

CDP68HC68A2
July 1998
Features
• 10-Bit Resolution
• 8-Bit Mode for Single Data Byte Transfers
• SPI (Serial Peripheral Interface) Compatible
• Operates Ratiometrically Referencing V
External Source
•14µs 10-Bit Conversion Time
• 8 Multiplexed Analog Input Channels
• Independent Channel Select
• Three Modes of Operation
• On Chip Oscillator
• Low Power CMOS Circuitry
• Intrinsic Sample and Hold
• 16 Lead Dual-In-Line Plastic Package
• 20 Lead Dual-In-Line Small Outline Plastic Package
• Evaluation Board available - CDP68HC05C16BEVAL
DD
or an
Ordering Information
TEMP.RANGE
PART NUMBER
CDP68HC68A2E -40 to 85 16 Ld PDIP E16.3
CDP68HC68A2M -40 to 85 20 Ld SOIC M20.3
(oC) PACKAGE
PKG.
NO.
CMOS Serial 10-Bit A/D Converter
Description
The CDP68HC68A2 is a CMOS 8-bit or 10-bit successive
approximation analog to digital converter (A/D) with a
standard Serial Peripheral Interface (SPI) bus and eight multiplexed analog inputs. Voltage referencing is user selectable
to be relative to either V
analog inputs can range between V
The CDP68HC68A2 employs a switched capacitor,
successive approximation A/D conversion technique which
provides an inherent sample-and-hold function. An onchip
Schmitt oscillator provides the internal timing for the A/D
converter. The Schmitt input can be externally clocked or
connected to a single, external capacitor to form an RC
oscillator with a period of approximately 10-30ns per
picofarad.
Conversion times are proportional to the oscillator period. At
the maximum specified frequency of 1MHz, 10-bit
conversions take 14µs per channel. At the same frequency,
8-bit conversions consume 12µs per channel.
The versatile modes of the CDP68HC68A2 allow any
combination of the eight input channels to be enabled and
any one of the selected channels to be specified as the
“starting” channel. Conversions proceed sequentially
beginning with the starting channel. Nonselected channels
are skipped. Modes can be selected to: sequence from
channel to channel on command; sequence through
channels automatically, converting each channel one time;
or sequence repeatedly through all channels.
The results of 10-bit conversions are stored in 8-bit register
pairs (one pair per channel). The two most significant bits
are stored in the first register of each pair and the eight least
significant bits are stored in the second register of the pair.
To allow faster access, in the 8-bit mode, the results of
conversions are stored in a single register per channel.
or analog channel 0 (AI0). The
DD
and VDD.
SS
A read-only STATUS register facilitates monitoring the
status of conversions. The STATUS register can simply be
polled or the
communications.
CAUTION: These devices are sensitive to electrostatic discharge; follow proper IC Handling Procedures.
http://www.intersil.com or 407-727-9207
| Copyright © Intersil Corporation 1999
1
INT pin can be enabled for interrupt dr iven
File Number 1963.3
Pinouts
CDP68HC58A2E
(PDIP)
TOP VIEW
CDP68HC68A2
CDP68HC68A2M
(SOIC)
TOP VIEW
OSC
INT
MISO
MOSI
SCK
CE
AI0 / EXT. REF
V
SS
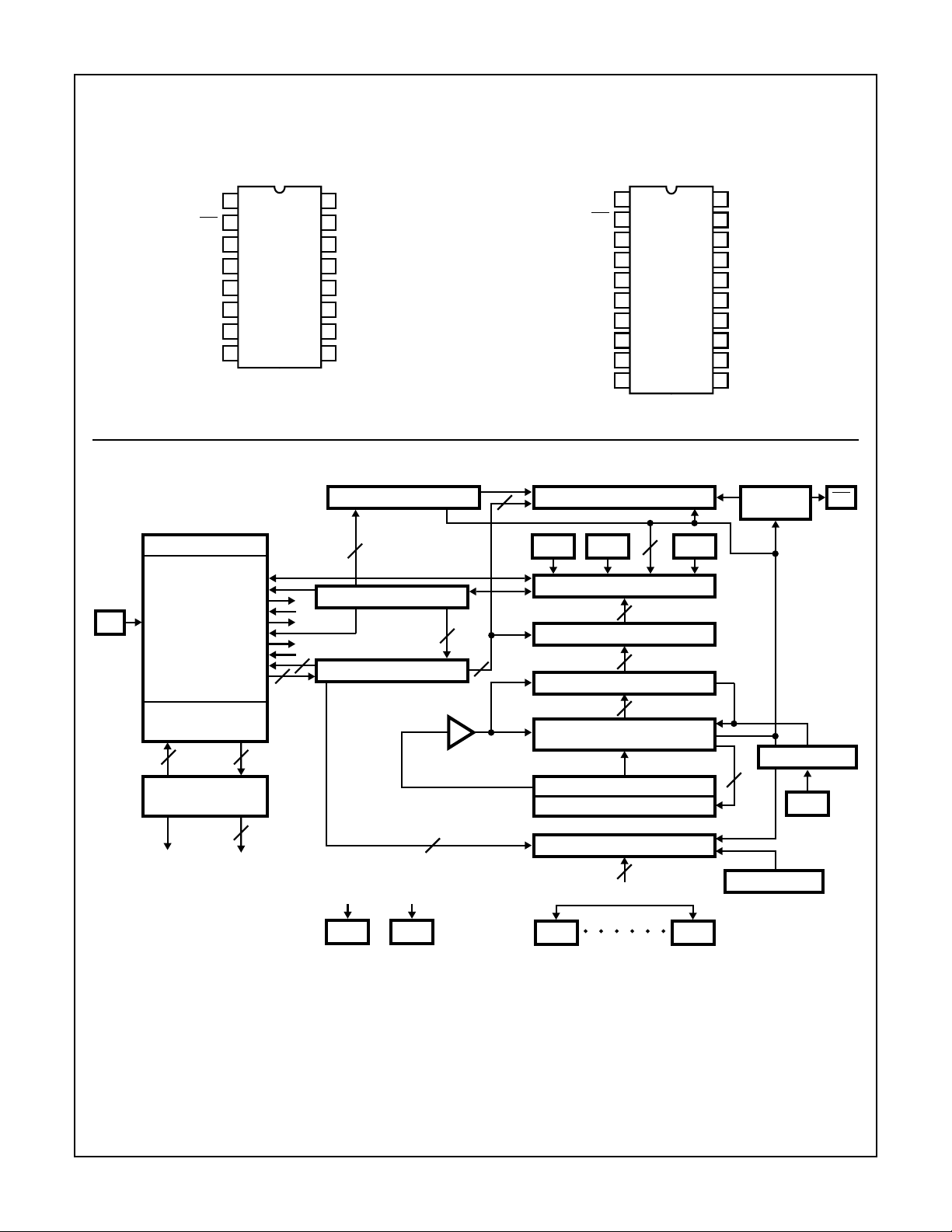
Block Diagram
SPI CONTROL LOGIC
CE
CONTROL LOGIC
ADDRESS CONTROL
LOGIC
ADDRESS REGISTER
1
16
1
2
3
4
5
6
7
8
4
66
V
DD
15
AI1
14
AI2
13
AI3
12
AI4
AI5
11
10
AI6
9
AI7
ACC LATCH COMPARATOR
8
CONTROL REGISTER
4
CAR
CHOPPER
STABILIZED
COMPARATOR
AI0 / EXT. REF
3
4
4
OSC
INT
2
MISO
3
MOSI
4
NC
5
NC
6
SCK
7
8
CE
9
V
10
SS
STATUS REGISTER
MOSI MISO
DATA REGISTERS (READ ONLY)
SUCCESSIVE APPROXIMATION
SCK
SHIFT REGISTER
A/D CONVERTER LATCH
CONTROL LOGIC
10-BIT CAPACITOR ARRAY
CAPACITOR SWITCH ARRAY
8
8
8
10
V
20
AI1
19
AI2
18
AI3
17
NC
16
NC
15
AI4
14
AI5
13
12
AI6
AI7
11
DD
INTERRUPT
LOGIC
OSCILLATOR
12
INT
OSC
3
STATUS
REGISTERS
CONTROL
REGISTERS
†USED AS VOLTAGE INPUT IN
EXTERNAL REFERENCE MODE.
3
V
SS
V
DD
ANALOG MULTIPLEXER
8
ANALOG INPUTS
AI0
REFERENCE
AI7
2
CDP68HC68A2
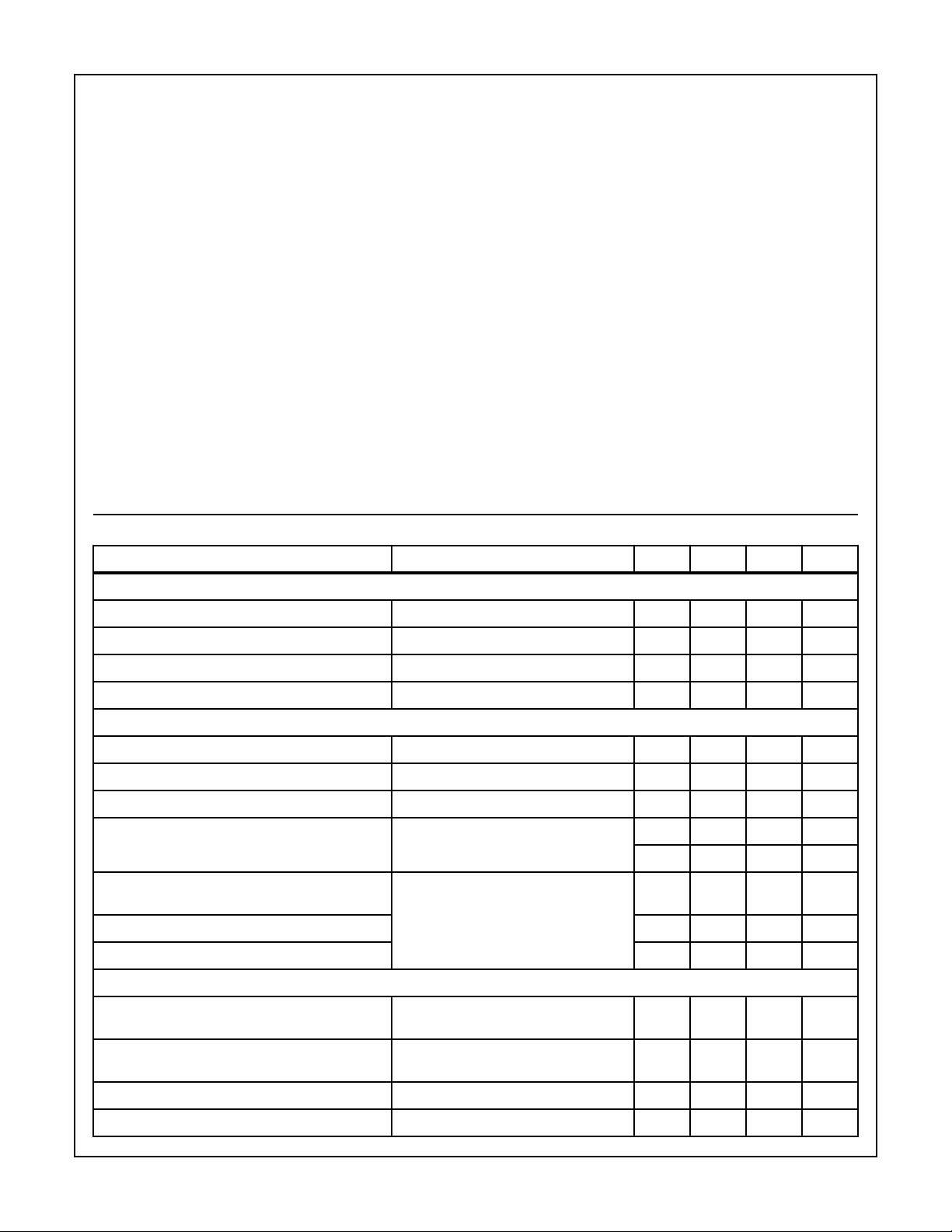
Absolute Maximum Ratings Thermal Information
DC Supply Voltage Range, (VDD) . . . . . . . . . . . . . . . . -0.5V to +7V
(Voltage Referenced to VSS Terminal)
Input Voltage Range, All Inputs . . . . . . . . . . . . . -0.5V to VDD +0.5V
DC Input Current, Any One Input. . . . . . . . . . . . . . . . . . . . . . . . .±10mA
Operating Conditions (Note 1)
Temperature Ambient, TA. . . . . . . . . . . . . . . . . . . . . . -40oC to 85oC
DC Voltage Range . . . . . . . . . . . . . . . . . . . . . . . . . .3V Min, 6V Max
CAUTION: Stresses above those listed in “Absolute Maximum Ratings” may cause permanent damage to the device. This is a stress only rating and operation
of the device at these or any other conditions above those indicated in the operational sections of this specification is not implied.
NOTE:
1. For maximum reliability, nominal operating conditions should be selected so that operation is always within the ranges specified.
2. θJA is measured with the component mounted on an evaluation PC board in free air.
3. Printed circuit board mount: 58mm x 57mm minimum area x 1.6mm thick G10 epoxy glass, or equivalent.
Thermal Resistance (Typical, Note 2) θJA (oC/W)
PDIP Package. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
SOIC Package. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Maximum Power Dissipation Per Package (PD)
TA = -40oC to 60oC (Package Type E). . . . . . . . . . . . . . . . 500mW
TA = 60oC to 85oC (Package Type E)
Derate Linearly at . . . . . . . . . . . . . . . . . . .12mW/oC to 200mW
TA = -40oC to 70oC (Package Type M) (Note 3) . . . . . . . . 400mW
TA = -70oC to 85oC (Package Type M) (Note 3)
Derate Linearly at . . . . . . . . . . . . . . . . . . 6.0mW/oC to 310mW
Device Dissipation Per Output Transistor . . . . . . . . . . . . . . . . 40mW
TA = Full Package Temperate Range (All Package Types)
Maximum Junction Temperature. . . . . . . . . . . . . . . . . . . . . . . . 150oC
Maximum Storage Temperature Range (T
Maximum Lead Temperature (During Soldering) . . . . . . . . . . 265oC
At Distance 1/16 ±1/32 In. (1.59 ± 0.79mm)
From Case for 10s Max (SOIC - Lead Tips Only)
) . . . . . -65oC to 150oC
STG
Electrical Specification T
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
ACCURACY
Differential Linearity Error 10-Bit Mode - ±1.25 ±2 LSB
Integral Linear Error 10-Bit Mode - ±1.25 ±2 LSB
Offset Error 10-Bit Mode -1 3 4 LSB
Gain Error 10-Bit Mode -1 1 2 LSB
ANALOG INPUTS: AI0 THRU AI7
Input Resistance In Series with Sample Caps - 85 - Ω
Sample Capacitance During Sample State - 400 - pF
Input Capacitance During Hold State - 20 - pF
Input Current At VIN = V
Input + Full Scale Range From Input RC Time Constant
Input Bandwidth (3dB) - 4.68 - MHz
Input Voltage Range: AI0 3.0 - V
DIGITAL INPUTS: MOSI, SCK, CE, TA = -40oC to 85oC
= 25oC, VDD = 5V, Unless Otherwise Specified.
A
+ During Sample
During Hold or Standby State
VR = 1
REF
- +30 - µA
--±1 µA
V
SS
-V
DD
+0.3
DD
V
V
High Input Voltage V
Low Input Voltage V
Input Leakage --±1 µA
Input Capacitance TA = 25oC--10pF
IH
IL
VDD = 3 to 6V 70 - - % of
V
DD
VDD = 3 to 6V - - 30 % of
V
DD
3
CDP68HC68A2
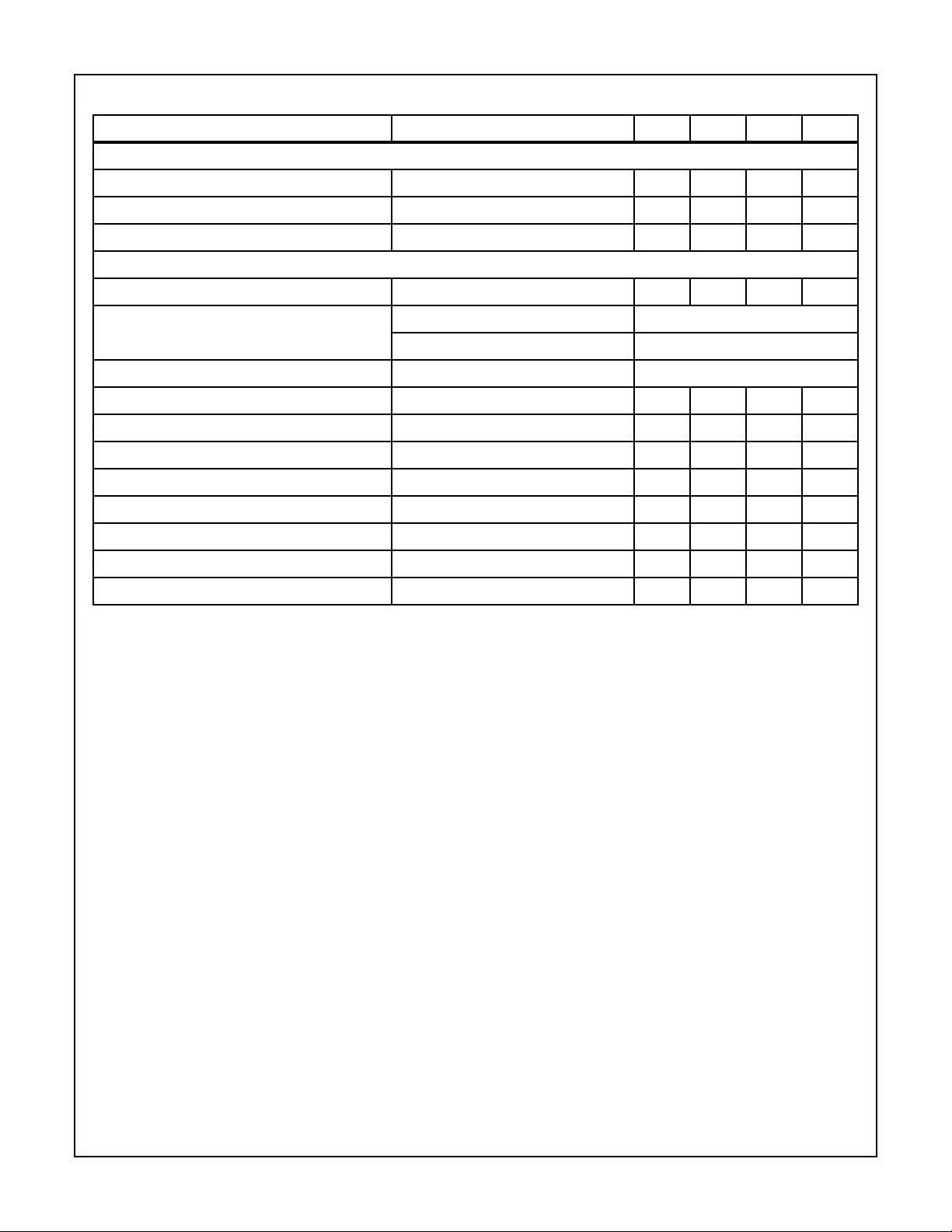
Electrical Specification T
= 25oC, VDD = 5V, Unless Otherwise Specified. (Continued)
A
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
DIGITAL OUTPUTS: MISO, INT, TA = -40oC to 85oC
High Level Output VOH, MISO I
Low Level Output VOL, MISO, INT I
Three-State Output Leakage I
, MISO, INT - - ±10 µA
OUT
SOURCE
SINK
6mA 4.25 - - V
= 6mA - - 0.4 V
TIMING PARAMETERS TA = -40oC to 85oC
Oscillator Frequency f
Conversion Time
(Including Sample Time)
SAMPLE
10-Bit Mode - - -1 MHz
10-Bit Mode 14 Oscillator Cycles
8-Bit Mode 12 Oscillator Cycles
Sample Time (Pre-Encode) 8 Time Constants (8τ) Required First 1.5 Oscillator ≥ 8τ
Serial Clock (SCK) Frequency - - 1.5 MHz
SCK Pulse Width T
MOSI Setup Time T
MOSI Hold Time T
P
DSU
DH
Either SCKA or SCK
B
Prior to Leading Edge of T
After Leading Edge of T
P
150 - - ns
P
60 - - ns
60 - - ns
MISO Rise and Fall Time 200pF Load - - 100 ns
MISO Propagation Delay T
I
DD
I
DD
DOD
From Trailing SCK Edge - - 100 ns
VDD = 5V, Continuous Operation - 1.4 2 mA
VDD = 3V, Continuous Operation - 0.7 1.2 mA
4
CDP68HC68A2
Through this specification the CDP68HC68A2 is referred to
simply as the A2.
Functional Pin Description
OSC - Oscillator (Input/Output)
This pin is user programmable. In the “external” mode, the
clock input for the successive approximation logic is applied
to OSC from an external clock source. The input is a Schmitt
trigger input which provides excellent noise immunity. In the
“internal” mode, a capacitor is connected between this pin
and a power supply to form a “one pin oscillator”. The
frequency of the oscillator is inversely dependent on the
capacitor value. Differences in period, from one device to
another, should be anticipated. Systems utilizing the internal
oscillator must be tolerant of uncertainties in conversion
times or provide trimming capability on the OSC capacitor.
See Table 2 for typical frequencies versus capacitance.
INT - Interrupt (Open Drain Output)
INT is used to signal the completion of an A/D conversion.
This output is generally connected, in parallel with a pullup
resistor, to the interrupt input of the controlling microprocessor. The open drain feature allows wire-NOR’ing with other
interrupt inputs. The inactive state of
When active,
state of
Select and Status Registers.
MISO - Master-In-Slave-Out (Output)
Serial data is shifted out on this pin. Data is provided most
significant bit first.
MOSI - Master-Out-Slave-In (Input)
Serial data is shifted in on this pin. Data must be supplied
most significant bit first. This is a CMOS input and must be
held high or low at all times to minimize device current.
SCK - Serial Clock (Input)
Serial data is shifted out on MISO, synchronously, with each
leading edge of SCK. Input data from the MOSI pin is
latched, synchronously, with each trailing edge of SCK.
CE - Chip Enable (Input)
An active HIGH device enable. CE is used to synchronize
communications on the SPI lines (MOSI, MISO, and SCK).
When CE is held in a low state, the SPI logic is placed in a
reset mode with MISO held in a high impedance state.
Following a transition from low to high on CE, the
CDP68HC68A2 interprets the first byte transferred on the
SPI lines as an address. If CE is maintained high,
subsequent transfers are interpreted as data reads or writes.
AIO/
EXT REF - Analog Input 0/External Reference (Input)
This input is one of eight analog input channels. Its function
is selectable through the Mode Select Register (MSR). If VR
is set high in the MSR, AI0/
voltage reference against which all other inputs are
INT is driven to a low level output voltage. The
INT is controlled and monitored by bits in the Mode
EXT REF provides an external
INT is high impedance.
measured. AI0/EXT REF must fall within the VSSand V
supply rails. If VR is set low in the MSR, VDDis used as the
reference voltage and AI0/
analog input (see AI1-AI7).
AI1-AI7 - Analog Inputs 1-7 (Inputs)
Together with AI0/
analog inputs (channels) which are multiplexed within the
CDP68HC68A2 to a single, high-speed, successive approximation, A/D converter. AI1-AI7 must fall within the V
V
supply rails.
DD
V
- Negative Power Supply
SS
This pin provides the negative analog reference and the
negative power supply for the CDP68HC68A2.
V
- Positive Power Supply
DD
This pin provides the positive power supply and, depending
on the value of the VR bit in the MSR, the positive analog
reference for the CDP68HC68A2.
EXT REF, these pins provide the eight
EXT REF is treated as any other
SS
DD
and
Overview
From the programmer’s perspective, the A2 is comprised of
three control registers (Mode Select Register - MSR,
Channel Select Register - CSR, and Starting Address
Register - SAR), a status register (SR), an array of eight
pairs of Data Registers, and one non-addressable, internal
register (Channel Address Register). See Figure 1.
The A2 contains a high speed, 10-bit, successive
approximation, analog to digital converter (A/D). The input to
the A/D can be any one of the A2’s eight analog inputs (AI0
through AI7). The contents of the CAR determine which analog input is connected to the A/D. The result of each analog
to digital conversion is written to the Data Register array. The
Data Register array is also addressed by the contents of the
CAR, providing a one to one correspondence between each
analog input and each Data Register pair.
The contents of the CAR are also used during Data Register
reads to address the Data Register array. The CAR is
automatically jammed with the correct address when an
Address/Control Byte is sent to the A2. A second means, to
initialize the CAR, is by writing to the SAR.
Normal procedure for programming the A2 is to first select
the desired hardware mode by writing to the MSR. The
“active” analog channels are then specified by writing to the
CSR (channels not selected in the CSR are skipped during
conversions and burst mode reads). Finally, a write to the
SAR initializes the CAR (designating the first channel to
convert) and initiates the A/D conversions.
Polling of the SR or hardware interrupts can be used to
determine the completion of conversions.
The converted data is read from the data registers. In eight
bit mode, a single register is read for each channel of interest. In ten bit mode, two registers are read per channel.
5

CDP68HC68A2
CE
SCK
SCK
MOSI
$00
$01
$0E
$0F
$10
$11
$12
$13
HIGH DATA REGISTER 0
LOW DATA REGISTER 0
HIGH DATA REGISTER 7
LOW DATA REGISTER 7
DATA REGISTERS
MODE SELECT REGISTER
CHANNEL SELECT REGISTER
START ADDRESS REGISTER
STATUS REGISTER
CONTROL/STATUS REGISTERS
8
A
TO
D
CHANNEL ADDRESS REGISTER
TO
INOUT
1
M
U
X
AI0
AI1
AI2
AI3
AI4
AI5
AI6
AI7
FIGURE 1. A PROGRAMMER’S MODEL OF THE CDP68HC68A2
T
P
a
b
D7 D6 D5 D4 D3 D2 D1 D0
MISO
(READ
ONLY)
T
dsu
T
dh
T
dod
FIGURE 2. TIMING DIAGRAM FOR SERIAL PERIPHERAL INTERFACE
Serial Communications
Hardware Interface
All communications between the A2 and the controlling
processor are carried out over the Serial Peripheral Interface
(SPI) bus lines (MOSI, MISO, SCK, and CE). The SPI bus is
directly compatible with the SPI facilities of Intersil’
CDP68HC05 microcontrollers. Data is transmitted over the
MISO and MOSI lines synchronous with SCK. Transfers are
done most significant bit first.
The A2 acts as a “slave” device. The controlling “master” signals the A2 that a SPI transfer is to take place by raising CE
and clocking SCK. A single shift register is used for transferring data in and out of the A2. Whenever CE and SCK are
activated, data is shifted from the master to the A2 over the
Master-Out-Slave-In (MOSI) line and, simultaneously, during
read operations, data is shifted to the master from the A2
over the Master-In-Slave-Out (MISO) line. Note that SCK
must be provided by the master for both reads and writes.
To accommodate various hardware systems, the A2 can
shift data on either the rising or falling edge of SCK. The
“active” edge is automatically determined by the A2. At the
moment that CE is first brought to a high level, the state of
SCK is latched. This latched state determines the interpretation of SCK. If SCK is low when CE is activated, data is
shifted out on MISO on each rising edge of SCK and data is
latched from MOSI on each falling edge of SCK (see SCK
in Figure 2). If SCK is high when CE is activated, data is
shifted out on MISO on each falling edge of SCK and data is
latched from MOSI on each rising edge of SCK (see SCK
b
Figure 2).
Hardware Interfacing to CDP68HC05 Controllers
When interfacing the A2 to CDP68HC05 controllers, set
CPHA = 1 and CPOL = (0 or 1) in the SPI control register.
Note that SCK pulses are generated only when data is written
to theSPI Data Register in a CDP68HC05. Reading data from
or writing data to the A2 requires writing data to the SPI Data
Register. The data will be ignored by the A2 for read operations. The read data is av ailable to the CDP68HC05 in the SPI
Data Register when SPIF is true in the SPI Status Register.
Hardware Interfacing to Non-CDP68HC05 Controllers
Most popular microcontrollers have a synchronous communications facility which can be adapted to work with the A2.
Those that don’t can be easily interfaced using port lines to
synthesize a SPI bus.
a
in
6

CDP68HC68A2
Software Interface
Reading and writing to the A2 can be performed in either
single byte or multiple byte (burst) modes. Both modes begin
the same way: a positive transition is applied to CE (if CE is
high, it must first be brought low, then returned high); an
address/control byteis transferred (requires 8 clocks on SCK
and 8 bits of data on MOSI); and the first byte of data is
transferred (requires 8 clocks of SCK). In the case of single
byte mode, the transfer is complete. For multiple byte
transfers, each series of 8 pulses on SCK produces another
8-bit transfer (see Figure 3).
CE
MOSI
MISO
TRANSFER CYCLE:
PHASE:
FIGURE 3A. SINGLE BYTE TRANSFER
CE
MOSI
MISO
ADDRESS: WRITE ADDR: 1 ADDR: 1 ADDR: 2 ADDR: N
TRANSFER CYCLE:
PHASE:
FIGURE 3B. MULTIPLE(N) BYTETRANSFER
ADDRESS BYTE DATA BYTE
READ
12
III
(REQUIRES 2 SPI TRANSFERS)
ADDRESS
BYTE BYTE
HI - Z HI - Z
(EFFICIENT DEVICE COMMUNICATION REQUIRING N+1 SPI TRANSFERS)
DAT A
12
III
DAT A DATA
READ
DAT A
READ
3 N+1
HI - ZHI - Z
READ
II
The format of the address/control byte is shown in Figure 4.
The most significant bit is the
operations are to be performed. If
R/W bit. When R/W is 0, read
R/W is 1, write operations
are to be performed. A0 through A4 specify the register to
access. Data registers are mapped to address $00 through
$0F. The Control and Status Registers are at locations $10
through $13 (See Figure 1).
When transferring multiple bytes of data, the type of transfer
- read or write - is fixed by bit seven of the initial address/
control byte. After the initial data transfer, the address will
automatically be adjusted for each subsequent transfer.
When reading Data Registers in the 8-bit mode, each read
will advance the address by two, to the next (as specified in
the CSR) active channel’s Low Data Register. In the 10-bit
mode, following a read of a High Data Register, the address
is advanced to the Low Data Register of the same channel.
Reading the Low Data Register then increments the read
address to the next (as specified in the CSR) active channel’sHigh Data Register. Following a read of the last (closest
to 7) active channel’s Data Register(s), the address recycles
to the first (closest to 0) active channel’s Data Register(s).
When reading or writing control registers, the address will
increment to the next register after each transfer. Once
address $13 has been reached no more increments are
performed. This facilitates polling of the Status Register (SR)
which is located at address $13. If the A2 remains selected
following a read of SR, each successive 8 bit transfer will read
the SR again without; the need for an address /control byte.
Programming the CDP68HC68A2
Registers
Initializing the A2
The A2 is equipped with a power on reset circuit which
clears the MSR to all 0’s. This ensures that
impedance state and conversions are inhibited. The contents of all other registers are unknown until explicitly initialized. No other provisions are made for resetting the A2.
Systems which can be reset after power up must reset the
A2 by explicitly writing 0’s to the MSR. Designs which utilize
the
INT line must be certain that the MSR is cleared, or the
A2 is initialized to a known state, before enabling interrupts.
NOTE: It is good practice to include code which initializes the A2, to
a known state,at theearliest practicalpoint. In systems which utilize
INT, if a system reset occurs after power-up, A2 initialization code
must be executed before processor interrupts are enabled.
Address/Control Byte
The Address/Control Byte is a dual purpose word which
performs register addressing and read/write control. The
Address/Control Byte is the first byte transferred to the A2
following activation of CE. If CE is active, it must first be
brought low, then reactivated prior to transferring an
Address/Control Byte.
R/W- - A4A3A2A1A0
76543210
FIGURE 4. ADDRESS/CONTROL BYTE
The most significant bit (MSB) of the Address/Control byte is
R/W. This bit is used to control the flow of data during the
subsequent SPI data transfers. If
place. If
R/W is a 1, writes take place. During read transfers,
R/W is a 0, reads take
data is shifted out on MISO. During writes, data is shifted in
on MOSI and MISO is held in a high impedance state.
The least significant five bits (A0 through A4) provide the
read address. Bits 5 and 6 are not required and can be sent
as either 0 or 1 (0’s are assembled throughout this
specification). When addressing Data Registers in 8-bit
mode, A0 is internally forced to a 1. Attempting to read a
High Data Register in 8-bit mode will result in a read of the
Low Data Register of the next active channel).
NOTE: CAUTION! When addressing Data Registers,the user must
ensure that the contentsof theCAR match the addressportion of the
Address/Control Byte. Failure to do so may result in corrupted data.
This condition is generally met in Modes 1 and 2. When running in
Mode 3 special care must be taken to meet this requirement. See furtherexplanationunder SAR, SR, Modes, and ApplicationsInformation.
INT is in a high
7

CDP68HC68A2
Mode Select Register (MSR)
Address/Control: (R/W)0010000 - $10
Read/Write: Yes
76543210
0 0
EXT VR M8 IE M1 M0 $10
The read/write register is used to select the various modes
of operation of the A2. Bits 6 and 7 are “don’t cares” and can
be set as either 1 or 0. The functions of bits 0 through 5 are
as follows:
B5,
EXT The External Oscillator bit (EXT) is used to
select between an external or an internal (single
pin oscillator) clock source at pin 1 (OSC) of the
A2. If
EXT is low, an external clock is selected
and the OSC pin functions as an input. If
EXT is
high, an internal clock is selected and the OSC
pin functions as a one pin oscillator. See Table 2
for typical frequencies of the internal oscillator.
B4, VR The Voltage Reference (VR) bit is used to select
the source of the voltage reference. When VR is
0, V
is used as the full scale reference for the
DD
A/D converter. When VR is 1, the voltage at AI0
serves as the full scale reference for the A/D
converter. When VR = 1, the digital reading of
any active channel which exceeds the AI0 reference voltage will be “clipped” to the full scale
value of $3FF ($FF for 8-bit mode).
B3, M8 The Eight Bit Mode (M8) bit selects either 10-bit
or 8-bit as the mode of operation. A low (0) in
this bit enables the 10-bit mode, while a high (1)
enables the 8-bit mode.
B2, IE The Interrupt Enable (IE) bit is used to enable
the
INT output function on pin 2. A low (0) dis-
ables the interrupt function and maintains
INT in
a high impedance state. A high enables the
interrupt function, allowing
INT to be driven low
at the appropriate times in Modes 1 and 2.
B1, M1 Mode Select, bit 1. This bit is used along with
M0 to select the conversion mode, shown in
Table 1, of the A/D converter.
B0, M0 Mode Select, bit 0. This bit is used along with
M1 to select the conversion mode, shown in
Table 1, of the A/D converter.
TABLE 1. CONVERSION MODES
M1 M2 MODE DESCRIPTION
0 0 0 Idle
Channel Address Register (CAR)
Address/Control: Not Addressable
The CAR contains the address of the next channel to
convert during Modes 1, 2, and 3. During multiple byte reads
of the Data Registers, the CAR contains the address of the
channel to read and is advanced, to the next higher active
channel, following each read. When advancing, the CAR
skips any channel not selected in the CSR. After
incrementing to the highest active channel, the CAR will
return to the lowest active channel.
The CAR is not directly accessible. It can be jammed via a
write to the SAR or by transmitting an Address/Control Byte
which addresses any Data Register. Note: addressing a
Data Register to set the CAR is valid only under certain
circumstances - see the following boxed caution. When
jamming the CAR via the SAR, the specified channel does
not need to be selected in the CSR. The CAR’s contents are
read as part of the SR. See the descriptions of the SAR and
the SR for details.
NOTE: CAUTION! When addressing Data Registers, the user must
ensure that the contentsof theCAR match the addressportion of the
Address/Control Byte. Failure to do so may result in corrupted data.
This condition is generally met in Modes 1 and 2. When running in
Mode 3 special care must be taken to meet this requirement. See furtherexplanationunder SAR, SR, Modes, and ApplicationsInformation.
Channel Select Register (CSR)
Address/Control: (R/W)0010001 - $11
Read/Write: Yes
76543210
C7 C6 C5 C4 C3 C2 C1 C0 $11
This read/write register is used to designate the active
analog input channels. Channels which are not active will be
skipped during conversions and multiple byte reads, unless
specifically selected by writing to the SAR. Setting a bit high
in CSR selects the associated channel, while setting a bit
low deselects the channel. Each Cn bit in the CSR corresponds to an AIn pin on the A2 device. Example: setting C7
= C4 = 1 and setting all other bits to 0 will select AI7 and AI4
as inputs to the A/D multiplexer.
Starting Address Register (SAR)
Address/Control: (R/W)0010010 - $12
Read/Write: Yes
76543210
ENC
0 0
SAE CA2 CA1 CA0 H/L $12
0 1 1 Single Conversion
1 0 2 Single Scan
1 1 3 Continuous Scan
This register is used to enable conversions in all modes and
to set the address of the current channel in the CAR. Prior
to, or simultaneously with, enabling conversions, the CAR
must be set to a known state via the SAR. Once set, the
contents of the CAR determine the first channel to be
converted when conversions are enabled - hence the name
“Starting Address Register”. The CAR may be jammed with
8

CDP68HC68A2
the number of a channel which is not selected in the CSR.
After the specified channel is converted, subsequent
conversions proceed in ascending order, skipping channels
not selected in the CSR. Therefore, jamming the CAR with a
non-selected channel number will cause a conversion to be
performed on that channel once and only once.
After stopping a Mode 2 or 3 conversion (by setting ENC
low), the CAR must be jammed to match the channel
address prior to initiating Data Register reads. If an
Address/Control Byte is sent to begin reads from a Data
Register other than the one currently addressed by the CAR,
the contents of the Data Register may be corrupted. If the
CAR contents are known, single or multiple byte reads can
be properly made, by sending a matching Address/Control
Byte.
Bits 5 and 6 in the SAR are “don’t cares” and can be set to
either 0’s or 1’s. The functions of the remaining bits are as
follows:
B7, ENC The Enable Conversions (ENC) bit is used to
synchronously switch on and off the successive
approximation A/D converter. When this bit is
set high, the appropriate conversion operation
(as defined in the MSR) is initiated. Setting the
ENC bit low stops the conversion operation. If a
channel is being converted when ENC is
cleared, the conversion of that channel will complete and further conversions will be inhibited.
B4, SAE Starting Address Enable (SAE). If the SAR is
written to, with the SAE bit high, the CAR is
jammed with the value defined by CA2, CA1,
and CA0. If SAE is low, the CA2, CA1, and CA0
bits are ignored.
B3, CA2 Channel Address, bit 2. When writing to the
SAR with SAE high, CA2, CA1, and CA0 form a
3-bit channel address which is used to set the
CAR and select the first channel to be converted
or read. Reading the SAR returns the previously
written values for these three bits. To determine
the contents of the CAR a read of the Status
Register (SR) must be performed.
B2, CA1 Channel Address, bit 1. See discussion under
CA2.
B1, CA0 Channel Address, bit 0. See discussion under
CA2.
B0,
H/L High/Low. For most applications, the SAR
should be written with
with CA2, CA21, and CA0, this bit is used to
select a specific High or Low Data Register.
only has significance in 10-bit mode. The 10-bit
read sequence is High Data Register followed
by Low Data Register for each channel read.
When jamming the CAR prior to reads,
should be set low, unless the user specifically
wants to skip the first High Data Register. When
read, this bit, indicates whether the next Data
Register read will access the High or Low Data
Register.In 8-bit mode,
H/L as a 0. In combination
H/L
H/L
H/L is ignored by the A2.
Status Register (SR)
Address/Control: 00010011 - $13
Read/Write: Read Only
76543210
INT ACC CIP CA2 CA1 CA0 $13
This is a read only register used to monitor the status of the
A/D converter. If an Address/Control Byte of $13 is sent to
the A2, the Status Register will be addressed and will remain
addressed until the CE pin is brought low. This provides efficient polling of the SR by allowing multiple reads of the SR
with only one Address/Control Byte transmission.
Bits 0 and 4 of the SR are always read as lows. The
significance of each of the other bits is:
B7, INT Interrupt. In Modes 1 and 2, this bit is set high
under the same conditions that the
would be activated (see Conversion Modes).
Once set, the INT bit can be cleared by reading
the SR, reading any Data Register, or writing to
the MSR or CSR. The INT bit is not affected by
the state of the IE bit in the MSR.
B6, ACC All Conversions Complete bit. When high, this
status bit indicates that conversions have been
completed on all channels selected in the CSR.
It is cleared by reading any of the Data Registers or by writing to the MSR or CSR. In 10-bit
mode, ACC = 1 implies that the DV bits of all
active channels are true (see Data Registers).
This bit is often used in Modes 2 and 3. In Mode
1, ACC will only be set if conversions are explicitly invoked (via writes to the SAR) for each
channel selected in the CSR.
B5, CIP Conversion In Progress bit. This bit is logically
high when a conversion is initiated and goes low
when a conversion completes. In the scanning
modes, Modes 2 and 3, CIP will go low momentarily between successive channels and cannot
be used in lieu of ACC in Mode 2.
NOTE: Following a write of $00 to the SAR, to
terminate Mode 3 conversions, CIP may remain
high until cleared with a write to the MSR or the
CSR or with the read of a Data Register or with
a write to the SAR with ENC or SAE = 1. CIP = 1
is not a true indication of an ongoing conversion.
See “Mode 3 - Continuous Scan”
B3, CA2 Channel Address Register, bit 2. CA2, CA1,
and CA0 form a three bit binary number that
indicates the current contents of the CAR. The
CAR is originally set by the user via the SAR
(see SAR). The CAR is automatically incremented following reads of Data Registers and
following conversions in the scanning modes
(Modes 2 and 3). The Status Register can be
read at any time. Reading CA2 - CA0 during
Modes 2 and 3 will produce changing channel
addresses as the conversions proceed.
0 0
INT pin
9

CDP68HC68A2
B2, CA1 Channel Address, bit 1. See discussion under
CA2.
B1, CA0 Channel Address, bit 0. See discussion under
CA2.
Data Registers
Address/Control: 0000000 to 0000111 - $00 to $0F
Read/Write: Read Only
High
H/L = 0
Low
H/L = 1
DV DOV D9 D8
76543210
D7 D6 D5 D4 D3 D2 D1 D0
76543210
0 0 0 0
The Data Registers are used to store the results of A/D conversions. There are two registers, a High Data Register and
a Low Data Register, associated with each channel.
In 8-bit mode, the High Data Registers are inaccessible, and
each Low Data Register holds the 8-bit result of the most
recent conversion of its associated channel. The values
range from $00 (AIn = V
) to a full scale reading of $FF.
SS
During multiple byte Data Register reads, the address (held
in the CAR) is advanced to the Low Data Register of the next
active channel (as specified in the CSR) followingeach read.
In 10-bit mode, bits 0 and 1 of the High Data Register
together with the contents of the Low Data Register hold the
result of the most recent conversion to the associated
channel. The values range from $000 (AIn = V
) to a full
SS
scale reading of $3FF. During multiple byte Data Register
reads, the address (held in the CAR) is automatically
advanced from the High Data Register to the Low Data
Register. Following a read of the Low Data Register, the
address advances to the High Data Register of the next
active channel (as specified in the CSR).
Two status flags are maintained for each channel. In 10-bit
mode these status flags are provided in the High Data
Register. In 8-bit mode they are not available to the user.
Their functions are:
B7, DV The Data Valid bit indicates whether the corre-
sponding channel has been converted since it
was last read. DV is set upon completion of a
conversion on the corresponding channel. DV is
cleared by reading the Data Register or by a
write to the MSR or the CSR.
NOTE: A write to the SAR does not clear the DV flag
for each channel. This implies that if: conversion are
completed on all registers selected in CSR; conversions stopped; an incomplete read of the Data Registers is performed; and conversions reinitiated with a
write to the SAR - some DVs will still be set. In Mode
2, which terminates when all DVs are true (ACC goes
true), unread channels may not be converted, unless
CSR is written to, before setting ENC.
B6, DOV The Data Overrun (DOV) bit indicates that more
than one conversion has been performed on a
channel since it was last read. This bit is only
valid in Modes 1 and 3. DOV is cleared by reading the Data Register or by performing a write to
the CSR or the MSR.
Conversion Modes of the CDP68HC68A2
Mode 0 - Idle
On power_up, the MSR is reset to all 0’s placing the A2 into
Mode 0. After power_up, the user can effectively reset the
A2 by selecting Mode 0 via the MSR. Setting the A2 to Mode
0, at any time, will abort any current conversions and force
the
INT pin to a high impedance state. In mode 0, if EXT is
high in the MSR, the one pin, internal oscillator is placed in a
low power, shutdown mode and internal clocking of the A/D
converter is inhibited. If
clocking of the A/D converter is inhibited.
Mode 1 - Single Conversion
In Mode 1, conversions are performed on command. After setting Mode 1 in the MSR, a write to the SAR with ENC high will
initiate a conversion on the channel currently selected by the
CAR. Note: this channel does not haveto be active in the CSR.
When using the internal oscillator,the oscillator is enabled. The
CIP flag in the SR will be set when the conversion begins.
Upon completion of the conversion, the INT bit in the SR will
be set, the CIP flag will cleared, and, if IE is true in the MSR,
the
INT pin will be driven low (if all channels specified in the
CSR have been converted since the last Data Register read
the ACC bit in the SR will also be set). Finally, if it’s active,
the internal oscillator will be stopped.
Another conversion can be initiated with a write to the SAR.
However, the normal procedure is to read the results of the
first conversion. This does two things: first it clears the INT
flag (the
INT pin is returned to a high impedance state);
second a conversion is automatically started on the next
channel selected in the CSR. This read-convert pattern can
be continued indefinitely.
When reading Data Registers in Mode 1, the user can be
certain that the contents of the CAR equal the channel number which was just converted. Thus the Address/Control
Byte sent prior to the read will automatically match the CAR.
If a read from a Data Register, other than the one just converted, is performed, the CAR must be set to the desired
register prior to sending the Address/Control Byte. Setting
CAR is done by writing the SAR with ENC = 0, SAE = 1, and
the CA2 - CA0 bits equal to the desired channel.
Mode 2 - Single Scan
In mode 2, when ENC is set in the SAR, conversions are performed on all channels selected in the CSR. Conversions
begin on the channel specified by the CAR (this channel does
not have to be active in the CSR) and proceed in ascending
order until all channels selected in the CSR have been converted. If the starting channel is not the lowest active channel,
when the highest active channel is done converting, the CAR
advances to the lowest active channel and continues from that
point until all channels have been converted once.
When ENC is set i n the SAR, the internal clock is activated
(if selected), the CIP flag is set in the SR, and conversions
begin. The CIP flag doesn’t remain high, as it momentarily
goes low between each channel conversion.
EXT is low in the MSR, internal
10

CDP68HC68A2
When all channels have been converted the INT and ACC
flags in the SR are set, the
INT pin is driven low (if IE is true
in the MSR), the CIP flag is cleared, and, if active, the
internal oscillator is disabled.
Data Registers can safely be read after all channels have
been converted. If the starting channel was a channel active
in the CSR then the CAR will one again be pointing to that
channel (providing all channels had been read or CSR or
MSR written since the last set of conversions - see Note
below). IF a read from a Data Register, other than the one
first converted, is performed, the CAR must be set to the
desired register prior to sending the Address/Control Byte.
Setting CAR is done by writing the SAR with ENC = 0, SAE
= 1, and the CA2 - CA0 bits equal to the desired channel.
NOTE: A write to the SAR does not clear the DVflag for each channel. This implies that if: conversions are completed on all registers
selected in CSR; conversions stopped; an incomplete read of the
Data Registers is performed; and conversionsreinitiated with a write
to the SAR - some DVs will still be set. In Mode 2, which terminates
when all DVsare true (ACCgoes true), unread channels may not be
converted unless CSR is written to before setting ENC.
There are two ways to prematurely stop conversions in Mode
2. The first is to perform any “abort” action (see Abort Modes).
Perf orming an abort, may produce spurious conversion values. The second, and preferred means to stop a Mode 2 conversion, is to clear the ENC bit by writing a $00 to the SAR.
Clearing ENC will synchronously stop conversions at the end
of the current conversion. When prematurely stopping conversions, CIP is not valid. The CIP flag cannot be used to determine when the current conversion is complete. Instead, a time
delay equal to one conversion time must be built into the software. The appropriate delay will ensure the last conversion is
complete before Data Register reads begin.
conversions in Mode 3. The first is to perform any “abort”
action (see Abort Modes). Performing an abort, may produce spurious conversion values. The second, and preferred
means to stop a Mode 3 conversion, is to clear the ENC bit
by writing a $00 to the SAR. Clearing ENC will
synchronously stop conversions at the end of the current
conversion. CIP is not valid following the clearing of ENC.
The CIP flag cannot be used to determine when the current
conversion is complete. Instead, a time delay equal to one
conversion time must be built into the software. The
appropriate delay will ensure the last conversion is complete
before Data Register reads begin.
The Data Registers can safely be read after ENC is cleared
and one conversion time has elapsed. One remaining task is
to be certain the contents of the CAR match the address
sent in the Address/Control Byte. This is done by jamming
the CAR with a write to the SAR with ENC = 0, SAE = 1, and
CA2 - CA0 equal to the desired channel address.
Abort Modes
Any active mode can be aborted by any one of the following
means:
1. A write to the MSR
2. A write to the CSR
3. A write to the SAR with ENC and/or SAE = 1
4. A read of any Data Register
The contents of Data Registers are not guaranteed following
an abort. Writing a $00 to the MSR is equivalent to a reset.
To synchronously stop conversions in Modes 2 or 3 set the
SAR to $00 (See Mode 2 and Mode 3).
Prematurely stopping the conversions leaves the CAR in an
unknown state. One remaining task, before Data Registers
are read, is to be certain the contents of the CAR match the
address sent in the Address/Control Byte. This is done by
jamming the CAR with a write to the SAR with ENC = 0,
SAE=1,CA3-CA2-CA0equal to the desired channel
address.
Mode 3 - Continuous Scan
In Mode 3, when ENC is set in the SAR, conversions are
performed on all channels selected in the CSR. COnversion
begin on the channel specified by the CAR (this channel
does not have to be active in the CSR) and proceed in
ascending order for all channels selected in the CSR. Each
time the highest active channel is done converting, the CAR
advances to the lowest active channel and continues from
that point.
When ENC is set in the SAR, the internal clock is activated
(if selected) and conversions begin.
When all channels have been converted one time the ACC
flag in the SR is set. This is the only valid status flag in Mode
3. The CIP flag is not valid in Mode 3. The INT flag and the
INT pin are both held in a disabled state during Mode 3.
Data Registers cannot be read until Mode 3 conversions
have been terminated. There are two ways to stop
Analog Inputs
Shown in Figure 5 is a simplified equivalentcircuit representing the input to the Analog to Digital Converter through the
multiplexer as seen from each AIn pin.
Due to the nature of the switched capacitor array used by the
successive approximation A/D, two important points are
noted here:
1. A property ofcapacitive input is the intrinsic sampleand
hold function. This provides all that is necessary to
accurately sample a point on an input waveform within
the input bandwidth shown in the specifications (under
1.5 conversion oscillator cycles).
2. The input to the capacitor network appears as an RC
network with a time constant and therefore places
constraints on the source impedance. The charging time
and therefore the accuracy of the conversion will be adversely affected by increasing the source impedance.
It is recommended to set the conversion oscillator frequency
in accordance with the input impedance in order to allow
sufficient time (the 1.5 T
waveform through the modeled input low pass filter network
which includes the input source in a series circuit with the
internal impedance.
cycles) to sample a changing
OSC
11

CDP68HC68A2
V
CC
SIGNAL
INPUT
D1
D2
R1
85ΩC1400pF
V1
V
2.5V
FIGURE 5A. ANALOG INPUT DURING SAMPLE TIME
V
CC
D1
SIGNAL
INPUT
D2
OPEN
CIRCUIT
FIGURE 5B. ANALOG INPUT DURING HOLD AND IDLE TIME
The time constant (τ) for the input network is R
R
EFFRSRNETCNET
τ R
EFFCNETRS
400pF and R
50Ω+()400pF.==
NET
EFFCNET
50Ω.
=,=,+=
.
8τ is required during the first 1.5 sample clock cycles to
sufficiently encode 10-bit conversion. Therefore, 1.5 T
and T
For example, if R
432kHz, and T
of 32µs. An internal C
S
TS1/f
then f
SAMPLE
f
SAMPLE
≥ 5.33 R
SAMPLE
4.688 108×()RS85Ω+()⁄ .≤
C.
EFF
,=
5.33 RS85Ω+()400pF[]1,–≤
= 1000, f
S
= 2.3µs. This yields a 10-bit conversion time
S
OSC
SAMPLE
≥ 68pF, see chart.
must be less than
S
≥ 8τ
The maximum frequency is limited by the device specification (see characteristics) and by the (R
) Series input resis-
S
tance:
The Internal Schmitt Oscillator
Figure 6 shows a simplified model of the Schmitt oscillator
used to help familiarize the user with its operation. Table 2
shows typical internal oscillator frequency versus
capacitance at 5V and 25
TABLE 2. TYPICAL OSCILLATOR FREQUENCY vs
CAPACITANCE AT V
C(pF) f(MHz) C(pF) f(MHz)
18 1.0 - 3.0 218 0.148 - 0.40
38 0.65 - 2.0 318 0.111 - 0.25
48 0.54 - 1.6 409 0.107 - 0.23
68 0.38 - 1.1 528 0.072 - 0.17
118 0.26 - 0.75 1018 0.040 - 0.10
When measuring the oscillator, probe capacitance will affect
frequency. An alternative to direct frequency measurement
of the oscillator input is to measure the interval between
successive interrupts in modes 1 and 2.
D1
OSCILLATOR
INPUT
FIGURE 6. EQUIVALENT CIRCUIT FOR OSCILLATOR INPUT
OSC
EXTERNAL
CAP
330pF
D2
o
C.
= 5V, TA = 25oC
DD
V
DD
PMOS
Q3
I1
200µA
I2
200µA
NMOS
Q4
V
SS
CONTROL
N1
HYSTERESIS
COMPARATOR
N2
CONTROL
R
4.688 108×()/f
[]85Ω.–≤
S
SAMPLE
For example, for a 1MHz sample clock R
max = 385Ω.
S
12

Dual-In-Line Plastic Packages (PDIP)
CDP68HC68A2
N
D1
-C-
E1
-B-
A1
A2
E
A
L
e
C
C
L
e
A
C
e
B
INDEX
AREA
BASE
PLANE
SEATING
PLANE
D1
B1
1 2 3 N/2
-AD
e
B
0.010 (0.25) C AM BS
NOTES:
1. Controlling Dimensions: INCH. Incase of conflict between English and
Metric dimensions, the inch dimensions control.
2. Dimensioning and tolerancing per ANSI Y14.5M-1982.
3. Symbols are defined in the “MO Series Symbol List” in Section 2.2 of
Publication No. 95.
4. Dimensions A, A1 andL are measuredwith the packageseated in JEDEC seating plane gauge GS-3.
5. D, D1, and E1 dimensions do not include mold flash or protrusions.
Mold flash or protrusions shall not exceed 0.010 inch (0.25mm).
6. E and are measured withthe leads constrainedto be perpendic-
e
A
ular to datum .
-C-
7. eBand eCare measured at thelead tipswith the leads unconstrained.
eC must be zero or greater.
8. B1 maximum dimensions do not include dambar protrusions. Dambar
protrusions shall not exceed 0.010 inch (0.25mm).
9. N is the maximum number of terminal positions.
10. Corner leads (1, N, N/2 and N/2 + 1) for E8.3, E16.3, E18.3, E28.3,
E42.6 will have a B1dimension of 0.030 - 0.045 inch (0.76- 1.14mm).
E16.3 (JEDEC MS-001-BB ISSUE D)
16 LEAD DUAL-IN-LINE PLASTIC PACKAGE
INCHES MILLIMETERS
SYMBOL
A - 0.210 - 5.33 4
A1 0.015 - 0.39 - 4
A2 0.115 0.195 2.93 4.95 -
B 0.014 0.022 0.356 0.558 B1 0.045 0.070 1.15 1.77 8, 10
C 0.008 0.014 0.204 0.355 -
D 0.735 0.775 18.66 19.68 5
D1 0.005 - 0.13 - 5
E 0.300 0.325 7.62 8.25 6
E1 0.240 0.280 6.10 7.11 5
e 0.100 BSC 2.54 BSC e
A
e
B
0.300 BSC 7.62 BSC 6
- 0.430 - 10.92 7
L 0.115 0.150 2.93 3.81 4
N16 169
NOTESMIN MAX MIN MAX
Rev. 0 12/93
13

CDP68HC68A2
Small Outline Plastic Packages (SOIC)
N
INDEX
AREA
123
-A-
E
-B-
SEATING PLANE
D
A
-C-
0.25(0.010) BM M
H
L
h x 45
o
α
e
B
0.25(0.010) C AM BS
M
NOTES:
1. Symbols are defined in the “MO Series Symbol List” in Section 2.2 of
Publication Number 95.
2. Dimensioning and tolerancing per ANSI Y14.5M-1982.
3. Dimension “D” does not include mold flash, protrusionsor gate burrs.
Mold flash, protrusionand gate burrsshall not exceed 0.15mm (0.006
inch) per side.
4. Dimension “E” doesnotinclude interlead flashorprotrusions. Interlead
flash and protrusions shall not exceed 0.25mm (0.010 inch) per side.
5. The chamfer on the body is optional. If it is not present, a visual index
feature must be located within the crosshatched area.
6. “L” is the length of terminal for soldering to a substrate.
7. “N” is the number of terminal positions.
8. Terminal numbers are shown for reference only.
9. The lead width “B”, as measured 0.36mm (0.014 inch) or greater
above the seating plane, shall not exceed a maximum value of
0.61mm (0.024 inch)
10. Controlling dimension: MILLIMETER. Converted inch dimensions
are not necessarily exact.
A1
C
0.10(0.004)
M20.3 (JEDEC MS-013-AC ISSUE C)
20 LEAD WIDE BODY SMALL OUTLINE PLASTIC PACKAGE
INCHES MILLIMETERS
SYMBOL
A 0.0926 0.1043 2.35 2.65 -
A1 0.0040 0.0118 0.10 0.30 -
B 0.013 0.0200 0.33 0.51 9
C 0.0091 0.0125 0.23 0.32 D 0.4961 0.5118 12.60 13.00 3
E 0.2914 0.2992 7.40 7.60 4
e 0.050 BSC 1.27 BSC H 0.394 0.419 10.00 10.65 h 0.010 0.029 0.25 0.75 5
L 0.016 0.050 0.40 1.27 6
N20 207
o
α
0
o
8
o
0
o
8
Rev. 0 12/93
NOTESMIN MAX MIN MAX
-
All Intersil semiconductor products are manufactured, assembled and tested under ISO9000 quality systems certification.
Intersil products are soldby description only.Intersil Corporation reservesthe right to makechanges in circuit designand/or specifications at anytime without notice.
Accordingly ,the reader is cautioned to verify that data sheets are current before placing orders. Information furnished by Intersil is believed to be accurate and reliable. However, no responsibility is assumed by Intersil or its subsidiaries for its use; nor for any infringements of patents or other rights of third parties which may
result from its use. No license is granted by implication or otherwise under any patent or patent rights of Intersil or its subsidiaries.
For information regarding Intersil Corporation and its products, see web site http://www.intersil.com
Sales Office Headquarters
NORTH AMERICA
Intersil Corporation
P. O. Box 883, Mail Stop 53-204
Melbourne, FL 32902
TEL: (407) 724-7000
FAX: (407) 724-7240
EUROPE
Intersil SA
Mercure Center
100, Rue de la Fusee
1130 Brussels, Belgium
TEL: (32) 2.724.2111
FAX: (32) 2.724.22.05
14
ASIA
Intersil (Taiwan) Ltd.
Taiwan Limited
7F-6, No. 101 Fu Hsing North Road
Taipei, Taiwan
Republic of China
TEL: (886) 2 2716 9310
FAX: (886) 2 2715 3029
 Loading...
Loading...