


®
ISL6322
Data Sheet
Four-Phase Buck PWM Controller with
Integrated MOSFET Drivers and I2C
Interface for Intel VR10, VR11, and AMD
Applications
The ISL6322 four-phase PWM control IC provides a
precision voltage regulation system for advanced
microprocessors. The integration of power MOSFET drivers
into the controller IC marks a departure from the separate
PWM controller and driver configuration of previous
multiphase product families. By reducing the number of
external parts, this integration is optimized for a cost and
space saving power management solution.
One outstanding feature of this controller IC is its
multi-processor compatibility, allowing it to work with both Intel
and AMD microprocessors. Included are programmable VID
codes for Intel VR10, VR11, as well as AMD DAC t ables. A
unity gain, differential amplifier is provided for remote voltage
sensing, compensating for any potential difference between
remote and local grounds. The output voltage can also be
positively or negatively offset through the use of a single
external resistor.
The ISL6322 includes an I
controller to communicate with other devices over an I
bus. Signals sent over this bus can command the ISL6322 to
adjust voltage margining offset, converter switching
frequency, and overvoltage protection levels, and can select
the integrated driver adaptive dead time scheme.
The ISL6322 also includes advanced control loop features
for optimal transient response to load apply and removal.
One of these features is highly accurate, fully differential,
continuous DCR current sensing for load line programming
and channel current balance. Active Pulse Positioning (APP)
modulation is another unique feature, allowing for quicker
initial response to high di/dt load transients.
This controller also allows the user the flexibility to choose
between PHASE detect or LGATE detect adaptive dead time
schemes. This ability allows the ISL6322 to be used in a
multitude of applications where either scheme is required.
Protection features of this controller IC include a set of
sophisticated overvoltage, undervoltage, and overcurrent
protection. Furthermore, the ISL6322 includes protection
against an open circuit on the remote sensing inputs.
Combined, these features provide advanced protection for the
microprocessor and power system.
2
C interface, allowing the
2
C
August 2, 2007
FN6328.2
Features
• Integrated Multiphase Power Conversion
- 2-Phase or 3-Phase Operation with Internal Drivers
- 4-Phase Operation with External PWM Driver Signal
• Precision Core Voltage Regulation
- Differential Remote Voltage Sensing
- ±0.5% System Accuracy Over-Temperature
- Adjustable Reference-Voltage Offset
• Optimal Transient Response
- Active Pulse Positioning (APP) Modulation
- Adaptive Phase Alignment (APA)
• Fully Differential, Continuous DCR Current Sensing
- Accurate Load Line Programming
- Precision Channel Current Balancing
2
C Interface
•I
- Voltage Margining Offset
- Switching Frequency Adjustment
- Overvoltage Protection Level Adjustment
- Selects Adaptive Dead Time Scheme
2
• User Selectable I
1000_110x or 1000_111x
• User Selectable Adaptive Dead Time Scheme
- PHASE Detect or LGATE Detect for Application
Flexibility
• Variable Gate Drive Bias: 5V to 12V
• Multi-Processor Compatible
- Intel VR10 and VR11 Modes of Operation
- AMD Mode of Operation
• Microprocessor Voltage Identification Inputs
-8-bit DAC
- Selectable between Intel’s Extended VR10, VR11, AMD
5-bit, and AMD 6-bit DAC Tables
- Dynamic VID Technology
• Overcurrent Protection
• Multi-Tiered Overvoltage Protection
• Digital Soft-Start
• Selectable Operation Frequency up to 1.5MHz Per Phase
• Pb-Free Plus Anneal Available (RoHS Compliant)
C “Slave Only” Device Address:
1
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
1-888-INTERSIL or 1-888-468-3774
| Intersil (and design) is a registered trademark of Intersil Americas Inc.
Copyright Intersil Americas Inc. 2006, 2007. All Rights Reserved
All other trademarks mentioned are the property of their respective owners.
ISL6322ISL6322
Ordering Information
PART NUMBER (Note) PART MARKING TEMP. (°C) PACKAGE (Pb-Free) PKG. DWG. #
ISL6322CRZ* ISL6322 CRZ 0 to +70 48 Ld 7x7 QFN L48.7x7
ISL6322IRZ* ISL6322 IRZ -40 to +85 48 Ld 7x7 QFN L48.7x7
*Add “-T” suffix for tape and reel. Please refer to TB347 for details on reel specifications.
NOTE: Intersil Pb-free plus anneal products employ special Pb-free material se ts; mold ing compounds/ die attach m aterials and 100% mat te tin plate
termination finish, which are RoHS compliant and compatible with both SnPb and Pb-free soldering operations. Intersil Pb-free product s are MSL
classified at Pb-free peak reflow temperatures that meet or exceed the Pb-f ree re quirements of IPC/JEDEC J STD-020.
Pinout
ISL6322
(48 LD QFN)
TOP VIEW
PHASE3
VID6
VID7
VID5
48
47 46 45 44 43 42 41 40 39
FS
ISEN3-
ISEN3+
PVCC3
LGATE3
BOOT3
UGATE3
PGOOD
38 37
VID4
VID3
VID2
VID1
VID0
VRSEL
SCL
SDA
SS/RST/A0
VCC
REF
OFS
1
2
3
4
5
RGND
49
GND
VSEN
6
7
8
9
10
11
12
13 14 15 16 17 18 19 20 21 22
FB
COMP
VDIFF
IDROOP
ISEN2+
ISEN2-
EN
36
ISEN1+
35
ISEN1-
34
PHASE1
33
UGATE1
32
BOOT1
31
LGATE1
30
PVCC1_2
29
LGATE2
28
BOOT2
27
UGATE2
26
PHASE2
25
23 24
ISEN4-
ISEN4+
PWM4
EN_PH4
2
FN6328.2
August 2, 2007
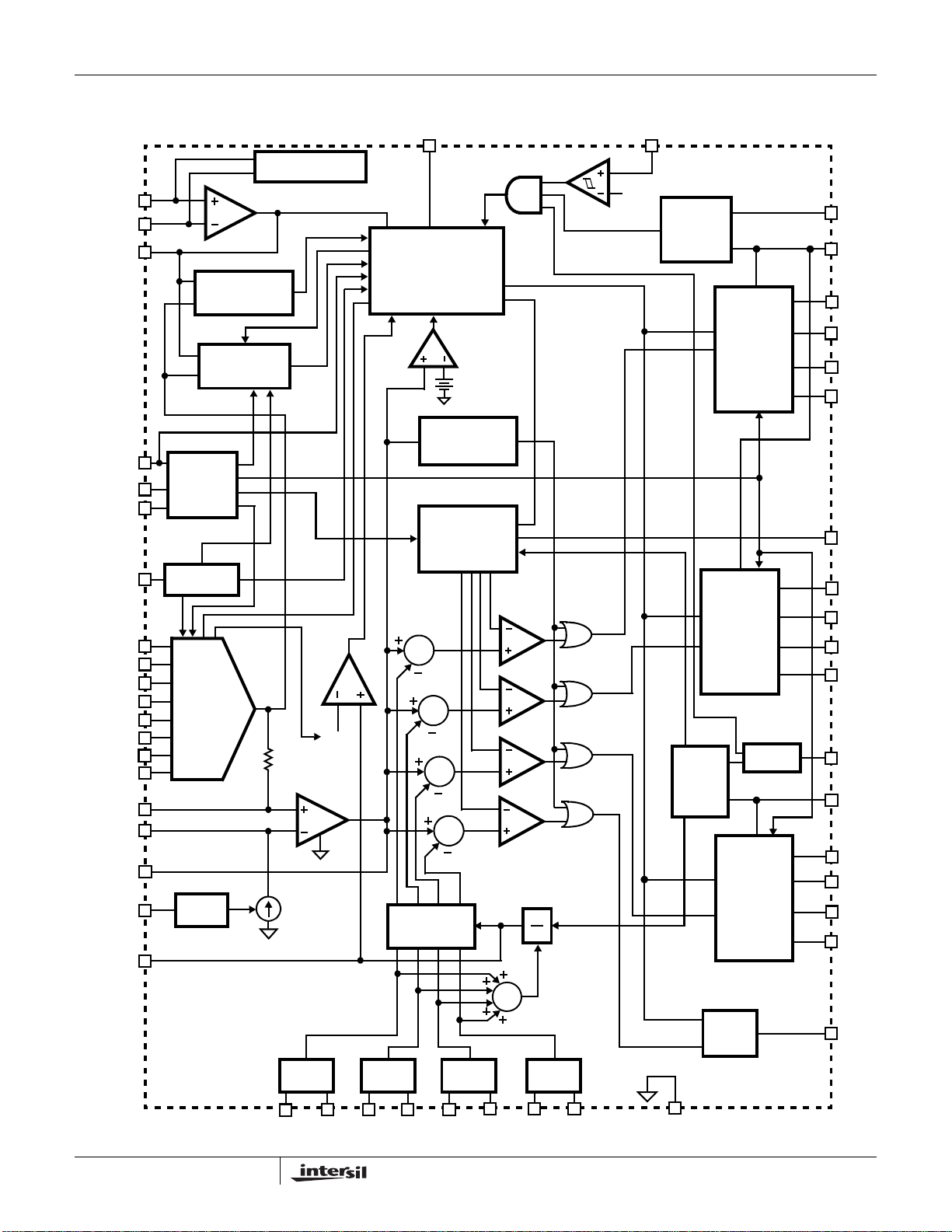
Block Diagram
VSEN
RGND
VDIFF
OPEN SENSE
LINE PREVENTION
x1
UNDERVOLTAGE
DETECTION
LOGIC
ISL6322ISL6322
PGOOD
SOFT-START
AND
FAULT LOGIC
0.85V
EN
POWER-ON
RESET
VCC
PVCC1_2
BOOT1
SS/RST/A0
SCL
SDA
VRSEL
VID7
VID6
VID5
VID4
VID3
VID2
VID1
VID0
REF
FB
COMP
OFS
IDROOP
OVERVOLTAGE
DETECTION
I2C
LOGIC
MODE/DAC
SELECT
DYNAMIC
VID
D/A
OFFSET
LOGIC
E/A
OC
I_TRIP
I_AVG
LOAD APPL Y
TRANSIENT
ENHANCEMENT
CLOCK AND
MODULATOR
WAVEFORM
GENERAT OR
∑
∑
∑
∑
CHANNEL
CURRENT
BALANCE
0.2V
I_AVG
MOSFET
DRIVER
CHANNEL
DETECT
MOSFET
DRIVER
PH4 POR/
MOSFET
DRIVER
DETECT
PWM1
PWM2
PWM3
PWM4
1
N
UGATE1
PHASE1
LGATE1
FS
BOOT2
UGATE2
PHASE2
LGATE2
EN_PH4
PVCC3
BOOT3
UGATE3
PHASE3
LGATE3
ISEN1-
3
CH1
CURRENT
SENSE
ISEN1+
CURRENT
SENSE
ISEN2-
CH2
ISEN2+
CURRENT
SENSE
ISEN3-
CH3
ISEN3+
∑
CURRENT
SENSE
ISEN4-
CH4
ISEN4+
GND
PWM4
SIGNAL
LOGIC
PWM4
FN6328.2
August 2, 2007
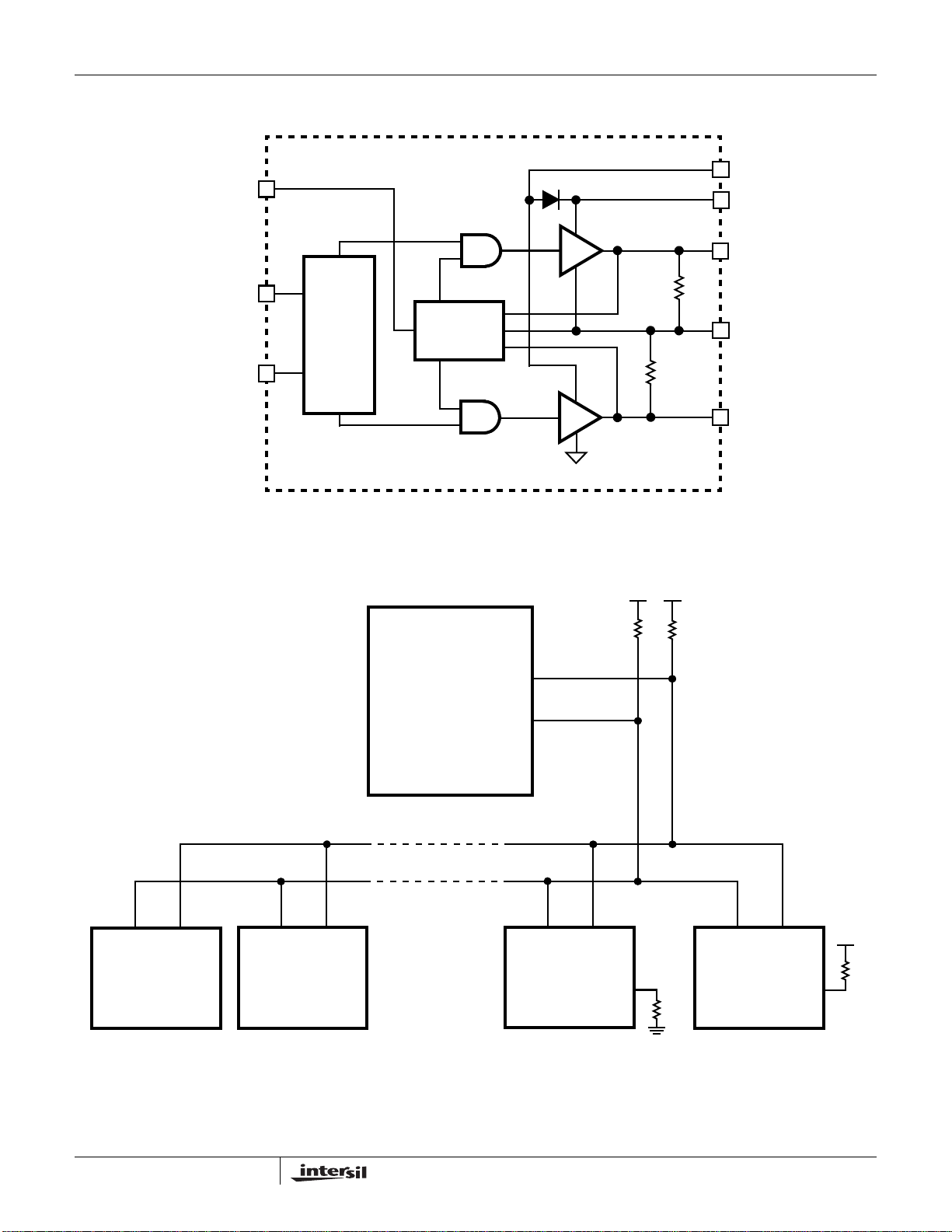
ISL6322 Integrated Driver Block Diagram
DRSEL
ISL6322ISL6322
PVCC
BOOT
UGATE
PWM
GATE
CONTROL
SOFT-START
AND
FAULT LOGIC
LOGIC
Simplified I2C Bus Architecture
SHOOT-
THROUGH
PROTECTION
2
C BUS
I
MASTER
SDA
SCL
+5V
20kΩ
PHASE
10kΩ
LGATE
+5V
SCL SDA
SLAVE
IC #1
SCL SDA
SLAVE
IC #2
4
SCL SDA
ISL6322
SLAVE ADDRESS:
1000_110x
NOTE: PIN A0 SELECTS THE SLAVE ADDRESS FOR THE ISL6322
A0
R
SS
SCL SDA
ISL6322
SLAVE ADDRESS:
1000_111x
+5V
A0
FN6328.2
August 2, 2007
R
SS
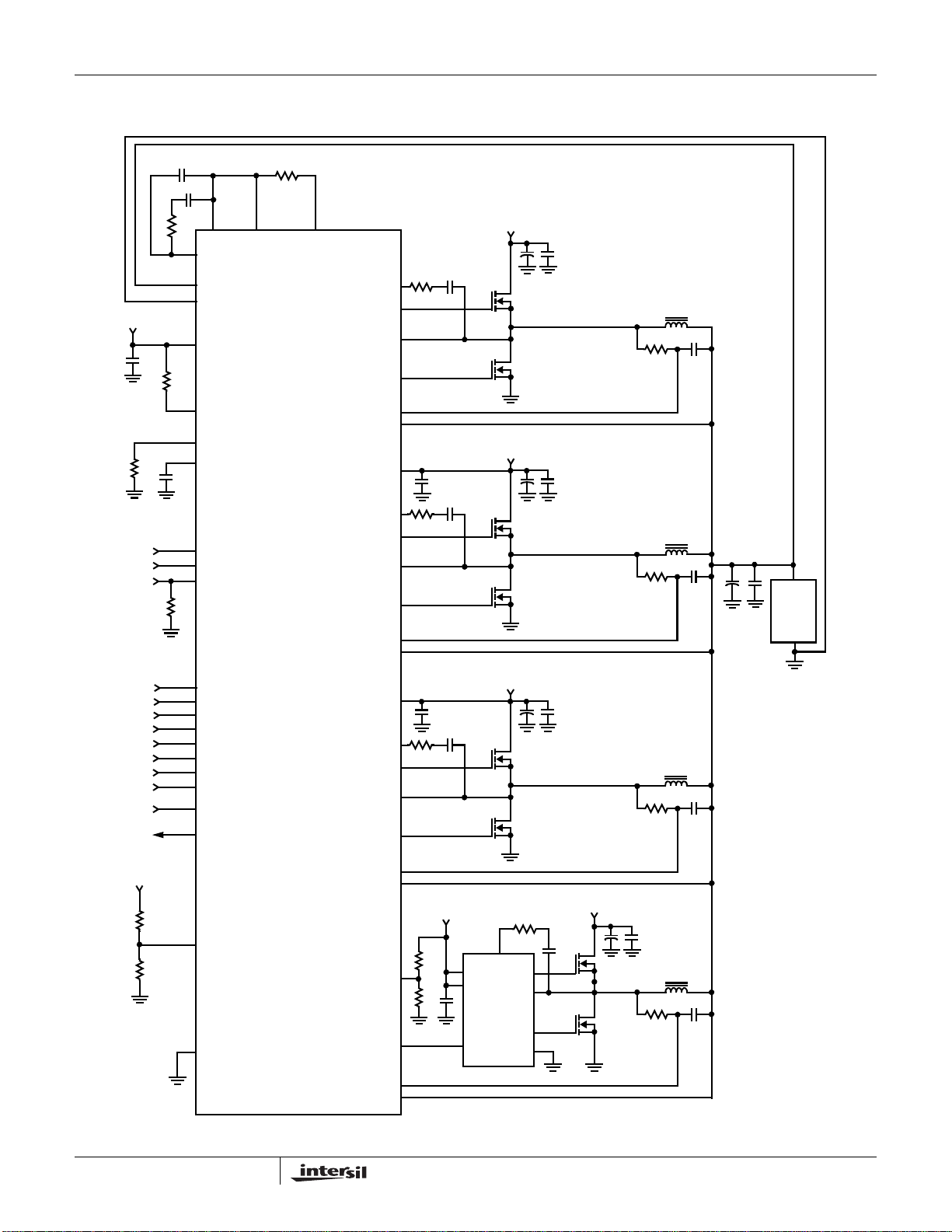
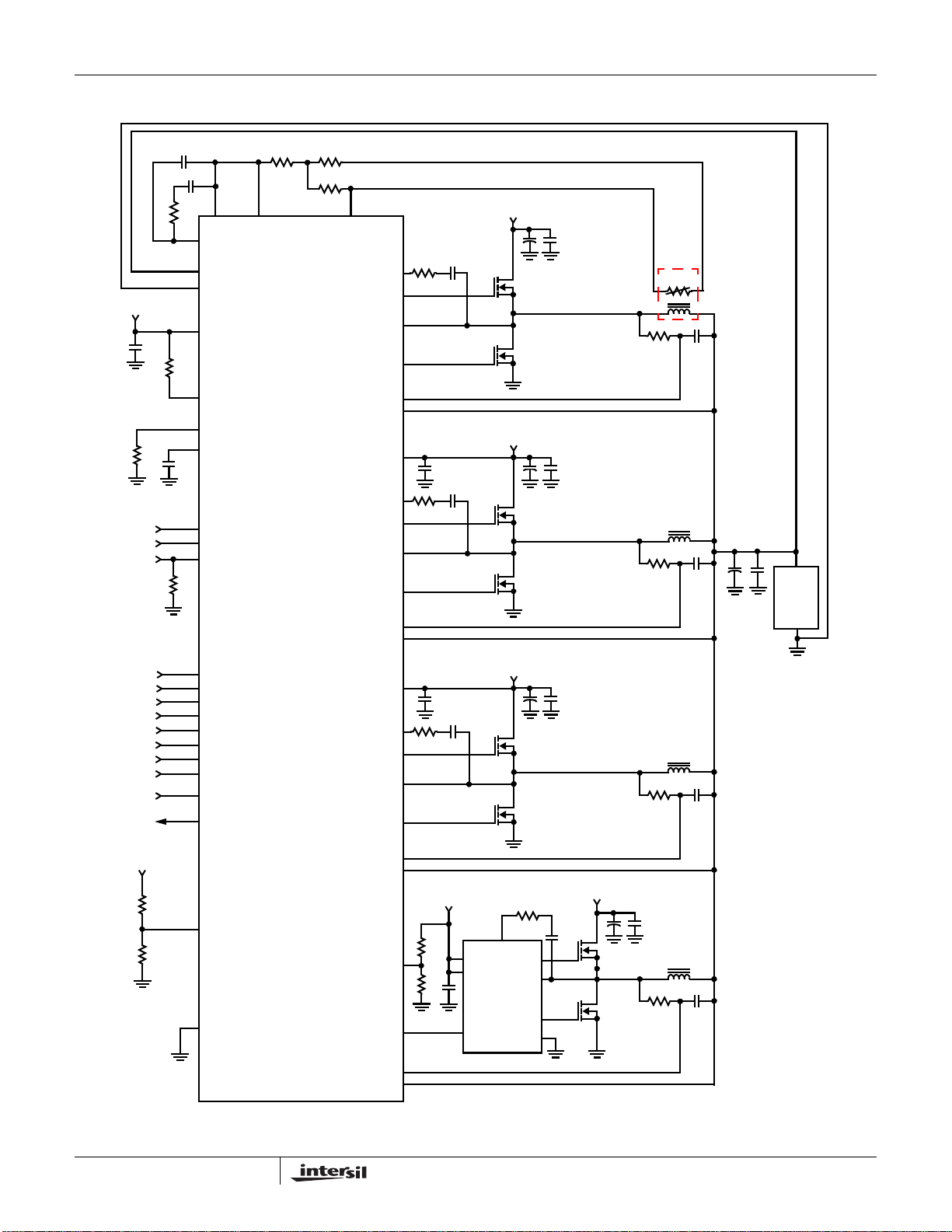
Typical Application - ISL6322 (4-Phase)
ISL6322ISL6322
+5V
IDROOP
FB
COMP
VSEN
RGND
VCC
OFS
FS
REF
SCL
SDA
SS / RST / A0
VDIFF
ISL6322
BOOT1
UGATE1
PHASE1
LGATE1
ISEN1ISEN1+
PVCC1_2
BOOT2
UGATE2
PHASE2
LGATE2
ISEN2-
ISEN2+
+12V
+12V
LOAD
+12V
VID7
VID6
VID5
VID4
VID3
VID2
VID1
VID0
VRSEL
PGOOD
EN
GND
PVCC3
BOOT3
UGATE3
PHASE3
LGATE3
ISEN3ISEN3+
EN_PH4
PWM4
ISEN4ISEN4+
+12V
VCC
PVCC
ISL6612
PWM
+12V
+12V
BOOT
UGATE
PHASE
LGATE
GND
5
FN6328.2
August 2, 2007
ISL6322ISL6322
Typical Application - ISL6322 with NTC Thermal Compensation (4-Phase)
+5V
IDROOP
FB
COMP
VSEN
RGND
VCC
OFS
FS
REF
SCL
SDA
SS / RST / A0
ISL6322
VDIFF
BOOT1
UGATE1
PHASE1
LGATE1
ISEN1-
ISEN1+
PVCC1_2
BOOT2
UGATE2
PHASE2
LGATE2
ISEN2ISEN2+
+12V
+12V
NTC
PLACE IN
CLOSE
PROXIMITY
LOAD
+12V
VID7
VID6
VID5
VID4
VID3
VID2
VID1
VID0
VRSEL
PGOOD
EN
GND
PVCC3
BOOT3
UGATE3
PHASE3
LGATE3
ISEN3-
ISEN3+
EN_PH4
PWM4
ISEN4ISEN4+
+12V
BOOT
VCC
PVCC
ISL6612
PWM
+12V
+12V
UGATE
PHASE
LGATE
GND
6
FN6328.2
August 2, 2007
ISL6322ISL6322
Absolute Maximum Ratings
Supply Voltage, VCC. . . . . . . . . . . . . . . . . . . . . . . . . . .-0.3V to +6V
Supply Voltage, PVCC. . . . . . . . . . . . . . . . . . . . . . . . .-0.3V to +15V
BOOT Voltage, V
BOOT to PHASE Voltage, V
PHASE Voltage, V
GND - 8V (<400ns, 20µJ) to 24V (<200ns, V
UGATE Voltage, V
V
PHASE
LGATE Voltage, V
GND - 5V (<100ns Pulse Width, 2µJ) to PVCC + 0.3V
Input, Output, or I/O Voltage . . . . . . . . . GND - 0.3V to VCC + 0.3V
ESD Classification . . . . . . . . . . . . . . . . . . . . . . . Class I JEDEC STD
CAUTION: Do not operate at or near the maximum ratings listed for extended periods of time. Exposure to such conditions may adversely impact product reliability and
result in failures not covered by warranty.
. . . . . . . . . . . . . .GND - 0.3V to GND + 36V
BOOT
BOOT - PHASE
. . . . . . . GND - 0.3V to 15V (PVCC = 12)
PHASE
. . . . . . . .V
UGATE
- 3.5V (<100ns Pulse Width, 2µJ) to V
. . . . . . . . . . . GND - 0.3V to PVCC + 0.3V
LGATE
. . . . . -0.3V to 15V (DC)
-0.3V to 16V (<10ns, 10µJ)
BOOT - PHASE
- 0.3V to V
PHASE
BOOT
BOOT
= 12V)
+ 0.3V
+ 0.3V
Thermal Information
Thermal Resistance θJA (°C/W) θJC (°C/W)
QFN Package (Notes 1, 2). . . . . . . . . . 27 2.5
Maximum Junction Temperature . . . . . . . . . . . . . . . . . . . . . .+150°C
Maximum Storage Temperature Range. . . . . . . . . .-65°C to +150°C
Pb-free reflow profile . . . . . . . . . . . . . . . . . . . . . . . . . .see link below
http://www.intersil.com/pbfree/Pb-FreeReflow.asp
Recommended Operating Conditions
VCC Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .+5V ±5%
PVCC Supply Voltage . . . . . . . . . . . . . . . . . . . . . . .+5V to 12V ±5%
Ambient Temperature (ISL6322CRZ) . . . . . . . . . . . . . 0°C to +70°C
Ambient Temperature (ISL6322IRZ) . . . . . . . . . . . . .-40°C to +85°C
NOTES:
is measured in free air with the component mounted on a high effective thermal conductivity test board with “direct attach” features. See
1. θ
JA
Tech Brief TB379.
2. For θ
, the “case temp” location is the center of the exposed metal pad on the package underside.
JC
3. Limits established by characterization and are not production tested.
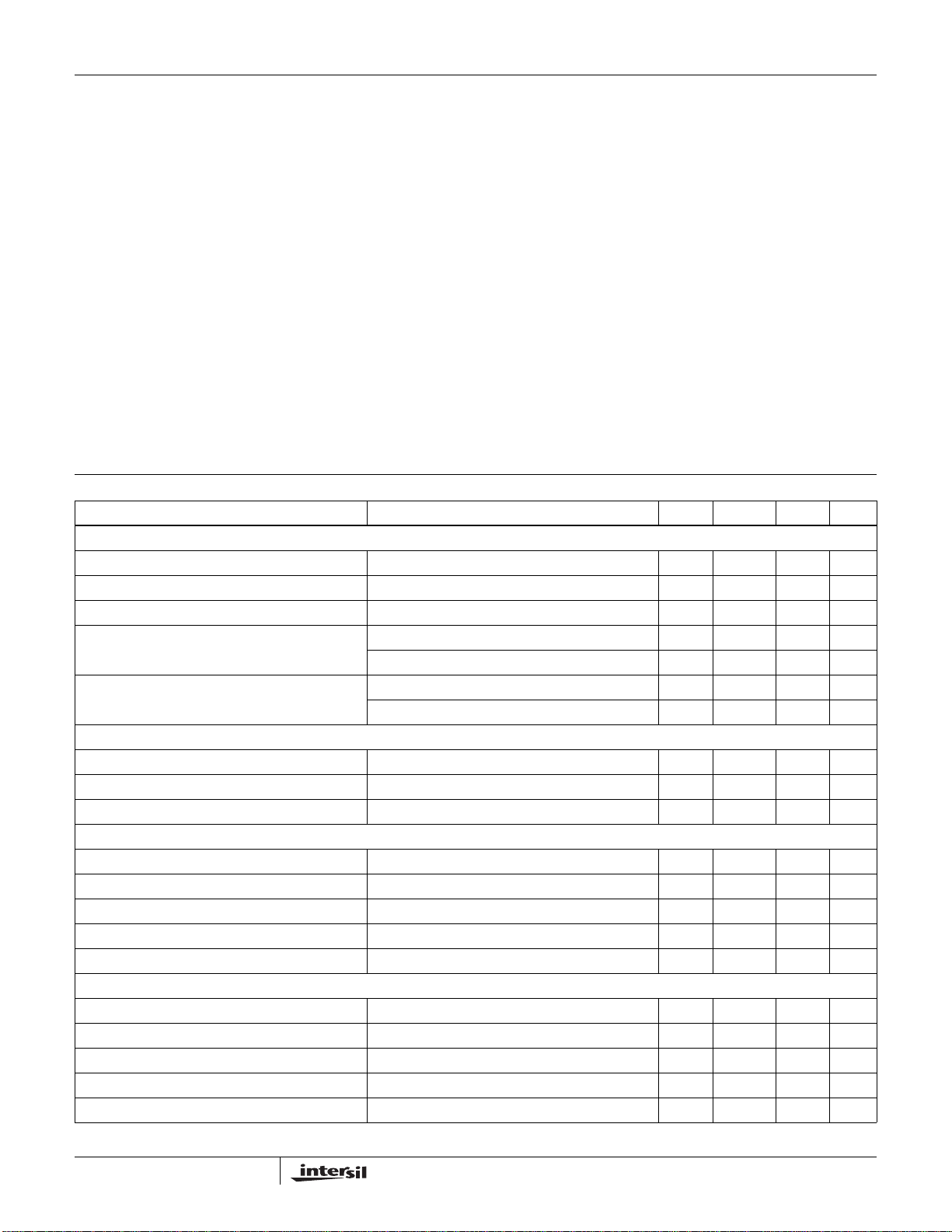
Electrical Specifications Recommended Operating Conditions, Unless Otherwise Specified.
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
BIAS SUPPLIES
Input Bias Supply Current I
Gate Drive Bias Current - PVCC1_2 Pin I
Gate Drive Bias Current - PVCC3 Pin I
VCC POR (Power-On Reset) Threshold VCC rising 4.25 4.38 4.50 V
PVCC POR (Power-On Reset) Threshold PVCC rising 4.25 4.38 4.50 V
PWM MODULATOR
Oscillator Frequency Accuracy, f
SW
Adjustment Range of Switching Frequency (Note 3) 0.08 1.0 MHz
Oscillator Ramp Amplitude, V
PP
CONTROL THRESHOLDS
EN Rising Threshold 0.85 V
EN Hysteresis 110 mV
EN_PH4 Rising Threshold 1.160 1.210 1.250 V
EN_PH4 Falling Threshold 1.00 1.06 1.10 V
COMP Shutdown Threshold COMP falling 0.1 0.2 0.3 V
REFERENCE AND DAC
System Accuracy (1.000V to 1.600V) -0.5 0.5 %
System Accuracy (0.600V to 1.000V) -1.0 1.0 %
System Accuracy (0.375V - 0.600V) -2.0 2.0 %
DAC Input Low Voltage (VR10, VR11) 0.4 V
DAC Input High Voltage (VR10, VR11) 0.8 V
; EN = high 15 20 25 mA
VCC
PVCC1_2
PVCC3
; EN = high 2 4.3 6 mA
; EN = high 1 2.1 3 mA
VCC falling 3.75 3.88 4.00 V
PVCC falling 3.60 3.88 4.00 V
RT = 100kΩ (±0.1%) 225 250 275 kHz
(Note 3) 1.50 V
7
FN6328.2
August 2, 2007
ISL6322ISL6322
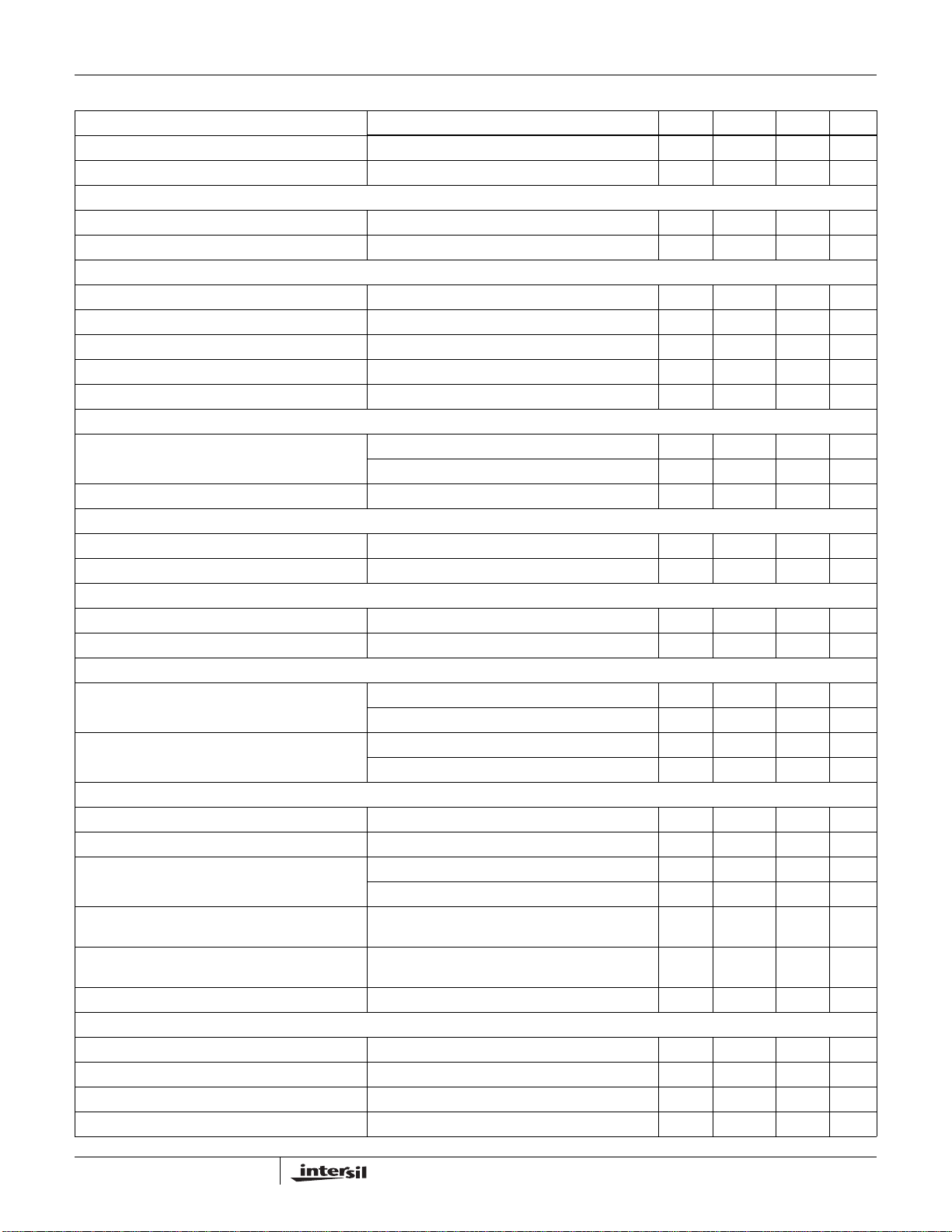
Electrical Specifications Recommended Operating Conditions, Unless Otherwise Specified. (Continued)
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
DAC Input Low Voltage (AMD) 0.6 V
DAC Input High Voltage (AMD) 1.0 V
PIN-ADJUSTABLE OFFSET
OFS Sink Current Accuracy (Negative Offset) R
OFS Source Current Accuracy (Positive Offset) R
ERROR AMPLIFIER
DC Gain R
Gain-Bandwidth Product C
Slew Rate CL = 100pF, Load = ±400μA, (Note 3) 8 V/μs
Maximum Output Voltage Load = 1mA 3.90 4.20 V
Minimum Output Voltage Load = -1mA 1.30 1.5 V
SOFT-START RAMP
Soft-Start Ramp Rate VR10/VR11, R
Adjustment Range of Soft-Start Ramp Rate (Note 3) 0.625 6.25 mV/µs
PWM OUTPUT
PWM Output Voltage LOW Threshold Iload = ±500μA0.5V
PWM Output Voltage HIGH Threshold Iload = ±500μA4.5V
CURRENT SENSING
Current Sense Resistance, R
ISEN
Sensed Current Tolerance ISEN1+ = ISEN2+ = ISEN3+ = ISEN4+ = 80μA 768084μA
OVERCURRENT PROTECTION
Overcurrent Trip Level - Average Channel Normal operation 110 125 140 μA
Overcurrent Trip Level - Individual Channel Normal operation 150 177 204 μA
PROTECTION
Undervoltage Threshold VSEN falling 55 60 65 %VID
Undervoltage Hysteresis VSEN rising 10 %VID
Overvoltage Threshold During Soft-Start VR10/VR11 1.24 1.28 1.32 V
Overvoltage Threshold (Default) VSEN rising VDAC +
Overvoltage Threshold (Alternate) VSEN rising VDAC +
Overvoltage Hysteresis VSEN falling 100 mV
SWITCHING TIME (Note 3)
UGATE Rise Time t
LGATE Rise Time t
UGATE Fall Time t
LGATE Fall Time t
= 10kΩ from OFS to GND 37.0 40.0 43.0 μA
OFS
= 30kΩ from OFS to VCC 50.5 53.5 56.5 μA
OFS
= 10k to ground, (Note 3) 96 dB
L
= 100pF, RL = 10k to ground, (Note 3) 20 MHz
L
= 100kΩ 1.563 mV/µs
S
AMD 2.063 mV/µs
T = +25°C 297 300 303 Ω
Dynamic VID change 143 163 183 μA
Dynamic VID change (Note 3) 209.4 238 266.6 μA
AMD 2.13 2.20 2.27 V
RUGATE; VPVCC
RLGATE; VPVCC
FUGATE; VPVCC
FLGATE; VPVCC
VDAC +
225mV
250mV
VDAC +
150mV
175mV
= 12V, 3nF load, 10% to 90% 26 ns
= 12V, 3nF load, 10% to 90% 18 ns
= 12V, 3nF load, 90% to 10% 18 ns
= 12V, 3nF load, 90% to 10% 12 ns
VDAC +
275mV
VDAC +
200mV
V
V
8
FN6328.2
August 2, 2007
ISL6322ISL6322
Electrical Specifications Recommended Operating Conditions, Unless Otherwise Specified. (Continued)
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
UGATE Turn-On Non-Overlap t
LGATE Turn-On Non-Overlap t
PDHUGATE
PDHLGATE
GATE DRIVE RESISTANCE (Note 3)
Upper Drive Source Resistance V
Upper Drive Sink Resistance V
Lower Drive Source Resistance V
Lower Drive Sink Resistance V
PVCC
PVCC
PVCC
PVCC
OVER TEMPERATURE SHUTDOWN (Note 3)
Thermal Shutdown Setpoint - 160 - °C
Thermal Recovery Setpoint - 100 - °C
; V
; V
= 12V, 3nF load, adaptive 10 ns
PVCC
= 12V, 3nF load, adaptive 10 ns
PVCC
= 12V, 15mA source current 1.25 2.0 3.0 Ω
= 12V, 15mA sink current 0.9 1.65 3.0 Ω
= 12V, 15mA source current 0.85 1.25 2.2 Ω
= 12V, 15mA sink current 0.60 0.80 1.35 Ω
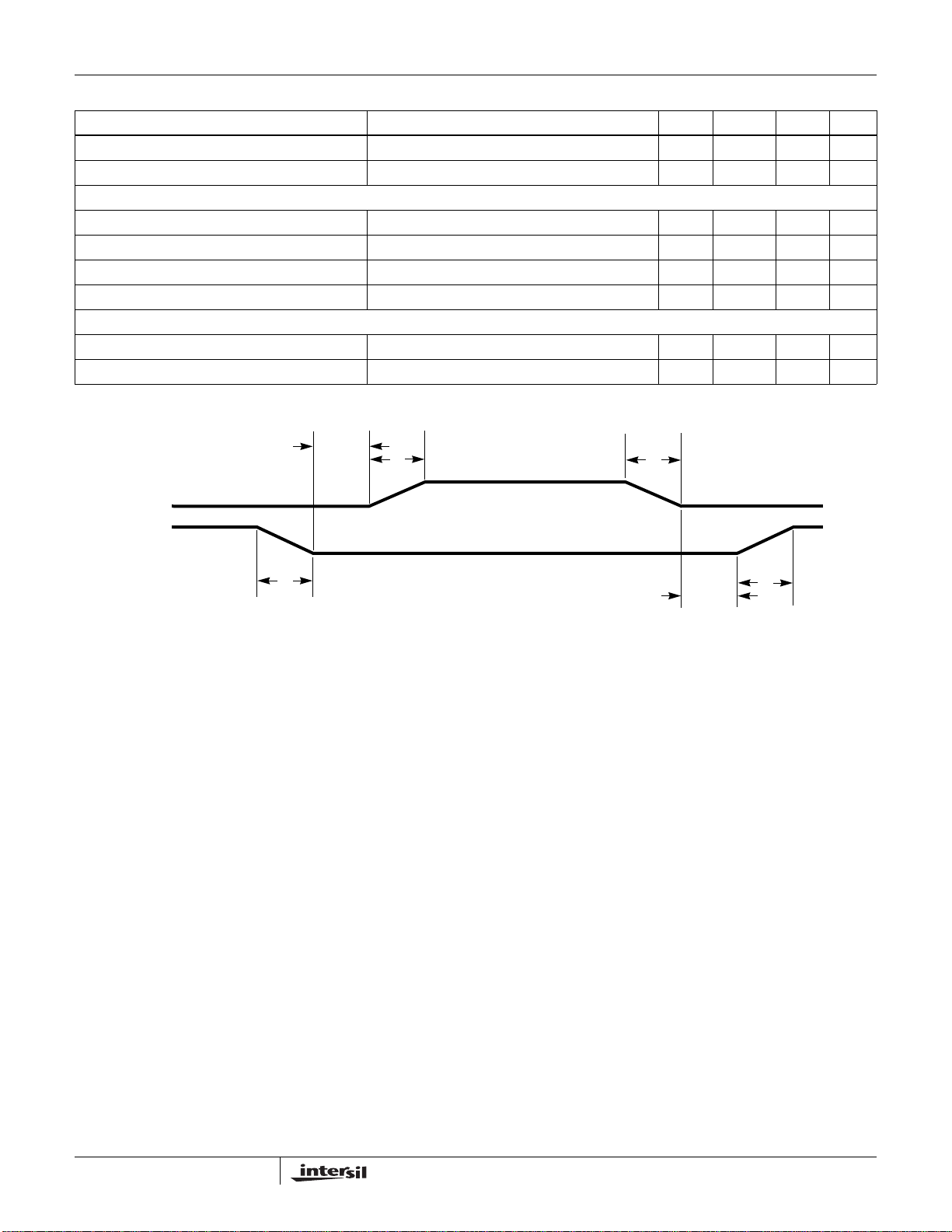
Timing Diagram
t
PDHUGATE
UGATE
LGATE
t
RUGATE
t
FUGATE
t
FLGATE
t
PDHLGATE
t
RLGATE
9
FN6328.2
August 2, 2007
ISL6322ISL6322
Functional Pin Description
VCC
VCC is the bias supply for the ICs small-signal circuitry.
Connect this pin to a +5V supply and decouple using a
quality 0.1μF ceramic capacitor.
PVCC1_2 and PVCC3
These pins are the power supply pins for the corresponding
channel MOSFET drive, and can be connected to any
voltage from +5V to +12V depending on the desired
MOSFET gate-drive level. Decouple these pins with a quality
1.0μF ceramic capacitor .
Leaving PVCC3 unconnected or grounded programs the
controller for 2-phase operation.
GND
GND is the bias and reference ground for the IC.
EN
This pin is a threshold-sensitive (approxima tely 0.85V) enable
input for the controller. Held low, this pin disables controller
operation. Pulled high, the pin enables the controller for
operation.
FS
A resistor, placed from FS to ground, sets the switching
frequency of the controller.
VID0, VID1, VID2, VID3, VID4, VID5, VID6, and VID7
These are the inputs for the internal DAC that provides the
reference voltage for output regulation. These pins respond to
TTL logic thresholds. These pins are internally pulled high, to
approximately 1.2V, by 40μA internal current sources for Intel
modes of operation, and pulled low by 20μA internal current
sources for AMD modes of operation. The internal pull-up
current decreases to 0 as the VID voltage approaches the
internal pull-up voltage. All VID pins are compat ible with
external pull-up voltages not exceeding the IC’s bias voltage
(VCC).
VRSEL
The state of this pin selects which of the available DAC tables
will be used to decode the VID inputs and puts the controller
into the corresponding mode of operation. For VR10 mode of
operation VRSEL should be less then 0.6V. The VR11 mode of
operation can be selected by setting VRSEL between 0.6V and
3.0V , and AMD compliance is selected if this pin is between
3.0V and VCC.
VSEN and RGND
VSEN and RGND are inputs to the precision differe ntial
remote-sense amplifier and should be connected to the sense
pins of the remote load.
VDIFF
VDIFF is the output of the differential remote-sense amplifier .
The voltage on this pin is equal to the difference between
VSEN and RGND.
FB and COMP
These pins are the internal error amplifier inverting input and
output respectively. FB, VDIFF, and COMP are tied together
through external R-C networks to compensate the regulator.
IDROOP
The IDROOP pin is the average channel-current sense
output. Connecting this pin through a tuned parallel R-C
network to FB allows the converter to incorporate output
voltage droop proportional to the output current. If voltage
droop is not desired leave this pin unconnected.
REF
The REF input pin is the positive input of the error amplifier. It
is internally connected to the DAC output through a 1kΩ
resistor. A cap acitor is used between the REF pin and gro und
to smooth the voltage transition during Dynamic VID
operations.
OFS
The OFS pin provides a means to program a DC current for
generating an offset voltage across the re sistor betwe en FB
and VDIFF. The offset current is generated via an external
resistor and precision internal voltage references. The polarity
of the offset is selected by connecting the resistor to GND or
VCC. For no offset, the OFS pin should be left unconnected.
ISEN1-, ISEN1+, ISEN2-, ISEN2+, ISEN3-, ISEN3+,
ISEN4-, and ISEN4+
These pins are used for differentially sensing the
corresponding channel output currents. The sensed currents
are used for channel balancing, protection, and load line
regulation.
Connect ISEN1-, ISEN2-, ISEN3-, and ISEN4- to the node
between the RC sense elements surrounding the inductor of
their respective channel. Tie the ISEN+ pins to the VCORE
side of their corresponding channel’s sense capacitor.
UGATE1, UGATE2, and UGATE3
Connect these pins to the corresponding upper MOSFET
gates. These pins are used to control the upper MOSFETs
and are monitored for shoot-through prevention purposes.
BOOT1, BOOT2, and BOOT3
These pins provide the bias voltage for the corresponding
upper MOSFET drives. Connect these pins to
appropriately-chosen external bootstrap capacitors. Internal
bootstrap diodes connected to the PVCC pins provide the
necessary bootstrap charge.
PHASE1, PHASE2, and PHASE3
Connect these pins to the sources of the corresponding
10
upper MOSFETs. These pins are the return path for the
upper MOSFET drives.
FN6328.2
August 2, 2007
ISL6322ISL6322
LGATE1, LGATE2, and LGATE3
These pins are used to control the lower MOSFET s. Connect
these pins to the corresponding lower MOSFETs’ gates.
PWM4
Pulse-width modulation output. Connect this pin to the PWM
input pin of an Intersil driver IC if 4-phase operation is
desired.
EN_PH4
This pin has two functions. First, a resistor divider connected
to this pin will provide a POR power-up synch between the
on-chip and external driver. The resistor divider should be
designed so that when the POR-trip point of the external
driver is reached the voltage on this pin should be 1.21V.
The second function of this pin is disabling PWM4 for
3-phase operation. This can be accomplished by connecting
this pin to a +5V supply.
SS/RST/A0
This pin has three different functions associated with it. The
first is that a resistor (R
), placed from this pin to ground, or
SS
VCC, will set the soft-start ramp slope for the Intel DAC
modes of operation. Refer to Equations 18 and 19 for proper
resistor calculation.
The second function of this pin is that it selects which of the
two 8-bit Slave I
2
C addresses the controller will use.
Connecting the RSS resistor on this pin to ground will
choose slave address one(1000_110x), while connecting
this resistor to VCC will select slave address
two(1000_111x).
2
The third function of this pin is a reset to the I
C registers.
During normal operation of the part, if this pin is ever
grounded, all of the I2C registers are reset to 0000_0000. An
open drain device is recommended as the means of
grounding this pin for resetting the I
2
C registers.
SCL
Connect this pin to the clock signal for the I2C bus, which is
a logic level input signal. The clock signal tells the controller
when data is available on the I
2
C bus.
SDA
Connect this pin to the bidirectional data line of the I2C bus,
which is a logic level input/output signal. All I
over this line, including the address of the device the bus is
trying to communicate with, and what functions the device
should perform.
2
C data is sent
PGOOD
During normal operation PGOOD indicates whether the
output voltage is within specified overvolt age an d
undervoltage limits. If the output voltage exceed s these limit s
or a reset event occurs (such as an overcurrent event),
PGOOD is pulled low. PGOOD is always low prior to the end
of soft-start.
Operation
Multiphase Power Conversion
Microprocessor load current profiles have changed to the
point that using single-phase regulators is no longer a viable
solution. Designing a regulator that is cost-effective,
thermally sound, and efficient has become a challenge that
only multiphase converters can accomplish. The ISL6322
controller helps simplify implementation by integrating vital
functions and requiring minimal external components. The
“Block Diagram” on page 3 provides a top level view of
multiphase power conversion using the ISL6322 controller.
IL1 + IL2 + IL3, 7A/DIV
IL3, 7A/DIV
PWM3, 5V/DIV
IL2, 7A/DIV
PWM2, 5V/DIV
IL1, 7A/DIV
PWM1, 5V/DIV
1μs/DIV
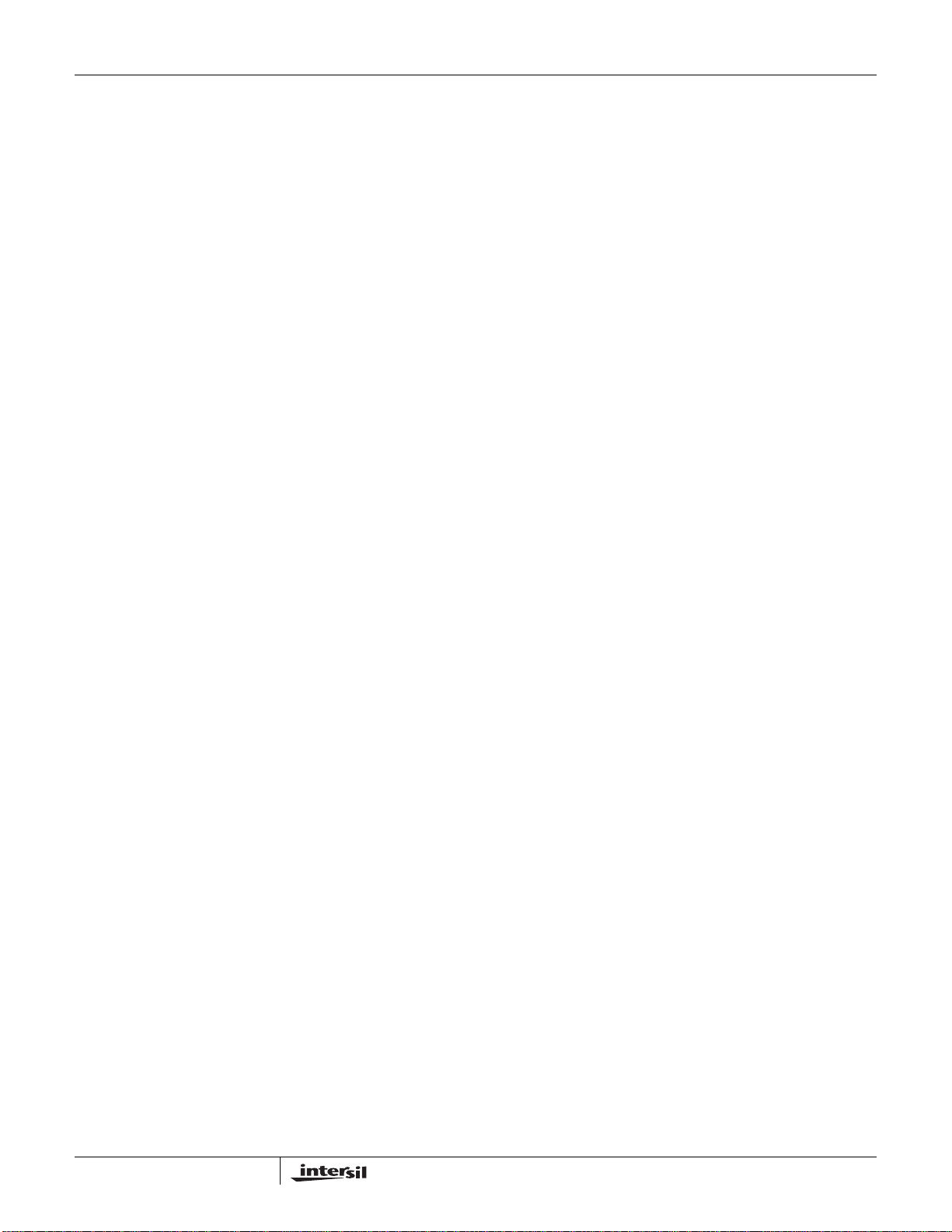
FIGURE 1. PWM AND INDUCTOR-CURRENT WAVEFORMS
FOR 3-PHASE CONVERTER
Interleaving
The switching of each channel in a multiphase converter is
timed to be symmetrically out of phase with each of the other
channels. In a 3-phase converter, each channel switches 1/3
cycle after the previous channel and 1/3 cycle before the
following channel. As a result, the three-phase converter has
a combined ripple frequency three times greater than the
ripple frequency of any one phase. In addition, the
peak-to-peak amplitude of the combined inductor currents is
reduced in proportion to the number of phases (Equations 1
and 2). Increased ripple frequency and lower ripple
amplitude mean that the designer can use less per-channel
inductance and lower total output capacitance for any
performance specification.
Figure 1 illustrates the multiplicative effect on output ripple
frequency. The three channel currents (IL1, IL2, and IL3)
combine to form the AC ripple current and the DC load
current. The ripple component has three times the ripple
frequency of each individual channel current. Each PWM
pulse is terminated 1/3 of a cycle after the PWM pulse of the
previous phase. The peak-to-peak current for each phase is
about 7A, and the DC components of the inductor currents
combine to feed the load.
11
FN6328.2
August 2, 2007
ISL6322ISL6322
T o understand the reduction of ripple current amplitude in the
multiphase circuit, examine the equation representing an
individual channel peak-to-peak inductor current.
VINV
----------------------------------------------------------=
–()V
Lf
I
PP
In Equation 1, V
OUT
S
V⋅IN⋅
and V
IN
⋅
OUT
are the input and output
OUT
(EQ. 1)
voltages respectively, L is the single-channel inductor value,
and fS is the switching frequency.
The output capacitors conduct the ripple component of the
inductor current. In the case of multiphase converters, the
capacitor current is the sum of the ripple currents from each
of the individual channels. Compare Equation 1 to the
expression for the peak-to-peak current after the summation
of N symmetrically phase-shifted inductor currents in
Equation 2. Peak-to-peak ripple current decreases by an
amount proportional to the number of channels. Output
voltage ripple is a function of capacitance, capacitor
equivalent series resistance (ESR), and inductor ripple
current. Reducing the inductor ripple current allows the
designer to use fewer or less costly output capacitors.
VINNV
I
CP P–()
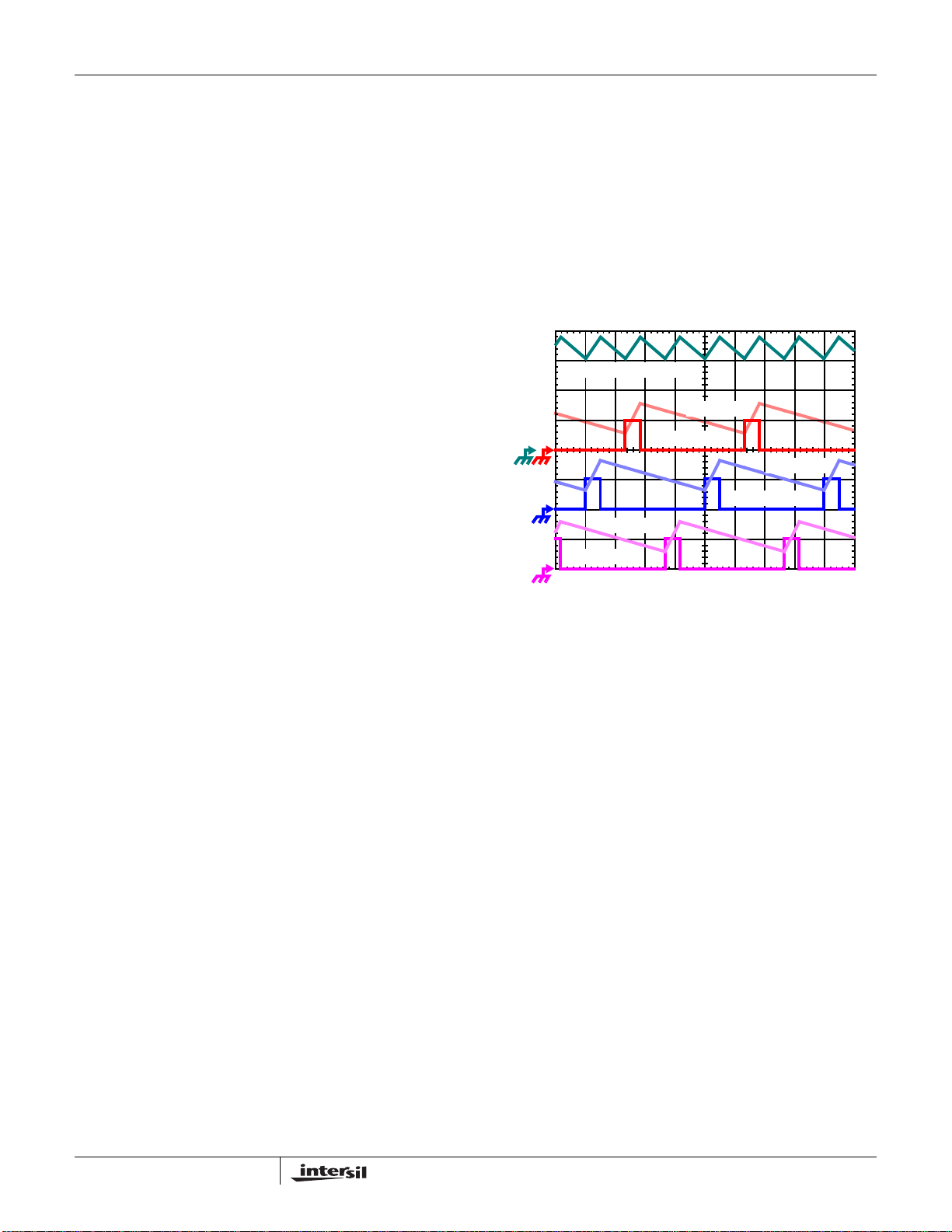
FIGURE 2. CHANNEL INPUT CURRENTS AND
------------------------------------------------------------------- -=
INPUT-CAPACITOR CURRENT, 10A/DIV
⋅–()V
Lf
CHANNEL 1
INPUT CURRENT
10A/DIV
INPUT-CAPACITOR RMS CURRENT FOR
3-PHASE CONVERTER
⋅
OUT
S
CHANNEL 2
INPUT CURRENT
10A/DIV
OUT
V⋅IN⋅
CHANNEL 3
INPUT CURRENT
10A/DIV
1μs/DIV
(EQ. 2)
Another benefit of interleaving is to reduce input ripple
current. Input capacitance is determined in part by the
maximum input ripple current. Multiphase topologies can
improve overall system cost and size by lowering input ripple
current and allowing the designer to reduce the cost of input
capacitance. The example in Figure 2 illustrates input
currents from a three-phase converter combining to reduce
the total input ripple current.
must use an input capacitor bank with twice the RMS current
capacity as the equivalent three-phase converter .
Active Pulse Positioning (APP) Modulated PWM
Operation
The ISL6322 uses a proprietary Active Pulse Positioning
(APP) modulation scheme to control the internal PWM
signals that command each channel’s driver to turn their
upper and lower MOSFETs on and off. The time interval in
which a PWM signal can occur is generated by an internal
clock, whose cycle time is the inverse of the switching
frequency set by the resistor between the FS pin and
ground. The advantage of Intersil’s proprietary Active Pulse
Positioning (APP) modulator is that the PWM signal has the
ability to turn on at any point during this PWM time interval,
and turn off immediately after the PWM signal has
transitioned high. This is important because is allows the
controller to quickly respond to output voltage drops
associated with current load spikes, while avoiding the ring
back affects associated with other modulation schemes.
The PWM output state is driven by the position of the error
amplifier output signal, V
signal relative to the proprietary modulator ramp waveform
as illustrated in Figure 3. At the beginning of each PWM time
interval, this modified V
internal modulator waveform. As long as the modified
V
voltage is lower then the modulator waveform
COMP
voltage, the PWM signal is commanded low. The internal
MOSFET driver detects the low state of the PWM signal and
turns off the upper MOSFET and turns on the lower
synchronous MOSFET. When the modified V
crosses the modulator ramp, the PWM output transitions
high, turning off the synchronous MOSFET and turning on
the upper MOSFET. The PWM signal will remain high until
the modified V
voltage crosses the modulator ramp
COMP
again. When this occurs the PWM signal will transition low
again.
During each PWM time interval the PWM signal can only
transition high once. Once PWM transitions high it can not
transition high again until the beginning of the next PWM
time interval. This prevents the occurrence of double PWM
pulses occurring during a single period.
To further improve the transient response, ISL6322 also
implements Intersil’s proprietary Adaptive Phase Alignment
(APA) technique, which turns on all phases together under
transient events with large step current. With both APP and
APA control, ISL6322 can achieve excellent transient
performance and reduce the deman d on the output
capacitors.
, minus the current correction
COMP
signal is compared to the
COMP
COMP
voltage
The converter depicted in Figure 2 delivers 1.5V to a 36A load
from a 12V input. The RMS input capacitor current is 5.9A.
Compare this to a single-phase converter also stepping down
12V to 1.5V at 36A. The single-phase converter has 11.9A
RMS input capacitor current. The single-phase converter
12
Channel-Current Balance
One important benefit of multiphase operation is the thermal
advantage gained by distributing the dissipated heat over
multiple devices and greater area. By doing this the designer
avoids the complexity of driving parallel MOSFETs and the
FN6328.2
August 2, 2007
expense of using expensive heat sinks and exotic magnetic
materials.
In order to realize the thermal advantage, it is important that
each channel in a multiphase converter be controlled to
carry equal amounts of current at any load level. To achieve
this, the currents through each channel must be sampled
every switching cycle. The sampled currents, I
, from each
n
active channel are summed together and divided by the
number of active channels. The resulting cycle average
current, I
, provides a measure of the total load-current
AVG
demand on the converter during each switching cycle.
Channel-current balance is achieved by comparing the
sampled current of each channel to the cycle average
current, and making the proper adjustment to each channel
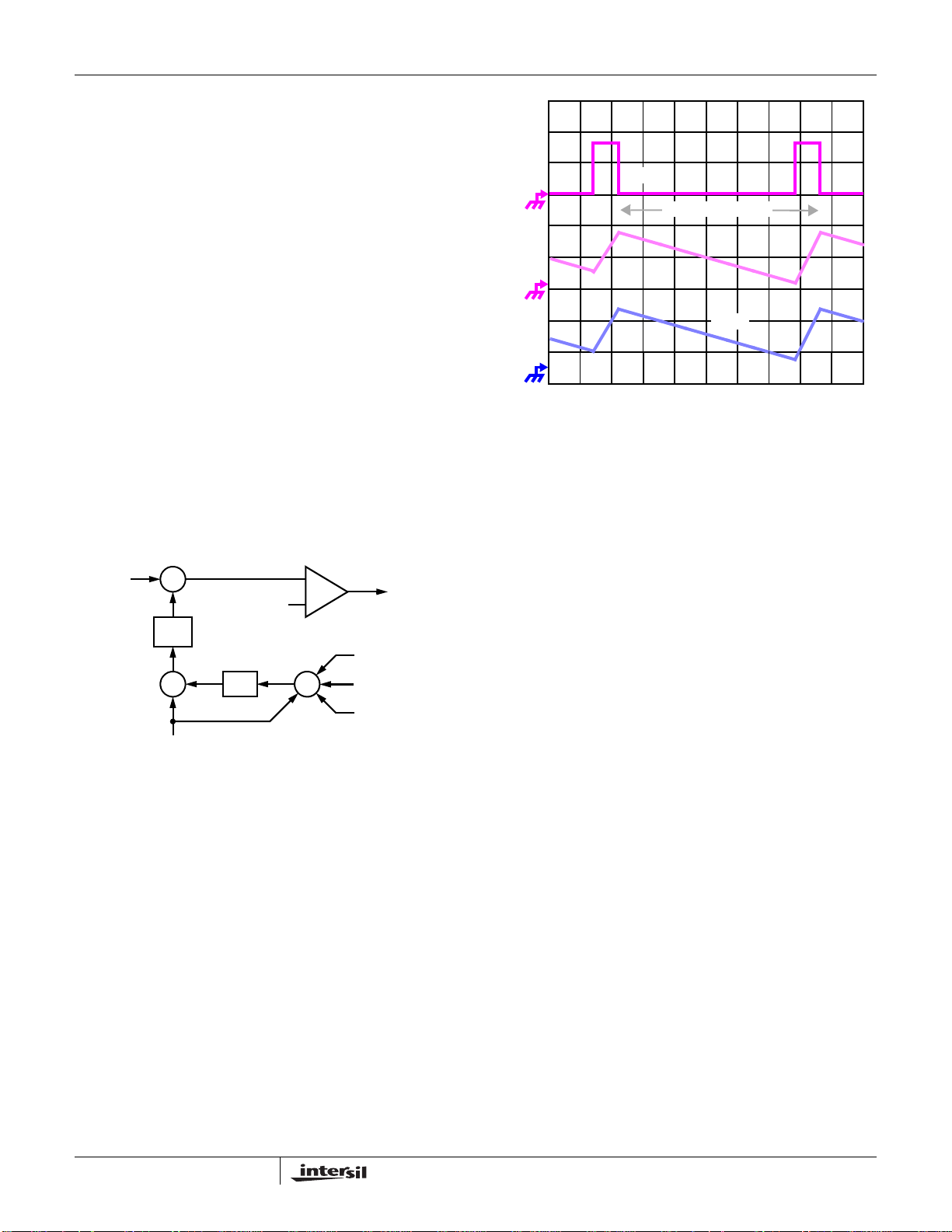
pulse width based on the error. Intersil’s patented currentbalance method is illustrated in Figure 3, with error
correction for Channel 1 represented. In the figure, the cycle
average current, I
sample, I
, to create an error signal IER.
1
, is compared with the Channel 1
AVG
The filtered error signal modifies the pulse width
commanded by V
I
toward zero. The same method for error signal
ER
to correct any unbalance and force
COMP
correction is applied to each active channel.
V
COMP
FILTER
+
I
AVG
-
MODULATOR
RAMP
WAVEFORM
÷ N
-
f(s)
I
ER
+
PWM1
+
-
Σ
I
4
I
3
I
2
TO GATE
CONTROL
LOGIC
ISL6322
PWM
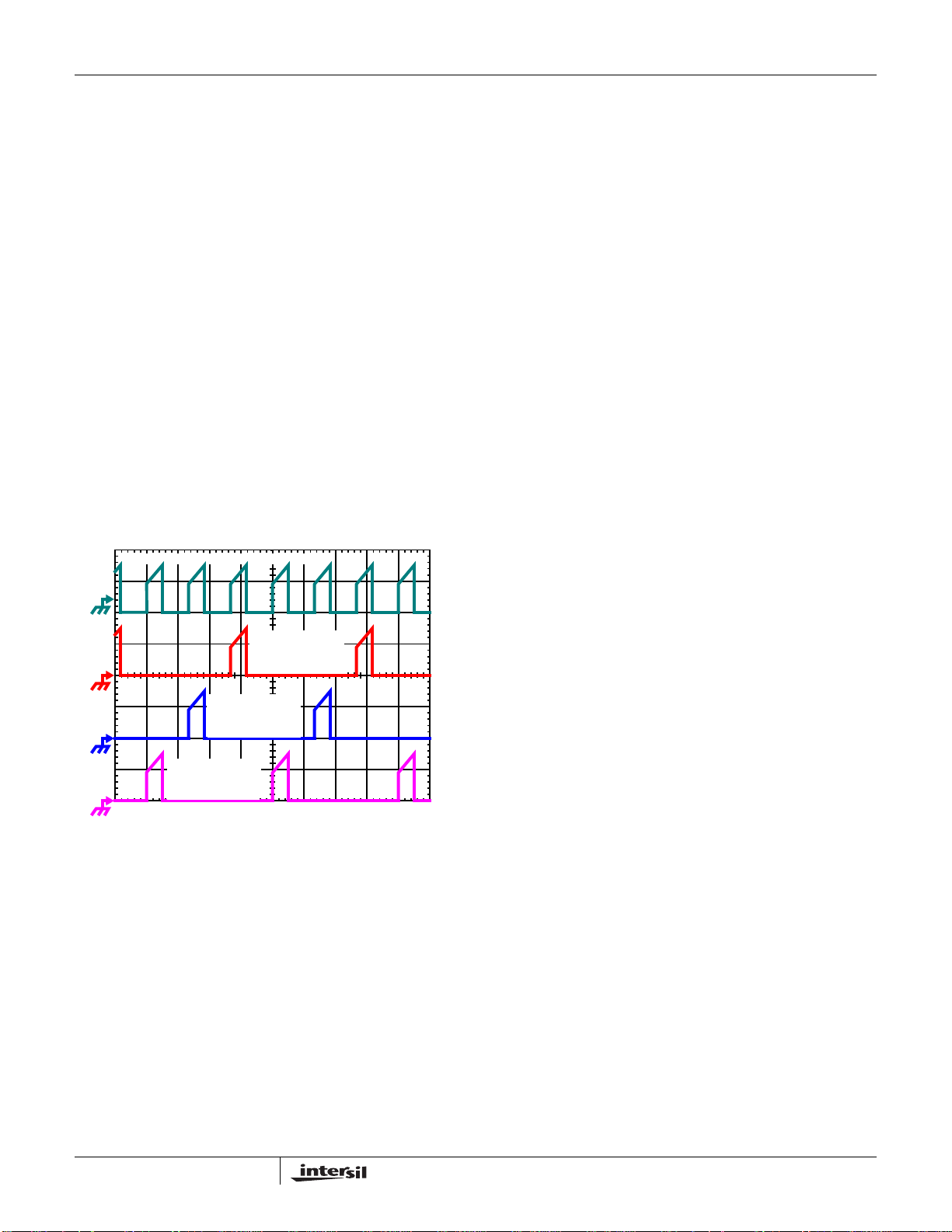
SWITCHING PERIOD
I
L
I
SEN
TIME
FIGURE 4. CONTINUOUS CURRENT SAMPLING
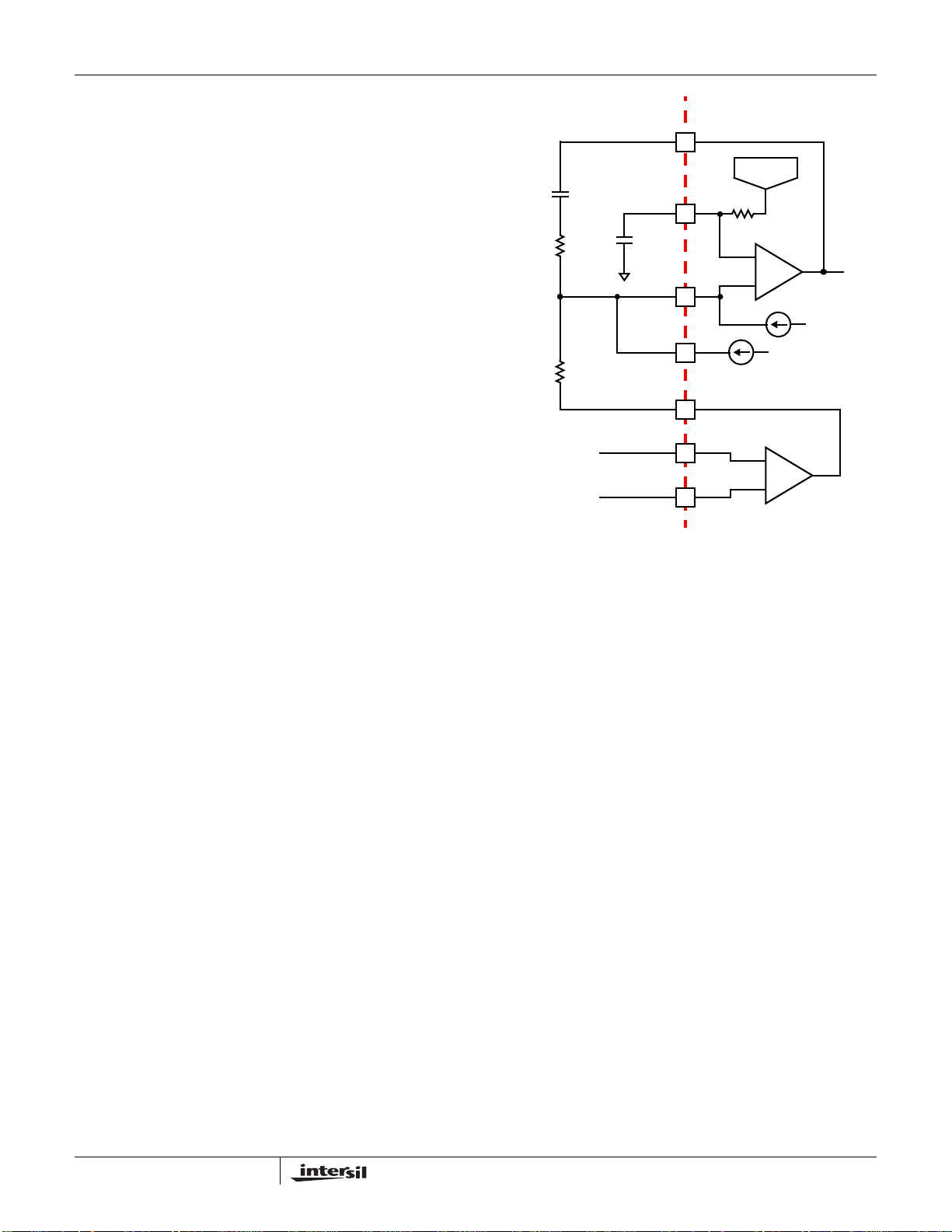
The ISL6322 supports inductor DCR current sensing to
continuously sense each channel’s current for
channel-current balance. The internal circuitry, shown in
Figure 5 represents Channel N of an N-Channel converter.
This circuitry is repeated for each channel in the converter,
but may not be active depending on how many channels are
operating.
Inductor windings have a characteristic distributed
resistance or DCR (Direct Current Resistance). For
simplicity, the inductor DCR is considered as a separate
lumped quantity, as shown in Figure 5. The channel current
I
, flowing through the inductor, passes through the DCR.
L
Equation 3 shows the s-domain equivalent voltage, V
,
L
across the inductor.
I
1
Note: Channel 3 and 4 are optional
FIGURE 3. CHANNEL-1 PWM FUNCTION AND
CURRENT-BALANCE ADJUSTMENT
Continuous Current Sampling
In order to realize proper current-balance, the currents in
each channel are sensed continuously every switching
cycle. During this time the current-sense amplifier uses the
ISEN inputs to reproduce a signal proportional to the
inductor current, I
scaled version of the inductor current.
. This sensed current, I
L
13
, is simply a
SEN
and C)
1
(EQ. 3)
VLs() ILsL DCR+⋅()⋅=
A simple R-C network across the inductor (R
extracts the DCR voltage, as shown in Figure 5. The voltage
across the sense capacitor, V
proportional to the channel current I
sL⋅
⎛⎞
-------------
⎝⎠
s()
C
--------------------------------------
sR
V
1+
DCR
C⋅⋅ 1+()
1
, can be shown to be
C
L
⋅⋅=
DCR I
L
, shown in Equation 4.
(EQ. 4)
In some cases it may be necessary to use a resistor divider
R-C network to sense the current through the inductor. This
can be accomplished by placing a second resistor, R
,
2
across the sense capacitor. In these cases the voltage
across the sense capacitor , V
channel current I
, and the resistor divider ratio, K.
L
, becomes proportional to the
C
FN6328.2
August 2, 2007

L
⎛⎞
ISL6322
⋅
s
-------------
1+
DCR
⋅()
1R2
+
1R2
C⋅⋅1+
⋅⋅⋅=
KDCRI
L
(EQ. 5)
(EQ. 6)
VCs()
---------------------
K
=
R2R1+
⎝⎠
--------------------------------------------------------
R
⎛⎞
------------------------
s
⎜⎟
R
⎝⎠
R
2
If the R-C network components are selected such that the
RC time constant matches the inductor L/DCR time
constant, then V
is equal to the voltage drop across the
C
DCR multiplied by the ratio of the resistor divider, K. If a
resistor divider is not being used, the value for K is 1.
V
UGATE(n)
MOSFET
DRIVER
ISL6322 INTERNAL CIRCUIT
SAMPLE
In
LGATE(n)
+
-
I
SEN
IN
+
VC(s)
R
ISEN
I
L
INDUCTOR
VL(s)
+
R
1
ISEN-(n)
-
ISEN+(n)
L
DCR
-
-
VC(s)
+
C
R
2*
*R2 is OPTIONAL
V
OUT
C
OUT
FIGURE 5. INDUCTOR DCR CURRENT SENSING
CONFIGURATION
The capacitor voltage V
sense resistor R
ISEN
, is then replicated across the
C
. The current through R
ISEN
is
proportional to the inductor current. Equation 7 shows that
the proportion between the channel current and the sensed
current (I
) is driven by the value of the sense resistor,
SEN
the resistor divider ratio, and the DCR of the inductor.
DCR
KI
⋅⋅=
L
----------------- -
R
ISEN
(EQ. 7)
I
SEN
Output Voltage Setting
The ISL6322 uses a digital to analog converter (DAC) to
generate a reference voltage based on the logic signals at
the VID pins. The DAC decodes the logic signals into one of
the discrete voltages shown in Tables 2, 3, 4 and 5. In Intel
modes of operation, each VID pin is pulled up to an internal
1.2V voltage by a weak current source (40μA), which
14
decreases to 0A as the voltage at the VID pin varies from 0
to the internal 1.2V pull-up voltage. In AMD modes of
operation the VID pins are pulled low by a weak 20μA
current source. External pull-up resistors or active-high
output stages can augment the pull-up current sources, up to
a voltage of 5V.
The ISL6322 accommodates four different DAC ranges: Intel
VR10 (Extended), Intel VR11, AMD K8/K9 5-bit, and AMD
6-bit. The state of the VRSEL and VID7 pins decide which
DAC version is active. Refer to Table 1 for a description of
how to select the desired DAC version.
TABLE 1. ISL6322 DAC SELECT TABLE
DAC VERSION VRSEL PIN VID7 PIN
VR10(Extended) VRSEL < 0.6V -
VR11 0.8V < VRSEL < 3.0V AMD 5-Bit 3.0V < VRSEL < VCC low
AMD 6-Bit 3.0V < VRSEL < VCC high
TABLE 2. VR10 (EXTENDED) VOL T AG E IDENTIFICA TION
VID4 VID3 VID2 VID1 VID0 VID5 VID6 VDAC
01010111.60000
01010101.59375
01011011.58750
01011001.58125
01011111.57500
01011101.56875
01100011.56250
01100001.55625
01100111.55000
01100101.54375
01101011.53750
01101001.53125
01101111.52500
01101101.51875
01110011.51250
01110001.50625
01110111.50000
01110101.49375
01111011.48750
01111001.48125
01111111.47500
01111101.46875
10000011.46250
10000001.45625
CODES
FN6328.2
August 2, 2007

ISL6322
TABLE 2. VR10 (EXTENDED) VOL T AGE IDENTIFICATION
CODES (Continued)
VID4 VID3 VID2 VID1 VID0 VID5 VID6 VDAC
10000111.45000
10000101.44375
10001011.43750
10001001.43125
10001111.42500
10001101.41875
10010011.41250
10010001.40625
10010111.40000
10010101.39375
10011011.38750
10011001.38125
10011111.37500
10011101.36875
10100011.36250
10100001.35625
10100111.35000
10100101.34375
10101011.33750
10101001.33125
10101111.32500
10101101.31875
10110011.31250
10110001.30625
10110111.30000
10110101.29375
10111011.28750
10111001.28125
10111111.27500
10111101.26875
11000011.26250
11000001.25625
11000111.25000
11000101.24375
11001011.23750
11001001.23125
11001111.22500
11001101.21875
11010011.21250
TABLE 2. VR10 (EXTENDED) VOL TAGE IDENTIFICA TION
CODES (Continued)
VID4 VID3 VID2 VID1 VID0 VID5 VID6 VDAC
11010001.20625
11010111.20000
11010101.19375
11011011.18750
11011001.18125
11011111.17500
11011101.16875
11100011.16250
11100001.15625
11100111.15000
11100101.14375
11101011.13750
11101001.13125
11101111.12500
11101101.11875
11110011.11250
11110001.10625
11110111.10000
11110101.09375
1111101OFF
1111100OFF
1111111OFF
1111110OFF
00000011.08750
00000001.08125
00000111.07500
00000101.06875
00001011.06250
00001001.05625
00001111.05000
00001101.04375
00010011.03750
00010001.03125
00010111.02500
00010101.01875
00011011.01250
00011001.00625
00011111.00000
00011100.99375
15
FN6328.2
August 2, 2007
ISL6322
TABLE 2. VR10 (EXTENDED) VOL T AGE IDENTIFICATION
CODES (Continued)
VID4 VID3 VID2 VID1 VID0 VID5 VID6 VDAC
00100010.98750
00100000.98125
00100110.97500
00100100.96875
00101010.96250
00101000.95625
00101110.95000
00101100.94375
00110010.93750
00110000.93125
00110110.92500
00110100.91875
00111010.91250
00111000.90625
00111110.90000
00111100.89375
01000010.88750
01000000.88125
01000110.87500
01000100.86875
01001010.86250
01001000.85625
01001110.85000
01001100.84375
01010010.83750
01010000.83125
TABLE 3. VR11 VOLTAGE IDENTIFICATION CODES
VID7 VID6 VID5 VID4 VID3 VID2 VID1 VID0 VDAC
00000000OFF
00000001OFF
000000101.60000
000000111.59375
000001001.58750
000001011.58125
000001101.57500
000001111.56875
000010001.56250
000010011.55625
TABLE 3. VR11 VOLTAGE IDENTIFICATION CODES
(Continued)
VID7 VID6 VID5 VID4 VID3 VID2 VID1 VID0 VDAC
000010101.55000
000010111.54375
000011001.53750
000011011.53125
000011101.52500
000011111.51875
000100001.51250
000100011.50625
000100101.50000
000100111.49375
000101001.48750
000101011.48125
000101101.47500
000101111.46875
000110001.46250
000110011.45625
000110101.45000
000110111.44375
000111001.43750
000111011.43125
000111101.42500
000111111.41875
001000001.41250
001000011.40625
001000101.40000
001000111.39375
001001001.38750
001001011.38125
001001101.37500
001001111.36875
001010001.36250
001010011.35625
001010101.35000
001010111.34375
001011001.33750
001011011.33125
001011101.32500
001011111.31875
001100001.31250
16
FN6328.2
August 2, 2007
ISL6322
TABLE 3. VR11 VOLTAGE IDENTIFICATION CODES
(Continued)
VID7 VID6 VID5 VID4 VID3 VID2 VID1 VID0 VDAC
001100011.30625
001100101.30000
001100111.29375
001101001.28750
001101011.28125
001101101.27500
001101111.26875
001110001.26250
001110011.25625
001110101.25000
001110111.24375
001111001.23750
001111011.23125
001111101.22500
001111111.21875
010000001.21250
010000011.20625
010000101.20000
010000111.19375
010001001.18750
010001011.18125
010001101.17500
010001111.16875
010010001.16250
010010011.15625
010010101.15000
010010111.14375
010011001.13750
010011011.13125
010011101.12500
010011111.11875
010100001.11250
010100011.10625
010100101.10000
010100111.09375
010101001.08750
010101011.08125
010101101.07500
010101111.06875
TABLE 3. VR11 VOLTAGE IDENTIFICATION CODES
(Continued)
VID7 VID6 VID5 VID4 VID3 VID2 VID1 VID0 VDAC
010110001.06250
010110011.05625
010110101.05000
010110111.04375
010111001.03750
010111011.03125
010111101.02500
010111111.01875
011000001.01250
011000011.00625
011000101.00000
011000110.99375
011001000.98750
011001010.98125
011001100.97500
011001110.96875
011010000.96250
011010010.95625
011010100.95000
011010110.94375
011011000.93750
011011010.93125
011011100.92500
011011110.91875
011100000.91250
011100010.90625
011100100.90000
011100110.89375
011101000.88750
011101010.88125
011101100.87500
011101110.86875
011110000.86250
011110010.85625
011110100.85000
011110110.84375
011111000.83750
011111010.83125
011111100.82500
17
FN6328.2
August 2, 2007

ISL6322
TABLE 3. VR11 VOLTAGE IDENTIFICATION CODES
(Continued)
VID7 VID6 VID5 VID4 VID3 VID2 VID1 VID0 VDAC
011111110.81875
100000000.81250
100000010.80625
100000100.80000
100000110.79375
100001000.78750
100001010.78125
100001100.77500
100001110.76875
100010000.76250
100010010.75625
100010100.75000
100010110.74375
100011000.73750
100011010.73125
100011100.72500
100011110.71875
100100000.71250
100100010.70625
100100100.70000
100100110.69375
100101000.68750
100101010.68125
100101100.67500
100101110.66875
100110000.66250
100110010.65625
100110100.65000
100110110.64375
100111000.63750
100111010.63125
100111100.62500
100111110.61875
101000000.61250
101000010.60625
101000100.60000
101000110.59375
101001000.58750
101001010.58125
TABLE 3. VR11 VOLTAGE IDENTIFICATION CODES
(Continued)
VID7 VID6 VID5 VID4 VID3 VID2 VID1 VID0 VDAC
101001100.57500
101001110.56875
101010000.56250
101010010.55625
101010100.55000
101010110.54375
101011000.53750
101011010.53125
101011100.52500
101011110.51875
101100000.51250
101100010.50625
101100100.50000
11111110OFF
11111111OFF
TABLE 4. AMD 5-BIT VOLTAGE IDENTIFICATION CODES
VID4 VID3 VID2 VID1 VID0 VDAC
11111Off
111100.800
111010.825
111000.850
110110.875
110100.900
110010.925
110000.950
101110.975
101101.000
101011.025
101001.050
100111.075
100101.100
100011.125
100001.150
011111.175
011101.200
011011.225
011001.250
010111.275
18
FN6328.2
August 2, 2007
ISL6322
TABLE 4. AMD 5-BIT VOLTAGE IDENTIFICATION CODES
(Continued)
VID4 VID3 VID2 VID1 VID0 VDAC
010101.300
010011.325
010001.350
001111.375
001101.400
001011.425
001001.450
000111.475
000101.500
000011.525
000001.550
TABLE 5. AMD 6-BIT VOLTAGE IDENTIFICATION CODES
VID5 VID4 VID3 VID2 VID1 VID0 VDAC
0 0 0 0 0 0 1.5500
0 0 0 0 0 1 1.5250
0000101.5000
0000111.4750
0001001.4500
0001011.4250
0001101.4000
0001111.3750
0010001.3500
0010011.3250
0010101.3000
0010111.2750
0011001.2500
0011011.2250
0011101.2000
0011111.1750
0100001.1500
0100011.1250
0100101.1000
0100111.0750
0101001.0500
0101011.0250
0101101.0000
0101110.9750
0110000.9500
TABLE 5. AMD 6-BIT VOLTAGE IDENTIFICATION CODES
(Continued)
VID5 VID4 VID3 VID2 VID1 VID0 VDAC
0110010.9250
0110100.9000
0110110.8750
0111000.8500
0111010.8250
0111100.8000
0111110.7750
1000000.7625
1000010.7500
1000100.7375
1000110.7250
1001000.7125
1001010.7000
1001100.6875
1001110.6750
1010000.6625
1010010.6500
1010100.6375
1010110.6250
1011000.6125
1011010.6000
1011100.5875
1011110.5750
1100000.5625
1100010.5500
1100100.5375
1100110.5250
1101000.5125
1101010.5000
1101100.4875
1101110.4750
1110000.4625
1110010.4500
1110100.4375
1110110.4250
1111000.4125
1111010.4000
1111100.3875
1111110.3750
19
FN6328.2
August 2, 2007
ISL6322
Voltage Regulation
The integrating compensation network shown in Figure 6
insures that the steady-state error in the output voltage is
limited only to the error in the reference voltage (output of
the DAC) and offset errors in the OFS current source,
remote-sense and error amplifiers. Intersil specifies the
guaranteed tolerance of the ISL6322 to include the
combined tolerances of each of these elements.
The output of the error amplifier, V
, is compared to the
COMP
triangle waveform to generate the PWM signals. The PWM
signals control the timing of the Internal MOSFET drivers
and regulate the converter output so that the voltage at FB is
equal to the voltage at REF. This will regulate the output
voltage to be equal to Equation 8. The internal and external
circuitry that controls voltage regulation is illustrated in
Figure 6.
V
OUTVREFVOFS
– V
–=
DROOP
(EQ. 8)
The ISL6322 incorporates an internal differential remotesense amplifier in the feedback path. The amplifier removes
the voltage error encountered when measuring the output
voltage relative to the controller ground reference point
resulting in a more accurate means of sensing output
voltage. Connect the microprocessor sense pins to the
non-inverting input, VSEN, and inverting input, RGND, of the
remote-sense amplifier. The remote-sense output, V
DIFF
, is
connected to the inverting input of the error amplifier through
an external resistor.
Load-Line (Droop) Regulation
Some microprocessor manufacturers require a precisely
controlled output resistance. This dependence of output
voltage on load current is often termed “droop” or “load line”
regulation. By adding a well controlled output impedance,
the output voltage can effectively be level shifted in a
direction which works to achieve the load-line regulation
required by these manufacturers.
In other cases, the designer may determine that a more
cost-effective solution can be achieved by adding droop.
Droop can help to reduce the output-voltage spike that
results from fast load-current demand changes.
The magnitude of the spike is dictated by the ESR and ESL
of the output capacitors selected. By positioning the no-load
voltage level near the upper specification limit, a larger
negative spike can be sustained without crossing the lower
limit. By adding a well controlled output impedance, the
output voltage under load can effectively be level shifted
down so that a larger positive spike can be sustained without
crossing the upper specification limit.
EXTERNAL CIRCUIT ISL6322 INTERNAL CIRCUIT
COMP
VID DAC
C
C
R
C
+
R
(V
FB
DROOP
-
V
+
OUT
V
-
OUT
FIGURE 6. OUTPUT VOLT AGE AND LOAD-LINE
REGULATION WITH OFFSET ADJUSTMENT
C
REF
IDROOP
+ V
OFS
VDIFF
VSEN
RGND
REF
FB
)
1k
ERROR
AMPLIFIER
I
AVG
+
-
I
OFS
+
-
DIFFERENTIAL
REMOTE-SENSE
AMPLIFIER
V
COMP
As shown in Figure 6, a current proportional to the average
current of all active channels, I
load-line regulation resistor R
across R
is proportional to the output current, effectively
FB
, flows from FB through a
AVG
. The resulting voltage drop
FB
creating an output voltage droop with a steady-state value
defined in Equation 9:
V
DROOPIAVGRFB
⋅=
(EQ. 9)
The regulated output voltage is reduced by the droop voltage
V
. The output voltage as a function of load current is
DROOP
derived by combining Equation 9 with Equation 10.
I
V
OUTVREFVOFS
–
In Equation 10, V
⎛⎞
–=
⎜⎟
⎝⎠
is the reference voltage, V
REF
programmed offset voltage, I
of the converter, R
is the internal sense resistor
ISEN
connected to the ISEN+ pin, and R
DCR
OUT
-------------
----------------- -
⋅⋅
N
R
ISEN
is the total output current
OUT
R
FB
is the feedback
FB
OFS
(EQ. 10)
is the
resistor, N is the active channel number, and DCR is the
Inductor DCR value.
Therefore the equivalent load-line impedance, i.e. droop
impedance, is equal to Equation 11:
R
DCR
FB
------------
----------------- -
R
LL
⋅=
N
R
ISEN
(EQ. 11)
20
FN6328.2
August 2, 2007
Output-Voltage Offset Programming
The ISL6322 allows the designer to accurately adjust the
offset voltage by connecting a resistor, R
pin to VCC or GND. When R
is connected between OFS
OFS
and VCC, the voltage across it is regulated to 1.6V. This
causes a proportional current (I
If R
regulated to 0.4V, and I
is connected to ground, the voltage across it is
OFS
flows out of the FB pin. The
OFS
) to flow into the FB pin.
OFS
offset current flowing through the resistor between VDIFF
and FB will generate the desired offset voltage which is
equal to the product (I
x RFB). These functions are
OFS
shown in Figures 7 and 8.
, from the OFS
OFS
ISL6322
V
+
OFS
-
VDIFF
FB
I
OFS
E/A
REF
R
FB
I
OFS
VCC
1:1
CURRENT
MIRROR
Once the desired output offset voltage has been determined,
use the following formulas to set R
For Negative Offset (connect R
0.4 RFB⋅
OFS
--------------------------
=
V
OFFSET
R
For Positive Offset (connect R
1.6 RFB⋅
R
-
OFS
+
OFS
--------------------------
=
OFS
V
OFFSET
FB
I
R
FB
VDIFF
VCC
OFS
FIGURE 7. POSITIVE OFFSET OUTPUT VOLTAGE
OFS
1:1
CURRENT
MIRROR
ISL6322
PROGRAMMING
OFS
OFS
OFS
to GND):
to VCC):
I
OFS
:
(EQ. 12)
(EQ. 13)
E/A
REF
-
1.6V
+
VCC
+
0.4V
OFS
R
OFS
GND
FIGURE 8. NEGATIVE OFFSET OUTPUT VOLT AGE
ISL6322
PROGRAMMING
-
GND
INTEL DYNAMIC VID TRANSITIONS
When in Intel VR10 or VR11 mode, the ISL6322 checks the
VID inputs on the positive edge of an internal 3MHz clock. If
a new code is established and it remains stable for 3
consecutive readings (1μs to 1.33μs), the ISL6322
recognizes the new code and changes the internal DAC
reference directly to the new level. The Intel processor
controls the VID transitions and is responsible for
incrementing or decrementing one VID step at a time. In
VR10 and VR11 settings, the ISL6322 will immediately
change the internal DAC reference to the new requested
value as soon as the request is validated, which means the
fastest recommended rate at which a bit change can occur is
once every 2μs. In cases where the reference step is too
large, the sudden change can trigger overcurrent or
overvoltage events.
In order to ensure the smooth transition of output voltage
during a VR10 or VR11 VID change, a VID step change
smoothing network is required. This network is composed of
an internal 1kΩ resistor between the DAC and the REF pin,
and the external capacitor C
ground. The selection of C
, between the REF pin and
REF
is based on the time duration
REF
for 1-bit VID change and the allowable delay time.
Dynamic VID
Modern microprocessors need to make changes to their core
voltage as part of normal operation. They direct the ISL6322
to do this by making changes to the VID inputs. The ISL6322
is required to monitor the DAC inputs and respond to
on-the-fly VID changes in a controlled manner, supervising a
safe output voltage transition without discontinuity or
disruption. The DAC mode the ISL6322 is operating in
determines how the controller responds to a dynamic VID
change.
21
Assuming the microprocessor controls the VID change at
1 bit every T
, the relationship between C
VID
REF
and T
VID
is
given by Equation 14.
C
REF
0.001 S() T
⋅=
VID
(EQ. 14)
As an example, for a VID step change rate of 5μs per bit, the
value of C
is 5600pF based on Equation 14.
REF
FN6328.2
August 2, 2007

ISL6322
AMD Dynamic VID Transitions
When running in AMD 5-bit or 6-bit modes of operation, the
ISL6322 responds differently to a dynamic VID change than
when in Intel VR10 or VR11 mode. In the AMD modes, the
ISL6322 still checks the VID inputs on the positive edge of
an internal 3MHz clock. In these modes the VID code can be
changed by more than a 1-bit step at a time. If a new code is
established and it remains stable for 3 consecutive readings
(1μs to 1.33μs), the ISL6322 recognizes the change and
begins slewing the DAC in 6.25mV steps at a stepping
frequency of 330kHz until the VID and DAC are equal. Thus,
the total time required for a VID change, t
only on the size of the VID change (ΔV
VID
DVID
).
, is dependent
The time required for a ISL6322-based converter in AMD 5-bit
DAC configuration to make a 1.1V to 1.5V reference voltage
change is about 194μs, as calculated using the following
equation.
V
t
DVID
1
------------------------- -
330 10
×
Δ
VID
⎛⎞
---------------------
⋅=
⎝⎠
3
0.00625
(EQ. 15)
In order to ensure the smooth transition of output voltage
during an AMD VID change, a VID step change smoothing
network is required. This network is composed of an internal
1kΩ resistor between the DAC and the REF pin, and the
external capacitor C
For AMD VID transitions C
, between the REF pin and ground.
REF
should be a 1000pF
REF
capacitor.
User Selectable Adaptive Deadtime Control
Techniques
The ISL6322 integrated drivers incorporate two different
adaptive deadtime control techniques, which the user can
choose between. Both of these control techniques help to
minimize deadtime, resulting in high efficiency from the reduced
freewheeling time of the lower MOSFET body-diode
conduction, and both help to prevent the upper and lower
MOSFETs from conducting simultaneously. This is
accomplished by ensuring either rising gate turns on its
MOSFET with minimum and sufficient delay after the other has
turned off.
The difference between the two adaptive deadtime control
techniques is the method in which they detect that the lower
MOSFET has transitioned off in order to turn on the upper
MOSFET. The state of the internal I
which of the two control techniques is active (see pages 27
through 31 for details of controlling deadtime control with
2
I
C). The default setting is PHASE Detect. If the PHASE
Detect Scheme is chosen, the voltage on the PHASE pin is
monitored to determine if the lower MOSFET has
transitioned off or not. Choosing the LGATE Detect Scheme
instructs the controller to monitor the voltage on the LGATE
pin to determine if the lower MOSFET has turned off or not.
For both schemes, the method for determining whether the
upper MOSFET has transitioned off in order to signal to turn
on the lower MOSFET is the same.
2
C registers determines
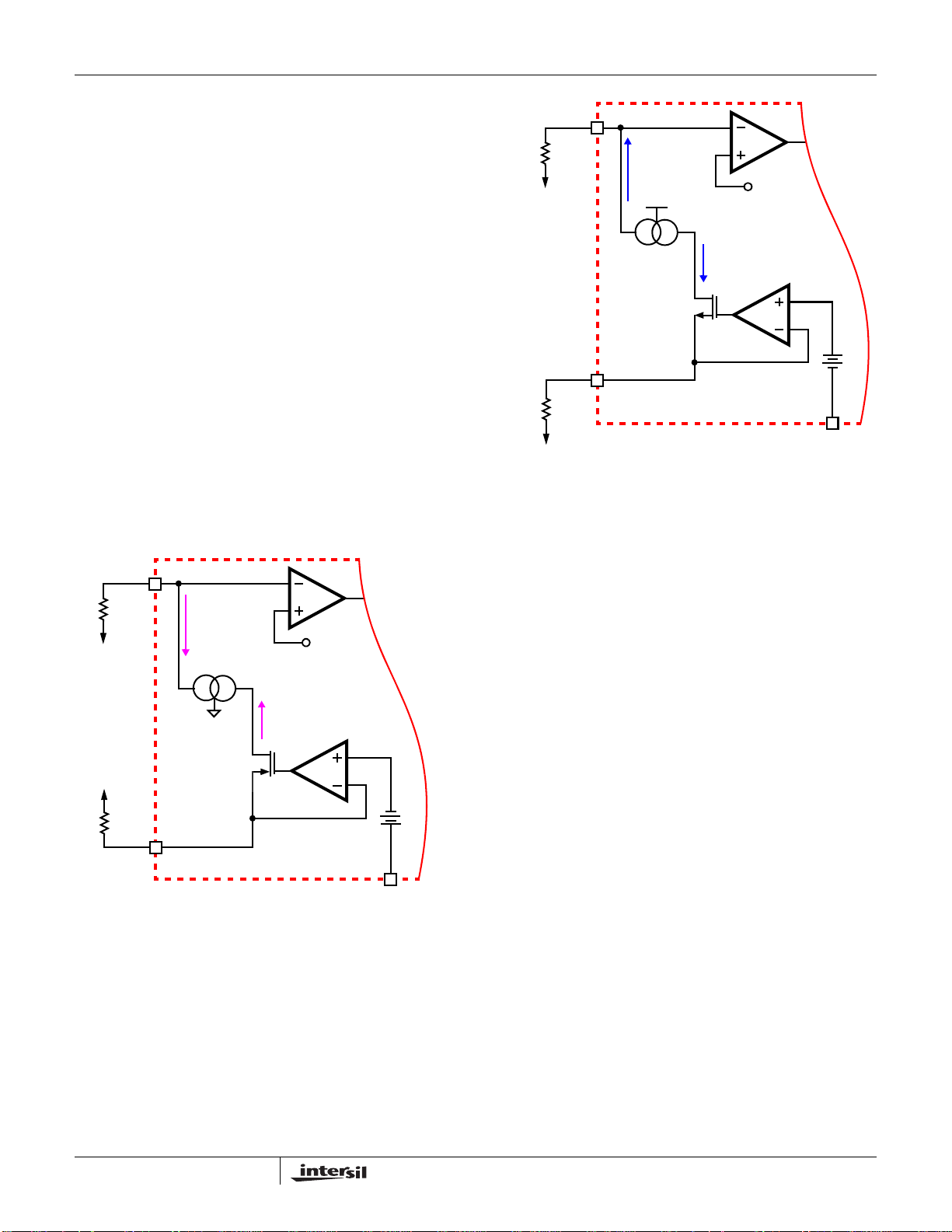
PHASE DETECT
For the PHASE detect scheme, during turn-off of the lower
MOSFET, the PHASE voltage is monitored until it reaches a
-0.3V/+0.8V (forward/reverse inductor current). At this time the
UGA TE is released to rise. An auto-zero comparator is used to
correct the r
detection of the -0.3V phase level during r
drop in the phase voltage preventing false
DS(ON)
DS(ON)
conduction
period. In the case of zero current, the UGATE is released after
35ns delay of the LGATE dropping below 0.5V . When LGATE
first begins to transition low, this quick transition can disturb the
PHASE node and cause a false trip, so there is 20ns of
blanking time once LGATE falls until PHASE is monitored.
Once the PHASE is high, the advanced adaptive
shoot-through circuitry monitors the PHASE and UGATE
voltages during a PWM falling edge and the subsequent
UGATE turn-off. If either the UGATE falls to less than 1.75V
above the PHASE or the PHASE falls to less than +0.8V , the
LGATE is released to turn-on.
LGA TE DETECT
For the LGA TE dete ct scheme, during turn-of f of the lower
MOSFET, the LGA TE voltage is monitored until it reaches
1.75V . At this time the UGATE is released to rise.
Once the PHASE is high, the advanced adaptive
shoot-through circuitry monitors the PHASE and UGATE
voltages during a PWM falling edge and the subsequent
UGATE turn-off. If either the UGATE falls to less than 1.75V
above the PHASE or the PHASE falls to less than +0.8V , the
LGATE is released to turn-on.
Internal Bootstrap Device
All three integrated drivers feature an internal bootstrap
schottky diode. Simply adding an external capacitor across
the BOOT and PHASE pins completes the bootstrap circuit.
The bootstrap function is also designed to prevent the
bootstrap capacitor from overcharging due to the large
negative swing at the PHASE node. This reduces voltage
stress on the boot to phase pins.
The bootstrap capacitor must have a maximum voltage
rating above PVCC + 4V and its capacitance value can be
chosen from Equation 22:
Q
GATE
--------------------------------------
C
BOOT_CAP
Q
GATE
where Q
at V
GS1
control MOSFETs. The ΔV
allowable droop in the rail of the upper gate drive.
≥
ΔV
BOOT_CAP
QG1PVCC⋅
----------------------------------
V
is the amount of gate charge per upper MOSFET
G1
GS1
⋅=
N
Q1
(EQ. 16)
gate-source voltage and NQ1 is the number of
BOOT_CAP
term is defined as the
22
FN6328.2
August 2, 2007

ISL6322
1.6
1.4
1.2
1.0
(µF)
0.8
0.6
BOOT_CAP
C
0.4
0.2
20nC
0.0
FIGURE 9. BOOTSTRAP CAPACITANCE vs BOOT RIPPLE
Q
50nC
VOLTAGE
= 100nC
GATE
0.30.0 0.1 0.2 0.4 0.5 0.6 0.90.7 0.8 1.0
ΔV
BOOT_CAP
(V)
Gate Drive Voltage Versatility
The ISL6322 provides the user flexibility in choosing the
gate drive voltage for efficiency optimization. The controller
ties the upper and lower drive rails together. Simply applying
a voltage from 5V up to 12V on PVCC sets both gate drive
rail voltages simultaneously.
Initialization
Prior to initialization, proper conditions must exist on the EN,
VCC, PVCC and the VID pins. When the conditions are met,
the controller begins soft-start. Once the output voltage is
within the proper window of operation, the controller asserts
PGOOD.
Enable and Disable
While in shutdown mode, the PWM outputs are held in a
high-impedance state to assure the drivers remain off. The
following input conditions must be met, for both Intel and
AMD modes of operation, before the ISL6322 is released
from shutdown mode to begin the soft-start startup
sequence:
1. The bias voltage applied at VCC must reach the internal
power-on reset (POR) rising threshold. Once this
threshold is reached, proper operation of all aspects of
the ISL6322 is guaranteed. Hysteresis between the rising
and falling thresholds assure that once enabled, the
ISL6322 will not inadvertently turn off unless the bias
voltage drops substantially (see “Electrical
Specifications” on page 7).
2. The voltage on EN must be above 0.85V. The EN input
allows for power sequencing between the controller bias
voltage and another voltage rail. The enable comparator
holds the ISL6322 in shutdown until the voltage at EN
rises above 0.85V . The enable comparator has 110mV of
hysteresis to prevent bounce.
ISL6322 INTERNAL CIRCUIT
POR
CIRCUIT
SOFT-START
AND
FAULT LOGIC
FIGURE 10. POWER SEQUENCING USING THRESHOLD-
SENSITIVE ENABLE (EN) FUNCTION
ENABLE
COMPARATOR
+
-
0.85V
+
-
1.21V
EXTERNAL CIRCUIT
VCC
PVCC1
+12V
10.7kΩ
EN
1.40kΩ
EN_PH4
3. The voltage on the EN_PH4 pin must be above 1.21V.
The EN_PH4 input allows for power sequencing between
the controller and the external driver.
4. The driver bias voltage applied at the PVCC pins must
reach the internal power-on reset (POR) rising threshold.
In order for the ISL6322 to begin operation, PVCC1 is the
only pin that is required to have a voltage applied that
exceeds POR. However, for 2 or 3-phase operation
PVCC2 and PVCC3 must also exceed the POR
threshold. Hysteresis between the rising and falling
thresholds assure that once enabled, the ISL6322 will not
inadvertently turn off unless the PVCC bias voltage drops
substantially (see “Electrical Specifications” on page 7).
For Intel VR10, VR11 and AMD 6-bit modes of operation
these are the only conditions that must be met for the
controller to immediately begin the soft-start sequence. If
running in AMD 5-bit mode of operation there is one more
condition that must be met:
5. The VID code must not be 111 1 1 in AMD 5-bit mode. This
code signals the controller that no load is present. The
controller will not allow soft-start to begin if this VID code
is present on the VID pins.
Once all of these conditions are met the controller will begin
the soft-start sequence and will ramp the output voltage up
to the user designated level.
Intel Soft-Start
The soft-start function allows the converter to bring up the
output voltage in a controlled fashion, resulting in a linear
ramp-up. The soft-start sequence for the Intel modes of
operation is slightly different then the AMD soft-start
sequence.
23
FN6328.2
August 2, 2007
ISL6322
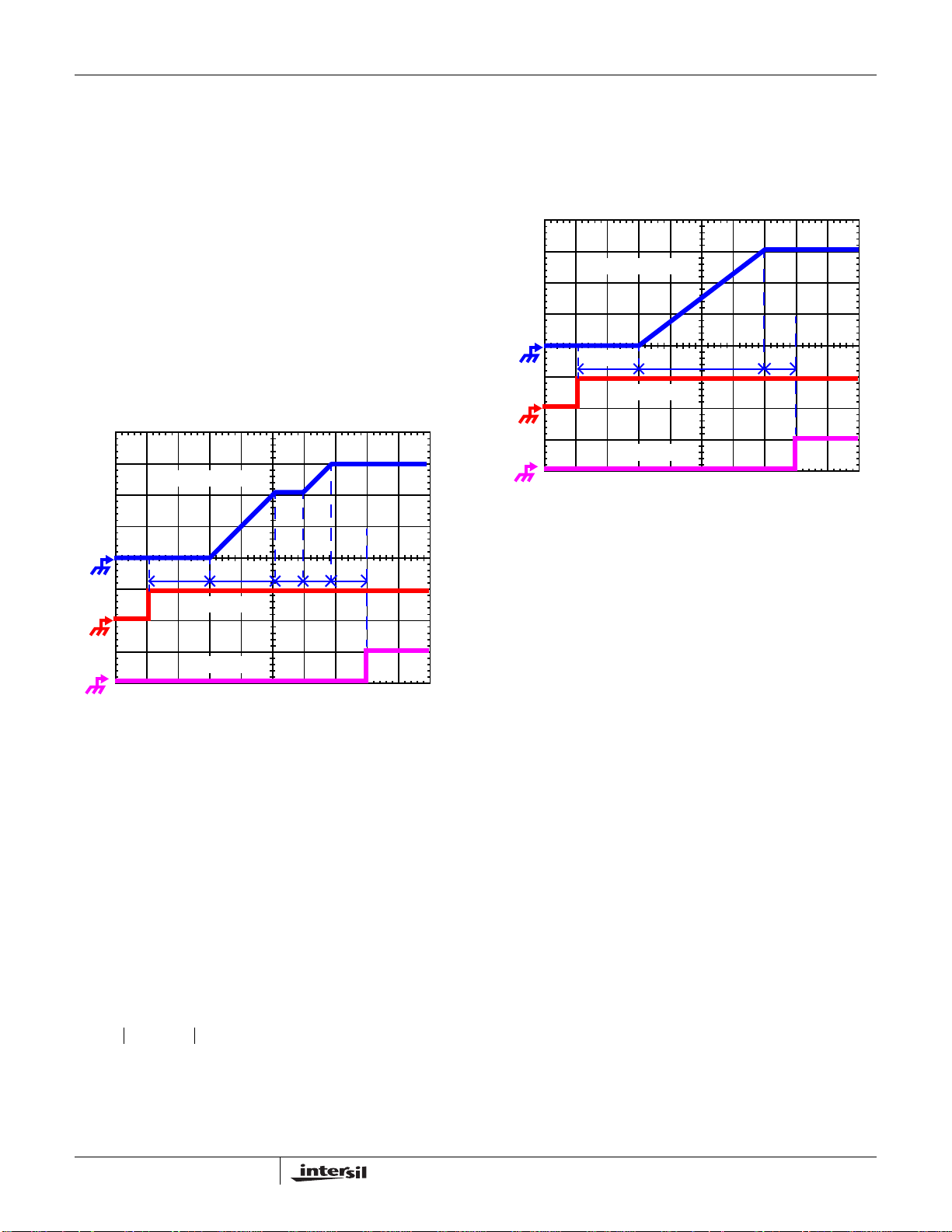
For the Intel VR10 and VR11 modes of operation, the
soft-start sequence is composed of four periods, as shown in
Figure 11. Once the ISL6322 is released from shutdown and
soft-start begins (as described in the “Enable and Disable”
on page 23), the controller will have fixed delay period TD1.
After this delay period, the VR will begin first soft-start ramp
until the output voltage reaches 1.1V VBOOT voltage. Then,
the controller will regulate the VR voltage at 1.1V for another
fixed period TD3. At the end of TD3 period, ISL6322 will
read the VID signals. If the VID code is valid, ISL6322 will
initiate the second soft-start ramp until the output voltage
reaches the VID voltage plus/minus any offset or droop
voltage.
The soft-start time is the sum of the four periods as shown in
Equation 17.
T
TD1TD2TD3TD4+++=
SS
VOUT, 500mV/DIV
(EQ. 17)
NOTE: If the SS pin is grounded, the soft-start ramp in TD2
and TD4 will be defaulted to a 6.25mV step frequency of
330kHz.
After the DAC voltage reaches the final VID setting, PGOOD
will be set to high with the fixed delay TD5. The typical value
for TD5 is 440µs.
VOUT, 500mV/DIV
TDA
EN_VTT
PGOOD
FIGURE 12. AMD SOFT-START WAVEFORMS
TDB
500µs/DIV
TDC
TD1
EN_VTT
PGOOD
FIGURE 11. INTEL SOFT-START WAVEFORMS
TD2
500µs/DIV
TD3 TD4
TD5
TD1 is a fixed delay with the typical value as 1.40ms. TD3 is
determined by the fixed 85µs plus the time to obtain valid
VID voltage. If the VID is valid before the output reaches the
1.1V, the minimum time to validate the VID input is 500ns.
Therefore the minimum TD3 is about 86µs.
During TD2 and TD4, ISL6322 digitally controls the DAC
voltage change at 6.25mV per step. The time for each step is
determined by the frequency of the soft-start oscillator which
is defined by the resistor R
from SS pin to GND. The
SS
second soft-start ramp time TD2 and TD4 can be calculated
based on the following equations:
1.1 R⋅
SS
TD2
------------------------
6.25 25⋅
μs()=
(EQ. 18)
AMD Soft-Start
For the AMD 5-bit and 6-bit modes of operation, the
soft-start sequence is composed of three periods, as shown
in Figure 12. At the beginning of soft-start, the VID code is
immediately obtained from the VID pins, followed by a fixed
delay period TDA. After this delay period the ISL6322 will
begin ramping the output voltage to the desired DAC level at
a fixed rate of 6.25mV per step, with a stepping frequency of
330kHz. The amount of time required to ramp the output
voltage to the final DAC voltage is referred to as TDB, and
can be calculated as shown in Equation 20.
TDB
×
330 10
1
------------------------- -
After the DAC voltage reaches the final VID setting, PGOOD
will be set to high with the fixed delay TDC. The typical value
for TDC can range between 1.5ms and 3.0ms.
V
VID
⎛⎞
---------------------
⋅=
⎝⎠
3
0.00625
(EQ. 20)
V
1.1–()RSS⋅
TD4
6.25 25⋅
μs()=
VID
----------------------------------------------------
For example, when VID is set to 1.5V and the R
is set at
SS
(EQ. 19)
100kΩ, the first soft-start ramp time TD2 will be 704µs and
the se c o nd s oft-st a rt r am p ti m e TD 4 will be 256µs.
24
FN6328.2
August 2, 2007
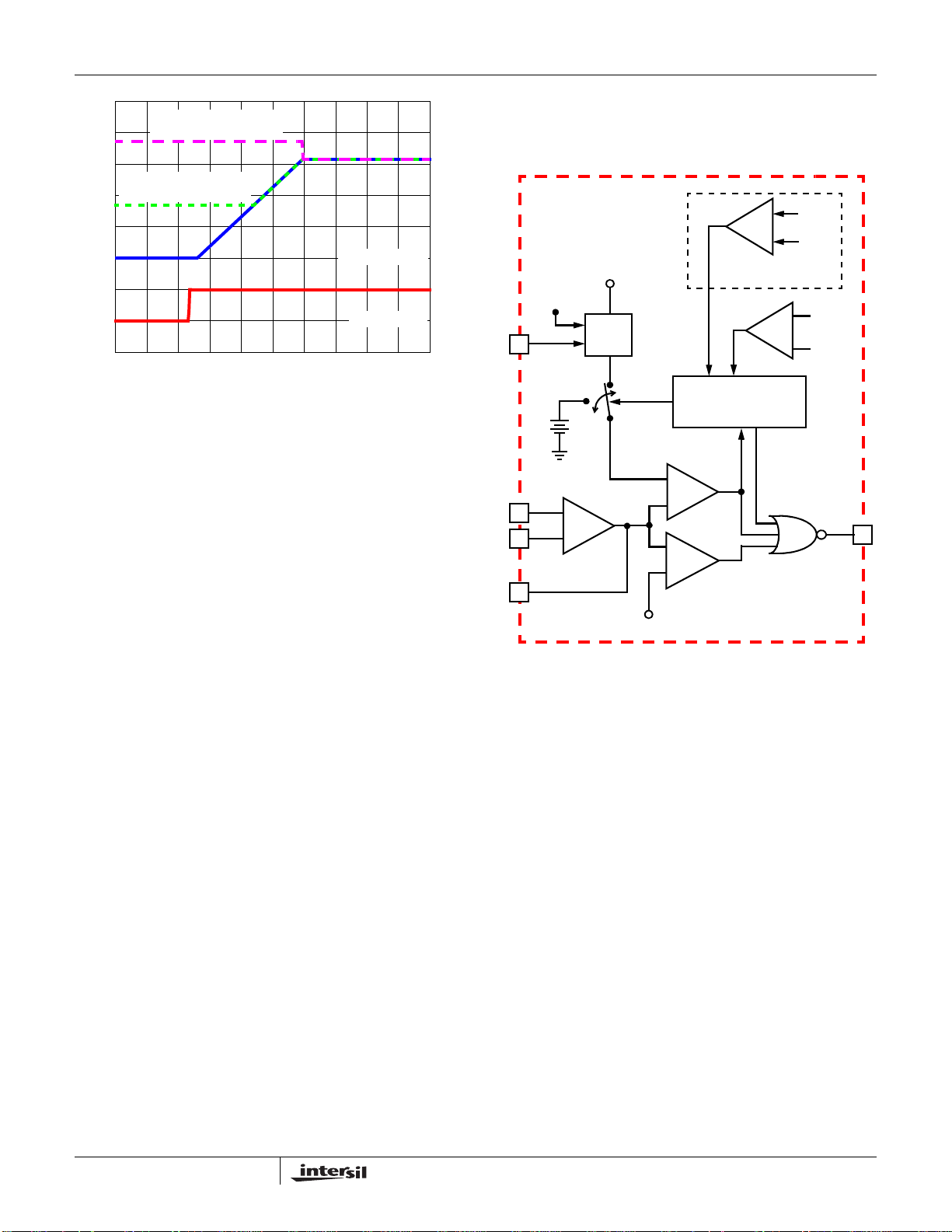
OUTPUT PRECHARGED
ABOVE DAC LEVEL
OUTPUT PRECHARGED
BELOW DAC LEVEL
V
GND>
GND>
T1
T2
FIGURE 13. SOFT-START W A VEFORMS FOR ISL6322-BASED
MULTIPHASE CONVERTER
T3
(0.5V/DIV)
OUT
EN (5V/DIV)
Pre-Biased Soft-Start
The ISL6322 also has the ability to start up into a
pre-charged output, without causing any unnecessary
disturbance. The FB pin is monitored during soft-start, and
should it be higher than the equival e nt internal ramping
reference voltage, the output drives hold both MOSFETs off.
Once the internal ramping reference exceeds the FB pin
potential, the output drives are enabled, allowing the output
to ramp from the pre-charged level to the final level dictated
by the DAC setting. Should the output be pre-charged to a
level exceeding the DAC setting, the output drives are
enabled at the end of the soft-start period, leading to an
abrupt correction in the output voltage down to the DAC-set
level.
ISL6322
controller latches off and PGOOD will not return high until
after a successful soft-start. In the case of an undervoltage
event, PGOOD will return high when the output voltage
returns to within the undervoltage.
170μA
-
OCL
+
I
1
REPEAT FOR
EACH CHANNEL
-
OCP
+
125μA
I
AVG
I2C OVP
REGISTER
VRSEL
V
OVP
VDAC
+175mV,
+250mV,
+350mV
SOFT-START, FAULT
AND CONTROL LOGIC
-
VSEN
RGND
+
x1
-
OV
+
PGOOD
-
UV
+
VDIFF
0.60 x DAC
FIGURE 14. POWER GOOD AND PROTECTION CIRCUITRY
ISL6322 INTERNAL CIRCUITRY
Fault Monitoring and Protection
The ISL6322 actively monitors output voltage and current to
detect fault conditions. Fault monitors trigger protective
measures to prevent damage to a microprocessor load. One
common power good indicator is provided for linking to
external system monitors. The schematic in Figure 14
outlines the interaction between the fault monitors and the
power good signal.
Power Good Signal
The power good pin (PGOOD) is an open-drain logic output
that signals whether or not the ISL6322 is regulating the
output voltage within the proper levels, and whether any fault
conditions exist. This pin should be tied to a +5V source
through a resistor.
During shutdown and soft-start PGOOD pulls low and
releases high after a successful soft-start and the output
voltage is operating between the undervoltage and
overvoltage limits. PGOOD transitions low when an
undervoltage, overvoltage, or overcurrent condition is
detected or when the controller is disabled by a reset from
EN, EN_PH4, POR, or one of the no-CPU VID codes. In the
event of an overvoltage or overcurrent condition, the
Undervoltage Detection
The undervoltage threshold is set at 60% of the VID code.
When the output voltage (VSEN-RGND) is below the
undervoltage threshold, PGOOD gets pulled low. No other
action is taken by the controller. PGOOD will return high if
the output voltage rises above 70% of the VID code.
Overvoltage Protection
The ISL6322 constantly monitors the sensed output volt age
on the VDIFF pin to detect if an overvoltage event occurs.
When the output voltage rises above the OVP trip level
actions are taken by the ISL6322 to protect the
microprocessor load. The overvoltage protection trip level
changes depending on what mode of operation the controller
is in and what state the I
in. Table 6 and 7 below list what the OVP trip levels are under
all conditions (see pages 27 through 31 for details of
controlling OVP thresholds with I
At the inception of an overvoltage event, LGATE1, LGATE2
and LGATE3 are commanded high, PWM4 is commanded
low, and the PGOOD signal is driven low. This turns on the
all of the lower MOSFET s and pulls the output voltage below
2
C registers and the VRSEL pin are
2
C).
25
FN6328.2
August 2, 2007

ISL6322
a level that might cause damage to the load. The LGATE
outputs remain high and PWM4 remains low until VDIFF falls
100mV below the OVP threshold that tripped the overvoltage
protection circuitry. The ISL6322 will continue to protect the
load in this fashion as long as the overvoltage condition
recurs.
Once an overvoltage condition ends, the ISL6322 latches off
and must be reset by toggling EN, or through POR, before a
soft-start can be re-initiated.
TABLE 6. INTEL VR10 AND VR11 OVP THRESHOLDS
MODE OF
OPERATION DEFAULT ALTERNATE
Soft-Start
(TD1 and TD2)
Soft-Start
(TD3 and TD4)
Normal Operation VDAC+250mV VDAC+175mV
TABLE 7. AMD OVP THRESHOLDS
MODE OF
OPERATION DEFAULT ALTERNATE
Soft-Start 2.200V and
Normal Operation VDAC+250mV VDAC+175mV
1.280V and
VDAC+250mV
(higher of the two)
VDAC+250mV VDAC+175mV
VDAC+250mV
(higher of the two)
1.280V and
VDAC+175mV
(higher of the two)
2.200V and
VDAC+175mV
(higher of the two)
One exception that overrides the overvoltage protection
circuitry is a dynamic VID transition in AMD modes of
operation. If a new VID code is detected during normal
operation, the OVP protection circuitry is disabled from the
beginning of the dynamic VID transition, until 50μs after the
internal DAC reaches the final VID setting. This is the only
time during operation of the ISL6322 that the OVP circuitry is
not active.
Pre-POR Overvoltage Protection
Prior to PVCC and VCC exceeding their POR levels, the
ISL6322 is designed to protect the load from any overvoltage
events that may occur. This is accomplished by means of an
internal 10kΩ resistor tied from PHASE to LGATE, which
turns on the lower MOSFET to control the output voltage
until the overvoltage event ceases or the input power supply
cuts off. For complete protection, the low side MOSFET
should have a gate threshold well below the maximum
voltage rating of the load/microprocessor.
In the event that during normal operation the PVCC or VCC
voltage falls back below the POR threshold, the pre-POR
overvoltage protection circuitry reactivates to protect from
any more pre-POR overvoltage events.
Open Sense Line Prevention
In the case that either of the remote sense lines, VSEN or
GND, become open, the ISL6322 is designed to prevent the
controller from regulating. This is accomplished by means of
a small 5μA pull-up current on VSEN, and a pull-down
current on RGND. If the sense lines are opened at any time,
the voltage difference between VSEN and RGND will
increase until an overvoltage event occurs, at which point
overvoltage protection activates and the controller stops
regulating. The ISL6322 will be latched off and cannot be
restarted until the controller is reset.
Overcurrent Protection
The ISL6322 takes advantage of the proportionality between
the load current and the average current, I
overcurrent condition. See “Continuous Current Sampling”
on page 13 for more detail on how the average current is
measured. The average current is continually compared with
a constant 125μA OCP reference current as shown in
Figure 14. Once the average current exceeds the OCP
reference current, a comparator triggers the converter to
begin overcurrent protection procedures.
This method for detecting overcurrent events limits the
minimum overcurrent trip threshold because of the fact the
ISL6322 uses set internal R
current sense resistors.
ISEN
The minimum overcurrent trip threshold is dictated by the
DCR of the inductors and the number of active channels. To
calculate the minimum overcurrent trip level, I
Equation 21, where N is the number of active channels, DCR
is the individual inductor’s DCR, and R
internal current sense resistor.
I
OCP min,
125 106–R
----------------------------------------------------------
=
DCR
ISEN
N⋅⋅ ⋅
If the desired overcurrent trip level is greater then the
minimum overcurrent trip level, I
OCP,min
divider R-C circuit around the inductor shown in Figure 5
should be used to set the desired trip level.
I
I
⎛⎞
⎜⎟
OCP
⎝⎠
>
OCPIOCP min,
125 106–R
----------------------------------------------------------
DCR
ISEN
N⋅⋅ ⋅
R1R2+
⎛⎞
---------------------
⋅=
⎜⎟
R
⎝⎠
2
The overcurrent trip level of the ISL6322 cannot be set any
lower than the I
OCP,min
level calculated in Equation 22.
At the beginning of overcurrent shutdown, the controller sets
all of the UGATE and LGATE signals low, puts PWM4 in a
high-impedance state, and forces PGOOD low. This turns off
all of the upper and lower MOSFET s. The system remains in
this state for a fixed period of 12ms. If the controller is still
enabled at the end of this wait period, it will attempt a
soft-start. If the fault remains, the trip-retry cycles will
continue indefinitely until either the controller is disabled or
the fault is cleared. Note that the energy delivered during
trip-retry cycling is much less than during full-load operation,
so there is no thermal hazard.
, to detect an
AVG
OCP,min
is the 300Ω
ISEN
(EQ. 21)
, then the resistor
(EQ. 22)
, use
26
FN6328.2
August 2, 2007

OUTPUT CURRENT, 50A/DIV
0A
OUTPUT VOLTAGE,
500mV/DIV
0V
FIGURE 15. OVERCURRENT BEHAVIOR IN HICCUP MODE
3ms/DIV
Individual Channel Overcurrent Limiting
The ISL6322 has the ability to limit the current in each
individual channel without shutting down the entire regulator.
This is accomplished by continuously comparing the sensed
currents of each channel with a constant 170μA OCL
reference current as shown in Figure 14. If a channel’s
individual sensed current exceeds this OCL limit, the UGATE
signal of that channel is immediately forced low, and the
LGATE signal is forced high. This turns off the upper
MOSFET(s), turns on the lower MOSFET(s), and stops the
rise of current in that channel, forcing the current in the
channel to decrease. That channel’s UGATE signal will not
be able to return high until the sensed channel current falls
back below the 170μA reference.
I2C Bus Interface
The ISL6322 includes an I2C bus interface which allows for
user programmability of four of the controller’s operating
parameters. The operating parameters that can be adjusted
through the I
1. Voltage Marg ining Offset: The output voltage can be
positively offset up to +787.5mV in 12.5mV increments.
2. Adaptive Deadtime Control: Selects between LGATE
Detect and PHASE Detect deadtime control schemes as
described in the User Selectable Adaptive Deadtime
Control Techniques section.
3. Overvoltage Trip Level: Selects the overvoltage
protection trip threshold as described in the Overvoltage
Protection section.
4. Switching Frequency: The switching frequency can be
increased by a fixed +15% or +30%, or can be decreased
by -15% or -30%.
To adjust these four parameters, data transmission from the
main microprocessor to the ISL6322 and vice versa must take
place through the two wire I
2
the I
and the SCL line, which is a clock signal used to synchronize
sending/receiving of the data.
2
C are:
2
C bus interface. The two wires of
C bus consist of the SDA line, over which all data is sent,
ISL6322
Both SDA and SCL are bidirectional lines, externally connected
to a positive supply voltage via a pull-up resistor. Pull-up
resistor values should be chosen to limit the input current to
less then 3mA. When the bus is free, both lines are HIGH. The
output stages of ISL6322 have an open drain/open collector in
order to perform the wired-AND function. Data on the I
2
C bus
can be transferred up to 100kbps in the standard-mode or up to
400Kbps in the fast-mode. The level of logic “0” and logic “1” is
dependent on associated value of V
as per the “Electrical
DD
Specifications” table. One clock pulse is generated for each
data bit transferred. The ISL6322 is a “SLA VE only” device, so
the SCL line must always be controlled by an external master.
It is important to note that the I
2
C interface of the ISL6322
only works once the voltage on the VCC pin has risen above
the POR rising threshold. The I
2
C will continue to remain
active until the voltage on the VCC pin falls back below the
falling POR threshold level.
Data Validity
The data on the SDA line must be stable during the HIGH
period of the SCL, unless generating a START or STOP
condition. The HIGH or LOW state of the data line can only
change when the clock signal on the SCL line is LOW. Refer
to Figure 16.
SDA
SCL
DATA LINE
STABLE
DATA VALID
FIGURE 16. DATA VALIDITY
CHANGE
OF DATA
ALLOWED
START and STOP Conditions
As shown in Figure 17, a START (S) condition is a HIGH to
LOW transition of the SDA line while SCL is HIGH.
The STOP (P) condition is a LOW to HIGH transition on the
SDA line while SCL is HIGH. A STOP condition must be sent
before each START condition.
SDA
SCL
SP
START
CONDITION
FIGURE 17. START AND STOP WAVEFORMS
STOP
CONDITION
Byte Format
Every byte put on the SDA line must be eight bits long. The
number of bytes that can be transmitted per transfer is
unrestricted. Each byte has to be followed by an
acknowledge bit. Data is transferred with the most significant
bit first (MSB) and the least significant bit last (LSB).
27
FN6328.2
August 2, 2007

ISL6322
Acknowledge
Each address and data transmission uses 9 clock pulses.
The ninth pulse is the acknowledge bit (A). After the start
condition, the master sends 7 slave address bits and a R/W
bit during the next 8 clock pulses. During the ninth clock
pulse, the device that recognizes its own address holds the
data line low to acknowledge. The acknowledge bit is also
used by both the master and the slave to acknowledge
receipt of register addresses and data as described below.
SCL
8
9
ACKNOWLEDGE
FROM SLAVE
SDA
START
1
MSB
FIGURE 18. ACKNOWLEDGE ON THE I2C BUS
2
ISL6322 I2C Slave Address
All devices on the I2C bus must have a 7-bit I2C address in
order to be recognized. The ISL6322 has two user
selectable addresses to ensure it does not interfere with
other devices on the bus. The address is programmed via
resistor on the SS/RST/A0 pin. Placing the Rss
the R
ss
resistor from the SS/RST/A0 pin to ground sets the I2C
address to be 1000_110. If the Rss resistor is placed from
the SS/RST/A0 pin to VCC the address is 1000_111.
Please note that the I2C address of the ISL6322 is
programmed from the SS/RST/A0 pin as soon as VCC rises
above the POR threshold. The ISL6322’s I
2
C address stays
the same and can not be repr ogrammed un til VCC fall s back
below the POR falling threshold.
Communicating Over the I2C Bus
Two transactions are supported on the I2C interface: 1) Write
register, 2) Read register from current address.
All transactions start with a control byte sent from the I
master device. The control byt e beg ins w ith a Start condition ,
followed by 7-bits of slave address. The last bit sent by the
master is the R/W bit and is 0 for a write or 1 for a read. If any
slaves on the I
2
C bus recognize their address, they will
Acknowledge by pulling the serial data line low for the last clock
cycle in the control byte. If no slaves exist at that address or are
not ready to communicate, the data line will be 1, indicating a
Not Acknowledge condition.
2
C
Adaptive Deadtime Control, Overvoltage Protection, and
Switching Frequency parameters. Once the ISL6322
receives a correct register address byte, it responds with an
acknowledge.
Writing to the Internal Registers
In order to change any of the four operating parameters via
the I2C bus, the internal registers must be written to. The
two registers inside the ISL6322 can be written individually
with two separate write transactions or sequentially with one
write transaction by sending two data bytes as described
below.
To write to a single register in the ISL6322, the master sends
a control byte with the R/W bit set to 0, indicating a write. If it
receives an Acknowledge from the ISL6322, it sends a
register address byte representing the internal register it
wants to write to (0000_0000 for RGS1 or 0000_0001 for
RGS2). The ISL6322 will respond with an Acknowledge. The
master then sends a byte representing the data byte to be
written into the desired register. The ISL6322 will respond
with an Acknowledge. The master then issues a Stop
condition, indicating to the ISL6322 that the current
transaction is complete. Once this transaction completes,
the ISL6322 will immediately update and change the
operating parameters on-the-fly.
It is also possible to write to both registers sequentially. To
do this the master must write to register RGS1 first. This
transaction begins with the master sending a control byte
with the R/W bit set to 0. If it receives an Acknowledge from
the ISL6322, it sends the register address byte 0000_0000,
representing the internal register RGS1. The ISL6322 will
respond with an Acknowledge. After sending the data byte to
RGS1 and receiving an Acknowledge from the ISL6322,
instead of sending a Stop condition, the master sends the
data byte to be stored in register RGS2. The ISL6322 will
respond with an Acknowledge. The master then issues a
Stop condition, indicating to the ISL6322 that the current
transaction is complete. Once this transaction completes the
ISL6322 will immediately update and change the operating
parameters on-the-fly.
Once the control byte is sent, and the ISL6322
acknowledges it, the 2nd byte sent by the master must be a
register address byte. This register address byte tells the
ISL6322 which one of the two internal registers it wants to
write to or read from. The address of the first internal
register, RGS1, is 0000_0000. This register sets the Voltage
Margining Offset. The address of the second internal
register, RGS2, is 0000_0001. This register sets the
28
FN6328.2
August 2, 2007

ISL6322
I2C Read and Write Protocol
Write to a Single Register
S slave_addr + W A reg_addr A reg_data A P
Write to Both Registers
S slave_addr + W A A A
Read from a Single Register
S A N
Read from Both Registers
S A
0000_0000 reg_RGS1_data reg_RGS 2_data A P
reg_addr A P Sslave_addr + W slave_addr + R A reg_data P
0000_0000 A P Sslave_addr + W slave_addr + R A reg_RGS1_data A reg_RGS2_data N P
Driven by Master
Driven by ISL6322
S = START Condition A = Acknowledge
P = STOP Condition N = No Acknowledge
Reading from the Internal Registers
The ISL6322 has the ability to read from both registers
separately or read from them consecutively. Prior to reading
from an internal register, the master must first select the
desired register by writing to it and sending the register’s
address byte. This process begins by the master sending a
control byte with the R/W bit set to 0, indicating a write. Once
it receives an Acknowledge from the ISL6322, it sends a
register address byte representing the internal register it
wants to read from (0000_0000 for RGS1 or 0000_0001 for
RGS2). The ISL6322 will respond with an Acknowledge. The
master must then respond with a Stop condition. After the
Stop condition, the master follows with a new Start condition,
and then sends a new control byte with the R/W bit set to 1,
indicating a read. The ISL6322 will then respond by sending
the master an Acknowledge, followed by the data byte
stored in that register. The master must then send a Not
Acknowledge followed by a Stop command, which will
complete the read transaction.
It is also possible for both registers to be read consecutively.
To do this the master must read from register RGS1 first.
This transaction begins with the master sending a control
byte with the R/W bit set to 0. If it receives an Acknowledge
from the ISL6322, it sends the register address byte
0000_0000, representing the internal register RGS1. The
ISL6322 will respond with an Acknowledge. The master
must then respond with a Stop condition. After the Stop
condition the master follows with a new Start condition, and
then sends a new control byte with the R/W bit set to 1,
indicating a read. The ISL6322 will then respond by sending
the master an Acknowledge, followed by the data byte
stored in register RGS. The master must then send an
Acknowledge, and after doing so, the ISL6322 will respond
by sending the data byte stored in register RGS2. The
master must then send a Not Acknowledge followed by a
Stop command, which will complete the read transaction.
Resetting the Internal Registers
The ISL6322’s two internal I2C registers always initialize to
0000_0000 when the controller first receives power. Once
the voltage on the VCC pin rises above the POR rising
threshold level, these registers can be changed at any time
via the I
below the POR falling threshold, the internal registers are
automatically reset to 0000_0000.
It is possible to reset the internal registers without powering
down the controller and without requiring the controller to
stop regulating and soft-start again. This can be done by one
of two methods. The first method is to simply write to the
internal registers over the I
The other method is pull the voltage on the SS/RST/A0 pin
down below 0.4V. This will immediately reset the internal
registers to 0000_0000 and will not stop the controller from
regulating the output voltage or cause soft-start to recycle.
2
C interface. If the voltage on the VCC pin falls
2
C interface to be 0000_0000.
TABLE 8. REGISTER RGS1 (VOLT AGE MARG INING OFFSET)
BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
xx
xx
xx0 0 0 0 1 0 25.0
xx
xx
xx
xx
xx
xx
xx
0 0 0 0 0 00.0
0 0 0 0 0 1 12.5
0 0 0 0 1 1 37.5
0 0 0 1 0 0 50.00
0 0 0 1 0 1 62.5
0 0 0 1 1 0 75.0
0 0 0 1 1 1 87.5
0 0 1 0 0 0 100.0
0 0 1 0 0 1 112.5
Voffset
(mV)X X VO5 VO4 VO3 VO2 VO1 VO0
29
FN6328.2
August 2, 2007

ISL6322
TABLE 8. REGISTER RGS1 (VOLT AGE MARGINING OFFSET)
BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
xx0 0 1 0 1 0 125.0
xx
xx
xx0 0 1 1 0 1 162.5
xx
xx
xx0 1 0 0 0 0 200.00
xx
xx
xx0 1 0 0 1 1 237.5
xx
xx
xx0 1 0 1 1 0 275.0
xx
xx
xx
xx0 1 1 0 1 0 325.0
xx
xx
xx0 1 1 1 0 1 362.5
xx
xx
xx1 0 0 0 0 0 400.0
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
xx
(Continued)
Voffset
(mV)X X VO5 VO4 VO3 VO2 VO1 VO0
0 0 1 0 1 1 137.5
0 0 1 1 0 0 150.0
0 0 1 1 1 0 175.0
0 0 1 1 1 1 187.5
0 1 0 0 0 1 212.5
0 1 0 0 1 0 225.0
0 1 0 1 0 0 250.0
0 1 0 1 0 1 262.5
0 1 0 1 1 1 287.5
0 1 1 0 0 0 300.0
0 1 1 0 0 1 312.5
0 1 1 0 1 1 337.5
0 1 1 1 0 0 350.0
0 1 1 1 1 0 375.0
0 1 1 1 1 1 387.5
1 0 0 0 0 1 412.5
1 0 0 0 1 0 425.0
1 0 0 0 1 1 437.5
1 0 0 1 0 0 450.0
1 0 0 1 0 1 462.5
1 0 0 1 1 0 475.0
1 0 0 1 1 1 487.5
1 0 1 0 0 0 500.0
1 0 1 0 0 1 512.5
1 0 1 0 1 0 525.0
1 0 1 0 1 1 537.5
1 0 1 1 0 0 550.0
1 0 1 1 0 1 562.5
1 0 1 1 1 0 575.0
1 0 1 1 1 1 587.5
TABLE 8. REGISTER RGS1 (VOLT AGE MARG INING OFFSET)
BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
xx1 1 0 0 0 0 600.0
xx
xx
xx1 1 0 0 1 1 637.5
xx
xx
xx1 1 0 1 1 0 675.0
xx
xx
xx1 1 1 0 0 1 712.5
xx
xx
xx1 1 1 1 0 0 750.0
xx
xx
xx
(Continued)
Voffset
(mV)X X VO5 VO4 VO3 VO2 VO1 VO0
1 1 0 0 0 1 612.5
1 1 0 0 1 0 625.0
1 1 0 1 0 0 650.0
1 1 0 1 0 1 662.5
1 1 0 1 1 1 687.5
1 1 1 0 0 0 700.0
1 1 1 0 1 0 725.0
1 1 1 0 1 1 737.5
1 1 1 1 0 1 762.5
1 1 1 1 1 0 775.0
1 1 1 1 1 1 787.5
30
FN6328.2
August 2, 2007

ISL6322
TABLE 9. REGISTER RGS2 (ADAPTIVE DEADTIME CONTROL/OVERVOLTAGE PROTECTION/SWITCHING FREQUENCY)
BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
xx
xx
xx
xx
xx0 0 0 1 0 0 PHASE DETECT DEFAULT +30%
xx
xx
xx0 0 1 0 1 0 PHASE DETECT ALTERNATE -30%
xx
xx
xx0 1 0 0 0 0 LGATE DETECT DEFAULT NOMINAL
xx
xx
xx0 1 0 0 1 1 LGATE DETECT DEFAULT +15%
xx
xx
xx
xx0 1 1 0 1 0 LGATE DETECT ALTERNATE -30%
xx
xx
NOTE: It is recommended that frequency shifts occur in 15% increments only.
0 0 0 0 0 0 PHASE DETECT DEFAULT NOMINAL
0 0 0 0 0 1 PHASE DETECT DEFAULT -15%
0 0 0 0 1 0 PHASE DETECT DEFAULT -30%
0 0 0 0 1 1 PHASE DETECT DEFAULT +15%
0 0 1 0 0 0 PHASE DETECT ALTERNATE NOMINAL
0 0 1 0 0 1 PHASE DETECT ALTERNATE -15%
0 0 1 0 1 1 PHASE DETECT ALTERNATE +15%
0 0 1 1 0 0 PHASE DETECT ALTERNATE +30%
0 1 0 0 0 1 LGATE DETECT DEFAULT -15%
0 1 0 0 1 0 LGATE DETECT DEFAULT -30%
0 1 0 1 0 0 LGATE DETECT DEFAULT +30%
0 1 1 0 0 0 LGATE DETECT ALTERNATE NOMINAL
0 1 1 0 0 1 LGATE DETECT ALTERNATE -15%
0 1 1 0 1 1 LGATE DETECT ALTERNATE +15%
0 1 1 1 0 0 LGATE DETECT ALTERNATE +30%
ADAPTIVE DEADTIME
CONTROL
OVERVOLTAGE
PROTECTION LEVEL
SWITCHING
FREQUENCYXXDT1DT0OVPFS2FS1FS0
General Design Guide
This section is intended to provide a high-level explanation of
the steps necessary to create a multiphase power converter. It
is assumed that the reader is familiar with many of the basic
skills and techniques referenced below. In addition to this guide,
Intersil provides complete reference designs that include
schematics, bills of materials, and example board layouts for all
common microprocessor applications.
Power Stages
The first step in designing a multiphase converter is to
determine the number of phases. This determination
depends heavily on the cost analysis, which in turn depends
on system constraints that differ from one design to the next.
Principally, the designer will be concerned with whether
components can be mounted on both sides of the circuit
board, whether through-hole components are permitted, the
total board space available for power-supply circuitry, and
the maximum amount of load current. Generally speaking,
the most economical solutions are those in which each
phase handles between 25A and 30A. All surface-mount
designs will tend toward the lower end of this current range.
If through-hole MOSFETs and inductors can be used, higher
per-phase currents are possible. In cases where board
space is the limiting constraint, current can be pushed as
high as 40A per phase, but these designs require heat sinks
and forced air to cool the MOSFET s, inductors and heatdissipating surfaces.
MOSFETS
The choice of MOSFETs depends on the current each
MOSFET will be required to conduct, the switching frequency ,
the capability of the MOSFETs to dissipate heat, and the
availability and nature of heat sinking and air flow .
LOWER MOSFET POWER CALCULATION
The calculation for power loss in the lower MOSFET is
simple, since virtually all of the loss in the lower MOSFET is
due to current conducted through the channel resistance
(r
output current, I
Equation 1), and d is the duty cycle (V
P
). In Equation 23, IM is the maximum continuous
DS(ON)
LOW 1,
is the peak-to-peak inductor current (see
PP
OUT/VIN
2
I
LPP,
------------------------------------ -+⋅=
12
r
DS ON()
2
⎛⎞
I
M
⎜⎟
----- N
⎝⎠
1d–()⋅
).
1d–()⋅
(EQ. 23)
31
FN6328.2
August 2, 2007
ISL6322
An additional term can be added to the lower-MOSFET loss
equation to account for additional loss accrued during the
dead time when inductor current is flowing through the
lower-MOSFET body diode. This term is dependent on the
diode forward voltage at I
frequency, f
, and the length of dead times, td1 and td2, at
S
, V
M
, the switching
D(ON)
the beginning and the end of the lower-MOSFET conduction
interval respectively.
P
LOW 2,
V
DON()fS
I
⎛⎞
M
⋅⋅=
⎜⎟
------
⎝⎠
N
I
PP
----------+
2
⎛⎞
I
⎜⎟
M
td1⋅
------
–
⎜⎟
N
⎝⎠
I
PP
----------
(EQ. 24)
td2⋅+
2
The total maximum power dissipated in each lower MOSFET
is approximated by the summation of P
LOW,1
and P
LOW,2
.
UPPER MOSFET POWER CALCULATION
In addition to r
losses, a large portion of the
DS(ON)
upper-MOSFET losses are due to currents conducted
across the input voltage (V
) during switching. Since a
IN
substantially higher portion of the upper-MOSFET losses are
dependent on switching frequency, the power calculation is
more complex. Upper MOSFET losses can be divided into
separate components involving the upper-MOSFET
switching times, the lower-MOSFET body-diode
reverse-recovery charge, Q
r
conduction loss.
DS(ON)
, and the upper MOSFET
rr
When the upper MOSFET turns off, the lower MOSFET does
not conduct any portion of the inductor current until the
voltage at the phase node falls below ground. Once the
lower MOSFET begins conducting, the current in the upper
MOSFET falls to zero as the current in the lower MOSFET
ramps up to assume the full inductor current. In Equation 25,
the required time for this commutation is t
approximated associated power loss is P
t
I
P
UP 1,VIN
I
M
⎛⎞
⋅⋅⋅≈
----- -
⎝⎠
N
⎛⎞
1
PP
-------- -+
2
----
⎜⎟
2
⎝⎠
f
S
and the
1
.
UP,1
(EQ. 25)
At turn on, the upper MOSFET begins to conduct and this
transition occurs over a time t
approximate power loss is P
I
I
⎛⎞
PP
M
P
UP 2,VIN
⋅⋅⋅≈
-------- -
⎜⎟
–
----- 2
N
⎝⎠
. In Equation 26, the
2
.
UP,2
t
⎛⎞
2
f
----
⎜⎟
S
2
⎝⎠
(EQ. 26)
A third component involves the lower MOSFET
reverse-recovery charge, Qrr. Since the inductor current has
fully commutated to the upper MOSFET before the
lower-MOSFET body diode can recover all of Q
, it is
rr
conducted through the upper MOSFET across VIN. The
power dissipated as a result is P
VINQrrf
P
UP 3,
⋅⋅=
S
UP,3
.
(EQ. 27)
Finally, the resistive part of the upper MOSFET is given in
Equation 28 as P
UP,4
.
2
2
I
⎛⎞
I
PP
P
UP 4,rDS ON()
d
M
⎜⎟
----- N
⎝⎠
+⋅⋅≈
---------12
(EQ. 28)
The total power dissipated by the upper MOSFET at full load
can now be approximated as the summation of the results from
Equations 25, 26, 27 and 28. Since the power equations
depend on MOSFET parameters, choosing the correct
MOSFETs can be an iterative process involving repetitive
solutions to the loss equations for different MOSFETs and
different switching frequencies.
Package Power Dissipation
When choosing MOSFETs it is important to consider the
amount of power being dissipated in the integrated drivers
located in the controller. Since there are a total of three drivers
in the controller package, the total power dissipated by all three
drivers must be less than the maximum allowabl e power
dissipation for the QFN package.
Calculating the power dissipation in the drivers for a desired
application is critical to ensure safe operation. Exceeding the
maximum allowable power dissipation level will push the IC
beyond the maximum recommended operating junction
temperature of +125°C. The maximum allowable IC power
dissipation for the 7x7 QFN package is approximately 3.5W at
room temperature. See “Layout Considerations” on page 38 for
thermal transfer improvement suggestions.
When designing the ISL6322 into an application, it is
recommended that the following calculation is used to ensure
safe operation at the desired frequency for the selected
MOSFETs. The total gate drive power losses, P
the gate charge of MOSFETs and the integrated driver’s
internal circuitry and their corresponding average driver current
can be estimated with Equations 29 and 30, respectively .
P
Qg_TOTPQg_Q1PQg_Q2IQ
3
P
Qg_Q1
P
Qg_Q2QG2
I
DR
-- -
2
3
⎛⎞
-- -
⋅ QG2NQ2⋅+
Q
⎝⎠
2
In Equations 29 and 30, P
power loss and P
the gate charge (Q
PVCC FSWNQ1N
⋅⋅ ⋅⋅⋅=
Q
G1
PVCC FSWNQ2N
⋅⋅⋅⋅=
N⋅
G1
Q1
Qg_Q1
is the total lower gate drive power loss;
Qg_Q2
and QG2) is defined at the particular gate
G1
VCC⋅++=
PHASE
PHASE
N
PHASEFSWIQ
is the total upper gate drive
to source drive voltage PVCC in the corresponding MOSFET
data sheet; I
at both drive outputs; N
is the driver total quiescent current with no load
Q
Q1
and N
are the number of upper
Q2
and lower MOSFETs per phase, respectively; N
number of active phases. The I
VCC product is the quiescent
Q*
power of the controller without capacitive load and is typically
75mW at 300kHz.
Qg_TOT
+⋅⋅=
PHASE
, due to
(EQ. 29)
(EQ. 30)
is the
32
FN6328.2
August 2, 2007
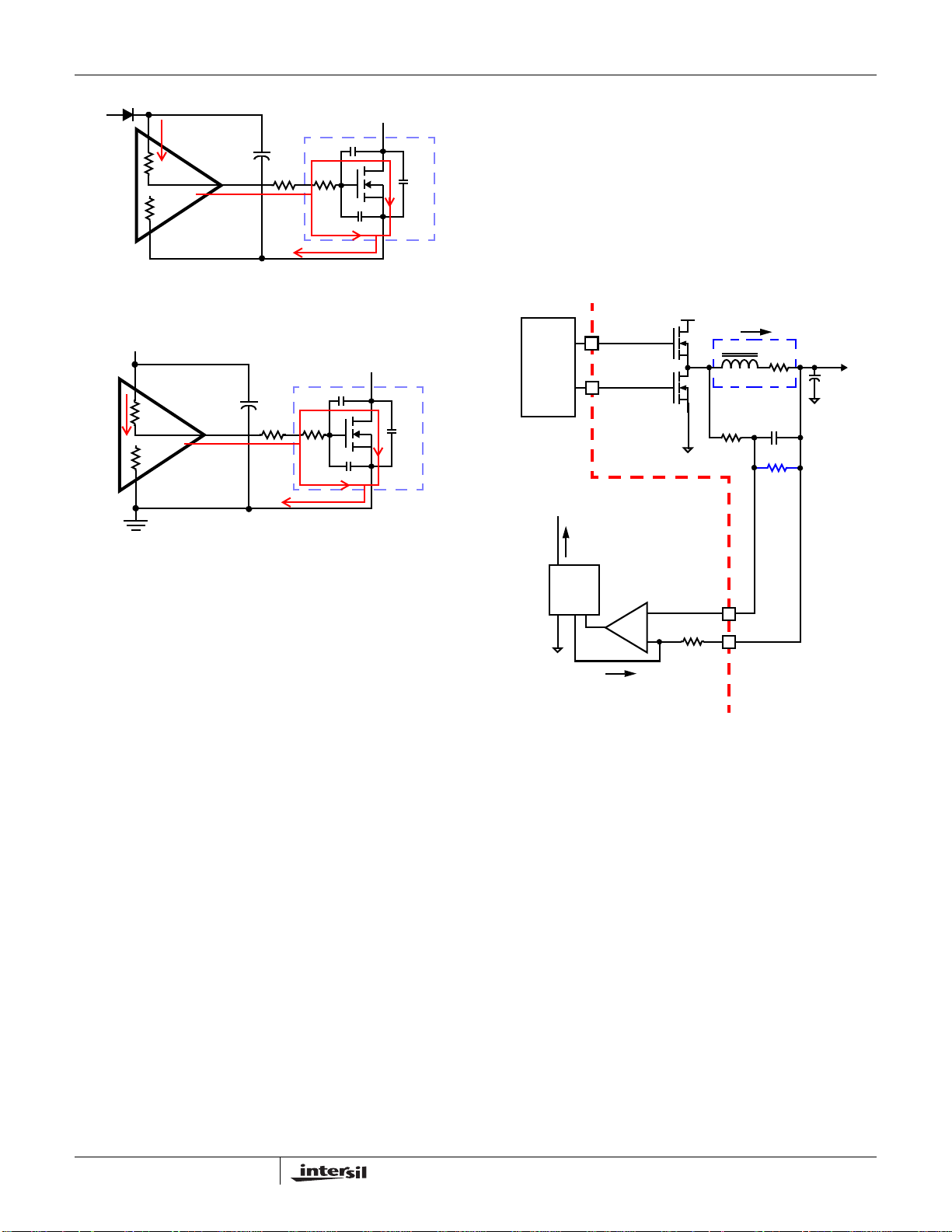
ISL6322
PVCC
BOOT
PHASE
D
C
GD
R
HI1
R
LO1
UGATE
G
R
GI1
R
G1
C
GS
S
Q1
C
DS
FIGURE 19. TYPICAL UPPER-GATE DRIVE TURN-ON PATH
PVCC
D
C
GD
R
HI2
R
LO2
LGATE
G2
G
R
GI2R
C
GS
S
Q2
C
DS
FIGURE 20. TYPICAL LOWER-GATE DRIVE TURN-ON PATH
Inductor DCR Current Sensing Component
Selection
The ISL6322 senses each individual channel’s inductor
current by detecting the voltage across the output inductor
DCR of that channel (as described in “Continuous Current
Sampling” on page 13). As Figure 21 illustrates, an R-C
network is required to accurately sense the inductor DCR
voltage and convert this information into a current, which is
proportional to the total output current. The time constant of
this R-C network must match the time constant of the
inductor L/DCR.
V
UGATE(n)
MOSFET
DRIVER
ISL6322 INTERNAL CIRCUIT
LGATE(n)
In
IN
I
L
L
DCR
INDUCTOR
VL(s)
+
VC(s)
+
R
1
R
V
OUT
C
-
C
1
2*
OUT
-
The total gate drive power losses are dissipated among the
resistive components along the transition path and in the
bootstrap diode. The portion of the total power dissipated in
the controller itself is the power dissipated in the upper drive
path resistance, P
P
, and in the boot strap diode, P
DR_UP
P
DRPDR_UPPDR_LOW PBOOTIQ
P
Qg_Q1
P
BOOT
P
DR_UP
P
DR_LOW
R
EXT1RG1
---------------------
=
3
R
⎛⎞
--------------------------------------
⎜⎟
R
⎝⎠
HI1REXT1
⎛⎞
--------------------------------------
⎜⎟
R
⎝⎠
HI2REXT2
R
-------------
+=
N
, the lower drive path resistance,
DR_UP
BOOT
HI1
+
R
GI1
Q1
HI2
+
R
LO1
----------------------------------------
+
R
+
LO1REXT1
R
LO2
----------------------------------------
+
R
+
LO2REXT2
R
EXT2RG2
.
VCC⋅()+++=
P
Qg_Q1
---------------------
⋅=
P
---------------------
⋅=
R
-------------
+=
N
(EQ. 31)
3
Qg_Q2
2
GI2
Q2
The rest of the power will be dissipated by the external gate
resistors (R
(R
and R
GI1
and RG2) and the internal gate resistors
G1
) of the MOSFETs. Figures 19 and 20 show
GI2
the typical upper and lower gate drives turn-on transition
path. The total power dissipation in the controller itself, P
DR
can be roughly estimated with Equation 31.
SAMPLE
I
SEN
+
+
VC(s)
-
R
ISEN
-
ISEN-(n)
ISEN+(n)
*R2 is OPTIONAL
FIGURE 21. DCR SENSING CONFIGURATION
The R-C network across the inductor also sets the
overcurrent trip threshold for the regulator. Before the R-C
components can be selected, the desired overcurrent
protection level should be chosen. The minimum overcurrent
trip threshold the controller can support is dictated by the
DCR of the inductors and the number of active channels. To
calculate the minimum overcurrent trip level, I
OCP,min
, use
Equation 32, where N is the number of active channels, and
DCR is the individual inductor’s DCR.
I
OCP min,
0.0375 N⋅
-------------------------- -
=
DCR
(EQ. 32)
The overcurrent trip level of the ISL6322 cannot be set any
lower then the I
OCP,min
level calculated above. If the
minimum overcurrent trip level is desired, do the
,
following steps to choose the component values for the
R-C current sensing network:
1. Choose an arbitrary value fo r C
. The recommended
1
value is 0.1µF.
33
FN6328.2
August 2, 2007
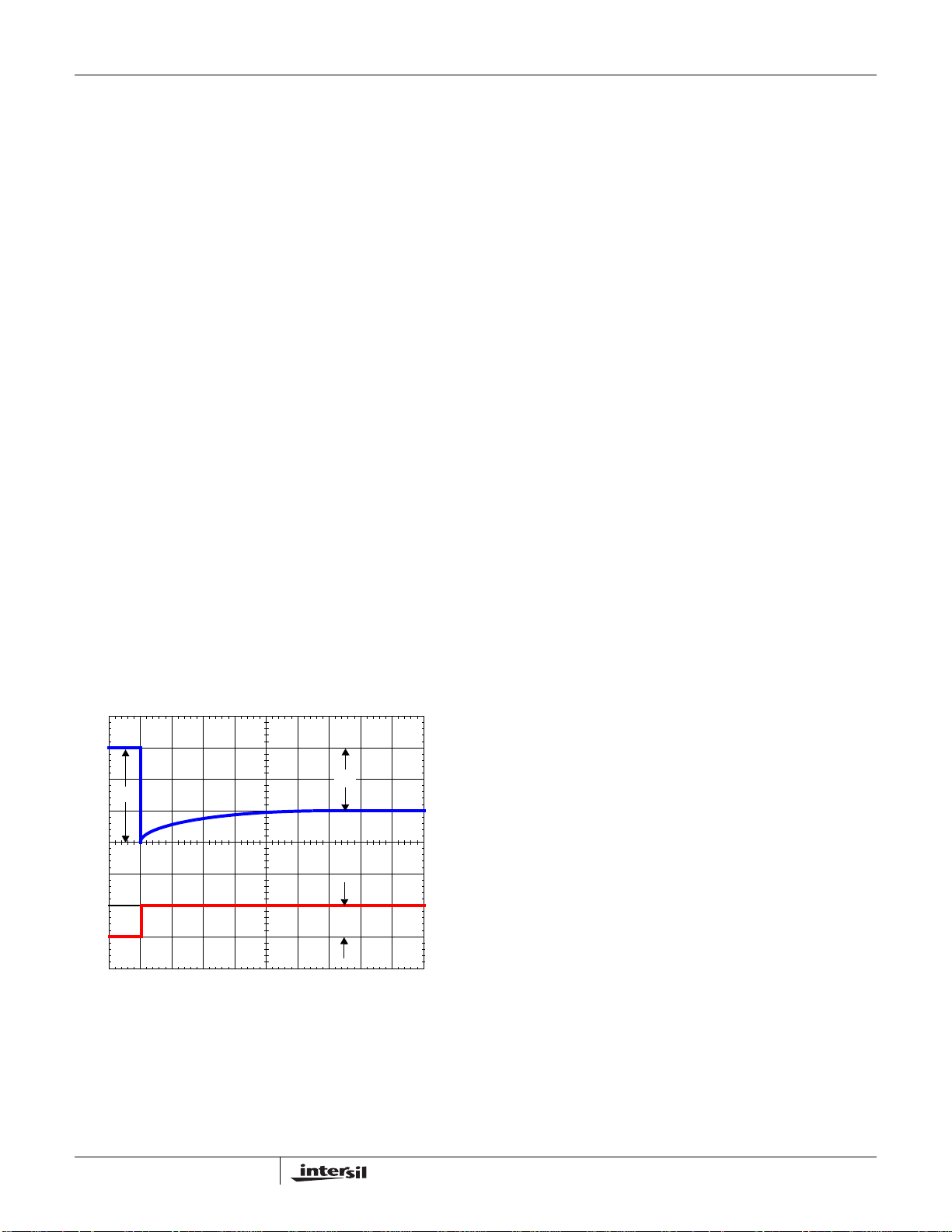
ISL6322
2. Plug the inductor L and DCR component values, and the
value for C1 chosen in step 1, into Equation 33 to
calculate the value for R1.
-------------------------
R
=
1
DCR C
3. Resistor R
L
⋅
1
should be left unpopulated.
2
I
If the desired overcurrent trip level, I
minimum overcurrent trip level, I
OCP,min
=
OCPIOCP min,
, is greater than the
OCP
, then a resistor
(EQ. 33)
divider R-C circuit should be used to set the desired trip
level. Do the following steps to choose the component
values for the resistor divider R-C current sensing
network:
1. Choose an arbitrary value for C
. The recommended
1
value is 0.1μF.
2. Plug the inductor L and DCR component values, the
value for C1 chosen in step 1, the number of active
channels N, and the desired overcurrent protection level
into Equations 34 and 35 to calculate the values for
I
OCP
R1 and R2.
LI
⋅
1
R
2
0.0375 N⋅⋅
C
1
LI
⋅
----------------------------------------------------------------------------------
=
C
1IOCP
OCP
DCR 0.0375 N⋅–⋅()⋅
OCP
---------------------------------------
R
=
I
>
OCPIOCP min,
(EQ. 34)
(EQ. 35)
Due to errors in the inductance or DCR, it may be necessary
to adjust the value of R1 and R2 to match the time constants
correctly. The ef fects of time constant mismatch can be seen
in the form of droop overshoot or undershoot during the
initial load transient spike, as shown in Figure 22. Do the
following steps to ensure the R-C and inductor L/DCR
time constants are matched accurately.
3. Select new values, R
constant resistors based on the original values, R
and R
R
1NEW,
R
2NEW,
4. Replace R
, using Equation 36 and Equation 37.
2,OLD
R
R
1
⋅=
1OLD,
⋅=
2OLD,
and R2 with the new values and check to see
1,NEW
V1Δ
----------
V
Δ
2
V1Δ
----------
V
Δ
2
and R
2,NEW
, for the time
1,OLD
(EQ. 36)
(EQ. 37)
that the error is corrected. Repeat the procedure if
necessary.
Load-line Regulation Resistor
If load-line regulation is desired, the IDROOP pin should be
shorted to the FB pin in order for the internal average
sense current to flow out across the load-line regulation
resistor, labeled R
the desired load-line required for the application. The
desired load-line, R
where V
current I
R
LL
DROOP
.
FL
V
DROOP
------------------------ -=
I
FL
Based on the desired load-line, the lo a d-line regulation
resistor, RFB, can be calculated from Equation 39 or
Equation 40, depending on the R-C current sense circuitry
being employed. If a basic R-C sense circuit consisting of C1
and R
is being used, use Equation 39. If a resistor divider
1
R-C sense circuit consisting of R
use Equation 40.
RLLN 300⋅⋅
--------------------------------- -
=
R
FB
DCR
in Figure 6. This resistor’s value sets
FB
, can be calculated by Equation 38,
LL
is the desired droop voltage at the full load
(EQ. 38)
, R2, and C1 is being used,
1
(EQ. 39)
Δ
V
Δ
V
1
FIGURE 22. TIME CONSTANT MISMATCH BEHAVIOR
2
V
OUT
I
TRAN
Δ
I
1. Capture a transient event with the oscilloscope set to
about L/DCR/2 (sec/div). For example, with L = 1µH and
DCR = 1mΩ, set the oscilloscope to 500µs/div.
2. Record ΔV1 and ΔV2 as shown in Figure 22.
34
RLLN 300 R1R2+()⋅⋅ ⋅
----------------------------------------------------------------
=
R
FB
⋅
DCR R
2
(EQ. 40)
In Equations 39 and 40:
R
is the load-line resistance,
LL
N is the number of active channels,
DCR is the DCR of the individual output inductors, and
R1 and R
are the current sense R-C resistors.
2
If no load-line regulation is required, the IDROOP pin should
be left open and not connected to anything. To choose the
value for R
in this situation, see “Compensation without
FB
Load-line Regulation” on page 36.
Compensation
The two opposing goals of compensating the voltage
regulator are stability and speed. Depending on whether the
regulator employs the optional load-line regulation as
described in “Load-Line (Droop) Regulation” on page 20,
there are two distinct methods for achieving these goals:
FN6328.2
August 2, 2007

ISL6322
“Compensation with Load-line Regulation” on page 35 and
“Compensation without Load-line Regulation” on page 36.
COMPENSATION WITH LOAD-LINE REGULATION
The load-line regulated converter behaves in a similar
manner to a peak current mode controller because the two
poles at the output filter L-C resonant frequency split with the
introduction of current information into the control loop. The
final location of these poles is determined by the system
function, the gain of the current signal, and the value of the
compensation components, R
C2 (OPTIONAL)
R
C
R
FB
FIGURE 23. COMPENSATION CONFIGURATION FOR
LOAD-LINE REGULATED ISL6322 CIRCUIT
C
C
and CC.
C
COMP
IDROOP
VDIFF
FB
ISL6322
Since the system poles and zero are affected by the values
of the components that are meant to compensate them, the
solution to the system equation becomes fairly complicated.
Fortunately, there is a simple approximation that comes very
close to an optimal solution. Treating the system as though it
were a voltage-mode regulator, by compensating the L-C
poles and the ESR zero of the voltage mode approximation,
yields a solution that is always stable with very close to ideal
transient performance.
Once selected, the compensation values in Equation 41
assure a stable converter with reasonable transient
performance. In most cases, transient performance can be
improved by making adjustments to R
value of R
while observing the transient performance on an
C
. Slowly increase the
C
oscilloscope until no further improvement is noted. Normally,
C
will not need adjustment. Keep the value of CC from the
C
case equations in Equation 41 unless some perfo rma nce
issue is noted.
1
Case 1:
Case 2:
Case 3:
------------------------------- -f
2 π LC⋅⋅⋅
R
CRFB
C
C
1
------------------------------- 2 π LC⋅⋅⋅
R
CRFB
C
C
f
0
R
CRFB
C
C
>
0
2 π f0V
--------------------------------------------------------
⋅=
0.66 V
0.66 VIN⋅
----------------------------------------------------=
⋅⋅ ⋅ ⋅
2 π V
PPRFBf0
f
-------------------------------------<≤
0
2 π C ESR⋅⋅ ⋅
VPP2 π⋅()⋅
---------------------------------------------------------------- -
⋅=
0.66 V
-------------------------------------------------------------------------------------=
2 π⋅()
------------------------------------->
2 π C ESR⋅⋅ ⋅
0.66 VIN⋅
2
2
f
VPPR
0
1
2 π f0VppL⋅⋅ ⋅ ⋅
---------------------------------------------
⋅=
0.66 V
0.66 VINESR C⋅⋅ ⋅
----------------------------------------------------------------=
2 π V
PPRFBf0
LC⋅⋅⋅ ⋅ ⋅
pp
⋅
IN
1
2
2
f
LC⋅⋅⋅
0
⋅
IN
LC⋅⋅⋅ ⋅ ⋅
FB
ESR⋅⋅
IN
L⋅⋅ ⋅ ⋅ ⋅
(EQ. 41)
Select a target bandwidth for the compensated system, f
.
0
The target bandwidth must be large enough to assure
adequate transient performance, but smaller than 1/3 of the
per-channel switching frequency. The values of the
compensation components depend on the relationships of f
to the L-C pole frequency and the ESR zero frequency. For
each of the following three, there is a separate set of
equations for the compensation components.
In Equation 41:
- L is the per-channel filter inductance divided by the
number of active channels,
- C is the sum total of all output capacitors,
- ESR is the equivalent series resistance of the bulk output
filter capacitance, and
-V
is the peak-to-peak sawtooth signal amplitude as
PP
described in the “Electrical Specifications” on page 7.
35
The optional capacitor C
, is sometimes needed to bypass
2
noise away from the PWM comparator (see Figure 23). Keep
a position available for C
0
high-frequency capacitor of between 22pF and 150pF in
, and be prepared to install a
2
case any leading edge jitter problem is noted.
FN6328.2
August 2, 2007
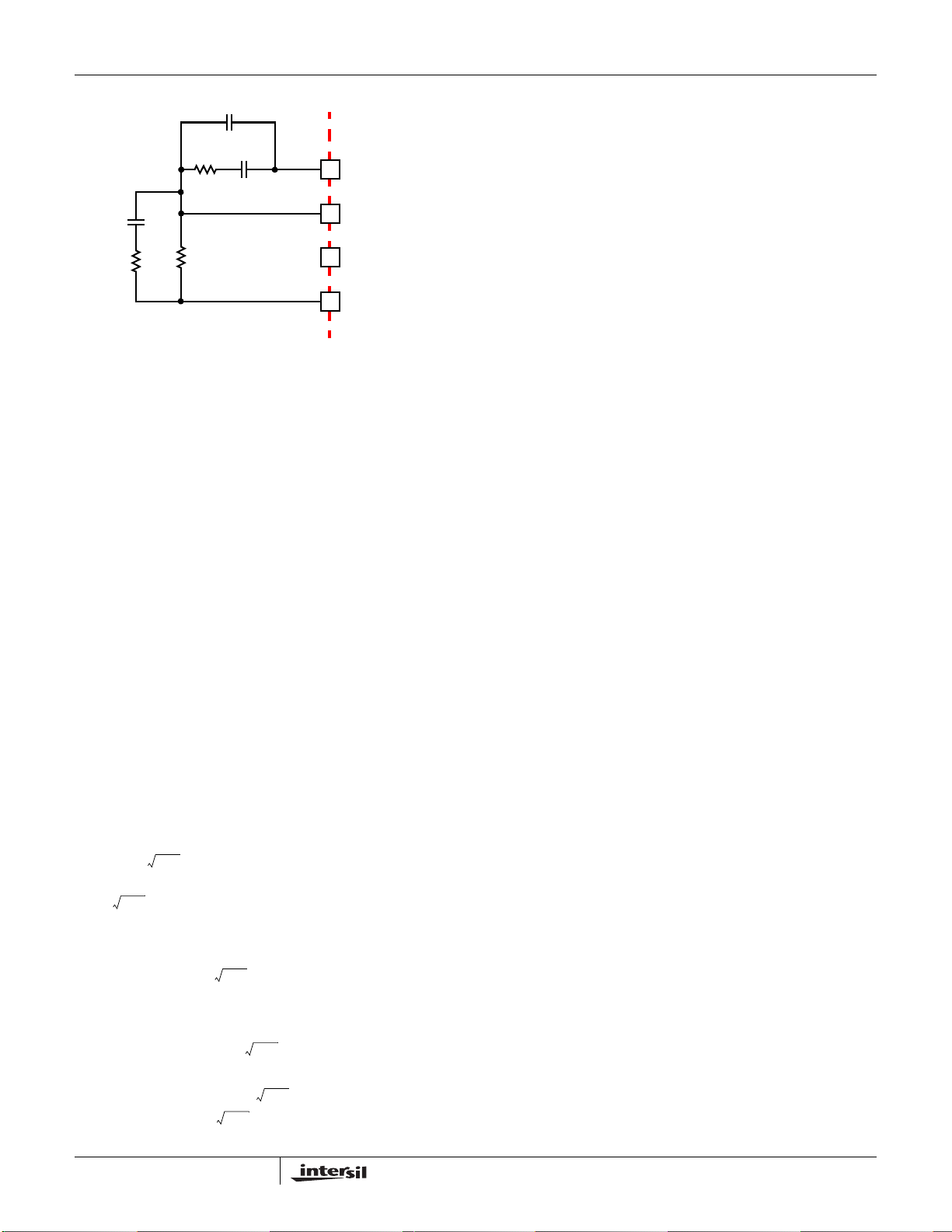
ISL6322
C
2
C
C
R
C
C
1
R
R
1
FIGURE 24. COMPENSATION CIRCUIT WITHOUT LOAD-LINE
FB
REGULATION
COMP
FB
ISL6322
IDROOP
VDIFF
COMPENSATION WITHOUT LOAD-LINE REGULATION
The non load-line regulated converter is accurately modeled
as a voltage-mode regulator with two poles at the L-C
resonant frequency and a zero at the ESR frequency. A
type III controller, as shown in Figure 24, provides the
necessary compensation.
The first step is to choose the desired bandwidth, f
, of the
0
compensated system. Choose a frequency high enough to
assure adequate transient performance but not higher than
1/3 of the switching frequency. The type-III compensator has
an extra high-frequency pole, f
. This pole can be used for
HF
added noise rejection or to assure adequate attenuation at
the error-amplifier high-order pole and zero frequencies. A
good general rule is to choose f
higher if desired. Choosing f
= 10f0, but it can be
HF
to be lower than 10f0 can
HF
cause problems with too much phase shift below the system
bandwidth.
In the solutions to the compensation equations, there is a
single degree of freedom. For the solutions presented in
Equation 42, R
is selected arbitrarily. The remaining
FB
compensation components are then selected according to
Equation 42.
CESR⋅
--------------------------------------------
FB
⋅=
LC⋅ C ESR⋅–
R1R
In Equation 42, L is the per-channel filter inductance divided
by the number of active channels; C is the sum total of all
output capacitors; ESR is the equivalent-series resistance of
the bulk output-filter capacitance; and V
PP
is the
peak-to-peak sawtooth signal amplitude as described in
“Electrical Specifications” on page 7 .
Output Filter Design
The output inductors and the output capacitor bank together
to form a low-pass filter responsible for smoothing the
pulsating voltage at the phase nodes. The output filter also
must provide the transient energy until the regulator can
respond. Because it has a low bandwidth compared to the
switching frequency, the output filter limits the system
transient response. The output capacitors must supply or
sink load current while the current in the output inductors
increases or decreases to meet the demand.
In high-speed converters, the output capacitor bank is usually
the most costly (and often the largest) p art of the circuit.
Output filter design begins with minimizing the cost of this part
of the circuit. The critical load parameters in choosing the
output capacitors are the maximum size of the load step, ΔI,
the load-current slew rate, di/dt, and the maximum allowable
output-voltage deviation under transient loading, ΔV
Capacitors are characterized according to their capacitance ,
ESR, and ESL (equivalent series inductance).
At the beginning of the load transient, the output capacitors
supply all of the transient current. The output voltage will
initially deviate by an amount approximated by the voltage
drop across the ESL. As the load current increases, the
voltage drop across the ESR increases linearly until the load
current reaches its final value. The capacitors selected must
have sufficiently low ESL and ESR so that the total
output-voltage deviation is less than the allowable maximum.
Neglecting the contribution of inductor current and regulator
response, the output voltage initially deviates by the amount
specified in Equation 43.
di
ΔVESL
-----
⋅ ESR ΔI⋅+≈
dt
MAX
(EQ. 43)
.
C
C
R
C
LC⋅ C ESR⋅–
--------------------------------------------=
1
----------------------------------------------------------------------------------------------------=
2
2 π⋅()
V
PP
---------------------------------------------------------------------------------------- -=
C
0.75 V
0.75 VIN2 π f
----------------------------------------------------------------------------------------------------=
C
2 π⋅()
R
FB
0.75 VIN⋅
2
f0f
⋅⋅ ⋅ ⋅ ⋅
2
⎛⎞
2π
⋅
⎝⎠
IN
2
f0f
⋅⋅ ⋅ ⋅ ⋅
LC⋅()RFBV
HF
f0fHFLCR
⋅⋅ ⋅⋅⋅
2 π f
HF
LC⋅ 1–⋅⋅ ⋅()⋅⋅
HF
LC⋅ 1–⋅⋅ ⋅()⋅⋅
HF
LC⋅()RFBV
36
FB
PP
PP
(EQ. 42)
The filter capacitor must have sufficiently low ESL and ESR
so that ΔV < ΔV
MAX
.
Most capacitor solutions rely on a mixture of high-frequency
capacitors with relatively low capacitance in combination
with bulk capacitors having high capacitance but limited
high-frequency performance. Minimizing the ESL of the
high-frequency capacitors allows them to support the output
voltage as the current increases. Minimizing the ESR of the
bulk capacitors allows them to supply the increased current
with less output voltage deviation.
FN6328.2
August 2, 2007

ISL6322
The ESR of the bulk capacitors also creates the majority of
the output-voltage ripple. As the bulk capacitors sink and
source the inductor ac ripple current (see “Interleaving” on
page 11 and Equation 2), a voltage develops across the bulk
capacitor ESR equal to I
(ESR). Thus, once the output
C(P-)
capacitors are selected, the maximum allowable ripple
voltage, V
(P-P)(MAX)
, determines the lower limit on the
inductance.
⎛⎞
NV⋅
–
V
IN
L
⎝⎠
------------------------------------------------------------------- -
⋅≥
ESR
f
⋅⋅
SVINVPP–()MAX()
OUT
V
⋅
OUT
(EQ. 44)
Since the capacitors are supplying a decreasing portion of
the load current while the regulator recovers from the
transient, the capacitor voltage becomes slightly depleted.
The output inductors must be capable of assuming the entire
load current before the output voltage decreases more than
ΔV
. This places an upper limit on inductance.
MAX
Equation 45 gives the upper limit on L for the cases when
the trailing edge of the current transient causes a greater
output-voltage deviation than the leading edge. Equation 46
addresses the leading edge. Normally, the trailing edge
dictates the selection of L because duty cycles are usually
less than 50%. Nevertheless, both inequalities should be
evaluated, and L should be selected based on the lower of
the two results. In each equation:
L is the per-channel inductance,
C is the total output capacitance, and
N is the number of active channels.
2NCV
⋅⋅⋅
---------------------------------
L
1.25
-----------------------------
L
()
ΔI
NC⋅⋅
2
()
ΔI
O
ΔV
2
⋅⋅≤
ΔV
MAX
ΔIESR⋅()–⋅≤
MAX
ΔI ESR⋅()– VINVO–
⎛⎞
⎝⎠
(EQ. 45)
(EQ. 46)
Switching Frequency
There are a number of variables to consider when choosing
the switching frequency, as there are considerable effects on
the upper MOSFET loss calculation. These effects are
outlined in “MOSFETs” on page 31, and they establish the
upper limit for the switching frequency. The lower limit is
established by the requirement for fast transient response
and small output-voltage ripple as outlined in “Compensation
without Load-line Regulation” on page 36. Choose the
lowest switching frequency that allows the regulator to meet
the transient-response requirements.
Switching frequency is determined by the selection of the
frequency-setting resistor, R
are provided to assist in selecting the correct value for R
[]
RT10
10.61 1.035 fS()log⋅()–
=
. Figure 25 and Equation 47
T
(EQ. 47)
.
T
1000
(kΩ)
100
T
R
10
10k 100k 1000k 10000k
FIGURE 25. R
SWITCHING FREQUENCY (Hz)
vs SWITCHING FREQUENCY
T
Input Capacitor Selection
The input capacitors are responsible for sourcing the ac
component of the input current flowing into the upper
MOSFETs. Their RMS current capacity must be sufficient to
handle the ac component of the current drawn by the upper
MOSFETs which is related to duty cycle and the number of
active phases.
0.3
I
= 0
L(P-P)
I
)
O
I
RMS/
0.2
0.1
INPUT-CAPACITOR CURRENT (I
FIGURE 26. NORMALIZED INPUT- CAP ACITOR RMS CURRENT
= 0.25 I
L(P-P)
0
00.4 1.00.2 0.6 0.8
O
vs DUTY CYCLE FOR 4-PHASE CONVERTER
For a four-phase design, use Figure 26 to determine the
input-capacitor RMS current requirement set by the duty
cycle, maximum sustained output current (I
of the peak-to-peak inductor current (I
bulk capacitor with a ripple current rating that will minimize
the total number of input capacitors required to support the
RMS current calculated.
The voltage rating of the capacitors should also be at least
1.25 times greater than the maximum input voltage.
Figures 27 and 28 provide the same input RMS current
information for three-phase and two-phase designs
respectively. Use the same approach for selecting the bulk
capacitor type and number.
I
L(P-P)
I
L(P-P)
DUTY CYCLE (V
= 0.5 I
= 0.75 I
O/VIN
L(P-P)
O
O
)
), and the ratio
O
) to IO. Select a
37
FN6328.2
August 2, 2007

ISL6322
spikes. Consider, as an example, the turnoff transition of the
0.3
I
= 0
(P-P)
L
)
O
I
RMS/
0.2
= 0.25 I
I
(P-P)
L
O
I
= 0.5 I
(P-P)
L
I
(P-P)
L
= 0.75 I
O
O
upper PWM MOSFET. Prior to turnoff, the upper MOSFET
was carrying channel current. During the turnoff, current
stops flowing in the upper MOSFET and is picked up by the
lower MOSFET. Any inductance in the switched current path
generates a large voltage spike during the switching interval.
Careful component selection, tight layout of the critical
components, and short, wide circuit traces minimize the
magnitude of voltage spikes.
0.1
INPUT-CAPACITOR CURRENT (I
0
00.4 1.00.2 0.6 0.8
DUTY CYCLE (V
FIGURE 27. NORMALIZED INPUT-CAPACITOR RMS
CURRENT FOR 3-PHASE CONVERTER
0.3
)
O
I
RMS/
0.2
0.1
I
= 0
(P-P)
L
= 0.5 I
I
(P-P)
L
INPUT-CAPACITOR CURRENT (I
I
(P-P)
L
0
00.4 1.00.2 0.6 0.8
FIGURE 28. NORMALIZED INPUT-CAPACITOR RMS
O
= 0.75 I
O
DUTY CYCLE (V
CURRENT FOR 2-PHASE CONVERTER
IN/VO
IN/VO
)
)
Low capacitance, high-frequency ceramic cap acitors are
needed in addition to the input bulk capacitors to suppress
leading and falling edge voltage spikes. The spikes result from
the high current slew rate produced by the upper MOSFET
turn on and off. Select low ESL ceramic capacitors and place
one as close as possible to each upper MOSFET drain to
minimize board parasitics and maximize suppression.
Layout Considerations
MOSFETs switch very fast and efficiently. The speed with
which the current transitions from one device to another
causes voltage spikes across the interconnecting
impedances and parasitic circuit elements. These voltage
spikes can degrade efficiency, radiate noise into the circuit
and lead to device overvoltage stress. Careful component
selection, layout, and placement minimizes these voltage
There are two sets of critical components in a DC/DC
converter using an ISL6322 controller. The power
components are the most critical because they switch large
amounts of energy. Next are small signal components that
connect to sensitive nodes or supply critical bypassing
current and signal coupling.
The power components should be placed first, which include
the MOSFET s, input and output capacitors, and the inductors. It
is important to have a symmetrical layout for each power train,
preferably with the controller located equidistant from each.
Symmetrical layout allows heat to be dissipated equally
across all power trains. Equidistant placement of the controller
to the first three power trains it controls through the integrated
drivers helps keep the gate drive traces equally short,
resulting in equal trace impedances and similar drive
capability of all sets of MOSFETs.
When placing the MOSFETs, try to keep the source of the
upper FETs and the drain of the lower FETs as close as
thermally possible. Input Bulk capacitors should be placed
close to the drain of the upper FETs and the source of the lower
FETs. Locate the output inductors and output capacitors
between the MOSFET s and the load. The high-frequency input
and output decoupling capacitors (ceramic) should be placed
as close as practicable to the decoupling target, making use of
the shortest connection paths to any internal planes, such as
vias to GND next or on the capacitor solder pad.
The critical small components include the bypass capacitors
for VCC and PVCC, and many of the components
surrounding the controller including the feedback netwo r k
and current sense components. Locate the VCC/PVCC
bypass capacitors as close to the ISL6322 as possible. It is
especially important to locate the components associated
with the feedback circuit close to their respective controller
pins, since they belong to a high-impedance circuit loop,
sensitive to EMI pick-up.
A multi-layer printed circuit board is recommended. Figure 29
shows the connections of the critical components for the
converter. Note that capacitors C
xxIN
and C
xxOUT
could each
represent numerous physical capacitors. Dedicate one solid
layer, usually the one underneath the component side of the
board, for a ground plane and make all critical component
ground connections with vias to this layer. Dedicate another
solid layer as a power plane and break this plane into smaller
islands of common voltage levels. Keep the metal runs from the
38
FN6328.2
August 2, 2007
ISL6322
PHASE terminal to output inductors short. The power plane
should support the input power and output power nodes. Use
copper filled polygons on the top and bottom circuit layers for
the phase nodes. Use the remaining printed circuit layers for
small signal wiring.
Routing UGATE, LGATE, and PHASE Traces
Great attention should be paid to routing the UGATE, LGATE,
and PHASE traces since they drive the power train MOSFETs
using short, high current pulses. It is important to size them as
large and as short as possible to reduce their overall
impedance and inductance. They should be sized to carry at
least one ampere of current (0.02” t o 0 . 0 5 ” ) . G o i n g b e t w e e n
layers with vias should also be avoided, but if so, use two vias
for interconnection when possible.
Extra care should be given to the LGATE traces in particular
since keeping their impedance and inductance low help s to
significantly reduce the possibility of shoot-through. It is also
important to route each channels UGATE and PHASE traces
in as close proximity as possible to reduce their inductances.
Current Sense Component Placement and Trace
Routing
One of the most critical aspects of the ISL6322 regulator
layout is the placement of the inductor DCR current sense
components and traces. The R-C current sense components
must be placed as close to their respective ISEN+ and
ISEN- pins on the ISL6322 as possible.
The sense traces that connect the R-C sense components to
each side of the output inductors should be routed on the
bottom of the board, away from the noisy switching
components located on the top of the board. These traces
should be routed side by side, and they should be very thin
traces. It’s important to route these traces as far away from
any other noisy traces or planes as possible. These traces
should pick up as little noise as possible.
Thermal Management
For maximum thermal performance in high current, high
switching frequency applications, connecting the thermal
GND pad of the ISL6322 to the ground plane with multiple
vias is recommended. This heat spreading allows the part to
achieve its full thermal potential. It is also recommended
that the controller be placed in a direct path of airflow if
possible to help thermally manage the part.
All Intersil U.S. products are manufactured, assembled and tested utilizing ISO9000 quality systems.
Intersil Corporation’s quality certifications can be viewed at www.intersil.com/design/quality
Intersil products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design, software and/or specifications at any time without
notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and
reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result
from its use. No license is granted by implicat ion or oth erwise u nde r any p a tent or p at ent r ights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see www.intersil.com
39
FN6328.2
August 2, 2007
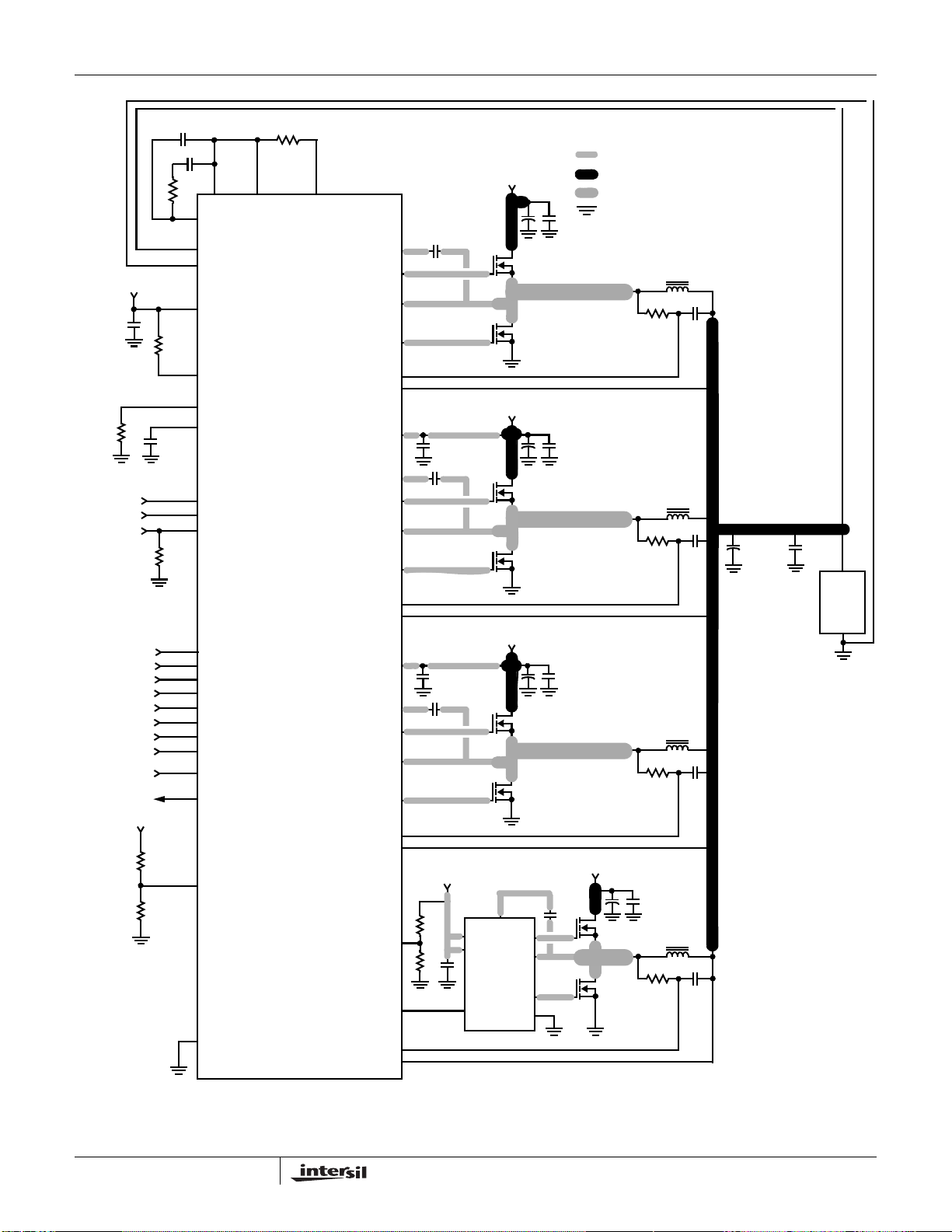
ISL6322
(CF1)
R
T
+5V
C
R
OFS
REF
R
SS
C
2
C
R
1
1
FB
COMP
VSEN
RGND
VCC
OFS
FS
REF
SCL
SDA
SS / RST / A0
IDROOP
R
FB
LOCATE CLOSE TO IC
(MINIMIZE CONNECTION PATH)
KEY
HEAVY TRACE ON CIRCUIT PLANE LAYER
ISLAND ON POWER PLANE LAYER
ISLAND ON CIRCUIT PLANE LAYER
VIA CONNECTION TO GROUND PLANE
C
BIN1
LOCATE NEAR SWITCHING TRANSISTORS;
(MINIMIZE CONNECTION PATH)
R
C
1
1
C
BIN2
R
C
1
1
(C
HFOUT
C
)
BOUT
VDIFF
BOOT1
UGATE1
PHASE1
LGATE1
ISEN1ISEN1+
PVCC1_2
BOOT2
UGATE2
PHASE2
LGATE2
C
BOOT1
(CF2)
C
BOOT2
+12V
+12V
+12V
ISL6322
VID7
VID6
VID5
VID4
VID3
VID2
VID1
VID0
VRSEL
PGOOD
R
EN1
EN
R
EN2
ISEN2-
ISEN2+
PVCC3
BOOT3
UGATE3
PHASE3
LGATE3
ISEN3-
ISEN3+
EN_PH4
(CF2)
C
BOOT3
+12V
VCC
PVCC
+12V
BOOT
UGATE
PHASE
C
BIN3
+12V
C
R
1
BIN4
LOCATE NEAR LOAD;
(MINIMIZE CONNECTION
C
1
PATH)
LOAD
ISL6612
R
C
1
1
GND
PWM4
ISEN4-
ISEN4+
PWM
LGATE
GND
FIGURE 29. PRINTED CIRCUIT BOARD POWER PLANES AND ISLANDS
40
FN6328.2
August 2, 2007
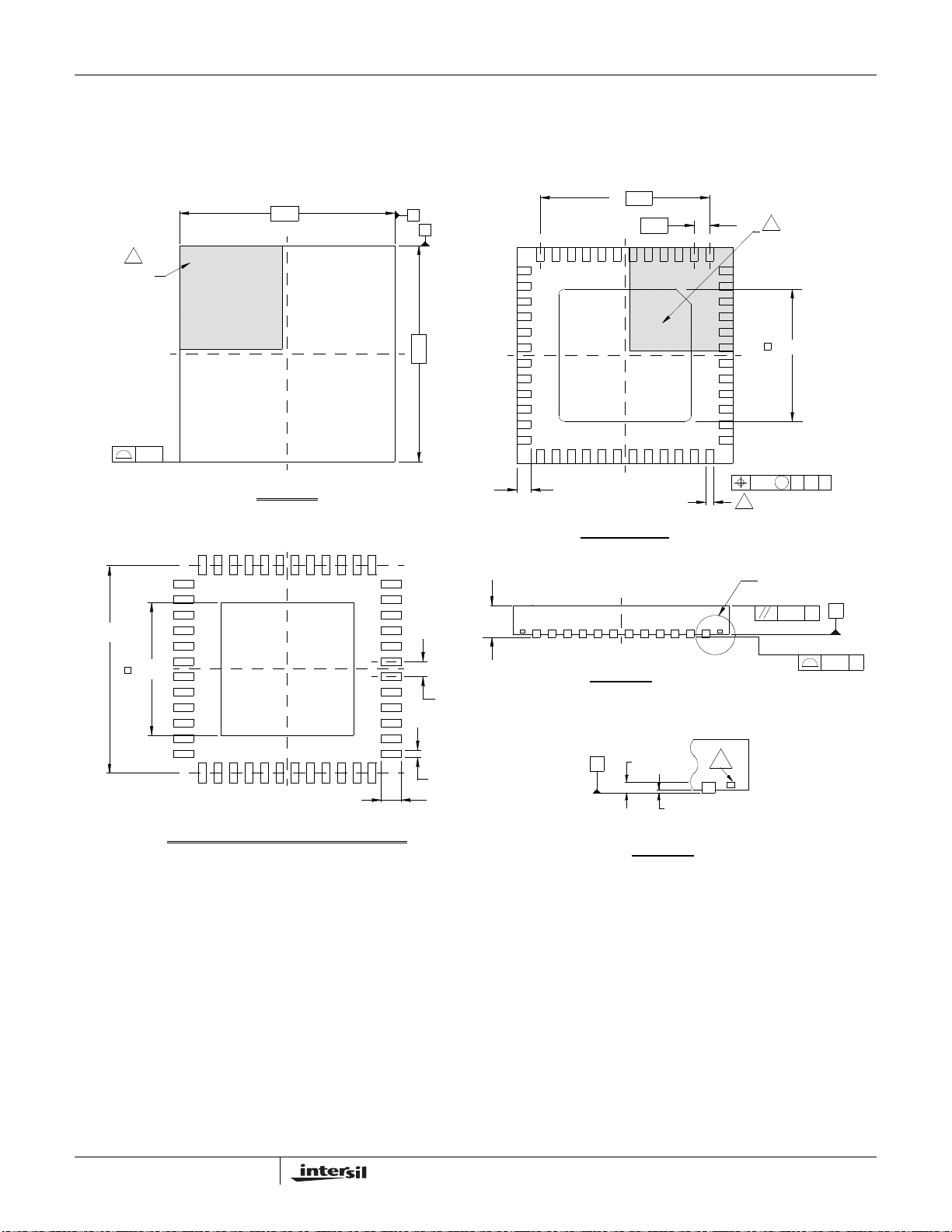
Package Outline Drawing
L48.7x7
48 LEAD QUAD FLAT NO-LEAD PLASTIC PACKAGE
Rev 4, 10/06
7.00
6
PIN 1
INDEX AREA
A
B
ISL6322
36
37
4X
44X
5.5
0.50
48
6
PIN #1 INDEX AREA
1
(4X) 0.15
( 6 . 80 TYP )
( 4 . 30 )
TOP VIEW
TYPICAL RECOMMENDED LAND PATTERN
7.00
0 . 90 ± 0 . 1
( 44X 0 . 5 )
( 48X 0 . 23 )
( 48X 0 . 60 )
25
24
48X 0 . 40± 0 . 1
BOTTOM VIEW
SIDE VIEW
0 . 2 REF
C
DETAIL "X"
0 . 00 MIN.
0 . 05 MAX.
12
13
4
0.23 +0.07 / -0.05
BASE PLANE
5
4. 30 ± 0 . 15
M0.10 C AB
SEE DETAIL "X"
C
C
0.10
SEATING PLANE
C0.08
41
NOTES:
Dimensions are in millimeters.1.
Dimensions in ( ) for Reference Only.
2.
Dimensioning and tolerancing conform to AMSE Y14.5m-1994.
3.
Unless otherwise specified, tolerance : Decimal ± 0.05
4.
Dimension b applies to the metallized terminal and is measured
between 0.15mm and 0.30mm from the terminal tip.
Tiebar shown (if present) is a non-functional feature.
5.
The configuration of the pin #1 identifier is optional, but must be
6.
located within the zone indicated. The pin #1 indentifier may be
either a mold or mark feature.
FN6328.2
August 2, 2007

 Loading...
Loading...