

Page 1

mightyZAP
User Manual
Robust Mini Linear Servo Motor ------
Page 2
mightyZAP USER MANUAL V.1.02
2
INDEX
01 Before USE 3
Introduction
For Safety
For Storage
02 Basic Info 4
Component
Dimension
Specification
03 Application 6
Manipulator
Stewart Platform
Installation
04 Servo Control 8
Circuit Connection
Communication
Specification
Packet Description
Data Map
Command Example
05 Warranty Service 26
Page 3

mightyZAP USER MANUAL V.1.02
3
1.1. Introduction
Thank you for purchasing mightyZAP mini Linear servo motors! Please peruse this manual before use to prevent
any unexpected damage of product or serious injury of users.
mightyZAP mini Linear servo motors have been developed to provide reliable, high quality linear solution in
compact space. mightyZAP mini Linear servo motors can be applied in various fields such as factory automation,
medical devices, robotics, professional UAV and radio control hobby.
[Features]
Position Control (Positional Accuracy 100um)
Embedded Drive circuit
4096 Step High Resolution
High Performance Coreless Motor
Minimized Mechanical Backlash (50um)
Excellent Substitute for pneumatic cylinder which does not support position control
Reasonable Cost
1.2. For Safety
Do not disassemble servo motor at user's discretion. Maintenance should be done by authorized
engineer.
Use designated input power to prevent damage of product.
Use within the force at rated power(Peak Efficiency Point) for better lifespan & proper performance.
Be careful to touch the servo case right after operation. It may be hot.
Be sure to keep servo motor away from water, dust, sand, oil.
This product is designed for indoor use. Do not use it outdoor condition.
Do not push / pull the servo rod by excessive force.
Keep out of reach of Children.
1.3. For Storage
Do NOT store/use servo motor under below extreme condition. It may cause malfunction or damage of product.
Direct light and High temperature more than 60 ˚C or Low temperature lower than minus 20˚C.
Highly Humid space
Space having Vibrating condition
Space having Dust
Space causing Electrostatic
1
Before Use
Page 4
mightyZAP USER MANUAL V.1.02
4
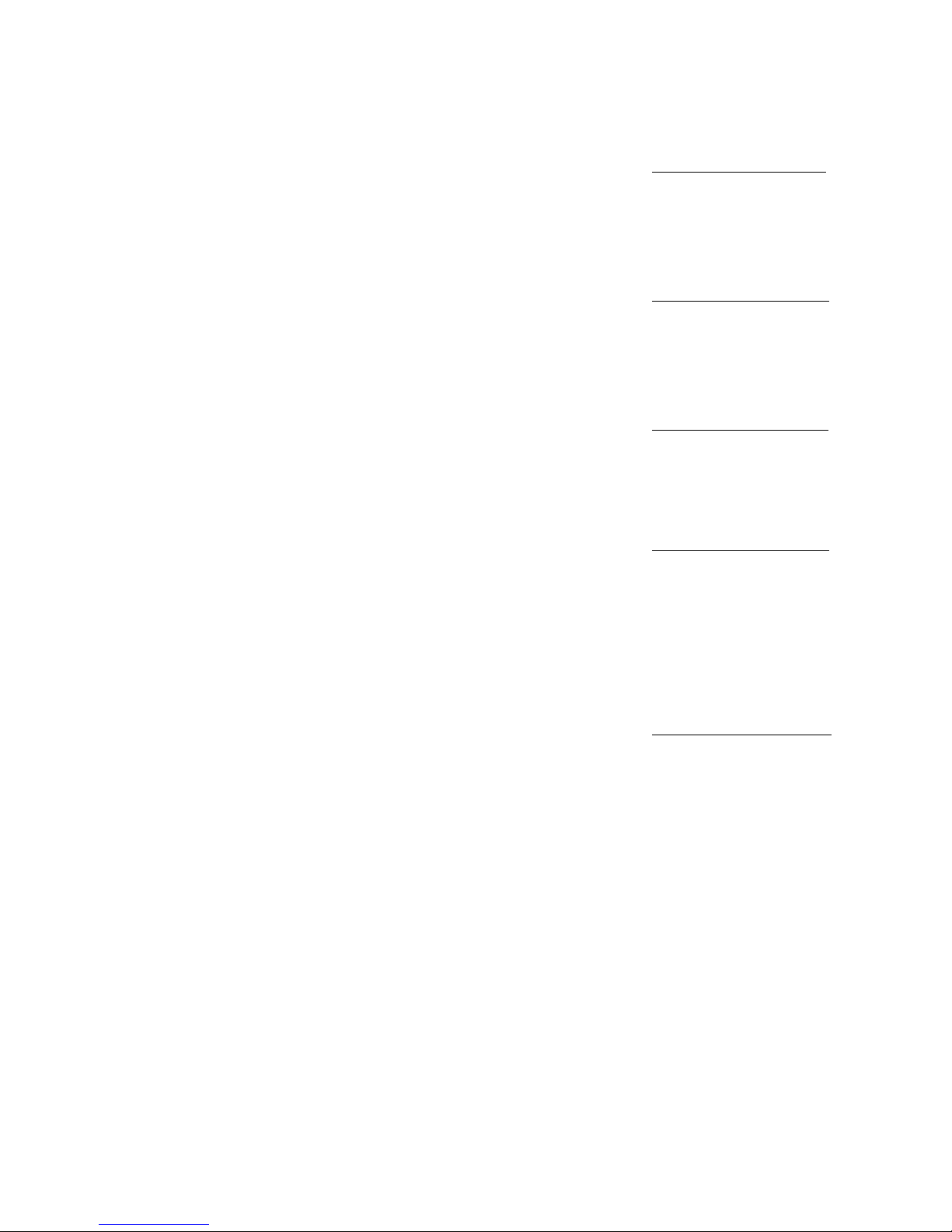
2.1. Component
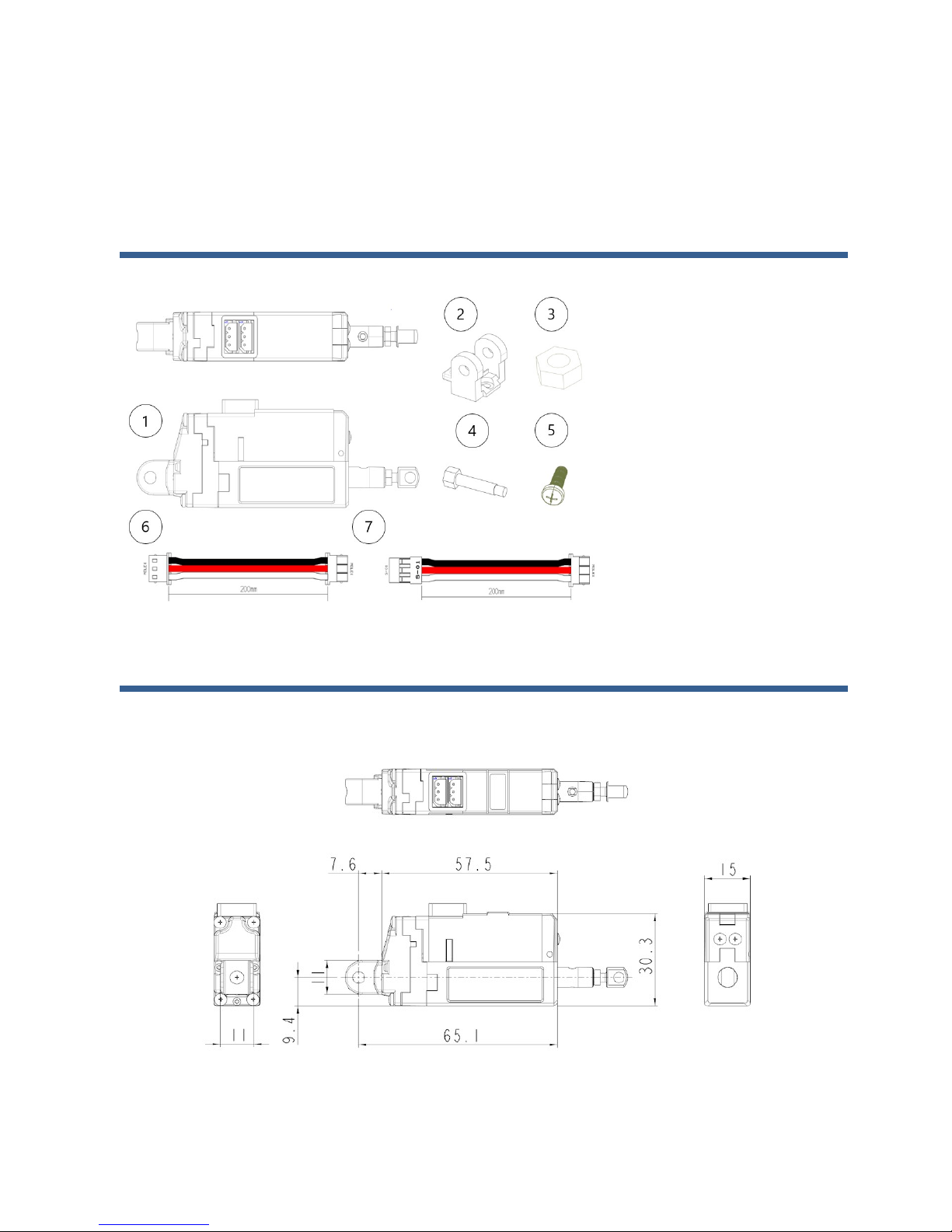
2.2. Dimension
2
Basic Information
① mightyZAP Linear servo motor
② Hinge Base 1pc
③ M3 NUT
④ Hinge Shaft
⑤ M2.5x6
⑥ 200mm Molex to Molex Wire
⑦ 200mm S-01 to Molex Wire
Page 5
mightyZAP USER MANUAL V.1.02
5
2.3. Specification
Stock Item
L(7)12-20PT-3 L(7)12-40PT-3
High Speed High Force
Peak Power Point 40N@55mm/s 80N@16mm/s
Peak Efficiency Point
20N@90mm/s 40N@28mm/s
Max. Speed(no load) 110mm/s 37mm/s
Gear Type Super Engineering Plastic
Order Made Item
L(7)12-13PT-3 L(7)12-64PT-3 L(7)12-100PT-3
Ultra Speed High Force Ultra Force
Peak Power Point 26N@70mm/s 128N@6mm/s 200N@3.7mm/s
Peak Efficiency Point
13N@112mm/s 64N@10mm/s 100N@6mm/s
Max. Speed(no load) 149mm/s 12.4mm/s 7.46mm/s
Gear Type Super Engineering Plastic
2 Metal & 4 Super
Engineering Plastic
4 Metal & 2 Super
Engineering Plastic
Common Specification
Motor Type High Performance Coreless motor
Gear Type Super Engineering Plastic
Stroke 30mm
Positional Accuracy Under 0.1mm (100μ
m
)
Electric al Stroke 30mm
Feedback Potentiometer
10KΩ /mm +/- 1% linearity
Input Voltage Optional - 7.4V or 12.1V (Rated)
Stall Current 3.4A at 7.4V / 2.3A at 12.1V (Premium line)
Operating Temperature -10℃ ~ 50℃
Mechanical Backlash 0.05mm (50μ
m
)
Control System TTL Half Duplex (Daisy Chain) and PWM with Position Feedback
Microcontroller 32bit ARM Core, 4096 Resolution (AC/DC converter)
Pulse Range 900 ㎲(Retracted)~1500 ㎲(Center)~2100 ㎲(Extended)
Parameter Setting Programmable
Ingress Protection IP-54 (Dust & Water Tight)
Dimension / Weight 57.5(L)x29.9(W)x15(H)mm / 45g
LED Indication 7 Errors Indication
(Overload, Checksum, Range, Overheat, Stroke Limit, Input voltage, Instruction Error)
Standard Accessory 1 Mounting Bracket, 2 types Rod end (Detachable linkage and Metal nut(M2.5) type)
Wire/Connector Molex to S-01(Hitec and Futaba compatible) and
Molex to Molex Type(Molex 50-37-5033) / 200mm length, 0.08x60(22AWG)
Caution
Use within Rated Force
For proper performance and better lifespan of mightZAP, it is stronlgy requested to
use it within the rated force range(Rated Force = Peak Efficiency Point).
Page 6
mightyZAP USER MANUAL V.1.0
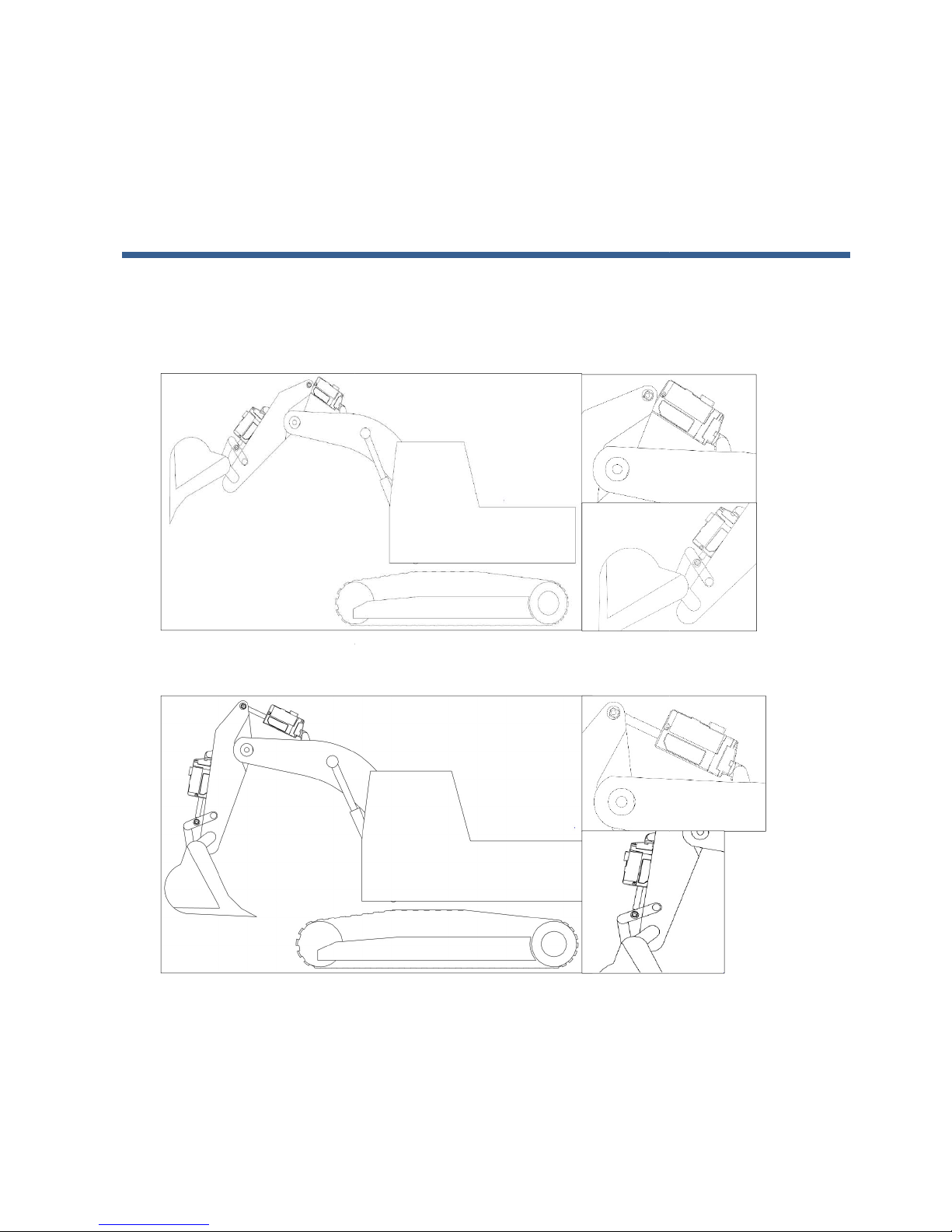
3.1. Manipulator
Blow picture shows excavator arm using mightyZAP.
4 joint link structure and 2 joint
structure
picture to make a rotating movement.
[
In case servo position at 0
[
In case servo position at
3
Application
2
6
are simplified. Based on basic link structure, you can refer to below
- fully retracted position]
30mm - fully extended position]
Page 7
mightyZAP USER MANUAL V.1.02
7
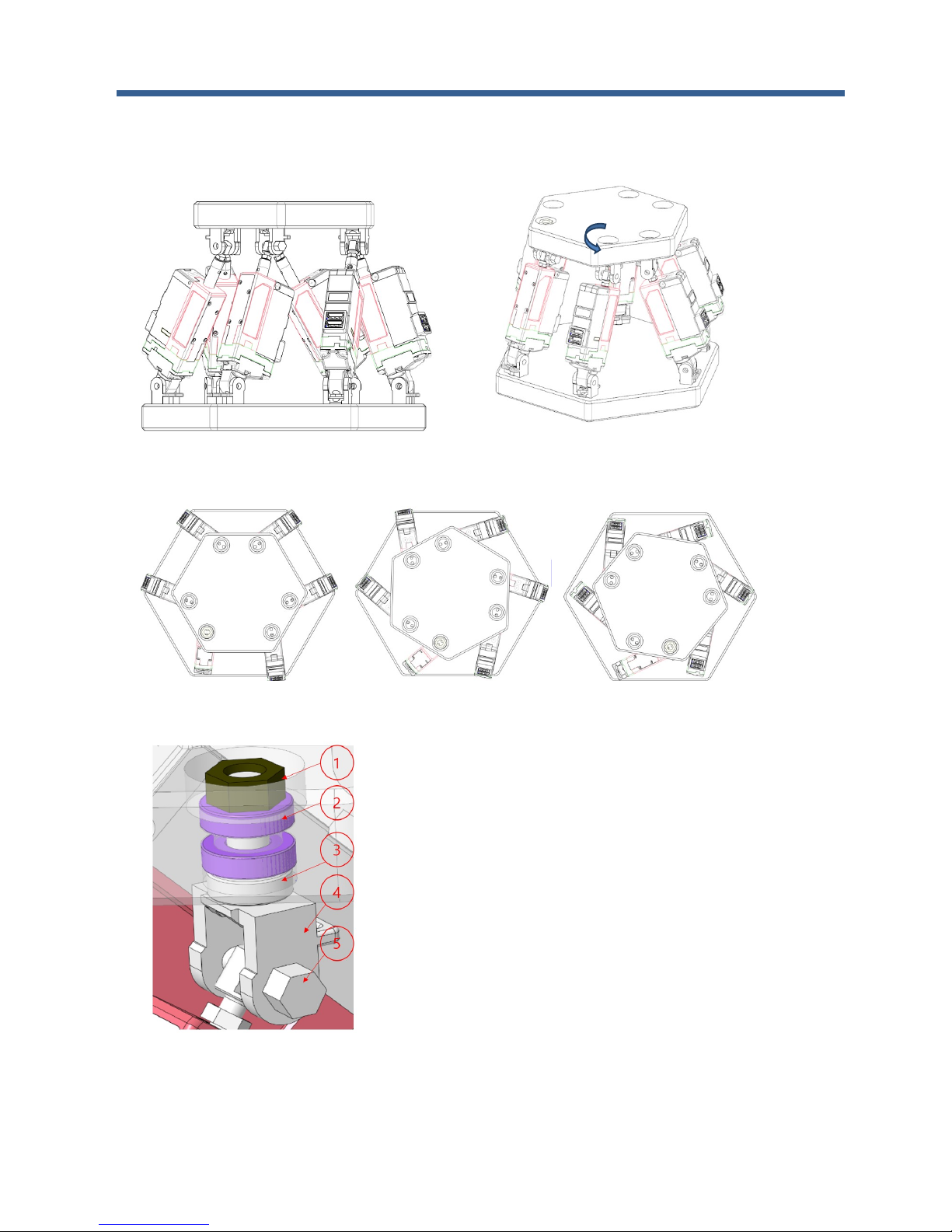
3.2. Stewart Platform
Stewart Platform having 6 rotating axis on both upper and lower panel. You can make X, Y, Z movements and
plus, Z axis rotating movement.
Above shows how to make rotating movement of upper panel.
①Nut
②Bearing
③Rotating Shaft
④Linkage Base
⑤Linkage Shaft
Page 8
mightyZAP USER MANUAL V.1.0
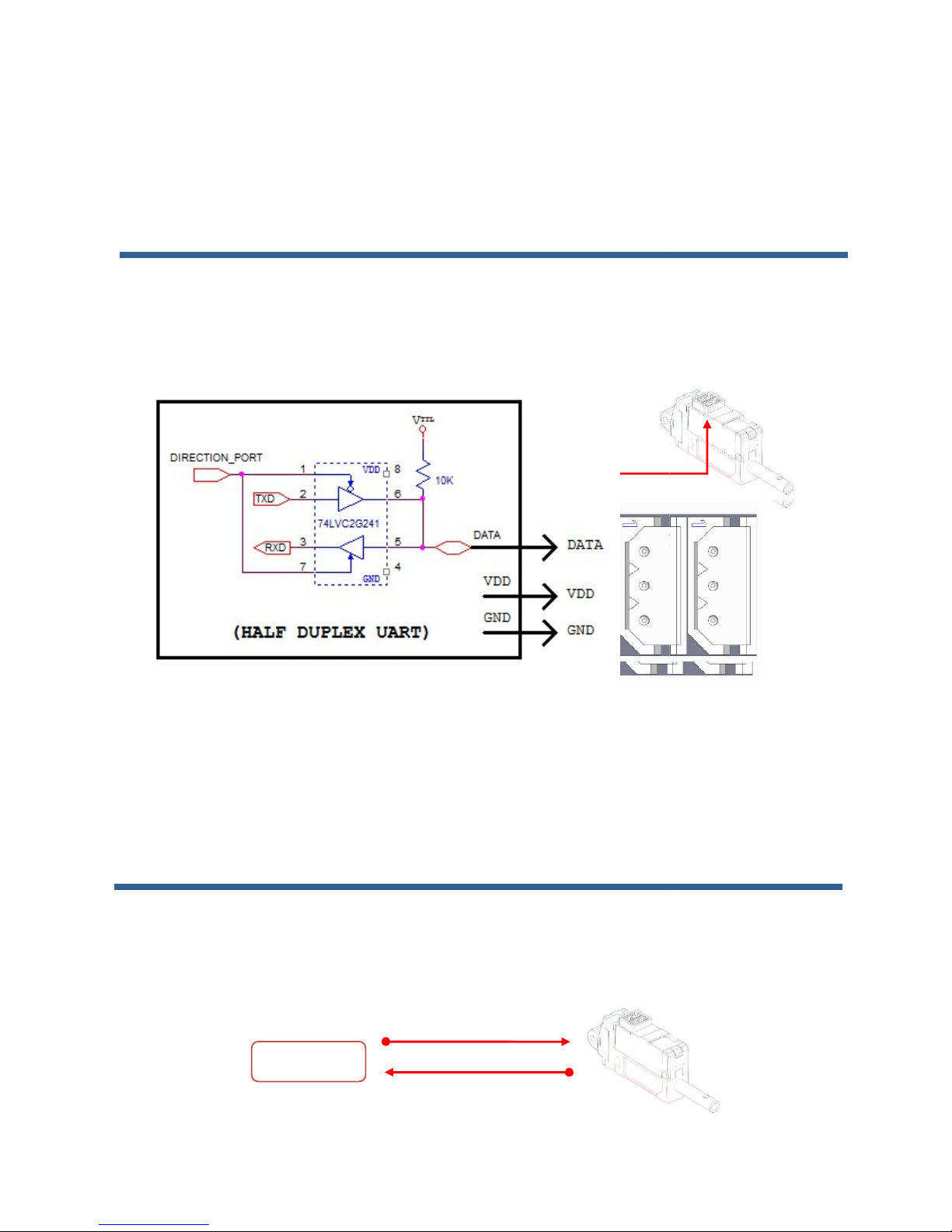
4.1. Circuit Connection
mightyZAP supports both data communication(Half Duplux
under data communication, UART signal of main board should be converted into Half Duplex Type signal.
Conversion circuit will be as below.
The direction of data signal for TxD and RxD
direction_port as below.
The level of "direction_port" is LOW : TxD signal will be outputted as Data.
The level of "direction_port" is HIGH :
4.2. Communication
mightyZAP and your main controller will communicate by exchanging data packet. The sorts of
Command packet (Main controller to mightyZAP) and Feedback packet(mightZAP to your main controller)
4
Servo Control
Main
Controller
2
8
TTL) as well as simple pulse(PWM) control. For the control
of TTL level will be determined according to the level of
: Data signal will be inputted to RxD.
Feedback Packet
Command Packet
packet are
Page 9

mightyZAP USER MANUAL V.1.02
9
(1) Specification
① Communication specification
2 Mode in One (Pulse / Data Mode Auto-Switching)
mightyZAP will automatically recognize the input signal between data mode and pulse mode.
Data Mode
Asynchronous Serial communication (8 bit, 1 Stop bit, None Parity)
Item Spec
Structure Half-duplex UART
Baud Rate 57600bps(default)
Data Size 8bit
Parity non-parity
Stop Bit One bit
Pulse Mode
PPM(Pulse Position Modulation) Compatible [ Radio-Control Servo Pulse Mode]
(500us(Retracted)~1500 us(Center)~2500 us(Fully Extended)
※ Short stroke : Retract stroke / Long stroke : Extend stroke
② Data specification
Data range is basically determined as below in both Data and Pulse modes. All factors are changeable &
programmable.
Rod Stroke Data Mode Pulse Mode
Short Stroke 0 900us
Half Stroke 2047 1500us
Long Stroke 4095 2100us
Short Stroke
(900us)
Long Stroke
(2100us)
Period
(4ms~25ms)
Start Point
(0us)
Page 10

mightyZAP USER MANUAL V.1.02
10
③ Daisy-Chain Connection
After receiving Command Packet at multiple qty of mightZAPs, the servo whose ID is N will be
operated only. (Only N ID servo will send Feedback packet and execute Command.)
Caution
Unique ID
Each mightZAP servo must have an individual ID to prevent interference between same IDs.
Therefore, you need to set individual IDs for each servo in the network node.
As factory default ID is 0, so please assign different, individual IDs for each servo. It will be easier if
you assign each ID when you connect each servo in Daisy-chain network one by one.
ID=1
ID=N
ID=0
Feedback
Packet(ID=N)
Command Packet(ID=N)
Main
Controller
Page 11

mightyZAP USER MANUAL V.1.02
11
(2) Packet Description
① Command Packet
It is command packets for servo operation. Its structure and elements are as below.
Structure
Element
Index Data Description
0 Start Byte 1 Start Byte 1 (0xFF)
1 Start Byte 2 Start Byte 2 (0xFF)
2 Start Byte 3 Start Byte 3 (0xFF)
3 ID Servo ID (Range: 1 ~ 253, Broadcast ID: 254, Stand-alone ID: 0)
4 SIZE Packet Size (COMMAND+FACTOR+CHECKSUM)
5 COMMAND Instruction
5+1 FACTOR #1 First Parameter
5+m FACTOR #m "m"th Parameter
5+N FACTOR #N Last Parameter
5+N+1 Check Sum
Check Sum = BinaryInvert( LOWER_BYTE( ID + SIZE +
COMMAND + FACTOR#1 + … + FACTOR#N ) )
Element Description
1. HEADER (3Byte)
Code to recognize Packet start : 0xFFFFFF
2. ID (1Byte)
The ID is an unique number of each servo to support Daisy Chain connection.
Factory default value(ID) is 0.
In case of ID = 0, it will be deemed as stand-alone(single) connection and communicate
regardless of ID. (except for Echo, Load Data)
In case of ID = 1 ~253, ID "N" which is stored in the servo will be operated.
In case of ID = 254 (0xFE), it is operated under "Broadcasting Mode (move all servos)" and
Feedback Packet does not work.
3. SIZE (1Byte)
Packet length in Byte unit
Data counting value after "Size" data (COMMAND+FACTOR+CHECKSUM)
That is, Size value = Number of byte of "Factor" + 2
Start Byte 1
(0xFF)
Start Byte 2
(0xFF)
Start Byte 3
(0xFF)
ID
SIZE
(0 ~ 255)
COMMAND
(0 ~ 255)
FACTOR
#1
FACTOR #mFACTOR
#N
CHECKSUM
Page 12

mightyZAP USER MANUAL V.1.02
12
4. COMMAND (1Byte)
Command codes defining the purpose of Packet
5. FACTOR
Additional Packet factor according to Command
6. CHECKSUM
Verification data to check omission and any changes of Packet data. The interaction
formula will be as below.
Checksum = BinaryInvert( LOWER_BYTE( ID + SIZE + COMMAND + FACTOR#1 + … +
FACTOR#N ) )
② Feedback Packet
After reception of command packet, servo sends Feedback packet including requested
information. Its structure and factors are as below.
Structure
Element
Index Data Description
0 Start Byte 1 Start Byte 1 (0xFF)
1 Start Byte 2 Start Byte 2 (0xFF)
2 Start Byte 3 Start Byte 3 (0xFF)
3 ID Servo ID (Range: 1 ~ 253, Broadcast ID: 254, Stand-alone ID: 0)
4 SIZE Packet Size (COMMAND+FACTOR+CHECKSUM)
5 ERROR Error Code
5+1 FACTOR #1 First Parameter
5+m FACTOR #m "m"th Parameter
5+N FACTOR #N Last Parameter
5+N+1 Check Sum
Check Sum = BinaryInvert( LOWER_BYTE( ID + SIZE + ERROR +
FACTOR#1 + … + FACTOR#N ) )
Start Byte 1
(0xFF)
Start Byte 2
(0xFF)
Start Byte 3
(0xFF)
ID
SIZE
(0 ~ 255)
ERROR
FACTOR #1FACTOR #mFACTOR
#N
CHECKSUM
Function CODE Description
Echo 0xF1 Feedback Packet Reception
Load Data 0xF2 Send "Address" and get feedback of Data
Store Data 0xF3 Send "Address" and "Data". Then Save.
Send Data 0xF4 Send "Address" and "Data" for temporary storage
Execution 0xF5 Execute temporarily stored data that is made by SendData.
Factory Reset 0xF6 Reset to Factory default parameter value
Restart 0xF8 Restart servo system
Symmetric Store 0x73 Store data in the same address of multiple qty servos.
Page 13

mightyZAP USER MANUAL V.1.02
13
Element Description
1. HEADER (3Byte)
Recognizing "Packet start" code. 0xFFFFFF
2. ID (1Byte)
Individual ID number for each servo (1 ~253)
3. SIZE (1Byte)
Packet length in Byte unit
Data counting value after "Size" data (ERROR+FACTOR+CHECKSUM)
That is, Size value = Number of byte of "Factor" + 2
4. ERROR (1Byte)
Error status during operation for each bit
Error bit Description LED
RESERVED 7 TBD LED Off
Instruction Error
6
In case that undefined instruction is sent, or Execution
command is sent without Send Data command, it will be set as
"1".
White
Overload Error
5
In case that current load cannot be controlled with the
designated maximum force, it will be set as "1".
Cyan
Checksum Error
4
In case that transferred Checksum packet value is not correct,
it will be set as "1".
Magenta
Range Error
3
In case that the command is out of Data Map address range, it
will be set as "1".
Blue
Overheating Error
2
In case that the inner temperature is out of operating
temperature range which is designated in the Control table, it
will be set as "1".
Yellow
Stroke Limit Error
1
In case that the goal position is written out of range between
PULL Stroke Limit and PUSH Stroke Limit, it will be set as "1".
Green
Input Voltage Error
0
In case that the input voltage is out of operating voltage range
designated in the Control table, it will be set as "1".
Red
5. FACTOR
Additional Packet factor according to Feedback data.
6. CHECKSUM
Verification data to check omission and any changes of Packet data. The interaction formula will be
as below.
Checksum = BinaryInvert( LOWER_BYTE( ID + SIZE + ERROR + FACTOR#1 + … + FACTOR#N ) )
Page 14

mightyZAP USER MANUAL V.1.02
14
(3) Data Map
① Data Memory Map
Memory using data (Non-volatile)
Data to be saved in non-volatile memory which maintain data even after power OFF/ON.
All data will be reset to default value when Factory Reset command is executed.
Address Name Description Access Default
0 (0x00) Model Number(L)
Low byte of model
number
R
1 (0x01) Model Number(H)
High byte of model
number
R
2 (0x02) Version of Firmware
Firmware version info.
R -
3 (0x03) ID
Servo ID
RW 0 (0x00)
4 (0x04) Baud Rate
Servo communication
speed
RW 32 (0x20)
5 (0x05) Return Delay Time
Return delay time
RW 250 (0xFA)
6 (0x06) Short Stroke Limit(L)
Low byte of Retract
direction limit value.
RW 0 (0x00)
7 (0x07) Short Stroke Limit(H)
High byte of Retract
direction limit value.
RW 0 (0x00)
8 (0x08) Long Stroke Limit(L)
Low byte of Extension
direction limit value.
RW 255 (0xFF)
9 (0x09) Long Stroke Limit(H)
High byte of Extension
direction limit value.
RW 15 (0x0F)
11 (0x0B)
the Highest Limit
Temperature
High temp limit
RW 80 (0x50)
12 (0x0C) the Lowest Limit Voltage
Low temp limit
RW
individual
SPEC
13 (0x0D) the Highest Limit Voltage
Highest limit of voltage
RW
individual
SPEC
14 (0x0E) Max Force(L)
Low byte of max force
RW 255 (0xFF)
15 (0x0F) Max Force(H)
High byte of max force
RW 3 (0x03)
16 (0x10) Feedback Return Mode
Feedback return mode
RW 2 (0x02)
17 (0x11) Alarm LED
Alarm LED function
RW 36 (0x24)
18 (0x12) Alarm Shutdown
Alarm Shut Down
function
RW 36 (0x24)
22 (0x16) Resolution Factor
Resolution setting factor
RW 1 (0x01)
30 (0x1E) Third-party Program
Interface (L)
Low byte of third party
program compatibility
interface
RW 54 (0x36)
31 (0x1F) Third-party Program
Interface (H)
High byte of third party
program compatibility
interface
RW 1 (0x01)
32 (0x20) Third-party Program
Firmware Version
Firmware version of third
party program
compatibility software
RW 37(0x25)
37 (0x25) D Gain
Derivative Gain
RW individual
SPEC
Page 15

mightyZAP USER MANUAL V.1.02
15
38 (0x26) I Gain
Integral Gain
RW individual
SPEC
39 (0x27) P Gain
Proportional Gain
RW individual
SPEC
40 (0x28) Short Stroke Pulse Width
(L)
Low byte of Retract
direction pulse width
RW 132 (0x84)
41 (0x29) Short Stroke Pulse Width
(H)
High byte of Retract
direction pulse width
RW 3 (0x03)
42 (0x2A) Long Stroke Pulse Width (L)
Low byte of Extension
direction pulse width
RW 52 (0x34)
43 (0x2B) Long Stroke Pulse Width
(H)
High byte of Extension
direction pulse width
RW 8 (0x08)
44 (0x2C) Middle Stroke Pulse Width
(L)
Low byte of middle
stroke pulse width
RW 220 (0xDC)
45 (0x2D) Middle Stroke Pulse Width
(H)
High byte of middle
stroke pulse width
RW 5 (0x05)
50 (0x32) Center Difference (L)
Low byte of Zero point
adjustment value
RW
255 (0xFF)
51 (0x33) Center Difference (H)
High byte of Zero point
adjustment value
RW
7 (0x07)
52 (0x34) Punch Initial Value(L)
Low byte of Punch initial
value
RW individual
SPEC
53 (0x35) Punch Initial Value(H)
High byte of Punch initial
value
RW individual
SPEC
② Parameter Map
Parameter Using Data (Volatile)
All data to be reset to default value whenever power is On.
Address Name Description Access
Default
0 (0x80) Force ON/OFF Force On/ Off RW 0 (0x00)
1 (0x81) LED LED On/Off RW 0 (0x00)
2 (0x82)
Short Stroke Compliance
Margin
Compliance margin of
Retract direction
RW 4 (0x04)
3 (0x83)
Long Stroke Compliance
Margin
Compliance margin of
Extension direction
RW 4 (0x04)
6 (0x86) Goal Position(L)
Low byte of Goal position
value
RW -
7 (0x87) Goal Position(H)
High byte of Goal position
value
RW -
8 (0x88) Moving Speed(L)
Low byte of Moving speed
value
RW -
9 (0x89) Moving Speed(H)
High byte of Moving speed
value
RW -
10 (0x8A) Force Limit(L) Low byte of max force limit
RW Max Force(L)
11 (0x8B) Force Limit(H)
High byte of max force
limit
RW Max Force(H)
12 (0x8C) Present Position(L)
Low byte of present
position value
R -
Page 16

mightyZAP USER MANUAL V.1.02
16
13 (0x8D) Present Position(H)
High byte of present
position value
R -
14 (0x8E) Present Speed(L)
Low byte of present speed
value
R -
15 (0x8F) Present Speed(H)
High byte of present speed
value
R -
16 (0x90) Present Load(L)
Low byte of present load
value
R -
17 (0x91) Present Load(H)
High byte of present load
value
R -
18 (0x92) Present Voltage Current voltage R -
19 (0x93) Present Temperature Current temperature R -
20 (0x94) Received Data
Reception status for "Send
Data"
R 0 (0x00)
22 (0x96) Moving Moving status R 0 (0x00)
23 (0x97) Lock
Lock for Non-volatile
Memory
RW 0 (0x00)
24 (0x98) Punch(L) Low byte of Punch value RW
Punch Initial
Value(L)
25 (0x99) Punch(H) High byte of Punch value RW
Punch Initial
Value(H)
Page 17

mightyZAP USER MANUAL V.1.02
17
(4) Command Example Packet
1) Echo Receiving Feedback Packet
Command Packet
HEADER ID Size Command Checksum
0xFFFFFF 0x00 0x02 0xF1 0x0C
- Command packet to recognize status of servo connection.
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x00 0x02 0x00 0xFD
- Feedback packet to inform status of servo connection. (including Error information)
2) Load Data Sending Address and receiving data feedback
Command Packet
HEADER ID Size Command Factor #1 Factor #2 Checksum
Address Length
0xFFFFFF 0x00 0x04 0xF2 0x8C 0x02 0x7B
- Command packet to read current position value of servo
Feedback Packet
HEADER
ID Size Error Factor #1 Factor #2 Checksum
0xFFFFFF
0x00 0x04 0x00 0xFF 0x07 0xF5
- Feedback packet to inform current servo position value 2047(0x07FF).
3) Store Data Store data after sending Address and Data
Command Packet ( ID Change )
HEADER ID Size Command Factor #1 Factor #2 Checksum
Address Data
0xFFFFFF 0x00 0x04 0xF3 0x03 0x01 0x04
- Command packet designating Servo ID as ‘1’(0x01).
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x01 0x02 0x00 0xFC
- Feedback packet informing Servo ID is changed.
Command Packet (Goal Position)
HEADER ID Size Command Factor #1 Factor #2 Factor #3 Checksum
Address Data #1 Data #2
0xFFFFFF 0x01 0x05 0xF3 0x86 0xFF 0x07 0x7A
- Command packet designating Servo goal position as 2047(0x07FF).
Page 18

mightyZAP USER MANUAL V.1.02
18
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x01 0x02 0x00 0xFC
- Feedback packet informing receipt of servo's goal position command.
4) Send Data Send "Address" and "Data", Then temporarily store it.
Command Packet
HEADER ID Size Command Factor #1 Factor #2 Factor #3 Checksum
Address Data #1 Data #2
0xFFFFFF 0x01 0x05 0xF4 0x86 0xFF 0x07 0x79
- Command packet for temporary store of goal position as 2047(0x07FF).
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x01 0x02 0x00 0xFC
- Feedback packet informing receipt of temporary store for servo goal position.
5) Execution Execute temporarily stored data that is made by Send Data.
Command Packet
HEADER ID Size Command Checksum
0xFFFFFF 0x01 0x02 0xF5 0x07
- Command packet to execute all temporarily stored data at the same time.
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x01 0x02 0x00 0xFC
- Feedback packet informing receipt of execution command for temporarily stored data.
6) Factory Reset Reset to factory default parameter value.
Command Packet
HEADER ID Size Command Factor Checksum
Option
0xFFFFFF 0x01 0x03 0xF6 0x01 0x04
- Basic parameter (Memory & Parameter) to be reset to Default value. Additional Reset to be determined according to
options.
- Servo ID to be reset to 0(ID Default) and Baud Rate to be maintained
current status.
- If concerned bit is "1", it means Reset. If it is "0", it means Hold.
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x01 0x02 0x00 0xFC
- Feedback packet informing receipt of Factory reset.
Option bit
Description
Servo ID 0 Reset servo ID to 0
Baud Rate 1 Reset to 32 (57600 bps)
Page 19

mightyZAP USER MANUAL V.1.02
19
7) Restart Servo system Restart
Command Packet
HEADER ID Size Command Checksum
0xFFFFFF 0x00 0x02 0xF8 0x05
- Command packet to reboot servo system.
Feedback Packet
HEADER
ID Size Error Checksum
0xFFFFFF
0x00 0x02 0x00 0xFD
- Feedback packet informing receipt of Restart command of servo system
8) Symmetric Store Save data in the same address of multiple servos.
Command Packet (Goal Position)
HEADER ID Size Command Factor #1 Factor #2
Address Length
0xFFFFFF 0xFE 0x0A 0x73 0x86 0x02
Factor #3 Factor #4 Factor #5 Factor #6 Factor #7 Factor #8 Checksum
1> ID 1> Data #1 1> Data #2 2> ID 2> Data #1 2> Data #2
0x01 0xFF 0x03 0x02 0xFF 0x07 0xF1
- Command packet to designate goal positions of multiple servos at the same time.
- Synchronization for multiple servos without delay comparing to designating goal
position to each individual servo.
- Length (L) : The number of Data(Excluding ID of each servo) for factors of each servo.
- Size : (Factor+2) or 4+(L+1) X N (N:number of servo)
- Feedback Packet : No Feedback
ID Goal position
1 (0x01) 1023 (0x03FF)
2 (0x02) 2047 (0x07FF)
Page 20

mightyZAP USER MANUAL V.1.02
20
(5) Data Description
1) Model Number
The model number of MightyZAP
"Read" only to discriminate & recognize concerned model
2) Version of Firmware
Check if current firmware is the latest version.
3) ID
ID to discriminate each servo. Different IDs should be assigned in Daisy-Chain system.
In case of ID = 0, it will be deemed as stand-alone(single) connection and communicate
regardless of ID. (except for Echo, Load Data)
In case of ID = 1 ~253, ID "N" which is stored in the servo will be operated.
In case of ID = 254 (0xFE), it is operated under "Broadcasting Mode (move all servos)" and
Feedback Packet does not work.
4) Baud Rate
Determining communication speed. Default value is 57600bps
Servo system should be rebooted to apply changed baud rate to the servo.
[Setting Value]
Value Baud Rate(bps)
2 (0x02) 400000
4 (0x04) 250000
8 (0x08) 200000
16 (0x10) 115200
32 (0x20) 57600
64 (0x40) 19200
128 (0x80) 9600
Return Delay Time
Delay time to receive feedback packet after sending Command packet. (Unit : µs)
Page 21

mightyZAP USER MANUAL V.1.0
5) Stroke Limit
Stroke limit between
Short Stroke
(Range: 0 ~ 4095 )
6) The
Highest Limit Temperature
Temperature limitation of servo inner space.
The Highest / Lowest Limit Voltage
Max/Min. value of input voltage
For
the servo with
For the servo with 12V input voltage :
7) Max Force
Maximum force value.
0
manes force OFF and
When power is ON, it will be copied to
initial value.
8)
Feedback Return Mode
Feedback packet return mode after receipt of Command
Mode
Feedback Packet Return
0
Do NOT sending Feedback packet for a
command
1
Sending Feedback packet only for
2
Sending Feedback packet
※ Under
Broadcast ID(0xFE)
Feedback Return Mode
2
21
(A) and Long Stroke (C)
which is the max/min. value of
(Based on the Temp sensor on
Micom)
(unit : 0.1V)
7.4V input voltage :, 6V ~ 8.6V
9V ~ 13V
1023 is max force.
Force Limit(
ADDR: 0x8A|0x8B)
Packet
or NOT
ll Commands. (
Except for
)
Load Data Command.
for all Commands.
mode, feedback packet will NOT be sent regardless
.
A
B C
Goal Position.
and will be used as
Echo
values of
Page 22

mightyZAP USER MANUAL V.1.02
22
9) Alarm LED
If concerned bit is set as "1" when error occurs, LED indication will be activated.
Error bit LED Indicate
RESERVED 7 LED Off
Instruction Error 6 White
Overload Error 5 Cyan
Checksum Error 4 Magenta
Range Error 3 Blue
Overheating Error 2 Yellow
Stroke Limit Error 1 Green
Input Voltage Error 0 Red
In case that different errors are made at the same time, lower bit has a priority.
If Error is resolved, alarm will be deactivated after 2 sec and turns to previous status.
10) Alarm Shutdown
Force will be OFF if concerned bit is set as "1" when error occurs.
Error bit
RESERVED 7
Instruction Error 6
Overload Error 5
Checksum Error 4
Range Error 3
Overheating Error 2
Stroke Limit Error 1
Input Voltage Error 0
11) Resolution Factor
Changing motor resolution
Factor Resolution
1 4096
2 2048
3 1024
4 512
12) Calibration Stroke
Calibration Short Stroke : Short Stroke calibration value, Short Stroke Calibration value which is
set at the factory will be saved.
Calibration Long Stroke : Long Stroke calibration value, Long Stroke Calibration value which is
set at the factory will be saved.
Calibration Center Stroke : Half Stroke calibration value, Half Stroke Calibration value which is
set at the factory will be saved.
Page 23

mightyZAP USER MANUAL V.1.02
23
13) Third-Party Program Interface / Firmware Version
Program interface format setting factor for 3rd party program
Set as below according to 3rd party program's Resolution factor.
Resolution Resolution Factor Program Interface Firmware Version
4096 1 310 37 or higher
1024 3 12 25 or higher
14) Short / Long Stroke Pulse Width
Pulse width setting for retract / extend position(Unit : µs). Setting Range is 900us ~ 2100us.
Rod Stroke Goal Position (Based on Resolution 4096) Default Setting
Short Stroke 0 900us
Half Stroke 2047 1500us
Long Stroke 4095 2100us
15) Center Difference
Zero point adjusting value of the center point. Setting range is within the Stroke Limit.
16) Force ON/OFF
Setting for Force On and OFF ( 0 : OFF, 1 : ON)
value
Description
0 Cut off power to the motor and Force is OFF.
1 Power to be supplied to the motor and Force is ON.
17) LED
Control LED when there is no Error indication.
bit Description
0 LED Disable ( All LEDs will be Off when it is 1.)
1 RED LED Control
2 GREEN LED Control
3 BLUE LED Control
18) Stroke Compliance Margin
Setting for flexibility of motor control. It is the difference between a goal position and a
present position. If it is too big, Dead Band will get bigger which means positional accuracy
will be bad. If it is too small, servo will trembles.
19) Goal Position
Goal position value which is desired position value to move.
Rod Stroke Resolution
4096 2048 1024
Short Stroke 0 0 0
Page 24

mightyZAP USER MANUAL V.1.02
24
Half Stroke 2047 1023 511
Long Stroke 4095 2047 1023
Resolution can be adjusted according to Resolution Factor setting.
20) Moving Speed
Moving speed setting.
Range is between 0~1023. The higher value, the faster speed.
(But, 0 means the Maximum speed.)
When power is ON, it will be initialized to "0".
21) Force Limit
Force limit setting.
Range is between 0~1023. The higher value, the higher force.
When power is ON, it will be initialized to Max Force(ADDR: 0x0E|0x0F)..
22) Present Position
Current Position value of stroke.
Range is between 0~4095 and the value will be varied according to Resolution Factor
setting.
23) Present Speed
Current proportional speed.
Range is between 0~2047.
Between 0~1023, The speed is on Short Stroke direction (retract direction).
Between 1024~2047, The speed is on Long Stroke direction (extend direction).
24) Present Load
Current load value
To be shown in the range of 0~2047
Between 0~1023: Load is on short stoke direction(retract direction).
Between 1024~2047: Load is on long stoke direction(extend direction).
25) Present Voltage
Current input voltage. The unit is 0.1V
For instance, 74 means 7.4V
26) Present Temperature
Current temperature of servo inner space. The unit is 1 ˚C.
For instance, 85 means 85℃.
27) Received Data
Send Data command reception status for Execution command.
Page 25

mightyZAP USER MANUAL V.1.02
25
Value Description
0 Send Data command is NOT received.
1 Send Data command is received.
28) Moving
Moving status
Value Description
0 Goal Position command execution is completed.
1 Goal Position command execution is under operation.
29) Lock
30) Punch
Minimum current to the motor during the operation.
Higher Punch value increase stall torque, but chattering can be made if punch value is
too high.
Value Description
0 Non-volatile Memory Modification available
1 Non-volatile Memory Modification Unavailable
Page 26

mightyZAP USER MANUAL V.1.02
26
5.1. Warranty & Service
The warranty period of mightZAP is 1 year from the date of purchasing the goods. Please prepare some evidence
showing the date of purchase and contact your product supplier or IR Robot.
Warranty service will not cover the malfunctions of product which are derived from customer's abuse, mistake, or
carelessness (including normal wearing of gear train, tear of wire harness and motor burnt-out). Please kindly note that
all service should be processed by designated engineers and voluntary disassembly or maintenance may void warranty.
IR Robot Customer Service Team :
Tel : +82- 070-7600-9466
Address : (ZIP 14502) 1303, Bucheon Techno Park 401, Pyeongcheon-Ro 655, Wonmi-Gu, Gyeonggi-Do,
Korea.
E-mail : enigma@irrobot.com
Thank you.
5
Warranty Service
 Loading...
Loading...