

IXXAT CANio 500 Quick Start Manual

Quickstart Manual
CANio 500
I/O-to-CAN Gateway
English

HMS Technology Center Ravensburg GmbH
Helmut-Vetter-Straße 2
D-88213 Ravensburg
Germany
Tel.: +49 751 56146-0
Fax: +49 751 56146-29
Internet: www.hms-networks.com
E-Mail: info-ravensburg@hms-networks.com
Support
In case of unsolvable problems with this product or other HMS products
please fill in support form in the support are on www.ixxat.com.
Further international support contacts can be found on our webpage
www.ixxat.com
Copyright
Duplication (copying, printing, microfilm or other forms) and the electronic
distribution of this document is only allowed with explicit permission of
HMS Technology Center Ravensburg GmbH. HMS Technology Center
Ravensburg GmbH reserves the right to change technical data without
prior announcement. The general business conditions and the regulations
of the license agreement do apply. All rights are reserved.
Registered Trademarks
All trademarks mentioned in this document and where applicable third
party registered are absolutely subject to the conditions of each valid
label right and the rights of particular registered proprietor. The absence
of identification of a trademark does not automatically mean that it is not
protected by trademark law.
Document number: 4.01.0098.20000
Version: 1.3

Content
Copyright IXXAT Automation GmbH
3
CANio 500 Quickstart Manual, version 1.3
1 General information ....................................................................... 5
1.1 Highlights ................................................................................ 5
1.2 Designs and device variants ................................................. 6
2 Connector assignments ................................................................. 6
2.1 Connector (X1) power supply 6-32 V DC .............................. 6
2.2 Connector (X2) CAN ............................................................... 7
2.3 Connector (X3) digital ............................................................ 7
2.4 Connector (X4) analog ........................................................... 9
3 LED displays ................................................................................... 9
3.1 PWR - LED .............................................................................. 9
3.2 CAN - LED ............................................................................. 10
3.3 USR 1/2 - LED ....................................................................... 10
4 Description of functions .............................................................. 10
4.1 Introduction .......................................................................... 10
4.2 Galvanic isolation ................................................................ 10
4.3 Digital outputs ...................................................................... 10
4.4 Digital inputs .......................................................................... 11
4.4.1 Digital inputs 1-4 .................................................................... 11
4.4.2 Additional digital input on connector (X1) .............................. 11
4.5 Analog outputs ...................................................................... 11
4.6 Analog inputs ....................................................................... 12
4.6.1 0 - 10 V input range ................................................................ 13
4.6.2 ±5V input range ...................................................................... 13
4.6.3 ±100 mA input range .............................................................. 14
4.7 Power supply PWR(+) .......................................................... 14
5 Software ........................................................................................ 15
5.1 CANio 500 as a CAN module ............................................... 16
5.1.1 CAN – Identifier ...................................................................... 16
5.1.2 CAN baudrate ........................................................................ 16
5.1.3 Node number ......................................................................... 16
5.1.4 Setting the digital outputs ....................................................... 16
5.1.5 Control of the analog outputs ................................................. 17
5.1.6 Digital inputs ........................................................................... 18

Content
Copyright IXXAT Automation GmbH
4
CANio 500 Quickstart Manual, version 1.3
5.1.7 Digital inputs: edge events ..................................................... 19
5.1.8 Analog inputs ......................................................................... 20
5.1.9 Value of the power supply PWR(+) ........................................ 20
5.1.10 Heartbeat message .............................................................. 21
5.1.11 Emergency messages .......................................................... 22
5.1.12 Error management................................................................ 25
5.1.13 Factory settings .................................................................... 25
5.1.14 Reserved CAN identifiers ..................................................... 26
5.1.15 Steering the state machine of the CANio 500 ...................... 26
6 General ......................................................................................... 29
6.1 Support ................................................................................. 29
6.2 Returning hardware.............................................................. 29
6.3 Note on disposal of used devices ....................................... 29
6.4 Note on EMC ......................................................................... 30
6.5 FCC Compliance ................................................................... 30
6.6 EC DECLARATION OF CONFORMITY ................................. 31

General information
Copyright IXXAT Automation GmbH
5
CANio 500 Quickstart Manual, version 1.3
1 General information
The CANio 500 is a universal interface for analog and digital signals.
This manual is intended to help you to learn more about the CANio 250.
Please read this manual before using the CANio 250 for the first time. Therefore it is restricted to the essential topics. For further details – mainly with respect to the application software – the corresponding manuals are provided
online.
1.1 Highlights
Power supply 6 - 32 V DC
Power consumption 1.2 Watt (without load connected to the outputs)
CAN bus connection according to ISO 11898-2 with galvanic isolation
Communication as CAN node or CANopen device
4 digital inputs
4 digital outputs, high-side switch, short-circuit protection
4 analog inputs, 12-bit, precision typical 3%, device variants:
o 0 … +10 V
o -5 … +5 V
o -100 … +100 mA
4 analog outputs, 12-bit, precision typical 0.5%, output ranges pro-
grammable via software:
o 0 … +5 V
o 0 … +10 V
o -5 … +5 V
o -10 … +10 V
o -10.8 … +10.8 V
Monitoring of the power supply
Additional digital input on power supply connector
All inputs are protected for voltages up to 60 V
2 LEDs (both two-colored) controllable via software
1 LED for the CAN bus status
1 LED for the power supply
Robust aluminum housing
Temperature range -40 °C to 70 °C
Connector assignments
Copyright IXXAT Automation GmbH
6
CANio 500 Quickstart Manual, version 1.3
1.2 Designs and device variants
The CANio 500 is available in the following variants of the analog inputs:
Order number
Designs and device versions
1.01.0098.00000
CANio 500 with 4 analog inputs 0 … +10 V
1.01.0098.00001
CANio 500 with 4 analog inputs -5 … +5 V
1.01.0098.00002
CANio 500 with 4 analog inputs -100 … +100 mA
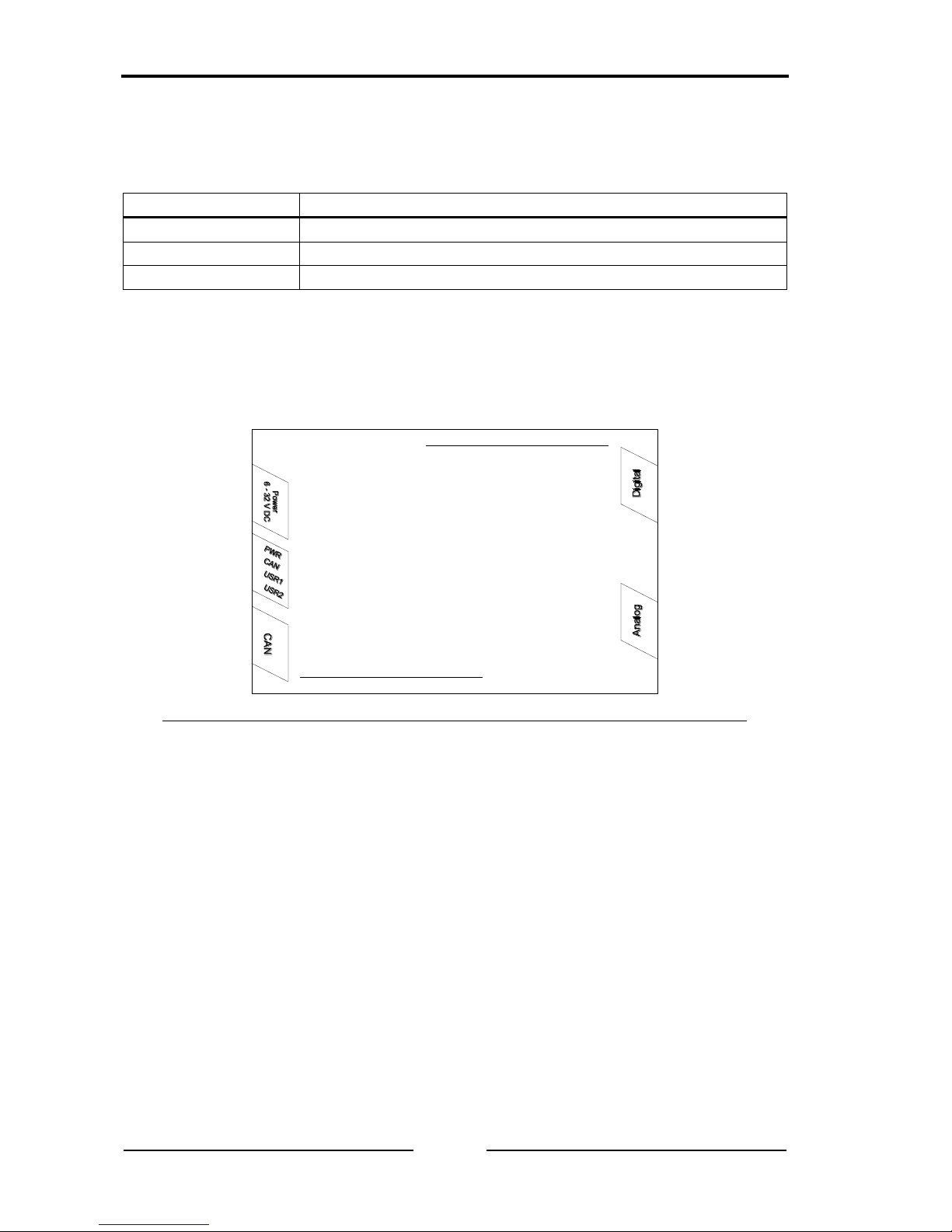
2 Connector assignments
X1 X3
LED
X2 X4
Figure 2-1: Connector assignments
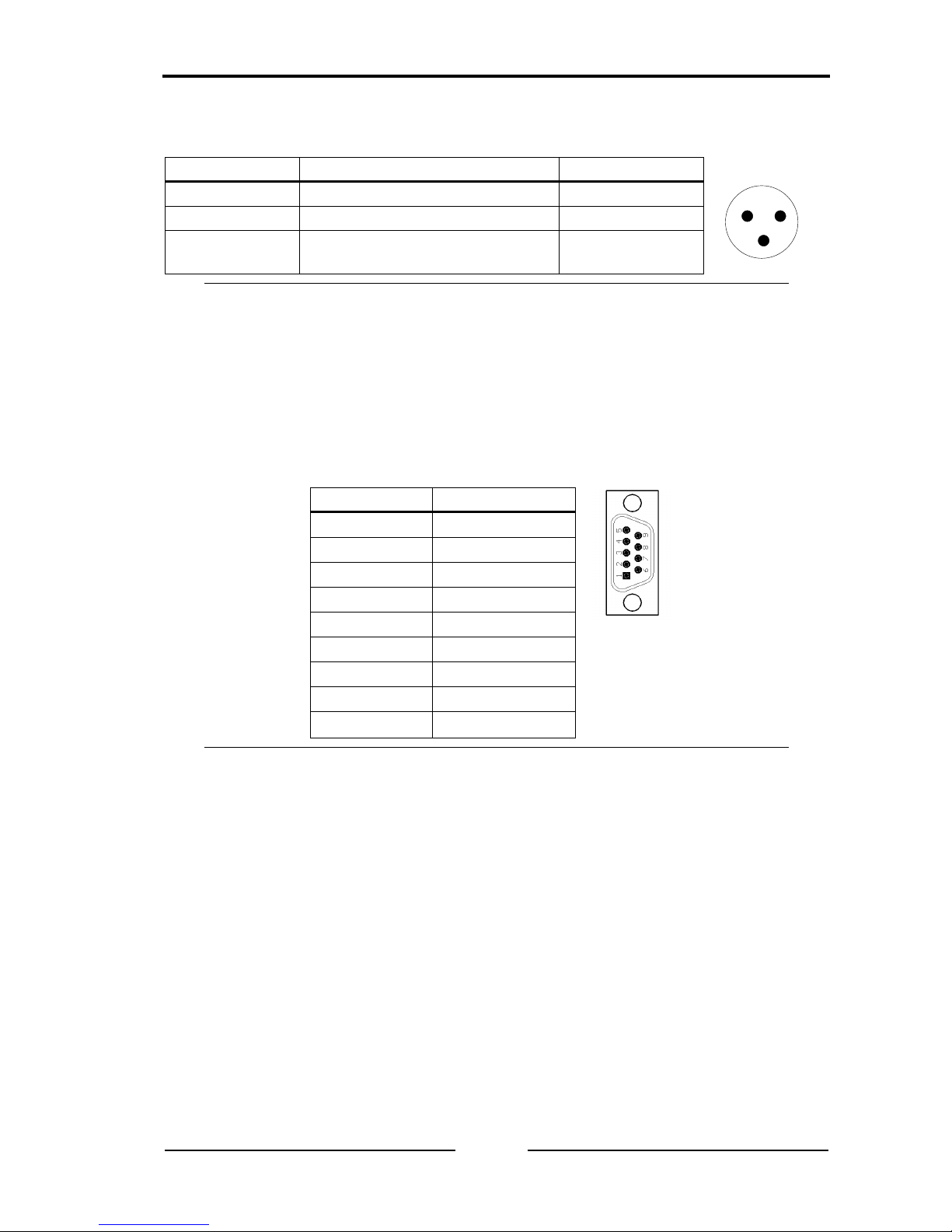
2.1 Connector (X1) power supply 6-32 V DC
The CANio 500 is supplied with DC voltage of 6 V – 32 V The scope of supply
includes made-up cable for power supply. The terminal assignment is given in
table 2-1.
The type of connector is: Binder cable socket 99-0976-100-03
The CANio 500 is protected against reverse polarity, undervoltage and overvoltage. It is switched off in the case of reverse polarity or undervoltage. The
CANio survives overvoltage up to 60 V and load dump undamaged. In the
event of voltages above this, an internal fuse may be tripped. If the internal
fuse is tripped, the CANio 500 is no longer operational and must be returned to
IXXAT for repair.
CANio 500
I/O-to-CAN Gateway
Connector assignments
Copyright IXXAT Automation GmbH
7
CANio 500 Quickstart Manual, version 1.3
The additional digital input is also connected on this connector.
Pin no. X1
Signal
Wire color
1
123
1
PWR (+)
white
2
GND (-)
brown
3
Additional digital input on power supply connector
Shield
Table 2-1: Pin assignment power supply
2.2 Connector (X2) CAN
CAN is available on connector X2 with a bus connection according to ISO
11898-2. The signals of the bus connection are available on the 9-pin D-Sub
connector (pins, male) (see table 2-2).
Pin no. X2
Signal
1
-
2
CAN Low
3
GND_GND
4
-
5
-
6 - 7
CAN High
8
-
9
-
Table 2-2: Pin assignment CAN connector D-Sub 9
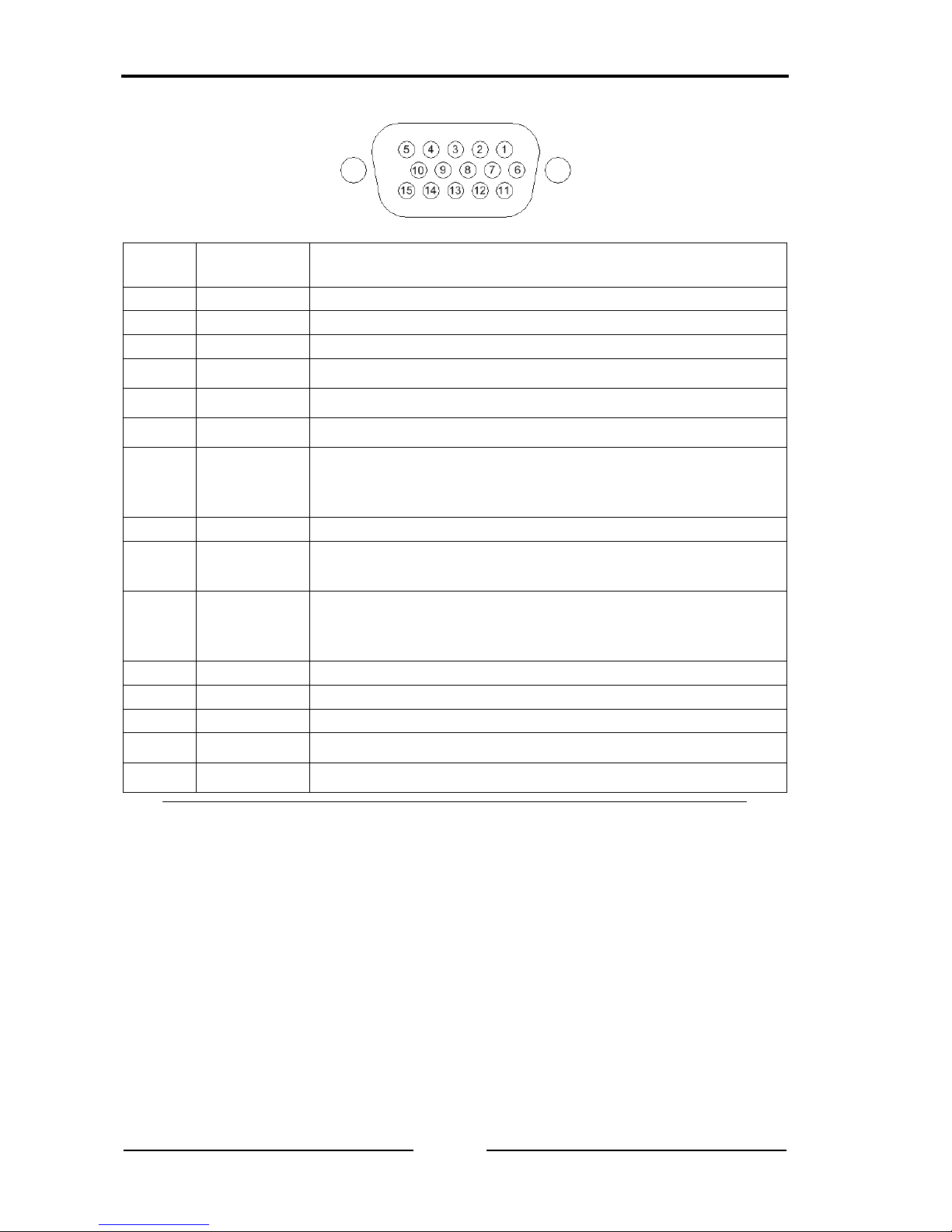
2.3 Connector (X3) digital
The digital signals are available on connector X3. Connector X3 is designed as
a 15-pin high density D-Sub HDF15 (socket, female) (see table 2-3).
The functions of the digital inputs and outputs are described in chapters 4.3
and 4.4.
Connector assignments
Copyright IXXAT Automation GmbH
8
CANio 500 Quickstart Manual, version 1.3
Pin
no. X2
Signal
Description
1
DIG_IN1
Digital input 1
2
DIG_IN2
Digital input 2
3
GND
Ground
4
DIG_OUT1
Digital output 1, high-side switch supplied with VBAT_IN.
5
DIG_OUT2
Digital output 2, high-side switch supplied with VBAT_IN.
6
VREF_IN
Reference input for digital inputs
7
VREF_OUT
Output. Here a voltage is available according to the power
supply PWR(+). This output can be connected to the
VREF_IN input.
8
Reserved
This connection must remain open
9
VBAT_IN
Power supply for the high-side switches of the digital outputs.
10
VBAT_OUT
Output (1 A protected). Here a voltage is available according to the power supply PWR(+). This output can be connected to the VBAT_IN input.
11
DIG_IN3
Digital input 3
12
DIG_IN4
Digital input 4
13
GND
Ground
14
DIG_OUT3
Digital output 3, high-side switch supplied with VBAT_IN.
15
DIG_OUT4
Digital output 4, high-side switch supplied with VBAT_IN.
Table 2-3: Pin assignment digital interface connector D-Sub HDF15
LED displays
Copyright IXXAT Automation GmbH
9
CANio 500 Quickstart Manual, version 1.3
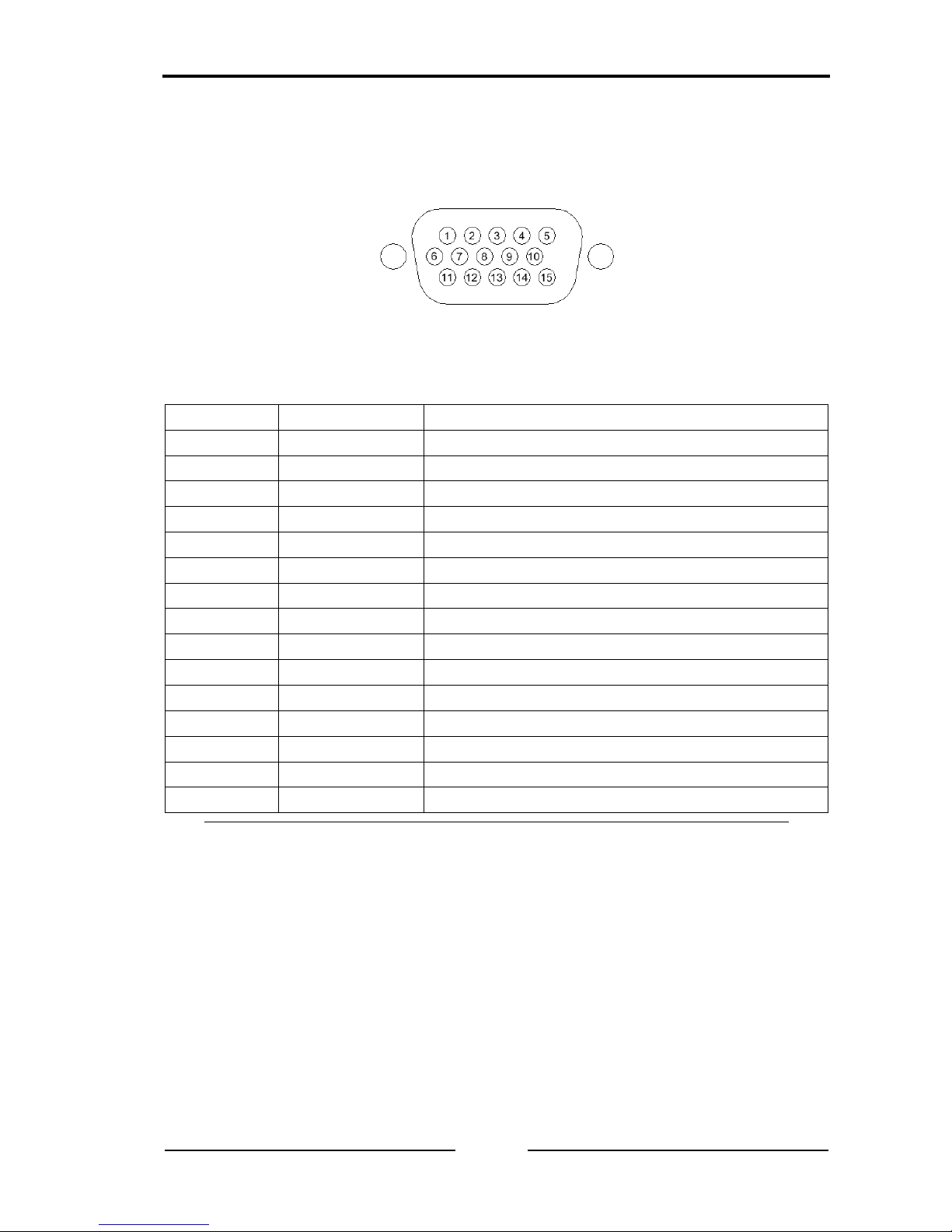
2.4 Connector (X4) analog
The analog signals are available on connector X4. Connector X4 is designed
as a 15-pin high density D-Sub HDM15 (pins, male) (see table 2-4).
The functions of the analog inputs and outputs are described in chapters 4.5
and 4.6.
Pin no. X4
Signals
Description
1
ANA_IN1_P
Analog input 1 positive (+)
2
ANA_IN2_P
Analog input 2 positive (+)
3
GNDA
Analog ground
4
ANA_IN3_P
Analog input 3 positive (+)
5
ANA_IN4_P
Analog input 4 positive (+)
6
ANA_IN1_M
Analog input 1 negative (-)
7
ANA_IN2_M
Analog input 2 negative (-)
8
GNDA
Analog ground
9
ANA_IN3_M
Analog input 3 negative (-)
10
ANA_IN4_M
Analog input 4 negative (-)
11
ANA_OUT1
Analog output 1
12
ANA_OUT2
Analog output 2
13
GNDA
Analog ground
14
ANA_OUT3
Analog output 3
15
ANA_OUT4
Analog output 4
Table 2-4: Pin assignment analog interface connector D-Sub HDM15
3 LED displays
The CANio 500 has four two-colored LEDs (see Figure 2-1). The LEDs react
as follows according to the operating mode of the CANio 500.
3.1 PWR - LED
The Power-LED (PWR) is lit green when the CANio 500 is connected to the
power supply. The Power-LED (PWR) is lit red when the power supply is connected with reverse polarity.

Description of functions
Copyright IXXAT Automation GmbH
10
CANio 500 Quickstart Manual, version 1.3
3.2 CAN - LED
The CAN-LED displays the status of the CANopen State Machine (green) and
the error status. In the 'CAN BUS OFF' status, no more communication is possible and the CAN - LED is permanently lit red.
3.3 USR 1/2 - LED
The User-LEDs (USR 1/2-LED), which can be freely programmed by the user,
can be switched via CAN messages. More information is given in chapters
5.1.4 and Error! Reference source not found..
4 Description of functions
4.1 Introduction
The CANio 500 allows monitoring or setting of analog and digital signals via a
CAN network.
4.2 Galvanic isolation
In the case of galvanic isolation, the ground of CAN (GND_CAN) is isolated
from the rest of the circuit.
The ground of the power supply [GND (-)] and of the digital and analog interfaces are connected to each other.
4.3 Digital outputs
High-side switches are used for the 4 digital outputs. The digital outputs can
be switched with a CAN message. More information is given in chapter 5.1.4.
The high-side switch can switch up to 34 V. In addition, they offer current limitation, thermal monitoring and surge protection up to 60 V (load dump). They
can also operate with inductive loads. The sum of the currents across all four
outputs should not exceed 1 A. Otherwise current limitation may be triggered.
The high-side switch modules are operated with the voltage VBAT_IN, which
is to be connected on the digital connector (X3). The power supply PWR(+) is
led out again on the connector for the digital interfaces (X3) (VBAT_OUT) and
can then be connected to the pin VBAT_IN via a bridge on connector (X3). If
other voltages are used, the bridge remains open and any voltage between 0
to 34 V can be supplied to the pin VBAT_IN. The pin VBAT_IN is used as a
power input for all 4 digital outputs. If the pin VBAT_IN remains open, the digital outputs have no function.
The voltage output VBAT_OUT is protected against overcurrent and shortcircuiting via a resettable fuse. If the fuse is triggered in the event of an over-
 Loading...
Loading...