the Main board and Mechanism assemblies. If they are improperly grounded, there may be noise on the playback
picture or FDP counter display may move even when the
mechanism is kept in an inoperative status.
•
In order to diagnose the playback or recording of the cassette tape, set the Mechanism assembly to the required
mode before placing it upside down. If the mechanism
mode is changed (including ejection) while it is in an upside down position the tape inside may be damaged.
•
For some models, the mechanism and board assemblies
are attached by connectors only. When carrying out a diagnosis or repair of the boards in the “Service position”,
make sure that the connectors are not disconnected.
1.5 Jig RCU mode
This unit uses the following two modes for receiving remote
control codes.
1) User RCU mode : Ordinary mode for use by the user.
2) Jig RCU mode : Mode for use in production and servicing.
When using the Jig RCU, it is required to set the VCR to the
Jig RCU mode (the mode in which codes from the Jig RCU
can be received). As both of the above two modes are stored
in the EEPROM, it is required to set the VCR back to the User
RCU mode each time that an adjustment is made or to check
that the necessary operations have been completed. These
modes can be set by the operations described below.
1.5.1 Setting the Jig RCU mode
(1) Unplug the power cord plug from the power outlet.
(2) Press and hold the “REC” and “PAUSE” buttons on the VCR
simultaneously, while plugging the power cord plug into the
power outlet.
When the VCR is set to the Jig RCU mode, the symbols
( “ : ” ) in the time display of the FDP are turned off.
1.5.2 Setting the User RCU mode
(1) Turn off the power.
(2) Press the “REC” and “PAUSE” buttons of the VCR simulta-
neously. Alternatively, transmit the code “80” from the Jig
RCU.
1.6 Mechanism service mode
This model has a unique function to enter the mechanism into
every operation mode without loading of any cassette tape. This
function is called the “Mechanism service mode”.
1.6.1 How to set the “Mechanism service mode”
(1) Set the VCR to the Jig RCU mode (the mode in which codes
from the Jig RCU can be received).
(2) Transmit the code “E5” from the Jig RCU.
(3) Release the lug of the Cassette holder and then slide the
Cassette holder toward the direction where the Cassette
holder is loaded by manually.
(4) The cassette holder lowers and, when the loading has com-
pleted, the mechanism enters the desired mode.
When the VCR is set to the Mechanism service mode, the
symbols (“Timer”) in the FDP (LED) are blinked.
1.6.2 How to exit from the "Mechanism service mode"
(1) Unplug the power cord plug from the power outlet.
TP111
D.FF
TP106
TP4001
PB.FM
CTL.P
TP2253
A.PB.FM
Fig. 1-4-1a
CP4001
CP3001
Main board
assembly
VR4028
SWITCHING POINT ADJ.
1-9
Page 16
1.7 Maintenance and inspection
1.7.1 Cleaning
Regular cleaning of the transport system parts is desirable but
practically impossible. So make it a rule to carry out cleaning
of the tape transport system whenever the machine is serviced.
When the video head, tape guide and/or brush get soiled, the
playback picture may appear inferior or at worst disappear, resulting in possible tape damage.
Note:
Absolutely avoid sweeping the upper drum vertically as
•
this will cause damage to the video head.
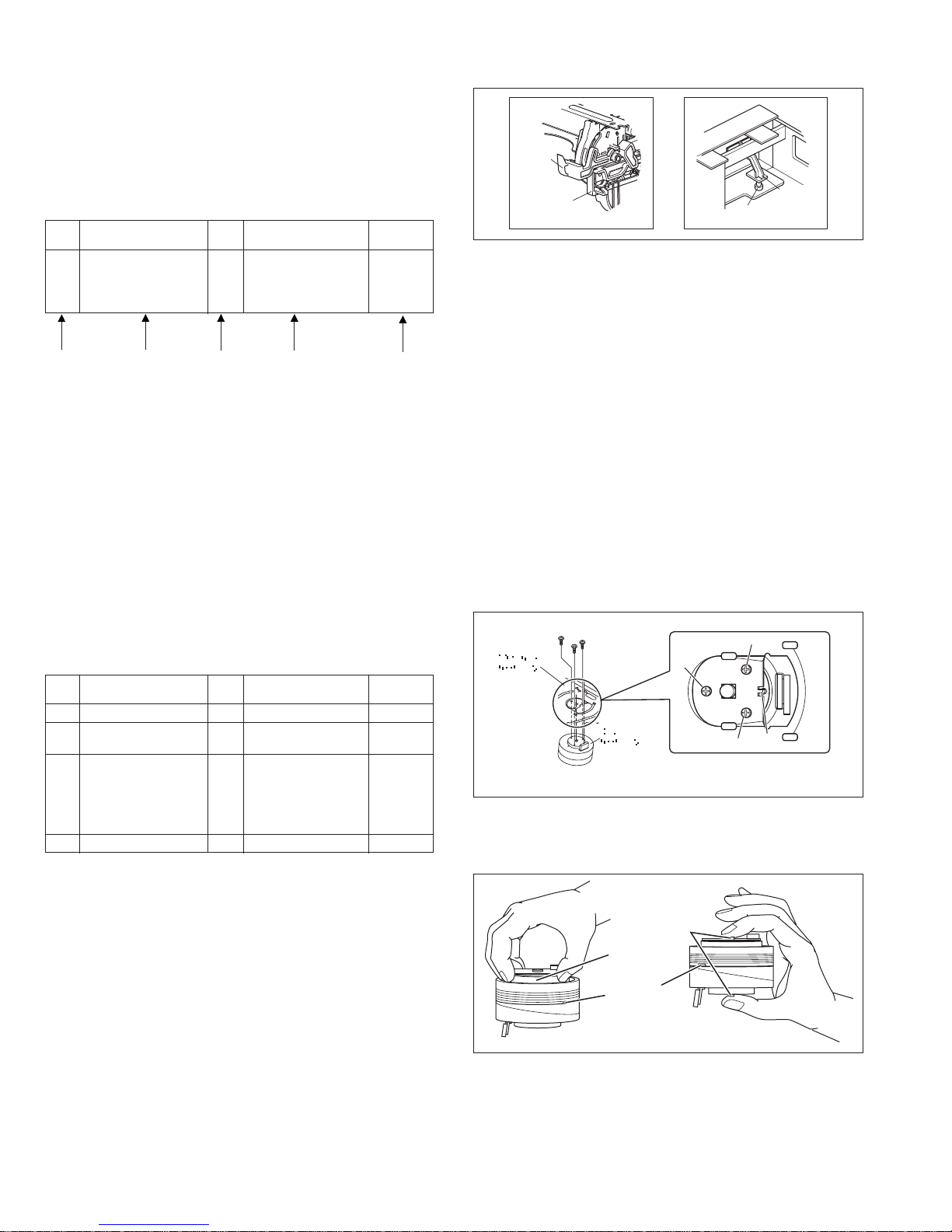
(1) When cleaning the upper drum (especially the video head),
soak a piece of closely woven cloth with alcohol and while
holding the cloth onto the upper drum by the fingers, turn
the upper drum counterclockwise.
(2) To clean the parts of the tape transport system other than
the upper drum, use a piece of closely woven cloth or a
cotton swab soaked with alcohol.
(3) After cleaning, make sure that the cleaned parts are com-
pletely dry before using the cassette tape.
A/C head
Video heads
Fig. 1-7-1a
1.7.2 Lubrication
With no need for periodical lubrication, you have only to lubricate new parts after replacement. If any oil or grease on contact parts is soiled, wipe it off and newly lubricate the parts.
Note:
See the “mechanism assembly” diagram of the “parts list”
•
for the lubricating or greasing spots, and for the types of
oil or grease to be used.
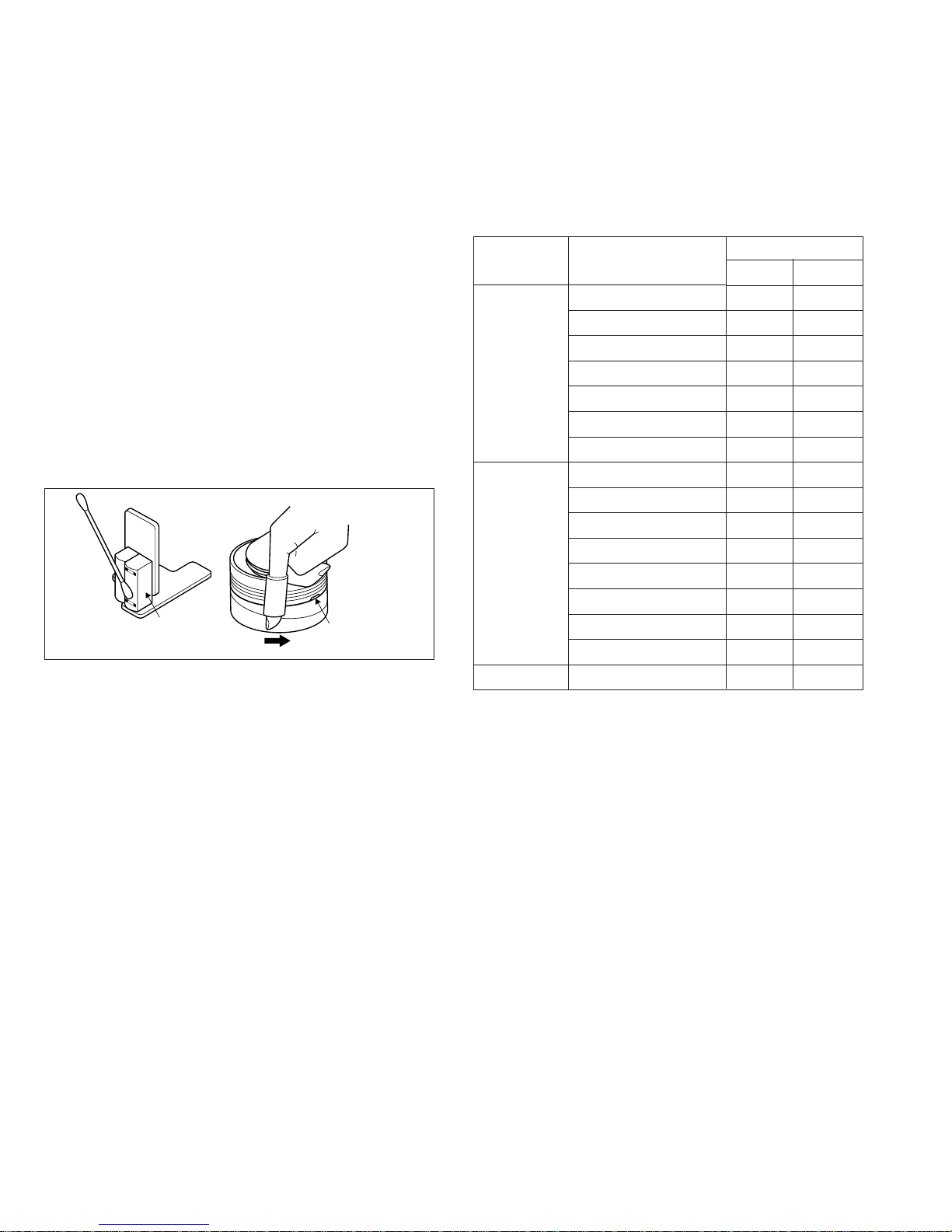
1.7.3 Suggested servicing schedule for main components
The following table indicates the suggested period for such
service measures as cleaning, lubrication and replacement. In
practice, the indicated periods will vary widely according to environmental and usage conditions. However, the indicated components should be inspected when a set is brought for service
and the maintenance work performed if necessary. Also note
that rubber parts may deform in time, even if the set is not used.
System Parts name
Drum assembly
A/C head
Pinch roller arm assembly
Tape transport
Drive
Other
Full erase head
Tension arm assembly
Capstan motor (Shaft)
Guide arm assembly
Capstan motor
Capstan brake assembly
Main brake assembly
Belt (Capstan)
Loading motor
Clutch unit
Worm gear
Control plate
Rotary encoder
Operation hours
1000H
C,X
C,X
C
C
C
C
C
X
2000H
X
C,X
C
C
C
C
C
X
X
X
X
X
X
X
X
X
C : Cleaning
X : Inspection or Replacement if necessary
1-10
Page 17

SECTION 2
DISASSEMBLING/ASSEMBLING OF MECHANISM
1. Before disassembling/assembling
1.1 Notes
This model’s mechanism relates closely to the rotary encoder
and system control circuit (the rotary encoder is meshed with
the control cam).
The system circuit detects the mechanism condition using the
rotary encoder’s phase (internal switch phase). Therefore, the
parts such as the rotary encoder, control plate, locking gear
and control cam need to be installed correctly in order for the
mechanism to operate properly. (For the mechanism phase
adjustment, refer to the installation of each part.)
• For the disassembling procedure of the main parts of the
main unit and notes, refer to the “Specific items for the product”.
• Before using a soldering iron, be sure to disconnect the
power plug from the AC outlet.
• Do not touch any of the adjustment points until a defect position is specified.
• When plugging or unplugging the connector, be sure not to
damage the wire.
• Be sure the springs are hooked all the way around and in
the correct direction.
• When performing repairs, take care not to damage a catch,
etc.
1.3 Setting the mechanism assembling mode
The mechanism-assembling mode is provided with this mechanism. When disassembling and assembling, it is required to
engage this mode.
Set the mode by adopting the following procedures.
(1) Remove the mechanism assembly using the disassembling
procedure.
(2) Turn gear (a) of the loading motor manually to set the mecha-
nism assembly to the eject end mode. Make sure that the
main deck is connected to the guide hole (a) of the drive
lever and the seal (a) of the main deck is connected to the
mark “E” of the control plate. This condition is called the
mechanism-assembling mode.
Seal (a)
“E” mark
CONTROL PLATE
Guide hole (a)
DRIVE LEVER
<Example>
OK NG
not hooked all the
()
way around
Fig. 1-1a
1.2 Mechanism operation check
When the mechanism is operated without a cassette loaded,
operate the mechanism in the mechanism service mode. (Refer to the specific service items for the product.)
LOADING MOTOR
Loading
Gear (a)
Unloading
Fig. 1-3a
2-1
Page 18
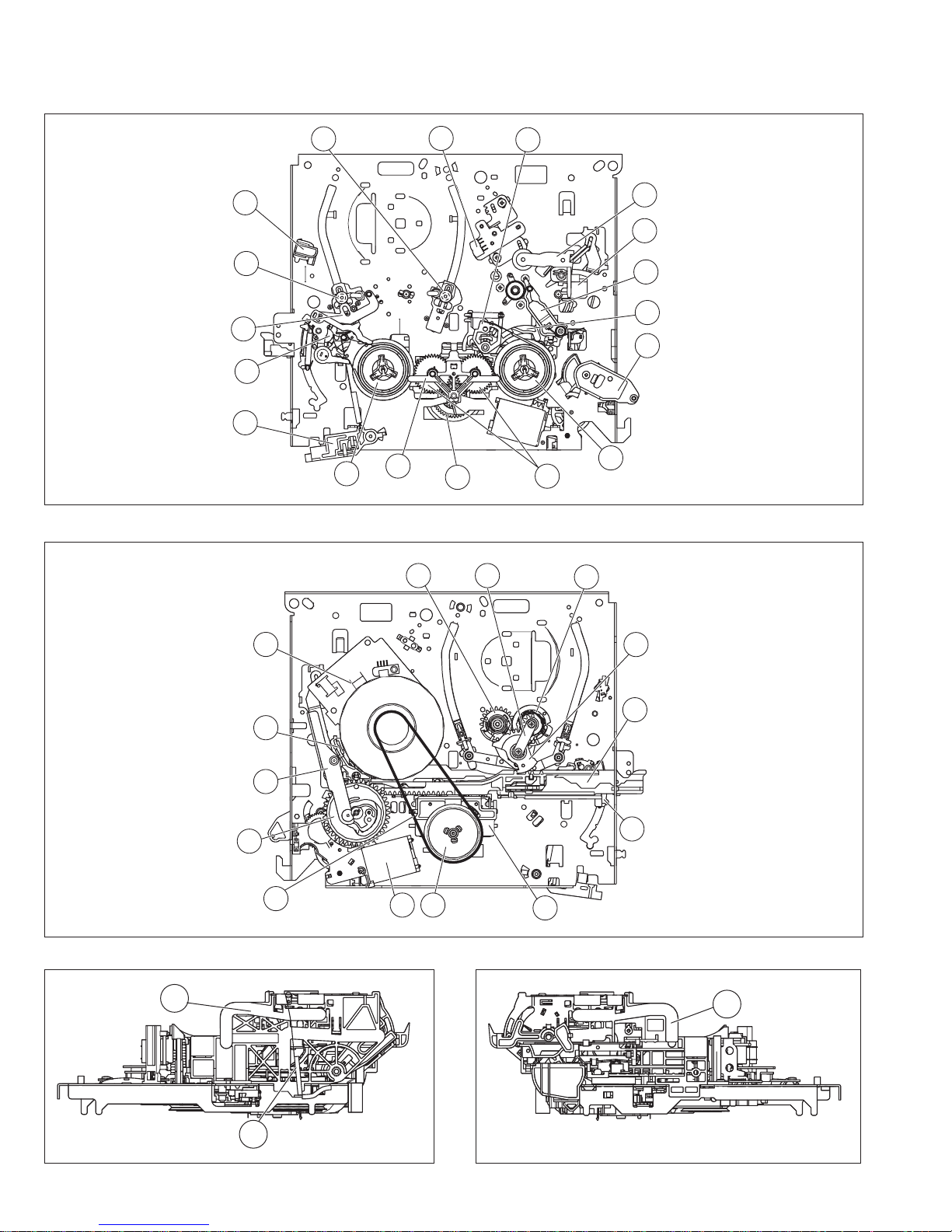
1.4 Layout of the main mechanism parts
Full erase head
Pole base assy
(supply side)
Tension arm assy
Tension arm base
Rec safety lever
T17
T1
T16
T15
T14
T2
Reel disk
(supply side)
Pole base assy
(take-up Side)
T13
Load gear assy
(take-up side)
T12
Idler arm
T3
Fig. 1-4a
B1
A/C head
B15
Direct gear
B2
Main brake assy
T4
T11
Fixing plate
(take-up side)
Ider gear 1/2
Load gear assy
B3
T5
T6
T7
T8
T9
Reel disk
T10
(take-up side)
(supply side)
Pinch roller arm assy
Lid guide
Guide arm assy
Brake lever
Drive lever
Side frame(L)
Capstan motor
Capstan brake
Press lever
Control cam
L2
B11
Belt
B14
B13
B12
B10
Loading motor assy
B9
B8
Clutch unit assy
Fig. 1-4b
B7
Change lever
B4
Load gear
B5
Control plate
B6
Tension arm lever
Side frame(R)
R1
Earth spring(1)
L1
Fig. 1-4c
2-2
Fig. 1-4d
Page 19

1.5 Disassembling procedure table
This table shows the order of parts removal when replacing each part. For replacement, remove the parts in the order of 1 to 18
shown in the table and install the parts in the reverse order.
The symbol number before each part name shows the number in the figure “Layout of the main mechanism parts”. T and B on the
right of each part name show the side from which the part should be removed (T: From the front of the mechanism, B: From the
rear of the mechanism, T/B: From both sides).
Symbols and numbers
Removal parts
(Reference items)
Symbols and numbers
Replacement parts
L1
2.1 Earth spring (1) T 1
-
2.1 Top frame T 2 1
-
2.1 Cassette holder T 3 1 2
L2
2.1 Side frame (L) T 3 1 2
-
2.1Drive arm T51234
R1
2.1 Side frame (R) T 3 1 2
T3
2.2 A/C head T 1
T17
- FE head T/B 1
T7
2.3 Guide arm assy T 1
T6
2.3 Lid guide T 1
T5
2.3
Pinch roller arm assy
T12
2.4Idler arm T4123
T11
2.4 Idler gear 1/2 T 5123 4
T4
2.5 Main brake assy (T) T 6123 45
T10
2.5 Reel disk (T) T 7123 456
T16
2.5Tension arm T6123 45
T13
2.5 Reel disk (S) T 7123 45
T15
2.5Tension arm base T7123 45
-
-T-up head T 8123 45
-
-T-up lever T8123 45
T8
2.5Brake lever T8123
T14
2.5Rec safety lever T7123456
B12
2.6 Press lever B 1
B11
2.6 Control cam B 2
B13
2.6 Capstan brake assy B 3
B9
2.6 Loading motor assy B 4
B10
2.7 Belt B 1
B14
2.7 Capstan motor T/B 2
-
- Wire holder T/B 1
B2
2.7 Fixing plate B 1
B4
2.7 Load gear B 2
B3
2.7
Loading gear assy(S)
B1
2.7
Loading gear assy(T)
T1
- Pole base assy(S) T/B 4
T2
- Pole base assy(T) T/B 5
-
- Load gear base B 5
B5
2.7 Control plate B 6
T9
-Drive lever T/B10123456
B8
2.8 Clutch unit B 2
B15
2.8 Direct gear B 3
B7
- Change lever T/B 6 1 2
B6
- Tension arm lever T/B 14 1 2 3 4 5
L1 - - L2 - R1 T6 T12 T11 T4 T10 T16 T15 B12B11B13 B9 B10 B2 B4 B3 B1 B5 B8 B15
Front(T)/Back(B) of mechanism
Number of removal steps
Earth spring (1)
Top frame
Cassette holder
Side frame (L)
Drive arm
Side frame (R)
Lid guide
Idler arm
Idler gear 1/2
Main brake (T)
Reel disk (T)
Tension arm
Tension arm base
Press lever
Control cam
Capstan brake assy
Loading motor assy
Belt
Fixing plate
Load gear
Loading gear assy (S)
T2 1
6
6
67
67
456
7
1
12
123
1
1
B3
B4
12
123
123
1234
1234
12 345
78 9
1
12
345
6789 101112 13
Loading gear assy (T)
Control plate
Clutch unit
Direct gear
2-3
Page 20

2. Replacement of the main mechanism parts
2.1 Cassette holder
2.1.1 Removal
(1) Remove the screws (a) and (b).
(2) Hold up the top frame, cassette holder assembly, drive arm
assembly and side frames (L/R) all together and remove
them by releasing the hooks (a) and (b).
Screw (a)
Screw (b)
2.1.3 Disassembling
(1) Release hook (a) to remove the earth spring (1) from the
top frame.
(2) Release the catches (a) and (b) and pull the top frame in
the direction shown by the arrow (a) to remove it.
(3) Pull out the side frame (R).
(4) Pull out the cassette holder assembly and drive arm assem-
bly from the side frame (L).
Hook (a)
Catch (a)
Catch (b)
Hook (a)
Hook (b)
Fig. 2-1a
2.1.2 Installation (phase adjustment)
(1) Turn gear (a) of the loading motor assembly so that the main
deck connects to the guide hole (a) of the drive lever.
(2) Hook the main deck to hooks (a) and (b).
(3) Place the projection of the drive lever to section (a) of the
side frame (R) and install the cassette holder to the main
deck. Make sure that the bosses of the side frame (L/R) con-
nect with the holes (a) and (b) of the main deck.
(4) Secure screws (a) and (b).
Screw (a)
Screw (b)
Hook (a)
Hook (b)
Hole
(a)
Section
(a)
Hole (b)
Guide hole (a)
DRIVE
LEVER
EARTH SPRING(1)
Arrow (a)
TOP FRAME
SIDE
FRAME(L)
CASSETTE HOLDER
Assembly
DRIVE ARM Assembly
SIDE FRAME(R)
Fig. 2-1c
2.1.4 Assembling (installation and phase adjustment)
(1) Turn gear (a) of the loading motor assembly so that the main
deck connects to the guide hole (a) of the drive lever.
(2) Place the projection of the drive lever on section (a) of the
side frame (R) and install the side frame (R) to the main deck.
(3) Secure screw (b).
(4) Place section (b) of the drive arm on the gear of the side
frame (R). Make sure that the pin of the door opener con-
nects with section (c) of the drive arm.
(5) Place the drive arm on section (d) of the side frame (L) and
install the side frame (L) on the main deck. Be sure to con-
nect the earth spring (1) to the side frame (L).
(6) Secure screw (a).
(7) Turn gear (a) of the loading motor assembly until the drive
arm is vertical.
(8) Place the slit of the side frame (L/R) at the foot of the cas-
sette holder assembly and install the cassette holder.
(9) Place the top frame on the position guide (a) of the side
frame (L/R) and push it in the direction shown by the arrow
(a) for installation.
(10) Hook the earth spring (1) to the hook (a) of the top frame.
Fig. 2-1b
2-4
Gear (a)
Page 21

SIDE FRAME(R)
Screw (b)
2.2 A/C head
2.2.1 Removal
(1) Remove screws (a) and (b).
(2) Remove the A/C head together with the head base.
(3) Remove the screws (c), (d) and (e) to remove the spring (a)
and the A/C head from the HEAD BASE.
Section (a)
DRIVE LEVER
Cassette Holder Assembly
Screw (a)
Guide hole (a)
Gear (a)
Section (c)
Section
(b)
Screw (e)
Screw (c)
Spring (a)
Screw (a)
HEAD BASE
Screw (d)
A/C HEAD
Screw (b)
Fig. 2-2a
2.2.2 Installation (initial setting)
To install the A/C head to the head base, secure the screws in
the order of (c), (d) and (e). To make the adjustment easy, temporarily elevate the A/C head.
SIDE FRAME(R)
DRIVE ARM(L)
Section (d)
Hook (a)
EARTH SPRING(1)
SIDE FRAME(L)
Position guide (a)
TOP FRAME
Fig. 2-1d
DRIVE ARM(R)
Arrow (a)
(Temporary height)
11mm
A/C HEAD
HEAD BASE
Fig. 2-2b
2-5
Page 22

2.3 Guide arm, pinch roller arm
2.3.1 Removal
(1) Remove the spring (a) from the hook (a) and detach the
guide arm assembly.
(2) Release the catch (a) to remove the lid guide.
(3) Remove the spring (b) from the hook (b) and detach the
pinch roller arm assembly.
2.4 Idler arm, idler gear 1/2
2.4.1 Removal
(1) Release the catches (a) and (b) to detach the idler arm.
(2) Detach the idler gear 1/2.
IDLER ARM
Catch (b)
Pinch roller arm assembly
Hook (a)Guide arm assembly Spring (a)
Catch (a)
Spring (b)
PRESS
LEVER
Hook (b)
LID GUIDE
Catch
(a)
IDLER GEAR 1/2
IDLER ARM
IDLER GEAR 2
IDLER GEAR 1
LID GUIDE
Pinch roller arm
assembly
Guide arm assembly
Fig. 2-3a
2-6
PRESS
LEVER
Fig. 2-4a
2.5 Main brake (T), brake lever, tension arm,
reel disk (S/T), Rec safety lever
2.5.1 Removal
(1) Remove the spring (a). (Detach section (b) of the spring (a).)
(2) Release the catch (a) to detach the main brake (T).
(3) Release the catch (b) to detach the reel disk (T) and the
spacer.
(4) Lift up and turn section (b) of the brake lever
counterclockwise to remove the brake lever.
(5) Remove the spring (b) from the hook (a).
(6) Release the catch (c) to detach the tension arm.
(7) Release the catch (d) to detach the reel disk (S) and the
spacer.
(8) Remove the spring (c) from the hook (b).
(9) Turn the tension arm base in the direction shown by arrow
(a) to release catch (e). Place the projections of the tension
arm base to the holes (a) to detach the tension arm base.
(10) While releasing the catch (f), turn the Rec safety lever
counterclockwise to remove it.
Page 23

Tension arm assembly
Catch (d)
Catch (c)
Screw (a)
Screw (a)
Loading motor
assembly
Solder (a)
Slit washer (a)
Slit washer
(b)
Catch (b)
Capstan brake assembly
CONTROL CAM
Slit washer (b)
PRESS LEVER
Capstan
brake assembly
CONTROL
CAM
Loading
motor
assembly
Spring (b)
Catch (c)
Hook (a)
Catch (d)
REEL DISK(S)
Main brake (T) assembly
Section (b)
Spring (a)
Spring (a)
BRAKE
LEVER
2.6 Press lever, control cam, capstan brake assembly,
loading motor assembly
2.6.1 Removal
(1) Remove the slit washer (a) to detach the press lever.
(2) Release the slit washer (b) to detach the control cam.
(3) Release the catch (b) to detach the capstan brake assem-
bly.
(4) Remove the solder (a).
(5) Remove the screw (a).
(6) Release the catches (c) and (d) to detach the loading motor
assembly.
Tension arm base
assembly
REC SAFETY
LEVER
Tension arm base assembly
Arrow (a)
Hole (a)
Catch (e)
Hole (a)
Hook (b)
Catch (a)
Tension arm
assembly
Main brake (T)
assembly
REEL DISK(T)
REEL DISK(S)
SPACER
REEL DISK(T)
Catch (b)
BRAKE
LEVER
Spring (c)
REC
SAFETY
LEVER
Catch (f)
Fig. 2-5a
Fig. 2-6a
2-7
Page 24

2.6.2 Installation (phase adjustment)
(1) Attach the loading motor assembly to the main deck.
(2) Secure the screw (a).
(3) Solder the wire to section (a).
(4) Arrange the wire along with the position guide (b).
(5) Attach the capstan brake assembly to the main deck.
(6) Place the main deck on the guide hole (a) of the control plate.
(7) Place the main deck on the guide hole (b) of the drive lever.
(8) Place the main deck no guide hole (c) of the control cam to
install the control cam.
(9) Move the capstan brake in the direction shown by the arrow
(a) to attach the press lever to the shaft (a). Make sure that
the boss of the press lever fits in the control cam, and that
the shaft (b) of the pinch roller arm assembly connects with
the hole of the press lever.
(10) Attach slit washer (a) to shaft (a).
Wire (black)Wire (red)
Section (a)
Capstan brake assembly
2.7 Capstan motor, load gear, control plate
2.7.1 Removal
(1) Detach the belt.
(2) Check that the FFC connector on the drum is disconnected.
(3) Release the catch (a) to remove the FFC wire.
(4) Remove the screws (a) to detach the capstan motor.
(5) Remove the screws (b) to detach the fixing plate.
(6) Release the catch (b) to detach the load gear.
(7) Turn the load gear (S/T) in the loading direction to detach it.
(8) Remove the control plate.
Screws (a)
Position
guide (b)
DRIVE
LEVER
Guide hole (b)
Arrow (a)
Screw (a)
CONTROL CAM
Shaft (a)
Guide hole (a)
Guide hole (c)
Loading motor assembly
Shaft (a)
Shaft (b)
CONTROL
PLATE
CONTROL
PLATE
Catch (b)
LOAD GEAR
Screws (b)
BELT
Fig. 2-7a
Load gear (T) assembly
Load gear (S) assembly
LOAD GEAR
FIXING PLATE
Capstan motor assembly
Catch (a)
FFC
PRESS LEVER
Slit washer (a)
Fig. 2-6b
2-8
Page 25

2.7.2 Installation (phase adjustment)
DIRECT GEAR
Spring (a)
CLUTCH UNIT
Slit washer (a)
(1) Place the main deck on the guide hole (a) of the tension arm
lever.
(2) Place the main deck on the guide hole (b) of the brake le-
ver.
(3) Attach the control plate to align with the position guide (a).
(4) Place the hole (c) of the load arm (T) on the pole base (T)
and the load gear (T) on the load gear base.
(5) Place the hole (d) of the load arm (S) on the pole base (S)
and the load gear (S) on the load gear base. Be sure to align
the guide mark (e) of the load gear (T) to that of the load
gear (S).
(6) Turn the load gear (S/T) in the unloading direction to place
the main deck on the guide hole (f) of the load gear (T).
(7) Place the main deck on the guide hole (g) of the control plate.
(8) Attach the load gear on the load gear base so that the con-
trol plate is placed on the edge (h) of the load gear.
(9) Place the fixing plate on the shaft of the load gear base and
secure the screws (b).
2.8 Clutch unit assembly, direct gear
2.8.1 Removal
(1) Remove the slit washer (a) to detach the clutch unit assem-
bly.
(2) Remove the spring (a) and the direct gear.
POLE
BASE(T)
Hole (c)
Load gear (T) assembly
Insertion direction
Guide hole (g)
Guide marks (e)
LOAD GEAR BASE
Load gear (T)
assembly
CONTROL PLATE
Guide hole (f)
(From the top)
Load gear (S) assembly
Edge (h)
Position guide (a)
POLE
BASE(S)
Hole (d)
Load gear (S)
assembly
Screws (b)
FIXING
PLATE
LOAD GEAR
Fig. 2-8a
Guide hole (b)
BRAKE LEVER
Fig. 2-7b
Guide hole (a)
TENSION ARM LEVER
2-9
Page 26

3. Mechanism timing chart
MECHANISM MODE
CONTROL PLATE
MARK
POLE BASE
REEL LOCK
TENSION ARM
TENSION
ARM LEVER
ON
OFF
LOCK
FREE
ON
OFF
PLAY
STOP
FF/REW
REV
OFF
REV
SERCH
/SLOW
/STILL
STOP
REEL
BRAKE
EJECT
PLAY
FOR
SLOW
/STILL
E P SL R ST B FR
FF
/REW
(STOP MODE PRESS UP)
ON
BRAKE
LEVER
GUIDE ARM
PINCH
ROLLER
CONTACT
CAPSTAN BRAKE
TU LEVER
DIRECT GEAR
Movements of a
CONTROL PLATE
ON
OFF
ON
OFF
ON
OFF
ON
OFF
OFF2
OFF1
ON
OFF
DIRECT
CLUTCH
(m/m)
0 5 15 20 25 30 35 40 45 50 5510
2-10
Page 27

SECTION 3
INITIAL MODE
DATA CODE
CUSTOM CODE
43: A CODE
[Data transmitting method]
Depress the “ ” ( 3 ) button
after the data code is set.
Jig RCU
ADJUSTMENT
3.1 Precaution
• The adjustments of this unit include the mechanism
compatibility and electrical adjustments. During the
performance of this work, be sure to observe the precautions for each type of adjustment.
• If there is a reference to a signal input methed in the
signal column of the adjustment chart, “Ext. S-input”
means the Y/C separated video signal and “Ext. input”
means the composite video signal input.
• Unless otherwise specified, all measuring points and
adjustment parts are located on the Main board.
3.1.1 Required test equipments
• Color (colour) television or monitor
• Oscilloscope:
wide-band, dual-trace, triggered delayed sweep
• Signal generator: RF / IF sweep / marker
• Signal generator: stairstep, color (colour) bar [NTSC]
• Recording tape
• Digit-key remote controller(provided)
3.1.2 Required adjustment tools
: Used : Not used
Electrical
adjustment
Alignment tape
(SP, stairstep, NTSC)
MHP
Roller driver
Back tension cassette gauge
Alignment tape(MHP)
Alignment tape(MHP-L)
Roller driver
PTU94002
Back tension cassette gauge
PUJ48076-2
Machanism
compatibility
adjustment
3.1.4 Switch settings
When adjusting this unit, set the VCR mode and switches
as described below.
• When using the Jig RCU, it is required to set the VCR
to the Jig RCU mode (the mode in which codes from
the Jig RCU can be received). (See SECTION 1 DISASSEMBLY.)
Fig. 3-1-4a Jig RCU [PTU94023B]
•
Set the switches as shown below unless otherwise
specified on the relevant adjustment chart. The switches
that are not listed below can be set as desired.
If the VCR is not equipped with the functions detailed
below, setup is not required.
AUTO PICTURE/VIDEO CALIBRATION/
B.E.S.T./D.S.P.C.
PICTURE CONTROL/SMART PICTURE
VIDEO STABILIZER OFF
TBC ON
Digital 3R ON
VIDEO NAVIGATION/TAPE MANAGER
BLUE BACK OFF
OFF
NORMAL/NATURAL
OFF
Alignment tape
(EP, stairstep, NTSC)
MHP-L
3.1.3
Color (colour) bar signal, color (colour) bar pattern
Color(colour) bar signal [NTSC]• Color(colour) bar pattern [NTSC]
•
1V
Horizontal sync
White(75%)
100 IRE
40 IRE
White(100%)
Yellow
Cyan
Green
Magenta
QI
Red
Blue
Burst
40 IRE
(75%)
Cyan
White
Q I Black
Yellow
White
100%
Green
Magenta
Red
Blue
3.1.5
Manual tracking mode (Auto tracking ON/OFF) setting
(1) In order to set to the manual tracking mode during tape
playback, press the STANDARD/3X SPEED button on the
remote control unit.
• Each press of the button switches the auto tracking ON
or OFF.
• When the auto tracking is OFF, the monitor screen displays “AT: OFF”.
• When the manual tracking mode is set, the tracking is
placed at the center position.
(2) Press CHANNEL +/- to adjust the tracking manually.
3-1
Page 28

3.2 Mechanism compatibility adjustment
Notes:
• Although compatibility adjustment is very important, it is not
necessary to perform this as part of the normal servicing
work. It will be required when you have replaced the A/C head,
drum assembly or any part of the tape transport system.
• To prevent damaging the alignment tape in the compatibility
adjustment, prepare a cassette tape (for self-recording/playback), perform a test on it by transporting it and making sure
that the tape is not bent by the tape transport mechanisms
such as in the guide rollers.(See Fig.3-2-2a)
3.2.1 Tension pole position
Notes:
•
This adjustment must be performed every time the tension
band is replaced.
Signal (A) •Back tension cassette gauge
Mode (B1) • Play back position
(B2) •Eject end
Adjustment part (F) •Adjust pin [Mechansim assembly]
Specified value (G)
[PUJ48076-2]
• 25 - 51 gf•cm (2.45 – 5 × 10-3 Nm]
(1) Play back the back tension cassette gauge (A).
(2) Check that the indicated value on the left side gauge is within the speci-
fied value (G).
(3) If the indicated value is not within the specified value (G), perform the
(1) Play back the alignment tape (A1).
(2) Apply the external trigger signal to D.FF (E), to observe
the V.PB FM waveform at the measuring point (D).
(3) Set the VCR to the manual tracking mode.
(4)
Make sure that there is no significant level drop of the V.PB
FM waveform caused by the tracking operation, with its
generally parallel and linear variation ensured. Perform the
following adjustments when required. (See Fig. 3-2-2b.)
(5) Reduce the V.PB FM waveform by the tracking opera-
tion. If a drop in level is found on the left side, turn the
guide roller of the pole base assembly (supply side) with
the roller driver to make the V.PB FM waveform linear.
If a drop in level is on the right side, likewise turn the guide
roller of the pole base assembly (take-up side) with the
roller driver to make it linear. (See Fig. 3-2-2b.)
(6) Make sure that the V.PB FM waveform varies in parallel
and linearly with the tracking operation again. When re-
quired, perform fine-adjustment of the guide roller of the
pole base assembly (supply or take-up side).
(7) Unload the cassette tape once, play back the alignment
tape (A1) again and confirm the V.PB FM waveform.
(8)
After adjustment, confirm that the tape wrinkling does not
occur at the roller upper or lower limits. (See Fig. 3-2-2a.)
[Perform adjustment step (9) only for the models
equipped with SP mode and EP (or LP) mode.]
(9) Repeat steps (1) to (8) by using the alignment tape (A2).
adjustment in a following procedure.(See Fig.3-2-1a)
1) Remove the top frame, cassette holder and side frames (L/R) all
together. (See “Mechanism Assembly and Disassembly”.)
2) Rotate the loading motor gear to move the control plate so that the
triangular stamping to the left of the “P” stamping is aligned with the
stamping (a) on the main deck. This positioning is mode (B1).
3) Adjust by turning the adjustment pin so that the tip of the tension
arm is aligned with the stamping (b) on the main deck.
4) Rotate the reel disk (S) by about one turn clockwise and make sure
that the round hole of the adjustment pin is located in the “OK” range.
If it is outside this range, restart the adjustment from the beginning.
After completion of the adjustment, rotate the loading gear motor to return it to the mode (B2) position.
Improper
(a) GUIDE ROLLER
(b) GUIDE POLE
Proper
TENSION ARM
CONTROL PLATE
Stamping(b)
OK
ADJUST PIN
NG
Stamping(a)
Fig. 3-2-1a Switching point
3.2.2 FM waveform linearity
Signal (A1) •
(A2) •
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D) •TP106 (PB. FM)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) •Guide roller [Mechanism assembly]
Specified value (G) • Flat V.PB FM waveform
Adjustment tool (H)
Alignment tape(SP, stairstep, NTSC) [MHP]
Alignment tape(EP, stairstep, NTSC) [MHP-L]
• Roller driver [PTU94002]
• Proper waveform variation
• Improper waveform variation
A
C
Fig. 3-2-2a
Up Down
B
D
Fig. 3-2-2b
Roller driver
Guide roller
(supply side)
3-2
Page 29

3.2.3 Height and tilt of the A/C head
Head base
Roller driver
To the capstan
To the drum
Toward the capstan
Toward the drum
Screw (5)
Screw (4)
A/C head
Alignment tape
[SP, stairstep]
played with the
SP head
Alignment tape
[EP(LP), stairstep]
played with the
EP(LP) head
Drum side Control head position Capstan side
X-value adjustment point
Maximum
Waveform output
Note:
• Set a temporary level of the height of the A/C head in
advance to make the adjustment easier after the A/C
head has been replaced. (See “Mechanism Assembly
and Disassembly”.)
Signal (A) •
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D1)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) •A/C head [Mechanism assembly]
Specified value (G)
Alignment tape(SP, stairstep, NTSC) [MHP]
• AUDIO OUT terminal
(D2) •TP4001 (CTL. P)
• Maximum waveform
(1) Play back the alignment tape (A).
(2) Apply the external trigger signal to D.FF (E), to observe
the AUDIO OUT waveform and Control pulse waveform
at the measuring points (D1) and (D2) in the ALT mode.
(3) Set the VCR to the manual tracking mode.
(4) Adjust the AUDIO OUT waveform and Control pulse
waveform by turning the screws (1), (2) and (3) little by
little until both waveforms reach maximum. The screw (1)
and (3) are for adjustment of tilt and the screw (2) for azi-
muth.
Head base
(2)
(1)
3.2.4 A/C head phase (X-value)
Signal (A1) •
(A2) •
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D) •TP106 (PB. FM)
External trigger (E) • TP111 (D.FF)
Adjustment part (F) •
Specified value (G) • Maximum V.PB FM waveform
Adjustment tool (H) •Roller driver [PTU94002]
Alignment tape(SP, stairstep, NTSC) [MHP]
Alignment tape(EP, stairstep, NTSC) [MHP-L]
A/C head base [Mechanism assembly]
(1) Play back the alignment tape (A1).
(2) Apply the external trigger signal to D.FF (E), to observe
the V.PB FM waveform at the measuring point (D).
(3) Set the VCR to the manual tracking mode.
(4) Loosen the screws (4) and (5), then set the Roller driver
to the innermost projected part of the A/C head. (See Fig.
3-2-4a.)
(5) Rotate the roller driver so that the A/C head comes clos-
est to the capstan. From there, move the A/C head back
gradually toward the drum until the point where the FM
waveform is maximized for the second time, and then
tighten the screws (4) and (5) temporarily.
(6) Play an alignment tape (A2) and set to the manual-track-
ing mode.
(7) Fine-adjust A/C head base position to maximize the FM
waveform, and then tighten the screws (4) and (5) firmly.
(8) Play alignment tapes (A1) and (A2) and confirm that the
FM waveforms are maximized when the tracking is at the
center position.
A/C head
(3)
Fig. 3-2-3a
AUDIO OUT
CTL. P
Fig. 3-2-4a
Fig. 3-2-4b
3-3
Page 30

3.3 Electrical Adjustment
Note:
The following adjustment procedures are not only necessary
after replacement of consumable mechanical parts or board
assemblies, but are also provided as references to be referred to when servicing the electrical circuitry.
In case of trouble with the electrical circuitry, always begin a
service by identifying the defective points by using the measuring instruments as described in the following electrical adjustment procedures. After this, proceed to the repair, replacement and/or adjustment. If the required measuring instruments are not available in the field, do not change the
adjustment parts (variable resistor, etc.) carelessly.
3.3.1 Servo circuit
3.3.1.1 Switching point
Signal (A1) • Stairstep signal
Mode (B) • PB
Equipment (C) • Oscilloscope
Measuring point (D1) •
External trigger (E) • TP111 (D.FF)
Adjustment part (F) • R4028
Specified value (G) • 6.5 ± 0.5H
(A2) •
(D2) • TP106 (PB. FM)
Alignment tape (EP,stairstep,NTSC) [MHP-L]
VIDEO OUT terminal (75Ø terminated)
(1) Play back the signal (A1) of the alignment tape (A2).
(2) Apply the external trigger signal to D.FF (E) to observe
the VIDEO OUT waveform and V.PB FM waveform at the
measuring points (D1) and (D2).
(3) Set the VCR to the manual tracking mode.
(4) Adjust tracking so that the V.PB FM waveform becomes
maximum.
(5) Adjust the adjustment point (F) so that the value of the
switching point becomes identical to the adjustment value
(G).
Trigger point
Switching point
V.sync
V. rate
Fig. 3-3-1-1a Switching point
3-4
Page 31

Page 32

JVC SERVICE & ENGINEERING COMPANY OF AMERICA
DIVISION OF JVC AMERICAS CORP.
Head office
East Coast
Midwest
West Coast
Atlanta
Hawaii
Head office
Montreal
Vancouver
:
1700 Valley Road Wayne, New Jersey 07470-9976
10 New Maple Avenue Pine Brook, New Jersey 07058-9641
:
705 Enterprise Street Aurora, Illinois 60504-8149
:
5665 Corporate Avenue Cypress, California 90630-0024
:
1500 Lakes Parkway Lawrenceville, Georgia 30043-5857
:
2969 Mapunapuna Place Honolulu, Hawaii 96819-2040
:
:
21 Finchdene Square Scarborough, Ontario M1X 1A7
:
16800 Rte Trans-Canadienne, Kirkland, Quebec H9H 5G7
:
13040 Worster Court Richmond, B.C. V6V 2B3
(973)317-5000
(973)396-1000
(630)851-7855
(714)229-8011
(770)339-2582
(808)833-5828
JVC CANADA INC.
(416)293-1311
(514)871-1311
(604)270-1311
S40895-04
Printed in Japan
Page 33

SECTION 4
123
2.5
(5.0)
1.8
PB and REC modes
(Voltage of PB and REC modes
are the same)
PB mode
REC mode
CHARTS AND DIAGRAMS
NOTES OF SCHEMATIC DIAGRAM
Safety precautions
The Components identified by the symbol are
critical for safety. For continued safety, replace safety
critical components only with manufacturer's recommended parts.
1. Units of components on the schematic diagram
Unless otherwise specified.
1) All resistance values are in ohm, 1/6 W, 1/8 W (refer to
parts list).
Chip resistors are 1/16 W.
K: KØ (1000Ø), M: MØ (1000KØ)
2) All capacitance values are in µF, (P: PF).
3) All inductance values are in µH, (m: mH).
4) All diodes are 1SS133, MA165 or 1N4148M (refer to parts
list).
2. Indications of control voltage
AUX : Active at high
AUX or AUX(L) : Active at low
3. Interpreting Connector indications
1
2
Removable connector
3
1
2
Wire soldered directly on board
3
4) Indication on schematic diagram
Voltage Indications for REC and PB mode on the schematic diagram are as shown below.
Note: If the voltages are not indicated on the schematic
diagram, refer to the voltage charts.
5. Waveform measurement
1) Video circuits
REC : Colour bar signal in SP mode, normal VHS mode
PB : Alignment tape, colour bar SP mode, normal VHS
mode
2) Audio circuits
REC : 1KHz, –8 dBs sine wave signal in SP mode, normal
VHS mode
PB : REC then playback it
3) Movie Camera circuits
Measured using a correctly illuminated gray scale or colour
bar test chatrs in the E-E mode
4) Indication on schematic diagram
Waveform indications on the schematic diagram are as
shown below.
24
22201816
Measurement point
1
Non-removable Board connector
2
3
1
2
4
Board to Board
3
Connected pattern on board
The arrows indicate signal path
4. Voltage measurement
1) Video circuits
REC : Colour bar signal in SP mode, normal VHS mode
PB : Alignment tape, colour bar SP mode, normal VHS
mode
— : Unmeasurable or unnecessary to measure
2) Audio circuits
REC : 1KHz, –8 dBs sine wave signal in SP mode, Nor-
mal VHS mode
PB : REC then playback it
3) Movie Camera circuits
Measured using a correctly illuminated gray scale or colour
S40884-03
bar test charts in the E-E mode
C329
C330
0.1/50
R344
47K
R343
18K
0.1/50
C331
11/10
R345
10K
5) Waveform indications
Waveform number
WF25
REC/PB 1.2 Vp-p
50 mV/2 msec/DIV
Oscilloscope Volts and Time/Division, Probe 10 : 1
Mode : REC or PB modes
WF25
R346
15K
ALC OUT
Waveform number
Waveform name or
measurement point
Level : 1.2 Vp-p
4-1
Page 34

6. Signal path Symbols
R216
OPEN
The arrows indicate the signal path as follows.
Playback signal path
Playback and recording signal path
Recording signal path
(including E-E signal path)
Capstan servo path
CIRCUIT BOARD NOTES
1. Foil and Component sides
1) Foil side (B side) :
Parts on the foil side seen from foil face (pattern face)
are indicated.
2) Component side (A side) :
Parts on the component side seen from component face
(parts face) indicated.
Drum servo path
(Example)
R-Y
Playback R-Y signal path
Y
Recording Y signal path
7. Indication of the parts for adjustments
The parts for the adjustments are surrounded with the circle as
shown below.
8. Indication of the parts not mounted on the circuit board
“OPEN” is indicated by the parts not mounted on the circuit
board.
2. Parts location guides
Parts location are indicated by guide scale on the circuit board.
REF No. LOCATION
Category: IC
Horizontal “A” zone
Vertical “6” zone
(A : Component side)
(D : Discrete component)
B : Foil side
C : Chip component
IC
IC101 B C 6A
Note:
For general information in service manual, please refer
to the Service Manual of GENERAL INFORMA TION Edition 4 No. 82054D (January 1994).
4-2
S40884-03
Page 35

4.1 BOARD INTERCONNECTIONS
4-3 4-4
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p10401001a_rev0
OPEN
OPEN
OPEN
OPEN
###
#
AC INPUT
ROM
LIVE
NEUTRAL
TU6001
#
FLASH
WRITER
b5/
JSA
JSB
VIDEO IN
TUNER
ANT IN
GND
KEY OUT
NC
NC
ANT OUT
REAR VIDEO REAR AUDIO
#
OUT
MATSUSHITA
CN7004
#
NTSC
NTSC
#
#
#
#
#
VIDEO/N.AUDIO,FMA/DEMOD,SW.REG,SYSCON,TUNER,FRONT,TERMINAL
NC(GND)
NC(GND)
AUDIO IN
CH SW
MOD B(SW5V)
CONV.CTL[H]
LOCK(L)
NC(OPEN)
(RF AGC)
(BT)ASSCL
SDA
NC(5V)
MB(SW5V)
TU(30V)
IF OUT
IF IN
AUDIO OUT
(SIF OUT)
AFT
VIDEO OUT
ALPS/LG/SANYO
VIDEO IN
OUT[R]
FRONT VIDEO
IN IN[L]
0
AUDIO IN
CH SW
MOD B(SW5V)
CONV.CTL[H]
LOCK(L)
3
(RF AGC)NCAS
SCL
SDANCMB(SW5V)
TU(30V)
IF OUTTPAUDIO OUT
SIF OUT
AFT
VIDEO OUT
MAIN
R/P
A.E.
CTL
CN2001
REC
PLAY
ERASE
GND (AUDIO)
CTL[-]
CTL[+]
b5/
1 2 A/C HEAD
FULL ERASE HEAD
F.E.
CN2002
FULL ERASE
GND
b5/
CAP.M_CTL
LM_F/R/S
DRUM_PG/FG
4 1 U.DRUM
LP/EP
LP/EPSPSP
FMA
FMA
CH1 CH1 CH1
CH2 CH2 CH2
CN1
LP/EP_CH1
LP/EP_CH2
SP_CH1
SP_CH2
FMA_CH1
DRUM_VCTL
FMA_CH2
LSD
DRUM MOTOR
/57CAP MDA
M
CN3001
C.FG_IN
CAP.M_Vcc
Vcc5V
CAP.M_F/R
LM_VCTL
M_GND
S_GND
Vcc12
ROTARY ENCODER
CN3004
LSB
LSC
LSA
GND
CN7003
3
CN7001
JSA
JSB
GND
KEY_OUT
FW3001
P20
FW7104
PAUSE/COMP
GND
PAUSE/COMP
R.PAUSE
GND
J7105
99
For future models
8
CN3010
ADV.JOG
NO NAME
JSA
JSB
3
12
38
GND
41
KEY OUT
57
OUT[L]
R.PAUSE
FRONT AUDIO
99
IN[R]
VDD
SBi0_FRSIS
SBo0_FRSIS
MAIN
GND
A/C HEAD
SXi
iRQ0
ADV. JOG
U.DRUM
CAP MDA/DRUM MOTOR
R.PAUSE
Page 36

4.2 MAIN (VIDEO/N.AUDIO) SCHEMATIC DIAGRAM
4-5 4-6
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p10380001a_rev1
IC1
C9
C12
R78
C144
R3
R2010
C2004
R2007
C22
CN1
C11 C14
C62
C16
C24
C32
C51
C2014
C17
C19
C30
C28
L11
L4
CN2001
D1
D2
C33
C37
C31
Q22
R9
C40
C34
R8
X2
C36
B2
L3
C21C20
R6
B1
R7
C15
FMA_CH1
R90
C39
V.PULSE
FRONT_V_IN
R104
Q32
TU_VIDEO
GND
GND
R93
Q38
B3
C136
C1
C6
C5
L1
R66
C2
C3
V_TO_OSD
C4
VIDEO_ENV
C120
R118
C7
FMA_COM
C8
FMA_CH2
GND
SW5V
SW12V
NA_PB
R77
NA_REC
LINE_OUT[L]
LINE_OUT[R]
F.AUDIO[R]
F.AUDIO[L]
R49
C23
A.MUTE[H]
L5
C25
C35
C26
C38
AGC_CTL
SB_GAIN
I2C_CLK_A/V
I2C_DATA_A/V
D.FF
Fsc
LINE_OUT[L]
GND
F.AUDIO[R]
F.AUDIO[L]
LINE_OUT[R]
RF_AUDIO
GND
R1
C10
R2
TP106
TP111
C29
C27
R2013
R2014
C2006
R2015
C2007
C2008
C2010
C2009
R2016
C2011
R2017
Q2003
R2018
R2019
Q2002
Q2001
C2012
C2003
L2001
C2002 C2001
Q2055
GND
N.REC_ST[H]
RF_AUDIO
R2003
R2055
C2005
R2056
C2054C2055
C2053
R2054
Q2051
C2052
Q2053
C2051
N.REC[H]
Q2052
CTL[-]
CTL[+]
Q2054
R2053
T2051
R2060
R2059
R2058
R2057
CN2002
0.01
33p
1K
0.001
6.8k
12k
12k
47
0.1 0.1
0.1
0.1
0.1
0.01
1
3.3
2.2
0.47
3.3
12µ
10µ
2.2
47
47
1K
10
0.1
1K
4.7
10µ
0.11
27k
820
1
470
0.01
6.8K
1K
0.1µ
0.01
47
10µ
0.1µ
0.1µ
0.1µ
1µ
2.2K
470p
0.1
10k
560
0.01
10µ
5p
0.033
0.01
47
6.8k
150p
1.5k
4700p
0.022
6.8k
220k
0.012
220
22
4.7
0.0015
0.001
47k
4.7
15k
4.7k
4.7k
4.7
47 1 4.7
100
3.3
4.7
82
0.02210
0.0047
12k
0.082
330p 4.7K
18k
47k
18k
47k
JCP8041-NVA
OPEN
/6.3
/50
OPEN
/50
/50
/50
/50
OPEN
/50
/6.3
/6.3
2SC4081/QRS
2PC4081/R/
/16
QAX0575-001
QAX0682-001
QAX0690-001
QAX0575-001
/25
OPEN
/50
SHORT
OPEN
2SC4081/QRS/-X
2PC4081/R/-X
OPEN
OPEN
/16
OPEN
/50
/6.3
/16
/50
/50
DTA144WUA
PDTA144WU
UN511E
RN2309
2SC4081/QRS/
2SD1819A/QRS/
2PC4081/R/
2SC4081/QRS/
2SD1819A/QRS/
2PC4081/R/
/50
/6.3
SHORT
/50 /50
DTC144WUA
PDTC144WU
UN521E
RN1309
/50
/25
2SC4081/QRS/
2SD1819A/QRS/
2PC4081/R/
MY
DTC144WUA
PDTC144WU
UN521E
RN1309
2SA1576A/QR/
2SB1218/QR/
2PA1576/R/
2SA1576A/QR/
2SB1218A/QR/
2PA1576/R/
PELN0832
PELN0954
QQR0002-001
FE
TO TERMINAL
TO TUNER
TO SW.REG
TO OSD
0
DET
TO FMA/DEMOD
3
MAIN(VIDEO/N.AUDIO)
TO SYSCON
PRE/REC GND
PRE/REC VCC
REC
PLAY
TO FMA/DEMOD
TO DRUM
TO SYSCON
TO A/C HEAD
D.FF
ERASE
GND(AUDIO)
CTL[-]
CTL[+]
D.FF
SP
PRE/REC
AMP
LP/EP
PRE/REC
AMP
ENV OUT
SP1
SP2
COMMON
COMMON
LP/EP1
LP/EP2
A.Vcc
MONO-DET
NC
-10dB
-10dB -10dB
-10dB
AGC
ALC
FBC
AGC DET
PB ALC
SYNC SEP
6dB
6dB
SQUELCH
D1*D24
Y-LPF
P.C.
CLAMP
CLAMPCLAMP
Y VCC
CLEAR
N.C.
D.E.
YNR
LPF
OFFSET
Y GND
N.L.
ET
Y
FBC
ALC
MAIN
DE EMPH.
REC
W.C./D.C
MAIN
VCA
CARREA
S-DET
CARR./DEV.ADJ
MOD
LPF
SUB LPF DE MOD D.LIM.
DO DET
G EQ
P EQ
SQPB DL
FM AGC
DET
MUTE
629TRAP
COMP
BDL GND
SB GAIN
C-SQUELCH
PB FM
KILLER
DET OUT
1/2
2FL VCO
REC APC
PB APC
REC AFC
ACC DET
X'tal
VCO/XO
FMA_CH1
FMA_CH2
SP_CH1
SP_CH2
LP/EP_CH1
LP/EP_CH2
CR DET
2Fsc OUT
LPF2FscVCO
Fh LOCK CTL
C VCC
PULSE
GEN.
DISCRI
APC SW
C.KILLER
ID DET
DOWN CONV.
4PHASE GEN.
1/2
PHASE SW.
TANK
MESECAM
IIC LOGIC
CLK
DATA
WHITE
BDL DET
CNV.
NT on PAL
BDL VCC
C
VCA
CCD LPF
SQPB
LEVEL DET1 LEVEL DET2
REC LEV.
TRAP
LPF
C.K.
ACC
2M LPF
HPF
BPF
PILOT
BURST
CTL.P.TRAP
EMPH./DE EMPH.
C-LPF
MAIN
MAIN
CONV.1
CONV.2
C-LPF
DL
Fh TRAP
EQ
LPF
BDL
EMPHA.
SYNC
DET
CTL
C GND
BDL
42PIN[L]
42PIN[L]
D17
CTL
INT
EXT
R
R
R
R
R
R
R
R
R
R
R
RR
R
P
PP
P
P
P
P
P
P
P
P
P
P
DO DO
&REC
ET
ET
SQPB
SQPB
SQPB SQPB
SP
SP
SECAM
SECAM
D1*D18
D1*D18
SECAM SECAM
SEP
COMP
P
D5 D5
CH1
CH2CH3
CH4
ADD
C.K.
LIM.
D1*D24
D4
D4
BAND_GAP
HIFI
INPUT_SEL
HIFI
DC PB
GND
A.MUTE
A.GND
Comb ctl
Page 37

4.3 MAIN (SYSCON) SCHEMATIC DIAGRAM
4-7 4-8
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p10379001a_rev0.1
OPEN
OPEN
C202
R201
D4003
Q4001
FW3001
L203
C3055
JSA
R3208
I2C_CLK
Q3005
R3240
RC
JS3001
I2C_DATA
R3241
N.REC_ST[H]
R3253
R4001
R3252
JSB
X3001
R3254
C201
L201
R202
CN3001
CP3002
L4001
C205
C4031
CN3010
IC3001
MN101D06GJC
R4003
R3233
R3234
R3255
D3006
LED
C3071
CP3001
TU_MUTE[H]
REC_LINK
CP4002
C3056
C4004
R4010
CONV_CTL[H]
C4022
R3205
R3114
X3002
I2C_CLK
D3007
R4002
C4001
R4011
R4012
C4009
C207
R4019
R3094
R3093
C4012
GND
R3092
R3091
C3007
R3224
C3017
C3016
R3210
I2C_DATA
C4010
CTL[-]
Q3001
C3053
VR4028
SW PT ADJ
R3226
R4026
R4027
R3135
C4007
R3134
C4002
C3022
Q3007
R4018
R3133
R3132
R3131
R3140
R3139
DIG1
R3138
R3137
C4011
R3136
C203
R3223
C3018
C3020
C3023
C3030 C3029
Q3004
D3004
D3005
R3225
Q3002
R3211
C3008
R3209
C3070
D3001
R3222
R3220
C3015
C3013
R3217
R3216
D3002
PC3001 PC3002
R3212 R3214
A.ENV/ND[L]
M12V
A.MUTE[H]
R3206 R3207
R3219
C3028
DIG2
Q4002
CTL[+]
IC3004
R3236
V.PULSE
D.FF
SW12V
GND
SW5V
GND
A.MUTE[H]
R4006
R4004
R3227
A.FF
AL5V
GND
C3042
C3024 C3025
R3018
V_TO_OSD
AL5.8V_SYS
R4022
C3041
C4016
C4017
R3017
C3043
N.REC[H]
R3031
R3215
R3213
48V
C3035
C4014
R4021
TP4001
AGC_CTL
R3232
VIDEO_ENV
R4024
C3045
DIG3
S3001
C3019
C3036
C4019
C4008
V_FROM_OSD
I2C_DATA_A/V
DIG4
DIG5
R3237
I2C_CLK_A/V
R3238
CH_SW
D_F
R3032
AFC
B3001
CP4001
C4006
SB_GAIN
H.REC_ST[H]
P.CTL[H]
C3049
C3052
D_E
D_D
D_C
Q3006
D_B
D_A
D_G
KEY1
KEY2
R3042
R3243
R3242
IC3003
R3244
D3016
R3245
C3004
C3011
0.022
3.3k
4.7
10K
10K
2.2K
15K
47
0
2.2k
100p
33
0
33
0.1
33
470
10K
5.6k
0.1
470
15k
0.001
1
1k
4.7k
4.7k
4.7k
4.7k
100
27p
18p
18K
47
0.01
10K
10k
0
0
0
0.01
0
1
0
000
10k
10k
10k
10k
0.22
10k
1
1M
1
220 0.01
18k
180
470
5.6k
0.0022
330k
470k
120 120
10K 10K
10K
4.7k
10k
100P
47 0.01
1k
100P
1k
1k
18k
18k
0.022
100p
100
0.01
4.7k 4.7k
1k
0
0.01
0.01
680
0
330
6.8K
100p
4.7
OPEN
UN5211
PAUSE/COMP
GND
OPEN
OPEN
OPEN
GND
LSA
LSB
LSC
LSD
OPEN
QAX0526-001
OPEN
/6.3
C.FG_IN
CAP.M_Vcc
Vcc5V
CAP.M_F/R
LM_VCTL
M_GND
S_GND
Vcc12
CAP.M_CTL
LM_F/R/S
DRUM_PG/FG
DRUM_VCTL
CP
QMFZ050-1R5X-E
SHORT /16
P20
VDD
SBIO_FRSIS
SBoO_FRSIS
GND
SXi
IRQO
SP_FG
TU_FG
R.PAUSE/COMP_IN
D_B
RC
D_A
NC
D_C
D_D
MODEL_OPTION3
D_F
D_G
NC
N_REC[H]
AGC_CTL
I2C_DATA_A/V
I2C_CLK_A/V
REC_SAFETY
D.FF
V.PULSE
RESET
A.FF
N.REC_ST[H]
H.REC_ST[H]NCNC
I2C_CLK/TEST
CAP_CTL_V
DRUM_CTL_V
A.MUTE[H]
VDD
X_OUT
X_IN
VSS
XC_IN
XC_OUT
CLK_SEL
COV_CTL[H]
P20
VIDEO_OSD_OUT
VSS2
V_TO_OSD
SYN_IN
VDD2
AFCC
AFCLPF
FSCI
FSCLPF
NC
CTL_GAIN
START_SENSOR_DEL
P.CTL[H]
MODEL_OPTION1
LM_F/R/S
CAP.M_F/R
MODEL_OPTION2
D_E
D.FG_IN
C.FG_AMP_OUT
C.FG_IN
AMP_VREF_OUT
AVSS
AMP_C
AVCC
CTL[+]
CTL[-]
AMP_VREF_IN
CTL_AMP_OUT
PROTECT
END_SENSOR
AFC/JUST_CLK
LED
A.ENV/ND[L]
COMP_OUT
VIDEO_ENV
START_SENSOR
JSA
KEY2
POWER_DET
LSD
DIG1
DIG2
DIG3
DIG4
NC
I2C_DATA
DIG5
LSC
NC
CH_SW
KEY1
LSA
JSB
TU_MUTE[H]
REC_LINK_LED
NC
EEPROM_DET
LSB
SW_PT_ADJ
OPEN
OPEN
OPEN
OPEN
/16
CP
NMFZ012-1R0X-M
CP
SHORT
/10
OPENOPEN
QAX0444-001
OPEN
OPEN
OPEN
/6.3
PTZ-NV16A
/50
OPEN
2SC4081/QRS
/50
/6.3
OPEN
OPEN
11ES2
OPEN
PTZ-NV16A
OPEN
1/4W
OPEN
LNB2301L01VI
OPEN
1SS133
RPI-304 RPI-304
OPEN
2SD1819A/QRS
SDA
SCL
WP
VCCA0
A1A2VSS
OPEN
OPEN
/6.3
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
OPEN
QSW0602-004
/6.3
OPEN
CP
SHORT
2SC4081/QRS
OPEN
OUT
VDDNC
GND
OPEN
MTZ3.9B
/50
SB GAIN
#
#
#
#
##
#
#
#####
#
#
#
#
#
##
##
#
## ##
#
## ##
##
## ##
#
GND[M]
32kHz
REC.SAFE.SW
FLASH WRITER
R.PAUSE
TO
CAP_MDA
TO
START
SENSOR
TO
REEL SENSOR REEL SENSOR
SUPPLY TAKE UP
TUNER
TO VIDEO/N.AUDIO
TO VIDEO/N.AUDIO
TO VIDEO/N.AUDIO,FMA/DEMOD
TO TERMINAL
TO
TO
SW.REG
END SENSOR
14.32MHz
TO
FRONT
MAIN[SYSCON]
03
CTL.P
TO FMA/DEMOD
ROTARY ENCODER
TO
OPEN
OPEN
##MARKED SYMBOLS ARE NOT MOUNTED
With EEPROM
No EEPROM
IC3004, C3023
R3131 R3136
With Start Sensor
No Start Sensor
Q3001, R3210
J691U, J691UC, J694U
R3132 R3137
J698UC(with A/B code)
M_OPT1 R3135R3139 R3138
CP3002 is OR part of CP3001.
CP4002 is OR part of CP4001.
J695UC(with child lock)
Model_4
Model_5
Model_6
Model_7
Model_8
Max. 8
models
R3134 R3133R3140M_OPT2M_OPT3
0
1
0
0
0
1
1
1
0
0
1
1
0
1
0
0
1
1
0
0
0
1
1
1
# DIFFERENCE TABLE
: Used
: Not used
Page 38

4-9 4-10
4.4 MAIN (SW.REG) SCHEMATIC DIAGRAM
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p20232001a_rev0
48V
AL5.8V_SYS
R5101
R5104
C5101
D5303
C5204
D5001
C5103
SW12V
P.CTL[H]
K5102
R5102
R5313
R5312
GND
R5103
Q5301
C5104
D5102
Q5101
C5206
D5105
SW5V
C5001
R5112
Q5304
C5305
C5301
D5101
D5207
Q5305
D5302
D5203
K5101
R5304 C5302
D5305
R5310
R5302
C5303
R5306
PC5101
R5305
LF5002
C5006
Q5306
R5107
R5303
R5110
BT2
C5107
R5106
Q5102
T5001
C5105 R5109
D5210
C5203
C5202
D5301
L5202
L5201
C5004
D5103
R5108
F5001
CN5001
C5207
C5102
VA5001
R5001
R5113
M12V
Q5321
D5204
220k
68k
0.0047
4.7
220k
820
1k
68k
1
47
0.047
220
0.1
100
470 2.2
10k
1k
100
180
220
47
330
1.2k
220k
0.1
0.39 0.018 680
1000
1000
33µ
33µ
0.0047
1.2k
1.25A
100
100p
4.7M
1M
2W
/1k
MTZJ5.6A
RD5.6ES/B1
/100
S1WB/A/60-4102
S1WB/A/60-X
S1WB(A)60F4072X
SHORT
2SC1740S/RS/
2SC3199/YG/
/50
11ES2
1A3G
ERA15-02
2SK2043
/16
1SS133
1SS270A
/250
MY
2SD2144S/UV/
/50
MY
/16
AU01
1SR153-400
ERA18-04
10ELS4
AK04
11EQS04
1S4
DTA114EUA
UN5111
RN2302
PDTA114EU
MTZJ12A
RD12ES/B1
AU01Z
10ELS2
QQR0678-001Z
QQR0678-001
QQR0621-001Z
/50
MTZJ5.6C
RD5.6ES/B3
/16
PC817X
PS2501-1
ON3131/RS/
PC817
K1010/B/
QQR0532-001
QQR0533-001
QQR0516-001
QQR0816-001
QQR0932-001
/200
DTC114EUA
UN5211
RN1302
PDTC114EU
1/2W
/50
MY
1W
2SD2144S/UV/
QQS0083-001
QQS0093-001
QQS0084-001
QQS0120-001
/50
MY
AU01Z
1SR153-400
ERA18-02
10ELS2
PG104RS
/10
/16
MTZJ15C
RD15ES/B3
/250
1SS133
1SS270A
/250
/16
QAF0023-431Z
QAF0039-431Z
QAF0024-431Z
QAF0055-431Z
1/2W
2SD1858/QR/
AU01Z
10ELS2
##
D
G
S
##
##
BRN
LIVE
NEUTRAL
BLU
3
0
MAIN[SW.REG]
## PARTS ARE NOT MOUNTED
TO SYSCON
TO SYSCON
TO SYSCON
TO SYSCON
TO VIDEO/N.AUDIO, SYSCON,
TUNER, FMA/DEMOD
TO VIDEO/N.AUDIO, SYSCON,
TUNER, FMA/DEMOD, TERMINAL
TO VIDEO/N.AUDIO, SYSCON,
TUNER, FMA/DEMOD, TERMINAL
TO TUNER
DANGEROUS VOLT A GE
GROUND POINT FOR
SECONDARY VOLTAGE
GROUND POINT FOR
PRIMARY VOLT A GE.
Page 39

4.5 MAIN (TUNER) SCHEMATIC DIAGRAM
4-11 4-12
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p10378001a_rev0
OPEN
## MARKED SYMBOLS ARE NOT MOUNTED.
TU6001
TU6001
COMP
BT2
SW12V
SW5V
GND
I2C_DATA
I2C_CLK
R6030
B6030
R6050
L6003
R6031
C6006
C6005
D6002
C6531
CONV_CTL[H]
TU_MUTE[H]
CH_SW
C6053
C6052
C6022
C6020
SIF
Q6030
Q6031
R6034
C6033
R6020
AFC
R6021
C6021
R6503
RF_AUDIO
R6504
GND
TU_VIDEO
RF_VIDEO
L6050
C6013
C6012
C6008
C6007
L6001
R6054
3.3K
0
SHORT
0
0.01
10
0.01
100p
1M
0.001
1k
1k
15k
10K
SHORT
0.01
10
1200SHORT
1K
/50
HZ30-2L
2SB1218A/QR
2SA1576A/QR
2PA1576/R
DTC114E
/16
/10
##
##
##
##
##
##
##
##
##
##
####
##
##
##
##
##
TO
SYSCON
TO SW REG.
ANT IN ANT OUT
ANT IN ANT OUT
ALPS/LG/SANYO
MATSUSHITA
TO FMA/DEMOD
(RF AGC)
NC(GND)
AUDIO IN
CH SW
MOD B(SW5V)
CONV.CTL(H)
VIDEO IN
NC(GND)
(BT)
AS
SCL
SDA
NC(5V)
MB(SW5V)
LOCK(L)
TU(30V)
IF OUT
IF IN
NC
NC
AUDIO OUT
(SIF OUT)
AFT
NC(OPEN)
VIDEO OUT
NTSC
0 3 TUNER[MAIN]
AUDIO IN
CH SW
MOD B(SW5V)
CONV.CTL(H)
VIDEO IN
(RF AGC)
MB(SW5V)
AS
SCL
SDA
NC
NC
LOCK(L)
NTSC
TU(30V)
TP
IF OUT
AUDIO OUT
SIF OUT
AFT
VIDEO OUT
TO VIDEO/N.AUDIO
TO TERMINAL
TO VIDEO/N.AUDIO
Page 40

4-13 4-14
4.6 MAIN (FMA/DEMOD) SCHEMATIC DIAGRAM
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p20230001a_rev0.1
IC2201
C2208
C2257
C2256
C2253
C2252
C2251
C2207
C2206
C2205
C2204
C6503
C2203
C6502
C2202
C2201
C6501
C6514
C2221
C2220
C6515
C2219
C2218
C2215
C6513
C2214
C6512
C6509
C6508
C6504
C6516
C2209
C2210
C2211
R2255
NA_PB
R2252
GND
NA_REC
SW5V
SW12V
D2251
C2216 C2217
R2216
SIF
GND
L2251
L2201
R2257
H.REC_ST[H]
A.FF
A.MUTE[H]
R2251
RF_AUDIO
A.ENV/ND[L]
C2213
C2231
OPEN
C2230
OPEN
R2231 OPEN
R2230 OPEN
C2212
I2C_CLK
I2C_DATA
C2254C2255
FMA_CH1
FMA_COM
FMA_CH2
L6501
C6510 C6511
R2215
R2209
R2214
LINE_OUT[R]
R2201
LINE_OUT[L]
F.AUDIO[L]
F.AUDIO[R]
TP2253
R2205
R2206R2202
R2253
Q2203
Q2204
R2210
R2217
R2219
R2218
R2213
Q2201
Q2202
R2220
C6505
C6506
C2261
COMP
LED
C2222
Fsc
R2211
R2212
D2201
C2259
C2262
R6502C6517
0.015
0.01
0.01
0.01
0.01
0.01
0.015
10
10
33
1
4.7
10
4.7100.1
0.022
0.022
10
3.3
22
10
10
2.2
10
0.022
0.1
0.022
0.1
4.7
10
10
33
27k
3.3K
47
1K
10µ
680K
4.7K
47
470.01
220
100
100
47k
47k
6.8k6.8k
100
4.7k
4.7k
1K
3.9K
4.7k
1k
1
0.01
3.3K
3.3K
0.33
3.3k0.22
AN3663FBP
/25
/25
/16
/50
/50
/25
/50
/25
/25
/50
/16
/25
/25
/50
/25
/50
/25
/25
/16
1SS133-T2
1SS270A-T2
/16 OPEN
SHORT
OPEN
/6.3
/6.3
SHORT
2SC4081/QRS/
2SC4081/QRS/
DTA144WUA
DTC144WUA
/50
OPEN
OPEN
/50
OPEN
## ##
##
MAIN(FMA/DEMOD)0
TO SYSCON
TO
TO TUNER
TO SW.REG
3
BS_IN(R)
EXT3_IN(R)
BS_IN(L)
EXT3_IN(L)
Spectral_DET2
1/2Vcc
IN_REF(R)
Wide_band_timing
EXT1_IN(R)
EXT2_IN(R)
GND1(L)
IN_REF(L)
Wide_band_DET
EXT1_IN(L)
EXT2_IN(L)
WET(L)
NR_DET(L)
NR_REF(L)
CCA_OUT(L)
REC(+)DCF
COM
CH2
GND(P/R)
CH1
Vcc(P/R)
REC(-)DCF
AFF
ENV
PRE_OUT
PB_FM_IN
NOISE_DET
CCA_OUT(R)
REF(R)
NR_DET(R)
WET(R)
MUTE_CTL
REC_AGC_ADJ
GND1(R)
PE
Vcc(1)
GND(LOGIC)
CLK
DATA
dbx_REF
fsc_IN
STEREO_PLL
DEM_REF
SIF_IN
Pilot_DET
SAP_Noise_DET
Vcc(MTS)
SAP_DET
LINE_OUT(R)
L+R_REF
GND2
LED
LINE_OUT(L)
Vcc2(12V)
RFC_OUT
RFC_AGC_DET
NORMAL_OUT
NORMAL_IN
Spectral_DET1
Spectral
timing
NR
TO
VIDEO/N.AUDIO
VIDEO/N.AUDIO
## MARKED SYMBOLS ARE NOT MOUNTED.
Page 41

4-15 4-16
4.7 MAIN (FRONT) SCHEMATIC DIAGRAM
HGFEDCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p20231001a_rev0
OPEN
TP7001
S7008 S7017
REC_LINK
R7015
R7155
FW7104
J7105
Q7006
R7046
KEY2
C7014
C7012
D_G
D_F
D_E
AL5V
GND
D_D
C7011
D_C
D_B
D_A
DIG5
Q7002
DIG4
Q7003
Q7007
Q7008
DIG3
C7042
DIG2
Q7009
CN7001
Q7010
DIG1
S7018
TPGND
R7024
R7037
S7012 S7013
R7034
IC7002
GP1U291Q
R7023 R7035
C7041
IC7042
R7001
R7002
R7003
R7004
R7005
R7006
R7007
RC
B7011
S7011S7004
C7013
JSB
JSA
S7016
R7022
R7020
R7033
S7006S7002
DI7001DI7001
R7036R7032R7031
R7030
Q7004
Q7005
Q7001
Q7013
S7010 S7019
KEY1
Q7012
D7009
D7010
R7008
Q7011
0
100
0.01
220
2.2k1.8k
220
330
330
330
330
330
330
330
0.01
1.2k
10k
2.2k1.8k1.2k
10k
330
REC OPEN
PAUSE/COMP
GND
C.BOX_CTL
PU60612
PU61012
DTC143TUA
OPEN
OPEN
/6.3
DTA143TUA-X
DTA143TUA-X
DTC143TUA
DTC143TUA
OPEN
DTC143TUA
JSA
GND
JSB
b5/KEY_OUT
DTC143TUA
OPEN
OPEN
OPEN STOP/EJECT
OPEN
VCC
V.OUT
GND
OPEN
/6.3
VCC
V.OUT
GND
PLAYREW/CH-OPEN FF/CH+POWER
D5
Da
D4
D3
D2
D1
Dg
Df
De
Dd
Dc
Db
OPEN
DTA143TUA-X
DTA143TUA-X
DTA143TUA-X
DTC144WUA
PAUSE/CH OPEN
DTC143TUA
SLR-325VC-T
SLR-325VC-T
DTC143TUA
##
##
##
##
##
##
##
##
##
##
##
########
SHUTTLE/PLAY
MAIN[FRONT]
03
D5
9
SYSCON
TO
TO
JOG/SHUTTLE
9
MINI FRONT PWB
D1
Da
Df
D2
De
D3
Dc
Dd
D4
Dg
Db
R.PAUSE
R.PAUSE
## MARKED SYMBOLS ARE NOT MOUNTED.
Page 42

4-17 4-18
4.8 MAIN (TERMINAL) SCHEMATIC DIAGRAM
DCBA
4
5
3
2
1
The Parts Number,value and rated voltage etc. in the Schematic Diagramare for references only.
When replacing the parts,refer to the Parts List.
Note :
p40042001a_rev0
RF_VIDEO
Q901
R912
FRONT_V_IN
GND
F.AUDIO[L]
F.AUDIO[R]
GND
GND
LINE_OUT[R]
LINE_OUT[L]
GND
C901
L901
R904
R905
GND
C903 C904
R902
R901
J7101
J7101
J7101
J2
V_FROM_OSD
GND
GND
SW12V
75
470
10
330
100
0.001
75
2SA1576A/QRS
/6.31/2W
OPEN
OPEN
(L)
(R)
AUDIO(R)
AUDIO(L)
VIDEO
FRONT VIDEO IN
FRONT AUDIO IN
FRONT AUDIO IN
REAR OUT
TO
VIDEO/N.AUDIO
TO
VIDEO/N.AUDIO
TO SYSCON
TO SW.REG
03
MAIN[TERMINAL]
Delete a short pin(HIFI)
TO TUNER
REF.NO. LOCATION REF.NO. LOCATION REF.NO. LOCATION REF.NO. LOCATION REF.NO. LOCATION
COMPONENTPARTSLOCATIONGUIDE<MAIN> LPB10159-001D
CAPASISTOR
C1 B C 14L
C2 B C 14M
C3 B C 14M
C4 B C 14M
C5 A D 13M
C6 A D 13L
C7 B C 14M
C8 B C 14M
C9 B C 10L
C10 B C10M
C11 B C10M
C12 B C10M
C14 B C11M
C15 B C11M
C16 B C 11L
C17 A D 11L
C19 A D 9M
C20 A D 8L
C21 B C 11L
C22 A D 9L
C23 B C 11L
C24 A D 9L
C25 B C 11K
C26 B C 10K
C27 B C 10K
C28 A D 10L
C29 B C 11K
C30 A D 10L
C31 A D 10K
C32 A D 11K
C33 A D 9L
C34 B C 10J
C35 B C 11K
C36 A D 11I
C37 A D 12I
C38 A D 12J
C39 B C 12J
C40 A D 12J
C51 A D 17C
C62 B C 11L
C120 A D 11J
C136 B C 11M
C144 B C 12J
C201 A D 10G
C202 B C 11G
C203 A D 12G
C205 B C 11G
C207 B C 11F
C901 A D 19L
C903 A D 18K
C904 B C 18L
C2001 A D 12J
C2002 A D 13K
C2003 A D 13K
C2004 B C 13K
C2005 A D13M
C2006 B C12M
C2007 A D13M
C2008 A D12M
C2009 B C12M
C2010 B C12M
C2011 A D11M
C2012 A D12M
C2014 B C 12J
C2051 A D 7M
C2052 A D 17K
C2053 B C 7L
C2054 B C 7L
C2055 A D 7L
C2201 A D 17K
C2202 A D 17L
C2203 A D 17L
C2204 A D 16L
C2205 A D 15L
C2206 A D15M
C2207 B C 15L
C2208 B C 15K
C2209 A D 14K
C2210 A D 14K
C2211 A D 15J
C2212 A D 15J
C2213 B C 15J
C2214 A D 17J
C2215 A D 16J
C2216 A D 16I
C2217 B C 16J
C2218 A D 17J
C2219 A D 17J
C2220 A D 17J
C2221 B C 17J
C2222 B C 14J
C2230 B C 14J
C2231 B C 14I
C2251 B C 15L
C2252 B C 15L
C2253 B C 15L
C2254 A D 15L
C2255 B C 15K
C2256 B C 15L
C2257 B C 14J
C2259 A D 14K
C2261 B C 14L
C2262 B C 15L
C3004 B C 11C
C3007 B C 4I
C3008 B C 18J
C3011 A D 13D
C3013 A D 13D
C3015 B C 12D
C3016 B C 12F
C3017 B C 12F
C3018 A D 12F
C3019 B C 12F
C3020 B C 12F
C3022 B C 13D
C3023 B C 15D
C3024 A D 7C
C3025 B C 7C
C3028 A D 8B
C3029 B C 7B
C3030 A D 7B
C3035 B C 12F
C3036 A D 13F
C3041 B C 12C
C3042 B C 12C
C3043 B C 14D
C3045 B C 15E
C3049 B C 10H
C3052 B C 14F
C3053 A D 9F
C3055 A D 15D
C3056 B C 6K
C3070 A D 12D
C3071 A D 5K
C4001 B C 6L
C4002 A D 6L
C4004 A D 8E
C4006 B C 9F
C4007 B C 9E
C4008 A D 8E
C4009 B C 9E
C4010 A D 8G
C4011 B C 17C
C4012 B C 9F
C4014 B C 9G
C4016 A D 8C
C4017 B C 7C
C4019 B C 10F
C4022 B C 9F
C4031 A D 5K
C5001 A D 1M
C5004 A D 1J
C5006 A D 2J
C5101 A D 1K
C5102 A D 1I
C5103 B C 4J
C5104 A D 3K
C5105 A D 3J
C5107 A D 2I
C5202 A D 2F
C5203 A D 1F
C5204 A D 3F
C5206 A D 1E
C5207 A D 2E
C5301 A D 1D
C5302 A D 3F
C5303 A D 3E
C5305 A D 3G
C6005 A D 19J
C6006 B C 20J
C6007 A D 19J
C6008 B C 19J
C6012 A D 19K
C6013 B C 20L
C6020 B C 20J
C6021 B C 20J
C6022 B C 20K
C6033 B C 19H
C6052 B C 20L
C6053 B C 19L
C6501 B C 17K
C6502 A D 17L
C6503 A D17M
C6504 A D 15I
C6505 A D 15I
C6506 A D 19H
C6508 B C 16J
C6509 B C 16J
C6510 A D 16I
C6511 B C 16I
C6512 B C 16I
C6513 A D 16J
C6514 B C 17K
C6515 A D 17K
C6516 A D 15J
C6517 B C 15I
C6531 B C 19H
C7011 A D 8A
C7012 A D 8A
C7013 B C 16A
C7014 B C 16A
C7041 A D 13A
C7042 A D 13B
CONNECTOR
CN1 A D 15M
CN2001 A D 4L
CN2002 A D 17L
CN3001 A D 6L
CN3010 A D 16B
CN7001 A D 2D
DIODE
D1 A D 16M
D2 A D 16M
D2201 A D 15I
D2251 A D 13J
D3001 A D 11H
D3002 A D 7I
D3004 A D 6C
D3005 A D 7C
D3006 A D 5C
D3007 B C 13C
D3016 A D 13D
D4003 B C 13E
D5001 B C 2K
D5101 A D 1J
D5102 A D 1L
D5103 A D 3J
D5105 A D 3I
D5203 A D 2G
D5204 A D 2G
D5207 A D 1G
D5210 A D 3G
D5301 A D 2F
D5302 A D 3E
D5303 A D 3F
D5305 A D 2E
D6002 A D 19K
D7009 A D 14A
D7010 A D 15A
DI7001 A D 11A
FUSE
F5001 A D 2M
IC
IC1 B C 12K
IC2201 B C 16K
IC3001 B C 11E
IC3003 B C 12D
IC3004 B C 15D
IC7002 A D 7A
IC7042 A D 13A
COIL
L1 A D 14L
L3 A D 9M
L4 A D 9L
L5 A D 12I
L11 A D 10K
L201 A D 10G
L203 A D 12G
L901 A D 18K
L2001 A D 14J
L2201 A D 15J
L2251 A D 14K
L4001 A D 5K
L5201 A D 3F
L5202 A D 1F
L6001 A D 19J
L6003 A D 19K
L6050 A D 19H
L6501 A D 15H
TRANSISTOR
Q22 B C 9L
Q32 B C 8M
Q38 B C 10M
Q901 B C 19K
Q2001 B C 8M
Q2002 B C 12M
Q2003 B C 9M
Q2051 B C 7L
Q2052 B C 7K
Q2053 B C 7K
Q2054 B C 7L
Q2055 B C 7K
Q2201 B C 15H
Q2202 B C 16H
Q2203 B C 16H
Q2204 B C 16H
Q3001 A D 3I
Q3002 A D 18I
Q3004 B C 8B
Q3005 B C 13C
Q3006 B C 13D
Q3007 B C 13D
Q4001 B C 17C
Q4002 B C 7C
Q5101 A D 2I
Q5102 A D 3K
Q5301 A D 3F
Q5304 A D 2E
Q5305 B C 3E
Q5306 B C 4E
Q5321 A D 1E
Q6030 B C 19H
Q6031 B C 19G
Q7001 B C 9A
Q7002 B C 9B
Q7003 B C 10B
Q7004 B C 10B
Q7005 B C 10B
Q7006 B C 10A
Q7007 B C 11A
Q7008 B C 11A
Q7009 B C 11B
Q7010 B C 11B
Q7011 B C 12B
Q7012 B C 12B
Q7013 B C 14B
RESISTOR
R1 B C 11M
R2 B C 10M
R3 B C 10M
R6 B C 11K
R7 B C 10J
R8 B C 11J
R9 B C 11J
R49 B C 9L
R66 B C 9M
R77 B C14M
R78 B C 17F
R90 B C 11L
R93 B C11M
R104 B C 10M
R118 B C 12I
R201 B C 11G
R202 B C 11F
R901 B C 19M
R902 B C 19M
R904 A D 18L
R905 B C 19K
R912 B C 20B
R2003 B C 12J
R2007 B C 13J
R2010 B C 13K
R2013 B C13M
R2014 B C12M
R2015 B C13M
R2016 B C12M
R2017 B C 8M
R2018 B C10M
R2019 B C10M
R2053 B C 7M
R2054 B C 7L
R2055 B C 7K
R2056 A D 7L
R2057 B C 7K
R2058 B C 7K
R2059 B C 7K
R2060 B C 7K
R2201 B C 16L
R2202 B C 16L
R2205 B C 16L
R2206 B C 16L
R2209 B C 17I
R2210 B C 17H
R2211 B C 16I
R2212 B C 16H
R2213 B C 16H
R2214 B C 17J
R2215 A D 17I
R2216 B C 17J
R2217 B C 17J
R2218 B C 17J
R2219 B C 17J
R2220 B C 16H
R2230 B C 14J
R2231 B C 14I
R2251 B C 14K
R2252 B C 15K
R2253 A D 14J
R2255 B C 15J
R2257 B C 14K
R3017 B C 12C
R3018 B C 12C
R3031 B C 13E
R3032 B C 13E
R3042 B C13G
R3091 B C 10D
R3092 B C 10D
R3093 B C 10C
R3094 B C 10C
R3114 B C 9C
R3131 A D 9G
R3132 A D10G
R3133 A D10G
R3134 A D 8H
R3135 A D 8G
R3136 A D 9G
R3137 B C 9G
R3138 B C 9G
R3139 A D 8H
R3140 A D 8H
R3205 B C 6H
R3206 B C 6H
R3207 B C 7H
R3208 B C 7H
R3209 A D 10H
R3210 B C 5I
R3211 B C 16C
R3212 B C 15F
R3213 B C 15F
R3214 B C 8G
R3215 B C 8G
R3216 B C 6I
R3217 B C 7I
R3219 B C 16C
R3220 B C 13D
R3222 B C 13D
R3223 B C 12F
R3224 B C 12F
R3225 B C 12F
R3226 B C 15E
R3227 B C 15E
R3232 B C 9B
R3233 B C 8B
R3234 B C 5C
R3236 A D 13C
R3237 B C 13C
R3238 B C 12C
R3240 B C 5C
R3241 B C 5C
R3242 B C 12F
R3243 B C 13D
R3244 B C 13C
R3245 B C 13D
R3252 B C 6K
R3253 B C 6K
R3254 B C 6L
R3255 B C 6J
R4001 B C 13E
R4002 B C 13F
R4003 B C 9F
R4004 B C 12D
R4006 B C 12D
R4010 B C 10E
R4011 B C 10E
R4012 B C 9E
R4018 B C 9G
R4019 B C 9G
R4021 B C 9G
R4022 B C 7C
R4024 A D 6J
R4026 B C 3D
R4027 B C 2D
R5001 A D 3L
R5101 B C 3K
R5102 B C 4K
R5103 B C 3K
R5104 A D 1L
R5106 A D 1J
R5107 A D 3I
R5108 B C 3J
R5109 A D 3J
R5110 B C 2J
R5112 B C 3I
R5113 B C 3K
R5302 B C 5F
R5303 B C 5F
R5304 B C 3G
R5305 B C 1D
R5306 B C 1E
R5310 B C 3F
R5312 B C 4F
R5313 B C 4F
R6020 B C 19J
R6021 B C 19J
R6030 B C19G
R6031 B C 19H
R6034 B C19G
R6050 A D 19L
R6054 B C 19L
R6502 B C 15I
R6503 B C 19H
R6504 B C 19I
R7001 B C 10A
R7002 B C 11A
R7003 B C 11A
R7004 B C 11A
R7005 B C 12A
R7006 B C 12A
R7007 B C 12A
R7008 B C 15B
R7015 A D 8A
R7020 B C 15B
R7022 B C 15A
R7023 B C 4B
R7024 B C 4B
R7030 B C 12A
R7031 B C 4B
R7032 B C 4A
R7033 B C 3B
R7034 B C 4B
R7035 B C 4B
R7036 B C 3B
R7037 B C 2B
R7046 A D 14A
R7155 B C 18C
SWITCH
S3001 A D 17C
S7002 A D 16B
S7004 A D 6B
S7006 A D 5B
S7008 A D 4B
S7010 A D 3B
S7011 A D 2B
S7012 A D 2B
S7013 A D 1B
S7016 A D 16B
S7017 A D 15B
S7018 A D 7B
S7019 A D 7B
TESTPOINT
TP106 A D 19F
TP111 A D 19F
TP2253 A D 20F
TP4001 A D 19F
TP7001 A D 2A
TPGND A D 3A
OTHER
CP3001 B C 3E
CP3002 A D 3E
CP4001 B C 3E
CP4002 A D 3E
FC5001 A D 2M
FC5002 A D 1M
FW3001 A D 18H
FW7104 A D 18C
J2 A D 19M
J7101 A D 19A
J7105 A D 19C
JS3001 A D 6G
LF5002 A D 2L
PC0324 A D 11J
PC3001 A D 14F
PC3002 A D 8F
PC5101 A D 4J
T2051 A D 7L
T5001 A D 1I
TU6001 A D20M
VA5001 A D 2M
VR4028 A D 1D
X2 A D 11J
X3001 A D 12F
X3002 A D 12F
Page 43

4-19 4-20
4.9 MAIN CIRCUIT BOARD
E
B
1
START
SENSOR
714
POWER
AUDIO
IN[R]
IN[L]
AUDIO
867
4
3
5
2
VIDEO
IN
1
13
1
2
12
16
17
48
32
33
1
81
80
51
50
31
30
AV OUT
1
2
4
6
1
2
SENSOR
END
1
8
REC.S
25
26
50
51
76
75
100
1
64
OPEN
OPEN
OPEN
STOP/EJECT
PLAY
FF/CH+ REW/CH-
OPEN
OPEN
49
1
6
11
2
1
TAKE UP
21
2
1
4
3
E
5
4
7
6
2
1
NEUTRAL
TEST
S
G
5
LIVE
SUPPLY
3
4
2
1
D
B
SW-PT-ADJ
31
12
7
1
PAUSE/CH
REC
15
V1
100
T5001
C5001
C5006
C5101
C5103
C5104
C5105
C5202
C5203
C5206
C5207
C5301
R2257
C6012
C6013
D5001
D5101
C6022
D5207
D5303
F5001
LF5002
PC5101
Q5101
C5302
Q5305
Q5306
Q3001
R5101
R5106
R5108
R5109
R5113
C903
R5304
R5306
CN3010
FW7104
R6034
C7011
Q3002
R3210
R3131
R7022
R7032
R7024
R3091
DI7001
S7017
JS3001
S7018
B2
PC3001
S7002
S7004
J7101
S7010
S7013
S7011
S7006
S7008
IC7002
S7016
C144
J2
PC3002
R3092
FW3001
S7019
IC3001
C207
R3094
B6030
VR4028
R4026
C202
C901
R3136
C904
C2052
C3008
C3016
C3020
C3022
C3025
R3138
C3036
R3139
C3049
R3140
C3053
R3132
R3133
R3134
R3135
C4008
C4010
C4014
C4016
C4022
C6005
C6006
C6020
C6021
C6531
J7105
X2
W2
D3007
D4003
IC3003
IC3004
IC7042
L203
L6001
TP7001
L6003
Q901
Q3004
Q3005
Q4001
Q4002
Q6030
Q6031
TPGND
K5101
Q7001
Q7002
Q7003
Q7004
Q7006
Q7007
Q7008
Q7009 Q7010
Q7011
Q7012
R201
R202
R901
R902
R904
R3017
R3018
R3114
R3209
R3211
R3212
R3215
R3216 R3217
R3223
R3224
R3225
R3226
R3227
R4004
R4010
R4011
R4018
R4019
R4022
R4024
R6030
R6031
R6050
D2251
R7002
R7004 R7005
C3071
X3001
X3002
R3253
R3255
R6503
R118
R3242
D3001
CN2002
IC2201
IC1
C1
C2
C3
C4
C5
C6
C8
C10
C14
C16
C17
C19
C21
C26
C27
C28
C36
C38
C39
C2001
C2003
C2004
C2005
C2006
C2009
C2011
C2014
C2054
C2055
C2202
C2203
C2207
C2210
C2212
C2213
C2215
C2216
C2217
C2218
C2219
C2221
C2222
C2254
C2255
C2259
C6501
C6502
C6505
C6508
C6509
C6510
C6511
C6512
C6515
S3001
D2201
L4
L5
L11
L2251
L6501
Q22
Q32
Q2001
Q2002
Q2003
Q2051
Q2052
Q2053
Q2054
Q2055
Q2201
Q2202
Q2203
Q2204
R1
R2
R7
R49
R66
R77
R78
R2003
R2007
R2015
R2016
R2017
R2053
R2055
R2056
R2057
R2059
R2205
R2210
R2211
R2212
R2216
R2218
R2219
R2220
R2251
R2252
R2253
R2255
R6502
T2051
C2261
D5305
C6517
L4001
C4031
ZZ1
ZZ2
ZZ3
ZZ5
ZZ6
ZZ7
ZZ8
ZZ9
D7009
Q3007
D7010
R3244
Q3006
B1
C120
Q7013
S7012
C7042
C7012
R93
Q38
C15
R2230
R2231
W4
ZZ4
D5302
Q5321
21
B
4
3
1
1
2
24
19
44
18
43
35
32
6
26
1
CTL.P
D.FF
PB.FM
A.PB.FM
49
10
E
5
62
1
UNHZ202
UNHZ202
8
9
4
3
1
2
EB
C5004
C5102
C5107
C5204
C5303
C5305
C6007
C6008
D5102
D5103
D5203
D5204
D5210
D5301
C6052
R7015
R7046
L5201
L5202
Q5102
Q5304
R5001
R5102
R5103
R5104
R5107
R5110
R5302
R5303
R5305
R5310
R5312
R5313
VA5001
B3001
CN7001
C3007
R7020
R7030
R7031
R7036
R7033
R7034
R7035
R912
R7023
C7013
C7014
TU6001
R3042
R3093
C4011
C3035
C4019
C3015
C3023
D1
R4027
C201
C203
C205
C3013
C3017
C3018
C3019
C3024
C3028
C3029
C3030
C3041
C3042
C3043
C3045
C3052
C3055
C4002
C4004
C4006
C4007
C4009
C4012
C4017
C6033
C6053
C6506
C7041
R7155
D2
W1
D3002
D3004
D3005
D3006
D6002
L201
L901
L6050
Q7005
K5102
R5112
D5105
W3
R905
R3031
R3032
R3206
R3207
R3208
R3213
R3214
R3219
R3220
R3222
R3232
R3233
R3234
R3236
R3237
R3238
R3240
R3241
R4001
R4002
R4003
R4006
R4012
R4021
R6020
R6021
R6054
R7001
R7003
R7006
R7007
TP106
TP111
TP2253
TP4001
R3252
R3254
R6504
C136
CN1
CN2001
R8
R9
C4001
C7
C9
C11
C12
C20
C22
C23
C24
C25
C29
C30
C31
C32
C33
C34
C35
C37
CP3001
C40
C51
C62
C2002C2007
C2008
C2010
C2012
C2051
C2053
C2201
C2204
C2205
C2206
C2208
C2209
C2211
C2214
C2220
C2251
C2252
C2253
C2256
C2257
C6503
C6504
C6516
C6513
C6514
L1
L3
L2001
L2201
CP4001
R3
R6
R2010
R2013
R2014
R2018
R2019
R2054
R2058
R2060
R2201
R2202
R2206
R2209
R2213
R2214
R2215
R2217
C2262
C3056
R3205
C3011
C3070
R3243
R3245
D3016
B7011
R7008
C3004
R104
R90
B3
C2230
C2231
Q5301
R3137
CN3001
DANGEROUS VOL TAGE
<03> MAIN
LPB10159-001D
FOR CONTINUED PROTECTIONAGAINST FIRE HAZARD,REPLACE ONLY WITH SAME TYPE AND RATED FUSE(S).
REPLACER PAR DES FUSIBLE DE MEME TYPE.
CAUTION :
ATTENTION :
T
Page 44

4-21 4-22
4.10 REMOTE CONTROLLER SCHEMATIC DIAGRAM
CANCEL/C.RESET
ENTER/OSD
TV CH
TV CH
TV VOL
TV VOL
TV/VCR
9+27
SP/LP
POWER
(
PAUSE
)
(
PLAY
)
4
STOP
START
STOP
CH
START
(
REW
)
CH
DISPLAY
SKIP SEARCH
PROG CHECK
-
+
MAIN/SUB
MUTE
TV/POWER
REC PAUSE
REC START
OK
RE-VIEW
3
TV/VCR
6
2
5
DATE
MENU
DATE
TV
PROG
1+22
1+23
1+40
1+38
1+37
1+26
1+36
1+30
9+32
48
47
46
45
44
43
42
P32
P31
P30
P24
P23
P22
P21
TST
KI/04
VDD
P33
P11
P10
P03
P02
P01
P00
XO
XI
VSS
46
48
47
45
44
43
42
38
40
37
36
35
34
32
30
31
29
27
26
28
24
23
22
21
20
19
18
16
15
14
13
12
11
10
9
7
8
5
4
1
2
3
6
X1
IC1
R2
R1
TIMER
8/ DAILY(M-F)
7
1
9/WEEKLY
(LP20878-001#, 020#)
0 /AUX
(
REC
)
(
STOP
)
(FF)
A.MONITOR/
(
MUTE
)
/
COMMON ANODE DIGIT1
COMMON ANODE DIGIT2
COMMON ANODE DIGIT3
COMMON ANODE DIGIT4
COMMON ANODE K3,K2,K5,K4,K1,K6,I,J
CATHODE 1B,2B,3B,4B,K2
CATHODE 1C,2C,3C,4C,K5
CATHODE 2D,3D,4D,K4
CATHODE 2E,3E,4E,K1
CATHODE 2F,3F,4F,K6
CATHODE 2G,3G,4G,I,J
12
11
10
9
8
7
6
5
4
3
2
1
No. CONNECTION
E
D
CE
F
DIGIT 1
G
C
B
DIGIT 2
A
DD
F
G
C
E
B
F
DIGIT 3
A
G
C
B
DIGIT 4
A
CATHODE 2A,3A,4A,K3
GRID ASSIGNMENT
ANODE CONNECTION
K6
K3
K5
K2
K4
K1
B
I
J
4.11 FDP GRID ASSIGNMENT AND ANODE CONNECTION
4.12 WAVEFORMS
WF3
IC1-1
PB 0.4 Vp-p
20 mV/5 msec/DIV
WF8
IC1-11
REC/PB 0.48 Vp-p
20 mV/10 sec/DIV
WF7
IC1-13
REC/PB 0.48 Vp-p
20 mV/10 sec/DIV
WF9
IC1-16
REC 1.0 Vp-p
20 mV/10 sec/DIV
WF1
IC1-27
REC/PB 2.2 Vp-p
50 mV/10 sec/DIV
WF6
IC1-85
REC 2.0 Vp-p
50 mV/2 msec/DIV
WF5
TP111
D.FF
REC/PB 3.5 Vp-p
0.1 V/10 msec/DIV
WF4
TP106
PB.FM
PB 0.4 Vp-p
20 mV/5 msec/DIV
WF2-1
REC 4.0 Vp-p
0.1 V/0.2 msec/DIV
WF2-2
PB 1.0 Vp-p
20 mV/0.2 msec/DIV
WF1
REC 0.45 Vp-p
20 mV/0.5 msec/DIV
WF3
IC2201-21
REC 1.0 Vp-p
50 mV/2 msec/DIV
WF4
PB 1.0 Vp-p
50 mV/0.5 msec/DIV
< AUDIO >
IC2201-53
IC2201-53
WF5
REC 1.4 Vp-p/PB 1.5 Vp-p
50 mV/0.5 msec/DIV
WF6
REC 0.5 Vp-p
10 mV/0.2 msec/DIV
IC1-53
IC1-63
IC2201-9
TP2253
A.PB.FM
WF3
TP4001
CTL.P
PB 2.7 Vp-p
50 mV/5 msec/DIV
WF4
REC 4.0 Vp-p
0.1 V/10 msec/DIV
< SYSCON >
< VIDEO >
WF5
REC/PB 2.2 Vp-p
50 mV/10 sec/DIV
WF6
REC/PB 2.2 Vp-p
50 mV/10 sec/DIV
IC3001-49
V_TO_OSD
IC3001-47
VIDEO_OSD_OUT
IC3001-74
CTL_+
WF7
REC 2.1 Vp-p
50 mV/0.2 msec/DIV
IC1-99
WF2
IC1-30
PB 0.7 Vp-p
20 mV/10 µsec/DIV
µ
µ
µ
µ
µµ
WF1
CN3001-1
CAP_M_FG
REC/PB 4.6 Vp-p
1 V/0.5 msec/DIV
WF2
CN3001-11
D. PG/FG
REC/PB 4.5 Vp-p
1 V/5 msec/DIV
Page 45

4-23 4-24
4.13 VOLTAGE CHARTS 4.14 CPU PIN FUNCTION
PIN NO. LABEL IN/OUT FUNCTION
1 SP_FG IN
2 TU_FG IN
3
R.PAUSE/COMP_IN
IN
4NC
NC
NC
NC
NC
NC
NC
5RC IN
6 D_A OUT
7 D_B
8 D_C
9 D_D
10 D_E
11 D_F
12 D_G
13
14
15 N. REC[H] OUT
16 AGC_CTL IN
17 I2C_DATA_A/V IN/OUT
18 I2C_CLK_A/V OUT
19
20
21 SB_GAIN OUT
22 REC_SAFETY IN
23 D.FF OUT
24 V.PULSE OUT
25 RESET 26 A.FF OUT
27 N.REC_ST(H) OUT
28 H.REC_ST(H) OUT
29
30
IN/OUT
31 I2C_DATA
32 I2C_CLK/TEST OUT
33 CAP_CTL_V OUT
34 DRUM_CTL_V OUT
35 A.MUTE(H) OUT
36 VDD 37 X_OUT 38 X_IN 39 VSS 40 XC_IN 41 XC_OUT -
-
42 CLK_SEL
43 CH_SW
44
TU_MUTE[H]
45 P20
46 CONV_CTL[H] IN
47 VIDEO_OSD_OUT OUT
48 VSS2 49 V_TO_OSD
50 SYS_IN IN
IN
.
51 VDD2 52 AFCC IN
IN
53 AFCLPF OUT
OUT
54 FSCI
55 FSCLPF
56 NC
57 CTL_GAIN OUT
58 START_SENSOR_DEL
59 P.CTL [H] OUT
60 MODEL_OPTION1
MODEL_OPTION2
MODEL_OPTION3
61 LM_F/R/S OUT
62 CAP. M_F/R OUT
63
64
65 D.FG_IN IN
66 EEPROM_DET
67 C. FG_AMP_OUT OUT
68 C.FG_IN IN
69 AMP_VREF_OUT OUT
70 AMP_VREF_IN IN
71 AVSS 72 AMP_C IN
73 AVCC 74 CTL(+) IN/OUT
75 CTL(-) IN/OUT
76 CTL_AMP_OUT OUT
77
78
PROTECT IN
79
END_SENSOR END SENSORIN
80
AFC/JUST_CLK
LED
IN
IN
81 A. ENV/ND [L] IN
82 COMP_OUT
83 VIDEO_ENV IN
IN
84
85 START_SENSOR
OUT
86 JSA IN
87 JSB IN
88 KEY1 IN
89 KEY2 IN
90 POWER_DET
91 LSA
92 LSB
IN
93 LSC
94 LSD
95 DIG1
96 DIG2 OUT
OUT
97 DIG3 OUT
98 DIG4 OUT
99 DIG5 OUT
100 REC_LINK_LED
PIN NO. LABEL IN/OUT FUNCTION
<SYSCON IC3001>
IN
START SENSOR
INPUT FOR THE JOG SHUTTLE
INPUT FOR THE JOG SHUTTLE
DETECTION SIGNAL FOR SWITCHING POWER SUPPLY
TUNING CHECK/JUST CLK INPUT
SAP DETECT
AUDIO PB FM ENV. INPUT/NON HiFi MODEL:L
A/V COMPULINK OUTPUT
AUTO TRACKING DETECT/INPUT THE AVERAGE OF PLAYBACK VIDEO SIGNAL
INPUT FOR VALUE OF SWITCHING POINT ADJUSTMENT
SW_PT_ADJ
OPERATION CONTROL SIGNAL
OPERATION CONTROL SIGNAL
MECHANISM MODE DETECT(A)
IN
DETECTION SIGNAL FOR POWER DOWN OF AC POWER SUPPLY
IN
MECHANISM MODE DETECT(B)
IN
MECHANISM MODE DETECT(C)
IN
MECHANISM MODE DETECT(D)
LED DRIVE
LED DRIVE
DETECTION SIGNAL FOR SUPPLY REEL ROTATION/TAPE REMAIN
DETECTION SIGNAL FOR TAKE-UP REEL ROTATION/TAPE REMAIN
OUT
LED DRIVE
OUT
LED DRIVE
OUT
LED DRIVE
OUT
LED DRIVE
OUT
LED DRIVE
OUT
LED DRIVE
LED DRIVE
LED DRIVE
LED DRIVE
LED DRIVE
CONTROL SIGNAL(+)
SYSTEM POWER FOR ANALOG CIRCUIT
CAPACITOR CONNECT TERMINAL FOR CTL AMP CIRCUIT
AMP CIRCUIT REFERENCE VOLTAGE INPUT
CTL PULSE OUTPUT
AMP CIRCUIT REFERENCE VOLTAGE OUTPUT
SET-UP OUTPUT FOR CAPSTAN FG AMPLIFICATION FACTOR
CAPSTAN FG PULSE INPUT
DRUM FG PULSE INPUT
SETTING OF EEPROM (ENABLE:L, DISABLE:H)
CONTROL AMP OUT FREQUENCY RESPONSE SWITCHING
CONTROL SIGNAL FOR SWITCHING POWER SUPPLY
CAPSTAN MOTOR DRIVE
MODEL SWITCH 3
MODEL SWITCH 2
MODEL SWITCH 1
SETTING OF START SENSOR (ENABLE:L, DISABLE:H)
LOADING MOTOR DRIVE
FILTER INPUT FOR HORIZONTAL SYNCHRONIZING OF OSD CHARACTER
FILTER OUTPUT FOR HORIZONTAL SYNCHRONIZING OF OSD CHARACTER
SYSTEM POWER
-
-
-
-
-
-
NC
FSC INPUT FOR OSD
FSC OUTPUT FOR OSD
SYSTEM POWER
AUDIO MUTE CONTROL (MUTE ON:H)
OUT
OUT
TUNER AUDIO MUTE CONTROL (MUTE:H)
R/F CONVERTER ON/OFF CONTROL
IN
SELECT FOR BACKUP METHOD(LITHIUM OR E.CAPACITOR):H
COMPOSITE VIDEO SIGNAL OUTPUT
COMPOSITE VIDEO SIGNAL INPUT
SERIAL DATA TRANSFER CLOCK FOR MEMORY IC/MECHANISM TEST SIGNAL
HiFi AUDIO REC START:H
NORMAL AUDIO REC START:H
NORMAL AUDIO REC MODE(REC:H)
AUDIO FF OUTPUT
RESET TERMINAL
-
NC
-
NC
-
NC
-
NC
-
NC
-
NC
-
NC
V.PULSE ADDITION TIMING CONTROL
VOLTAGE CONTROL SIGNAL FOR VIDEO FREQUENCY RESPONSE
SERIAL DATA TRANSFER OUTPUT FOR MEMORY IC
SERIAL DATA TRANSFER OUTPUT FOR THE VIDEO/AUDIO IC
DETECTION SIGNAL FOR AGC
SERIAL DATA TRANSFER CLOCK FOR THE VIDEO/AUDIO IC
CAPSTAN MOTOR CONTROL
DRUM MOTOR CONTROL
GND FOR ANALOG CIRCUIT
CONTORL SIGNAL(-)
MAIN SYSTEM CLOCK (14.32MHz)
MAIN SYSTEM CLOCK (14.32MHz)
TIMER CLOCK(32.768MHz)
TIMER CLOCK(32.768MHz)
RF CHANNEL SWITCHING
GND
REMOTE CONTROL DATA INPUT
REMOTE PAUSE CONTROL/A/V COMPULINK INPUT
GND
NC
-
NC
REC SAFETY SWITCH DETECT (SW ON:L)
ROTATION DETECTION SIGNAL FOR DRUM MOTOR/TIMING
CONTROL SIGNAL FOR REC
COMPOSITE SYNCHRONIZING SIGNAL FOR SERVO, VERTICAL
SYNCHRONIZING SIGNAL FOR OSD
MODE
REC PLAY
PIN NO.
MODE
REC PLAY
PIN NO.
MODE
REC PLAY
PIN NO.
MODE
REC PLAY
PIN NO.
<MAIN>
IC1
1 2.1 2.1
2 2.8 2.8
3 2.5 2.5
4 1.9 1.4
500
6 2.4 2.4
700.7
800
900
10 2.4 2.4
11 3.1 3.1
12 2.7 2.7
13 3.1 3.1
14 2.3 2.3
15 0 0
16 2.8 2.8
17 1.4 1.4
18 2.8 2.8
19 2.7 2.8
20 0 2.8
21 2.0 1.9
22 0 2.8
23 2.8 2.8
24 5.0 5.0
25 0.3 0.3
26 0 0
27 2.3 2.3
28 0 0
29 1.8 0
30 2.1 2.1
31 0 0
32 2.5 2.5
33 5.0 5.0
34 2.7 1.0
35 5.0 5.0
36 2.5 0
37 2.3 2.2
38 2.8 2.8
39 1.5 1.2
40 1.6 1.6
41 2.4 2.4
42 0 2.1
43 0 0
44 2.2 2.2
45 4.3 4.3
46 4.6 4.3
47 2.8 2.8
48 2.5 2.6
49 5.0 5.0
50 2.5 2.5
51 2.8 0
52 0 0
53 2.5 2.6
54 0 0
55 0 0
56 0 0
57 0 0
58 0 0
59 0 0
60 0 0
61 0 0
62 0 0
63 0 0
64 0 0
65 0 2.0
66 0 0
67 0 0
68 0 0
69 0 0
70 0 0
71 0 0
72 0 0
73 3.0 3.0
74 0 0
75 0 0
76 0 0
77 0 0
78 0 0
79 5.0 5.0
80 5.0 5.0
81 0 0
82 0 0
83 0 0
84 2.2 2.2
85 0 2.2
86 0 0
87 0 0
88 0 0
89 0 0
90 0 0
91 0 0
92 2.5 0
93 0 0.4
94 0 0
95 2.5 2.5
96 2.5 0
97 2.5 0
98 0 0
99 0 0
100 0 0
IC2201
1 2.4 2.4
200
3 2.4 2.4
400
5 2.3 2.3
6 2.5 2.5
7 2.0 2.0
8 0.4 0.4
900
10 0 0
11 0 0
12 2.0 2.0
13 2.2 2.2
14 0 0
15 0 0
16 2.5 2.5
17 0.7 0.7
18 2.4 2.4
19 2.5 0
20 2.0 0
21 1.9 0
22 2.0 0.7
23 0 0
24 2.0 0.7
25 5.0 5.0
26 2.0 0
27 0 0
28 4.3 2.2
29 4.4 1.9
30 4.9 1.0
31 1.1 1.9
32 2.5 2.5
33 2.5 2.5
34 0.7 0.7
35 2.6 2.6
36 0 0
37 1.6 1.6
38 0 0
39 0 0
40 5.0 5.0
41 0 0
42 5.0 5.0
43 4.9 4.9
44 2.3 2.3
45 0 0
46 3.6 3.6
47 1.5 1.5
48 2.2 2.2
49 3.5 3.5
50 3.5 0
51 0 5.0
52 3.5 0
53 4.4 0
54 2.4 0
55 0 0
56 0 0
57 4.4 0
58 9.3 9.3
59 4.4 4.4
60 0 0
61 2.5 2.5
62 2.4 0
63 2.4 2.4
64 0.5 0.8
IC3001
1 2.5 2.5
2 2.5 2.5
3 4.7 4.7
4-5 4.7 4.7
6 1.9 2.5
7 3.2 3.2
8 3.2 3.8
9 2.5 1.9
10 2.5 2.5
11 1.2 3.2
12 1.2 1.9
13 - 14 - 15 4.8 0
16 0 0
17 4.6 4.4
18 4.3 4.3
19 - 20 - 21 2.7 2.8
22 4.8 4.8
23 2.4 2.3
24 0 0
25 4.8 4.8
26 0 2.4
27 4.8 0
28 4.5 0
29 - 30 - 31 4.5 4.6
32 4.6 4.6
33 2.6 2.6
34 2.5 2.6
35 0 0
36 4.8 4.8
37 2.3 2.3
38 2.2 2.2
39 0 0
40 1.7 1.7
41 2.4 2.4
42 4.8 4.8
43 0 0
44 4.8 4.8
45 0 0
46 0 0
47 1.6 1.6
48 0 0
49 1.6 1.6
50 2.4 2.4
51 5.0 5.0
52 2.5 2.5
53 0 2.5
54 0 0
55 0 0
56 - 57 4.7 4.7
58 0 0
59 4.7 4.8
60 0 0
61 2.5 2.5
62 0 0
63 4.8 4.8
64 0 0
65 1.3 1.3
66 0 0
67 2.4 2.4
68 2.4 2.4
69 2.4 2.4
70 0 2.4
71 0 0
72 2.4 2.4
73 4.8 4.9
74 2.2 2.4
75 1.9 2.4
76 2.4 2.4
77 4.4 4.4
78 4.7 4.7
79 4.7 4.8
80 0 0
81 4.2 0.1
82 0 0
83 0 5.1
84 0 0
85 4.7 4.7
86 4.7 4.8
87 4.7 4.8
88 4.7 4.8
89 4.7 4.8
90 0 0
91 0 0
92 4.7 4.8
93 0 0
94 4.7 4.8
95 4.2 4.2
96 4.2 4.2
97 4.2 4.2
98 4.2 4.2
99 4.2 4.2
100 4.2 4.2
IC7002
105.1
205.0
300
CN1
100
200
300
4 2.3 2.2
5 2.3 2.2
6 2.3 2.2
7 2.5 0
8 2.5 0
9 2.5 0
CN2001
100
200
300
400
5 2.2 2.4
6 2.4 2.4
CN2002
100
200
CN3001
1 2.4 2.4
2 18.6 18.5
3 5.0 5.0
400
5 7.1 7.2
600
700
8 11.8 11.9
9 2.6 2.6
10 2.5 2.5
11 1.3 1.3
12 2.5 2.6
Page 46

4-25 4-26
4.15 SYSTEM CONTROL BLOCK DIAGRAM
+5V
(
14.32MHz
)
CTL +
CTL -
MAIN(SYSCON
)
END SENSOR
REC SAFETY
CTL AMP OUT
TO
D.FF
2
CN2001
2
1
LSA
SYN IN
LPF
VIDEO SECTION(ON SCREEN
)
V TO OSD
V FROM OSD
V.PULSE
V.PULSE
VIDEO/AUDIO
VIDEO ENVVIDEO ENV
1
X3001
CLOCK
SYSTEMMAIN
END
SENSOR
(
RESET
)
RESET
SWSAFETYRECS3001
SDA
SCL
5
6
(
SYSTEM CONTROL MICRO PROCESSOR
)
IC3001
LSC
LSA
LSB
TP4001
CTL. P
30
M
LSC
LSD
LSB
ENCODER
ROTAR Y
1
2
CN1
(+)HEADCTL
(-)HEADCTL
CTL
HEADA/C
HEADA/C
I2C DATA A/V
I2C CLK A/V
VIDEO/AUDIO
TO
17
18
23
24
50
49
47
I2C DATA A/V
I2C CLK A/V
D.FF
76
75
74
37
38
X OUT
84
SW_PT_ADJ
XIN
Q3002
25
RESET
60
MODEL_OPTION_1
63
MODEL_OPTION_2
64
MODEL_OPTION_3
D3005
AL5.8V SYS
Q3006,Q3007
I2C DATA
I2C CLK
I2C DATA
I2C CLK/TEST
IC3004
(
SERIAL MEMORY
)
35
27
A.MUTE(H
)
N.REC ST(H
)
N.REC(H
)
N.REC(H
)
N.REC ST(H
)
A.MUTE(H
)
A.MUTE(H
)
TO
VIDEO/AUDIO
WF5
WF6
TO FMA/DEMOD
TO
TERMINAL
CAP.M FG
CAP.M F/R
CAP.M VCTL
LM F/R/S
DRUM PG/FG
DRUM VCTL
68
62
33
61
65
34
22
78
4
31
32
15
H.REC_ST(H
)
H.REC_ST(H)
28
TO TUNER
I2C DATA
I2C CLK
V_TO_OSD
VIDEO_OSD_OUT
WF3
WF4
83
93
92
LSD
94
91
JS3001
4
3
5
2
5
6
1
4
9
10
11
12
12
21
12
10
4
11
9
1
DRUM MOTOR
58
57
3in1MDA
CAP MOTOR
55
LOADING MOTOR
M
M
D PG+
D PG-
L1
L2
CAP.M FG
CAP.M F/R
CAP.M VCTL
LM F/R/S
DRUM PG/FG
DRUM CTL
CN3001
WF1
WF2
PHOTO
SENSOR
PHOTO
SENSOR
PC3001
PC3002
1
2
SP FG
TU FG
OPEN
VR4028
SWITCHING POINT ADJ.
MODELS
MODEL MODEL MODEL
OPTION 1 OPTION 2 OPTION 3
HR-J691U, J691U(C), J694U
000
HR-J698U(C)(with A/B code)
100
HR-J695U(C)(with child lock)
010
for future model 1 1 0
for future model 0 0 1
for future model 1 0 1
for future model 0 1 1
for future model 1 1 1
0 : Low level (Connected to GND)
1 : Hi level (Connected to Vcc)
Note : For the waveforms in this block diagram, refer to page 4-22.
Page 47

4-27 4-28
4.16 VIDEO BLOCK DIAGRAM
SIGNAL PROCESSOR
)
TO
TP111
D.FF
VIDEO
D.FF
ENV
SYSCON
X2
CTL
DET
SW2
SW1
Head
Head
HPF
ENV
D.FF
40
VCO/OSC
X-tal
42
Det.CR
2fsc
Discri
PB/REC
AFC
REC
VCO2FL
1/2
.Conv
DOWN
38
(
IC1
NOT
PB.FM
TP106
VIDEO & AUDIO
44
LPF
34
R
P
VCO
LOCK CTLfH
2fsc
APC
REC
APC
PB
SW.
1/2
Phase
Det.ID
Color
ACC
Pulse
APC
SW
Det
Killer
P
1
C
R
BDL
VCA
CLPF
PR
Det1
LEVEL
Det2
LEVEL
Delay
SP CH2
8
7
U.DRUM
NOT
USED
CN1
SP CH1
5
6
3
4
1
2
5
6
3
4
1
2
HEAD
VIDEO
T
Comp
DET
ME
DET
SECAM
DET
SP2
+
-
SP1
-
CH1
CH2
SP2
SP
EP
(
LP
Gen.
P
4Phase
R
HPF
2M LPF
YCA
MUTE
REC
P
R
629
L-SECAM
AGC
DET
FM
P
TRAP
L-SECAM
)
+
+
EP2
-
-
CH1
CH2
SP1
EP2
EP1
+
EP1
REC
MOD
Adjfo/Dev
FM
Filter
S-DET
W.C/D. C
CarrierOffset
Main Emph
ACC
fH
CTL
R
P
TRAP
TRAP
HPF
LPF
.SEP
COMP
DL
SQPB
SQPB
SQPB
EQ
G
DLIM
Det
DO
Conv1
P
R
Main
CLPF
Conv2
P
R
Main
N.L.
Emph
N.L.
De.Emph
P
R
BPF
R
P
Det
ALC
LPF
Main
LPF
ET
Sub
PR
De.Emph
Y LPF
PR
ETET
FBC/ALC
SQPB
EQ
SQPB
D.E.
N.C.
YNR
SQPB
Clamp
P
DO
/REC
DO
R
PR
DeMOD
EQ
87
TERFIL
13612 14
Gen.
03
BUF
30
C.K
2729
NP
B.D
B.E
AMP6dB
AMP6dB
C.SQUELCH
SQUELCH
26
BUF
Q901
SYSCON
TO
TO
TUNER
INT
EXT
C.K
SYNC
CLEAR
Sync.Sep.
WHITE
LIMITER
25
21
Clamp
CTL
ideo
P
R
)
ATT
-10dB
)
ATT
-10dB
)
ATT
-10dB
V
AGC
APT
Y
BDL
LPF
BDL
ATT
-10dB
)
ADAT
CLK
Interface
I2C
22
20
18
16
46
45
(
(
(
(
1
2
10
FIL
11
REC
AGC
Clamp
PB
LPF
BDL
2
ADD
PILOT
USED
NOT
USED
NOT
USED
TER
MAIN(VIDEO, TERMINAL
)
V.PULSE
VIDEO
REAR OUT
J2
NOT
USED
USED
NOT
USED
NOT
85
86
88
89
90
WF6
WF5
92
91
100
81
84
Y
Y
Y
WF7
WF8
WF4
WF3
WF1
WF2
Y
Y
Y
Y
Y
C
C
C
C
USED
NOT
USED
NOT
C
V TO OSD
I2C DATA A/V
I2C CLK A/V
V FROM OSD
RF VIDEO
TU VIDEO
ANK
SECAM SECAM
REC
LEVEL
CTL
FRONT IN
VIDEO
J7101
2
1
USED
NOT
Q23
LP/EP_CH2
LP/EP_CH1
8
7
5
6
3
4
1
2
WF9
Note : For the waveforms in this block diagram, refer to page 4-22.
Page 48

4-29 4-30
4.17 AUDIO BLOCK DIAGRAM
(VP)-V15D1
E. & O.E No.82904 HR-J691U/J691U(C)/J694U/J695U(C)/J698U(C)
WF3
WF5
WF6
WF2
WF1
WF7
WF4
R
L
R
L
R
L
6
5
CN2001
CN2002
Q2051
Q2052-Q2055
T2051
EQ
P
R
PRE AMP
REC ON
REC
VCA
DET
FILTER
FILTER
TRANS
OSC
POWER
SW
SYSCON
30
+
-
2
1
A.MUTE
SP ON
A.MUTE(H
)
N.REC(H
)
TO
A. ERASE
REC/PB
F.ERASE
6
7
A/C HEAD
21
N.REC ST(H
)
53 6364 62 61 78 42 40
EP(LP)ON
95
96
97
98
99
FULL ERASEHEAD
CN1
(
VIDEO/N.AUDIO SIGNAL PROCESSOR
)
IC1
J2
REAR OUT
+
4
1
NOT
USED
NOT
USED
2
1
IC2201
61
NORMAL OUT
62
NORMAL IN
6
53
LINE OUT(R
)
57
LINE OUT(L
)
FMA CH1
AUDIO HEAD
U.DRUM
CN1
9
10
11
12
9
10
11
12
FMA CH2
J7101
8
6
J7101
7
5
3
4
9
EXT1 IN(R
)
14
EXT1 IN(L
)
22
CH1
21
COM
24
CH2
TUNER
COMP
RF AUDIO
TO
48
SIF IN
59
RFC_OUT
36
MUTE
fsc_IN
CTL
Q2201- Q2204
MUTE
CONTROL
I2C CLK
I2C DATA
43
45
DATA
42
CLK
30
PB FM IN
H.REC ST(H
)
TP2253
A.PB.FM
AUDIO(R
)
AUDIO(L
)
MAIN(VIDEO/AUDIO,FMA/DEMOD, TERMINAL
)
FRONT
AUDIO IN(R
)
FRONT
AUDIO IN(L
)
SIF
PRE OUT
29
7
8
9
3
4
4
3
X2
Note : For the waveforms in this block diagram, refer to page 4-22.
Page 49

SECTION 5
PARTS LIST
SAFETY PRECAUTION
Parts identified by the ! symbol are critical for safety. Replace only with specified part numbers.
5.1 PACKING AND ACCESSOR Y ASSEMBLY <M1>
The instruction manual to be provided with this product will differ according to the destination.
307
ADHESIVE
TAPE
312
306A
[HR-J691U,J694U]
302
306
317
FINAL ASSY <M2>
308
316[HR-J691U(C),J695U(C),J698U(C)]
310
319[HR-J691U(C),J695U(C),J698U(C)]
303
302
# REF No. PART No. PART NAME, DESCRIPTION # REF No. PART No. PAR T NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
******************************
P ACKING AND ACCESSORY ASSEMBLY <M1>
301 LP31089-001A PACKING CASE,J691U/J691U(C)
LP31089-004A PACKING CASE,J694U
LP31089-025A PACKING CASE,J695U(C)
LP31089-028B PACKING CASE,J698U(C)
302 LP31091-001B CUSHION ASSY
303 PQM30021-95 POLY BAG
306 LP20878-001A
LP20878-020A REMOTE CONTROLLER,J698U(C)
306A LP40610-001A COVER(BATTERY)
REMOTE CONTROLLER,J691U/J691U(C)/J694U/J695U(C)
301
SPEC OF BARCODE
307
308 QPC02202230P POLY BAG
! 310 LPT0624-001B INST.BOOK(EN),J691U/J691U(C)
! LPT0624-002A INST.BOOK(FR),J691U(C)
! LPT0625-001A INST.BOOK(EN),J694U
! LPT0634-001A INST.BOOK(EN),J695U(C)
! LPT0634-002A INST.BOOK(FR),J695U(C)
! LPT0635-001A INST.BOOK(EN),J698U(C)
! LPT0635-002A INST.BOOK(FR),J698U(C)
312 PEAC0294-04 RF CABLE
316 BT-52004-2
317 BT-51028-1 REGIST.CARD,J691U/J694U
319 BT-20071B
-
BATTERY,X2("AA"TYPE)
WARRANTY CARD,J691U(C)/J695U(C)/J698U(C)
SER.NET CARD,J691U(C)/J695U(C)/J698U(C)
5-1
Page 50

5.2 FINAL ASSEMBLY <M2>
BEWARE OF BOGUS PARTS
Parts that do not meet specifications may
cause trouble in regard to safety and performance. We recommend that genuine JVC
parts be used.
528
527
515
505
NOTE) HANG THE FOOK OF THE
TOP COVER IN HOLD OF CHASSIS.
FFC WIRE remove from the A/C HEAD
BASE and put MECHA UNIT on CHASSIS.
503
MAIN BOARD
ASSY<03>
Hang the fook of the T.Board in
hole of CHASSIS.
D
511
D
501
501A
516
501B
502
529
REAR SIDE
a
TB1
(Incl<03>)
510
515
MECHANISM
ASSY<M4>
b
"A"
a
510
510
b
516
The SHIELD CASE of the MAIN PWB is bent
from part A and MECHA CHASSIS is put.
CD1(Incl<03>)
a
z
SD1
(Incl<03>)
a
Must confirm soldering condition as no soldering and dry
soldering at portion of Power cord lead on Main pwb before
attach Main pcb to Bottom chassis.
c
Accord the position of V gap on R. Encoder and PWB silk " ".
Accord the position of Boss on R. Encoder and PWB silk " ".
c
b
z
For the prevention of the DRUM FPC damage.
When you attach the MECHA UNIT on B. CHASSIS.
Attach the MECHA UNIT after the positioning boss "z" of the
B. CHASSIS is matched to the positioning hole of the MECHA UNIT.
501E
501C
Hang the fook of CHASSIS on the PWB.
FW3001
501D
From CAPSTAN MDA
right side
Wire is bent to rear side
Be careful to insert that will not be slanting,and
will not be pushing of PRESS LEVER.
NEUTRAL
(WHITE LINE)
NEUTRAL
(WHITE LINE)
Right side
PRESS LEVER
NOTE
1. Insert direction of FCC WIRE as follows.
Right side Back side
electrode side
2. FFC WIRE and DRUM FPC WIRE should be insert as follows.
OK
90
CN
The power code not touch the power supply
PRIMARY side and the mechanics chassis.
Hang the fook of CHASSIS on the PWB.
supporting side
NG
CN CN
5-2
Page 51

# REF No. PART No. PART NAME, DESCRIPTION # REF No. P ART No. PART NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
******************************
FINAL ASSEMBLY <M2>
! 501 LP10415-001B FRONT PANEL ASSY,J691U/J691U(C)
LP10415-002B FRONT PANEL ASSY,J694U
LP10415-009B FRONT PANEL ASSY,J695U(C)
LP10415-010B FRONT PANEL ASSY,J698U(C)
501A LP21080-001A
LP21080-005A CASSETTE DOOR,J695U(C)
501B PQ46448 TORSION SPRING
501C LP21081-001A DISPLAY WINDOW
501D LP31056-001A
LP31056-007A COVER(R),J695U(C)
501E LP31057-001A COVER(L),J691U/J691U(C)
LP31057-009A COVER(L),J694U
LP31057-010A COVER(L),J695U(C)
LP31057-002A COVER(L),J698U(C)
! 502 LP10418-001B
! LP10418-002B TOP COVER,J695U(C)
503 QYTDSF3010M
QYTDSF3010R SCREW,X3,TOP COVER,J695U(C)
505 PDV2531A DRUM ASSY
510 QYSPSPD3008Z SCREW,X3,DRUM
! 511 LP10417-001B
! LP10417-004B BOTTOM CHASSIS,J695U(C)
515 QYTDSF4012Z SCREW,X2,MECHA
516 QYSPSF3010Z SCREW,X2,MECHA
527 LP21101-001A DRUM SHIELD
528 QYSPST2606Z SCREW,DRUM SHIELD
529 LP40960-001A SHEET(SHIELD)
CASSETTE DOOR,J691U/J691U(C)/J694U/J698U(C)
COVER(R),J691U/J691U(C)/J694U/J698U(C)
TOP COVER,J691U/J691U(C)/J694U/J698U(C)
SCREW,X3,TOP COVER,J691U/J691U(C)/J694U/J698U(C)
BOTTOM CHASSIS,J691U/J691U(C)/J694U/J698U(C)
5-3
Page 52

5.3 MECHANISM ASSEMBLY <M4>
112
AA
124
127
128
138
126
AA
110
AA
118
77
76
AA
AA
122
130
121
74
BB
90
72
71
73
75
37
AA
89
38
AA
36
107
88
BB
90
89
21
4
105
131
79
137
138
151
123
125
126
119
120
82
111
115
80
83
81
105
107
AA
117
26
AA
52
58
3
53
57
55
113
112
116
114
A/C HEAD
BOARD ASSY <12>
WR2
58
42
50
44
49
78
134
AA
69
70
Classification drawing
Part No.
AA
102
AA
Symbol in
Grease KYODO-SH-JB AA
Oil COSMO-HV56 BB
86
AA
62
59
63 *1
AA
91
1
39
68
AA
84
61
60
66
47
BB
BB
AA
95
96
93
94
BB
15
22
AA
18
19
20
LOADING MOTOR
BOARD ASSY <55>
16
AA
18B
18A
65
23B
23A
23
24
AA
AA
AA
64
67
WR3
WR1
51
85
87
AA
AA
46
NOTE:The section marked in AA and BB
indicate lubrication and greasing areas.
5-4
Page 53

# REF No. PART No. PART NAME, DESCRIPTION # REF No. P ART No. PART NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
! 85 QAR0204-002 CAPSTAN MOTOR
******************************
1 LP21039-001K MAIN DECK ASSY
3 LP40097-002D GUIDE POLE CAP
4 QAH0082-001 FULL ERASE HEAD
15 LP30958-001A LOAD.GEAR BASE
16 QYTPST2620Z SCREW,X2
18 LP40798-001A LOAD.GEAR(SUPPLY) ASSY
18A LP21040-001A LOAD.GEAR(SUPPLY)
18B LP40799-001A LOAD.ARM(SUPPLY) ASSY
19 LP40837-001A TORSION SPRING(SUPPLY)
20 LP40903-001A FIXING PLATE
21 LP40806-001D POLE BASE ASSY(SUPPLY)
22 LP30959-002A LOAD GEAR
23 LP40802-001B LOAD.GEAR(TAKE UP)ASSY
23A LP21041-001B LOAD.GEAR(TAKE UP)
23B LP40803-001A LOAD.ARM(TAKE UP) ASSY
24 LP40838-001A TORSION SPRING(TAKE UP)
26 LP40808-001E POLE BASE ASSY(TAKE UP)
36 LP21055-001E TU LEVER
37 LP40943-001A TENSION SPRING
38 LP40859-001C T AKE UP HEAD
39 LP30961-001B LID GUIDE
42 LP40810-001A PINCH ROLLER ARM ASSY
44 LP40840-001B TORSION SPRING
46 LP30963-001A PRESS LEVER
47 PQM30017-24 SLIT WASHER
49 LP40813-001B GUIDE ARM ASSY
50 LP40841-001A TORSION SPRING
51 LP30002-090A SPACER
52 QAH0081-001 AC HEAD
53 LP30965-001A HEAD BASE
55 LP40842-001A COMPRESSION SPRING
57 QYTSST2010Z SCREW,X3
58 QYTDST2606Z SCREW,X2
59 QAR0023-001 LOADING MOTOR
60 QYTPSP3003Z SCREW,X2
61 LP21056-002D MOTOR BRACKET
62 QYTPST2620Z SCREW
63 LP40814-001A WORM BEARING
64 LP21044-001C CONTROL CAM
65 PQM30017-24 SLIT WASHER
66 LP40815-001A WORM GEAR
67 LP40816-001B HELICAL GEAR
68 LP40817-001A CONNECT GEAR
69 LP10400-001G CONTROL PLATE
70 LP40843-001A TORSION SPRING
71 LP40818-001B TENSION ARM ASSY
72 LP40844-001C TENSION SPRING
73 LP21045-001B TENSION ARM BASE
74 LP40821-001A TENSION BAND ASSY
75 LP30967-001B BAND HOLDER-1
76 LP30968-001C BAND HOLDER-2
77 LP40822-002B ADJUST PIN
78 LP31000-005E TENSION ARM LEVER
79 LP21046-001C MAIN BRAKE(TAKE UP)
80 LP40824-001A BAND BRAKE ASSY
81 LP30969-002A BRAKE LEVER
82 LP30003-033B TENSION SPRING
83 LP30003-035B TENSION SPRING
84 LP40825-001B CAPSTAN BRAKE ASSY
MECHANISM ASSEMBLY <M4>
86 QYTDSF2606M SCREW ,X3
87 LP30005-010A BELT ,CAPST AN MOT OR
88 LP30970-001A IDLER ARM
89 LP40828-002A IDLER GEAR 1,X2
90 LP40829-001B IDLER GEAR 2,X2
91 LP31014-001A WIRE HOLDER
93 LP40934-001B CLUTCH UNIT
94 PQM30017-47 SLIT WASHER
95 LP30973-001A DIRECT GEAR
96 LP40939-001A COMPRESS.SPRING
102 LP30974-001B CHANGE LEVER
105 LP21049-001A REEL DISK,X2
107 LP30017-004A SPACER,X2
110 LP10401-001E SIDE FRAME(L)
111 LP10402-001F SIDE FRAME(R)
112 QYTDST2606Z SCREW,X2
113 LP40917-001C TORSION SPRING
114 LP30976-001D SIDE PLATE
115 LP30977-002B LIMIT PLA TE
116 LP40846-001C LIMIT SPRING
117 LP31100-001B DRIVE LEVER
118 LP30978-001B DRIVE ARM(L)
119 LP30979-001E DRIVE ARM(R)
120 LP40847-001B TORSION SPRING
121 LP30980-001A CONNECT PLA TE
122 LP10403-001C SIDE HOLDER(L)
123 LP10404-001D SIDE HOLDER(R)
124 LP30983-001A LOCK LEVER(L)
125 LP30984-001A LOCK LEVER(R)
126 LP40924-001C TENSION SPRING,X2
127 LP40856-001B EARTH SPRING(1)
128 LP40857-001B EARTH SPRING(2)
130 LP30981-001E CASSETTE HOLDER ASSY
131 LP31135-001A C.H STOPPER
134 LP21051-002B REC SAFETY LEVER
137 LP21052-001F TOP FRAME
138 LP30002-0A7A SPACER,X2
151 LP30985-001F DOOR OPENER
WR1 WJT0059-001A E-CARD WIRE,DRUM
WR2 WJT0067-001B E-CARD WIRE,AC HEAD CN2001
WR3 WJS0022-001A E-FL/RB WIRE,ROADING MOTOR
*1
63.WORM BEARING
59.LOADING MOTOR
6.8 0.2 mm
5-5
Page 54

5.4 ELECTRICAL PARTS LIST
# REF No. PART No. P ART NAME, DESCRIPTION # REF No. PART No. P ART NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
******************************
MAIN BOARD ASSEMBLY <03>
PW1 LPA10159-01D1
LPA10159-02C1 MAIN BOARD ASSY,J695U(C)
LPA10159-03C1 MAIN BOARD ASSY,J698U(C)
IC1 JCP8041-NVA IC
! IC2201 AN3663FBP IC
IC3001 MN101D06GJC IC
or MN101DF06KAFJC IC
IC7002 GP1U291Q IR DETECT UNIT
or PIC-37143LJ IR DETECT UNIT
or PNA4652M00YC IR DETECT UNIT
Q22 2SC4081/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
Q38 2SC4081/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
Q901 2SA1576A/QRS/-X TRANSISTOR
or 2PA1576/R/-X TRANSISTOR
or 2SA1576A/QR/-X TRANSISTOR
Q2001 2SC4081/QRS/-X TRANSISTOR
or 2SD1819A/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
Q2002 2SC4081/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
or 2SD1819A/QRS/-X TRANSISTOR
Q2003 DTA144WU DIGI TRANSISTOR
or PDTA144WU DIGI TRANSIST OR
or RN2309 TRANSISTOR
or UN511E DIGI TRANSISTOR
Q2051 2SC4081/QRS/-X TRANSISTOR
or 2SD1819A/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
Q2052 2SA1576A/QR/-X TRANSISTOR
or 2PA1576/R/-X TRANSISTOR
or 2SB1218A/QR/-X TRANSISTOR
Q2053 DTC144WU DIGI TRANSISTOR
or PDTC144WU DIGI TRANSISTOR
or RN1309 DIGI TRANSISTOR
or UN521E DIGI TRANSISTOR
Q2054 2SA1576A/QR/-X TRANSISTOR
or 2SB1218A/QR/-X TRANSISTOR
or 2PA1576/R/-X TRANSISTOR
Q2055 DTC144WU DIGI TRANSISTOR
or PDTC144WU DIGI TRANSISTOR
or RN1309 DIGI TRANSISTOR
or UN521E DIGI TRANSISTOR
Q2201 DTA144WU DIGI TRANSISTOR
or PDTA144WU DIGI TRANSIST OR
or RN2309 TRANSISTOR
or UN511E DIGI TRANSISTOR
Q2202 DTC144WU DIGI TRANSISTOR
or PDTC144WU DIGI TRANSISTOR
or RN1309 DIGI TRANSISTOR
or UN521E DIGI TRANSISTOR
Q2203 2SC4081/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
or 2SD1819A/QRS/-X TRANSISTOR
Q2204 2SC4081/QRS/-X TRANSISTOR
or 2SD1819A/QRS/-X TRANSISTOR
MAIN BOARD ASSY,J691U/J691U(C)/J694U
! Q5321 2SD1858/QR/-T TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
Q3002 PTZ-NV16A PHOTO TRANSISTOR
Q3006 2SC4081/QRS/-X TRANSISTOR
Q3007 2SC4081/QRS/-X TRANSISTOR
Q4001 UN5211 DIGI TRANSISTOR
or RN1302 DIGI TRANSISTOR
or DTC114EU DIGI TRANSISTOR
or PDTC114EU DIGI TRANSISTOR
Q4002 2SD1819A/QRS/-X TRANSISTOR
or 2PC4081/R/-X TRANSISTOR
or 2SC4081/QRS/-X TRANSISTOR
Q5101 2SK2043-CB14 FE TRANSISTOR
or 2SK2043 FE TRANSISTOR
Q5102 2SD2144S/UV/-T TRANSISTOR
Q5301 2SC1740S/RS/-T TRANSISTOR
or 2SC3199/YG/-T TRANSISTOR
Q5304 2SD2144S/UV/-T TRANSISTOR
Q5305 DTA114EU DIGI TRANSISTOR
or PDTA114EU DIGI TRANSISTOR
or RN2302 TRANSISTOR
or UN5111 DIGI TRANSISTOR
Q5306 DTC114EU DIGI TRANSISTOR
or PDTC114EU DIGI TRANSISTOR
or RN1302 DIGI TRANSISTOR
or UN5211 DIGI TRANSISTOR
Q6030 2SB1218A/QR/-X TRANSISTOR
or 2PA1576/R/-X TRANSISTOR
or 2SA1576A/QR/-X TRANSISTOR
Q7001 DTA143TU DIGI TRANSISTOR
or UN5116 TRANSISTOR
Q7002 DTA143TU DIGI TRANSISTOR
or UN5116 TRANSISTOR
Q7003 DTA143TU DIGI TRANSISTOR
or UN5116 TRANSISTOR
Q7004 DTA143TU DIGI TRANSISTOR
or UN5116 TRANSISTOR
Q7005 DTA143TU DIGI TRANSISTOR
or UN5116 TRANSISTOR
Q7006 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
Q7007 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
Q7008 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
Q7009 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
Q7010 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
Q7011 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
Q7012 DTC143TU DIGI TRANSISTOR
or UN5216 TRANSISTOR
D1 QUY153-050Y IM BUS WIRE
D2251 1SS133 DIODE
or 1SS270A DIODE
D3001 LNB2301L01VI LE DIODE
D3002 1SS133 DIODE
or 1SS270A DIODE
D3005 11ES2 DIODE
or 1A3G DIODE
5-6
Page 55

# REF No. PART No. PART NAME, DESCRIPTION # REF No. PART No. PAR T NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
D3016 MTZJ3.9B ZENER DIODE
or RD3.9ES/B2/-T2 ZENER DIODE
D5001 S1WB/A/60-4102 BRIDGE DIODE
or S1WB/A/60-X BRIDGE DIODE
or S1WB(A)60F4072X BRIDGE DIODE
D5101 AU01 DIODE
or ERA18-04-T2 FR DIODE
or 1SR153-400-T2 FR DIODE
or 10ELS4 FR DIODE
D5102 11ES2 DIODE
or ERA15-02-T2 DIODE
or 1A3G DIODE
D5103 1SS133 DIODE
or 1SS270A DIODE
D5105 1SS133 DIODE
or 1SS270A DIODE
D5203 AU01Z FR DIODE
or 10ELS2 FR DIODE
D5204 AU01Z FR DIODE
or 10ELS2 FR DIODE
D5207 AK04 SB DIODE
or 1S4 SB DIODE
or 11EQS04 SB DIODE
or SBO40 SB DIODE
D5210 AU01Z FR DIODE
or ERA18-02-T2 FR DIODE
or 1SR153-400-T2 FR DIODE
or PG104RS FR DIODE
or 10ELS2 FR DIODE
D5301 MTZJ15C ZENER DIODE
or RD15ES/B3/-T2 ZENER DIODE
D5302 MTZJ12A ZENER DIODE
or RD12ES/B1/-T2 ZENER DIODE
D5303 MTZJ5.6A ZENER DIODE
or RD5.6ES/B1/-T2 ZENER DIODE
D5305 MTZJ5.6C ZENER DIODE
or RD5.6ES/B3/-T2 ZENER DIODE
D6002 HZ30-2L-T2 ZENER DIODE
or HZ30-2LTD Z DIODE (M)
R1 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R2 NRSA02J-152X MG RESISTOR 1.5kØ,1/10W
R3 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R6 NRSA02J-273X MG RESISTOR 27kØ,1/10W
R7 NRSA02J-821X MG RESISTOR 820Ø,1/10W
R8 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R9 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R49 NRSA02J-471X MG RESISTOR 470Ø,1/10W
R77 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R78 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R90 NRSA02J-471X MG RESISTOR 470Ø,1/10W
R93 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R104 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R118 NRSA02J-222X MG RESISTOR 2.2kØ,1/10W
R201 NRSA02J-332X MG RESISTOR 3.3kØ,1/10W
R202 NRSA02J-222X MG RESISTOR 2.2kØ,1/10W
R901 NRSA02J-750X MG RESISTOR 75Ø,1/10W
R904 QRE121J-331Y RESISTOR 330Ø,1/2W
R905 NRSA02J-101X MG RESISTOR 100Ø,1/10W
R912 NRSA02J-750X MG RESISTOR 75Ø,1/10W
R2003 NRSA02J-101X MG RESISTOR 100Ø,1/10W
R2007 NRSA02J-123X MG RESISTOR 12kØ,1/10W
R2010 NRSA02J-123X MG RESISTOR 12kØ,1/10W
R2013 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R2014 NRSA02J-224X MG RESISTOR 220kØ,1/10W
R2015 NRSA02J-221X MG RESISTOR 220Ø,1/10W
R2016 NRSA02J-473X MG RESISTOR 47kØ,1/10W
R2017 NRSA02J-153X MG RESISTOR 15kØ,1/10W
R2018 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2019 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2053 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2054 NRSA02J-123X MG RESISTOR 12kØ,1/10W
R2055 NRSA02J-3R3X MG RESISTOR 3.3Ø,1/10W
R2056 QRE141J-820Y RESISTOR 82Ø,1/4W
R2057 NRSA02J-473X MG RESISTOR 47kØ,1/10W
R2058 NRSA02J-183X MG RESISTOR 18kØ,1/10W
R2059 NRSA02J-473X MG RESISTOR 47kØ,1/10W
R2060 NRSA02J-183X MG RESISTOR 18kØ,1/10W
R2201 NRSA02J-473X MG RESISTOR 47kØ,1/10W
R2202 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R2205 NRSA02J-473X MG RESISTOR 47kØ,1/10W
R2206 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R2209 NRSA02J-101X MG RESISTOR 100Ø,1/10W
R2210 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2211 NRSA02J-332X MG RESISTOR 3.3kØ,1/10W
R2212 NRSA02J-332X MG RESISTOR 3.3kØ,1/10W
R2213 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2214 NRSA02J-101X MG RESISTOR 100Ø,1/10W
R2215 QRE141J-221Y RESISTOR 220Ø,1/4W
R2216 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R2217 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2218 NRSA02J-392X MG RESISTOR 3.9kØ,1/10W
R2219 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R2220 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R2251 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R2252 NRSA02J-332X MG RESISTOR 3.3kØ,1/10W
R2253 QRE141J-101Y RESISTOR 100Ø,1/4W
R2255 NRSA02J-273X MG RESISTOR 27kØ,1/10W
R2257 NRSA02J-684X MG RESISTOR 680kØ,1/10W
R3017 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R3018 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R3031 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R3032 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R3091 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R3092 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R3093 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R3094 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R3133 QUY153-050Y IM BUS WIRE
R3134 QUY153-050Y IM BUS WIRE,J691U/J691U(C)/J694U
R3135 QUY153-050Y IM BUS WIRE
R3136 QRE141J-103Y RESISTOR 10kØ,1/4W
R3137 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3138 NRSA02J-103X MG RESISTOR,J698U(C) 10kØ,1/10W
R3139 QRE141J-103Y RESISTOR,J695U(C) 10kØ,1/4W
R3205 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3206 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3207 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3208 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3209 QRE141J-181Y RESISTOR 180Ø,1/4W
R3211 NRSA02J-183X MG RESISTOR 18kØ,1/10W
R3212 NRSA02J-121X MG RESISTOR 120Ø,1/10W
R3213 NRSA02J-183X MG RESISTOR 18kØ,1/10W
R3214 NRSA02J-121X MG RESISTOR 120Ø,1/10W
5-7
Page 56

# REF No. PART No. P ART NAME, DESCRIPTION # REF No. PART No. P ART NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
R3215 NRSA02J-183X MG RESISTOR 18kØ,1/10W
R3216 NRSA02J-474X MG RESISTOR 470kØ,1/10W
R3217 NRSA02J-334X MG RESISTOR 330kØ,1/10W
R3219 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3220 NRSA02J-562X MG RESISTOR 5.6kØ,1/10W
R3222 NRSA02J-471X MG RESISTOR 470Ø,1/10W
R3223 NRSA02J-105X MG RESISTOR 1MØ,1/10W
R3224 NRSA02J-101X MG RESISTOR 100Ø,1/10W
R3226 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3227 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3237 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R3238 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R3242 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R3243 NRSA02J-681X MG RESISTOR 680Ø,1/10W
R3244 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R3245 NRSA02J-682X MG RESISTOR 6.8kØ,1/10W
R3252 NRSA02J-153X MG RESISTOR 15kØ,1/10W
R3253 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R4001 NRSA02J-222X MG RESISTOR 2.2kØ,1/10W
R4002 NRSA02J-562X MG RESISTOR 5.6kØ,1/10W
R4003 NRSA02J-0R0X MG RESISTOR 0Ø,1/10W
R4006 NRSA02J-472X MG RESISTOR 4.7kØ,1/10W
R4010 NRSA02J-471X MG RESISTOR 470Ø,1/10W
R4011 NRSA02J-471X MG RESISTOR 470Ø,1/10W
R4012 NRSA02J-153X MG RESISTOR 15kØ,1/10W
R4018 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R4019 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R4026 NRSA02J-0R0X MG RESISTOR 0Ø,1/10W
R4027 NRSA02J-0R0X MG RESISTOR 0Ø,1/10W
! R5001 QRZ9046-475Z RESISTOR 4.7MØ,1/2W
R5101 NRSA02J-224X MG RESISTOR 220kØ,1/10W
R5102 NRSA02J-224X MG RESISTOR 220kØ,1/10W
R5103 NRSA02J-683X MG RESISTOR 68kØ,1/10W
R5104 QRG02GJ-683 OMF RESISTOR 68kØ,2W
R5106 QRT01DJ-R39X MF RESISTOR 0.39Ø,1W
R5107 QRE123J-331X RESISTOR 330Ø,1/2W
R5108 NRSA02J-122X MG RESISTOR 1.2kØ,1/10W
R5109 QRE141J-681Y RESISTOR 680Ø,1/4W
R5110 NRSA02J-224X MG RESISTOR 220kØ,1/10W
R5112 NRSA02J-221X MG RESISTOR 220Ø,1/10W
R5302 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R5303 NRSA02J-122X MG RESISTOR 1.2kØ,1/10W
R5304 NRSA02J-471X MG RESISTOR 470Ø,1/10W
R5306 NRSA02J-181X MG RESISTOR 180Ø,1/10W
R5310 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R5312 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R5313 NRSA02J-821X MG RESISTOR 820Ø,1/10W
R6020 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R6021 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R6030 NRSA02J-332X MG RESISTOR 3.3kØ,1/10W
R6031 NRSA02J-0R0X MG RESISTOR 0Ø,1/10W
R6050 QUY153-050Y IM BUS WIRE
R6054 NRSA02J-102X MG RESISTOR 1kØ,1/10W
R6502 NRSA02J-332X MG RESISTOR 3.3kØ,1/10W
R6503 NRSA02J-153X MG RESISTOR 15kØ,1/10W
R6504 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R7001 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7002 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7003 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7004 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7005 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7006 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7007 NRSA02J-331X MG RESISTOR 330Ø,1/10W
R7015 QUY153-050Y IM BUS WIRE
R7020 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R7022 NRSA02J-122X MG RESISTOR 1.2kØ,1/10W
R7023 NRSA02J-182X MG RESISTOR 1.8kØ,1/10W
R7024 NRSA02J-222X MG RESISTOR 2.2kØ,1/10W
R7030 NRSA02J-103X MG RESISTOR 10kØ,1/10W
R7031 NRSA02J-122X MG RESISTOR 1.2kØ,1/10W
R7032 NRSA02J-182X MG RESISTOR 1.8kØ,1/10W
R7033 NRSA02J-222X MG RESISTOR 2.2kØ,1/10W
VR4028 QVP0039-103Z TRIM RESISTOR,SW PT ADJ.
B1 QUY160-100Y IM BUS WIRE
B3001 QUY153-050Y IM BUS WIRE
C1 NCF21EZ-104X CAPACITOR 0.1µF,25V
C2 NCF21EZ-104X CAPACITOR 0.1µF,25V
C3 NCF21EZ-104X CAPACITOR 0.1µF,25V
C4 NCF21EZ-104X CAPACITOR 0.1µF,25V
C5 QEKC0JM-476 E CAPACITOR 47µF,6.3V
C6 QCBB1HK-103 CAPACITOR 0.01µF,50V
C7 NCB21HK-471X CAPACITOR 470pF,50V
C8 NCB21EK-104X CAPACITOR 0.1µF,25V
C9 NCB21HK-103X CAPACITOR 0.01µF,50V
C10 NDC21HJ-151X CAPACITOR 150pF,50V
C11 NCB21EK-104X CAPACITOR 0.1µF,25V
C12 NDC21HJ-330X CAPACITOR 33pF,50V
C14 NCB21EK-104X CAPACITOR 0.1µF,25V
C15 NCF21CZ-105X CAPACITOR 1µF,16V
C16 NCB21EK-104X CAPACITOR 0.1µF,25V
C17 QEKJ1HM-335 E CAPACITOR 3.3µF,50V
C19 QEKJ1HM-225 E CAPACITOR 2.2µF,50V
C20 QEKJ1HM-105 E CAPACITOR 1µF,50V
C21 NCB21EK-104X CAPACITOR 0.1µF,25V
C22 QEKJ0JM-476 E CAPACITOR 47µF,6.3V
C23 NCB21HK-103X CAPACITOR 0.01µF,50V
C24 QCFB1HZ-104 CAPACITOR 0.1µF,50V
C25 NDC21HJ-5R0X CAPACITOR 5pF,50V
C26 NCB21HK-103X CAPACITOR 0.01µF,50V
C27 NCB21EK-223X CAPACITOR 0.022µF,25V
C28 QEKJ1HM-335 E CAPACITOR 3.3µF,50V
C29 NCB21HK-472X CAPACITOR 0.0047µF,50V
C30 QEKJ1HM-474 E CAPACITOR 0.47µF,50V
C31 QEKJ0JM-476 E CAPACITOR 47µF,6.3V
C32 QDYB1CM-103Y CAPACITOR 0.01µF,16V
C33 QEKJ1HM-225 E CAPACITOR 2.2µF,50V
C34 NCB21EK-104X CAPACITOR 0.1µF,25V
C35 NCB21EK-333X CAPACITOR 0.033µF,25V
C36 QEKJ1EM-475 E CAPACITOR 4.7µF,25V
C37 QERF0JM-476 E CAPACITOR 47µF,6.3V
C38 QERF0JM-476 E CAPACITOR 47µF,6.3V
C39 NCB21HK-103X CAPACITOR 0.01µF,50V
C40 QERF1CM-106 E CAPACITOR 10µF,16V
C51 QERF1HM-105 E CAPACITOR 1µF,50V
C62 NCB21EK-104X CAPACITOR 0.1µF,25V
C120 QEKJ1HM-105 E CAPACITOR 1µF,50V
C144 NCB21HK-102X CAPACITOR 0.001µF,50V
C201 QERF0JM-476 E CAPACITOR 47µF,6.3V
C202 NCB21EK-223X CAPACITOR 0.022µF,25V
C203 QERF1HM-105 E CAPACITOR 1µF,50V
C205 NDC21HJ-101X CAPACITOR 100pF,50V
C207 NCF21CZ-105X CAPACITOR 1µF,16V
5-8
Page 57

# REF No. PART No. PART NAME, DESCRIPTION # REF No. PART No. PAR T NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
C901 QETN0JM-477 E CAPACITOR 470µF,6.3V
C904 NCB21HK-102X CAPACITOR 0.001µF,50V
C2001 QERF1EM-475 E CAPACITOR 4.7µF,25V
C2002 QERF1HM-105 E CAPACITOR 1µF,50V
C2003 QEKJ0JM-476 E CAPACITOR 47µF,6.3V
C2005 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C2006 NCB21HK-123X CAPACITOR 0.012µF,50V
C2007 QEKJ1CM-226 E CAPACITOR 22µF,16V
C2008 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C2009 NCB21HK-102X CAPACITOR 0.001µF,50V
C2010 NCB21HK-152X CAPACITOR 0.0015µF,50V
C2011 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C2012 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C2051 QCBB1HK-331 CAPACITOR 330pF,50V
C2052 QFLC1HJ-823Z F CAPACITOR 0.082µF,50V
C2053 NCB21HK-472X CAPACITOR 0.0047µF,50V
C2054 NCB21EK-223X CAPACITOR 0.022µF,25V
C2055 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2201 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2202 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C2203 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C2204 QEKJ0JM-336 E CAPACITOR 33µF,6.3V
C2205 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2206 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2207 NCB21HK-153X CAPACITOR 0.015µF,50V
C2208 NCB21HK-153X CAPACITOR 0.015µF,50V
C2209 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2210 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2211 QEKJ0JM-336 E CAPACITOR 33µF,6.3V
C2212 QEKJ0JM-476 E CAPACITOR 47µF,6.3V
C2214 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2215 QEKC1EM-106 E CAPACITOR 10µF,25V
C2216 QEKJ1CM-476 E CAPACITOR 47µF,16V
C2218 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2219 QEKJ1CM-226 E CAPACITOR 22µF,16V
C2220 QEKJ1EM-106 E CAPACITOR 10µF,25V
C2221 NCB21EK-223X CAPACITOR 0.022µF,25V
C2222 NCB21HK-103X CAPACITOR 0.01µF,50V
C2251 NCB21HK-103X CAPACITOR 0.01µF,50V
C2252 NCB21HK-103X CAPACITOR 0.01µF,50V
C2253 NCB21HK-103X CAPACITOR 0.01µF,50V
C2254 QEKJ0JM-476 E CAPACITOR 47µF,6.3V
C2255 NCB21HK-103X CAPACITOR 0.01µF,50V
C2256 NCB21HK-103X CAPACITOR 0.01µF,50V
C2257 NCB21HK-103X CAPACITOR 0.01µF,50V
C2259 QEKJ1HM-334 E CAPACITOR 0.33µF,50V
C3004 NDC21HJ-101X CAPACITOR 100pF,50V
C3008 NCB21HK-103X CAPACITOR 0.01µF,50V
C3011 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C3016 NDC21HJ-180X CAPACITOR 18pF,50V
C3017 NDC21HJ-270X CAPACITOR 27pF,50V
C3035 NCB21EK-223X CAPACITOR 0.022µF,25V
C3036 QERF0JM-107 E CAPACITOR 100µF,6.3V
C3041 NDC21HJ-101X CAPACITOR 100pF,50V
C3042 NDC21HJ-101X CAPACITOR 100pF,50V
C3049 NCB21HK-103X CAPACITOR 0.01µF,50V
C3052 NCB21HK-103X CAPACITOR 0.01µF,50V
C3053 QDYB1CM-103Y CAPACITOR 0.01µF,16V
C3056 NCB21EK-104X CAPACITOR 0.1µF,25V
C3071 QEKJ1CM-336 E CAPACITOR 33µF,16V
C4001 NCB21EK-104X CAPACITOR 0.1µF,25V
C4002 QERF1HM-105 E CAPACITOR 1µF,50V
C4004 QERF1AM-336 E CAPACITOR 33µF,10V
C4006 NRSA02J-0R0X MG RESISTOR 0Ø,1/10W
C4007 NCB21HK-103X CAPACITOR 0.01µF,50V
C4009 NCB21HK-102X CAPACITOR 0.001µF,50V
C4010 QERF0JM-476 E CAPACITOR 47µF,6.3V
C4011 NCB21CK-224X CAPACITOR 0.22µF,16V
C4014 NDC21HJ-101X CAPACITOR 100pF,50V
C4019 NCB21HK-103X CAPACITOR 0.01µF,50V
C4031 QEKJ1CM-336 E CAPACITOR 33µF,16V
! C5001 QFZ9072-473 F CAPACITOR 0.047µF,125V
! C5004 QCZ9119-472 CAPACITOR 0.0047µF,125V
C5006 QETM2DM-476 E CAPACITOR 47µF,200V
C5101 QCZ0212-472 CAPACITOR 0.0047µF,1kV
C5102 QCZ0339-101Z CAPACITOR 100pF,1kV
C5104 QEKJ1HM-105 E CAPACITOR 1µF,50V
C5105 QFN31HJ-183 F CAPACITOR 0.018µF,50V
C5107 QFV11HJ-104 F CAPACITOR 0.1µF,50V
C5202 QETN1CM-108 E CAPACITOR 1000µF,16V
C5203 QETN1AM-108 E CAPACITOR 1000µF,10V
C5204 QETJ2AM-475 E CAPACITOR 4.7µF,100V
C5206 QEKJ1CM-476 E CAPACITOR 47µF,16V
C5207 QEKJ1CM-107 E CAPACITOR 100µF,16V
C5301 QEKJ1CM-107 E CAPACITOR 100µF,16V
C5302 QEKJ1HM-225 E CAPACITOR 2.2µF,50V
C5303 QEKJ1CM-107 E CAPACITOR 100µF,16V
C5305 QFVF1HJ-104Z F CAPACITOR 0.1µF,50V
C6501 NCB21EK-104X CAPACITOR 0.1µF,25V
C6502 QEKC1EM-106 E CAPACITOR 10µF,25V
C6503 QEKJ1HM-105 E CAPACITOR 1µF,50V
C6504 QCFB1HZ-104 CAPACITOR 0.1µF,50V
C6506 QEKJ1HM-105 E CAPACITOR 1µF,50V
C6508 NCB21EK-223X CAPACITOR 0.022µF,25V
C6509 NCB21EK-104X CAPACITOR 0.1µF,25V
C6512 NCB21EK-223X CAPACITOR 0.022µF,25V
C6513 QEKJ1HM-225 E CAPACITOR 2.2µF,50V
C6514 NCB21EK-223X CAPACITOR 0.022µF,25V
C6515 QEKC1HM-335 E CAPACITOR 3.3µF,50V
C6516 QEKJ1HM-475 E CAPACITOR 4.7µF,50V
C6517 NCB21CK-224X CAPACITOR 0.22µF,16V
C7011 QEKJ0JM-476 E CAPACITOR 47µF,6.3V
C7013 NCB21HK-103X CAPACITOR 0.01µF,50V
C7014 NCB21HK-103X CAPACITOR 0.01µF,50V
L1 QQL29BJ-100Z COIL 10µH
L3 QQL29BJ-100Z COIL 10µH
L4 QQL29BJ-100Z COIL 10µH
L5 QQL29BJ-100Z COIL 10µH
L11 QQL01BJ-120Z COIL 12µH
L201 QUY153-050Y IM BUS WIRE
L203 QQL231J-4R7Y COIL 4.7µH
L901 QQL29BJ-100Z COIL 10µH
L2001 QUY153-050Y IM BUS WIRE
L2201 QUY153-050Y IM BUS WIRE
L2251 QQL29BJ-100Z COIL 10µH
L4001 QUY153-050Y IM BUS WIRE
L5201 PELN1184 COIL 33µH
L5202 PELN1184 COIL 33µH
L6001 QUY153-050Y IM BUS WIRE
L6003 QUY153-050Y IM BUS WIRE
L6050 QUY153-050Y IM BUS WIRE
L6501 QUY153-050Y IM BUS WIRE
5-9
Page 58

# REF No. PART No. P ART NAME, DESCRIPTION # REF No. PART No. P ART NAME, DESCRIPTION
--------------- ----------------------- ----------------------------------------------------- ---------------- ----------------------- ------------------------------------------------------
X2 QAX0575-001 CRYSTAL RESONATOR
X3001 QAX0526-001Z CRYSTAL RESONATOR
S3001 QSW0602-004 PUSH SWITCH,REC SAFETY
S7002 QSW0456-002Z TACT SWITCH,POWER
S7004 QSW0456-002Z TACT SWITCH,REW/CH-
S7006 QSW0456-002Z TACT SWITCH,FF/CH+
S7008 QSW0456-002Z TACT SWITCH,REC
S7010 QSW0456-002Z TACT SWITCH,PAUSE/CH
S7011 QSW0456-002Z TACT SWITCH,PLAY
S7013 QSW0456-002Z TACT SWITCH,STOP/EJECT
K5101 QQR0678-001Z FERRATE BEADS
K5102 QUY153-050Y IM BUS WIRE
PC3001 RPI-304J IC(PHOTO SENSOR)
PC3002 RPI-304J IC(PHOTO SENSOR)
! PC5101 PC817X IC(PHOTO COUPLER)
T2051 PELN0832 OSC TRANSFORMER
! T5001 QQS0083-001 SW TRANSF
TU6001 QAU0255-001 TUNER
! CD1 QMPD340-165-K POWER CORD
SD1 LP21098-001B SHIELD CASE(PRE)
DI7001 LTG-Y2K12M-01J LE DIODE
JS3001 QSW0954-002 ROTARY ENCODER
J2 QNN0286-002 PIN JACK,A/V OUT
J7101 QNN0381-001
QNN0383-001 PIN JACK,FRONT IN,J695U(C)
! TB1 LP21082-001C TERMINAL BOARD
FC5001 QNG0006-001Z FUSE CLIP,F5001
FC5002 QNG0006-001Z FUSE CLIP,F5001
! LF5002 QQR0532-001 LINE FILTER
! VA5001 QAF0023-431Z VARISTOR
CN1 QGF1201C2-09 FPC CONNECTOR,(1-9)DRUM
CN2001 QGF1201C2-06 FPC CONNECTOR,(1-6)AC/HEAD
CN2002 QGB2532J1-02 CONNECTOR,(1-2)FE HEAD
CN3001 QGB2032M4-12 CONNECTOR,(1-12)CAP+DRUM MOTOR
CP3002 QUY153-050Y IM BUS WIRE
CP4002 QUY153-050Y IM BUS WIRE
! F5001 QMF51N2-1R25J1 FUSE T1.25A,AC250V
PIN JACK,FRONT IN,J691U/J691U(C)/J694U/J698U(C)
******************************
A/C HEAD BOARD ASSEMBLY <12>
PW1 LPA10158-01A1 A/C HEAD BOARD ASSY
******************************
LOADING MOTOR BOARD ASSEMBLY <55>
PW2 LPA10158-01A2 LOADING MOTOR BOARD ASSY
5-10
E. & O.E No.82904 HR-J691U/J691U(C)/J694U/J695U(C)/J698U(C) (VP) -V15D1
 Loading...
Loading...