

Page 1
FANs 636.4, 1628.4
Configuration Guides Section
Configuration Guide
Issue Date 0900
DX-9100 Configuration Guide
DX-9100 Extended Digital Plant Controller Page 5
• Introduction *5
• Hardware Configuration 10
Software Configuration 11
• DX-9100 Software Elements 11
• Configuration Tools 11
• Configuring the Controller 14
• DX-9100 Controller Selection 15
• DX-9100 Global Data 15
• Configuration Number (Version 1.1 or Later) 17
• Password Feature (Versions 1.4, 2.3, 3.3, or Later) 17
• Analog Input Configuration 18
• Digital Input Configuration 25
• Analog Output Configuration 26
• Digital Output Configuration 32
• DO: Output Type 34
• Constants and Result Status 40
• Extension Module Configuration *42
• Network Analog Input Configuration (Version 3 Only) *51
• Network Digital Input Configuration (Version 3 Only) 52
• Network Analog Output Configuration (Version 3 Only) 53
• Network Digital Output Configuration (Version 3 Only) 55
• Programmable Function Module Configuration 57
• Control Algorithm Theory 63
* Indicates those sections where changes have occurred since the last printing.
© 2000 Johnson Controls, Inc.
Code No. LIT-6364030 www.johnsoncontrols.com
1
Page 2

• Algorithm 01 - PID Control Module
Page
65
• Algorithm 02 - On/Off Control Module 78
• Algorithm 03 - Heating/Cooling PID Control Module (Dual PID) 86
• Algorithm 04 - Heating/Cooling On/Off Control Module (Dual On/Off) 98
• Numerical Calculation and Other Function Module Configurations 107
• Algorithm 11 - Average 107
• Algorithm 12 - Minimum Select 109
• Algorithm 13 - Maximum Select 111
• Algorithm 14 - Psychrometric Calculation °C 113
• Algorithm 15 - Psychrometric Calculation °F 116
• Algorithm 16 - Line Segment 119
• Algorithm 17 - Input Selector 121
• Algorithm 18 - Calculator 123
• Algorithm 19 - Timer Functions 125
• Algorithm 20 - Totalization 129
• Algorithm 21 - Comparator 133
• Algorithm 22 - Sequencer 136
• Algorithm 23 - Four Channel Line Segment (Version 1.1 or Later) 152
• Algorithm 24 - Eight Channel Calculator (Version 1.1 or Later) 154
• Time Program Functions 156
• Time Schedule Configuration 157
• Optimal Start/Stop Configuration 161
• Programmable Logic Control Configuration 174
• Dial-up Feature with an NDM *188
• Trend Log (Versions 1.4, 2.3, 3.3, or Later) 192
• Supervisory Mode Control Settings (General Module) *195
• Controller Diagnostics 204
• Power Up Conditions 204
• Download/ Upload *206
• Calibration Values 209
* Indicates those sections where changes have occurred since the last printing.
2
Configuration Guides—DX-9100 Configuration Guide
Page 3

Appendix A: SX Tool Item Description and Tables Page 211
• Description of Items 211
• Item List 213
• Floating Point Numbers 215
• EEPROM Items 215
Appendix B: Item Structure 217
• General Module Items Structure *217
• Programmable Function Module Items Structure 223
• Analog Input Module Items Structure 226
• Analog Output Module Items Structure 228
• Digital Output Module Items Structure 229
• Extension Module Items Structure 230
• Time Scheduling Items Structure *236
• Optimal Start/Stop Items Structure 237
• Network Information Module Items Structure 238
• Network Digital Output Module Items Structure 239
• Network Analog Output Module Items Structure 241
• Network Digital Input Module Items Structure 243
• Network Analog Input Module Items Structure 244
Appendix C: Programmable Function Module Items 247
• Algorithm 1 - PID Controller 247
• Algorithm 2 - On/Off Controller 249
• Algorithm 3 - Heating/Cooling PID Controller 251
• Algorithm 4 - Heating/Cooling On/Off Controller 253
• Algorithm 11 - Average Calculation 256
• Algorithm 12 - Minimum Selection 257
• Algorithm 13 - Maximum Selection 258
• Algorithm 14 - Psychrometric Calculation °C 259
* Indicates those sections where changes have occurred since the last printing.
Configuration Guides—DX-9100 Configuration Guide
3
Page 4

• Algorithm 15 - Psychrometric Calculation °F
• Algorithm 16 - Line Segment Function 261
• Algorithm 17 - Input Selector 262
• Algorithm 18 - Calculator 263
• Algorithm 19 - Timer Function 264
• Algorithm 20 - Totalization 266
• Algorithm 21 - Eight Channel Comparator 269
• Algorithm 22 - Sequencer 271
• Algorithm 23 - Four Channel Line Segment Function 274
• Algorithm 24 - Eight Channel Calculator 276
Page
260
Appendix D: Logic Variables 279
• Description of Logic Variables 279
• Logic Variable Tables 280
Appendix E: Analog Items and Logic Variables for the
Trend Log Module *287
* Indicates those sections where changes have occurred since the last printing.
4
Configuration Guides—DX-9100 Configuration Guide
Page 5
DX-9100 Extended Digital Plant Controller
Introduction
This document covers all three versions of the DX-9100 Extended Digital
Controller, including the DX-912x LONW
Version 1 – provides up to eight output modules, which are configured to
give two analog outputs and six digital outputs (triacs).
Version 2 – provides six additional analog output modules, giving a total
of eight analog outputs.
Version 3 – the DX-912x L
communication to the feature set of the Version 2 controller,
and enhanced alarm reporting capability when used as an
integral part of an Building Automation System (BAS).
In this document, BAS is a generic term, which refers to the
Metasys® Network, Companion™, and Facilitator™ supervisory systems.
The specific system names are used when referring to system-specific
applications.
The DX-9100 is the ideal digital control solution for multiple chiller or
boiler plant control applications, for the Heating, Ventilating, and Air
Conditioning (HVAC) process of air handling units or for distributed
lighting and related electrical equipment control applications. It provides
precise Direct Digital Control (DDC) as well as programmed logic control.
ONWORKS
version brings peer-to-peer
® version. They include:
ORKS
In a standalone configuration, the DX-9100 Controller has both the
hardware and software flexibility to adapt to the variety of control
processes found in its targeted applications. Along with its outstanding
control flexibility, the controller can expand its input and output point
capability by communicating with I/O Extension Modules on an expansion
bus, and provides monitoring and control for all connected points via its
built-in Light-Emitting Display (LED). Versions 1 and 2 can communicate
on the N2 Bus as well as on the System 91 Bus*, providing point control
to the full BAS Network or to the N30 system or Companion/Facilitator
System. The Version 3 controller uses the LONW
of the Metasys Control Module (NCM311 or NCM361 in Europe,
NCM300 or NCM350 elsewhere) in place of the N2 Bus.
*The terms System 91 Bus and Metasys Control Station are not used in North America.
Configuration Guides—DX-9100 Configuration Guide
(Echelon®) N2 Bus
ORKS
5
Page 6

The DX-9100 has two packaging styles. In Version 1, all terminals for
field wiring are located within the controller enclosure. Versions 2 and 3
require a separate field wiring mounting base or cabinet door mounting
frame, which enables all field wiring to be completed before the controller
is installed.
Figure 1: Version 1 (DX-9100-8154)
Figure 2: DX-9100-8454 (Version 2)/DX-912x-8454 (Version 3)
with Mounting Base
Note: The mounting base differs for DX-9120 and DX-9121.
6
Configuration Guides—DX-9100 Configuration Guide
Page 7

The DX-9100 processes the analog and digital input signals it receives,
using twelve multi-purpose programmable function modules, a software
implemented Programmable Logic Controller (PLC), time schedule
modules, and optimal start/stop modules; producing the required outputs
(depending on the module configuration), operating parameters, and
programmed logic.
Configuration of all versions of the DX-9100 Controller are achieved by
using a Personal Computer (PC) with GX-9100 Graphic Configuration
Software (Version 5 or later) supplied by Johnson Controls. Changes to
the configuration can be made by using an SX-9120 Service Module
(Version 3.1 or later).
Versions 1 and 2
(N2 Bus)
Version 3
(L
ONWORKS
N2 Bus)
The DX-9100 unit (Versions 1 and 2) has two communication links.
One is called the N2 Bus or Bus 91 (the term Bus 91 is not used in
North America) and is used to interface to a supervisory unit. The other
link is called the XT Bus and is used to expand the DX-9100 input/output
capability by interfacing up to eight XT-9100 or XTM-905 extension
modules. The DX-9100 input/output can be extended by up to 64 remote
input/outputs, analog or digital, depending on the type of the connected
extension modules and XP expansion modules.
Point connections are made on XP modules, which are monitored and
controlled by the XT-9100 or XTM-905 modules. For more details, refer
to the XT-9100 Technical Bulletin in the System 9100 Manual (FAN 636.4
or 1628.4). One XP module can provide either eight analog points or
eight digital points. Two XP modules connected to one extension module
provides eight analog and eight digital points, or sixteen digital points.
Version 1 or 2 of the DX-9100 can be used as a standalone controller or it
can be connected to a BAS through the RS-485 serial communications bus
(N2 Bus or Bus 91).
Version 3 of the controller (DX-912x-8454) brings peer-to-peer
communication to the feature set of the Version 2 controller, and enhanced
alarm reporting capability when used as an integral part of a Metasys BAS
Network.
The new communications features are provided by the L
ONWORKS
Network, which enables Version 3 controllers to pass data from one to
another and to send event-initiated data to the NCM350 (NCM361 in
Europe) Network Control Module, in the BAS. The L
ONWORKS
(Echelon)
N2 Bus is used in place of the N2 Bus, and the NCM300 or NCM350
(NCM311 or NCM361 in Europe) must be fitted with a L
ONWORKS
(Echelon) driver card.
The Version 3 controller retains all the input/output point and control
capabilities of the Version 2 controller, including the point expansion
feature using extension modules and expansion modules.
Configuration Guides—DX-9100 Configuration Guide
7
Page 8

In addition to the Version 2 features, the Version 3 controller has network
input and output points, which can be configured to transmit and receive
data over the LONW
Bus. Each controller may have up to 16 network
ORKS
analog input modules, 16 network analog output modules, 8 network
digital input modules, and 8 network digital output modules. While
network analog input and output modules each contain a single analog
value, the network digital input and output modules each contain 16 digital
states, which are transmitted as a block between controllers. The
transmission of point data is managed by the LONW
Network and is
ORKS
independent of the supervisory functions of the BAS Network Control
Module (NCM). A network of Version 3 controllers can be installed to
share analog and digital data between controllers on a peer-to-peer basis; a
Network Control Module is not required unless the network is to be
supervised by a BAS.
Complex control strategies may now be performed in multiple DX-912x
controllers without the need for network data exchange routines in a
supervisory controller. Applications include the control of multiple,
interdependent air handling units, and large hot water or chilled water
generating plants with components distributed in various locations within
the building.
LONM
ARK
Compatibility
The Version 3 controller has been approved as a LONM
conforms to the LONM
Figure 3: LONM
specification for network data transmission.
ARK
R
ARK
Trademark
ARK
device and
Further information about compatibility and interoperability with other
L
ONMARK
devices may be requested from your local Johnson Controls
office.
8
Configuration Guides—DX-9100 Configuration Guide
Page 9
Related
Information
Refer to Table 1 for additional information on System 9100 controllers:
Table 1: Related Information
Document Title Code Number FAN
DX-9100 Extended Digital Controller
Technical Bulletin
DX-9100 Configuration Guide
GX-9100 Software Configuration Tool
User’s Guide
ORKS
LONW
XT-9100 Technical Bulletin
XT-9100 Configuration Guide
NDM Configurator Application Note
Scheduling Technical Bulletin
Point History Technical Bulletin
SX-9100 Service Module User’s Guide
N2 Bus Technical Bulletin
LIT-6364020 636.4, 1628.4
LIT-6364030 636.4, 1628.4
LIT-6364060 636.4, 1628.4
LIT-6364100 636.4
LIT-6364040
LIT-1628440
LIT-6364050
LIT-1628450
LIT-6364090
LIT-1628490
LIT-636116 636
LIT-636112 636
LIT-6364070
LIT-1628470
636.4
1628.4
636.4
1628.4
636.4
1628.4
636.4
1628.4
Configuration Guides—DX-9100 Configuration Guide
9
Page 10

Hardware Configuration
For full details of the hardware configuration, refer to the DX-9100
Extended Digital Controller Technical Bulletin(LIT-6364020) and the
XT-9100 Technical Bulletin (LIT-6364040).
In summary, the DX-9100 has the following interfaces, inputs, and
outputs:
Versions 1 and 2
Version 3
All Versions
Version 1
• One N2 Bus (Bus 91) RS-485 port for BAS communication
• One L
ONWORKS
N2 Bus for BAS communication and peer-to-peer
communication with other controllers on the same bus (maximum of
30 controllers on one L
ONWORKS
Bus)
• One XT Bus (RS-485 port) for up to 8 extension modules and a
maximum of 64 inputs/outputs
• One port for service module (SX-9120) communication
• Eight digital input ports for connection to voltage-free contacts
• Eight analog input ports; the DX-9100 accepts 0-10 VDC or 0-20 mA
signals from active sensors, or can be connected to Nickel 1000
(Johnson Controls or DIN standard), Pt1000, or A99 passive
RTD sensors, as selected via jumpers on the circuit board
• Six isolated triac digital outputs to switch external 24 VAC circuits
with devices such as actuators or relays
• Two analog output ports, 0-10 VDC or 0-20 mA, as selected via
jumpers on the circuit board; also, 4-20 mA may be selected by
configuration
Versions 2 and 3
• Four analog outputs, 0-10 VDC or 0-20 mA, as selected via jumpers
on the circuit board; also, 4-20 mA may be selected by configuration
• Four additional analog outputs, 0-10 VDC only
• One RS-232-C port for local downloading and uploading software
configurations (N2 Bus protocol)
The software configuration determines how these inputs and outputs are
used, and their range and application.
The DX-9100 must be supplied with a 24 VAC power source. All models
are suitable for 50 Hz or 60 Hz through software configuration.
10
Configuration Guides—DX-9100 Configuration Guide
Page 11

Software Configuration
DX-9100 Software Elements
Version 3 Only
The DX-9100 is a microprocessor-based programmable controller. It has
the following software elements:
• eight analog input modules
• eight digital input modules
• two analog output modules in Version 1;
eight analog output modules in Versions 2 and 3
• six digital output modules
• up to 64 additional inputs/outputs from up to 8 extension modules
• twelve programmable function modules with algorithms for control
and calculation
• eight analog constants and 32 digital constants
• one programmable logic control module with 64 logic result statuses
• eight time schedule modules
• two optimal start/stop modules
• sixteen network analog input modules
Configuration Tools
• eight network digital input modules
• sixteen network analog output modules
• eight network digital output modules
A user configures the controller using the GX-9100 Graphic Software
Configuration Tool. The SX-9120 Service Module is used to troubleshoot
and adjust individual parameters. Techniques for both tools are described
in the following sections.
For complete documentation on both tools, see the GX-9100 Software
Configuration Tool User’s Guide and the SX-9120 Service Module User’s
Guide in FAN 636.4 or 1628.4.
Following is a brief description of the main features of the GX-9100
Software Configuration Tool. Note that the term, click on, means to
position the cursor on the module or menu and then press the appropriate
mouse button to select it.
Note: When using the GX Tool, after entering a parameter, always click
on OK to confirm.
Configuration Guides—DX-9100 Configuration Guide
11
Page 12
Entering Data
into Modules
To enter data into a module displayed on the screen of the GX Tool, place
the cursor on the module, click once on the right mouse button and the
module menu will appear:
Data...
Delete
Connect... F5
Disconnect... F4
Show Selected
Show User Names
dxcon004
Figure 4: Module Menu
Place the cursor on Data and press either mouse button. A Data Window
appears containing all module data. Use the <Tab> key or mouse to move
the cursor from field to field. To make an entry, move the cursor to the
entry field and type in the information. To go to the second page in the
Data Window (if there is one), click on the Data-2 field. To return to the
first page, click on OK or Cancel.
To exit a window, click on OK to confirm entries, or Cancel to discard
them, while in the first page.
Entering Values
The following table shows the accuracy that may be lost due to rounding
errors. Numbers with a modulus of greater that 2047 may be rounded up or
down by 0.1% as follows:
Table 2: Rounding Errors
Range Rounding (+/-)
2048-4095
4096-8191
8192-16383
16384-32767
2
4
8
16
The rounding is due to the external communications bus protocol and does
not compromise the precision of the internal control processes.
12
Configuration Guides—DX-9100 Configuration Guide
Page 13

Entering User
Names
The Data Window contains User Name and Description entry fields. Up to
8 characters may be entered in the User Name field, and the Description
field can have up to 24 characters.
The Data Window also contains an Output Tag field for module outputs
(i.e., source points), which can be connected to another module as inputs
(destinations) and an Input Tag field for module inputs. To enter User
Names for outputs, position the cursor over the Output Tag field and press
the left mouse button once. To enter User Names for inputs, select the
Input Tag field.
Making
Connections
To expand a module displayed on the screen of the GX Tool, in order to
view input/output connections, place the cursor over the module and
double-click on the left mouse button. Input connections appear in the left
column with @ attached to the Tag Name, and output connections are
shown in the right column, except for output modules where all
connections appear in one column. To close a module, place the cursor
over the expanded module and double-click on the left mouse button.
Connections are made using one of the four methods outlined below.
Note that only the first method is referred to later in this guide. An existing
connection must be disconnected before making a new connection.
• The first method is to expand the source and destination modules by
moving the cursor to each module in turn and double-clicking the left
mouse button. Move the cursor over the desired output of the source
module and the cursor appears as an output arrow. Hold down the left
mouse button and drag the arrow to the desired destination input.
When the left mouse button is released, a connection line will be
drawn between the two modules.
• The second method is to select the source module by positioning the
cursor over the module and pressing the left mouse button and then
the <F5> key. A list of the possible source output connections for that
module will be shown. Move the cursor to the desired output to select
it (it will appear highlighted) and click on OK (alternatively,
double-click on the desired output). To complete the connection,
select the destination module by pressing the left mouse button and
then the <F5> key. A list of the possible destination inputs for that
module will be shown. Select the desired destination from the dialog
box and click on OK (alternatively, double-click on the desired
destination). A connection line will be drawn between the
two modules.
Configuration Guides—DX-9100 Configuration Guide
13
Page 14
• The third method is to select the source module by positioning the
cursor over it and pressing the right mouse button. The module menu
will appear. Select Connect and a list of possible source outputs for
that module will appear in a dialog box. Move the cursor to the
desired output to select it (it will appear highlighted) and click on OK
(alternatively, double-click on the desired output). Then select the
destination module by positioning the cursor on it and pressing the
right mouse button. The module menu will appear. Select Connect
and a list of possible destination inputs for that module will be shown.
Move the cursor to the desired input to select it and click on OK
(alternatively, double-click on the desired input). A connection line
will be drawn between the two modules.
• The fourth method is to go to the destination module data window,
move the cursor to a connection field, press the <*> key on the
keyboard, and the available source output tags will be displayed for
selection.
Configuring the Controller
Configuring the controller involves:
• defining characteristics and parameters of the input and output
modules, the programmable function modules for control and
calculation, the extension modules, and the programmable logic
control module
• defining connections between the modules in order to achieve the
desired sequence of control
• setting the time scheduling, optimal start/stop, and realtime clock
parameters
Proceed in the following order:
1. Select the controller type (Versions 1, 2, or 3).
2. Define DX-9100 Global Data under the Edit menu.
3. Define Job Information under the Edit menu.
4. Define analog and digital input characteristics.
5. Define analog and digital output characteristics.
6. Define extension module structures and characteristics.
7. When applicable, define network inputs and outputs for the Version 3
controller (L
ONWORKS
8. Define programmable function module/algorithm characteristics.
9. Define time schedule and exception day settings.
10. Define programmable logic control module.
14
Configuration Guides—DX-9100 Configuration Guide
Bus).
Page 15
DX-9100 Controller Selection
Via GX Tool
Via the SX Tool
DX-9100 Global Data
Set Power Line
Frequency
(50 or 60 Hz)
Select the controller version under the Controller menu:
• DX Version 1.1, 1.2, 1.3, or
• DX Version 1.4, or
• DX Version 2.0, 2.1, 2.2, or
• DX Version 2.3, 2.4 or
• DX Version 3.0, 3.1, 3.2, or
• DX Version 3.3 or 3.4
The SX Tool will display the controller type when first connected to the
controller. No user selection is required.
Via the GX Tool
At the menu bar at the top of the screen, select Edit-Global Data and a window
appears. Under Frequency, click on 50 or 60 Hz. Then click on OK to confirm
the setting. (To discard an entry, click on Cancel.)
Set Initialize on
Power Up Flag
Via the SX Tool
Under General Module, set bit X7 of Item DXS1 (RI.32):
• X7 = 0 50 Hz power line
• X7 = 1 60 Hz power line
When this flag is set to cancel or 1, the override-type Items listed below
are reset after each power up of the controller.
When set to maintained or 0, these override-type Items are maintained
through the power failure.
• Shutoff mode request
• Startup mode request
• Enable Digital Output (Triac) Supervisory Control
• Set Digital Output (Triac) On
• Output Hold mode (Analog and Digital)
• Programmable Function Module Hold
• Time Schedule Module Hold mode
Configuration Guides—DX-9100 Configuration Guide
15
Page 16

Via the GX Tool
Select Edit-Global Data. Under Init. on Power Up, click on maintained
or cancelled.
Via the SX Tool
Under General Module, set bit X8 of Item DXS1 (RI.32):
X8 = 0 No initialization on power up (commands from BAS maintained)
X8 = 1 Initialization on power up (commands from BAS cancelled)
Counter Type
Flag
In the controller, four bytes are reserved for digital input counters and
accumulators in programmable modules. When the DX-9100 is connected
to a BAS, the counter type flag must be set to 0 because the system will
only read 15 bits (maximum reading of 32,767). For BASs that can read
four bytes, or for standalone applications, the flag may be set to 1. The
counter will then read a maximum value of 9,999,999 and then reset to 0.
See Supervisory Mode Control Settings (General Module) further in this
document.
Via the GX Tool
Select Edit-Global Data. Under Counter Type, click on one of the
following:
• 15-bit (BAS)
• 4-byte
Via the SX Tool
Under General Module, set in bit X4 of Item DXS1 (RS.32):
X4 = 0 Selects 15-bit counters
X4 = 1 Selects 4-bit counters
Global Data
Notes
For temperature unit selection, refer to the Analog Input Configuration
section below.
For daylight saving time, refer to the Time Program Functions section
later in this document.
16
Configuration Guides—DX-9100 Configuration Guide
Page 17
Configuration Number (Version 1.1 or Later)
A configuration number may be entered for configuration identification
purposes. The number will be displayed on the front panel of the controller
during initialization. The configuration number is also read and used by
the DX LCD Display to identify which of the display configurations in its
database to use for this controller.
Via the GX Tool
Via the SX Tool
Password
Feature
(Versions 1.4,
2.3, 3.3, or
Later)
Select Edit-Global Data. Enter the appropriate number in the
User Config Code field.
Under General Module, enter the appropriate number in
Item ALG (RI.33).
The password is used to protect a configuration when loaded into a
controller. Once the password has been downloaded into the controller
with the configuration, the controller will only allow a subsequent
download or upload when the password is entered in the Download or
Upload dialog box of the GX Software Configuration Tool. The password
is encrypted by the GX Tool before download.
!
WARNING: If the password is lost and the user does not have
access to the original configuration file that includes
the password, then the controller must be returned
to the supplier or the Johnson Controls factory to
have the memory cleared.
Via the GX Tool
Via the SX Tool
IMPORTANT: A password of 0 disables the protection feature.
The password feature is only available with firmware
Versions 1.4, 2.3, 3.3, or later. In older versions, the
password feature was not implemented.
Note: The password feature is enabled by an entry in the GX9100.ini file
of the GX Tool. The GX Tool software is delivered without this
entry. Refer to the GX-9100 Software Configuration Tool User’s
Guide (LIT-6364060) for details.
Select Edit-Global Data. Enter the password (one to four alphanumeric
characters) in the Password field. Enter 0 if the password feature is not
required. The default password is 0000.
The password cannot be accessed via the SX Tool. A GX Tool must be
used.
Configuration Guides—DX-9100 Configuration Guide
17
Page 18

Analog Input Configuration
The DX-9100 Controller can accept up to eight analog inputs, which are
active (voltage or current) or passive (RTD). Each analog input is defined
and configured by the following parameters:
• User Name and Description (GX only)
• Input Signal/Range
• Measurement Units
• Enable Square Root
• Alarm on Unfiltered Value
• Alarm Limits
• Filter Time Constant
AI: Input Signal
and Ranging
User Name and
Description
Via the GX Tool
To assign the input as active or passive, position the cursor on the
appropriate box and double-click the left mouse button. Then position the
cursor accordingly and click the left mouse button once to select either
Active or Passive.
Select AIn using the right mouse button. Then select Data in the module
menu, and enter as appropriate:
User Name (maximum 8 characters)
Description (maximum 24 characters)
For active inputs, at the Type of Active Input field, enter:
0 = 0-10 VDC
1 = 4-20 mA
2 = 0-20 mA
18
Configuration Guides—DX-9100 Configuration Guide
Page 19

Each analog input module performs the conversion of the input signal to a
variable numeric value expressed in engineering units obtained using the
high range and low range.
High Range (HR) = Enter the equivalent number for reading at
high signal input (10 V, 20 mA)
Low Range (LR) = Enter the reading at low signal input
(0 V, 0 mA, 4 mA)
AI = (PR% / 100) * (HR - LR) + LR
where: PR% = analog value in % of physical input signal
For passive inputs at the Type of Passive Input field, enter:
1 = Ni1000 (Johnson Controls characteristic)
2 = Ni1000 Extended Temperature Range (Johnson Controls
characteristic)
3 = A99 (Johnson Controls characteristic)*
4 = Pt1000 (DIN characteristic)
5 = Ni1000 (L. & G. characteristic) (Firmware, Version 1.1 or later)
6 = Ni1000 (DIN characteristic) (Firmware, Version 1.1 or later)
*Note: The North American Johnson Controls silicon sensors
(TE-6000 series) have very similar characteristics to the
A99 sensor. At 21°C (70°F) and 25°C (77°F) the reference values
are identical. At -40°C (-40°F), the reading will be 0.8°C (1.5°F)
high. At 38°C (100°F), the reading will be 0.3°C (0.5°F) high.
For Resistance Temperature Device (RTD) inputs, the range of the
displayed value is fixed according to the type of sensor. The high/low
range entries will not have any effect on the actual sensor readout. The
configured high and low ranges determine the control range of any control
module to which it is connected. (The difference between the High Range
value and the Low Range value is equivalent to a proportional band
of 100%.)
At the High/Low control range field, enter the required value:
High Range (Control) =
Low Range (Control) =
Configuration Guides—DX-9100 Configuration Guide
19
Page 20

Via the SX Tool
Under Analog Inputs configure Item AITn (RI.00):
(Low Byte)
X7 = 0 0-10 Volts
X7 = 1 0-20 mA, 0-2 V or RTD
X8 = 1 20% suppression (2-10 V or 4-20 mA)
(High Byte)
X11 X10 X9 = 000 Active Sensor (Linear)
X11 X10 X9 = 001 Ni 1000 RTD Passive Sensor
(Johnson Controls)
(-45 to 121°C [-50 to 250°F])
X11 X10 X9 = 010 Ni 1000 RTD High Temperature
Sensor
(21 to 288°C [70 to 550°F])
X11 X10 X9 = 011 RTD Sensor A99 (Johnson Controls)
(-50 to 100°C [-58 to 212°F])
AI: Measurement
Units
X11 X10 X9 = 100 RTD Sensor Platinum 1000 (DIN)
(-50 to 200°C [-58 to 392°F])
Version 1.1 or Later
X11 X10 X9 = 101 Ni 1000 RTD (L. & G.)
(-50 to 150°C [-58 to 302°F])
X11 X10 X9 = 110 Ni 1000 RTD (DIN)
(-50 to 150°C [-58 to 302°F])
For active inputs, the analog input module performs the conversion of the
input signal to a variable numeric value expressed in engineering units
obtained using the high range at Item HRn (RI.01) and low range at Item
LRn (RI.02).
For RTD passive inputs, the range of the displayed value is fixed
according to the type of sensor. The configured range determines the
control range of any control module to which it is connected.
Via the GX Tool
To choose between Celsius and Fahrenheit for active and passive sensors,
select Edit-Global Data. Under Temperature Units, select Celsius or
Fahrenheit.
20
Configuration Guides—DX-9100 Configuration Guide
Page 21

To set the measurement units for active sensors, select the AIn module,
and then Data to call up the Data Window. Enter in the Measurement
Units field:
0 = None
1 = Temperature (C or F as entered under Edit-Global Data)
2 = Percent (%) (Version 1 only)
In a Version 1 controller the units are displayed on the front panel of the
controller as °t, %, or none.
Via the SX Tool
Under Analog Inputs, configure Item AITn (RI.00). The measurement and
temperature units of each analog input can be selected with the following
bits (low byte):
X4 X3 X2 X1 = 0000 No Units
X4 X3 X2 X1 = 0001 Celsius
X4 X3 X2 X1 = 0010 Fahrenheit
X4 X3 X2 X1 = 0011 Percent (Version 1 only)
AI: Enable
Square Root
For RTD sensor inputs, Celsius and Fahrenheit units must be selected.
Changing individual units for each AI can only be done via the SX Tool.
This function allows the linearization of the differential pressure signal
from a 0-10 VDC or 0/4-20 mA active sensor; the function is effective
over the selected range and is only available for active sensors.
AI = sqrt (PR%/100) * (HR - LR) + LR
Where PR% = the Analog Value in % of the physical input signal range;
HR = High Range Value; and LR = Low Range Value.
Via the GX Tool (option only available with active sensor)
Select AIn. Then select Data in the module menu. At the Square Root
field, enter 0 to disable the square root function, or 1 to enable the square
root function.
Via the SX Tool
Under Analog Inputs, configure Item AITn (RI.00) (low byte):
X5 = 1 Enable Square Root of Input
X5 = 0 Disable Square Root of Input
AI: Alarm on
Unfiltered Value
An alarm from the High Limit and Low Limit Alarm values will be
generated from the unfiltered input.
Configuration Guides—DX-9100 Configuration Guide
21
Page 22
Via the GX Tool
Select AIn. Then select Data in the module menu. At the Alarm Unfiltered
field, enter 0 to set an alarm on a filtered value, or 1 to set an alarm on an
unfiltered value.
Via the SX Tool
Under Analog Inputs, configure Item AITn (RI.00) (low byte):
X6 = 1 Alarm on Unfiltered Value
X6 = 0 Alarm on Filtered Value
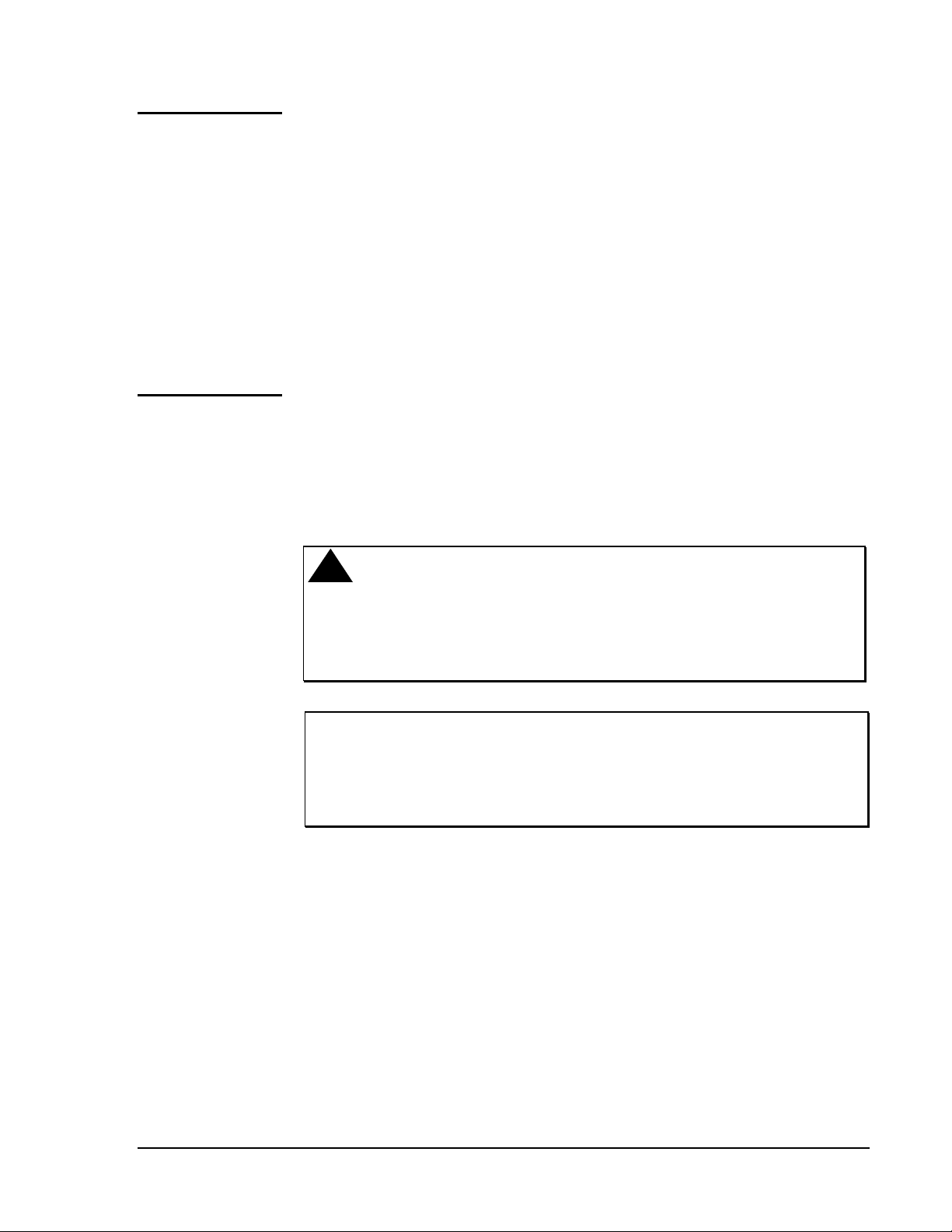
AI: Alarm Limits
The high limit and the low limit define at which levels the analog input
reading will generate an alarm, either for remote monitoring or for internal
use within the control sequences in the DX-9100. A limit differential
defines when a point comes out of alarm.
Note: The limits cannot be deleted. If you do not want alarms, enter
limits beyond the high/low range of the sensor.
High Limit
Differential
AI
Val ue
Differential
Low Limit
High Alarm
No Alarm
No Alarm
Low Alarm
dxcon005
Figure 5: How Alarm Limits Function
Via the GX Tool
Select AIn. Then select Data in the module menu. At the respective field,
enter the required value:
High Limit =
Low Limit =
Limit Differential =
22
Configuration Guides—DX-9100 Configuration Guide
Page 23

The low limit and high limit alarm processing can be disabled. In the menu
bar, select Edit-Add Alarm Disable. The corresponding module (box) will
appear on screen. Make connections as described earlier under
Configuration Tools - Making Connections.
Note: The Alarm Disable feature is sometimes referred to as Auto
Shutdown in the BAS.
Via the SX Tool
Under Analog Inputs, the alarm limits differential is adjustable with Item
ADFn (RI.06). The high limit is at Item HIAn (RI.03), the low limit is at
Item LOAn (RI.04).
The low and high limit alarm processing can be disabled by making a
logical connection to Item ALD@ - Alarm Disable Condition Source
(General Module RI.31).
For Both SX and GX
When the logic signal connected to ALD@ or Alarm Disable Condition
Source is true (1), alarm states on analog inputs will be frozen until the
logical signal returns to false (0). (Alarm states on analog inputs to XT
modules are not frozen by the ALD@ connection.)
AI: Filter Time
Constant
AI Notes
The Filter Time Constant Ts (seconds) is used to filter out any cyclic
instability in the analog input signals. The calculations are:
FVt = FV
Where: FV
Via the GX Tool
+ [1/(1 + Ts)] * (AIt - FV
t-1
= Filtered Analog Value at current time
t
FV
AI
= Filtered Analog Value at previous poll
t-1
= Actual Analog Value at current time
t
t-1
)
Select AIn. Then select Data in the module menu. At the Filter Constant
(sec) field, enter a number within the recommended range 0 to 10.
Via the SX Tool
Under Analog Inputs, the Filter Time Constant is selected at Item FTCn
(RI.05).
1. You can read the AI values, and read and modify the alarm limit
values using the DX front panel. See Display Panel and Keypads in
the DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
Configuration Guides—DX-9100 Configuration Guide
23
Page 24

2. The alarm condition of one or more analog inputs is also indicated by
an LED (AL) on the front panel. If the LED is steady, the current AI is
in alarm; if flashing, another AI is in alarm.
3. Using the SX Tool, analog input values can be read at Analog Inputs
Item AIn (RI.07), and the percent of range value can be read at Item
AI%n (RI.08). The value as an ADC count can be read at Item ADCn
(RI.09).
4. Using the SX Tool, analog input alarm statuses can be read at General
Module Item AIS (RI.07), or at Analog Input Item AISTn (RI.10),
where bits X1 and X2 indicate the high and low alarm conditions,
respectively.
5. Under Analog Inputs, the analog Item AISTn (RI.10), bits X3 and X4,
indicate an input over-range (input about 2% of range above HR)
condition and an input under-range (input about 2% of range below
LR) condition, respectively. (This information is available on the
SX Tool only.)
6. Calibration coefficients for active and passive analog inputs are stored
in the EEPROM of the DX. See the Calibration Values section further
in this document.
GX Labels
Source Points (Outputs)
AIn The current value of the analog input.
AI%n The current value of the analog input in percent (%) of range.
AIHn A 1 if the analog input is above its high limit and not below the
high limit - limit differential.
AILn A 1 if the analog input is below the low limit and not above the
low limit + limit differential.
OVRn A 1 when the value of an active analog input is more than
about 2% above its high range (overrange condition), or a
passive analog input is open circuited.
UNRn A 1 when the value of an active analog input is more than
about 2% below its low range (underrange condition), or a
passive analog input is short circuited.
Destination Points (Inputs)
None.
Note: The following destination point is applicable to all analog inputs:
ALDS@ The connection to disable alarm processing on analog inputs
AI1 - AI8.
24
Configuration Guides—DX-9100 Configuration Guide
Page 25
Digital Input Configuration
The DX-9100 Controller can accept up to eight digital inputs, which will
be considered active when driven to a common digital ground by an
external volt-free contact. The DI is defined and configured by the
following parameters:
• User Name and Description (GX only)
• Prescaler
The digital input transitions are counted as follows:
DI: User Name,
Description,
Prescaler
Digital
Input
DIn
Prescale
Factor
PCn
Count
Transition
DICn
Pulse
Counter
CNTRn
dxcon006
Figure 6: Digital Input Transitions
The Pulse Counter (CNTRn) counts all state transitions of the bit-Item
DICn. A state transition at DICn occurs when the number of transitions
from 1 to 0 of DIn Digital Input equals the value of the Prescaler Factor
(PCn). For example, if PCn is equal to 1, then every 1 to 0 state transition
at the DI will add 1 to CNTRn. If equal to 3, then three changes from 1 to
0 will add 1 to CNTRn. The maximum transition rate of DIn is 10 pulses
per second (minimum 50 ms On and 50 ms Off).
Via the GX Tool
Select DIn. Then select Data in the module menu.
At the User Name field, enter the name, which can have a maximum of
eight characters.
At the Description field, enter the descriptive text, which can have a
maximum of 24 characters.
DI Notes
At the Prescaler (counts) field, enter a number between 1 and 255.
Via the SX Tool
Under General Module, enter the prescaler for each digital input at Items
PC1 (RI.22) to PC8 (RI.29).
1. You can read the DI’s status and counter values using the DX front
panel. See Display Panel and Keypads in the DX-9100 Extended
Digital Controller Technical Bulletin (LIT-6364020) in FAN 636.4
or 1628.4.
2. On the SX Tool, the digital input status (DIn), the count transition
status (DICn) and the pulse counter values can be read under General
Module at the Items given in Figure 6.
Configuration Guides—DX-9100 Configuration Guide
25
Page 26
GX Labels
Source Points (Outputs)
DIn The current status of the digital input.
DICn Toggles from 0 to 1 or 1 to 0 when the number of digital input
transitions (counts) equals the prescaler.
Destination Points (Inputs)
None.
Analog Output Configuration
The DX-9100 Controller has two analog outputs (numbered 1 and 2),
controlled by two analog output modules, and six digital (triac) outputs
(numbered 3 to 8) controlled by six logic output modules.
Versions 2 and 3 of the DX-9100 have an additional six analog outputs
(numbered 9 to 14) controlled by six analog output modules.
The analog output module provides the interface between a 0-10 VDC or
0/4-20 mA hardware output and a numeric value scaled to a 0-100% range
using a high and low range variable.
Each analog output is defined and configured by the following parameters:
• user name and description (GX Only)
• type of output
• numeric source
• increase/decrease source (if any)
• low and high ranges
• forcing mode and level
• hold or auto on power up
• output limits, enable limits
AO: Output Type
Via the GX Tool
Select AOn. Then select Data in the module menu. At the field
User Name, enter the name.
At the Description field, enter the description.
Then enter the output code:
0 = Disabled
1 = 0 to 10 VDC
2 = 0 to 20 mA (not available for Outputs 11-14)
3 = 4 to 20 mA (not available for Output 11-14)
26
Configuration Guides—DX-9100 Configuration Guide
Page 27

Via the SX Tool
Under Output Modules, the output type can be configured in Item AOTn
(RI.00). To define the output signal set the bits as follows:
X2 X1 = 00 Output Disabled
X2 X1 = 01 Output 0-10 V
X2 X1 = 10 Output 0-20 mA (not available for Outputs 11-14)
X2 X1 = 11 Output 4-20 mA (not available for Outputs 11-14)
AO: Source
This defines the source of the numeric control signal that drives the output
module. The output module can, alternatively, have two logic sources: the
source of the increase signal and the source of the decrease signal. The rate
of increase or decrease is fixed at 1% per second.
Via the GX Tool
Expand both source and AOn modules. Place the mouse on the source
point. Hold down the left mouse button and drag the cursor to the center of
AO@. The connection will be made when the mouse button is released.
If logic variables (Increase/Decrease) are used as a source to drive the
analog output, then the source module and AOn module must be expanded
as described above. Place the cursor on the logic source point. Press the
mouse button and while keeping it pressed, drag the cursor to INC@ in the
AOn module. Release the mouse button to make the connection. Repeat
the same procedure for the DEC@ connection.
Via the SX Tool
Under Output Modules, Item AO@n (RI.01) defines the source of the
numeric control signal. Alternatively, the source of the increase signal is
defined in Item INC@n (RI.10), and the source of the decrease signal is
defined in Item DEC@n (RI.11).
AO: Forcing
Mode and Level
This defines the source of a logic variable that forces the Analog Output to
a forcing level between 0 and 100%. When the logic source is 1, the AO
will be forced to the % entered in Forcing Level. When the logic source
is 0, the AO will be commanded to position via the source point.
Note: If a PID is connected to the AO and the AO is forced, the PID will
experience force-back, which means the PID is also in Hold mode
at this time and its output is forced to the value of the analog
output.
Configuration Guides—DX-9100 Configuration Guide
27
Page 28

Via the GX Tool
Select AOn. Then select Data in the module menu. At the
Forcing Level (%) = field, enter a number between 0 and 100%.
Double-click on AOn to expand the module. Double-click on the source
module. Place the cursor on the logic source point. Press the mouse button
and while keeping it pressed, drag the cursor to AOF@. Release the mouse
button to make the connection.
Via the SX Tool
Under Output Modules, Item AOF@n (RI.02) defines the source of a logic
variable that forces the output to the forcing level, which is defined in Item
OFLn (RI.05).
AO: Hold or Auto
On Power Up
Upon power restoration, the AO can optionally be forced to a Hold
(Manual) or Auto (Hold reset) condition, irrespective of the Hold
condition before the power failure and overriding the Initialization on
Power Up setting for the controller and overrides sent from the front panel
or BAS.
Via the GX Tool
Select AIn. Then select Data in the module menu. Then enter 1 for the
appropriate power up condition, if required:
Hold on Power Up = (1 = Yes)
Auto on Power Up = (1= Yes)
If both Hold and Auto are enabled, Hold has higher priority. If both are
disabled, the current setting under the Initialization on Power Up field
determines the output.
Via the SX Tool
Under Output Modules, set bits X7 and X8 of Item AOTn (RI.00) as
follows:
bit X8 = 0 The Hold mode is not altered after a power failure.
bit X8 = 1 The Hold mode is set at power up to the status set in bit X7.
bit X7 = 0 The Hold mode is set to hold at power up if bit X8 is set.
bit X7 = 1 The Hold mode is reset (set to 0) at power up if bit X8 is set.
28
Configuration Guides—DX-9100 Configuration Guide
Page 29

AO: Range
The High Range Item (HRO) defines the level of the control source signal
(AOn), which would correspond to an output of 100%.
The Low Range Item (LRO) defines the level of the control source signal
(AOn), which would correspond to an output of 0%.
If LROn < AOn < HROn OUTn = 100 * (AOn - LROn)/(HROn -
LROn)%
If AOn <= LROn OUTn = 0% (0 V, 0/4 mA)
If AOn >= HROn OUTn = 100% (10 V, 20 mA)
When the source point is equal to the high range, then the output will be at
the maximum signal (10 V/20 mA). When the source point is equal to low
range, then the output will be at the minimum signal (0V, 0/4 mA).
Via the GX Tool
Select AIn. Then select Data in the module menu. At the High Range and
Low Range fields, enter the appropriate numbers within the range of the
source signal:
High Range =
AO: Output
Limits, Enable
Limits
Low Range =
Via the SX Tool
Under Output Modules, set the High Range at Item HROn (RI.03) and the
Low Range at Item LRO (RI.04).
The output high limit defines the maximum output in percent. The output
low limit defines the minimum output in percent. These limits are enabled
by a logic connection and are only operative when the logic source is at 1.
When the limits are enabled:
If OUTn > HLOn
OUTn = HLOn
If OUTn < LLOn
OUTn = LLOn
Configuration Guides—DX-9100 Configuration Guide
29
Page 30

Via the GX Tool
Select AOn. Then select Data in the module menu. At the
High Limit % and Low Limit % fields, enter the desired number (0-100%).
For Enable Limits, expand both source and AOn modules. Position the
cursor on the source point. Press the mouse button, and while keeping it
pressed, drag the cursor to ENL@. Release the mouse button to make the
connection.
Via the SX Tool
Under Output Modules, set the following:
High Limit on Output = Item HLOn (RI.08)
Low Limit on Output = Item LLOn (RI.09)
The limits are enabled by a logic connection to Item ENL@n (RI.12).
AO Notes
1. The AO can be read and overridden (placed in hold) from the DX
front panel. See Display Panel and Keypads in the DX-9100 Extended
Digital Controller Technical Bulletin (LIT-6364020) in FAN 636.4 or
1628.4.
2. On the SX Tool, the analog output values can be read in percent at
Item OUTn (RI.06) and can be modified when the module is in Hold
mode.
3. On the SX Tool, Analog output control and status can be seen at
Item AOCn (RI.07) in the following bits:
X1 = 1 OUHn Output in Hold mode (Manual)
X2 = 1 AOHn Output at High Limit ... 100%
X3 = 1 AOLn Output at Low Limit ... 0%
X4 = 1 AOFn Output is Forced
X6 = 1 OULn Output is Locked (Both INC@n and DEC@n
are true)
4. The analog output module can be set in Hold on the DX front panel or
by the PLC, the SX Tool, a BAS, or by configuration on power up.
30
Configuration Guides—DX-9100 Configuration Guide
Page 31

GX Labels
Source Points (Outputs)
AOFn A 1 when an analog output (AO) is being externally forced.
AOHn A 1 when the analog output is equal to or above its high range.
AOLn A 1 when the analog output is equal to or below its low range.
OUHn A 1 when an analog or digital output is in Hold mode from
either the DX front panel or BAS.
OUTn The value of the analog output (including PAT or DAT).
Destination Points (Inputs)
AO@ The numeric connection to control an analog output.
AOF@ The connection to force an analog output to a specified value.
DEC@ The connection to decrement an analog type output, PAT/DAT
digital type output or a sequencer module. While connection is
a logic 1, the output will decrease at a rate dependent on the
type of module.
ENL@ The connection to enable output limits of an analog type output
(PAT and DAT included).
INC@ The connection to increment an analog type output, PAT/DAT
digital type output or a sequencer module. While connection is
a logic 1, the output will increase at a rate dependent on the
type of module.
Configuration Guides—DX-9100 Configuration Guide
31
Page 32

Digital Output Configuration
The DX-9100 Controller has six digital output modules that are used to
control six triacs. The digital output module provides the interface
between a triac output and a numeric or logic variable. The modules can
be programmed as one of five main output types.
Some of the output types drive two consecutive outputs. In that case the
second, consecutive module will be disabled, as it cannot be executed.
For each digital output module one must define:
• the type of output
• User Name and Description
For digital output modules defined as PAT or DAT, you must also define:
• the source
• increase/decrease source (if any)
• the source of the feedback (if any) (PAT only)
• the low and high ranges
• the Forcing Mode and Level
• Hold or Auto on power up
PAT Position
Adjust Type
• output limits, enable limits source (if any)
• the PAT full stroke time or DAT cycle
• the PAT deadband or DAT minimum on/off time
The types of configurations are described next, followed by the steps
needed to configure the outputs.
The PAT output type uses a pair of triacs and a numeric source.
Position Adjust Type control is also known as incremental control. Using
High Range and Low Range parameters, the value of the numerical source
is normalized to a 0-100% value and is used as the required position for
the output.
The PAT output may have a physical feedback value signal (0-100%) from
an analog input or other numerical variable. In this configuration the
output module will drive the first triac of the pair (increase or up signal) as
long as the feedback value is less than the required position. It will drive
the second triac of the pair (decrease or down signal) as long as the
feedback value is greater than the required position. A deadband
(in percent) is specified to avoid unnecessary cycling of the triac outputs
when the feedback signal is approaching the required position, and
compensates for any hysteresis or mechanical tolerances in the driven
device.
32
Configuration Guides—DX-9100 Configuration Guide
Page 33

When the PAT output does not have a physical feedback signal, it operates
on the amount of change in the required position. To synchronize the PAT
output module to the driven device, whenever the required position goes to
100%, the first triac (increase) will be switched on for the calculated time
and will remain on for the specified Full Stroke Time of the driven device.
Whenever the required position goes to 0%, the second triac (decrease)
will be switched on for the calculated time and will remain on for the
specified Full Stroke Time. If the required position remains at 100% or
0%, the appropriate triac will be switched on for the Full Stroke Time
every two hours to ensure that the driven device remains at its end position
over an extended period of time. For all other values of the required
position, the PAT output module calculates the appropriate increase or
decrease time, based on the Full Stroke Time, to bring the driven device
from the last required position to the current required position, and
switches the appropriate triac on for this time. The triac will not be
switched if the change in the required position is less than the specified
deadband. The calculation of the PAT time is performed on each processor
cycle (every second), and the minimum triac on time is 100 msec.
Note: The DX display panel shows the required position value (OUTn)
for the digital output module associated with the first triac output.
DAT Duration
Adjust Type
On/Off
The DAT output type provides a time-based duty cycle output that is
proportional to the value of a numeric source. Using High Range and
Low Range parameters, the value of the numerical source is normalized to
a 0-100% value as is used as the required duty cycle. For example, with a
25% duty cycle and a DAT cycle time of 600 seconds, the triac output will
be switched on for 150 seconds and off for 450 seconds. At 0% required
duty cycle the triac is always off, and at 100% duty cycle the triac is
always on. To avoid short on pulses when the required duty cycle is close
to 0%, or short off pulses when the required duty cycle is close to 100%, a
minimum on/off time may be specified (in percent of duty cycle). For
applications with a short DAT duty cycle (< 10 sec) it should be noted that
the absolute minimum on or off time of the output triac is 100 msec. The
DAT will always complete a calculated on or off period before
recalculating the next off or on time from the current value of the numeric
source. The DAT recalculates after its on time and after its off time so a
full on/off cycle may not equal the repetition cycle if the numeric source is
changing.
This type provides a single maintained on/off triac output. It can be driven
by either a logic source or numeric source where a positive value would
equal an on and a zero or negative value would equal an off.
Configuration Guides—DX-9100 Configuration Guide
33
Page 34

STA/STO
This type uses a pair of triac outputs and requires a logic source. A start
command (logic source changes from 0 to 1) sends a one second pulse to
the first triac of the pair and a stop command (logic source changes from
1 to 0) sends a one second pulse to the second triac.
Note: The DX display panel shows the status of the logic source to the
digital output module associated with the first triac output. This
displayed status is also the last command (on or off) to the triac
pair. The display does not indicate the actual triac status.
PULSE
DO: Output Type
User Name and
Description
This type provides a single momentary triac output from a logic source.
When the logic source becomes a 1, a one second pulse is sent to the triac.
When the logic source changes to 0, a one second pulse is sent to the same
triac.
Via the GX Tool
Double-click on DOn with the left mouse button. Then select one of the
following: PAT, DAT, On/Off, STA/STO, or PULSE. Select DOn using
the right mouse button. Then select Data in the module menu. Enter the
user name and description in the respective fields.
Via the SX Tool
For each digital output module the type of output can be selected with the
following bits under Output Modules in Item DOTn (RI.00):
X3 X2 X1 = 000 Output disabled or paired.
X3 X2 X1 = 001 On/Off - driven from a logic source.
X3 X2 X1 = 010 On/Off - driven from a numeric source
(< 0 = off, > 0 = on).
X3 X2 X1 = 011 DAT (Duration Adjust Type) output, or
time-based proportional duty cycle, driven from
a numeric source.
X3 X2 X1 = 100 PAT without feedback: combination of two
outputs, driven from a numeric source.
Note: The next output is automatically taken from
X3 X2 X1 = 101 PAT with Feedback: combination of two outputs,
driven from a numeric source with an associated
feedback connection.
34
Configuration Guides—DX-9100 Configuration Guide
the next Digital Output Module in numerical
sequence.
Page 35

X3 X2 X1 = 110 Start/Stop: combination of two outputs driven from a
logic source. This module gives the start command,
and the next digital output (in numerical sequence)
gives the stop command. Each triac switches on for
one second.
X3 X2 X1 = 111 Pulse Type: the output generates a one second pulse
for each state transition of a logic source.
DO: Source
This defines the source of the signal that will drive the output module.
PAT and DAT output modules, alternatively to one numeric source, can
have two logic sources: the source of the increase signal and the source of
the decrease signal. The rate of increase or decrease for PAT type outputs
is derived from the full stroke time. For DAT type outputs the rate is
1% per second.
Via the GX Tool
Expand both source and DOn modules. Position the cursor on the source
point. Press the mouse button, and while keeping it pressed, drag the
cursor to DOn@. Release the mouse button to make the connection.
Alternatively, for PAT and DAT modules, you can select sources for
increase and decrease. Connections are made in the usual way between the
increase source point and INC@, and between the decrease source point
and DEC@ in the DOn module.
Via the SX Tool
Under Output Modules, the signal source is defined by
Item DO@n (RI.01). PAT and DAT output modules can, alternatively,
have two logic sources. The source of the increase signal is defined in
Item INC@n (RI.13), and the source of the decrease signal is defined in
Item DEC@n (RI.14).
DO: Feedback
for PAT
This defines the source of the analog feedback (0-100%) that is needed for
the PAT with feedback type module.
Via the GX Tool
Expand the source and destination modules. Position the cursor on the
source point. Press the mouse button, and while keeping it pressed, drag
the cursor to FB@. Release the mouse button to make the connection.
Via the SX Tool
Under Output Modules, Item FB@n (RI.02) defines the source of the
analog feedback.
Configuration Guides—DX-9100 Configuration Guide
35
Page 36

DO: Range
(PAT or DAT)
The High Range (HRO) defines the level of the control numeric source
signal, which will correspond to the maximum output of 100%.
The Low Range (LRO) defines the level of the numeric control source
signal, which will correspond to the minimum output of 0%.
The requested output is scaled to obtain:
OUTn = 100 * (DOn - LROn) / (HROn - LROn) %
Where DOn is the value of the control signal to the module (source value).
Via the GX Tool
Select DOn. Then select Data in the module menu. At the High Range and
Low Range fields, enter the desired numbers within the range of the source
control signal.
Via the SX Tool
Under Output Modules, set the following:
High Range at Item HROn (RI.04)
Low Range at Item LROn (RI.05)
DO: Forcing
Mode and Level
(PAT or DAT
DO: Hold or Auto
On Power Up
(PAT or DAT
This defines the source of a logic signal that forces the logic module
output to a forcing level. When the logic connection is a 1, the output will
go to a forced level; when 0, the output will go to normal control.
Via the GX Tool
Select DOn. Then select Data in the module menu. At the Forcing Level
field, enter a number from 0 to 100%.
Expand the source and destination modules. Position the cursor on the
logic source point. Press the mouse button, and while keeping it pressed,
drag the cursor to DOF@. Release the mouse button to make the
connection.
Via the SX Tool
Under Output Modules, Item DOF@n (RI.03) defines the source;
Item OFLn (RI.10) defines the forcing level.
Upon power restoration, the DO can optionally be forced to a Hold or
Auto (Hold reset) condition, irrespective of the Hold condition before the
power failure and overriding the Initialization on Power Up setting for the
controller.
36
Configuration Guides—DX-9100 Configuration Guide
Page 37

Via the GX Tool
Select DOn. Then select Data in the module menu. Then enter 1 for the
appropriate power up condition, if required:
Hold on Power up = (1 = Yes)
Auto on Power up = (1= Yes)
If both Hold and Auto are enabled, Hold takes priority. If both are
disabled, the current setting under the Initialization on Power Up field
determines the output.
Via the SX Tool
Under Output Modules, set bits X7 and X8 of Item DOTn (RI.00) as
follows:
bit X8 = 0 The Hold mode is not altered after a power failure.
bit X8 = 1 The Hold mode is set at power up to the status set in bit X7.
bit X7 = 0 The Hold mode is set to hold at power up if bit X8 is set.
bit X7 = 1 The Hold mode is reset (set to 0) at power up if bit X8 is set.
DO: Output
Limits (PAT with
Feedback or
DAT
The output high limit defines the maximum output in percent. The output
low limit defines the minimum output in percent. These limits are enabled
by a logic connection and are only operative when the logic source is as 1.
When the limits are enabled:
If OUTn > HLOn
OUTn = HLOn
If OUTn < LLOn
OUTn = LLOn
Via the GX Tool
Select DOn. Then select Data in the module menu. At the
High Range Limit % and Low Limit % fields, enter the desired numbers
(0-100%).
Expand source and destinations modules. Position the cursor on the source
point. Press the mouse button, and while keeping it pressed, drag the
cursor to ENLn@ in the destination module. Release the mouse button to
make the connection.
Configuration Guides—DX-9100 Configuration Guide
37
Page 38

Via the SX Tool
Under Output Modules, set the following:
High Limit on Output = Item HLOn (RI.08)
Low Limit on Output = Item LLOn (RI.09)
The limits are enabled by a logic connection to Item ENL@n (RI.15).
DO: PAT Full
Stroke Time or
DAT Cycle
DO: PAT
Deadband
The full stroke time (in seconds) needs to be defined for PAT type
modules. This is the time it takes the electromechanical actuator to drive
the controlled device from fully open to fully closed or vice versa.
The DAT cycle (in seconds) also needs to be defined. This is the duration
adjust time proportion base for a DAT type output.
Via the GX Tool
For PAT, select DOn. Then select Data in the module menu. At the Stroke
Time (sec) field, enter the electro-mechanical actuator stroke time.
For DAT, select DOn. Then select Data in the module menu. At the
Repetition Cycle (sec) field, enter the cycle.
Via the SX Tool
Under Output Modules, Item FSTn (RI.06) defines the full stroke time
(in seconds) for PAT type modules.
The same Item defines the DAT cycle (in seconds).
The PAT deadband is the change in output value required to initiate triac
switching in a PAT type output.
DAT Minimum
On/Off Time
The DAT minimum On/Off time defines in percent of cycle the shortest on
period when the required output approaches 0%, and the shortest off
period when the required output approaches 100%.
Via the GX Tool
For PAT, select DOn. Then select Data in the module menu. At the
Deadband field, enter the desired number (normally a whole number
between 0 and 5%).
For DAT, select DOn. Then select Data in the module menu. At the
Minimum On/Off (%) field, enter the desired number in percentage of
repetition cycle (normally between 0 and 5%).
38
Configuration Guides—DX-9100 Configuration Guide
Page 39

Via the SX Tool
Under Output Modules, Item DBn (RI.07) defines the PAT deadband.
The same Item defines the DAT Minimum On/Off in % of output.
DO Notes
1. The DOs can be read and overridden (put in hold) from the DX front
panel. See Display Panel and Keypads in the DX-9100 Extended
Digital Controller Technical Bulletin (LIT-6364020) in FAN 636.4
or 1628.4.
2. On the SX Tool, the output values can be read in percent at Output
Modules, Item OUTn (RI.11). For PAT and DAT type modules the
range is 0-100%. The other types have an output of 0 (off) or 100 (on)
percent.
3. Digital Output Control and Status can be seen at Item DOCn (RI.12)
on the SX Tool in the following bits:
X1 = 1 OUHn Output in Hold mode (manual)
X2 = 1 DOHn Output at High Limit ... 100%
X3 = 1 DOLn Output at Low Limit ... 0%
X4 = 1 DOFn Output is Forced
X5 = 1 AFBn Incorrect Feedback
(The incorrect feedback bit is set whenever one of the PAT output
triacs is switched on and the feedback signal does not change within
five seconds.)
X6 = 1 OULn Output is Locked (both INC@n and DEC@n are
true)
4. The triac output status can be read on the SX Tool under General
Module, at Item TOS (RI.05).
5. The digital output module can be set in Hold (Manual) on the DX
front panel or by the PLC, the SX Tool, a BAS, or by configuration on
power up.
Configuration Guides—DX-9100 Configuration Guide
39
Page 40

GX Labels
Source Points (Outputs)
AFB A 1 when the DO PAT associated feedback value is not
responding to changes in the DO PAT command value.
DOn The status of the digital output.
DOFn A 1 when the digital output PAT or DAT is being externally
forced.
DOHn A 1 when the digital output PAT or DAT is at its defined high
limit.
DOLn A 1 when the digital output PAT or DAT is at its defined low
limit.
OUHn A 1 when an analog or digital output is in Hold mode from
either the DX front panel or BAS.
OUTn The value of the analog output (including PAT or DAT).
Destination Points (Inputs)
DEC@ The connection to decrement an analog type output, PAT/DAT
digital type output or a sequencer module. While connection is
a logic 1, the output will decrease at a rate dependent on the
type of module.
Constants and Result Status
Analog
Constants
DO@ The connection to control a digital output.
DOF@ The connection for forcing a digital output to a specified value.
ENL@ The connection to enable output limits of an analog type output
(PAT and DAT included).
FB@ The connection to the feedback of a PAT. Usually a signal from
a potentiometer on the controlled device.
INC@ The connection to increment an analog type output, PAT/DAT
digital type output or a sequencer module. While connection is
a logic 1, the output will increase at a rate dependent on the
type of module.
There are eight Analog Constants in the DX-9100. The value of each
constant can be set by the SX-9120 Service Module, GX-9100
Configuration software, or BAS, used in an analog connection to provide a
constant analog value for a programmable function module or output
module. In a Version 2 or 3 controller, the analog constants may also be
set at the DX front display panel. These values are not located in
EEPROM and therefore can be written to via the BAS.
40
Configuration Guides—DX-9100 Configuration Guide
Page 41

Via the GX Tool
Select PM from the toolbar, and then Analog Constants. An ACO module
(box) appears. Place it where desired on screen. Select ACO. Then select
Data in the module menu. Enter the values as required. Select OK to
reconfirm entries, or Cancel to discard them.
Via the SX Tool
Under General Module, set Items AC01 - 8 (RI. 34-41).
Digital
Constants
Logic Result
Status:
There are 32 Digital Constants in the DX-9100. The value of each constant
can be set by the SX-9120 Service Module, GX-9100 Graphic
Configuration Tool, or BAS, and used in a logic connection to provide a
logic value for a programmable function module, output module or PLC
module. In a Version 2 controller, the digital constants may also be set at
the front display panel. These values are not located in EEPROM and
therefore can be written to via the BAS.
Via the GX Tool
Select PM from the toolbar, and then Digital Constants. A DCO module
(box) appears. Place it where desired on screen. Select DCO. Then select
Data in the module menu. Enter the values as required. Select OK to
reconfirm entries, or Cancel to discard them.
Via the SX Tool
Under General Module, set Items LCOS1 and LCOS2 (RI.10, RI.11).
LCOS1 is DCO1-16. LCOS2 is DCO17-32.
There are 64 Logic Result Status variables in the DX-9100 (in Version 1.0,
only 32 are available). The value of each status variable can be set by the
OUT, OUTNOT, SET, or RST instruction of the PLC module, and can be
used in a logic connection to provide a logic value for a programmable
function module, output module, or PLC module. The variables can also
be used to transmit status conditions to a BAS. These values are read only
and can only be changed by PLC execution.
Via GX Tool
Select PM from the toolbar, and then select LRS1-32 (or LRS33-64). A
module (box) will appear. Place it as desired on screen. Connections can
be made in the usual way. (See Configuration Tools - Making Connections
earlier in this document.)
Configuration Guides—DX-9100 Configuration Guide
41
Page 42

Via SX Tool
Under General Module, the logic result status variables can be read at
Items LRST1, LRST2, LRST3, and LRST4 (RI.08, RI.09, RI.44, RI.45).
LRST1 is LRS1-16. LRST2 is LRS17-32. LRST3 is LRS33-48. LRST4 is
LRS 49-64.
Analog
Constants,
Digital
Constants Note
GX Labels
Extension Module Configuration
The analog and digital constants can be read and modified
(Versions 2 and 3) from the DX front panel. See Display Panel and
Keypads in the DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
Source Points (Outputs)
ACOn The current value of an analog constant set by a supervisory
system, the GX Tool, SX Tool, or on the DX front panel.
DCOn The current value of a digital constant set by a supervisory
system, the GX Tool, SX Tool, or on the DX front panel.
LRSn The logic result status of an OUT, OUTNOT, SET, or RST
statement in a PLC.
Destinations Points
None.
Note: The XTM-905 extension module may be connected to DX
controllers, Versions 1.4, 2.3, 3.3, or later, and is configured,
monitored and controlled using the same Items as the XT-9100
extension module.
The parameters for the configuration of inputs and outputs in extension
modules reside partly in the DX-9100 Controller and partly in the
XT-9100 or XTM-905 Extension Module.
The parameters required by the DX-9100 Controller are described in detail
in this manual. For details on the extension modules, refer to the
XT-9100 Technical Bulletin (LIT-6364040) and the XT-9100
Configuration Guide (LIT-6364050), or the XTM-905 Extension Module,
XPx-xxx Expansion Modules Technical Bulletin (LIT-6364210).
42
Configuration Guides—DX-9100 Configuration Guide
Page 43

Each extension module is defined by the following parameters:
• input and output types, and XT/XTM layout map
• extension module address
• sources (connections) for outputs
• high and low ranges for analog outputs
• high and low limits for analog inputs
XT/XTM: Type,
Mode, and Map
Via the GX Tool
The I/O type and map details are automatically generated by the GX-9100
Graphic Configuration Software when all I/O data for extension modules
has been entered, and can be downloaded to the DX-9100 and also to the
extension modules when connected to the DX-9100 via the XT Bus.
Select PM from the toolbar, then XT or XTM and the appropriate
input/output type. A module (box) appears. Place it where desired on
screen. The inputs and outputs for the XT/XTM appear on the left and
right sides of the screen, respectively. Configure each input/output as
appropriate (similarly to DX I/O).
A module labeled XTn or XTMn will be for the points in the first XP
connected to that XT or XTM. If a second XP is connected, the EXP
module must be defined immediately following the first XT or XTM.
An EXPn is always an expansion to the XTn-1 or XTMn-1 module.
Configuration Guides—DX-9100 Configuration Guide
43
Page 44

Via the SX Tool
The I/O types and map are configured in Extension Module Items, under
XT Modules at XTnIOMAP (RI.00), XTnIOTYP (RI.01), and
XTnIOMOD (RI.02).
The I/O map (XTnIOMAP) defines which inputs/outputs (in pairs) on the
extension module are used and hence monitored or controlled by the
DX-9100. Eight extension modules can be defined, each with eight used
points, which normally reside on the first Expansion Module XP1
(I/O Points 1-8), defined in bits X1-4.
When an extension module has a second expansion module, XP2, with a
further eight points, these points must be defined in bits X5-8. However, in
this case, the next extension module in numerical sequence cannot be
configured because the DX-9100 will use the database area reserved for
the I/O points of the next extension module for the points of XP2 in this
extension module. For example, if Extension Module 1 (XT1 or XTM1)
has only one expansion module, XP1, all the points of XP2 will be
declared as not used (bits X5-8 set to 0) and Extension Module 2 can be
configured. However if Extension Module 1 has two expansion modules
and some points in XP2 are declared as used (one or more bits of X5-8 set
to 1), then Extension Module 2 (XT2 or XTM2) cannot be configured and
all its points must be declared as not used (bits X1-8 set to 0).The I/O type
(XTnIOTYP) defines which inputs/outputs (in pairs) are analog and which
are digital. As the points on XP2 (if used) must be digital, only bits X1-4
can be configured.
The I/O mode (XTnIOMOD) defines points as input or output (in pairs).
Only those points declared as used in Item XTnIOMAP will be monitored
or controlled.
The combination of data in the Items XTnIOMAP, XTnIOTYP, and
XTnIOMOD completely defines the configuration of an extension module.
An identical set of data must be entered into the Item database in the
XT-9100 or XTM-905 extension module, so that when the DX-9100 and
XT/XTM are connected and started up, the DX-9100 compares databases
and only send commands to the extension module if the data is identical,
thus avoiding incorrect control actions. If the databases are not identical,
Item XTnST, bit X6 (XTnERR) will be set. If the physical hardware of the
XT/XTM module does not correspond to the database, Item XTnST,
bit X4 (XTnHARD) is set.
44
Configuration Guides—DX-9100 Configuration Guide
Page 45

XT/XTM:
Address, User
Name,
Description
The extension module address is set as an 8-bit integer (1-255). This
address must also be set on the address switches of the extension module,
and must be unique not only on the XT-Bus, but also on the N2 Bus
(or Bus 91) to which the DX-9100 is connected. An extension module
address of 0 is not permitted on the XT Bus.
Via the GX Tool
Select XTn. Then select Data in the module menu. Enter the user name
and description in the window that appears. In the Hardware Address field,
enter the address set on the XT-9100 or XTM-905 module (a number between
1 and 255).
Via the SX Tool
The extension module address is set under XT Modules, in
Item XTnADX (RI.03).
XT/XTM: Source
Only output points require a source connection. For analog outputs the
source must define a numeric variable, and for digital outputs the source
must define a logic variable. Inputs and outputs appear on the left and right
sides of the screen, respectively.
Via the GX Tool
Expand source and destination modules. Position the cursor on the source
point. Press the mouse button, and while keeping it pressed, drag the
cursor to the destination point. Release the mouse button to make the
connection.
Via the SX Tool
The sources for the points declared as outputs in XP1 of XTn or XTMn are
entered under XT Modules at Items XTnI1@-8@ (RI.04-11). The sources
for the points declared as outputs in XP2 of XTn (if used) are entered in
Items XT(n+1)I1@-8@ in the next extension module Item area (n+1). All
points in this next module must already have been declared unused.
Configuration Guides—DX-9100 Configuration Guide
45
Page 46

XT/XTM: High
and Low Ranges
for Analog
Outputs
For analog outputs, the Analog High Range (AHR) defines the level of the
source control signal that will correspond to the maximum output at the
extension module, and the Analog Low Range (ALR) defines the level of
the source control signal that corresponds to the minimum output at the
extension module.
The value of the output is defined as follows:
If XTnALR XTnI XTnAHR XTnAO
If XTnI < XTnALR XTnAO = 0%
If XTnI > XTnAHR XTnAO = 100%
<< =
x XTnI XTnALR
100 ( )
XTnAHR XTnALR
()
−
−
Where XTnI is the value for the source control signal.
Via the GX Tool
Select the XT analog output point module. Then select Data in the module
menu. Enter appropriate values within the range of the source signal under
both the High Range and Low Range fields:
High Range =
Low Range =
Also enter the appropriate value in the Type of Output field.
Via the SX Tool
Under XT Modules, set the following Items:
Analog High Range = Items XTnAHR1-8 (RI.12-26, evens)
Analog Low Range = Items XTnALR1-8 (RI.13-27, odds)
XT/XTM: High
and Low Limits
for Analog
Inputs
The high limit and the low limit define at which levels the analog input
reading will generate an alarm for remote monitoring purposes or for
internal use within the control sequences in the DX-9100.
These limits will be automatically downloaded to the extension module by
the DX-9100.
46
Configuration Guides—DX-9100 Configuration Guide
Page 47

Via the GX Tool
Select the XT analog input point module and choose Active or Passive.
Then click the right mouse button to call up the module menu and select
Data. In the window that appears, enter appropriate values under both the
High Limit and Low Limit fields:
High Limit=
Low Limit =
Via the SX Tool
Under XT Modules, set the following Items:
High limit = Items XTnHIA1-8 (RI.28-42, evens)
Low limit = Items XTnLOA1-8 (RI.29-43, odds)
XT Bus Timing
XT/XTM Notes
The timeout on the XT Bus for the response to a message is set according
to whether XT-9100 or XTM-905 extension modules are connected.
Via the GX Tool
The timing is set automatically by the GX Tool.
Via the SX Tool
Under General Module, Item DXS1 (RI.32) set the following bits:
X6X5 = 00 XT-9100 extension modules only
X6X5 = 01 XTM-905 extension modules (or both XT-9100 and
XTM-905)
1. XT/XTM analog input values can be read, and alarm limits read and
modified from the DX front panel. See Display Panel and Keypads
in the DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
2. On the SX Tool, analog input values can be read under XT Modules
at Items XTnAI1-8 (RI.45-52). Only those points configured as
analog inputs will be active.
3. Analog outputs can be read and overridden (put in hold) at the DX
front panel. See Display Panel and Keypads in the DX-9100 Extended
Digital Controller Technical Bulletin (LIT-6364020) in
FAN 636.4 or 1628.4.
4. On the SX Tool, analog output values can be read in percent under
XT Modules at Items XTnAO1-8 (RI.53-60). Only those points
configured as analog outputs, and with the type of output defined, will
be active.
Configuration Guides—DX-9100 Configuration Guide
47
Page 48

5. On the SX Tool, the total pulse count of digital inputs on XP1 can be
read and reset under XT Modules at Items XTnCNT1-8 (RI.61-68).
Only those points configured as digital inputs will show a correct
value.
6. Output hold control and status can be seen on the SX Tool under
XT Modules at Items XTnOUH1-8 (bits X1-8 of Item XTnHDC
[RI.69]). Analog and digital outputs can be modified by a BAS when
in Hold mode.
7. XT/XTM digital outputs can be read and overridden (put in hold)
from the DX front panel. See Display Panel and Keypads in the
DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
8. Digital output control and status can be seen on the SX Tool under
XT Modules at Items XTnDO1-8 (bits X1-8 of Item XTnDO
[RI.70]). Only those points configured as digital outputs will be
active.
9. XT/XTM digital inputs can be read from the DX front panel. See
Display Panel and Keypads in the DX-9100 Extended Digital
Controller Technical Bulletin (LIT-6364020) in FAN 636.4 or 1628.4.
10. Digital input status can be seen on the SX Tool under XT Modules at
Items XTnDI1-8 (bits X1-8 of Item XTnDI [RI.71]). Only those
points configured as digital inputs will be active.
11. Extension module alarm status from analog inputs can be seen on the
SX Tool under XT Modules at Items XTnAIH1-XTnAIL8
(bits X1-16 of Item XTnAIS [RI.44]).
Note: The Alarm Disable connection, described under AI: Alarm Limits,
does not disable XT module alarms. XT/XTM alarms are only
indicated by the AL LED on the DX front panel when the
XT/XTM is selected for display of analog values.
48
Configuration Guides—DX-9100 Configuration Guide
Page 49

12. Extension module local status can be seen on the SX Tool under
XT Modules at Item XTnST (RI.72) in the following bits:
X1 = 1 XTnCOM XT/XTM module not answering (wrong
address, bus line broken, bus line overload).
X3 = 1 XTnMIS XT databases in DX and XT/XTM do not
match.
X4 = 1 XTnHARD XT/XTM hardware failure (XT/XTM cannot
find correct XPs; hardware missing or not
responding).
X5 = 1 XTnSEL XT/XTM selected on XT-Bus.
X6 = 1 XTnERR XT/XTM configuration error XTnCOM = 1
or XTnMIS=1 or XTnHARD = 1
(Versions 1.4, 2.3, 3.3, or later)
X7 = 0 XTnFAIL XT/XTM digital outputs set to 0 on
communication failure.
X7 = 1 XT/XTM digital outputs hold current state
on communication failure. Read from XT
module. See the XT-9100 Configuration
Guide (LIT-6364050) or the XTM-905
Extension Module, XPx-xxx Expansion
Modules Technical Bulletin (LIT-6364210).
X8 = 1 XTnPWR XT/XTM detected loss of power or loss of
communication.
Item X8 is automatically reset by the DX-9100 Controller after a few
seconds.
Configuration Guides—DX-9100 Configuration Guide
49
Page 50

GX Labels
Source Points (Outputs)
XTnAIn The current value of the analog input from the XT/XTM.
XTnAIHn A 1 if the analog input is above its high limit and not below
the high limit - limit differential.
XTnAILn A 1 if the analog input is below the low limit and not above
the low limit + limit differential.
XTnAOn The value of the analog output to the XT/XTM.
XTnCOM A 1 when the extension module is not communicating
(wrong address, bus line broken, or bus line overload).
XTnDIn The current status of the digital input from the XT/XTM.
XTnDOn The status of the digital output to the XT/XTM.
XTnERR A 1 when the XT database in the DX does not match the
XT database in the XT/XTM module, or when XTnCOM is
a 1, or when XTnHARD is a 1 (Versions 1.4, 2.3, 3.3,
or later). (Combination of errors for XT/XTM module.)
XTnFAIL The status of the Fail mode in the XT/XTM. A 0 indicates
that outputs go to 0 on communication failure and a 1
indicates that the status of the outputs will be maintained.
XTnHARD A 1 when the expansion module is not connected or not
responding (hardware fault), or a module type does not
match what was configured (for example, when an XP-9102
is configured and an XP-9103 is connected).
XTnOUHn A 1 when an analog or digital output is in Hold mode from
either the DX front panel or BAS.
XTnPWR A 1 when the extension module detects a loss of power or
loss of communication. The DX will reset this after a few
seconds.
Destination Points (Inputs)
AO@ The numeric connection to control an analog output.
DO@ The connection to control a digital output.
50
Configuration Guides—DX-9100 Configuration Guide
Page 51

Network Analog Input Configuration (Version 3 Only)
The controller has 16 network analog input modules, each contains a
numerical value received from an analog output in another controller on
the same LONW
N2 Bus. These inputs can be used in the
ORKS
configuration in the same way as physical analog inputs. The source of
the analog data is defined in the transmitting controller.
User Tag Name
and Type
For each network analog input module one must define:
• User Tag Name and Description
• Network Analog Input Units (SX Only)
Via the GX Tool
Select PM from the toolbar, then Network Analog Input, and place the
NAIn on the screen. Select NAIn and Data. Enter the User Name and
Description in the Data Window. The Units number is automatically set by
the GX Tool.
Via the SX Tool
To configure a network analog input using the SX Tool, it is necessary
to enter the units of the NAI in Item NAInDIM (RI.18 to RI.33)
under NETWORK (Key 8), INPUT MODULES, and
2 (NETWORK AI MOD). There is only one unit used by the DX-912x,
which is number 55. It is also necessary to change Item NAIN (RI.04)
under NETWORK and GENERAL MODULE when the first NAI is
defined. This Item must be set to 1 if any NAIs are used in the
configuration. These Items are automatically set by the GX Tool when the
NAI is created.
NAI Notes
1. On the SX Tool the numeric value of the network analog inputs can
be read at Items NAIn (RI.01 to RI.16) under NETWORK and
INPUT MODULES.
2. On the SX Tool the Reliability Status of each analog input module
can be seen on bits X1 to X16 at Item NAISTA (RI.17). These status
indications can be used for backup control strategies in the case of a
transmission failure by using the corresponding logic variables
(NAIU1 to NAIU16) in the PLC. The Reliability Status will be set
to 1 (Unreliable) when the DX Controller does not receive a new
value over the network within a period of approximately 200 seconds.
Configuration Guides—DX-9100 Configuration Guide
51
Page 52
GX Labels
Source Points (Outputs)
NAIn The current value of the Network Analog Input.
NAIUn A 1 when the analog input module is unreliable.
Destination Points (Inputs)
None.
Network Digital Input Configuration (Version 3 Only)
User Tag Name
and Type
The controller has 8 network digital input modules, each contains
16 digital input status values received from a network digital output in
another controller. Each of the 16 digital values in the digital input module
can be used in the configuration in the same way as physical digital inputs.
The source of the digital data is defined in the transmitting controller.
Digital data is always transmitted in blocks of 16 values from 1 controller
to another and the block cannot be split apart by the network. Not all
16 values need be used and within the controller the values can be used
quite independently.
For each network digital input module one must define:
• User Tag Name and Description
• Network Digital Input Type (SX Only)
Via the GX Tool
Select PM from the toolbar, then Network Digital Input, and place the
NDIn on the screen. Select NDIn and Data. Enter the User Name and
Description in the Data Window. The Type number is automatically set by
the GX Tool.
Via the SX Tool
To configure a network digital input using the SX Tool, it is necessary to
enter the type of the NDI in Item NDInTYP (RI.10 to RI.17)
under NETWORK (Key 8), INPUT MODULES, and
1 (NETWORK DI MOD.). There is only one type used by the DX-9100,
which is number 83. It is also necessary to change Item NDIN (RI.03)
under NETWORK and GENERAL MODULE when the first NDI is
defined. This Item must be set to 1 if any NDIs are used in the
configuration. These Items are automatically set by the GX Tool when the
NDI is created.
52
Configuration Guides—DX-9100 Configuration Guide
Page 53

NDI Notes
1. On the SX Tool the status values of the 16 digital inputs in each of the
8 network digital input modules can be read at bits X1 to X16 in
Items NDIn (RI.01 to RI.8) under NETWORK, INPUT MODULES,
and 1 (NETWORK DI MOD). The status values can be used in the
configuration by connecting the corresponding logic variables NDIn-1
to NDIn-16.
2. On the SX Tool the Reliability Status of each digital input module can
be seen on bits X1 to X8 at Item NDISTA (RI.9). These status
indications can be used for backup control strategies in the case of a
transmission failure by using the corresponding logic variables
(NDIU1 to NDIU8) in the PLC. The Reliability Status will be set to 1
(Unreliable) when the DX controller does not receive a new value
over the network within a period of approximately 200 seconds.
GX Labels
Network Analog Output Configuration (Version 3 Only)
Source Points (Outputs)
NDIn-m The current value of the Network Digital Input.
NDIUn A 1 when the digital input module is unreliable.
Destination Points (Inputs)
None.
The controller has 16 network analog output modules, each of which can
transmit a numerical value to another controller on the same LONW
ORKS
N2 Bus. The network analog output module receives its value from a
connection to a numeric Item in the same controller. Each network analog
output module, if configured, sends its value to up to 16 destinations
which are, in fact, network analog input modules in other controllers on
the same network. A maximum of 30 Version 3 controllers can be
connected to one LONW
ORKS
N2 Bus.
For each network analog output module one must define:
• User Tag Name and Description
• Network Analog Output Units (SX Only)
• up to 16 destinations (controller address and network input module
number)
• source of the output value
Configuration Guides—DX-9100 Configuration Guide
53
Page 54

User Tag Name
and Units
Via the GX Tool
Select PM, then Network Analog Output, and place the NAOn on the
screen. Select NAOn and Data. Enter the User Name and Description in
the Data Window. The Units number is automatically set by the GX Tool.
Via the SX Tool
When defining a network analog output module, it is necessary to enter the
units of the NAO in Item NAOnDIM (RI.03) under NETWORK (Key 8),
OUTPUT MODULES, and 2 (NETWORK AO MODn) (n = 1-16).
There is only one unit used by the DX-9100, which is number 55. It is also
necessary to change Item NAON (RI.02) under NETWORK and
GENERAL MODULE. This Item must contain the number (0 to 16) of
NAOs used in the configuration. These Items are automatically set by the
GX Tool.
NAO
Destinations
NAO Source
Via the GX Tool
Select NAOn and Data. In the field Destination #1 enter a destination
controller address (1-255) and a network input number (1-16) within the
destination controller. Continue entering destinations as required up to the
limit of 16. Only enter the address of controllers, which will be connected,
to the same LONW
N2 Bus and use a network analog input number in
ORKS
a destination controller only once in the configuration.
Via the SX Tool
Destinations are configured in Items NAOn>1 to NAOn>16
(RI.04 to RI.19) under NETWORK (Key 8), OUTPUT MODULES, and
2 (NETWORK AO MODn) (n = 1-16). Enter the Destination Input
number (NAI) (1-16) and Destination Controller Address (1-255). An
Input number of 0 cancels the destination.
Via GX Tool
Expand NAOn to show the input NAOnAO@. Expand the source module
with the desired output numeric Item and make the connection. The
connection source may be seen in the NAO Data Window in the field
Source Point.
Via SX Tool
Connections are defined in Items NAOn@ (RI.20) under NETWORK
(Key 8), OUTPUT MODULES, and 2 (NETWORK AO MODn)
(n = 1-16). Enter a numeric Item address.
54
Configuration Guides—DX-9100 Configuration Guide
Page 55
NAO Note
On the SX Tool the numeric value of the network analog outputs can be
read at Items NAOnOUT (RI.01) under NETWORK,
OUTPUT MODULES, and 2 (NETWORK AO MODn) (n = 1-16).
GX Labels
Network Digital Output Configuration (Version 3 Only)
Source Points (Outputs)
None.
Destination Points (Inputs)
NAOn@ The numeric connection to control a Network Analog Output.
The controller has 8 network digital output modules, each of which can
transmit 16 digital status values to another controller on the same
LONW
N2 Bus. Each of the 16 digital values in the digital output
ORKS
module receives its status from a logic variable in the same controller.
Each network digital output module, if configured, sends its 16 digital
status values as a block to up to 16 destinations which are, network digital
input modules in other controllers on the same network. A maximum of
30 Version 3 controllers can be connected to one LONW
ORKS
N2 Bus.
For each network digital output module one must define:
• User Tag Name and Description
• Network Digital Output Type (SX Only)
• up to 16 destinations (controller address and network input module
number)
User Tag Name
and Type
• sources of the 16 digital status values
Via the GX Tool
Select PM, then Network Digital Output, and place NDOn on the screen.
Select NDOn and Data. Enter the User Name and Description in the Data
Window. The Type number is automatically set by the GX Tool.
Via the SX Tool
When defining a network digital output module it is necessary to enter the
type of NDO in Item NDOnTYP (RI.03) under NETWORK (Key 8),
OUTPUT MODULES, and 1 (NETWORK NDO MODn) (n = 1-8).
There is only one type used by the DX-9100, which is number 83. It is also
necessary to change Item NDON (RI.01) under NETWORK and
GENERAL MODULE. This Item must contain the number (0-8) of
NDOs used in the configuration. These Items are automatically set by the
GX Tool.
Configuration Guides—DX-9100 Configuration Guide
55
Page 56

NDO
Destinations
Via the GX Tool
Select NDOn and Data. In the Data Window, select Data-2 to go to
page 2. In the field Destination #1 enter a destination controller address
(1-255) and a network input number (1 to 8) within the destination
controller. Continue entering destinations as required up to the limit of 16.
Only enter the address of controllers that will be connected to the same
LONW
N2 Bus and use a network digital input number in a
ORKS
destination controller only once in the configuration. All 16 source points
will be sent as a block to each destination defined.
Via the SX Tool
Destinations are configured in Items NDOn>1 to NDOn>16
(RI.04 to RI.19) under NETWORK (Key 8), OUTPUT MODULES,
and 1 (NETWORK DO MODn) (n = 1-8). Enter the Destination Input
number (NDI) (1-8) and Destination Controller Address (1-255). An Input
number of 0 cancels the destination.
NDO Sources
NDO Note
GX Labels
Via GX Tool
Expand NDOn to show the inputs NDOn-1@ to NDOn-16@. Expand the
source module with the desired output logic variable and make the
connection. The connection sources may be seen in the NDO Data
Window in the fields Source bit #1 to Source bit #16.
Via SX Tool
Connections are defined in Items NDOn-1@ to NDOn-16@
(RI.20 to RI.35) under NETWORK (Key 8), OUTPUT MODULES, and
1 (NETWORK DO MODn) (n = 1-8). Enter a logic variable index byte
and bit number.
On the SX Tool, the 16 status values of each of the 8 network digital
output modules can be read at Items NDOn (RI.01) under NETWORK,
OUTPUT MODULES, and 1 (NETWORK DO MODn) (n = 1-8).
Source Points (Outputs)
None.
Destination Points (Inputs)
NDOn-m@ The logic connection to control a Network Digital Output.
56
Configuration Guides—DX-9100 Configuration Guide
Page 57

Programmable Function Module Configuration
The DX-9100 provides twelve programmable function modules that are
sequentially executed each second. The module’s function, inputs, and
outputs depend on the algorithm assigned to it. The assignment is made by
programming the module to correspond to the algorithm. Once the PM is
defined to perform a specific function, the remaining entries of the module
can be defined to achieve the desired output.
Parameter Tags
Each of the twelve programmable function modules has a set of generic
parameters, each with a PM Tag.
Each of the available algorithms has a specific set of parameters, each with
an algorithm tag (Alg. Tag).
When an algorithm is assigned to a programmable function module, a
parameter has two tags:
• one PM Tag, which represents the generic function in the
programmable function module
• one Alg. Tag, which represents the specific function of the parameter
in the assigned algorithm
For example, the process variable connection in a PID control algorithm
assigned to Programmable Function Module 1 has a generic tag, PM1I1@.
In Algorithm 1 (PID controller) this same parameter has the tag PV@.
Both tags are listed in the Item list for the algorithms; one as PM Tag and
the other as Alg. Tag.
Note: In the GX Tool, algorithm tags are used exclusively. When
mapping Items to a BAS, such as Metasys PM tags are used.
Control
Algorithm
Configurations
The DX-9100 provides four control algorithms:
• PID Controller
• On/Off Controller
• Heating/Cooling PID Controller (Dual PID)
• Heating/Cooling On/Off Controller (Dual On/Off)
Each of these algorithms can be used in any one of the
twelve programmable function modules.
The algorithms have a number of different operating modes, which are a
function of operating parameters and digital connections.
Each control module operates from its Working Setpoint (WSP), which is
a resultant value calculated by the controller from the Reference Variable
(RV), the Local Setpoint (LSP), the Remote Setpoint (RSP), the
Standby Mode Bias (BSB), and the Off Mode Bias (BOF).
The algorithm then compares the Working Setpoint (WSP) with the
Process Variable (PV) to generate an output (OCM).
Configuration Guides—DX-9100 Configuration Guide
57
Page 58

• Comfort mode (or Occupied mode) is the working mode of the
algorithm to obtain the desired control typical during occupancy. The
output is calculated by the control algorithm using as working setpoint
the value:
WSP = RV * (LSP + RSP)
This mode is active when both Standby and Off modes are disabled.
• When operating in Standby mode the controller setpoint may be
reduced or increased when compared with the Comfort mode setpoint.
The output is calculated by the control algorithm using as working
setpoint the value:
WSP = RV * (LSP + RSP) + BSB
This mode is active when the standby module control connection is a
Logic 1 and the Off mode is disabled.
The standby bias is a signed number, expressed in the same units as
the PV.
• Off mode (Unoccupied mode) is similar to the Standby mode, but the
setpoint may be further reduced or increased. The output is calculated
by the control algorithm using the following function:
WSP = RV * (LSP + RSP) + BOF
This mode is active when the Off mode control connection is a
Logic 1.
The off bias is a signed number, expressed in the same units as the
PV.
In the Off mode, the output low limit of the controller is not used and
the output can fall to 0.
If both Standby and Off modes are active, the control module uses the
Off mode working setpoint.
58
Configuration Guides—DX-9100 Configuration Guide
Page 59

Via the GX Tool
Before establishing the mode, you must first set the PM type to Control
and then to the appropriate type. Click on PM in the toolbar, select
Control, then PID, On/Off, Dual PID, or Dual On/Off, and position the
module (box) on the screen. Select the module and then Data to call up the
Data Window. Enter control parameters and modes.
To go to page 2, click on Data 2. At Standby Bias (BSB) or Off mode
Bias (BOF), enter a value to bias the WSP. For Dual PID or Dual On/Off
modules, enter values for each loop at Stdby Bias #1 (BSB1), Off Bias #1
(BOF1), Stdby Bias #2 (BSB2), and Off Bias #2 (BOF2).
To define the mode connections, expand source and destination modules.
Position the cursor on the source point. Press the mouse button, and while
keeping it pressed, drag the cursor to SB@. Release the mouse button to
make the connection. For Off mode, make a similar connection between
the respective source point and OF@.
When the connected logic variable is in a 1 state, the value entered will be
used to calculate the WSP of the module. The WSP is always the active
setpoint of the module.
Via the SX Tool
Define the PM type under Program Modules PMnTYP (RI.00):
1 = PID Controller
2=On/Off
3=Dual PID
4 = Dual On/Off
Then set the modes of operation under Program Modules:
PMnOF@ (RI.14) defines the Off mode control logic connection.
PMnSB@ (RI.15) defines the Standby mode control logic connection.
BSB1 (RI.30) defines the bias value during Standby mode in Loop 1.
BOF1 (RI.31) defines the bias value during Off mode in Loop 1.
For Dual PID and Dual On/Off only:
BSB2 (RI.47) defines the bias value during Standby mode in Loop 2.
BSF2 (RI.48) defines the bias value during Off mode in Loop 2.
The mode status of the controller can be read at Item PMnST (RI.72) as
follows:
X13 = Standby Mode (SB)
X12 = Off Mode (OF)
Configuration Guides—DX-9100 Configuration Guide
59
Page 60

Remote Mode
In Remote mode, the local setpoint is excluded from the calculation of the
working setpoint, and the WSP cannot be modified from the front panel of
the controller.
Via the GX Tool
Select the defined PMn, then Data in the module menu. At the
Remote mode: (0 = N) = field, enter 0 or 1:
If 0, the module will calculate from: WSP = RV * (LSP + RSP) + bias
If 1, the module will calculate from: WSP = RV * (RSP) + bias
Via the SX Tool
Under Program Modules, select the PID Module and set bit X8 in
Item PMnOPT (RI.01):
X8 = 0 No Remote mode.
X8 = 1 Remote mode enabled.
Minimum/
Maximum
Working
Setpoint
For the DX-9100, Version 1.1 or later, the calculated WSP value cannot
lie outside of limits set either by numeric connections or entered
parameters. If there are no connections, the values entered at Minimum
Working Setpoint and Maximum Working Setpoint will be used. When
modifying the WSP from the front panel of the controller, it is not possible
to set a value for WSP, which lies outside of the set limits.
Via the GX Tool
Select the defined PMn. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Minimum WSP (MNWS)
and Maximum WSP (MXWS) fields, enter values to not exceed the
working setpoint. To use source points for MNWS and MXWS, connect
the respective source points to MNWS@ and MXWS@. The values of
source points will take priority over entered values.
Via the SX Tool
Under Program Modules, select the PID modules and set the following:
MNWS@ (RI.22) defines numeric connection for Min. WSP.
MNWS (RI.35) defines the numeric value of Min. WSP.
MXWS@ (RI.23) defines the numeric connection for Max. WSP.
MXWS (RI.42) defines the numeric value for Max. WSP.
60
Configuration Guides—DX-9100 Configuration Guide
Page 61

Output Forcing
Actions
Commands from a BAS or connections to logic variables may override the
output calculated by the control algorithm, forcing it to a preprogrammed
level of 0 or 1 for On/Off algorithms and 0-100% for PID algorithms.
While forcing is active, the module will stop calculating until forcing is
disabled. Each forcing condition is associated with an output forcing level.
The possible forcing conditions, ordered in priority, are:
• Shutoff mode (BAS only)
• Startup mode (BAS only)
• External Forcing mode
The function of each mode may be individually enabled in each control
module.
The configuration of startup and shutoff are also described under
Supervisory Mode Control Settings (General Module).
External Forcing
With External Forcing mode, the control module output will assume a
configured forcing level between 0 and 100% for PID algorithms and of
0 or 1 for On/Off algorithms, overriding the output limits of the control
module.
Via the GX Tool
Expand source and destination modules. Make a connection between the
source point and EF@ in the destination model. When the connection is
a 1, the output will go to the value specified at ExtForce Out Level
(provided Shutoff and Startup are not active).
Select the defined PMn. Then select Data in the module menu. For a PID
module, at the ExtForce Out Level (EFL) field, enter the desired level as
a number in percent of output. For On/Off modules at the ExtForce Out
Level field enter 0 for Off and 1 for On.
Configuration Guides—DX-9100 Configuration Guide
61
Page 62

Via the SX Tool
External forcing is a software connection, which is configured by entering
the source address of the selected logic variable under Program Modules,
at the Alg. Item location EF@ (RI.17) of the defined PID module.
The forcing level for PID controllers is read and modified at the Item
location EFL (RI.59) of the defined PID module.
The forcing level for On/Off controllers is entered at Item location OPT,
bit X6:
X6 = 1 = On
X6 = 0 = Off
The status of the modes can be seen at Alg. Item PMnST (RI.72) follows:
X9 = Shutoff mode (SOFF)
X10 = Startup mode (STUP)
X11 = External Forcing (EF)
Programmable
Module Notes
1. The WSP, off mode bias, and standby bias can be read and modified
by the DX front panel. See Display Panel and Keypads in the
DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
2. For control module operations refer to Algorithms 1-4 in this
document.
3. For details of the Hold mode and Computer mode, refer to
Supervisory Mode Control Settings (General Module) later in this
document.
4. When the PID algorithm is using integral action, forcing actions to
either a PID or a connected AO will modify the integral term (I Term)
such that the internally calculated output of the control module is
equal to the forced value. This provides bumpless transfer when the
forcing is removed. In other words when the forcing is removed, the
output does not immediately change, but integrates to the new control
output value. If there is another module between the PID module and
the AO (a high selected, for example) and the AO is overridden, the
I Term will not be modified.
62
Configuration Guides—DX-9100 Configuration Guide
Page 63

Control Algorithm Theory
The DX executes all modules and all of its calculations once every
second. The calculations below assume that the output low/high limits are
0 to 100.
Proportional
Control
Algorithm
HHDA HDA
OB
@
OB
PB@
PV@
RV@
RS@
OF@
SB@
RA@
EF@
PB
PV
RV
RS
LSP
REM
OF
SB
RA
EF
Supervisory Modes:
LDA
F (Modes,
BSB,BOF)
CMP STAE SOFE
Computer
CML EF STA SOF HOLDLLDA CMH
WSP
Start Up Shut Off
f=(PB,TI,TD,EDB)
Limiti ng
And
Forcing
Hold
HIL
LOL
Figure 7: Control Module Block Diagram
The PID algorithm is defined by the following equations:
The standard proportional control algorithm is as follows:
P. Output = (100/PB) * Deviation + output bias (OB)
Where:
OCM
Output
Dxcon007
P. Output = proportional output of control module in %
PB = Proportional Band, defined as the amount of change in the
process variable, that produces a change of 0 to 100 on the
output of the control module
Deviation = the difference (error) of the Process Variable (PV) and the
Working Setpoint (WSP)
With proportional control, the deviation (or control error) is at zero only
when the output bias value matches the output value required to attain the
setpoint under the actual load conditions.
Configuration Guides—DX-9100 Configuration Guide
63
Page 64

Integral Control
Algorithm
When using the integral (reset action) in a PID control module, the
proportional output is increased or decreased by the integral output which
is determined through the following mathematical relationship:
Derivative
Control
Algorithm
I. Output
= I. Output
(t)
+ (Proportional Output * TI *[1/60])
(t-1)
Where:
I. Output
I. Output
(t)
(t-1)
= Current integral output
= Previous integral output
TI = Reset action, expressed in repeats of proportional
control response per minute
Reset action is used to compensate for the deviation (or error) in
proportional control and reduces the deviation towards zero over time.
The integral computation is stopped as soon as the control module output
calculates its high or low output limits.
An integral time of zero disables the integral action.
The output of a PI algorithm is:
PI Output = P. Output + I. Output
Although the PI Output is normally limited to 0-100, the P. Output and
I. Output can individually be a negative number.
When using the derivative action (rate action) in a PID control module, the
0-100 output is modified through the following mathematical calculation:
D. Output
= [(PV
(t)
(t)
- PV
) * CD] + (D. Output
(t-1)
(t-1)
* BD)
Where:
D. Output
D. Output
PV
(t)
PV
(t-1)
= Current Derivative Output
(t)
= Previous Derivative Output
(t-1)
= Current Process Variable in % of input range
= Previous Process Variable in % of range
BD = (60 * TD) / [4 + (60 * TD)]
CD = 120 * TD * (1 - BD) * 100/PB
TD = Rate action: a time constant determining the rate of
decay of the derivative output to ensure stable control.
Rate action is the braking response in case approach to the setpoint is too
rapid and may pass, or the accelerating response in case the deviation from
the setpoint is too rapid and may not be corrected quickly enough by PI
control.
64
Configuration Guides—DX-9100 Configuration Guide
Page 65

Algorithm 01 PID Control
Module
Most commercial HVAC applications will not require derivative action.
A rate action equal to zero disables the derivative term.
The output of a PID algorithm is:
PID Output = P.Output + I.Output + D.Output
Setting
Supervisory
Control Options
These options are a series of parameters that define how the PID Control
Module operates and reacts to BAS commands. For more information,
refer to Supervisory Mode Control Settings (General Module) later in this
document.
Via the GX Tool
Select the defined PID module. Then select Data in the module menu.
At the Ena Shutoff: 0=N field, enter a 1 to enable this function.
At the Shutoff Out Level field, enter a value for the output to go to if
Ena Shutoff = 1 and the BAS has set Shut off in the controller.
At the Ena Startup: 0=N field, enter a 1 to enable this function. At the
Startup Out Level= field, enter a value for the output to go to if Ena
Startup = 1 and the BAS has set Startup in the controller.
At the Ena Off Trans: 0=N field, enter a 1 if the module is required to
operate in Off mode when the BAS has set Shutoff and the process
variable is below the Off mode working setpoint (WSP). This is only used
in reverse acting modules (negative proportional band) for heating
applications for low temperature protection.
Via the SX Tool
These parameters are defined under Program Modules at PM Item
PMnOPT (RI.01) of the PID module, with the following bit structure:
X1 = 1 SOFE Enable Shutoff mode from BAS
X3 = 1 STAE Enable Startup mode from BAS
X9 = 1 SOTO Enable Shutoff to Off Change
Configuration Guides—DX-9100 Configuration Guide
65
Page 66

Process Variable
Connection PV@
The Process Variable (PV) is an analog value connection to the control
module. When the process variable is not equal to the setpoint, the
controller responds by changing its output value in accordance with the
PID parameters.
Via the GX Tool
Make a connection between the source point and PV@ in the destination
control module.
Via the SX Tool
Under Program Modules, configure the software connection by entering
the source address of the selected process variable at the PV@ Item
(RI.10) location in the defined PID module.
Remote Setpoint
Connection RS@
Reference
Variable
Connection RV@
The Remote Setpoint (RSP) is an analog variable in the control module,
in units of PV, which produces a bias in the local setpoint. If the input is
not connected, the controller will use the default value 0.
WSP = RV (RSP + LSP) + (bias)n
Via the GX Tool
Make a connection between the source point and RS@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected remote setpoint at the RS@ Item (RI.11) location in the defined
PID module.
The Reference Variable (RV) is an analog variable to the control module,
which causes the control module to perform as a ratio controller. Its effect
is a multiplier in the working setpoint calculation. If the input is not
connected, the controller will use the default value 1.
WSP = RV (RSP + LSP) + (bias)n
Via the GX Tool
Make a connection between the source point and RV@ in the destination
control module.
66
Configuration Guides—DX-9100 Configuration Guide
Page 67

Via the SX Tool
The software connection is configured by entering the source address of
the selected reference variable at the RV@ Item (RI.12) location in the
defined PID module.
Proportional
Band
The proportional band is a number that defines the action and sensitivity of
the control module. A negative number defines a reverse acting control
module; an increase of the process variable produces a decrease in the
output signal. A positive number defines a direct acting control module; an
increase of the process variable produces an increase in the output signal.
The number itself is an analog input connection (PB@) or value (PB) that
is expressed as a percentage of the process variable range. When the
process variable is one of the eight analog inputs to the DX-9100
Controller, the PV range is the range of the active analog input or the
control range of the passive analog input. Otherwise, the range defaults
to 0-100 (including all XP analog inputs). The connection is used for an
application requiring a dynamic proportional band, and if this input is not
connected, the controller will use the proportional band value of PB.
The number itself defines the percentage of the process variable range
change that will produce a full output signal change. For example, if the
process variable has a control range of 0 to 100, a proportional band of 2%
indicates that a change of 2 in the process variable will cause the control
module output signal to change by 100%. If the process variable range is
0-40, a proportional band of 10% indicates that a change of 4 in the
process variable will cause the control module output signal to change by
100%.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Proport. Band (PB) field,
enter the required value.
Alternatively, make a connection between the source point and PB@ of
the control module.
Via the SX Tool
Under Program Modules, select the PID module. The software
connection is configured by entering the source address of the selected
proportional band at the PB@ Item (RI.13) location in the defined PID
module; or, enter a value for the proportional band at the PB Item (RI.27)
location.
Configuration Guides—DX-9100 Configuration Guide
67
Page 68

Reverse Action
Connection RA@
The Reverse Action Connection is a logic input to the control module,
which changes its action from direct to reverse or vice versa.
If the input is not connected, the controller uses the default value 0 and the
function is disabled such that the defined action in PB is always used. The
reverse action connection should not normally be used when the controller
is configured as symmetric.
The DX front panel will not show that the PB has been reversed by this
connection.
Via the GX Tool
Make a connection between the source point and the RA@ point of the
destination control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected reverse action logic variable at the RA@ Item (RI.16) location in
the defined PID modules.
Output Bias
The Output Bias Connection or OB@ is an analog input to the control
module which biases the value of the output. If the input is not connected,
the controller uses the output bias value OB. This option is normally used
in a proportional-only control module where the value of OB determines
the output of the control module when the PV is equal to the WSP.
Via the GX Tool
Make a connection between the source point and the OB@ destination
point.
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Output Bias (OB) field,
enter a value from 0 to 100. In a P-only controller, this will be the output
value when PV = WSP.
Via the SX Tool
Configure the software connection by entering the source address of the
selected output bias at the OB@ Item (RI.20) location. Alternatively, enter
the output bias value at the OB Item (RI.34) location.
68
Configuration Guides—DX-9100 Configuration Guide
Page 69

Local Setpoint
The local setpoint or LSP is a value that represents the basic setpoint of the
control module. It is a number that should be within the range of the
process variable. The LSP is disabled (ignored) in Remote mode. When a
WSP adjustment is made from the front panel, it is the LSP that is actually
changed according to the formula below:
WSP = RV (RSP + LSP) + bias
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Local Setpoint (LSP) field,
enter the setpoint of the module.
To enable the Remote mode, enter a 1 at the Remote mode: 0 = N field.
If 1, the setpoint will be calculated as follows:
WSP = RV (RSP) + bias
Via the SX Tool
Under Program Modules, select the PID module and enter a value for the
local setpoint at the LSP Item (RI.26) location. To enable the Remote
mode, set Alg. Item REM (RI.01), bit X8 to 1.
Reset Action
Reset action or TI is a number that defines the integration time for
proportional-integral type control modules and is expressed in repeats per
period of 1 minute, between 0 and 60, with one decimal place. The integral
time Tn may be computed from this number using the formula: Tn = 1/TI.
Reset action should normally be set to 0 for symmetrical action
controllers.
Note: To clear the reset action from the DX front panel, set the value to
any negative number.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Reset Action (TI) field,
enter a value between 0 and 60.
Via the SX Tool
Under Program Modules, select the PID module and enter a value for the
reset action at the TI Item (RI.28) location. A zero number and all
negative numbers will disable the integral action of the controller.
Configuration Guides—DX-9100 Configuration Guide
69
Page 70

Rate Action
Rate action or TD defines the derivative action decay time parameter and
is entered in minutes, between 0 and 5, with one decimal place. Rate
action should normally be set to 0 for symmetrical action controllers.
Note: To clear the rate action from the DX front panel, set the value to
any negative number.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Rate Action (TD) field,
enter a value between 0 and 5.
Via the SX Tool
Under Program Modules, select the PID module and enter a value for the
rate action at the TD Item (RI.29) location. A zero number and all negative
numbers will disable the rate action of the controller.
Output High
Limit
Output Low
Limit
The High Limit or HIL is a number in percent of the output, which defines
a high limit value for the control module output. The default value is 100,
and must always be higher than the low limit.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Out High Lmt (HIL) field,
enter the high limit in terms of percentage.
Via the SX Tool
Enter the high limit value at Item HIL (RI.36) in the defined PID module.
The Low Limit or LOL is a number in percent of the output, which defines
a low limit value for the control module output. The default value is 0, and
must always be lower than the high limit. The lower limit is overridden
when the control module is in Off mode and the output falls to 0.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Out Low Lmt (LOL) field,
enter the lower limit in terms of percentage.
70
Configuration Guides—DX-9100 Configuration Guide
Page 71
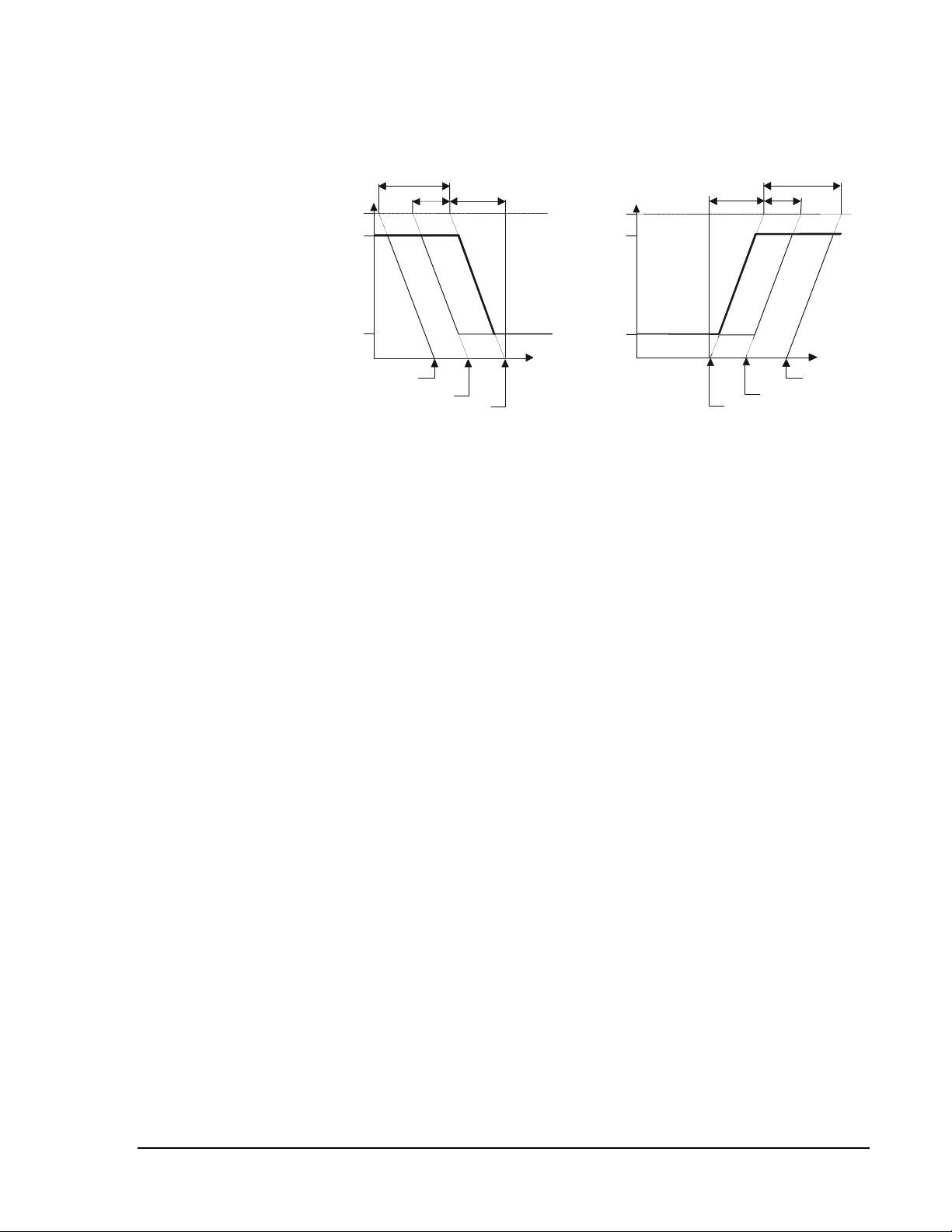
Via the SX Tool
Enter the low limit value at Item LOL (RI.37) in the defined PID module.
Output
100%
HIGH LIMIT
(HIL)
BOF
BSB
PB
Output
100%
HIGH LIMIT
(HIL)
PB
BOF
BSB
Deviation Alarm
Values
LOW LIMIT
(LOL)
0 %
Off
Standby
Comfort
Process
Var iab le
LOW LIMIT
(LOL)
0%
Standby
Comfort
Process
Var iab le
Off
dxcon008
Figure 8: Reverse Acting Controller (Negative PB)/
Direct Acting Controller (Positive PB)
The deviation alarm values define the values which, when exceeded by the
difference between the process variable and the working setpoint, will
automatically generate a deviation alarm.
A low low deviation alarm indicates that the process variable is lower than
the working setpoint by more than the low low deviation alarm value.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the
Data Window, select Data-2 to go to page 2. At the Dev L. L. Limit
(DLL) field, enter a value in units of PV.
Via the SX Tool
The low low deviation alarm value can be entered at Alg. Item DLL
(RI.41).
A low deviation alarm indicates that the process variable is lower than the
working setpoint by more than the low deviation alarm value.
Configuration Guides—DX-9100 Configuration Guide
71
Page 72

Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev Low Limit (DL) field,
enter a value in units of PV.
Via the SX Tool
The low deviation alarm value can be entered at Alg. Item DL (RI.40).
A high deviation alarm indicates that the process variable exceeds the
working setpoint by more than the high deviation alarm value.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev High Limit (DH)
field, enter a value in units of PV.
Via the SX Tool
The high deviation alarm value can be entered at Alg. Item DH (RI.39).
A high high deviation alarm indicates that the process variable exceeds the
working setpoint by more than the high high deviation alarm value.
Enable PID to P
Via the GX Tool
Select the PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev H. H. Limit (DHH)
field, enter a value in units of PV.
Via the SX Tool
The high high deviation alarm value can be entered at Alg. Item DHH (RI.38).
Note: Except for the PID to P changeover described next, deviation
alarms do not affect the control program operation unless the
associated logic variables are used in other programmable
modules. Deviation alarms do not light the LED on the DX front
panel.
If a PID control module is in a high high or low low deviation alarm
condition, it will operate as a proportional-only control module when
Enable PID to P is set. The Enable PID to P change on deviation alarm
feature sets the integral term to zero when the process variable is far from
setpoint, and the controller will convert from a PI or PID controller to a
proportional only controller. This is done to prevent wind-up of the
integration term when the process variable is outside of the normal control
range.
72
Configuration Guides—DX-9100 Configuration Guide
Page 73

PV
HHDA
P Only
WSP
PI or PID
LLDA
PI or PID
Term Frozen
P Only
EDB
Time
EDB
dxcon010
Figure 9: Enable PID to P
Via the GX Tool
Select the defined PID. Then select Data in the module menu. At the
Ena PID to P: 0=N field, entering a 1 will enable this feature.
Via the SX Tool
This parameter is defined through Program Modules at PM Item
PMnOPT (RI.01) in the PID module, with the following bit structure:
X7 = 1 PIDP Enable PID to P change automatically on the
Deviation Alarm (LLDA or HHDA).
Error Deadband
The error deadband is defined in % of the proportional band PB. When
the process error (PV-WSP) is within this deadband, the integral term is
frozen. The deadband is applied above and below setpoint and in the units
of the PV is equal to:
(EDB/100) * (PB/100) * Range of the PV (AIn)
or
(EDB/100) * (PB/100) * 100 (all other numeric values)
Via the GX Tool
Select the defined PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Err Dadband (EDB) field,
enter the value for the desired error deadband.
Via the SX Tool
The error deadband is entered in Item EDB (RI.33) in the PID Module.
Configuration Guides—DX-9100 Configuration Guide
73
Page 74

Symmetrical
Transfer
Function
The control algorithm may be configured to operate as a P controller with
a symmetrical transfer function, where the comfort cooling setpoint is
calculated by adding a constant symmetry band to the comfort heating
setpoint and the control module action is reversed. When the control
module is in Standby or Off mode, there is a shift of the setpoints as
shown in the figure below. For correct symmetrical operation, the
controller must normally be set up as a reverse acting (heating)
proportional controller, with no integral or derivative action, and the
reverse action connection RA@ is not used.
Use this option when you need a single setpoint for two control loops.
Use a dual module for two setpoints.
Via the GX Tool
Select the defined PID. Then select Data in the module menu. At the Ena
Symm mode: 0=N field, enter 1 to enable this feature.
Then select Data-2 to go to page 2, and at the Symmetry Band (SBC)
field, enter a value to add to the setpoint to determine the cooling setpoint.
Via the SX Tool
This symmetric operation is enabled under Program Modules at PM Item
PMnOPT, bit X5 (RI.01) in the PID module. The symmetry band constant
is entered at Item SBC (RI.32).
BOF
BSB
Process
Variable
Off
Standby
dxcon011
Output
100 %
HIGH LIMIT
(HIL)
LOW LIMIT
(LOL)
0 %
BOF
Off
Standby
BSB
PB
Comfort
PB
SBC
Comfort
Figure 10: Controller with Symmetric Operation
(Proportional Controller Only)
74
Configuration Guides—DX-9100 Configuration Guide
Page 75

Notes
1. The output, biases, PB, rate, and reset parameters can be read and
modified from the DX front panel. See Display Panel and Keypads in
the DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
2. With the SX Tool, the various outputs of the control algorithm can be
seen at Items OCM (RI.60), WSP (RI.61), PV (RI.62), RSP (RI.66),
and RV (RI.67).
3. The logic status of the control algorithm can be seen at PM Item
PMnST (RI.72) with the SX Tool, with the following bit structure:
X1 = 1 CML Controller Output at Low Limit
X2 = 1 CMH Controller Output at High Limit
X3 = 1 FORC Force-back to OCM from AO is active.
FORC is set when the connected AO (analog
output) is in Hold mode. The value of the AO
is also forced back, or set into the OCM, to
provide bumpless override control for a PID
module with an integral action.
X5 = 1 LLDA Low Low Deviation Alarm
X6 = 1 LDA Low Deviation Alarm
X7 = 1 HDA High Deviation Alarm
X8 = 1 HHDA High High Deviation Alarm
X9 = 1 SOF Shutoff mode Active
X10= 1 STA Startup mode Active
X11= 1 EF External Forcing Active
X12= 1 OF Off Mode Active
X13= 1 SB Standby Mode Active
X14= 1 RA Reverse Action Mode
X15 = 0 HEAT (Cooling Controller or PV above center of
SBC in Symmetric Operation)
X15 = 1 HEAT (Heating Controller or PV below center of
SBC in Symmetric Operation)
Status Items can be used as logic (digital) connections using the GX Tool
or SX Tool.
Configuration Guides—DX-9100 Configuration Guide
75
Page 76

GX Labels
Source Points (Outputs)
PMnCMH A 1 when a control module’s output is equal to its output
high limit.
PMnCML A 1 when a control module’s output is equal to its output
low limit.
PMnCMP A 1 when the control module’s WSP is being overridden by
a BAS (Computer mode).
PMnEF A 1 when this control module is being externally forced.
PMnHDA A 1 when the difference PV - WSP is larger than the high
deviation alarm value.
PMnHEAT A 1 when, in a symmetric control module, the PV is below
the center of the symmetry band, and a 0 when above
center; or a 1 when, in a dual control module, Loop 1 is
active.
PMnHHDA A 1 when the difference PV - WSP is larger than the high
high deviation alarm value.
PMnHLD A 1 when the program module is in the Hold mode, being
overridden by the SX Tool or a BAS.
PMnLDA A 1 when the difference WSP - PV is larger than the low
deviation alarm value.
PMnLLDA A 1 when the difference WSP - PV is larger than the low
low deviation alarm value.
PMnLSP The value of the local setpoint. (This value is changed
when adjusting the WSP from the DX front panel.)
PMnOCM The value of the PID control module output in percent;
either a 1 or 0 for an On/Off control module.
PMnSOF A 1 when this control module is in the Shutoff mode, which
occurs when enable shutoff = 1 and the BAS has
commanded it On.
PMnSTA A 1 when this control module is in the Startup mode, which
occurs when enable startup = 1 and the BAS has
commanded it On.
PMnWSP The value of a control module working setpoint.
76
Configuration Guides—DX-9100 Configuration Guide
Page 77

Destination Points (Inputs)
EF@ The connection to the external forcing point of control
modules.
MNWS@ The connection to the minimum working setpoint of a
control module. The WSP cannot be adjusted below this
value.
MXWS@ The connection to the maximum working setpoint of a
control module. The WSP cannot be adjusted above this
value.
OB@ The connection of an output bias value of a PID module.
OF@ The connection to the off-mode source point of a control
module.
PB@ The connection to proportional band, which replaces the
value PB if there is a connection.
PV@ The connection to the process variable of a PID or an
On/Off.
RA@ The connection to the reverse action point of a control
module.
RS@ The connection to a remote setpoint, which is used in the
calculation for the working setpoint.
RV@ The connection to reference variable which is a multiplier
in the calculation for the working setpoint.
SB@ The connection to the standby source point of a control
module.
Configuration Guides—DX-9100 Configuration Guide
77
Page 78

Algorithm 02 On/Off Control
Module
Setting
Supervisory
Control Options
These options are a series of parameters that define how the On/Off
Control Module operates and reacts to BAS commands.
Via the GX Tool
Select the defined On/Off module. Then select Data in the module menu.
At the Ena Shutoff: 0=N field, enter a 1 to enable this function.
At the Shutoff Out Level field, enter 0 for Off and 1 for On. It will go to
the specified state if Shutoff is enabled and the BAS has set Shutoff in the
controller.
At the Ena Startup: 0=N field, enter a 1 to enable the function.
At the Startup Out Level field, enter 0 for Off and 1 for On. It will go to
the specified state if Startup is enabled, and the BAS has set Startup in
the controller.
Via the SX Tool
These parameters are defined under Program Modules at PM Item
PMnOPT (RI.01) of the On/Off module, with the following bit structure:
X1 = 1 SOFE Enable Shutoff mode from BAS
Process Variable
Connection PV
X2 SOFL 0=0, 1=1 Shutoff out level
X3 = 1 STAE Enable Startup mode from BAS
X4 STAL 0=0, 1=1 Startup out level
The Process Variable (PV) is an analog value connection to the control
module. When the process variable is not equal to the setpoint, the
controller responds by changing its output value in accordance with the
On/Off parameters.
Via the GX Tool
Make a connection between the source point and PV@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected process variable at Alg. Item PV@ (RI.10) in the defined On/Off
module.
78
Configuration Guides—DX-9100 Configuration Guide
Page 79

Remote Setpoint
Connection RS@
The Remote Setpoint (RSP) is an analog variable in the control module, in
units of PV, which produces a bias in the local setpoint. If the input is not
connected, the controller will use the default value 0.
WSP = RV (RSP + LSP) + bias
Via the GX Tool
Make a connection between the source point and RS@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected remote setpoint at Alg. Item RS@ (RI.11) in the defined On/Off
module.
Reference
Variable
Connection RV@
Reverse Action
Connection RA@
The Reference Variable (RV) is an analog variable to the control module,
which causes the control module to perform as a ratio controller. Its effect
is a multiplier in the working setpoint calculation. If the input is not
connected, the controller will use the default value 1.
WSP = RV (RSP + LSP) + bias
Via the GX Tool
Make a connection between the source point and RV@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected reference variable at Alg. Item RV@ (RI.12) in the defined
On/Off module.
The Reverse Action connection or RA@ is a logic input to the control
module which changes its action from direct to reverse or vice versa. If the
input is not connected, the controller will use the default value 0 and the
function is disabled such that the defined action in ACT is always used.
Note: When reverse action is a logic 1, the DX front panel PB will not
show that it has been reversed.
Configuration Guides—DX-9100 Configuration Guide
79
Page 80

Via the GX Tool
Make a connection between the source point and RA@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected reverse action logic variable at Alg. Item RA@ (RI.16).
Local Setpoint
Action Mode
The Local Setpoint or LSP is a value that represents the basic setpoint of
the control module. It is a number that should be within the range of the
process variable. The LSP is disabled when Remote mode is enabled.
When a WSP adjustment is made from the front panel, it is the LSP that is
actually changed according to the formula below:
WSP = RV (RSP + LSP) + bias
Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Local Set Pt (LSP) field,
enter the setpoint of the module.
Via the SX Tool
Under Program Modules, select the On/Off module and enter a value for
the local setpoint at Alg. Item LSP (RI.26).
The Action mode or ACT is a value that defines the action of the control
module. A -1 will define a reverse acting control module; a decrease of the
process variable below WSP will cause the output to switch to On (1).
A +1 will define a direct acting control module; an increase of the process
variable above WSP will cause the output to switch to On (1).
Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Action (ACT) field,
enter 1 or -1.
Via the SX Tool
Under Program Modules, select the On/Off module and enter 1 or -1 as
the Action mode at Alg. Item ACT (RI.27).
80
Configuration Guides—DX-9100 Configuration Guide
Page 81
Differential
The differential or DIF is a number that defines the change in process
variable required to initiate Off transitions once the output is On. It is used
to eliminate short-cycling.
Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Differential (DIF) field,
enter the amount of change to cause an Off transition in the units of the
PV.
Via the SX Tool
Configure the software by entering a value for the selected differential
logic variable at Alg. Item DIF (RI.28) in the On/Off module.
PV
OCM = 0
WSP
Deviation Alarm
Values
OCM = 1
DIF
OCM = 0
dxcon012
WSP
DIF
OCM = 1
PV
Figure 11: Reverse Acting Controller/Direct Acting Controller
The deviation alarm values define the value which, when exceeded by the
difference between the process variable and the working setpoint, will
automatically generate a deviation alarm.
A low low deviation alarm indicates that the process variable is lower than
the working setpoint by more than the low low deviation alarm value.
Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev L. L. Limit (DLL)
field, enter a value in units of PV.
Via the SX Tool
Enter the low low deviation alarm value at Alg. Item DLL (RI.41).
A low low deviation alarm indicates that the process variable is lower than
the working setpoint by more than the low deviation alarm value.
Configuration Guides—DX-9100 Configuration Guide
81
Page 82

Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev Low Limit (DL) field,
enter a value in units of PV.
Via the SX Tool
Enter the low deviation alarm value at Alg. Item DL (RI.40).
A high deviation alarm indicates that the process variable exceeds the
working setpoint by more than the high deviation alarm value.
Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev High Limit (DH)
field, enter a value in units of PV.
Via the SX Tool
Enter the high deviation alarm value at Alg. Item DH (RI.39).
Symmetrical
Transfer
Function
A high high deviation alarm indicates that the process variable exceeds the
working setpoint by more than the high deviation alarm value.
Via the GX Tool
Select On/Off. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev H. H. Limit (DHH)
field, enter a value in units of PV.
Via the SX Tool
Enter the high high deviation alarm value at Alg. Item DHH (RI.38).
Note: Deviation alarms do not affect the control program operation
unless the associated logic variables are used in other
programmable modules. Deviation alarms do not light the LED on
the DX front panel.
The control algorithm may be configured to operate as an On/Off
controller with a symmetrical transfer function, where the comfort cooling
setpoint is calculated by adding a constant symmetry band to the comfort
heating setpoint and the control module action is reversed.
When the control module is in Standby or Off mode, there is a shift of the
setpoints, as shown in the Figure 12. When the controller is configured as
direct action (ACT = +1) the output is at 1 within the symmetry band
(SBC).
82
Configuration Guides—DX-9100 Configuration Guide
Page 83
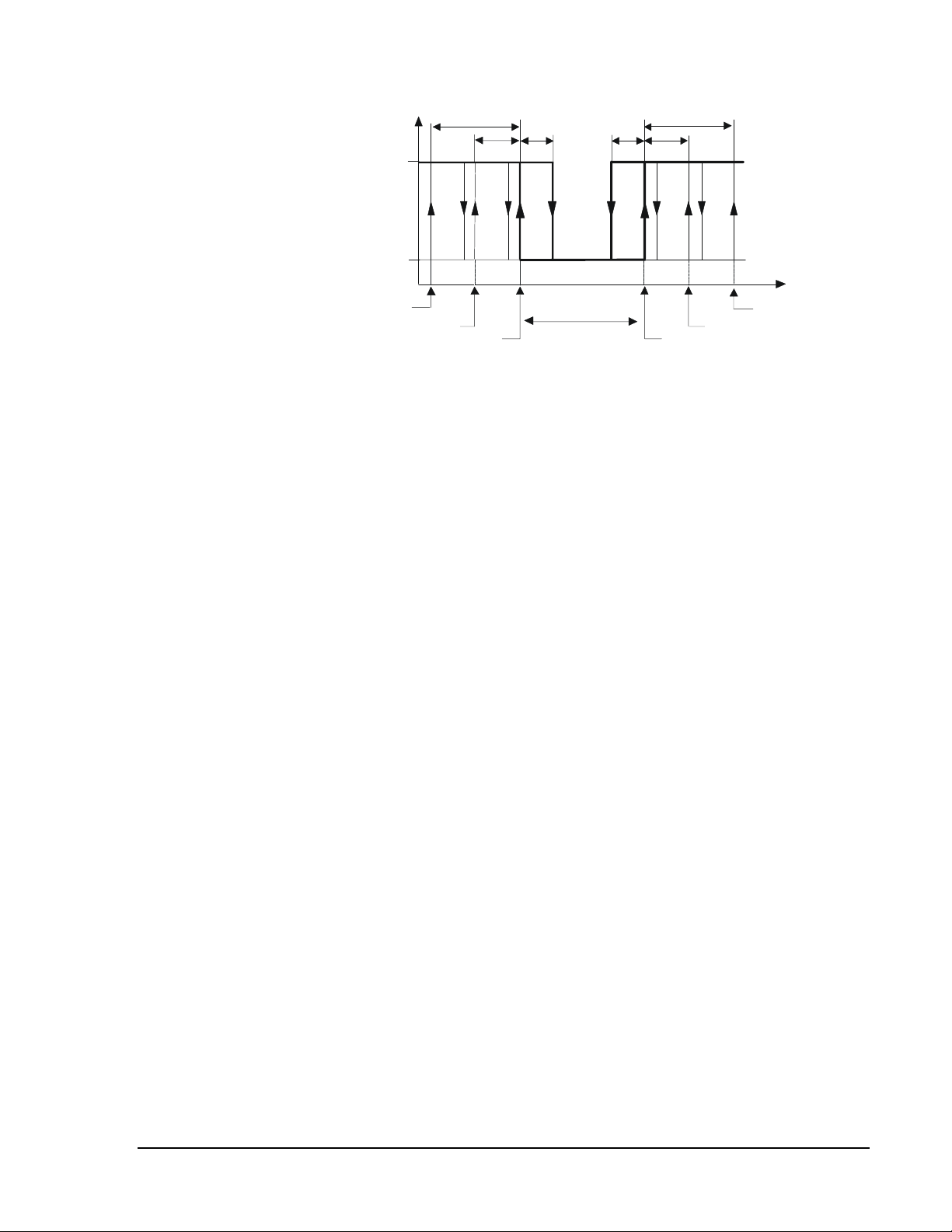
Output
100 %
0 %
BOF
BSB
DIF
DIF
BOF
BSB
Process
Var iab le
Notes
Off
Standby
Comfort
SBC
Comfort
Off
Standby
dxcon014
Figure 12: On/Off Controller with Symmetric Operation
(ACT = -1)
Via the GX Tool
Select On/Off. Then select Data in the module menu. At the
Ena Symm mode 0=N field, enter 1 to enable or 0 to disable this function.
If enabled, select Data-2 to go to page 2. At the Symmetry Band (SBC)
field, enter a value to add to the setpoint to determine the cooling setpoint.
Via the SX Tool
This symmetric operation is enabled at bit X5, PM Type PMnOPT
(RI.01) in the On/Off module. The symmetry band is entered at Alg. Item
SBC (RI.32).
1. The WSP, output, biases, and action mode values can be read and
modified from the DX front panel. See Display Panel and Keypads in
the DX-9100 Extended Digital Controller Technical Bulletin
(LIT-6364020) in FAN 636.4 or 1628.4.
2. With the SX Tool, the active values of the control algorithm can be
seen at Alg. Items WSP (RI.61), PV (RI.62), RSP (RI.66), and
RV (RI.67).
3. The output of the control algorithm can be seen at PM Item PMnDO
(RI.71) bit X1 (Alg. Item OCM).
Configuration Guides—DX-9100 Configuration Guide
83
Page 84

4. The logic status of the control algorithm can be seen at PM Item
PMnST (RI.72), with the following bit structure:
X1 = 1 CML Controller Output at 0
X2 = 1 CMH Controller Output at 1
X5 = 1 LLDA Low Low Deviation Alarm
X6 = 1 LDA Low Deviation Alarm
X7 = 1 HDA High Deviation Alarm
X8 = 1 HHDA High High Deviation Alarm
X9 = 1 SOF Shutoff Mode Active
X10= 1 STA Startup Mode Active
X11= 1 EF External Forcing Active
X12= 1 OF Off Mode Active
X13= 1 SB Standby Mode Active
X14= 1 RA Reverse Action Mode
X15 = 0 HEAT (Cooling Controller or PV above center of
SBC in Symmetric Operation)
GX Labels
X15 = 1 HEAT (Heating Controller or PV below center of
SBC in Symmetric Operation)
Status Items can be used as logic (digital) connections using the GX Tool
or SX Tool.
Source Points (Outputs)
PMnCMH A 1 when a control module’s output is equal to its output
high limit.
PMnCML A 1 when a control module’s output is equal to its output
low limit.
PMnCMP A 1 when the control module’s WSP is being overridden by
a BAS (Computer mode).
PMnEF A 1 when this control module is being externally forced.
PMnHDA A 1 when the difference PV - WSP is larger than the high
deviation alarm value.
PMnHEAT A 1 when, in a symmetric control module, the PV is below
the center of the symmetry band, and a 0 when above
center; or a 1 when, in a dual control module, Loop 1 is
active.
PMnHHDA A 1 when the difference PV - WSP is larger than the high
high deviation alarm value.
84
Configuration Guides—DX-9100 Configuration Guide
Page 85

PMnHLD A 1 when the program module is in the Hold mode, being
overridden by the SX Tool or a BAS.
PMnLDA A 1 when the difference WSP - PV is larger than the low
deviation alarm value.
PMnLLDA A 1 when the difference WSP - PV is larger than the low
low deviation alarm value.
PMnLSP The value of the local setpoint. (This value is changed
when adjusting the WSP from the DX front panel.)
PMnOCM The value of the PID control module output in percent,
either a 1 or 0 for an On/Off control module.
PMnSOF A 1 when this control module is in the Shutoff mode, which
occurs when enable shutoff = 1 and the BAS has
commanded it On.
PMnSTA A 1 when this control module is in the Startup mode, which
occurs when enable startup = 1 and the BAS has
commanded it On.
PMnWSP The value of a control module working setpoint.
Destination Points (Inputs)
EF@ The connection to the external forcing point of control
modules.
MNWS@ The connection to the minimum working setpoint of a
control module. The WSP cannot be adjusted below this
value.
MXWS@ The connection to the maximum working setpoint of a
control module. The WSP cannot be adjusted above this
value.
OF@ The connection to the off-mode source point of a control
module.
PV@ The connection to the process variable of a PID or an
On/Off.
RA@ The connection to the reverse action point of a control
module.
RS@ The connection to a remote setpoint, which is used in the
calculation for the working setpoint.
RV@ The connection to reference variable, which is a multiplier
in the calculation for the working setpoint.
SB@ The connection to the standby source point of a control
module.
Configuration Guides—DX-9100 Configuration Guide
85
Page 86

Algorithm 03 Heating/Cooling
PID Control
Module
(Dual PID)
The heating/cooling PID Control Module algorithm has two PID control
loops, which share the same process variable and control output, and have
one set of status variables, but have two different sets of tuning
parameters. In Version 1.1 or later, two independent control outputs are
also provided, one for each loop. Only one of the two loops will be active,
depending on the control status:
PV < WSP1 Loop 1 is active.
PV > WSP2 Loop 2 is active.
Abs(PV - WSP1) <= Abs(PV - WSP2) Loop 1 is active.
Note: WSP2 must always be greater than WSP1. Abs stands for absolute.
Setting
Supervisory
Options
The options are a series of parameters that define how the PID Control
Module operates and reacts to BAS commands.
Via the GX Tool
Click on PM in the toolbar, select Control, then Dual PID, and position
the module (box) on the screen. Select the module and then Data to call up
the Data Window. At the Ena Shutoff: 0=N field, enter a 1 to enable this
function.
At the Shutoff Out Level field, enter a value for the output to go to if
Shutoff is enabled and the BAS has set Shutoff in the controller.
At the Ena Startup: 0=N field, enter a 1 to enable the function.
At the Startup Out Level field, enter a value for the output to go to if
Startup is enabled and the BAS has set Startup in the controller.
At the Ena Off Trans: 0=N field, enter a 1 so the module will operate in
Off mode if the BAS has set Shutoff and the process variable is below the
Off mode WSP. This is only used in a reverse acting loop (negative
proportional band) for heating applications for low temperature protection.
Via the SX Tool
These parameters are defined under Program Module at PM Item
PMnOPT (RI.01) in the DUAL PID module, with the following bit
structure:
X1 = 1 SOFE Enable Shutoff Mode from BAS
X3 = 1 STAE Enable Startup Mode from BAS
X9 = 1 SOTO Enable Shutoff to Off change
86
Configuration Guides—DX-9100 Configuration Guide
Page 87

Process Variable
PV@
The Process Variable (PV) is an analog value connection to the control
module. When the process variable is not equal to the setpoint, the
controller responds by changing its output value in accordance with the
PID parameters.
Via the GX Tool
Make a connection between the source point and PV@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected process variable under Program Modules at Alg. Item PV@
(RI.10) in the defined DUAL PID module.
Remote Setpoint
RS1@, RS2@
Reference
Variables RV1@,
RV2@
Each of the two remote setpoints (RSP1, RSP2) is an analog variable in
the control module, in units of PV, which produces a bias in the respective
local setpoint. If the input is not connected, the controller will use the
default value 0.
WSPn = RVn (RSPn + LSPn) + (bias)n n = 1, 2
Via the GX Tool
Make a connection between the source point and RS1@ in the destination
control module. Make a connection between the source point and RS2@ in
the destination control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected remote setpoints under Program Modules at Alg. Items RS1@
(RI.11) and RS2@ (RI.18) in the defined DUAL PID module.
Each of the two reference variables (RV1, RV2) is an analog input to the
control module, which causes the respective loop in the control module to
perform as a ratio controller. Its effect is a multiplier in the working
setpoint calculation. If the input is not connected, the controller will use
the default value 1.
WSPn = RVn (RSPn + LSPn) + (bias)n n = 1, 2
Via the GX Tool
Make a connection between the source point and RV1@ in the destination
control module. Make a connection between the source point and RV2@
in the destination control module.
Configuration Guides—DX-9100 Configuration Guide
87
Page 88

Via the SX Tool
Configure the software connection by entering the source address of the
selected reference variables under Program Modules at Alg. Item RV1@
(RI.12) and RV2@ (RI.19) in the defined DUAL PID module.
Proportional
Band
The proportional band is a number that defines the action and sensitivity of
the control module. A negative number defines a reverse acting control
module; an increase of the process variable produces a decrease in the
output signal. A positive number defines a direct acting control module; an
increase of the process variable produces an increase in the output signal.
The number itself is an analog input connection (PB@) or value
(PB1 or PB2) that is expressed in percent of the process variable range.
When the process variable is one of the eight analog inputs to the
DX-9100 Controller, the PV range is the range of the analog input.
Otherwise, the range defaults to 0-100 (including all XP analog inputs).
The connection is used for an application requiring a dynamic proportional
band and if this input is not connected, the controller will use the
proportional band value of PB1 or PB2.
The number itself defines the percentage of the process variable range
change that will produce a full output signal change. For example, if the
process variable has a control range of 0 to 100, a proportional band of 2%
indicates that a change of 2 in the process variable will cause the control
module output signal to change by 100%. If the process variable range is
0-40, a proportional band of 10% indicates that a change of 4 in the
process variable will cause the control module output signal to change by
100%.
Via the GX Tool
Make a connection between the source point and PB1@ in the destination
control module. Make a connection between the source point and PB2@ in
the destination control module.
Alternately, select the defined Dual PID. Then select Data in the module
menu. In the Data Window, select Data-2 to go to page 2. At the
Proport. Band (PB1) and Proport. Band (PB2) fields, enter the required
values.
Via the SX Tool
Under Program Modules, select the DUAL PID module. The software
connection is configured by entering the source addresses of the selected
proportional band at Alg. Items PB1 (RI.27) and PB2 (RI.44); or, enter a
value for the proportional bands at the PB Items (RI.27, RI.44) location.
88
Configuration Guides—DX-9100 Configuration Guide
Page 89

Reverse Action
Connection RA@
The reverse action connection is a logic input to the control module, which
changes the action of both controllers from direct to reverse or vice versa.
Extreme caution is advised when using this connection when setpoint
biases are also being used as the sign of the biases is not reversed. For
correct controller operation, WSP2 must always be greater than WSP1.
If the input is not connected, the controller will use the default value 0 and
the function is disabled such that the defined action in PB@, PB1 or PB2
is always used.
Via the GX Tool
Make a connection between the source point and the RA@ point of the
destination control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected reverse action logic variable under Program Modules at
Alg. Item RA@ (RI.16) in the defined DUAL PID module.
Output Bias
Each of the two output bias connections (OB1@, OB2@) is an analog
input to the respective loop of the control module which biases the value
of the output. If the input is not connected, the controller will use the
output bias value OB1 or OB2. This option is normally used in a
proportional only control module where the value of OBn determines the
output of the respective control module when the PV is equal to the WSP.
Via the GX Tool
Make a connection between the source point and the OB1@ point of the
destination control module. Make a connection between the source point
and the OB2@ destination point.
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. Enter a value at:
• Output Bias #1 (OB1)
• Output Bias #2 (OB2)
Via the SX Tool
Configure the software connection by entering the source address of the
selected output bias at Items OB1@ (RI.20) and OB2@ (RI.21).
Alternatively, the internal output bias values are set under Program
Modules at Alg. Items OB1 (RI.34) or OB2 (RI.50).
Configuration Guides—DX-9100 Configuration Guide
89
Page 90

Local Setpoint
Each of the two local setpoints is a value that represents the basic setpoint
of the respective loop in the control module. It is a number that should be
within the range of the process variable. LSP1 and LSP2 are disabled
when Remote mode is enabled. When a WSP1 or WSP2 is adjusted from
the front panel, the respective LSP is changed according to the formula
below:
WSPn = RVn (RSPn + LSPn) + (bias)n n=1,2
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Local SP #1 (LSP1) and
Local SP #2 (LSP2) fields, enter a value in units of PV.
Via the SX Tool
Under Program Modules, select the DUAL PID module and enter values
for the local setpoints at Alg. Items LSP1 (RI.26) and LSP2 (RI.43).
Reset Actions
Each of the two reset actions is a number which defines the integration
time for proportional-integral type control modules and is expressed in
repeats per period of 1 minute, between 0 and 60. The integral time (Tn)
may be computed from this number using the formula: Tn = 1/TI.
Note: The integral term of each control loop is frozen when the loop
becomes inactive and therefore determines the initial output of the
loop when it again becomes active.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Reset Action #1 (TI1) and
Reset Action #2 (TI2) fields, enter a value.
Via the SX Tool
Enter a value for the selected reset actions under Program Modules at
Alg. Items TI1 (RI.28) or TI2 (RI.45).
90
Configuration Guides—DX-9100 Configuration Guide
Page 91

Rate Actions
Each of the two rate actions defines the derivative action decay time value
and is entered in minutes, between 0 and 5.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Rate Action #1 (TD1) and
Rate Action #2 (TD2) fields, enter a value.
Via the SX Tool
Enter a value for the selected rate actions under Program Modules at
Alg. Items TD1 (RI.29) or TD2 (RI.46).
Output High
Limits
Output Low
Limits
Each of the two high limits is a percent of the output, which defines a high
limit value for the control module output in the respective loop. The
default value is 100 for each limit, and must always be higher than the low
limit.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Out H Lmt #1 (HIL1) and
Out H Lmt #2 (HIL2) fields, enter a value.
Via the SX Tool
Enter a value for the selected high limit under Program Modules at
Alg. Items HIL1 (RI.36) and HIL2 (RI.53).
Each of the two low limits is a percent of the output, which defines a low
limit value for the control module output in the respective loop. The
default value is 0 for each limit, and must always be lower than the high
limit. The low limits are overridden when the control module is in
Off mode and the output falls to 0.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Out L Lmt #1 (LOL1) and
Out L Lmt #2 (LOL2) fields, enter a value.
Via the SX Tool
Enter a value for the selected low limit under Program Modules at
Alg. Items LOL1 (RI.37) and LOL2 (RI.54).
Configuration Guides—DX-9100 Configuration Guide
91
Page 92

Output
100 %
HIL2
HIL1
BOF1
BSB1
PB1
PB2
BOF2
BSB2
Deviation Alarm
Values
LOL1
LOL2
0 %
Off
Standby
Comfort
Comfort
Process
Var iab le
Off
Standby
dxcon015
Figure 13: Heating/Cooling Module Operation
The deviation alarm values define the value which, when exceeded by the
difference between the process variable and the actual working setpoint,
will automatically generate a deviation alarm.
A low low deviation alarm indicates that the process variable is lower than
the working setpoint of the respective loop by more than the low low
deviation alarm value.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev LL Lmt #1 (DLL1)
and Dev LL Lmt #2 (DLL2) fields, enter a value in units of PV.
Via the SX Tool
The low low deviation alarm value for the respective loop can be entered
under Program Modules at Alg. Item DLL1 (RI.41) and DLL2 (RI.58).
A low deviation alarm indicates that the process variable is lower than the
working setpoint of the respective loop by more than the low deviation
alarm value.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev L Lmt #1 (DL1) and
Dev L Lmt #2 (DL2) fields, enter a value in units of PV.
92
Configuration Guides—DX-9100 Configuration Guide
Page 93

Via the SX Tool
The low deviation alarm value for the respective loop can be entered under
Program Modules at Alg. Item DL1 (RI.40) and DL2 (RI.57).
A high deviation alarm indicates that the process variable exceeds the
working setpoint of the respective loop by more than the high deviation
alarm value.
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev H Lmt #1 (DH1) and
Dev H Lmt #2 (DH2) fields, enter a value in units of PV.
Via the SX Tool
The high deviation alarm value for the respective loop can be entered
under Program Modules at Alg. Item DH1 (RI.39) and DH2 (RI.56).
A high high deviation alarm indicates that the process variable exceeds the
working setpoint of the respective loop by more than the high high
deviation alarm value.
Enable PID to P
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Dev HH Lmt #1 (DHH1)
and Dev HH Lmt #2 (DHH2) fields, enter a value in units of PV.
Via the SX Tool
The high high deviation alarm value for the respective loop can be entered
under Program Modules at Alg. Item DHH1 (RI.38) and DHH2 (RI.55).
Note: Except for the PID to P changeover described below, deviation
alarms do not affect the control program operation unless the
associated logic variables are used in other programmable
modules. Deviation alarms do not light the LED on the DX front
panel.
If a PID control loop has a high high or low low deviation alarm, it will
operate as a proportional only loop when the PID to P feature is enabled.
(Refer to Figure 9.)
Configuration Guides—DX-9100 Configuration Guide
93
Page 94

Via the GX Tool
Select DUAL PID. Then select Data in the module menu. At the
Ena PID to P: 0=N field, enter 1 to enable PID to P transition, or 0 to
disable this feature.
Via the SX Tool
This feature is enabled when Alg. Item PIDP (RI.01) bit X7 is set to 1
under Program Modules.
Error Deadband
Enable Zero
Output
Changeover
The error deadband is expressed in percent of the active proportional band
PB1 or PB2. When the process error (PV-WSP) is within this deadband,
the integral term is frozen. The deadband is applied above and below
setpoint and in the units of the PV is equal to:
(EDB/100) * (PB/100) * Range of the PV (AIn)
or
(EDB/100) * (PB/100) * 100 (all other numeric values)
Via the GX Tool
Select Dual PID. Then select Data in the module menu. In the Data
Window, select Data-2 to go to page 2. At the Err Dd Bnd #1 (EDB1)
and Err Dd Bnd #2 (EDB2) fields, enter a value in percent of PB.
Via the SX Tool
The error deadbands are entered under Program Modules at Alg. Items
EDB1 (RI.33) and EDB2 (RI.49).
When this option is enabled, the changeover from one loop to another will
only take place when the output of the active loop is at its low limit. This
feature is used when the control loops have integral or derivative action
and the process variable can change very quickly. It prevents a loop
becoming inactive when its output is above the low limit value due to the
integral or derivative term.
When this option is not enabled, the output of the loop will go to its low
limit when the loop becomes inactive, and when the loop becomes active
again, the output will immediately return to the value at the time of the
previous changeover. This may cause unnecessary instability.
When a long integral time is configured, the effect of enabling this option
will be to slow down the changeover from heating to cooling or vice-versa
when the process variable changes rapidly. The changeover cannot occur
until the integral and derivative terms have decayed such that the output is
at the low limit value. This feature is available with x.3 controllers or later.
94
Configuration Guides—DX-9100 Configuration Guide
Page 95

Via the GX Tool
Select the module and then Data to call up the Data Window.
At the Ena zero c/o: 0=N field, enter a 1 to enable this function.
Via the SX Tool
This parameter is defined under Program Module at PM Item PMnOPT
(RI.01) in a DUAL PID module as follows:
X10 = 1 EZCO Enable Zero Output Changeover
Notes
1. The WSP1, WSP2, PB1, PB2, OCM, PV, TI1, TI2, TD1, TD2, BOF1,
BOF2, BSB1, and BSB2 can be read and modified from the DX front
panel. See Display Panel and Keypads in the DX-9100 Extended
Digital Controller Technical Bulletin (LIT-6364020) in FAN 636.4
or 1628.4.
2. With the SX Tool, the various outputs of the control algorithm can be
seen at Alg. Items OCM (RI.60), WSP1 (RI.61), WSP2 (RI.62),
PV (RI.63), RSP (RI.66), RV (RI.67), OCM1 (RI.68), and OCM2
(RI.69).
3. OCM represents the output of the active loop. OCM1 and OCM2,
which are only available for Version 1.1 and later, represent the
outputs of Loops 1 and 2, respectively.
Configuration Guides—DX-9100 Configuration Guide
95
Page 96

4. The logic status of the control algorithm can be seen at PM Item
PMnST (RI.72), with following bit structure:
X1 = 1 CML Controller Output at Low Limit
X2 = 1 CMH Controller Output at High Limit
X3 = 1 FORC Force-back to OCM from AO is active.
FORC is set when the connected AO (analog
output) is in Hold mode. The value of the AO
is also forced back, or set into the OCM, to
provide bumpless override control for a PID
module with an integral action.
Force-back is not active when the AO is
connected to OCM1 or OCM2.
X5 = 1 LLDA Low Low Deviation Alarm
X6 = 1 LDA Low Deviation Alarm
X7 = 1 HDA High Deviation Alarm
X8 = 1 HHDA High High Deviation Alarm
X9 = 1 SOF Shutoff Mode Active
GX Labels
X10= 1 STA Startup Mode Active
X11= 1 EF External Forcing Active
X12= 1 OF Off Mode Active
X13= 1 SB Standby Mode Active
X14= 1 RA Reverse Action Mode
X15= 0 HEAT Cooling (Loop 2 active) (PV above WSP2)
X15= 1 HEAT Heating (Loop 1 active) (PV below WSP1)
Status Items can be used as logic (digital) connections using the GX Tool
or SX Tool.
Source Points (Outputs)
PMnCMH A 1 when a control module’s output is equal to its output
high limit.
PMnCML A 1 when a control module’s output is equal to its output
low limit.
PMnCMP A 1 when the control module’s WSP is being overridden by
a BAS (Computer mode).
PMnEF A 1 when this control module is being externally forced.
96
Configuration Guides—DX-9100 Configuration Guide
Page 97

PMnHEAT A 1 when, in a symmetric control module, the PV is below
the center of the symmetry band, and a 0 when above
center; or a 1 when, in a dual control module, Loop 1 is
active.
PMnHDA A 1 when the difference PV - WSP is larger than the high
deviation alarm value.
PMnHHDA A 1 when the difference PV - WSP is larger than the high
high deviation alarm value.
PMnHLD A 1 when the program module is in the Hold mode, being
overridden by the SX Tool or a BAS.
PMnLDA A 1 when the difference WSP - PV is larger than the low
deviation alarm value.
PMnLLDA A 1 when the difference WSP - PV is larger than the low
low deviation alarm value.
PMnLSP1 The value of the local setpoint of Loop 1 of a dual control
module. (This value is directly changed when adjusting the
WSP1 from the DX front panel.)
PMnLSP2 The value of the local setpoint of Loop 2 of a dual control
module. (This value is changed when adjusting the WSP2
from the DX front panel.)
PMnMNWS The value of the minimum working setpoint allowed for a
control module.
PMnMXWS The value of the maximum working setpoint allowed for a
control module.
PMnOCM The value of the dual PID control module output in percent.
PMnOCM1 The value of the Loop 1 output in a dual PID control
module in percent.
PMnOCM2 The value of the Loop 2 output in a dual PID control
module in percent.
PMnSOF A 1 when this control module is in the Shutoff mode, which
occurs when enable shutoff = 1 and the BAS has
commanded it On.
PMnSTA A 1 when this control module is in the Startup mode, which
occurs when enable startup = 1 and the BAS has
commanded it On.
PMnWSP1 The value of the working setpoint of Loop 1 of a dual
control module.
PMnWSP2 The value of the working setpoint of Loop 2 of a dual
control module.
Configuration Guides—DX-9100 Configuration Guide
97
Page 98

Destination Points (Inputs)
EF@ The connection to the external forcing point of control
modules.
MNWS@ The connection to the minimum working setpoint of a control
module. The WSP cannot be adjusted below this value.
MXWS@ The connection to the maximum working setpoint of a
control module. The WSP cannot be adjusted above this
value.
OB1@ The connection for Loop 1 of a dual PID output bias.
OB2@ The connection for Loop 2 of a dual PID output bias.
OF@ The connection to the off-mode source point of a control
module.
PB@ The connection to proportional band, which replaces the
value PB if there is a connection.
PV@ The connection to the process variable of a control module.
RA@ The connection to the reverse action point of a control
module.
Algorithm 04 Heating/
Cooling On/Off
Control Module
(Dual On/Off)
RS1@ The connection for Loop 1 of a dual control module remote
setpoint.
RS2@ The connection for Loop 2 of a dual control module remote
setpoint.
RV1@ The connection for Loop 1 of a dual control module
reference variable.
RV2@ The connection for Loop 2 of a dual control module
reference variable.
SB@ The connection to the standby source point of a control
module.
The heating/cooling On/Off algorithm has two On/Off Control loops that
share the same process variable and control output, and have one set of
status variables, but have two different sets of tuning parameters. In
Version 1.1 or later, two independent control outputs are also provided,
one for each loop. Only one of the two loops will be active, depending on
the control status:
PV < = WSP1 Loop 1 is active.
PV > = WSP2 Loop 2 is active.
Abs (PV - WSP1) < = Abs (PV - WSP2) Loop 1 is active.
Note: WSP2 must always be greater than WSP1.
98
Configuration Guides—DX-9100 Configuration Guide
Page 99

Setting
Supervisory
Control Options
The options are series of parameters that define how the On/Off Control
Module operates and reacts to BAS commands.
Via the GX Tool
Click on PM in the toolbar, select Control, then Dual On/Off and
position the module (box) on the screen. Select the module and then Data
to call up the Data Window. At the Ena Shutoff: 0=N field, enter a 1 to
enable this function.
At the Shutoff Out Level field, enter 0 for Off and 1 for On. It will go to
the specified state if Shutoff is enabled and the BAS has set Shutoff in the
controller.
At the Ena Startup: 0=N field, enter a 1 to enable the function.
At the Startup Out Level field, enter 0 for Off and 1 for On. It will go to
the specified state if Startup is enabled and the BAS has set Startup in the
controller.
Via the SX Tool
These parameters are defined under Item PMnOPT (RI.01) of the
D On/Off module, with the following bit structure:
Process Variable
Connection PV@
X1 = 1 SOFE Enable Shutoff mode from Supervisory System
X2 SOFL 0=0, 1=1 Shutoff out level
X3 = 1 STAE Enable Startup mode from Supervisory System
X4 STAL 0=0, 1=1 Startup out level
The Process Variable (PV) is an analog value connection to the control
module. When the process variable is not equal to the setpoint, the
controller responds by changing its output value in accordance with the
On/Off parameters.
Via the GX Tool
Make a connection between the source point and PV@ in the destination
control module.
Via the SX Tool
Configure the software connection by entering the source address of the
selected process variable under Program Modules at Item PV@ (RI.10)
in the defined D On/Off module.
Configuration Guides—DX-9100 Configuration Guide
99
Page 100
Remote Setpoint
Connections
RS1@, RS2@
Each of the two remote setpoints (RSP1, RSP2) is an analog variable to
the control module, in units of the PV, which produces a bias in the
respective local setpoint. If the input is not connected, the controller will
use the default value 0.
WSPn = RVn (RSPn + LSPn) + (bias)n n = 1, 2
Via the GX Tool
Make a connection between the source point and RS1@ in the destination
control module. Make a connection between the source point and RS2@
destination point.
Via the SX Tool
Configure the software connection by entering the source addresses of the
selected remote setpoint under Program Modules at Alg. Items RS1@
(RI.11) and RS2@ (RI.18).
Reference
Variable
Connection
RV1@, RV2@
Reverse Action
Connection RA@
Each of the two reference variables (RV1, RV2) is an analog input to the
control module, which causes the respective loop in the control module to
perform as a ratio controller. Its effect is a multiplier in the working
setpoint calculation. If the input is not connected, the controller will use
the default value 1.
WSPn = RVn (RSPn + LSPn) + (bias)n n = 1, 2
Via the GX Tool
Make a connection between the source point and RV1@ in the destination
control module. Make a connection between the source point and RV2@
destination point.
Via the SX Tool
Configure the software connection by entering the source addresses of the
selected reference variable under Program Modules at Alg. Items RV1@
(RI.12) and RV2@ (RI.19).
!
CAUTION: The reverse action connection is a logic input to the
control module which changes the action of both
controllers from direct to reverse or vice versa.
Extreme caution is advised with this connection when
setpoint biases are also being used as the sign of the
biases is not reversed. For correct controller operation,
WSP2 must always be greater than WSP1.
100
Configuration Guides—DX-9100 Configuration Guide
 Loading...
Loading...