

Page 1
DC 5V Stepper Motor 28BYJ-48
Sehr geehrter Kunde,
vielen Dank, dass Sie sich für unser Produktentschieden haben.
Im Folgenden haben wir aufgelistet, was bei der Inbetriebnahme zu beachten ist:
Verwendung mit einem Arduino
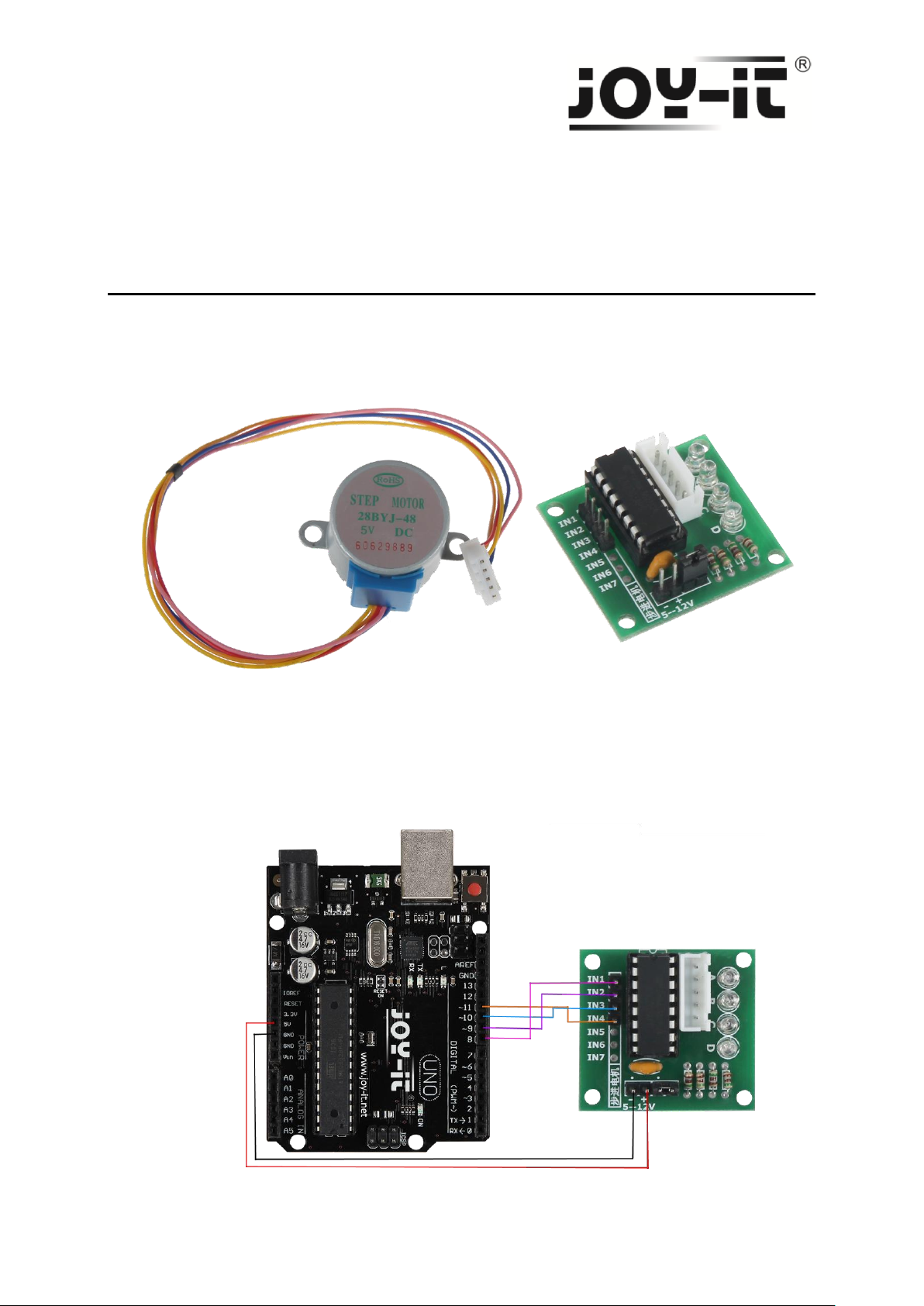
Schritt 1 – Anschließen des Motors
Bild 1: 28BYJ-48 mit Treiber-Board
Schließen Sie den Schrittmotor an den auf dem Treiberboard vorgesehen Anschluss an.
Schließen Sie das das Board, wie im folgenden Bild 2, bzw. in der folgenden Tabelle 1, zu sehen, an
die PINs des Arduinos an.
Bild 2: Verkabelung mit Arduino
Copyright © JOY-IT®
Page 2
Arduino PIN
Treiber-Board PIN
+5V
+
GND - 8
INT1
9
INT2
10
INT3
11
INT4
Tabelle 1: PIN-Verbindung zwischen Arduino und Treiber-Board
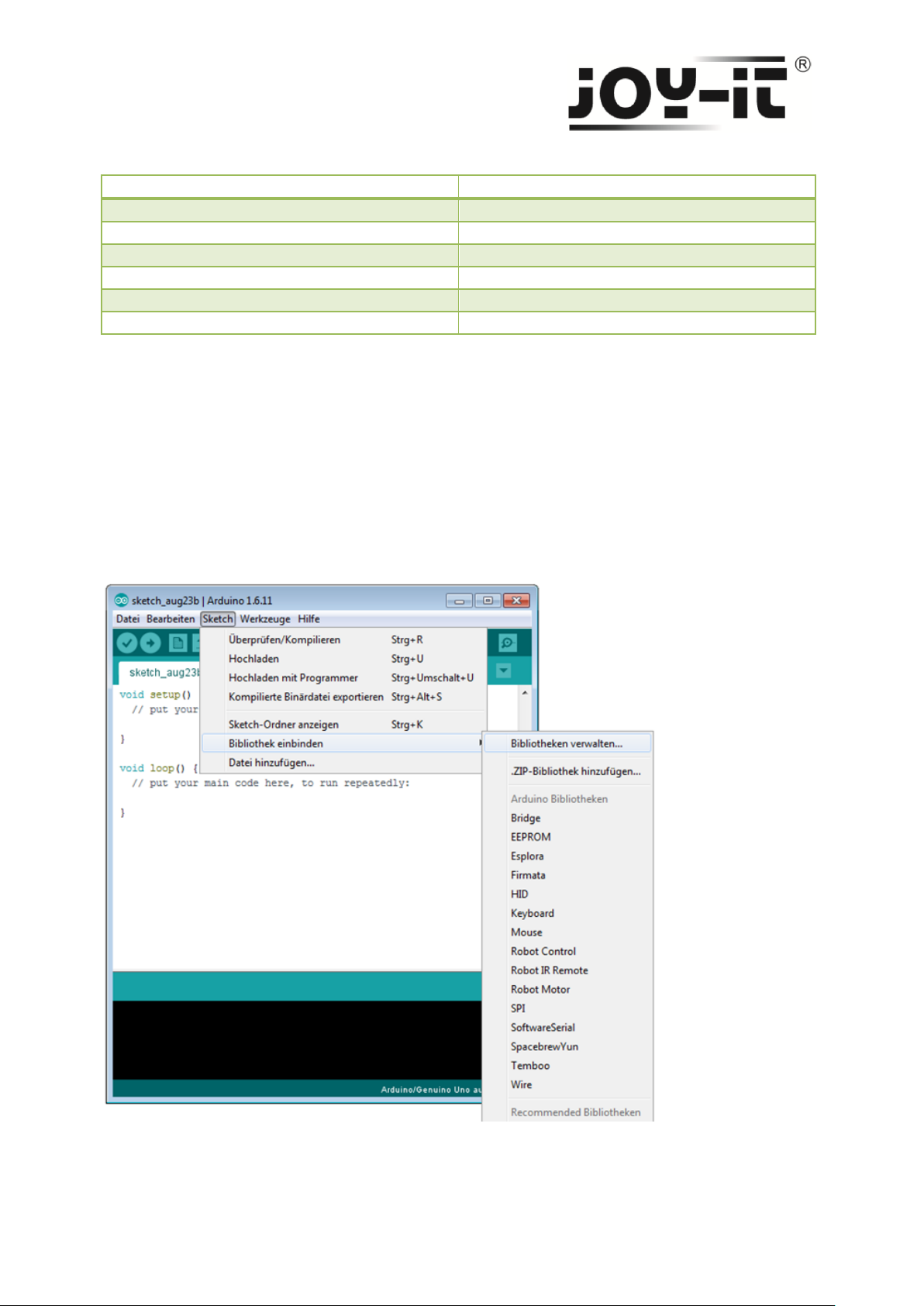
Schritt 2 – Installation der Bibliothek
Bevor Sie den unten befindlichen Quellcode auf Ihren Arduino übertragen, muss zunächst die
CheapStepper Bibliothek hinzugefügt werden.
Dazu klicken Sie bitte, wie in Bild 3 zu sehen, auf Sketch Bibliothek einbinden Bibliotheken
verwalten.
Bild 3: Bibliothekverwaltung im Arduino-Sketch
Copyright © JOY-IT®
Page 3
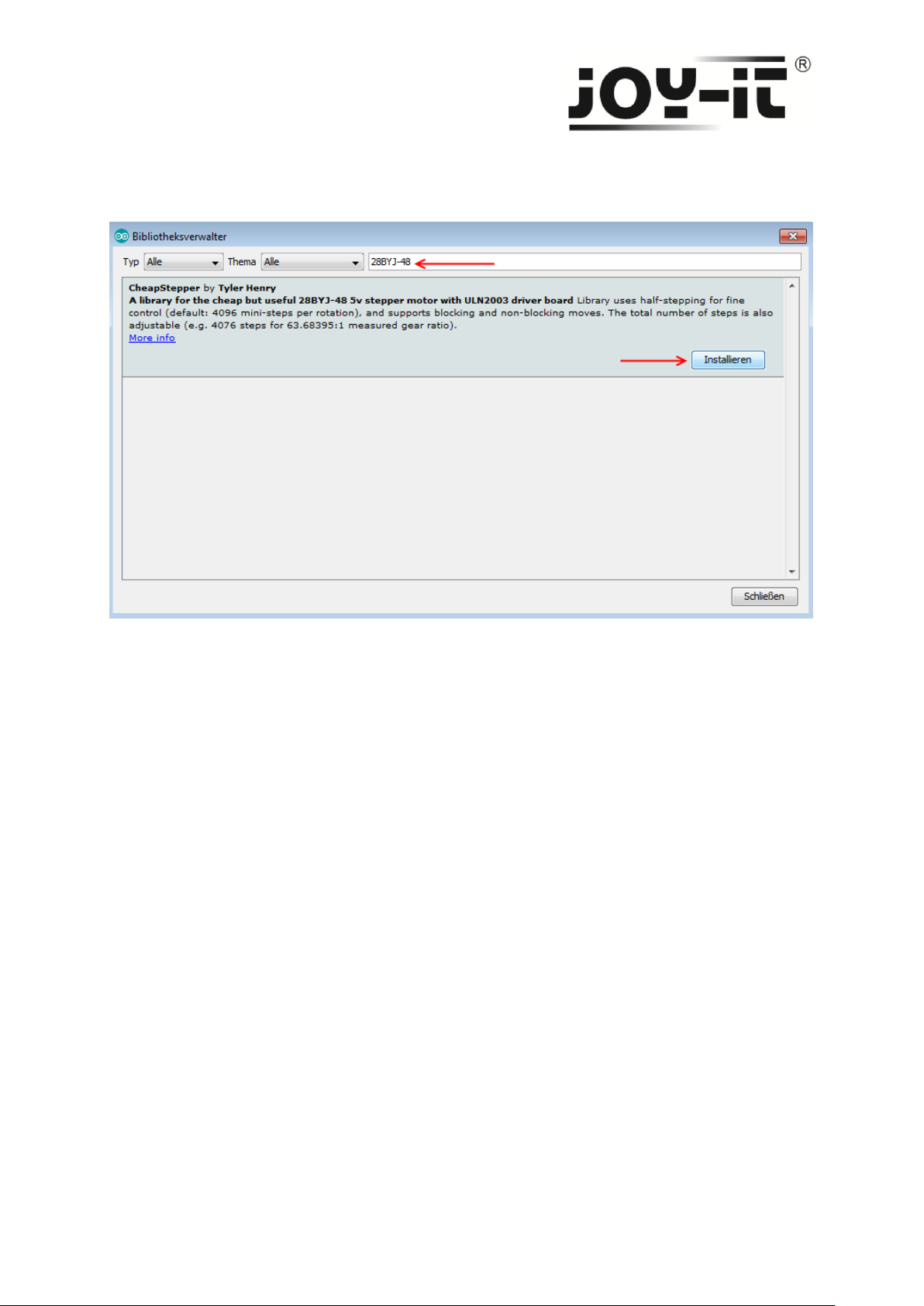
Im sich darauf öffnenden Bibliotheksverwalter suchen Sie unter dem Suchbegriff 28BYJ-48 die
CheapStepper Bibliothek und installieren diese.
Bild 4: Installation der CheapStepper Bibliothek
Copyright © JOY-IT®
Page 4

#include <CheapStepper.h>
CheapStepper stepper;
//Richtungszuweisung des Motors
boolean moveClockwise = true;
void setup()
{
Serial.begin(9600);
Serial.println("28BYJ-48 bereit.");
}
void loop()
{
for (int s=0; s<4096; s++){
//Eine volle Umdrehung beinhaltet 4096 Schritte
stepper.step(moveClockwise);
//Ausgabe der aktuellen Motorposition in der Konsole
int nStep = stepper.getStep();
if (nStep%64==0)
{
Serial.print("current step position: "); Serial.print(nStep);
Serial.println();
}
}
delay(1000);
//Richtungswechsel nach vollständiger Umdrehung
moveClockwise = !moveClockwise;
}
Schritt 3 – Installation des Motors
Mit folgendem Codebeispiel, können Sie den Motor mit einem Arduino verwenden.
In diesem Beispiel rotiert der Motor wiederholend zuerst eine volle Umdrehung in die eine Richtung
und danach eine volle Umdrehung in die andere Richtung.
Das Beispiel kann, je nach Verwendungszweck, von Ihnen an ihre Wünsche angepasst werden.
Code 1: Arduino Quellcode
Copyright © JOY-IT®
Page 5

Verwendung mit einem Raspberry Pi
Schritt 1 – Anschließen des Motors
Schließen Sie den Schrittmotor an den auf dem Treiberboard vorgesehen Anschluss an.
Schließen Sie das das Board, wie im folgenden Bild 5, bzw. in der folgenden Tabelle 2, zu sehen, an
die PINs des Raspberry Pis an.
Bild 5: Verkabelung mit Raspberry Pi
Copyright © JOY-IT®
Page 6

Raspberry Pi PIN
Treiber-Board PIN
PIN 12 (BCM 18)
IN1
PIN 16 (BCM 23)
IN2
PIN 18 (BCM 24)
IN3
PIN 22 (BCM 25)
IN4
PIN 4 (5v Power)
+
PIN 6 (Ground)
-
Tabelle 2: PIN-Verbindung zwischen Rasperry Pi und Treiber-Board
Schritt 2 – Installation der Software
Sollten Sie bereits ein aktuelles Raspbian-System auf Ihrem Raspberry verwenden, so können Sie
diesen Schritt überspringen und sofort mit Schritt 3 fortfahren.
Installieren Sie auf Ihre SD-Karte mit Hilfe des „Win32 Disk Imager“-Programms das aktuelle Raspbian
Image, welches Sie unter dem folgenden Link zum Download finden.
Bild 6: Screenshot des Win32 Disk Imagers
Copyright © JOY-IT®
Page 7

sudo apt-get install python-pip python-dev build-essential
sudo pip install RPi.GPIO
sudo apt-get install python-imaging
Schritt 3 – Aktivierung des SPI-Moduls
sudo nano motor.py
Sobald Sie die Installation abgeschlossen und das System gestartet haben, öffnen Sie die TerminalKonsole und führen Sie folgendes Kommando aus:
Code 2: Installation der GPIO Bibliothek
Code 3: Installation der Python Bibliothek
Schritt 4 – Installation des Motors
Mit folgendem Codebeispiel, können Sie den Motor mit einem Raspberry Pi verwenden.
In diesem Beispiel rotiert der Motor eine vollständige Umdrehung.
Das Beispiel kann, je nach Verwendungszweck, von Ihnen an ihre Wünsche angepasst werden.
Öffnen Sie zum Erstellen des Codebeispiels das Terminal und erstellen Sie eine neue Datei:
Code 3: Quellcode-Datei erstellen
Copyright © JOY-IT®
Page 8

Geben Sie den nun geöffneten Editor folgende Quellcode Teile.
from time import sleep
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
# PIN-Zuweisung am Raspberry
A=18
B=23
C=24
D=25
time = 0.001
# PINS definieren
GPIO.setup(A,GPIO.OUT)
GPIO.setup(B,GPIO.OUT)
GPIO.setup(C,GPIO.OUT)
GPIO.setup(D,GPIO.OUT)
GPIO.output(A, False)
GPIO.output(B, False)
GPIO.output(C, False)
GPIO.output(D, False)
# Ansteuerung der Spulen des Motors
def Step1():
GPIO.output(D, True)
sleep (time)
GPIO.output(D, False)
def Step2():
GPIO.output(D, True)
GPIO.output(C, True)
sleep (time)
GPIO.output(D, False)
GPIO.output(C, False)
Sie können Ihre Datei mit Strg+O speichern und mit Strg+X verlassen.
Code 4: Teil 1 des Quellcodes
Copyright © JOY-IT®
Page 9

def Step4():
GPIO.output(B, True)
GPIO.output(C, True)
sleep (time)
GPIO.output(B, False)
GPIO.output(C, False)
def Step5():
GPIO.output(B, True)
sleep (time)
GPIO.output(B, False)
def Step6():
GPIO.output(A, True)
GPIO.output(B, True)
sleep (time)
GPIO.output(A, False)
GPIO.output(B, False)
def Step7():
GPIO.output(A, True)
sleep (time)
GPIO.output(A, False)
def Step8():
GPIO.output(D, True)
GPIO.output(A, True)
sleep (time)
GPIO.output(D, False)
GPIO.output(A, False)
# Eine komplette Umdrehung starten
for i in range (512):
Step1()
Step2()
Step3()
Step4()
Step5()
Step6()
Step7()
Step8()
GPIO.cleanup()
Code 5: Teil 2 des Quellcodes
Copyright © JOY-IT®
Page 10

sudo python motor.py
Nachdem Sie den Quellcode gespeichert und den Editor verlassen haben, können Sie Ihren Code mit
folgendem Befehl starten:
Code 6: Ausführen des Motor-Codes
Copyright © JOY-IT®
 Loading...
Loading...