

Page 1

MCAC806 Digital AC Servo Drive Manual
Address:Floor 2,Building A ,Hongwei Industrial Zone,Liuxian 3Road, Shenzhen,
Guangdong ,China
TEL:0755-26509689 26502268
Fax:0755-26509289
E-mail:info@jmc-motion.com
Http: //www.jmc-motion.com
Page 2

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
2
All contents of this manual, copyrights owned by , Shenzhen Just
Motion Control Electromechanics Co.,Ltd., without our permission, no u
nit or individual may imitate, copy, reproduce. This manual without any
form of warranty, express or implied other. Information is subject to dir
ect or indirect information products mentioned in this manual, caused b
y the outflow, resulting in loss of profits consequences, Shenzhen Just
Motion Control Electromechanics Co.,Ltd.and an employee does not bear
any responsibility. In addition, the products mentioned in this manual a
nd the information is for reference only, contents are subject to change
without notice.All Rights Reserved.
Shenzhen Just Motion Control Electromechanics Co.,Ltd.
www.jmc-motion.com 0755-26509689
Page 3

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
3
Contents
1 Overview
2 Characteristics
3 Ports Description and definition
3.1 Digital AC Servo Driver I/O
3.2 HALL&Encoder (D15 female)
3.3 Motor line port
3.4 Power port
3.5 The definition Crystal Head Connection
............................................................................................
..................................................................................
..................................................
....................................................
..............................................
........................................................................
...............................................................................
............................
4 Parameter adjustment and setting of the servo system
5 Technical indicators
......................................................................
......
4
4
5
5
7
8
9
10
11
19
6 Control signal connection
...........................................................
20
6.1 Control signals using a single-ended signal common
anode connection
................................................................
20
6.2 Control signals using a single-ended signal common
cathode wiring
www.jmc-motion.com 0755-26509689
......................................................................
21
Page 4

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
4
6.3 Differential control signal wiring
7 Dimensions
8 Connection
......................................................................................
......................................................................................
........................................
22
23
24
www.jmc-motion.com 0755-26509689
Page 5
Shenzhen Just Motion Control Electromechanics Co.,Ltd.
5
1 Overview
MCAC706 is designed and manufactured using DSP vector control,
closed loop servo drives with low-cost and all-digital AC.It includes three
adjustable feedback loop control which are position loop, speed loop and
current loop. It has stable performance which suitable for driving voltages
between 48V and 80V, and the power below 400W AC servo motor.
2 Characteristics
2.1 More than one kinds of pulse input mode
Pulse + direction
CW /CCW double pulse
A / B phase pulse
2.2 Servo reset input interface optocoupler isolation ERC
2.3 Current loop bandwidth: (-3dB) 2KHz (the typical value)
2.4 Speed loop bandwidth: 500Hz (the typical value)
2.5 Position loop bandwidth: 200Hz (the typical value)
2.6 Motor encoder inputs upright post :differential input (26LS32)
2.7 RS232C interface parameters available to download via PC
or text display
2.8 Overcurrent, I2T, overvoltage, undervoltage,Overtempera-
ture, speeding, over-differential protection
2.9 The green light indicates running and the red light indicates
that the protection or offline
www.jmc-motion.com 0755-26509689
Page 6

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
6
1
10
19
9
26
18
Terminal
No.
Sign Name Description
1 ENA+
Enable positive input High level 4 ~ 5V effective
2 ENA-
Enable negative input Low level 0 ~ 0.5V effective
3 PUL+
Positive input pulse High level 4 ~ 5V effective
3 Ports Description and definition
3.1 Digital AC Servo Driver I/O
www.jmc-motion.com 0755-26509689
Page 7
Shenzhen Just Motion Control Electromechanics Co.,Ltd.
7
4 PUL-
Negative input pulse Low level 0 ~ 0.5V effective
5 DIR+
6 DIR-
The direction of the
positive input
The direction of the
negative input
Result
High level 4 ~ 5V effective
Lowlevel 0 ~ 0.5V effective
7 FL
8 RL Result
9 SGND
output power ground
10 PEND+ Place positive output Output current 20mA
11 PEND- Place negative output
12 ALM+ Alarm positive output Output current 20mA
13 ALM- Alarm negative output
14 REF+ Result
15 REF- Result
16 NC Result
17 FG Result
18 SGND Power ground
www.jmc-motion.com 0755-26509689
Page 8
Shenzhen Just Motion Control Electromechanics Co.,Ltd.
8
1
5
11
15
6
10
19 +5V Power
20 EA+
21 EA-
22 EB+
23 EB-
24 EZ+
25 EZ-
26 SGND Power ground
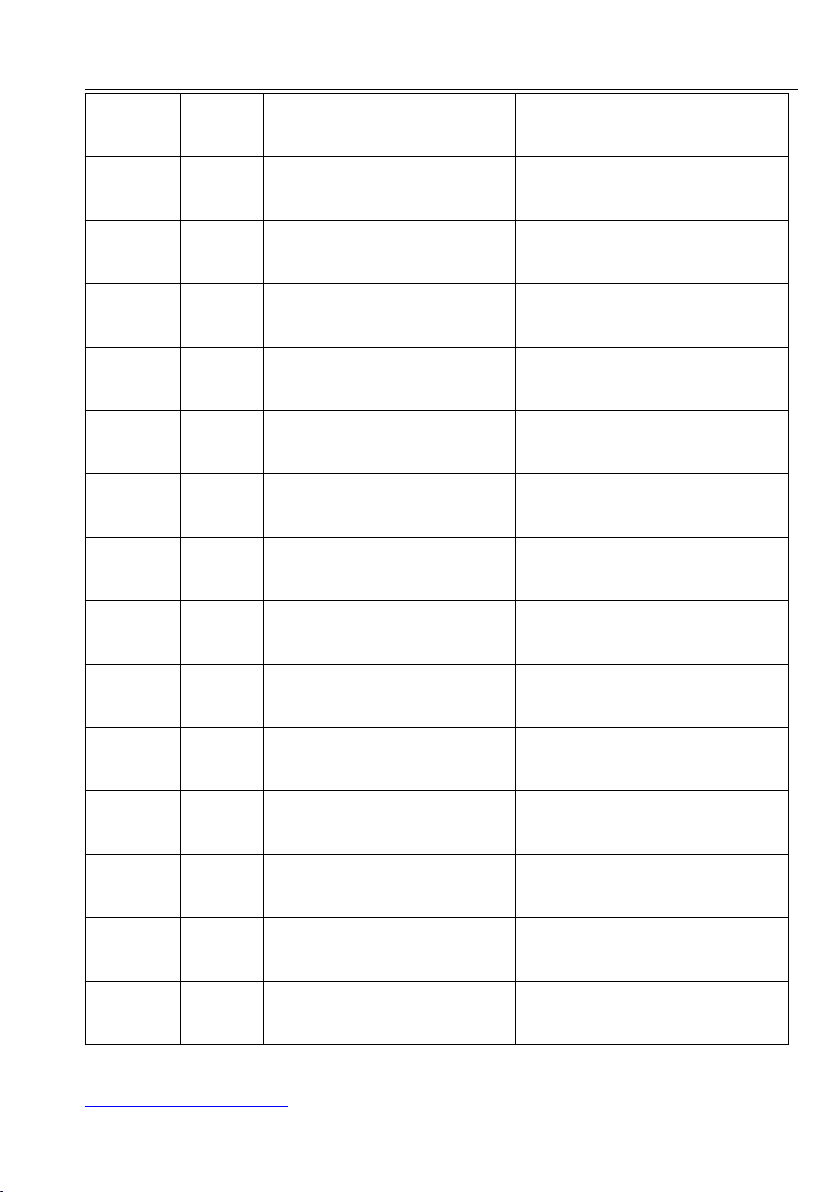
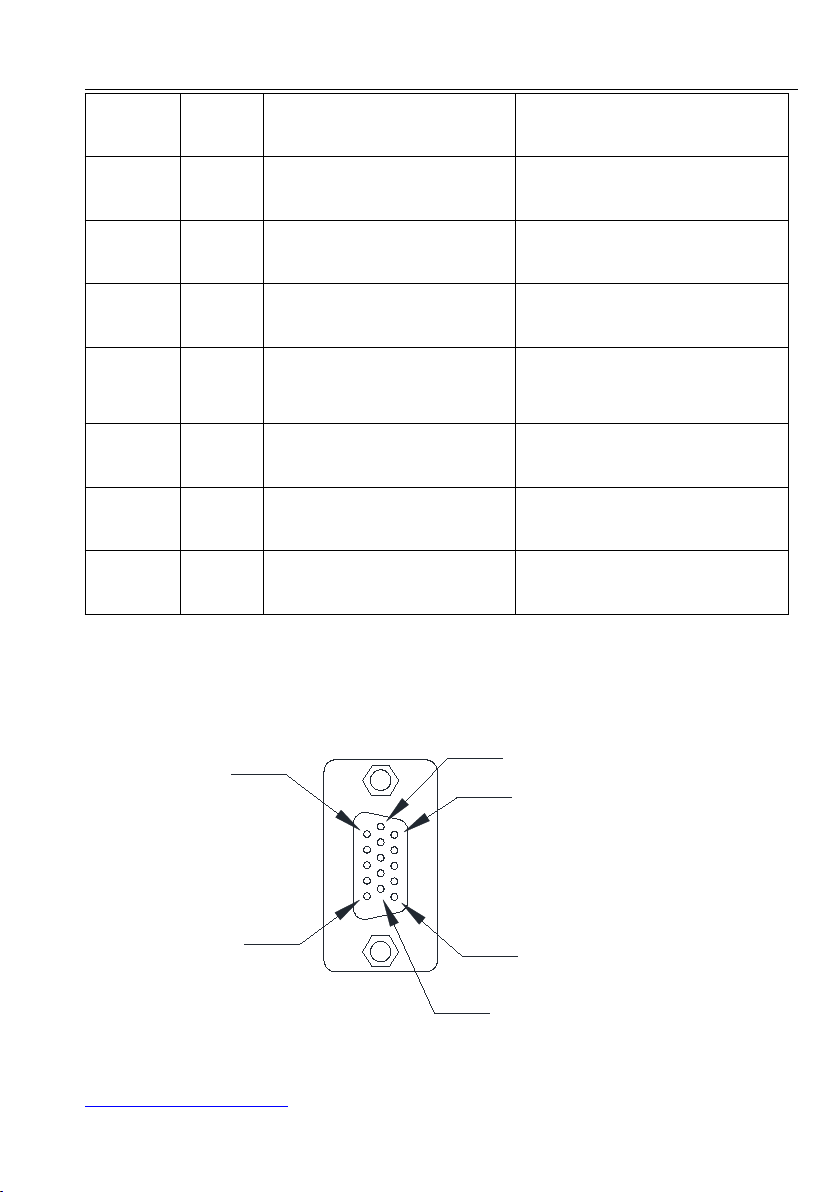
3.2 HALL&Encoder (D15 female)
A-phase Encoder positive
input
A-phase Encoder negative
input
B-phase Encoder positive
input
B-phase Encoder negative
input
Z-phase Encoder positive
input
Z-phase Encoder negative
input
differential input
differential input
differential input
differential input
differential input
differential input
www.jmc-motion.com 0755-26509689
Page 9

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
9
Z-phase Encoder negative input
A-phase Encoder negative input
B-phase Encoder negative input
Terminal
No.
1 PA+
2 PB+
3 GND
4 PW+
5 PU+
6 Mask
7 PZ+
8 PZ-
Sign Name Description
A-phase Encoder positve input
B-phase Encoder positve input
Output power ground
W-phase pole positive input Single-side connection
U-phase pole positive input Single-side connection
Z-phase Encoder positve input
9 PV+
V-phase pole positive input Single-side connection
10 NC
11 PA-
12 PB-
13 VCC
www.jmc-motion.com 0755-26509689
Output power 50mA
Page 10

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
10
3.3 Motor line port
1
2
3
4
Terminal
No.
Sign Name Description
1 W
Motor W side
2 V
Motor V side
3 U
Motor U side
4 PE
Grounding
14 NC
15 NC
www.jmc-motion.com 0755-26509689
Page 11

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
11
1
2
3
Terminal
No.
Sign Description
1 GND DC ground
2 VDC DC 36~80V
3 Rbrake NC
3.4 Pow er port
www.jmc-motion.com 0755-26509689
Page 12

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
12
PIN1
PIN6
Pin No. Definition
PIN1 TXD
PIN2 RXD
PIN3 NC
PIN4 NC
PIN5 NC
PIN6 GND
3.5 The definition Crystal Head Connection
www.jmc-motion.com 0755-26509689
Page 13

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
13
4 Parameter adjustment and setting of the servo
system
MCAC806 parameter modification step
Select MCAC806 communication-specific software, double-click to open the
following diagram:
www.jmc-motion.com 0755-26509689
Page 14

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
14
In the dialog box, select the corresponding communication COM port, baud rate
is set to 57600, in point connection operating below:
Click on the link in, there is connected shown in the dialog box below:
www.jmc-motion.com 0755-26509689
Page 15

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
15
If the connection is failed , make sure that the COM port is selected right, drive to
work again to retry;Exit communication settings:
www.jmc-motion.com 0755-26509689
Page 16

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
16
Select System Settings, then data of the software is initial status, no data;
www.jmc-motion.com 0755-26509689
Page 17

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
17
Click Upload, you can put the drive parameters are displayed, if need a
parameter, enter a value, or use the mouse to select items, click "download"
button, then the parameter update to the drive, in the attempt to upload, you can
check the data whether the update was successful as shown:
Exit interface, select the parameter settings as shown below:
www.jmc-motion.com 0755-26509689
Page 18

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
18
Pop-up parameter setting dialog box, the parameter settings
according to upload → modify→ Download → upload step, four
main items position loop, velocity loop, current loop, threshold
setting requires a single download, click to download individual
effective as shown below:
www.jmc-motion.com 0755-26509689
Page 19

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
19
www.jmc-motion.com 0755-26509689
Page 20

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
20
The above picture is only for reference, in case of doubt, please contact JMC
after-sales Services!
* Note: The parameter may need to be increased or decreased based on the
different mechanical structure.
www.jmc-motion.com 0755-26509689
Page 21

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
21
5 Technical indicators
5.1 DC input voltage range 36 ~ 80V (48V typical)
5.2 200W continuous output power
5.3 Continuous output current 6A 32KHz PWM
5.4 Overload output current 18A (3 seconds)
5.5 Protection:
Action value over current peak
Overload I2t current action value
Overheating action value
overvoltage voltage action value
85V
Action value 18V voltage undervoltage
30A ± 10%
300% 5S
80 ℃
5.6 Maximum pulse input frequency 300K
5.7 Default communication speed 9.6Kbps (requires additional
interface converter)
5.8 Use of the environment:
Occasions: Avoid dust, oil mist and corrosive gases
Working temperature: 0 ~ +50 ℃
Storage temperature: -20 ℃ ~ +80 ℃
Humidity: 40 ~ 90% RH
Cooling: Natural cooling or forced air cooling
www.jmc-motion.com 0755-26509689
Page 22

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
22
5.9 Overall dimensions 171 × 99 × 44
5.10 Weight about 550 grams
www.jmc-motion.com 0755-26509689
Page 23

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
23
6 Control signal connection
6.1 Control signals using a single-ended signal common
anode connection, as show n below:
Note
www.jmc-motion.com 0755-26509689
When VCC is 5V, R shorted;
:
When VCC is 12V, R is 1K, more than 0.125W resistance;
VCC is 24V, R is 2K, 0.125W greater resistance;
Above resistance must be connected to the control signal terminal.
Page 24

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
24
6.2 Control signals using a single-ended signal common
cathode w iring, as shown below:
Note
www.jmc-motion.com 0755-26509689
When VCC is 5V, R shorted;
:
When VCC is 12V, R is 1K, more than 0.125W resistance;
VCC is 24V, R is 2K, 0.125W greater resistance;
Above resistance must be connected to the control signal terminal.
Page 25

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
25
6.3 Differential control signal wiring, wiring diagram is
shown below:
www.jmc-motion.com 0755-26509689
Page 26

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
26
7 Dimensions
www.jmc-motion.com 0755-26509689
Page 27

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
27
8 Connection
The driver can provide +5 V, maximum 80mA of power to the encoder.
Four-octave counting mode, the encoder resolution is multiplied by four the
number of pulses per servo motor revolution.
www.jmc-motion.com 0755-26509689
Page 28

Shenzhen Just Motion Control Electromechanics Co.,Ltd.
28
www.jmc-motion.com 0755-26509689
 Loading...
Loading...