

JAI VIS-CAM System TS-1327EN, VIS-CAM System TS-2030EN, VIS-CAM System TS-9720EN, VIS-CAM System Installation Manual
Page 1

VIS-CAM System
Vehicle Imaging Subsystem
Document Version: 10436
Document P/N: C
Page 2

Page 3

VIS-CAM System
Notice
The material contained in this manual consists of information that is proprietary to JAI Inc., and
may only be used by the purchasers of the product. JAI Inc. makes no warranty for the use of its
product and assumes no responsibility for any errors which may appear or for damages resulting
from the use of the information contained herein. JAI Inc. reserves the right to make changes
without notice.
Microsoft, Windows XP, Windows 2000, Windows 98, Windows NT, and Windows Explorer are either
registered trademarks or trademarks of Microsoft Corporation in the United States and/or other
countries.
Warranty
Each JAI product is warranted to be free from defects in material and workmanship under normal
intended use and service if installed in accordance with this manual. The warranty period is 2-years
and begins on the date of shipment from JAI stock.
This warranty shall not apply to repairs or replacements necessitated by any cause beyond the
control of JAI, including but not limited to, 1) improper installation, 2) acts of nature, 3) accidents,
4) misuse, 5) lack of proper maintenance, 6) unauthorized repairs or modifications.
Be advised, that you need to obtain an RMA number from JAI before returning units for warranty
repair.
Certifications
CE Compliance
The TS-2030EN, TS-1327EN and TS-9720EN series of cameras have been certified to conform to the
requirements of Council Directive 89/336/EC for electromagnetic compatibility and to comply with
the following European Standards:
Emissions: EN 55022A: 1998 + A1: 2000 + A2: 2003
Immunity: EN55024: 1998 + A1: 2001 + A2: 2003
All JAI products bearing the CE mark have been declared to be in conformance with the applicable
EEC Council Directives. However, certain factory-installed options or customer-requested
modifications may compromise electromagnetic compatibility and affect CE compliance. Please
note that the use of interconnect cables that are not properly grounded and shielded may affect CE
compliance.
Contact JAI Applications Engineering Department for further information regarding CE compliance.
FCC
This equipment has been tested and found to comply with the limits for a Class A digital device,
pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection
against harmful interference when the equipment is operated in a commercial environment. This
equipment generates, uses and can radiate radio frequency energy and, if not installed and used in
accordance with the instruction manual, may cause harmful interference to radio communications.
Operation of this equipment in a residential area may cause harmful interference, in which case the
user will be required to correct the interference at his own expense.
Disclaimer iii
Page 4

VIS-CAM System
WARNING
Changes or modifications to this unit not expressly approved by the party responsible for FCC
compliance could void the user’s authority to operate the equipment.
VIS-CAM System Installation Manual
JAI Inc.
625 River Oaks Parkway
San Jose, CA 95134
Tel:(408) 383-0300
Tel:(800) 445-5444
Fax:(408) 383-0301
E-mail: trafficsales.americas@jai.com
trafficsales.emea@jai.com
www.jai.com
October 30, 2008
iv Disclaimer
Page 5

VIS-CAM System
Table of Contents
Introduction ............................................................................................. 1
1
1.1 Document Overview ................................................................................... 1
1.2 Product overview ...................................................................................... 1
1.3 System Components description ..................................................................... 2
1.3.1 Traffic Light Sensor – TLS300 ........................................................................ 2
1.3.2 VISCAM ................................................................................................... 3
1.3.3 Illumination ............................................................................................. 4
1.3.4 VJP-300 Junction Panel. .............................................................................. 4
1.3.5 RS485 Device Server. .................................................................................. 4
1.3.6 ENSetup Program. ..................................................................................... 4
1.4 Operational Overview. ................................................................................ 4
1.4.1 Trigger Mode ............................................................................................ 4
2 Preparing for installation ............................................................................. 5
2.1 Installation Preparation ............................................................................... 5
2.1.1 Over Lane Positioning ................................................................................. 5
2.1.2 Side of Road Installation ............................................................................. 14
3 Installing the Vehicle Imaging System ............................................................. 17
3.1 Installing the TNF-300 Traffic Light Sensor. ...................................................... 17
3.1.1 To install the Traffic Light Sensor: ................................................................. 17
3.1.2 Optional Side Mount .................................................................................. 19
3.2 Installing the Camera(s) ............................................................................. 19
3.3 Installing the J-Panel ................................................................................. 23
3.3.1 X1 and X2 VIS CAM 300/400 ......................................................................... 23
3.3.2 X3, X7 Traffic Light Sensor .......................................................................... 24
3.3.3 X6 Power Input Connector ........................................................................... 25
3.3.4 X8 LS RS485 Out Connector ......................................................................... 26
3.3.5 X14 Trigger Input Connector ........................................................................ 27
3.3.6 X15 Lane Controller Connector (X4 and X5) ...................................................... 28
3.4 Illumination Options .................................................................................. 29
3.4.1 Installing the TNF-31 Flash .......................................................................... 29
3.5 Trigger Options ........................................................................................ 30
3.5.1 Installing The Laser Vehicle Detector ............................................................. 30
4 System Set-Up ......................................................................................... 33
4.1 Preparation for Alignment ........................................................................... 33
4.1.1 Pre-Alignment Checklist ............................................................................. 33
4.1.2 Select a Suitable Vehicle, License Plate, and Plate Stand for the Setup .................... 34
4.1.3 Select the Camera to Align .......................................................................... 34
4.1.4 Validate the Installation Geometry ................................................................ 34
4.1.5 Edit the alignment settings on the Setup Computer ............................................ 34
4.1.6 Connect the Setup Computer to the Camera ..................................................... 35
4.1.7 Drive and Park the Setup Vehicle Correctly ...................................................... 36
4.1.8 Properly Position the License Plate Stand ........................................................ 36
4.1.9 Perform Initial Lens Adjustment and Camera Aiming ........................................... 36
4.1.10 Finalize Lens Adjustments and Camera Aiming ................................................ 39
4.1.11 Flash Head Alignment .............................................................................. 42
5 Appendix A: Camera Functional and Connector Description ................................... 45
5.1 I/O Board Layout ...................................................................................... 46
5.2 X4: I/O Board Connection to J-panel .............................................................. 47
5.2.1 Functionality ........................................................................................... 47
5.2.2 Connector specification .............................................................................. 47
Table of Contents v
Page 6

VIS-CAM System
5.2.3 Connector signal specifications ..................................................................... 47
5.2.4 Electrical interface on the I/O board:............................................................. 48
5.2.5 Connector physical Interface ....................................................................... 49
5.2.6 Typical wiring diagram. .............................................................................. 50
5.3 I/O Board Flash Connection ......................................................................... 50
5.3.1 Functionality .......................................................................................... 50
5.3.2 Connector specification.............................................................................. 50
5.3.3 Connector signal specifications ..................................................................... 51
5.3.4 Connector physical Interface ....................................................................... 51
5.3.5 Typical Wiring Diagram .............................................................................. 52
5.3.6 X6: I/O Board Night Light/2nd Flash Connection ................................................ 53
5.3.7 Functionality .......................................................................................... 53
5.3.8 Connector specification.............................................................................. 54
5.3.9 Connector signal specifications ..................................................................... 54
5.3.10 Typical Wiring Diagram ............................................................................ 55
5.4 Night Light TNC 100 Connection .................................................................... 57
5.5 X7:I/O Board Laser Vehicle Detector Connection ............................................... 57
5.5.1 Functionality .......................................................................................... 58
5.5.2 Connector specification.............................................................................. 58
5.5.3 Connector signal specifications ..................................................................... 58
5.5.4 Connector physical Interface ....................................................................... 59
5.6 X1, X3: I/O Board Ethernet Test Connectors ..................................................... 59
5.6.1 Functionality .......................................................................................... 59
5.6.2 Connector specification.............................................................................. 59
5.6.3 Connector signal specifications ..................................................................... 59
5.6.4 Connector physical Interface ....................................................................... 60
5.6.5 Test setup 1 ........................................................................................... 60
5.6.6 Test setup 2 ........................................................................................... 61
5.7 X15: I/O Board Auxiliary power connector ....................................................... 62
5.7.1 Functionality .......................................................................................... 62
5.7.2 Connector physical Interface ....................................................................... 62
5.8 Cables................................................................................................... 62
5.8.1 Cable Specifications .................................................................................. 62
5.8.2 Recommended Cables ................................................................................ 63
5.8.3 Mounting the cables .................................................................................. 63
6 Appendix B: J-Panel Functional and Connector Description ................................... 65
6.1 J-Panel Layout ........................................................................................ 65
6.2 X1: J-panel connection to Camera 0 ............................................................... 65
6.2.1 Functionality .......................................................................................... 66
6.2.2 Connector specification.............................................................................. 66
6.2.3 Connector signal specifications ..................................................................... 66
6.2.4 Connector physical Interface ....................................................................... 67
6.2.5 Typical Wiring diagram .............................................................................. 68
6.2.6 Indicators .............................................................................................. 68
6.2.7 Switches ................................................................................................ 68
6.3 X2: J-panel connection to Camera 1 ............................................................... 69
6.3.1 Functionality .......................................................................................... 69
6.3.2 Connector specification.............................................................................. 69
6.3.3 Connector signal specifications ..................................................................... 69
6.3.4 Connector physical Interface ....................................................................... 71
6.3.5 Typical Wiring diagram .............................................................................. 71
6.3.6 Indicators .............................................................................................. 72
6.3.7 Switches ................................................................................................ 72
6.4 X3: Light Sensor Connection ........................................................................ 72
6.4.1 Functionality .......................................................................................... 72
6.4.2 Connector specification.............................................................................. 73
vi Table of Contents
Page 7

VIS-CAM System
6.4.3 Connector signal specifications ..................................................................... 73
6.4.4 Connector physical Interface ....................................................................... 73
6.4.5 Indicators ............................................................................................... 73
6.5 X4: Lane Controller Signal to J-Panel #2 .......................................................... 73
6.5.1 Functionality ........................................................................................... 74
6.5.2 Connector specification .............................................................................. 74
6.5.3 Connector signal specifications ..................................................................... 74
6.5.4 Connector physical Interface ....................................................................... 74
6.6 X5: Lane Controller Signal from J-Panel #1 ....................................................... 74
6.6.1 Functionality ........................................................................................... 74
6.6.2 Connector specification .............................................................................. 74
6.6.3 Connector signal specifications ..................................................................... 75
6.7 X6, X7: 24V DC Power ................................................................................ 75
6.7.1 Functionality ........................................................................................... 75
6.7.2 Connector specification .............................................................................. 76
6.7.3 Connector signal specifications ..................................................................... 76
6.7.4 Connector physical Interface ....................................................................... 76
6.8 X8: RS485 signal to Ethernet interface ............................................................ 76
6.8.1 Functionality ........................................................................................... 76
6.8.2 Connector specification .............................................................................. 77
6.8.3 Connector signal specifications ..................................................................... 77
6.8.4 Connector physical Interface ....................................................................... 77
6.9 X11: Ethernet Interface from Camera 0 ........................................................... 77
6.9.1 Functionality ........................................................................................... 77
6.9.2 Connector specification .............................................................................. 78
6.9.3 Connector signal specifications ..................................................................... 78
6.9.4 Connector physical Interface ....................................................................... 78
6.10 X12: Ethernet Interface from Camera 1 ........................................................... 78
6.10.1 Functionality ......................................................................................... 78
6.10.2 Connector specification ............................................................................ 78
6.10.3 Connector signal specifications ................................................................... 79
6.10.4 Connector physical Interface ..................................................................... 79
6.11 X14: External Trigger ................................................................................. 79
6.11.1 Functionality ......................................................................................... 79
6.11.2 Connector specification ............................................................................ 80
6.11.3 Connector signal specifications ................................................................... 80
6.11.4 Connector physical Interface ..................................................................... 81
6.12 X15: Lane Controller interface ..................................................................... 81
6.12.1 Functionality ......................................................................................... 81
6.12.2 Connector specification ............................................................................ 81
6.12.3 Connector signal specifications ................................................................... 81
6.12.4 Connector physical Interface ..................................................................... 82
6.12.5 Connecting Lane Controller RS485 signal between J-Panels ................................. 82
7 Appendix C: Two Cameras, One Flash Configuration ............................................ 83
8 Appendix D: Pluggable Terminal Blocks ........................................................... 85
9 Appendix E: Moxa N-Port 5232 Configuration .................................................... 87
10 Appendix F: Multiple Moxa N-port Configuration Diagram ..................................... 93
11 Appendix G: Ethernet Requirements. ............................................................. 95
12 Appendix H: Troubleshooting ....................................................................... 97
Table of Contents vii
Page 8

VIS-CAM System
viii Table of Contents
Page 9

VIS-CAM System
List of Figures
Figure 1.
Figure 2. Back shot VIS installation. ............................................................................ 3
Figure 3. Typical Over Lane Site Layout ....................................................................... 5
Figure 4. Typical Over Lane Site Layout Plan. ................................................................ 6
Figure 5. VIS 300 U.S. Camera options chart. ................................................................. 8
Figure 6. VIS 300 European Camera options chart. ......................................................... 11
Figure 7. Typical side of road installation. ................................................................... 14
Figure 8. Typical side of road installation plan view with no canopy/overhead structue. ........... 14
Figure 9. Flash and camera distances. ........................................................................ 15
Figure 10. Install the traffic light sensor. ...................................................................... 17
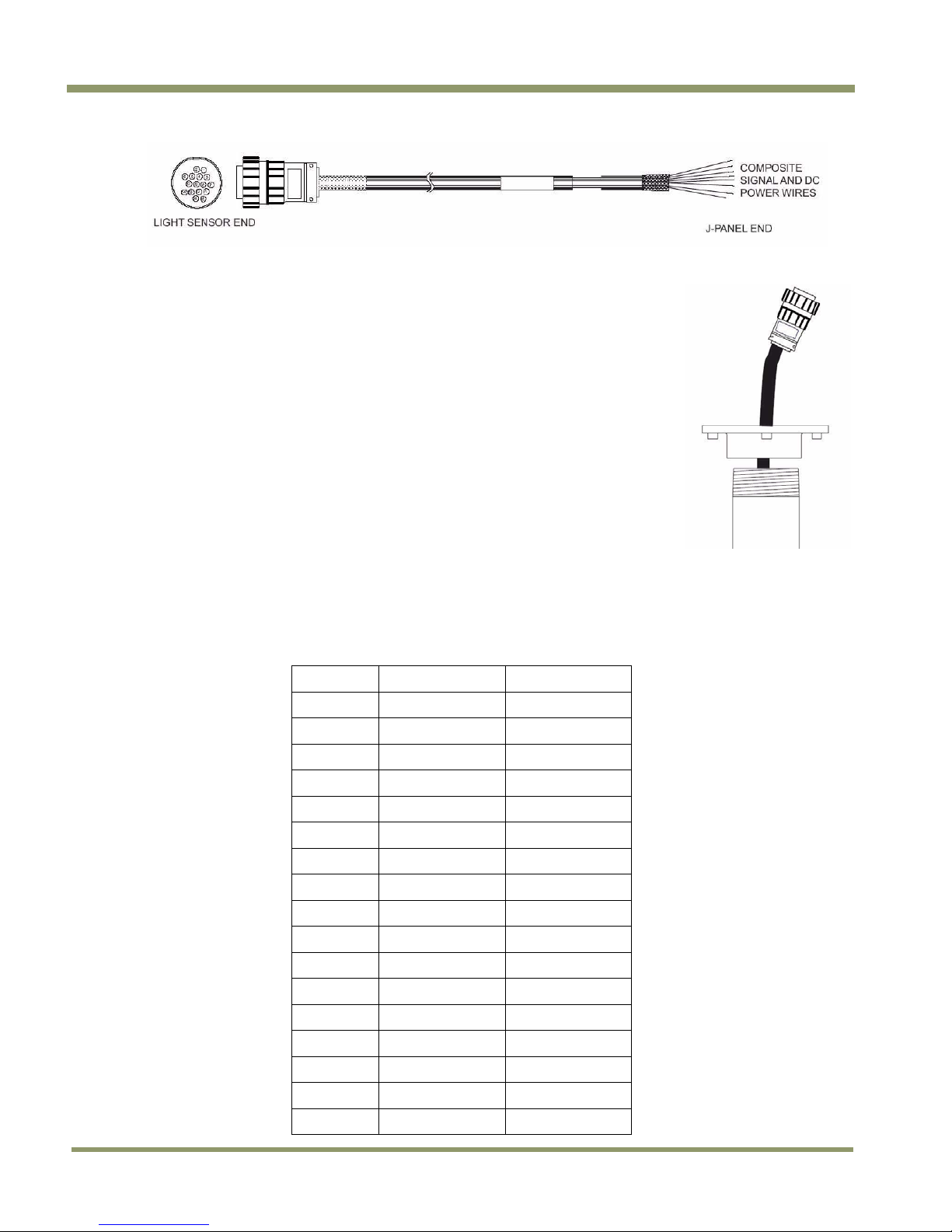
Figure 11. TLS-300 signal and power cable. ................................................................... 18
Figure 12. Installing the TLS-300 through the mounting pipe and flange. ............................... 18
Figure 13. Pipe clamps should be about 6-inches apart on a vertical surface. ......................... 19
Figure 14. Camera Installation ................................................................................... 19
Figure 15. Camera mount template. ............................................................................ 20
Figure 16. Camera cabling as it appears before electrical installation. .................................. 20
Figure 17. Cable final wiring. .................................................................................... 21
Figure 18. Properly wired X-4 connector. ...................................................................... 22
Figure 19. Back of the video camera. .......................................................................... 22
Figure 20. VIS CAM connections.................................................................................. 24
Figure 21. TLS 300 to J-Panel wiring. ........................................................................... 25
Figure 22. X-6 Power input connection. ........................................................................ 26
Figure 23. Wiring for the X8 to converter connector. ........................................................ 27
Figure 24. Test trigger ............................................................................................ 28
Figure 25. Two lane controller. .................................................................................. 29
Figure 26. TNF-31 flash unit ...................................................................................... 29
Figure 27. S3 switch setting ...................................................................................... 30
Figure 28. Connecting an AC flash. ............................................................................. 30
Figure 29. Connection for LVD to VIS CAM 400. ............................................................... 31
Figure 30. Example of a network connection using a local switch. ........................................ 35
Figure 31. Initial Camera Alignment Display example. ...................................................... 37
Figure 32. Roll Bar Display example. ........................................................................... 38
Figure 33. Readjustment of camera tilt and zoom display. ................................................. 39
Figure 34. Focus Bar marker display. ........................................................................... 40
Figure 35. Focus Bar Waveform display. ....................................................................... 41
Figure 36. Focus Bar Waveform Display with waveform cursors. ........................................... 42
Figure 37. Connection requirements. ........................................................................... 45
Figure 38. Component layout of the EN board. ............................................................... 46
Figure 39. Board connections .................................................................................... 47
Figure 40. Interface drawing. .................................................................................... 48
Figure 41. Electrical interface ................................................................................... 48
Figure 42. Physical interface table. ............................................................................. 49
Figure 43. Category 5 or 6 wiring diagram. .................................................................... 50
Figure 44. Flash connections. .................................................................................... 50
Figure 45. I/O board electrical interface. Test ............................................................... 51
Figure 46. Switch location. ....................................................................................... 51
Figure 47. Connecting DC Flash to a board powered from the Flash power supply. .................... 52
Figure 48. Connection DC Flash to an internally powered board. .......................................... 52
Figure 49. AC flash unit connection. ............................................................................ 53
Figure 50. Second flash connection. ............................................................................ 53
Figure 51. IO board electrical interface. ....................................................................... 54
VIS elements ............................................................................................ 2
List of Figures ix
Page 10

VIS-CAM System
Figure 52. Wiring a second DC flash from the flash power supply. ........................................ 55
Figure 53. Connecting to a 2nd DC Flash unit with the I/O Board electronics internally powered.. . 56
Figure 54. Connecting the second AC flash. ................................................................... 56
Figure 55. Connecting to the night light (TNC 100) .......................................................... 57
Figure 56. Detection board ....................................................................................... 57
Figure 57. LVD Trigger Input ..................................................................................... 58
Figure 58. Electrical interface on the I/O board:............................................................. 58
Figure 59. Ethernet test connectors. ........................................................................... 59
Figure 60. EN network test configuration setup. ............................................................. 60
Figure 61. Test setup 2. .......................................................................................... 61
Figure 62. Auxiliary power connector .......................................................................... 62
Figure 63. EN-CAM component layout. ......................................................................... 65
Figure 64. Connecting from J-Panel to camera zero. ........................................................ 65
Figure 65. J-Panel electrical interface ......................................................................... 66
Figure 66. Ethernet wiring diagram. ............................................................................ 68
Figure 67. Board and camera J-panel connection to camera 1. ............................................ 69
Figure 68. J-panel electrical interface ......................................................................... 70
Figure 69. Category 5 or 6 ethernet wiring diagram. ........................................................ 71
Figure 70. Light sensor indicator on the board ................................................................ 72
Figure 71. Light sensor connector ............................................................................... 72
Figure 72. Signal to J-panel #2 .................................................................................. 73
Figure 73. Signal from J-panel #1 ............................................................................... 74
Figure 74. Signal from J-panel #1 ............................................................................... 75
Figure 75. Principle in the power distribution. ............................................................... 76
Figure 76. RS485 to Ethernet .................................................................................... 76
Figure 77. Interface from Camera 0 ............................................................................ 77
Figure 78. Interface from Camera 1 ............................................................................ 78
Figure 79. External Trigger connection. ....................................................................... 79
Figure 80. Trigger polarity ....................................................................................... 80
Figure 81. Trigger 0 ................................................................................................ 80
Figure 82. Trigger 1 ................................................................................................ 80
Figure 83. Lane controller setup diagram. ..................................................................... 81
Figure 84. Lane controller setup. ............................................................................... 82
Figure 85. Two camera, one flash, configuration. ........................................................... 83
Figure 86. Terminal block ........................................................................................ 85
Figure 87. Standard configuration of Basic Settings: ......................................................... 87
Figure 88. Standard configuration of Network Settings: ..................................................... 88
Figure 89. Standard configuration of Serial settings for port 1: ............................................ 89
Figure 90. Standard configuration of Serial settings for port 2: ............................................ 90
Figure 91. Configuration overview of serial port 1 and 2. ................................................... 90
Figure 92. Operation configuration of Serial port 1: ......................................................... 91
Figure 93. Operation configuration of Serial port 2: ......................................................... 92
Figure 94. Configuration overview of operating settings for serial port 1 and 2. ....................... 92
Figure 95. Moxa configuration example. ....................................................................... 93
Figure 96. Network cabling example: .......................................................................... 95
x List of Figures
Page 11

VIS-CAM System
List of Tables
Table 1
Table 2 Electrical wiring for the VIS CAM installation. ................................................... 21
Table 3 VIS CAM connections to the J-Panel. .............................................................. 23
Table 4 TLS 300 to J-Panel connections. .................................................................... 24
Table 5 Power input to the J-Panel .......................................................................... 25
Table 6 X8 to converter connector ........................................................................... 26
Table 7 Trigger input connector. ............................................................................. 27
Table 8 X15 Lane Controller .................................................................................. 28
Table 9 Flash unit connection in VIS CAM 400. ............................................................. 29
Table 10 Optimal Illumination Distance Between Camera and TNF ...................................... 30
Table 11 Wiring for LVD to VIS CAM 400. ..................................................................... 31
Table 12 Typical minimum plate heights and nominal plate heights: ................................... 34
Table 13 Optimal Illumination Distance Between Camera and TNF ...................................... 43
Table 14 Wiring diagram. ....................................................................................... 51
Table 15 Physical interface pinouts. .......................................................................... 55
Table 16 Connector table ....................................................................................... 59
Table 17 Signal parameters and conditions. ................................................................. 66
Table 18 Physical interface table .............................................................................. 67
Table 19 LED indicators ......................................................................................... 68
Table 20 Switch labels ........................................................................................... 68
Table 21 Signal table ............................................................................................ 70
Table 22 Ethernet physical connections ...................................................................... 71
Table 23 LED indicators ......................................................................................... 72
Table 24 Connector switches ................................................................................... 72
Table 25 Physical interface connections ..................................................................... 73
Table 26 LED physical indicators .............................................................................. 73
Table 27 Physical connector table for J-panel 2. ........................................................... 74
Table 28 Physical pin connections J-panel #1. .............................................................. 75
Table 29 Physical connection for pins. ....................................................................... 76
Table 30 RS485 physical connections ......................................................................... 77
Table 31 Physical connector description ..................................................................... 78
Table 32 Pin connections for Ethernet from Camera 1. .................................................... 79
Table 33 Connector table ....................................................................................... 81
Table 34 WAGO physical interface ............................................................................ 82
Table 35 Master to slave connections. ........................................................................ 84
Table 36 Essential specifications for the pluggable terminal block. ..................................... 85
Table 37 Troubleshooting table. ............................................................................... 97
Light Sensor Cables ................................................................................... 18
List of Tables xi
Page 12

VIS-CAM System
xii List of Tables
Page 13

VIS-CAM System
1.VIS-CAM System Installation Manual
1 Introduction
1.1 Document Overview
This document describes the steps necessary to deploy an installation of the JAI Vehicle Imaging
Subsystem, described as VIS from this point forward.
This manual also contains information about maintenance, troubleshooting and RMA (Return
Material Authorization) procedures.
JAI strongly recommends that the installer read this manual thoroughly, in order to obtain sufficient
knowledge about the VIS equipment, before initiating the actual installation.
1.2 Product overview
The JAI VIS consists of the following components:
• TLS-300 Traffic light sensor.
• The VIS Camera, comprised of an EN- camera with zoom-lens or fixed focal length lens, and an
anti-glare filter, a weatherproof housing with sun shield, heater resistors, interconnection PCB,
and a pan-tilt-roll mounting bracket.
• TNF-31 Flash unit or optional TNC-60 permanent illumination.
• VJP-300 EN-Junction panel with terminal blocks and RJ-45 connectors
and embedded diagnostics Features
• RS485-to-Ethernet Converter
• System interconnection cables
• Optional gigabit Ethernet switch
• Optional 24V DC Power Supply
• Optional Laser Vehicle Trigger
• ENSetup Program
• Installation Documentation
Introduction 1
Page 14

VIS-CAM System
Figure 1. VIS elements
1.3 System Components description
1.3.1 Traffic Light Sensor – TLS300
The JAI traffic light sensor is the driver of the VIS control network. It controls video signal
parameters of each camera to ensure high contrast images of passing vehicles and their license
plates, regardless of vehicle speed, weather or ambient light conditions.
Under the clear plastic dome of the traffic light sensor are mounted, in opposing directions, two
vertical plates and corresponding light collection staffs that protrude above a flat black base plate.
The sensor measures the ambient light reflecting off the face of both vertical plates. The design is
such that when the face of one plate is in direct sun, the other one is in shadow. These two
measurements identify the range of light levels that the camera is required to image without
saturation when a vehicle and its license plate are in the camera’s field of view (FOV). To ensure
correct functionality of the TLS-300, it is very important to ensure during installation, that the
sensor’s base plate is levelled with the road surface, and that the orientation of the sensor is
rotated so that the direction from the vertical plate A to vertical plate B is the same as the
direction of the traffic flow being observed by the traffic camera (see Figure 2).
2 Preparing for Installation
Page 15

VIS-CAM System
Figure 2. Back shot VIS installation.
The TLS-300 light sensor is an essential component that ensures the VIS cameras will be ready to
capture high quality images of any vehicle and its license plate in virtually all weather and light
conditions.
It is very important to ensure that sensor positioning closely resembles real road conditions where
the vehicle image is most likely to be captured.
The light sensor is connected by means of the J-Panel VJP-300 and an RS485-to-Ethernet converter
to the Ethernet switch.
1.3.2 VISCAM
The VISCAM uses a state-of-the-art progressive interline transfer CCD that captures all of the
vertical resolution at once, thereby eliminating field-to-field imaging delays. The use of progressive
scanning allows the camera to freeze the motion of a rapidly moving vehicle at high resolution.
The VISCAM 300 houses a JAI TS-9720EN, the VISCAM 350 houses a JAI TS-1327EN, and the VISCAM
400 houses the TS-2030EN Ethernet camera with a built in IBM Power PC using an embedded Linux
O/S and 64Mb memory for various operations, such as frame store, JPEG compression, vehicle
fingerprint extraction, license plate find, running applications, and so on.
When the TLS-300 Traffic Light Sensor is used to control the VISCAM exposure settings, no moving
parts (such as an auto-iris lens) are included in the VIS system. This helps ensure high reliability for
the system.
A 12.5 mm to 75 mm manual zoom lens is provided as a standard with the VISCAM 300. This allows
the VISCAM to be mounted in a wide range of positions while ensuring sufficient resolution on the
vehicle license plates. A 35 mm fixed focal length lens is provided standard with the VISCAM 400. A
zoom lens is also available as an option. An anti-glare polarizing filter is mounted in front of the lens
to reduce smear in the picture caused by sun glints.
Introduction 3
Page 16

VIS-CAM System
1.3.3 Illumination
1.3.3 (a) TNF-31 Flash
The TNF-31 Flash generates light in wavelengths that are invisible to the human eye, but visible to
the camera. This makes the flash suitable for illuminating both oncoming and receding views of
traffic. Unlike near-infrared illuminators, the TNF-31 yields high contrast images of license plates
even if they have red characters on white or yellow backgrounds.
The TNF-31 Flash is automatically enabled whenever the TLS-300 Light Sensor determines that
ambient light is insufficient to produce a picture of usable quality. When the TNF-31 is enabled, it
fires every time the vehicle detector triggers the camera.
1.3.3 (b) White light LED.
JAI offers White LEDs mounted inside the camera enclosure. This option is usually employed when
certain rare color combinations on license plates do not yield sufficient contrast with the TNF-31
Flash option alone.
1.3.4 VJP-300 Junction Panel.
The VIS J-Panel is the central connection point for the VIS components. The J-Panel is a DIN-Rail
mounted PCB equipped with various interface terminals for interconnection of the VIS components;
this can be Ethernet connection, serial connection, TTL trigger feed and power supply. It offers the
possibility of manually selecting trigger polarity to the camera. Furthermore the J-Panel is equipped
with status LED’s and trigger switches for diagnostics and troubleshooting purposes.
1.3.5 RS485 Device Server.
The MOXA RS485 Device Server enables connection of RS485 serial devices to the Ethernet. The
purpose for the MOXA RS485 Device Server in the VIS system is to convert Ethernet to RS485
communication for the TLS-300 Light Sensor.
1.3.6 ENSetup Program.
The ENSetup Program is an Ethernet based software tool specifically designed to assist the installer
with VIS installation, and EN-Camera configuration and diagnostics. The program runs on a standard
PC / Laptop with Windows XP installed. Refer to Section 4 on page 31 of this manual and the VISCAM
300/400 EN Setup Manual for details.
1.4 Operational Overview.
During installation, the VISCAM and the optional light source are aimed at the area of the road
where vehicles and their license plates are most likely to pass through. The Traffic Light Sensor
continually registers the ambient light. The camera uses this information to set up exposure
variables to ensure an optimal image of the vehicle and license plate. During transition from day to
night the camera enables the optional TNF-31 Flash and/or white light LED’s to secure adequate
image quality during low ambient light conditions.
1.4.1 Trigger Mode
• A vehicle passes by a vehicle detector, sending a trigger to the VIS.
• The VIS employs a trigger to snap a video image of the vehicle and license plate when they are
optimally positioned in the camera field of view.
• The optional flash, if used, fires simultaneously with the camera to ensure correct exposure for
the image if the ambient lightning is too low.
4 Preparing for Installation
Page 17

VIS-CAM System
2 Preparing for installation
2.1 Installation Preparation
To prepare for installation, consider the fundamental requirements for an effective deployment of
the Vehicle Imaging Subsystem. There are two basic ways to position the camera: over the lane or
beside the lane. Figure 3 and Figure 4 depict a typical over-lane installation. Figure 7 and Figure 8
on page 13 depict a typical beside-lane camera installation.
2.1.1 Over Lane Positioning
Over lane camera mounting is always employed when the road width being monitored contains more
than two lanes of traffic, when a convenient overhead structure is already in place, or when
preventing vandalism is a paramount concern.
The VIS’s varifocal (zoom) lens is adjusted during installation to create 135 pixels across a 1
foot wide license plate (standard for US style of plates, may differ by region) placed 2 feet
above the ground level at the nominal trigger position (loop or light curtain, etc.). This
resolution maximizes license plate reader, vehicl e matcher, or other image processing
techniques performance. The highest performan ce from the subsystem is achieved when the
variation in plate size is kept to within ± 5% which typically means that the vehicle trigger
accuracy should be within ± 1 foot (@ trigger plane defined by client.) at all speeds. Low
latency vehicle triggering is very important and should not be overlooked. Please contact JAI
for support on this issue.
Figure 3. Typical Over Lane Site Layout
Preparing for Installation 5
Page 18

VIS-CAM System
Figure 4. Typical Over Lane Site Layout Plan.
2.1.1 (a) Camera tilt considerations
The requirement to freeze the motion of high-speed vehicles limits how steep or shallow the tilt
angle of the camera may be. For example, it is important to prevent the horizon from appearing in
the image, and thereby allowing the sun to blind the camera. For over lane installations, a camera
tilt between 20° to 30° is recommended–with 25° being considered the optimal angle. This angle of
tilt is the best compromise between minimizing visibility blockages caused by closely spaced
vehicles and maximizing plate visibility for plate mounts that are slightly recessed or tilted
downwards.
2.1.1 (b) Asynchronous triggering considerations
When the VIS is operated in trigger mode, a vehicle detector is employed to cause the camera to
capture an image at the precise moment the vehicle is in the best position to image both the
vehicle and its license plate. The delay between the time the vehicle passes the trigger position on
the road and when the trigger signal actually reaches the VIS must be kept to a minimum to prevent
high-speed vehicles from moving out of the area viewed by the camera before the image is snapped.
2.1.1 (c) Camera height versus trigger distance considerations
It is critically important, to select the correct distance between the camera and the location on the
road where the camera is triggered to capture an image. Minimizing the cost of installation is
usually also an important concern. This means that whenever possible, it is best to use existing
structures or previously installed elements. The following charts (Figure 5 and Figure 6) provide a
wide range of trade-offs between camera height and trigger distance to enable the installer to
select convenient camera and light sensor locations relative to existing mounting structures and
vehicle trigger locations. Adhering to the installation options provided in the installation charts,
yields camera images that are generally suitable for automatic license plate readers (ALPR).
To use the charts correctly, please follow the steps below.
1. First measure the height above the road to convenient camera mounting locations.
2. Measure the distance along the road from directly beneath each candidate camera position to
convenient trigger locations.
6 Preparing for Installation
Page 19

VIS-CAM System
3. Select the appropriate installation chart for either USA or European style license plates. To
obtain charts for license plates from other countries, please contact the JAI ITS division directly
at (+1) 408 7470 300 – 102.
4. Plot the candidate camera-height / trigger-distance pairs on the chart and determine if the
selected location lies within the wedge of recommended values.
5. If several locations are suitable, choose the one that yields the greatest overall slant range
between camera and trigger location.
The standard VISCAM unit is equipped with a 25 – 75 mm zoom lens. This lens provides the full range
of camera height and trigger distance listed in the installation charts.
Preparing for Installation 7
Page 20

VIS-CAM System
Figure 5. VIS 300 U.S. Camera options chart.
8 Preparing for Installation
Page 21

VIS-CAM System
VIS 350 U.S. Camera options chart
Preparing for Installation 9
Page 22

VIS-CAM System
VIS 400 U.S. Camera options chart
10 Preparing for Installation
Page 23

VIS-CAM System
Figure 6. VIS 300 European Camera options chart.
Preparing for Installation 11
Page 24

VIS-CAM System
VIS 350 European Camera options chart
12 Preparing for Installation
Page 25

VIS-CAM System
VIS 400 European Camera options chart
Preparing for Installation 13
Page 26

VIS-CAM System
2.1.2 Side of Road Installation
Figure 7. Typical side of road installation.
Figure 8. Typical side of road installation plan view with no canopy/overhead
structue.
Generally the flash head must be separated from the camera by a radial distance of at least three
and a half feet (1.2 meters).
If the flash is positioned closer to the camera, reflections from the license plate will cause
overexposure.
If possible, position the flash head in level with the reference plane shown in Figure 9. This plane is
in level with the top surface of the camera enclosure, but slices through the center of the lens.
14 Preparing for Installation
Page 27

VIS-CAM System
1
Figure 9. Flash and camera distances.
Distance in Feet
TS-9720EN
3.5 TBD 2
TSC-9720EN TS-2030EN TSC-2030EN TS-2076EN TSC-2076EN TS-1327EN TSC-1327EN
TBD
TBD
TBD TBD
Preparing for Installation 15
Page 28

VIS-CAM System
16 Preparing for Installation
Page 29

VIS-CAM System
3 Installing the Vehicle Imaging System
The individual components of the system is electrically linked together as shown in Figure 1, “VIS
elements,” on page 2. The VIS CAM 300/400 camera has connections to the J-Panel and an optional
Flash, Night Light and Laser Vehicle Detector. The J-Panel has connection to two VIS CAM 300/400
cameras, one Traffic Light Sensor, a 24V Power Supply, a Lane Controller, a RS485-to-ethernet
converter for the light sensor signals, Trigger input, an optionally second J-Panel and finally a
gigabit Ethernet switch.
3.1 Installing the TNF-300 Traffic Light Sensor.
When installing the Traffic Light Sensor ensure the unit is positioned higher than either the camera
or the flash unit so the A-side is in direct sun whenever the targeted vehicles license plates are. See
Section 2.1 on page 6 for general site layout guidelines.
It is extremely important the light sensor be properly positioned at the site. The light sensor must
be placed so that no shadows from surrounding structures are cast on side A when the license plates
being imaged by the VISCAM are in direct sunlight.
Because sun angles at any given site can change according to time of day and time of year, it is
important to verify that the proposed setup will function on the actual spot.
3.1.1 To install the Traffic Light Sensor:
1. Disconnect Power
2. Loosen the four hex screws and remove the flange from the mounting base. See Figure 10.
Figure 10. Install the traffic light sensor.
Installing the Vehicle Imaging Subsystem 17
Page 30
VIS-CAM System
nc
nc
nc
nc
nc
nc
Figure 11. TLS-300 signal and power cable.
3. Route the Traffic Light Sensor end of the TLS-300 signal and power cable through the mounting
pipe and the flange (see Figure 12)
4. Screw the flange onto the pipe, finger-tight, to allow
subsequent minor adjustment
5. Attach the cable connector to the Traffic Light Sensor
6. Attach the Traffic Light Sensor body to the flange and secure
it with the four Allen screws
7. Orient the Traffic Light Sensor such that the white reflectors
are parallel to the trigger plane with side B facing (visible from)
the trigger plane
8. Route the free end of the cable to the VIS J-Panel in accordance
with the local code requirements
9. Connect the color-coded wires to J-Panel connector X3 as described
in “X3, X7 Traffic Light Sensor ” on page 22. Make sure that no power
is applied when performing any wiring operation.
Figure 12. Installing the TLS-300 through
the mounting pipe and flange.
Table 1 Light Sensor Cables
PIN# Wire color
1 White/green
2 Green
3 Red/blue
4 Blue/red
5 -
6 Yellow
7 -
8 -
9 -
10 White
11 -
12 -
13 Brown
14 White/brown
15 Orange
16 White/orange
- Black
Signal
Heater gnd
Heater gnd
Heater +24V dc
Heater +24V dc
+24V dc
Gnd
D1-
D1+
D0-
D0+
Shlds
18 Installing the Vehicle Imaging Subsystem
Page 31

VIS-CAM System
3.1.2 Optional Side Mount
1. Attach the pipe clamps approximately 6-inches apart on a vertical mounting surface as
shown in Figure 13.
2. Loosen the four Allen screws and remove the flange from the mounting base. Figure 10,
“Install the traffic light sensor.,” on page 15.
3. Route the Traffic Light Sensor end of the TLS-300 signal and
the power cable through the pipe and flange.
4. Screw the flange onto the pipe somewhat tightly to allow
subsequent minor adjustment
5. Place the pipe in the pipe clamps and tighten them to secure
the pipe to the vertical mounting surface.
6. Attach the Traffic Light Sensor body to the flange and secure
it with the four Allen screws.
7. Orient the Traffic Light Sensor such that the white reflectors
are parallel to the trigger plane with side B facing (visible
from) the trigger plane
8. Route the free end of the cable to the VIS J-Panel in
accordance with local code requirements
9. Connect the color-coded wires to the J-Panel connector X3 as
described in Section 3.3 on page 21. Make sure that no power
is applied when performing any wiring operation.
Figure 13. Pipe clamps should be
about 6-inches apart
on a vertical surface.
3.2 Installing the Camera(s)
In general, the camera(s) should be aimed at the most likely cross-lane position of the vehicle
license plates. See “Installation Preparation” on page 6 for general site layout guidelines. To install
the camera(s):
1. Attach the camera mount to the camera enclosure using the included mounting bolts and washers.
Refer to Figure 14.
Figure 14. Camera Installation
Installing the Vehicle Imaging Subsystem 19
Page 32

VIS-CAM System
2. Align the camera enclosure mounting surface with the hole pattern of the camera mount and
secure it to the camera mount with the five provided ¼-20 hex bolts.
3. Attach the camera, with mount, to the mounting structure. The hole pattern is shown in Figure 15
Below
Figure 15. Camera mount template.
4. Route the camera end of the camera cable according to the camera IAW local electrical code
Requirements
5. The jacket is removed from the cable in the camera end and the wires are stripped as shown in the
Figure 16 below. There are two sets of four twisted pairs. Four of the pairs are for ethernet signals.
These pairs are individually foil shielded and have a common braid shield. The other four pairs are
individually foil shielded without the common braid shield. The shield on the Ethernet pairs must
be run as close to the connector as possible. All wires must be stripped for insulation app. 7mm.
Figure 16. Camera cabling as it appears before electrical installation.
6. The cable is separated into the Ethernet part (with the braid shield) and the power and control
part (the rest). Each part is fastened with cable ties to the respective cable relief’s on the terminal
block X4 on the VIS-CAM I/O Board.
20 Installing the Vehicle Imaging Subsystem
Page 33

VIS-CAM System
r
r
r
r
Figure 17. Cable final wiring.
7. The wires are inserted into X4 as shown in Table 2 and Figure 18. A mounting tool for releasing the
spring enabling insertion of the wire is enclosed together with the connectors. (Mounting the wires
can be eased by separating the terminal block in the middle – just “break” it into two blocks of
eight terminals – and then re-join it when the wires are mounted)
Table 2 Electrical wiring for the VIS CAM installation.
X4 Pin # Wire Color Signal
1 White/orange in Cat5e/6 cable
2 Orange in Cat5e/6 cable
3 White/green in Cat5e/6 cable
4 Green in Cat5e/6 cable
5 White/blue in Cat5e/6 cable
6 Blue in Cat5e/6 cable
7 White/brown in Cat5e/6 cable
8 Brown in Cat5e/6 cable
9 Black Gnd
10 Red +24V dc
11 Black Vinit+
12 Pink Vinit-
13 Black RS485D+
14 Brown RS485D-
15 Black RS485D+
16 Orange RS485D-
Ethernet A+
Ethernet A-
Ethernet B+
Ethernet B-
Ethernet C+
Ethernet C-
Ethernet D+
Ethernet D-
Remarks
not used with VIS CAM
not used with VIS CAM
not used with VIS CAM
not used with VIS CAM
Trigger signal
Trigger signal
Lane Controlle
Lane Controlle
Lane Controlle
Lane Controlle
Installing the Vehicle Imaging Subsystem 21
Page 34

VIS-CAM System
Figure 18. Properly wired X-4 connector.
8. The cable is mounted in the cable entry on the back side of the camera as shown in the Figure 19
below. The rubber bushing is mounted around the jacket and the metal brace is mounted around
the shield securing proper electrical connection from the shield to the metal housing (se figure
Figure 19).
Figure 19. Back of the video camera.
For a detailed description of the VIS CAM 300/400 interface please refer to See “ Appendix A:
Camera Functional and Connector Description” on page 43 in this manual.
22 Installing the Vehicle Imaging Subsystem
Page 35

VIS-CAM System
r
r
r
r
r
r
r
r
3.3 Installing the J-Panel
The J-panel layout is shown in Appendix A, See “Connection requirements.” on page 43. This
Appendix has a detailed description of the J-Panel function and connectors.
3.3.1 X1 and X2 VIS CAM 300/400
The VIS CAM connections to the J-Panel are shown in Table 3 and Figure 20
Table 3 VIS CAM connections to the J-Panel.
X1, X2 Pin # Wire Color Signal
1 White/orange in Cat5e/6 cable
2 Orange in Cat5e/6 cable
3 White/green in Cat5e/6 cable
4 Green in Cat5e/6 cable
5 White/blue in Cat5e/6 cable
6 Blue in Cat5e/6 cable
7 White/brown in Cat5e/6 cable
8 Brown in Cat5e/6 cable
9 Black wire in Red/Black pai
10 Red wire in Red/Black pai
11 White wire in Brown/White pai
12 Brown wire in Brown/White pai
13 White wire in Red/White pai
14 Red wire in Red/White pai
15 White wire in Orange/White pai
16 Orange wire in Orange/White pai
Ethernet A+
Ethernet A-
Ethernet B+
Ethernet B-
Ethernet C+
Ethernet C-
Ethernet D+
Ethernet D-
Gnd
+24V dc
Vinit+
Vinit-
RS485D+
RS485D-
RS485D+
RS485D-
Remarks
not used with VIS CAM
not used with VIS CAM
not used with VIS CAM
not used with VIS CAM
Trigger signal
Trigger signal
Lane Controller
Lane Controller
Lane Controller
Lane Controller
Installing the Vehicle Imaging Subsystem 23
Page 36

VIS-CAM System
Figure 20. VIS CAM connections.
3.3.2 X3, X7 Traffic Light Sensor
The Traffic Light Sensor TLS-300 connection to the J-Panel is shown in Table 4 and Figure 21.
Table 4 TLS 300 to J-Panel connections.
X3 Pin X Signal Description
1 +24V dc Power output
2 Gnd Power return
3 D0+ RS485 databus D0+ White/orange
4 D0- RS485 databus D0- Orange
5 D1+ RS485 databus D1+ White/brown
6 D1- RS485 databus D1- Brown
X7 Pin X
1 Heater +24V dc Power output
2 Heater gnd Power return
Connection to Light Sensor Cable wire color
Yellow
White
Red/blue and Blue/red
White/green and Green
24 Installing the Vehicle Imaging Subsystem
Page 37

VIS-CAM System
Figure 21. TLS 300 to J-Panel wiring.
3.3.3 X6 Power Input Connector
The Power Input connection to the J-Panel is shown in Table 5 and Figure 22.
The maximum power to a J-Panel is:
Camera #0 2.0A
Camera #1 2.0A
Traffic Light Sensor 2.0A
RS485-to-Ethernet conv
0.3A
Total 6.3A
Table 5 Power input to the J-Panel
X6 Pin # Signal Description
1 +24V +24V dc
2 GND
+24V return
Connection to
24V DC power supply + output
24V DC power supply return
Installing the Vehicle Imaging Subsystem 25
Page 38

VIS-CAM System
V-
Figure 22. X-6 Power input connection.
3.3.4 X8 LS RS485 Out Connector
The RS485 output from the Light Sensor to the RS485-to-Ethernet converter connector is X8. The
connections from X8 to the converter are shown in Table 6 and Figure 23
Table 6 X8 to converter connector
X8 Pin # Signal Description
1 +24V dc 24V Power output
2 Gnd Power return
3 +12V dc 12V Power output
4 Gnd Power return
5 D0+ RS485 databus D0+ D+ Port 2
6 D0- RS485 databus D0- D- Port 2
7 D1+ RS485 databus D1+ D+ Port 1
8 D1- RS485 databus D1- D- Port1
Connection to RS485-to-Ethernet converter
V+ power input
power input
26 Installing the Vehicle Imaging Subsystem
Page 39

VIS-CAM System
Figure 23. Wiring for the X8 to converter connector.
Up to four cameras can be connected to one Light Sensor using one Moxa Nport 5232 Device Server.
If more than four cameras need to be connected to the same Light Sensor please refer to “Appendix
E: Moxa N-Port 5232 Configuration” on page 93 in this Manual.
3.3.5 X14 Trigger Input Connector
The Trigger input connection to the J-Panel is connector X14. The connections are listed in Table 7
Table 7 Trigger input connector.
X14 Pin # Signal Description
1 Trig0+ Positive Trigger input to camera 0
2 Trig0- Negative Trigger input to camera 0
3 Trig1+ Positive Trigger input to camera 1
4 Trig1- Negative Trigger input to camera 1
3.3.5 (a) Trigger polarity
The switches S3 and S5 sets the trigger polarity:
If the trigger signal is normally low (no voltage at trigger input) the switch shall be in position
Arrow up - positive going
If the trigger signal is normally high (voltage at trigger input) the switch shall be in position
Connection to
Trigger device positive terminal
Trigger device negative terminal
Trigger device positive terminal
Trigger device negative terminal
Installing the Vehicle Imaging Subsystem 27
Page 40

VIS-CAM System
Arrow down – negative going
As a guideline the two LEDs marked TRIG-0 and TRIG-1 shall be off when no trigger pulse is present.
3.3.5 (b) Test Trigger
Activating switches S1 and S4 generates a trigger pulse for test purposes. Only one trigger pulse is
generated each time the switch is activated.
The duration of the trigger pulse is approximately 4 ms.
The trigger indicator LEDs flash when the test trigger switch is activated.
Figure 24. Test trigger
3.3.6 X15 Lane Controller Connector (X4 and X5)
The Lane Controller connection to the J-Panel is connector X15. The connections are listed in Table
8 .
Table 8 X15 Lane Controller
X15 Pin # Signal Description
1 D0+ RS485 databus D0+
2 D0- RS485 databus D0-
3 Gnd gnd
4 D1+ RS485 databus D1+
5 D1- RS485 databus D1-
It is possible to have one Lane Controller connected to several cameras or one Lane Controller to
each camera:
One Lane Controller for two or more cameras
1. The Lane Controller is connected to the X15 pin 1 and 2 (no connections to pin 4 and 5)
2. Switch S2 position “OPEN”
3. The Lane Controller can be connected to more J-Panels by connecting RJ45 patch cables between
connector X4 and connector X5 on the next J-Panel (and from X4 on the next J-Panel to X5 on the
third J-Panel). Switch S2 on the other J-Panels must also be in the “OPEN” position.
Connection to
Lane Controller databus 0+
Lane Controller databus 0-
gnd
Lane Controller databus 1+
Lane Controller databus 1-
Two Lane Controller to two cameras
1. The Lane Controller for camera 0 is connected to X15 pin 1 and 2
2. The Lane Controller for camera 1 is connected to X15 pin 4 and 5
3. Switch S2 position “TERM”
4. Do not connect any cables to X4 and X5
28 Installing the Vehicle Imaging Subsystem
Page 41

VIS-CAM System
Figure 25. Two lane controller.
3.4 Illumination Options
3.4.1 Installing the TNF-31 Flash
The connection to the Flash unit in the VIS CAM 300 is shown in Table 9 and Figure 26.
Figure 26. TNF-31 flash unit
Table 9 Flash unit connection in VIS CAM 400.
Pin Signal Description Connection to
1 I/O Gnd IO Board Gnd
2 Gnd Flash Gnd Flash ground (negative power terminal)
3 Out Strobe out Strobe input on flash unit
4 Stat Strobe status
5 FPWR Flash power Power from flash to output circuit on I/O Board
6 24V IO board 24V (Fused0.5A) Pin 5 when no power is available from the flash
The cable from the flash unit is connected to the VIS CAM 300 I/O Board as shown in figure 3.17 and
3.18. There are two examples shown: one where the output circuit on the I/O Board is powered
from the flash unit and one where the output circuit is powered from the I/O Board.
It is recommended that I/O Board output circuit be powered from the flash unit in order to obtain
galvanic isolation between the to units. In cases where this is not possible (such as when using mains
supplied flash units) power is taken from the I/O Board.
The cable must be shielded and the shield connected to the metal at the cable entry in the camera
house. The switch labelled S3 on the VIS CAM 300 I/O Board must be in position “NIGHT L” (away
from connector X5 as shown below).
Pin 2 when no power is available from the flash
Status output from flash unit
Installing the Vehicle Imaging Subsystem 29
Page 42

1
Distance in Feet
VIS-CAM System
Table 10 Optimal Illumination Distance Between Camera and TNF
TS-9720EN
3.5 TBD 2
Distance measured from outer wall of Camera housing to outer wall of Flash unit.
Figure 27. S3 switch setting
Figure 28 shows how to connect to an AC powered Flash unit with the I/O Board interface
electronics internally powered by the I/O Board. The Flash AC power connection is not shown.
Figure 28. Connecting an AC flash.
TSC-9720EN TS-2030EN TSC-2030EN TS-2076EN TSC-2076EN TS-1327EN TSC-1327EN
TBD
TBD
TBD TBD
Other Flash connection examples are found in “ Appendix A: Camera Functional and Connector
Description” on page 43.
The VIS CAM 300 has an interface for two flashes. When this option is selected (S3 position “FLASH
2”) and the other flash is connected to connector X6, the two flashes fire alternately. Please refer
to “ Appendix B: J-Panel Functional and Connector Description” on page 67 for details.
3.5 Trigger Options
3.5.1 Installing The Laser Vehicle Detector
The connection from the Laser Vehicle Detector to the VIS CAM 300 is shown in Figure 29 and Table
10
30 Installing the Vehicle Imaging Subsystem
Page 43

VIS-CAM System
r
r
r
-
-
Figure 29. Connection for LVD to VIS CAM 400.
Table 11 Wiring for LVD to VIS CAM 400.
X7 Pin # Signal Description
1 24V (Fused 0.5A)
2 Gnd Power gnd
3 Trigger Trigger from lase
4 RS485- Transmit to lase
5 RS485+ Receive from lase
6 Gnd Communication gnd Communication gnd on laser
7 nc No connection -
8 nc No connection
Power to laser
Connection to
Laser power input
Laser ground
Trigger out on laser
Receive input on laser
Transmit output on laser
The cable must be shielded and the shield connected to the metal at the cable entry in the camera
house.
The switch S3 and/or S5 on the J-panel must be in position “positive going” (pushed towards X1/X2)
to enable the laser trigger input on the IO Board.
Installing the Vehicle Imaging Subsystem 31
Page 44

VIS-CAM System
32 Installing the Vehicle Imaging Subsystem
Page 45

VIS-CAM System
4 System Set-Up
This section provides a generic procedure for aligning one or more VIS CAM 300/400 cameras and
their associated equipment at a site. If you received a specific installation manual from JAI for your
project then follow those instructions instead of the procedure described here.
The example installation process described in this section assumes that:
• The cameras are being mounted on an overhead structure directly over the lane(s) being
observed. The process for aligning a camera mounted at the side of a lane is essentially the
same as aligning a single camera mounted directly over the lane.
• The site employs an accurate vehicle detection device that outputs a discrete TTL signal to the
VIS system whenever the back (or front) of a vehicle crosses a fixed line across the road. This
line is referred to as the “trigger line” in this document. Examples of such triggering devices
are: Peak’s trafficLoop, STI’s Vehicle Detector light curtain, and JAI’s Laser Vehicle Detector.
• License plate reading or vehicle matching is performed on the images produced by the VIS
system. In these cases, precise location and alignment of the cameras is critical to project
success. If the VIS images are only for human interpretation, then achieving the exact camera
alignment is much less critical.
• The installer is familiar with using the ENSetup program supplied by JAI. Please refer to the
ENSetup Program User’s Guide if you are unfamiliar with this software. JAI offers engineering
support and software tools to help select the optimum camera and trigger locations to meet
your specific project needs. Contact ITS Engineering Support at (408) 383-0300 for further
information about obtaining JAI assistance.
4.1 Preparation for Alignment
4.1.1 Pre-Alignment Checklist
• Make sure you have a JAI supplied setup computer with the ENSetup program installed.
• The Setup computer needs to have an Ethernet network adapter installed (preferably 1 Gigabit
Ethernet Adapter) and the TCP/IP network configured with the correct IP-address, subnet-mask
and default-gateway.
• The Setup computer and the cameras need to be on the same subnet. The cameras are shipped
with the standard IP-address “10.0.0.65” and subnet-address “255.255.255.0”, and the Setup
computer needs to be assigned an IP-address “10.0.0.xx” in order to automatically discover the
cameras using the ENSetup program (NB! “xx” must not be “65”).
• All cameras have to be given unique IP-addresses before the alignment begins. This is done using
the ENSetup application.
• Confirm all VIS CAM components and cables are properly connected.
System Set-Up 33
Page 46

VIS-CAM System
4.1.2 Select a Suitable Vehicle, License Plate, and Plate Stand for the Setup
To accurately set up the Vehicle Imaging Subsystem, the system installers need access to:
1. A vehicle that can be temporarily parked on the road
2. A plate that is:
a. typical in size and color for the site
b. clean, flat and in “like new” condition
3. An adjustable plate stand that allows the plate to be mounted in a vertical plane, at various
heights above the road, and at variable roll angles. The stand must allow the plate to be placed
at both the nominal plate height and the minimum expected plate height. The stand must also
allow the plate to be rolled at least + or – 10 degrees from horizontal but held firmly in place
once a specific roll angle is selected. The stand should be heavy enough so that the wind will not
blow it over or move it.
Table 12 Typical minimum plate heights and nominal plate heights:
Plate Height Front of Vehicle
minimum (bottom edge) 8in or 20cm
nominal (middle) 16in or 40cm
Back of Vehicle
15in or 38cm
24in or 60cm
4.1.3 Select the Camera to Align
• If the site employs a single camera per lane, then you can choose any lane to start the
alignment procedure.
• If the site employs multiple cameras regularly spaced across a roadway to provide continuous
fieldof- view coverage from edge to edge, select one of the cameras at either edge of the
roadway to be the first camera to align.
• Align all remaining cameras in order from the first camera aligned to the last camera at the
other side of the roadway. The next camera aligned is always the one adjacent to the camera
most recently aligned.
4.1.4 Validate the Installation Geometry
The VIS cameras and vehicle trigger line should have been installed at the locations agreed to by
you and JAI. Typically JAI utilizes a specially developed Excel worksheet to confirm the suitability of
the equipment placement at the site from an image processing perspective. See Figure for an
example worksheet. However, equipment is often not located where the worksheet specifies. It is
therefore imperative that the actual equipment layout at any given site be measured to verify that
the cameras and trigger are located at the desired locations relative to each other. If necessary,
move the camera/trigger positions until the distances required in the worksheet are met. If it is not
possible to move the equipment to the required locations, then the impact of any changes to the
subsequent image processing must be assessed. Enter the actual camera locations into the Input
section of the JAI worksheet and then note the changes in the Results section. If there are any
questions about the suitability of a specific camera/trigger layout, contact your JAI representative
for advice.
4.1.5 Edit the alignment settings on the Setup Computer
In order to carry out the alignment properly, the ENSetup program has to be configured with two
values from the worksheet. See the ENSetup Program User’s Guide (Video Window Setup section) for
details on changing Video Window properties.
Using the ENSetup program, make sure the “tilt line” and “plate num cols” items on your Portable
Setup computer are exactly the same as the measurements, including the proper plate size
parameters measured in Section 4.1.4, “Validate the Installation Geometry,” on page 32. All other
34 System Set-Up
Page 47

VIS-CAM System
camera settings should already be correct for the site installation, but it is a good idea to verify that
this is true before proceeding. The Setup Computer is now properly configured to support lens
adjustments and camera aiming.
4.1.6 Connect the Setup Computer to the Camera
• Position the Setup Computer next to the camera being aligned. If the alignment is conducted in
bright sunlight, shield the monitor screen with a hood to make it visible. Make sure that no
portion of the computer or cables interfere with the camera’s view of the road.
• Connect the Setup Computer’s network adapter with the camera network. This can be done
directly to the I/O boards X1 and X3 connectors or using a local Ethernet switch. It is preferable
to use a local Ethernet switch instead of a local direct connection to the I/O board. A direct
connection between the Setup computer and the camera will disconnect the camera from the
site LAN and thereby disconnect the light sensor as well.
Figure 30. Example of a network connection using a local switch.
The network connection between the Setup computer and the camera can be established using a
local switch. Two separate ports of the Ethernet Switch are connected directly to the I/O board
connectors X1 and X3. The Setup computer is then also connected to one of the free ports on the
switch. If the switch is running on 24V dc, the I/O board is capable of supplying up to 0.5A on
connector X15 located next to X1 and X3. The pin marked with #1 on X15 is +24V dc.
System Set-Up 35
Page 48

VIS-CAM System
4.1.7 Drive and Park the Setup Vehicle Correctly
• Drive the setup vehicle slowly towards the trigger line through the center of the cameras field
of view in the same manner (heading) as a typical driver would occupy this lane.
Note: This is important, make sure that the vehicle is driven exactly the same way as the average
driver would through the section of roadway being viewed by the camera.
• Stop the vehicle approximately one foot (0.3 meter) past the trigger line. Make sure that the
vehicle is parked aimed in the same direction as the average driver would point their car if they
were driving through this section of roadway.
• To help the driver of the vehicle properly aim the car while driving, instruct him (or her) to
always look forward down the road as they would normally. Use a sound to signal the driver
when to stop.
4.1.8 Properly Position the License Plate Stand
Using your portable plate stand, position a license plate:
• at the minimum expected trigger distance from the camera.
• at the minimum expected plate height above the road.
• at the location along the trigger line where the center of the horizontal field-of-view of this
camera is desired.
Rotate the plate on the stand until the top and bottom edges are level with the vehicle parked
behind the trigger line (to within a + or – a couple of degrees). Secure the plate on the plate stand
so that the adjustments you have just made do not change.
4.1.9 Perform Initial Lens Adjustment and Camera Aiming
1. Back away all of the thumbscrews on the lens holder until they do not touch the knurled
adjustment rings on the lens.
2. Make sure the lens aperture adjustment is fully open (rotate the third ring from the front of the
lens fully counter-clockwise until it stops at the f1.2 setting). Secure the thumbscrew that lines
up with the aperture ring until it just presses against the ring. Next tighten the thumbscrew that
lines up with the knurled ring closest to the camera body until it just presses against the lens. Do
not tighten any Lens Holder thumbscrews beyond a slight pressure against the lens.
3. Loosen the roll, pan, and tilt bolts on the JAI camera mounting head until each axis can be easily
adjusted by hand but any particular setting will stay in place after you let go.
4. Power on the Setup computer and then start the ENSetup program. Press the “Video Window”
button to open the Video Window and then select the camera for adjustment from the tree-view
on the left side of the window. Press the “Live” button in the toolbar to start the video
streaming. Press the “Tilt Line” button to show the alignment guidelines. The “Tilt Line” can be
moved using the mouse, or if the “Tilt Line” is selected, using the arrow-keys.
5. Interactively adjust the roll, pan, and tilt of the camera mount and the lens zoom and focus
rings:
6. Adjust the lens focus ring (and camera pan and tilt as necessary) to obtain a focused image of the
plate on the plate stand. If at any time you cannot fully focus the plate because the focus ring on
the lens has reached the end of its turning movement, perform the back-focus procedure
described in the JAI document titled “Zoom Lens Back-Focus Procedure.”
36 System Set-Up
Page 49

VIS-CAM System
7. Adjust the lens zoom ring to obtain a plate width approximately equal to the distance between
the short vertical sizing marks that appear above the tilt line. Readjust focus as necessary. See
Figure 31 for more information.
Figure 31. Initial Camera Alignment Display example.
8. Turn on the “Roll Bar” display on the Setup computer and then roll the camera mount until the
horizontal bumper and trunk seams on the vehicle appear perfectly level with the horizontal line
of the display. Use one 7/16" closed-end wrench on the roll gear to fine-tune the roll angle. Hold
the roll position with the wrench while you use a second wrench to gently tighten the other roll
bolts. Then apply both wrenches to corresponding bolts on opposite sides of the mount. Twisting
in opposite directions to fully secure all of the roll bolts. This approach prevents the roll
adjustment from changing while you tighten the bolts. See Figure 32.
System Set-Up 37
Page 50

VIS-CAM System
Figure 32. Roll Bar Display example.
Pan the camera mount until the plate stand is centered under the default position of the vertical
line in the middle of the “Roll Bar” display. Securely tighten the pan bolt. Be careful not to change
the pan of the camera while you tighten the bolt. Oppositely twisting two 9/16" closed-end
wrenches is recommended (one for the bolt head and one for the nut) to help prevent the pan from
moving while you tighten the bolt.
Switch back to the “Tilt Line” display. Tilt the camera mount until the plate is positioned just above
the tilt line. Re-adjust the zoom as necessary until the plate just fits in between the zoom markers
on the “Tilt Line”. Changing zoom usually requires that the tilt adjustment be modified also. Do not
tighten the Tilt bolts until after the final lens adjustment. See Figure 33.
38 System Set-Up
Page 51

VIS-CAM System
Figure 33. Readjustment of camera tilt and zoom display.
The camera mount and lens are now ready for final adjustment.
4.1.10 Finalize Lens Adjustments and Camera Aiming
4.1.10 (a) Reposition the License Plate Stand at the Nominal Trigger Line
Use your portable plate stand to position the license plate:
1. at the normally expected (nominal) trigger distance from the camera.
2. at the nominal plate height above the road.
3. at the location along the trigger line where the center of the horizontal field-of-view of this
camera is desired.
Rotate the plate on the stand until the top and bottom edges are perfectly level with the vehicle
parked behind the trigger line. Secure the plate on the plate stand so that the adjustments you have
just made do not change.
4.1.10 (b) Perform Final Camera Mount and Lens Adjustments
The final focus adjustment is facilitated using the “Focus Bar” display on the Video Window. Press
the “Focus Bar” button on the toolbar. This displays a “Focus Bar” marker on the Video Window that
will open a separate “Focus Bar” window where the pixel-values taken from the focus bar marker is
displayed. The “Focus Bar” marker cam be moved with the mouse pointer, or if the “Focus Bar”
marker is selected, using the arrow-keys.
1. Position the “Focus Bar” marker directly over the license plate.
System Set-Up 39
Page 52

VIS-CAM System
Figure 34. Focus Bar marker display.
2. Adjust the lens zoom ring until the plate width just barely fits in between the short vertical zoom
markers on the display.
3. Have your assistant tape the lens front-focus chart to the stand so that it appears in-between the
zoom markers. Make sure the black and white bars are vertical in the image.
4. Carefully adjust the lens focus ring until the focus bar waveform display is maximized in
amplitude spread. The “Focus percentage” display shown on the left side of the “Focus Bar
Waveform” window should then be maximized when the picture has got the best focus. If
necessary, readjust the zoom and focus until the width of the plate is just inside the zoom
markers and the waveform spread of the bars is maximized.
40 System Set-Up
Page 53
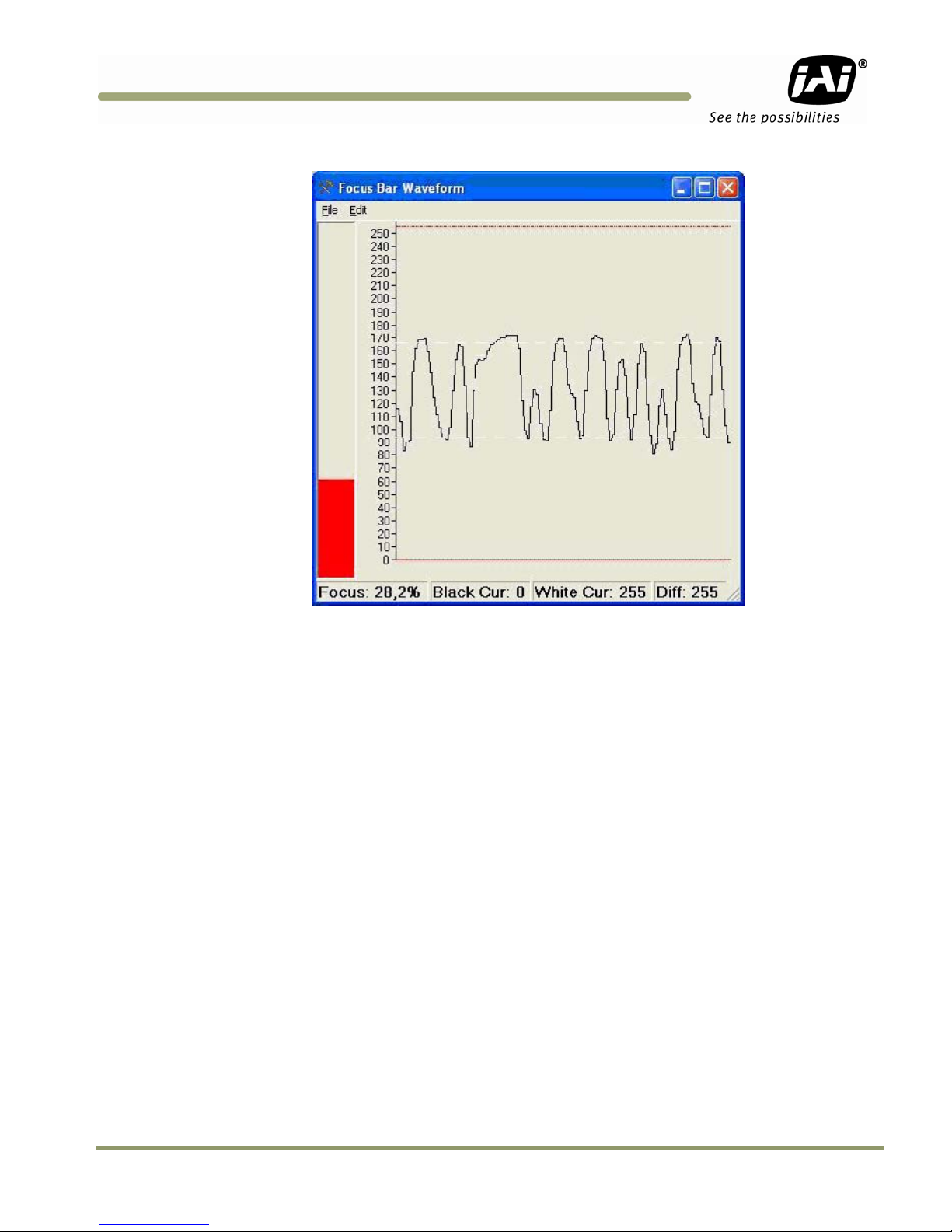
VIS-CAM System
Figure 35. Focus Bar Waveform display.
5. Gently snug the zoom and focus lens holder thumbscrews against the lens without changing any of
the lens settings.
6. Uncover the license plate by removing the lens focus chart.
7. Use the mouse to move the waveform cursors to the top and bottom of the waveform amplitude
variation. The “Black Cursor” is located at the bottom of the waveform display, and the “White
Cursor” is located on the top of the waveform display.
8. Verify that the waveform amplitude variation (for characters in both direct light and shadow, if
possible) is at least 25 and that no portion of the waveform fully saturates either black or white.
System Set-Up 41
Page 54

VIS-CAM System
Figure 36. Focus Bar Waveform Display with waveform cursors.
9. Use one hand to carefully hold the focus ring of the lens in place while you rotate the filter ring
on the very front of the lens with your other hand. Turn the filter ring until the white mark on the
ring is oriented straight up (or down). Secure the filter ring in place with a small dab of RTV glue.
10. Printout the image of the screen using the “File -> Print…” menus on both the “Video Window”
and the “Focus Bar Waveform” windows to document the settings. If no printers are connected,
the “PDFCreator” printer driver can be used to save the pictures as PDF-files.
11. Have your assistant move the plate stand back to the near trigger line and re-position the plate
at the minimum plate height.
12. Drive the setup vehicle slowly towards the trigger line in the same heading as normal traffic
flow and center it directly between the camera being aligned and the adjacent camera that has
already been aligned. Marking the position halfway between adjacent cameras at the trigger line
with some marker is advisable to help the driver properly aim the vehicle.
13. Park the vehicle at the location where it just barely causes the trigger to cause an image to be
captured. For loop triggers, park the vehicle where a vehicle would normally be located when the
loop trigger signals the VIS to capture an image.
4.1.11 Flash Head Alignment
The following section provides a general procedure to align the VIS flash head. Be sure to follow any
specific alignment procedure provided with your system.
Align the flash head at night and after aligning the cameras. Park a light colored vehicle underneath
the camera and where the vehicle detector triggers the camera.
42 System Set-Up
Page 55

VIS-CAM System
1
Distance in Feet
• Press the “Repetitive Trigger” button on the ENSetup toolbar. This will trigger the camera every
second. Make sure that the “Ethernet” external hardware trigger is enabled in the “Camera
Properties” section “2 – Trigger”, property “External Trigger Source”.
• Adjust the flash head tilt and pan control until the entire back of the vehicle is well illuminated.
If necessary, adjust the flash-head pan control to center the flash beam over the vehicle.
• If the flash illumination is too bright for your installation, contact JAI for instructions on how to
adapt VIS system parameters to reduce sensitivity to nighttime illumination.
Repeat pressing the “Repetitive Trigger” button on the ENSetup toolbar to stop flash firing. Repeat
the above steps for each camera/flash.
Table 13 Optimal Illumination Distance Between Camera and TNF
TS-9720EN
3.5 TBD 2
Distance measured from outer wall of Camera housing to outer wall of Flash unit.
TSC-9720EN TS-2030EN TSC-2030EN TS-2076EN TSC-2076EN TS-1327EN TSC-1327EN
TBD
TBD
TBD TBD
System Set-Up 43
Page 56

VIS-CAM System
44 System Set-Up
Page 57

VIS-CAM System
5 Appendix A: Camera Functional and Connector Description
The camera has connections to the EN J-Panel, Light sensor, Flash, Night Light and Laser Vehicle
Detector as shown in the system overview Figure 37.
Appendix A describes the camera connectors for these units, the signal specifications, output
circuits and test facilities. It also covers cable requirements.
Figure 37. Connection requirements.
Appendix A: Camera Functional & Connector Description 45
Page 58

5.1 I/O Board Layout
Connections to the camera are made through the EN I/O Board located in the back of the camera
housing. Figure 38 shows the board layout.
Figure 38. Component layout of the EN board.
VIS-CAM System
46 Appendix A: Camera Functional & Connector Description
Page 59

VIS-CAM System
5.2 X4: I/O Board Connection to J-panel
Figure 39. Board connections
5.2.1 Functionality
Power and data connection to the camera. The 24V power supply for all camera functions (Camera,
I/O Board, light and heaters), Ethernet and RS485 data communication is connected using this
connector.
5.2.2 Connector specification
Connector type: 16 pole WAGO pluggable terminal block
Connector on board: WAGO 734-246
Cable part: WAGO 734-216
5.2.3 Connector signal specifications
5.2.3 (a) Lane Controller interface
Description
RS485 two wire half-duplex multi-drop communication network. The I/O Board has connections that
allow for daisy chain configuration. The two signal pairs (RS485D+ and RS485D-) can be reversed.
The signal is terminated on the J-Panel.
Signal levels:
Standard RS485 communication levels. Common mode range –7 to +12V.
Appendix A: Camera Functional & Connector Description 47
Page 60

VIS-CAM System
Electrical interface on the I/O board:
Figure 40. Interface drawing .
5.2.3 (b) Trigger input
Description
The trigger input is balanced and the input circuit is a RS485 receiver.
Signal levels
The signal levels are standard RS485 signals. The specification below is taken from Linear
Technologies datasheet for LTC1480:
The common mode range is –7 to +12V.
5.2.4 Electrical interface on the I/O board:
Figure 41. Electrical interface
48 Appendix A: Camera Functional & Connector Description
Page 61

VIS-CAM System
r
r
r
r
r
r
r
r
r
r
r
r
5.2.4 (a) Ethernet Interface
Description: 100 Mb Ethernet interface. The signal must be connected to a gigabit Ethernet switch
for best performance. The cable must be a Cat 5e or preferably a Cat 6 cable. The wire color
marking on the PCB is standard Ethernet wire colors.
5.2.4 (b) Power input
Voltage 24VDC±20%
Current 0.3A with heaters and LED light off
Max current inrush app 2.5A
Heaters on 1.3A totally
5.2.5 Connector physical Interface
Figure 42. Physical interface table.
Pin Signal Description
1 Ethernet A+ Ethernet signal to gigabit switch
2 Ethernet A- Ethernet signal to gigabit switch
3 Ethernet B+ Ethernet signal to gigabit switch
4 Ethernet B- Ethernet signal to gigabit switch
5 Ethernet C+ Ethernet signal to gigabit switch Pin 5
6 Ethernet C- Ethernet signal to gigabit switch Pin 6
7 Ethernet D+ Ethernet signal to gigabit switch Pin 7
8 Ethernet D- Ethernet signal to gigabit switch Pin 8
9 Gnd Power ground Pin 9
10 +24V dc Supply voltage Pin 10
11 Vinit + Balanced trigger pulse positive
12 Vinit - Balance tripper pulse negative
13 RS485D+ RS485 Data+ for Lane Controlle
14 RS485D- RS485 Data- for Lane Controlle
15 RS485D= RS485 Data+ for Lane Controlle
16 RS485D- RS485 Data- for Lane Controlle
Connection to
J-Panel X1
or X2
pin 1
Pin 2
Pin 3
Pin 4
Pin 11
Pin 12
Pin 13
Pin 14
Pin 15
Pin 16
Remarks
Cat5e/6 cable white/orange
Cat5e/6 cable orange
Cat5e/6 cable white/green
Cat5e/6 cable green
Cat5e/6 cable white/blue
not used with VIS CAM
Cat5e/6 cable blue
not used with VIS CAM
Cat5e/6 cable white/brown
not used with VIS CAM
Cat5e/6 cable brown
not used with VIS CAM
Black wire in Red/Black pai
Red wire in Red/Black pai
White wire in Brown/White pai
Brown wire in Brown/White pai
White wire in Red/White pai
Red wire in Red/White pai
White wire in Orange/White pai
Orange wire in Orange/White pai
Appendix A: Camera Functional & Connector Description 49
Page 62

VIS-CAM System
5.2.6 Typical wiring diagram.
Figure 43. Category 5 or 6 wiring diagram.
5.3 I/O Board Flash Connection
Figure 44. Flash connections.
5.3.1 Functionality
Output to flash unit. This output is used when only one flash unit is connected. The output is
galvanically isolated using an optocoupler. The isolated part of the electronics on the board can be
powered from the flash unit or from the I/O Board using a 24V DC output on the connector.
5.3.2 Connector specification
Connector type: 6 pole WAGO pluggable terminal block
Connector on board: WAGO 734-236
Cable part: WAGO 734-206
50 Appendix A: Camera Functional & Connector Description
Page 63

VIS-CAM System
5.3.3 Connector signal specifications
Description
Logic inverter powered by 5V drives the output. The inverter is a HCMOS type 74AHC14.
Output signal specification
Signal amplitude 5V TTL
Output impedance 100 Ω
Pulse width 5 ms ± 1 ms
Signal polarity active high
External power requirement
Voltage 8-26V DC
Current max 25μA
Electrical Interface on the I/O board:
Figure 45. I/O board electrical interface. Test
A push button switch S1 can be activated for generation of an output pulse for test purposes. The
flash output is high as long as the switch is activated. The switch is located as shown on Figure 46:
Figure 46. Switch location.
5.3.4 Connector physical Interface
Table 14 Wiring diagram.
Pin Signal Description Connection to
1 I/O Gnd IO Board Gnd
2 GND Flash Gnd Flash ground (negative power terminal)
3 Out Strobe Out Strobe input on flash unit
4 Stat Strobe status
5 FPWR Flash power Power from flash to output circuit on I/O Board
6 24V IO board 24V (Fused 0.5A) Pin 5 when no power is available from the flash
Pin 2 when no power is available from the flash
Status output from flash unit
Appendix A: Camera Functional & Connector Description 51
Page 64

VIS-CAM System
5.3.5 Typical Wiring Diagram
Figure 47 shows how to connect to the DC Flash unit having the I/O Board electronics powered from
the Flash Power Supply.
Figure 47. Connecting DC Flash to a board powered from the Flash power supply.
Figure 48 shows how to connect to the DC Flash unit with the I/O Board electronics internally
powered.
Figure 48. Connection DC Flash to an internally powered board.
Figure 49 shows how to connect to the AC Flash unit. Flash Power connections not shown.
52 Appendix A: Camera Functional & Connector Description
Page 65

VIS-CAM System
Figure 49. AC flash unit connection.
5.3.6 X6: I/O Board Night Light/2nd Flash Connection
Figure 50. Second flash connection.
5.3.7 Functionality
Output to Night Light or second Flash unit.
When switch S3 is positioned as shown in Figure 50 (to the right), X6 outputs the night light control
signal. When S3 is pushed to the left, X6 outputs the signal for a second flash unit. In this mode the
strobe signal is fed alternately to X5 and X6.
The output is galvanically isolated using an optocoupler. The isolated part of the electronics on the
board is powered from the Night Light or Flash unit. If no power is available from the unit’s power,
it can be taken from X5.
Appendix A: Camera Functional & Connector Description 53
Page 66

VIS-CAM System
5.3.8 Connector specification
Connector type: 4 pole WAGO pluggable terminal block
Connector on board: WAGO 734-234
Cable part: WAGO 734-204
5.3.9 Connector signal specifications
Description
A 5V logic inverter drives the output. The inverter is a HCMOS type 74AHC14.
Output signal specification:
Signal amplitude 5V TTL
Output impedance 100 Ω
Pulse width 5 ms ± 1 ms
Signal polarity active high
External power requirement
Voltage 8-26Vdc
Current max 25mA
Electrical interface on the I/O board:
Figure 51. IO board electrical interface.
Test
A push button switch S2 can be activated to generate an output pulse for test purposes. The
light/flash 2 output is high as long as the switch is activated. The switch is located as shown on
Figure 51:
54 Appendix A: Camera Functional & Connector Description
Page 67

VIS-CAM System
5.3.9 (a) Connector physical Interface
Table 15 Physical interface pinouts.
Pin Signal Description Connection to
1 Gnd Light/Flash Gnd Light/Flash ground (negative power terminal)
2 Out Light control/Strobe out Light control input or strobe input on flash unit
3 Stat Light/Strobe status Light/Flash Status output from unit
4 FPWR Light/Flash power Power from Light/Flash unit to output circuit on I/O Board
The Gnd signal on pin 1 is connected to the Gnd signal on X5 (pin 2) internally on the board.
5.3.10 Typical Wiring Diagram
Figure 52 shows how to connect to the 2nd DC Flash unit having the I/O Board electronics powered
from the Flash Power Supply.
Figure 52. Wiring a second DC flash from the flash power supply.
Appendix A: Camera Functional & Connector Description 55
Page 68

VIS-CAM System
Figure 53. Connecting to a 2nd DC Flash unit with the I/O Board electronics internally
powered..
Figure 54 shows how to connect to the 2nd AC Flash unit. Flash Mains power not shown.
Figure 54. Connecting the second AC flash.
56 Appendix A: Camera Functional & Connector Description
Page 69

VIS-CAM System
5.4 Night Light TNC 100 Connection
Figure 55. Connecting to the night light (TNC 100)
5.5 X7:I/O Board Laser Vehicle Detector Connection
Figure 56. Detection board
Appendix A: Camera Functional & Connector Description 57
Page 70

VIS-CAM System
5.5.1 Functionality
Connection to the Laser Vehicle Detector (LVD).
5.5.2 Connector specification
Connector type: 8 pole WAGO pluggable terminal block
Connector on board: WAGO 734-238
Cable part: WAGO 734-208
5.5.3 Connector signal specifications
5.5.3 (a) Power Output
Voltage 24V DC
Fuse 0.5A (PTC fuse, self resetable)
5.5.3 (b) Trigger Input
The LVD trigger input is shown in Figure 57. The input specification is
Input impedance 10k pull-up
Signal level 3.3V logic
Figure 57. LVD Trigger Input
5.5.3 (c) Communication
The communication with the Laser Vehicle Detector is RS485 signal levels.
Figure 58. Electrical interface on the I/O board:
58 Appendix A: Camera Functional & Connector Description
Page 71

VIS-CAM System
r
r
r
--
--
5.5.4 Connector physical Interface
Table 16 Connector table
Pin Signal Description
1 24V (Fused 0.5A) Power to laser
2 Tnd Power gnd
3 Trigger
4 RS485- Communication interface
5 RS485+
6 Gnd Communication gnd
7 NC No connection
8 NC No connection
Trigger from lase
Communication interface
5.6 X1, X3: I/O Board Ethernet Test Connectors
Figure 59. Ethernet test connectors.
Connection to
Laser power input
Laser groundd
Trigger out on laser
RS-485- on lase
RS-485+ on lase
Communication gnd on laser
5.6.1 Functionality
Connection to Ethernet switch for test purposes. The connectors have integral switches that
disconnect the signal path from the camera to the X2 connector when plugs are inserted and it is
therefore important always to insert plugs in both connectors when testing.
5.6.2 Connector specification
Connector types: 8 pole RJ45 with integral switches
Connector on board: Kinsun ST3009F-880
Cable part: Standard RJ45 plug
5.6.3 Connector signal specifications
Standard Ethernet signals.
Appendix A: Camera Functional & Connector Description 59
Page 72

VIS-CAM System
—
—
—
—
5.6.4 Connector physical Interface
Ethernet test connections.
Pin Signal Description
1 A+ (wh/org) Ethernet A+
2 A- (org) Ethernet A-
3 B+ (wht/grn) Ethernet B+
4 Nu (wht/blu) Not used —
5 Nu (blu) Not used —
6 B- (grn) Ethernet B-
7 Nu (wht/brn) Not used —
8 Nu (brn) Not used —
Connection to
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Remarks
Connected when testing
Connected when testing
Connected when testing
Connected when testing
5.6.5 Test setup 1
The test setup for communication with the EN Camera and the network is shown in Figure 60. The
patch cables can be twisted or not twisted.
Figure 60. EN network test configuration setup.
The test setup does not work properly with a gigabit ethernet switch.
60 Appendix A: Camera Functional & Connector Description
Page 73

VIS-CAM System
The following 100Mb Ethernet switch has been tested successfully:
Phoenix Contact type FL Switch SF 8TX (JAI Inc. no. 2900.00.255)
5.6.6 Test setup 2
The test setup for communication only with the EN Camera is shown in Figure 61. The patch cable
must be twisted.
The patch cable to the PC is plugged into connector X3. A dummy cable (or plug) is plugged into
connector X1.
Figure 61. Test setup 2.
Appendix A: Camera Functional & Connector Description 61
Page 74

VIS-CAM System
5.7 X15: I/O Board Auxiliary power connector
Figure 62. Auxiliary power connector
5.7.1 Functionality
Power outlet for auxiliary equipment.
5.7.2 Connector physical Interface
Connector: 2 pole WAGO pluggable terminal block
PCB part: WAGO 734-232
Cable part: WAGO 734-202
5.8 Cables
In order to comply with EMC regulations the cable must be shielded and the wires must be twisted
pairs. The cable used for the Ethernet signals must be minimum Cat 5e and preferably Cat 6. The
wires used for power must be a minimum 0.5 mm2.
5.8.1 Cable Specifications
5.8.1 (a) Ethernet:
Category Cat 5e or preferably Cat 6
Characteristic impedance 100 Ω
Number of twisted pairs 4
Maximum cable diameter 15 mm
Maximum cable length 100 meters
5.8.1 (b) RS485 and power:
Characteristic impedance 120 Ω
Number of twisted pairs 4
Wire dimension ≥ 0.5mm
Maximum cable diameter 15 mm
Maximum cable length 100 meters
Connector pin # Signal
1 +24V (fused 0.5A) (self resetable)
2 Gnd
2
62 Appendix A: Camera Functional & Connector Description
Page 75

VIS-CAM System
5.8.1 (c) Combined cable (Ethernet, RS485 and power):
Number of twisted pairs 8
Maximum cable diameter 15 mm
Maximum cable length 100 meters
5.8.2 Recommended Cables
Ethernet: Cable, Cat 6 S-FTP 4x2xAWG24 JAI No. 2900.00.262
Power and RS485: Cable Twisted Pair 4x2x0.5mm2 JAI No. 2900.00.267
Combined cable Cat 6, RS485 and power: JAI No. 2900.00.268
5.8.3 Mounting the cables
Please refer to Section 3 on page 15 of this manual.
Appendix A: Camera Functional & Connector Description 63
Page 76

VIS-CAM System
64 Appendix A: Camera Functional & Connector Description
Page 77

VIS-CAM System
6 Appendix B: J-Panel Functional and Connector Description
6.1 J-Panel Layout
Figure 63. EN-CAM component layout.
6.2 X1: J-panel connection to Camera 0
Figure 64. Connecting from J-Panel to camera zero.
Appendix B: J-Panel Functional & Connector Description 65
Page 78

VIS-CAM System
6.2.1 Functionality
Power and data connection to the EN camera. The 24V power supply for all camera functions
(Camera, I/O Board, light and heaters), Ethernet and RS485 data communication is connected by
means of this connector.
6.2.2 Connector specification
Connector type: 16 pole WAGO pluggable terminal block
Connector on board: WAGO 734-246
Cable part: WAGO 734-216
6.2.3 Connector signal specifications
6.2.3 (a) Lane Controller interface
Description
RS485 two wire half-duplex multi-drop communication network. The I/O Board has connections for
daisy chain configuration. The two signal pairs (RS485D+ and RS485D-) can be reversed.
Signal levels:
Standard RS485 communication levels. Electrical interface on the J-Panel: The signals are connected
to J-Panel X15 pin 1 and 2. There are termination resistors on the board. See Figure 49 on page 53
for a description of the signal path.
6.2.3 (b) Trigger output
Description
The trigger output is balanced and the driver is a RS485 transmitter (LTC1480).
Signal levels
The signal levels are at standard RS485 levels. The specification below is taken from Linear
Technologies datasheet for LTC1480:
Table 17 Signal parameters and conditions.
Electrical interface on the J-Panel:
Figure 65. J-Panel electrical interface
66 Appendix B: J-Panel Functional & Connector Description
Page 79

VIS-CAM System
r
r
r
r
r
r
r
r
r
r
r
r
6.2.3 (c) Ethernet Interface
100 Mb Ethernet interface. The signals are routed directly to RJ45 connector X11. The cable to the
camera must be a Cat 5e or preferably a Cat 6 cable. The wire color marking on the PCB uses
standard Ethernet wire colors.
6.2.3 (d) Power output
Voltage 24VDC from power supply connected to X6 or X7
Current 2A fused
6.2.4 Connector physical Interface
Table 18 Physical interface table
Pin Signal Description
1 Ethernet A+ Ethernet signal to gigabit switch
2 Ethernet A- Ethernet signal to gigabit switch
3 Ethernet B+ Ethernet signal to gigabit switch
4 Ethernet B- Ethernet signal to gigabit switch
5 Ethernet C+ Ethernet signal to gigabit switch
6 Ethernet C- Ethernet signal to gigabit switch
7 Ethernet D+ Ethernet signal to gigabit switch
8 Ethernet D- Ethernet signal to gigabit switch
9 Gnd Power ground Pin 9
10 +24V dc Supply voltage Pin 10
11 Vinit + Balanced trigger pulse positive
12 Vinit - Balance tripper pulse negative
13 RS485D+ RS485 Data+ for Lane Controlle
14 RS485D- RS485 Data- for Lane Controlle
15 RS485D= RS485 Data+ for Lane Controlle
16 RS485D- RS485 Data- for Lane Controlle
Connection to
I/O Board X4
pin 1
Pin 2
Pin 3
Pin 4
Pin 5
Pin 6
Pin 7
Pin 8
Pin 11
Pin 12
Pin 13
Pin 14
Pin 15
Pin 16
Remarks
Cat5e/6 cable white/orange
Cat5e/6 cable orange
Cat5e/6 cable white/green
Cat5e/6 cable green
Cat5e/6 cable white/blue
Cat5e/6 cable blue
Cat5e/6 cable white/brown
Cat5e/6 cable brown
Black wire in Red/Black pai
Red wire in Red/Black pai
White wire in Brown/White pai
Brown wire in Brown/White pai
White wire in Red/White pai
Red wire in Red/White pai
White wire in Orange/White pai
Orange wire in Orange/White pai
Appendix B: J-Panel Functional & Connector Description 67
Page 80

VIS-CAM System
6.2.5 Typical Wiring diagram
Figure 66. Ethernet wiring diagram.
6.2.6 Indicators
There are two LED indicators mounted by the connector:
Table 19 LED indicators
LED label LED color Indication
Trig-0 Green Indicates generation of trigger pulse to camera
Off No trigger pulse
LC DATA LED not mounted
Power Green 24V present at connector pin 10
red No 24V at connector pin 10
6.2.7 Switches
There are two switches located at the connector:
Table 20 Switch labels
Switch label Switch color
S4 TRIG CAM-0 Push bottom
S3 TRIG POLARITY Slide Selects trigger polarity
Function
Generates a trigger pulse to the camera
68 Appendix B: J-Panel Functional & Connector Description
Page 81

VIS-CAM System
6.3 X2: J-panel connection to Camera 1
Figure 67. Board and camera J-panel connection to camera 1.
6.3.1 Functionality
Power and data connection to the EN camera. The 24V power supply for all camera functions
(Camera, I/O Board, light and heaters), Ethernet and RS485 data communication is connected by
means of this connector.
6.3.2 Connector specification
Connector type: 16 pole WAGO pluggable terminal block
Connector on board: WAGO 734-246
Cable part: WAGO 734-216
6.3.3 Connector signal specifications
6.3.3 (a) Lane Controller interface
Description
RS485 two wire half-duplex multi-drop communication network. The I/O Board has connections for
daisy chain configuration. The two signal pairs (RS485D+ and RS485D-) can be reversed.
Signal levels:
Standard RS485 communication levels.
Electrical interface on the J-Panel:
The signals are connected to J-Panel X15 pin 4 and 5. There are termination resistors on the board.
See Figure 49 on page 53 for a description of the signal path.
6.3.3 (b) Trigger output
Description
The trigger output is balanced and the driver is a RS485 transmitter (LTC1480).
Signal levels
The signals are standard RS485 levels. The specification below is taken from Linear Technologies
datasheet for LTC1480:
Appendix B: J-Panel Functional & Connector Description 69
Page 82

VIS-CAM System
Table 21 Signal table
Electrical interface on the J-Panel:
Figure 68. J-panel electrical interface
6.3.3 (c) Ethernet Interface
100 Mb Ethernet interface. The signals are routed directly to RJ45 connector X12. The cable to the
camera must be a Cat 5e or preferably a Cat 6 cable. The wire color marking on the PCB uses
standard Ethernet wire colors.
6.3.3 (d) Power output
Voltage: 24VDC from power supply connected to X6 or X7
Current: 2A fused
70 Appendix B: J-Panel Functional & Connector Description
Page 83

VIS-CAM System
r
r
r
r
r
r
r
r
r
r
r
r
6.3.4 Connector physical Interface
Table 22 Ethernet physical connections
Pin Signal Description
1 Ethernet A+ Ethernet signal to gigabit switch
2 Ethernet A- Ethernet signal to gigabit switch
3 Ethernet B+ Ethernet signal to gigabit switch
4 Ethernet B- Ethernet signal to gigabit switch
5 Ethernet C+ Ethernet signal to gigabit switch
6 Ethernet C- Ethernet signal to gigabit switch
7 Ethernet D+ Ethernet signal to gigabit switch
8 Ethernet D- Ethernet signal to gigabit switch
9 Gnd Power ground Pin 9
10 +24V dc Supply voltage Pin 10
11 Vinit + Balanced trigger pulse positive
12 Vinit - Balance tripper pulse negative
13 RS485D+ RS485 Data+ for Lane Controlle
14 RS485D- RS485 Data- for Lane Controlle
15 RS485D= RS485 Data+ for Lane Controlle
16 RS485D- RS485 Data- for Lane Controlle
Connection to
I/O Board X4
pin 1
Pin 2
Pin 3
Pin 4
Pin 5
Pin 6
Pin 7
Pin 8
Pin 11
Pin 12
Pin 13
Pin 14
Pin 15
Pin 16
Remarks
Cat5e/6 cable white/orange
Cat5e/6 cable orange
Cat5e/6 cable white/green
Cat5e/6 cable green
Cat5e/6 cable white/blue
Cat5e/6 cable blue
Cat5e/6 cable white/brown
Cat5e/6 cable brown
Black wire in Red/Black pai
Red wire in Red/Black pai
White wire in Brown/White pai
Brown wire in Brown/White pai
White wire in Red/White pai
Red wire in Red/White pai
White wire in Orange/White pai
Orange wire in Orange/White pai
6.3.5 Typical Wiring diagram
Figure 69. Category 5 or 6 ethernet wiring diagram.
Appendix B: J-Panel Functional & Connector Description 71
Page 84

VIS-CAM System
6.3.6 Indicators
There are two LED indicators mounted at the connector:
Table 23 LED indicators
LED label LED color Indication
Trig-1 Green Indicates generation of trigger pulse to camera
Off No trigger pulse
LC DATA LED not mounted
Power Green 24V present at connector pin 10
red No 24V at connector pin 10
6.3.7 Switches
There are two switches located at the connector:
Table 24 Connector switches
Switch label Switch color
S1 TRIG CAM-1 Push bottom
S5 TRIG POLARITY Slide Selects trigger polarity
6.4 X3: Light Sensor Connection
Figure 70. Light sensor indicator on the board
6.4.1 Functionality
The Light Sensor connector is labelled X3. The D0 and D1 RS485 bus is connected to X8 where the
RS485 to ethernet converter is to be connected.
Figure 71. Light sensor connector
Function
Generates a trigger pulse to the camera
72 Appendix B: J-Panel Functional & Connector Description
Page 85

VIS-CAM System
6.4.2 Connector specification
Connector type: 6 pole WAGO pluggable terminal block
Connector on board: WAGO 734-236
Cable part: WAGO 734-206
6.4.3 Connector signal specifications
6.4.3 (a) Power output
Voltage: 24V DC from power supply connected to X6 or X7
Current: 2A fused
6.4.3 (b) Databus D0 and D1
D0 and D1 are RS485 databus signals from the light sensor.
6.4.4 Connector physical Interface
Table 25 Physical interface connections
Pin Signal Description
1 24V dc Power output
2 Gnd Power return
3 D0+ RS485 databus D0+
4 D0- RS485 databus D0-
5 D1+ RS485 databus D1+
6 D1- RS485 databus D1+
Connection to
6.4.5 Indicators
There are two LED indicators mounted at the connector:
Table 26 LED physical indicators
LED label LED color
Power Green
red
Indication
24V present at connector 1
No 24V at connector pin 1
6.5 X4: Lane Controller Signal to J-Panel #2
Figure 72. Signal to J-panel #2
Appendix B: J-Panel Functional & Connector Description 73
Page 86

VIS-CAM System
6.5.1 Functionality
Lane Controller RS485 signal to a second J-Panel. The Lane Controller connected to X15 pin 1 and
pin 2 or a Lane Controller signal coming from another J-Panel can be connected by means of this
connector. If no plug is inserted into the connector a build-in switch activates a 120 ? termination
resistor.
6.5.2 Connector specification
Connector type: 8 pole shielded RJ45
Connector on board: Taitek/Kinsun ST3009S-880
Cable part: Standard RJ45 connector
6.5.3 Connector signal specifications
Datasignal
RS485 databus signals from the Lane Controller.
6.5.4 Connector physical Interface
Table 27 Physical connector table for J-panel 2.
Pin Signal Description
1 RS485+
2 RS485- RS485 databus D-
3 - NC
4 - NC
5 - NC
6 - NC
RS485 databus D+
Connection to
6.6 X5: Lane Controller Signal from J-Panel #1
Figure 73. Signal from J-panel #1
6.6.1 Functionality
Lane Controller RS485 signal from a first J-Panel. If more than one J-Panel is connected to the same
Lane Controller, the signal can be routed from J-Panel #1 X4 to J-Panel #2 X5.
6.6.2 Connector specification
Connector type: 8 pole shielded RJ45
Connector on board: Taitek/Kinsun ST3009S-880
Cable part: Standard RJ45 connector
74 Appendix B: J-Panel Functional & Connector Description
Page 87

VIS-CAM System
2 R
6.6.3 Connector signal specifications
6.6.3 (a) Data signal
RS485 databus signals from a Lane Controller connected to another J-Panel . 6.6.4 Connector
physical Interface
Table 28 Physical pin connections J-panel #1.
Pin Signal Description
1 RS485+ RS485 databus D+
S485- RS485 databus D-
3 - NC
4 - NC
5 - NC
6 - NC
6.7 X6, X7: 24V DC Power
Figure 74. Signal from J-panel #1
Connection to
6.7.1 Functionality
The J-Panel has one input for 24V DC (X6). There is one unfused output (X7) and four fused outputs
for Camera 0 (connector X1, fused 2A), Camera 1 (connector X2, fused 2A), Light Sensor (connector
X3, fused 2A) and RS485-to-ethernet Converter (connector X8, fused 300mA).
It is possible to reset all fuses and they also reset automatically (PTC type) after removal of
excessive load. The three power LED indicators are electrically located between the fuse and
connector and the status of the fuse is therefore indicated on the LED: when the LED is green the
load is ok, when the LED is red an overload condition is present.
Appendix B: J-Panel Functional & Connector Description 75
Page 88
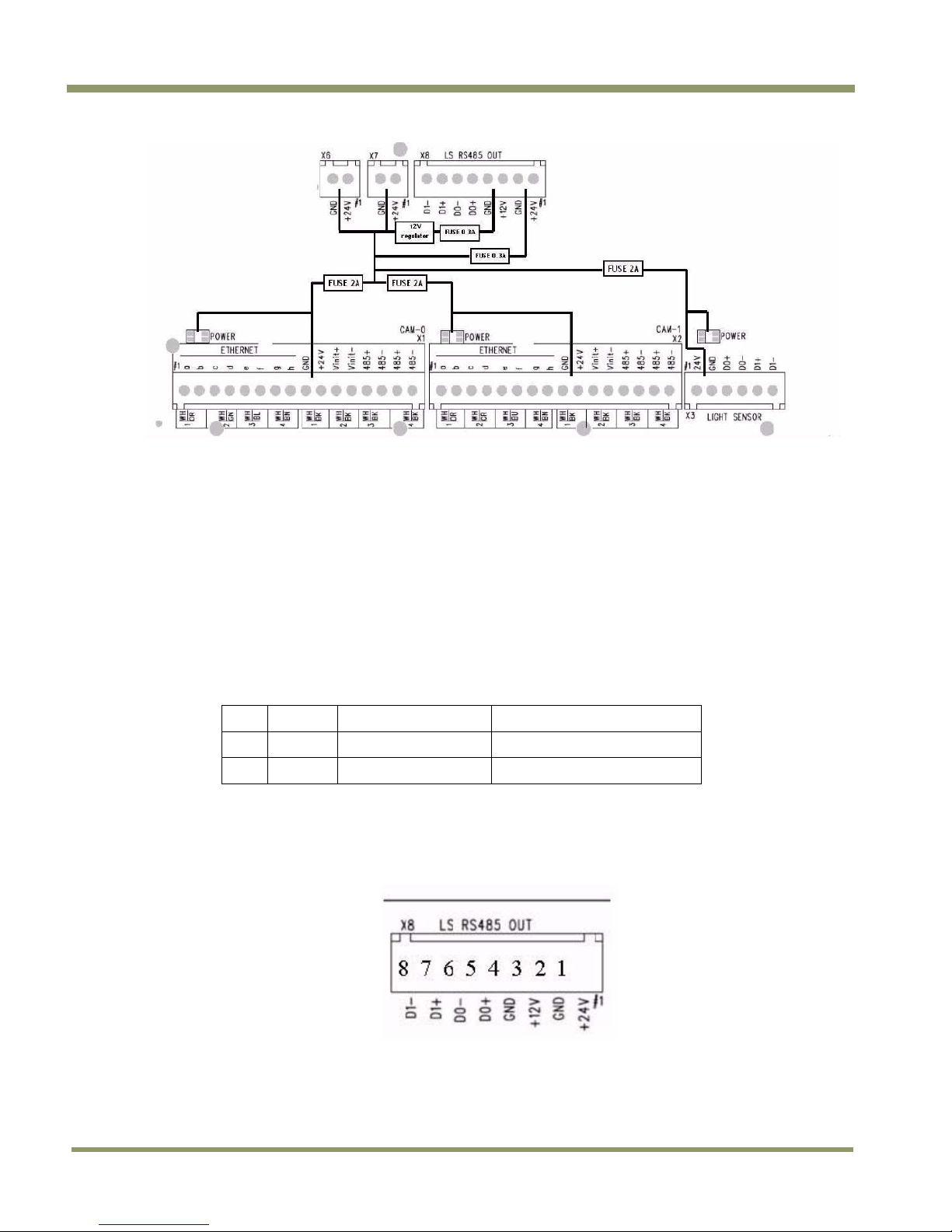
VIS-CAM System
y
y
Figure 75. Principle in the power distribution.
6.7.2 Connector specification
Connector type: 2 pole WAGO pluggable terminal block
Connector on board: WAGO 734-232
Cable part: WAGO 734-202
6.7.3 Connector signal specifications
24V DC power input. The two connectors are connected in parallel (unfused).
Maximum total current to X1, X2, X3 and X8: 6,3 A (fused value)
6.7.4 Connector physical Interface
Table 29 Physical connection for pins.
Pin Signal Description
1 +24V +24V DC
2 GND +24V return
6.8 X8: RS485 signal to Ethernet interface
Figure 76. RS485 to Ethernet
Connection to
24V DC power suppl
24V DC power suppl
6.8.1 Functionality
Interface to RS485-to-Ethernet converter. The signals come from the Light Sensor connection (X3).
Two power outputs for supplying the converter are available.
76 Appendix B: J-Panel Functional & Connector Description
Page 89

VIS-CAM System
6.8.2 Connector specification
Connector type: 8 pole WAGO pluggable terminal block
Connector on board: WAGO 734-238
Cable part: WAGO 734-208
6.8.3 Connector signal specifications
6.8.3 (a) Power output
Voltage: 24 V DC from power supply connected to X6 or X7
12 V DC from regulator on board
Current: 0.3A fused
6.8.3 (b) Databus D0 and D1
D0 and D1 are RS485 databus signals from the light sensor.
6.8.4 Connector physical Interface
Table 30 RS485 physical connections
Pin Signal Description
1 24V dc 24v Power output
2 Gnd Power return
3 +12V dc 12V power output
4 Gnd Power return
5 D0+ RS485 databus D0+
6 D0- RS485 databus D0-
7 D1+ RS485 databus D1+
8 D1- RS485 databus D1+
Connection to
6.9 X11: Ethernet Interface from Camera 0
Figure 77. Interface from Camera 0
6.9.1 Functionality
Ethernet interface from Camera 0 to Ethernet switch.
Appendix B: J-Panel Functional & Connector Description 77
Page 90

VIS-CAM System
6.9.2 Connector specification
Connector type: 8 pole shielded RJ45
Connector on board: Taitek/Kinsun ST3009S-880
Cable part: Standard RJ45 connector
6.9.3 Connector signal specifications
6.9.3 (a) Data signal
Ethernet signals on two pairs (Rx and Tx).
6.9.4 Connector physical Interface
Table 31 Physical connector description
Pin Signal Description
1 Ethernet A+ Ethernet signal
2 Ethernet A- Ethernet signal
3 Ethernet B+ Ethernet signal
4 (Ethernet C+) Ethernet signal
5 (Ethernet C-) Ethernet signal
6 Ethernet B- Ethernet signal
7 (Ethernet D+) Ethernet signal
8 (Ethernet D-) Ethernet signal
6.10 X12: Ethernet Interface from Camera 1
Figure 78. Interface from Camera 1
Connection to
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
6.10.1 Functionality
Ethernet interface from Camera 1 to Ethernet switch.
6.10.2 Connector specification
Connector type: 8 pole shielded RJ45
Connector on board: Taitek/Kinsun ST3009S-880
Cable part: Standard RJ45 connector
78 Appendix B: J-Panel Functional & Connector Description
Page 91

VIS-CAM System
6.10.3 Connector signal specifications
6.10.3 (a) Data signal
Ethernet signals on two pairs (Rx and Tx) .
6.10.4 Connector physical Interface
Table 32 Pin connections for Ethernet from Camera 1.
Pin Signal Description
1 Ethernet A+ Ethernet signal
2 Ethernet A- Ethernet signal
3 Ethernet B+ Ethernet signal
4 (Ethernet C+) Ethernet signal
5 (Ethernet C-) Ethernet signal
6 Ethernet B- Ethernet signal
7 (Ethernet D+) Ethernet signal
8 (Ethernet D-) Ethernet signal
Connection to
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
Gigabit switch
6.11 X14: External Trigger
Figure 79. External Trigger connection.
6.11.1 Functionality
The trigger inputs on the J-Panel are galvanically isolated by optocouplers in the input. The trigger
polarity can be selected on S3 and S5. Push button switches S1 and S4 are found for generating test
trigger pulses. The presence of a trigger pulse is indicated on the green LED’s marked TRIG-0 and
TRIG-1.
Appendix B: J-Panel Functional & Connector Description 79
Page 92

VIS-CAM System
Figure 80. Trigger polarity
6.11.2 Connector specification
Connector type: 4 pole WAGO pluggable terminal block
Connector on board: WAGO 734-234
Cable part: WAGO 734-204
6.11.3 Connector signal specifications
6.11.3 (a) Signal levels
Input signal amplitude 3-24 V Input current app. 1-20 mA
6.11.3 (b) Trigger 0 Electrical interface on the J-Panel
Figure 81. Trigger 0
6.11.3 (c) Trigger 1 Electrical interface on the J-Panel
Figure 82. Trigger 1
80 Appendix B: J-Panel Functional & Connector Description
Page 93

VIS-CAM System
6.11.4 Connector physical Interface
Table 33 Connector table
Pin Signal Description
1 Trig0+
2 Trig0- Negative trigger input to camera 0
3 Trig1+
4 Trig1- Negative trigger input to camera 1
Positive trigger input to camera 0
Positive trigger input to camera 1
6.12 X15: Lane Controller interface
6.12.1 Functionality
The signal path for the Lane Controller is shown in Figure 83. The signal lines symbolizes the two
balanced RS485 wires.
6.12.1 (a) Common Lane Controller
If one lane controller is to be connected to camera 0 and camera 1, LC DATA terminals labelled D0
on X15 is used.
The signal runs to Camera 0 and is daisy chained back. When S2 is in position “OPEN” D0 is
connected to Camera 1 and daisy chained back to connector X4. X4 has connection to a termination
resistor that is activated when no plug is inserted into X4. If more J-Panels are to be connected to
the same lane controller, see Figure 6.12.5.
Connection to
6.12.1 (b) Two Lane Controllers
If separate lane controllers are to be connected to the two cameras, databus D0 is connected to
Camera #0 and databus D1 is connected to Camera #1. Switch S2 must then be in position “TERM”.
The 120 ? termination resistor is then connected between the RS485 wires.
Figure 83. Lane controller setup diagram.
6.12.2 Connector specification
Connector type: 5 pole WAGO pluggable terminal block
Connector on board: WAGO 734-235
Cable part: WAGO 734-205
6.12.3 Connector signal specifications
D0 and D1 are RS485 data bus signals from the Lane Controller.
Appendix B: J-Panel Functional & Connector Description 81
Page 94

VIS-CAM System
6.12.4 Connector physical Interface
Table 34 WAGO physical interface
Pin Signal Description
1 D0+ RS485 databus D0+
2 D0- RS485 databus D0-
3 Gnd
4 D1+ RS485 databus D1+
5 D1- RS485 databus D1-
Connection to
6.12.5 Connecting Lane Controller RS485 signal between J-Panels
The Lane Controller RS485 signal is connected from one J-Panel to another by connecting RJ45
Patch cables between X4 on the source J-Panel to X5 on the receive J-Panel. The RJ45 connectors
have build-in switch function to disconnect the termination resistor when the plug is inserted. When
no plug is inserted into the X4 connector the line is terminated with 120 ?.
The Lane Controller is connected to D0 on X15 J-Panel #1.
Figure 84. Lane controller setup.
82 Appendix B: J-Panel Functional & Connector Description
Page 95
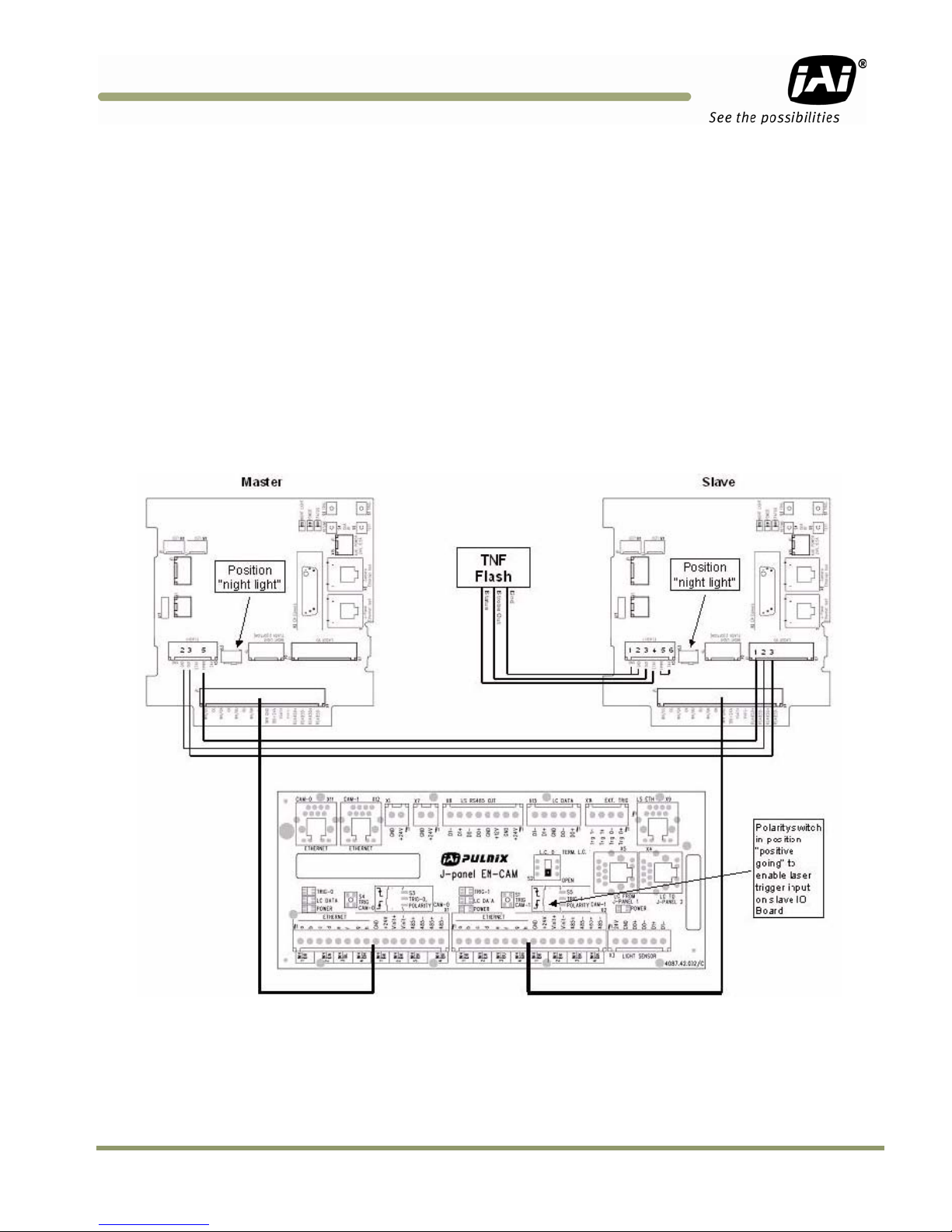
VIS-CAM System
7 Appendix C: Two Cameras, One Flash Configuration
Figure 7.1 shows how to connect one flash to two VIS CAM 300 cameras. The flash output from
camera 0, the master camera, is connected to the laser trigger input on camera 1, the slave
camera. The Flash unit is connected to the slave camera.
The flash output must always be enabled on the master camera. The flash output on the slave
camera is setup as normal (controlled by the values from the light sensor).
Figure 85. Two camera, one flash, configuration.
Three wires are connected from the flash connector on the IO Board of the Master camera to the
laser (LVD) connector on the IO Board of the Slave camera:
Appendix C: Two Cameras, One-Flash Configuration 83
Page 96

VIS-CAM System
Table 35 Master to slave connections.
Master Flash Connector (X5)
Pin 2
Pin 3
Pin 5
Slave Laser Connector (X7)
Pin 2
Pin 3
Pin 1
• Junction Panel trigger polarity switch in position “positive going edge”
• Master camera flash must be set to “auto” in Properties section of ENSetup software
• Slave camera flash must be set to “light sensor control” in properties section of ENSetup
software
84 Appendix C: Two Cameras, One-Flash Configuration
Page 97

VIS-CAM System
V
V
8 Appendix D: Pluggable Terminal Blocks
The connectors on the VIS CAM 300 IO Board and J-Panel are pluggable terminal blocks with pin
spacing of 3.81 mm/ 0.15 inch from WAGO. The contacts are spring loaded.
Figure 86. Terminal bl ock
Table 36 Essential specifications for the pluggable terminal block.
Cross section from [mm²]
Cross section to [mm²]
Cross section from [AWG]
Cross section to [AWG]
Measured voltage EN
Measured shock voltage
*Pollution degree 2
Current intensity EN
Strip length from 7 mm
Strip length to 7 mm
Strip length 0,28 in
0,08 mm²
1,5 mm²
28 AWG
14 AWG
250
2,5 k
10 A
When mounting the wire into the connector the wire is stripped 7mm. The connector spring is
released by using one of two tools:
WAGO 734-230
JAI 2900.00.249
WAGO 210-250
JAI 2900.00.250
The wire is inserted and the spring is activated.
Appendix D: Pluggable Terminal Blocks 85
Page 98

VIS-CAM System
86 Appendix D: Pluggable Terminal Blocks
Page 99

VIS-CAM System
9 Appendix E: Moxa N-Port 5232 Configuration
Configuration of the Moxa N-Port server is done through a standard web-browser or using Telnet.
If you are unfamiliar with the configuration terms, please consult the enclosed Moxa N-Port server
manual.
To carry out the configuration using Internet Explorer, type the IP-address of the unit in the address
field:
http://192.168.127.254 <CR>
You should now be able to configure the unit through the embedded web-server.
To carry out the configuration using Telnet, open the command prompt window – type the following:
Telnet 192.168.127.254 <CR>
You should now be able to configure the unit through the Telnet interface.
The necessary settings will be listed under its designated sub-menu. The items underlined in bold
italics (example - Delimiter: D
Basic Settings:
Server name: Enter the desired name for the N-Port server.
Time zone: Enter the correct time zone for the system location.
Local time: Enter the correct time for the system location.
Time server: Enter IP-Address or domain name for the desired time server.
Web console: Enables / Disables the web configuration utility.
Telnet console: Enables / Disables the Telnet configuration utility.
) must be configured as described.
Figure 87. Standard configuration of Basic Settings:
Appendix E: Moxa N Port 5232 Configuration 87
Page 100

VIS-CAM System
Network Settings:
IP address: Enter the desired IP address of the unit. The default address from the
factory is 192.168.127.254 unless otherwise specified.
Netmask: Enter the subnet mask of the unit. The default subnet mask from the
factory is 255.255.255.0 unless otherwise specified.
Gateway: Enter the default gateway of the unit.
IP Configuration: Specify whether the unit uses static of dynamic IP address.
DNS Server 1 Specify primary DNS server to be used by the unit.
DNS Server 2 Specify secondary DNS server to be used by the unit.
SNMP. Enables / Disables the SNMP protocol.
Auto report to IP: Reports generated by the auto report function will be automatically be
forwarded to IP address specified in this field.
Auto report to TCP Port: Specify the TCP port number for the auto report function. The default
port is 4002.
Auto report period: Time interval for error reporting.
Figure 88. Standard configuration of Network Settings:
88 Appendix E: Moxa N Port 5232 Configuration
 Loading...
Loading...