

IO Industries High-Speed CMOS Area Scan Camera Series, CL Series, 2M360, 2M360MCL, 2M360CCL User Manual
...
TM
Flare
High-Speed CMOS Area Scan Camera Series
2M360 / 4M180
Camera Link
Revision 7.0
Copyright © 2011 IO Industries Inc. All rights reserved.
Flare is a pending trademark of IO Industries Inc.
User's Manual
2 Flare CL User's Manual
Notice
The material contained in this manual consists of information that is proprietary to IO
Industries Inc. and may only be used by the purchasers of the product and IO Industries Inc.
authorized distributors or resellers. IO Industries Inc. makes no warranty for the use of its
product and assumes no responsibility for any errors that may appear or for damages
resulting from the use of the information contained in this manual. IO Industries Inc. reserves
the right to make changes to this manual at any time without notice.
Warranty
The Flare CL product family is warranted for one (1) year from the date of purchase unless
otherwise agreed in writing. If the product proves to be defective during this warranty period,
IO Industries Inc. will, at its discretion, either repair or replace the product at no cost. In the
case where a new device is to be provided but the product has been discontinued, a product
with similar or better performance capabilities and features will be provided. This warranty
shall not apply to any damage, defect or failure caused by improper use or inadequate
maintenance of the product.
Certifications
FCC Class A Digital Device or Peripheral – Information to User
NOTE
This equipment has been tested and found to comply with the limits for a Class A digital
device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide
reasonable protection against harmful interference when the equipment is operated in a
commercial environment. This equipment generates, uses, and can radiate radio frequency
energy and, if not installed and used in accordance with the instruction manual, may cause
harmful interference to radio communications. Operation of this equipment in a residential
area is likely to cause harmful interference in which case the user will be required to correct
the interference at his own expense.
WARNING
Changes or modifications not expressly approved by IO Industries Inc. could void the user's
authority to operate the equipment.
CE Compliance
This equipment has been certified to conform to the requirements of Council Directive
89/336/EC for electromagnetic compatibility and to comply with the following European
Standards:
• Immunity: EN55024:1998, A1:2001
• Emissions: EN55022:1998 Class A / CISPR 22:1997
All IO Industries Inc. products bearing the CE mark have been declared to be in conformance
with the applicable EEC Council Directives. Note that the use of interconnect cables that are
not properly grounded and shielded may affect CE compliance.
IO Industries Inc. www.ioindustries.com Revision 8.0

3 Flare CL User's Manual
About IO Industries Inc.
Established in 1991, IO Industries Inc. designs high performance digital imaging products for
applications in manufacturing, research, vehicle-mounted systems, and video game content
creation. Products include PC-based, standalone and peripheral DVR systems; and high
speed CMOS area scan digital cameras.
Contact Information
IO Industries Inc.
12-1510 Woodcock St.
London, Ontario
N6H 5S1 CANADA
Tel: (519) 663-9570
Fax: (519) 663-9571
Website: www.ioindustries.com
Sales: sales@ioindustries.com
Technical Support: support@ioindustries.com
IO Industries Inc. www.ioindustries.com Revision 8.0

4 Flare CL User's Manual
Table of Contents
1 Introduction...............................................................................................................................6
1.1 Camera Highlights............................................................................................................6
1.2 Sensor Specifications.......................................................................................................7
1.3 Cover Glass Transmittance..............................................................................................8
1.4 Monochrome Spectral Response.....................................................................................9
1.5 Color Spectral Response................................................................................................10
1.6 Bayer Pattern..................................................................................................................10
2 Mechanical.............................................................................................................................11
2.1 Mechanical Specifications..............................................................................................12
2.2 Lens Adapter...................................................................................................................12
2.3 Power..............................................................................................................................13
2.4 External Triggers.............................................................................................................14
2.5 LED Status Indicator.......................................................................................................16
2.6 Camera Link Connection................................................................................................16
3 Camera Control......................................................................................................................20
3.1 Command Summary.......................................................................................................21
3.2 Camera Link Output Format...........................................................................................29
3.3 Image Windowing...........................................................................................................30
3.4 Image Sub-Sample.........................................................................................................33
3.5 Exposure Mode...............................................................................................................34
3.5.1 Free-run programmable exposure..........................................................................34
3.5.2 Edge-triggered programmable exposure................................................................35
3.5.3 Edge-triggered level-controlled exposure...............................................................36
3.5.4 Edge-triggered double exposure.............................................................................37
3.6 Frame Period and Exposure ..........................................................................................38
3.7 High Dynamic Range Modes..........................................................................................44
3.7.1 Interleaved HDR Exposure Mode............................................................................44
3.7.2 Piecewise HDR Exposure Mode.............................................................................45
3.8 Offset and Gain...............................................................................................................47
3.8.1 Digital Offset............................................................................................................47
3.8.2 Analog Gain.............................................................................................................47
3.8.3 ADC Ramp...............................................................................................................47
3.8.4 Digital Gain..............................................................................................................48
3.9 Image Flipping................................................................................................................49
3.10 White Balance..............................................................................................................50
3.10.1 Auto White Balance (AWB)...................................................................................50
3.10.2 Tracking White Balance (TWB)............................................................................50
3.11 Auto Exposure Control (AEC)......................................................................................51
3.12 AWB and AEC Zones...................................................................................................52
3.13 Look Up Table..............................................................................................................54
IO Industries Inc. www.ioindustries.com Revision 8.0

5 Flare CL User's Manual
3.14 Lens Control..................................................................................................................54
3.15 Test Pattern...................................................................................................................55
3.16 Sensor Artifacts.............................................................................................................59
3.16.1 Horizontal Line.......................................................................................................59
3.16.2 Black Sun..............................................................................................................60
3.17 Bad Pixel Replacement................................................................................................60
3.18 Temperature..................................................................................................................61
3.19 Command Memory.......................................................................................................61
3.20 Camera Reset...............................................................................................................63
3.21 Reduced Line Rate.......................................................................................................63
4 Control Utility..........................................................................................................................65
4.1 Installation.......................................................................................................................65
4.2 Connect to Flare.............................................................................................................65
4.3 General Tab....................................................................................................................67
4.4 Exposure Tab..................................................................................................................67
4.5 Image Tab.......................................................................................................................73
4.6 Balance Tab....................................................................................................................74
4.7 Windows Tab...................................................................................................................76
4.8 Miscellaneous Tab..........................................................................................................77
4.9 Lens Tab..........................................................................................................................78
5 Firmware Update Utility..........................................................................................................80
6 Document Revision History....................................................................................................82
7 Firmware Revision History.....................................................................................................84
8 Appendix A CL Plus/Plus10 Pinouts.......................................................................................86
IO Industries Inc. www.ioindustries.com Revision 8.0

6 Flare CL User's Manual
1 Introduction
The Flare CL series is a family of high-speed CMOS area scan cameras designed for a broad
range of applications. The following Flare CL camera models are covered in this manual:
Model Resolution Color Output Format
2M360MCL
2048 x 1088
2M360CCL Bayer
4M180MCL
2048 x 2048
4M180CCL Bayer
Table 1. Covered Flare CL models
Monochrome
Monochrome
1.1 Camera Highlights
➢ Camera Link Base, Medium, Full and Plus (80-bit) output configurations
➢ Full resolution max. 340 fps (8-bit), 180 fps (10-bit) - 2M360
➢ Full resolution max. 180 fps (8-bit), 150 fps (10-bit) - 4M180
➢ Pipelined global shutter with Correlated Double Sampling (CDS)
➢ High sensitivity with low noise
➢ Multiple High Dynamic Range (HDR) modes
➢ 10-bit ADC resolution (selectable 8/10-bit output)
➢ Programmable and triggered exposure controlled
➢ Multiple windows with up to 8 separate Regions Of Interest (ROI)
➢ Advanced Auto Exposure Control (AEC)
➢ User programmable Lookup Table (LUT)
➢ Image Sub-sampling
➢ Fixed pattern noise and black level correction
➢ Rugged aluminum case
➢ C-mount lens adapter, or optionally use T- or CS-mount
➢ Minimum exposure times of 19 µs
➢ Analog (up to 1.6x) and digital (up to 16x) gains
➢ Low power (~ 3 W @ 12 V), Power Over Camera Link (PoCL)
Camera Link
IO Industries Inc. www.ioindustries.com Revision 8.0
7 Flare CL User's Manual
1.2 Sensor Specifications
Specification 2M360 4M180
Sensor CMOSIS CMV2000 CMOSIS CMV4000
Effective Pixels 2048 x 1088 2048 x 2048
Optical Format 2/3" 1"
Pixel Pitch 5.5 x 5.5 µm
Full Well Charge 13.5 Ke-
Conversion Gain 0.075 LSB/e-
Sensitivity 4.64 V/lux.s
Temporal Noise 13 e-
Dynamic Range 60 dB
2
Parasitic Light Sensitivity < 1/50000
Fill Factor > 50% (with micro lenses)
Quantum Efficiency > 50% @ 550nm (with micro lenses)
Dark Current Signal 125 e-/s (at 25ºC)
DSNU 3 LSB/s (10-bit)
Fixed Pattern Noise < 1 LSB RMS (10-bit)
PRNU < 1% of signal
Cover Glass Plain D263
Bad Columns
( > 100 pixels)
Bad Rows
( > 100 pixels)
Bad Pixels
Dark Image: > 6 x FPN Value
Bright Image: < 80% Swing
Table 2. Sensor specifications
max. 100 max. 200
0
0
IO Industries Inc. www.ioindustries.com Revision 8.0
8 Flare CL User's Manual
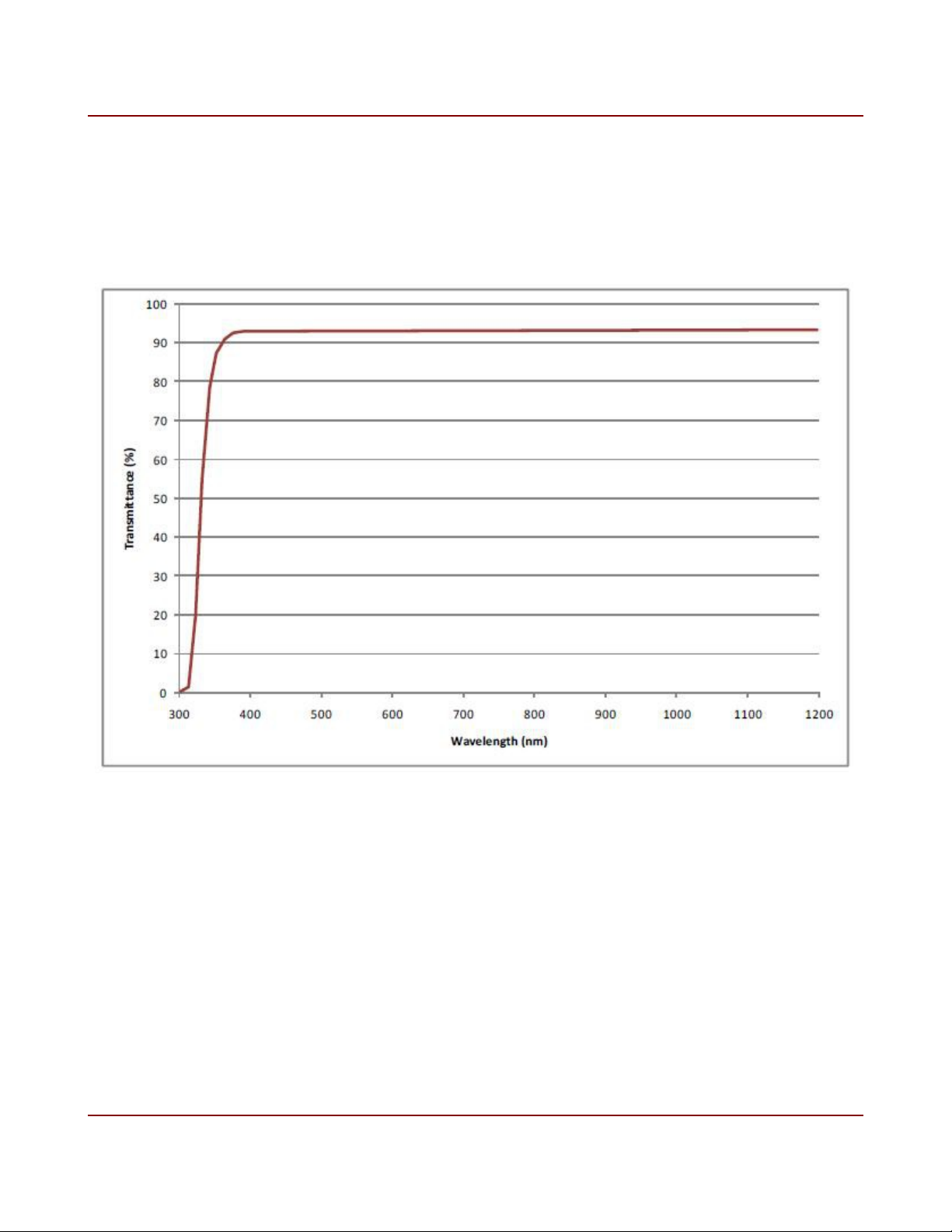
1.3 Cover Glass Transmittance
Plain D263 cover glass is used on all models. The glass transmittance is shown below. The
glass refraction index is 1.52.
Figure 1. Cover Glass Transmittance
IO Industries Inc. www.ioindustries.com Revision 8.0
9 Flare CL User's Manual
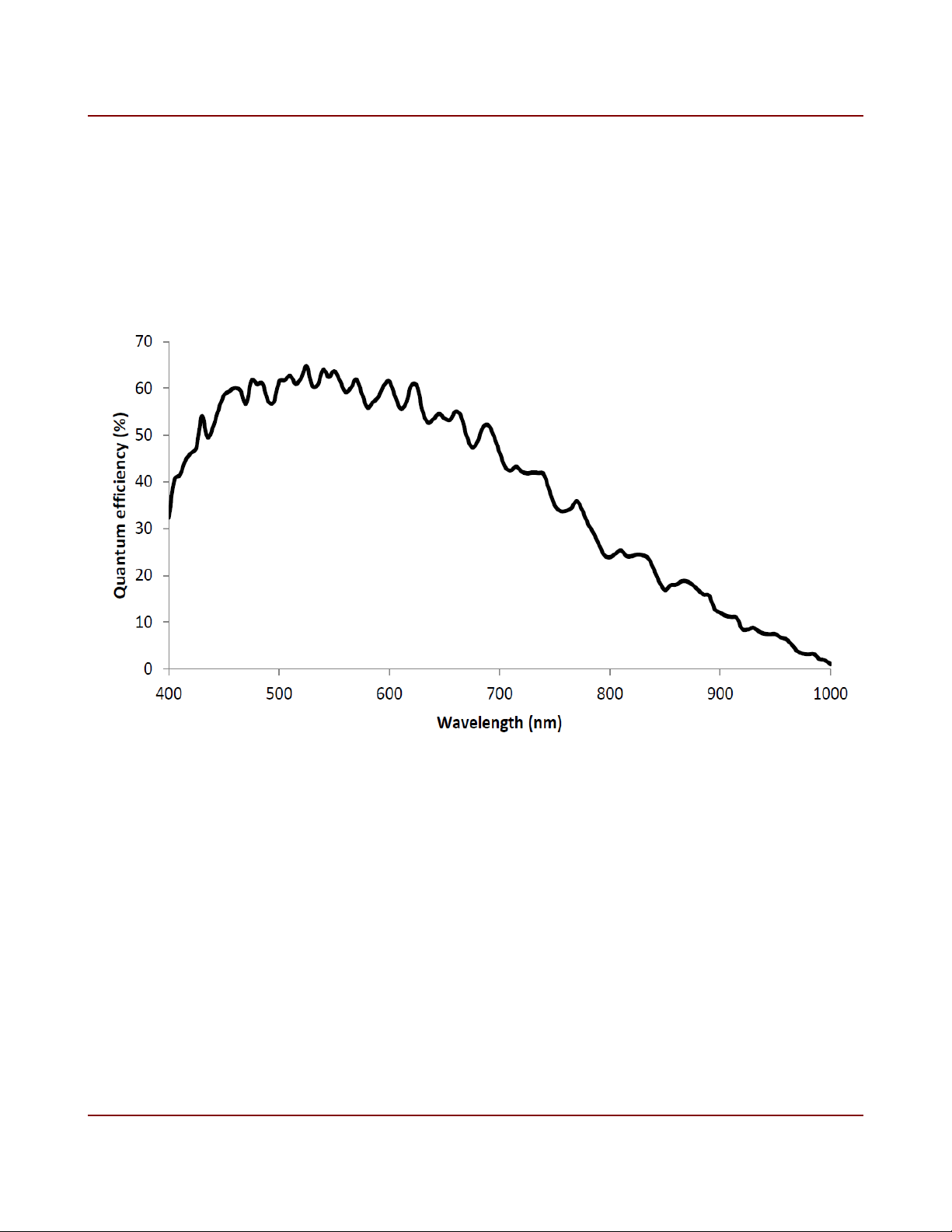
1.4 Monochrome Spectral Response
A typical spectral response of monochrome 2M360 and 4M180 cameras, with D263 cover
glass, is shown below.
Figure 2. Monochrome spectral response
IO Industries Inc. www.ioindustries.com Revision 8.0

10 Flare CL User's Manual
1.5 Color Spectral Response
A typical spectral response of color 2M360 and 4M180 cameras, with D263 cover glass and
color filters is shown below. Use an IR cut filter in the optical path to obtain good color
separation when using light with a NIR component. For most situations a filter which blocks
light above a wavelength of 675 nm produces the best results.
Figure 3. Color spectral response
1.6 Bayer Pattern
The 2M360 and 4M180 are both available in color. The Bayer pattern is shown in Figure 4.
G
Pixel
(1,1)
R
Pixel
(1,2)
Figure 4. Bayer color filter array pattern
IO Industries Inc. www.ioindustries.com Revision 8.0
B
Pixel
(2,1)
G
Pixel
(2,2)
11 Flare CL User's Manual
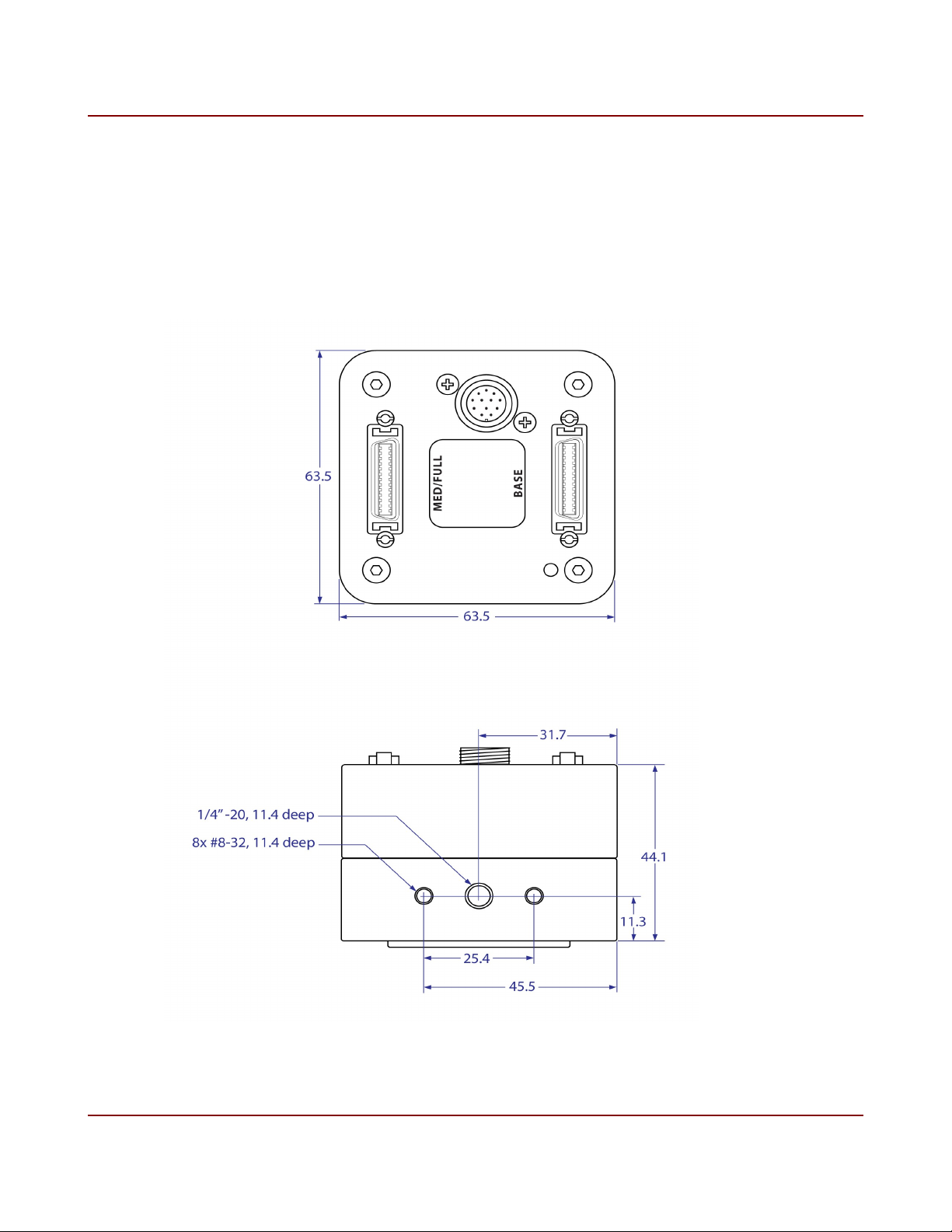
2 Mechanical
Camera housings are made with high precision from machined aluminum. Mechanical
drawings shown below.
Figure 5. Mechanical Drawings
IO Industries Inc. www.ioindustries.com Revision 8.0
12 Flare CL User's Manual
2.1 Mechanical Specifications
Summary of mechanical specifications shown below.
Specification Description
Size 63.5 mm x 63.5 mm x 44.1 mm
Weight 310 g
Mounting Holes Bottom - 1x 1/4"-20 (tripod)
All sides - 2 x #8-32, separation 1"
Power Connector 12-pin threaded Hirose
Mating connector part # HR10A-10TPA-12S(73)
Video Interface 2 x MDR26 Camera Link (standard)
Table 3. Mechanical specifications
Mounting holes on all sides of the camera, along with the image flipping feature, provides
many mounting options.
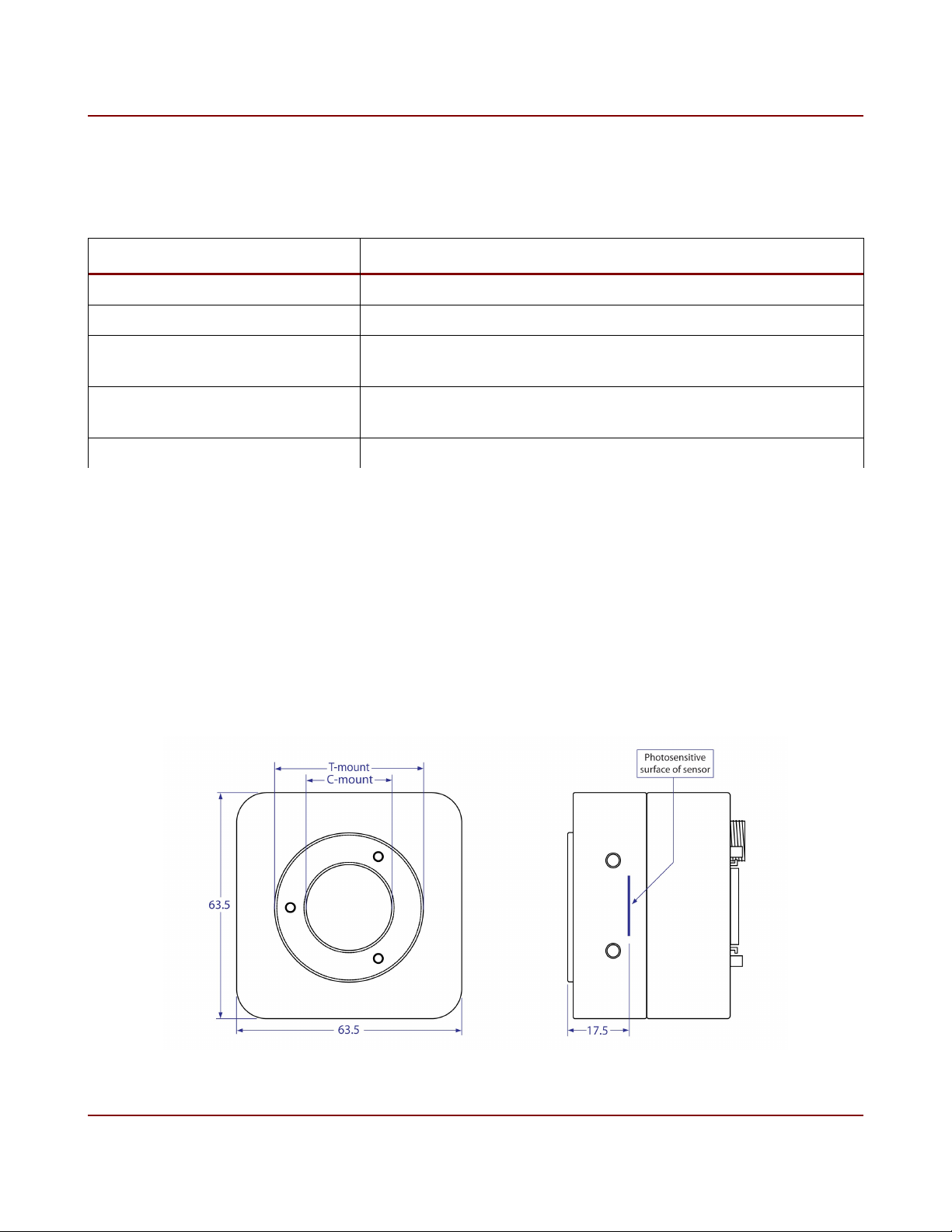
2.2 Lens Adapter
Aluminum C-mount lens adapter precisely calibrated to standardize focal length to sensor,
see Figure 6.
Figure 6. Lens adapter
IO Industries Inc. www.ioindustries.com Revision 8.0
13 Flare CL User's Manual
The position of the lens adapter is set using specialized equipment to ensure the proper back
focus of each camera. Three set screws (M2.5 - 1.3mm hex) on the front of the adapter are
used to firmly hold the ring adapter in place. In most cases it is not recommended to change
the position of the adapter ring. In rare cases the back focus can be adjusted to improve
image sharpness when using lower cost zoom lenses or custom optics.
The size of adapter ring is T-mount, with standard threading. It is possible to use a T-mount
extension tube with T-mount lenses; commonly Telephoto Zoom and Telescope lenses.
Between the adapter ring and the sensor there is another section of C-mount threading. With
a spacer this section can be used for a CS-mount lens. This section can also be used to
insert a filter in the optical path of the camera. An IR cut filter can be placed in a color camera
which will work with any lens type, avoiding the cost of having filters for every type of lens
used. Also a UV filter can be used which makes cleaning the camera easier, avoiding all
contact with the sensor glass itself. It is recommended to order the camera with the filter
in place, since the back focus changes with a filter installed, and it will be installed in a
clean environment. Contact IO Industries for filter options.
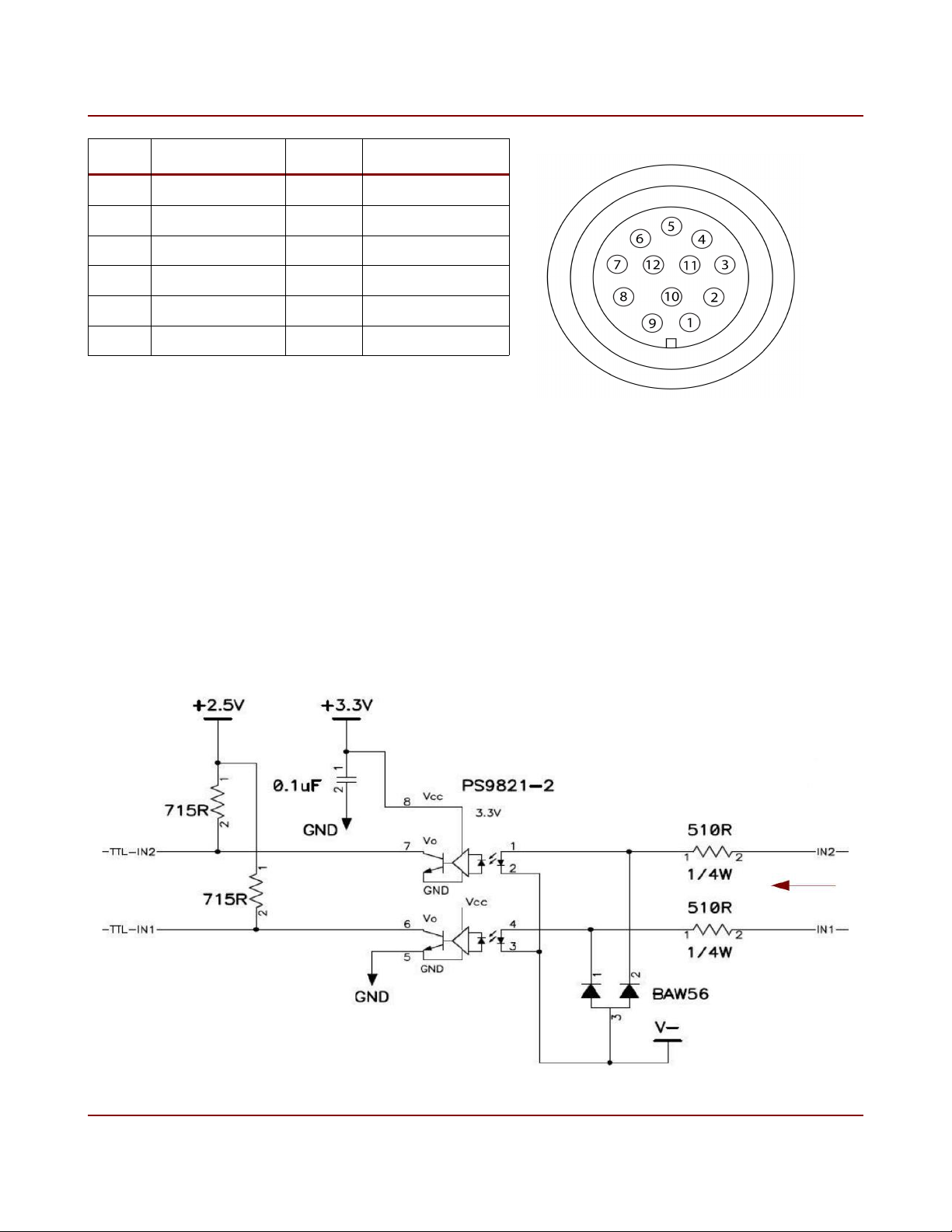
2.3 Power
Flare CL cameras are powered using a +12 V ± 10% DC power source. The power connector
is shown in Figure 7, and the pinout is shown in Table 4.
The camera can optionally be powered via 'Power Over Camera Link' (PoCL) from a
compliant frame grabber on the CL Base connector only. It is stongly recommended to
remove the power adapter from the camera power connector when using the camera in a
PoCL configuration. Applying power from both sources may damage the camera.
IO Industries Inc. www.ioindustries.com Revision 8.0
14 Flare CL User's Manual
Pin Description Pin Description
1 Trigger Input 1 7 Trigger Return
2 Trigger Input 2 8 Trigger VCC
3 12 V 9 Trigger Out 2
4 12 V 10 Trigger Out 1
5 GND 11 NC
6 GND 12 NC
Table 4. Power connector pinout
Figure 7. Power connector
2.4 External Triggers
There are two opto-isolated inputs on the power connector (pins 1 and 2). Only ground must
be provided as a reference for the inputs. The voltage range on the inputs is 4.5 to 7.5 V, and
the input delay is approximately 100 ns. The input current range is 6 to 12 mA per input. The
circuit diagram for the opto-isolated inputs is shown in figure 8.
Figure 8. Opto-isolated inputs circuit diagram
IO Industries Inc. www.ioindustries.com Revision 8.0
15 Flare CL User's Manual
The opto-isolated input circuit uses a high-speed photocoupler from Renesas Technology
Corporation, part # PS9821-2.
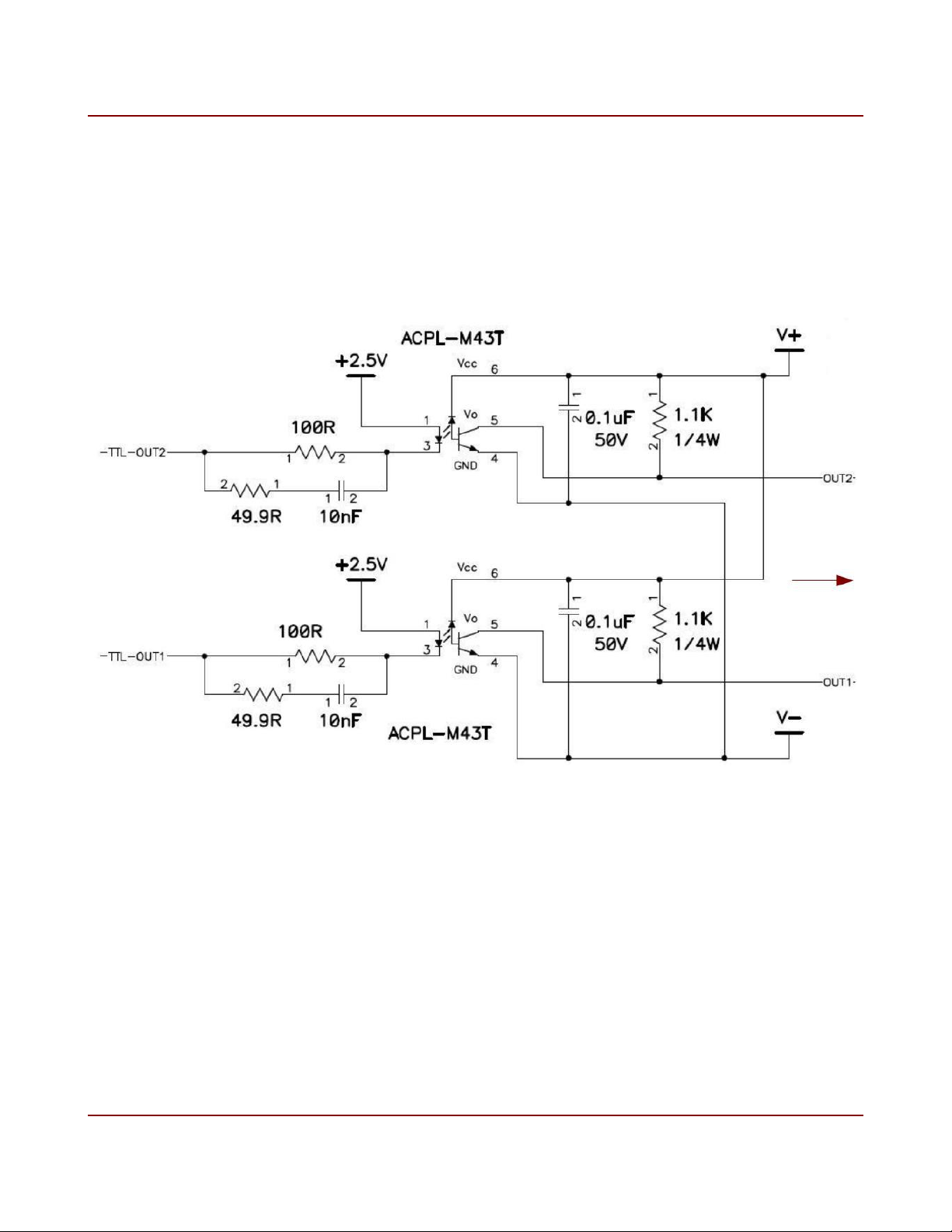
There are two opto-isolated outputs on the power connector (pins 10 and 9). Power (4.5 to
15 V) and ground must be provided for these outputs. The maximum output delay is
approximately 1 µs. An external pull-up reisistor is not required, but if one is used it must be
greater than 2 kΩ. The circuit diagram for the opto-isolated outputs is shown in figure 9.
Figure 9. Opto-isolated outputs circuit diagram
The opto-isolated output circuit uses a single channel high speed digital optocoupler per
output (Avago Technologies part # ACPL-M34T).
IO Industries Inc. www.ioindustries.com Revision 8.0
16 Flare CL User's Manual
2.5 LED Status Indicator
A tri-color (orange/green/red) LED on the back of the camera is used to indicate operational
status. Table 5 summarizes the operating states indicated by the LED.
LED State Description
Orange Camera is initializing (approximately 5-6 seconds after power is applied)
Green Camera is operational and functioning correctly
Flashing Green Executing long command
Flashing Red Error accessing user set memory
Red Fatal error
Table 5. LED status
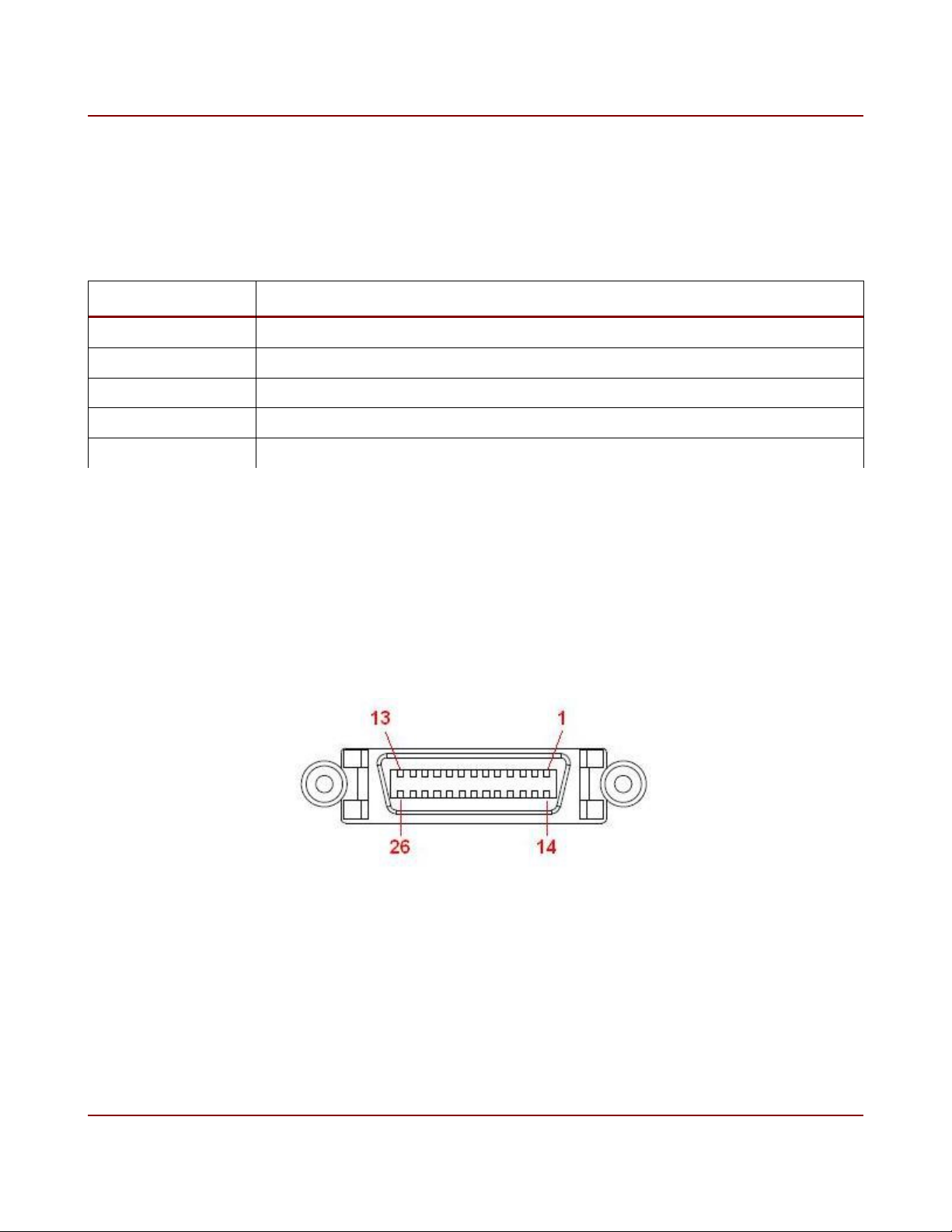
2.6 Camera Link Connection
The Flare CL camera series uses two standard 26-pin MDR connectors specified in the
Camera Link Specification. The female 26-pin MDR connectors used on the Flare CL
cameras is shown in Figure 10.
Figure 10. Camera Link 26-pin MDR connector
All pinouts and bit assignments are in accordance with the Camera Link specification. The
pin configuration for the base connector is shown in Table 6.
IO Industries Inc. www.ioindustries.com Revision 8.0
17 Flare CL User's Manual
Pin Designation Description Direction Pin Designation Description Direction
1 Inner Shield Cable Inner Shield N/A 14 Inner Shield Cable Inner Shield N/A
2 X0- Serial Data Output 15 X0+ Serial Data Output
3 X1- Serial Data Output 16 X1+ Serial Data Output
4 X2- Serial Data Output 17 X2+ Serial Data Output
5 XCLK- Pixel Clock Output 18 XCLK+ Pixel Clock Output
6 X3- Serial Data Output 19 X3+ Serial Data Output
7 SerTC+ Serial RX Input 20 SerTC- Serial RX Input
8 SerTFG+ Serial TX Output 21 SerTFG+ Serial TX Output
9 CC1- Camera Control Input 22 CC1+ Camera Control Input
10 CC2+ Camera Control Input 23 CC2- Camera Control Input
11 CC3- Camera Control Input 24 CC3+ Camera Control Input
12 CC4+ Camera Control Input 25 CC4- Camera Control Input
13 Inner Shield Cable Inner Shield N/A 26 Inner Shield Cable Inner Shield N/A
Table 6. CL Base connector pin configuration
The pin configuration for the medium/full connector is shown in Table 7.
Pin Designation Description Direction Pin Designation Description Direction
1 Inner Shield Cable Inner Shield N/A 14 Inner Shield Cable Inner Shield N/A
2 Y0- Serial Data Output 15 Y0+ Serial Data Output
3 Y1- Serial Data Output 16 Y1+ Serial Data Output
4 Y2- Serial Data Output 17 Y2+ Serial Data Output
5 YCLK- Pixel Clock Output 18 YCLK+ Pixel Clock Output
6 Y3- Serial Data Output 19 Y3+ Serial Data Output
7 - - - 20 - - -
8 Z0- Serial Data Output 21 Z0+ Serial Data Output
9 Z1- Serial Data Output 22 Z1+ Serial Data Output
10 Z2- Serial Data Output 23 Z2+ Serial Data Output
11 ZCLK- Pixel Clock Output 24 ZCLK+ Pixel Clock Output
12 Z3- Serial Data Output 25 Z3+ Serial Data Output
13 Inner Shield Cable Inner Shield N/A 26 Inner Shield Cable Inner Shield N/A
Table 7. CL Medium/Full connector pin configuration
IO Industries Inc. www.ioindustries.com Revision 8.0
18 Flare CL User's Manual
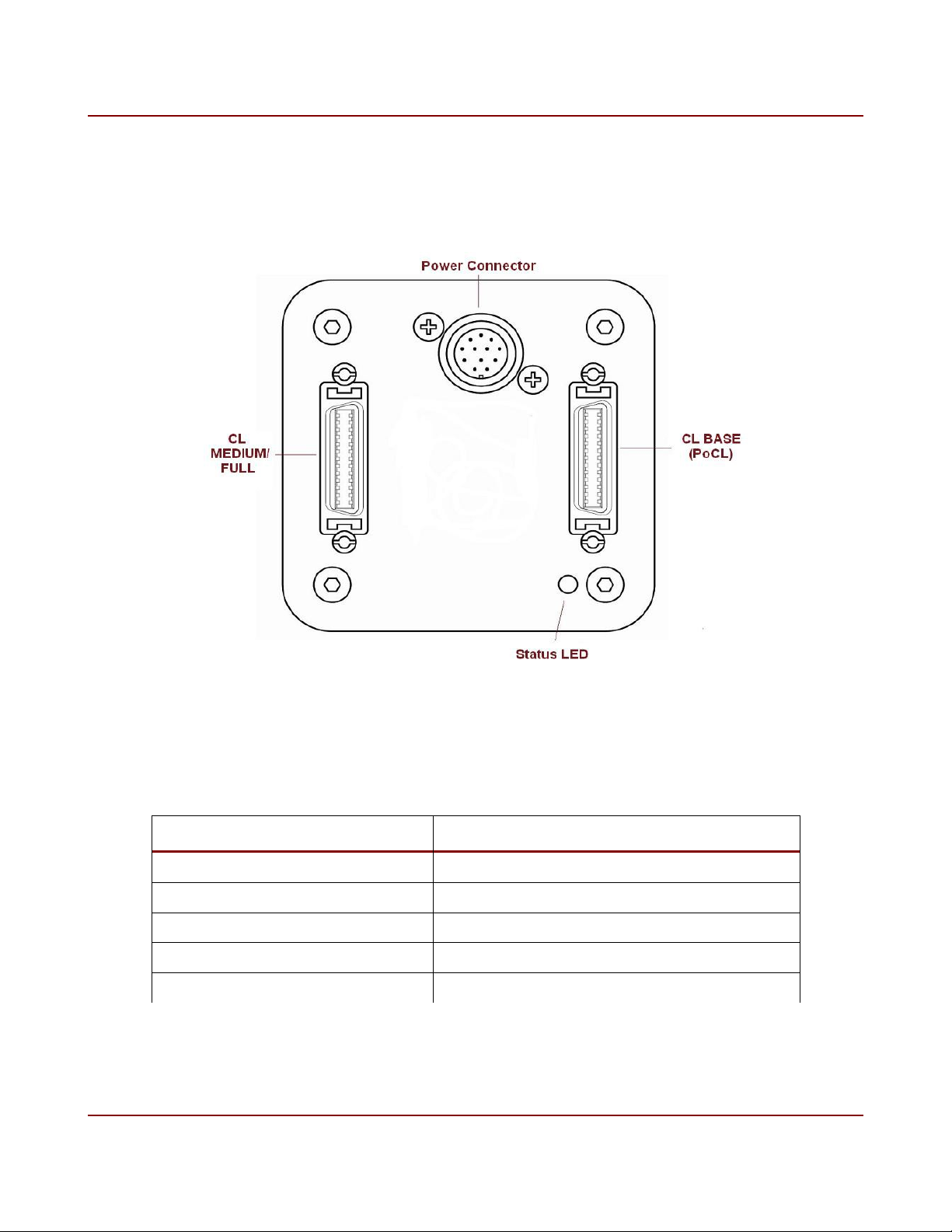
The CL Base connector is on the right hand side when looking at the back of the camera, with
the power connector at the top. The CL Medium/Full connector is on the left. Figure 11 shows
the back view of the camera.
Figure 11. Back view of Flare CL camera
The supported Camera Link output configurations are shown in Table 8.
Camera Link Configuration Output
Base 2x8-bit, 3x8-bit and 2x10-bit
Medium 4x8-bit and 4x10-bit
Full 8x8-bit
Plus10 (80-bit) 8x10-bit
Plus (80-bit) 10x8-bit
Table 8. Supported Camera Link configurations
IO Industries Inc. www.ioindustries.com Revision 8.0

19 Flare CL User's Manual
The camera supports the popular 80-bit extension to the Camera Link Specification. Camera
Link Plus throughout this manual will be referring to the 10x8-bit output configuration of the
camera. In addition to the CL Plus output format, the Flare CL camera also has an 8x10-bit
output configuration to reach higher speeds with a pixel depth of 10-bit. Throughout this
manual the 8x10-bit output mode will be referred to as CL Plus10. See Appendix A, Table
27, for the bit mapping of CL Plus. See Appendix A, Table 28, for the bit mapping of CL
Plus10.
The Camera Link pixel clock is 80 MHz.
IO Industries Inc. www.ioindustries.com Revision 8.0

20 Flare CL User's Manual
3 Camera Control
Control of the camera settings is done through the Camera Link serial port. A simple ASCII
protocol is used. Below are some key points about the serial control:
➢ 8-bit, 9600 baud (power-up default), 1 stop bit and no parity
➢ All sent commands end with a carriage return (0Dh), which can also be sent at any
time to reset the uart receiver state machine within the camera and return it to an
idle/ready state.
➢ Commands are 3 ASCII characters followed by the setting or simply a carriage return
when no settings are associated with the command.
➢ A space is sent between the command and the setting.
➢ All settings are in hexadecimal.
➢ All commands letters are in lower case (including settings hex values a-f).
➢ To query a command a carriage return is sent after the last command character.
➢ Successful commands return ACK (06h, generally seen as a dash (-) in terminal
programs), invalid or rejected commands return NAK (15h, generally seen as plus sign
(+) in terminal programs).
➢ A query returns the command, the current value, the minimum and maximum allowable
values within brackets, a carriage return and finally an ACK.
➢ Get camera parameters command (gcp) returns all command settings.
➢ Help command (hlp) returns list of all available commands and brief description.
Examples:
1 - Set frame period to 4000 µs (250 Hz):
Command: per 000fa0<CR>
Response: <ACK>
2 - Query frame period:
Command: per<CR>
Response: per 000fa0 (000b78,0f4240)<CR>
<ACK>
IO Industries Inc. www.ioindustries.com Revision 8.0
21 Flare CL User's Manual
3.1 Command Summary
Table 9 summarizes all available commands. The presence and size of a command's
parameters are shown with the letter 'Y' (see Format column). Each letter 'Y' represents a
hexadecimal digit from 0 to f.
Command Format Description Notes
CL Output
Format
Section 3.2
Number of
Windows
clf Y Camera Link output format CL Base: 0 - 2x8-bit, 1 - 2x10-bit, 2 -
3x8-bit
CL Medium: 3 - 4x8-bit, 4 - 4x10-bit
CL Full: 5 - 8x8-bit
CL Plus10: 6 - 8x10-bit
CL Plus: 7 - 10x8-bit
nwd Y Number of windows Up to 8 non-overlapping windows.
Section 3.3
Number of
Columns
Start Pixel 1 hs1 YYY Starting pixel for window 1 Step depends on CL output mode.
Line Start 1 vs1 YYY Starting line for window 1 Start line of image when only using 1
Number of
Lines 1
Start Pixel 2 hs2 YYY Starting pixel for window 2
hrx YYY Horizontal resolution Applies to all windows.
clf 0, 1, 3, 4, 5 and 6 - must be mod8
(010h-800h)
clf 2 - must be mod12 (018h-804h)
clf 7 - must be mod10 (014h-802h)
Start pixel of image when only using 1
window.
window.
Minimum number of lines is 4.
vr1 YYY Number of lines for window 1 Number of lines in image when only
using 1 window.
Line Start 2 vs2 YYY Starting line for window 2
Number of
Lines 2
Start Pixel 3 hs3 YYY Starting pixel for window 3
Line Start 3 vs3 YYY Starting line for window 3
Number of
Lines 3
Start Pixel 4 hs4 YYY Starting pixel for window 4
Line Start 4 vs4 YYY Starting line for window 4
vr2 YYY Number of lines for window 2
vr3 YYY Number of lines for window 3
IO Industries Inc. www.ioindustries.com Revision 8.0
22 Flare CL User's Manual
Command Format Description Notes
Number of
Lines 4
Start Pixel 5 hs5 YYY Starting pixel for window 5
Line Start 5 vs5 YYY Starting line for window 5
Number of
Lines 5
Start Pixel 6 hs6 YYY Starting pixel for window 6
Line Start 6 vs6 YYY Starting line for window 6
Number of
Lines 6
Start Pixel 7 hs7 YYY Starting pixel for window 7
Line Start 7 vs7 YYY Starting line for window 7
Number of
Lines 7
Start Pixel 8 hs8 YYY Starting pixel for window 8
Line Start 8 vs8 YYY Starting line for window 8
Number of
Lines 8
Image Sub-
Sample
vr4 YYY Number of lines for window 4
vr5 YYY Number of lines for window 5
vr6 YYY Number of lines for window 6
vr7 YYY Number of lines for window 7
vr8 YYY Number of lines for window 8
sub Y Image sub-sample Reduces output resolution by 1/4.
Section 3.4
Exposure Mode
Section 3.5
mde Y Exposure Modes:
0 - Free Run Programmable
Exposure
1 - External Trigger Programmable
Exposure
2 - External Trigger Level Exposure
3 - External Trigger Double
Exposure
Skip every second pixel and line (pairs
in color camera).
Does not modify hrx or vrx settings.
0 - off, 1 - on
High Dynamic
Range
Section 3.7
Frame Period per YYYYYY Frame period in microseconds Range of period depends on:
hdr Y High Dynamic Range mode 0 - Normal exposure
1 - Interleaved HDR mode
mde 0/1 - ex1 used for odd rows, ex2
used for even rows
mde 2/3 - not available
2 - Piecewise HDR mode
mde 2/3 - not available
- camera link configuration
- resolution
IO Industries Inc. www.ioindustries.com Revision 8.0
23 Flare CL User's Manual
Command Format Description Notes
Section 3.6
Exposure Time
1
ex1 YYYYYY Primary exposure time in
microseconds
Section 3.6
Exposure Time2ex2 YYYYYY Secondary exposure time in
microseconds
Exposure Time3ex3 YYYYYY Tertiary exposure time in
microseconds
Number of
Slopes
pns Y Number of Piecewise HDR slopes Placements of kneepoints in X direction
Section 3.7.2
Kneepoint 2 pv1 YY Kneepoint 2 voltage Sets kneepoint 2 voltage in Piecewise
Kneepoint 1 pv2 YY Kneepoint 1 voltage Sets kneepoint 1 voltage in Piecewise
Trigger Select 1 tr1 Y Select primary trigger 0 - CC1
- sub-sampling
Used in exposure modes 0 and 1.
Interleaved: exposure time of odd rows.
Piecewise: total exposure time.
Used in HDR modes only.
Interleaved: exposure of even rows.
Piecewise: kneepoint 1 exposure.
Piecewise: kneepoint 2 exposure.
is controlled by Vlow settings, and
slope of segments is controlled by
exposure times.
HDR mode
HDR mode
1 - CC2
2 - CC3
3 - CC4
4 - Opto-1
5 - Opto-2
Exposure Modes:
0 - not used
1 - Starts primary exposure
2 - Starts and sets exposure time
3 - Starts 'dark frame' exposure
Trigger
Edge/Level 1
Digital Offset
te1 Y Trigger 1 Edge/Level select 0 - Falling (mde 1), Low (mde 2)
1 - Rising (mde 1), High (mde 2)
off YYYY Dark level offset applied to output
signal
Dark Level = (70 + YYYY - 16383)
Section 3.8
Analog Gain
Section 3.8
Digital Gain
agn Y Analog gain applied by
Programmable Gain Amplifier (PGA)
in every column
dgn YYY Digital gain applied to sensor input
up to 16x
0 - x1 gain (default)
1 - x1.2
2 - x1.4
3 - x1.6
Range 16-256
Gain applied = (value)/16
Section 3.8
ADC Ramp adc YY ADC Ramp Range 24-59 (18-3Bh)
IO Industries Inc. www.ioindustries.com Revision 8.0
24 Flare CL User's Manual
Command Format Description Notes
Section 3.8
ADC Ramp
Voltage
Image Flipping
Section 3.9
Lookup Table lut Y Apply lookup table 0000 – off
AWB/AEC
Zone 1
AWB/AEC
Zone 2
rmp YY ADC Ramp Voltage Range 102-115 (66-73h)
Controls ramp generator starting
voltage for reset and pixel
measurements (CDS)
flp Y Image flipping in X and/or Y
direction
az1 YYYY Image divided into 64 zones (8x8).
Full image or selected zones can be
used for auto white balance and
auto exposure control. Commands
az1 - az4 are 'one-hot' enable bits
for the zones. Command az1
represents the first 16 zone (0-15),
starting in the top left (bit 0) of
image.
az2 YYYY Zones 16 (bit 0) - 31 0 - disable
0 - No image flipping
1 - Image flipping in X
2 - Image flipping in Y
3 - Image flipping in X and Y
0001 – LUT 1
0010 – LUT 2
0011 – LUT 3
0100 – LUT 4
0 - disable
1- enable
1- enable
AWB/AEC
Zone 3
AWB/AEC
Zone 4
Zone Overlay azo Y Overlay to show enabled zones.
White Balance
Multipliers
Tracking White
Balance
TWB Speed tws Y Adjusts the speed of auto white
AEC Minimum amn YYYY Minimum value for exposure used Range = (min ex1, amx)
az3 YYYY Zones 32 (bit 0) - 47 0 - disable
1- enable
az4 YYYY Zones 48 (bit 0) - 63 0 - disable
1- enable
0 - off
Disable zones are grey in overlay
(alpha blend with 10-bit pixel value
0x800).
wbm
BBBRRR
twb Y Adjusts red and blue multipliers
Two 2.10 unsigned fixed point
multipliers for blue and red pixels
(wbm) every frame to keep white
balance. Size of adjustments
depends on speed command (tws).
Current parameter values for wbm
are updated and can be queried.
balance multiplier changes
1- on
Individual multiplier range 0x001 - 0xfff
(0.00097 - 3.99902)
0 - off
1 - on, using full image
2 - on, using enabled zones
Range 0 (slowest) - 3 (fastest)
Default = 2
IO Industries Inc. www.ioindustries.com Revision 8.0
25 Flare CL User's Manual
Command Format Description Notes
Exposure by auto exposure control Minimum value equal to min of ex1
command. Maximum value equal to
current amx setting. When amn = amx,
only gain will be used resulting in ±EV
type control if small range of gain used
centered around 1x
AEC Maximum
Exposure
AEC Minimum
Aperture
AEX Maximum
Aperture
AEC Minimum
Gain
AEC Maximum
Gain
AEC Target aet YYY Target luma value for auto exposure
AEC Area aea Y Area to use for auto exposure
AEC Speed aes Y Adjusts the speed of auto exposure
AEC Enable aex Y Auto exposure mode selection 0 - off
Lens Aperture ape YY Set lens aperture - Parameter range varies from lens to
amx YYYY Maximum value for exposure used
by auto exposure control
aan YY Minimum value for lens aperture
used by auto exposure control
aax YY Maximum value for lens aperture
used by auto exposure control
adn YYYY Minimum value for digital gain used
by auto exposure control
adn YYYY Maximum value for digital gain used
by auto exposure control
control
control
changes
Same range as ex1
Range = (0, aax)
Same range as ape
Range = (0x0001, adx)
Same range as dgn
Range 0x001 to 0x3FF
Luma value is calculated using average
red, green and blue pixels over the
whole image or enabled zones (aea).
Luma is calculated according to
ITU.REC709:
Y = 0.2126R + 0.7152G + 0.0722B
0 - full image
1 - enabled zones
Range 0 (slowest) - 3 (fastest)
Default = 2
1 - auto exposure
2 - auto exposure and digital gain
3 - auto exposure and aperture
4 - auto exposure, aperture and digital
gain
lens
- 0 corresponds to a fully open aperture
Lens Focus
Step
Lens Focus to
Infinity
Lens Focus to
Zero
Lens Focus fsi Step lens focus towards infinity - Steps the lens focus towards infinity
fst YY Set focus step size - Parameter range 04h to C8h
- Effect of step size varies from lens to
lens
fci Set lens focus to infinity - Moves lens focus to infinity position
fcz Set lens focus to minimum - Moves the lens focus to its minumum
position
IO Industries Inc. www.ioindustries.com Revision 8.0
26 Flare CL User's Manual
Command Format Description Notes
Step Infinity using the current focus step size
Lens Focus
Step Zero
Lens Reset lnr Reset EF lens control
Lens Status lns Y Report lens status 0 - Lens ready (0 - no lens, 1 - lens
Lens Control
Bypass
Opto-1 Output
Select
Opto-2 Output
Select
fsz Step lens focus towards minimum - Steps the lens focus towards the
minimum position using the current
focus step size
ready)
1 - Focal length in mm
2 - F-number x 10 (eg. 41 = F4.1)
3 - Near focal distance stop in cm
4 - Far focal distance stop in cm
Focal distance stop of 65535 means
infinity
5 - Auto/Manual focus switch position
(0 - AF, 1 - MF)
Focus commands will not work if switch
is in MF position
lcb Y Directly communicate with lens
adapter
op1 Y Select output signal for Optocoupled
Output #1 (pin 10)
op2 Y Select output signal for Optocoupled
Output #2 (pin 9)
1 - enable bypass
0 - return lens control to camera
- Enabling lens control bypass
connects the serial interface directly to
the lens adapter at 19200 baud
0 - Disabled (low)
1 - INTE1
2 - INTE2
3 - FVAL
4 - LVAL
0 - Disabled (low)
1 - INTE1
2 - INTE2
3 - FVAL
4 - LVAL
Test Pattern
Section 3.10
Horizontal Line
Correction
pat Y Enable test pattern 0 - off (image from sensor)
1 - on with moving lines
2 - on without moving lines
hlc Y Horizontal line artifact correction 0 - off
1 - on
Section 3.11
HLC
Adjustment
hrg Y Horizontal line 'slot time' adjustment Bit 3 - Sign bit ('0' - add, '1' - subtract)
Bits 2:0 - Value (0-7)
Section 3.11
Black Sun
Correction
bsc Y Black sun artifact correction 0-off
1-on
IO Industries Inc. www.ioindustries.com Revision 8.0
27 Flare CL User's Manual
Command Format Description Notes
Section 3.11
Bad Pixel
Replacement
bpx Y Bad pixel replacement algorithm 0-off
1-on
Section 3.12
Column Fixed
Pattern Noise
Correction
Reduced Line
Rate
fpn Y Correct column fixed pattern noise 0-off
1-on
spd Y Reduce camera line rate in 8x8/10-
bit output formats
0-off
1-on (applies only when clf = 5 or 6)
Section 3.17
Baud Rate sbd Y Serial Port Baud Rate 0 - 9600 (power-up default)
1 - 115200
2 - 460800
Serial Port
Echo
Set Windows swd Applies current internal window
Set Power-up
Profile
ech Y Enable serial port echo 0 - off
1 - on
settings to output
pup Y Power-up user set page or factory
page
1-8 - User set page
9-f - Factory page (will return f)
Section 3.14
Temperature
tmp Returns sensor temperature
Section 3.13
Camera Model cam Returns camera model Read only.
Serial Number ser Returns camera serial number Read only.
Firmware
Version
Get Camera
Parameters
Help hlp Returns summary of all commands
Reset Camera
ver Returns FPGA firmware version Read only.
gcp Returns all current settings Returns all commands up to, and not
including, 'tmp'
rst Complete camera reboot Loads from power-up profile.
Section 3.15
Load Factory
Settings
fac Load from factory page
Section 3.14
IO Industries Inc. www.ioindustries.com Revision 8.0
28 Flare CL User's Manual
Command Format Description Notes
Save to User
Set
sav Y Save current settings to user set
Section 3.14
Load from User
Set
Open User Set
Name
Write User Set
Name
Save User Set
Name
Read User Set
Name
Error Register
Read
lod Y Load settings from user set page
onm Y Open user set name for editing
wnm Y Write ASCII character to open user
snm Save currently opened user set
rnm Y Read user set name
err Returns one-hot error register TBD
Table 9. Command Summary
page
Up to 32 characters per name
set
name
IO Industries Inc. www.ioindustries.com Revision 8.0

29 Flare CL User's Manual
3.2 Camera Link Output Format
The clf command is used to set the Camera Link output format. The available Camera Link
output formats are shown in Table 10. In all configurations the images are outputted from left
to right starting with the top line (assuming no image flip).
The output pixel clock is 80 MHz in all formats.
Camera Link
Configuration
Base
Medium
Full 5 8 x 8-bit
Plus10 6 8 x 10-bit
Plus 7 10 x 8-bit
Table 10. Camera Link Output Formats
Example:
Set CL configuration to 8x8-bit
Command: clf 5<CR>
Response: <ACK>
clf command
setting
0 2 x 8-bit
1 2 x 10-bit
2 3 x 8-bit
3 4 x 8-bit
4 4 x 10-bit
Format
IO Industries Inc. www.ioindustries.com Revision 8.0

30 Flare CL User's Manual
3.3 Image Windowing
The Flare CL camera supports up to 8 separate non-overlapping windows. Image windowing
can be used to increase the frame rate of the camera and reduce the amount of data received
by the frame grabber or recording system.
The window parameters are stored in internal registers and are only applied to the sensor and
readout path when the set windows command, swd, is sent.
While sending window parameters the current values of the window commands (nwd, hrx,
hs1-hs8, vr1-vr8 and vs1-vs8) will not reflect the changes until the windows have been
successfully set. For example if a gcp command is sent mid way through setting up the
windows, all the old parameters will be returned. In this fashion no invalid parameters will be
saved to user set space if a save command is sent in the middle of the process.
Follow the steps below to change the windowing of the camera:
1. Set the number of windows, nwd command
• Range 1 to 8.
• This command will reset all the internal window registers to zero.
• Always start the process with this command, and use to clear the settings to start
over if needed.
• After setting the number of windows all commands related to those windows must
be set at least once (since internal registers are set to zero). For example if the
number of windows is set to 2 the following commands must be sent at least once:
hrx, hs1, vr1, vs1, hs2, vr2 and vs2.
2. Set the horizontal resolution, hrx command
• The horizontal resolution of all windows is the same.
• The resolution must be a multiple defined by the currently set Camera Link format:
◦ 2x8/10-bit, 4x8/10-bit, 8x8/10-bit - Must be multiple of 8 (max 2048).
◦ 3x8-bit - Must be a multiple of 12 (max 2052, 4 black columns on right side).
◦ 10x8-bit - Must be a multiple of 10 (max 2050, 2 black columns on right side).
• The minimum number of pixels is 2 times the multiple value (16, 24 or 20).
3. Set the horizontal start pixel of the first window, hs1 command
• The number for the pixels are from 1 to the maximum value.
• The start pixel must follow the same rule as the horizontal resolution, then add 1.
• For example valid starting pixels in 10x8-bit Camera Link format are 1, 11, 21,
IO Industries Inc. www.ioindustries.com Revision 8.0

31 Flare CL User's Manual
31, ..., 2031, 2031.
4. Set the vertical resolution of the first window, vr1 command
• The minimum number of lines for any window is 4.
• For color cameras the number of lines must be a multiple of 4.
• For monochrome cameras the number of lines must be even.
5. Set the start line of the first window, vs1 command
• For color cameras the start line must be odd to preserve the bayer pattern.
6. Repeat steps 3-6 for all active windows
• Start pixel, hs2-hs8 commands.
• Vertical resolution, vr2-vr8 commands.
• Start line, vs2-vs8 commands.
7. Set the windows, swd command
• No parameter, send swd<CR>
• All window settings are checked at this time. If an invalid setting or overlapping
windows are found the set window command will return a <NAK>.
• Once the windows have been set adjustments can be made to any of the window
parameters followed by another set window command. If a set number of windows
command (nwd) is sent all commands for those windows must be sent.
An example of 8 sub-windows (4M180 in 8x8-bit CL format) is shown in Figure 12. The
commands sent to the camera to generate these 8 sub-windows is shown below:
➢ nwd 8
➢ hrx 100
➢ hs1 001, vr1 100, vs1 001
➢ hs2 101, vr2 100, vs2 101
➢ hs3 201, vr3 100, vs3 201
➢ hs4 301, vr4 100, vs4 301
➢ hs5 401, vr5 100, vs5 401
➢ hs6 501, vr6 100, vs6 501
➢ hs7 601, vr7 100, vs7 601
➢ hs8 701, vr8 100, vs8 701
➢ swd
IO Industries Inc. www.ioindustries.com Revision 8.0

32 Flare CL User's Manual
Full Image Size (4M180 - 2048x2048)
8 Sub-Windows
256x256 per window
256x2048 overall
Figure 12. Example of image windowing with 8 sub-windows
Once a set of windows has been established changes can be made to those windows by
sending only the commands related to that window, followed by a set window command. For
example to change the start pixel of window 7 to the first pixel in the previous example only
the commands hs7 001 and swd commands need to be sent. Note that if the number of
windows command (nwd) is sent then all commands related to the windows must be re-sent.
IO Industries Inc. www.ioindustries.com Revision 8.0

33 Flare CL User's Manual
3.4 Image Sub-Sample
The sub command is used to enable image sub-sampling. Set to 1 to enable sub-sampling.
Every second pixel and every second line are skipped for a monochrome camera when subsampling is enabled. With a Bayer color camera the skipping is performed in pairs to
preserve the Bayer pattern. See Figure 13.
The frame rate increases when image sub-sampling is used and the field of view of the
camera remains the same. The frame rate increase depends on the image horizontal
resolution and the camera link output format. The minimum increase in frame rate is
approximately 2 times, and can be up to almost 4 times. See section 3.6 for more details.
Figure 13. Image sub-sampling example
The number of clock cycles for a given Camera Link format is used in the internal data path of
the camera instead of the raw horizontal resolution value. For the full resolution in 10x8-bit
output format there are 205 clock cycles per active line output (2050 pixels). The camera
divides this value by 2, ignoring the remainder, to calculate the resolution when sub-sampling
is enabled. In the 10x8-bit output format case this results in 102 clock cycles, giving an
overall horizontal resolution of 1020 on the output. The sub-sampled horizontal resolution of
the full image size in 3x8-bit output format is also 1020.
IO Industries Inc. www.ioindustries.com Revision 8.0

34 Flare CL User's Manual
3.5 Exposure Mode
The exposure mode of the camera is controlled using the mde command and there are four
options:
➢ Free-run programmable exposure (mde = 0)
➢ Edge-triggered programmable exposure (mde = 1)
➢ Edge-triggered level-controlled exposure (mde = 2)
➢ Edge-triggered double exposure (mde = 3)
3.5.1 Free-run programmable exposure
In free-run exposure mode an internal timer is used to control the exposure time of a frame.
The primary exposure time is set in microseconds using the ex1 command. The range of the
allowable exposure time will change when the frame period changes (per command, also in
microseconds). The timing for this mode, with High Dynamic Range exposure modes
disabled, is shown in Figure 14.
Exposure Time, Frame N FOT
Figure 14. Free-run exposure timing
In Figure 14 the example timing is shown with the exposure time less than the readout time.
The fully pipelined architecture of the sensor allows for the next integration period to start
while the previous frame is being read out. There is a Frame Overhead Time (FOT) period
after exposure ends and before the readout of the frame begins. The next exposure cannot
start in the FOT period. The FOT varies with the Camera Link output formats and the image
horizontal resolution, see section 3.6.
Exposure Time, Frame N+1 FOT Exposure Time, Frame N+2
Readout Time, Frame N
Frame Period
Readout Time, Frame N+1
IO Industries Inc. www.ioindustries.com Revision 8.0

35 Flare CL User's Manual
3.5.2 Edge-triggered programmable exposure
In edge-triggered programmable exposure mode an internal timer is used to control the
exposure of a frame, however, exposure does not start until the active edge of the input
trigger is seen. The primary exposure time is set using the ex1 command, and the time is set
in microseconds. The frame period command has no effect in this mode. The range of the
exposure time will be set according to the maximum frame period allowed for the current
Camera Link output format set. The timing for this mode, with High Dynamic Range exposure
modes disabled, is shown in Figure 15.
Input Trigger
(rising edge)
Exposure Time, Frame N FOT
Readout Time, Frame N-1
Frame Period
Exposure Time, Frame N+1
Readout Time, Frame N
FOT
Figure 15. Edge-triggered programmable exposure timing
Exposure starts when the active edge of the input trigger is seen. The active edge can be set
to rising or falling (te1 command). There is a Frame Overhead Time (FOT) period after the
exposure ends, same as free-run mode, and then readout of the frame begins.
The minimum pulse width of the input trigger is 200 ns. The delay from the active edge
of the trigger to the start of exposure is approximately 200 ns.
Exposure of the next frame cannot start until the readout of the current frame begins. Also
exposure cannot end during the readout of the previous frame. The camera will not look for a
new trigger pulse until N microseconds have elapsed after readout begins, where N =
Readout Time - Exposure Time, if the exposure time is less than the readout time.
IO Industries Inc. www.ioindustries.com Revision 8.0

36 Flare CL User's Manual
3.5.3 Edge-triggered level-controlled exposure
In edge-triggered level-controlled exposure mode the exposure of the frame is controlled by
the active state of the input trigger. The frame period and exposure commands have no effect
in this mode. The High Dynamic Range exposure modes are not available in this mode. The
timing for this mode is shown in Figure 16.
Frame Period
Input Trigger
(active high)
Exposure Time, Frame N Exposure Time, Frame N+1
FOT
FOT
Readout Time, Frame N-1
Figure 16. Edge-triggered level-controlled exposure timing
EOT EOT
Readout Time, Frame N
In this mode exposure starts when the input trigger transitions into the active state. Exposure
continues until the trigger transitions into the non-active state. The active state can be set to
low or high (te1 command).
There is a Frame Overhead Time (FOT) period after the sensor is triggered to stop integration
before the readout starts. When the sensor enters this FOT period there is a portion of time
where the photodiodes are still being exposed to light before the charge is transferred to the
storage elements. This Exposure Overhead Time (EOT), shown in Figure 16, is a known
constant value and only depends on the Camera Link output format. For programmable
exposure modes this time is included in the exposure time value. See section 3.6 for more
information.
The minimum pulse width is 1 µs.
Exposure of the next frame cannot start until the readout of the current frame begins. Also
exposure of the next frame cannot end during the readout of the current frame. To ensure
this condition is met the camera does not look for the end of exposure transition until the
readout of the current frame has completed.
IO Industries Inc. www.ioindustries.com Revision 8.0

37 Flare CL User's Manual
3.5.4 Edge-triggered double exposure
In edge-triggered double exposure mode two frames are captured in rapid succession when a
single trigger edge is seen. This type of exposure mode is typically used in Particle Image
Velocimetry (PIV) and Particle Tracking Velocimetry (PTV) applications.
The first frame's exposure starts when the active trigger edge is detected and the exposure
time is set by the ex1 command. The first frame corresponds to the 'short' exposure frame.
After the Frame Overhead Time period of the first frame, exposure of the second frame
automatically starts and the duration is equal to the frame readout time. The second frame
corresponds to the 'long' exposure frame. Starting the second frame exposure automatically
ensures the smallest time between the frame exposures. The timing of this mode is shown in
Figure 17.
Trigger
(rising)
Programmed
Exposure Time,
Frame N
FOT
EOT
Automatic Exposure Time,
Frame N+1
Readout Time, Frame N
FOT
EOT
Programmed
Exposure Time,
Frame N
Readout Time, Frame N+1
FOT
EOT
Inter-frame Time
Figure 17. Edge-triggered double exposure timing
The inter-frame time between exposures is equal to the Frame Overhead Time (FOT) minus
the Exposure Overhead Time (EOT). See table 11 for the minimum inter-frame times for the
2M360 and table 12 for the 4M180. The minimum inter-frame time for the fastest 2M360
configuration is 21 µs. The minimum inter-frame time for the fastest 4M180 configuration is
36 µs.
IO Industries Inc. www.ioindustries.com Revision 8.0

38 Flare CL User's Manual
3.6 Frame Period and Exposure
The frame period in free-run exposure mode is controlled with the per command. The frame
period is specified in microseconds. The minimum frame period of the camera (maximum
frame rate) is determined by the Camera Link output format and the resolution. Assuming
free-run operation and that the exposure time is less than the readout time the frame period is
calculated as follows:
➢ Frame Period = Frame Overhead Time + Readout Time
The Frame Overhead Time (FOT) depends on the Camera Link output format and the
horizontal resolution. Table 11 shows the FOT period for the 2M360 given the configuration of
the camera. Table 12 shows the FOT period for the 4M180.
The Exposure Overhead Time (EOT) which is included in the programmable exposure times,
and which must be considered in the level-controlled exposure (see section 3.5.3), is also
shown in Table 11 and Table 12.
The readout time of a frame is equal to the number of lines in the output image multiplied by
the line time. Line times are also shown in Table 11 and Table 12.
The spd command can be used to reduce the line rate of the Flare cameras in 8x8/10-bit
Camera Link output formats. This may be necessary when using PCIe x4 frame grabbers, or
when using a pair of cameras with a PCIe x8 frame grabber. See section 3.17 for the line
times and sample frame rates with the reduced line rate.
IO Industries Inc. www.ioindustries.com Revision 8.0

39 Flare CL User's Manual
Camera Link Output
Format
2x8/10-
bit
Base
3x8-bit
Medium
4x8/10-
bit
Horizontal
Resolution
2048 ≥ HR > 1024 59
1024 ≥ HR > 512 46 6.45 32
FOT
(in µs)
EOT
(in µs)
14
Line Time
(in µs)
12.90 45
512 ≥ HR 39 3.23 25
2052 ≥ HR > 1704 61 19 8.6 42
1704 ≥ HR > 1536 51 16 7.16 35
1536 ≥ HR > 1272 46 14 6.45 32
1272 ≥ HR > 1020 38 12 5.38 26
1
1020 ≥ HR > 852 52 19 4.3 33
852 ≥ HR > 768 43 16 3.58 27
768 ≥ HR > 636 39 14 3.23 25
636 ≥ HR 33 12 2.69 21
2048 ≥ HR > 1024 46
6.45 32
14
1024 ≥ HR 39 3.23 25
Minimum
Inter-Frame
Time (in µs)
Full 8x8-bit Any 39 14 3.23 25
Plus10 8x10-bit Any 39 14 3.23 25
Plus 10x8-bit Any 33 12 2.69 21
Table 11. 2M360 FOT, EOT and line time periods
1
Only firmware versions 7 or higher have 8 horizontal timing zones. Previous firmware versions had
only 2 timing zones: 2052 ≥ HR > 1020 with equivalent timing to 2052 ≥ HR > 1704 region above, and
1020 ≥ HR with equivalent timing to 1020 ≥ HR > 852 region above.
IO Industries Inc. www.ioindustries.com Revision 8.0

40 Flare CL User's Manual
Camera Link Output
Format
2x8/10-
bit
Base
3x8-bit
Medium
4x8/10-
bit
Horizontal
Resolution
2048 ≥ HR > 1024 91
1024 ≥ HR > 512 78 6.45 50
FOT
(in µs)
EOT
(in µs)
28
Line Time
(in µs)
12.90 63
512 ≥ HR 71 3.23 43
2052 ≥ HR > 1704 104 37 8.6 67
1704 ≥ HR > 1536 86 31 7.16 55
1536 ≥ HR > 1272 78 28 6.45 50
1272 ≥ HR > 1020 65 24 5.38 41
1
1020 ≥ HR > 852 95 37 4.3 58
852 ≥ HR > 768 79 31 3.58 48
768 ≥ HR > 636 71 28 3.23 43
636 ≥ HR 60 24 2.69 36
2048 ≥ HR > 1024 78
6.45 50
28
1024 ≥ HR 71 3.23 43
Minimum
Inter-Frame
Time (in µs)
Full 8x8-bit Any 71 28 3.23 43
Plus10 8x10-bit Any 71 28 3.23 43
Plus 10x8-bit Any 60 24 2.69 36
Table 12. 4M180 FOT, EOT and line time periods
1
Only firmware versions 7 or higher have 8 horizontal timing zones. Previous firmware versions had only
2 timing zones: 2052 ≥ HR > 1020 with equivalent timing to 2052 ≥ HR > 1704 region above, and 1020 ≥
HR with equivalent timing to 1020 ≥ HR > 852 region above.
IO Industries Inc. www.ioindustries.com Revision 8.0

41 Flare CL User's Manual
Observations from Table 11 and Table 12:
➢ Camera Link Plus output format has the fastest 8-bit frame rate.
➢ Camera Link Plus10 has the fastest 10-bit frame rate.
➢ When the horizontal resolution is reduced only CL Base or Medium configurations may
increase in frame rate.
➢ The frame rate will increase for every line skipped in the output image in all
configurations.
➢ When sub-sampling is enabled the frame rate will nearly double because of the vertical
reduction in image size (not exactly double because of the FOT period). Only in CL
Base or Medium will a frame rate increase possibly be observed because of the
horizontal reduction in image size when sub-sampling is enabled.
➢ The FOT value for the 4M180 is larger than the 2M360, however the line times are the
same. Given the same resolution the 4M180 frame period is only slightly larger than
the 2M360 (at most 32 µs difference in frame period).
The camera re-calculates the allowable range for the frame period when the CL output format
or resolution is changed. The camera will also adjust the current frame period to the new
minimum value. The range for the exposure times is also re-calculated, and if any current
setting is outside of the range it will be adjusted to the maximum time.
Frame rate calculation example:
➢ 2M360 in 4x10-bit CL Medium with a single window set to 768 x 512 (no sub-sample)
• Frame Period = FOT + Readout Time
• = 39 µs + 512 (3.23 µs)
• = 1693 µs
• Frame Rate = 1 / Frame Period = 591 Hz
Table 13, Table 14, and Table 15 show some sample frame rates.
IO Industries Inc. www.ioindustries.com Revision 8.0

42 Flare CL User's Manual
Maximum Frame Rate
(Hz)
Camera
Link
2 x 8/10-bit
4 x 8/10-bit
2048
x
2048*
38 50 72 75 266 318 1228
75 100 143 150 527 629 1228
2048
x
1536*
1920
x
1080
Resolution
1280
x
1024
960
x
576
Format
8 x 8/10-bit
150 199 284 299 527 629 1228
(spd = 0)
Table 13. Sample frame rate (*4M180 only, all other frame rates based on 2M360)
Maximum Frame Rate
(Hz)
2052
x
2048*
2052
x
1536*
1920
x
1080
Resolution
1272
x
1024
960
x
576
Camera
Link
3 x 8-bit
1
56 75 107 180 395 755 1474
Format
640
x
480
636
x
480
320
x
240
324
x
240
Table 14. CL Base 3x8-bit sample frame rates (*4M180 only, all other frame rates based on 2M360)
1
Based on firmware version 7 or higher timing zones.
Maximum Frame Rate
(Hz)
2050
x
2048*
2050
x
1536*
1920
x
1080
Resolution
1280
x
1024
960
x
576
640
x
480
320
x
240
Camera
Link
10 x 8-bit
180 239 340 359 632 755 1474
Format
Table 15. CL Plus 10x8-bit sample frame rates (*4M180 only, all other frame rates based on 2M360)
IO Industries Inc. www.ioindustries.com Revision 8.0

43 Flare CL User's Manual
In programmable exposure modes (mde = 0 or 1) the minimum exposure time is set to the
Exposure Overhead Time (EOT) plus 1 µs. In level-controlled exposure mode (mde = 2) the
minimum trigger pulse is 1 µs resulting in the same minimum exposure times as the
programmable modes. Table 16 shows the minimum exposure times. Note that the 2M360
does have lower minimum exposure times.
Camera Link Output
Format
Exposure Time
Base
Medium 4 x 8/10-bit 15 29
Full 8 x 8-bit
Plus10 8 x 10-bit
Plus 10 x 8-bit 13 25
Table 16. Minimum exposure times
1
Based on firmware version 7 or higher timing zones.
2 x 8/10-bit 15 29
3 x 8-bit
(spd = 0)
(spd = 0)
1
2M360
Minimum
(in µs)
13 25
15 29
15 29
4M180
Minimum
Exposure Time
(in µs)
IO Industries Inc. www.ioindustries.com Revision 8.0

44 Flare CL User's Manual
3.7 High Dynamic Range Modes
The hdr command is used to enable a High Dynamic Range (HDR) exposure mode. The
following modes are available:
➢ Interleaved (hdr = 1)
➢ Piecewise (hdr = 2)
Set the hdr command to zero for normal exposure.
3.7.1 Interleaved HDR Exposure Mode
The Interleaved HDR mode is useful when there are both under and over exposed areas
within a frame. The Interleaved HDR mode will increase the dynamic ranges within these
dark and bright spots revealing detail that would not be seen otherwise.
In Interleaved HDR mode the even and odd lines have different exposure times. The odd
lines (1, 3, 5, ..) are exposed for the programmed time set by the ex1 command. The even
lines (2, 4, 6, ...) are exposed for the programmed time set by the ex2 command. For a color
camera the exposure times apply to pairs of lines to preserve the Bayer pattern.
One exposure time should be set high to see the detail in the dark areas of the image. The
second exposure time should be set low to see the detail in the bright areas of the image. An
'image fuse' filter is required on the host side to combine these two 'fields' into dramatic HDR
images.
Note an image fuse conversion filter comes standard with IO Industries Inc. CoreView©
and Streams© software packages.
For the best results the two fields should be separated and individually scaled up to the full
image size. For a color camera the Bayer demosaicing conversion should be done first. Next
the images can be 'fused' together by averaging the pixels from the two frames. Exposure
times can be used for the multiplication factor for each frame for a more accurate image fuse
(instead of 0.5 when simply averaging).
IO Industries Inc. www.ioindustries.com Revision 8.0

45 Flare CL User's Manual
3.7.2 Piecewise HDR Exposure Mode
The Flare CL camera can achieve a high optical dynamic range using the piecewise exposure
mode. This HDR mode is useful when there are over exposed areas within a frame. The
piecewise exposure mode will prevent pixels that are being exposed to large amounts of light
from over saturating while not influencing the response of the darker pixels.
Pixels which reach a programmed voltage will be clipped, while dark pixels will be left
untouched. The clipped pixels are held at this voltage for a programmed period of time. The
programmed voltage and exposure time correspond to a 'kneepoint' which creates another
piece, or slope, in the response curve. Up to two kneepoints can be programmed resulting in
3 slopes in the response curve. An example of piecewise exposure with 2 kneepoints and 3
slopes is shown in Figure 18.
Pixel
Reset
Total Exposure
Time
Pixel
Sample
Vhigh
Vkp1
Vkp2
Vlow
Kneepoint 1
Exposure
Kneepoint 2
Exposure
Figure 18. Example pixel response in Piecewise HDR exposure mode
IO Industries Inc. www.ioindustries.com Revision 8.0

46 Flare CL User's Manual
In Figure 18 the green line represents a darker pixel that is not influenced by the kneepoint
settings and will have a normal response. The red line represents a bright pixel which would
be saturated in normal exposure. In piecewise exposure mode the bright pixel reaches the
first kneepoint voltage (Vkp1 in figure) and is held there until the first kneepoint exposure time
starts. The bright pixel continues exposure until it reaches the second kneepoint voltage
(Vkp2 in figure) where it is held again. Finally the pixel continues exposure when the start of
the second kneepoint exposure time is reached.
Table 17 summarizes the commands used in piecewise HDR exposure mode.
Command Range Description
hdr 0 - 2 0 - Normal exposure
1 - Interleaved HDR mode
2 - Piecewise HDR mode
ex1 - Total exposure time in microseconds
pns 2 - 3 Number of slopes.
2 - Kneepoint 1 enabled
3 - Kneepoints 1 and 2 enabled
pv2 40h - 7Eh Voltage setting for kneepoint 1.
Kneepoint 1 used in both slope cases.
Must be less than setting for kneepoint 2 when using
three slopes.
ex2 - Kneepoint 1 exposure time in microseconds.
Pixels are held at the pv2 voltage until (ex1 - ex2)
time has elapsed.
pv1 41h - 7Fh Voltage setting for kneepoint 2.
Must be greater than kneepoint 1.
ex3 - Kneepoint 2 exposure time in microseconds.
Pixels are held at the pv1 voltage until (ex1 - ex3)
time has elapsed.
Must be less than kneepoint 1 exposure time.
Table 17. Summary of commands used in Piecewise HDR exposure mode
IO Industries Inc. www.ioindustries.com Revision 8.0

47 Flare CL User's Manual
3.8 Offset and Gain
3.8.1 Digital Offset
The dark level offset can be programmed using the off command. The dark level at the
output of sensor equals (70 + setting - 16383), Valid off setting range is 0 to 16383 (3FFFh).
The offset is a digital value added to the output signal after the analog to digital conversion.
3.8.2 Analog Gain
An analog gain can can be applied using the agn command. Valid range is 0 to 3, and the
corresponding gain values are shown in Table 18. The analog gain is applied by a
Programmable Gain Amplifier (PGA) in every column before the analog to digital conversion.
agn setting Gain
0 x 1 (0 dB)
1 x 1.2 (+1.6 dB)
2 x 1.4 (+2.9 dB)
3 x 1.6 (+4.1 dB)
Table 18. Analog gain settings
3.8.3 ADC Ramp
The sensors in the Flare CL camera series use column ramp Analog to Digital Converters
(ADC). A ramp generator provides the ramp for the ADC reset and pixel measurements
(Correlated Double Sampling). The adc command can be used to change the slope of this
ramp, producing a 'digital gain'. The adc ramp setting of each camera is calibrated at the
factory to match a desired bit/e value and provide quality, high dynamic range images.
The adc command is savable to the user sets (firmware version 02 or higher). To load the
factory calibrated value send the command adc 00. With the parameter set to 00 the factory
value will be loaded.
IO Industries Inc. www.ioindustries.com Revision 8.0

48 Flare CL User's Manual
0
1
2
3
4
5
6
7
8
24
26
28
30
32
34
36
38
40
42
44
46
48
50
52
54
56
58
adc setting
gain
CLF 7
CLF 0, 1, 3, 4, 5, 6
CLF 2
CLF 5,6 (spd = 1)
Typical gain values for the adc settings are shown in Figure 19. The ADC gain response
depends on the sensor clock frequency. Figure 19 shows four curves one for Camera Link
output format 3x8-bit (clf = 2, 30 MHz), one for output format 10x8-bit (clf = 7, 48 MHz), one
for output formats 8x8/10-bit with spd = 1 (clf = 5 or 6, 36 MHz) and the other formats (40
MHz). Generally, an ADC ramp value of 1.6 provides good digital numbers per electron
covering the 10-bit range.
Figure 19. Typical ADC gain values versus ramp settings
3.8.4 Digital Gain
A digital gain can be applied using the dgn command. A value between 16 and 256 is
programmed using the dgn command. The digital gain applied to the pixels is as follows:
➢ Digital Gain = (dgn setting) / 16
The range of the digital gain is 1x (0 dB) up to 16x (+24 dB). The default setting is 16 giving
IO Industries Inc. www.ioindustries.com Revision 8.0

49 Flare CL User's Manual
unity gain. The digital gain is applied to 10-bit pixels read out from the sensor.
3.9 Image Flipping
The output image from the Flare CL camera can be flipped in the X and/or Y direction using
the flp command. Table 19 shows the image flipping options.
flp setting Description
0 No image flipping
1 Image flipped in X direction
2 Image flipped in Y direction
3 Image flipped in both X and Y directions
Table 19. Image flipping settings
Figure 20 shows an example of image flipping.
NO FLIP
Figure 20. Image flipping example
Image flip in the X direction can be useful in an inspection application where two cameras are
placed on either side of the material flow. One camera can be set to image flip in the X
direction resulting in both cameras seeing the flow of material in the same direction. This may
simplify processing software algorithms and aid in an operators view of the material.
X DIRECTION
Y DIRECTION X+Y DIRECTION
Image flip in the X and Y direction is useful when the camera has to be installed upside down.
IO Industries Inc. www.ioindustries.com Revision 8.0

50 Flare CL User's Manual
3.10 White Balance
Flare CL color cameras have red and blue multipliers to white balance the output images.
The multipliers are unsigned 2.10 fixed point numbers with a range of 0x001 (0.00097) to
0xFFF (3.99902). The white balance command is wbm <BBB><RRR>.
The white balance of the raw Bayer pixels produces equal results to an algorithm performed
after a Bayer demosaicing algorithm. Taking advantage of the Flare white balance features
lightens the software load of the host computer or frame grabber. Automatic one shot white
balance along with continuous tracking white balance features are available.
3.10.1 Auto White Balance (AWB)
A one shot auto white balance can be performed using the awb command. Only a single
frame is used for the calculation and either the full image (awb 0) or enabled zones (awb 1)
can be selected. See section 3.10 for more information on the image zones.
The multiplier command (wbm) is updated when the command completes. The auto white
balance feature cannot be use when tracking white balance is enable, command will return
NAK.
3.10.2 Tracking White Balance (TWB)
Tracking white balance (TWB) is used to constantly monitor and adjust the camera's white
balance. Set the twb command to 1 (full image) or 2 (active zones) to enable tracking white
balance.
The white balance multipliers (wbm) parameter values are automatically updated every
frame, and can be queried while the feature is running.
The TWB speed command (tws) is used to control the magnitude of the multiplier changes,
reaction time and convergence time. The speed command range is from 0 (slowest) to 3
(fastest). The default speed setting is 2.
IO Industries Inc. www.ioindustries.com Revision 8.0

51 Flare CL User's Manual
3.11 Auto Exposure Control (AEC)
The Flare CL cameras have advanced auto exposure and gain control. The AEC block can
be used to automatically adjust the camera's response in dynamic lighting environments by
changing the exposure time and/or digital gain settings based on the calculated average
image luminance compared to a user programmable target. The luminance value is
calculated according the ITU-R BT.709-5 recommendation.
Table 20 shows the commands used to control the AEC block.
Command Description
amn YYYY Minimum exposure time. Range = (min ex1, amx).
amx YYYY Maximum exposure time. Range = (amn, max ex1).
aan YY Minimum aperture value. Range = (min ape, aax).
aax YY Minimum gain value. Range = (0, max ape).
adn YYYY Minimum gain value. Range = (min dgn, adx).
adx YYYY Maximum gain value. Range = (0, max dgn).
aet YYY Target luma value.
Calculated according to:
Y = 0.2126R + 0.7152G + 0.0722B
aea Y Area used for calculations.
0 – full image
1 – enabled zones
aes Y Algorithm speed. Adjusts AEC reaction time and settling
times.
Range 0 (slowest) to 3 (fastest).
Default = 2.
aex Y Enable/Disable AEC.
0 – disabled
1 – enabled, auto exposure
2 – enable, auto exposure + digital gain
3 – enabled, auto exposure + lens aperture
4 – enabled, auto exposure + lens aperture + digital gain
Table 20: Auto exposure and gain control commands
AEC can be enabled in either free-run or triggered exposure modes, but cannot be use when
a High Dynamic Range exposure mode is enabled. A command sent to enable AEC will
receive a NAK if the hdr command is not zero, and vice-versa.
IO Industries Inc. www.ioindustries.com Revision 8.0

52 Flare CL User's Manual
AEC parameter values can be changed while running, for example the target luma value can
be modified while the algorithm is enabled.
3.12 AWB and AEC Zones
Auto and tracking white balance, and auto exposure control can be set to use the pixel
information in the entire image or only active zones can be used. The windowed image is
divided into 64 zones, 8x8. The size of the zones is automatically adjusted when the image
window size is changed. The horizontal zone width is counted in clock cycles, with 8 pixels
per clock, and if the overall image width is not mod64 the zones will be centered in the
window with an unused portion to the left and right of the zones. Similarly if the image height
is not mod8 the zones will be centered vertically.
To view the position of the zones in the image use the azo command to enable an overlay.
Active zones will be clear, while inactive zones will be a grey shade (alpha blend with pixel
data). Unused image areas will have a dark grey alpha blend. The overlay will only be
shown when tracking white balance or auto exposure is enabled.
The active zones are set using the four commands: az1, az2, az3 and az4. Each command
represents 16 zones, one zone per bit, with az1 starting in the top left corner of the image.
Set a zone's corresponding command bit to '1' to enable the zone, or '0' to ignore the zone.
Figure 21 shows some example zone settings.
IO Industries Inc. www.ioindustries.com Revision 8.0

53 Flare CL User's Manual
Center Diamond
az1 0000 az1 1800
az2 3c3c az2 7e3c
az3 3c3c az3 3c7e
az4 0000 az4 0018
Plus Sign Vertical
az1 1818 az1 1818
az2 ff18 az2 1818
az3 18ff az3 1818
az4 1818 az4 1818
Figure 21: Example zone
settings
Horizontal
az1 0000
az2 ff00
az3 00ff
az4 0000
IO Industries Inc. www.ioindustries.com Revision 8.0

54 Flare CL User's Manual
3.13 Look Up Table
The Flare CL cameras have a custom Look Up Table (LUT) in the data path. Up to 4 custom
user LUT tables can be stored in non-volatile memory in the camera. Use the lut command
to load one of the four LUTs from memory, parameter value 1 – 4. Send lut 0 to disable the
LUT block.
The Flare cameras store a unique 32 byte name for each LUT. To read a user name send the
rnm command, with parameter between 0x9-0xC. See section 3.16 for more details.
The LUT tables in the camera are 12-bit. For the best image quality the data path with the
Flare CL cameras carries extra decimal bits per pixel after the fixed pattern noise correction
blocks. At the input the LUT block the pixel depth is reduced to fixed point 8.4 and 10.2 bits
for 8-bit and 10-bit ADC modes, respectively. Note only 10x8-bit and 20x8-bit output formats
use 8-bit ADC mode on the sensor, all other modes run the sensor in 10-bit ADC mode. With
current software 10-bit LUT tables are interpolated for 12-bit values to store in the camera.
3.14 Lens Control
The Flare CL cameras include support for an optional lens mount compatible with Canon EF
lenses.
The aperture setting command (ape) controls the iris in the lens to vary the amount of light it
allows into the camera. An aperture value of zero corresponds to a fully open aperture. The
maximum number of aperture steps varies from lens to lens.
Several commands control the focus position of the lens. The fcz and fci commands move
the focus directly to its minimum point and to infinity, respectively. The focus can be stepped
towards the minimum (fsz) and towards infinity (fsi). The focus step size can be set with the
fst command.
Information about the configuration of the lens can be retrieved by using the lns command
with the options show in Table 21.
IO Industries Inc. www.ioindustries.com Revision 8.0

55 Flare CL User's Manual
lns parameter Return value
0 Lens ready (0 - no lens, 1 - lens ready)
1 Focal length in mm
2 F-number x 10 (eg. 41 = F4.1)
3 Near focal distance stop in cm
4 Far focal distance stop in cm (stop of 65535
means infinity)
5 Auto/Manual focus switch position (0 - AF, 1 - MF)
Focus commands will not work if switch is in MF
position.
Table 21: Lens status
3.15 Test Pattern
The Flare CL cameras have a test pattern mode to aid in testing connectivity between the
camera and a frame grabber. The options for the pat command are shown in Table 22.
pat setting Description
0 Image from sensor
1 Test pattern enabled with moving lines (dynamic)
2 Test pattern enabled no moving lines (static)
Table 22. Test pattern Settings
In test pattern mode the camera frame rate is the same as in normal operation. All exposure
modes can be used when the test pattern is enabled. The test pattern image is always a
continuous image with a horizontal resolution set by the hrx command, and a vertical
resolution set by the total of the vr1 to vr8 commands for active windows. The sensor is not
disabled when the test pattern is on. Effects of some commands, such as gain or high
dynamic range modes, may not be visible in the test pattern image, however, when the test
pattern is disabled the images from the sensor will still be affected.
The total number of output clock cycles per line is shown in Table 23. The number of
horizontal blanking clock cycles is equal to the total number of clocks per line minus the
horizontal resolution in output clock cycles (HR / pixels per clock). This timing is only valid for
FPGA firmware versions 7 or higher. For previous versions the horizontal blanking period
was fixed at 2 clock cycles.
IO Industries Inc. www.ioindustries.com Revision 8.0

56 Flare CL User's Manual
Camera Link Output
Format
2x8/10-bit
Base
3x8-bit
Medium 4x8/10-bit
Horizontal Resolution Output clock cycles per line
(80 MHz)
2048 ≥ HR > 1024 1032
1024 ≥ HR > 512 516
512 ≥ HR 258
2052 ≥ HR > 1704 688
1704 ≥ HR > 1536 572
1536 ≥ HR > 1272 516
1272 ≥ HR > 1020 430
1020 ≥ HR > 852 344
852 ≥ HR > 768 286
768 ≥ HR > 636 258
636 ≥ HR 215
2048 ≥ HR > 1024 516
1024 ≥ HR 258
Full 8x8-bit sub = 0 258
sub = 1 129
Plus10 8x10-bit sub = 0 258
sub = 1 129
Plus 10x8-bit sub = 0 215
sub = 1 107
Table 23. Output clock cycles per line
The monochrome test pattern is a count up pattern. The counter starts at zero and counts up
to FFh (8-bit output configuration) or 3FFh (10-bit output configuration), and then starts over
at zero again. Pixel values are repeated for the number of pixels outputted given the Camera
Link configuration. For example in a 4x8/10-bit configuration each pixel value will be repeated
4 times, and in an 8x8/10-bit configuration each pixel value will be repeated 8 times.
There is a moving horizontal and vertical line in the image. Every image the horizontal line
moves one line down compared to the previous image. The vertical line moves to the right by
N pixels every image, where N is the number of pixels outputted per clock cycle (all values
are repeated in this manner, see paragraph above). Both lines are always present in the
image. When the previous frame has the horizontal line in the last line of the image, the next
frame will have the horizontal line in the first line. The moving lines help in testing the
IO Industries Inc. www.ioindustries.com Revision 8.0

57 Flare CL User's Manual
robustness of a system to bit errors by creating high frequency change in the pixel values at
the receiver.
A typical monochrome test pattern, with moving lines, is shown in Figure 22.
Figure 22. Monochrome test pattern (with moving lines)
The bayer test pattern for color Flare models is very similar to the monochrome test pattern.
The bayer pattern is a count up pattern (0-FFh in 8-bit mode and 0-3FFh in 10-bit mode), but
the count up values are only assigned to one color plane at a time, while the other colors are
set to zero. The result is color bands with increasing brightness, starting with green, followed
by blue and finally red. The width of the color bands depends on the Camera Link
configuration. The color bands are 256 pixels wide, except in 3x8-bit Camera Link Base
mode where they are 288 pixels wide. Like the monochrome test pattern the count up value
increases by 1 every Camera Link output clock cycle. For example in 3x8-bit mode the count
up value will count from 0 to 255 and then reset to 0 on the 257th clock cycle. In the final
image this reset to zero starts at column 3x256 = 768, appearing as a break in the color bar.
IO Industries Inc. www.ioindustries.com Revision 8.0

58 Flare CL User's Manual
Typical bayer test patterns, with moving lines, are shown in Figure 23.
Figure 23. Bayer Test pattern (with moving lines), top in 8x8-bit mode and bottom in 3x8-bit
mode
IO Industries Inc. www.ioindustries.com Revision 8.0

59 Flare CL User's Manual
3.16 Sensor Artifacts
The sensor manufacturer have identified some known artifacts with the CMV2000 and
CMV4000 sensors. The horizontal line and black sun artifacts are discussed in the following
sections, along with the algorithms built into the Flare CL camera series to correct them. For
more information on these artifacts check the sensor manufacturer's website,
www.cmosis.com.
3.16.1 Horizontal Line
The horizontal line artifact may occur when exposure of the next frame starts during the
readout of the current frame. The effect is visible in the line addressed for readout when
exposure of the next frame begins. The effect is a positive or negative offset in the line
addressed for readout.
The horizontal line artifact has been observed in all Camera Output formats, but is most likely
to occur at higher frame rates. If the exposure time is set to the maximum value, for a given
frame period, the line will occur in the third line of the image.
During the readout period of a line there is a 'slot time' where the start of exposure can start
without producing the line effect. When the Horizontal Line Correction algorithm is enabled,
hlc = 1 (default), the start of exposure will be delayed to line up with the slot time. This will
cause up to one line time (see table 11 and table 12) period delay in the start of
exposure. The algorithm also handles the case when multiple exposure signals are used in
the High Dynamic Range exposure modes. To disable the algorithm set the hlc command to
zero.
The slot time can vary slightly when different ADC ramp values are set. Use the hrg
command to move the programmed slot time. The parameter for the hrg command is 4 bits
where the most significant bit is the sign bit (0 - positive, 1 - negative), and the bottom 3 bits is
the adjustment value. For example if the hrg command is set to 2 the programmed slot time
will be delayed by 2 clock cycles. If the hrg command is set to d (in hex), the programmed
slot time will be advanced by 5 clock cycles. The slot time is always measured in the 40 MHz
system clock domain. The analog gain setting also has an effect on the slot time, but this is
handled in the camera firmware automatically.
NOTE that at the fastest Camera Link output formats (8x8/10-bit and 10x8-bit) the
parasitic capacitance is so high in the CMV4000 sensor that there may be no slot time
where the line is invisible. Try the hrg command to see if there is a better slot time when
the line is visible. Another option is to set the exposure to max, given the set frame period,
IO Industries Inc. www.ioindustries.com Revision 8.0

60 Flare CL User's Manual
and remove the first three lines at the frame grabber if the maximum vertical resolution of
2048 is not required for a given application.
3.16.2 Black Sun
The 'Black Sun' effect occurs when a very bright spot is aimed at the sensor, and the center of
the bright spot becomes dark instead of saturated white. This effect is caused by a saturated
reset level from the intense photons, resulting in a pixel value of zero from the Correlated
Double Sampling (CDS) step in the sensor.
This effect can be reduced or eliminated by reducing the light falling on the sensor by closing
the lens iris.
A second option built into the Flare camera firmware is to reduce the time between the pixel
reset and reset sample. Both the CMV2000 and CMV4000 have recommended defaults for
this time resulting in the best CDS result. When the Black Sun correction is turned on, bsc =
1, the time between the pixel reset and reset sample is cut in half. This reduction in time will
eliminate most Black Sun effects. To disable the correction set the bsc command to zero,
default. The noise in the image will increase with the Black Sun correction enabled.
3.17 Bad Pixel Replacement
Each camera is tested for defective pixels. These pixels can be 'dead' pixels (pixel value of
zero when sensor is fully saturated), 'hot' pixels (pixel value of 3FFh when no light is hitting
sensor) and non-uniform pixels which react to light but vary significantly from the average of a
constant greyscale image.
The bad pixel replacement algorithm running in the camera can be enabled or disabled with
the bpx command, 0 - disabled or 1 - enabled. By default the algorithm is enabled. This
command is saved to the user sets.
The algorithm replaces the bad pixels by using an average of neighboring pixels in the
horizontal direction. The list of bad pixels is stored in non-volatile memory in the camera,
which can be read and updated by users. The algorithm can correct up to 255 pixels.
IO Industries Inc. www.ioindustries.com Revision 8.0

61 Flare CL User's Manual
3.18 Temperature
The image sensor has a built in temperature sensor. To read the current temperature send
the tmp command. A sign character is returned (positive value '+' (2Bh) or negative value '-'
(2Dh)) followed by a 2 digit hex value representing degrees in Celsius. An example is shown
below.
Example:
Command: tmp<CR>
Response: +28
<ACK>
In the above example a positive temperature of 40ºC was returned.
The image sensor has an operating range of -30ºC to +70ºC (no condensation). The Flare
CL cameras are built with industrial grade components capable of wide temperature ranges.
The operating range of the camera is -10ºC to 50ºC (relative humidity 20-80%, no
condensation).
3.19 Command Memory
The Flare CL cameras use a non-volatile piece of memory to store up to 8 user command
sets. To save the current camera settings to one of these user sets send the sav command,
with parameter between 1-8. To load from one of the user sets send the lod command, with
parameter between 1-8.
The user sets are programmed prior to shipment. Each Camera Link output format is saved
to one of the user sets. The settings saved are for normal free-run exposure at full resolution.
Table 24 shows the default user set Camera Link output formats.
IO Industries Inc. www.ioindustries.com Revision 8.0

62 Flare CL User's Manual
User Set Camera Link Output
Format
1 Base 2x8-bit (clf 0)
2 Base 2x10-bit
3 Base 3x8-bit
4 Medium 4x8-bit
5 Medium 4x10-bit
6 Full 8x8-bit
7 Plus10 8x10-bit
8 Plus 10x8-bit (clf 7)
Table 24. Default user set Camera Link output formats
For convenience, and to easily remember what settings are programmed in a user set, the
Flare CL cameras store a unique 32 byte name for each user set. To read a user name send
the rnm command, with parameter between 1-8. To change a name follow these steps:
➢ Open the name by sending the onm command, with parameter between 1-8.
➢ Send one ASCII character at a time to the open name using the wnm command, max
32 characters.
➢ When the name is complete send the snm command to save the command.
An example of changing user set 6 name to "flare" is shown below:
➢ onm 6
➢ wnm f
➢ wnm l
➢ wnm a
➢ wnm r
➢ wnm e
➢ snm
Also stored in the camera (in FPGA block ram) is a factory set of commands. To load the
factory set of commands send the fac command. For both the 2M360 and 4M180 the factory
set of commands is full resolution, normal free-run exposure in 8x8-bit Camera Link output
format.
To set the power-up profile send the pup command. Valid settings for the pup command are
IO Industries Inc. www.ioindustries.com Revision 8.0

63 Flare CL User's Manual
1-8, which chooses one of the 8 user sets, or f (in hex) which chooses the factory command
set. If the pup command is sent with a setting between 9 and e (in hex), the factory
command set, f (in hex), will be set.
3.20 Camera Reset
Send the rst command to reset the Flare CL camera. When the reset command is received
the camera will reload various settings from memory (serial number, ADC ramp values, etc),
reload the bad pixel table, and then load the power up profile. The baud rate of the serial
interface does not change after the reset is complete.
3.21 Reduced Line Rate
The spd command can be used to reduce the line rate of the camera's output when using CL
Full 8x8-bit or CL Plus10 8x10-bit output formats. The spd command is ignored in all other
CL output formats. Reducing the line rate may be necessary when using older PCIe x4 frame
grabbers.
To reduce the line rate, first set the spd command to 1, followed by the clf command set to
either 5 or 6. The spd command is savable to the user sets.
Table 25 shows the Frame Overhead Time, Exposure Overhead Time, Line and minimum
Inter-Frame time for the 2M360 and 4M180 in Full and Plus10 output formats in reduced line
rate mode.
Table 26 shows some sample frame rates in reduced line rate mode.
Flare CL Model Camera Link Output
Format
2M360 Full/ Plus10 8x8/10-bit 43 16 3.58 27
4M180 Full/Plus10 8x8/10-bit 79 31 3.58 48
Table 25. FOT, EOT, Line Times and Inter-Frame time with reduced line rate (spd = 1)
FOT
(in µs)
EOT
(in µs)
Line Time
(in µs)
Minimum
Inter-Frame
Time (in µs)
IO Industries Inc. www.ioindustries.com Revision 8.0

64 Flare CL User's Manual
Maximum Frame Rate
(Hz)
Camera
Link
Format
Table 26. Sample frame rates (*4M180 only) with reduced line rate (spd = 1)
8 x 8/10-bit
(spd = 1)
2048
x
2048*
135 179 255 270 475 568 1108
2048
x
1536*
1920
1080
x
Resolution
1280
x
1024
960
x
576
640
x
480
320
x
240
IO Industries Inc. www.ioindustries.com Revision 8.0

65 Flare CL User's Manual
4 Control Utility
A standalone utility is provided for control of the Flare CL series. The utility, flare_ctrl.exe,
uses a module provided by the frame grabber manufacturer to communicate over the Camera
Link serial port. The frame grabber module is a Dynamic Link Library (*.dll), with naming
convention clserXXX.dll and can be found in the /cameralink/serial or windows/system32
folders on a system running a Windows operating system.
4.1 Installation
Follow these steps to install the Flare CL Camera Control software:
➢ Run flare.exe to start the installation.
➢ Press 'Next' at the 'Welcome to the IO Industries Inc. Flare Camera Setup Wizard'
dialog to continue with the installation.
➢ Choose the destination folder in the 'Choose Install Location' dialog and press 'Next'.
➢ Select components to install on the 'Choose Components' dialog. The 'Flare' check
box should be checked and it is optional to instal a Start Menu shortcut. Press 'Next'
➢ Press 'Finish' on the 'Completing the IO Industries Inc. Flare Camera Setup Wizard'
dialog.
4.2 Connect to Flare
The control utility automatically scans available Camera Link ports within the system looking
for Flare CL cameras. If a single camera is found all parameters are queried from the
camera to populate the utility dialogs. The control utility with the General tab selected is
shown in Figure 24.
The control utility changes the baud rate of the serial communication from the camera's power
up default (9600) to the maximum baud rate supported by both the camera and frame
grabber. The baud rate can be forced to stay at the default 9600 rate by starting the utility
from a Windows command prompt with a '-9600' flag as shown below:
c:\program files\io industries\flare\bin>flare_ctrl.exe - 9600
IO Industries Inc. www.ioindustries.com Revision 8.0

66 Flare CL User's Manual
Figure 24. Flare Camera Control, General Tab selected
The 2 icons at the top of the utility are:
➢ Refresh (arrows icon)
➢ Show Log Window (book with pencil icon)
IO Industries Inc. www.ioindustries.com Revision 8.0

67 Flare CL User's Manual
4.3 General Tab
The General tab, shown in Figure 24, has the following sections:
➢ Camera Information - Shows camera model, serial number, firmware version and
current sensor temperature.
➢ Stored Profiles - Use to manage camera user sets. Load, save and rename user
settings, set the power-up profile or load the factory settings.
➢ Camera Link Output - Set the CL output format.
➢ Reset Camera - press button to re-initialize camera.
4.4 Exposure Tab
Figure 25. Exposure tab, Free-Run exposure mode selected
IO Industries Inc. www.ioindustries.com Revision 8.0

68 Flare CL User's Manual
The exposure tab is shown in Figure 25.
With Free-run programmable exposure mode selected change the frame rate and exposure
time using the controls within the 'Basic Settings' section. Slide the bar to the desired time, or
enter a value and press 'Apply'.
Select the exposure mode of the camera using the 'Mode' drop down list. The dialog will
change depending on the selection. Figure 26 shows the exposure tab when the edge
triggered programmable exposure is used.
Figure 26. Exposure tab, Edge-triggered programmable exposure
mode selected
When the camera is in Edge-triggered programmable exposure mode the frame rate setting is
disabled, and the 'Trigger 1' settings become visible. Select the input source for the trigger
and the edge.
In Edge-triggered level controlled exposure mode the exposure time setting is also disabled.
Select the input source for the trigger and the state of the trigger for exposure.
IO Industries Inc. www.ioindustries.com Revision 8.0

69 Flare CL User's Manual
In Edge-triggered double exposure set the input source and edge for the trigger. The
exposure time in this mode is for the 'dark' frame.
Select a high dynamic range (HDR) exposure mode using the 'Mode' drop down list in the
'High Dynamic Range' section. The two HDR exposure modes available are Interleaved and
Piecewise. The exposure tab with Interleaved HDR exposure mode is shown in Figure 27.
Figure 27. Exposure tab, Interleaved HDR mode selected
With Interleaved HDR mode selected two exposure time settings become visible.
IO Industries Inc. www.ioindustries.com Revision 8.0

70 Flare CL User's Manual
Figure 28 shows the exposure tab when Piecewise HDR mode is selected.
Figure 28. Exposure tab, Piecewise HDR mode selected (1
kneepoint, 2 slopes)
With Piecewise HDR mode selected a graph showing the exposure hold time versus the level
is shown. Adjust the kneepoints on the graph by clicking and dragging the kneepoints in the
IO Industries Inc. www.ioindustries.com Revision 8.0

71 Flare CL User's Manual
graph, or by the settings options at the bottom of the tab.
The level value is shown as a percentage of the voltage range. The 'Hold Time' is the total
exposure time minus the kneepoint exposure time.
Figure 29. Exposure tab, Auto Exposure mode selected
Figure 29 shows the exposure tab when an Auto Exposure mode is selected. Auto exposure
is only available in Free-Run exposure mode with HDR disabled.
IO Industries Inc. www.ioindustries.com Revision 8.0

72 Flare CL User's Manual
Use the Mode drop down list to select the desired mode. Note that the gain used is digital
gain.
To change the target luma value enter a value into the Target Luma edit box and press Apply,
or use the slider control.
Minimum and maximum exposure times are set to ensure that the exposure time stays within
a desired range. When using a gain mode, the minimum and maximum gain values can also
be set. The digital gain is set in increments of 1/16 giving a range of 1x up to 16x. The
maximum gain can be limited to avoid over-gained, noisy images.
The minimum and maximum aperture settings are used to limit the lens aperture range when
in an aperture mode. The aperture setting mirrors the lens F-number, where smaller numbers
indicate that the aperture is larger, allowing more light into the lens.
The Speed control slider bar can be used to adjust the reaction time and convergence to the
target of the auto exposure algorithm. There are four speeds to choose from ranging from
slow to fast.
The average luma value can be taken over the entire image or in a customized set of zones
within the image. Use the Are drop-down list to select the desired auto exposure area. When
Zones are selected an additional control is added that allows for selection/deselection of
portions of the full image with a click, as shown in Figure 30. A list of commonly used patterns
is also available for quicker configuration.
Figure 30. Zone Selection
IO Industries Inc. www.ioindustries.com Revision 8.0

73 Flare CL User's Manual
4.5 Image Tab
The image tab is shown in Figure 31.
Figure 31. Image tab
This tab contains controls for analog and digital gains, ADC ramp slope, image correction
algorithms, digital offset, image sub-sample and image flipping.
IO Industries Inc. www.ioindustries.com Revision 8.0

74 Flare CL User's Manual
4.6 Balance Tab
The Balance tab, shown in Figure 32, is only valid for color cameras.
Figure 32. Balance tab
Multipliers on the red and blue pixels can be adjusted here to achieve the desired white
balance. One-time auto white balance can be calculated by clicking either of the white blance
buttons at the bottom of the tab.
IO Industries Inc. www.ioindustries.com Revision 8.0
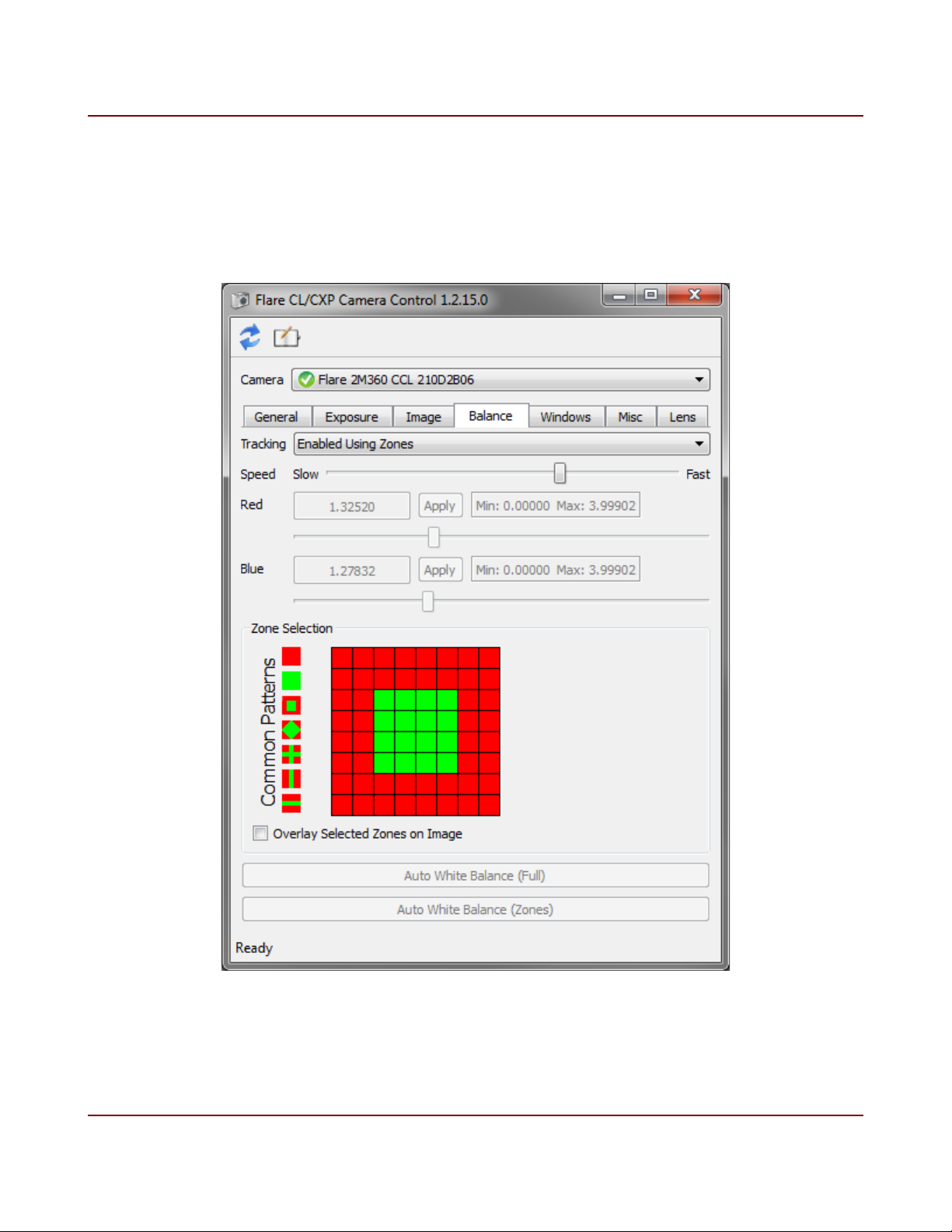
75 Flare CL User's Manual
The camera can also continuously update the multipliers if a tracking white balance mode is
selected from the Tracking drop-down list. The white balance calculations can be performed
using either the entire image, or selected zones (Figure 33).
Figure 33. Balance tab, tracking white balance using selected zones
IO Industries Inc. www.ioindustries.com Revision 8.0

76 Flare CL User's Manual
4.7 Windows Tab
The Windows tab is shown in Figure 34.
Figure 34. Windows tab
Press the 'Reset' button to restore the window settings to one window at the maximum
resolution.
All windows must have the same horizontal resolution, set by the 'Global Window Width' entry.
Press the 'Max' button to restore to the maximum width.
IO Industries Inc. www.ioindustries.com Revision 8.0

77 Flare CL User's Manual
To add a second window, first set the desired position and size of the first window. Once
there is space below the first window place the cursor inside the window area and draw a
second window. The X, Y and Ht settings for the second window will appear automatically.
Continue this procedure to add up to 8 windows.
4.8 Miscellaneous Tab
The Miscellaneous tab is shown in Figure 35.
Figure 35. Miscellaneous tab
This tab contains the controls to enable or disable the test pattern output from the camera,
and has the selection for the output triggers on the power connector. The INTE1 signal
corresponds to the primary exposure (ex1 command). The INTE2 signal corresponds to the
secondary exposure (ex2 command) used in Interleaved and Piecewise HDR exposure
modes.
IO Industries Inc. www.ioindustries.com Revision 8.0

78 Flare CL User's Manual
This tab also contains controls to export or import the bad pixel map from/to a camera. The
file is created with a .bpm extension and can viewed or edited with a simple text editor. Bad
pixels are listed one per line, with the row number first followed by the column number,
separated by a comma (no spaces). The row numbers are in the range 1-1088 for the 2M360
and 1-2048 for the 4M180. Column numbers are listed from 1-2048. Pixels must be listed in
the same order as the readout, from top to bottom and left to right. A camera with no bad
pixels will create an empty file. Example entries are shown in Figure 36.
148,72
148,2000
1001,6
Figure 36. Example bad pixel map
4.9 Lens Tab
The Lens tab is shown in Figure 37 on page 79. It is used to control an optional Canon EF
lens mount.
The aperture setting controls the iris in the lens to vary the amount of light it allows into the
camera. An aperture value of zero corresponds to a fully open aperture. The maximum
number of aperture steps varies from lens to lens.
The large arrow buttons are used to change the focus position of the lens. From left to right,
the button functions are: move focus to minimum, step focus towards minimum, step focus
towards infinity, move focus to infinity. The step size adjustment controls how far the lens
moves with each press of the step arrows. The effect of the step size can vary from lens to
lens. Focus control is disabled when the lens is in manual focus mode.
Information about the current state of the lens is displayed in the Status area. Any value that
the lens does not report to the camera will be displayed as zero. If an EF lens is not
connected to the camera, the Present box will be empty and all controls on this page will be
grayed-out.
The Direct Lens Control window is used to directly communicate with and control the lens
adapter. When focus leaves this window, the lens is reset and reverts to camera control.
IO Industries Inc. www.ioindustries.com Revision 8.0

79 Flare CL User's Manual
Figure 37. Lens tab
IO Industries Inc. www.ioindustries.com Revision 8.0

80 Flare CL User's Manual
5 Firmware Update Utility
With firmware version 03 (ver command), or higher, it is possible to update the Flare CL
firmware through the Camera Link serial port. Non-volatile flash memory is used to store the
FPGA firmware in the Flare CL cameras. If power to the camera is lost during the update
process, or power is cycled on a camera after an unsuccessful update, the camera will no
longer function and will have to be returned to IO Industries for programming, at the expense
of the customer. This is an advanced operation, and for this reason the firmware update utility
and firmware files are not distributed on the CDs included with a Flare CL camera. Please
contact support at IO Industries if a firmware update is required.
Figure 38 shows the firmware update utility.
Figure 38. Firmware update utility
IO Industries Inc. www.ioindustries.com Revision 8.0

81 Flare CL User's Manual
The utility will list all cameras found in a system. It is possible to program multiple cameras at
the same time, however they must be the same type. Select the file to program using the
Browse button. Check the Update? checkbox beside the camera to update. Finally press
Update Firmware. This operation may take several minutes to complete, do not shut down
the application or cycle power on the camera while the operation is in progress. The progress
of the operation is shown on the status line for each camera, see Figure 39.
Figure 39. Firmware update utility, progress highlighted
IO Industries Inc. www.ioindustries.com Revision 8.0
82 Flare CL User's Manual
6 Document Revision History
Revision Date Modification
1.0 03/09/2011 Initial Release
2.0 04/19/2011 - Updated command list for spd command.
Added section 3.17.
- Updated adc command description.
Changed description of command to 'Ramp'
instead of 'Gain'.
- Updated screen shots of General and Image
tabs of control application.
3.0 05/06/2011 - Added description on firmware update
feature.
4.0 06/28/2011 - Updated digital offset description (reflecting
firmware revision 04).
- New spectral response curves.
5.0 07/21/2011 - Updated minimum exposure times according
to new sensor manufacturer specifications.
Exposure Overhead Time (EOT) changed by
factor (0.43/0.65), reducing the minimum
exposure times, but increasing minimum inter-
frame times. See section 3.6 and section
3.17.
- Updated control utility screen shots. New
features include: manufacturer dll selection,
command line baud rate option and bad pixel
map export/import.
6.0 10/18/2011 - Added more description to color test pattern
section, and added 3x8-bit color test pattern
screen shot.
7.0 11/18/2011 - Updated Tables 11, 12, 14 and 16 to reflect
new FPGA firmware version 7 horizontal
timing zones in 3x8-bit CL Base output format.
See section 3.6.
- Updated description of test pattern blanking
periods. See section 3.10.
IO Industries Inc. www.ioindustries.com Revision 8.0

83 Flare CL User's Manual
8.0 01/07/2014 - Added new commands for white balance,
auto exposure and lens control
- Updated control utility screen shots. New
features include: auto exposure, white
balance, and lens control.
IO Industries Inc. www.ioindustries.com Revision 8.0

84 Flare CL User's Manual
7 Firmware Revision History
Revision Date Modification
01 03/04/2011 Initial Release
02 04/19/2011
New Feature(s):
- Added spd command to slow down the line
rate for 8x8/10-bit Camera Link output formats.
Line rate was too high for some PCIe x4 frame
grabbers. See section 3.17.
- Made adc command savable to user set
memory, with option to restore factory
calibrated value.
- Changed description of adc command to
ADC Ramp.
Fixed Bug(s):
- Incorrect color test pattern in 3x8-bit CL
output format.
- Incorrect bit assignments for 2x10-bit and
4x10-bit CL output formats when test pattern
enabled (color or mono).
- Bad lines (1-8) at top of image when sub
sample enabled or disabled while camera
outputting frames and with clf set to 0-4.
Problem not seen on power-up.
03 05/06/2011
04 06/28/2011
New Feature(s):
- Added rmp command
- Support for firmware update through Camera
Link serial port, see section 5.
Modified Feature(s):
- Changed digital offset setting, see section
3.8.1.
05 07/21/2011
Modified Feature(s):
- Updated minimum exposure times according
to new sensor manufacturer specifications.
Exposure Overhead Time (EOT) changed by
IO Industries Inc. www.ioindustries.com Revision 8.0

85 Flare CL User's Manual
Revision Date Modification
factor (0.43/0.65), reducing the minimum
exposure times, but increasing minimum inter-
frame times. See section 3.6 and section
3.17.
06 10/18/2011
07 11/18/2011
08 01/07/2014
Fixed Bug(s):
- Factory profile (8x8-bit CL Full) was not
loading calibrated adc values (ramp and gain).
- Vertical moving line in test pattern reset to
first column too early when pixel counter rolled
over (in 2/3/4x8-bit CL modes).
New Feature(s):
- Added support for 8 horizontal timing zones
for 3x8-bit CL Base output format. Increased
frame rate acheived by using all available
factory calibrated sensor clock frequencies in
this format (30, 36, 40 and 48MHz).
- Added more clock cycles to horizontal
blanking period for test pattern output. See
section 3.10.
Fixed Bug(s):
- Test pattern output did not change image
height when sub-sample enabled, causing
frame rate to be cut in half.
New Feature(s):
- Added custom LUT support.
- Added white balance control and auto white
balance (color cameras only).
- Added auto exposure, gain, and aperture
control.
- New 8x8 zone system for controlling auto
white balance and auto exposure.
- Added support for Canon EF mount.
- Added correction for column fixed pattern
noise.
Fixed Bug(s):
- Support new CameraLink standard 8x10
mapping with cls command (0-IOI, 1-CL).
IO Industries Inc. www.ioindustries.com Revision 8.0

86 Flare CL User's Manual
8 Appendix A CL Plus/Plus10 Pinouts
Camera Link Channel X Camera Link Channel Y Camera Link Channel Z
Signal
Name
D0_0 Tx0 Rx0 D2_6 Tx0 Rx0 D5_3 Tx0 Rx0
D0_1 Tx1 Rx1 D2_7 Tx1 Rx1 D5_4 Tx1 Rx1
D0_2 Tx2 Rx2 D2_8 Tx2 Rx2 D5_5 Tx2 Rx2
D0_3 Tx3 Rx3 D2_9 Tx3 Rx3 D5_6 Tx3 Rx3
D0_4 Tx4 Rx4 D3_0 Tx4 Rx4 D5_7 Tx4 Rx4
D0_5 Tx5 Rx5 D3_1 Tx5 Rx5 D5_8 Tx5 Rx5
D0_6 Tx6 Rx6 D3_2 Tx6 Rx6 D5_9 Tx6 Rx6
D0_7 Tx7 Rx7 D3_3 Tx7 Rx7 D6_0 Tx7 Rx7
D0_8 Tx8 Rx8 D3_4 Tx8 Rx8 D6_1 Tx8 Rx8
D0_9 Tx9 Rx9 D3_5 Tx9 Rx9 D6_2 Tx9 Rx9
D1_0 Tx10 Rx10 D3_6 Tx10 Rx10 D6_3 Tx10 Rx10
D1_1 Tx11 Rx11 D3_7 Tx11 Rx11 D6_4 Tx11 Rx11
D1_2 Tx12 Rx12 D3_8 Tx12 Rx12 D6_5 Tx12 Rx12
D1_3 Tx13 Rx13 D3_9 Tx13 Rx13 D6_6 Tx13 Rx13
D1_4 Tx14 Rx14 D4_0 Tx14 Rx14 D6_7 Tx14 Rx14
D1_5 Tx15 Rx15 D4_1 Tx15 Rx15 D6_8 Tx15 Rx15
D1_6 Tx16 Rx16 D4_2 Tx16 Rx16 D6_9 Tx16 Rx16
D1_7 Tx17 Rx17 D4_3 Tx17 Rx17 D7_0 Tx17 Rx17
D1_8 Tx18 Rx18 D4_4 Tx18 Rx18 D7_1 Tx18 Rx18
D1_9 Tx19 Rx19 D4_5 Tx19 Rx19 D7_2 Tx19 Rx19
D2_0 Tx20 Rx20 D4_6 Tx20 Rx20 D7_3 Tx20 Rx20
D2_1 Tx21 Rx21 D4_7 Tx21 Rx21 D7_4 Tx21 Rx21
D2_2 Tx22 Rx22 D4_8 Tx22 Rx22 D7_5 Tx22 Rx22
D2_3 Tx23 Rx23 D4_9 Tx23 Rx23 D7_6 Tx23 Rx23
LVAL Tx24 Rx24 D5_0 Tx24 Rx24 D7_7 Tx24 Rx24
FVAL Tx25 Rx25 D5_1 Tx25 Rx25 D7_8 Tx25 Rx25
D2_4 Tx26 Rx26 D5_2 Tx26 Rx26 D7_9 Tx26 Rx26
D2_5 Tx27 Rx27 LVAL Tx27 Rx27 LVAL Tx27 Rx27
Camera
Transmit
Pin
Frame
Grabber
Receive Pin
Signal
Name
Camera
Transmit
Pin
Frame
Grabber
Receive Pin
Signal
Name
Camera
Transmit
Pin
Table 27. Camera Link Plus (10x8-bit) bit mapping
Frame
Grabber
Receive Pin
IO Industries Inc. www.ioindustries.com Revision 8.0

87 Flare CL User's Manual
Camera Link Channel X Camera Link Channel Y Camera Link Channel Z
Signal
Name
D0_0 Tx0 Rx0 D3_2 Tx0 Rx0 D6_5 Tx0 Rx0
D0_1 Tx1 Rx1 D3_3 Tx1 Rx1 D6_6 Tx1 Rx1
D0_2 Tx2 Rx2 D3_4 Tx2 Rx2 D6_7 Tx2 Rx2
D0_3 Tx3 Rx3 D3_5 Tx3 Rx3 D7_0 Tx3 Rx3
D0_4 Tx4 Rx4 D3_6 Tx4 Rx4 D7_1 Tx4 Rx4
D0_5 Tx5 Rx5 D3_7 Tx5 Rx5 D7_2 Tx5 Rx5
D0_6 Tx6 Rx6 D4_0 Tx6 Rx6 D7_3 Tx6 Rx6
D0_7 Tx7 Rx7 D4_1 Tx7 Rx7 D7_4 Tx7 Rx7
D1_0 Tx8 Rx8 D4_2 Tx8 Rx8 D7_5 Tx8 Rx8
D1_1 Tx9 Rx9 D4_3 Tx9 Rx9 D7_6 Tx9 Rx9
D1_2 Tx10 Rx10 D4_4 Tx10 Rx10 D7_7 Tx10 Rx10
D1_3 Tx11 Rx11 D4_5 Tx11 Rx11 D8_0 Tx11 Rx11
D1_4 Tx12 Rx12 D4_6 Tx12 Rx12 D8_1 Tx12 Rx12
D1_5 Tx13 Rx13 D4_7 Tx13 Rx13 D8_2 Tx13 Rx13
D1_6 Tx14 Rx14 D5_0 Tx14 Rx14 D8_3 Tx14 Rx14
D1_7 Tx15 Rx15 D5_1 Tx15 Rx15 D8_4 Tx15 Rx15
D2_0 Tx16 Rx16 D5_2 Tx16 Rx16 D8_5 Tx16 Rx16
D2_1 Tx17 Rx17 D5_3 Tx17 Rx17 D8_6 Tx17 Rx17
D2_2 Tx18 Rx18 D5_4 Tx18 Rx18 D8_7 Tx18 Rx18
D2_3 Tx19 Rx19 D5_5 Tx19 Rx19 D9_0 Tx19 Rx19
D2_4 Tx20 Rx20 D5_6 Tx20 Rx20 D9_1 Tx20 Rx20
D2_5 Tx21 Rx21 D5_7 Tx21 Rx21 D9_2 Tx21 Rx21
D2_6 Tx22 Rx22 D6_0 Tx22 Rx22 D9_3 Tx22 Rx22
D2_7 Tx23 Rx23 D6_1 Tx23 Rx23 D9_4 Tx23 Rx23
LVAL Tx24 Rx24 D6_2 Tx24 Rx24 D9_5 Tx24 Rx24
FVAL Tx25 Rx25 D6_3 Tx25 Rx25 D9_6 Tx25 Rx25
D3_0 Tx26 Rx26 D6_4 Tx26 Rx26 D9_7 Tx26 Rx26
D3_1 Tx27 Rx27 LVAL Tx27 Rx27 LVAL Tx27 Rx27
Camera
Transmit
Pin
Frame
Grabber
Receive Pin
Signal
Name
Camera
Transmit
Pin
Frame
Grabber
Receive Pin
Signal
Name
Camera
Transmit
Pin
Table 28: Camera Link Plus10 (8x10-bit) bit mapping
Frame
Grabber
Receive Pin
IO Industries Inc. www.ioindustries.com Revision 8.0
 Loading...
Loading...