

Page 1
RM/TM-4200GE
RMC/TMC-4200GE
Digital Monochrome/Color
Progressive Scan, Interline-Transfer GE Camera
Document Version: E
Document P/N: 10394
Page 2

Page 3
RM/TM-42
00GE Series
Disclaimer
The material contained in this manual consists of information that is proprietary to JAI Inc., and may only be
used by the purchasers of the product. JAI, Inc. makes no warranty for the use of its product and assumes no
responsibility for any errors which may appear or for damages resulting from the use of the information
contained herein. JAI, Inc. reserves the right to make changes without notice.
Microsoft, Windows 95, 98, NT, 2000, XP, and Windows Explorer are either registered trademarks or trademarks
of Microsoft Corporation in the United States and/or other countries.
Warranty
Please contact your factory representative for details about the warranty.
Certifications
CE Compliance
The RM/TM-4200GE series of cameras has been certified to conform to the requirements of Council Directive
89/336/EC for electromagnetic compatibility and to comply with the following European Standards:
EMC EN55022: 1998 + A1: 2000 CLASS A
EN55024: 1998 + A1: 2001
All JAI Inc. products bearing the CE mark have been declared to be in conformance with the applicable EEC
Council Directives. However, certain factory-installed options or customer-requested modifications may
compromise electromagnetic compatibility and affect CE compliance. Please note that the use of interconnect
cables that are not properly grounded and shielded may affect CE compliance.
Contact the JAI Inc. Applications Engineering Department for further information regarding CE compliance.
FCC
This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to
Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful
interference when the equipment is operated in a commercial environment. This equipment generates, uses
and can radiate radio frequency energy and, if not installed and used in accordance with the instruction
manual, may cause harmful interference to radio communications. Operation of this equipment in a residential
area may cause harmful interference, in which case the user will be required to correct the interference at his
own expense.
Disclaimer iii
Page 4

RM/TM-4200GE Series
WARNING
Changes or modifications to this unit not expressly approved by the party responsible for FCC compliance could
void the user’s authority to operate the equipment.
RM/TM-4200GE Series Operation Manual
JAI Inc.
625 River Oaks Parkway
San Jose, CA 95134
Tel:(408) 383-0300
Tel:(800) 445-5444
Fax:(408) 383-0301
www.jai.com
October 09, 2009
iv Disclaimer
Page 5

RM/TM-42
00GE Series
Table of Contents
Disclaimer Notice ........................................................................................................ iii
Table of Contents ........................................................................................................ v
List of Figures ............................................................................................................ vii
List of Tables ..............................................................................................................ix
Hardware Introduction ........................................................................................... 9
1
1.1 Product Description .............................................................................................. 9
1.2 Features ........................................................................................................... 9
2 Installation ......................................................................................................... 11
2.1 Getting Started .................................................................................................. 11
2.1.1 Unpacking Instructions ......................................................................................... 11
2.1.2 Components ...................................................................................................... 11
2.1.3 Accessories and Options ........................................................................................ 11
2.2 Camera Setup .................................................................................................... 11
2.2.1 Heat Dissipation ................................................................................................. 11
2.2.2 Connector Pin Configurations ................................................................................. 11
2.2.3 Power Supplies and Power Cable Setup ..................................................................... 12
2.2.4 Attaching the Camera Lens .................................................................................... 14
2.2.5 Adjustable Back-Focus ......................................................................................... 14
3 Operation .......................................................................................................... 15
3.1.1 Preset Scan Area ................................................................................................ 15
3.1.2 Programmable Scan Area ...................................................................................... 15
3.1.3 Full Scan Area 2x2 Binning ..................................................................................... 16
3.1.4 Resolution Proportional Digital Zoom ........................................................................ 17
3.2 Bayer Color Filter (Color Versions) ........................................................................... 20
3.2.1 Color Filter Array ................................................................................................ 20
3.2.2 Bayer Color Filter Array (CFA) ................................................................................ 20
3.2.3 Starting Pixel Configuration ................................................................................... 21
3.2.4 Sync and Data .................................................................................................... 21
3.2.5 Camera Functions ............................................................................................... 22
3.2.6 Interpolation Software ......................................................................................... 23
3.2.7 Color Interpolation .............................................................................................. 23
3.3 Electronic Shutter ............................................................................................... 23
3.3.1 Preset Shutter ................................................................................................... 23
3.3.2 Programmable Exposure-Continuous Mode .................................................................. 23
3.3.3 Asynchronous No Shutter Mode ............................................................................... 24
3.3.4 Asynchronous Programmable Exposure Mode ............................................................... 25
3.3.5 Pulse Width Control Mode ..................................................................................... 26
3.3.6 Particle Imaging Velocimetry Fixed Exposure Mode ....................................................... 26
3.3.7 PWC PIV Mode ................................................................................................... 27
3.4 Dynamic Range Control ........................................................................................ 28
3.4.1 Programmable Look-Up Table (LUT) and Knee Control ................................................... 28
3.5 External Sync and Pixel Locking .............................................................................. 29
3.6 Camera Timing Charts .......................................................................................... 29
4 Functions & Operations ......................................................................................... 33
4.1 GigE Vision Standard Interface ................................................................................ 33
4.2 GigE Vision-Aware Software ................................................................................... 33
4.3 Recommended Network Configurations ..................................................................... 33
4.3.1 Verified Network Interface Cards (NICs) .................................................................... 33
4.3.2 Video data rate (network bandwidth) ....................................................................... 33
4.3.3 Disable Firewalls ................................................................................................ 34
4.3.4 Enabling Jumbo Frames ........................................................................................ 34
4.3.5 Setting Receive Descriptors ................................................................................... 36
Table of Contents v
Page 6

RM/TM-4200GE Series
4.3.6 Interrupt Moderation rate ..................................................................................... 37
4.3.7 Calculating and setting Inter-Packet Delay ................................................................. 37
4.3.8 Confirm the Filter Driver is used ............................................................................. 38
5 Configuring the Camera ......................................................................................... 40
5.1 Acquisition and Trigger Controls ............................................................................. 40
5.2 AnalogControls .................................................................................................. 41
5.3 Image Size Controls ............................................................................................ 42
5.4 Image Preprocessing ........................................................................................... 44
5.5 LUT (Look Up Table) ........................................................................................... 45
5.6 UserSets .......................................................................................................... 45
5.7 DeviceInformation .............................................................................................. 46
5.8 GigEVisionTransportLayer ..................................................................................... 47
5.8.1 Persistent IP ..................................................................................................... 47
5.8.2 Stream Channel Packet Size .................................................................................. 48
5.9 IPEngine .......................................................................................................... 48
5.9.1 SignalRoutingBlock ............................................................................................. 50
5.9.2 ControlBits ....................................................................................................... 52
5.9.3 PLC LookupTable ............................................................................................... 52
5.9.4 PLCSpecialConfigurations ..................................................................................... 54
5.9.5 Counters ......................................................................................................... 56
5.9.6 Pulse Generators controls ..................................................................................... 57
5.9.7 PLC Grabber Features .......................................................................................... 58
5.9.8 IPEngine Examples: ............................................................................................. 58
5.10 Register Map ..................................................................................................... 59
6 Troubleshooting .................................................................................................. 64
6.1 Problems and Solutions ........................................................................................ 64
6.1.1 Symptom: No Video ............................................................................................ 64
6.1.2 Symptom: Dark Video .......................................................................................... 64
6.1.3 Symptom: Non-Synchronized Video .......................................................................... 64
6.1.4 Symptom: Image incomplete or contain black lines. ..................................................... 64
6.1.5 Symptom: Notebook Computer Driver Installation Problems ............................................ 64
6.2 Information and Support Resources.......................................................................... 64
7 Appendix ........................................................................................................... 65
7.1 Specifications ................................................................................................... 65
7.1.1 TM-4200GE Physical Dimensions .............................................................................. 66
7.1.2 Spectral Response .............................................................................................. 67
vi Disclaimer
Page 7

RM/TM-42
00GE Series
List of Figures
Figure 1.
Figure 2. GigE Ethernet Connector ............................................................................... 12
Figure 3. 12P-02S Interface Cable (optional) ................................................................... 13
Figure 4. Back-Focus Set-Screw Locations ...................................................................... 14
Figure 5. Bayer 1 .................................................................................................... 16
Figure 6. Bayer 2 .................................................................................................... 16
Figure 7. 2x2 Binning ............................................................................................... 17
Figure 8. Overview of Resolution Proportional Digital Zoom ................................................. 17
Figure 9. 1x Digital Zoom .......................................................................................... 18
Figure 10. 1.3x Digital Zoom ........................................................................................ 18
Figure 11. 2x Digital Zoom .......................................................................................... 19
Figure 12. 4x Digital Zoom .......................................................................................... 19
Figure 13. Bayer Color Filter Response ........................................................................... 21
Figure 14. Example of Color CCD CFA Pattern ................................................................... 21
Figure 15. Example of TMC-4200GE in Default Mode. .......................................................... 22
Figure 16. External Trigger Timing. ............................................................................... 24
Figure 17. Asynchronous Programmable External Trigger ...................................................... 25
Figure 18. Pulse Width Control Trigger ........................................................................... 26
Figure 19. PIV Exposure Timing Table ............................................................................. 27
Figure 20. PWC PIV Timing Table. ................................................................................. 27
Figure 21. Output and Blooming ................................................................................... 28
Figure 22. Camera Timing Chart ................................................................................... 30
Figure 23. Digital Data Output Order for Configuration ........................................................ 31
Figure 24. Field Video Timing--Continuous Mode ................................................................ 31
Figure 25. Acquisition And Trigger Controls Category .......................................................... 40
Figure 26. AnalogControls Category ............................................................................... 41
Figure 27. ImageSizeControl category............................................................................. 42
Figure 28. Image Output Example ................................................................................. 43
Figure 29. LookUp Table............................................................................................. 45
Figure 30. UserSets Category ....................................................................................... 46
Figure 31. DeviceInformation Category ........................................................................... 46
Figure 32. GigEVisionTransportLayer Persistent IP .............................................................. 47
Figure 33. PLC LUT Diagram ........................................................................................ 49
Figure 34. PLC ......................................................................................................... 50
Figure 35. SignalRoutingBlock ...................................................................................... 50
Figure 36. ControlBits ................................................................................................ 52
Figure 37. PLC Q Output ............................................................................................. 53
Figure 38. PLC Special Configurations ............................................................................. 55
Figure 39. CountersAndTimersControls ........................................................................... 55
Figure 40. Physical Dimensions ..................................................................................... 66
Figure 41. TM-4200 Spectral Response ............................................................................ 67
Figure 42. TMC-4200 Spectral Response .......................................................................... 67
12-Pin Connector Pinouts. ............................................................................. 12
List of Figures vii
Page 8

RM/TM-4200GE Series
List of Tables
Table 1 12-Pin Connector ........................................................................................ 12
Table 2 Scan Area Start Points. ................................................................................. 20
Table 3 Electronic Preset Shutter .............................................................................. 23
Table 4 Asynchronous Mode Chart .............................................................................. 28
Table 5 TM-4200GE Timing table ............................................................................... 29
Table 6 Video Output ............................................................................................. 31
Table 7 External HD Locking and External VD Reset ......................................................... 32
Table 8 Async Reset ............................................................................................... 32
Table 9 TM-4200GE Camera Specifications Table ............................................................ 65
viii List of Tables
Page 9
RM/TM-42
00GE Series
1 Hardware Introduction
1.1 Product Description
The JAI Inc. TM-4200GE series is a Gigabit Ethernet output, high-resolution progressive scan CCD camera.1 The
interline-type CCD permits full vertical and horizontal resolution of very high speed shutter images and
applications. The electronic shutter, which has speeds to 1/16,000 sec., can be reset asynchronously by
external pulse control. The frame rate for a full image is 15 fps. A square imager format with uniform square
pixels provides superior image definition in any orientation. On-chip micro lenses provide increased sensitivity.
The TM-4200GE
table (LUT) knee slopes to convert 12-bit input to 10-bit or 8-bit output, thereby optimizing the CCD’s full
dynamic range in the normal output signal range. As a Gigabit Ethernet output camera, the TM- 4200GE has
semi-auto-gain balancing functions. The camera does not have a LUT for the 12-bit output.
Applications for the TM-4200GE include machine vision, medical imaging, intelligent transportation systems,
high-definition graphics, on-line inspection, gauging, character reading, archiving, and high security
surveillance.
2
has a full dynamic range control function, which can be set at externally selectable look-up
RM/TM-4200GE Series
Hardware
1.2 Features
• Small size and light weight
The printed circuit boards in the TM-4200GE have been arranged to create modular electronics, giving the
camera flexibility. In addition, the use of miniature solid-state components results in a compact,
lightweight camera that is 51mm x 51mm x 85mm in dimensions, and weighs only 214 grams.
• Imager
The TM-4200GE uses a dual-tap progressive scan interline transfer CCD that has the following features:
− Resolution of 2k x 2k active pixels for excellent image quality.
− 7.4 x 7.4 μm square pixels for precise dimensional measurement.
− High-speed electronic shutter capability for high dynamic resolution of moving objects that
eliminates the need for a mechanical shutter.
− Progressive scan CCD eliminates interlace deterioration of image and increases ease of computer
interface.
− High sensitivity and low noise during fast scanning. The CCD has an excellent S/N ratio at the
default setting that is greater than 58dB.
− The CCD has built-in microlenses for increased quantum efficiency.
1
The TM-4200GE series consists of the TM-4200GE (monochrome) and the TMC-4200GE (color), as well as the RoHS-compliant versions
RM-4200GE and RMC-4200GE. Unless otherwise noted, all information contained in this manual is relevant to all 4200GE models.
2
The TM-4200GE output is available with 8-bit, 10-bit or 12-bit processing.
Hardware Introduction 9
Page 10

RM/TM-4200GE Series
• Electronic shutter
The TM-4200GE has a substrate drain-type shutter mechanism which provides superb pictures at various
speeds without smearing.
• Asynchronous reset
The TM-4200GE captures async reset images and provides single-shot video output with single FDV (frame
data valid). The TM-4200GE’s asynchronous reset is flexible and accepts external horizontal drive (HD) for
phase locking. When the VINIT (5V) pulse is applied to CC1, it resets the camera's scanning and purging of
the CCD.
The TM-4200GE has three modes to control the asynchronous reset and shutter speed:
− Async no shutter: The video signal and FDV are reset by external VINIT.
− Internal shutter speed control: The speed control varies from 1/15 to 1/16,000 sec. The video signal
and FDV starts with internal V reset timing related to shutter speed.
− External VINIT with pulse width: The duration between pulse edges controls the shutter speed
externally.
• Output
The TM-4200GE has a dual-tap 12-bit/10-bit/8-bit Gigabit Ethernet output.
• Dual-channel auto black level balancing and semi-auto gain balancing
The TM-4200GE, as a dual-tap output camera, has auto black level balancing and semi-auto gain balancing
functions.
• Warranty
Please contact your factory representative for details about the warranty.
10 Hardware Introduction
Page 11

RM/TM-42
00GE Series
2 Installation
The following instructions will help you set up your camera quickly and easily. JAI suggests that you read
through these instructions first, before you unpack and set up your camera system.
2.1 Getting Started
2.1.1 Unpacking Instructions
JAI recommends that you save the original packing cartons for the cameras and accessories in case you need to
return or exchange an item. We also recommend that you bench-test any equipment being sent to another
location for field installation to assure that everything is fully operational as a system.
2.1.2 Components
When you receive your TM-4200GE camera from JAI Inc., the contents of the shipping box should include the
camera and a document download card. If either of these items are missing, please contact your JAI Inc.
representative immediately. The document download card includes instructions and web locations for
downloading the datasheet, manual, and camera-control software. If you do not have Internet access, please
contact JAI Inc. to receive this material on a CD-ROM.
2.1.3 Accessories and Options
Following is a list of additional accessories and options that may be required for your application. Please check
with your JAI Inc. representative before you install your camera to determine what you might need.
• PD-12U series power supply
• 12P-02S power cable
• Cat5e or Cat6 shielded Ethernet cable (not supplied by JAI Inc.)
• Tripod Mounting Kit: TP-20
(for dimensions go to: www.jai.com/EN/CameraSolutions/Products/Accessories/Pages/Home.aspx
2.2 Camera Setup
2.2.1 Heat Dissipation
The TM-4200GE is a compact 2k by 2k camera. Since all the electronics have been packed in a compact
package, the outer case of the camera can become hot due to heat dissipation. For optimal performance, JAI
Inc. recommends using a cooling fan to set up a positive air flow around the camera and following the
precautions below.
• Mount the camera on a large heat sink (camera bracket) made out of heat-conductive material like
aluminum.
• Make sure the flow of heat from the camera case to the bracket is not blocked by a non-conductive
material like plastic.
• Make sure the camera has enough open space around it to facilitate the free flow of air.
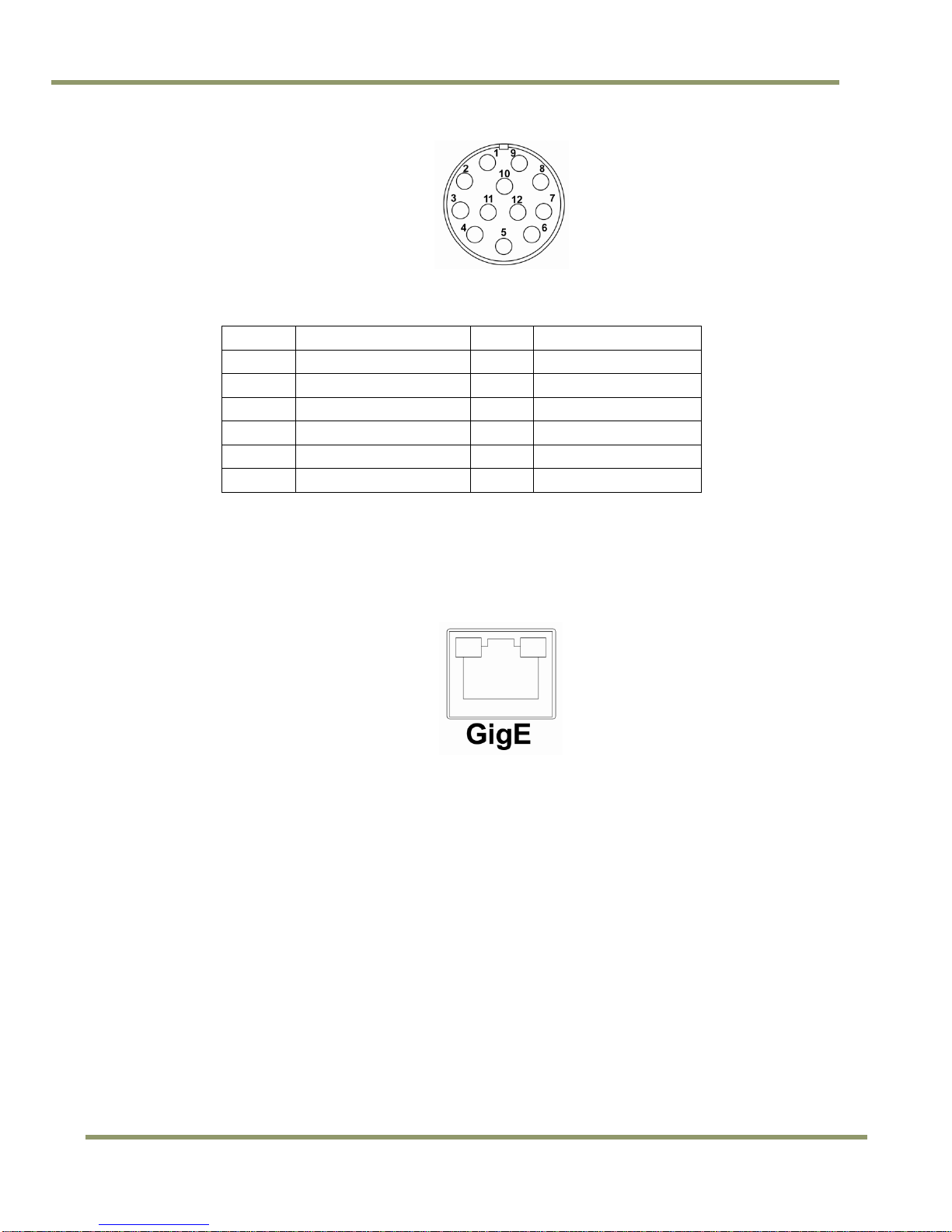
2.2.2 Connector Pin Configurations
2.2.2 (a) 12-Pin Connector
The TM-4200GE has a 12-pin Hirose connector for power input and signal integration. Pin #1 is Ground and pin
#2 is +12V DC. The pin-out table is shown in Table 1.
)
Installation 11
Page 12
RM/TM-4200GE Series
9
10
12
Figure 1. 12-Pin Connector Pinouts.
Pin #1 is Ground and pin #2 is +12V DC. Table 1 shows the pin-out table.
Table 1 12-Pin Connector
Pin Description
1 GND 7
2 +12V DC 8
3 GND (analog)
4 Analog Video out
5 GND (digital) 11 Reserved
6 VINIT in (CC1 equiv)
2.2.2 (b) Ethernet Connector
The GigE socket, marked on the camera’s back panel as “GigE,” is a standard RJ-45 Ethernet socket as shown in
Figure 2.
Pin
VD in (CC4 equiv)
Strobe Output
HD in (CC3 equiv)
Reserved
Reserved
Description
Figure 2. GigE Ethernet Connector
Use at least Cat5e UTP cables (Cat6 cables are preferred). JAI recommends the use of shielded cables to
reduce emissions and for CE/FCC compliance. Double-shielded cables further reduce emissions.
2.2.3 Power Supplies and Power Cable Setup
2.2.3.1 Power Supplies
The TM-4200GE camera requires 12V DC power that is obtained through the 12-pin connector located on the
rear panel of the camera. JAI, Inc. power supplies feature a 100-240V AC/12V DC 1.2A universal voltage power
supply. JAI Inc. recommends the following power supplies:
PD-12UU PD-12-UU(No Hirose 12-pin connector)
PD-12UUP PD-12UU with 12-pin connector
PD-12UE PD-12UU (No Hirose 12-pin connector)
PD-12UEP PD-12UU with 12-pin connector European plug
For users providing power through the 12-pin connector, the PD-12P, PD-12UEP and PD-12UUP power supplies
are available with the 12-pin mating connector already attached to the leads from the power supply. The PD12UU and PD-12UE power supplies can be connected to the JAI Inc. power cable either directly or using a
terminal strip.
12 Installation
US plug
US plug
European plug
Page 13
RM/TM-42
00GE Series
7
8
9
10
11
When wiring the PD-12UU and PD-12UE power supplies directly, please note the following:
• The lead ends must be twisted together and tin-soldered for strength and electrical continuity.
• Shrink tubing or a similar insulator should be used to prevent exposed leads from touching and shorting.
• The +12V lead is marked with a red stripe or white lettering; be sure not to reverse the leads.
• All connections must be properly insulated to prevent shorting.
2.2.3.2 JAI Power Cables
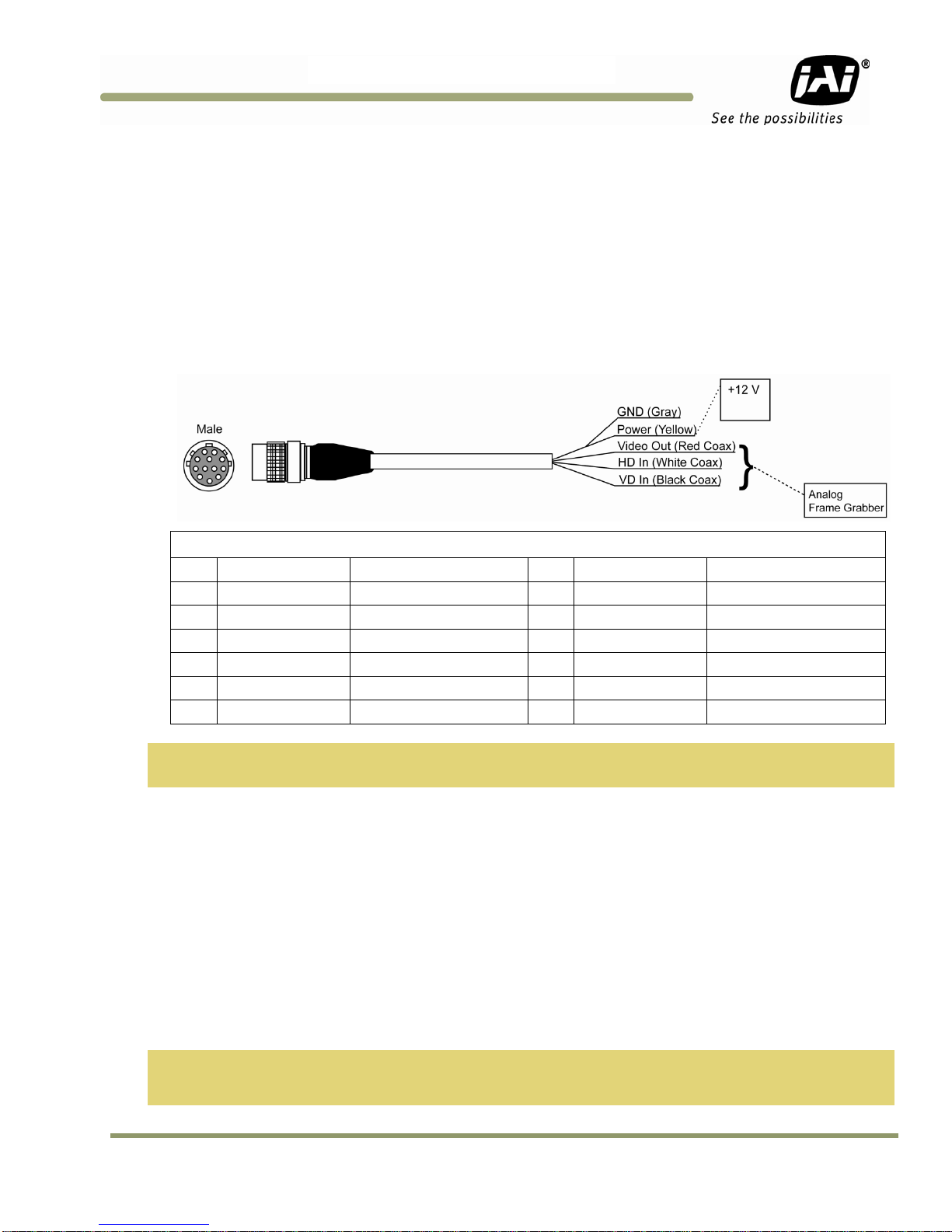
If you are using JAI power cables such as the 12P-02S, refer to Figure 3 which shows the cable pin-out diagram
and pin-outs. The color-coded leads use Gray for Ground and Yellow for +12V.
Figure 3. 12P-02S Interface Cable (optional)
12P-02S Interface Cable
Pin # Lead Color Function
1 Gray GND (Power Ground)
2 Yellow +12V DC (Power In)
3 Red coax shield GND (Analog Ground)
4 Red coax VIDEO (Analog Out)
5 Orange coax shield GND (Digital Ground)
6 Orange coax TTL IN (External_Trigger) 12 Black coax shield RESV
Pin #
Lead Color Function
Black coax
White coax shield TTL OUT (STROBE)
White coax
Brown
Blue
TTL IN (External_VD)
TTL IN (External_HD)
RESV
RESV
Note: Make sure that the unused leads are not touching and that there is no possibility that exposed wires
could cause the leads to short.
2.2.3.3 Building Your Own Power Cable
Refer to the 12-pin connector pin-out in Table 1 on page 12. Connect the Ground lead to pin #1, and the +12V
DC lead to pin #2 of the 12-pin connector. Power must be DC-regulated, and of sufficient current to properly
power the camera.
2.2.3.4 Attaching the Power Cable to the Connector
The 12-pin connector is keyed and will only fit in one orientation. To properly attach the power cable to the
camera connector, use the following steps:
Rotate the connector while applying slight pressure until the keyways line up.
Press the connector into place until firmly seated.
Plug the power cord into the 100V AC socket. This powers up the camera.
Note: If using a power supply other than the standard PD-12U Series from JAI, certain characteristics are
required of the power supply and the wiring in order to properly power the camera. The camera requires
12V immediately upon start-up; no slow ramps. Once power is applied, the po wer supply must be able to
Installation 13
Page 14
RM/TM-4200GE Series
support a 2A to 2.5A in-rush current for approximately 200µs to prevent the voltage at the camera from
dropping below the 10.8V minimum required. Dropping below this will result in the camera’s inter nal
power supply lowering its impedance in an attempt to draw more current. Since no more current will be
available, the voltage at the camera will drop instead. This will result in a steady state hang-up which
will damage the camera’s power supply and cause the camera to cease operating or to operate in an
unstable manner.
2.2.4 Attaching the Camera Lens
The TM-4200GE camera accepts 1.2-inch or larger format size C-mount lenses. To attach the C-mount lens3 to
the camera, carefully engage the threads and rotate the lens clockwise until it firmly seats on the mounting
ring. Do not force the lens if it does not seat properly. Some lenses with extremely long flange backs may
exceed the mounting depth of the camera.
2.2.5 Adjustable Back-Focus
Before cameras are shipped, back focus is carefully set using a collimator, oscilloscope and other specialized
equipment. While the factory-set focus serves well in most cases, an adjustable back focus makes it possible to
improve image sharpness when using lower-cost zoom lenses, custom optics, or in unusual parameters.
There should be an obvious need to refocus the lens before attempting to change the back focus. This is a very
exacting task. Some cameras have been returned to the factory to reset the back focus after failed attempts to
change the focus by customers. It might be wise to label cameras whose back focus was adjusted.
1. The camera must be connected to a monitor before attempting to adjust the back focus.
2. To back focus the camera, first attach a C-mount lens in the mount. Be certain that the lens is properly
seated.
3. Next set the lens focus to infinity (if the lens is a manual iris, set the iris to a high f number while still
retaining a well illuminated image).
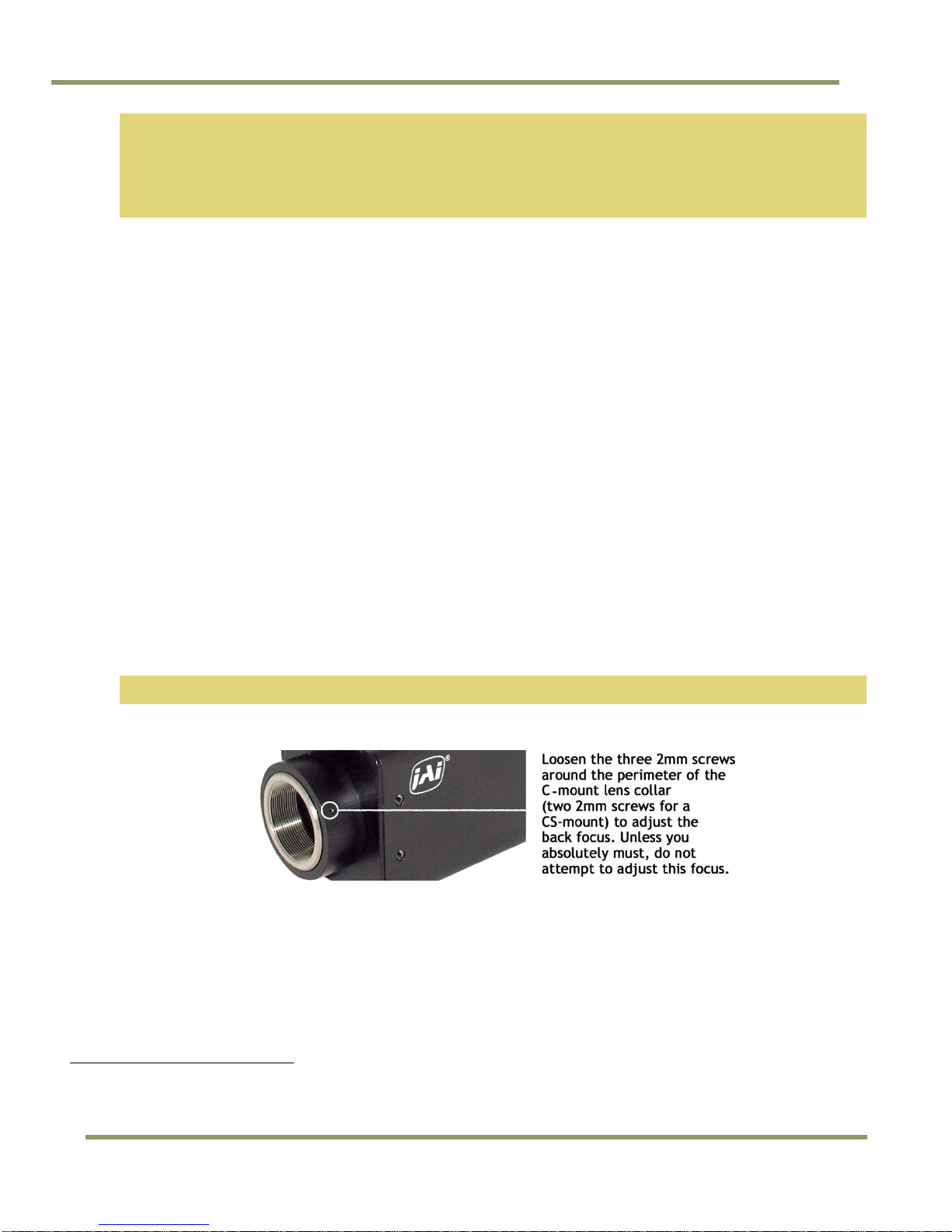
4. Loosen the three miniature hex set-screws (use a 0.9 mm hex wrench) that lock the focus ring in place
(two screws for a CS-mount). Slowly turn the lens and focus ring assembly back and forth until you obtain
the best image of the desired object. This sets the back focus. Once the best image is obtained, tighten
the focus ring set-screws until they are snug. Do not over-tighten the screws.
Note: Mini-bayonet cameras adapted to C-mount do not have the back focus feature.
Figure 4. Back-Focus Set-Screw Locations
3
C-mount to F-mount and C-mount to K-mount adapters are available for larger format lenses (35mm). Check with local photography
dealers for these lens adapters.
14 Installation
Page 15

RM/TM-42
00GE Series
3 Operation
Progressive Scanning
The TM-4200GE uses a state-of-the-art progressive scanning interline transfer CCD (Kodak KAI-16000) which
scans all lines sequentially from top to bottom at one frame rate. Like a non-interlace computer monitor, it
outputs a stable, crisp image without alternating lines and a full vertical resolution of 2048 lines. Note: many
computer monitors may not support the full vertical resolution of the TM-4200GE, however most modern
monitors have display modes ranging as high as 2048 x 1536 pixels, enabling the output of a TM-4200GE camera
to be displayed at nearly full resolution.
Progressive scanning is in contrast to standard TV-system interlace scanning which alternates outputting
“fields” of odd and even lines to produce one frame. The scanning rate is either 50Hz or 60Hz depending on the
TV standard used, resulting in a frame rate of either 25 fps or 30 fps. This is true even for many HDTV sets,
which can support a maximum of 780 progressive scan lines (780p) or 1080 interlaced scan lines (1080i).
The use of an interline transfer (IT) architecture in conjunction with progressive scanning enables the TM4200GE to support simultaneous electronic shuttering of all lines/pixels in order to freeze fast moving objects.
This is different from frame transfer architectures which require a mechanical shutter or strobe light to
capture objects in motion.
3.1.1 Preset Scan Area
TM/TMC-4200 has four fixed Scan Area Modes: full scan, centered 1000 lines, centered 500 lines, and centered
250 lines. In full scan mode, all active lines of the CCD sensor, 2048 lines, are transferred out line by line. In
centered mode 1000 lines are transferred out, in 500 line and 250 line mode, only the centered lines are
transferred out line by line. The rest of the lines are dumped out using the fast dump function of the CCD. This
transfer method causes the frame rate of each mode to vary.
3.1.2 Programmable Scan Area
In Programmable Scan Area Mode, users can specify both the start point of the active scan area and the total
active lines. The area selected by users is transferred out line by line. The rest of the lines are dumped out
using the fast dump function of the CCD. The frame rate in this mode varies according to the selected active
area. When the active area starts from x row, and the active lines are y lines, the frame rate can be calculated
using the following formulas.
Operation 15
Page 16
RM/TM-4200GE Series
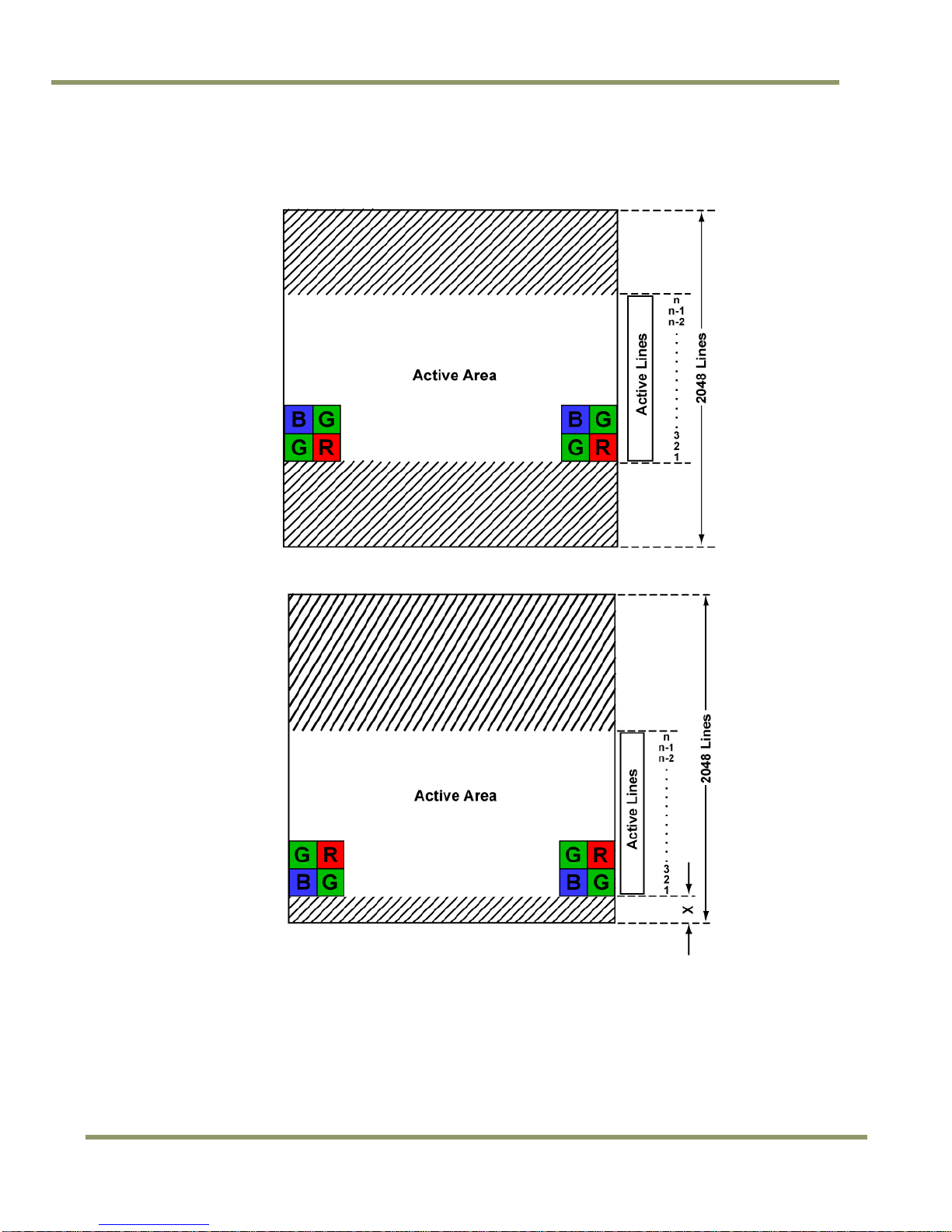
For a color CCD, the upper-left Bayer pattern changes, depending on the start point location. If the start point
is the odd row, the upper-left Bayer pattern is G. In RG if the start point is the even row, the upper-left bayer
pattern is B in BG.
Figure 5. Bayer 1
Figure 6. Bayer 2
3.1.3 Full Scan Area 2x2 Binning
TM/TMC-4200 CL has 2x2 binning of the full scan area. In full scan 2x2 binning mode, pixel (i, j) includes all the
information of pixel (2i-1, 2j-1), (2i-1, 2j), (2i, 2j-1) and (2i, 2j) in normal full scan mode (where i, j=1 2, ...,
1024). In this mode vertical binning makes frame transfer faster than normal scan mode, however, due to the
mixture of pixel information, the camera resolution is low in this mode, and the Bayer pattern CCD camera
loses color information.
16 Operation
Page 17
RM/TM-42
00GE Series
Figure 7. 2x2 Binning
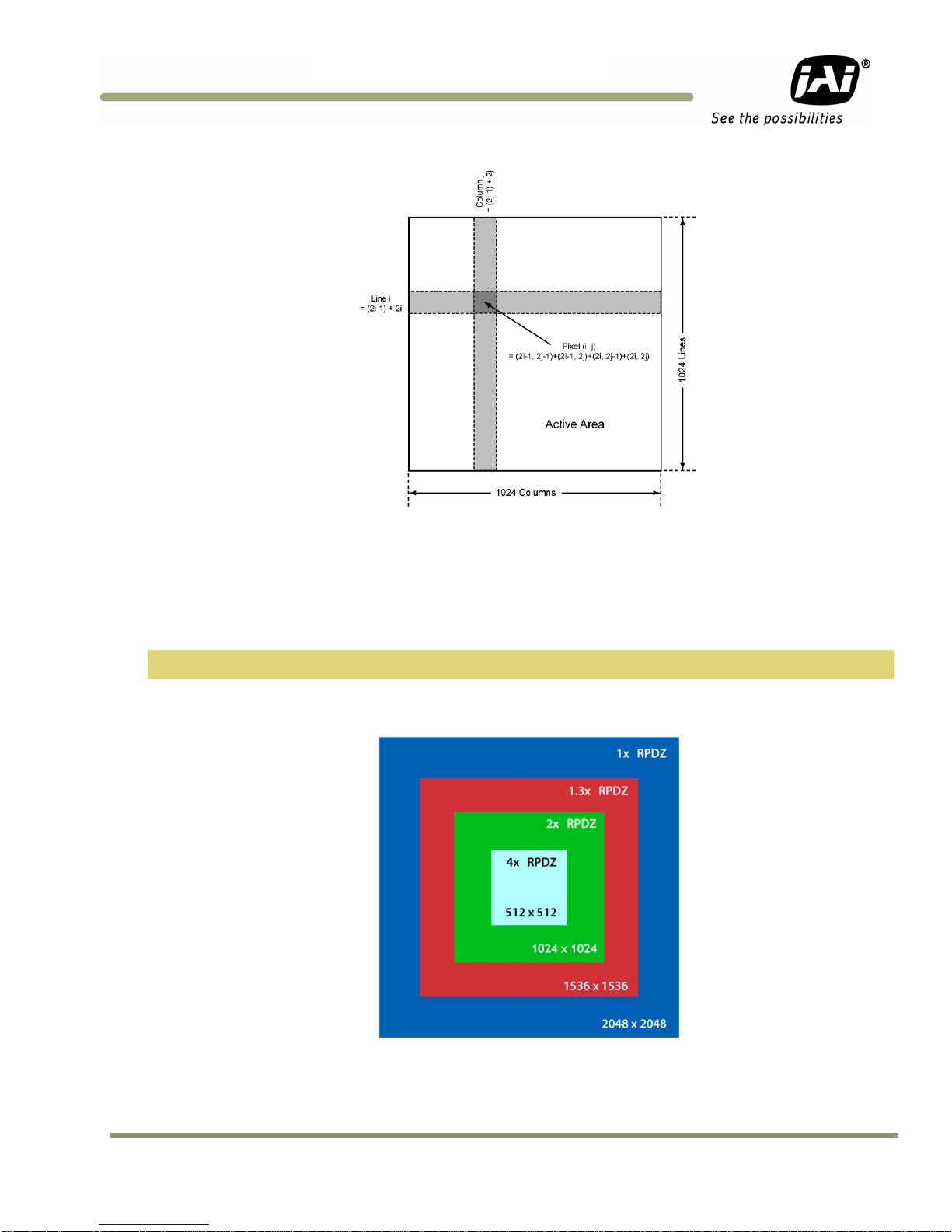
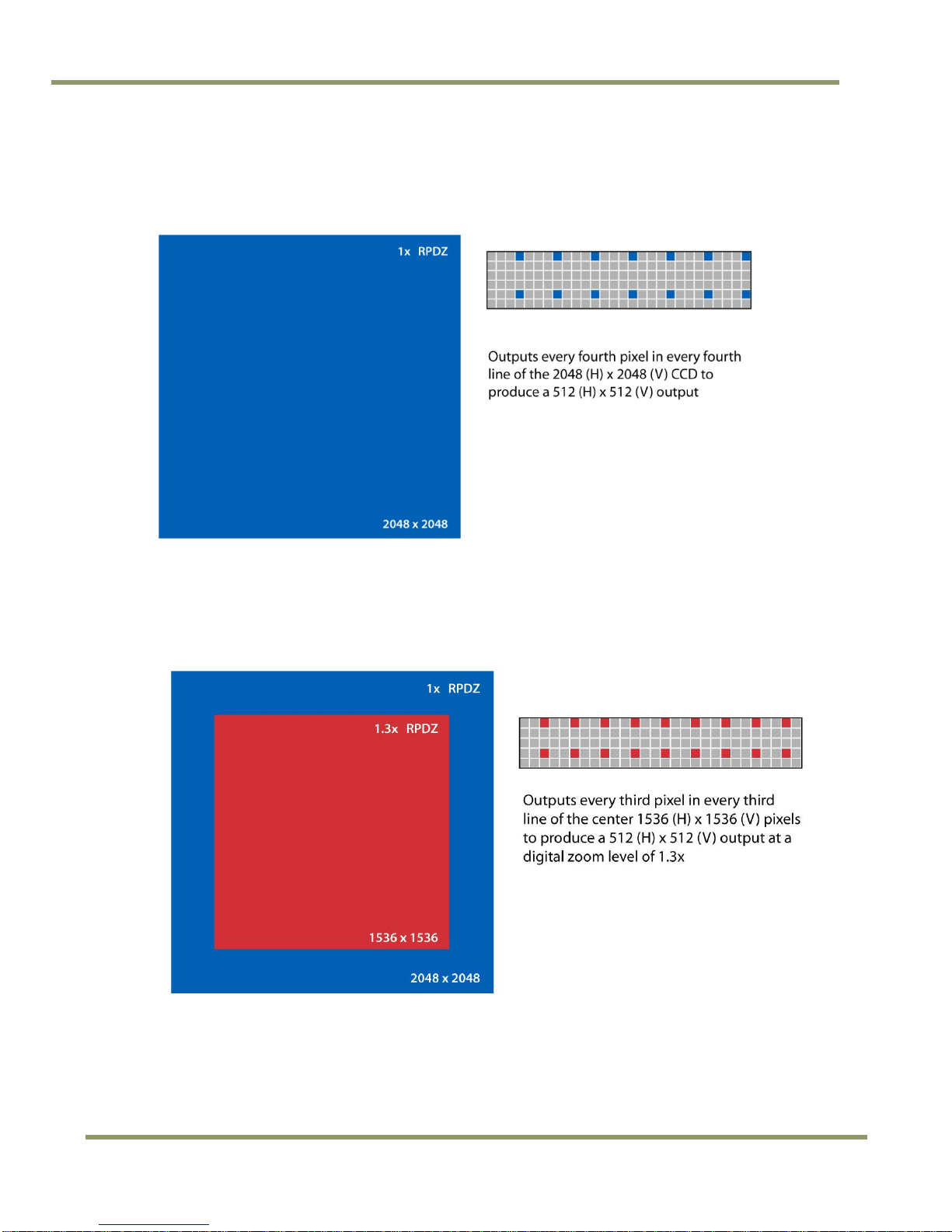
3.1.4 Resolution Proportional Digital Zoom
TM-4200GE has four resolution proportional digital zoom selections: 1x, 1.3x, 2x, and 4x. Resolution
Proportional Digital Zoom (RPDZ) is a patent-pending image post processing algorithm that enables the user to
digitally modify the camera’s field of view while maintaining a constant data rate between the camera and the
host computer. This is accomplished by sub-sampling pixels in the field of view in a manner proportional to the
digital zoom level.
Note: The number of pixels used to create an image in these modes is always 512(H) x 512(V).
Figure 8. Overview of Resolution Proportional Digital Zoom
Operation 17
Page 18
RM/TM-4200GE Series
1x RPDZ
In 1x Mode the output video uses every fourth pixel in every fourth line of the full 2048(H) x 2048(V) CCD to
produce a 512(H) x 512(V) output. The image is effectively 1x digital zoom.
Figure 9. 1x Digital Zoom
1.3x RPDZ
1.3x Mode produces an image that is effectively 1.3x digital zoom.
Figure 10. 1.3x Digital Zoom
18 Operation
Page 19

RM/TM-42
00GE Series
2x RPDZ
2x Mode produces an image that is effectively 2x digital zoom.
Figure 11. 2x Digital Zoom
4x RPDZ
4x Mode produces an image that is effectively 4x digital zoom.
Figure 12. 4x Digital Zoom
Note: The total zoom level will be the optical zoom established by the lens multiplied by the RPDZ mode
settings.
Operation 19
Page 20
Example: A lens that gives a 5x optical field of view in the RPDZ 4x setting will give 20x total magnification.
Example: A lens that gives a 5x optical field of view in the RPDZ 4x setting will give 20x total magnification
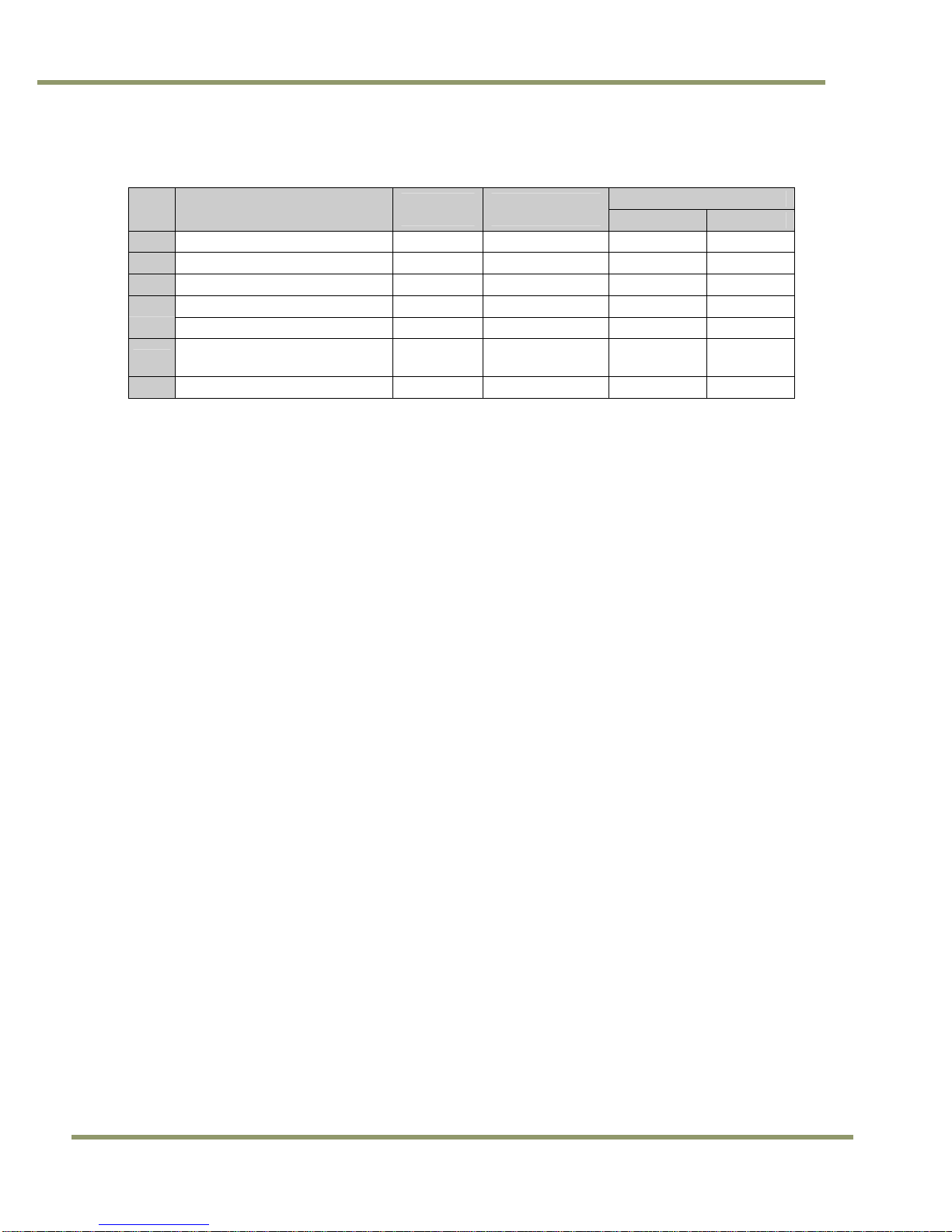
Table 2 Scan Area Start Points.
Scan Area
A Full Scan 1
B Centered 1000Lines 525
C Centered 500Lines 775
D Centered 250Lines 901
T Full Scan 2x2 Binning 1
Resolution Proportional Digital
Z
U Programmable Scan Area 1-2048
Zoom
3.2 Bayer Color Filter (Color Versions)
JAI Inc. AccuPiXEL series color cameras are high-resolution, high-speed progressive scan CCD cameras. The
interline transfer, progressive scan CCD permits full vertical and horizontal resolution of images acquired at
very high shutter speeds. The electronic shutter, which has speeds to 1/16,000 sec., can be reset
asynchronously by external pulse control. Uniform square pixels provide superior image definition in any
orientation. On-chip micro lenses mean increased sensitivity.
RM/TM-4200GE Series
Start Point
(Line)
512 x 512 31.98 20.40
Effective Area
(Lines x Pixels)
2048 x 2048
1000 x 2048
500 x 2048
250 x 2048
1024 x 1024
1-2048 x 2048
Frame Rate (FPS)
Dual Tap Single Tap
14.79 8.04
27.97 15.20
49.63 26.97
79.92 43.43
26.42 15.09
3.2.1 Color Filter Array
JAI Inc. AccuPiXEL cameras use Bayer CFA (color filter array) as their standard primary color filter. This filter
provides the most popular color interpolation supported by numerous software suppliers.
The digital format allows the camera to output accurate pixel data, including the color information. When the
data is stored in the frame buffer of a framegrabber or computer, the color information is easily manipulated
to restore the original color images. Because the color filter array contains only a single R, G or B color in each
pixel, the restored image has to fill in colors in the missing pixel locations. The software uses neighboring pixel
information to “guess” the missing colors to make smooth, clear images. This is called “color interpolation.”
Today’s high-speed computers allow such color interpolation to be done almost in real time. Because these
cameras do not contain internal color processing circuitry, they are smaller and less expensive than fullfunction color cameras.
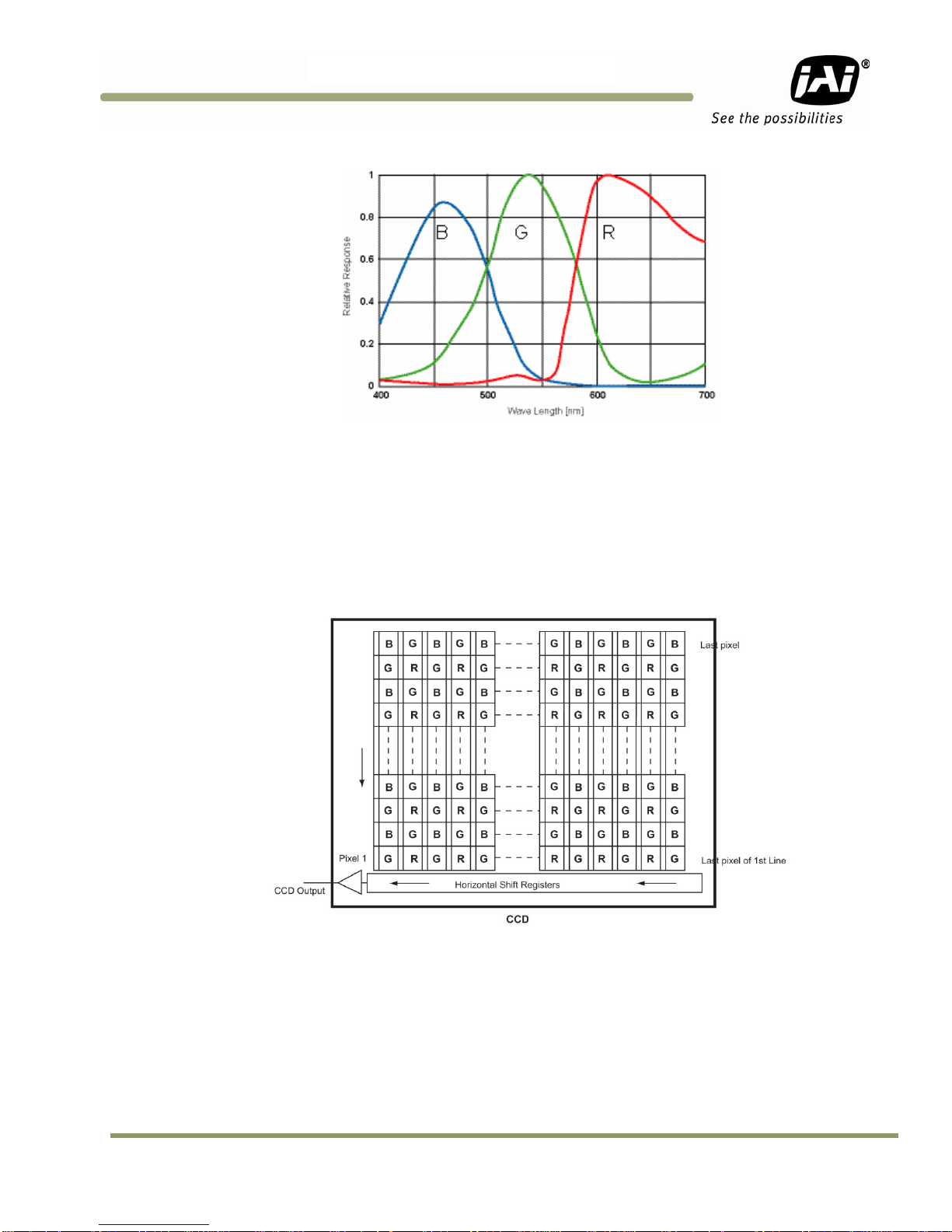
3.2.2 Bayer Color Filter Array (CFA)
The Bayer CFA is an R, G, B primary color filter array. This is the most widely accepted CFA for the single-chip
CCD progressive scan format. This type of array layout has a specific order for each color’s pixels. Since the
human eye’s resolution and color recognition are highest at green, the CFA contains two greens per each red
and blue.
It is critical for the framegrabber and color interpolation to know where the individual color pixels exist
relative to sync (LDV and FDV) timing.
This requirement makes digital output the preferred choice, because the timing relationships are very accurate
20 Operation
Page 21
RM/TM-42
00GE Series
Figure 13. Bayer Color Filter Response
3.2.3 Starting Pixel Configuration
All manufacturers produce identical Bayer CFAs, but there are slight differences between the CCDs produced by
different manufacturers. The first line is generally R and G. The camera timing can be adjusted to start with
either G or R by skipping the very first pixels at each line. The majority of color interpolation software can
select between a variety of pixel relations, such as R/G start or G/R start, as well as G/B start and B/G start.
Once the correct scanning is configured, the rest of the interpolation is exactly the same. Contact JAI Inc. for
further information regarding CCD manufacturers.
Figure 14. Example of Color CCD CFA Pattern
3.2.4 Sync and Data
The individual color data is exactly the same as the pixel data. This means that the timing relationships of the
color cameras are also the same as of the monochrome cameras.
For a detailed timing chart, please refer to each monochrome camera’s data sheet and manual.
The following diagram is an example of the TMC-4200GE default mode. FDV and LDV are used internally for the
GigE interface.
Operation 21
Page 22

RM/TM-4200GE Series
Figure 15. Example of TMC-4200GE in Default Mode.
3.2.5 Camera Functions
AccuPiXEL color cameras perform all functions the same way as monochrome cameras. However, because of
color characteristics, the LUT (Look-up Table) is different. The LUT is a powerful tool to adjust the dynamic
range, as well as the color dynamic range. Since human color perception is non-linear, LUT selection can help
optimize color contrast by selecting the LUT value. Gamma 0.45 is logarithmic and is close to human
perception.
When LUT is selected, black-level adjustment must be more accurate than for monochrome cameras.
22 Operation
Page 23

RM/TM-42
00GE Series
3.2.6 Interpolation Software
The color interpolation can be performed in the framegrabber or by using the host computer’s CPU. Most major
framegrabbers with processing capability provide tools for color interpolation. Software vision packages also
provide color interpolation capability, but speed and performance may be determined by the PC’s resources
and by the complexity of the interpolation routine.
3.2.7 Color Interpolation
The Bayer pattern color filter array (CFA) consists of R, G, and B primary colors. Each pixel represents one of
three colors. In order to display or print color images, the signal has to be converted to RGB output, which has
three independent channels (outputs) and sync signals.
Color interpolation software or firmware performs the color preprocessing by filling
the missing color pixels with neighboring pixels. It then separates the stream of data,
(8-bit or 10-bit) into 3 (RGB) data (8-bit x 3) and adds the color matrix to adjust and
balance each of the R,G, and B channels (white balance or color balance).
The image quality depends on the camera’s own pixel data (including pixel data
independency from neighboring pixels, noise and color filter), and interpolation of
the software algorithm such as 3 x 3 interpolation, 2 x 2 interpolation, color matrix,
white balance capability, and so on.
All AccuPiXEL color cameras are carefully designed for maximum color performance. JAI Inc. strongly suggests
that you use digital output for the best performance.
Some software is used on board (FPGA or DSP) to perform the interpolation. Other software simply uses the
host computer’s memory and CPU. The processing speed may vary depending on the architecture and speed of
the computer.
3.3 Electronic Shutter
The TM-4200GE has a substrate drain-type shutter mechanism which provides a superb picture at various speeds
without smearing.
3.3.1 Preset Shutter
Table 3 Electronic Preset Shutter
Shutter Speed
0 No shutter
1 1/60 1/16000
2 1/125 1/8000
3 1/250 1/4000
4 1/500 1/2000
5 1/1000 1/1000
6 1/2000 1/500
7 1/4000 1/250
8 1/8000 1/125
9 1/16000
3.3.2 Programmable Exposure-Continuous Mode
The exposure time of TM/TMC-4200GE can be specified from one video line to a maximum of one frame using
the serial communication commands in the Continuous Mode. There is overhead where the specified exposure
time is n video lines, making the real exposure time equal to
Continuous
Mode (sec)
Dual Tap
Async Mode
(sec)
No shutter
PWC
Continuous
Mode (sec)
No shutter
1/35
1/70
1/140
1/280
1/560
1/1120
1/2250
1/4500
1/9000
Single Tap
Async Mode
(sec)
No shutter
1/9000
1/4500
1/2250
1/1120
1/560
1/280
1/140
1/70
PWC
Operation 23
Page 24

RM/TM-4200GE Series
When n=0, the exposure time is the minimum exposure time. It is equal to:
In this mode the maximum exposure time is equal to the setting for one frame. If the user specified exposure
time is longer than the time allowed for one frame, it will be ignored by the camera.
3.3.3 Asynchronous No Shutter Mode
In Asynchronous No Shutter Mode, applying the external trigger starts a camera scan reset. The camera finishes
the line it is scanning and scans an additional 9 video lines, this charge is sent to the horizontal register.
Because the external trigger is randomly applied, the new image charge may overlap with the previous image.
To prevent an existing charge accumulation from interfering with a new image, most users set up the
application in a dark area and depend on a strobe light for illumination. From the time the external trigger
activates until the transfer gate turns off, about 9.5 video lines are available for integration; if everything is
properly configured, the strobe flashes during this time.
Figure 16. External Trigger Timing.
24 Operation
Page 25

RM/TM-42
00GE Series
3.3.4 Asynchronous Programmable Exposure Mode
In Asynchronous Programmable Exposure Mode, when an external trigger is applied, the exposure starts after
one discharge signal (Vsub), which happens after the trigger’s active edge is off. Because the discharge signal
(Vsub) synchronizes with LDV in this mode, there is a maximum one video line of jitter between the trigger
active edges to discharge signals (Vsub) off. In this mode, the exposure time from 0 video line to 2079 video
lines can be controlled via software in one video line steps. In this mode, the minimum exposure time is equal
to 0 video line plus overhead: the maximum exposure time is equal to 2079 video lines plus overhead. Where
the specified exposure time is n video lines, the real exposure time is equal to:
• If the exposure time is less than one frame time, the maximum trigger frequency is equal to 1/1 frame
time.
• If the exposure time is longer than one frame time, the maximum trigger frequency is equal to 1/
exposure time.
• The minimum active period of the external trigger is 5 µ s.
Figure 17. Asynchronous Programmable External Trigger
Operation 25
Page 26

RM/TM-4200GE Series
3.3.5 Pulse Width Control Mode
In Pulse Width Control (PWC) Mode, the exposure time is controlled by the external trigger. When an external
trigger is applied, one discharge signal (Vsub) is generated right after the active edge of the trigger. The
exposure starts when the discharge signal is in the off state. The exposure ends following the trigger active off.
Exposure time is controlled by the pulse width of the external trigger. Because the CCD requires some overhead
from trigger-active-off to the transfer gate event, the actual exposure time is equal to:
Exposure Time = Pulse Width + 20.6 µs
Since one discharge signal (Vsub) is generated right after the active edge of the trigger, it is asynchronous with
LDV, and the discharge signal may happen during an active video transfer period, causing visible reset noise to
show in the current image. To avoid reset noise, the maximum trigger frequency in PWC mode should be less
than 1/ (exposure time + one frame transferring time).
The minimum active period of the external trigger is 5µs. Theoretically, the maximum active period of the
external trigger is unlimited. But, due to the usability of images at 25
the external trigger be no longer than one second.
Figure 18. Pulse Width Control Trigger
o
C it is recommended the active period of
3.3.6 Particle Imaging Velocimetry Fixed Exposure Mode
In Particle Imaging Velocimetry (PIV) Fixed Exposure Mode, when an external trigger is applied, the first time
exposure starts the same as in PWC mode. It lasts a very short period (8μs). The second time exposure starts
during the transferring time of the first image. The second time exposure continues until the first image
transfers completely. The second image is transferred after the second exposure. There is a short period
(500ns) between the first exposure and the second exposure. In order to keep two exposure periods constant,
the LDV is reset before the first image is transferred out.
The maximum trigger frequency in this mode is equal to 1/ (transfer time of two frames + 4μs). The minimum
active period of the external trigger is 5μs
26 Operation
Page 27

RM/TM-42
00GE Series
Figure 19. PIV Exposure Timing Table
3.3.7 PWC PIV Mode
The PWC PIV mode is based on PIV Fixed Exposure. In this mode, the first time exposure is controlled by the
pulse width of the external trigger, which is similar to PWC mode. The real exposure time of the first image is
equal to the pulse width of the external trigger.
The maximum trigger frequency in this mode is equal to 1/ (transfer time of two frames + exposure time of the
first image).
The minimum active period of the external trigger is 10 pixel clocks (250ns)
Figure 20. PWC PIV Timing Table.
Operation 27
Page 28

Table 4 Asynchronous Mode Chart
Asyn No Shutter Async Preset and Prog. Shutter PWC
aA <1 line <1 line
aB 9.5 line (n+1) lines + 1024 clk
aC
PIV Fixe Expo PIV PWC Unit
pA 6 6
pB 200 200
pC 160 160
pD 320 320
pE 20 20
pF 1 1
3.4 Dynamic Range Control
Figure 21. Output and Blooming
RM/TM-4200GE Series
6 clk
Pulse width + 1024 clk
1024 clk
Pixel
Frame
The typical interline transfer CCD has fixed noise levels based on dark current (thermal or KT noise), pattern
noise, and the operating clock speed. In general, the level of the 20 MHz pixel clock CCD at room temperature
is around 20 to 50 electrons. The maximum capacity of CCD charges is limited by the well capacity at
saturation. The range is limited by the structure and the pixel size.
The TM-4200GE uses a CCD with 7.4 µm x 7.4 µm pixels and a two-phase vertical shift register structure. The
well capacity is 40,000 electrons. The theoretical dynamic range is 40,000:30 = 1333:1 (60 dB).
A typical CCD camera does not use the full dynamic range due to the nominal gain and the output specification
such as RS-170. The typical CCD camera’s gain is set at 16 to 22 dB and the RS-170 video level is 714 mV. Using
20 dB gain for the calculation, CCD output is limited to 714/10 = 71.4 mV. Since the CCD’s saturation voltage is
400 mV to 500 mV, it uses less than 1/5 of the full dynamic range.
Machine vision and outdoor applications cannot afford to miss image information behind the saturation, which
is why the dynamic range adaptation is critical.
3.4.1 Programmable Look-Up Table (LUT) and Knee Control
The TM-4200GE has a built-in LUT (look-up table) for dynamic range control.
28 Operation
Page 29

RM/TM-42
00GE Series
D U T Z
50
84
80 80 40 80
50
83
At a specific gain setting, the offset (minimum level.... dark point) and A/D reference top voltage (maximum
level... saturation point) are set to 12-bit A/D input so that the full dynamic range of the CCD is utilized at 12bit references as the input and the LUT output is converted into either 8-bit or 10- bit to adjust the gamma
correction. There is no 12-bit LUT.
The look-up table has two knee points (variable gamma selection) that allow the 10-bit input to be segmented
into three regions. The look-up table selection can be made by knee curve direct input.
3.5 External Sync and Pixel Locking
The TM-4200GE accepts an external sync of standard HD and VD at TTL level for general locking to a system
sync and clock. The frequency requirement is as follows:
Full Progressive Scan:
fHD = 30.769 KHz ± 2%
fVD = 14.79 Hz ± 2%
(Internal Master clock = 80.00 MHz,
Pixel clock = 40.00 MHz)
100L Partial Scan:
fHD = 30.769 KHz ± 2%
fVD = 27.97 Hz ± 2%
500L Partial Scan:
fHD = 30.769 KHz ± 2%
fVD = 49.63 Hz ± 2%
250L Partial Scan:
fHD = 30.769 KHz ± 2%
fVD = 79.92 Hz ± 2%
3.6 Camera Timing Charts
Table 5 TM-4200GE Timing table
Timing Scan Mode
A B C
tA dual 1300 1300 1300 1300 1300 728
single 2392 2393 2392 2393 2393 1274
tB dual 1024 1024 1024 1024 1024 512
single 2048 2048 2048 2048 2048 1024
tC dual 276 276 276
single 344 344 344
tD dual 176 176 176
single 176 176 176
tE dual 100 100 100
single 168 168 168
tF 80 80 80
tG 224 224 224
tH A, B, C, D, U and Z: n*tA + 822 (n=1, 2, 3, …)
T: n*tA = 411 (n=1, 2, 3, …)
tJ dual 100 100 100
single 166 166 166
276
344
176
176
100
168
224
100
166
276
344
176
176
100
168
224
100
166
216
250
166
166
112
Unit
1924 Unit
3016
256
512
1668
2504
800
800
868
1704
224
868
1702
Pixel Clock
Pixel Clock
Video Line
Operation 29
Page 30

RM/TM-4200GE Series
D U T Z
50
76 76
78 78
16
tH
61
8
61
8
71
5
Timing Scan Mode
A B C
tK 100 100 100
tL dual 76 76 76
single 78 78 78
tM 2048 2048 2048 2048 2048 1024
tN 2080 1100 620
tP 2048 1000 500
tQ 32 100 120
tR
tS
tT
tU dual 16 50 58
single 16 50 58
tV 3
tW dual 13 47 59
single x1: 91
100
385
250
135
tU-3
tW+6
100
116
117
1040
1024
100
700
702
512
650
512
138
x1: 67
x2: 46
x3: 25
x4: 4
x1: 44
x2: 30
x3: 17
x4: 4
x1: 68
x2: 89
x3: 113
x4: 131
x2: 105
x3: 118
x4: 131
Unit
Figure 22. Camera Timing Chart
30 Operation
Page 31

RM/TM-42
00GE Series
D E K L
32
Figure 23. Digital Data Output Order for Configuration
Figure 24. Field Video Timing--Continuous Mode
Table 6 Video Output
Scan
Area
A
B 1100
C 620
D 385
Data
Clock
40MHz
25 ns
A B C
1300 276 1024 0 0
Operation 31
Horizontal (pixels)
2080
Vertical (lines)
M N O
2048
100
120
135
1000
500
250
0 0
Page 32

s9
33
Scan
Area
RM/TM-4200GE Series
Table 7 External HD Locking and External VD Reset
External HD Locking Timing
(pixels)
eA eB eC eD eE
Vertical
Freq.
(Hz)
Pixel
Clock
Horizontal
Freq.
(kHz)
Time
(μsec)
Time
(msec)
Vertical VD Reset Timing
(lines)
eF eG eH eI eJ
A
B 27.7 35.75
40MHz
C 49.63 20.15
D 79.92 12.51
30.77 32.5 <20ns 1300 100 1200
25ns
14.79
0
67.6
Table 8 Async Reset
Scan
Area
A
B
C
D
Note: s1=1
aA
(lines)
>1 &
<2
s2=3
s3=7
s4=15
s5=30
s6=61
s7=122
s8=245
s9=PW
aB
(μsec)
aC aD aE
s1-8:
<1 line
s9:
<125ns
Async Reset Timing
aF
(μsec)
aG
(lines)
aH (lines)
s1-8
101
121
136
>aH
&
<aH
+1
2080
1100 1091
<2
620 611
385 376
aI
(lines
>aH +
1 &
<aH
+2
9
aJ
(sec)
(lines)
<1 <2
2071
1
aK
32 Operation
Page 33

RM/TM-42
00GE Series
4 Functions & Operations
4.1 GigE Vision Standard Interface
The TM-4200GE series cameras are designed in accordance with the GigE Vision standard. Digital images are
transmitted over Cat5e or Cat6 Ethernet cables. All camera functions are also controlled via the GigE Vision
interface.
The camera can operate in continuous mode, providing an endless stream of images. For capturing individual
images, related to a specific event, the camera can also be triggered. For precise triggering, it is recommended
to use a hardware trigger applied to the Hirose 12-pin connector. It is also possible to initiate a software
trigger through the GigE Vision interface. However, when using a software trigger, certain latency inherent to
the GigE interface must be anticipated. This latency, that manifests itself as jitter, greatly depends on the
general conditions and traffic on the GigE connection. The frame rate described in this manual is for the ideal
case and may deteriorate depending on conditions.
When using multiple cameras (going through a switch and/or a single path) or when operating in a system with
limited transmission bandwidth the Delayed Readout Mode and Inter-Packet Delay functions can be useful.
4.2 GigE Vision-Aware Software
A GigE Vision camera can be controlled by any software that understands the protocol. At JAI we provide the
JAI GigE Vision SDK and Control Tool to interface with our cameras. The remainder of the manual will show
screenshots of the JAI Control Tool but other 3rd party software will provide similar functionalities.
4.3 Recommended Network Configurations
Although the TM-4200GE series cameras conform to Gigabit Ethernet (IEEE 802.3) not all combinations of
network interface cards (NICs) and switches/routers are suitable for use with the GigE Vision compliant
camera.
4.3.1 Verified Network Interface Cards (NICs)
At the time of publishing this document these combinations have been verified:
NIC: Intel Pro/1000MT, Pro/1000GT, Pro/1000PT.
CPU: Intel Core 2 Duo 1.84Ghz.
Memory: 2 GB
Video Card: video card on PCI Express bus with at least 256MB of VRAM.
Functions such as screen saver and power save should not be used. Unnecessary applications such as Word,
Excel or others should not be used.
4.3.2 Video data rate (network bandwidth)
The video bit rate for TM-4200GE series cameras at the continuous mode and full scan area (2048x2048) is:
Model Pixel Type Frame Rate
Mono8 15 fps
Mono10 15 fps 1.02 Gbit/s
TM-4200GE
TMC-4200GE
Mono10Packed 15 fps 765.2 Mbit/s
Mono12 15 fps 1.02 Gbit/s
Mono12Packed 15 fps 765.2 Mbit/s
BayerGR8 15 fps
BayerGR10 15 fps 1.02 Gbit/s
BayerGR12 15 fps 1.02 Gbit/s
Packet data volume
(GevSCPSPacketSize of 4040)
510.1 Mbit/s
498 Mbit/s
Functions & Operations 33
Page 34

RM/TM-4200GE Series
Note: The Mono10, Mono12, BayerGR10, and BayerGR12 settings at full frame rate will exceed GigE bandwidth.
It is recommended to use Mono8, BayerGR8, Mono10Packed or Mono12Packed for max frame rate.
For TM-4200GE series cameras, the jumbo frame can be set at maximum 16260 Bytes (Factory setting is 1428
Bytes). To set Jumbo Frames, refer to section 4.3.4.
To ensure the integrity of packets transmitted from the camera it is recommended to follow these simple
guidelines:
Whenever possible use a peer-to-peer network.
When connecting several cameras going though a network switch, make sure it is capable of handling jumbo
packets and that it has sufficient memory capacity.
Configure inter-packet delay to avoid congestion in network switches.
Disable screen saver and power save functions on computers.
Use high performance computers with multi-CPU, hyper-thread and 64-bit CPU, etc.
Only use Gigabit Ethernet equipment and components together with the camera.
Use at least Cat5e or preferably Cat6 Ethernet cables.
Whenever possible, limit the camera output to Mono8, Mono10Packed or Mono12Packed for Monochrome
cameras, and BayerGR8 for color.
4.3.3 Disable Firewalls
To ensure proper operation of the JAI SDK & Control Tool, all firewalls must be disabled. This also includes the
Windows firewall.
Click [Start], [Control Panel] for accessing the Windows
firewall configuration.
4.3.4 Enabling Jumbo Frames
(1) Click [Start] and click [Control Panel].
(2) Click [Performance and Maintenance].
(3) Click [System].
(4) Click [Hardware] tab.
(5) Click [Device Manager]
34 Functions & Operations
Page 35

RM/TM-42
00GE Series
(6) Expand [Network adapters].
(7) Select target NIC, right-click, and click [Properties].
Note: The following procedure uses the Intel® PRO/1000 as an example. If a different NIC is used, the setup
tabs will likely be different. In that case, set the item in a manner similar to what is described here.
(8)Click [Advanced] tab.
Functions & Operations 35
Page 36

RM/TM-4200GE Series
(9) Select Jumbo Frames under Property, and select the desired Value. This setting defines the maximum
GevSCPS Packet Size the camera can use.
(10)Click [OK].
(11)Close [Device Manager].
(12)Close [System Properties] clicking [OK].
4.3.5 Setting Receive Descriptors
If the Network Connection Properties list contains a property
called Receive Descriptors, then change its property to the
maximum value supported by the NIC installed in the computer.
Click “OK“ to save the property.
36 Functions & Operations
Page 37

RM/TM-42
00GE Series
4.3.6 Interrupt Moderation rate
If the Network Connection Properties list contains a property
called Interrupt Moderation Rate, then it is possible to set the
preferred value. When it is changed from Minimal, M High and
Extreme, number of interruption is decreased to get better
performance. Set it to “Extreme.”
Click “OK“ to save the property.
4.3.7 Calculating and setting Inter-Packet Delay
When connecting several cameras to one network interface card via a switching hub, it is important to optimize
the Inter-Packet Delay of the cameras to avoid congestion in the switch. A sure sign of congestion is the loss of
packets.
Since increasing the inter-packet delay also adds overhead to the data transfer it is important to calculate the
optimal setting in order to make best use of the video bandwidth.
JAI Control Tool has a built in wizard for calculating Inter-Packet Delay. When the Inter-Packet Delay function
is activated, a button appears on the right hand side of the bar. Click the button to open the calculation wizard
window.
Functions & Operations 37
Page 38

RM/TM-4200GE Series
At first, type in the frame rate of the connected camera.
TM-4200GE series cameras are 15 fps.
Set the bandwidth at 80%.
Click the calculation tab.
New value is calculated.
Click OK. This shown value is automatically transferred
to the Packet Delay column of the Control Tool.
4.3.8 Confirm the Filter Driver is used
The filter driver is installed as an optional function when JAI SDK is installed. If the filter driver is not installed
at that time, it can be installed from All Programs ֜ JAI SDK ֜ GigE Vision Filter Driver ֜ Install GigE Vision
Filter Driver.
If the Filter Driver is installed properly, the Camera Control Tool indicates “ Driver Type Filter Driver “ in the
Network Interface.
38 Functions & Operations
Page 39

RM/TM-42
00GE Series
If it is not shown, confirm the setting in the “Settings” window. Access the “Settings” window by clicking on
the icon to the left of the blue question mark icon.
Functions & Operations 39
Page 40

5 Configuring the Camera
The following sections describe the various features of the camera.
5.1 Acquisition and Trigger Controls
These controls affect exposure mode, exposure time, and image acquisition operations.
Figure 25. Acquisition And Trigger Controls Category
RM/TM-4200GE Series
AcquisitionMode: controls how the camera behaves during image acquisition.
The possible options are:
• Continuous: Images will be acquired continuously.
• SingleFrame: A single image will be acquired.
• MultiFrame: the camera acquires the number of images as specified by AcquisitionFrameCount feature
(see below).
• ContinuousRecording: The camera will continuously acquire and store images onto the onboard memory.
Acquisition is stopped when the onboard memory capacity is reached. Images can be read from the
camera using either ContinuousReadout or SingleFrameReadout.
• ContinuousReadout: Images will be read continuously from the camera’s onboard memory. When no more
images are available, timeouts will occur.
• SingleFrameRecording: Acquire a single image and store onto the onboard memory. Images can be read
from the camera using SingleFrameReadout.
• SingleFrameReadout: A single image will be read from the onboard memory. If no frames are available, a
timeout will occur.
AcquisitionStart: tells the camera to start acquiring images in the mode as specified by AcquisitionMode.
AcquisitionStop: tells the camera to stop acquiring images.
AcquisitionFrameCount: specifies the number of frames to be acquired in the MultiFrame Acquisition mode.
Valid range is from 1 to 255.
40 Configuring the Camera
Page 41

RM/TM-42
00GE Series
ExposureMode: specifies mode of operation for the exposure control (or shutter). All Async modes, and
PulseWidthControl require a trigger signal. The possible options are:
• Off: No shutter.
• ContinuousPreset1
• …
• ContinuousPreset9
• ContinuousProgrammable: Puts the camera into ContinuousProgrammable mode and enable
ContinuousProgrammable value feature below.
• AsyncNoShutter: this mode is meant to be used in a dark environment in conjunction with strobe light.
This setting and all settings below require a trigger signal.
• AsyncPreset1
• …
• AsyncPreset8
• PulseWidthControl
• AsyncProgrammable: Puts the camera into AsyncProgrammable mode and enables the AsyncProgrammable
value feature below.
Note: see “TABLE 3. Electronic Preset Shutter” in Section 3.3.1 for shutter time of the Preset modes.
ContinuousProgrammable: user defined shutter time in unit of scan lines. Available only when ExposureMode is
in ContinuousProgrammable.
AsyncProgrammable: user defined shutter time in unit of scan lines. Available only when ExposureMode is in
AsyncProgrammable. Requires trigger signal.
TriggerPolarity: this feature selects which signal state, high or low, of the trigger signal will initiate an image
capture for triggered ExposureModes.
5.2 AnalogControls
These controls allow you to make adjustment to image intensities (Gain), Black Level, and channel balancing.
The camera image sensor is read out via two channels called Taps. Each channel’s Gain, and Black Level can be
independently adjusted.
Figure 26. AnalogControls Category
Configuring the Camera 41
Page 42

GainSelector: select the video channel that GainRaw will affect.
Available choices:
• All: entire image.
• Tap2: right channel.
GainRaw: controls the Gain value.
GainAutoBalance: use this feature to balance the left and right channel’s Gain values. Make sure the camera is
pointing at a uniform light source. The balance is done once and may be repeated if needed. This process may
take a long time (~3min).
BlackLevelSelector: select the video channel that BlackLevelRaw will affect.
Available choices:
• All: entire image.
• Tap2: right channel.
BlackLevelAutoBalance: use this feature to continuously auto balance the channels’ Black Level.
5.3 Image Size Controls
These controls allow you to make adjustment to the image’s size, scan mode, and tap selection. Please see
section 3.1 for a table of possible image sizes and modes.
Figure 27. ImageSizeControl category
RM/TM-4200GE Series
SensorDigitizationTaps: the camera can be configured to read out from the image sensor using either one or
two channels. Possible options:
One: Single Tap. This mode will use one channel to read out images. The image will have a uniform intensity
but results in slower frame rate.
Two: Dual Tap. This mode uses two channels to read out images. Since two different electronic channels are
used, the image needs to be balanced by using GainAutobalance and BlackLevelAutobalance. Use this mode to
achieve 15fps.
WidthMax: shows the current valid maximum value for Width.
42 Configuring the Camera
Page 43

RM/TM-42
00GE Series
HeightMax: shows the current valid maximum value for Height.
Width: sets the width of the output image. When ScanMode is changed it is necessary to set this value to equal
to or less than WidthMax.
Height: sets the height of the output image. When ScanMode is changed it is necessary to set this value to
equal to or less than HeightMax.
OffsetX: specify the offset from the left edge of the image captured by the sensor to be sent out of the
camera. Width must be set lower than WidthMax before this value can be increased.
OffsetY: specify the offset from the top of the image captured by the sensor to be sent out of the camera.
Height must be set lower than HeightMax before this value can be increased.
• Offset Example:
• ScanMode is set to B_2048x1000
• Width to 600 and Height to 100.
• OffsetX can have a range of 0 to 40. OffsetX is then set to 20.
• OffsetY can have a range to 0 to 80. OffsetY is then set to 35.
• The resulting image is of size 600x100 with the upper left pixel offset by 20 pixels horizontally and 35
vertically
Figure 28. Image Output Example
PixelFormat: specifies the image type captured from the image sensor. Available options:
Monochrome:
• Mono8: 8-bit monochrome image.
• Mono10: 10-bit monochrome image with 1 pixel needing 2 bytes.
• Mono10Packed: 10-bit monochrome image with 2 pixels packed into 3 bytes.
• Mono12: 12-bit monochrome image with 1 pixel needing 2 bytes.
• Mono12Packed: 12-bit monochrome image with 2 pixels packed into 3 bytes.
Bayer:
BayerBG patterns are used for Programmable User Scan Area with odd numbered starting row.
• BayerGR8: 8-bit Bayer pattern with Green and Red pixels in first row.
• BayerBG8: 8-bit Bayer pattern with Blue and Green pixels in first row.
• BayerGR10: 10-bit Bayer pattern with Green and Red pixels in first row.
Configuring the Camera 43
Page 44

RM/TM-4200GE Series
• BayerBG10: 10-bit Bayer pattern with Blue and Green pixels in first row.
• BayerGR12: 12-bit Bayer pattern with Green and Red pixels in first row.
• BayerBG12: 12-bit Bayer pattern with Blue and Green pixels in first row.
ScanMode: controls the image size captured by the image sensor. By changing to a smaller size you can achieve
a faster frame rate. After changing ScanMode it is necessary to adjust the Width and Height value to a valid
value. Available options (expressed in unit of Width x Height pixels):
• A_2048x2048
• B_2048x1000
• C_2048x500
• D_2048x250
• UserProgrammable: user programmable scan area via UserScanAreaStart and UserScanAreaLines features.
• Binning2x2
• RPDZoom_4x
• RPDZoom_2x
• RPDZoom_1point3x
• RPDZoom_1x
UserScanAreaStart: sets the starting line of the User Programmable scan area. First line has a value of 0 and
corresponds to the top of the image sensor. For color cameras (TMC/RMC-4200GE) this value changes the Bayer
pattern of the captured image. Sets PixelFormat to BayBG for odd value, and BayerGR for even value.
UserScanAreaLines: sets the number lines for the height of the User Programmable scan area.
TestImageSelector: shows a software generated test pattern. Use this feature for debugging purposes.
Available options are:
• Off: turn off test pattern generator and resume normal operation.
• DeviceSpecific: shows diagonal lines on black background. Generated by the camera’s CPU.
• IPEngineTestPattern: shows horizontal striped gradients running right to left.
5.4 Image Preprocessing
As temperature changes the image sensor can produce defective pixels in images, this feature will attempt to
compensate this phenomenon and produce a cleaner image. Run the White Blemish Calibration before using
Blemish Compensation.
• BlemishCompensation: enables or disables Blemish Compensation.
44 Configuring the Camera
Page 45

RM/TM-42
00GE Series
• WhiteBlemishCalibration: this is done to calibrate the camera so Blemish Compensation can be run. This
is only necessary after a camera has been powered off and restarted. Cover the lens with the lens cap
before calibrating.
5.5 LUT (Look Up Table)
The camera’s Lookup Table is used for dynamic range control when the camera is in 8, or 10-bit output mode.
Figure 29. LookUp Table
LUTMode: controls which LUT table to use. There are 2 predefined tables and 1 user configurable table.
Available options:
• Linear: a linear mapping
• Gamma45: also known as Gamma 0.45.
• Knee: you can specify the curve by controlling two points. The camera will calculate the table base on
the Knee values below.
KneeX1: controls the X value of first Knee point.
KneeY1: controls the Y value of first Knee point.
KneeX2: controls the X value of second Knee point. This value must be greater than KneeX1.
KneeY2: controls the Y value of second Knee point.
KneeSet: after you have changed the values of the knee points click KneeSet to apply the setting. The camera
will take a few seconds to calculate the LUT table. It is recommended to stop image acquisition during this
time.
LUTInversion: invert the current LUT table. This creates the negative of image.
5.6 UserSets
These controls are for saving camera settings to the onboard memory and selection of which setting will be
used during bootup.
Configuring the Camera 45
Page 46

RM/TM-4200GE Series
Figure 30. UserSets Category
UserSetSelector: selects which memory page to load, or save.
Available options:
• Default: contains factory settings.
• UserSet1: contains saved user settings.
UserSetSave: save the camera settings to the currently selected memory page. If Default is selected in
UserSetSelector then UserSetSave is grayed out (Default factory settings won’t be overwritten).
UserSetLoad: load the camera settings from the selected memory page.
UserSetDefaultSelector: chooses which memory page the camera will use as setting during boot up.
5.7 DeviceInformation
Show camera’s general information such as version, model, and serial number.
Figure 31. DeviceInformation Category
DeviceVendorName: shows JAI, Inc.
DevicModelName: shows the camera model name.
DeviceVersion: shows the current camera version.
DeviceID: the device serial ID. This is set at the factory and only available in Expert and Guru visibility modes.
DeviceUserID: User’s modifiable ID. You can enter any character string up to a limit of 16 characters.
46 Configuring the Camera
Page 47

RM/TM-42
00GE Series
5.8 GigEVisionTransportLayer
More advanced controls for setting IP Address, GigE Vision Stream Channel settings, etc…
A complete explanation of GigE is out of the scope of this manual therefore the user should seek out various
online guides about: Persistent/Static IP, DHCP, LLA, IP Address, Subnet Mask, and networking.
5.8.1 Persistent IP
When powered up and connected to the network the camera will use the following sequence to obtain an IP
Address:
1. Persistent IP
2. DHCP: a DHCP server on the network will assign the camera an IP Address.
3. Link-Local Address (LLA): an IP Address in the 169.254.X.X ranged is assigned.
By default only DHCP and LLA are enabled. LLA will always be enabled. To disable DHCP mode set
GevCurrentIPConfigurationDHCP to false.
You can also assign a static IP Address to the camera so the camera will always boot up with this IP Address. To
do so follow these instructions:
1. Set Visibility to at least Expert.
2. Set GevCurrentIPConfigurationPersistenIP to True.
3. Set GevPersistentIPAddress to the IP Address of your choosing. (Ex: 169.254.0.11)
4. Set GevPersistentSubnetMask to the subnet mask of your choosing (Ex: 255.255.0.0)
Subnet Mask must match the device to which the camera is communicating.
5. Set GevPersistentDefaultGateway to the IP Address of your gateway. (Ex: 0.0.0.0)
Figure 32. GigEVisionTransportLayer Persistent IP
Configuring the Camera 47
Page 48

5.8.2 Stream Channel Packet Size
GevSCPSPacketSize: Images are sent via the StreamChannel in GigE Vision terminology. The camera is able to
adjust the size of the data packets sent on this channel. The minimum value of 1428 is required to get images
without dropped packets. It is recommended that a value of 4040 or higher is used. If setting to above 1428,
the network to which the camera is connected must be able to support Jumbo Frames. To change the stream
channel packet size, follow these instructions:
1. Stop image acquisition.
2. Switch Visibility to at least Expert.
3. Set GevSCPSPacketSize to a desired value.
GevHeartbeatTimeout: specifies the current heartbeat timeout in milliseconds. Available only in Guru visibility
mode. The host software must send at least one command to the camera during this period otherwise it loses
control of the camera. This is usually handled by the control tool.
5.9 IPEngine
The camera is sectioned into two logical modules: a camera head and the IPEngine. The camera head contains
the components to capture images, while the IPEngine takes care of interfacing to the outside world and
transmitting captured images. The IPEngine contains the Programmable Logic Controller (PLC) and the Grabber.
The Grabber is responsible for image transmission. All input and output signals pass through the Programmable
Logic Controller (PLC). The PLC contains a Signal Routing Block, Control Bits, and Lookup Table. The PLC also
contains 4 Pulse Generators and 1 general purpose counter. By GenICam naming convention the Pulse
Generators are called Timers. The Counter and Timers are controlled under the CountersAndTimersControls
category, and the other parts are controlled under the IPEngine category.
RM/TM-4200GE Series
48 Configuring the Camera
Page 49

RM/TM-42
00GE Series
Figure 33. PLC LUT Diagram
Note: Ext_VD, EXT_HD, EVINIT and INTG_CON all go the camera head. TTL Output (Strobe) goes outside the
camera via Pin 8 of the 12-Pin cable.
Configuring the Camera 49
Page 50

RM/TM-4200GE Series
Figure 34. PLC
5.9.1 SignalRoutingBlock
The Signal Routing Block is a group of switches that lets you route signals to the PLC Lookup Table. There are a
total of 8 input lines, numbered from I0 to I7. Each input line can accept a number of different signals. The
input signals can be from the camera head, externally from the 12-Pin cable, or the PLC itself.
Figure 35. SignalRoutingBlock
50 Configuring the Camera
Page 51

RM/TM-42
00GE Series
I1 I2 I3 I4 I5
X X X X
X X X
X
X
X
X X X
X
X X
X X X
X X X
X
Here are the possible input signals into the PLC:
Signal Source Signal Name / Input Pin
12 Pin External_Trigger_In_Pin6 External trigger signal.
12 Pin External_VD_In_Pin7
12 Pin External_HD_In_Pin9
12 Pin External_INT_In External Integration Control / Read Out Inhibit signal.
Camera Internal_FDV_Out Frame Data Valid output signal generated by camera head.
Camera Internal_LDV_Out Line Data Valid output signal generated by camera head.
Camera Internal_CAM_STROBE_Out Strobe output signal generated by the camera head.
PLC PLC_ctrl0 True / False (High/Low) switch used for software trigger. (1)
PLC PLC_ctrl2 True / False (High/Low) switch used for software trigger. (1)
PLC PLC_ctrl3 True / False (High/Low) switch used for software trigger. (1)
PLC PLC_Q2 PLC output that can be routed back to the PLC.
PLC PLC_Q3 PLC output that can be routed back to the PLC.
PLC PLC_Q6 PLC output. This signal is also connected to the EXT_VD that
PLC PLC_Q7 PLC output. This signal is also connected to the EXT_HD that
Counter Counter1Gt Counter1’s output signaling when the current count value is
Counter Counter1Eq Counter1’s output signaling when the current count value
Pulse Generator Timer1Out Pulse Generator 1 output signal.
Pulse Generator Timer2Out Pulse Generator 2 output signal.
Pulse Generator Timer3Out Pulse Generator 3 output signal.
Pulse Generator Timer4Out Pulse Generator 4 output signal.
Description
External vertical drive signal.
External horizontal drive signal.
goes to the camera head. Please see the
PLCSpecialConfigurations section below.
goes to the camera head. Please see the
PLCSpecialConfigurations section below.
greater than some user defined value. Please see Counter
section below.
equals to some user defined value. Please see Counter
section below.
Note: (1) There is no PLC_ctr l1.
This table show possible signals each input line can accept (“(D)” specifies factory defaults):
Signal Name / Input Pin I0
External_Trigger_In_Pin6 X(D) X
External_VD_In_Pin7 X
External_HD_In_Pin9 X
External_INT_In
Internal_FDV_Out X
Internal_LDV_Out X
Internal_CAM_STROBE_Out X
PLC_ctrl0 X
Configuring the Camera 51
X(D) X
X(D)
X(D)
X(D)
I6 I7
X X
X X
X
X X
X
X X
X
Page 52

RM/TM-4200GE Series
X X
X X X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
PLC_ctrl2 X
PLC_ctrl3
PLC_Q2 X
PLC_Q3
PLC_Q6 X
PLC_Q7 X X X X
Counter1Gt
Counter1Eq
Timer1Out X
Timer2Out X
Timer3Out
Timer4Out
5.9.2 ControlBits
There are 3 Control Bits: PLC_ctrl0, PLC_ctrl2, and PLC_ctrl3. Note that PLC_ctrl1 is not available. The control
bits can be used as software triggers by toggling between two states: True and False. True sets the signal High,
while False sets the signal to Low.
When a bit is toggled on the host software, a Write Register command is sent to the camera. The arrival time
of the packet depends on current network traffic therefore is varied. These are recommended for testing
purposes. For more precise trigger usage please use an external input trigger signal thru the 12-Pin connector.
For a constant periodic trigger signal please use the Pulse Generators (Timers).
X(D)
X
X
X
X
X
X
X(D)
X(D)
X
X
Figure 36. ControlBits
5.9.3 PLC LookupTable
The PLC Lookup Table lets you connect any input signal I0-I7 to any Lookup Table output signal Q0-Q17. You
can manipulate your inputs using simple or complex Boolean operations. Each Q output results from the
Boolean operations of 4 input variables and 3 Boolean operators.
52 Configuring the Camera
Page 53

RM/TM-42
00GE Series
Figure 37. PLC Q Output
The Q output allows the following Boolean operations:
• Variable0 Op0 Variable1 Op1 Variable2 Op2 Variable3
• (Variable0 Op0 Variable1) Op1 Variable2 Op2 Variable3
• Variable0 Op0 Variable1 Op1 (Variable2 Op2 Variable3)
• (Variable0 Op0 Variable1) Op1 (Variable2 Op2 Variable3)
All Q# controls follow this format:
• PLC_Q#_Variable0: the first input signal.
• PLC_Q#_Operator0: a Boolean operator.
• PLC_Q#_Variable1: the second input signal.
• PLC_Q#_Operator1: a Boolean operator.
• PLC_Q#_Variable2: the third input signal.
• PLC_Q#_Operator2: a Boolean operator.
• PLC_Q#_Variable3: the fourth input signal.
Each Variable has this selection:
• Zero: low signal.
• One: high signal.
• PLC_I0
• …
Configuring the Camera 53
Page 54

RM/TM-4200GE Series
• PLC_I7
• PLC_I0_Not: a Not operation is applied to the signal.
• …
• PLC_I7_Not: a Not operation is applied to the signal.
Operator0 and Operator2 can have the following Boolean operations:
• And
• Or
• Xor
• AndParenthesis: creates a “(Variable0 & Variable1)”, or “(Variable2 & Variable3)” operation.
• OrParenthesis: creates a “(Variable0 | Variable1)”, or “(Variable2 | Variable3)” operation.
• XorParenthesis: creates a “(Variable0 XOR Variable1)”, or “(Variable2 XOR Variable3)” operation.
Operator1 can have the following Boolean operations:
• And
• Or
• Xor
5.9.4 PLCSpecialConfigurations
Switch Visibility mode to at least Expert to get access to these controls. There are two controls of interest in
this category: PLC_Q6_Configuration and PLC_Q7_Configuration. These two controls affect which signal source
the EXT_VD and EXT_HD come from.
PLC_Q6_Configuration: affects the EXT_VD signal.
• Set to Zero to get the signal from the PLC_Q6 output.
• Set to One to bypass the PLC LUT and get the signal directly from external 12-Pin cable.
PLC_Q7_Configuration: affects the EXT_HD signal.
• Set to Zero to get the signal from the PLC_Q7 output.
• Set to One to bypass the PLC LUT and get the signal directly from external 12-Pin cable.
Note: If the EXT_VD and EXT_HD are not being used set PLC_Q6_Configuration and PLC_Q7_Configuration to
Zero to prevent spurious signals. Improper setting can result in black lines across captured images.
54 Configuring the Camera
Page 55

RM/TM-42
00GE Series
Figure 38. PLC Special Configurations
Figure 39. CountersAndTimersControls
Configuring the Camera 55
Page 56

RM/TM-4200GE Series
5.9.5 Counters
The General Purpose Counter lets you maintain a count between 0 and 232-1 (long integer). You can use
different inputs to increment, decrement, or clear the counter value.
The General Purpose Counter outputs two separate signals that indicate when the count is equal to and greater
than the compare value that you set: Counter1Gt and Counter1Eq. These signals are available on the Input lines
in the Signal Routing Block.
CounterSelector: selects which counter to configure. There is only 1 counter called Counter1.
CounterDecrementEventSource: selects the events that will decrement the counter. This signal comes from the
Q16 pin of the PLC LUT.
Available options:
• Off: no decrement events
• PLC_Q16_RisingEdge: decrement when the signal goes from Low to High
• PLC_Q16_FallingEdge: decrement when the signal goes from High to Low.
• PLC_Q16_AnyEdge: decrement on any Falling or Rising Edge.
• PLC_Q16_LevelHigh: decrement when the signal is at the High section.
• PLC_Q16_LevelLow: decrement when the signal is at the Low section.
CounterDuration: sets the value that the CounterValue will be compared to. When the CounterValue and
CounterDuration are equal, the Counter1Eq signal will go high and stay high as long as the values are equal.
When the CounterValue is greater than CounterDuration, the Counter1Gt signal will go high.
CounterEventSource: selects the signal event type that will increment the counter. This signal comes from the
Q17 pin of the PLC LUT.
Available options:
• Off: no increment events
• PLC_Q17_RisingEdge: increment when the signal goes from Low to High
• PLC_Q17_FallingEdge: increment when the signal goes from High to Low.
• PLC_Q17_AnyEdge: increment on any Falling or Rising Edge.
• PLC_Q17_LevelHigh: increment when the signal is at the High section.
56 Configuring the Camera
Page 57

RM/TM-42
00GE Series
• PLC_Q17_LevelLow: increment when the signal is at the Low section.
CounterResetActivation: select the signal event type that will reset the counter. The counter will be reset to 0.
Available options:
• Off: no decrement events
• RisingEdge: increment when the signal goes from Low to High
• FallingEdge: increment when the signal goes from High to Low.
• AnyEdge: increment on any Falling or Rising Edge.
• LevelHigh: increment when the signal is at the High section.
• LevelLow: increment when the signal is at the Low section.
CounterResetSource: selects the source for the reset signal.
Available options:
• PLC_Q3
• PLC_Q7
• PLC_Q8
• PLC_Q9
• PLC_Q10
• PLC_Q11
• PLC_Q16
• PLC_Q17
CounterTriggerSource: select the source signal to start the counter. Currently it is set to Off, meaning always
on.
CounterValue: the read only value showing the current counter value.
5.9.6 Pulse Generators controls
The Pulse Generator lets you create a pulsed digital signal with a configurable frequency. They can be
configured to emit a continuous (periodic) pulse. One use of this feature is to create a periodic trigger signal.
The low section of the signal is called Delay, and the high is called Duration.
TimerSelector: chooses which Timer to configure.
TimerDelayRaw: configures the raw value of the low section of the output signal. The formula to calculate
actual time is:
Duration of Low (nsec) = (Granularity + 1) * (TimerDelayRaw +1) * 30
TimerDurationRaw: configures the raw value of the high section of the output signal. The formula to calculate
actual time is:
Duration of High (nsec) = (Granularity + 1) * TimerDurationRaw * 30
TimerFrequency: a read-only field that shows the frequency of the pulse in Hz.
Configuring the Camera 57
Page 58

RM/TM-4200GE Series
TimerGranularityFactor: a multiplier value used to scale the Delay and the Duration in increments of 30 nsec.
TimerPeriod: shows the timer’s period in units of nsec.
TimerTriggerActivation: select the signal state of the TriggerSource to start the Timer.
• RisingEdge: starts when the trigger signal goes from Low to High
• LevelHigh: starts when the trigger signal is at the High state.
• FallingEdge: starts when the trigger signal goes from High to Low.
• AnyEdge: starts on any Falling or Rising Edge.
• LevelLow: starts when the trigger signal is at the Low state.
TimerTriggerSource: select the source of trigger to start the Timer.
• PLC_Q: the trigger source comes from the PLC Q output. Each Timer has their source from different Q
output port:
• Timer1 trigger comes from PLC_Q9
• Timer1 trigger comes from PLC_Q8
• Timer1 trigger comes from PLC_Q11
• Timer1 trigger comes from PLC_Q10
• Continuous: the Timer is always running.
5.9.7 PLC Grabber Features
IPEngine ÆGrabber Æ Channel0 ÆAcquisitionConfiguration
GrbCh0AcqCfgMemoryWaterLevel: the camera has 16MB of memory for frame buffering. Water level setting
specifies how much of that memory to use with the AcquistionMode’s recording features. Once the buffer is full
no more images will be stored. Possible settings are:
• Level50: 50%
• Level75: 75%
• Level87Point5: 87.5%
• Level100: 100%
GrbCh0AcqCfgInvertPixelData: invert pixel data turning the image into a negative image.
• True: turn on pixel inversion.
• False: turn off pixel inversion.
IPEngine ÆGrabber Æ Channel0 Æ TriggerConfiguration
GrbCh0TrigCfgFrameToSkip: set the number of images to discard for every one it keeps from the camera head.
5.9.8 IPEngine Examples:
Example 1: Setting the camera to accept external trigger signal:
Set ExposureMode to one of the Asynchronous modes.
Setup SignalRoutingBlock
a. Goto IPEngine > ProgrammableLogicController > SignalRoutingBlock
b. Set Trigger Input line by setting PLC_I0 to External_Trigger_In_Pin6
c. Set Camera Strobe Output by setting PLC_I4 to “Internal CAM_STROBE_Out”.
Setup the PLC to route the external trigger signal to the camera’s trigger line.
d. Goto IPEngine > ProgrammableLogicController > LookupTable > Q0/Q4/ Q5
i Set PLC_Q0_Variable0 to PLC_I4 (Strobe output)
ii Set PLC_Q4_Variable0 to PLC_I0 (Trigger Line)
iii Set PLC_Q5_Variable0 to One. (Integration signal always on.)
Example 2: Setting the camera to accept internal trigger signal generated via Timer 1:
58 Configuring the Camera
Page 59

RM/TM-42
00GE Series
r
1
r
r
r
Set ExposureMode to one of Asynchronous modes.
Setup the Timer (Pulse Generator)
a. Set TimerSelector to Timer1.
b. Set TimerTriggerSource to Continuous.
c. Set TimerDurationRaw, TimerDelayRaw, TimerGranularityFactor according to values
below.
i These are example values only; other combinations can also be used.
ii TimerFrequency tells you the rate of the trigger, hence frame rate.
<0.5 fps
TimerDurationRaw 200
TimerDelayRaw 10000
TimerGranularityFactor 7000
Setup SignalRoutingBlock
a. Goto IPEngine > ProgrammableLogicController > SignalRoutingBlock
b. Set PLC_I4 to “Internal CAM_STROBE_Out”.
c. Set PLC_I7 to Timer1Out.
Setup the ProgrammableLogicController (PLC) to route the Timer1 output to the camera’s trigger line.
a. Goto IPEngine > ProgrammableLogicController > LookupTable
i Set Q4 > PLC_Q4_Variable0 to PLC_I7 (Trigger Line)
ii Set Q0 > PLC_Q0_Variable0 to PLC_I4 (Strobe output)
iii Set Q5 > PLC_Q5_Variable0 to One. (Integration signal always on.)
Example 3: Setting up Integration Signal routing from external source:
Goto IPEngine > ProgrammableLogicController > SignalRoutingBlock
Set PLC_I3 to External_INT_In
Goto IPEngine > ProgrammableLogicController > LookupTable
Set Q5 > PLC_Q5_Variable0 to PLC_I3. (Integration signal always on.)
1 fps
200
4550
7000
5 fps
200
750
7000
5.10 Register Map
Category / Feature
AcquisitionAndTriggerControls
AcquisitionMode RW Continuous
AcquisitionFrameCount RW 1-255
AcquisitionStart RO Execute Command
AcquisitionStop RO Execute Command
Read/
Write
Value Range Default Value
Continuous Beginne
SingleFrame
MultiFrame
ContinuousRecording
ContinuousReadout
SingleFrameRecording
SingleFrameReadout
Visibility
Level
Beginne
Beginne
Beginne
Configuring the Camera 59
Page 60

RM/TM-4200GE Series
f
r
r
r
r
r
r
f
f
r
f
r
r
r
0
r
r
Category / Feature
ExposureMode RW Off
AsyncProgrammable RW 0-2079
Read/
Write
Value Range Default Value
ContinuousPreset1
…
ContinuousPreset9
ContinuousProgrammable
AsyncNoShutter
AsyncPreset1
…
AsyncPreset8
PulseWidthControl
FixedExposurePIV
PWC_PIV
AsyncProgrammable
Of
Factory Set
Visibility
Level
Beginne
Beginne
ContinousProgrammable RW ScanMode Limited
0 - 2079 (A)
0 - 1100 (B)
0 - 600 (C)
0 - 400 (D)
0 - 2079 (UserProgramble)
0 - 1050 (Binning 2x2)
0 - 650 (RPDZoom)
TriggerPolarity RW ActiveLow
ActiveHigh
AnalogControls
GainSelector RW All
Tap2
GainRaw RW 0 - 4095
GainAutoBalance RW Of
Once
BlackLevelSelector RW All
Tap2
BlackLevelRaw RW 0 - 4095
BlackLevelAutoBalance RW Of
Continuous
CountersAndTimersControls
Factory Set
ActiveLow
All
Factory Set
Of
All
Factory Set
Continuous
Beginne
Beginne
Beginne
Beginne
Beginne
Expert
Expert
Expert
TimerSelector RW Timer1
TimerDelayRaw RW 1-65535
TimerDurationRaw RW 1-65535
TimerGranularityFactor RW 1-65535
TimerTriggerActivation
60 Configuring the Camera
Timer2
Timer3
Timer4
RW RisingEdge
LevelHigh
FallingEdge
AnyEdge
LevelLow
Timer1
1024
4096
RisingEdge
Beginne
Beginne
Beginne
Beginne
Beginne
Page 61

RM/TM-42
00GE Series
Q
Q
r
r
f
f
r
0
r
f
f
r
f
f
r
r
f
Off
r
r
r
r
r
r
r
Category / Feature
TimerTriggerSource RW PLC_
CounterSelector RW Counter1
CounterDecrementEventSour
ce
CounterDuration RW 0-4294967295
CounterEventSource RW Of
CounterResetActivation RW Of
CounterResetSource RW PLC_Q3
CounterTriggerSource RW Of
Read/
Write
RW Of
Value Range Default Value
Continuous
PLC_Q16_RisingEdge
PLC_Q16_FallingEdge
PLC_Q16_AnyEdge
PLC_Q16_LevelHigh
PLC_Q16_LevelLow
PLC_Q17_RisingEdge
PLC_Q17_FallingEdge
PLC_Q17_AnyEdge
PLC_Q17_LevelHigh
PLC_Q17_LevelLow
RisingEdge
FallingEdge
AnyEdge
LevelHigh
LevelLow
PLC_Q7
PLC_Q8
PLC_Q9
PLC_Q10
PLC_Q11
PLC_Q16
PLC_Q17
Visibility
Level
PLC_
Counter1 Beginne
Of
Of
Of
PLC_Q3 Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
CounterValue RO 0 - 4294967295
DeviceInformation
DeviceVendorName RO
DeviceModelName RO
DeviceManufacturerInfo RO
DeviceVersion RO
DeviceID RO
DeviceUserID RW User definable string
GigEVisionTransportLayer
GevSCPSPacketSize RW 72 - 16260
Configuring the Camera 61
1428
Beginne
Beginne
Beginne
Beginne
Beginne
Expert
Beginne
Expert
Page 62

RM/TM-4200GE Series
f
r
r
r
r
r
r
r
r
r
r
r
f
f
r
Category / Feature
GevPersistentIPAddress
GevPersistentSubnetMask RW 000.000.000.000 - 255.255.255 000.000.000.000 Expert
GevPersistentDefaultGateway RW 000.000.000.000 - 255.255.255 000.000.000.000 Expert
Read/
Write
RW 000.000.000.000 - 255.255.255 000.000.000.000 Expert
Value Range Default Value
Visibility
Level
GevCurrentIPConfigurationPe
rsistenIP
ImageSizeControl
SensorDigitizationTaps RW One
WidthMax RO 0 – 2048
HeightMax RO 0 - 2048
Width RW 0 to (WidthMax - OffsetX)
Height RW 0 to (HeightMax - OffsetY)
OffsetX RW WidthMax - Width
OffsetY RW HeightMax - Height
PixelFormat RW Monochrome:
ScanMode RW A_2048x2048
UserScanAreaStart RW 0 to (2048 - UserScanAreaLines
RW On
Off
Two
Mono8
Mono10
Mono10Packed
Mono12
Mono12Packed
Bayer:
BayerGR8
BayerBG8
BayerGR10
BayerBG10
BayerGR12
BayerBG12
B_2048x1000
C_2048x500
D_2048x250
UserProgrammable
Binning_2x2
RPDZoom_4X
RPDZoom_2X
RPDZoom_1point3X
RPDZoom_1X
- 1)
Of
Two
Monochrome:
Mono8
Bayer: BayerGR8
A_2048x2048
0
Beginne
Expert
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
UserScanAreaLines RW 0 to (2048 - UserScanAreaStart) 500
TestImageSelector RW Of
62 Configuring the Camera
DeviceSpecific
IPEngineTestPattern
Of
Beginne
Beginne
Page 63

RM/TM-42
00GE Series
r
r
r
r
r
r
r
r
r
r
r
Category / Feature
LUT
LUTMode RW Linea
KneeX1 RW 0 - 255
KneeY1 RW 0 - 255
KneeX2 RW 0 - 255
KneeY2 RW 0 - 255
LUTInversion RW Execute Command
UserSets
UserSetSelector RW Default
UserSetLoad RW Execute Command
UserSetSave RW Execute Command
UserSetDefaultSelector RW Default
Read/
Write
Value Range Default Value
Gamma45
Knne
UserSet1
UserSet1
Visibility
Level
Linea
255
255
255
255
UserSet1 Beginne
UserSet1 Expert
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Beginne
Configuring the Camera 63
Page 64

6 Troubleshooting
6.1 Problems and Solutions
Following are troubleshooting tips for common problems. In general, the problems listed in this section are
solved by following these instructions. If there is no solution listed to the problem you are encountering,
contact a JAI Inc. representative.
6.1.1 Symptom: No Video
Remedies: Check that the following are properly connected and operational.
RM/TM-4200GE Series
Power supplies
Power cables
Main power source
Shutter control
Async mode
Lens
Digital output cable
Analog video cable
6.1.2 Symptom: Dark Video
Remedies: Check that the following are properly connected and operational.
Shutter selection
Iris opening on the lens
6.1.3 Symptom: Non-Synchronized Video
Remedies: Check that the following are properly connected and operational.
Proper mode output
Frame grabber software camera selection
6.1.4 Symptom: Image incomplete or contain black lines.
Remedies: this could be due to bandwidth or dropped packet issues. Check that GevSCSPacketSize and
PixelFormat are set to recommended values, Jumbo Frames is enabled on you machine, or try reducing the
image size.
6.1.5 Symptom: Notebook Computer Driver Installation Problems
Remedies: The IBM T-42 laptop is unable to properly install.
6.2 Information and Support Resources
For further information and support:
Phone: (408) 383-0300
Fax: (408) 383-0301
Email: camerasales.americas@jai.com
Mail: JAI, Inc.
Web site: www.jai.com
64 Troubleshooting
(800) 445-5444
Sales Department
625 River Oaks Parkway
San Jose, CA 95134
ATTN: Video Applications
Page 65

RM/TM-42
00GE Series
7 Appendix
7.1 Specifications
Table 9 TM-4200GE Camera Specifications Table
Feature TM-4200GE
Imager 1.2" progressive scan interline transfer CCD (KAI-4021)
Active Area 15.15mm x 15.15mm
Active Pixels 2048 (H) x 2048 (V)
Cell Size 7.4μm x 7.4μm
Display Mode (Active Pixels) 2048 (H) x 2048 (V) @ 15 Hz (full image)
2048 (H) x 1000 (V) @ 28 Hz (partial scan)
2048 (H) x 500 (V) @ 50Hz (partial scan)
2048 (H) x 250 (V) @ 80Hz (partial scan)
Sync Internal/External auto switch
HD/VD, 4.0 Vp-p impedance 4.7 K ohms
VD=14.79±2%, non-interlace
HD=30.78 kHz±2%
Data Clock Output 40.00 MHz
Resolution Digital: 2048 (H) x 2048 (V),
(Analog: over 800 TV lines (H) x 1600 TV lines (V))
S/N Ratio >58dB min.
Min. Illumination Monochrome: 0.12 lux. Color: 0.8 lux.
f = 1.4 (no shutter) @ 15 fps. Sensitivity: 31uV/e-
Video Output Analog
Digital
Gamma Programmable LUT (1.0 std.)
Lens Mount C-mount (use >1.2" format lenses or larger)
Power Requirement 12V DC, ±10%, 590mA (typical at 25°C)
Operating Temp. -10°C to 50°C*
Vibration 7 Grms (10Hz to 2000Hz) Random, 11 ms half sine
Shock 70G
Size (W x H x L) 51mm x 51mm x 85mm
Weight 214 grams (7.5 oz.) without tripod
Optional Functions OP3-1 Internal IR Filter Added; OP3-2 Optical Filter
Optional Accessories
Power Cable 12P-02S
Power Supply PD-12UUP series (includes power connector)
Tripod Mounting Kit TP-20
*. Refer to Section 2.2.1 for information on camera heat dissipation. Image quality will degrade with increasing
temperature.
1.0 Vp-p, 75Ω
Gigabit Ethernet (8-bit, 10-bit, 12-bit)
Removal; OP21 Glassless CCD Imager; OP21-1UV Ultraviolet
Imager; OP65-6 F-Mount; OP65-7 M-Mount; OP65-8 M-Mount
with 10 mm Backfocus
Appendix 65
Page 66

RM/TM-4200GE Series
7.1.1 TM-4200GE Physical Dimensions
Figure 40. Physical Dimensions
Caution:When mounting the camera to any fixture, do not use screws that extend more than 5 mm into the
camera housing to avoid possible damage to the internal circuitry. For attaching the tripod mounting plate,
only the supplied screws should be used.
66 Appendix
Page 67

RM/TM-42
00GE Series
7.1.2 Spectral Response
Figure 41. TM-4200 Spectral Response
Figure 42. TMC-4200 Spectral Response
Appendix 67
Page 68

RM/TM-4200GE Series
68 Appendix
Page 69

Page 70

Europe, Middle East & Africa
Phone +45 4457 8888
Fax +45 4491 3252
Asia Pacific
Phone +81 45 440 0154
Fax +81 45 440 0166
Americas
Phone (Toll-Free) 1 800 445-5444
Phone +1 408 383-0301
www.jai.com
 Loading...
Loading...