

®
ISL6556B
Data Sheet December 28, 2004
Optimized Multi-Phase PWM Controller
with 6-Bit DA C and Programmable Internal
Temperature Compensation for VR10.X
Application
The ISL6556B controls microprocessor core voltage
regulation by driving up to 4 synchronous-rectified buck
channels in parallel. Multi-phase buck converter architecture
uses interleaved timing to multiply channel ripple frequency
and reduce input and output ripple currents.
The ISL6556B utilizes r
current sensing in each
DS(ON)
phase for adaptive voltage positioning (droop), channelcurrent balancing, and overcurrent protection. To ensure the
accuracy of droop, a programmable internal temperature
compensation function is implemented to nullify the effect of
r
temperature sensitivity.
DS(ON)
A unity gain, differential amplifier is provided for remote voltage
sensing. Any potential difference between remote and local
grounds can be eliminated using the remote-sense amplifier.
The precision threshold-sensitive enable input is available to
accurately coordinate the startup of the ISL6556B with Intersil
MOSF ET driver IC. Dynamic-VID™ technology allows
seamless on-the-fly VID changes. The offset pin allow s accurate
voltage offset settings that are independent of VID setting. The
ISL6556B uses 5V bias and has a built-in shunt regulator to
allow 12V bias using only a small external limiting resistor.
Ordering Information
PART NUMBER TEMP. (°C) PACKAGE PKG. DWG. #
ISL6556BCB* 0 to 70 28 Ld SOIC M28.3
ISL6556BCBZ*
(Note)
ISL6556BCBZA
-T (Note)
ISL6556BCR* 0 to 70 32 Ld 5x5B QFN L32.5x5B
ISL6556BCRZ*
(Note)
* Add “-T” suffix for tape and reel.
0 to 70 28 Ld SOIC (Pb-free) M28.3
0 to 70 28 Ld SOIC Tape and
Reel (Pb-free)
0 to 70 32 Ld 5x5B QFN
(Pb-free)
M28.3
L32.5x5B
FN9097.4
Features
• Precision Multi-Phase Core Voltage Regulation
- Differential Remote Voltage Sensing
- ±0.5% System Accuracy Over Temperature and Life
- Adjustable Reference-Voltage Offset
• Precision r
DS(ON)
- Integrated Programmable Temperature Compensation
- Accurate Load-Line Programming
- Accurate Channel-Current Balancing
- Low-Cost, Lossless Current Sensing
• Internal Shunt Regulator for 5V or 12V Biasing
• Microprocessor Voltage Identification Input
- Dynamic VID™ Technology
- 6-Bit VID Input
- 0.8375V to 1.600V in 12.5mV Steps
• Threshold Enable Function for Precision Sequencing
• Overcurrent Protection
• Overvoltage Protection
- No Additional External Components Needed
- OVP Pin to drive optional Crowbar Device
• 2, 3, or 4 Phase Operation up to 1.5MHz per Phase
• QFN Package Option
- QFN Compliant to JEDEC PUB95 MO-220 QFN - Quad
Flat No Leads - Product Outline
- QFN Near Chip Scale Package Footprint; Improves
PCB Efficiency, Thinner in Profile
• Pb-free Available (RoHS Compliant)
Current Sensing
NOTE: Intersil Pb-free products employ special Pb-free material
sets; molding compounds/die attach materials and 100% matte tin
plate termination finish, which are RoHS compliant and compatible
with both SnPb and Pb-free sold ering operations. Intersil Pb-fre e
products are MSL classified at Pb-free peak re flow temperatures that
meet or exceed the Pb-free requirements of IPC/JEDE C J STD-020.
1
Dynamic VID™ is a trademark of Intersil Americas Inc. Copyright © Intersil Americas Inc. 2002-2004. All Rights Reserved
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
1-888-INTERSIL or 321-724-7143
| Intersil (and design) is a registered trademark of Intersil Americas Inc.
All other trademarks mentioned are the property of their respective owners.
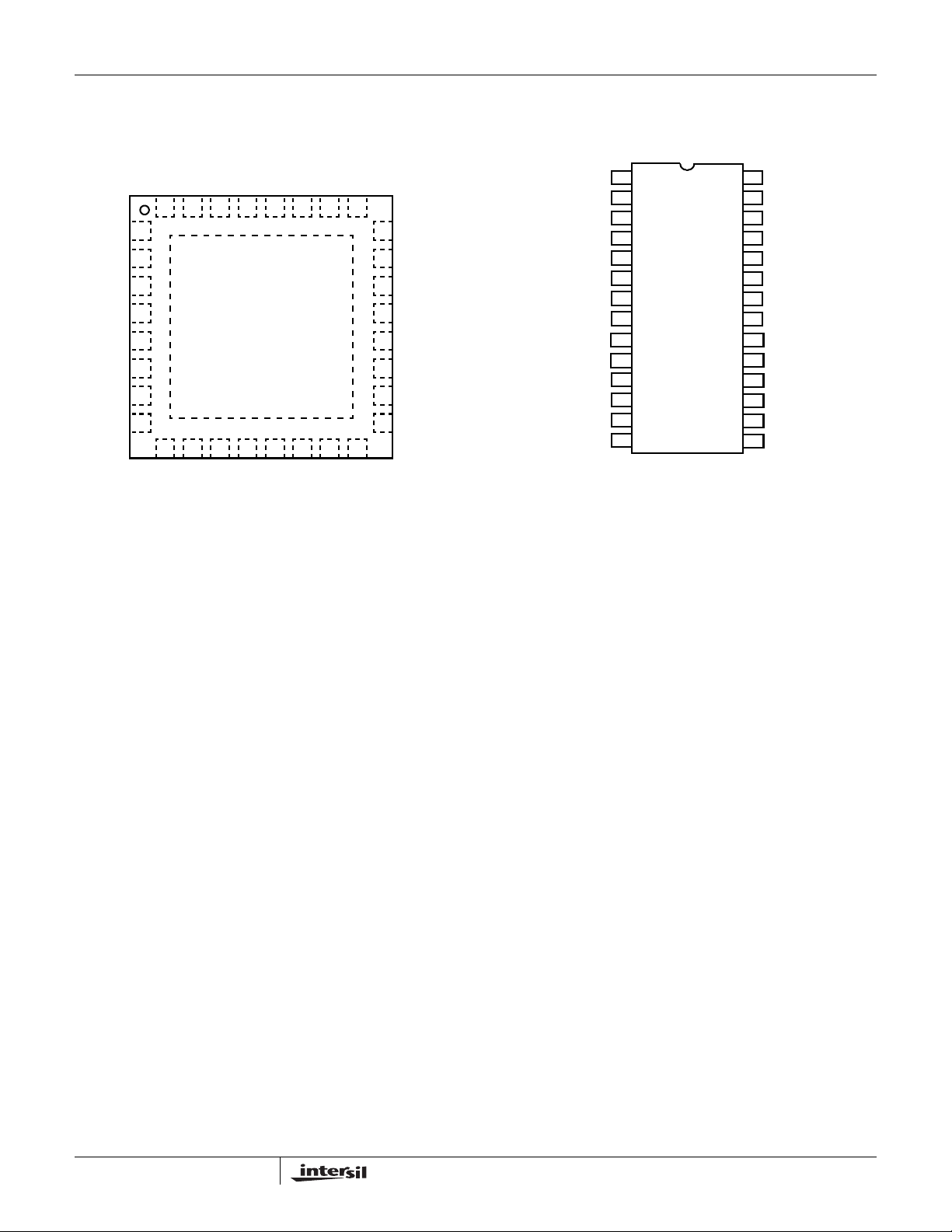
Pinouts
32 LEAD QFN
TOP VIEW
ISL6556B
28 LEAD SOIC
TOP VIEW
VID3
VID2
VID1
VID0
VID12.5
OFS
TCOMP
REF
VID4
PGOOD
OVP
FS
GND
ENLL
32 31 30 29 28 27 26 25
1
2
3
4
5
6
7
8
9 10111213141516
FB
OFSOUT
COMP
VDIFF
VSEN
RGND
EN
GND
VCC
PWM3
OVP
1
PGOOD
PWM4
24
23
ISEN4
22
ISEN2
21
PWM2
20
PWM1
19
ISEN1
18
GND
ISEN3
17
VID12.5
TCOMP
VID4
VID3
VID2
VID1
VID0
OFS
REF
FB
COMP
VDIFF
2
3
4
5
6
7
8
9
10
11
12
13
14
FS
28
27
EN
26
VCC
25
PWM4
24
ISEN4
23
ISEN2
22
PWM2
PWM1
21
ISEN1
20
ISEN3
19
PWM3
18
GND
17
16
RGND
15
VSEN
2
FN9097.4
December 28, 2004
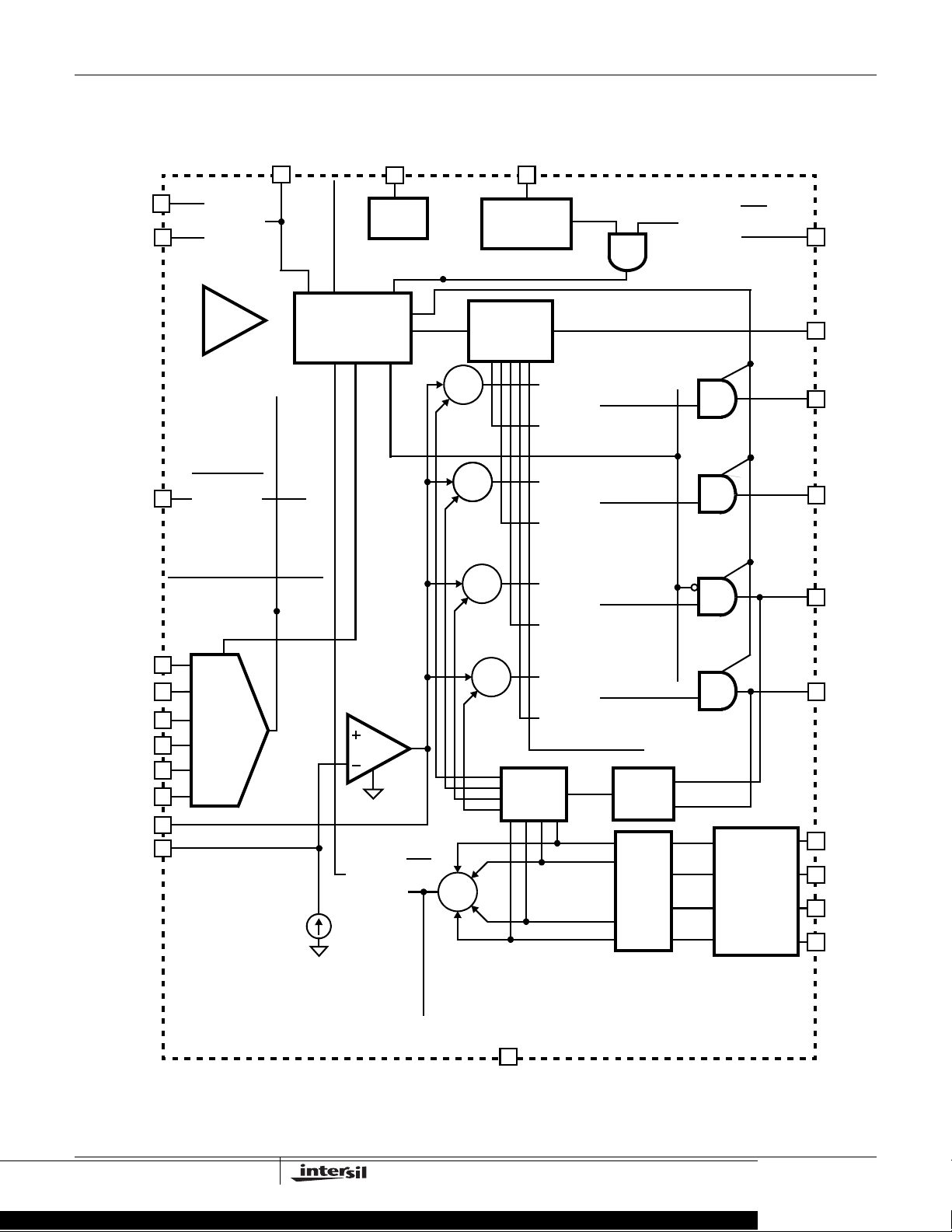
ISL6565BCB Block Diagram
ISL6556B
RGND
VSEN
OFS
OVP
VDIFF
PGOOD
SOFT-START
AND
FAULT LOG IC
OVP
OVP
S
LATCH
∑
∑
∑
VCC
POWER-ON
RESET (POR)
CLOCK AND
SAWTOOTH
GENERATOR
∑
1.24V
EN
THREE-STATE
FS
PWM1
PWM2
PWM3
VID4
VID3
VID2
VID1
VID0
VID12.5
COMP
FB
DYNAMIC
VID
D/A
I_TOT
I_TRIP
∑
∑
GND
CHANNEL
CURRENT
BALANCE
CHANNEL
DETECT
SAMPLE
&
HOLD
CHANNEL
CURRENT
SENSE
PWM4
ISEN1
ISEN2
ISEN3
ISEN4
3
FN9097.4
December 28, 2004
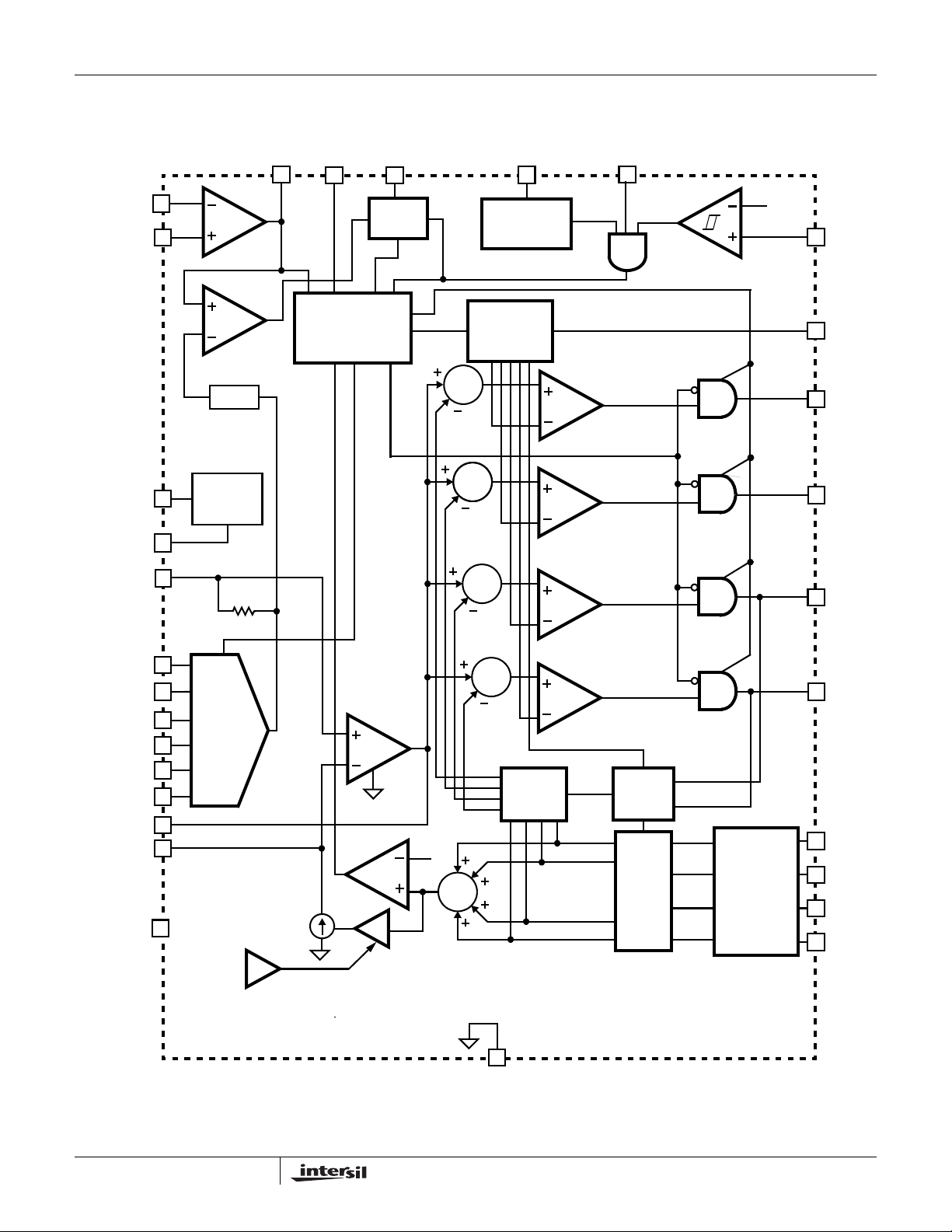
ISL6565BCR Block Diagram
ISL6556B
RGND
VSEN
OFS
OFSOUT
REF
x1
OVP
+200mV
OFFSET
VDIFF
PGOOD
SOFT-START
AND
FAULT LOG IC
OVP
OVP
S
LATCH
R
Q
VCC
POWER-ON
RESET (POR)
CLOCK AND
SAWTOOTH
GENERATOR
∑
PWM
∑
∑
PWM
∑
PWM
ENLL
1.24V
EN
THREE-STATE
FS
PWM1
PWM2
PWM3
VID4
VID3
VID2
VID1
VID0
VID12.5
COMP
FB
TCOMP
DYNAMIC
VID
D/A
∑
PWM
E/A
CHANNEL
CURRENT
BALANCE
I_TRIP
OC
∑
I_TOT
T
GND
CHANNEL
DETECT
SAMPLE
&
HOLD
CHANNEL
CURRENT
SENSE
PWM4
ISEN1
ISEN2
ISEN3
ISEN4
4
FN9097.4
December 28, 2004
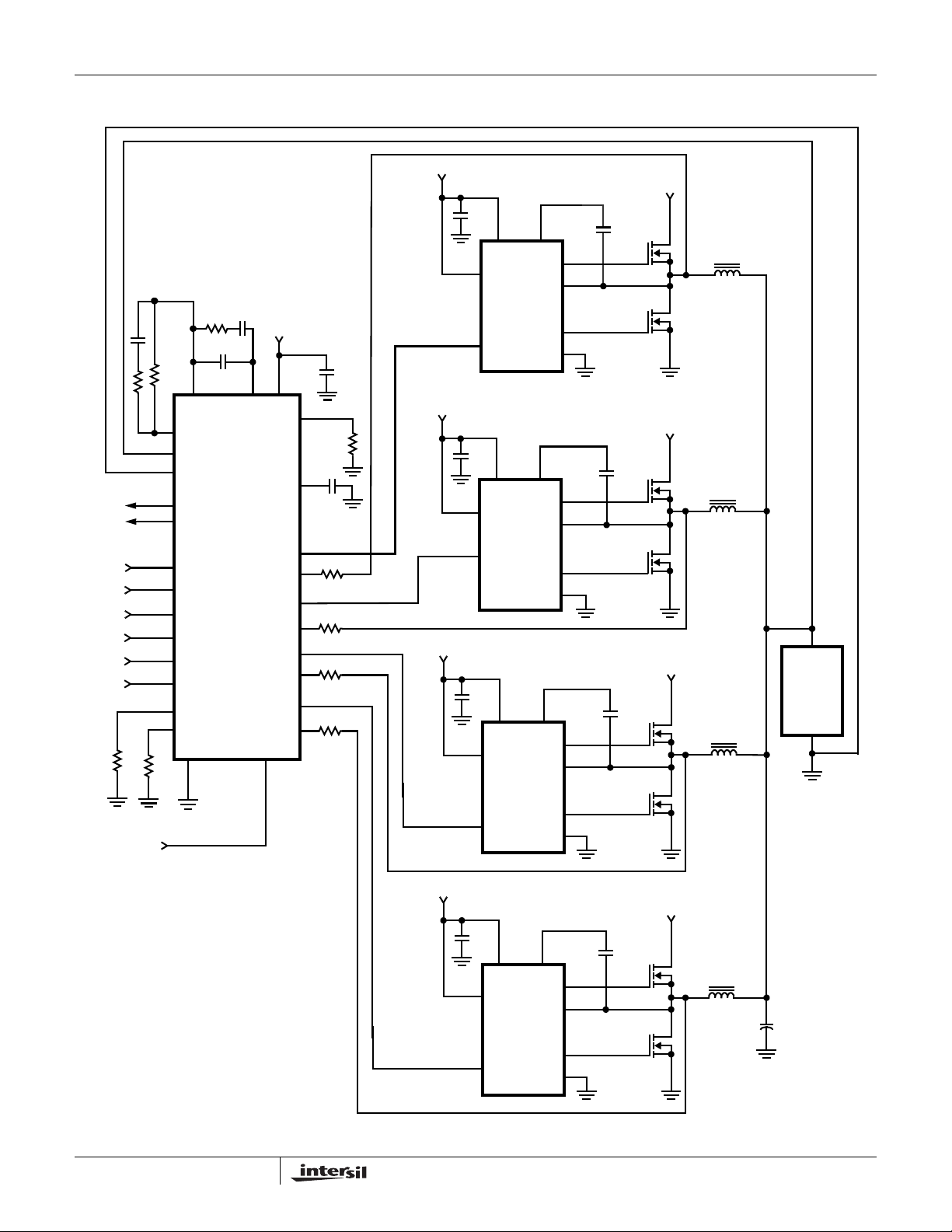
Typical Application of ISL6556BCB
+5V
COMP
VID_PGOOD
(BUFFERED)
R
FB
VDIFF
VSEN
RGND
PGOOD
OVP
VID4
VID3
VID2
VID1
VID0
VID12.5
OFS
FS
GND
T
ISL6556BCB
VCC
TCOMP
REF
PWM1
ISEN1
PWM2
ISEN2
PWM3
ISEN3
PWM4
ISEN4
EN
ISL6556B
+12V
VCC
PVCC
HIP6601B
PWM
+12V
VCC
PVCC
HIP6601B
PWM
+12V
VCC
PVCC
HIP6601B
PWM
VIN
BOOT
UGATE
PHASE
LGATE
GND
VIN
BOOT
UGATE
PHASE
LGATE
GND
VIN
µP
LOAD
BOOT
UGATE
PHASE
LGATE
GND
+12V
VIN
VCC
BOOT
UGATE
PVCC
PHASE
HIP6601B
LGATE
PWM
5
GND
FN9097.4
December 28, 2004
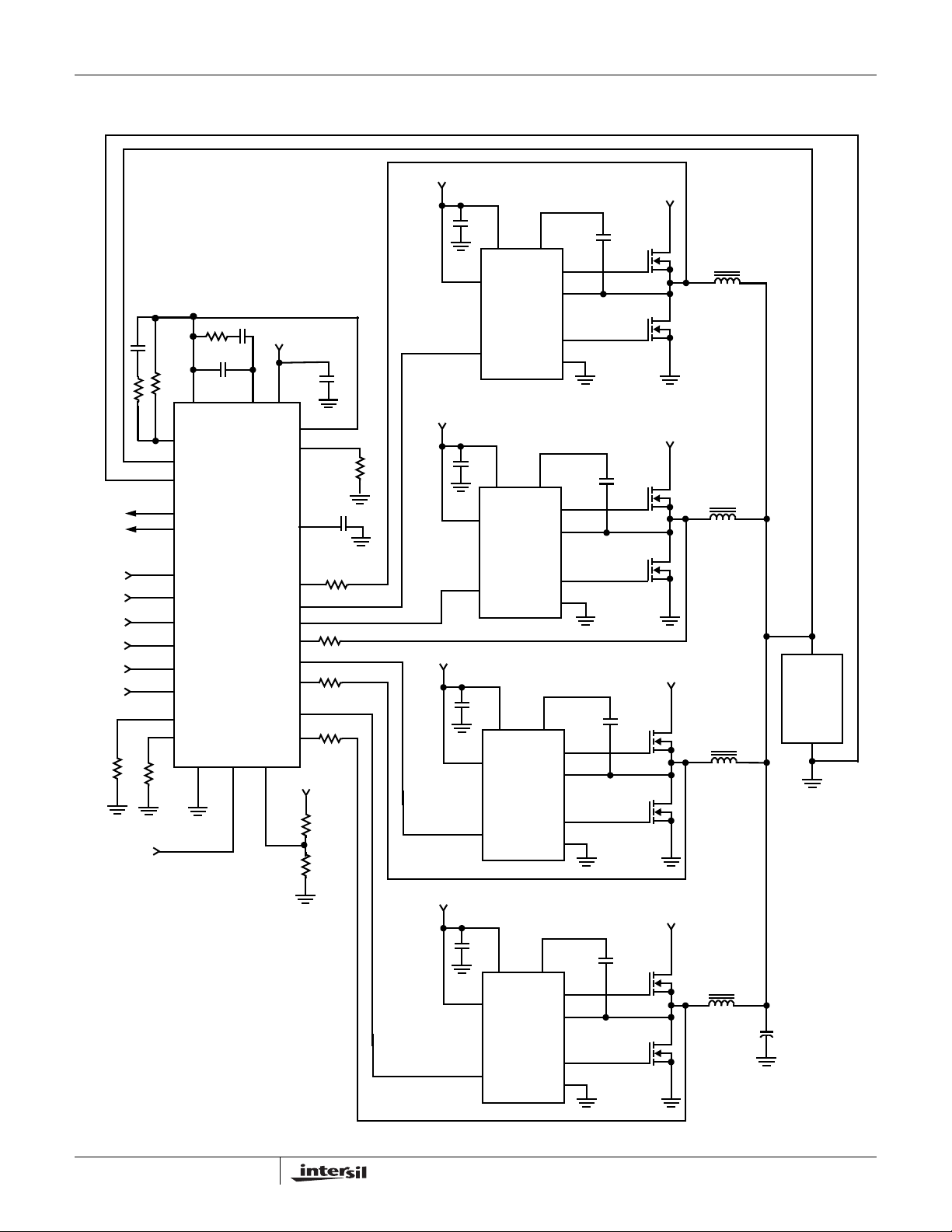
Typical Application of ISL6556BCR
+5V
COMP
VID_PGOOD
R
FB
VDIFF
VSEN
RGND
PGOOD
OVP
VID4
VID3
VID2
VID1
VID0
VID12.5
OFS
FS
GND
T
ISL6556BCR
ENLL
VCC
OFSOUT
TCOMP
REF
ISEN1
PWM1
PWM2
ISEN2
PWM3
ISEN3
PWM4
ISEN4
EN
+12V
ISL6556B
+12V
VCC
PVCC
HIP6601B
PWM
+12V
VCC
PVCC
HIP6601B
PWM
+12V
VCC
PVCC
HIP6601B
PWM
VIN
BOOT
UGATE
PHASE
LGATE
GND
VIN
BOOT
UGATE
PHASE
LGATE
GND
VIN
µP
LOAD
BOOT
UGATE
PHASE
LGATE
GND
+12V
VIN
VCC
BOOT
UGATE
PVCC
PHASE
HIP6601B
LGATE
PWM
6
GND
FN9097.4
December 28, 2004
ISL6556B
Absolute Maximum Ratings
Supply Voltage, VCC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .+7V
Input, Output, or I/O Voltage (except OVP) . .GND -0.3V to V
OVP Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .+15V
ESD (Human body model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . >4kV
ESD (Machine model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .>300V
ESD (Charged device model) . . . . . . . . . . . . . . . . . . . . . . . . . . >2kV
CC
+ 0.3V
Thermal Information
Thermal Resistance θJA (°C/W) θJC (°C/W)
SOIC Package (Note 1) . . . . . . . . . . . . 60 N/A
QFN Package (Notes 2, 3). . . . . . . . . . 32 3.5
Maximum Junction Temperature . . . . . . . . . . . . . . . . . . . . . . . 150°C
Maximum Storage Temperature Range . . . . . . . . . . . -65°C to 150°C
Maximum Lead Temperature (Soldering 10s) . . . . . . . . . . . . . 300°C
(SOIC - Lead Tips Only)
Operating Conditions
Supply Voltage, VCC (5V bias mode, Note 3) . . . . . . . . . . +5V ±5%
Junction Temperature . . . . . . . . . . . . . . . . . . . . . . . . . 0°C to 125°C
CAUTION: Stress above those listed in “Absolute Maximum Ratings” may cause permanent damage to the device. This is a stress only rating and operation of the
device at these or any other conditions above those indicated in the operational section of this specification is no t implied.
NOTES:
is measured with the component mounted on a high effective thermal conductivity test board in free air. See Tech Brief TB379 for details.
1. θ
JA
2. θ
is measured in free air with the component mounted on a high effective thermal conductivity test board with “direct attach” features. See
JA
Tech Brief TB379.
3. For θ
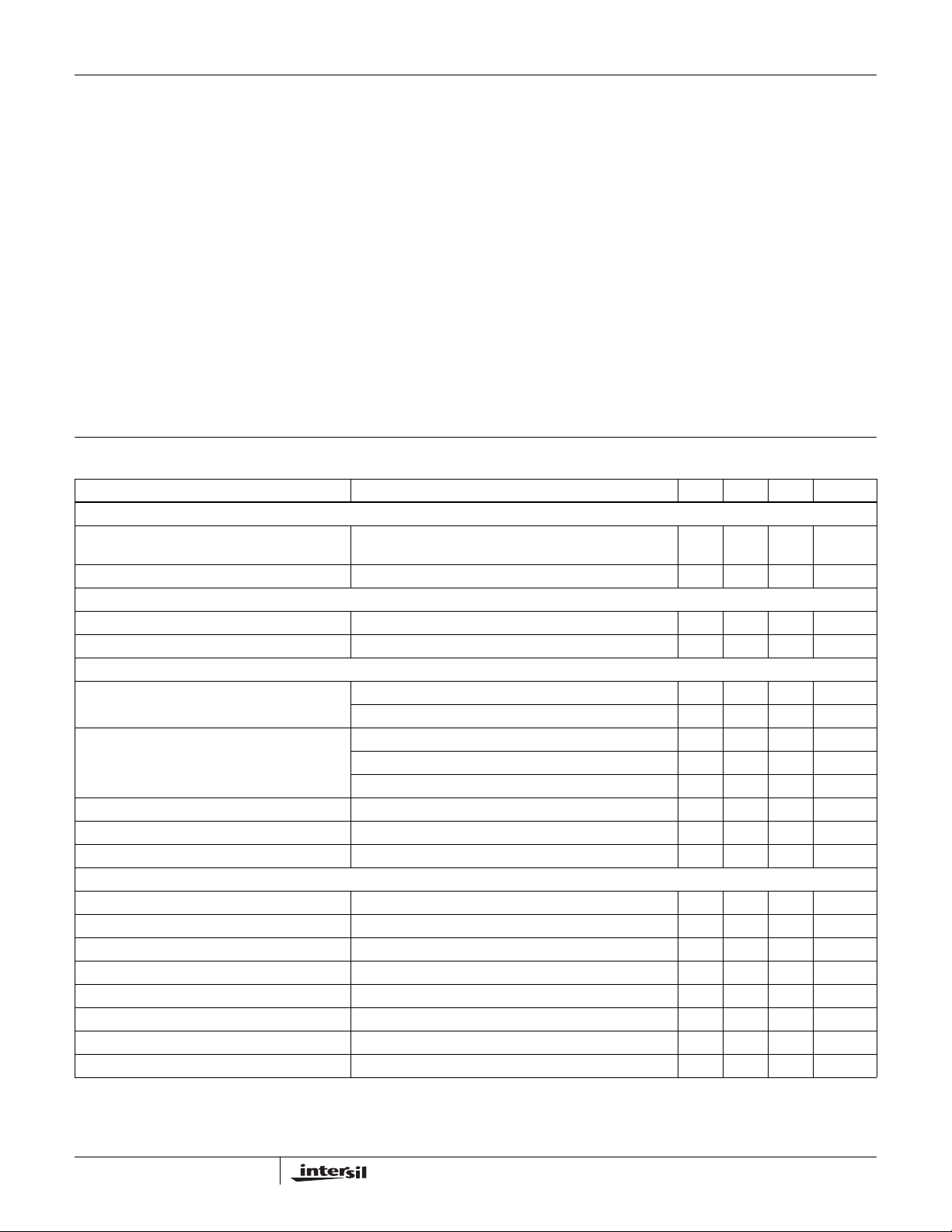
Electrical Specifications Operating Conditions: VCC = 5V or ICC < 25mA (Note 4), T
VCC SUPPLY CURRENT
Nominal Supply VCC = 5VDC; EN = 5VDC; R
Shutdown Supply VCC = 5VDC; EN = 0VDC; R
SHUNT REGULATOR
VCC Voltage VCC tied to 12VDC thru 300Ω resistor, R
VCC Sink Current VCC tied to 12VDC thru 300Ω resistor, R
POWER-ON RESET AND ENABLE
POR Threshold VCC Rising 4.2 4.31 4.50 V
ENABLE Threshold EN Rising 1.22 1.24 1.26 V
ENLL Input Logic Low Level --0.4V
ENLL input Logic High Level 0.8 - - V
ENLL Leakage Current ENLL = 5V - - 1 µA
REFERENCE VOLTAGE AND DAC
System Accuracy (VID = 1.2V-1.6V) (Note 5) -0.5 - 0.5 %VID
System Accuracy (VID = 0.8375V-1.1875V) (Note 5) -0.8 - 0.8 %VID
VID Pull Up -65 -50 -35 µA
VID Input Low Level --0.4V
VID Input High Level 0.8 - - V
DAC Source/Sink Current VID = 010100 -200 - 200 µA
OFSOUT Source/Sink Current (ISL6556BCR Only) -50 - 50 µA
REF Source/Sink Current -50 - 50 µA
, the “case temp” location is the center of the exposed metal pad on the package underside.
JC
Unless Otherwise Specified.
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
= 100kΩ,
ISEN1 = ISEN2 = ISEN3 = ISEN4 = -70µA
VCC Falling 3.7 3.82 4.00 V
Hysteresis - 100 - mV
Fault Reset 1.10 1.14 1.18 V
T
= 100kΩ -1014mA
T
J
= 100kΩ 5.6 5.9 6.2 V
T
= 100kΩ --25mA
T
= 0°C to 105°C.
-1418mA
7
FN9097.4
December 28, 2004
ISL6556B
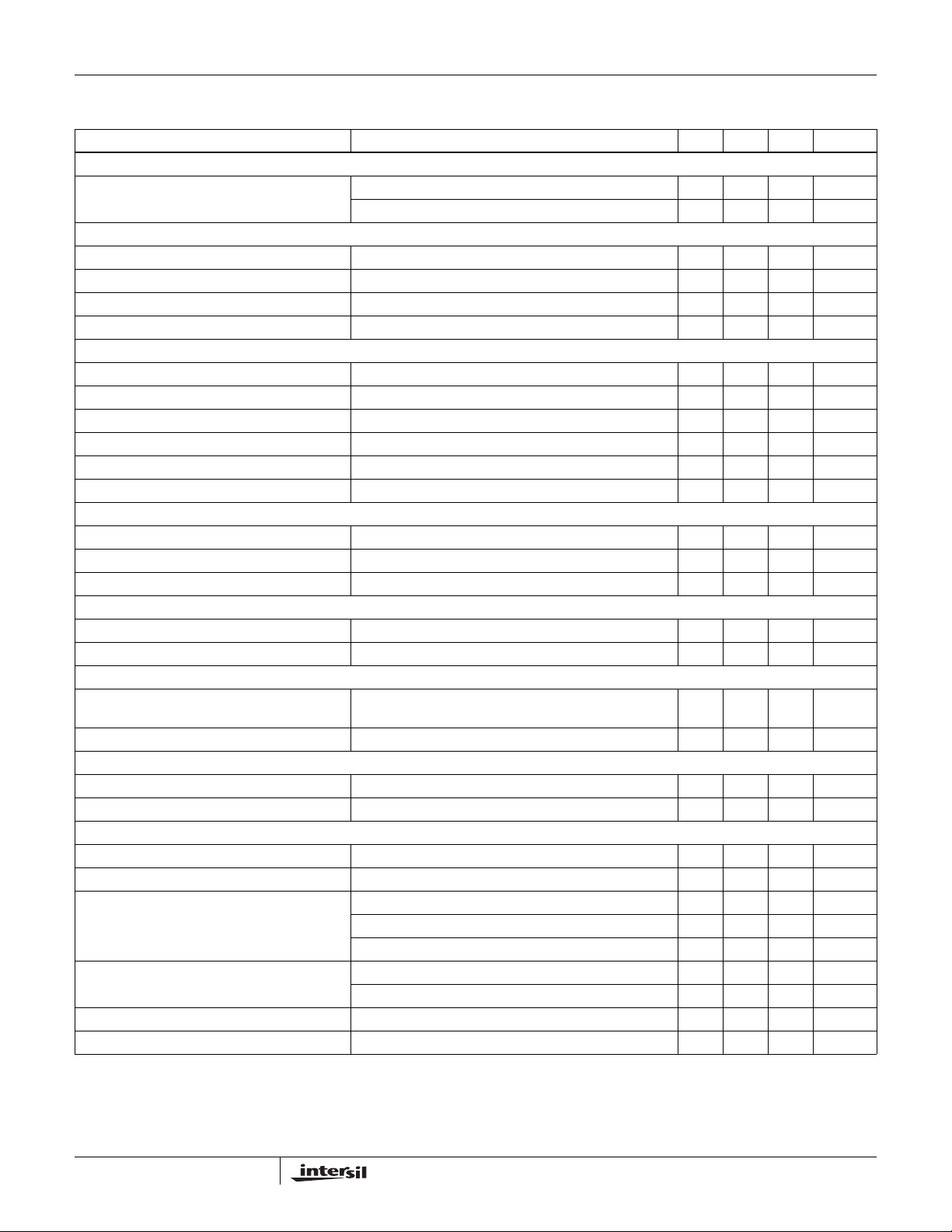
Electrical Specifications Operating Conditions: VCC = 5V or ICC < 25mA (Note 4), T
= 0°C to 105°C.
J
Unless Otherwise Specified. (Continued)
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
PIN-ADJUSTABLE OFFSET
Voltage at OFS pin Offset resistor connected to ground 485 500 515 mV
VCC = 5.00V, offset resistor connected to VCC 2.91 3.00 3.09 V
OSCILLATOR
Accuracy R
= 100kΩ -10 - 10 %
T
Adjustment Range 0.08 - 1.5 MHz
Sawtooth Amplitude -1.5- V
Max Duty Cycle - 66.7 - %
ERROR AMPLIFIER
Open-Loop Gain R
Open-Loop Bandwidth C
Slew Rate C
= 10kΩ to ground - 80 - dB
L
= 100pF, RL = 10kΩ to ground - 18 - MHz
L
= 100pF 4.5 6.0 7.5 V/µs
L
Maximum Output Voltage 4.0 4.3 - V
Output High Voltage @ 2mA 3.7 - - V
Output Low Voltage @ 2mA --1.35V
REMOTE-SENSE AMPLIFIER
Bandwidth -20- MHz
Output High Current VSEN - RGND = 2.5V -500 - 500 µA
Output High Current VSEN - RGND = 0.6 -500 - 500 µA
PWM OUTPUT
PWM Output Voltage LOW Threshold Iload = ±500µA --0.3V
PWM Output Voltage HIGH Threshold Iload = ±500µA 4.3 - - V
TEMPERATURE COMPENSATION
Temperature Compensation Current @ 40°C and
10 15 20 µA
Tcomp = 0.5V
Temperature Compensation Transconductance - 1 - 1µA/V/°C
SENSE CURRENT
Sensed Current Tolerance ISEN1 = ISEN2 = ISEN3 = ISEN4 = 80µA, 0°C to 105°C 74 81 91 µA
Overcurrent Trip Level 98 110 122 µA
POWER GOOD AND PROTECTION MONITORS
PGOOD Low Voltage I
= 4mA - - 0.4 V
PGOOD
Undervoltage Offset From VID VSEN Falling 72 74 76 %VID
Overvoltage Threshold Voltage above VID, after Soft-Start (Note 5) 180 200 220 mV
Before Enable - 1.63 - V
VCC < POR Threshold 1.7 1.8 1.87 V
Overvoltage Reset Voltage VCC ≥ POR Threshold, VSEN Falling - 0.6 - V
VCC < POR Threshold - 1.5 - V
OVP Drive Voltage I
= -100mA, VCC = 5V - 1.9 - V
OVP
Minimum VCC for OVP 1.4 - - V
NOTES:
4. When using the internal shunt regulator, VCC is clamped to 6.02V (max). Current must be limited to 25mA or less.
5. These parts are designed and adjusted for accuracy with all errors in the voltage loop included.
6. During soft-start, VDAC rises from 0 to VID. The overvoltage trip level is the higher of 1.7V and VDAC + 0.2V.
8
FN9097.4
December 28, 2004

ISL6556B
Functional Pin Description
VCC - Supplies all the power necessary to operate the chip.
The controller starts to operate when the voltage on this pin
exceeds the rising POR threshold and shuts down when the
voltage on this pin drops below the falling POR threshold.
Connect this pin directly to a +5V supply or through a series
300Ω resistor to a +12V supply.
GND - Bias and reference ground for the IC.
EN - This pin is a threshold-sensitive enable input for the
controller. Connecting the 12V supply to EN through an
appropriate resistor divider provides a means to synchronize
power-up of the controller and the MOSFET driver ICs.
When EN is driven above 1.24V, the ISL6556B is active
depending on status of ENLL, the internal POR, and pending
fault states. Driving EN below 1.14V will clear all fault states
and prime the ISL6556 to soft-star t wh en re-enabled.
ENLL - This pin is implemented in QFN ISL6556B only. It’ s a
logic-level enable input f or the controller. When asserted to a
logic high, the ISL6556B is active depending on status of
EN, the internal POR, VID inputs and pending fault states.
Deasserting ENLL will clear all fault states and prime the
ISL6556B to soft-start when re-enabled.
FS - A resistor, placed from FS to ground will set the switch-
ing frequency. There is an inverse relationship between the
value of the resistor and the switching frequency. See
Figure 13 and Equation 27.
VID4, VID3, VID2, VID1, VID0, and VID12.5 - These are the
inputs to the internal DAC that provides the reference v oltage
for output regulation. Connect these pins either to open-drain
outputs with or without external pull-up resistors or to activepull-up outputs. VID4-VID12.5 have 50µA internal pull-up
current sources that diminish to zero as the voltage rises
above the logic-high level. These inputs can be pulled up as
high as VCC plus 0.3V.
VDIFF, VSEN, and RGND - VSEN and RGND form the
precision differential remote-sense amplifier. This amplifier
converts the differential voltage of the remote output to a
single-ended voltage referenced to local ground. VDIFF is
the amplifier’s output and the input to the regulation and
protection circuitry. Connect VSEN and RGND to the sense
pins of the remote load.
FB and COMP - Inverting input and output of the error
amplifier respectively. FB is connected to VDIFF through a
resistor. A negative current, proportional to output current is
present on the FB pin. A properly sized resistor between
VDIFF and FB sets the load line (droop). The droop scale
factor is set by the ratio of the ISEN resistors and the lower
MOSFET r
external R-C network to compensate the regulator.
REF - The REF input pin is the positive input of the Error
Amp. It is internally connected to DAC through a 1kΩ
resistor. A capacitor is used to between REF pin and ground
. COMP is tied back to FB through an
DS(ON)
to smooth the voltage transition during Dynamic VID™
operations.
TCOMP - Temperature compensation scaling input. A
resistor from this pin to ground sets the temperature
compensation scales of internal thermal sense circuitry . The
sensed temperature is utilized to modify the droop current
output to FB to adjust for MOSFET r
DS(ON)
variations with
temperature.
PWM1, PWM2, PWM3, PWM4 - Pulse-width modulation
outputs. Connect these pins to the PWM input pins of the
Intersil driver IC. The number of active channels is
determined by the state of PWM3 and PWM4. Tie PWM3 to
VCC to configure for 2-phase operation. Tie PWM4 to VCC
to configure for 3-phase operation.
ISEN1, ISEN2, ISEN3, ISEN4 - Current sense inputs. The
ISEN1, ISEN2, ISEN3, and ISEN4 pins are held to a virtual
ground such that a resistor connected between them and the
drain terminal of the associated lower MOSFET will carry a
current proportional to the current flowing through the
related channel. The current is determined by the negative
voltage developed across the lower MOSFET’s r
DS(ON)
which is the channel current scaled by the inverse of the
r
. The current is used as a reference for channel
DS(ON)
balancing, protection, and load-line regulation (via the FB
pin). Inactive channels should have their respective current
sense inputs left open.
PGOOD - PGOOD is used as an indication of the end of
soft-start per the microprocessor specification. It is an opendrain logic output that is low impedance until the soft-start is
completed. It will be pulled low again once the undervoltage
point is reached.
OFS - The OFS pin provides a means to program a dc
current for generating a offset voltage across the droop
resistor between FB and VDIFF. The offset current is
generated via an external resistor and precision internal
voltage references. The polarity of the offset is selected by
connecting the resistor to GND or VCC. For no offset, the
OFS pin should be left unterminated.
OFSOUT (ISL6556BCR only) - OFSOUT is the output of
the offset-current generating circuit. It must be connected to
FB to generate a dc offset.
OVP - Overvoltage protection pin. This pin pulls to VCC and
is latched when an overvoltage condition is detected.
Connect this pin to the gate of an SCR or MOSFET tied from
V
IN
or V
to ground to prevent damage to the load. This
OUT
pin may be pulled as high as 15V to ground with an external
resistor. Howe ver, it is only capable of pulling low when VCC
is above 2V.
9
FN9097.4
December 28, 2004

ISL6556B
Operation
Multi-Phase Power Conversion
Microprocessor load current profiles hav e chang ed to the
point that the advantages of multi-phase po wer conversion are
impossible to ignore. The technical challen ges associated
with producing a single-phase converter which is both costeffective and thermally viab le ha ve forced a change to the
cost-saving approach of multi-phase. The ISL65 56B controller
helps simplifying the implementation by integr ating vi tal
functions and requiring minimal output components. The bloc k
diagrams on pages 2 and 3 provide top level views of multiphase power conversion using the ISL65556ACB and
ISL6556BCR controllers.
IL1 + IL2 + IL3, 7A/DIV
IL3, 7A/DIV
PWM3, 5V/DIV
IL2, 7A/DIV
PWM2, 5V/DIV
IL1, 7A/DIV
PWM1, 5V/DIV
1µs/DIV
FIGURE 1. PWM AND INDUCTOR-CURRENT WA VEFORMS
Interleaving
The switching of each channel in a multi-phase converter is
timed to be symmetrically out of phase with each of the other
channels. In a 3-phase converter, each channel switches 1/3
cycle after the previous channel and 1/3 cycle before the
following channel. As a result, the three-phase converter has
a combined ripple frequency three times greater than the
ripple frequency of any one phase. In addition, the peak-topeak amplitude of the combined inductor currents is reduced
in proportion to the number of phases (Equations 1 and 2).
Increased ripple frequency and lower ripple amplitude mean
that the designer can use less per-channel inductance and
lower total output capacitance for any performance
specification.
Figure 1 illustrates the multiplicative effect on output ripple
frequency. The three channel currents (IL1, IL2, and IL3)
combine to form the AC ripple current and the DC load
current. The ripple component has three times the ripple
frequency of each individual channel current. Each PWM
pulse is terminated 1/3 of a cycle after the PWM pulse of the
previous phase. The peak-to-peak current for each phase is
about 7A, and the dc components of the inductor currents
combine to feed the load.
To understand the reduction of ripple current amplitude in
the multi-phase circuit, examine the equation representing
an individual channel’s peak-to-peak inductor current.
VINV
–()V
OUT
I
------------------------------------------------------=
PP
LfSV
In Equation 1, V
IN
and V
IN
OUT
are the input and output
OUT
(EQ. 1)
voltages respectively, L is the single-channel inductor value,
and f
is the switching frequency.
S
The output capacitors conduct the ripple component of the
inductor current. In the case of multi-phase converters, the
capacitor current is the sum of the ripple currents from each
of the individual channels. Compare Equation 1 to the
expression for the peak-to-peak current after the summation
of N symmetrically phase-shifted inductor currents in
Equation 2. Peak-to-peak ripple current decreases by an
amount proportional to the number of channels. Outputvoltage ripple is a function of capacitance, capacitor
equivalent series resistance (ESR), and inductor ripple
current. Reducing the inductor ripple current allows the
designer to use fewer or less costly output capacitors.
VINNV
–()V
OUT
------------------------------------------------------------=
I
L PP,
LfSV
OUT
IN
(EQ. 2)
Another benefit of interleaving is to reduce input ripple
current. Input capacitance is determined in part by the
maximum input ripple current. Multi-phase topologies can
improve overall system cost and size b y lowering input ripple
current and allowing the designer to reduce the cost of input
capacitance. The example in Figure 2 illustrates input
currents from a three-phase converter combining to reduce
the total input ripple current.
The converter depicted in Figure 2 delive rs 36A to a 1.5V load
from a 12V input. The RMS input capacitor current is 5.9A.
Compare this to a single-phase conv erter also stepping down
12V to 1.5V at 36A. The single-phase converter has 11.9A
RMS input capacitor current. The single-phase converter
must use an input capacitor bank with twice the RMS current
capacity as the equivalent three-phase conve rter.
INPUT-CAPACITOR CURRENT, 10A/DIV
CHANNEL 3
INPUT CURRENT
10A/DIV
CHANNEL 2
Channel 2
INPUT CURRENT
input current
10A/DIV
10A/DIV
CHANNEL 1
Channel 1
INPUT CURRENT
input current
10A/DIV
10A/DIV
1µs/DIV
FIGURE 2. CHANNEL INPUT CURRENTS AND INPUT-
CAPACITOR RMS CURRENT FOR 3-PHASE
CONVERTER
10
FN9097.4
December 28, 2004
Figures 14, 16 and 16 in the section entitled Input Capacitor
Selection can be used to determine the input-capacitor RMS
current based on load current, duty cycle, and the number of
channels. They are provided as aids in determining the
optimal input capacitor solution. Figure 17 shows the single
phase input-capacitor RMS current for comparison.
PWM Operation
The timing of each converter leg is set by the number of
active channels. The default channel setting for the
ISL6556B is four. One switching cycle is defined as the time
between PWM1 pulse termination signals. The pulse
termination signal is the internally generated clock signal
that triggers the falling edge of PWM1. The cycle time of the
pulse termination signal is the inverse of the switching
frequency set by the resistor between the FS pin and
ground. Each cycle begins when the clock signal commands
the channel-1 PWM output to go low. The PWM1 transition
signals the channel-1 MOSFET driver to turn off the
channel-1 upper MOSFET and turn on the channel-1
synchronous MOSFET. In the default channel configuration,
the PWM2 pulse terminates 1/4 of a cycle after PWM1. The
PWM3 output follows another 1/4 of a cycle after PWM2.
PWM4 terminates another 1/4 of a cycle after PWM3.
switching cycle. The sampled current, I
, is used for channel-
n
current balance, load-line regulation, overcurrent protection,
and module current sharing. From Figure 3, the following
equation for I
InI
L
where I
If R
DS(ON)
is derived
n
r
DS ON()
----------------------=
R
ISEN
is the channel current.
L
sensing is not desired, an independent current-
(EQ. 3)
sense resistor in series with the lower MOSFET source can
serve as a sense element. The circuitry shown in Figure 3
represents channel n of an N-channel converter. This
circuitry is repeated for each channel in the converter, but
may not be active depending upon the status of the PWM3
and PWM4 pins as described under PWM Operation
section.
In
If PWM3 is connected to VCC, two channel operation is
selected and the PWM2 pulse terminates 1/2 of a cycle later.
Connecting PWM4 to VCC selects three channel operation
and the pulse-termination times are spaced in 1/3 cycle
increments.
Once a PWM signal transitions low, it is held low for a
minimum of 1/3 cycle. This forced off time is required to
ensure an accurate current sample. Current sensing is
described in the next section. After the forced off time
expires, the PWM output is enabled. The PWM output state
is driven by the position of the error amplifier output signal,
V
, minus the current correction signal relative to the
COMP
sawtooth ramp as illustrated in Figure 4. When the modified
V
voltage crosses the sawtooth ramp , the PWM output
COMP
transitions high. The MOSFET driver detects the change in
state of the PWM signal and turns off the synchronous
MOSFET and turns on the upper MOSFET . The PWM signal
will remain high until the pulse termination signal marks the
beginning of the next cycle by triggering the PWM signal low.
Current Sensing
During the forced off time following a PWM transition low, the
controller senses channel current by sampling the voltage
across the lower MOSFET r
referenced operational amplifier, internal to the ISL6556B, is
connected to the PHASE node through a resistor, R
The voltage across R
across the r
DS(ON)
is equivalent to the voltage drop
ISEN
of the lower MOSFET while it is
conducting. The resulting current into the ISEN pin is
proportional to the channel current, I
sampled and held after sufficient settling time every
(see Figure 3). A ground-
DS(ON)
. The ISEN current is
L
ISEN
.
FIGURE 3. INTERNAL AND EXTERNAL CURRENT -SENSING
CIRCUITRY
Channel-Current Balance
The sampled current, In, from each active channel is used to
gauge both overall load current and the relative channel
current carried in each leg of the converter. The individual
sample currents are summed and divided by the number of
active channels. The resulting average current, I
provides a measure of the total load current demand on the
converter and the appropriate level of channel current. Using
Figures 3 and 4, the average current is defined as
where N is the number of active channels and I
total load current.
The average current is subtracted from the individual
channel sample currents. The resulting error current, I
filtered to modify V
. The modified V
COMP
COMP
compared to a sawtooth ramp signal to produce a modified
,
AVG
is the
OUT
ER
signal is
, is
11
FN9097.4
December 28, 2004

ISL6556B
pulse width which corrects for any unbalance and drives the
error current toward zero. Fig ure 4 illustrates Intersil’s
patented current-balance method as implemented on
channel-1 of a multi-phase converter.
V
COMP
FIGURE 4. CHANNEL-1 PWM FUNCTION AND CURRENT-
+
-
f(jω)
I
ER
+
SAWTOOTH SIGNAL
I
AVG
-
I
1
÷ N
+
-
Σ
NOTE: *Channels 3 and 4 are optional.
BALANCE ADJUSTMENT
PWM1
I4 *
I
*
3
I
2
Two considerations designers face are MOSFET selection
and inductor design. Both are significantly improved when
channel currents track at any load level. The need for
complex drive schemes for multiple MOSFETs, e xotic
magnetic materials, and expensive heat sinks is avoided,
resulting in a cost-effective and easy-to-implement solution
relative to single-phase conversion. Channel-current balance
insures that the thermal advantage of multi-phase
conversion is realized. Heat dissipation in multiple channels
is spread over a greater area than can easily be
accomplished using the single phase approach.
In some circumstances, it may be necessary to deliberately
design some channel-current unbalance into the system. In
a highly compact design, one or two channels may be able to
cool more effectively than the other(s) due to nearby air flow
or heat sinking components. The other channel(s) may have
more difficulty cooling with comparatively less air flow and
heat sinking. The hotter channels may also be located close
to other heat-generating components tending to drive their
temperature even higher. In these cases, the proper
selection of the current sense resistors (R
in Figure 3)
ISEN
introduces channel current unbalance into the system.
Increasing the value o f R
in the cooler channels and
ISEN
decreasing it in the hotter channels moves all channels into
thermal balance at the expense of current balance.
Voltage Regulation
The integrating compensation network shown in Figure 5
assures that the steady-state error in the output voltage is
limited only to the error in the reference voltage (output of
the DAC) and offset errors in the OFS current source,
remote-sense and error amplifiers. Intersil specifies the
guaranteed tolerance of the ISL6556B to include the
combined tolerances of each of these elements.
The output of the error amplifier , V
, is compared to the
COMP
sawtooth wavef orm to generate the PWM signals. The PWM
signals control the timing of the Intersil MOSFET drivers and
regulate the converter output to the specified reference
voltage. The internal and external circuitry that controls
voltage regulation is illustrated in Figure 5.
EXTERNAL CIRCUIT ISL6556B INTERNAL CIRCUIT
R
C
C
C
COMP
TCOMP
R
TCOMP
REF
C
REF
FB
+
R
V
FB
DROOP
V
V
-
OUT
OUT
+
-
VDIFF
VSEN
RGND
VID DAC
1k
+
-
ERROR AMPLIFIER
I
AVG
+
-
DIFFERENTIAL
REMOTE-SENSE
AMPLIFIER
V
COMP
FIGURE 5. OUTPUT VOL T A GE AND LO AD-LINE
REGULATION WITH OFFSET ADJUSTMENT
The ISL6556B incorporates an inter nal differential remotesense amplifier in the feedback path. The amplifier removes
the voltage error encountered when measuring the output
voltage relative to the local controller ground reference point
resulting in a more accurate means of sensing output
voltage. Connect the microprocessor sense pins to the noninverting input, VSEN, and inverting input, RGND, of the
remote-sense amplifier. The remote-sense output, V
DIFF
, is
connected to the inverting input of the error amplifier through
an external resistor.
A digital to analog converter (DAC) generates a reference
voltage based on the state of logic signals at pins VID4
through VID12.5. The DAC decodes the 6-bit logic signal
(VID) into one of the discrete voltages shown in Table 1.
Each VID input offers a 20µA pull-up to an internal 2.5V
source for use with open-drain outputs. The pull-up current
diminishes to zero above the logic threshold to protect
voltage-sensitive output devices. External pull-up resistors
can augment the pull-up current sources in case leakage
into the driving device is greater than 20µA.
12
FN9097.4
December 28, 2004

ISL6556B
TABLE 1. VOLTAGE ID ENTIFI CATION (VID) CODES
VID4 VID3 VID2 VID1 VID0 VID12.5 VDAC
0 1 0 1 0 0 0.8375V
0 1 0 0 1 1 0.8500V
0 1 0 0 1 0 0.8625V
0 1 0 0 0 1 0.8750V
0 1 0 0 0 0 0.8875V
0 0 1 1 1 1 0.9000V
0 0 1 1 1 0 0.9125V
0 0 1 1 0 1 0.9250V
0 0 1 1 0 0 0.9375V
0 0 1 0 1 1 0.9500V
0 0 1 0 1 0 0.9625V
0 0 1 0 0 1 0.975V0
0 0 1 0 0 0 0.9875V
0 0 0 1 1 1 1.0000V
0 0 0 1 1 0 1.0125V
T ABLE 1. VOL TAGE IDENTIFICATION (VID) CODES (Continued)
VID4 VID3 VID2 VID1 VID0 VID12.5 VDAC
1 1 0 0 0 1 1.2500V
1 1 0 0 0 0 1.2625V
1 0 1 1 1 1 1.2750V
1 0 1 1 1 0 1.2875V
1 0 1 1 0 1 1.3000V
1 0 1 1 0 0 1.3125V
1 0 1 0 1 1 1.3250V
1 0 1 0 1 0 1.3375V
1 0 1 0 0 1 1.3500V
1 0 1 0 0 0 1.3625V
1 0 0 1 1 1 1.3750V
1 0 0 1 1 0 1.3875V
1 0 0 1 0 1 1.4000V
1 0 0 1 0 0 1.4125V
1 0 0 0 1 1 1.4250V
0 0 0 1 0 1 1.0250v
0 0 0 1 0 0 1.0375V
0 0 0 0 1 1 1.0500V
0 0 0 0 1 0 1.0625V
0 0 0 0 0 1 1.0750V
0 0 0 0 0 0 1.0875V
1111 1 1 OFF
1111 1 0 OFF
1 1 1 1 0 1 1.1000V
1 1 1 1 0 0 1.1125V
1 1 1 0 1 1 1.1250V
1 1 1 0 1 0 1.1375V
1 1 1 0 0 1 1.1500V
1 1 1 0 0 0 1.1625V
1 1 0 1 1 1 1.1750V
1 1 0 1 1 0 1.1875V
1 1 0 1 0 1 1.2000V
1 1 0 1 0 0 1.2125V
1 1 0 0 1 1 1.2250V
1 1 0 0 1 0 1.2475V
1 0 0 0 1 0 1.4375V
1 0 0 0 0 1 1.4500V
1 0 0 0 0 0 1.4625V
0 1 1 1 1 1 1.4750V
0 1 1 1 1 0 1.4875V
0 1 1 1 0 1 1.5000V
0 1 1 1 0 0 1.5125V
0 1 1 0 1 1 1.5250V
0 1 1 0 1 0 1.5375V
0 1 1 0 0 1 1.5500V
0 1 1 0 0 0 1.5625V
0 1 0 1 1 1 1.5750V
0 1 0 1 1 0 1.5875V
0 1 0 1 0 1 1.600V
Load-Line Regulation
Some microprocessor manufacturers require a preciselycontrolled output resistance. This dependence of output
voltage on load current is often termed “droop” or “load line”
regulation. By adding a well controlled output impedance,
the output voltage can be level in the direction that works to
control the voltage spike coincident with fast load current
demand changes.
13
FN9097.4
December 28, 2004

ISL6556B
The magnitude of the spike is dictated by the ESR and ESL
of the output capacitors selected. By positioning the no-load
voltage level near the upper specification limit, a larger
negative spike can be sustained without crossing the lower
limit. By adding a well controlled output impedance, the
output voltage under load can effectively be level shifted
down so that a larger positive spike can be sustained without
crossing the upper specification limit.
As shown in Figure 5, a current proportional to the average
current in all active channels, I
load-line regulation resistor, R
across R
is proportional to the output current, effectively
FB
creating an output voltage droop with a steady-state value
defined as
, flows from FB through a
AVG
. The resulting voltage drop
FB
R
VDIFF
FB
VCC
GND
DYNAMIC
VID D/A
E/A
FB
OR
V
DROOPIAVGRFB
In most cases, each channel uses the same R
sense current. A more complete expression for V
=
ISEN
(EQ. 5)
value to
DROOP
is
derived by combining equations 4 and 5.
V
DROOP
=
-------------
N
DS ON()
---------------------- R
R
ISEN
FB
(EQ. 6)
r
I
OUT
Output-Voltage Offset Programming
The ISL6556B allows the designer to accurately adjust the
offset voltage. When a resistor , R
OFS and VCC, the voltage across it is regulated to 2.0V . This
causes a proportional current (I
is connected to ground, the voltage across it is regulated to
0.5V, and I
flows out of OFS. The offset current flowing
OFS
through the resistor between VDIFF and FB will generate the
desired offset voltage which is equal to the product (I
RFB). These functions are shown in Figures 6 and 7.
As evident in Figure 7, the OFSOUT pin must be connected
to the FB pin for this current injection to function in
ISL6556BCR. The current flow through R
at the REF pin, which is ul timately duplicated at the output of
the regulator.
Once the desired output offset voltage has been determined,
use the following formulas to set R
For Positive Offset (connect R
R
OFS
--------------------------
V
OFFSET
0.5 RFB×
=
For Negative Offset (connect R
2R
×
OFS
=
FB
--------------------------
V
OFFSET
, is connected between
OFS
) to flow into OFS. If R
OFS
creates an offset
FB
:
OFS
to GND):
OFS
to VCC):
OFS
OFS
OFS
(EQ. 7)
(EQ. 8)R
x
0.5V
VCC
VCC
-
2.0V
+
-
2.0V
+
R
OFS
OFS
ISL6556BCB
FIGURE 6. OUTPUT VOL TAGE OFFSET PROGRAMMING
VDIFF
R
FB
FB
OFSOUT
VCC
GND
R
OFS
FIGURE 7. OUTPUT VOL T A GE OFFSET PR OGRAMMING
OR
OFS
WITH ISL6556BCB (28-LEAD SOIC)
DYNAMIC
VID D/A
ISL6556BCR
WITH ISL6556BCR (32-LEAD QFN)
GND
GND
+
0.5V
-
E/A
+
-
Dynamic VID
Modern microprocessors need to make changes to their core
voltage as part of normal operation. They direct the corevoltage regulator to do this by making changes to the VID
inputs during regulator operation. The power managemen t
solution is required to monitor the DAC inputs and respond to
14
FN9097.4
December 28, 2004

ISL6556B
on-the-fly VID changes in a controlled manner. Supervising
the safe output voltage tran sitio n within the DAC range of the
processor without discontinuity or disruption is a necessary
function of the core-voltage regula t or.
The ISL6556B checks the VID inputs six times every
switching cycle. If the VID code is found to have changed,
the controller waits half of a complete cycle before executing
a 12.5mV change. If during the half-cycle wait period, the
difference between DAC level and the new VID code
changes sign, no change is made. If the VID code is more
than 1 bit higher or lower than the DAC (not recommended),
the controller will execute 12.5mV changes six times per
cycle until VID and DAC are equal. It is for this reason that it
is important to carefully control the rate of VID stepping in 1bit increments.
In order to ensure the smooth transition of output voltage
during VID change, a VID step change smoothing network is
required for an ISL6556B based voltage regulator. This
network is composed by a 1kΩ internal resistor between the
output of DAC and the C
The selection of C
REF
between REF pin to ground.
REF
is based on the time durati on for 1 bit
VID change and the allowable delay time.
Assuming the microprocessor controls the VID change at 1
bit every T
, the relationship between C
VID
REF
and T
VID
is
given by Equation 9.
C
REF
0.004X T
=
VID
(EQ. 9)
As an example, for a VID step change rate of 5µs per bit, the
value of C
is 22nF based on Equation 9.
REF
Temperature Compensation
The MOSFET r
DS(ON)
temperature. This means that a circuit using r
sense channel current is subject to a corresponding error in
current measurement. In order to compensate for this
temperature-related error, a temperature compensation
circuit is provided within ISL6561. This circuit senses the
internal IC temperature and, based on a resistor-selectable
scaling factor, adjust the droop current flow to the FB pin.
When the TCOMP resistor is properly selected, the droop
current can accurately represent the load current to achieve
a linear, temperature-independant load line.
The value of the Tcomp resistor can be determined using
Equation 10.
α
R
TCOMP
--------------------- -=
KTK
In Equation 10, K
between the ISL6561 and the lower MOSFET. It represents
how closely the controller temperature tracks the lower
MOSFET temperature. The value of K
75% and 100%. K
transconductance of internal compensation circuit. Its value
varies in proportion to varying
DS(ON)
TC
is the temperature coupling coefficient
T
is typically between
is the temperature dependant
TC
T
to
(EQ. 10)
is designed as 1µA/V/°C. The temperature coefficient of
MOSFET r
is given by . This is the ratio of the
DS(ON)
α
change in resistance and the change in temperature.
Resistance is normalized to the value at 25°C and the value
of is typically between 0.35%/°C and 0.50%/°C.
α
According to Equation 10, a voltage regulator with 80%
thermal coupling coefficient between the controller and lower
MOSFET and 0.4%/°C temperature coefficient of MOSFET
r
requires a 5kΩ TCOMP resistor.
DS(ON)
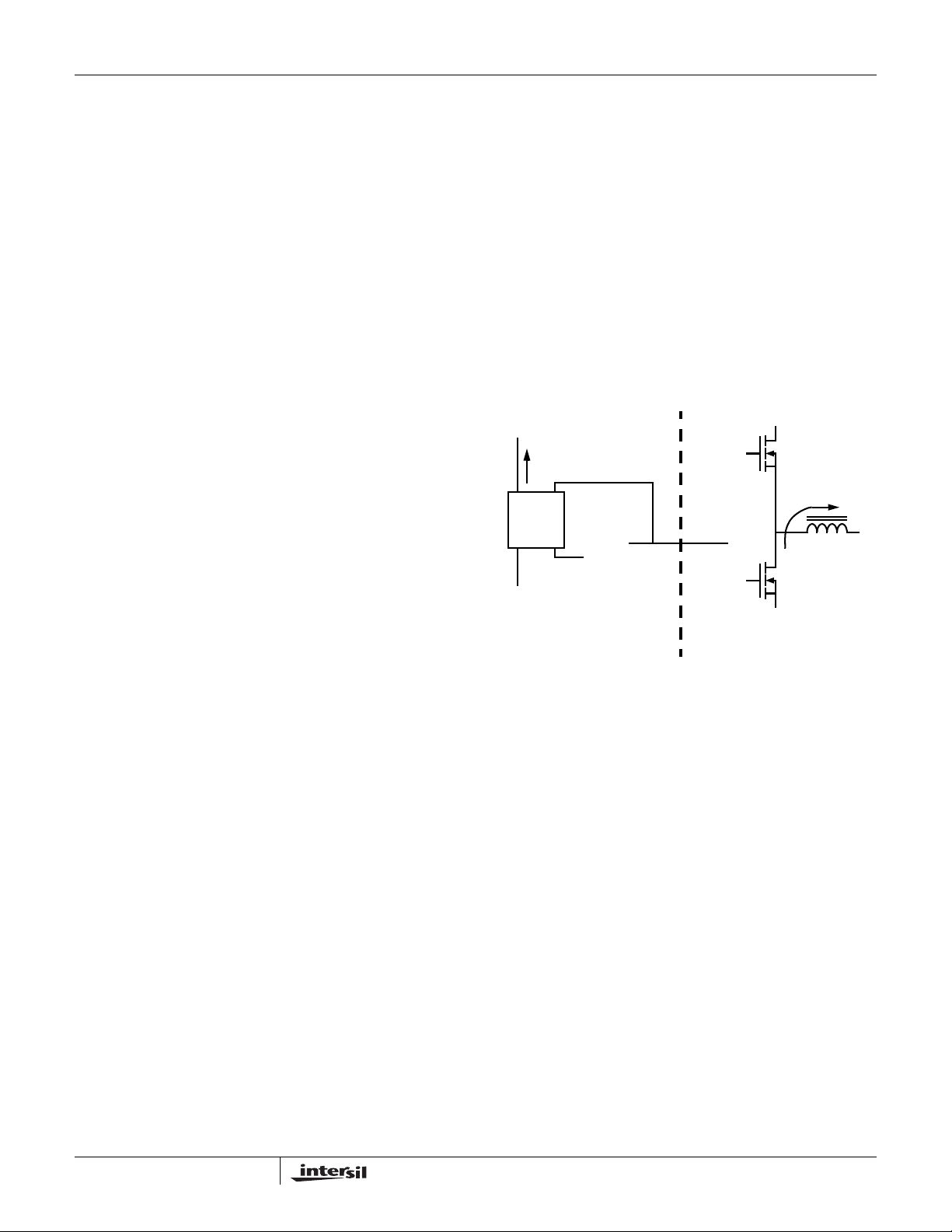
Initialization
Prior to initialization, proper conditions must exist on the
enable inputs and VCC. When the condi tions are met, the
controller begins soft-start. Once the output voltage is within
the proper window of operation, PGOOD asserts logic.
Enable and Disable
While in shutdown mode, the PWM outputs are held in a
high-impedance state to assure the drivers remain off. The
following input conditions must be met before the ISL6556B
is released from shutdown mode.
1. The bias voltage applied at VCC must reach the internal
power-on reset (POR) rising threshold. Once this
threshold is reached, proper operation of all aspects of
the ISL6556B is guaranteed. Hysteresis between the
rising and falling thresholds assure that once enabled,
the ISL6556B will not inadvertently turn off unless the
bias voltage drops substantially (see Electrical
Specifications).
EXTERNAL CIRCUITISL6556B INTERNAL CIRCUIT
VCC
POR
CIRCUIT
SOFT-START
AND
FAULT L OGIC
FIGURE 8. POWER SEQUENCING USING THRESHOLD-
SENSITIVE ENABLE (EN) FUNCTION
ENABLE
COMPARATOR
+
-
1.24V
EN
ENLL
(ISL6556BCR ONLY)
2. The ISL6556B features an enable input (EN) for power
sequencing between the controller bias voltage and
another voltage rail. The enable comparator holds the
ISL6556B in shutdown until the voltage at EN rises above
1.24V. The enable comparator has about 100mV of
hysteresis to prevent bounce. It is important that the
+12V
10.7kΩ
1.40kΩ
15
FN9097.4
December 28, 2004

ISL6556B
driver ICs reach their POR level before the ISL6556B
becomes enabled. The schematic in Figure 8
demonstrates sequencing the ISL6556B with the
HIP660X family of Intersil MOSFET drivers, which require
12V bias.
3. (ISL6556BCR only) The voltage on ENLL must be logic
high to enable the controller. This pin is typically
connected to the VID_PGOOD. The ISL6556BBCR has
this signal internally connected high.
4. The VID code must not be 11111 1 or 111110. These
codes signal the controller that no load is present. The
controller will enter shut-down mode after receiving either
of these codes and will execute soft-start upon receiving
any other code. These codes can be used to enable or
disable the controller but it is not recommended. After
receiving one of these codes, the controller executes a
2-cycle delay before changing the ov ervoltage trip level to
the shut-down level and disabling PWM. Overvoltage
shutdown cannot be reset using one of these codes.
To enable the controller, VCC must be greater than the POR
threshold; the voltage on EN must be greater than 1.24V; For
ISL6556BCR, ENLL must be logic high; and VID cannot be
equal to 111111 or 111110. When each of these conditions
is true, the controller immediately begins the soft-start
sequence.
Soft-Start
During soft-start, th e DAC voltage ramps linearly from zero
to the programmed VID level. The PWM signals remain in
the high-impedance state until the controller detects that the
ramping DAC level has reached the output-voltage level.
This protects the system against the large, negative inductor
currents that would otherwise occur when starting with a preexisting charge on the output as the controller attempted to
regulate to zero volts at the beginning of the soft-start cycle.
The soft-start t i me, t
64 switching cycles followed by a linear ramp with a rate
determined by the switching period, 1/f
64 1280 VID⋅+
-----------------------------------------
t
=
SS
f
SW
, begins with a delay period equal to
SS
.
SW
(EQ. 11)
VOUT, 500mV/DIV
2ms/DIV
500µs/DIV
FIGURE 9. SOFT-START WA VEFORMS WITH AN UN-BIASED
OUTPUT. FSW = 500kHz
EN, 5V/DIV
Fault Monitoring and Protection
The ISL6556B actively monitors output voltage and current
to detect fault conditions. Fault monitors trigger protective
measures to prevent damage to a microprocessor load. One
common power good indicator is provided for linking to
external system monitors. The schematic in Figure 10
outlines the interaction between the f ault monito rs and the
power good signal.
PGOOD
100µA
UV
+
75%
DAC
REFERENCE
-
SOFT-START, FAULT
AND CONTROL LOGIC
-
OC
+
I
1
REPEAT FOR
EACH CHANNEL
-
OC
+
100µA
I
AVG
For example, a regulator with 250kHz switching frequency
having VID set to 1.35V has t
equal to 6.912ms.
SS
A 100mV offset exists on the remote-sense amplifier at the
beginning of soft-start and ramps to zero during the first 640
cycles of soft-start (704 cycles following enable). This
prevents the large inrush current that would otherwise occur
should the output voltage start out with a slight negative
bias.
During the first 640 cycles of soft-start (704 cycles following
enable) the DAC voltage increments the reference in 25mV
steps. The remainder of soft-start sees the DAC ramping
with 12.5mV steps.
16
VDIFF
+
OV
OVP
-
VID + 0.2V
FIGURE 10. POWER GOOD AND PROTECTION CIRCUITRY
Power Good Signal
The power good pin (PGOOD) is an open-drain logic output
that transitions high when the converter is operating after
soft-start. PGOOD pulls low during shutdown and releases
high after a successful soft-start. PGOOD only transitions
low when an undervoltage condition is detected or the
controller is disabled by a reset from EN, ENLL, POR, or one
of the no-CPU VID codes. After an undervoltage event,
FN9097.4
December 28, 2004

ISL6556B
PGOOD will return high unless the controller ha s been
disabled. PGOOD does not automatically transition low upon
detection of an overvoltage condition.
Undervoltage Detection
The undervoltage threshold is set at 75% of the VID code.
When the output voltage at VSEN is below the undervoltage
threshold, PGOOD gets pulled low.
Overvoltage Protection
When VCC is above 1.4V, but otherwise not valid as defined
under Power on Reset in Electrical Specifications, the
overvoltage trip circuit is active using auxiliary circuitry. In
this state, an overvoltage trip occurs if the voltage at VSEN
exceeds 1.8V.
With valid VCC, the overvoltage circuit is sensitive to the
voltage at VDIFF. In this state, the trip level is 1.7V prior to
valid enable conditions being met as described in Enable
and Disable. The only exception to this is when the IC has
been disabled by an overvoltage trip. In that case the
overvoltage trip point is VID plus 200mV. During soft-start,
the overvoltage trip level is the higher of 1.7V or VID plus
200mV. Upon successful soft-start, the overvoltage trip level
is 200mV above VID . Two actions are taken by the ISL6556B
to protect the microprocessor load when an overvoltage
condition occurs.
At the inception of an overvoltage event, all PWM outputs
are commanded low until the voltage at VSEN falls below
0.6V with valid VCC or 1.5V otherwise. This causes the
Intersil drivers to turn on the lower MOSFETs and pull the
output voltage below a level that might cause damage to the
load. The PWM outputs remain low until VDIFF falls to the
programmed DAC level when they enter a high-impedance
state. The Intersil drivers respond to the high-impedance
input by turning off both upper and lower MOSFETs. If the
overvoltage condition reoccurs, the ISL6556B will again
command the lower MOSFETs to turn on. The ISL6556B will
continue to protect the load in this fashion as long as the
overvoltage condition recurs.
Simultaneous to the protective action of the PWM outputs, the
OVP pin pulls to VCC deli vering up to 100mA to the gate of a
crowbar MOSFET or SCR placed either on the input rail or the
output rail. Turning on the MOSFET or SCR collapses the
power rail and causes a fuse placed further up stream to blow .
The fuse must be sized such that the MOSFET or SCR will
not overheat bef ore the fuse b lo ws. The OVP pin is tolerant to
12V (see Absolute Maximum Ratings), so an external resistor
pull up can be used to augment the driving capability. If using
a pull up resistor in conjunction with the internal overvoltage
protection function, care must be taken to av oid nuisance trips
that could occur when VCC is below 2V. In that case, the
controller is incapable of holding OVP low .
Once an overvoltage condition is detected, normal PWM
operation ceases until the ISL6556B is reset. Cycling the
voltage on EN or ENLL or VCC below the POR-falling
threshold will reset the controller. Cycling the VID codes will
not reset the controller.
Overcurrent Protection
ISL6556B has two levels of overcurren t protection . Each
phase is protected from a sustained overcurrent condition on
a delayed basis, while the combined phase currents are
protected on an instantaneous basis.
In instantaneous protection mode, the ISL6556B takes
advantage of the proportionality between the load current
and the average current, I
condition. See the Channel-Current Balance section for
more detail on how the average current is measured. The
average current is continually compared with a constant
100µA reference current as shown in Figure 10. Once the
average current e xceeds the reference current, a comparator
triggers the converter to shutdown.
In individual overcurrent protection mode, the ISL6556B
continuously compares the current of each channel with the
same 100µA reference current. If any channel current exceeds
the reference current continuously for eight consecutiv e cycles,
the comparator triggers the converter to shutdown.
At the beginning of overcurrent shutdown, the controller
places all PWM signals in a high-impedance state
commanding the Intersil MOSFET driver ICs to turn off both
upper and lower MOSFETs. The system remains in this
state a period of 4096 switching cycles. If the controller is still
enabled at the end of this wait period, it will attempt a softstart. If the fault remains, the trip-retry cycles will continue
indefinitely (as shown in Figure 11) until either controller is
disabled or the fault is cleared. Note that the energy
delivered during trip-retry cycling is much less than during
full-load operation, so there is no thermal hazard during this
kind of operation.
OUTPUT CURRENT, 50A/DIV
0A
OUTPUT VOLTAGE,
500mV/DIV
0V
FIGURE 11. OVERCURRENT BEHAVIOR IN HICCUP MODE.
F
= 500kHz
SW
, to detect an overcurrent
AVG
2ms/DIV
17
FN9097.4
December 28, 2004

18

ISL6556B
Current Sensing
The ISEN pins are denoted ISEN1, ISEN2, ISEN3 and
ISEN4. The resistors connected between these pins and the
respective phase nodes determine the gains in the load-line
regulation loop and the channel-current balance loop as well
as setting the overcurrent trip point. Select values for these
resistors based on the room temperature r
lower MOSFETs; the full-load operating current, I
number of phases, N using Equation 18 (see also Figure 3).
R
ISEN
r
DS ON()
-----------------------
70 10
I
FL
------- -=
–
6
N
×
In certain circumstances, it may be necessary to adjust the
value of one or more ISEN resistor . When the compone nts of
one or more channels are inhibited from effectiv ely dissipating
their heat so that the affected channels run hotter than
desired, choose new, smaller values of R
ISEN
phases (see the section entitled Channel-Current Balance).
Choose R
in proportion to the desired decrease in
ISEN,2
temperature rise in order to cause proportionally less current
to flow in the hotter phase.
∆T
R
ISEN 2,
R
ISEN
----------=
∆T
2
1
of the
DS(ON)
; and the
FL
(EQ. 18)
for the affected
(EQ. 19)
regulator employs the optional load-line regulation as
described in Load-Line Regulation.
COMPENSATING LOAD-LINE REGULATED
CONVERTER
The load-line regulated converter behaves in a similar
manner to a peak-current mode controller because the two
poles at the output-filter L-C resonant frequency split with
the introduction of current information into the control loop.
The final location of these poles is determined by the system
function, the gain of the current signal, and the value of the
compensation components, R
C2 (OPTIONAL)
R
C
+
R
FB
V
DROOP
-
C
C
and CC.
C
COMP
VDIFF
FB
ISL6556B
In Equation 19, make sure that ∆T
rise above the ambient temperature , and ∆T
is the desired temperature
2
is the measured
1
temperature rise above the ambient temperature. Whi le a
single adjustment according to Equation 19 is usually
sufficient, it may occasionally be necessary to adjust R
ISEN
two or more times to achiev e opti mal thermal balance
between all channels.
Load-Line Regulation Resistor
The load-line regulation resistor is labeled RFB in Figure 5.
Its value depends on the desired full-load droop voltage
(V
DROOP
in Figure 5). If Equation 19 is used to select each
ISEN resistor, the load-line regulation resistor is as shown
in Equation 20.
V
FB
DROOP
------------------------ -=
70 106–×
(EQ. 20)
R
If one or more of the ISEN resistors is adjusted for thermal
balance, as in Equation 20, the load-line regulation resistor
should be selected according to Equation 21 where I
full-load operating current and R
connected to the n
V
DROOP
-------------------------------- R
=
R
FB
IFLr
th
DS ON()
∑
ISEN pin.
ISEN n()
n
is the ISEN resistor
ISEN(n)
is the
FL
(EQ. 21)
Compensation
The two opposing goals of compensating the voltage
regulator are stability and speed. Depending on whether the
FIGURE 12. COMPENSATION CONFIGURA TION FOR
LOAD-LINE REGULATED ISL6556B CIRCUIT
Since the system poles and zero are effected by the values
of the components that are meant to compensate them, the
solution to the system equation becomes fairly complicated.
Fortunately there is a simple approximation that comes very
close to an optimal solution. Treating the system as though it
were a voltage-mode regulator by compensating the L-C
poles and the ESR zero of the voltage-mode approximation
yields a solution that is always stable with very close to ideal
transient performance.
The feedback resistor, R
, has already been chosen as
FB
outlined in Load-Line Regulation Resistor. Select a target
bandwidth for the compensated system, f
. The target
0
bandwidth must be large enough to assure adequate
transient performance, but smaller than 1/3 of the perchannel switching frequency. The values of the
compensation components depend on the relationships of f
to the L-C pole frequency and the ESR zero frequency. For
each of the following three, there is a separate set of
equations for the compensation components.
1
>
Case 1:
------------------- f
2π LC
R
CRFB
------------------------------------=
C
C
2π V
0
2π f
----------------------------------- -=
0.75V
0.75V
PPRFBf0
0Vpp
IN
LC
IN
0
19
FN9097.4
December 28, 2004

ISL6556B
.
Case 2:
Case 3:
1
-------------------
2π LC
R
CRFB
-------------------------------------------------------------=
C
C
2π()
------------------------------>
f
0
2π C ESR()
R
CRFB
0.75V
C
-------------------------------------------------=
C
2π V
f
0
1
1
------------------------------<≤
2π C ESR()
V
2π()
PP
--------------------------------------------=
0.75 V
0.75V
2
2
f
VPPRFBLC
0
2π f
0Vpp
------------------------------------------=
0.75 V
IN
ESR()C
IN
PPRFBf0
2
2
f
LC
0
IN
IN
L
ESR()
L
(EQ. 22)
In Equations 22, L is the per-channel filter inductance
divided by the number of active channels; C is the sum total
of all output capacitors; ESR is the equivalent-series
resistance of the bulk output-filter capacitance; and V
PP
is
the peak-to-peak sawtooth signal amplitude as described in
Figure 4 and Electrical Specifications.
Once selected, the compensation values in Equations 22
assure a stable converter with reasonable transient
performance. In most cases, transient performance can be
improved by making adjustments to R
value of R
while observing the transient performance on an
C
. Slowly increase the
C
oscilloscope until no further improvement is noted. Normally,
C
will not need adjustment. Keep the value of CC from
C
Equations 22 unless some performance issue is noted.
The optional capacitor C
, is sometimes needed to bypass
2
noise away from the PWM comparator (see Figure 12). Keep
a position available for C
, and be prepared to install a high-
2
frequency capacitor of between 22pF and 150pF in case any
leading-edge jitter problem is noted.
Output Filter Design
The output inductors and the output capacitor bank together
to form a low-pass filter responsible for smoothing the
pulsating voltage at the phase nodes. The output filter also
must provide the transient energy until the regulator can
respond. Because it has a low bandwidth compared to the
switching frequency, the output filter necessarily limits the
system transient response. The output capacitor must
supply or sink load current while the current in the output
inductors increases or decreases to meet the dema n d.
In high-speed converters, the output capacitor ban k is usually
the most costly (and often the largest) part of the circuit.
Output filter design begins with minimizing the cost of this part
of the circuit. The critical load parameters in choosing the
output capacitors are the maximum size of the load step, ∆I;
the load-current slew rate, di/dt; and the maxim um al lo wable
output-voltage de viati on under tr an sient loadi ng, ∆V
Capacitors are characterized according to their capacitance,
ESR, and ESL (equivalent series inductance).
MAX
.
At the beginning of the load transient, the output capacitors
supply all of the transient current. The output voltage will
initially deviate by an amount approximated by the voltage
drop across the ESL. As the load current increases, the
voltage drop across the ESR increases linearly until the load
current reaches its final value. The capacitors selected must
have sufficiently low ESL and ESR so that the total outputvoltage deviation is less than the allowable maximum.
Neglecting the contribution of inductor current and regulator
response, the output voltage initially deviates by an amount
∆V ESL()
di
----- ESR()∆I+≈
dt
(EQ. 23)
The filter capacitor must have sufficiently low ESL and ESR
so that ∆V < ∆V
MAX
.
Most capacitor solutions rely on a mixture of high-frequency
capacitors with relatively low capacitance in combination
with bulk capacitors having high capacitance but limited
high-frequency performance. Minimizing the ESL of the highfrequency capacitors allows them to support the output
voltage as the current increases. Minimizing the ESR of the
bulk capacitors allows them to supply the increased current
with less output voltage deviation.
The ESR of the bulk capacitors also creates the majority of
the output-voltage ripple. As the bulk capacitors sink and
source the inductor ac ripple current (see Interleaving and
Equation 2), a voltage develops across the bulk-capacitor
ESR equal to I
(ESR). Thus, once the output capacitors
C,PP
are selected, the maximum allowable ripple voltage,
V
PP(MAX)
L ESR()
, determines the lower limit on the inductance.
V
–
INNVOUT
------------------------------------------------------------≥
fSVINV
V
OUT
PP MAX()
(EQ. 24)
Since the capacitors are supplying a decreasing portion of
the load current while the regulator recovers from the
transient, the capacitor voltage becomes slightly depleted.
The output inductors must be capable of assuming the entire
load current before the output voltage decreases more than
∆V
. This places an upper limit on inductance.
MAX
Equation 25 gives the upper limit on L for the cases when the
trailing edge of the current transient causes a greater outputvoltage deviation than the leading edge. Equation 26
addresses the leading edge. Normally, the trailing edge
dictates the selection of L because duty cycles are usually
less than 50%. Nevertheless, both inequalities should be
evaluated, and L should be selected based on the lower of
the two results. In each equation, L is the per-channel
inductance, C is the total output capacitance, and N is the
number of active channels.
2NCV
L
--------------------- ∆ V
()
∆I
()
1.25
≤
L
------------------------- - ∆V
()
∆I
O
2
NC
2
MAX
MAX
∆I ESR()–≤
∆IESR()– V
–
INVO
(EQ. 25)
(EQ. 26)
20
FN9097.4
December 28, 2004

ISL6556B
Input Supply Voltage Selection
The VCC input of the ISL6556B can be connected either
directly to a +5V supply or through a current limiting resistor to
a +12V supply. An integrated 5.8V shunt regulator maintains
the voltage on the VCC pin when a +12V supply i s used. A
300Ω resistor is suggested for limiting the current into the
VCC pin to a worst-case maximum of approximately 25mA.
Switching Frequency
There are a number of variables to consider when choosing
the switching frequency, as there are considerable effects on
the upper-MOSFET loss calculation. These effects are
outlined in MOSFETs, and they establish the upper limit for
the switching frequency . The lo wer limit is established by the
requirement for fast transient response and small outputvoltage ripple as outlined in Output Filter Design. Choose the
lowest switching frequency that allows the regulator to meet
the transient-response requirements.
Switching frequency is determined by the selection of the
frequency-setting resistor, R
Typical Application on pages 4 and 5). Figure 13 and
Equation 27 are provided to assist in selecting the correct
value for R
R
=
T
.
T
1.0203 10()
10.6258- 1.03167()fS()log[]
(see the figures labeled
T
·
1200–
(EQ. 27)
Select a bulk capacitor with a ripple current rating which will
minimize the total number of input capacitors required to
support the RMS current calculated. The voltage rating of
the capacitors should also be at least 1.25 times greater
than the maximum input voltage.
Figures 15 and 16 provide the same input RMS current
information for three and four phase designs respectively.
Use the same approach to selecting the bulk capacitor type
and number as described above.
Low capacitance, high-frequency ceramic capacitors are
needed in addition to the bulk capacitors to suppress leading
and falling edge voltage spikes. The result from the high
current slew rates produced by the upper MOSFETs turn on
and off. Select low ESL ceramic capacitors and place one as
close as possible to each upper MOSFET drain to minimize
board parasitic impedances and maximize suppression.
0.3
)
O
/ I
RMS
0.2
1000
(kΩ)
100
T
R
10
100 1000 1000010
SWITCHING FREQUENCY (kHz)
FIGURE 13. RT vs SWITCHING FREQUENCY
Input Capacitor Selection
The input capacitors are responsible for sourcing the ac
component of the input current flowing into the upper
MOSFETs. Their RMS current capacity must be sufficient to
handle the ac component of the current drawn by the upper
MOSFETs which is related to duty cycle and the number of
active phases.
For a two phase design, use Figure 14 to determine the
input-capacitor RMS current requirement given the duty
cycle, maximum sustained output current (I
of the per-phase peak-to-peak inductor current (I
), and the ratio
O
L,PP
) to IO.
0.1
I
= 0
L,PP
= 0.5 I
I
L,PP
I
L,PP
INPUT-CAPACITOR CURRENT (I
0
00.4 1.00.2 0.6 0.8
= 0.75 I
O
O
DUTY CYCLE (V
O
/ VIN)
FIGURE 14. NORMALIZED INPUT -CAP A CIT OR RMS CURRENT
vs DUTY CYCLE FOR 2-PHASE CONVERTER
0.3
I
= 0
L,PP
)
I
O
/ I
RMS
0.2
0.1
INPUT-CAPACITOR CURRENT (I
= 0.25 I
L,PP
0
00.4 1.00.2 0.6 0 .8
O
I
= 0.5 I
L,PP
I
L,PP
DUTY CYCLE (VO / VIN)
= 0.75 I
O
O
FIGURE 15. NORMALIZED INPUT -CAP A CIT OR RMS CURRENT
vs DUTY CYCLE FOR 3-PHASE CONVERTER
21
FN9097.4
December 28, 2004

)
O
/I
RMS
INPUT-CAPACITOR CURRENT (I
00.4 1.00.2 0.6 0 .8
DUTY CYCLE (V
FIGURE 16. NORMALIZED INPUT -CAP A CIT OR RMS CURRENT
vs DUTY CYCLE FOR 4-PHASE CONVERTER
O/VIN
)
MULTI-PHASE RMS IMPROVEMENT
Figure 17 is provided as a reference to demonstrate the
dramatic reductions in input-capacitor RMS current upon the
implementation of the multi-phase topology. For example,
compare the input rms current requirements of a two-phase
converter versus that of a single phase. Assume both
converters have a duty cycle of 0.25, maximum sustained
output current of 40A, and a ratio of I
to IO of 0.5. The
C,PP
single phase converter would require 17.3 Arms current
capacity while the two-phase converter would only require
10.9 Arms. The advantages become even more pronounced
when output current is increased and additional phases are
added to keep the component cost down relative to the
single phase approach.
Layout Considerations
The following layout strategies are intended to minimize the
impact of board parasitic impedances on converter
performance and to optimize the heat-dissipating capabilities
of the printed-circuit board. These sections highlight some
important practices which should not be overlooked during the
layout process .
Component Placement
Within the allotted implementation area, orient the switching
components first. The switching components are the most
critical because they carry large amounts of energy and tend
to generate high levels of noise. Switching component
placement should take into account power dissipation. Align
the output inductors and MOSFETs such that space
between the components is minimized while creating the
PHASE plane. Place the Intersil MOSFET driver IC as close
as possible to the MOSFETs they control to reduce the
parasitic impedances due to trace length between critical
driver input and output signals. If possible, duplicate the
same placement of these components for each phase.
Next, place the input and output capacitors. Position one
high-frequency ceramic input capacitor next to each upper
MOSFET drain. Place the bulk input capacitors as close to
the upper MOSFET drains as dictated by the component
size and dimensions. Long distances between input
capacitors and MOSFET drains result in too much trace
inductance and a reduction in capacitor performance. Locate
the output capacitors between the inductors and the load,
while keeping them in close proximity to the microprocessor
socket.
The ISL6556A can be placed off to one side or centered
relative to the individual phase switching components.
Routing of sense lines and PWM signals will guide final
placement. Critical small signal components to place close
to the controller include the ISEN resistors, R
feedback resistor, and compensation components.
resistor,
T
22
Bypass capacitors for the ISL6556A and HIP660X driver
bias supplies must be placed next to their respective pins.
Trace parasitic impedances will reduce their effectiveness.
Plane Allocation and Routing
Dedicate one solid layer , usually a middle la y er, for a ground
plane. Make all critical component ground connections with
vias to this plane. Dedicate one additional layer for power
planes; breaking the plane up into smaller islands of
common voltage. Use the remaining layers for signal wiring.
Route phase planes of copper filled polygons on the top and
bottom once the switching component placement is set. Size
the trace width between the driver gate pins and the
MOSFET gates to carry 1A of current. When routing
components in the switching path, use short wide traces to
reduce the associated parasitic impedances.
FN9097.4
December 28, 2004

Small Outline Plastic Packages (SOIC)
N
INDEX
AREA
E
-B-
ISL6556B
123
-AD
L
α
e
0.25(0.010) C AM BS
NOTES:
1. Symbols are defined in the “MO Series Symbol List” in Section 2.2
of Publication Number 95.
2. Dimensioning and tolerancing per ANSI Y14.5M-1982.
3. Dimension “D” does not include mold flash, protrusions or gate
burrs. Mold flash, protrusion and gate burrs shall not exceed
0.15mm (0.006 inch) per side.
4. Dimension “E” does not include interlead flash or protrusions. Interlead flash and protrusions shall not exceed 0.25mm (0.010
inch) per side.
5. The chamfer on the body is optional. If it is not present, a visual
index feature must be located within the crosshatched area.
6. “L” is the length of terminal for soldering to a substrate.
7. “N” is the number of terminal positions.
8. Terminal numbers are shown for reference only.
9. The lead width “B”, as measured 0.36mm (0.014 inch) or greater
above the seating plane, shall not exceed a maximum value of
0.61mm (0.024 inch)
10. Controlling dimension: MILLIMETER. Converted inch dimensions are not necessarily exact.
23
FN9097.4
December 28, 2004

ISL6556B
Quad Flat No-Lead Plastic Package (QFN)
Micro Lead Frame Plastic Package (MLFP)
L32.5x5B
32 LEAD QUAD FLAT NO-LEAD PLASTIC PACKAGE
(COMPLIANT TO JEDEC MO-220VHHD-2 ISSUE C
MILLIMETERS
SYMBOL
A 0.80 0.90 1.00 A1 - - 0.05 A2 - - 1.00 9
A3 0.20 REF 9
b 0.18 0.23 0.30 5,8
D 5.00 BSC D1 4.75 BSC 9
D2 3.15 3.30 3.45 7,8
E 5.00 BSC E1 4.75 BSC 9
E2 3.15 3.30 3.45 7,8
e 0.50 BSC -
k0.25 - - -
L 0.30 0.40 0.50 8
L1 - - 0.15 10
N322
Nd 8 3
Ne 8 3
P- -0.609
θ --129
NOTES:
1. Dimensioning and tolerancing conform to ASME Y14.5-1994.
2. N is the number of terminals.
3. Nd and Ne refer to the number of terminals on each D and E.
4. All dimensions are in millimeters. Angles are in degrees.
5. Dimension b applies to the metallized terminal and is measured
between 0.15mm and 0.30mm from the terminal tip.
6. The configuration of the pin #1 identifier is optional, but must be
located within the zone indicated. The pin #1 identifier may be
either a mold or mark feature.
7. Dimensions D2 and E2 are for the exposed pads which provide
improved electrical and thermal performance.
8. Nominal dimensions are provided to assist with PCB Land Pattern
Design efforts, see Intersil Technical Brief TB389.
9. Features and dimensions A2, A3, D1, E1, P & θ are present when
Anvil singulation method is used and not present for saw
singulation.
10. Depending on the method of lead termination at the edge of the
package, a maximum 0.15mm pull back (L1) maybe present. L
minus L1 to be equal to or greater than 0.3mm.
NOTESMIN NOMINAL MAX
Rev. 1 10/02
All Intersil U.S. products are manufactured, assembled and tested utilizing ISO9000 quality systems.
Intersil Corporation’s quality certifications can be viewed at www.intersil.com/design/quality
Intersil products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design, software and/or specifications at any time without
notice. Accordingly, the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and
reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result
from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see www.intersil.com
24
FN9097.4
December 28, 2004
 Loading...
Loading...