

Page 1
Manual de funcionamiento
(para el usuario final)
EGCP-2
Conjunto de control de generador y motor
8406-115, Entrada PT 150–300 Vca, 9–32 Vcc
8406-116, Entrada PT 50–150 Vca, 9–32 Vcc
Manual SP26086D
Page 2
ADVERTENCIA
Lea este manual completo y todas las otras publicaciones relacionadas con el
trabajo a ser realizado, antes de instalar, operar o dar servicio a este equipo.
Practique todas las instrucciones y precauciones de seguridad y de planta. El no
seguir las instrucciones puede causar perjuicio personal y/o daño a la propiedad.
El motor, turbina u otro tipo de máquina primaria debe estar equipada con un
dispositivo(s) de disparo de sobrevelocidad (sobre temperatura o sobre presión,
según se aplique), que opere totalmente independiente del dispositivo(s) de control
de la máquina primaria, para proteger contra desbocamiento o daño al motor,
turbina u otro tipo de máquina primaria con posible perjuicio personal o pérdida de
vida, sí el gobernador(es) mecánico/hidráulico(s) o control(es) eléctrico(s), el
actuador(es), control(es) de combustible, el mecanismo(s) impulsor(es), la
conexión(es) o el dispositivo(s) controlado(s) fallaran.
Tierra de protección (PE) debe conectarse al punto de terminación situado en la
parte posterior de la unidad, junto al rótulo que lleva el símbolo (o a 1 de los
otros 3 puntos de terminación similares sin rótulo) para reducir el riesgo de
descarga eléctrica. Esta conexión se utilizará utilizando un tornillo autorroscante.
El conductor que posibilita la conexión tendrá una lengüeta anular del tamaño
adecuado y un hilo igual o superior a 12 AWG.
PRECAUCIÓN
Para evitar dañar a un sistema de control que utilice un alternador o dispositivo
cargador de batería, asegúrese de que el dispositivo cargador esté desconectado
antes de desconectar la batería del sistema.
Los controles electrónicos contienen partes sensibles a la estática. Observe las
siguientes precauciones para evitar dañar estas partes.
• Descargue la estática de su cuerpo antes de manejar el control (con la energía
que va al control desconectada, haga contacto con una superficie aterrizada y
manténgalo mientras maneja el control).
• Evite todo plástico, vinil y unicel (excepto versiones antiestáticas) cerca de las
tablillas de circuitos impresos (TCI).
• No toque los componentes o conductores en una TCI con sus manos o con
dispositivos conductivos.
Woodward Governor Company se reserva el derecho de actualizar cualquier parte de esta publicación en cualquier
momento. La información proporcionada por Woodward Governor Company se considera correcta y fiable. Sin
embargo, Woodward Governor Company no asume responsabilidad alguna a menos que haya sido aceptada
expresamente.
DEFINICIONES IMPORTANTES
ADVERTENCIA—indica una situación potencialmente peligrosa que, de no evitarse,
podría causar graves lesiones o la muerte.
PRECAUCIÓN
podría causar desperfectos al equipo.
—proporciona información útil que no se enmarca en las categorías de
NOTA
advertencia o precaución.
—indica una situación potencialmente peligrosa que, de no evitarse,
© Woodward 2000
Todos los Derechos Reservados
Page 3

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Índice
CAPÍTULO 1. INFORMACIÓN GENERAL..........................................................1
Introducción............................................................................................................1
Notas y advertencias de obligado cumplimiento....................................................1
Valores nominales eléctricos del control................................................................1
CAPÍTULO 2. ADVERTENCIA SOBRE DESCARGAS ELECTROSTÁTICAS ............3
CAPÍTULO 3. DESCRIPCIÓN GENERAL DEL CONTROL....................................4
Introducción............................................................................................................4
Interfaz del operador ..............................................................................................6
CAPÍTULO 4. DESCRIPCIÓN GENERAL DEL SOFTWARE................................16
Introducción..........................................................................................................16
Pantallas de estado..............................................................................................16
Registro de alarmas/eventos................................................................................28
Menús de configuración.......................................................................................29
Paradas y alarmas................................................................................................39
Control del motor..................................................................................................44
Sincroscopio.........................................................................................................46
Control de carga real............................................................................................49
Control de carga reactiva.....................................................................................52
Control de proceso...............................................................................................53
Conmutador de transferencia...............................................................................56
Menú de calibración .............................................................................................60
CAPÍTULO 5. CARACTERÍSTICAS Y FUNCIONES DEL CONTROL..................... 68
Control del motor..................................................................................................68
Protección del motor.............................................................................................68
Control de tensión y carga reactiva del generador ..............................................68
Protección del generador.....................................................................................68
Detección de red eléctrica....................................................................................69
Sincronización......................................................................................................69
Control de carga...................................................................................................69
Secuencia.............................................................................................................69
Virado del motor...................................................................................................70
Control de tensión del generador.........................................................................71
Control de carga del generador............................................................................72
Funciones automáticas de carga del generador..................................................77
Descripción del sincronizador ..............................................................................80
Adaptación de tensiones..................................................................................82
Secuencia del generador .....................................................................................87
Comunicación entre controles (Red RS-485) ......................................................97
Control/Monitorización remotos (RS-422)............................................................98
CAPÍTULO 6. CALIBRACIÓN DE ENTRADAS Y SALIDAS DE CONTROL.............99
Introducción..........................................................................................................99
Calibración de los PT y CT del generador.........................................................100
Calibración de PT de bus...................................................................................104
Salida de polarización de velocidad...................................................................105
Salida de polarización de tensión.......................................................................106
CAPÍTULO 7. INSTRUCCIONES GENERALES DE ARRANQUE ........................ 107
Antes de arrancar el grupo electrógeno.............................................................107
Secuencia de parámetros de arranque y comprobación...................................108
Carga del grupo electrógeno..............................................................................108
Unidades en paralelo a la red ............................................................................109
Woodward i
Page 4

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Índice
CAPÍTULO 8. RESOLUCIÓN DE PROBLEMAS ..............................................112
Hardware y E/S del control................................................................................ 112
Parámetros de control/detección del motor ...................................................... 113
Sincronización ................................................................................................... 114
Control de cierre/apertura del disyuntor............................................................ 115
Control de carga real......................................................................................... 116
Control de carga reactiva .................................................................................. 117
Secuencia.......................................................................................................... 118
Detección de red/bus......................................................................................... 119
Comunicaciones................................................................................................ 119
CAPÍTULO 9. DEFINICIÓN DE TÉRMINOS....................................................120
CAPÍTULO 10. OPCIONES DE SERVICIO.....................................................126
Opciones de servicio del producto.................................................................... 126
Devolución de equipos para reparación............................................................ 127
Piezas de repuesto............................................................................................ 128
Forma de establecer contacto con Woodward.................................................. 128
Servicios de ingeniería...................................................................................... 129
Asistencia técnica.............................................................................................. 131
APÉNDICE A. HOJA DE TRABAJO DE PUNTOS DE CONSIGNA DEL EGCP-2 .132
Menú Configuration (Configuración) ................................................................. 132
Menú Shutdown and Alarms (Paradas y alarmas)............................................ 133
Menú Engine Control (Control del motor).......................................................... 135
MENÚ SYNCHRONIZER (SINCRONIZADOR)................................................ 137
MENÚ REAL LOAD CONTROL (CONTROL DE CARGA REAL) .................... 138
MENÚ REACTIVE LOAD CONTROL (CONTROL DE CARGA REACTIVA)... 139
MENÚ PROCESS CONTROL (CONTROL DE PROCESO) ............................ 140
MENÚ TRANSFER SWITCH (CONMUTADOR DE TRANSFERENCIA)......... 141
MENÚ SEQUENCING AND COMMS (SECUENCIA Y COMUNICACIONES) 142
MENÚ CALIBRATION (CALIBRACIÓN)........................................................... 143
APÉNDICE B. INSTRUCCIONES DE DESCARGA...........................................144
Finalidad............................................................................................................ 144
Requisitos.......................................................................................................... 144
Instrucciones ..................................................................................................... 144
ESPECIFICACIONES DEL CONTROL EGCP-2..............................................149
Illustraciones y tablas
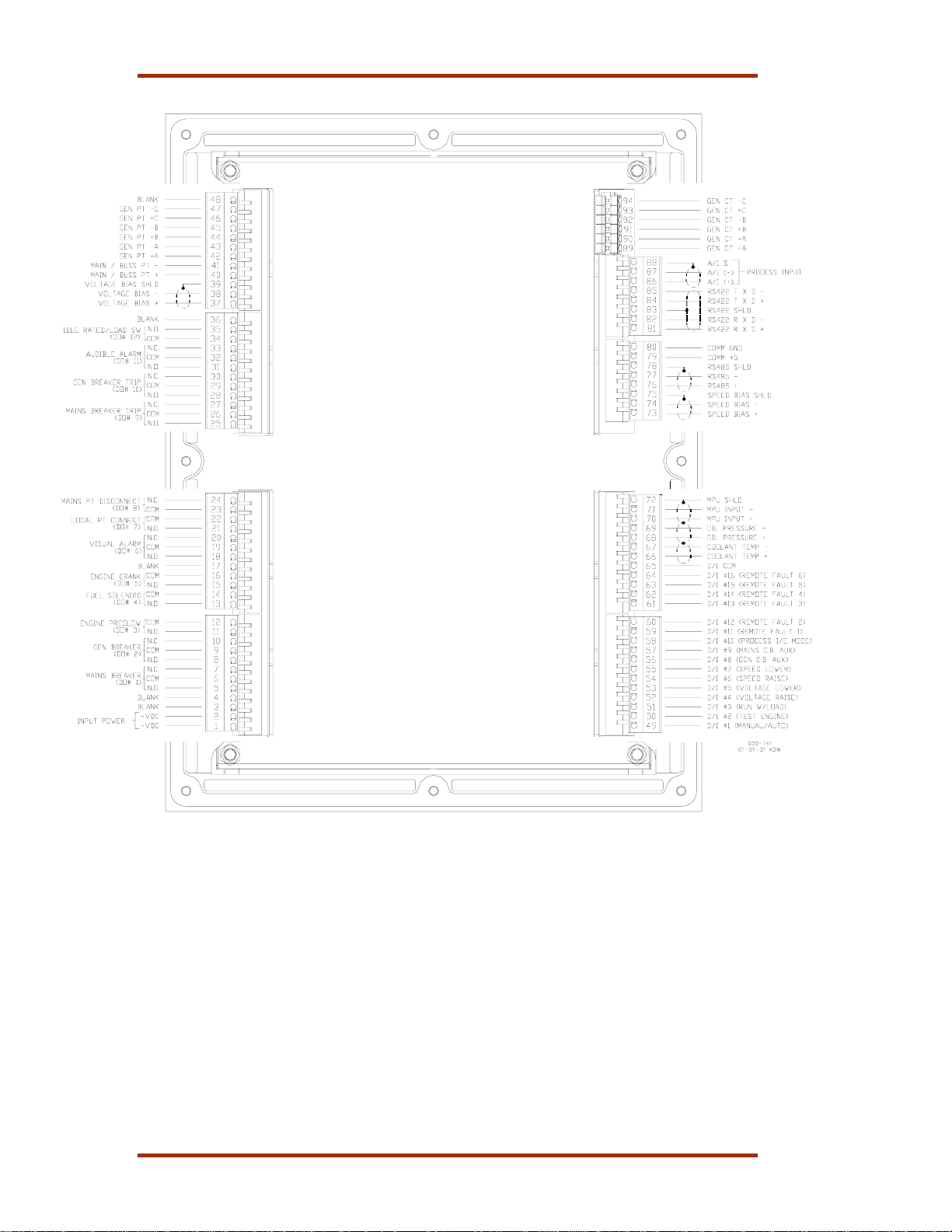
Figura 1-1. Diagrama del cableado del EGCP-2....................................................2
Figura 3-1. Interfaz del operador............................................................................6
Figura 3-2a. Desplazamiento por el EGCP-2.......................................................11
Figura 3-2b. Desplazamiento por el EGCP-2.......................................................12
Figura 3-2c. Desplazamiento por el EGCP-2 (continuación)...............................13
Figura 3-2d. Desplazamiento por el EGCP-2 (continuación)...............................14
Figura 3-2e. Desplazamiento por el EGCP-2 (continuación)...............................15
Figura 4-1. Descripción general del sistema con el motor fuera de línea............17
Figura 4-2. Pantalla de estado del sistema – Isócrono........................................18
Figura 4-3. Pantalla de estado del sistema – Carga base...................................19
ii Woodward
Page 5

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Illustraciones y tablas
Figura 4-4. Descripción general del motor...........................................................19
Figura 4-5. Estado del generador (Tensión línea a línea) ...................................20
Figura 4-6. Estado de E/S....................................................................................21
Figura 4-7. Estado del sincronizador ...................................................................22
Figura 4-8. Estado de carga en KW.....................................................................23
Figura 4-9. Estado de PF/KVAR ..........................................................................24
Figura 4-10. Menú Sequencing (Secuencia)........................................................25
Figura 4-11. Menú Sequencing (Unidades múltiples)..........................................26
Figura 4-12. Estado de ATS (conmutador de transferencia automática) ............27
Figura 4-13. Pantalla de alarmas y eventos.........................................................28
Figura 4-14. Registro de eventos vacío ...............................................................29
Figura 4-15. Pantalla de código de seguridad .....................................................30
Figura 4-16a. Lista del menú Configuration (pantalla 1)......................................30
Figura 4-16b. Lista del menú Configuration (pantalla 2)......................................31
Figura 4-16c. Lista del menú Configuration (pantalla 3)......................................31
Figura 4-17. Triángulo de Potencia CA................................................................35
Figura 4-18. Lógica de disyuntores y lógica de contactores................................38
Figura 4-19. Alarmas de tensión alta/baja del generador....................................39
Figura 4-20. Sobrefrecuencia/Subfrecuencia del generador...............................40
Figura 4-21. La corriente se sitúa en 160 A, se recibe una Alarma o Parada en
10 segundos....................................................................................42
Figura 4-22. La corriente se sitúa en 176 A, se recibe una Alarma o Parada en 5
segundos.........................................................................................43
Figura 4-23. La corriente se sitúa en 152 A, se recibe una Alarma o Parada en
20 segundos....................................................................................43
Figura 4-24. Inversión de corriente ......................................................................44
Figura 4-25. Circuito típico utilizando la función Permissive (Autorización) y
funcionamiento para sincronización automática/manual ................47
Figura 4-26. Adaptación de tensiones (Punto de consigna 1%)..........................48
Figura 4-27. Ventana de fase máxima = 10 grados.............................................48
Figura 4-28. Acción directa de proceso (Exportar) ..............................................53
Figura 4-29. Acción indirecta de proceso (Importar potencia).............................53
Figura 4-30. Acción directa de Proceso (Importar/Exportar) ...............................54
Figura 4-31. Conmutador DIP del control EGCP-2..............................................54
Figura 4-32. Medido en comparación con monitorizado......................................61
Figura 4-33. AVR típico con entrada auxiliar (Newage SX-440)..........................62
Figura 4-34. AVR típico con potenciómetro externo de ajuste de tensión...........62
Figura 4-35. Caída de AVR..................................................................................62
Figura 4-36. Entrada proporcional directa para la entrada de temperatura del
agua o de presión del aceite ...........................................................64
Figura 4-37. Osciladores controlados por tensión — Efecto de desviación........64
Figura 4-38. Osciladores controlados por tensión — Efecto de ganancia...........65
Figura 4-39. VCO de la batería............................................................................65
Figura 4-40. VCO de la presión de aceite............................................................66
Figura 4-41. VCO de la temperatura del agua.....................................................67
Figura 5-1. Modo de caída...................................................................................74
Figura 5-2. Modo isócrono ...................................................................................74
Figura 5-3. Compartimiento de carga caída/isócrono..........................................75
Figura 5-4. Línea temporal del sincronizador — Secuencia estándar.................85
Figura 5-5. Detección de pérdida de red activa...................................................85
Figura 5-6. Generador fuera de línea...................................................................86
Figura 5-7. Unidad en paralelo a la red con detección de tensión/frecuencia.....86
Figura 5-8. Unidad(es) en paralelo a la red con detección de aumento brusco de
carga................................................................................................87
Figura 5-9. Rutina típica de secuencia automática..............................................88
Woodward iii
Page 6
Conjunto de control de generador y motor EGCP-2 Manual SP26086
Illustraciones y tablas
Figura 5-10. Configuración inicial del sistema .....................................................91
Figura 5-11. Tras un cambio de prioridad las unidades no funcionan.................91
Figura 5-12. Configuración inicial del sistema .....................................................92
Figura 5-13. Una nueva unidad maestra toma el control — Unidad sencilla
funcionando en el bus aislado.........................................................93
Figura 5-14. Cambio de prioridad de una unidad esclava ...................................94
Figura 5-15. Cambio de prioridad de una unidad esclava ...................................94
Figura 5-16. Cambio de prioridad de una unidad esclava ...................................95
Figura 5-17. Cambio de prioridad de una unidad esclava ...................................96
Figura 5-18. Cambio de prioridad de una unidad esclava ...................................96
Figura 5-19. Cambio de prioridad de una unidad esclava ...................................97
Figura 6-1. Relación entre polarización de tensión y tensión del generador.... 106
PRECAUCIÓN
Los controles electrónicos contienen piezas sensibles a la electricidad estática.
Adopte las siguientes precauciones para evitar que estas piezas puedan resultar
dañadas.
• Descargue la electricidad estática del cuerpo antes de manipular el control (con
la alimentación eléctrica del control desconectada, haga contacto con una
superficie conectada a tierra y mantenga el contacto mientras manipule el
control).
• Evite tener piezas de plástico, vinilo y espuma de estireno (excepto las
versiones antiestáticas) cerca de las tarjetas de circuito impreso.
• No toque componentes ni conductores de una tarjeta de circuito impreso con
las manos o con elementos conductores.
PRECAUCIÓN
La instalación debe incluir lo siguiente:
• La red de alimentación principal debe disponer de los fusibles adecuados que
establecen las instrucciones de instalación y los correspondientes requisitos
del cableado.
• La instalación estructural comprenderá un interruptor o disyuntor, situado muy
próximo al equipo, que el operador pueda alcanzar cómodamente y marcado
claramente como dispositivo de desconexión del equipo. El interruptor o
disyuntor sólo corta la corriente que llega al equipo; aún pueden quedar
tensiones peligrosas conectadas a otros terminales del equipo.
iv Woodward
Page 7
Manual SP26086 Conjunto de control de generador y motor EGCP-2
Capítulo 1.
Información general
Introducción
Este manual describe el Conjunto de control de generador y motor EGCP-2 de
Woodward, modelos 8406-115 y 8406-116 (intervalo de tensión máxima de
entrada 9-32 Vcc).
Notas y advertencias de obligado cumplimiento
Notas y advertencias generales relativas a la instalación y el
funcionamiento
• El EGCP-2 sólo es apto para su uso en atmósferas no peligrosas.
• El cableado tiene ajustarse a los reglamentos vigentes en materia de
electricidad y a lo establecido por la autoridad competente.
• El cableado en obra debe ser apto al menos para 90°C.
• Conecte el terminal de tierra a tierra de protección (PE).
• Más de un circuito con tensión aplicada (véase diagrama de cableado).
Valores nominales eléctricos del control
Número de
pieza
8406-115
8406-116
Intervalo de
tensión
nominal de
alimentación
10 -29 Vcc
(Sistemas de
12 o 14
voltios)
Consumo
máximo de
potencia a la
tensión nominal
20 vatios 150–300 Vca
Intervalo de
tensión máxima
de entrada del
eficaces
50–150 Vca
eficaces
PT
Intervalo de
corriente
máxima de
entrada del CT
0–6 A eficaces 40 a 70 Hz
Intervalo de
frecuencia
máxima del
generador
Woodward 1
Page 8
Conjunto de control de generador y motor EGCP-2 Manual SP26086
Figura 1-1. Diagrama del cableado del EGCP-2
2 Woodward
Page 9

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Capítulo 2.
Advertencia sobre descargas
electrostáticas
Todos los equipos electrónicos son sensibles a la electricidad estática, algunos
componentes más que otros. Para proteger estos componentes contra daños
causados por descargas de electricidad estática, deben adoptarse precauciones
especiales para minimizar o eliminar las descargas electrostáticas.
Adopte estas precauciones cuando trabaje con el control o cerca de él.
1. Antes de hacer operaciones de mantenimiento en un control electrónico,
descargue la electricidad estática de su cuerpo a tierra tocando y sujetando
un objeto metálico conectado a tierra (tuberías, armarios, equipos, etc.).
2. Evite la acumulación de electricidad estática en su cuerpo no vistiendo
ropas fabricadas con materiales sintéticos. Lleve ropas de algodón o
mezclas de algodón en la medida de lo posible, ya que estas ropas no
almacenan cargas electrostáticas en la misma medida que los tejidos
sintéticos.
3. Mantenga los materiales de plástico, vinilo y espuma de estireno (como
vasos de plástico o de espuma de estireno, portavasos, paquetes de
cigarrillos, envolturas de celofán, libros o carpetas de vinilo, botellas de
plástico y ceniceros de plástico) alejados del control, de los módulos y de la
zona de trabajo todo lo posible.
4. No desmonte ninguna tarjeta de circuito impreso (PCB) del armario de
control a menos que sea absolutamente necesario. Si tiene que desmontar
alguna PCB del armario de control, adopte las siguientes precauciones:
• No toque ninguna parte de la PCB excepto los bordes.
• No toque los conductores eléctricos, los conectores o los componentes
con dispositivos conductores o con las manos.
• Cuando vaya a cambiar una PCB, mantenga la nueva PCB en la bolsa
protectora antiestática de plástico hasta que llegue el momento de
instalarla. Inmediatamente después de desmontar la PCB antigua del
armario de control, colóquela en la bolsa protectora antiestática.
PRECAUCIÓN
Para evitar daños en componentes electrónicos causados por una
manipulación incorrecta, lea y observe las precauciones que se indican en
el manual 82715, Guía para la manipulación y protección de controles
electrónicos, tarjetas de circuito impreso y módulos.
Woodward 3
Page 10

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Capítulo 3.
Descripción general del control
Introducción
El EGCP-2 es un conjunto completo de control de carga y gestión del motor de
un generador, basado en microprocesador y diseñado para utilizarlo con un
control electrónico de velocidad del motor y un regulador de tensión
independiente. Entre las funciones del control figuran:
Control del motor
• Precalentamiento del motor
• Control del solenoide del combustible
• Control del arrancador del motor
• Temporizador de enfriamiento controlado por KVA
• Monitorización de la presión de aceite
• Monitorización de la temperatura del agua
• Monitorización de la tensión de batería
• Monitorización de velocidad con protección contra sobrevelocidad
• Salida de relé de vacío/nominal
Sincronización
• Procesamiento de señales digitales para eliminar problemas inducidos en
sistemas con alta proporción de armónicos, que provocan múltiples cruces
de curvas en punto cero de las formas de onda de tensión.
• Ventanas ajustables de fase y de tensión máximas y tiempos de parada.
Ventanas dotadas de una precisión tal que igualan errores de fase hasta de
2° y tensiones hasta del 0,1% respectivamente.
• Lógica de cierre seguro de bus inactivo en el interior del control.
• Reconexión de impactos múltiples, con retardos de tiempo ajustables,
resincronización automática y límites de tiempo de sincronizador, todos
disponibles.
• Ajustes manuales de tensión y velocidad para sincronización manual (la
comprobación de sincronización, Sync-Check, sigue activa durante los
paralelos manuales).
• Sincronización entre disyuntores del generador y de la red.
Control de carga real (kW)
• Cálculos genuinos de potencia eficaz para disponer de un control de carga
rápido y preciso aún en presencia de armónicos.
• Velocidades de cambio progresivo fluido escogidas por el usuario al entrar
y salir de cada modo de funcionamiento.
• Compartimiento isócrono de la carga hasta de 8 unidades basado en carga
porcentual (permite a máquinas con distintos valores nominales equilibrar
cargas en kW proporcionalmente).
• Carga base constante para un óptimo rendimiento del combustible con
entradas discretas para cambiar a distancia los niveles de carga.
• Control de importación/exportación con transductor externo de potencia.
• Función de transferencia blanda de la red eléctrica*)
• Niveles de carga base o niveles de referencia de proceso ajustables
externamente con velocidades de cambio progresivo independientes.
• Presencia de caída de kW para disponer de control de carga manual.
4 Woodward
Page 11

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Control reactivo (KVAR)
• Compartimiento de potencia reactiva (VAR) en buses aislados en función
de carga reactiva porcentual (permite a máquinas con distintos valores
nominales equilibrar cargas en KVAR proporcionalmente).
• Carga base según factor de potencia constante o VAR en unidades que
están en modo de control de carga base en kW o en modo de control del
proceso.
• Niveles de referencia de control de VAR (potencia reactiva) o PF (factor de
potencia) ajustables externamente.
• Caída de KVAR para control manual de VAR.
Secuencia automática del generador
• Arranca automáticamente otros generadores equipados con EGCP-2
cuando la carga sobrepasa un porcentaje especificado por el usuario de la
carga nominal de las máquinas en funcionamiento.
• Permite descargas controladas de motores cuando la carga es tan baja que
los demás motores no sobrepasan un porcentaje especificado por el
usuario de la carga nominal.
• La secuencia de prioridad de motor puede cambiarse desde cualquier
unidad o desde un PC para igualar el tiempo de funcionamiento.
Funciones de protección del generador
• Sobretensión y subtensión
• Sobrefrecuencia y subfrecuencia
• Inversión de corriente (retardo inverso)
• Pérdida de excitación
• Sobrecorriente (retardo inverso)
• Detección de pérdida de red
• Sobretensión y subtensión
• Sobrefrecuencia y subfrecuencia
• Aumento brusco de carga del generador
• Desajuste de velocidad y frecuencia
• Aumento brusco de la carga
• Conmutador de carga por KVA
Funciones de protección del motor
• Temperatura alta o baja del refrigerante
• Presión alta o baja del aceite
• Sobrevelocidad
• Sobrevirado
• Fallo de arranque
• Seis entradas discretas de fallo configurables por el usuario
Comunicación – Interfaz de PC
• Carga y descarga sencilla de puntos de consigna de configuración
• Un PC puede controlar o monitorizar cualquier unidad situada en un
emplazamiento mediante una sola conexión con la red operativa local a
través de un puerto serie RS-422, utilizando los protocolos Modbus o
ServLink.
Woodward 5
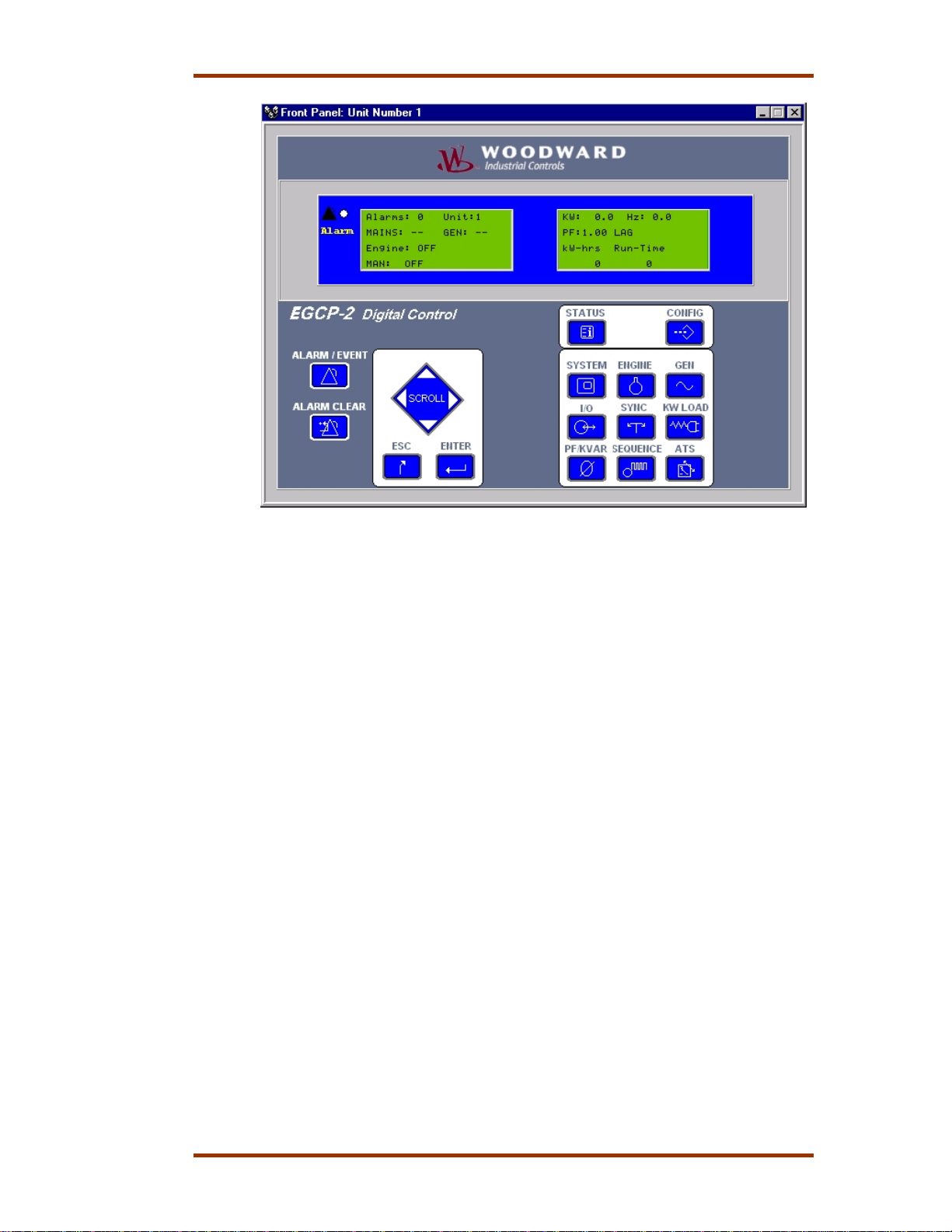
Page 12
Conjunto de control de generador y motor EGCP-2 Manual SP26086
Interfaz del operador
La interfaz de operador del EGCP-2 está diseñada para posibilitar la simplicidad
y redundancia de funciones en todos los modos de funcionamiento. Para ofrecer
al operador diversos datos de funcionamiento y estado, así como para leer
puntos de consigna de configuración y datos de las alarmas, se usan dos
pantallas de cristal líquido (LCD) retroiluminadas. La retroiluminación de las
pantallas LCD permanece activa siempre que la velocidad del motor sobrepasa
50 rpm. Cuando el motor se para, la retroiluminación se desconecta a los cinco
minutos. Si se pulsa una vez una tecla del panel frontal la retroiluminación se
conecta y si se pulsa una segunda vez se realiza esa función. La
retroiluminación se apaga si transcurren cinco minutos sin utilizar el control y el
motor está parado.
NOTA
La interfaz de operador del EGCP-2 sólo puede utilizarse para configurar y
monitorizar la unidad. Los comandos para arrancar y parar, sincronizar o
seleccionar el modo de la unidad no pueden emitirse a través del panel
frontal del EGCP-2.
PRECAUCIÓN
Un uso inadecuado de estas herramientas de software podría dar lugar a
una situación de inseguridad. Sólo deberá poder acceder a estas
herramientas personal cualificado.
Las pantallas ofrecen ocho líneas de información de estado, con la opción de
mostrar otras cuatro de información sobre ajuste de puntos de consigna o sobre
el registro de alarmas. Estas pantallas permiten al usuario monitorizar y ajustar
simultáneamente parámetros relacionados.
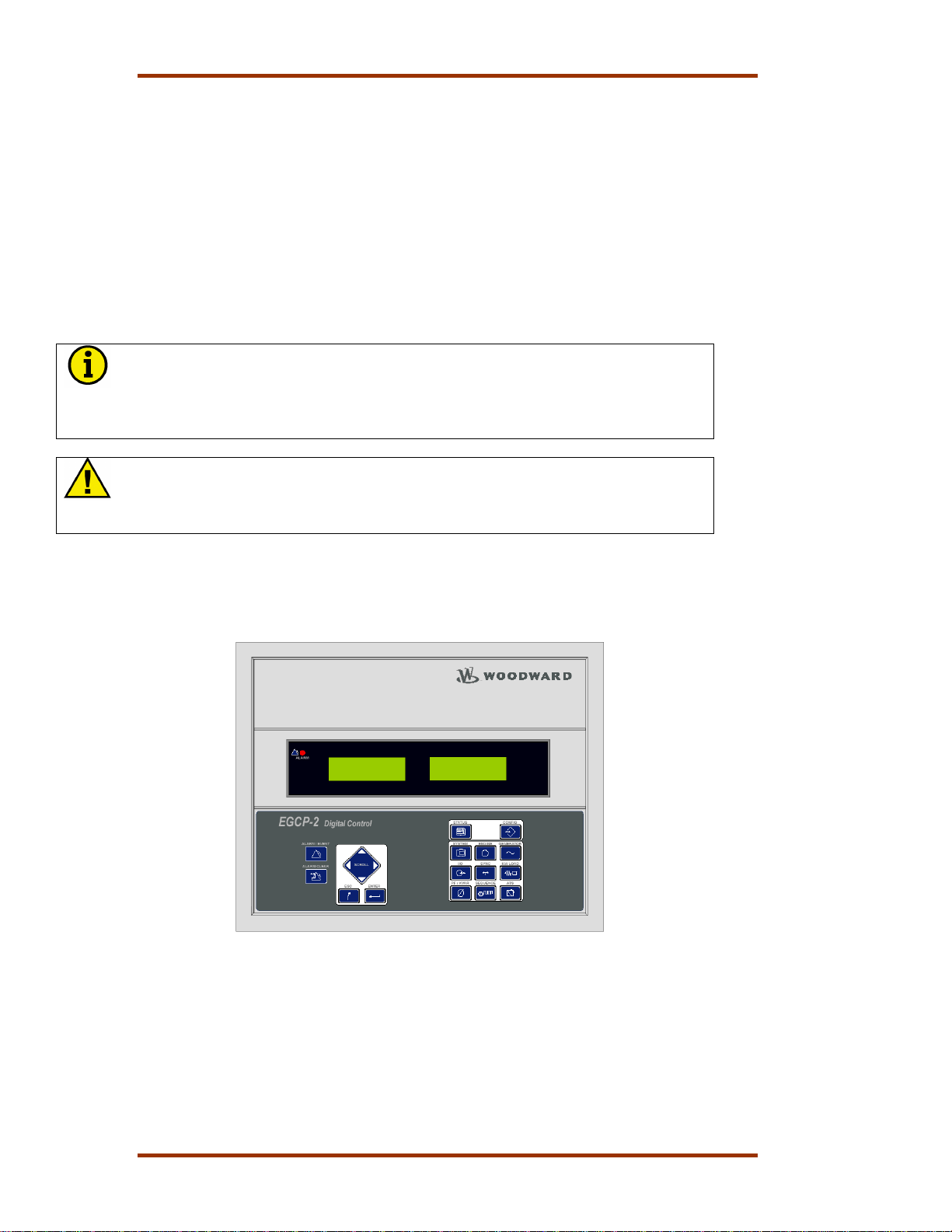
Figura 3-1. Interfaz del operador
Un diodo fotoemisor (LED) rojo situado en la superficie del control se usa para
indicar una situación de alarma mediante parpadeo continuo, y para indicar una
situación de parada mediante encendido continuo.
Tiene un teclado de 19 teclas. Cada tecla puede realizar las siguientes
funciones:
6 Woodward
Page 13
Manual SP26086 Conjunto de control de generador y motor EGCP-2
TECLAS DEL REGISTRO DE ALARMAS Y EVENTOS
ALARM / EVENT
La tecla ALARM/EVENT (alarma/evento) se usa para
acceder al registro de eventos. Al pulsarla, en la pantalla LCD del lado derecho
se muestran los eventos de alarma actuales. Cuando hay varias alarmas
registradas, las teclas de avanzar página y retroceder página permiten
desplazarse por el interior del registro de eventos. El registro de eventos
contiene hasta 16 eventos; a medida que se producen nuevos eventos, las
alarmas más antiguas se eliminan para hacer sitio a las más recientes. Si se
reinicializa la alimentación del control, el registro de eventos se borra.
ALARM CLEAR
La tecla ALARM CLEAR (borrar alarmas) se usa para
acusar recibo y borrar eventos de alarma del registro de eventos. Para acusar
recibo y borrar eventos de alarma y parada, es necesario disponer de un código
de seguridad del nivel de operador o superior. Tras seleccionar la tecla
ALARM/EVENT:
Si el modo de alarma es Visual o Warning (advertencia)
1. Al pulsar la tecla ALARM CLEAR se acusa recibo de la alarma
seleccionada, lo que significa que el cursor se desplaza de la línea Alarm
Name (nombre de alarma) a la línea Time and Date (hora y fecha).
2. Al pulsar la tecla Alarm Clear por segunda vez el evento desaparece del
registro.
Si el modo de alarma/parada es Audible (Acústica), Soft Shutdown (Parada
blanda) o Hard Shutdown (Parada dura)
1. Al pulsar una vez la tecla ALARM CLEAR se desactiva la salida discreta nº
11, Audible Alarm (alarma acústica). Esto sucede sin seleccionar la tecla
ALARM/EVENT y sin haber introducido un código de seguridad.
2. Pulsada la tecla ALARM/EVENT, de modo que se está viendo el registro de
eventos: Al pulsar la tecla ALARM CLEAR por segunda vez se acusa recibo
de la alarma seleccionada. Esto significa que el cursor se desplaza de la
línea Alarm Name a la línea Time and Date.
3. Al pulsar la tecla Alarm Clear por tercera vez el evento desaparece del
registro.
Woodward 7
Page 14
Conjunto de control de generador y motor EGCP-2 Manual SP26086
TECLAS DE DESPLAZAMIENTO y AJUSTE
SCROLL
La tecla SCROLL (desplazamiento) se usa para desplazar
el cursor hacia arriba, hacia abajo, hacia la derecha y hacia la izquierda. Se usa
también para aumentar y reducir valores cuando se está en los menús de
configuración.
ESC
La tecla ESCAPE se usa para desplazarse hacia arriba y salir
de los niveles de los menús de configuración. Se usa también al ajustar un valor
para restablecer el valor anterior, si el valor nuevo no se ha introducido en la
memoria (véase la tecla Enter a continuación).
ENTER
La tecla ENTER (intro) se usa para desplazarse hacia abajo y
entrar en los niveles de los menús de configuración. Se usa también al ajustar
un valor para introducir el valor nuevo en la memoria. Actúa también como
medio para consignar elementos de los eventos de alarma en la lista de eventos
de alarma sin eliminarlos. Esto se conoce como registrar el elemento del evento
de alarma. Al pulsar la tecla Enter estando en el elemento seleccionado de
alarma/evento, dicho elemento se “guarda” en la lista de eventos. Si el evento de
alarma seleccionado era un evento de alarma activo, la acción o acciones
asociadas al evento de alarma también se borran de la lógica del control.
TECLAS DE ESTADO Y CONFIGURACIÓN
STATUS
i
La tecla STATUS (estado), cuando se pulsa, pone las
pantallas LCD derecha e izquierda en el modo de visualización de estado. Las
pantallas de estado ofrecen información sobre distintos elementos del
funcionamiento del motor y del grupo electrógeno. Para detalles sobre las
diversas teclas de estado, véanse las teclas del STATUS MENU (menú de
estado), que se explican más adelante. En los menús de estado no figuran
valores ajustables.
8 Woodward
Page 15
Manual SP26086 Conjunto de control de generador y motor EGCP-2
CONFIG
...
La tecla CONFIG (configuración), cuando se pulsa, pone la
pantalla LCD derecha en el modo de configuración. En la pantalla derecha se
muestran los elementos del menú Configuration. En la pantalla izquierda seguirá
mostrándose información de estado. Dado que en el menú de configuración
figuran diversos elementos de menú y ajustes, en la pantalla derecha aparece
un cursor intermitente cuando el modo de configuración está activo.
TECLAS DE LOS MENÚS DE ESTADO
El contenido de los diversos menús de estado se describe en la sección
Pantallas de estado del capítulo 4 de este manual.
SYSTEM
La tecla SYSTEM STATUS (estado del sistema), cuando se
pulsa, presenta información sobre el estado del sistema. La pantalla de estado
del sistema es también la pantalla de visualización de estado predeterminada
(es siempre la primera pantalla que aparece al encender el control). Esta
pantalla muestra información general sobre el funcionamiento del grupo
electrógeno del motor.
ENGINE
La tecla ENGINE STATUS (estado del motor), cuando se pulsa,
presenta información de estado sobre las funciones y el funcionamiento del
motor.
GEN
La tecla GEN STATUS, cuando se pulsa, presenta parámetros
del generador trifásico.
I/O
La tecla I/O STATUS (estado de E/S) indica el estado de todas
las entradas y salidas discretas, así como información sobre entradas y salidas
analógicas.
Woodward 9
Page 16
Conjunto de control de generador y motor EGCP-2 Manual SP26086
SYNC
La tecla SYNC STATUS (estado de sincronización) ofrece
información de estado relativa al sincronizador del disyuntor del generador y del
disyuntor de la red eléctrica.
KW LOAD
La tecla KW LOAD STATUS (estado de carga en KW),
cuando se pulsa, ofrece información de estado relativa al control de carga en
KW del EGCP-2.
PF / KVAR
Pulse la tecla PF/KVAR STATUS (estado de PF/KVAR) para
ver información del Modo VAR/PF (Potencia reactiva/Potencia de la central), así
como tensión y corriente del generador trifásico.
SEQUENCE
La tecla SEQUENCE STATUS (estado de secuencia)
proporciona información sobre las secuencias de sistemas de unidades
múltiples. Los sistemas de una sola unidad, y las unidades que no están en
modo AUTO, no ofrecen información de estado en esta pantalla.
ATS
La tecla ATS STATUS (estado de ATS), cuando se pulsa,
muestra la información de estado correspondiente a las funciones del
conmutador de transferencia automática.
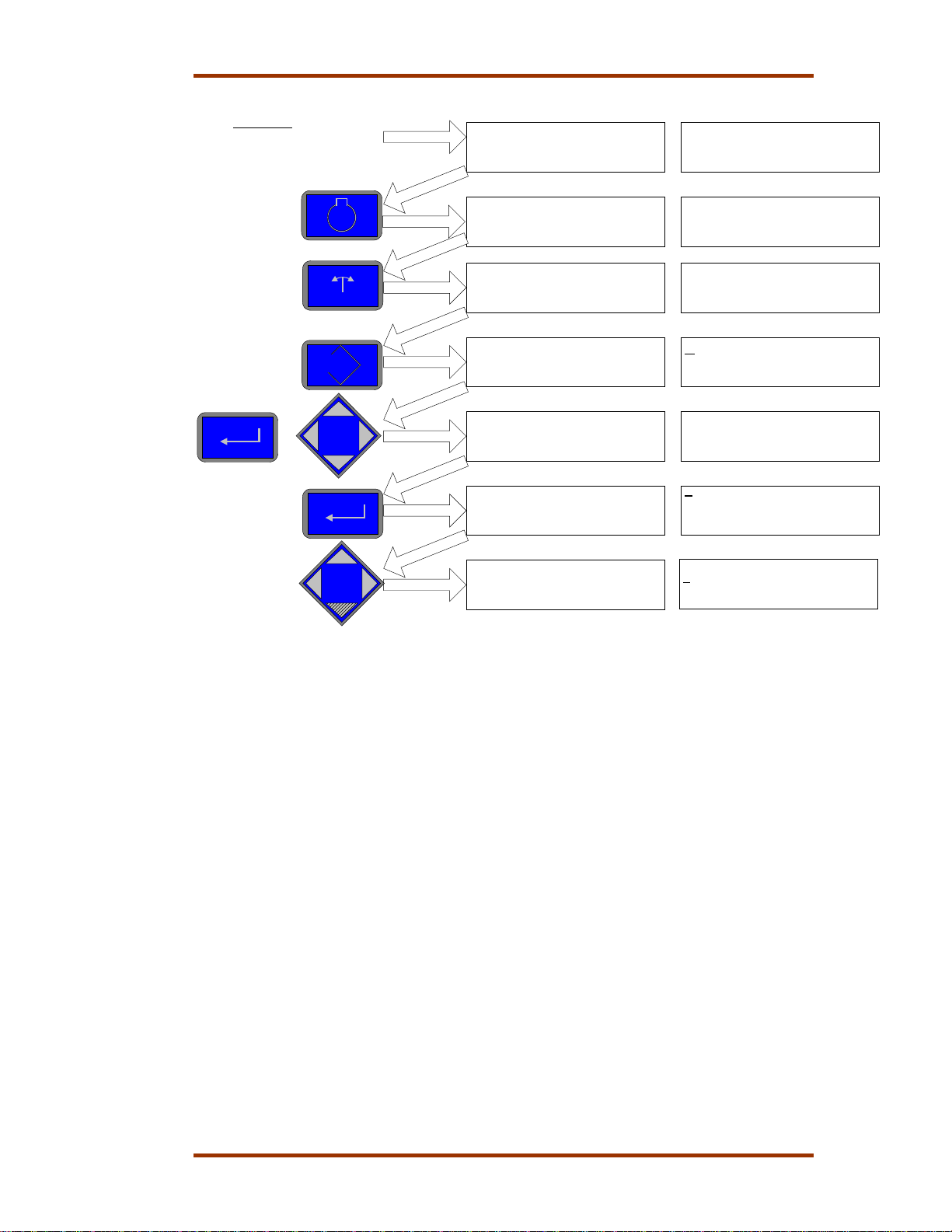
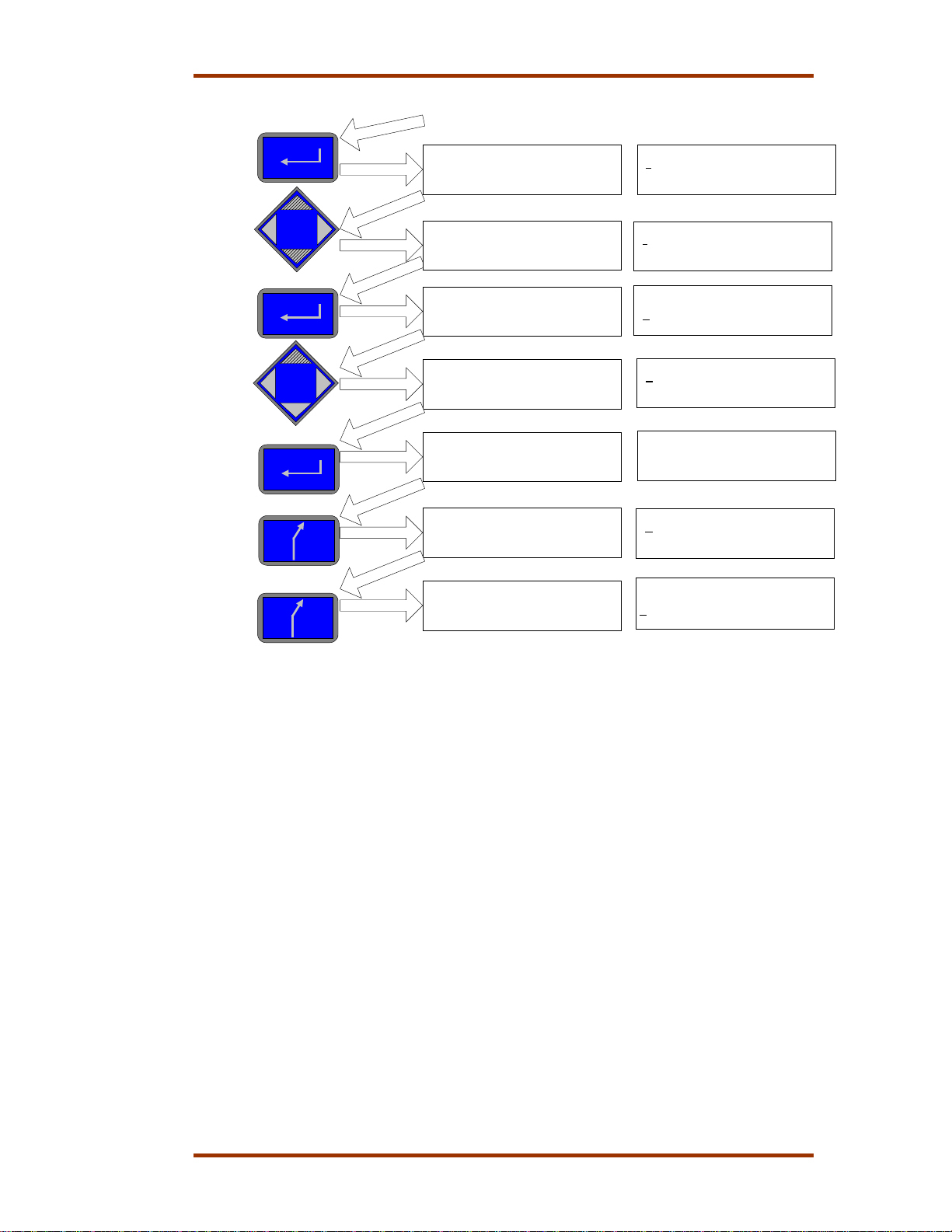
Procedimiento de desplazamiento
En los croquis siguientes se detalla un procedimiento paso a paso para
desplazarse por el software del EGCP-2. Además, se presentan las entradas de
pantalla típicas que se ven en cada paso.
10 Woodward
Page 17
Manual SP26086 Conjunto de control de generador y motor EGCP-2
KEYPRESS
Power Up
LEFT HAND LCD DISPLAY RIGHT HAND LCD DISPLAY
system status system status
ENGINE
prime mover status prime mover status
SYNC
synchronizer status synchronizer status
CONFIG
...
synchronizer status
SECURITY CODE
****
ENTER
VIS-140A
00-6-20
+
SCROLL
+
ENTER
SCROLL
synchronizer status
synchronizer status
synchronizer status
Figura 3-2a. Desplazamiento por el EGCP-2
SECURITY CODE
_ 0
---------------------------------------------------ENTER SECURITY CODE
Configuration
Shutdowns and Alarms
Engine Control
Synchronizer
Configuration
S
hutdowns and Alarms
Engine Control
Synchronizer
Woodward 11
Page 18
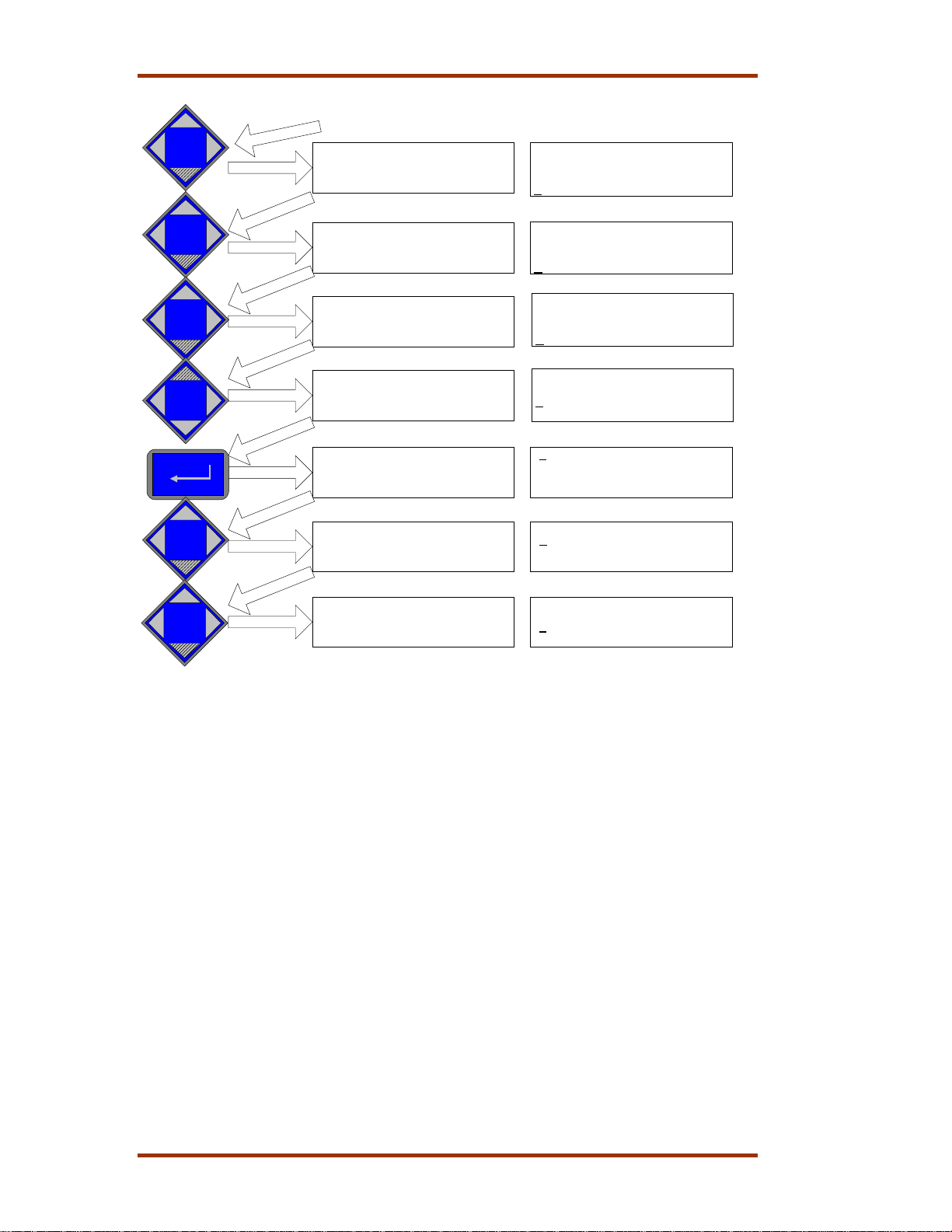
Conjunto de control de generador y motor EGCP-2 Manual SP26086
From Previous Page
SCROLL
synchronizer status
Configuration (*first item in list)
Shutdowns and Alarms
Engine Control
S
ynchronizer
ENTER
SCROLL
SCROLL
SCROLL
SCROLL
SCROLL
Shutdowns and Alarms
synchronizer status
Engine Control
Synchronizer
R
synchronizer status
synchronizer status
>AUTO SEQUENCING (*first item is list)
>MAX GEN LOAD
>NEXT GENSET DLY
>RATED LOAD DLY
>AUTO SEQUENCING (*first item is list)
>M
>NEXT GENSET DLY
>RATED LOAD DLY
>AUTO SEQUENCING (*first item is list)
>MAX GEN LOAD
>N
>RATED LOAD DLY
VIS-140B
00-6-20
synchronizer status
synchronizer status
synchronizer status
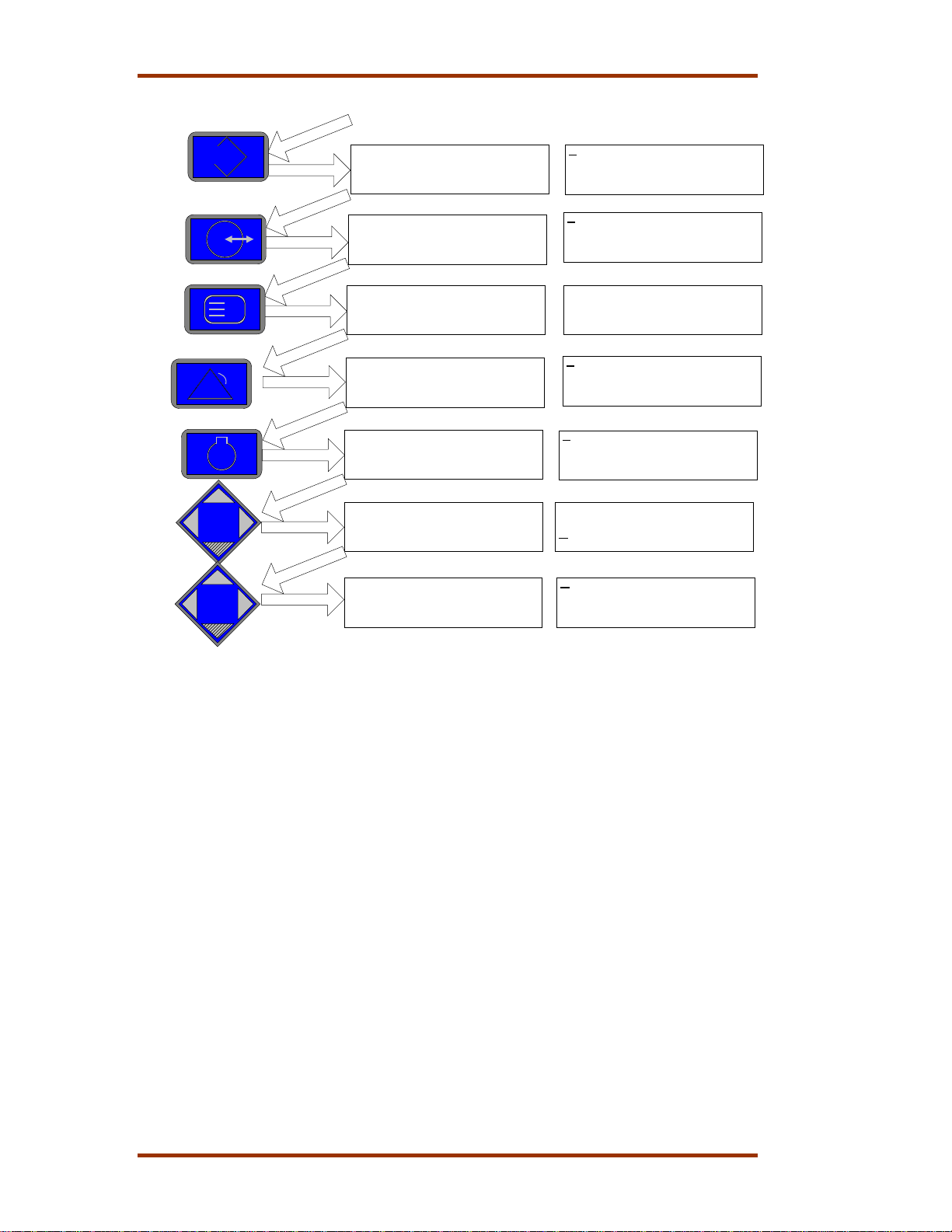
Figura 3-2b. Desplazamiento por el EGCP-2
eal Load Control
Process Control
Transfer Switch
Sequencing and Comms
C
alibration (*last item in list)
Process Control
Transfer Switch
S
equencing and Comms
Calibration (*last item in list)
AX GEN LOAD
EXT GENSET DLY
12 Woodward
Page 19
Manual SP26086 Conjunto de control de generador y motor EGCP-2
ENTER
From Previous Page
synchronizer status
NEXT GENSET DLY
Sec
30
-------------------WOODWARD EGCP2------------ CONFIGURATION MENUS
ENTER
ENTER
SCROLL
SCROLL
ESC
ESC
NEXT GENSET DLY
Sec
synchronizer status
synchronizer status
synchronizer status
synchronizer status
synchronizer status
29
-------------------WOODWARD EGCP2------------ CONFIGURATION MENUS
>AUTO SEQUENCING (*first item is list)
>MAX GEN LOAD
EXT GENSET DLY
>N
>RATED LOAD DLY
>AUTO SEQUENCING (*first item is list)
AX GEN LOAD
>M
>NEXT GENSET DLY
>RATED LOAD DLY
MAX GEN LOAD
60 %
---------------------SEQUENCING-------------------%KW: 0.0
>AUTO SEQUENCING (*first item is list)
AX GEN LOAD
>M
>NEXT GENSET DLY
>RATED LOAD DLY
Process Control
Transfer Switch
S
equencing and Comms
Calibration (*last item in list)
VIS-140C
00-6-20
synchronizer status
Figura 3-2c. Desplazamiento por el EGCP-2 (continuación)
Woodward 13
Page 20
Conjunto de control de generador y motor EGCP-2 Manual SP26086
CONFIG
...
I/O
STATUS
i
ALARM / EVENT
ENGINE
SCROLL
from previous page
Configuration
synchronizer status
input/output status
Shutdowns and Alarms
Engine Control
Synchronizer
Configuration
Shutdowns and Alarms
Engine Control
Synchronizer
input/output status input/output status
CRANK FAIL
input/output status
engine status
engine status
12:00 1 - 1
MAIN VOLT LOW ALM
12:00 1 - 1
CRANK FAIL
12:00 1 - 1
MAIN VOLT LOW ALM
12:00 1 - 1
CRANK FAIL
12:00 1 - 1
M
AIN VOLT LOW ALM
12:00 1 - 1
MAIN VOLT LOW ALM
SCROLL
VIS-140D
00-6-20
engine status
12:00 1 - 1
----------------------------------------------------
-------------------End of List-----------------
Figura 3-2d. Desplazamiento por el EGCP-2 (continuación)
14 Woodward
Page 21
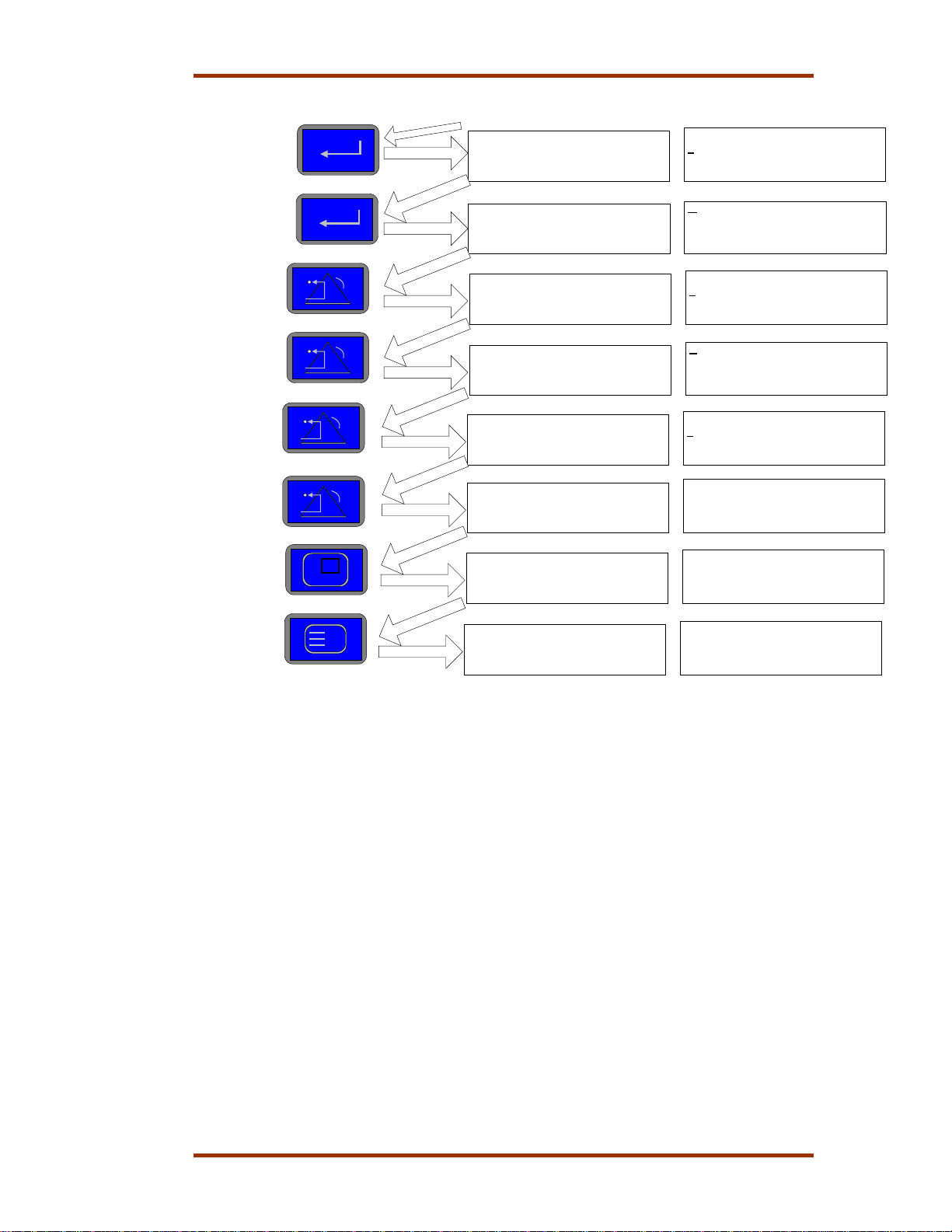
Manual SP26086 Conjunto de control de generador y motor EGCP-2
ENTER
ENTER
ALARM CLEAR
ALARM CLEAR
ALARM CLEAR
ALARM CLEAR
from previous page
engine status
engine status
engine status
engine status
engine status
MAIN VOLT LOW ALM
12:00 1 - 1
----------------------------------------------------
-------------------End of List-----------------
MAIN VOLT LOW ALM
12:00 1 - 1
----------------------------------------------------
-------------------End of List-----------------
MAIN VOLT LOW ALM
12:00 1 - 1
----------------------------------------------------
-------------------End of List-----------------
CRANK FAIL
12:00 1 - 1
----------------------------------------------------
-------------------End of List-----------------
CRANK FAIL
12:00 1 - 1
----------------------------------------------------
-------------------End of List-----------------
engine status
SYSTEM
system status
STATUS
i
VIS-140E
00-6-20
Figura 3-2e. Desplazamiento por el EGCP-2 (continuación)
system status
None Recorded
None Recorded
system status
Woodward 15
Page 22

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Capítulo 4.
Descripción general del software
Introducción
El software que se usa en el EGCP-2 recurre a lógica de mecanismos de estado
para accionar todos los modos. La lógica de mecanismos de estado se basa en
entradas discretas y en determinadas condiciones de funcionamiento que
desencadenan una secuencia de operaciones. La lógica de mecanismos de
estado emplea los siguientes mecanismos de estado para accionar el grupo
electrógeno:
• Cerrar disyuntor de red
• Abrir disyuntor de red
• Arrancar el motor
• Off
• Sincronizar
• Control de carga
• Cerrar disyuntor del generador
• Abrir disyuntor del generador
Diversas entradas y acciones indican el mecanismo de estado que se halla en
funcionamiento en un determinado momento.
Pantallas de estado
En el EGCP-2 hay en total nueve menús de estado. Use las teclas de estado del
panel del EGCP-2 para acceder a estos menús de estado. La información de los
menús de estado es dinámica y se actualiza aproximadamente cada 200
milisegundos (ms).
Cuando se arranca por primera vez el EGCP-2, aparece por defecto la pantalla
de estado del sistema. A continuación figura una muestra del aspecto que puede
presentar esta pantalla. A la pantalla de estado del sistema se puede acceder
desde cualquier otra pantalla de estado pulsando la tecla SYSTEM.
16 Woodward
Page 23
Manual SP26086 Conjunto de control de generador y motor EGCP-2
.
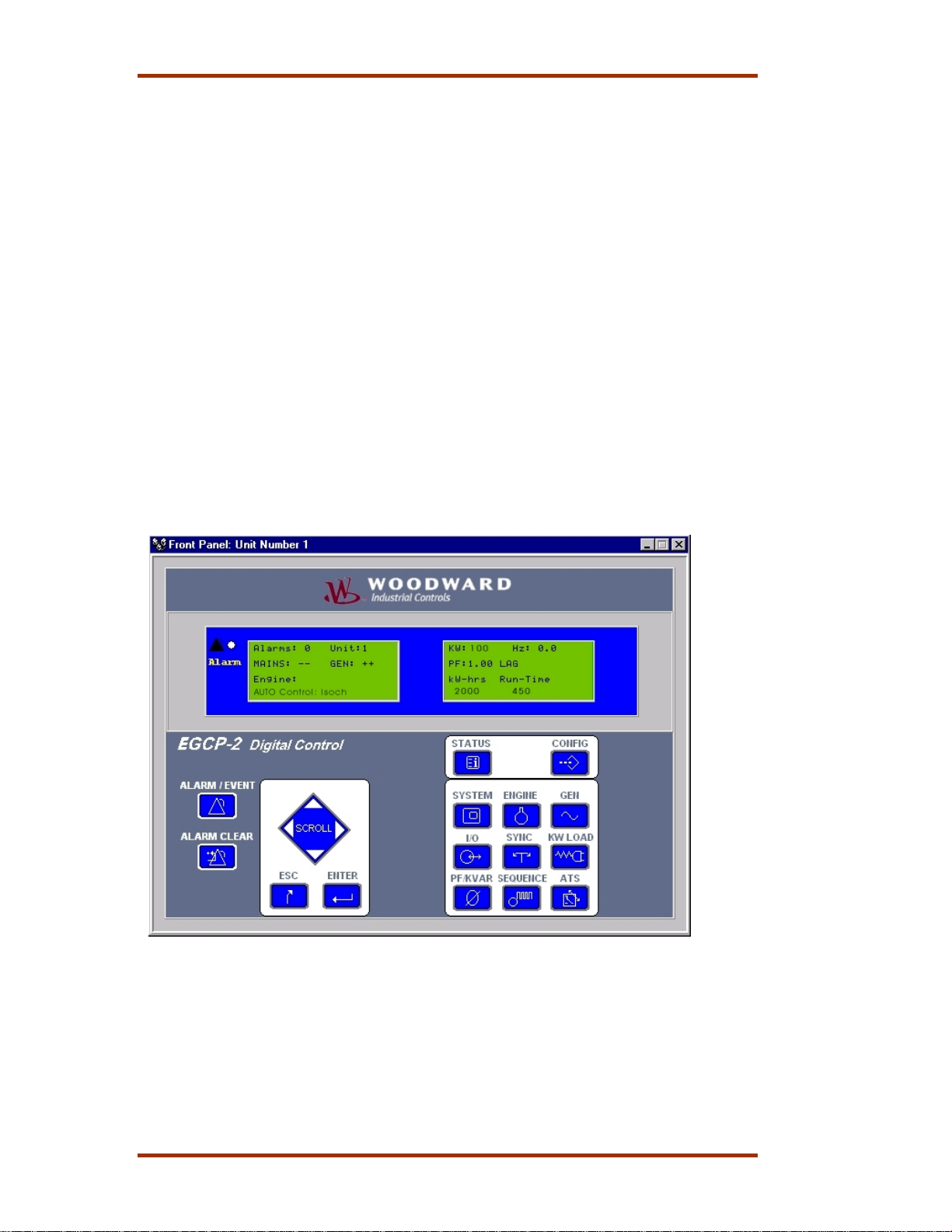
Figura 4-1. Descripción general del sistema con el motor fuera de línea
La pantalla muestra la información siguiente:
Alarms (alarmas:) Número de alarmas activas de la unidad.
Unit # (nº de unidad): La dirección de red operativa de la unidad.
Mains (red eléctrica): Una representación gráfica de la situación de la red
eléctrica. Dos signos menos (– –) indican que la red no se ajusta a las
especificaciones; un signo más indica que la red se ajusta a las
especificaciones, pero que no se ha declarado estable (+–); dos signos más (++)
indican que la red se ajusta a las especificaciones y que se halla estable.
Gen (Generador): Una representación gráfica del estado del generador. Dos
signos menos (– –) indican que el generador no se ajusta a las especificaciones;
un signo más indica que el generador se ajusta a las especificaciones, pero que
no se ha declarado estable (+–); dos signos más (++) indican que el generador
se ajusta a las especificaciones y que se halla estable.
Engine (motor): El estado de funcionamiento del motor.
Estados del control del motor:
OFF
PREGLOW (precalentamiento)
CRANK (virado)
RUN (funcionamiento)
COOLDOWN (enfriamiento)
SPINDOWN (pérdida de vueltas)
RETRY (reintentar)
Operating State (estado de funcionamiento): Indica si el EGCP-2 está en
modo AUTO (Automático) o MAN(ual).
Load Control State (estado del control de carga): Indica el estado de la lógica
del control de carga del EGCP-2. Los estados del control de carga son:
Woodward 17
Page 24
Conjunto de control de generador y motor EGCP-2 Manual SP26086
Estados del control de carga:
OFF
DROOP (caída)
ISOCHRONOUS (isócrono)
BASELOAD (carga base)
PROCESS (proceso)
KW: La carga total en KW del generador.
Hz: La frecuencia, en hertzios, del grupo electrógeno.
PF: El factor medio de potencia trifásica del grupo electrógeno.
KW-Hrs: El total acumulado de kW-horas producido por el grupo electrógeno.
Esta indicación pasa automáticamente a MW –Hrs cuando el valor kW-Horas
sobrepasa 10.000.
Run-Time (tiempo en funcionamiento): El total acumulado de tiempo en
funcionamiento del grupo electrógeno.
Toda la información de pantalla se actualiza automáticamente a medida que
cambian los modos y situaciones de funcionamiento del EGCP-2.
Este es el aspecto que presentaría la pantalla de estado del sistema con la red
no ajustada a las especificaciones, el motor en funcionamiento, transportando
isócronamente una carga de 100 kW, y la tensión del generador dentro de los
límites establecidos. Esta sería una pantalla típica si la unidad estuviese
configurada para detección de pérdida de red y se hubiese producido un fallo en
la red.
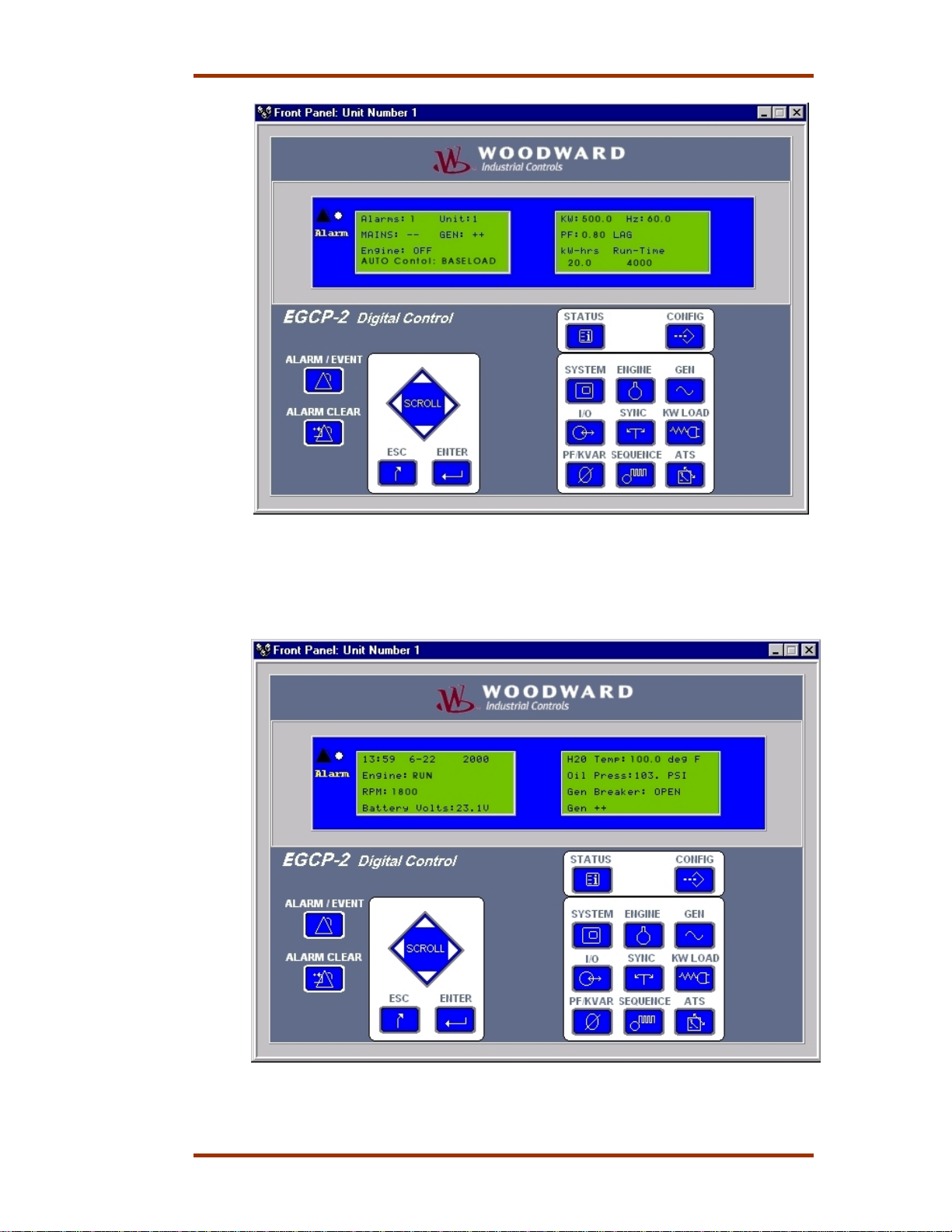
Figura 4-2. Pantalla de estado del sistema – Isócrono
Este es el aspecto que presenta la pantalla de descripción general del control en
el caso de un grupo electrógeno con carga base para la red, a 500 kW y con un
PF inductivo de 0,80, con una alarma de la que no se ha acusado recibo (no se
ha confirmado).
18 Woodward
Page 25
Manual SP26086 Conjunto de control de generador y motor EGCP-2
Figura 4-3. Pantalla de estado del sistema – Carga base
A continuación figura una descripción general de cada pantalla del menú de
estado, empezando por la descripción general del motor:
Figura 4-4. Descripción general del motor
Woodward 19
Page 26
Conjunto de control de generador y motor EGCP-2 Manual SP26086
HH:MM: Indicación de un reloj de 24 horas.
MM-DD: Fecha (MM-DD).
Engine (motor): El estado de la función control del motor.
RPM: Velocidad del motor.
Battery Volts (voltios de la batería): La tensión de la batería en voltios de
corriente continua.
H2O Temp: Temperatura del agua en grados centígrados (C) o Fahrenheit (F),
en función de las unidades seleccionadas en la configuración.
OIL Press (presión de aceite): Presión de aceite en bares o PSI, en función de
las unidades seleccionadas en la configuración.
Gen Breaker (disyuntor del generador): El estado del disyuntor del generador,
proporcionado por la entrada discreta Gen CB Aux.
Gen (Generador): El estado del generador. Dos signos menos (– –) indican que
el generador no se ajusta a las especificaciones; un signo más indica que el
generador se ajusta a las especificaciones, pero que no se ha declarado estable
(+–); dos signos más (++) indican que el generador se ajusta a las
especificaciones y que se halla estable.
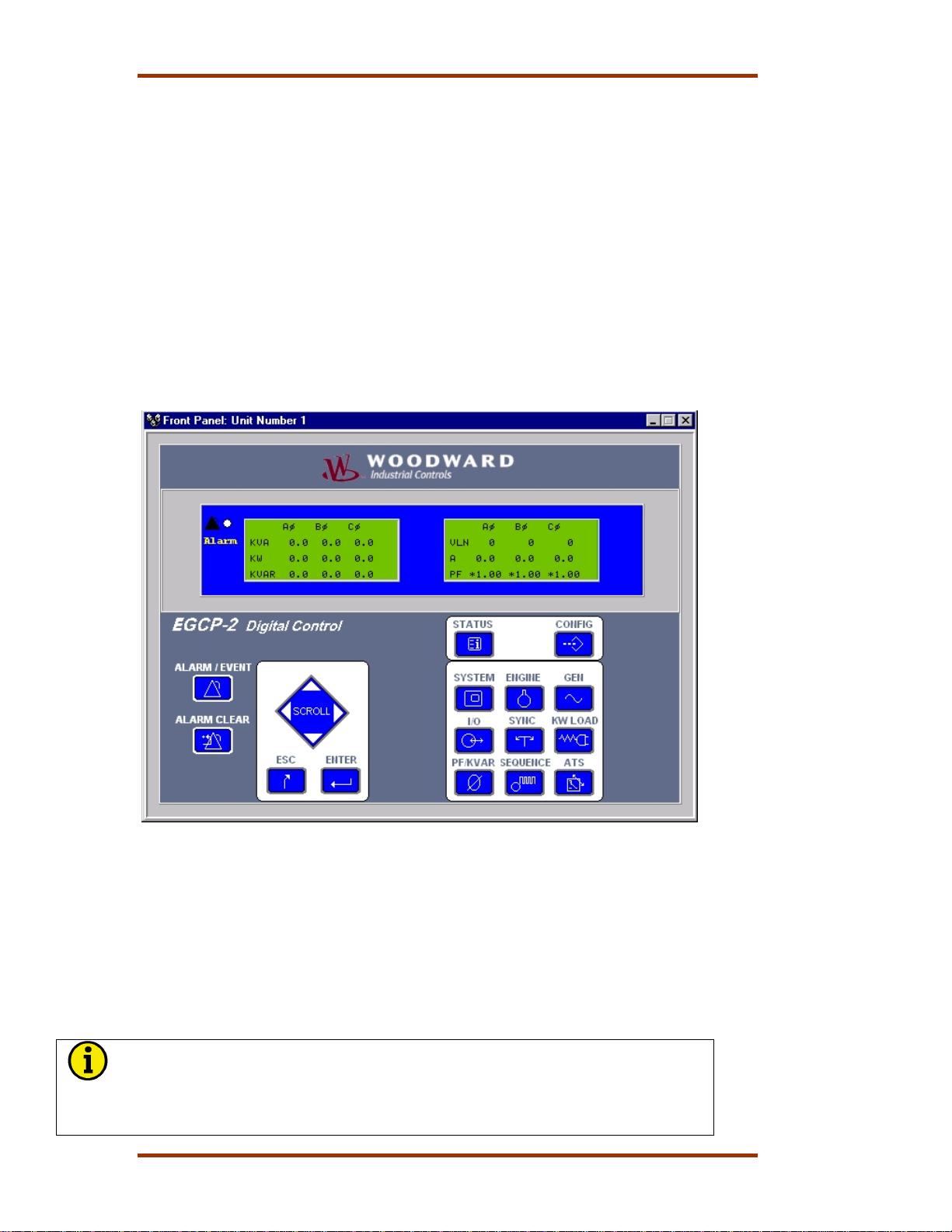
Figura 4-5. Estado del generador (Tensión línea a línea)
A B C: Lectura de las tres fases del generador.
KVA: Lectura de KVA de las tres fases.
KW: Lectura de KW de las tres fases.
KVR: Lectura de KVAR de las tres fases.
V: Voltios de cada fase del generador.
A: Amperios por fase del generador.
PF: Factor de potencia de cada fase del generador.
NOTA
El indicativo de tensión del generador (VLL o VLN) cambia automáticamente
en función del valor establecido en la configuración de la entrada de
tensión. Para más detalles, consulte la sección de los menús de
configuración de este manual.
20 Woodward
Page 27
Manual SP26086 Conjunto de control de generador y motor EGCP-2
NOTA
Las lecturas y los indicativos de la tensión del generador pasan
automáticamente de “V” (voltios) a “KV” (kilovoltios) cuando la tensión
sobrepasa 9999 V en esa entrada.
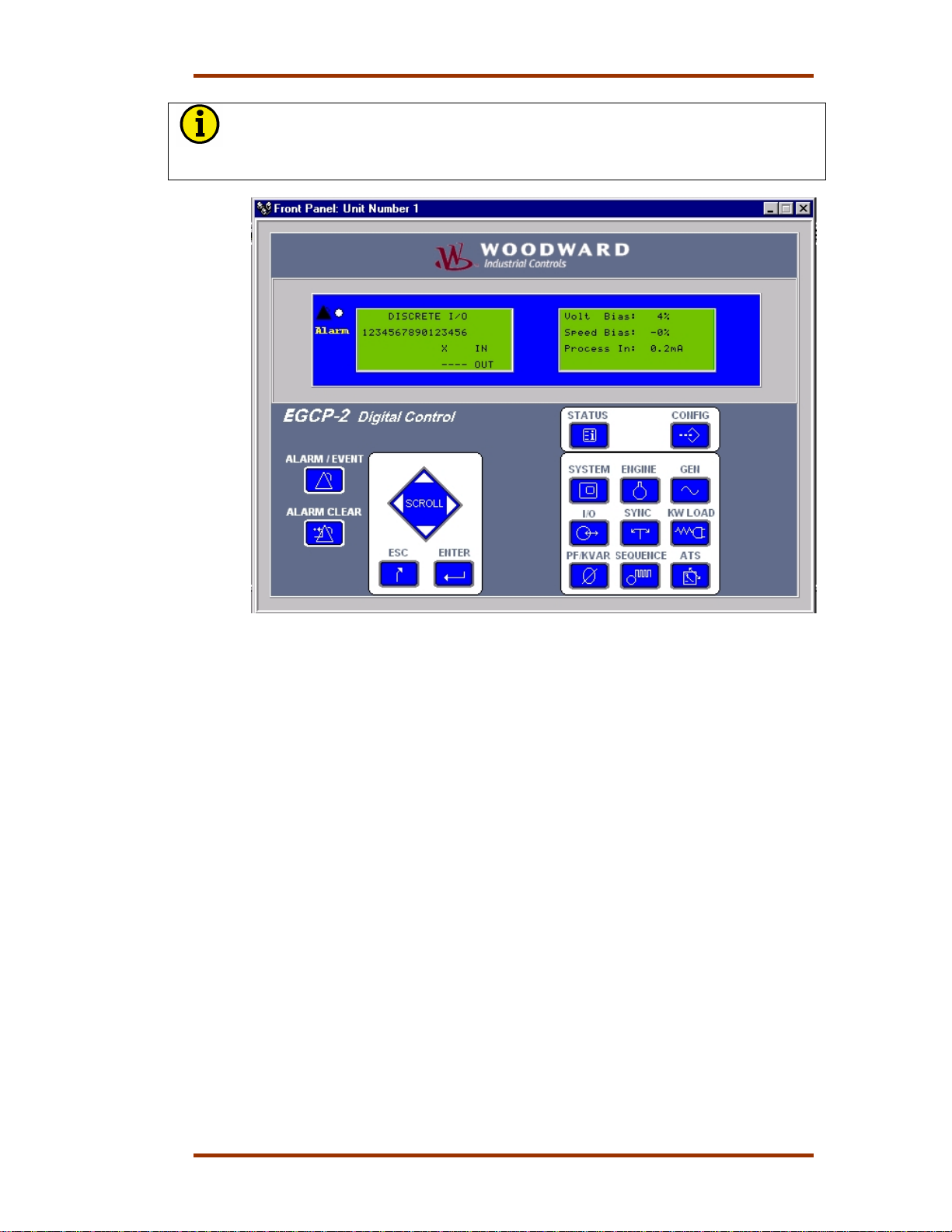
Figura 4-6. Estado de E/S
DI: Entradas discretas 1 a 16.
DO: Salidas discretas 1 a 12.
Volt Bias (polarización de tensión): % de salida de polarización de tensión
(intervalo ±100%).
Speed Bias (polarización de velocidad): % de salida de polarización de
velocidad (intervalo ±100%).
Process In (entrada de proceso): Entrada de proceso en miliamperios (mA).
Entradas discretas
1. Conmutador automático
2. Conmutador de prueba
3. Conmutador de funcionamiento con carga
4. Aumentar voltios
5. Disminuir voltios
6. Aumentar velocidad
7. Disminuir velocidad
8. Contacto auxiliar del disyuntor del generador
9. Contacto auxiliar del disyuntor de la red
10. Conmutador de proceso
11-16. Entradas de alarma/parada remota
Woodward 21
Page 28
Conjunto de control de generador y motor EGCP-2 Manual SP26086
Salidas discretas
1. Cierre de disyuntor/cierre de contactor de la red
2. Cierre de disyuntor/contactor del generador
3. Precalentamiento del motor
4. Solenoide del combustible
5. Virado del motor
6. Relé de alarma visual
7. Conexión del PT de bus local
8. Desconexión PT red
9. Disparo del disyuntor de la red
10. Disparo del disyuntor del generador
11. Alarma acústica
12. Conmutador de carga en KVA o vacío/nominal, en función de la
configuración
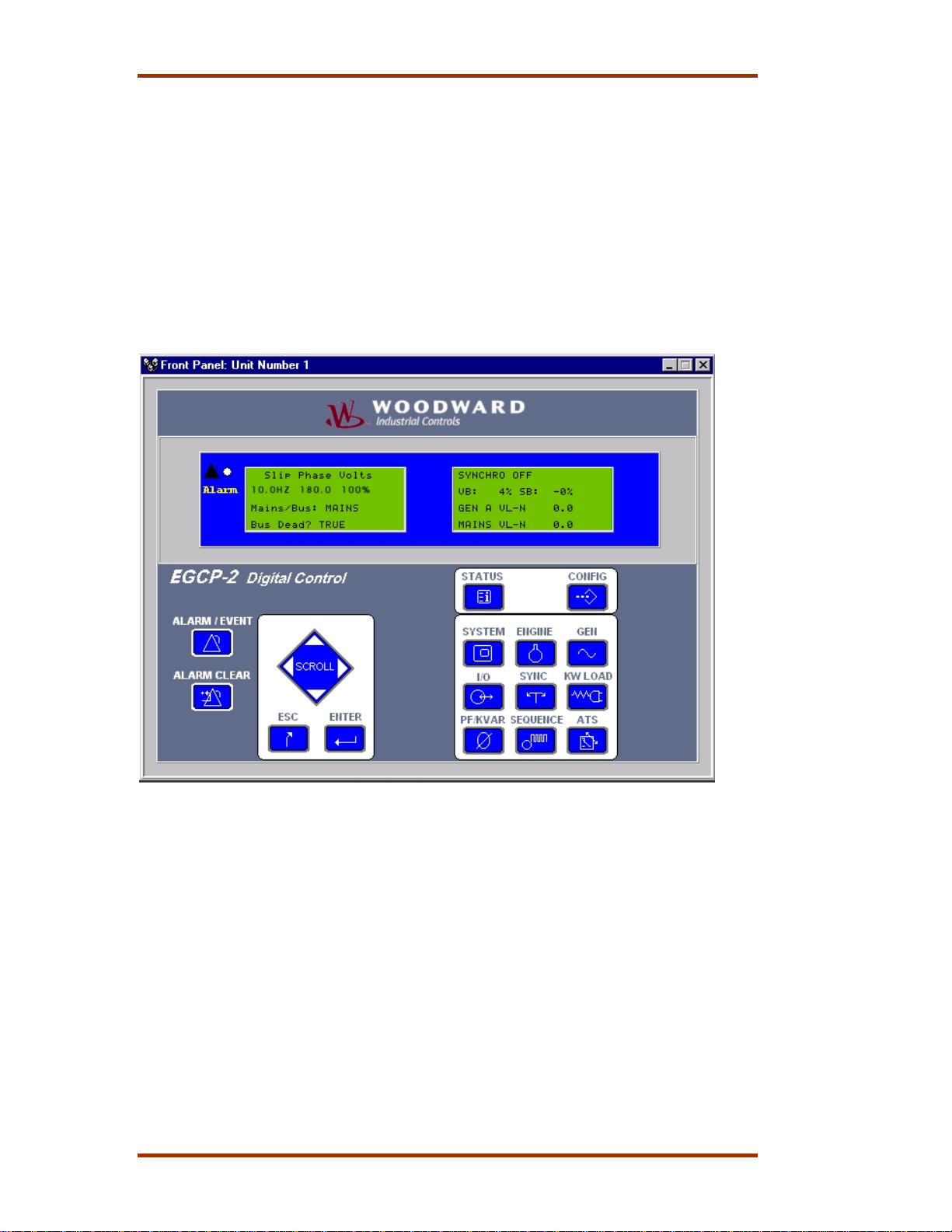
Figura 4-7. Estado del sincronizador
Slip (desplazamiento): La frecuencia de desplazamiento en Hz del generador
con relación al bus o a la red con los que se está poniendo en paralelo.
Phase (fase): La diferencia de ángulo de fase en grados entre el generador y el
bus o la red con los que se está poniendo en paralelo.
Volts (voltios): El porcentaje del diferencial de tensión entre el generador y el
bus o la red con los que se está poniendo en paralelo.
Mains/Bus (red/bus): La entrada de PT activa que el EGCP-2 está
monitorizando.
Dead Bus (bus inactivo): Indica si la entrada de PT (red o bus) en la que se
está midiendo está inactiva.
Synchronizer Status (estado del sincronizador): Indica el estado del
sincronizador. Las opciones son las siguientes:
Cerrar disyuntor del generador
Abrir disyuntor del generador
Cerrar disyuntor de red
22 Woodward
Page 29
Manual SP26086 Conjunto de control de generador y motor EGCP-2
Abrir disyuntor de red
Temporizador del sincronizador
VB: Salida de polarización de tensión (%)
SB: Salida de polarización de velocidad (%)
GEN A: Tensión del generador.
MAINS (red): Tensión de la entrada de PT activa que el sincronizador está
detectando.
NOTA
El indicativo de tensión del generador y de la red (VLL o VLN) cambian
automáticamente en función del valor establecido en la configuración de la
entrada de tensión. Para más detalles, consulte la sección de los menús de
configuración de este manual.
NOTA
Las lecturas y las etiquetas de la tensión del generador y de la red pasan
automáticamente de “V” (voltios) a “KV” (kilovoltios) cuando la tensión
sobrepasa 9999 V en esa entrada.
NOTA
El sincronizador indica **** en el espacio de Slip (Desplazamiento), Phase
(Fase) y Volts (Voltios) cuando el sincronizador está inactivo o
desconectado.
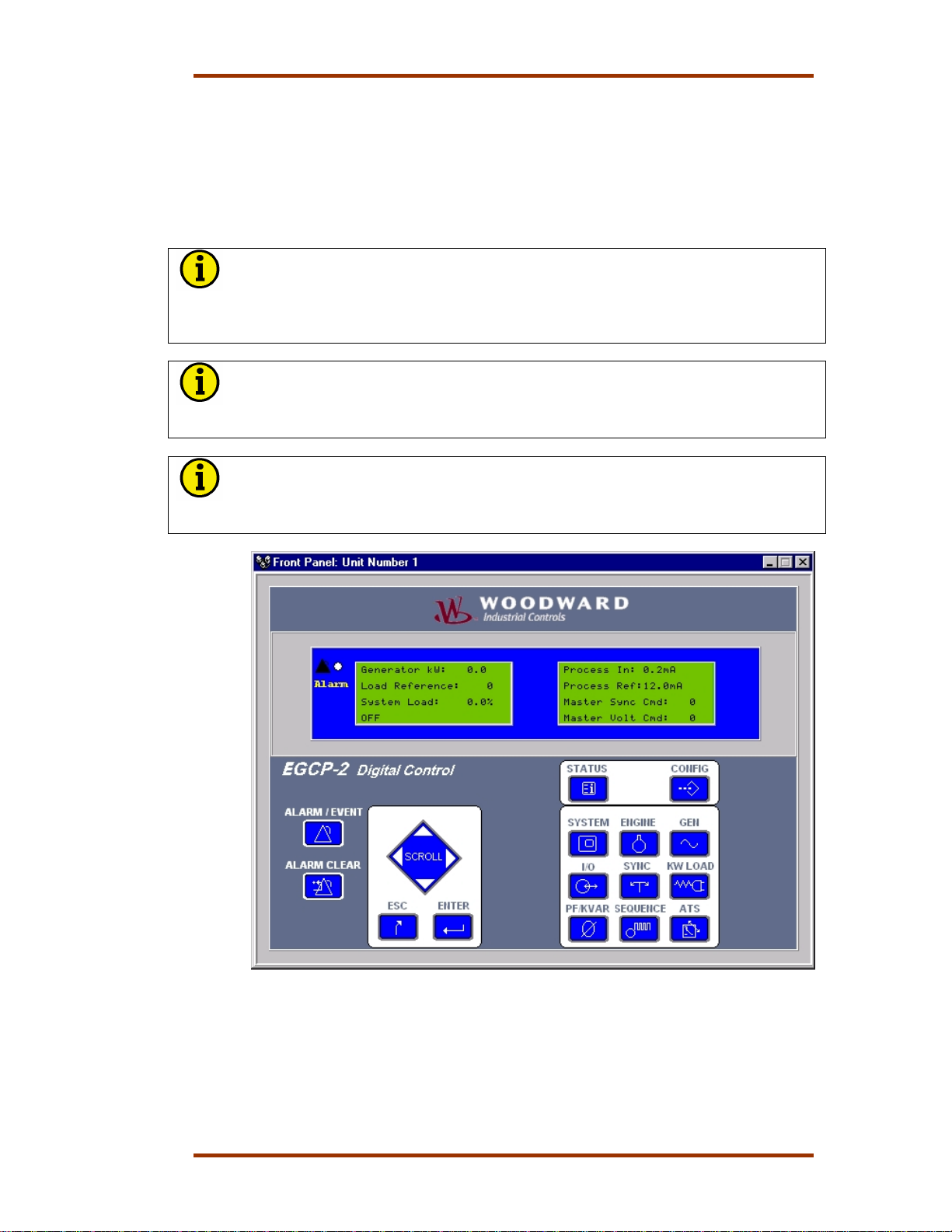
Figura 4-8. Estado de carga en KW
Generator KW (KW del generador): La suma de los KW del generador
trifásico.
Load Reference (referencia de carga): La referencia de carga del generador,
en KW.
Woodward 23
Page 30
Conjunto de control de generador y motor EGCP-2 Manual SP26086
System Load (carga del sistema):El cálculo de la carga del sistema
correspondiente a todas las unidades que operan en modo de compartimiento
isócrono de carga. Esta lectura sólo está activa en unidades que comparten la
carga.
Control: El modo de control de carga que se encuentra activo en ese momento.
Process In (entrada de proceso): El valor detectado de la entrada de proceso
de 4–20 mA o 1–5 VCC.
NOTA
La lectura de la entrada de proceso siempre se presenta en mA. Si se utiliza
una entrada de tensión, la lectura de Process In (Entrada de Proceso)
multiplicada por 243 transforma directamente la lectura de mA en la tensión
en esa entrada.
Process Ref (ref. de proceso): La referencia del control de proceso.
Master Sync Cmd (comando sincronizar maestra): El comando de
sincronización y polarización del control de carga de la unidad maestra (%).
Master Volt Cmd (comando tensión maestra): El comando de polarización de
tensión de la unidad maestra (%).
NOTA
Los comandos de sincronización de la unidad maestra y tensión de la
unidad maestra sólo están activos en unidades en AUTO pertenecientes a
sistemas de unidades múltiples.
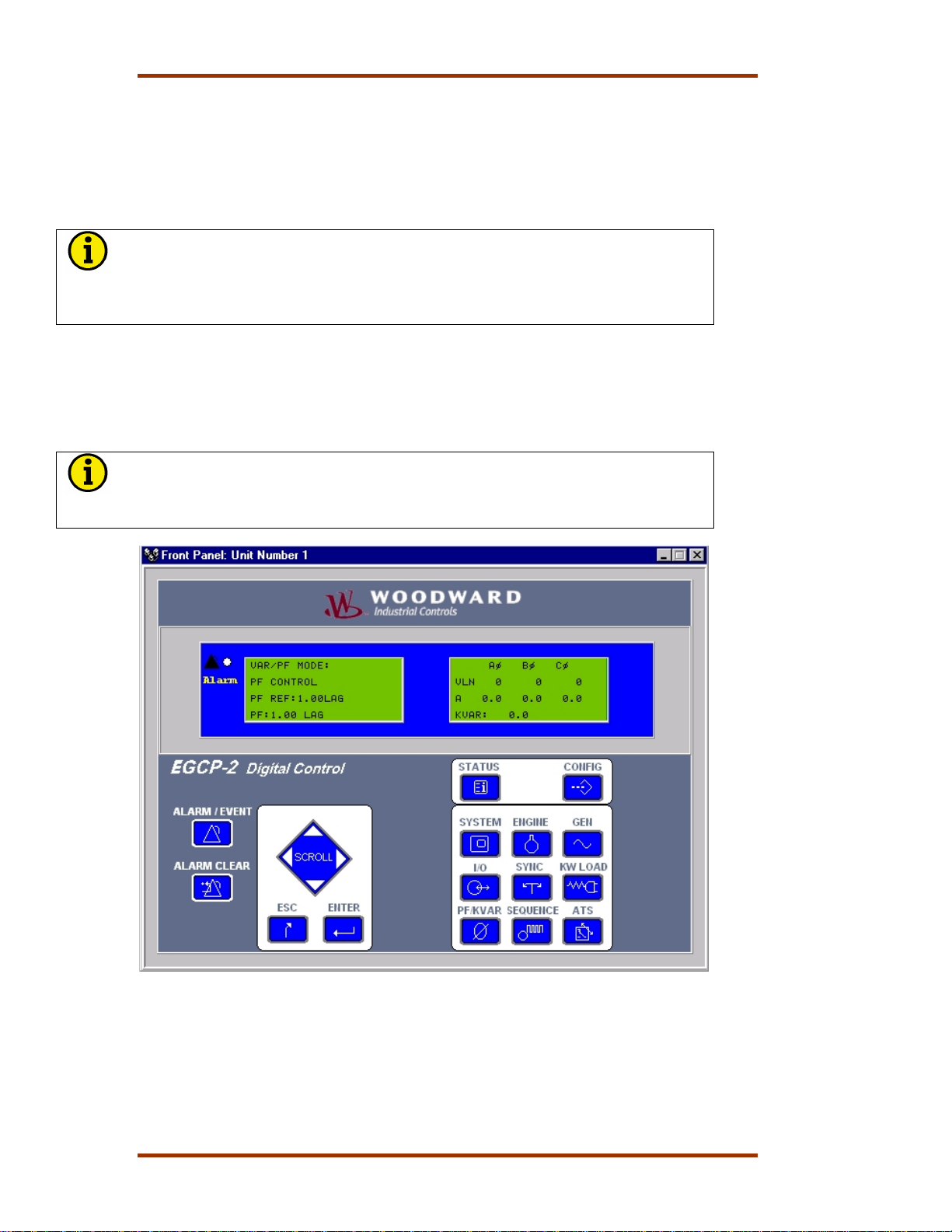
Figura 4-9. Estado de PF/KVAR
VAR/PF MODE: El modo establecido en el control de VAR/PF.
PF REFERENCE (referencia del PF): El valor de referencia del control de PF
del control.
24 Woodward
Page 31

Manual SP26086 Conjunto de control de generador y motor EGCP-2
NOTA
En control VAR la referencia del factor de potencia cambia a KVAR REF.
PF: El factor medio de potencia trifásica del generador.
A B C: Lectura de las tres fases A, B y C del generador.
V: Lectura de la tensión de las tres fases del generador.
A: Lectura de la corriente de las tres fases del generador.
KVAR: Lectura del total de KVAR del generador.
Figura 4-10. Menú Sequencing (Secuencia)
Unit (unidad): Dirección de red operativa de todas las unidades en Auto
pertenecientes a la red.
Oper: Unidades en Auto y de la red operativa que tienen sus disyuntores
cerrados y en carga.
Prty (prioridad): Prioridad de la red operativa de todas las unidades en Auto
pertenecientes a la red.
Master Unit (unidad maestra): La unidad con la prioridad más alta (número de
prioridad más bajo) que está en la red operativa y en Auto.
Next On (siguiente activa): Dirección de red de la siguiente unidad en ponerse
en secuencia en la red operativa.
Next Off (siguiente inactiva): Dirección de red de la siguiente unidad en
ponerse en secuencia fuera de la red operativa.
Total On Load (total en carga): Número total de unidades que comparten
carga y que operan en compartimiento isócrono de carga.
Gen Breaker (disyuntor del generador): El estado del disyuntor del generador,
proporcionado por la entrada discreta Gen CB Aux.
El ejemplo que figura a continuación es una pantalla típica de secuencia
correspondiente a un sistema de 5 unidades.
Woodward 25
Page 32

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Figura 4-11. Menú Sequencing (Unidades múltiples)
Tal como se ve en la pantalla Sequencing:
Units (las unidades) 3 y 5 están en carga con sus disyuntores de generador
cerrados.
Next On es la unidad número 2, cuya prioridad de red operativa es 4.
Next Off es la unidad número 5, cuya prioridad de red operativa es 3.
Master Unit en este sistema es la unidad que tiene la prioridad más alta, que es
la unidad número uno.
NOTA
El estado de la secuencia se muestra cuando la unidad está en Auto y
configurada para unidades múltiples.
NOTA
Las unidades que tienen paradas activas se autorretiran del menú de
secuencia hasta que se borra la condición o las condiciones que
provocaron la parada.
26 Woodward
Page 33

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Figura 4-12. Estado de ATS (conmutador de transferencia automática)
Mains (red eléctrica): Una representación gráfica de la situación de la red
eléctrica. Dos signos menos (– –) indican que la red no se ajusta a las
especificaciones; un signo más indica que la red se ajusta a las
especificaciones, pero que no se ha declarado estable (+–); dos signos más (++)
indican que la red eléctrica se ajusta a las especificaciones y que se halla
estable.
Gen (Generador): Una representación gráfica de la situación del generador.
Dos signos menos (– –) indican que el generador no se ajusta a las
especificaciones; un signo más indica que el generador se ajusta a las
especificaciones, pero que no se ha declarado estable (+–); dos signos más (++)
indican que el generador se ajusta a las especificaciones y que se halla estable.
Mains Breaker (disyuntor de la red eléctrica): El estado del disyuntor de la
red, proporcionado por la entrada Manis CB aux.
Gen Breaker (disyuntor del generador): El estado del disyuntor del generador,
proporcionado por la entrada discreta Gen CB Aux.
Synch (sincronizador): El modo de control del sincronizador.
Mains/Bus (red/bus): La entrada de PT detectada por la entrada de PT de
red/bus por medio de la lógica de la salida discreta de desconexión de redconexión de bus.
Bus Dead (bus inactivo): Indicación de bus local activo o inactivo, dictada por
la tensión del bus y por el estado de las entradas de disyuntor del generador y
de la red.
Master Sync Cmd (comando sincronizar maestra): El comando de
sincronización y polarización del control de carga de la unidad maestra (%).
Master Volt Cmd (comando tensión maestra): El comando de polarización de
tensión de la unidad maestra (%).
NOTA
Los comandos de sincronización de la unidad maestra y tensión de la
unidad maestra sólo están activos en unidades en AUTO pertenecientes a
Woodward 27
sistemas de unidades múltiples.
Page 34

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Registro de alarmas/eventos
El botón Alarm / Event (alarma / evento) permite acceder al registro de alarmas y
eventos (Alarm and Event Log) del EGCP-2. Este registro contiene hasta ocho
elementos de advertencia, alarma o parada. Cuando en el teclado del EGCP-2
se pulsa el botón Alarm / Event, en la pantalla LCD derecha aparece el registro
de alarmas/eventos. Este registro muestra la información siguiente. Para
desplazarse por el registro de alarmas / eventos, véase la sección de
desplazamiento por los menús de este manual.
Figura 4-13. Pantalla de alarmas y eventos
ALARM NAME (nombre de la alarma): El nombre indicado por el evento
concreto de advertencia, alarma o parada.
HH:MM La hora y el minuto en que se produjo la alarma.
MM-DD El Mes y Día en que se produjo la alarma.
#### El valor de la entrada en el momento en que se produjo la alarma. Este
valor sólo es visible con una contraseña de nivel de supervisor o superior.
En caso de que se pulse la tecla Alarm/Event, y no haya alarmas activas ni
registradas, la pantalla presenta un aspecto como éste:
28 Woodward
Page 35

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Figura 4-14. Registro de eventos vacío
Las alarmas que figuran en el registro de alarmas / eventos están dispuestas
siguiendo el orden FILO (First In, Last Out – primera en entrar, última en salir).
Las alarmas más recientes figuran al principio de la lista, seguidas de alarmas
con mayor antigüedad. En caso de que el número total de alarmas registradas y
confirmadas sea superior a dieciséis, las alarmas más antiguas se eliminan para
hacer sitio a las más recientes.
Menús de configuración
Cuando en el teclado del EGCP-2 se pulsa la tecla Config, en la pantalla LCD
derecha aparecen los menús de configuración. El primer elemento de este menú
es Security Code (código de seguridad). El valor de Security Code determina los
menús de configuración a los que se accede. El Security Code se usa también
para establecer el nivel de acceso que requiere el registro de alarmas/eventos.
Woodward 29
Page 36

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Figura 4-15. Pantalla de código de seguridad
Cuando se introduce un código de seguridad válido, aparece la lista del menú
Configuration (Configuración). La lista de configuración permite al usuario
configurar, calibrar y ajustar todos los elementos referidos al funcionamiento del
EGCP-2.
Figura 4-16a. Lista del menú Configuration (pantalla 1)
30 Woodward
Page 37

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Figura 4-16b. Lista del menú Configuration (pantalla 2)
Figura 4-16c. Lista del menú Configuration (pantalla 3)
NOTA
Para información sobre el código de seguridad y el nivel de acceso, véase el
manual 26108 (que se incluye junto con el control).
Woodward 31
Page 38

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Con los diversos códigos de seguridad se accede a partes distintas de las
pantallas de configuración, en función del nivel del código de seguridad que se
utilice. Las teclas arriba y abajo se emplean para desplazar el cursor intermitente
hasta el menú de ajuste en el que el usuario desea entrar. Al pulsar la tecla
Enter se entra en ese menú de configuración. Para más información sobre el
desplazamiento por los menús de configuración, consulte la sección
Desplazamiento por los menús de este manual.
Elementos del menú Configuration (Configuración)
Código de seguridad necesario para el acceso
Para acceder a los menús de configuración es imprescindible un código de
seguridad de cuatro dígitos. Si se introduce un código incorrecto o no se
introduce un código válido en un plazo de 60 segundos, aparece por defecto la
pantalla de estado del sistema.
Código de seguridad
Niveles de acceso
• Monitor (no precisa código de seguridad)
Acceso a todas las pantallas de estado y a la pantalla del registro de
alarmas / eventos, así como posibilidad de borrar una alarma acústica.
• Operator (Operador)
Acceso al registro de alarmas y a la prioridad de red operativa (confirmar y
consignar), así como a todos los elementos que permita el código de
seguridad Monitor.
• Supervisor
Permite acceder a la dirección de red operativa y al ajuste horario, así como
a todos los elementos que permita el código de seguridad Operator
(Operador).
• Technician (Técnico)
Permite acceder a todos los puntos de consigna salvo a tiempo de
funcionamiento y a calibración del motor. Y a todos los elementos a los que
permita acceder el código de seguridad Supervisor.
• Factory (Fábrica)
Permite acceder a los valores de tiempo de funcionamiento y de calibración
del motor (Acceso total).
Comprobaciones de idoneidad
A fin de evitar una configuración incorrecta que pueda dañar el grupo
electrógeno al ponerlo en marcha, el EGCP-2 efectúa una serie de
“comprobaciones de idoneidad”. Los elementos implicados en estas
“comprobaciones de idoneidad”, pertenecientes todos al menú Configuration,
son:
1. Numbers of Poles (Números de polos)
2. Number of Teeth (Número de dientes)
3. System Frequency (Frecuencia del sistema)
4. Rated Speed (Velocidad nominal)
5. Rated KW (KW nominales)
6. Rated KVA (KVA nominales)
7. Rated KVAR (KVAR nominales)
8. CT Ratio (Coeficiente de CT)
9. PT Ratio (Coeficiente de PT)
10. Voltage Input (Entrada de tensión)
11. Voltage Ref (Referencia de tensión)
32 Woodward
Page 39

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Las “comprobaciones de idoneidad” se efectúan cuando, estando en cualquier
menú Configuration, se pulsa la tecla ENTER. Por consiguiente, a medida que
se entra en los elementos del menú Configuration, se efectúan las
comprobaciones de idoneidad.
• Los elementos del menú Configuration
que no superan las
“comprobaciones de idoneidad” se indican con el símbolo #. El símbolo #
aparece en la pantalla de visualización en el extremo derecho del valor de
los elementos. Si algún elemento presenta un símbolo #, al motor no se le
permite arrancar y se hace caso omiso de todas las situaciones de alarma y
parada. Estos elementos deben modificarse hasta que queden dentro de
los valores calculados (comprobaciones de idoneidad) para posibilitar
operaciones del motor, de alarma y de parada.
• Para que se permita funcionar al motor, todos los elementos del menú
Configuration deberán estar consignados (Committed). Los elementos no
consignados presentarán un asterisco (*) junto a su valor en la pantalla de
visualización. Normalmente esta operación se efectúa en la fábrica. Figuran
asteriscos siempre que un archivo de puntos de consigna se transfiere a un
EGCP-2. Para consignar un elemento se debe entrar (ENTER) en él. Abra
el menú Configuration y abra cada elemento; acto seguido, entre (ENTER)
en el citado elemento. El asterisco habrá desaparecido.
Las “comprobaciones de idoneidad” son:
1. Calcular MPU frequency = Rated Speed * Number of Teeth / System
Frequency
• Respuesta: 500 ≤ MPU frequency calculada ≤ 8000 = Unidad correcta
2. Calcular System Frequency = Rated Speed * Number of Poles / 120
• Respuesta: debe ser igual al valor establecido en System Frequency,
50 o 60 Hz
3. Calcular Power Factor = Rated KW / Rated KVA
• Respuesta: 0.7 ≤ Power Factor calculado ≤ 1 = Unidad correcta
4. Calcular CT Ratio, entrada de tensión en triángulo
• KVA * 1000 / Voltage Ref * 1,73
• Respuesta: Si el valor es ≤ CT Ratio = Unidad correcta
5. Calcular CT Ratio, entrada de tensión en estrella
• KVA * 1000 / Voltage Ref * 3
• Respuesta: Si el valor es ≤ CT Ratio = Unidad correcta
6. Calcular Voltage = Voltage Ref / PT Ratio
• Respuesta: Si Voltage calculada ≤ 500 = Unidad correcta
7. Calcular Rated KVA, entrada de tensión en triángulo
• Respuesta: KVA calculados ≤ (Voltage Ref * 1,73) * CT Ratio = Unidad
correcta
8. Rated KVA calculados, entrada de tensión en estrella
• Respuesta: KVA calculados ≤ (Voltage Ref * 3) * CT Ratio = Unidad
correcta
9. Rated KW ≤ Rated KVA
10. Rated KVAR ≤ Rated KVA
Si el EGCP-2 no está suministrando una señal de arranque del motor:
• Busque símbolos # y/o asteriscos (*).
• Ningún elemento abierto únicamente
en el menú Configuration guarda
relación con los demás menús; no se realizará ningún proceso de arranque
en tanto no se cierre este elemento pulsando las teclas ENTER o ESC.
Ejemplo – Si en la pantalla se ve “Rated KW”, no se suministra
ninguna señal de arranque.
Network Address (Dirección de red operativa) (1 a 8)
• Dirección única correspondiente a cada unidad del sistema.
• Un máximo de 8 unidades en red operativa.
Woodward 33
Page 40

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Network Priority (Prioridad de red operativa) (1 a 8)
• Prioridad única correspondiente a cada unidad del sistema.
• La prioridad activa más baja se considera la maestra.
• Un máximo de 8 unidades en red operativa.
• Primero se coloca la prioridad más baja hasta llegar, por orden creciente,
hasta la más alta.
• Cuando la prioridad es inferior a 1, el valor cambia a “Set All” (Establecer
todas). Si se pulsa la tecla Commit (Consignar) cuando este valor figura en
la pantalla, ésta cambia y pasa a indicar todas las unidades en Auto de la
red, y su prioridad. La prioridad de red de cualquier unidad puede
cambiarse con las teclas izquierda/derecha y arriba/abajo del control. Una
vez efectuados los cambios, éstos se consignan pulsando dos veces la
tecla Commit. Al pulsar la tecla Escape desde dentro del valor Set All se
restablecen las prioridades anteriores.
Number of Poles (número de polos) (numérico)
• Establece la relación velocidad/frecuencia.
• Se usa en la alarma/parada por desajuste velocidad/frecuencia.
Number of Teeth (número de dientes) (numérico)
• Determina el factor de escala del régimen de rpm.
• Indicaciones/alarmas de velocidad del motor
System Frequency (Frecuencia del sistema) (50/60 Hz)
• Se emplea como base para el análisis de ondas del generador.
• Define la frecuencia típica de funcionamiento del generador.
Rated Speed (Velocidad nominal) (numérico)
• Velocidad síncrona del grupo electrógeno.
• Se emplea en el cálculo de velocidad para averiguar el período de
“muestra” de la entrada de MPU.
Rated KW (KW nominales) (numérico)
• Potencia nominal en KW del generador.
Rated KVA (KVA nominales) (numérico)
• Se emplea para determinar la corriente nominal (I) del generador para el
nivel mínimo de sobrecorriente.
• Ecuación que se usa para determinar la corriente nominal:
Entrada de tensión en triángulo I = KVA x 1000
Voltage Ref x 1,73
Entrada de tensión en estrella I = KVA x 1000
Voltage Ref x 3
Rated KVAR (KVAR nominales) (numérico)
• KVAR nominales de la unidad.
• Normalmente 0,6 x Rated KVA.
34 Woodward
Page 41

Manual SP26086 Conjunto de control de generador y motor EGCP-2
KVA
KVAR
KW
KW/KVA=PF
COS =KW/KVA
KVA^2=KW^2+KVAR^2
KVA= (KW^2 + KVAR^2)
Figura 4-17. Triángulo de Potencia CA
CT Ratio (Coeficiente CT) (numérico: 5)
• Establece el factor de escala para la entrada de CT detectada para el
amperaje percibido en el generador.
• Se emplea para el algoritmo de detección de carga.
• (KVA, KW, KVAR, PF)
• Se emplean para Alarmas/Paradas.
• Sobrecorriente, Límites de KW, Corriente inversa, etc.
PT Ratio (Coeficiente PT) (numérico: 1)
• Establece al factor de escala para la entrada de PT detectada para los
niveles de tensión medidos en el generador.
• Se emplea para el algoritmo de detección de carga.
• (KVA, KW, KVAR, PF)
• Se emplea para adaptación de tensiones.
• Se emplea para detección de la frecuencia del generador.
• Se emplea detección de Alarmas/Paradas.
• Sobretensión y subtensión
• Límites de KW, etc.
Voltage Input (Entrada de tensión) (Estrella L-N, Triángulo L-L)
• Configurada para detección/transformador utilizado entre el generador y el
EGCP-2.
• Define los cálculos que se utilizarán para KW, KVA, KVAR, etc.
• Define el tipo de entrada previsto para los niveles de tensión en los menús
de puntos de consigna.
• Establece la etiqueta que se utilizará en todas las lecturas de estado de la
tensión del generador y de la red.
• Conexión en estrella
• 4 hilos
• Voltios de Línea a Neutro previstos para todos los elementos del menú de
puntos de consigna que requieran valores de tensión.
• Conexión en triángulo
— 3 hilos
— Voltios de Línea a Línea previstos para todos los elementos del menú
de puntos de consigna que requieran valores de tensión.
de generador o transformador
de generador o transformador
Woodward 35
Page 42

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Voltage Reference (Referencia de tensión) (numérico)
• Tensión de servicio del generador que figura en la placa de características
del generador.
— Se emplea para el compartimiento de VAR/PF como referencia en
función de la cual varios generadores comparten carga reactiva. Esto
mantiene la referencia de tensión estando en modo de Compartimiento
de Factor de potencia o en modo de control de KVAR en un bus
aislado.
Display Units (Unidades en pantalla)
• American (Norteamericanas)
Establece las lecturas de temperatura en grados Fahrenheit (F) y la presión
en libras por pulgada cuadrada (PSI).
• Metric (Métricas)
Establece las lecturas de temperatura en grados centígrados (C) y la
presión en bares (BAR).
Set Date (Fijar fecha)
• Fija la fecha que emplea el control en las indicaciones de fecha/hora y en
las pantallas de alarmas/eventos.
Set Time (Fijar hora)
• Fija la hora que emplea el control en las indicaciones de fecha/hora y en las
pantallas de alarmas/eventos.
Start Sequencing (Secuencia de arranque)
• ENABLED (activada) o DISABLED (desactivada) para seleccionar Start
Sequencing Process (Proceso de secuencia de arranque)
— Activado
a. Emplea Preglow time (Tiempo de precalentamiento) y Engine
Crank (Virado del motor).
b. Debe tener MPU para funcionar.
— Desactivado
a. Ni Preglow time (Tiempo de precalentamiento) ni Engine Crank
(Virado del motor)
b. Funciona sin MPU
Relay #12 Function (Función relé nº 12)
• Conmutador de carga por KVA
— Define la salida discreta nº 12 como conmutador de carga en KVA.
— Emplea las opciones de los valores de KVA High y KVA Low del menú
Load Control Configuration (Configuración del control de carga).
• Idle / Rated Switch (Conmutador de Vacío/Nominal)
— Define la salida discreta nº 12 como conmutador de velocidad en
vacío/nominal. Lo normal es utilizar esta salida para enviar
automáticamente al control de velocidad del motor un comando de
(velocidad en) vacío/nominal en el momento del arranque.
— Emplea las opciones Idle Speed (Velocidad en vacío) e Idle Time
(Tiempo en vacío) del menú Engine Control Configuration
(Configuración del control del motor).
36 Woodward
Page 43

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Speed Bias Type (Tipo de polarización de velocidad)
• ±3 VDC (WGC)
— Fija la salida de polarización de velocidad en el rango ±3 VCC. 0 VCC
es salida cero,
— –3 VCC es una salida de polarización de velocidad del –100%,
— +3 VCC es una salida de polarización de velocidad del +100%.
• 0.5 to 4.5 VDC (DDEC) [0,5 a 4,5 VCC]
— Fija la salida de polarización de velocidad en el rango comprendido
entre 0,5 y 4,5 VCC.
— 2,5 VCC es cero,
— 0,5 VCC es una salida de polarización de velocidad del –100%,
— 4,5 VCC es una salida de polarización de velocidad del +80%.
• 500 Hz PWM (adem)
— Fija la salida de polarización de velocidad en el rango de Modulación
de impulsos en duración (PWM) de 500 Hz.
— Ciclo de trabajo 50% = salida de polarización de velocidad 0%,
— Ciclo de trabajo 0% = salida de polarización de velocidad -100%,
— Ciclo de trabajo 100% = salida de polarización de velocidad +100%.
Voltage Bias Type (Tipo de polarización de tensión)
Establece el rango de tensión de la salida de polarización de tensión.
• ±9 VDC Bias (Polarización ±9 VCC)
— 0 VCC = polarización de tensión 0%
— –9 VCC = polarización de tensión -100%
— +9 VCC = polarización de tensión +100%
• ±3 VDC Bias (Polarización ±3 VCC)
— 0 VCC = polarización de tensión 0%
— –3 VCC = polarización de tensión -100%
— +3 VCC = polarización de tensión +100%
• ±1 VDC Bias (Polarización ±1 VCC)
— 0 VCC = polarización de tensión 0%
— –1 VCC = polarización de tensión -100%
— +1 VCC = polarización de tensión +100%
Circuit Breaker Control (Breaker/Contactor) [Control de disyuntor de
circuito (Disyuntor/Contactor)]
• Define la acción del comando de cierre del generador y de la red.
• El disyuntor emite una señal de cierre momentáneo del disyuntor, y aparte
una señal de disparo momentáneo del disyuntor (abierto). En el manual
26076, bajo “Funciones de las salidas de relé”, figura toda la lógica de los
comandos del disyuntor del generador y de la red.
• El contactor emite una señal de cierre continuo del disyuntor a través de la
salida del relé de cierre del disyuntor, DO2 para el generador y DO1 para la
red. En el manual 26076, bajo “Funciones de las salidas de relé”, figura
toda la lógica de los comandos del contactor del generador y de la red.
Woodward 37
Page 44

Conjunto de control de generador y motor EGCP-2 Manual SP26086
EGCP-2
Gen Breaker Close
Gen Breaker
Trip
Gen Breaker Trip will energize
when in "Auto" and "Gen
Stable Delay" is met.
Generator Breaker Configuration Based Logic.
EGCP-2
Gen Breaker Close
Gen Breaker
Trip
+V
9
8
+V
29
30
+V
9
8
29
No Connection.
30
External Wiring
Connections
Generator
Close Coil
Generator
Trip Coil
External Wiring
Connection
Generator
Close/Open Coil
VIS-142a
01-07-11
Breaker
Breaker
Contactor
Generator Contactor Configuration Based Logic.
Figura 4-18. Lógica de disyuntores y lógica de contactores
Operating Mode (Modo de funcionamiento)
• En paralelo a la red o No en paralelo
• Mains Parallel (en paralelo a la red) permite a la unidad sincronizarse con
la red, y también transportar carga estando en paralelo con la red
(transición cerrada).
• No Parallel (no en paralelo) no permite a la unidad funcionar con carga
hasta que se detecta que el disyuntor de la red está abierto (transición
abierta).
• Todas las unidades que funcionan con un sistema de compartimiento de
carga deben configurarse para el mismo parámetro, esto es, Mains Parallel
o No Parallel.
Number of Units (single, multiple) [Número de unidades (sencilla,
múltiples)]
• Establece si la unidad forma o no parte de un sistema de unidades
múltiples.
• Con single unit (unidad sencilla), no hay arranque automático, secuencia
automática ni compartimiento de carga o PF con otras unidades, en ningún
caso. La unidad muestra “single unit no sequencing” (unidad sencilla, sin
secuencia) en la pantalla de secuencia. Los puntos de consigna de Network
Priority y Network Address se eliminan automáticamente del menú de
puntos de consigna de configuración.
38 Woodward
Page 45

Manual SP26086 Conjunto de control de generador y motor EGCP-2
• Con multiple unit (unidades múltiples), existe arranque automático,
secuencia automática y compartimiento de carga y de VAR/PF entre todas
las unidades del sistema múltiple. La unidad muestra información de la
secuencia del sistema en la pantalla de secuencia. Los puntos de consigna
de Network Priority y Network Address se incorporan automáticamente al
menú de puntos de consigna de configuración. La unidad debe estar en
modo Auto para comunicarse a través de la red entre controles (RS-485).
Paradas y alarmas
El menú Shutdowns and Alarms (Paradas y Alarmas) se emplea para configurar
las diversas funciones de seguridad del EGCP-2.
Todo punto de consigna de alarma puede configurarse para:
• Disabled (Desactivado)
• Warning (Advertencia)—Parpadea el LED del control.
• Visual Alarm (Alarma visual)—Parpadea el LED y se excita el relé de
alarma visual.
• Audible Alarm (Alarma acústica)—Parpadea el LED y se excitan los relés
de alarma visual y acústica.
• Soft Shutdown (Parada blanda)—El LED se enciende, los relés de alarma
visual y acústica se excitan, se descarga el software de la unidad, el relé
del Solenoide de combustible (Fuel Solenoid) se desexcita y somete,
cuando corresponde, al ciclo del temporizador de enfriamiento. La unidad
se autorretira del orden de la secuencia automática.
• Hard Shutdown (Parada dura)—Idéntica a la anterior, salvo en que abre
inmediatamente el disyuntor del generador y desexcita el solenoide del
combustible.
Voltage Range Alarm (Alarma de intervalo de tensión)
• Punto de alarma/parada (Alarm/Shutdown) para un exceso de señal de
polarización de tensión del EGCP-2 a AVR.
• Predeterminada para dispararse ante una salida de polarización de tensión
del ±100%.
• Indica que el AVR no está respondiendo a la salida de polarización de
tensión como estaba previsto.
Generator High Voltage Limit (Voltage Bias Cutout)
Rated Generator Voltage
Opegrating
Range
Generator Low Voltage Limit (Voltage Bias Cutout)
Figura 4-19. Alarmas de tensión alta/baja del generador
Woodward 39
Page 46

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Generator Volt High Limit (Límite alta tensión del generador) (numérico)
• Establece el nivel máximo permitido de tensión del generador.
• Si la tensión supera el límite de alta tensión (High Limit), el generador no se
considera estable, y no es apto para cerrar el disyuntor.
Generator Volt Low Limit (Límite baja tensión del generador) (numérico)
• Establece el nivel mínimo permitido de tensión del generador.
• Si la tensión supera el límite de baja tensión (Low Limit), el generador no se
considera estable, y no es apto para cerrar el disyuntor.
• La Polarización de tensión (Voltage Bias) no disminuye mientras la tensión
del generador es inferior al límite de baja tensión.
Generator High/Low Volt Limit Alarm (Alarma Límite alta/baja tensión del
generador)
• Aunque los puntos de consigna de alarma (Alarm Setpoints) de los límites
de alta/baja tensión (High/Low Limits) estén desactivados (Disabled), la
Polarización de tensión (Voltage Bias) no permite los ajustes más allá de
estos límites.
• Lo mismo rige para el sincronizador, que no permite un cierre del disyuntor
del generador si se alcanzan o sobrepasan los límites de alta o baja tensión
durante un período de tiempo superior al Punto de consigna del
temporizador de la tensión del generador (Gen Volt Timer Setpoint).
Voltage Alarm Delay (Retardo de alarma de tensión)
• Establece el tiempo mínimo, en segundos, que se admite antes de activar
una de las dos alarmas de límite de alta/baja tensión del generador
(Generator High/Low Voltage Limit Alarms). Esto posibilita que en el
generador se den sobretensiones o subtensiones transitorias de corta
duración sin que salten las Alarmas de tensión del generador (Generator
Voltage Alarms).
Generator Frequency High Limit (Límite alta frecuencia del generador)
(numérico)
• Establece el nivel máximo permitido de frecuencia del generador.
• Si la frecuencia supera el límite de alta frecuencia (High Limit), el generador
no se considera estable, y no es apto para cerrar el disyuntor.
Generator Volt Low Limit (Límite baja frecuencia del generador) (numérico)
• Establece el nivel mínimo permitido de frecuencia del generador.
• Si la frecuencia supera el límite de baja tensión (Low Limit), el generador no
se considera estable, y no es apto para cerrar el disyuntor.
Generator High Frequency Limit (Speed Bias Cutout)
Synchronous Speed (50/60 Hz)
Opegrating
Range
Generator Low Frequency Limit (Speed Bias Cutout)
Figura 4-20. Sobrefrecuencia/Subfrecuencia del generador
40 Woodward
Page 47

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Generator High/Low Frequency Limit Alarm (Alarma Límite alta/baja
frecuencia del generador)
• Aunque los puntos de consigna de alarma (Alarm Setpoints) de los límites
de alta/baja tensión (High/Low Limits) estén desactivados (Disabled), la
Polarización de velocidad (Voltage Bias) no permite los ajustes más allá de
estos límites.
• Lo mismo rige para el sincronizador, que no permite un cierre del disyuntor
del generador si se alcanzan o sobrepasan los límites de alta o baja
frecuencia.
Speed/Frequency Mismatch Alarm (Alarma por desajuste
velocidad/frecuencia)
• Compara la frecuencia del generador con el régimen de rpm del motor y
dispara la alarma en caso de existir una diferencia.
• Se emplea para indicar pérdida de MPU, o Pérdida de tensión de campo
del generador (Loss of Generator Field Voltage).
Overcurrent Level (Nivel de sobrecorriente) (numérico)
• Configurado para Sobrecorriente de fase (Phase Overcurrent)
— Detección de 3 fases, selecciona la fase que presenta la corriente más
alta
• Emplea la función Inverse Time (Tiempo inverso) como base de la
detección de sobrecorriente
— Esto permite distintos niveles de sobrecorriente en función del tiempo,
AMP•SECONDS
— AMP•SECONDS viene determinado por:
Overcurrent Level (Nivel de sobrecorriente)
Overcurrent Delay (Retardo de sobrecorriente)
• La Overcurrent Detection (Detección de sobrecorriente) comienza cuando
la corriente sobrepasa “Per Phase Rated Current” (Corriente nominal por
fase).
— Per Phase Rated Current viene determinada por los valores del menú
Configuration
Voltage Input (Entrada de tensión) – estrella o triángulo
Rated KVA (KVA nominales)
Voltage Ref (Referencia de tensión)
— Per Phase Rated Current es igual a
Entrada de tensión en estrella: (Rated KVA / Voltage Ref) / 3
Entrada de tensión en triángulo: (Rated KVA / Voltage Ref) / 1.732
Ejemplo 1: Sistema L-L 480 V, Sistema L-N 277 V
Generador 110 KW, PT Ratio 4:1
Entrada de tensión = Triángulo Entrada de tensión = Estrella
Rated KVA (KVA nominales) = 120 Rated KVA (KVA nominales) = 120
Voltage Ref (Ref. de tensión) = 480 V L-L Voltage Ref (Ref. de tensión) = 277 V L-N
per Phase Rated Current = per Phase Rated Current =
(120 000/480)/1.732 = 144 A (120 000/277)/3 = 144 A
Ejemplo 2: Sistema L-L 4160 V, Sistema L-N 2400 V
Generador 2000 KW, PT Ratio 35:1
Entrada de tensión = Triángulo Entrada de tensión = Estrella
Rated KVA (KVA nominales) = 2400 Rated KVA (KVA nominales) = 2400
Voltage Ref (Ref. de tensión) = 4160 V L-L Voltage Ref (Ref. de tens.) = 2400 V L-N
per Phase Rated Current = per Phase Rated Current =
(2 400 000/4160)/1.732 = 333 A (2,400,000/2400)/3 = 333 A
Woodward 41
Page 48

Conjunto de control de generador y motor EGCP-2 Manual SP26086
A
Overcurrent Delay (Retardo de sobrecorriente) (numérico)
• Se usa con el Overcurrent Level (Nivel de sobrecorriente) para establecer la
cantidad de tiempo (AMP•SECONDS) durante la cual cualquier corriente
puede superar la corriente nominal antes de que se reciba una alarma o
una parada.
• La Overcurrent Detection (Detección de sobrecorriente) comienza cuando
la corriente sobrepasa “Per Phase Rated Current” (Corriente nominal por
fase).
• AMP•SECONDS
— (Overcurrent Level [Nivel de sobrecorriente] – Rated Current [Corriente
nominal]) x Overcurrent Delay [Retardo de sobrecorriente]
Si el Overcurrent Level está configurado como <= Rated Current,
Amp•Seconds = 0. Esto provoca una alarma o parada cuando se
alcanza la Rated Current.
— Amp•Seconds aumenta cuando la corriente es igual o mayor que la
Rated Current
— Amp•Seconds se pone a 0 cuando la corriente es menor que la Rated
Current
Ejemplo 1:
Overcurrent Level (Nivel de sobrecorriente) = 160 160 160 A
Rated Current (Corriente nominal) = 144 144 144 A
Overcurrent Delay (Retardo de sobrecorriente) = 1.0 10.0 20.0 s
Overcurrent Time (Tiempo de sobrecorriente) = 16 160 320 A•s
Recurrir a las figuras 4-21, 4-22 y 4-23 le ayudará a establecer los valores
adecuados en Overcurrent Level
Overcurrent Alarm (Alarma de sobrecorriente)
Si Overcurrent Alarm está configurada como DISABLED (desactivada),
Overcurrent Level y Overcurrent Delay no tendrán ninguna incidencia.
Overcurrent Delay (Retardo de sobrecorriente) (numérico)
Configuración
Overcurrent Level (Nivel de sobrecorriente)
= 160 A
Rated Current (Corriente nominal) = 144 A
Overcurrent Delay (Retardo de
sobrecorriente) = 10 s
/s = 160
Figura 4-21. La corriente se sitúa en 160 A, se recibe una Alarma o Parada en
y Overcurrent Delay para cualquier aplicación.
Overcurrent Trip Zone
Current
(per phase)
Rated
160
144
160
Amp
Seconds
0
•
10
Time (seconds)
10 segundos
42 Woodward
Page 49

Manual SP26086 Conjunto de control de generador y motor EGCP-2
A
A
Configuración
Overcurrent Level (Nivel de sobrecorriente)
= 160 A
Rated Current (Corriente nominal) = 144 A
Overcurrent Delay (Retardo de
sobrecorriente) = 10 s
/s = 160
Figura 4-22. La corriente se sitúa en 176 A, se recibe una Alarma o Parada en 5
Configuración
Overcurrent Level (Nivel de sobrecorriente)
= 160 A
Rated Current (Corriente nominal) = 144 A
Overcurrent Delay (Retardo de
sobrecorriente) = 10 s
/s = 160
Figura 4-23. La corriente se sitúa en 152 A, se recibe una Alarma o Parada en
Reverse Power Level (Nivel de inversión de corriente) (numérico)
• Reverse Power Condition (Situación de inversión de corriente) empieza
cuando los KW detectados en el generador adquieren signo negativo. Los
niveles de Reverse Power Trip (Disparo de inversión de corriente)
dependen de la amplitud y duración de la situación de inversión de
corriente.
Reverse Power Delay (Retardo de inversión de corriente) (numérico)]
• Reverse Power (Inversión de corriente) también utiliza una función de
tiempo inverso.
Minimum Reverse Pwr (Inversión de corriente mínima) (numérico)
• Minimum Reverse Power Level (Nivel de inversión de corriente mínimo) que
puede desencadenar una situación de alarma de inversión de corriente. Los
niveles de inversión de corriente inferiores a este punto de consigna no
provocan una situación de alarma de inversión de corriente,
independientemente de su duración. Cuando el nivel de inversión de
corriente sobrepasa este valor, empieza el Retardo de inversión de
corriente (Reverse Power Delay), y el control monitoriza el aumento de la
amplitud de la inversión de corriente.
Current
(per phase)
segundos
Current
(per phase)
20 segundos
176
Overcurrent Trip Zone
160
160
Amp
•
Secs.
144
5 10
0
Time (seconds)
Overcurrent Trip Zone
160
152
144
160 Amp•Seconds
10 20
0
Time (seconds)
Woodward 43
Page 50

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Reverse
KW
+
Power
Delay Start
Time
0
KW
-
Min
Rev
Power
Reverse Power
Reverse Power
Level
Figura 4-24. Inversión de corriente
Loss of Excitation (LOE) (Pérdida de excitación) (numérico)
• Configurado como porcentaje de la carga total en KVAR del generador que
puede aplicarse a la unidad como carga reactiva en bloque. Si el control
detecta cambios en las cargas en KVAR superiores a este valor que se
aplican instantáneamente se dispara la alarma LOE.
• Se usa para indicar pérdida de excitación en campo dirigida al generador.
Remote Faults (Fallos remotos) nº 1 a nº 6
• Cada fallo puede programarse como:
disabled (desactivado)
warning (advertencia)
visual alarm (alarma visual)
audible alarm (alarma acústica)
soft shutdown (parada blanda)
hard shutdown (parada dura)
Remote Faults (Fallos remotos) nº 1 a nº 6:
• Cada alarma tiene un retardo de tiempo programable (0 a 30000
segundos).
• Cada alarma puede configurarse para cualquiera de los niveles estándar de
alarma o parada.
• Los Fallos externos nº 1 y nº 2 no activan el retardo de tiempo hasta que se
agota el período de generador estable.
Control del motor
Preglow Time (Tiempo de precalentamiento)
• Tiempo de precalentamiento que se permite antes del ciclo de virado del
motor.
• Se mantiene durante todo el virado del motor.
• Se reinicializa después de cada intento de virado.
Crank Time (Tiempo de virado)
• Tiempo máximo permitido para el virado del motor.
Crank Cutout (Desconexión de virado)
• Nivel de rpm del motor al que se cancela el comando de virado (crank).
44 Woodward
Page 51

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Crank Delay (Retardo de virado)
• Tiempo entre intentos de virado del motor (Engine Crank Attempts).
Crank Repeats (Repeticiones de virado)
• Número de veces que el EGCP-2 intenta rearrancar el motor. Los intentos
de virado (Cranking attempts) serán igual al valor de Crank Repeats +1.
Crank Fail (Fallo de virado)
• Punto de consigna de alarma (Alarm Setpoint).
• Se activa cuando el Number of Crank Repeats (Número de repeticiones de
virado) se ha agotado.
Idle/Rated Speed (Velocidad en vacío/nominal)
• Si la salida de relé nº 12 está configurada para conmutación Idle/Rated
(Vacío/Nominal), este valor establece la velocidad a la que comienza el
Tiempo en vacío/nominal (Idle/Rated Time).
• El valor debe ser aproximadamente un 10% menos que la velocidad real en
vacío del grupo electrógeno.
Idle/Rated time (Tiempo en vacío/nominal)
• Temporizador que establece el retardo en segundos que el EGCP-2 espera
una vez que se ha sobrepasado el punto de consigna de Velocidad en
vacío/nominal (Idle/Rated Speed). Una vez transcurrido el Idle/Rated Time,
el EGCP-2 excita la salida discreta nº 12 (si la salida de relé nº 12 está
configurada para la función idle/rated).
Cooldown Time (Tiempo de enfriamiento)
• Tiempo que se concede para el enfriamiento una vez que el motor efectúa
un ciclo de parada.
• Para activarse, debe sobrepasar Cooldown Limit (Límite de enfriamiento)
(véase la pantalla siguiente).
Cooldown Limit (Límite de enfriamiento)
• Punto de consigna de KVA que, cuando se sobrepasa, hace que el motor
vaya a un enfriamiento durante un ciclo de parada.
Engine Run Time (Tiempo de funcionamiento del motor)
• Horas de tiempo en funcionamiento del motor
• Incrementos por horas.
• Se conserva en la memoria EE—No se precisa alimentación eléctrica para
mantener el valor anterior. Se actualiza cada 4 horas en funcionamiento, y
cada vez que el motor se para.
MW Hours (MW hora)
• Megavatios-hora del generador
• Incrementos de 0,1 megavatios-hora.
• Se conserva en la memoria EE. Se actualiza cada 4 horas en
funcionamiento, y cada vez que el motor se para.
Overspeed (Sobrevelocidad) (numérico)
• Configurado para el límite de sobrevelocidad del motor.
• Normalmente se configura para Parada dura (Hard Shutdown), en aras de
la seguridad.
• Típicamente se establece un 10% por encima de la velocidad nominal
(Rated Speed) del motor.
Woodward 45
Page 52

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Battery Volt High Limit (Límite alta tensión de la batería) (numérico)
• Tensión CC detectada que se suministra al EGCP-2.
• Puede utilizarse para detectar un circuito de carga defectuoso.
Battery Voltage Low Limit (Límite baja tensión de la batería) (numérico)
• Se usa para detectar una batería gastada/cargador defectuoso.
• Se desactiva automáticamente durante el virado del motor.
High H2O Temperature (Temperatura alta del agua) (numérico)
• Emplea un sensor de temperatura montado en el motor.
• Activo una vez que el generador se considera estable.
• La visualización puede seleccionarse en grados F (American) o grados C
(Metric).
Low H2O Temperature (Temperatura baja del agua) (numérico)
• Útil para detectar un fallo en el calefactor del agua de la envuelta.
Siempre activo.
High Oil Pressure (Presión de aceite alta) (numérico)
• Emplea un sensor de presión montado en el motor.
• Activo cuando el generador se halla estable.
• La visualización puede seleccionarse en PSI (American) o Bar (Metric).
Low Oil Pressure (Presión de aceite baja)
• Se emplea para detectar un fallo en el sistema de aceite lubricante.
• Activo cuando el generador se halla estable.
Sincroscopio
Modo de sincronizador
Permissive (Autorización)
• Actúa como dispositivo de comprobación de sincronización.
• El EGCP-2 no emite comandos de polarización de velocidad o tensión pero,
si las condiciones de la sincronización se ajustan a las especificaciones
(fase y tensión), el control emite un comando de cierre de disyuntor.
Check (Comprobar)
• Se usa para comprobar el sincronizador antes de la puesta en servicio.
• El control EGCP-2 sincroniza activamente el generador emitiendo
comandos de polarización de velocidad y tensión, pero no emite ningún
comando de cierre de disyuntor.
Run (Funcionamiento)
• Modo de funcionamiento normal.
• Sincroniza activamente y emite un comando de cierre de disyuntor.
• El control EGCP-2 DEBE estar en RUN para operar como dispositivo de
cierre de bus sin tensión.
• En sistemas de unidades múltiples, el control EGCP-2 DEBE tener una
entrada AUTO activa para activar el control del disyuntor.
46 Woodward
Page 53

Manual SP26086 Conjunto de control de generador y motor EGCP-2
m anual close
B reaker C lose
52G
au to /m an
swi tch
Figura 4-25. Circuito típico utilizando la función Permissive (Autorización) y
funcionamiento para sincronización automática/manual
Synchronizer Gain (Ganancia de sincronizador)
• Establece la Ganancia (Gain) de la salida de polarización de velocidad del
sincronizador.
Synchronizer Stability (Estabilidad de sincronizador)
• Establece la Estabilidad (Stability) de la salida de polarización de velocidad
del sincronizador.
• Tanto Ganancia (Gain) como Estabilidad (Stability) se emplean para ajustar
la respuesta dinámica del sincronizador.
Gain (Ganancia)
• Multiplicador de ganancia de señal de salida proporcional a error de fase.
Stability (Estabilidad)
• Estabilidad (Integrador dx/dt en segundos por repetición)
Voltage Matching (Adaptación de tensiones) (activado o desactivado)]
• Activa/desactiva la función Voltage Matching (Adaptación de tensiones) del
control EGCP-2.
• Activa Voltage Window Setpoint (Punto de consigna de la ventana de
tensión).
Voltage Window (Ventana Tensión) (numérico)
• Porcentaje global de error que se permite entre generador y bus, o entre
generador y red.
• El control EGCP-2 no emite un cierre de disyuntor si el error es superior a la
ventana de tensión.
Woodward 47
Page 54

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Bus or Mains VoltageGen Voltage High
484.8 VAC
+1%
480 VAC
475.2 VAC
Gen Voltage Low
Figura 4-26. Adaptación de tensiones (Punto de consigna 1%)
Max. Phase Window (Ventana de fase máx.)
• Máxima desviación permitida del ángulo de fase con respecto a la situación
de acoplamiento de fases.
• El control EGCP-2 no emite un cierre de disyuntor si el ángulo de fase entre
generador y bus, o entre generador y red, sobrepasa esta ventana.
-1%
o
-10 +10
Must be within
+/- 10 deg window for
breaker closure
Figura 4-27. Ventana de fase máxima = 10 grados
Dwell Time (Tiempo de parada) (numérico)
• El período de tiempo durante el cual el generador debe estar dentro de la
Ventana de fase máxima (Max. Phase Window) para que el control EGCP-2
emita un cierre de disyuntor.
• Unos tiempos de parada más largos normalmente proporcionan mayor
estabilidad después de que se cierra el disyuntor.
• Unos tiempos de parada más cortos reducen la cantidad de tiempo
necesario para sincronizar la unidad.
48 Woodward
Page 55

Manual SP26086 Conjunto de control de generador y motor EGCP-2
C.B. Hold Time (Tiempo de retención de C.B.)
• Tiempo en segundos que se retiene la salida Breaker/Contactor Close
(Cerrar disyuntor/contactor) antes de emitir el comando de cierre del
disyuntor.
Close Attempts (Intentos de cierre)
• Número de intentos de cierre que se permiten mientras se sincroniza.
• Close Attempts aumenta si el disyuntor no devuelve una señal continua CB
Aux al EGCP-2.
Reclose Delay (Retardo de reconexión)
• Tiempo en segundos antes de que el control EGCP-2 intente volver a
sincronizar tras un intento de cierre fallido.
Synch Reclose Alarm (Alarma de reconexión de sincronización)
• Punto de consigna de alarma si se agota el número de intentos de cierre.
Synchronizer Time Out (Límite de tiempo del sincronizador)
• Establece el tiempo que se permite para la sincronización, en segundos.
• El tiempo empieza a contar cuando se activa el sincronizador.
• Activo con todos los comandos de apertura y cierre de disyuntor de
generador y red del control EGCP-2.
• El valor cero (0) segundos desactiva el límite de tiempo del sincronizador,
se permite un tiempo de sincronización infinito.
Synch Time-out Alarm (Alarma de límite de tiempo del sincronizador)
• Establece el modo de alarma si se sobrepasa el límite de tiempo del
sincronizador. No se permiten acciones de parada.
Dead Bus Closure (Cierre de bus inactivo)
• Activa/Desactiva la función Dead Bus Closing (Cierre de bus inactivo).
• Para ser candidata a un cierre de bus sin tensión, la unidad debe
circunscribirse a los límites de alta/baja tensión y frecuencia.
• Dead Bus Closure utiliza Token Passing Scheme (Esquema de paso de
señal) para garantizar que sólo una unidad de un sistema conectado en red
se cierre en el bus inactivo en todo momento.
• Para que se permita el cierre de bus inactivo entre unidades conectadas en
red, los sistemas de unidades múltiples deben tener entrada de conmutador
Auto.
Control de carga real
Load Control Mode (Modo de control de carga)
• Normal
— Valor estándar de las funciones Control de carga y VAR/PF.
• Soft Transfer (Transferencia blanda)
— Funciones estándar de Control de carga y VAR/PF, pero la unidad
emite un comando de apertura del disyuntor de la red estando en
control de proceso si se alcanza la referencia de proceso, o si está en
carga base y se alcanza la referencia de carga base.
• Droop (Caída)
— Manual Load and Voltage Control (Control manual de carga y tensión)
— Se usa principalmente para la puesta en servicio.
Woodward 49
Page 56

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Load Control Gain (Ganancia de control de carga)
• Establece la respuesta de ganancia del control de carga.
• Activo en operaciones de cambio progresivo de carga y de carga base.
Load Share Gain (Ganancia de compartimiento de carga)
• Establece la respuesta de ganancia del compartimiento de carga
proporcional.
• Activo en operaciones de compartimiento de carga.
Load Stability (Estabilidad de la carga)
• Establece la respuesta de estabilidad del control de carga.
• Activo en operaciones de cambio progresivo de carga y de carga base.
Load Derivative (Diferencial de carga)
• Establece la respuesta de diferencial del control de carga.
• Activo en operaciones de cambio progresivo de carga y de carga base.
Load Control Filter (Filtro de control de carga)
• Se utiliza Low Pass Filter (Filtro de paso bajo) para atenuar transitorios de
frecuencia más alta, en aras de una mayor estabilidad.
• Activo en los modos de control de compartimiento de carga proporcional,
cambio progresivo de carga y carga base.
• Unos valores de filtro más altos tienden a hacer la unidad más sensible a
los transitorios pequeños y rápidos.
• Unos valores de filtro más bajos tienden a hacer la unidad menos sensible
a los transitorios pequeños y rápidos.
Base Load Reference (Referencia de carga base)
• Load Level Generator (Generador de nivel de carga) cambia
progresivamente al operar en carga base (Base Load).
Unload Trip (Disparo de descarga)
• Nivel de carga (Load Level) con el que se emite el comando de apertura del
disyuntor/contactor del generador cuando el control EGCP-2 está poniendo
fuera de carga el grupo electrógeno.
Load Droop (Caída de carga)
• Porcentaje de caída de KW que se utiliza cuando el control EGCP-2 está
funcionando en modo de caída.
Load Time (Tiempo de carga)
• Tiempo en segundos para que el generador se cargue desde el nivel de
disparo de descarga hasta el nivel de carga base. Esta velocidad se aplica
durante la aplicación de toda función de carga automática, incluido cambio
progresivo a compartimiento de carga.
Unload Time (Tiempo de descarga)
• Tiempo en segundos para que el generador se descargue desde el nivel de
carga base hasta el nivel de disparo de descarga. Esta velocidad de cambio
progresivo se aplica durante la aplicación de toda función de descarga
automática, incluido cambio progresivo desde compartimiento de carga.
Raise Load Rate (Aumentar velocidad de carga)
• Velocidad de cambio progresivo de Porcentaje de carga por segundo
(Percent Load per Second) cuando se usa la entrada del contacto de subir
carga durante el funcionamiento con carga base.
50 Woodward
Page 57

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Lower Load Rate (Disminuir velocidad de carga)
• Velocidad de cambio progresivo de Porcentaje por segundo (Percent per
Second) que se emplea cuando está activa la entrada de disminuir carga
durante el funcionamiento del control de carga base.
KW Load High Limit (Límite de carga alta en KW)
• Carga máxima permitida funcionando en los modos de control de Carga
base (Base load) o Proceso (Process).
• Impide la sobrecarga de la unidad.
KW High Limit Alarma (Alarma de límite alto de KW)
• Establece el modo de alarma cuando la unidad se halla en el Límite de
carga alta (High Load Limit) o por encima de él.
• Activo durante todas las operaciones del control de carga.
• La unidad no sobrepasa el punto de consigna del Límite alto (High Limit)
cuando funciona en los modos de control de Carga base (Base Load) o
Proceso (Process).
KW Load Low Limit (Límite de carga baja en KW)
Activo durante todas las operaciones del control de carga.
• Establece el modo de alarma cuando la unidad se halla en el Límite de
carga baja del generador (Gen Low Load Limit) o por debajo de él.
• Carga mínima permitida funcionando en los modos de control de Carga
base (Base load) o Proceso (Process).
• Impide la corriente inversa de la unidad.
KW Low Load Limit Alarm (Alarma de límite de carga baja en KW)
• Establece el modo de alarma cuando la unidad se halla en el Límite de
carga baja (Low Load Limit) o por debajo de él.
• Activo durante todas las operaciones del control de carga.
KVA Switch Low (Conmutador de KVA bajo)
• Establece un nivel que, cuando se sobrepasa, hace que se excite la salida
del relé de KVA. Aplicable únicamente en el caso de unidades que tienen la
función del relé nº 12 configurada para KVA Load Switch (Conmutador de
carga en KVA).
KVA Switch High (Conmutador de KVA alto)
• Establece un nivel que, cuando se sobrepasa, hace que se desexcite la
salida del relé de KVA. Aplicable únicamente en el caso de unidades que
tienen la función del relé nº 12 configurada para KVA Load Switch
(Conmutador de carga en KVA).
Resumen de la acción del conmutador de carga en KVA:
Si la salida del relé 12 está configurada para acción del Conmutador de carga en
KVA (KVA Load Switch):
Si la suma de KVA de las tres fases del generador es mayor que el punto de
consigna de KVA Switch Low, Y menor que el punto de consigna de KVA Switch
High, la salida del relé K12 se excita. Todos los demás niveles de KVA relativos
a los puntos de consigna de KVA Switch High y Low hacen que la salida del relé
K12 se desexcite.
Woodward 51
Page 58

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Control de carga reactiva
VAR/PF Mode (Modo VAR/PF)
• Desactivado
La unidad no comparte PF ni controla PF en ningún caso.
• Control VAR
La unidad comparte PF en modo de compartimiento de carga en un bus
aislado.
La unidad controla KVAR en los modos de control de Carga base (Base
Load) y Proceso (Process).
• PF Control (Control de PF)
La unidad comparte PF en modo de compartimiento de carga en un bus
aislado.
La unidad controla PF en los modos de control de Carga base (Base Load)
y Proceso (Process).
VAR/PF Gain (Ganancia de VAR/PF)
• Controla la respuesta de ganancia (Gain Response) de la unidad en el
modo de control VAR/PF.
• NO activo en el modo de compartimiento de PF.
Voltage Ramp Time (Tiempo de cambio progresivo de tensión)
• Tiempo de cambio progresivo en la salida de polarización de tensión de 0 a
±100%.
• Controla la respuesta de las unidades en los modos de compartimiento de
PF.
• Controla el tiempo de cambio progresivo de tensión durante la
sincronización.
• Controla el tiempo de cambio progresivo de tensión el ajuste manual de
tensión.
VAR/PF Sharing Gain (Ganancia de compartimiento de VAR/PF)
• Controla la respuesta de ganancia (Gain Response) de la unidad en el
modo de compartimiento de VAR/PF.
• No activo en el modo de control de VAR/PF.
VAR/PF Stability (Estabilidad de VAR/PF)
• Controla la respuesta de estabilidad (Stability Response) de la unidad en el
modo de control de VAR/PF.
• NO activo en el modo de compartimiento de PF.
KVAR Reference (Referencia de KVAR)
• Cuando se selecciona el modo de control de KVAR, esto hace referencia a
la cantidad de KVAR que el generador produce mientras se está en los
modos de control de Carga base (Base Load) o Proceso (Process).
• Puede fijarse para generar o absorber niveles de KVAR.
• Niveles de KVAR limitados por la Rated KVAR (KVAR norminales) de la
unidad.
PF Reference (Referencia de PF)
• Nivel de PF que el generador mantiene mientras se está en los modos de
control de Carga base (Base Load) o Proceso (Process).
• Puede fijarse para factor de potencia capacitivo o inductivo.
• Graduado entre 0 (unidad) y –0,5 (capacitivo 0,5) y +0,5 (inductivo 0,5).
52 Woodward
Page 59
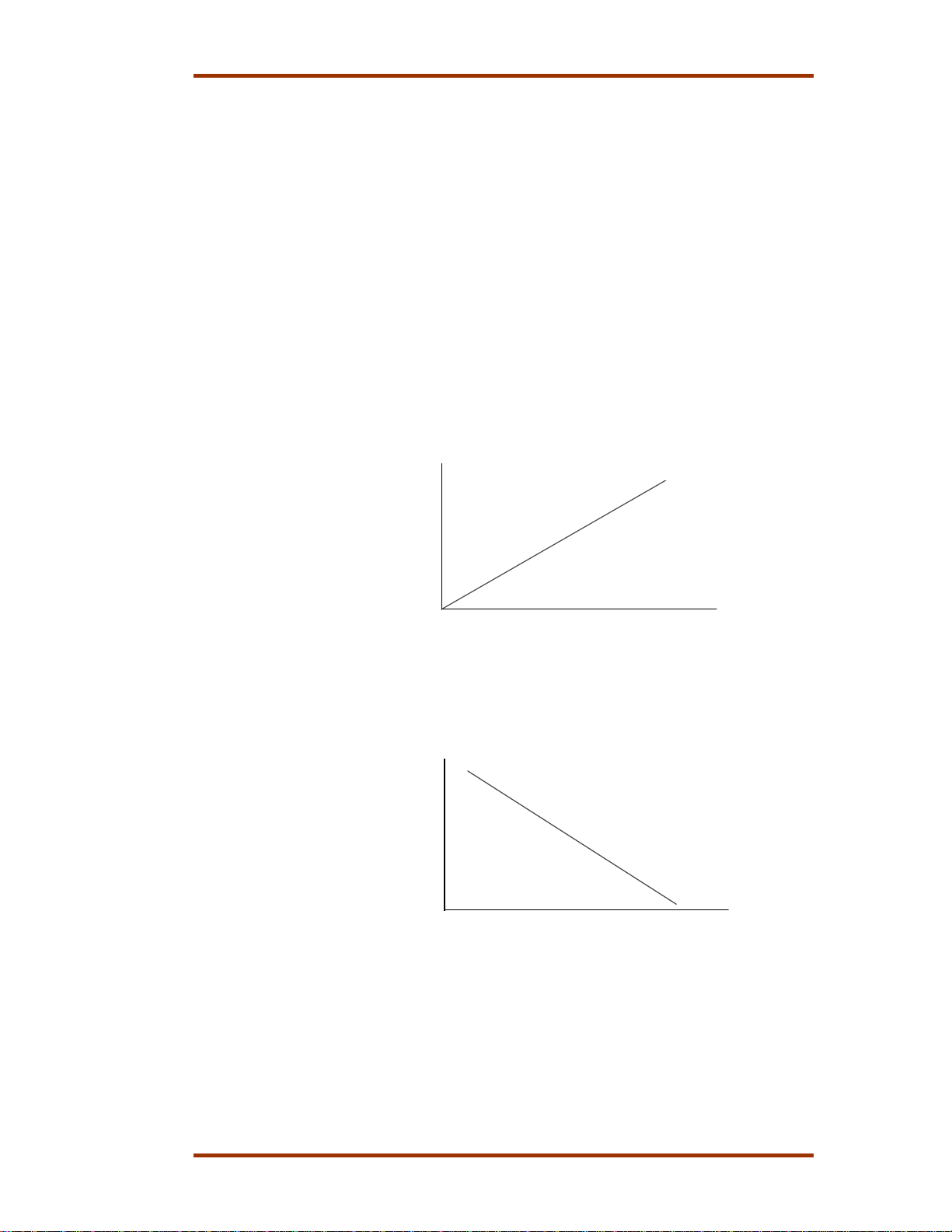
Manual SP26086 Conjunto de control de generador y motor EGCP-2
PF Deadband (Banda muerta de PF)
• ± banda muerta en torno al punto de referencia de PF.
• Configurado en PF.
• Activo en los modos de control de PF y de compartimiento de PF.
• Puede utilizarse para estabilizar, en caso necesario, unidades con carga
baja.
Control de proceso
Process Action (Acción de Proceso) (directa, indirecta)
• Define la acción de polarización de velocidad cuando la unidad opera en
control de proceso en paralelo a la red.
• Acción directa = La unidad aumenta la polarización de velocidad
(combustible) para aumentar la entrada de proceso de 4–20 mA.
• ejemplo: Export Power control (Control de potencia exportada)
• Acción indirecta = La unidad reduce la polarización de velocidad
(combustible) para aumentar la entrada de proceso de 4–20 mA.
• ejemplo: Import Power Control (Control de potencia importada)
100
20 mA
export
power
0
4 mA
Figura 4-28. Acción directa de proceso (Exportar)
speed bias
100
100
20 mA
imported
power
0
4 mA
Figura 4-29. Acción indirecta de proceso (Importar potencia)
speed bias
100
Woodward 53
Page 60

Conjunto de control de generador y motor EGCP-2 Manual SP26086
100
20mA
speed bias ->
0
100%
0
-100
4mA
Figura 4-30. Acción directa de Proceso (Importar/Exportar)
Process Import/Export Hardware (Hardware de importación/exportación de
proceso)
• El control EGCP-2 puede tomar una señal de entrada de 4–20 mA o 1–5
Vcc de un transductor. El condicionamiento de la señal de entrada se
selecciona por medio de un conmutador DIP situado en la parte posterior
del control, posición 4 de conmutador, número de conmutador 4. Al cerrar
este conmutador se selecciona el hardware de la entrada de 4–20 mA. Al
abrir este conmutador se selecciona el hardware de la entrada de 1–5 VCC.
Véase en el diagrama de distribución del EGCP-2 la localización de los
conmutadores de la unidad.
SW - 4
___________________________
1. +5V RS-485
2. 123 ohm RS-485 Termination+
3. 123 ohm RS-485 Termination -
4. 4-20 mA Process Input
Figura 4-31. Conmutador DIP del control EGCP-2
Process Dynamics (Dinámica de proceso)
• La unidad maestra de proceso utiliza PID de proceso para ejercer el control.
• Ganancia), Estabilidad, Diferencial, Filtro, Caída.
• La unidades esclavas de la unidad maestra de proceso utilizan valores de
PID de control de carga para buscar la referencia de carga del sistema de
la unidad maestra.
• Ganancia, estabilidad, diferencial y filtro de carga.
54 Woodward
Dip Switch # 4
1
2
3
4
Page 61

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Process Gain (Ganancia de proceso)
• Establece la respuesta de ganancia del sistema estando en control de
proceso.
• Efectivo únicamente en la unidad maestra activa. Las unidades esclavas
dependen de los valores dinámicos del control de carga (Load Control) para
controlar la respuesta a la referencia de carga de la unidad maestra.
• Debiera fijarse con el número máximo de unidades operando en modo de
control de proceso.
Process Stability (Estabilidad de proceso)
• Establece la respuesta de estabilidad del sistema estando en control de
proceso.
• Efectivo únicamente en la unidad maestra activa. Las unidades esclavas
dependen de los valores dinámicos del control de carga (Load Control) para
controlar la respuesta a la referencia de carga de la unidad maestra.
• Debiera fijarse con el número máximo de unidades operando en modo de
control de proceso.
Process Derivative (Diferencial de proceso)
• Establece la respuesta de diferencial del sistema estando en control de
proceso.
• Efectivo únicamente en la unidad maestra activa. Las unidades esclavas
dependen de los valores dinámicos del control de carga (Load Control) para
controlar la respuesta a la referencia de carga de la unidad maestra.
• Debiera fijarse con el número máximo de unidades operando en modo de
control de proceso.
Process Deadband (Banda muerta de proceso)
• ± banda muerta en torno al punto de referencia de proceso.
• Se usa para añadir estabilidad a un proceso con estabilidad próxima a los
límites aceptables.
Process Droop (Caída de proceso)
• Introduce realimentación negativa en la referencia de proceso a medida que
aumenta la entrada de proceso.
• Se usa para añadir estabilidad a procesos con estabilidad próxima a los
límites aceptables.
Process Filter (Filtro de proceso)
• El Filtro de paso bajo (Low Pass Filter) atenúa transitorios de frecuencia
más alta en la señal de entrada de proceso de 4–20 mA.
• Cuanto más alto sea el valor que se fije para el filtro, tanto más reaccionará
el control de proceso a los transitorios de frecuencia más alta del proceso.
• Cuanto más bajo sea el valor que se fije para el filtro, tanto menos
reaccionará y tanto más estable será el control de proceso a los transitorios
de frecuencia más alta del proceso.
Process Reference (Referencia de proceso)
• El punto de referencia, en mA, con el que la unidad maestra controlará la
entrada de proceso.
• Se emplea también en los modos de Transferencia blanda (Soft Transfer)
para establecer el nivel de proceso al que se producirá la transferencia de
la red al generador.
Raise Rate (Aumentar velocidad)
• Velocidad, en mA/s, a la que cambiará la referencia del proceso cuando el
EGCP-2 reciba una entrada de contacto de aumentar la carga mientras
opera en modo de control de proceso.
Woodward 55
Page 62

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Lower Rate (Disminuir velocidad)
• Velocidad, en mA/s, a la que cambiará la referencia del proceso cuando el
EGCP-2 reciba una entrada de contacto de disminuir la carga mientras
opera en modo de control de proceso.
Process High Limit (Límite alto de proceso)
• Máximo nivel permitido de referencia del proceso. Configurado en mA.
• Efectivo únicamente en la unidad maestra activa.
Process High Limit Alarm (Alarma de límite alto de proceso)
• Establece el modo de alarma cuando se alcanza el límite alto del proceso.
Process Low Limit (Límite bajo de proceso)
• Mínimo nivel permitido de referencia del proceso. Configurado en mA.
• Efectivo únicamente en la unidad maestra activa.
Process Low Limit Alarm (Alarma de límite bajo de proceso)
• Establece el modo de alarma cuando la referencia del proceso alcanza el
límite bajo.
Conmutador de transferencia
Check Mains Breaker (Revisar disyuntor de red) (activado/desactivado)
• Activado, se usa para poner en marcha la comprobación de la entrada
discreta Mains C.B. Aux. (Aux. disyuntor de red).
• Desactivado, la unidad recurre a otras unidades que tienen activado este
punto de consigna para emitir por la red el estado del contacto Mains C.B.
Aux.
• Las unidades que controlan el disyuntor de la red deben tener activado
Check Mains Breaker.
Fast Transfer Delay (Retardo de transferencia rápida)
• Tiempo que requiere una transición al conmutar de operaciones de red a
operaciones de generador, y viceversa. Incluye los tiempos de transición
entre detección de bus y de red.
Mains Stable Delay (Retardo de red estable)
• Período de tiempo que se requiere para declarar estable la red (dentro de
los límites de tensión y frecuencia durante el tiempo establecido) antes de
la transición de generador(es) a red.
Generador Stable Delay (Retardo de generador estable)
• Período de tiempo que se requiere para declarar estable el generador
(dentro de los límites de tensión y frecuencia durante el tiempo establecido)
antes de la transición de red a generador, así como para cierre de bus
inactivo.
Load Surge (Aumento brusco de carga) (% de carga nominal/s)
• Sólo se usa en control de Carga base o Proceso.
(Operaciones en paralelo a la red)
• Se puede configurar para dispararse a un punto de consigna porcentual de
la desviación total de carga del generador por segundo mientras se opera
en Paralelo a la red (Mains Parallel).
• Puede configurarse para Detección de Pérdida de red (Loss of Mains
Detection).
• Disparo instantáneo.
56 Woodward
Page 63

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Load Surge Alarm (Alarma de aumento brusco de carga)
La situación de aumento brusco de la carga desencadena una respuesta
establecida por este punto de consigna. Las respuestas posibles son:
• Desactivado
• Advertencia
• Pérdida de red
• Pérdida de red con alarmas
Mains Volt High Limit (Límite alta tensión de red) (numérico)
• Alerta cuando la Tensión de red (Mains Voltage) sobrepasa el Punto de
consigna de alarma (Alarm Setpoint).
• La alarma puede configurarse para Pérdida de red (Loss of Mains).
• Si la Tensión de red (Mains Voltage) es superior al límite alto (High Limit), la
red no se considera estable, y el control EGCP-2 no emite un comando de
cierre del disyuntor de la red.
Mains Volt High Alms (Alarmas de alta tensión de red)
La situación de Alta tensión de red (Mains Volt High) desencadena una
respuesta establecida por este punto de consigna. Las respuestas posibles son:
• Desactivado
• Advertencia
• Pérdida de red
• Pérdida de red con alarmas
Mains Volt Low Limit (Límite baja tensión de red) (numérico)
• Alerta cuando la Tensión de red (Mains Voltage) desciende por debajo del
punto de consigna.
• La alarma puede configurarse para Pérdida de red (Loss of Mains).
• Si la Tensión de red (Mains Voltage) es inferior al límite bajo (Low Limit), la
red no se considera estable, y el control EGCP-2 no emite un comando de
cierre del disyuntor de la red.
Mains Volt Low Alm (Alarma de baja tensión de red)
La situación de Baja tensión de red (Mains Volt Low) desencadena una
respuesta establecida por este punto de consigna. Las respuestas posibles son:
• Desactivado
• Advertencia
• Pérdida de red
• Pérdida de red con alarmas
Mains Frequency High Limit (Límite alta frecuencia de red) (numérico)
• Alerta cuando la Frecuencia de red (Mains Frequency) sobrepasa el Punto
de consigna de alarma (Alarm Setpoint).
• La alarma puede configurarse para Pérdida de red (Loss of Mains).
• Si la Frecuencia de red (Mains Frequency) es superior al límite alto (High
Limit), la red no se considera estable, y el control EGCP-2 no emite un
comando de cierre del disyuntor de la red.
Mains Freq High Alm (Alarma de alta frecuencia de red)
La situación de Alta frecuencia de red (Mains Frequency High) desencadena
una respuesta establecida por este punto de consigna. Las respuestas posibles
son:
• Desactivado
• Advertencia
• Pérdida de red
• Pérdida de red con alarmas
Woodward 57
Page 64

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Mains Frequency Low Limit (Límite baja frecuencia de red) (numérico)
• Alerta cuando la Frecuencia de red (Mains Frequency) desciende por
debajo del punto de consigna.
• La alarma puede configurarse para Pérdida de red (Loss of Mains).
• Si la Frecuencia de red (Mains Frequency) es inferior al límite bajo (Low
Limit), la red no se considera estable, y el control EGCP-2 no emite un
comando de cierre del disyuntor de la red.
Mains Freq Low Alm (Alarma de baja frecuencia de red)
La situación de Baja frecuencia de red (Mains Frequency Low) desencadena
una respuesta establecida por este punto de consigna. Las respuestas posibles
son:
• Desactivado
• Advertencia
• Pérdida de red
• Pérdida de red con alarmas
LOM Action Delay (Retardo de acción LOM) (numérico en segundos)
• Establece el Retardo de tiempo (Time Delay) para que empiece la acción
por Pérdida de red (LOM Action) una vez que dicha Pérdida de red (Loss of
Mains) se ha detectado.
• Retardo de tiempo desde la detección de la pérdida de red hasta la
apertura del disyuntor de la red y el comando de arranque del motor.
• En aplicaciones en las que el bus de la red eléctrica es algo inestable, este
valor puede utilizarse para evitar que una perturbación momentánea de la
frecuencia o tensión de la red desencadene acciones por pérdida de red
indeseables.
Secuencia y comunicaciones
Automatic Sequencing (Secuencia automática) (activada/desactivada)
• Activa o desactiva la secuencia automática para esa unidad.
• Puede utilizarse, en caso necesario, para desactivar la secuencia de una
determinada unidad perteneciente a un sistema de secuencias.
• Al desactivar en la unidad maestra se desactiva toda la secuencia
automática.
Maximum Generator Load (Carga máxima del generador)
• Porcentaje de carga del sistema en todas las unidades con los disyuntores
de generador cerrados, y pertenecientes a la misma red, en los modos de
control Auto, Load Sharing o Process, con el que la unidad maestra activa
empieza a contar el tiempo para poner en secuencia la siguiente unidad en
línea.
Next Genset Delay (Retardo para siguiente grupo electrógeno)
• Período de tiempo que transcurrirá antes de que la unidad maestra ponga
automáticamente en secuencia otro generador en línea una vez que se ha
sobrepasado y así permanece el punto de consigna de Carga máxima del
generador (Maximum Generator Load).
• El retardo sólo es efectivo en la unidad maestra activa.
58 Woodward
Page 65

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Rated Load Delay (Retardo de carga nominal)
• Retardo cuando la carga del sistema sobrepasa el 100%, antes de que la
unidad maestra ponga en funcionamiento el siguiente grupo electrógeno de
la secuencia.
• Operación de secuencia rápida en caso de situación de sobrecarga.
• La función Rated Load Delay (Retardo de carga nominal) cancela el cambio
progresivo de carga (load ramping) en la unidad puesta en secuencia en
línea. Esa unidad asume inmediatamente su proporción de la carga del
sistema.
Maximum Start Time (Tiempo máximo de arranque)
• Tiempo que la unidad maestra concede hasta ver en situación “activa”, es
decir, arrancada y lista para recibir carga, la siguiente unidad que se va a
poner en secuencia en línea.
• Esto lo determina un indicador de red que indica que la unidad está lista
para recibir carga, y que es transmitido por la red por la unidad que la
unidad maestra pone en secuencia.
• Si la unidad maestra no detecta este indicador dentro del Max. Start Time
permitido, se dirige a la unidad que presenta la siguiente prioridad inferior e
intenta arrancarla, o, si no hay más unidades, reintenta el comando de
arranque en la misma unidad.
Minimum Generator Load (Carga mínima del generador)
• Porcentaje de la carga del sistema ante el cual la unidad maestra activa
empieza a contar el tiempo hasta poner unidades en secuencia fuera de
línea.
• La unidad maestra puede tener que esperar hasta que la carga del sistema
sea inferior a este nivel si la siguiente unidad en línea que se va a poner en
secuencia fuera de línea hace que la carga del sistema aumente hasta
sobrepasar el punto de consigna de Carga máxima del generador (Max
Gen Load) de la unidad maestra.
Reduced Load Delay (Retardo de carga reducida)
• Tiempo en segundos que la unidad maestra activa espera antes de poner
en secuencia unidades fuera de línea.
• El retardo sólo es efectivo en la unidad maestra activa.
• Las unidades que tienen la prioridad más baja son las que primero se
ponen en secuencia fuera de línea.
Maximum Stop Time (Tiempo máximo de parada)
• Tiempo en segundos que permite la unidad maestra para poner en
secuencia fuera de línea una unidad esclava.
• La maestra empieza a poner en secuencia fuera de línea la unidad que
presenta la siguiente prioridad inferior si la carga del sistema sigue siendo
superior al punto de consigna de Carga mínima del generador (Min. Gen.
Load) al final del Límite de tiempo máximo de parada (Max Stop Time
Limit).
422 Protocol (Protocolo 422)
Este valor establece el protocolo que utiliza el puerto RS-422 del EGCP-2. Antes
de decidir el protocolo que va a utilizar, familiarícese primero con los diversos
ajustes posibles, leyendo detenidamente la sección Comunicaciones serie de
este manual. Configurar incorrectamente esta opción puede provocar una
pérdida de las comunicaciones con el EGCP-2 a través del puerto RS-422.
Woodward 59
Page 66

Conjunto de control de generador y motor EGCP-2 Manual SP26086
NOTA
Los cambios efectuados en el punto de consigna de “422 Protocol” no
entran en vigor hasta que la alimentación de entrada se reinicializa y llega al
control.
Servlink
• Establece el protocolo Servlink en las comunicaciones serie RS-422
Modbus
• Establece el protocolo Modbus RTU en las comunicaciones serie RS-422
Upload Setpoints (Cargar puntos de consigna)
• Establece el modo Upload Setpoints en las comunicaciones serie RS-422.
Modbus ID (Identificador Modbus)
• Establece el identificador de red de Modbus RTU que tendrá la unidad. Las
unidades sólo pueden ser unidades Modbus esclavas.
Modbus Timeout (Límite de tiempo Modbus)
• Establece el límite de tiempo de las comunicaciones Modbus. Para más
detalles, consulte la sección Comunicaciones serie de este manual.
Modbus Reset (Reinicializar Modbus)
• Puede utilizarse para reinicializar las indicaciones de error Modbus de la
unidad.
Menú de calibración
Si bien Woodward calibra todas las unidades en la fábrica antes de
despacharlas, por fuerza habrá entradas/salidas afectadas por cableado externo
y/o interfaces (relés, transformadores, etc.) que será necesario calibrar en el
emplazamiento durante la puesta en servicio.
El menú Calibration permite calibrar todas las entradas analógicas del EGCP-2,
así como las salidas de polarización de velocidad y de polarización de tensión.
Todos los puntos del calibración del EGCP-2 se usan para hacer que el valor
real de una entrada, como por ejemplo la tensión del generador, indiquen en la
correspondiente pantalla de visualización del EGCP-2 el valor exacto de la señal
que se está monitorizando.
Para facilitar la calibración de la unidad, todas las opciones del menú de
calibración presentan la entrada detectada que se va a calibrar en las dos líneas
inferiores de la pantalla LCD derecha. Estos valores se actualizan cada 200
milisegundos. Todos los ajustes efectuados en los menús de configuración son
inmediatos en su efecto; es decir, no es necesario introducir los valores en la
memoria para que incidan en la entrada detectada o en el funcionamiento del
control.
Ejemplo: Los 380 Vca medidos entre líneas en la fase A-B del generador deben
figurar como 380 VCA en la sección de la medición de tensión entre líneas del
menú “Generator Status” (Estado del generador) del EGCP-2. El EGCP-2 está
configurado para una entrada de tensión línea a línea.
La opción “PT Phase A Scale” (Escala PT fase A) del menú de calibración
indicará la tensión de fase A-B del generador en las dos líneas inferiores de la
pantalla. Este valor cambiará cuando se ajuste el valor de PT Phase A Scale.
60 Woodward
Page 67

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Process Input Scale (Escala de la entrada de Proceso)
• Señal de entrada real de 4–20 mA o 1–5 Vcc procedente de un transductor
externo.
• Monitorice la lectura Pin (entrada de proceso) del menú Load Control
Monitor (Monitor de control de carga).
• Calibre la escala de la entrada de proceso hasta que Pin indique con
exactitud el valor de la señal de proceso medida.
• Para poder observar el valor de Pin en las dos líneas inferiores de la
pantalla del punto de consigna, el motor debe estar en modo de prueba
(test) o funcionamiento (run) y en funcionamiento.
Medido en comparación con monitorizado
480.0 VAC Measured A -B
phase Line to Line
Measured vs. Monitored
480.0
vac
EGCP-2 configured for Line to Line (3 wire) PT input.
A
B
C
VIS-141
00-6-20
ALARMS: 1 UNIT: 1
Mains: -- Gen: ++
Engine: RUNNING
AUTO: ISOCHRONOUS
EGCP-2
ALARM / EVENT
ALARM CLEAR
Digital Control
SCRO
LL
ESC
Calibrate the
ENTER
Monitored Voltage
A PHASE PT SCALE
----------------------------------------------------------------------PHASE A VL-L: 482.5
STATUS CONFIG
i
ENGINE
SYSTEM
I/
SYN
O
PF /
SEQUENCE ATS
KVAR
Monitored
value using Calibration menu items.
Value to equal the
1.00
C
Measured
.
.
.
KW LOAD
Woodward
GE
N
Figura 4-32. Medido en comparación con monitorizado
Speed Bias Offset (Desviación de polarización de velocidad)
• Calibrado en fábrica para una desviación de 0 Vcc dentro de un intervalo de
±3 Vcc.
• Todos los controles de velocidad de Woodward operan con esta salida de
polarización, por lo que no debiera ser necesario calibrarlos.
• La calibración sí puede ser necesaria en los controles de velocidad de otros
fabricantes.
Voltage Bias Offset (Desviación de polarización de tensión)
• Configurada en fábrica para cero voltios CC.
• Configuración seleccionable en los rangos ±1 Vcc, ±3 Vcc, ±9 Vcc.
• Algunos reguladores requieren una desviación de polarización de tensión
positiva porque no pueden recibir un comando de polarización de tensión
negativa. Toda desviación calibrada e introducida en la polarización de
tensión aparecerá reflejada en el menú I/O Status (Estado de E/S).
• El control EGCP-2 recuperará siempre la desviación de polarización de
tensión que tenía cuando estaba fuera de línea.
Woodward 61
Page 68

Conjunto de control de generador y motor EGCP-2 Manual SP26086
trim
Voltage Bias input from EGCP-2
Trim Adj.
Internal Trim adjustment potentiometer
Volts
Figura 4-33. AVR típico con entrada auxiliar (Newage SX-440)
sets effective range of +/- 1 VDC bias
from EGCP-1 control. Usually a +/- 10%
voltage change for the +/-1VDC input
is more than sufficient for good VAR
and PF control.
Pot
Voltage Bias input
from EGCP-2
Trim Adj.
On regulators without a trim input
Volts
such as Leroy Summers AVRs,
an external trim pot must be used
to limit the range of the voltage
bias input from the EGCP-2 control.
Figura 4-34. AVR típico con potenciómetro externo de ajuste de tensión
AVR DROOP (caída de AVR)
• Se recomienda encarecidamente dotar el AVR de una entrada Droop CT
(CT de caída), y utilizar en el AVR un nivel de caída medio. Esto aumenta la
estabilidad del AVR en compartimiento de VAR/PF con cargas bajas.
• La compensación de corriente cruzada debiera desactivarse en el circuito
del CT de caída (Droop CT) del AVR.
+/- 1 VDC input from EGCP-2
trim
Volts
CT
Droop
62 Woodward
Figura 4-35. Caída de AVR
Page 69

Manual SP26086 Conjunto de control de generador y motor EGCP-2
PT Phase A Scale (Escala PT fase A)
• Calibra la entrada de tensión del PT fase A.
• Ajuste la escala del PT fase A hasta que estos valores coincidan con la
tensión del generador medida en la fase A.
PT Phase B Scale (Escala PT fase B)
PT Phase C Scale (Escala PT fase C)
• Lo mismo que antes, pero referido a las fases B y C del generador.
CT Phase A, B and C Offset (Desviación de fase A, B y C de CT)
• Calibra la detección de la entrada de las fases A, B o C de CT del EGCP-2
y la sitúa en corriente cero.
• Mida las corrientes reales del generador con un amperímetro de inserción o
con un amperímetro de panel. Verifique que la entrada de fase
seleccionada tiene 0 amperios.
• Calibre la lectura de CT de la fase seleccionada que figura en la ventana de
calibración.
• NOTA: La lectura de corriente no muestra valores negativos. Por
consiguiente, al poner a cero el valor, asegúrese de hacer el ajuste de
desviación de tal modo que la lectura de corriente vuelva exactamente al
valor cero. Verifique este extremo aumentando el valor de desviación,
viendo una lectura de corriente ligeramente positiva, y luego ajuste
lentamente el valor de desviación en pequeños incrementos hasta que la
lectura de corriente pase exactamente de un valor positivo a cero (0,0).
CT Phase A Scale (Escala CT fase A)
• Calibra la detección de la fase A de CT del EGCP-2.
• Cargue el generador y monitorice corrientes del generador en el menú de
resumen de fases.
• Mida las corrientes reales del generador con un amperímetro de inserción o
con un amperímetro de panel.
• Calibre la lectura la fase A del CT en resumen de fases.
CT Phase B Scale (Escala CT fase B)
CT Phase C Scale (Escala CT fase C)
• Igual que la configuración de CT correspondiente a la fase A.
• Si la polaridad del CT está invertida, esa fase indicará potencia negativa en
KW cuando se cargue en el menú Phase overview (Resumen de fases).
• Si los CT presentan fases incorrectas, las lecturas de KVAR del resumen
de fases resultarán muy superiores a las normales.
Bus PT Scale (Escala PT de bus)
• Similar a la graduación del PT del generador, pero esta escala es para la
entrada de PT monofásico de bus dirigida al EGCP-2.
• Ponga el sincronizador del EGCP-2 en modo de comprobación (“check”
mode) en el menú de configuración del sincronizador (Synchronizer Setup).
• Arranque el motor en modo run/load (funcionamiento/carga) conectado a un
bus con tensión (bien en paralelo a otro grupo electrógeno, bien a la red).
• Monitorice el menú Synchroscope status (Estado de sincroscopio). Observe
y calibre la lectura de voltios U: hasta que el valor medido (measured)
coincida con el monitorizado (monitored).
Woodward 63
Page 70

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Synchronizer (Sincronizador)
• Calibra la detección de error en ángulo de fase del EGCP-2.
• Calibrado en fábrica para un error en ángulo de fase cero entre las entradas
de fase A de bus y red (en función de la operación de sincronización) y la
entrada de fase A del generador.
• Con el sincronizador en modo de comprobación (“check”), y un bus activo,
monitorice el menú Synchroscope (Sincroscopio) del EGCP-2 en relación
con ángulo de fase (“phase angle”).
• Monitorice la tensión que recorre el contactor/disyuntor de generador
abierto o el sincroscopio del panel en busca de un error en el ángulo de
fase entre generador y bus.
• Ajuste la calibración del sincroscopio para la tensión más baja en el
disyuntor del generador, o para la lectura de las 12 en punto del
sincroscopio montado en panel.
Freq.
(Hz)
Analog Input
Figura 4-36. Entrada proporcional directa para la entrada de temperatura del
agua o de presión del aceite
Increasing offset
Freq.
Decreasing offset
Analog Input
Figura 4-37. Osciladores controlados por tensión — Efecto de desviación
64 Woodward
Page 71

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Increasing gain
Decreasing gain
Figura 4-38. Osciladores controlados por tensión — Efecto de ganancia
Battery VCO Gain (Ganancia VCO de la batería)
• Establece la pendiente de la entrada de batería con respecto al intervalo de
funcionamiento.
Battery VCO Offset (Desviación VCO de la batería)
• Establece el nivel o la desviación de la entrada de batería con respecto al
intervalo de funcionamiento.
• Tensión de batería (Battery Voltage) es una función de entrada de tipo
lineal.
VCO
Freq.
Battery Voltage
Figura 4-39. VCO de la batería
Oil Pressure Gain (Ganancia de la presión de aceite)
• Entrada del sensor de la presión de aceite.
• El sensor de ohmios del motor es una función directa, principalmente lineal.
• Establece la pendiente de la entrada de la presión de aceite.
• Monitorice el menú Engine Overview del EGCP-2 y compárela con la
presión de aceite del motor medida con el motor funcionando a la velocidad
nominal.
• Ajuste la ganancia hasta lograr una lectura correcta de la presión de aceite
mientras el motor está en funcionamiento.
Woodward 65
Page 72

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Oil Pressure Offset (Desviación de la presión de aceite)
• Establece el nivel o la desviación de la entrada de presión de aceite dirigida
a la frecuencia del VCO.
• Configúrelo para que se indique 0 psi en el menú Engine Overview del
EGCP-2 con el motor apagado.
• Gain (Ganancia) y Offset (Desviación) SÍ se afectan mutuamente, por lo
que es necesario verificar los ajustes en ambos extremos de la escala
(desde 0 psi hasta psi de servicio) si se efectúa un ajuste tanto en la
ganancia como en la desviación.
VCO
Freq.
Oil P r e ss s u re
(OHM S )
Figura 4-40. VCO de la presión de aceite
Water Temperature Gain (Ganancia de temperatura del agua)
• Entrada de Temperatura del agua.
• Se representa el sensor inverso, no lineal, de 0–200 Ω, montado en el
motor.
• Si se utiliza una entrada tipo resistencia no lineal, recurra a los
conmutadores DIP de resistencia en derivación situados en la parte
posterior del EGCP-2 (conmutadores 2, 3 y 4 activados). Estas resistencias
contribuyen a linealizar la entrada del sensor.
• Establece la pendiente de la entrada de la temperatura del agua.
• Monitorice el menú Engine Overview del EGCP-2 y compárela con la
temperatura del agua del motor medida con el motor funcionando a baja
temperatura de servicio.
• Ajuste la ganancia hasta lograr una lectura correcta de la temperatura del
agua mientras el motor está en funcionamiento.
• Menú Calibration (Calibración).
Water Temperature Offset (Desviación de temperatura del agua)
• Establece el nivel o la desviación de la entrada de la temperatura del agua.
• Monitorice Engine Overview y, con el motor funcionando a la temperatura
normal, ajuste Water Temperature Offset para lograr una correcta lectura
de temperatura.
• Se trata de una función inversa. La resistencia del sensor DISMINUYE a
medida que aumenta la temperatura del motor.
66 Woodward
Page 73

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Water Temperature (Temperatura del agua)
• Una prueba realizada con una muestra de los sensores de la presión de
aceite del control EGCP-2 ha demostrado que el sensor típico requiere la
siguiente ganancia/desviación para Ain1 en el menú de calibración:
• Gain (ganancia) 0,0242
• Offset (desviación) –11,90
• Una prueba realizada con una muestra de los sensores de temperatura del
agua ha demostrado que el sensor de temperatura típico requiere los
siguientes valores de ganancia (gain) y desviación (offset):
• Gain (ganancia) –0,0389.
• Offset (desviación) 246,0.
• Conmutadores de resistencia en derivación 3 y 4 cerrados en el SW-2 del
control EGCP-2.
Sensor without shunt
Sensor with shunt
VCO
Freq.
Water Tem p erature
Figura 4-41. VCO de la temperatura del agua
NetComm Dropouts (Caídas de NetComm)
• El número de comunicaciones en red perdidas o perturbadas que tolera la
unidad receptora.
• Un número excesivo de NetComm Dropouts en la red debido a cableado
defectuoso o configuración incorrecta hará que la unidad que sufre las
caídas parpadee intermitentemente en el menú Sequencing (Secuencia) del
EGCP-2. Normalmente se configura para un número de caídas
comprendido entre 5 y 10.
Unit Calibrated (Unidad calibrada) (verdadero/falso)
• Cuando se ha establecido el valor true (verdadero), se indica que la unidad
se ha calibrado en fábrica. Para cambiar el valor de esta función se
necesita un código de seguridad de nivel 4.
Woodward 67
Page 74

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Capítulo 5.
Características y funciones del control
Control del motor
• Arranque automático programable ante pérdida de red
• Todas las unidades en modo Auto con la detección de pérdida de red
activada arrancan y asumen carga.
• Punto de consigna de múltiples repeticiones de virado
• Temporizador de repetición de virado
• Alarma/parada por fallo de virado
• Desconexión de virado (rpm)
• Precalentamiento
• Relé de vacío/nominal
Protección del motor
• Presión de aceite
• Ajustes de alarma/parada por valores por exceso/defecto
• Temperatura del agua
• Ajustes de alarma/parada por valores por exceso/defecto
• Tensión de batería
• Ajustes de alarma/parada por valores por exceso/defecto
• Sobrevelocidad
• Ajustes de alarma/parada
Control de tensión y carga reactiva del generador
• Control de carga por VAR o factor de potencia en funcionamiento paralelo a
la red
• Compartimiento de factor de potencia en compartimiento de carga,
funcionamiento no en paralelo
• Referencia VAR/PF ajustable externamente
• Capacidad de control manual de tensión
Protección del generador
• Sobretensión y subtensión
• Sobrecorriente
• Corriente inversa
• Pérdida de excitación
• Sobrefrecuencia y subfrecuencia
• Generador estable por ajustarse a los límites de tensión y frecuencia
durante un determinado período de tiempo.
• Conmutador de carga por KVA
68 Woodward
Page 75

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Detección de red eléctrica
• Sobretensión y subtensión
• Sobrefrecuencia y subfrecuencia
• Aumento brusco de la carga
• Programable para alarma/detección de pérdida de red
• Temporizador de acción de pérdida de red
• Red estable por ajustarse a los límites de tensión y frecuencia durante un
determinado período de tiempo.
Sincronización
• Sincronización por adaptación de fases
• Funcionamiento en 3 modos
• run (funcionamiento), check (comprobación), permissive (autorización)
• Adaptación de tensiones
• Cierre de bus inactivo
• Temporizador del sincronizador
• Intento de reconexión/temporizador
• Capacidad de sincronización manual (modo autorización)
Control de carga
• Compartimiento de la carga proporcional
• Integración de control de carga base y control de proceso
• Cambio progresivo de carga
• Entradas de contactos remotos para cambiar los puntos de consigna de
carga base y proceso con aumento o disminución de las velocidades de
cambio progresivo
• Punto de disparo de descarga
• Capacidad de control de carga con caída
Secuencia
• Cada unidad del sistema tiene asignada una prioridad.
• La unidad maestra (prioridad más alta) pone automáticamente las unidades
en secuencia en línea o fuera de línea en función de la carga del sistema.
• Los unidades con prioridad superior se ponen en secuencia en línea en
función de su prioridad, y fuera de línea en función inversa a su prioridad.
• El punto de consigna de carga del sistema determina el nivel porcentual de
carga del sistema en función del cual más unidades se ponen en servicio o
fuera de línea.
• Los puntos de consigna de tiempo determinan el período de retardo para
poner en secuencia las unidades en línea/fuera de línea.
• Retardo de tiempo independiente para niveles de sobrecarga (+100%) del
sistema para poder poner en secuencia en línea más unidades
rápidamente.
Woodward 69
Page 76

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Virado del motor
El control EGCP-2 está diseñado para controlar automáticamente las funciones
de virado del grupo electrógeno del motor. Para controlar en condiciones de
seguridad el virado del motor, el EGCP-2 utiliza los siguientes puntos de
consigna, que figuran en el menú de ajuste Engine Control (Control del motor)
del software:
Preglow Time (Tiempo de precalentamiento) Crank Delay (Retardo de virado)
Crank Time (Tiempo de virado) Crank Repeats (Repeticiones de virado)
Crank Cutout (Desconexión de virado)
La descripción de los elementos anteriormente citados figura en la sección
Pantallas de ajuste de este manual, en la lista del Menú Configuration
(Configuración).
Secuencia de arranque:
Al recibir un comando de arranque, se producen los hechos siguientes:
1. La salida precalentamiento se excita durante el retardo de tiempo de
precalentamiento establecido, y permanece excitada durante todo el ciclo
de virado.
2. Una vez agotado de tiempo de precalentamiento, se excita la salida del
solenoide de combustible.
3. 200 ms después de excitarse la salida del solenoide de combustible, se
excita la salida de virado.
En este momento, el motor debe estar virando a unas determinadas rpm, y
recibiendo combustible. Lo normal es que en estas condiciones se produzca el
arranque. Para comprobar si se produce el arranque, el EGCP-2 monitoriza el
captador magnético del motor. Si la entrada del captador magnético indica que
el motor está funcionando por encima de la velocidad de desconexión de virado,
el EGCP-2 elimina las salidas de virado y precalentamiento, dejando excitado el
solenoide de combustible. El estado del motor en el menú de descripción
general del control pasa de “OFF” (fuera de servicio) a “RUN” (funcionamiento).
Si por alguna razón el motor no alcanza el nivel de rpm de desconexión de
virado, el EGCP-2 hace virar el motor durante el tiempo de virado. Si en este
tiempo el motor no logra sobrepasar el nivel de desconexión de virado, el EGCP2 elimina la señal de la salida de virado, espera durante el retardo de virado y, si
lo permite el número de repeticiones de virado, vuelve a hacer virar el motor
(RETRY). Esta secuencia persiste hasta que se agota el número de repeticiones
de virado o hasta que la velocidad del motor sobrepasa el ajuste de rpm de
desconexión de virado, lo que suceda primero. Si se agota el número de
repeticiones de virado, el EGCP-2 activa la salida Crank Fail Alarm (Alarma de
fallo de virado) en función de la configuración que tenga el punto de consigna de
esta alarma.
NOTA
La salida de precalentamiento puede permanecer excitada entre los intentos
de virado si el tiempo de precalentamiento es superior a la suma de los
valores de los temporizadores de tiempo de virado y de retardo de virado.
70 Woodward
Page 77

Manual SP26086 Conjunto de control de generador y motor EGCP-2
IMPORTANTE
Ponga a cero Crank Repeats (Repeticiones de virado) al arrancar el motor
por primera vez con el EGCP-2. Así evitará que el arrancador y la corona
dentada dañen el motor si la entrada del MPU dirigida al control presentase
algún fallo. Monitorice el menú Engine Overview Status (Estado general del
motor) en el primer arranque y confirme la lectura de rpm durante el virado.
Una vez efectuado un arranque correcto, las repeticiones de virado puede
fijarse el valor más adecuado para la aplicación.
Salida de relé IDLE/RATED (vacío/nominal)
El EGCP-2 puede configurarse para contar con una salida de relé que señale al
control electrónico de velocidad del motor que pase de funcionamiento a
velocidad en vacío a funcionamiento a velocidad nominal. Cuando el control se
ha configurado para esta salida, la salida discreta 12 se excita para proporcionar
la indicación del paso de vacío a nominal.
La indicación del paso de vacío a nominal se produce después de un arranque
correcto (generador por encima de la velocidad de desconexión de virado), el
motor está funcionando al punto de consigna de la velocidad en vacío o por
encima, y se ha agotado del tiempo de retardo en vacío marcado por el
correspondiente punto de consigna.
Control de tensión del generador
El EGCP-2 tiene la posibilidad de controlar la tensión del grupo electrógeno.
Esta posibilidad se utiliza para controlar cuatro operaciones distintas que exigen
ajustar la tensión del generador.
1. Ajuste manual de la tensión
2. Adaptación de tensiones durante la sincronización en el disyuntor del
generador o de la red eléctrica
3. Compartimiento de carga reactiva entre múltiples unidades en un bus
aislado
4. Control de carga reactiva estando en paralelo a la red eléctrica.
La tensión del generador, o la carga reactiva (según la operación) se ajusta
inyectando una señal de polarización de tensión en el regulador automático
de tensión (AVR). El EGCP-2 puede configurarse para salidas de ±1 Vcc,
±3 Vcc y ±9 Vcc. El intervalo de la salida se selecciona con la opción
“Voltage Bias Type” (Tipo de polarización de tensión) del menú
Configuration del EGCP-2.
Seleccione la entrada de intervalo de tensión que recomienda el fabricante del
AVR.
La tensión del generador puede controlarse manualmente con las entradas
discretas de aumentar tensión y disminuir tensión del EGCP-2. La velocidad de
cambio del ajuste manual de tensión se establece en el menú de ajuste Reactive
Load Control (Control de carga reactiva), en el punto de consigna Voltage Ramp
Time (Tiempo de cambio progresivo de tensión). El tiempo de cambio progresivo
de tensión es la cantidad de tiempo que le lleva al EGCP-2 enviar al AVR una
señal de polarización de tensión de 0 a 100% o de 0 a –100%.
Woodward 71
Page 78

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Operando en modo prueba (TEST mode), el ajuste manual de tensión sólo se
permite a través de las entradas de aumentar y disminuir tensión. Esto permite
probar la salida de polarización de tensión y los niveles de tensión del generador
antes de operar con carga en el generador.
Operando en modo Isoch (isócrono), el EGCP-2 no permite ajustar
manualmente la tensión, a menos que el punto de consigna Load Control
(control de carga) del menú de ajuste de Configuration tenga establecido el valor
“Droop” (caída), o que el punto de consigna VAR/PF Control (Control de
VAR/PF) del menú de ajuste Reactive Load Control (Control de carga reactiva)
tenga establecido el valor “Disabled” (Desactivado). Cualquiera de estos dos
valores implica la utilización de un control manual de tensión y la inactividad de
las funciones del control de carga reactiva.
NOTA
Se recomienda encarecidamente usar el control automático de carga
reactiva del EGCP-2 para acondicionar debidamente la potencia en todo el
intervalo de carga del generador o generadores. Esto se hace configurando
el punto de consigna Load Control del menú de ajuste Configuration en
Normal o Soft Transfer (según la aplicación), y el punto de consigna VAR/PF
Control del menú de ajuste Reactive Load Control en control VAR o PF
(según la aplicación). Para más detalles sobre estas funciones, consulte las
secciones Control de carga real y Control de carga reactiva de este manual.
El nivel porcentual de la salida de polarización de tensión puede monitorizarse
en la pantalla de estado I/O Display (Visualización de E/S) del EGCP-2. Se trata
de un aspecto que resulta útil monitorizar durante el arranque inicial de la
unidad. Emitiendo entradas de aumento o disminución de tensión hacia el
control mientras se opera en modo de prueba (Test), puede efectuarse
fácilmente la confirmación de que los niveles de tensión del generador son los
adecuados en los diversos puntos de polarización de tensión. Normalmente la
tensión del generador no debe cambiar más de un ±10% en una salida de
polarización de tensión del ±100% procedente del EGCP-2.
Los demás modos de funcionamiento del grupo electrógeno dependen de las
funciones del Control de carga reactiva (Reactive Load Control) del EGCP-2.
Para más detalles sobre el control de tensión y de carga reactiva, consulte la
sección “Control de carga reactiva” del manual.
Control de carga del generador
Teoría de funcionamiento del sensor de potencia
La técnica de medición de potencia por procesamiento de señales digitales
(DSP) que utiliza el control EGCP-2 implica un muestreo periódico de tensión y
corriente en un número entero de ondas. El microprocesador procesa el
producto de las muestras de tensión y corriente, y luego suma y promedia los
productos para presentar un cálculo de potencia.
72 Woodward
Page 79

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Descripción del hardware del sensor de carga
El sensor de carga digital obtiene información de tiempos de la señal de tensión
de la fase A del generador. Las tensiones proporcionales a la tensión y a la
corriente de carga de cada fase se encaminan a los circuitos de muestreo y
retención de los convertidores A/D. Los valores simultáneos de tensión y
corriente recogidos en el muestreo se retienen cuando se recibe del
microprocesador una señal de guardar conversión. Cada entrada se convierte
entonces y se genera una interrupción cuando se convierten todas las entradas.
A continuación el microprocesador lee los valores digitales de los registros A/D.
Este procedimiento se repite a intervalos periódicos para disponer de datos que
permitan seguir procesando las señales.
Para obtener una medición de potencia precisa en presencia de señales
parásitas y armónicos en las entradas, se toman varias muestras de cada forma
de onda en varios ciclos de la entrada.
El control EGCP-2 tiene cuatro modos básicos de funcionamiento del control de
carga del generador. Estos cuatro modos son:
• Caída
• Compartimiento isócrono de la carga
• Carga base
• Control de proceso
El modo específico de control del generador en el que se encuentra la unidad en
todo momento puede monitorizarse en el menú Control Overview (Descripción
general del control).
Aquí se ofrece una descripción de cada uno de estos modos de control de carga
y de los diversos estados de funcionamiento que ponen el EGCP-2 en cada uno
de estos modos de control de carga.
Caída
El Control de carga con caída (Droop Load Control) del EGCP-2 utiliza los KW
detectados en el generador para suministrar realimentación negativa a la
referencia de velocidad del regulador del control de velocidad a través de la
salida de polarización de velocidad. Esto produce un descenso de la frecuencia
del generador a medida que se aumenta la carga operando como unidad
sencilla en un bus aislado. Al aumentar la entrada de aumento de la velocidad
operando de esta manera aumenta gradualmente la velocidad del motor, con lo
que aumenta la frecuencia del grupo electrógeno.
Operando en paralelo a la red, el funcionamiento en caída permite el control de
carga en KW del generador a través de las entradas de aumento y disminución
de la velocidad dirigidas al EGCP-2. Dado que la red determina la frecuencia del
generador, si se cambia la referencia de velocidad mientras se opera en paralelo
a la red se provoca un cambio de KW.
Normalmente el control de carga con caída sólo se utiliza durante la puesta en
servicio del EGCP-2. Permite un total control manual de la carga del generador
mientras se está en paralelo a la red eléctrica.
Woodward 73
Page 80

Conjunto de control de generador y motor EGCP-2 Manual SP26086
El EGCP-2 sólo se puede utilizar en caída si el punto de consigna del menú de
ajuste de la configuración denominado “Load Control” (Control de carga) se
modifica y recibe el valor “Droop” (Caída), o si la unidad se utiliza con la entrada
Generator CB Aux abierta mientras está conectada a una carga, o a la red
eléctrica. Ninguna otra operación ni punto de consigna del software puede
cambiar el ajuste del modo de control de carga con caída.
Figura 5-1. Modo de caída
Isócrono
Isócrono significa repetir a una sola velocidad o teniendo una frecuencia o
período fijos. Un grupo electrógeno que opera en modo isócrono funciona a la
misma frecuencia establecida independientemente de la carga que suministre
hasta la plena capacidad de carga del grupo electrógeno, como se representa
en la figura 5-2. Este modo puede utilizarse en un grupo electrógeno que
funcione solo en un sistema aislado.
Figura 5-2. Modo isócrono
74 Woodward
Page 81

Manual SP26086 Conjunto de control de generador y motor EGCP-2
El modo isócrono puede utilizarse también en un grupo electrógeno conectado
en paralelo a otros grupos electrógenos. A menos que los controles del grupo
electrógeno admitan compartimiento de carga y control de velocidad, sólo uno
de los grupos electrógenos que operan en paralelo pueden estar en modo
isócrono. Si dos grupos electrógenos que operan en modo isócrono sin
compartimiento de carga se conectan conjuntamente a la misma carga, una de
las unidades intentará transportar toda la carga y la otra descargará toda la
suya. Para compartir carga con otras unidades, deben emplearse otros medios
para impedir que cada grupo electrógeno intente o bien absorber toda la carga o
bien accionar el motor.
Compartimiento de carga con caída/isócrono en un bus
aislado
Caída/isócrono combina los dos primeros modos. Todos los grupos
electrógenos del sistema salvo uno se accionan en modo de caída. La única
unidad que no opera en caída lo hace en modo isócrono. Se la conoce como la
máquina oscilante. En este modo, las máquinas en caída funcionan a la
frecuencia de la unidad isócrona. Los valores de caída y velocidad de cada
unidad en caída se ajustan para que cada una genere una cantidad fija de
potencia, como se representa en la figura 5-3. La potencia de salida de la
máquina oscilante cambia en función de los cambios que experimenta la
demanda de carga.
Figura 5-3. Compartimiento de carga caída/isócrono
La carga máxima en este tipo de sistema tiene como límite la salida combinada
de la máquina oscilante más la potencia total establecida de las máquinas en
caída. No se puede permitir que la carga mínima del sistema descienda por
debajo de la salida establecida para las máquinas en caída. Si lo hace, la
frecuencia del sistema cambia y la máquina oscilante puede accionar el motor.
La máquina con la mayor capacidad de salida debe operar como máquina
oscilante, a fin de que el sistema acepte los máximos cambios de carga que su
capacidad permita.
Woodward 75
Page 82

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Compartimiento de carga isócrono en un bus aislado
El compartimiento isócrono de la carga es el medio más habitual de combinar
varios generadores en paralelo a una carga común en un bus aislado. El EGCP2 utiliza el control isócrono de la carga cuando opera en modo Múltiple Unit
(unidad múltiple) con Load Control Mode en Normal o en Soft Transfer. El
compartimiento isócrono de la carga hace funcionar todos los grupos
electrógenos de un sistema en modo isócrono. El compartimiento de la carga se
realiza utilizando el sensor de la carga del EGCP-2 para polarizar la referencia
de velocidad del regulador isócrono. Los sensores de carga del EGCP-2 se
conectan por medio de una red RS-485 entre controles. En el caso del control
EGCP-2, el compartimiento isócrono de la carga se efectúa digitalmente a través
de esta red. Todo desequilibrio de la carga entre distintas unidades provoca un
cambio en el circuito de regulación de cada regulador. Si bien cada unidad sigue
funcionando a velocidad síncrona, estos cambios obligan a cada máquina a
suministrar una parte proporcional de potencia para satisfacer la demanda total
de carga del sistema.
Carga base por contraposición a la red eléctrica
La carga base es un método de establecer una carga base o fija en una
máquina que opera en paralelo a la red eléctrica. El control EGCP-2 hace
funcionar el grupo electrógeno en carga base siempre que el generador está en
paralelo a la red eléctrica, a menos que se seleccione un modo de
funcionamiento por control de proceso a través de la entrada discreta de
proceso (Process). Esto se hace utilizando un control isócrono de la carga y
suministrando una referencia en función de la cual controlar la carga. El
regulador obligará a aumentar o reducir la salida del generador hasta que la
salida del sensor de carga sea igual al valor de referencia. La referencia de
carga base se establece en el menú de ajuste Real Load Control (Control de
carga real) del EGCP-2. En este punto, el sistema se halla en equilibrio.
La ventaja de la carga base sobre la caída radica en que al separarse de una
red eléctrica, no se produce ningún cambio de frecuencia. Eliminando
simplemente la señal de polarización necesaria para mantener la referencia de
carga base al desconectar de la red eléctrica (Mains CB Aux abierta) el sistema
vuelve al control isócrono de carga.
Al EGCP-2 sólo se le permite ponerse en paralelo a la red en un modo de
funcionamiento Paralelo a la red eléctrica. Cuando está configurado para este
tipo de funcionamiento, el EGCP-2 opera en modo de control de carga base o de
proceso mientras se halla en paralelo a la red. El EGCP-2 conmuta
automáticamente entre funcionamiento con carga base y funcionamiento
isócrono según esté o no cerrada la entrada Mains Breaker CB Aux al mismo
tiempo que lo está la entrada Generator CB Aux. Si la entrada CB AUX tanto del
generador como de la red eléctrcia está cerrada, el EGCP-2 percibe que está en
paralelo a la red y opera en modo de control de carga base. El EGCP-2 funciona
en modo de control de proceso, que se trata más adelante en esta misma
sección, si las entradas discretas tanto de proceso (Process) como de
funcionamiento con carga (Run with Load) están activas (On).
76 Woodward
Page 83

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Funciones automáticas de carga del generador
Las funciones de carga automática del generador del EGCP-2 están concebidas
para utilizarse con el control de velocidad al efecto de controlar automáticamente
la carga y descarga del generador. De esta manera se logra una transferencia
sin choques al poner el generador en paralelo a un sistema de compartimiento
de carga o bus infinito, o al retirar el generador de un sistema.
Descripción del control de proceso
La función de control de proceso del control EGCP-2 controla todo proceso en el
que el parámetro controlado venga determinado por la carga del generador, y el
parámetro controlado podrá monitorizarse como señal de entrada de 4–20 mA o
1–5 Vcc.
El control compara la señal de entrada con el punto de consigna de Referencia
de proceso (Process Reference) presente en el menú de ajuste Real Load
Control (Control de carga real) del EGCP-2. Este punto de consigna utiliza como
unidades miliamperios, a fin de poder relacionarlo fácilmente con la señal de
entrada de 4–20 mA o 1–5 Vcc. El EGCP-2 ajusta entonces la carga del
generador para mantener el punto de consigna que se desea. El EGCP-2 sólo
funciona en modo de control de proceso si está configurado para ser una unidad
en paralelo a la red eléctrica y recibe una entrada discreta Auto (sutomático),
Run with Load (funcionamiento con carga) y Process (proceso). Asimismo, el
EGCP-2 puede operar en modo de transferencia blanda de proceso si el punto
de consigna Load Control Mode (Modo de control de carga) del menú de ajuste
Configuration está configurado como Soft Transfer, y la entrada discreta Test
está cerrada junto con las entradas discretas Run with Load y Process. En un
modo de transferencia blanda, el EGCP-2 carga el generador o generadores
(según la aplicación) en función del nivel de referencia de proceso. Al
alcanzarse el valor de referencia en la señal de entrada de 4–20 mA o 1–5 Vcc,
el EGCP-2 abre el disyuntor de la red. Este modo de Transferencia blanda (Soft
Transfer) se emplea para transferir el suministro de alimentación para la carga
de la red al generador.
En modo de control de proceso, las entradas de los contactos de Raise Load
(Aumentar carga) y Lower Load (Disminuir carga) operan con arreglo a la
referencia del control de proceso. El tiempo de cambio progresivo de estas
entradas de aumento y disminución de la carga mientras se opera en modo de
control de proceso se establece en el menú de ajuste Real Load Control (Control
de carga real), y en el punto de consigna Process Raise/Process Lower Ramp
Rate (Aumentar/disminuir la velocidad de cambio progresivo de proceso). Este
punto de consigna está graduado en mA por segundo.
La primera vez que se selecciona la función proceso, la referencia que se fija es
igual a la referencia interna o remota de proceso. Si la entrada de proceso y la
referencia de proceso no son iguales, el control cambia progresivamente la
referencia de carga en el sentido adecuado para reducir el error diferencial.
Cuando el error del proceso es igual a cero o la referencia de carga alcanza los
valores máximo o mínimo, se activa el control de proceso.
Woodward 77
Page 84

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Cuando el control de proceso está activado, la señal de error entre la referencia
de proceso y la señal de proceso se introduce en un controlador PID
(Proportional, Integral, Derivative – Proporcional, Integral, Diferencial) que opera
en cascada con el control de carga. La salida del controlador es una referencia
de carga que está limitada por los puntos de consigna de High/Low Load Limit
(Límite de carga alta/baja) en la pantalla de ajuste Real Load Control (Control de
carga real) para evitar una sobrecarga o una inversión de la potencia del
generador. La señal de ajuste de la carga se transmite del control de carga al
control de velocidad para fijar en el control la carga necesaria para mantener el
nivel de proceso que se desea.
En una configuración de unidades múltiples paralelas a la red eléctrica, la unidad
maestra (prioridad numérica más baja) actúa también como unidad maestra de
proceso. La unidad maestra debe recibir la señal de la entrada de proceso de 4–
20 mA o 1–5 Vcc. Si la unidad maestra está operando en modo Auto, y por tanto
forma parte de la red de secuencia y control entre unidades, controlará todas las
unidades esclavas que están en modo Auto para mantener su propia referencia
de proceso. Las unidades esclavas operan en un modo tipo de compartimiento
de carga en el que la carga total del sistema se divide por igual entre las
unidades, proporcionalmente a su capacidad de carga nominal. La unidad
maestra pondrá automáticamente las unidades esclavas en secuencia en carga
y fuera de carga, según convenga, para mantener la referencia de proceso.
Otras características del control de proceso son un filtro ajustable de la señal de
la entrada de proceso y una banda muerta ajustable del integrador. El filtro
ajustable permite reducir el ancho de banda al controlar un proceso que emite
señales parásitas, como el propio de las aplicaciones con gas combustible de
digestor. La banda muerta resulta útil tanto en aplicaciones que emiten señales
parásitas como en procesos muy lentos.
La función de control de proceso se puede configurar para acción directa e
inversa. El control de proceso directo se produce cuando la señal de la entrada
detectada aumenta a medida que lo hace la carga (como cuando la entrada
detectada es presión de escape o potencia exportada). Un control de acción
inversa es cuando la señal de la entrada detectada disminuye a medida que
aumenta la carga (como al controlar la potencia importada, caso en el que la
potencia importada disminuye a medida que el sistema generador capta una
parte mayor de la carga local).
Descripción del control de carga reactiva
Cuando se pone en paralelo a la red un generador pequeño, la función de
adaptación de tensiones del sincronizador ajusta la tensión del generador para
que coincida con la tensión de la red. Las variaciones de tensión que quizás se
produzcan en el sistema de la red eléctrica después de la disposición en
paralelo pueden provocar grandes cambios en la corriente reactiva del
generador. El control de VAR/factor de potencia ofrece un control en circuito
cerrado de los VAR o del factor de potencia al operar en paralelo a otro sistema
de potencia cuando ese sistema puede aceptar la carga reactiva.
Sin embargo, el ajuste de tensión sólo incide en la potencia reactiva cuando se
dispone de otro sistema para aceptar la carga reactiva. Por tanto, las funciones
del control de VAR/factor de potencia se sustituyen automáticamente por el
compartimiento del factor de potencia cuando una o varias unidades operan en
modo de compartimiento isócrono de carga en un bus aislado (Mains CB Aux
está abierto).
78 Woodward
Page 85

Manual SP26086 Conjunto de control de generador y motor EGCP-2
El modo de funcionamiento con el control de VAR/PF se selecciona
estableciendo el punto de consigna de VAR/PF Control Mode (Modo de control
de VAR/factor de potencia) en el menú de ajuste Reactive Load Control (Control
de carga reactiva). Cuando se selecciona el modo de control de VAR o PF, la
función de control se activa siempre que se cierra el contacto de Generator CB
Aux, y el control está configurado para Control de carga Normal o Soft Transfer.
El control de VAR/PF se cancela cuando Load Control Mode está configurado
para funcionamiento Droop (caída). El control de VAR/PF puede desactivarse
configurando VAR/PF Control Mode como Disabled (desactivado). La salida de
polarización de tensión se reinicializa y pone al 0% cuando se abre la entrada
Generator CB Aux.
NOTA
Si el regulador de tensión dispone de compensación de corriente cruzada,
debe retirarse antes de utilizar el modo de control de VAT/PF, pues de lo
contrario podrían producirse inestabilidades. El CT de caída debe
permanecer conectado al regulador de tensión.
Control VAR
El control de VAR ajusta la tensión del generador para mantener en el generador
una carga con potencia reactiva constante (kVAR) en todo el intervalo operativo
en KW mientras el generador está en paralelo a la red. Así se garantiza una
excitación suficiente del campo del generador en todas las condiciones de
carga. Para fijar los VAR que interesan se dispone de un punto de consigna. La
función de control de VAR puede activarse con el punto de consigna de
selección del modo de VAR/PF Control. La referencia de KVAR puede
cambiarse una vez que el generador está en paralelo a la red eléctrica,
emitiendo una entrada de contacto de aumentar/disminuir tensión dirigida al
EGCP-2. Al aumentar la referencia de KVAR aumenta la salida de polarización
de tensión dirigida al regulador de tensión, lo que desencadena la exportación
de VAR a la red. Al disminuir la referencia de VAR disminuye la salida de
polarización de tensión dirigida al regulador, lo que desencadena la absorción
de VAR de la red eléctrica.
Control del factor de potencia
El control de factor de potencia ajusta la tensión del generador para mantener un
ángulo de potencia constante en todo el rango operativo en KW mientras el
generador está en paralelo a la red. Para fijar la referencia de factor de potencia
que interesa se dispone de un punto de consigna. La función de control de factor
de potencia puede activarse con el punto de consigna de selección del modo de
VAR/PF Control. La referencia de PF puede cambiarse una vez que el
generador está en paralelo a la red, emitiendo una entrada de contacto de
aumentar/disminuir tensión dirigida al EGCP-2. Al aumentar la referencia de PF
aumenta la salida de polarización de tensión dirigida al regulador de tensión, lo
que hace que el PF se mueva en un ángulo creciente de retardo de fase de PF.
Al disminuir la referencia de PF disminuye la salida de polarización de tensión
dirigida al regulador, lo que hace que el PF se mueva en un ángulo creciente de
avance de fase de PF.
Woodward 79
Page 86

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Compartimiento del factor de potencia
Cuando se selecciona control de VAR o de factor de potencia, y el control
EGCP-2 está operando en modo de compartimiento isócrono de la carga, se
selecciona automáticamente el compartimiento del factor de potencia. El
compartimiento del factor de potencia ajusta los reguladores de tensión para que
todos los generadores transporten la misma proporción de carga reactiva
equilibrando el factor de potencia de todas las unidades. Para fijar la tensión de
servicio del sistema se dispone de un punto de consigna de referencia de
tensión. Varios controles EGCP-2 que operen en modo de Power Factor Sharing
(Compartimiento del factor de potencia) compensarán sus respectivas tensiones
para compartir la carga reactiva en el bus aislado y operar así en torno al valor
de la referencia de tensión.
Descripción del sincronizador
Sincronización, tal como se aplica normalmente a la generación de electricidad,
es la igualación de la onda de tensión de salida de un generador eléctrico
síncrono de corriente alterna con la onda de tensión de otro sistema eléctrico de
corriente alterna. Para sincronizar y conectar en paralelo los dos sistemas,
deben tenerse en cuenta cinco condiciones:
• el número de fases de cada sistema;
• el sentido de giro de las fases;
• las amplitudes de la tensión de los dos sistemas;
• las frecuencias de los dos sistemas;
• el ángulo de fase de la tensión de los dos sistemas.
Las dos primeras condiciones se verifican cuando el equipo se elige, instala y
cablea. El sincronizador adapta las demás condiciones (tensión, frecuencia y
fase) antes de que se cierren los disyuntores de la disposición en paralelo.
Descripción del funcionamiento
En esta sección se explica cómo se produce la adaptación entre generador y
bus y cómo las funciones del sincronizador verifican todas las condiciones.
Modos de funcionamiento
El control EGCP-2 tiene capacidad para sincronizar en los disyuntores tanto del
generador como de la red eléctrcia, en función de la aplicación del grupo
electrógeno y la propia configuración del EGCP-2. Un EGCP-2 configurado para
funcionamiento No en paralelo nunca permitirá que los disyuntores del
generador y de la red eléctrica se cierren al mismo tiempo, y por tanto no
sincroniza en el disyuntor de la red. Las unidades configuradas para
funcionamiento en paralelo a la red eléctrica sincronizarán activamente el
generador o, en el caso de un sistema de unidades múltiples, sincronizarán los
generadores con la red eléctrica antes de cerrar el disyuntor de la conexión con
la red eléctrica.
80 Woodward
Page 87

Manual SP26086 Conjunto de control de generador y motor EGCP-2
El EGCP-2 monitoriza la fase A del generador y la compara con la fase A de la
entrada del PT del bus o con la fase A de la entrada del PT de la red eléctrica.
La entrada del PT de bus se selecciona a través de DO7 (conectar bus local). El
PT de bus siempre se monitoriza cuando el EGCP-2 está sincronizando o
cerrando el bus inactivo en el disyuntor del generador. La detección del PT de
bus es una situación momentánea, ya que el EGCP-2 volverá siempre a detectar
la entrada del PT de la red eléctrica al conmutar a DO8 (Mains Disconnect –
Desconectar red) una vez completa la sincronización del generador. La
conmutación a Mains PT permite al EGCP-2 monitorizar en busca de una
situación de pérdida de red eléctrica cuando se opera con un generador que no
está sincronizando en su disyuntor.
NOTA
En sistemas que operan en paralelo a la red o con modos de detección de
pérdida de red, se recomienda, para lograr un correcto funcionamiento, que
cada unidad EGCP-2 perteneciente a ese sistema reciba las entradas del PT
de red y del PT de bus.
El menú de ajuste del sincroscopio se usa para configurar la acción de
sincronización del EGCP-2. Las opciones de ajuste del software que figuran en
el menú del sincroscopio corresponden a las funciones de sincronización tanto
del disyuntor/contactor del generador como de la red.
El comportamiento del sincronizador lo determinan los tres modos de
funcionamiento de que dispone el EGCP-2. Estos tres modos con Run
(Funcionamiento), Check (Comprobación) y Permissive (Autorización).
El modo Run (Funcionamiento) permite el funcionamiento normal del
sincronizador y las señales de cierre del disyuntor. La señal de polarización de
velocidad (se explica más adelante) se mantiene durante toda la señal de cierre
del disyuntor. Cuando se ha agotado el tiempo establecido para la señal de
cierre y el EGCP-2 recibe la señal de cierre del contacto Auxiliar de disyuntor
(CB Aux), el sincronizador se desactiva. El sincronizador se reinicia
automáticamente una vez que el generador se pone fuera de carga y su
disyuntor se abre.
El modo Check (Comprobación) permite la sincronización normal y la adaptación
de tensiones, pero no emite ninguna señal de cierre de disyuntor.
El modo Permissive (Autorización) activa la función synch-check (comprobación
de sincronización) para lograr una correcta sincronización, pero el
funcionamiento del sincronizador no afecta a la velocidad del motor ni a la
tensión del generador. Si fase, frecuencia y tensión se ajustan a los límites
establecidos durante el tiempo de parada establecido, el sincronizador emite el
comando de cierre del disyuntor.
Cierre de bus inactivo
Cuando se detecta un bus inactivo y está activado un modo de cierre de bus
inactivo en un sistema de unidades múltiples, el sincronizador intentará obtener
un bloqueo exclusivo de la autorización para emitir un comando de cierre de
disyuntor. Esta medida de seguridad es necesaria para evitar que dos o más
unidades cierren sus disyuntores al mismo tiempo. Para disponer de esta
garantía, un mensaje de red solicitando el bloqueo se dirige a los demás
controles EGCP-2 que están activos en la red en ese momento.
Woodward 81
Page 88

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Cuando un control EGCP-2 recibe una solicitud de bloqueo, hace lo siguiente:
1. Si en ese momento no se está haciendo una solicitud de autorización de
bus inactivo, se indica una situación de bus inactivo y la entrada discreta
GENERATOR AUX CONTACT (Contacto auxiliar del generador) está
inactiva (el control EGCP-2 devuelve un mensaje de contestación a la
unidad solicitante).
NOTA
La función de apertura de GENERATOR AUX CONTACT hace una copia de
seguridad de la situación de bus inactivo en caso de que falle el PT del bus.
Si por falta de tensión del bus se indica una situación de bus inactivo, pero
el disyuntor del generador está cerrado, no se envía contestación.
2. Si también se está haciendo una solicitud de autorización de bus inactivo y
esa solicitud precede en cuanto a orden a la solicitud recibida, se retiene la
solicitud recibida; de lo contrario, se envía la contestación. (En caso de
empate en cuanto a orden, gana la unidad que tenga asignada la dirección
de red más baja.)
Cuando todas las demás unidades han contestado verificando que indican
también un bus inactivo (entrada del bus inferior a 40 Vca) y no retienen un
bloqueo, la unidad solicitante retiene la autorización de bloqueo y puede
intentar cerrar el disyuntor de su circuito. El bloqueo se libera
automáticamente tras emitir el comando de cierre del disyuntor del circuito.
Esto permitirá que cualquier otra unidad obtenga autorización para bloquear
si el disyuntor no se cierra.
El usuario puede activar o desactivar la función de cierre de bus inactivo
con el punto de consigna Dead Bus Closure del menú de ajuste
Synchroscope (Sincroscopio).
Adaptación de tensiones
Las tensiones de los generadores, en un sistema en paralelo, deben coincidir
dentro de un estrecho margen porcentual, a fin de minimizar el flujo de potencia
reactiva del sistema. Si dos generadores síncronos de tensión desigual se
colocan en paralelo, la tensión combinada presentará un valor distinto de la
tensión generada por separado por cualquiera de ellos. La diferencia entre
ambas tensiones da lugar a que por el sistema circulen corrientes reactivas, con
la consiguiente merma en la eficacia del sistema.
Si un generador síncrono se coloca en paralelo a un sistema mayor, como una
red eléctrica, una diferencia entre las respectivas tensiones antes de la
disposición en paralelo no cambiará la tensión del bus. Si la tensión del
generador es inferior a la del bus, se extrae del bus potencia reactiva que se
utiliza para excitar el generador hasta alcanzar la tensión superior del bus.
En el caso de que la tensión del generador sea bastante baja, el flujo de
potencia reactiva podría motorizar el generador, con posibles desperfectos en
sus devanados.
82 Woodward
Page 89

Manual SP26086 Conjunto de control de generador y motor EGCP-2
El microprocesador procesa entonces los valores eficaces (RMS) de las
tensiones. El procesador emite el correspondiente ajuste de la señal de
polarización de tensión, si se utiliza, hacia el regulador de tensión a fin de ajustar
la tensión del generador dentro de la ventana establecida por encima de la
tensión del bus. Para garantizar que se generará potencia reactiva, el rango de
la ventana oscila entre la misma tensión que el bus y el porcentaje indicado por
encima de la tensión del bus.
La función de adaptación automática de tensiones puede activarse o
desactivarse con un punto de consigna. Cuando está activada, la adaptación de
tensiones opera en los modos tanto Check (Comprobación) como Run
(Funcionamiento) y sólo lo verifica la función sync-check (comprobación de
sincronización) en el modo Permissive (Autorización). Cuando está activado en
un control EGCP-2 que monitoriza y controla el disyuntor de la red eléctrica, la
adaptación de tensiones se produce tanto en el disyuntor del generador como en
el de la red antes de que el sincronizador emita un comando de cierre de
disyuntor al colocar el generador o generadores en paralelo a la red.
Sincronización por adaptación de fases
El modo de sincronización de adaptación de fases corrige la frecuencia y fase
del generador para fijarlas en la frecuencia y fase del bus. El microprocesador
emplea técnicas de procesamiento de señales para obtener la diferencia de fase
entre las señales de tensión de la fase A del bus y de la fase A del generador.
Cuando existe una diferencia, el sincronizador envía un señal de corrección al
control de velocidad. La señal de corrección de la salida de polarización de
velocidad aumenta o reduce la velocidad del motor en función de si el
deslizamiento es más rápido o más lento que el bus. Un controlador PI
(proporcional, integral) suministra la señal de corrección. El controlador PI está
provisto de ajustes de Ganancia (Gain) y Estabilidad (Stability) que permiten un
funcionamiento estable de la función del sincronizador automático en una amplia
gama de dinámicas del sistema.
Comprobación de sincronización
La función comprobación de sincronización (synch-check) establece el momento
en que se cumplen todas las condiciones que posibilitan una correcta
sincronización y excita el relé de cierre del disyuntor. La comparación entre la
tensión del generador y la tensión del bus se realiza si está activada la función
de adaptación de tensiones. La tensión del generador debe estar dentro de la
ventana de tensión establecida por encima de la tensión del bus para que pueda
emitirse un comando de cierre de disyuntor.
Para minimizar los transitorios, el disyuntor debe cerrarse cuando la diferencia
de fase entre el generador y el bus se aproxime a cero. Asimismo, el
mantenimiento del error de ángulo de fase entre generador y bus dentro de la
ventana de fase máxima (Max Phase Window) establecida durante un
determinado tiempo de parada (Dwell Time) permite configurar el sincronizador
para una amplia gama de situaciones de sincronización. Los puntos de consigna
Max Phase Window y Dwell Time se encuentran en el menú de ajuste
Synchroscope (Sincroscopio) del EGCP-2.
Woodward 83
Page 90

Conjunto de control de generador y motor EGCP-2 Manual SP26086
En los grupos electrógenos de reserva para casos de emergencia, en los que se
necesita una sincronización rápida, lo normal es emplear una ventana de fase
máxima (Max Phase Window) mayor y un tiempo de parada (Dwell Time) menor.
Una ventana mayor y un tiempo de parada menor hacen que el sincronizador
sea menos sensible a las transiciones de frecuencia y de error de ángulo de
fase del generador en comparación con el bus al que se va a sincronizar el
generador. Cuando se cumplen todas las condiciones de tensión y fase, se
emite el comando de cierre del disyuntor.
En los sistemas generadores en los que se requiere una sincronización fluida y
precisa, y en los que el tiempo para sincronizar no es tan vital como en una
aplicación de reserva, se utilizaría una ventana de fase máxima menor y un
tiempo de parada mayor. Una ventana menor y un tiempo de parada mayor
requieren que el generador esté limitado a una tolerancia más estrecha de
frecuencia y de error de ángulo de fase en comparación con el bus al que se va
a sincronizar el generador. Cuando se cumplen todas las condiciones de tensión
y fase, se emite el comando de cierre del disyuntor.
Reconexión de impactos múltiples
La función de reconexión de impactos múltiples permite múltiples intentos de
cierre. El control ofrece puntos de consigna para el número de intentos de cierre
y para la temporización del retardo de reconexión. Si el cierre no se produce
cuando se llega al número de intentos establecido, el sincronizador se bloquea
adoptando el modo de desconexión automática y, si la alarma está activa,
excitando la salida del correspondiente relé de alarma. El sincronizador debe
entonces reiniciarse borrando la situación de alarma del registro de
alarmas/eventos (Alarm/Event Log). La función de reconexión de impactos
múltiples se desactiva fijando el valor uno en el cómputo de reconexiones.
Temporización del sincronizador
Los diagramas lineales de tiempos que figuran a continuación representan las
diversas secuencias de temporización que emplea la función sincronizador al
colocar en paralelo unidades sencillas y múltiples a lo largo del disyuntor del
generador o de la red (según la aplicación).
Detección y acción de Pérdida de red
El EGCP-2 puede configurarse para detectar una situación de pérdida de red
(Loss of Mains), y para responder a esa situación aislando la red de la carga, y
transfiriendo el suministro de alimentación a la carga desde la red hasta los
grupos electrógenos del motor situados en la central.
El EGCP-2 puede configurarse para operar con un sistema de unidad sencilla o
de unidades múltiples y no en paralelo o en paralelo a la red, que detecte una
pérdida de red. Las acciones por pérdida de red son una combinación de las
funciones de sincronización y control de carga del EGCP-2. Estas funciones
permiten a los controles EGCP-2 funcionar con eficacia en una situación de
pérdida de red.
A continuación figuran diagramas de temporización correspondientes a sistemas
en paralelo a la red y no en paralelo. Estas líneas temporales se refieren al
control maestro en sistemas de unidades múltiples o a cualquier aplicación de
unidad sencilla.
84 Woodward
Page 91

Manual SP26086 Conjunto de control de generador y motor EGCP-2
SYNCHRONIZER TIME LINE
STANDARD SEQUENCE:
PHASE AND VOLTAGE
MATCHING
SYNCHRONIZER
ACTIVATED
= SYNCH TIMEOUT PERIOD
SYNC TIMEOUT ACTIVE (>0 sec.)
C
D
B
W
E
H
L
O
L
L
D
T
I
M
T
I
E
M
E
BREAKER CLOSED
(CB AUX INPUT RECEIVED)
C
C
B
I
B
N
R
R
O
O
S
K
K
M
M
Y
R
R
M
M
N
C
C
A
A
C
L
L
N
N
H
O
O
D
D
.
S
S
R
I
E
E
S
E
S
M
U
O
E
V
D
E
D
UNIT ON LOAD
C
T
A
R
B
T
I
U
H
P
N
O
P
L
L
O
O
D
I
N
A
T
T
D
I
M
C
B
R
O
E
M
A
M
K
A
E
N
R
D
O
I
S
P
S
E
N
U
E
D
E
SYNCHRONIZER OFF
C
B
R
O
E
M
A
M
K
A
E
N
R
D
O
R
P
E
E
M
N
O
V
E
D
UNLOAD RAMP
TIME
U
(
S
N
B
Y
R
L
N
O
E
C
A
A
H
D
K
R
E
C
O
R
O
N
M
M
I
Z
O
M
E
D
A
R
E
N
)
I
D
N
I
O
S
P
S
E
U
N
E
D
WITH RECLOSE ATTEMPTS
PHASE AND VOLTAGE
MATCHING
SYNCHRONIZER
ACTIVATED
= SYNCH TIMEOUT PERIOD
: SYNCH TIMEOUT ACTIVE AND EXCEEDED
R
(
P
E
A
C
R
L
T
O
I
A
S
C
D
L
E
)
B
W
D
H
E
E
O
L
L
L
L
A
D
T
Y
I
M
T
I
E
M
E
SYNCHRONIZER OFF
TIMEOUT ALARM ACTIVE
A
B
B
I
N
S
Y
N
C
H
.
S
C
C
R
R
Y
O
O
N
K
K
M
M
R
R
C
M
M
H
C
C
A
A
L
L
T
N
N
O
O
I
D
D
M
S
S
E
R
I
E
E
S
O
E
S
M
U
U
T
O
E
D
V
E
X
E
D
C
E
E
D
E
D
S
L
Y
A
N
R
C
M
H
R
R
O
E
N
S
I
E
Z
T
E
R
A
C
T
I
V
E
PHASE AND VOLTAGE
MATCHING
Figura 5-4. Línea temporal del sincronizador — Secuencia estándar
Standard Sequence: Single No Parallel Unit in Auto with Loss Of Mains Detection Enabled.
LOM Action Delay Expires
LOM Action Delay Starts Mains Out of Spec*
020-100
00-04-27
Mains in Spec.
TIME
*Over/Under Frequency
and/or Over/Under
Voltage
Gen Stable Delay
Open Mains Breaker
Start Genset
Gen Stable. Start Fast
Transfer Delay
Fast Transfer
Delay
Genset On Load
Gen Breaker Closes
To Dead Bus
VIS-110
00-04-27
Mains Stable
Delay
Mains in Spec.
Fast Transfer
Open Gen Breaker
Delay
Mains In Spec and
Close Mains Breaker
Figura 5-5. Detección de pérdida de red activa
Woodward 85
On Load
Page 92

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Standard Sequence: Single Mains Parallel Unit in Auto with Loss Of Mains Detection Enabled.
LOM Action Delay Expires
LOM Action Delay Starts Mains Out of Spec*
Mains in Spec.
TIME
*Over/Under Frequency
and/or Over/Under
Voltage
Gen Stable Delay
Open Mains Breaker
Start Genset
Fast Transfer
Delay
Gen Stable. Start Fast
Transfer Delay
Genset On Load
Gen Breaker Closes
To Dead Bus
VIS-111
00-04-27
Mains Stable
Delay
Mains in Spec.
Generator
Unload Ramp
Synchronize and Close
Mains Breaker
Mains In Spec and
On Load
Open Gen. Breaker
Figura 5-6. Generador fuera de línea
Standard Sequence: Single Mains Parallel Unit Running On Load in Auto with Loss Of Mains
Detection Enabled.
LOM Action Delay Expires
LOM Action Delay Starts Mains Out of Spec*
Generator
Unload Ramp
Mains In Spec and
On Load
Mains in Spec.
Genset On Load
Mains Stable
Delay
Generator On Load
in Baseload or
Process Control Mode
Open Mains Breaker
Mains in Spec.
Synchronize and Close
Open Gen. Breaker
Mains Breaker
TIME
*Over/Under Frequency
and/or Over/Under
VIS-112
00-04-27
Voltage
Figura 5-7. Unidad en paralelo a la red con detección de tensión/frecuencia
86 Woodward
Page 93

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Standard Sequence: Single Mains Parallel Unit Running On Load in Auto with Loss Of Mains
Detection Enabled. Load Surge Event
Open Mains Breaker
Synchronize and Close
Mains Breaker
Generator
Unload Ramp
Mains In Spec and
On Load
Open Gen. Breaker
Mains in Spec.
Generator On Load
in Baseload or
Process Control Mode
TIME
* Load Surge detection is
immediate.
Load Surge Level
Exceeded*
Genset On Load
Mains Stable
Delay
Mains in Spec.
VIS-113
00-04-27
Figura 5-8. Unidad(es) en paralelo a la red con detección de aumento brusco de
carga
Secuencia del generador
Secuencia del generador es una función del control EGCP-2 destinada a
mantener la capacidad de un generador en línea en un determinada relación de
carga en kilovatios al configurar un sistema de unidades múltiples. Para activar
la función de secuencia automática del EGCP-2, cada unidad perteneciente al
sistema de unidades múltiples debe tener activados los siguientes puntos de
consigna de software:
Menú Configuration (Configuración):
Number of Units (Número de unidades) Automatic Sequencing (Secuencia automática)
Multiple (Múltiple) Enabled(Activado)
Toda unidad perteneciente al sistema deberá estar en modo Auto (entrada discreta nº 1
cerrada) para formar parte activa del sistema de secuencia.
Cuando está configurado para secuencia automática, la pantalla de estado
Sequencing (Secuencia) del EGCP-2 muestra todas las unidades activas en la
red operativa atendiendo a su Network Address (Dirección de red), y la prioridad
de dichas unidades en el conjunto de secuencia. Las unidades que no estén en
modo Auto, o que tengan configurado en el punto de consigna Number of Units
el valor Single (Sencilla), presentarán en la pantalla de estado Sequencing
(Secuencia) el mensaje “Manual Unit No Sequencing” (Unidad manual sin
secuencia). Las unidades que estén en modo Auto y configuradas para
funcionamiento como unidades múltiples (Multiple), pero que tengan desactivado
(Disabled) en el punto de consigna Auto Sequencing (Secuencia automática),
seguirán figurando en la pantalla de estado Sequencing, pero no responderán a
los comandos de secuencia automática que reciban de la unidad maestra
Woodward 87
(Master), y no serán capaces de operar en modo de control maestro.
Page 94

Conjunto de control de generador y motor EGCP-2 Manual SP26086
El EGCP-2 utiliza niveles calculados de carga del sistema para establecer los
momentos en los que la unidad maestra pone las unidades en secuencia en
línea o fuera de línea. La unidad maestra puede no poner una unidad en
secuencia fuera de carga, aunque esté por encima o por debajo del punto de
consigna de la carga mínima del generador, si ello hace que la carga del sistema
aumente hasta superar el punto de consigna de la carga máxima del generador.
A continuación se representa una rutina típica de secuencia automática. El
sistema que se representa está formado por tres unidades en un bus aislado
que alimenta diversas cargas de la central producidas por los generadores. La
unidad maestra (prioridad de red nº 1) dispone de los siguientes puntos de
consigna de secuencia en el menú de ajuste Real Load Control (Control de
carga real):
Max Gen Load (Carga máx. gen.) = 65%
Next Genset Delay (Retardo siguiente grupo elec.) = 30 segundos
Rated Load Delay (Retado de carga nominal) = 5 segundos
Max Start Time (Tiempo máx. de arranque) = 60 segundos
Min Gen Load (Carga mín. gen.) = 25%
Reduced Gen Dly. (Ret. reducido gen.) = 30 segundos
Max Stop Time (Tiempo máx. de parada) = 15 segundos
NOTA
Estos ajustes tienen únicamente carácter ilustrativo. Los puntos de
consigna de Sequencing pueden variar en función de las necesidades del
sistema.
100%
65%
SYSTEM
LOAD
25%
TIME
VIS-114
00-04-27
A
BCDEFG
HJ
K L M
Figura 5-9. Rutina típica de secuencia automática
Punto A
Generador maestro transportando carga isócronamente en un bus aislado.
Pasos de carga del sistema comprendidos entre 10% y 30% aproximadamente.
88 Woodward
Page 95

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Punto B
Generador maestro responde a un paso de carga que sitúa la carga del sistema
aproximadamente en el 70%. Este nivel sobrepasa el punto de consigna Max.
Gen Load (65%) del menú de ajuste Real Load Control (Control de carga real).
El control maestro empieza a contar el tiempo que corresponde al período de 30
segundos de Next Genset Delay. Una vez agotados los 30 segundos, la carga
sigue estando por encima del punto de consigna Max Gen Load. El control
maestro emite un comando de arranque hacia la siguiente unidad activada
(prioridad de red nº 2).
Punto C
Diez segundos después de recibir su comando de arranque, la unidad con la
prioridad de red nº 2 se cierra al bus y cambia progresivamente a
compartimiento de carga con la unidad maestra.
Punto D
Los niveles de carga del sistema descienden aproximadamente hasta el 45%
una vez que la unidad nº 2 ha terminado de cambiar progresivamente a
compartimiento de carga.
Punto E
Un paso de carga muy grande en el bus carga ambos generadores por encima
del 100% de su carga nominal. La carga del sistema refleja estos niveles. La
unidad maestra empieza a contar el tiempo del retardo Rated Load Delay (5
segundos) antes de arrancar la tercera unidad.
Punto F
La tercera unidad cierra su disyuntor a las dos unidades que ya se encuentran
en el bus aislado. Dado que el retardo de carga nominal está vigente y que la
carga del sistema es superior al 100% de la capacidad de generación en línea,
la tercera unidad se pone inmediatamente en compartimiento de carga, sin
ningún cambio progresivo de carga. La carga del sistema desciende de
inmediato hasta aproximadamente el 55% cuando la tercera unidad cierra su
disyuntor al bus.
Punto G
Una disminución del paso de carga en el bus reduce la carga del sistema y la
sitúa aproximadamente en el 35%. Los tres generadores permanecen en línea
en compartimiento isócrono de carga.
Punto H
Otra disminución del paso de carga en el bus aislado reduce la carga del
sistema y la sitúa por debajo del punto de consigna Min Gen Load, haciéndola
disminuir del 25% al 10% aproximadamente. La unidad maestra empieza a
contar el tiempo que corresponde al período de 30 segundos de Reduced Gen
Dly.
Punto J
Dado que la carga del sistema sigue siendo inferior al 25%, y que se ha agotado
el período del temporizador Reduced Gen Dly de la unidad principal. La unidad
maestra emite un comando hacia la Unidad 3 (prioridad de red 3) para que se
ponga fuera de carga y abra su disyuntor del generador. La Unidad 3 empieza a
ponerse progresivamente fuera de carga. La carga del sistema empieza a
aumentar. La unidad maestra inicia su retardo de 15 segundos de Max Stop
Time antes de comprobar si la carga del sistema es lo bastante baja para poder
poner en secuencia fuera de línea otra unidad.
Woodward 89
Page 96

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Punto K
La Unidad 2 alcanza su punto de disparo de descarga y abre su disyuntor del
generador. La carga del sistema sigue siendo inferior al 25% del punto de
consigna Min Gen Load. El retardo de Max Stop Time de la unidad maestra se
ha agotado. La unidad maestra empieza a contar el tiempo que corresponde al
tiempo de retardo de Next Gen Off.
Punto L
La carga del sistema permanece por debajo del 25%, y la unidad maestra emite
un comando hacia la unidad nº 2 (prioridad de red nº 2) para que se ponga fuera
de carga.
Punto M
La Unidad 2 se pone progresivamente fuera de carga y abre su disyuntor del
generador. Esto deja la unidad maestra (prioridad de red nº 1) en línea
suministrando la carga. Cuando se necesite, la unidad maestra pondrá unidades
en secuencia en línea y fuera de línea tal como se ha explicado anteriormente y
en función de los puntos de consigna de Sequencing que figuran en su menú de
ajuste Real Load Control (Control de carga real).
La unidad maestra (Master) de cualquier sistema EGCP-2 de unidades múltiples
es siempre la unidad que tiene el valor más bajo en Network Priority. Todas las
unidades esclavas se ponen en secuencia en línea por orden ascendente de sus
valores de prioridad en Network Priority, y se ponen en secuencia fuera de línea
por orden descendente de sus valores en Network Priority. La unidad maestra
siempre es responsable de la secuencia automática con la que las unidades
esclavas se ponen en línea y fuera de línea.
Para dar al usuario final del EGCP-2 la posibilidad de controlar los niveles de
tiempo de funcionamiento del motor en un sistema de unidades múltiples, todo
EGCP-2 perteneciente al sistema puede utilizarse para cambiar la prioridad de
red de cualquiera de las unidades EGCP-2 que están activas en la misma red.
Para que una unidad esté activa en la red, debe tener cerrada su entrada
discreta Auto, estar configurada para funcionamiento como unidad múltiple
(Multiple Unit), tener activado (Enabled) su punto de consigna de secuencia
automática (Auto Sequencing) y estar conectada físicamente a la red RS-485
que engloba las diversas unidades.
La posibilidad de cambiar la prioridad de cualquier unidad de la red se rige por
varias reglas fundamentales. Estas reglas tienen que ver con adoptar una nueva
unidad maestra, cambiar la secuencia de las unidades en carga y autorizar
estados de cambio de secuencia.
Asunción de una nueva unidad maestra – Todas las unidades
fuera de carga
Cuando la prioridad de una unidad se cambia al efecto de convertir ésta en la
nueva unidad maestra del sistema, la respuesta del sistema al cambio de unidad
maestra depende del estado de funcionamiento del sistema en el momento en
que tiene lugar el cambio.
Si el sistema no está en carga y los motores no están en funcionamiento, y si el
control no ha experimentado ni está configurado para una situación de pérdida
de red, cambiar la prioridad de la unidad maestra afectará al sistema de la
siguiente manera:
Transcurrido 5 minutos como máximo, en la indicación Master de la pantalla de
estado Sequencing figurará la nueva unidad maestra.
90 Woodward
Page 97

Manual SP26086 Conjunto de control de generador y motor EGCP-2
Poco después, en la pantalla de estado Sequencing de la nueva unidad maestra
se reordenarán las unidades esclavas Next On (siguiente activada) y Next Off
(siguiente desactivada) para ajustar la nueva configuración de prioridad del
sistema.
A consecuencia de la asunción de la nueva unidad maestra, en estas
condiciones ninguna unidad arrancará ni se pondrá en carga. Consulte la figura
5-10.
MAINS
NO MAINS FAILURE DETECTED
MASTER SEQUENCING SCREEN
ADDRESS: 1 2 3
OPER.
PRIORITY 1 2 3
MASTER 1
NEXT ON ALL
NEXT OFF
VIS-115
00-04-27
G G
SYSTEM LOAD = %
ALL GENERATORS OFF LOAD
G
NETWORK ADDRESS #1
NETWORK PRIORITY #1
NETWORK ADDRESS #2
NETWORK PRIORITY #2
NETWORK ADDRESS #3
NETWORK PRIORITY #3
Figura 5-10. Configuración inicial del sistema
MAINS
NO MAINS FAILURE DETECTED
MASTER SEQUENCING SCREEN
ADDRESS: 1 2 3
OPER.
PRIORITY 2 1 3
MASTER 2
NEXT ON ALL
NEXT OFF
VIS-116
00-04-27
G G
NETWORK ADDRESS #1
NETWORK PRIORITY #2
Figura 5-11. Tras un cambio de prioridad las unidades no funcionan
SYSTEM LOAD = 0%
NETWORK ADDRESS #2
NETWORK PRIORITY #1
G
NETWORK ADDRESS #3
NETWORK PRIORITY #3
ALL GENERATORS OFF LOAD
Woodward 91
Page 98

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Asunción de una nueva unidad maestra – Unidad maestra en
carga
El siguiente escenario de cambio de prioridad de secuencia implica tener la
unidad maestra en el bus aislado debido a una situación de pérdida de red, o
desde una entrada Auto y Run with Load. Las dos unidades esclavas están
fuera de línea porque la carga del sistema no requiere que se pongan en
secuencia en línea. Al cambiar la prioridad de red de la unidad maestra en el
sistema se establece una nueva unidad maestra.
En este sistema, la unidad maestra siempre tendrá un valor del 25% en Min Gen
Load y del 65% en Max Gen Load. Estos valores se utilizarán en los demás
ejemplos de generador en carga.
MAINS
MAINS FAILURE DETECTED
Or Run With Load and No
Parallel Application
MASTER SEQUENCING SCREEN
ADDRESS: 1 2 3
OPER. X
PRIORITY 1 2 3
MASTER 1
NEXT ON 2
NEXT OFF
SYSTEM LOAD = 40%
VIS-117
00-04-27
G G
NETWORK ADDRESS #1
NETWORK PRIORITY #1
NETWORK ADDRESS #2
NETWORK PRIORITY #2
G
NETWORK ADDRESS #3
NETWORK PRIORITY #3
Figura 5-12. Configuración inicial del sistema
En un plazo de 5 minutos la pantalla Sequencing de cualquier unidad reflejará el
cambio de unidad maestra, que ha pasado de ser la unidad 1 a ser la unidad 2.
La carga del sistema se encuentra en un nivel comprendido entre el 25 y el 65%,
nivel al que ninguna unidad esclava se pone en secuencia en línea o fuera de
línea.
Cuando la pantalla de secuencia indica la nueva unidad maestra, el nuevo motor
maestro inicia su secuencia de arranque. La nueva unidad maestra debe
arrancar y ponerse en línea para poder asumir su nuevo papel de unidad
maestra, lo que significa tener el control de la carga y de la secuencia de las
unidades esclavas.
La nueva unidad maestra (Dirección de red 2) arranca y se pone en paralelo a la
anterior unidad maestra (Dirección de red 1). El control de carga operará en
compartimiento isócrono de carga entre las dos unidades. Consulte la figura
5-13. Si la carga del sistema es superior al 25%, ambas unidades permanecen
en línea. Si la carga del sistema desciende por debajo del 25%, la nueva unidad
maestra (Dirección de red 2) pondrá la unidad esclava (Dirección de red 1) en
secuencia fuera de línea.
La nueva unidad maestra se ha implantado totalmente como unidad maestra en
la red.
92 Woodward
Page 99

Manual SP26086 Conjunto de control de generador y motor EGCP-2
MAINS
MAINS FAILURE DETECTED
Or Run With Load and No Parallel
Application
MASTER SEQUENCING SCREEN
ADDRESS: 1 2 3
OPER. X X
PRIORITY 2 1 3
MASTER 2
NEXT ON 3
NEXT OFF 1
VIS-118
00-04-27
SYSTEM LOAD = 35%
G G
NETWORK ADDRESS #1
NETWORK PRIORITY #2
NETWORK ADDRESS #2
NETWORK PRIORITY #1
G
NETWORK ADDRESS #3
NETWORK PRIORITY #3
Figura 5-13. Una nueva unidad maestra toma el control — Unidad sencilla
funcionando en el bus aislado
Las acciones siguientes tienen lugar cambiando simplemente la prioridad de una
determinada unidad a fin de convertir esa unidad en la nueva unidad maestra.
Mientras la unidad permanezca en modo Auto, esté configurada para
funcionamiento con unidades múltiples y esté conectada a la red, se transferirá
automáticamente a la posición de unidad maestra (Master Position).
Las unidades que operan en Auto con la entrada discreta Run with Load cerrada
transferirán efectivamente o reconocerán la transferencia de unidades maestras.
Sin embargo, estando en un modo Auto y Run with Load, el control maestro no
podrá poner esas unidades concretas en secuencia fuera de línea.
Si una unidad no está en modo Auto o está configurada para funcionamiento
como unidad sencilla, o no está conectada a la red RS-485, no se produce
transferencia de la unidad maestra.
Asimismo, para que se produzca una transferencia de la unidad maestra, las
unidades tienen que estar en modo de secuencia automática. Esto implica
control de carga en modo de compartimiento de carga o en modo de proceso.
Sin estar en estos modos de funcionamiento, la transferencia de unidad maestra
no puede producirse porque la nueva unidad maestra no puede poner en
secuencia fuera de línea la unidad maestra anterior. El modo de control de carga
que no admite la transición de la nueva unidad maestra es el modo Base Load
(Carga base). En el modo Base Load, no se produce secuencia entre unidades,
y por tanto no puede producirse un cambio de unidad maestra hasta que las
unidades se retiran del modo de carga base o se conmutan a un modo de
control de compartimiento isócrono de carga o de proceso.
NOTA
NOTA: Los controles maestros que operan modo de control de proceso
(Process Control Mode) deben tener, para funcionar correctamente, una
entrada de transductor de 4–20 mA o 1–5 Vcc.
Woodward 93
Page 100

Conjunto de control de generador y motor EGCP-2 Manual SP26086
Cambio de prioridad de una unidad esclava – Ninguna unidad
esclava en carga
MAINS
NO MAINS FAILURE DETECTED
MASTER SEQUENCING SCREEN
ADDRESS: 1 2 3
OPER.
PRIORITY 1 2 3
MASTER 1
NEXT ON ALL
NEXT OFF
VIS-119
00-04-27
G G
SYSTEM LOAD = 0%
ALL GENERATORS OFF LOAD
G
NETWORK ADDRESS #1
NETWORK PRIORITY #1
NETWORK ADDRESS #2
NETWORK PRIORITY #2
NETWORK ADDRESS #3
NETWORK PRIORITY #3
Figura 5-14. Cambio de prioridad de una unidad esclava
Si la prioridad de una unidad esclava se cambia de tal modo que únicamente se
altera el puesto de esa unidad esclava en el plan de secuencia, sin convertir la
unidad esclava en la nueva unidad maestra, entonces puede suceder una de
dos cosas en función del puesto de esa unidad esclava en el orden de
prioridades.
1) La unidad esclava simplemente ocupará su puesto en el nuevo orden de
secuencia sin tener que ponerse en carga.
2) La unidad esclava tendrá que ponerse en carga para asumir correctamente
su nuevo valor de prioridad en el sistema de secuencia.
El caso 1 se produce si la prioridad de la unidad esclava se cambia cuando no
hay ninguna unidad en funcionamiento o no se ha producido ninguna detección
de Pérdida de red, o si la propia unidad esclava no funciona debido a niveles de
carga del sistema que no exigen que la unidad esté en línea, y la prioridad de la
unidad esclava disminuye (recibe un valor numérico más alto).
MAINS
MAINS FAILURE DETECTED
OR RUN WITH LOAD AT MASTER
MASTER SEQUENCING SCREEN
ADDRESS: 1 2 3
OPER. X
PRIORITY 1 2 3
MASTER 1
NEXT ON 2
NEXT OFF 3
VIS-120
00-04-27
G
NETWORK ADDRESS #1
NETWORK PRIORITY #1
SYSTEM LOAD = 50%
G
NETWORK ADDRESS #2
NETWORK PRIORITY #2
G
NETWORK ADDRESS #3
NETWORK PRIORITY #3
Figura 5-15. Cambio de prioridad de una unidad esclava
94 Woodward
 Loading...
Loading...