

3
3
Motorino
Ausgabe 26.01.2017 Copyright by Joy-IT 1

3
Index
1. Einführung
2. Technische Daten & Sicherheitshinweise
3. Einrichtung des Arduinos
4. Installaon des Moduls
5. Einrichten der I2C-Adresse
Motorino
Ausgabe 26.01.2017 Copyright by Joy-IT 2
Sehr geehrter Kunde,
vielen Dank, dass Sie sich für unser Produkt entschieden haben. Im Folgenden haben wir aufgelistet, was bei der
Inbetriebnahme zu beachten ist:
1. Einführung
Die Motorino Plane ist eine Erweiterungsplane zur Ansteuerung und Verwendung von bis zu 16 PWMgesteuerten 5V-Servomotoren. Die Plane kann zusätzlich mit einer Spannung von 4,8V - 6V versorgt werden, sodass eine opmale Versorgung der Motoren stets gewährleistet ist und somit auch größere Projekte mit ausreichend Strom beliefert werden können.
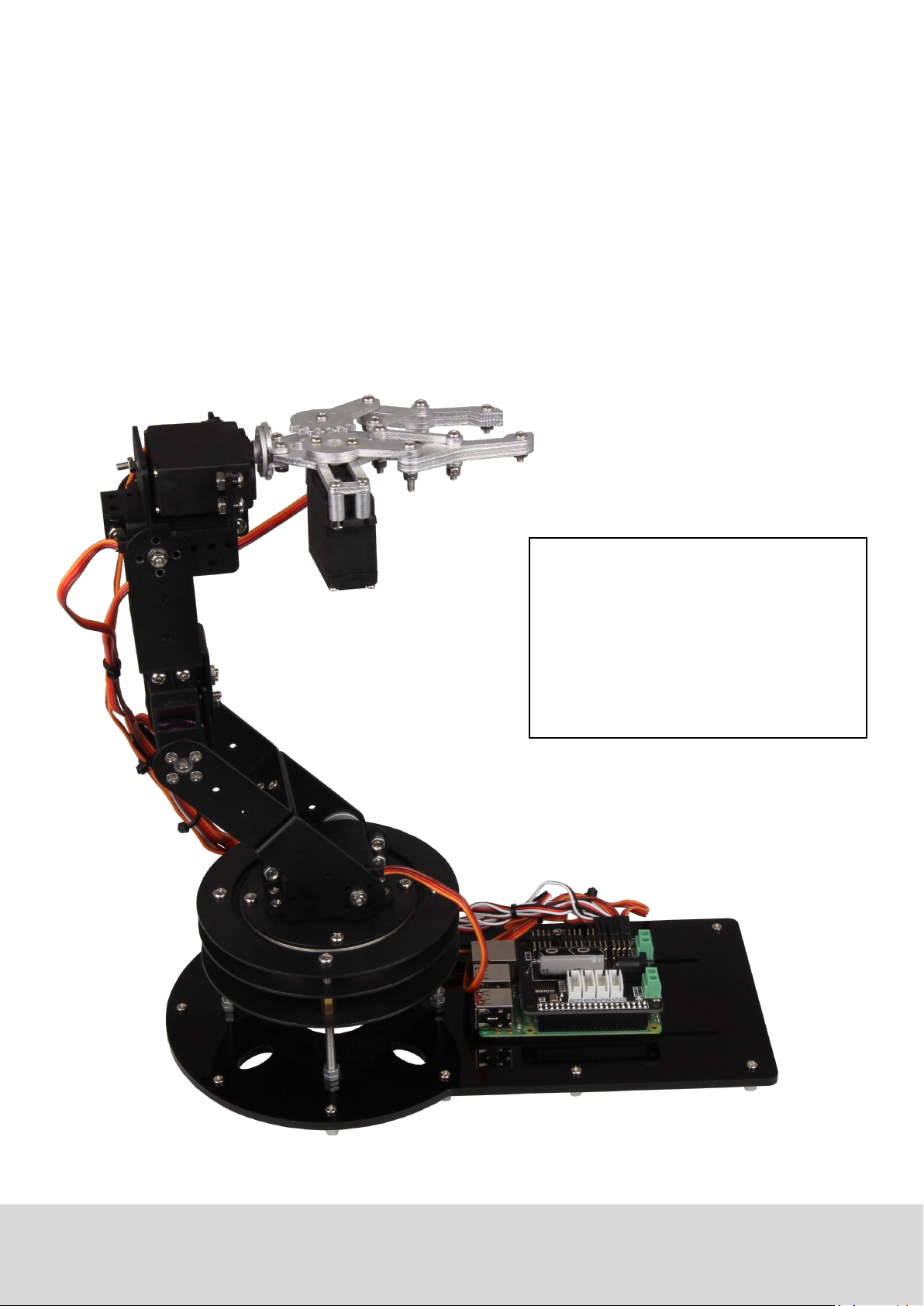
ART-Nr.: Robot02
hochwerger Roboter Arm aus Aluminium
mit gelagerten Drehteller und Aufnahme für
Motorsteuerungen / Einplanencomputer.
Angetrieben durch 6 Stück 20 Kilo Digital
Servomotoren.
Abb. 1: Robot02
Ausgabe 26.01.2017 Copyright by Joy-IT 3

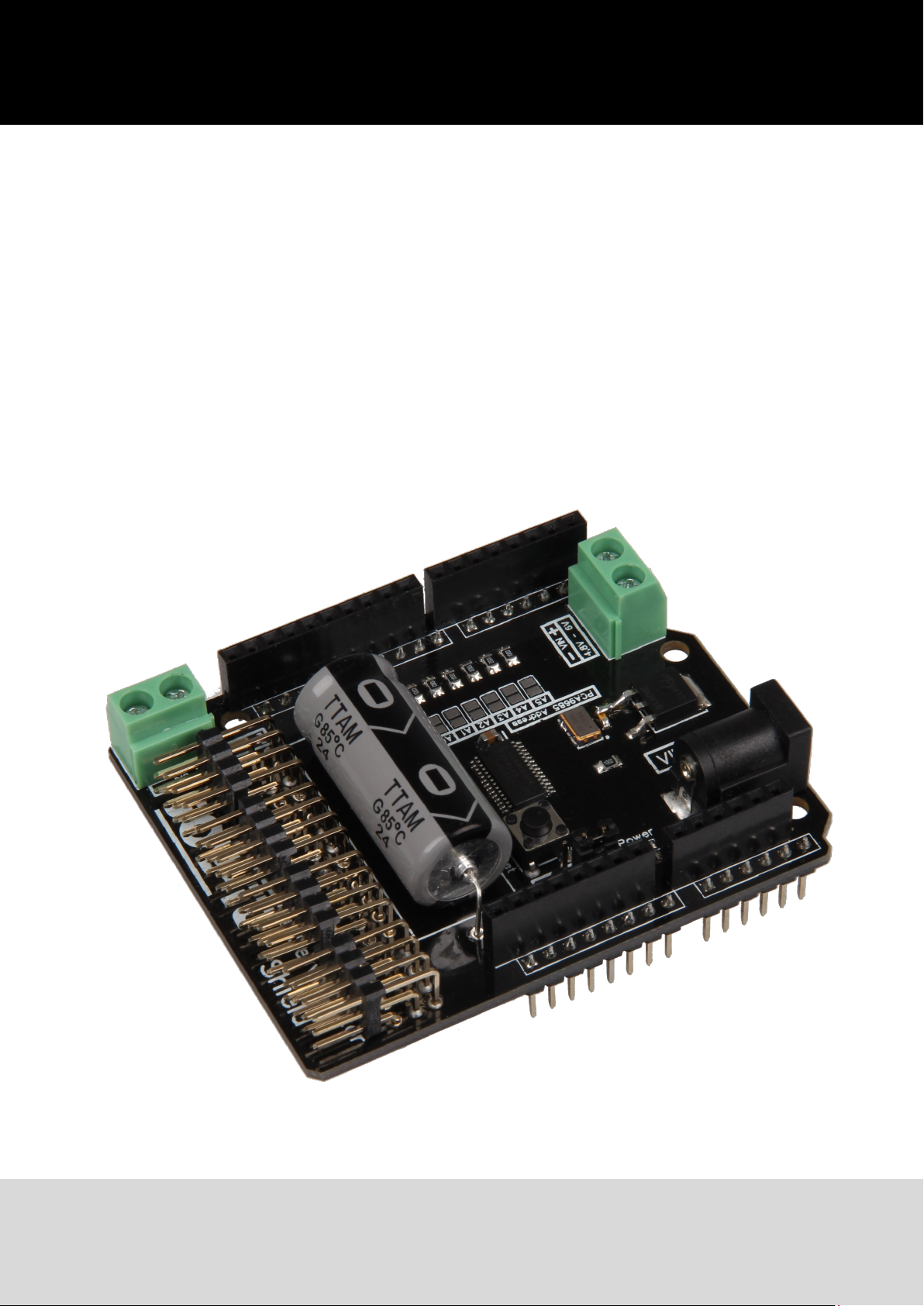
2. Technische Daten und Sicherheitshinweise
Die Motorinoi-Erweiterungsplane ist ausgestaet mit 16 Kanälen für 5V-Servomotoren, sowie mit einer
Anschlussmöglichkeit für einen zusätzlichen Kondensator.
Die Stromversorgung erfolgt, wahlweise, über einen 5V Hohlstecker oder über eine Spannungsversorgung
zwischen 4,8V und 6V.
Die Motorino-Plane ist außerdem mit einem zusätzlichen Quarzoszillator ausgestaet, um die
Frequenzen so präzise wie möglich und die Abweichungen möglichst gering zu halten.
Abb. 2: Planenbeschreibung
Anschluss für zusätzlichen Kondensator Channel 0-16
4,8V-6V Spannungsversorgung 5V-DC IN
Ausgabe 26.01.2017 Copyright by Joy-IT 4
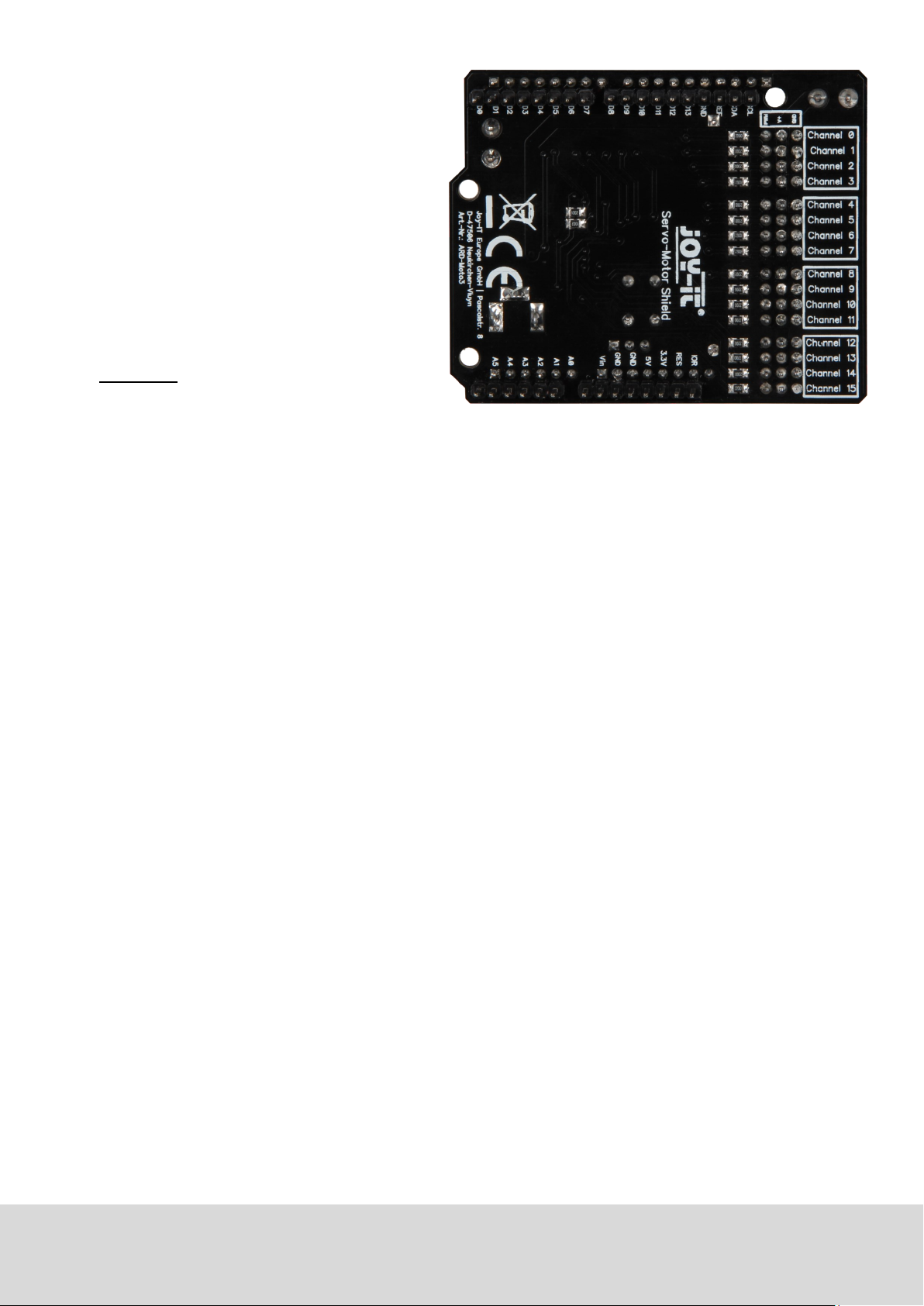
Auf der Unterseite der Plane können die
Channelnummerierungen abgelesen werden.
Die 3 PINs des jeweiligen Channels sind, von unten
nach oben gesehen, für den Anschluss der
Masseleitung, der Spannungsleitung und der
Signalleitung [GND| V+ | PWM].
Stecken Sie die Plane einfach auf die PINs Ihres
Arduinos auf und die Kabel Ihrer
5V-Servomotoren an die Channel-PINs.
Eine zusätzliche Spannungsversorgung über ein
Kabel oder einen 5V Hohlstecker ist für den Betrieb zwingend erforderlich.
Um plötzlichen Spannungsabfällen vorzubeugen
ist auf der Plane bereits ein Kondensator angebracht.
Sollte dies jedoch in speziellen Ausnahmefällen nicht
genügen, so kann ein weiterer Kondensator über den
dafür vorgesehenen Anschluss parallel geschaltet
werden.
Abb. 3: Planenrückseite
Das von Ihnen eingesetzte Netzteil muss auf die angeschlossenen Motoren von der Leistung her abgesmmt sein, zu schwach dimensionierte Netzteile erkennt man häug da dran, das die Motoren ruckeln
sta eine ießende Bewegung durchzuführen.
Wir empfehlen die Verwendung unseres 4.8A Netzteil RB-Netzteil2 das 24W Dauerleistung zur Verfügung
stellt.
Nach dem Aufstecken der Erweiterungsplane auf den Arduino, dem Anschließen einer zusätzlichen
Stromversorgung und dem Anschließen von Servomotoren, ist die Plane einsatzbereit.
Sicherheitshinweis:
Um eine Verpolung zu vermeiden, beachten Sie bie die auf der Plane angebrachten Kennzeichnungen
der jeweiligen Eingänge (+ und - Symbol).
Eine Verpolung kann zu Schäden an der Plane, dem angeschlossenen Arduino und weiterer
Peripherie führen!
Die von Ihnen angeschlossenen Motoren, und die durch sie erzeugte Bewegung,
können eine Gefahr darstellen.
Wir empfehlen daher ausreichenden Sicherheitsabstand zu halten bzw. Maßnahmen zu treen,
damit niemand mit bewegten Teilen in Berührung kommen kann.
Dies gilt insbesondere für Kinder.
Ausgabe 26.01.2017 Copyright by Joy-IT 5

3. Einrichtung des Arduinos
Nach dem Aufstecken der Erweiterungsplane auf den Arduino Uno, dem Anschließen der externen
Stromversorgung und dem Anschließen von Servomotoren, ist die Plane einsatzbereit.
Hier kann entweder ein 5V Hohlstecker verwendet, oder eine Spannung zwischen 4,8V und 6V
an den dafür vorgesehenen Eingang angelegt werden.
Das Sowarebeispiel aus Kapitel 4 zeigt die grundlegende Funkon und Verwendung der Servomotoren
am Motorino.
Es können Servomotoren an einem beliebigen Channel angeschlossen werden.
Das Beispiel steuert nacheinander jeden Channel einmal an und wird den voll-ständigen Bewegungsradius
des Servomotors ausnutzen.
Selbstverständlich können Sie das Beispiel an Ihren Zweck und Ihre Bedürfnisse anpassen und verändern.
Laden Sie den Beispielcode vollständig auf Ihren Arduino hoch.
Beachten Sie bie, dass zunächst erst die notwendigen Zusatzbibliotheken in ihre
Arduino-Bibliotheksverwaltung geladen werden muss.
Die notwendigen Schrie können Sie nachfolgenden entnehmen.
Beachten Sie bie, dass zur Verwendung unseres Beispiels, die Zusatzbibliothek Wire aus der
Bibliothekendatenbank heruntergeladen werden muss.
Da unsere Motorino-Plane mit einem zusätzlichen Quarzoszillator ausgestaet ist, ist noch eine
besondere Bibliothek erforderlich.
Diese basiert auf der Adafruit-PWM-Servo-Driver-Library, wurde von uns aber speziell an unsere Plane
angepasst.
Wir empfehlen unbedingt ausschließlich unsere modizierte Bibliothek zu verwenden.
Diese Bibliothek können Sie hier herunterladen.
Ausgabe 26.01.2017 Copyright by Joy-IT 6

Zur Installaon der Wire Bibliothek, önen Sie bie, wie in der folgenden Abbildung zu sehen, den
Arduino Bibliotheksverwalter.
Abb. 4: Arduino Sketch-Menü
Im sich darauin önenden Bibliotheksverwalter, suchen Sie nach der Wire Bibliothek und installieren
diese.
Abb. 5: Arduino Bibliotheksverwalter
Ausgabe 26.01.2017 Copyright by Joy-IT 7

Als nächstes muss unsere modizierte Bibliothek, die Sie bereits heruntergeladen haben, hinzugefügt
werden.
Entpacken Sie dazu zunächst das heruntergeladene Archiv und kopieren Sie den Ordner
Adafruit-PWM-Servo-Driver-Library-master in folgendes Verzeichnis:
C:\Users\[ihr Benutzername]\Documents\Arduino\libraries
Die Bibliotheken sind nun vollständig installiert.
4. Installation des Moduls
Sie können nun die Beispieldatei ausführen, um die Motorino-Plane zu testen.
Diese Datei nden Sie in folgendem Verzeichnis:
C:\Users\[ihr Benutzername]\Documents\Arduino\libraries\Adafruit_PWM_Servo_Driver_Library\examples\servo
Önen Sie die sich hier bendende Datei mit ihrem Arduino-Programm und übertragen Sie dieses
vollständig auf Ihren Arduino.
Das Beispielprogramm wird nacheinander alle Servokanäle ansprechen.
5. Einrichten der I2C-Adresse
Es ist auch möglich, mehrere Motorino-Planen zu verbinden.
Hierbei ist allerdings zu beachten, dass jede Plane seine eigene I2C-Adresse benögt.
Um die I2C-Adresse der Plane zu kongurieren, können die Jumper verlötet werden.
Ein oener Jumper bedeutet hierbei eine 0 in der Adresse und ein geschlossener Jumper bedeutet eine 1.
Abb. 6: I2C-Jumper
Ausgabe 26.01.2017 Copyright by Joy-IT 8
 Loading...
Loading...