

®
R
P
E
T
E
L
O
S
B
O
N
E
M
M
O
C
E
R
R
D
E
D
66
P
I
H
C
LA
P
E
Data Sheet August 2004
I
H
,
B
1
0
T
C
U
D
O
M
E
66
P
E
03
R
P
T
N
B
T
C
U
D
O
HIP6601A, HIP6603A, HIP6604
FN4884.5
Synchronous Rectified Buck MOSFET
Drivers
The HIP6601A, HIP6603A and HIP6604 are high frequency,
dual MOSFET drivers specifically designed to drive two
power N-Channel MOSFETs in a synchronous rectified buck
converter topology. These drivers combined with a HIP63xx
or an ISL65xx Multi-Phase Buck PWM controller form a
complete core-voltage regulator solution for advanced
microprocessors.
The HIP6601A drives the lower gate in a synchronous
rectifier to 12V, while the upper gate can be independently
driven over a range from 5V to 12V. The HIP6603A drives
both upper and lower gates over a range of 5V to 12V. This
drive-voltage flexibility provides the advantage of optimizing
applications involving trade-offs between switching losses
and conduction losses. The HIP6604 can be configured as
either a HIP6601A or a HIP6603A.
The output drivers in the HIP6601A, HIP6603A and HIP6604
have the capacity to efficiently switch power MOSFETs at
frequencies up to 2MHz. Each driver is capable of driving a
3000pF load with a 30ns propagation delay and 50ns
transition time. These products implement bootstrapping on
the upper gate with only an external capacitor required. This
reduces implementation complexity and allows the use of
higher performance, cost effective, N-Channel MOSFETs.
Adaptive shoot-through protection is integrated to prevent
both MOSFETs from conducting simultaneously.
Features
• Drives Two N-Channel MOSFETs
• Adaptive Shoot-Through Protection
• Internal Bootstrap Device
• Supports High Switching Frequency
- Fast Output Rise Time
- Propagation Delay 30ns
• Small 8 Lead SOIC and EPSOIC and 16 Lead QFN
Packages
• Dual Gate-Drive Voltages for Optimal Efficiency
• Three-State Input for Output Stage Shutdown
• Supply Under Voltage Protection
Applications
• Core Voltage Supplies for Intel Pentium® III, AMD®
Athlon™ Microprocessors
• High Frequency Low Profile DC-DC Converters
• High Current Low Voltage DC-DC Converters
Related Literature
• Technical Brief TB363 “Guidelines for Handling and
Processing Moisture Sensitive Surface Mount Devices
(SMDs)”
Pinouts
HIP6601ACB, HIP6603ACB (SOIC)
HIP6601ECB, HIP6603ECB (EPSOIC)
TOP VIEW
Ordering Information
TEMP. RANGE
o
PART NUMBER
HIP6601ACB 0 to 85 8 Ld SOIC M8.15
HIP6603ACB 0 to 85 8 Ld SOIC M8.15
HIP6601ACB-T 8 Ld SOIC Tape and Reel
HIP6603ACB-T 8 Ld SOIC Tape and Reel
HIP6601ECB 0 to 85 8 Ld EPSOIC M8.15B
HIP6603ECB 0 to 85 8 Ld EPSOIC M8.15B
HIP6601ECB-T 8 Ld EPSOIC Tape and Reel
HIP6603ECB-T 8 Ld EPSOIC Tape and Reel
HIP6604CR 0 to 85
HIP6604CR-T 16 Ld 4x4 QFN Tape and Reel
(
C) PACKAGE
16 Ld 4x4 QFN
1
PKG.
DWG. #
L16.4x4
UGATE
NC
BOOT
PWM
GND
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
1-888-INTERSIL or 321-724-7143 | Intersil (and design) is a registered trademark of Intersil Americas Inc.
Copyright © Intersil Americas Inc. 2003, 2004. All Rights Reserved.
All other trademarks mentioned are the property of their respective owners.
BOOT
PWM
GND
1
2
3
4
1
2
3
4
HIP6604 (QFN)
TOP VIEW
UGATENCPHASE
15
16 14 13
6578
NC
PGND
LGATE
8
7
6
5
NC
NC
PHASE
PVCC
VCC
LGATE
12
NC
PVCC
11
10
LVCC
9
VCC
ti
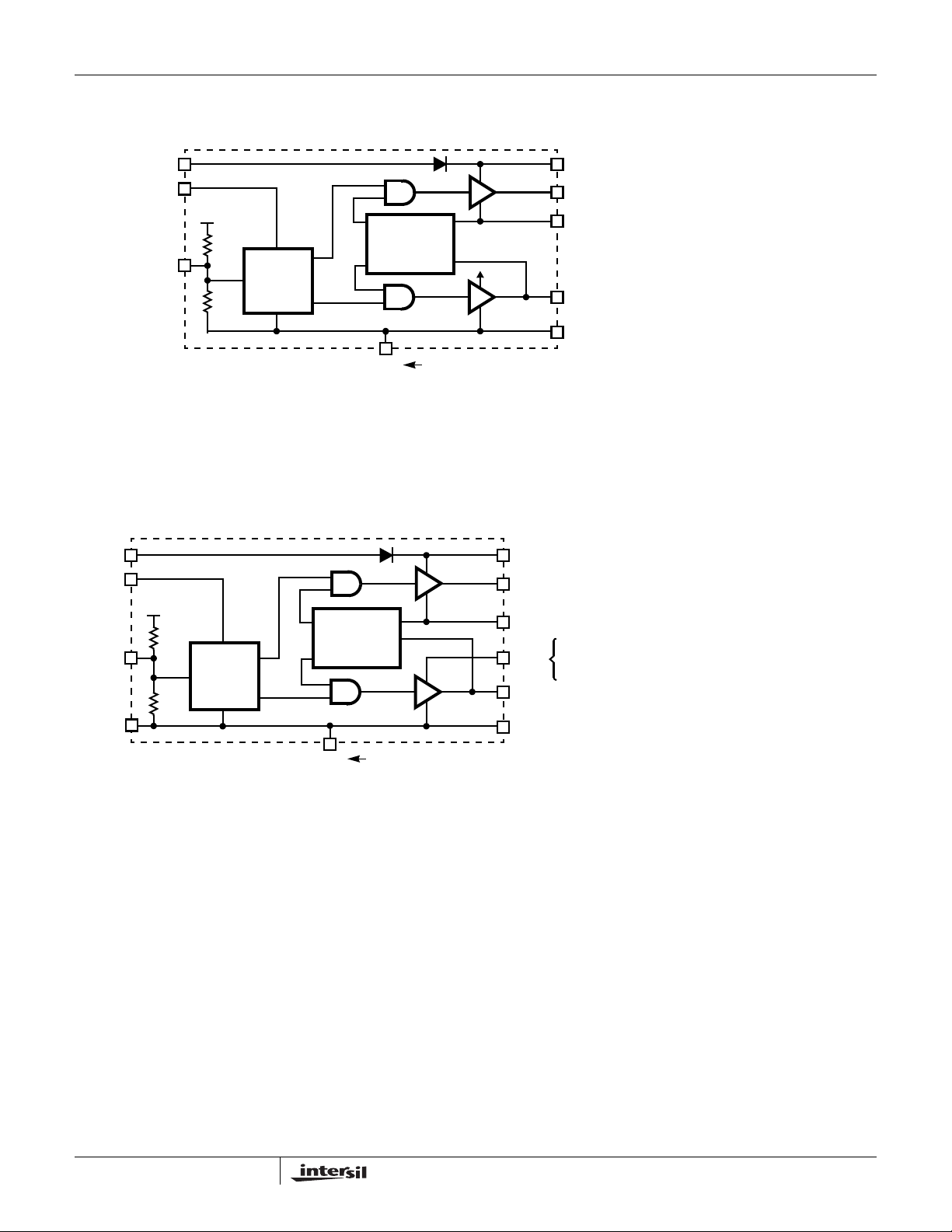
Block Diagrams
HIP6601A, HIP6603A, HIP6604
HIP6601A AND HIP6603A
PVCC
VCC
PWM
GND
PVCC
VCC
PWM
+5V
10K
10K
+5V
10K
10K
CONTROL
LOGIC
CONTROL
LOGIC
PROTECTION
PAD
SHOOT-
THROUGH
PROTECTION
BOOT
UGATE
SHOOT-
THROUGH
†
FOR HIP6601ECB AND HIP6603ECB DEVICES, THE PAD ON THE BOTTOM
SIDE OF THE PACKAGE MUST BE SOLDERED TO THE PC BOARD.
PHASE
LGATE
GND
† VCC FOR HIP6601A
PVCC FOR HIP6603A
HIP6604 QFN PACKAGE
BOOT
UGATE
PHASE
CONNECT LVCC TO VCC FOR HIP6601A CONFIGURATION
LVCC
CONNECT LVCC TO PVCC FOR HIP6603A CONFIGURATION.
LGATE
PGND
PAD
PAD ON THE BOTTOM SIDE OF THE PACKAGE MUST BE SOLDERED TO THE PC BOARD
2
HIP6601A, HIP6603A, HIP6604
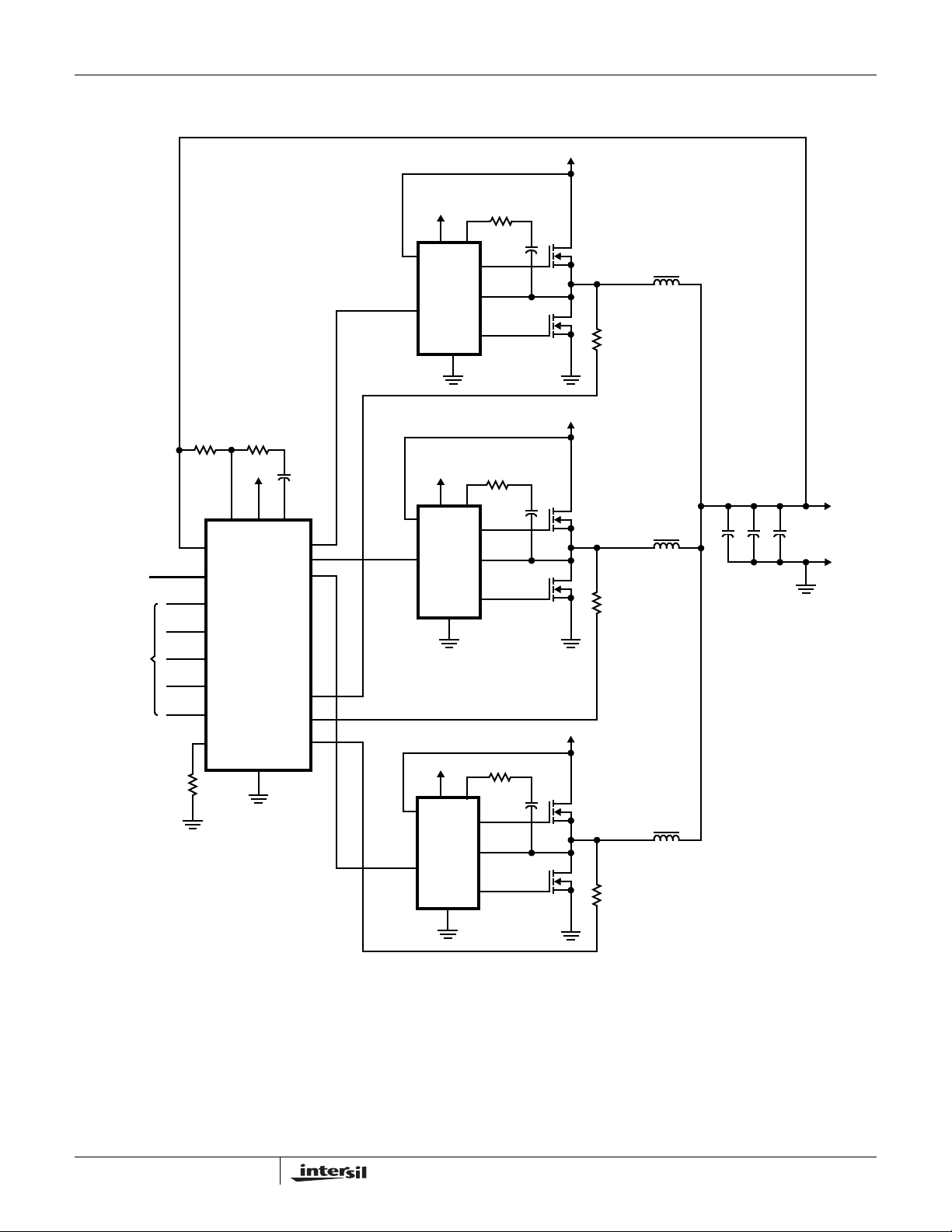
Typical Application - 3 Channel Converter Using HIP6301 and HIP6601A Gate Drivers
+12V
+5V
BOOT
VCC
PWM
PVCC
DRIVE
HIP6601A
UGATE
PHASE
LGATE
+12V
PGOOD
VID
VFB
VSEN
FS
+5V
VCC
MAIN
CONTROL
HIP6301
GND
COMP
PWM1
PWM2
PWM3
ISEN1
ISEN2
ISEN3
VCC
PWM
VCC
PWM
+5V
PVCC
DRIVE
HIP6601A
+5V
PVCC
DRIVE
HIP6601A
BOOT
UGATE
PHASE
LGATE
BOOT
UGATE
PHASE
LGATE
+12V
+V
CORE
3

HIP6601A, HIP6603A, HIP6604
Absolute Maximum Ratings Thermal Information
Supply Voltage (VCC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15V
Supply Voltage (PVCC) . . . . . . . . . . . . . . . . . . . . . . . . . VCC + 0.3V
BOOT Voltage (V
Input Voltage (V
UGATE. . . . . . .V
. . . . . . . . . . . V
LGATE. . . . . . . . . GND - 5V(<400ns pulse width) to V
. . . . . . . . . . . . . . GND - 3.0V(>400ns pulse width) to V
PHASE. . . . . . . . . . . . . . . . . .GND - 5V(<400ns pulse width) to 15V
- V
BOOT
) . . . . . . . . . . . . . . . . . . . . . .GND - 0.3V to 7V
PWM
- 5V(<400ns pulse width) to V
PHASE
- 3.0V(>400ns pulse width) to V
PHASE
) . . . . . . . . . . . . . . . . . . . . . . .15V
PHASE
BOOT
BOOT
PVCC
PVCC
+ 0.3V
+ 0.3V
+ 0.3V
+ 0.3V
. . . . . . . . . . . . . . . . . . . . . . GND - 0.3V(>400ns pulse width) to 15V
ESD Rating
Human Body Model (Per MIL-STD-883 Method 3015.7). . . . .3kV
Machine Model (Per EIAJ ED-4701 Method C-111) . . . . . . .200V
CAUTION: Stresses above those listed in “Absolute Maximum Ratings” may cause permanent damage to the device. This is a stress only rating and operation of the
device at these or any other conditions above those indicated in the operational sections of this specification is not implied.
NOTE:
1. θJA is measured with the component mounted on a high effective thermal conductivity test board in free air. See Tech Brief TB379 for details.
2. θJA is measured in free air with the component mounted on a high effective thermal conductivity test board with “direct attach” features. θ
“case temp” is measured at the center of the exposed metal pad on the package underside. See Tech Brief TB379.
Electrical Specifications Recommended Operating Conditions, Unless Otherwise Noted
PARAMETER SYMBOL TEST CONDITIONS MIN TYP MAX UNITS
VCC SUPPLY CURRENT
Bias Supply Current I
Upper Gate Bias Current I
VCC
PVCC
POWER-ON RESET
VCC Rising Threshold 9.7 9.95 10.4 V
VCC Falling Threshold 9.0 9.2 9.5 V
PWM INPUT
Input Current I
PWM
PWM Rising Threshold 3.45 3.6 - V
PWM Falling Threshold - 1.45 1.55 V
UGATE Rise Time t
LGATE Rise Time t
UGATE Fall Time t
LGATE Fall Time t
UGATE Turn-Off Propagation Delay t
LGATE Turn-Off Propagation Delay t
RUGATEVPVCC
RLGATEVPVCC
FUGATEVPVCC
FLGATE
PDLUGATEVPVCC
PDLLGATEVPVCC
Shutdown Window 1.4 - 3.6 V
Shutdown Holdoff Time - 230 - ns
OUTPUT
Upper Drive Source Impedance R
Upper Drive Sink Impedance R
Lower Drive Source Current I
Lower Drive Sink Impedance R
UGATEVPVCC
UGATEVPVCC
LGATE
LGATE
HIP6601A, f
HIP6603A, f
HIP6601A, f
HIP6603A, f
V
= 0 or 5V (See Block Diagram) - 500 - µA
PWM
= 12V, 3nF Load - 20 - ns
= 12V, 3nF Load - 50 - ns
= 12V, 3nF Load - 20 - ns
V
= 12V, 3nF Load - 20 - ns
PVCC
= 12V, 3nF Load - 30 - ns
= 12V, 3nF Load - 20 - ns
= 5V - 1.7 3.0 Ω
V
= 12V - 3.0 5.0 Ω
PVCC
= 5V - 2.3 4.0 Ω
V
= 12V - 1.1 2.0 Ω
PVCC
V
= 5V, HIP6603A 400 580 - mA
PVCC
V
= 12V, HIP6603A 500 730 - mA
PVCC
V
= 5V or 12V, HIP6601A 500 730 - mA
PVCC
V
= 5V or 12V - 1.6 4.0 Ω
PVCC
Thermal Resistance θJA (oC/W) θJC (oC/W)
SOIC Package (Note 1) 97 N/A
EPSOIC Package (Note 2). . . . . . . . . . 38 N/A
QFN Package (Note 2). . . . . . . . . . . . . 48 10
Maximum Junction Temperature (Plastic Package) . . . . . . . .150oC
Maximum Storage Temperature Range . . . . . . . . . -65oC to 150oC
Maximum Lead Temperature (Soldering 10s). . . . . . . . . . . . .300oC
(SOIC - Lead Tips Only)
For Recommended soldering conditions see Tech Brief TB389.
Operating Conditions
Ambient Temperature Range . . . . . . . . . . . . . . . . . . . . 0oC to 85oC
Maximum Operating Junction Temperature . . . . . . . . . . . . . 125oC
Supply Voltage, VCC. . . . . . . . . . . . . . . . . . . . . . . . . . . . 12V ±10%
Supply Voltage Range, PVCC . . . . . . . . . . . . . . . . . . . . . 5V to 12V
PWM
PWM
PWM
PWM
= 1MHz, V
= 1MHz, V
= 1MHz, V
= 1MHz, V
= 12V - 4.4 6.2 mA
PVCC
= 12V - 2.5 3.6 mA
PVCC
= 12V - 200 430 µA
PVCC
= 12V - 1.8 3.3 mA
PVCC
JC,
the
4

HIP6601A, HIP6603A, HIP6604
Functional Pin Description
UGATE (Pin 1), (Pin 16 QFN)
Upper gate drive output. Connect to gate of high-side power
N-Channel MOSFET.
BOOT (Pin 2), (Pin 2 QFN)
Floating bootstrap supply pin for the upper gate drive.
Connect the bootstrap capacitor between this pin and the
PHASE pin. The bootstrap capacitor provides the charge to
turn on the upper MOSFET. A resistor in series with boot
capacitor is required in certain applications to reduce ringing
on the BOOT pin. See the Internal Bootstrap Device section
under DESCRIPTION for guidance in choosing the
appropriate capacitor and resistor values.
PWM (Pin 3), (Pin 3 QFN)
The PWM signal is the control input for the driver. The PWM
signal can enter three distinct states during operation, see the
three-state PWM Input section under DESCRIPTION for further
details. Connect this pin to the PWM output of the controller.
GND (Pin 4), (Pin 4 QFN)
Bias and reference ground. All signals are referenced to this
node.
PGND (Pin 5 QFN Package Only)
This pin is the power ground return for the lower gate driver.
LGATE (Pin 5), (Pin 7 QFN)
Lower gate drive output. Connect to gate of the low-side
power N-Channel MOSFET.
VCC (Pin 6), (Pin 9 QFN)
Connect this pin to a +12V bias supply. Place a high quality
bypass capacitor from this pin to GND.
LVCC (Pin 10 QFN Package Only)
Lower gate driver supply voltage.
PVCC (Pin 7), (Pin 11 QFN)
For the HIP6601A and the HIP6604, this pin supplies the
upper gate drive bias. Connect this pin from +12V down to
+5V.
For the HIP6603A, this pin supplies both the upper and
lower gate drive bias. Connect this pin to either +12V or +5V.
PHASE (Pin 8), (Pin 14 QFN)
Connect this pin to the source of the upper MOSFET and the
drain of the lower MOSFET. The PHASE voltage is
monitored for adaptive shoot-through protection. This pin
also provides a return path for the upper gate drive.
Description
Operation
Designed for versatility and speed, the HIP6601A, HIP6603A
and HIP6604 dual MOSFET drivers control both high-side and
low-side N-Channel FETs from one externally provided PWM
signal.
The upper and lower gates are held low until the driver is
initialized. Once the VCC voltage surpasses the VCC Rising
Threshold (See Electrical Specifications), the PWM signal
takes control of gate transitions. A rising edge on PWM
initiates the turn-off of the lower MOSFET (see Timing
Diagram). After a short propagation delay [t
lower gate begins to fall. Typical fall times [t
PDLLGATE
FLGATE
provided in the Electrical Specifications section. Adaptive
shoot-through circuitry monitors the LGATE voltage and
determines the upper gate delay time [t
PDHUGATE
on how quickly the LGATE voltage drops below 2.2V. This
prevents both the lower and upper MOSFETs from
conducting simultaneously or shoot-through. Once this delay
period is complete the upper gate drive begins to rise
[t
RUGATE
] and the upper MOSFET turns on.
], the
] are
] based
Timing Diagram
PWM
UGATE
LGATE
t
PDLLGATE
t
PDHUGATE
t
FLGATE
5
t
RUGATE
t
PDLUGATE
t
FUGATE
t
PDHLGATE
t
RLGATE

HIP6601A, HIP6603A, HIP6604
A falling transition on PWM indicates the turn-off of the upper
MOSFET and the turn-on of the lower MOSFET. A short
propagation delay [t
PDLUGATE
upper gate begins to fall [t
] is encountered before the
FUGATE
]. Again, the adaptive
shoot-through circuitry determines the lower gate delay time,
t
PDHLGATE
. The PHASE voltage is monitored and the lower
gate is allowed to rise after PHASE drops below 0.5V. The
lower gate then rises [t
RLGATE
], turning on the lower
MOSFET.
Three-State PWM Input
A unique feature of the HIP660X drivers is the addition of a
shutdown window to the PWM input. If the PWM signal
enters and remains within the shutdown window for a set
holdoff time, the output drivers are disabled and both
MOSFET gates are pulled and held low. The shutdown state
is removed when the PWM signal moves outside the
shutdown window. Otherwise, the PWM rising and falling
thresholds outlined in the ELECTRICAL SPECIFICATIONS
determine when the lower and upper gates are enabled.
Adaptive Shoot-Through Protection
Both drivers incorporate adaptive shoot-through protection
to prevent upper and lower MOSFETs from conducting
simultaneously and shorting the input supply. This is
accomplished by ensuring the falling gate has turned off one
MOSFET before the other is allowed to rise.
During turn-off of the lower MOSFET, the LGATE voltage is
monitored until it reaches a 2.2V threshold, at which time the
UGATE is released to rise. Adaptive shoot-through circuitry
monitors the PHASE voltage during UGATE turn-off. Once
PHASE has dropped below a threshold of 0.5V, the LGATE
is allowed to rise. PHASE continues to be monitored during
the lower gate rise time. If PHASE has not dropped below
0.5V within 250ns, LGATE is taken high to keep the
bootstrap capacitor charged. If the PHASE voltage exceeds
the 0.5V threshold during this period and remains high for
longer than 2µs, the LGATE transitions low. Both upper and
lower gates are then held low until the next rising edge of the
PWM signal.
Power-On Reset (POR) Function
During initial startup, the VCC voltage rise is monitored and
gate drives are held low until a typical VCC rising threshold
of 9.95V is reached. Once the rising VCC threshold is
exceeded, the PWM input signal takes control of the gate
drives. If VCC drops below a typical VCC falling threshold of
9.2V during operation, then both gate drives are again held
low. This condition persists until the VCC voltage exceeds
the VCC rising threshold.
Internal Bootstrap Device
The HIP6601A, HIP6603A, and HIP6604 drivers all feature
an internal bootstrap device. Simply adding an external
capacitor across the BOOT and PHASE pins completes the
bootstrap circuit.
The bootstrap capacitor must have a maximum voltage
rating above VCC + 5V. The bootstrap capacitor can be
chosen from the following equation:
Q
GATE
BOOT
------------------------
≥
∆V
BOOT
is the amount of gate charge required to fully
GATE
BOOT
term is
C
Where Q
charge the gate of the upper MOSFET. The ∆V
defined as the allowable droop in the rail of the upper drive.
As an example, suppose a HUF76139 is chosen as the
upper MOSFET. The gate charge, Q
, from the data
GATE
sheet is 65nC for a 10V upper gate drive. We will assume a
200mV droop in drive voltage over the PWM cycle. We find
that a bootstrap capacitance of at least 0.325µF is required.
The next larger standard value capacitance is 0.33µF.
In applications which require down conversion from +12V or
higher and PVCC is connected to a +12V source, a boot
resistor in series with the boot capacitor is required. The
increased power density of these designs tend to lead to
increased ringing on the BOOT and PHASE nodes, due to
faster switching of larger currents across given circuit
parasitic elements. The addition of the boot resistor allows
for tuning of the circuit until the peak ringing on BOOT is
below 29V from BOOT to GND and 17V from BOOT to VCC.
A boot resistor value of 5
Ω typically meets this criteria.
In some applications, a well tuned boot resistor reduces the
ringing on the BOOT pin, but the PHASE to GND peak
ringing exceeds 17V. A gate resistor placed in the UGATE
trace between the controller and upper MOSGET gate is
recommended to reduce the ringing on the PHASE node by
slowing down the upper MOSFET turn-on. A gate resistor
value between 2
Ω to 10Ω typically reduces the PHASE to
GND peak ringing below 17V.
Gate Drive Voltage Versatility
The HIP6601A and HIP6603A provide the user total
flexibility in choosing the gate drive voltage. The HIP6601A
lower gate drive is fixed to VCC [+12V], but the upper drive
rail can range from 12V down to 5V depending on what
voltage is applied to PVCC. The HIP6603A ties the upper
and lower drive rails together. Simply applying a voltage
from 5V up to 12V on PVCC will set both driver rail voltages.
Power Dissipation
Package power dissipation is mainly a fu nct i on of th e
switching frequency and total gate charge of the selected
MOSFETs. Calculating the power dissipation in the driver for
a desired application is critical to ensuring safe operation.
Exceeding the maximum allowable power dissipation level
will push the IC beyond the maximum recommended
operating junction temperature of 125
allowable IC power dissipation for the SO8 package is
approximately 800mW. When designing the driver into an
application, it is recommended that the following calculation
o
C. The maximum
6

HIP6601A, HIP6603A, HIP6604
be performed to ensure safe operation at the desired
frequency for the selected MOSFETs. The power dissipated
by the driver is approximated as:
3
P1.05f
where f
and V
and Q
-- -
QUVLQ
2
is the switching frequency of the PWM signal. VU
sw
represent the upper and lower gate rail voltage. QU
L
is the upper and lower gate charge determined by
L
L
+
V
sw
U
+=
I
DDQ
V
CC
MOSFET selection and any external capacitance added to
the gate pins. The I
DDQ VCC
product is the quiescent power
of the driver and is typically 30mW.
The power dissipation approximation is a result of power
transferred to and from the upper and lower gates. But, the
internal bootstrap device also dissipates power on-chip
during the refresh cycle. Expressing this power in terms of
the upper MOSFET total gate charge is explained below.
The bootstrap device conducts when the lower MOSFET or
its body diode conducts and pulls the PHASE node toward
GND. While the bootstrap device conducts, a current path is
formed that refreshes the bootstrap capacitor. Since the
upper gate is driving a MOSFET, the charge removed from
the bootstrap capacitor is equivalent to the total gate charge
of the MOSFET. Therefore, the refresh power required by
the bootstrap capacitor is equivalent to the power used to
charge the gate capacitance of the MOSFET.
P
REFRESH
where Q
1
-- -
Q
==
f
SW
2
is the total charge removed from the bootstrap
LOSS
LOSS
V
PVCC
1
-- -
QUV
f
SW
2
U
capacitor and provided to the upper gate load.
Test Circuit
+5V OR +12V
+12V
0.15µF
0.15µF
1000
800
600
400
POWER (mW)
200
0 500 1000 1500 2000
FIGURE 1. POWER DISSIPATION vs FREQUENCY
+5V OR +12V
PVCC
VCC
PWM
CU = CL = 3nF
0.01µF
BOOT
UGATE
HIP660X
PHASE
LGATE
GND
CU = CL = 4nF
= CL = 5nF
C
U
FREQUENCY (kHz)
2N7002
C
L
VCC = PVCC = 12V
2N7002
100kΩ
CU = CL = 2nF
CU = CL = 1nF
C
U
The 1.05 factor is a correction factor derived from the
following characterization. The base circuit for characterizing
the drivers for different loading profiles and frequencies is
provided. C
and CL are the upper and lower gate load
U
capacitors. Decoupling capacitors [0.15µF] are added to the
PVCC and VCC pins. The bootstrap capacitor value is
0.01µF.
In Figure 1, CU and CL values are the same and frequency
is varied from 50kHz to 2MHz. PVCC and VCC are tied
together to a +12V supply. Curves do exceed the 800mW
cutoff, but continuous operation above this point is not
recommended.
Figure 2 shows the dissipation in the driver with 3nF loading
on both gates and each individually. Note the higher upper
gate power dissipation which is due to the bootstrap device
refresh cycle. Again PVCC and VCC are tied together and to
a +12V supply.
1000
VCC = PVCC = 12V
800
CU = CL = 3nF
600
400
POWER (mW)
200
0 500 1000 1500 2000
FREQUENCY (kHz)
CU = 3nF
C
CU = 0nF
C
= 3nF
L
= 0nF
L
FIGURE 2. 3nF LOADING PROFILE
The impact of loading on power dissipation is shown in
Figure 3. Frequency is held constant while the gate
capacitors are varied from 1nF to 5nF. VCC and PVCC are
tied together and to a +12V supply. Figures 4 through 6
show the same characterization for the HIP6603A with a
+5V supply on PVCC and VCC tied to a +12V supply.
7

HIP6601A, HIP6603A, HIP6604
Since both upper and lower gate capacitance can vary, Figure 8 shows dissipation curves versus lower gate capacitance with
upper gate capacitance held constant at three different values. Th ese curves apply only to the HIP6601A due to power supply
configuration.
Typical Performance Curves
1000
VCC = PVCC = 12V
FREQUENCY
800
600
400
POWER (mW)
200
0
1.0 2.0 3.0 4.0 5.0
= 1MHz
FREQUENCY = 500kHz
FREQUENCY = 200kHz
GATE CAPACITANCE (C
= CL) (nF)
U
FIGURE 3. POWER DISSIPATION vs LOADING FIGURE 4. POWER DISSIPATION vs FREQUENCY (HIP6603A)
400
VCC = 12V, PVCC = 5V
300
CU = CL = 5nF
CU = CL = 4nF
200
CU = CL = 3nF
POWER (mW)
100
0
0 500 1000 1500 2000
FREQUENCY (kHz)
CU = CL = 2nF
CU = CL = 1nF
400
VCC = 12V, PVCC = 5V
300
CU = CL = 3nF
200
CU = 3nF
C
= 0nF
POWER (mW)
100
0
L
CU = 0nF
= 3nF
C
L
0 500 1000 1500 2000
FREQUENCY (kHz)
400
VCC = 12V,
300
200
POWER (mW)
100
0
1.0 2.0 3.0 4.0 5.0
FREQUENCY = 1MHz
FREQUENCY = 500kHz
FREQUENCY = 500kHz
FREQUENCY = 200kHz
GATE CAPACITANCE = (C
= CL) (nF)
U
FIGURE 5. 3nF LOADING PROFILE (HIP6603A) FIGURE 6. VARIABLE LOADING PROFILE (HIP6603A)
1000
VCC = 12V, PVCC = 5V
800
FREQUENCY = 1MHz
600
400
POWER (mW)
200
0
1.0 2.0 3.0 4.0 5.0
GATE CAPACITANCE (C
FREQUENCY = 500kHz
FREQUENCY = 200kHz
= CL) (nF)
U
500
VCC = 12V, PVCC = 5V
= 5nF
FREQUENCY = 500kHz
400
300
200
POWER (mW)
100
1.02.03.04.05.0
LOWER GATE CAPACITANCE (CL) (nF)
C
= 1nF
U
C
C
U
= 3nF
U
PVCC = 5V
FIGURE 7. POWER DISSIPATION vs FREQUENCY (HIP6601A)
8
FIGURE 8. POWER DISSIPATION vs LOWER GATE
CAPACITANCE FOR FIXED VALUES OF UPPER
GATE CAPACITANCE

HIP6601A, HIP6603A, HIP6604
Small Outline Exposed Pad Plastic Packages (EPSOIC)
N
INDEX
AREA
123
TOP VIEW
-AD
e
B
0.25(0.010) C AM BS
SIDE VIEW
123
N
P
BOTTOM VIEW
H
E
-B-
SEATING PLANE
A
-C-
A1
M
P1
0.25(0.010) BM M
L
h x 45
α
µ
0.10(0.004)
M8.15B
8 LEAD NARROW BODY SMALL OUTLINE EXPOSED PAD
PLASTIC PACKAGE
INCHES MILLIMETERS
SYMBOL
A 0.056 0.066 1.43 1.68 -
A1 0.001 0.005 0.03 0.13 -
B 0.0138 0.0192 0.35 0.49 9
C 0.0075 0.0098 0.19 0.25 D 0.189 0.196 4.80 4.98 3
E 0.150 0.157 3.31 3.39 4
o
e 0.050 BSC 1.27 BSC -
H 0.230 0.244 5.84 6.20 -
h 0.010 0.016 0.25 0.41 5
L 0.016 0.035 0.41 0.64 6
C
N8 87
o
α
0
o
8
o
0
P - 0.090 - 2.286 11
P1 - 0.090 - 2.286 11
NOTES:
1. Symbols are defined in the “MO Series Symbol List” in
Section 2.2 of Publication Number 95.
2. Dimensioning and tolerancing per ANSI Y14.5M-1982.
3. Dimension “D” does not include mold flash, protrusions or
gate burrs. Mold flash, protrusion and gate burrs shall not
exceed 0.15mm (0.006 inch) per side.
4. Dimension “E” does not include interlead flash or protrusions.
Interlead flash and protrusions shall not exceed 0.25mm
(0.010 inch) per side.
5. The chamfer on the body is optional. If it is not present, a
visual index feature must be located within the crosshatched
area.
6. “L” is the length of terminal for solder ing to a substrate.
7. “N” is the number of terminal positions.
8. Terminal numbers are shown for reference only.
9. The lead width “B”, as measured 0.36mm (0.014 inch) or
greater above the seating plane, shall not exceed a
maximum value of 0.61mm (0.024 inch).
10. Controlling dimension: MILLIMETER. Converted inch
dimensions are not necessarily exact.
11. Dimensions “P” and “P1” are thermal and/or electrical
enhanced variations. Values shown are maximum size of
exposed pad within lead count and body size.
o
8
NOTESMIN MAX MIN MAX
-
Rev. 0 6/00
9

HIP6601A, HIP6603A, HIP6604
Quad Flat No-Lead Plastic Package (QFN)
Micro Lead Frame Plastic Package (MLFP)
L16.4x4
16 LEAD QUAD FLAT NO-LEAD PLASTIC PACKAGE
(COMPLIANT TO JEDEC MO-220-VGGC ISSUE C)
MILLIMETERS
SYMBOL
A 0.80 0.90 1.00 A1 - - 0.05 A2 - - 1.00 9
A3 0.20 REF 9
b 0.23 0.28 0.38 5, 8
D 4.00 BSC D1 3.75 BSC 9
D2 1.95 2.10 2.25 7, 8
E 4.00 BSC E1 3.75 BSC 9
E2 1.95 2.10 2.25 7, 8
e 0.65 BSC -
k0.25 - - -
L 0.35 0.60 0.75 8
L1 - - 0.15 10
N162
Nd 4 3
Ne 4 3
P- -0.609
θ --129
NOTES:
1. Dimensioning and tolerancing conform to ASME Y14.5-1994.
2. N is the number of terminals.
3. Nd and Ne refer to the number of terminals on each D and E.
4. All dimensions are in millimeters. Angles are in degrees.
5. Dimension b applies to the metallized terminal and is measured
between 0.15mm and 0.30mm from the terminal tip.
6. The configuration of the pin #1 identifier is optional, but must be
located within the zone indicated. The pin #1 identifier may be
either a mold or mark feature.
7. Dimensions D2 and E2 are for the exposed pads which provide
improved electrical and thermal performance.
8. Nominal dimensions are provided to assist with PCB Land Pattern
Design efforts, see Intersil Technical Brief TB389.
9. Features and dimensions A2, A3, D1, E1, P & θ are present when
Anvil singulation method is used and not present for saw
singulation.
10. Depending on the method of lead termination at the edge of the
package, a maximum 0.15mm pull back (L1) maybe present. L
minus L1 to be equal to or greater than 0.3mm.
NOTESMIN NOMINAL MAX
Rev. 4 10/02
10

HIP6601A, HIP6603A, HIP6604
Small Outline Plastic Packages (SOIC)
N
INDEX
AREA
123
SEATING PLANE
-AD
e
B
0.25(0.010) C AM BS
M
E
-B-
A
-C-
0.25(0.010) BM M
H
α
µ
A1
0.10(0.004)
L
h x 45
o
C
NOTES:
1. Symbols are defined in the “MO Series Symbol List” in Section 2.2 of
Publication Number 95.
2. Dimensioning and tolerancing per ANSI Y14.5M-1982.
3. Dimension “D” does not include mold flash, protrusions or gate burrs.
Mold flash, protrusion and gate burrs shall not exceed 0.15mm (0.006
inch) per side.
4. Dimension “E” does not include interlead flash or protrusions. Interlead flash and protrusions shall not exceed 0.25mm (0.010 inch) per
side.
5. The chamfer on the body is optional. If it is not present, a visual index
feature must be located within the crosshatched area.
6. “L” is the length of terminal for soldering to a substrate.
7. “N” is the number of terminal positions.
8. Terminal numbers are shown for reference only.
9. The lead width “B”, as measured 0.36mm (0.014 inch) or greater
above the seating plane, shall not exceed a maximum value of
0.61mm (0.024 inch).
10. Controlling dimension: MILLIMETER. Converted inch dimensions
are not necessarily exact.
M8.15 (JEDEC MS-012-AA ISSUE C)
8 LEAD NARROW BODY SMALL OUTLINE PLASTIC
PACKAGE
INCHES MILLIMETERS
SYMBOL
A 0.0532 0.0688 1.35 1.75 -
A1 0.0040 0.0098 0.10 0.25 -
B 0.013 0.020 0.33 0.51 9
C 0.0075 0.0098 0.19 0.25 D 0.1890 0.1968 4.80 5.00 3
E 0.1497 0.1574 3.80 4.00 4
e 0.050 BSC 1.27 BSC -
H 0.2284 0.2440 5.80 6.20 -
h 0.0099 0.0196 0.25 0.50 5
L 0.016 0.050 0.40 1.27 6
N8 87
o
α
0
o
8
o
0
o
8
Rev. 0 12/93
NOTESMIN MAX MIN MAX
-
All Intersil products are manufactured, assembled and tested utilizing ISO9000 quality systems.
Intersil Corporation’s quality certifications can be viewed at website www.intersil.com/design/quality
Intersil products are sold by description only. Intersil Corporation reserves the right to make changes in circuit design and/or specifications at any time without notice.
Accordingly, the reader is cautioned to verif y that data she ets are curren t before placin g orders. In formation fu rnished by Int ersil is believed t o be accurate and reli able. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may result from its use.
No license is granted by implication or otherw ise un de r any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its prod ucts, see web site www.intersil.com
11
 Loading...
Loading...