


SCORA-ER 14
User Manual
Catalog #100067 Rev. B


Copyright 2003 Intelitek Inc.
SCORA-ER 14
Catalog # 100067 Rev. B
March 1996
Every effort has been made to make this book as complete and accurate as possible. However, no
warranty of suitability, purpose, or fitness is made or implied. Intelitek is not liable or responsible
to any person or entity for loss or damage in connection with or stemming from the use of the
software, hardware and/or the information contained in this publication.
Intelitek bears no responsibility for errors that may appear in this publication and retains the right
to make changes to the software, hardware and manual without prior notice.
Safety Warning!
Use the SCORA-ER 14 with extreme caution.
The SCORA-ER 14 can be dangerous and can cause severe injury.
Setup up a protective screen or guard rail around the robot to keep people away from its
working range.
INTELITEK INC.
444 East Industrial Park Drive
Manchester NH 03109-537
Tel: (603) 625-8600
Fax: (603) 625-2137
Web site www.intelitek.com
Table of Contents
CHAPTER 1
CHAPTER 2
CHAPTER 3
CHAPTER 4
Unpacking and Handling
Unpacking and Handling the Robot . . . . . . . . . . . . . 1-1
Repacking for Shipment . . . . . . . . . . . . . . . . . . . 1-1
Acceptance Inspection . . . . . . . . . . . . . . . . . . . . 1-2
Specifications
Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Work Envelope . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Safety
Precautions . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Installation
Preparations . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Controller and Computer/Terminal Setup . . . . . . . . 4-1
Robot Setup . . . . . . . . . . . . . . . . . . . . . . . 4-1
SCORA-ER 14 Installation . . . . . . . . . . . . . . . . . . 4-2
Controller Installation . . . . . . . . . . . . . . . . . . 4-2
Robot Installation . . . . . . . . . . . . . . . . . . . . 4-2
Homing the Robot . . . . . . . . . . . . . . . . . . . . 4-4
Gripper Installation . . . . . . . . . . . . . . . . . . . . . . 4-5
Pneumatic Gripper . . . . . . . . . . . . . . . . . . . . 4-5
Servo Gripper . . . . . . . . . . . . . . . . . . . . . . 4-7
Activating the Gripper . . . . . . . . . . . . . . . . . . 4-8
CHAPTER 5
CHAPTER 6
Operating Methods
Software . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
ACL . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
ATS . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
ACLoff-line . . . . . . . . . . . . . . . . . . . . . . . . 5-2
SCORBASE . . . . . . . . . . . . . . . . . . . . . . . 5-2
Teach Pendant . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Drive System
Axes 1 and 2 . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
Axis 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Axis 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
DC Motor Structure . . . . . . . . . . . . . . . . . . . 6-4
SCORA-ER 14 Motors . . . . . . . . . . . . . . . . . . 6-5
Harmonic Drive Gear . . . . . . . . . . . . . . . . . . . . . 6-6
Pulleys and Timing Belt . . . . . . . . . . . . . . . . . . . 6-8
User’s Manual- v -SCORA-ER 14
9603
Ball Bearing Screw . . . . . . . . . . . . . . . . . . . . . . 6-9
Worm Gear . . . . . . . . . . . . . . . . . . . . . . . . . . 6-10
Ball Bearing Spline . . . . . . . . . . . . . . . . . . . . . . 6-10
Axis Gear Ratios . . . . . . . . . . . . . . . . . . . . . . . 6-11
CHAPTER 7
CHAPTER 8
CHAPTER 8
Position and Limit Devices
Encoders . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Encoder Resolution . . . . . . . . . . . . . . . . . . . 7-3
End of Travel (Limit) Switches . . . . . . . . . . . . . . . . 7-4
Hard Stops . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Home Switches . . . . . . . . . . . . . . . . . . . . . . . 7-6
Wiring
Power (Robot) Cable and Connector . . . . . . . . . . . . 8-2
Encoder Cable and Conenctor . . . . . . . . . . . . . . . . 8-3
Warning Light Cable and Connector . . . . . . . . . . . . . 8-4
Maintenance
Daily Operation . . . . . . . . . . . . . . . . . . . . . . . . 9-1
Periodic Inspection . . . . . . . . . . . . . . . . . . . . . . 9-2
Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . 9-2
Messages . . . . . . . . . . . . . . . . . . . . . . . . . . 9-6
SCORA-ER 14- vi -User’s Manual
9603
Unpacking and Handling
‹
Read this chapter carefully before you unpack the SCORA-ER 14 robot and
controller.
Unpacking and Handling the Robot
The robot is packed in expanded foam.
Save the original packing materials and shipping carton. You may need them
later for shipment or for storage of the robot.
The robot arm weighs 35 kilos (77 pounds). Two people are needed in order to
lift or move it.
CHAPTER
1
Lift and carry the robot arm by grasping its column and/or base.
Do not lift or carry the robot arm by its horizontal links.
Repacking for Shipme nt
Be sure all parts are back in place before packing the robot.
The robot should be repacked in its original packaging for transport.
If the original carton is not available, wrap the robot in plastic or heavy paper. Put
the wrapped robot in a strong cardboard box at least 15 cm (about 6 inches)
longer in all three dimensions than the robot. Fill the box equally around the unit
with resilient packing material (shredded paper, bubble pack, expanded foam
chunks).
Seal the carton with sealing or strapping tape. Do not use cellophane or
masking tape.
User’s Manual 1 - 1 SCORA-ER 14
9603
Acceptance Inspection
After removing the robot arm from the shipping carton, examine it for signs of
shipping damage. If any damage is evident, do not install or operate the SCORA.
Notify your freight carrier and begin appropriate claims procedures.
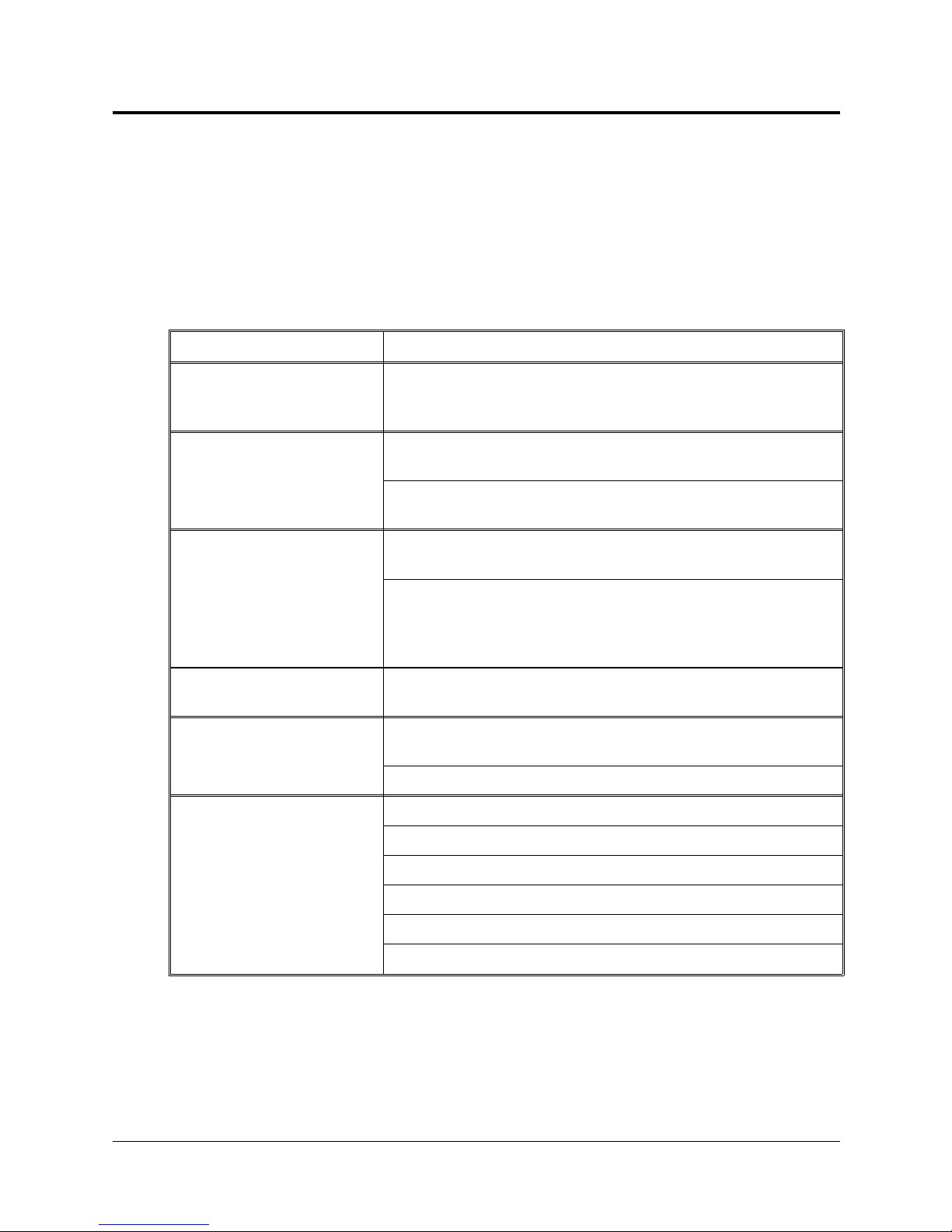
The following items are standard components in the SCORA-ER 14 package. Make
sure you have received all the items listed on the shipment’s packing list. If
anything is missing, contact your supplier.
Item Description
Includes: Cabling with air hoses;
SCORA-ER 14
Robot Arm
Hardware for mounting robot: 4 M8x60 bolts;
4 M8 washers; 4 M8 nuts.
Gripper
ACL
Teach Pendant
Software
Documentation
: 2 options
Controller-B
: optional
Pneumatic Gripper
6 M4x8 screws for mounting gripper.
Electric DC Servo Gripper
4 M4x10 screws for mounting gripper.
Includes: Power Cable 100/110/220/240VAC;
RS232 Cable; 3 driver cards for 6 axes
Optional:
Emergency By-Pass Plug (required when TP not connected);
Additional driver cards for control of up to 12 axes;
Auxiliary multiport RS232 board, cable and connectors.
Includes: mounting fixture; connector adapter plug.
Teach Pendant for Controller-B User’s Manual
ATS (Advanced Terminal Software) diskette;
includes
SCORBASE
SCORA-ER 14 User’s Manual
ACL
ACL for Controller-B Reference Guide
ATS for Controller-B Reference Guide
ACLoff-line
Level 5 Software diskette
Controller-B User’s Manual
includes pneumatic solenoid valve and
with encoder includes
software.
SCORA-ER 14 1 - 2 User’s Manual
ACLoff-line User’s Manual
SCORBASE Level 5 for Controller-B Version Reference Guide
9603
CHAPTER
Specifications
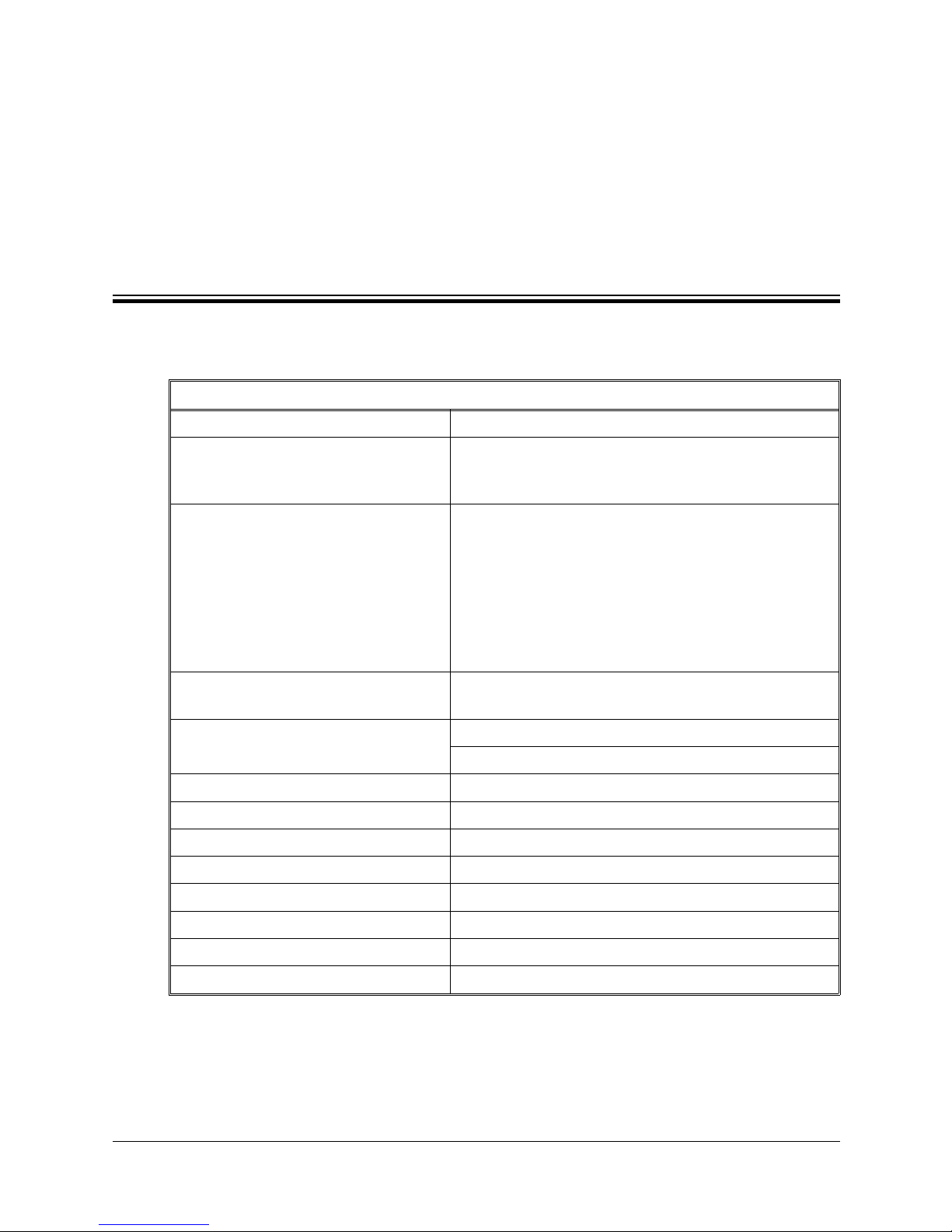
The following table gives the specifications of the SCORA-ER 14 robot arm.
Robot Arm Specifications
Mechanica l Str uc tu re Horizontal ar ti cu la te d (S CA R A)
Arm Length
Link 1
Link 2
Axis Movement Axis Range Effective Speed
270mm (10.6")
230mm (9.0")
2
Axis 1: Rotation
Axis 2: Rotation
Axis 3: Translation
Axis 4: Roll; without gripper cable:
or Roll; with gripper cable:
Links 1 and 2 combined 1.5m/sec
Maximum Operating Radius
End Effector
Hard Home Fixed position on all axes
Feedback Incremental optical encoders with index pulse
Actuators DC servo motors
Transmission Harmonic Drive gears
Maximum Payload 2 kg (4.4 lb.)
Position Repeatability
Weight 30 kg (66 lb.)
Ambient Operating Temperature 2°–40°C (36°–104°F)
288° 117°/sec
218° 114°/sec
182mm 211mm/sec
unrestricted
527°
±
Minimum 230mm (9.06")
Maximum 500 mm (19.69")
Pneumatic Gripper
Electric DC servo Gripper
0.05mm (±0.002")
±
370°/sec
User’s Manual 2 - 1 SCORA-ER 14
9603
Structure
Axis No. Motion
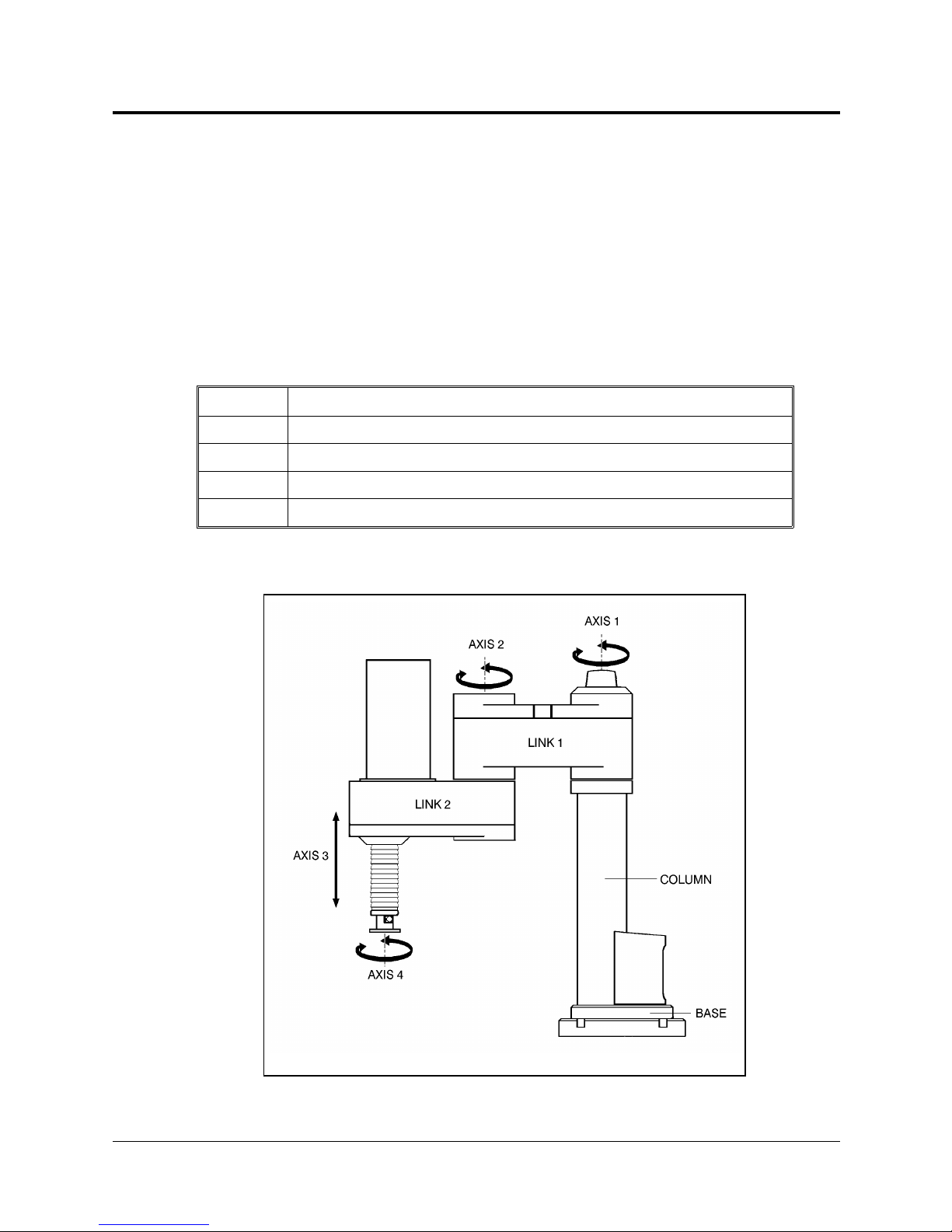
The SCORA-ER 14 is a horizontal articulated (SCARA) robot.
The first two joints are revolute and determine the position of the end effector in
the XY plane. The third joint is prismatic and determines the height (Z coordinate)
of the end effector.
Figure 2-1 identifies the joints and links of the mechanical arm.
Each joint is driven by a servo DC motor via a Harmonic Drive gear transmission.
The following table describes the movement of the axes:
1 Rotates Link 1 in horizontal (XY) plane.
2 Rotates Link 2 in horizontal (XY) plane.
3 Translates (raises and lowers) the end effector along Z axis.
4 Rotates the end effector.
SCORA-ER 14 2 - 2 User’s Manual
Figure 2-1: SCORA-14 Mechanical Arm
9603
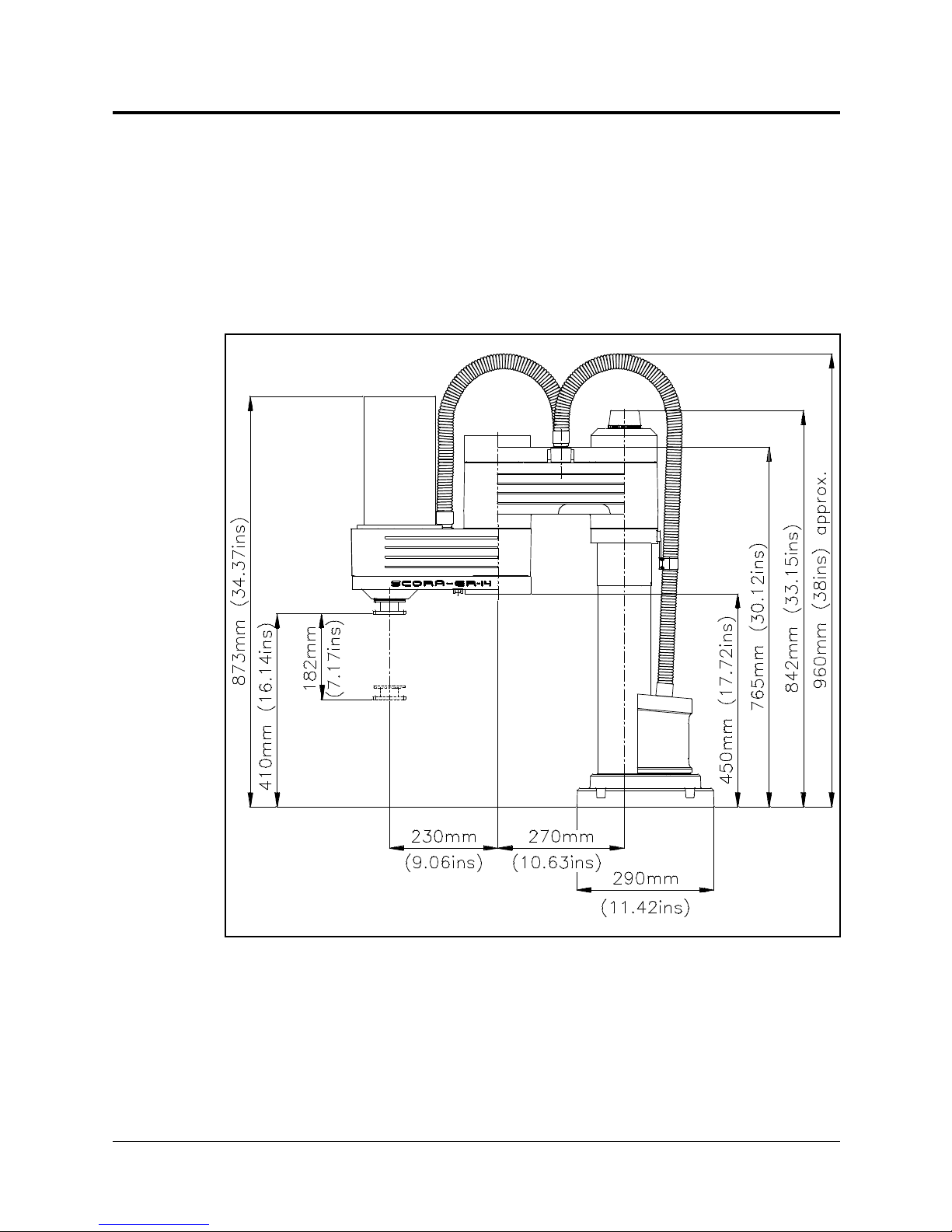
Work Envelope
The length of the links and the degree of rotation of the joints determine the
robot’s work envelope. Figures 2-2 and 2-3 show the dimensions of the
SCORA-ER 14, while Figure 2-4 gives a top view of the robot’s work envelope.
The base of the robot is normally fixed to a stationary work surface. It may,
however, be attached to a slidebase, resulting in an extended working range.
User’s Manual 2 - 3 SCORA-ER 14
9603
Figure 2-2: Dimensions (Side View)
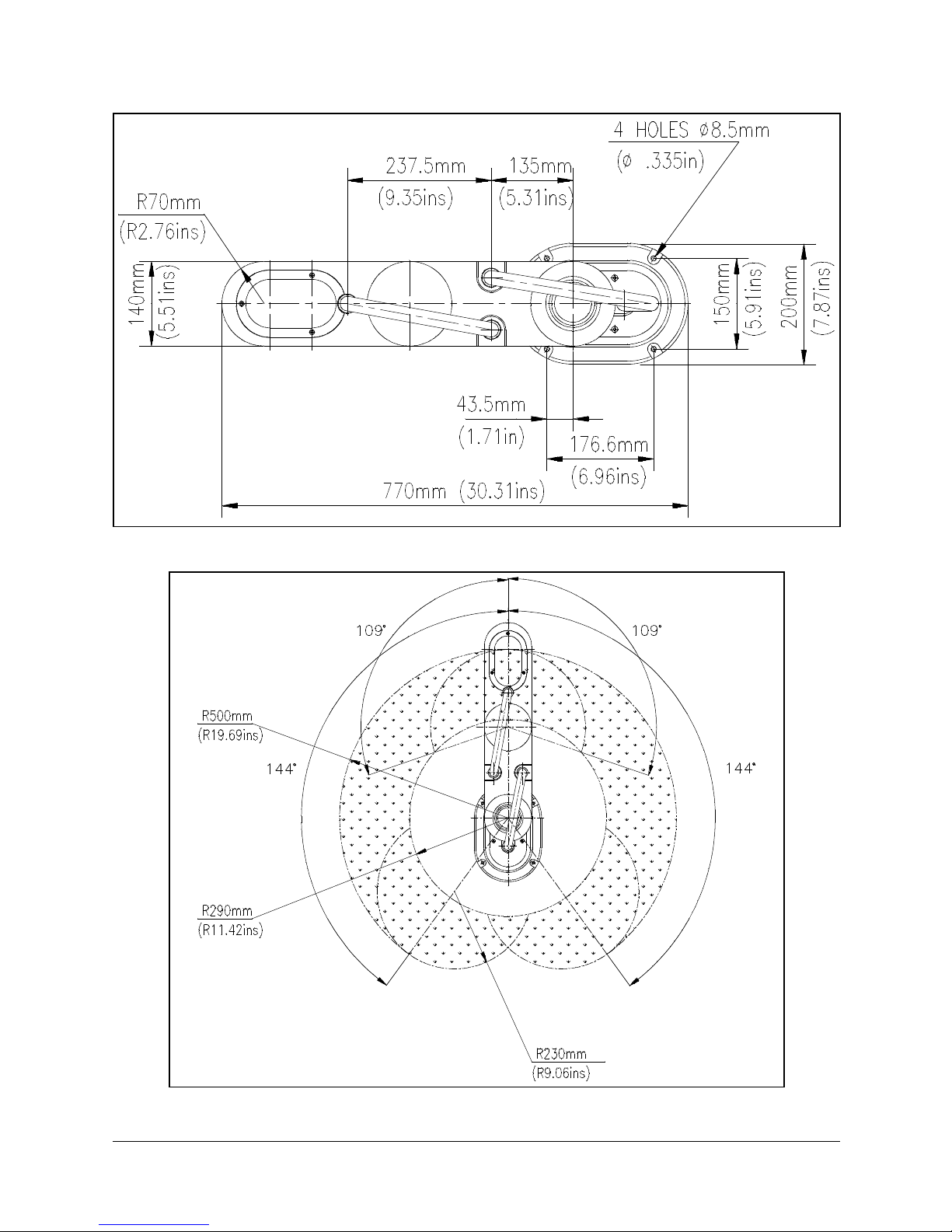
Figure 2-3: Dimensions (Top View)
SCORA-ER 14 2 - 4 User’s Manual
Figure 2-4: Working Range (Top View)
9603
The SCORA-ER 14 is a potentially dangerous machine. Safety during operation is
of the utmost importance. Use extreme caution when working with the robot.
Precautions
The following chapters of this manual provide complete details for proper
installation and operation of the SCORA-ER 14. The list below summarizes the
most important safety measures.
1. Make sure the robot base is properly and securely bolted in place.
2. Make sure the robot arm has ample space in which to operate freely.
Safety
CHAPTER
3
3. Make sure both the encoder cable and the robot power cable are properly
connected to the controller before it is turned on.
4. Make sure a guardrail or rope has been set up around the SCORA-ER 14 operating
area to protect both the operator and bystanders.
5. Do not enter the robot’s safety range or touch the robot when the system is in
operation.
6. Press the controller’s EMERGENCY switch before you enter the robot’s
operating area.
7. Turn off the controller’s POWER switch before you connect any inputs or
outputs to the controller.
‹
To immediately abort all running programs and stop all axes of motion, do any of
the following:
press the teach pendant’s EMERGENCY button;
use the ACL command A <Enter>;
press the controller’s red EMERGENCY button.
User’s Manual 3 - 1 SCORA-ER 14
9603

Warnings
1. Do not operate the SCORA-ER 14
User’s Manual and the
ACL
until you have thoroughly studied both this
Controller-B
User’s Manual. Be sure you follow the
safety guidelines outlined for both the robot and the controller.
2. Do not install or operate the
•
Where the ambient temperature drops below or exceeds the specified limits.
•
Where exposed to large amounts of dust, dirt, salt, iron powder, or similar
SCORA-ER 14 under any of the following conditions:
substances.
•
Where subject to vibrations or shocks.
•
Where exposed to direct sunlight.
•
Where subject to chemical, oil or water splashes.
•
Where corrosive or flammable gas is present.
•
Where the power line contains voltage spikes, or near any equipment which
generates large electrical noises.
3. Do not abuse the robot arm:
•
Do not operate the robot arm if the encoder cable is not connected to the
controller.
•
Do not overload the robot arm. The weight of the payload may not exceed
2kg (4.4 lb.). It is recommended that the workload be grasped at its center of
gravity.
•
Do not use physical force to move or stop any part of the robot arm.
•
Do not drive the robot arm into any object or physical obstacle.
•
Do not leave a loaded arm extended for more than a few minutes.
•
Do not leave any of the axes under mechanical strain for any length of time.
Especially, do not leave the gripper grasping an object indefinitely.
SCORA-ER 14 3 - 2 User’s Manual
9603
Installation
Preparations
Before you make any cable connections, set up the system components according
to the following “Preparation” instructions.
Controller and Computer/Terminal Setup
Place the controller and computer at a safe distance from the robot—well outside
the robot’s safety range.
Make sure the setup complies with the guidelines defined in the chapter,
“Safety,” in the ACL Controller-B User’s Manual.
CHAPTER
4
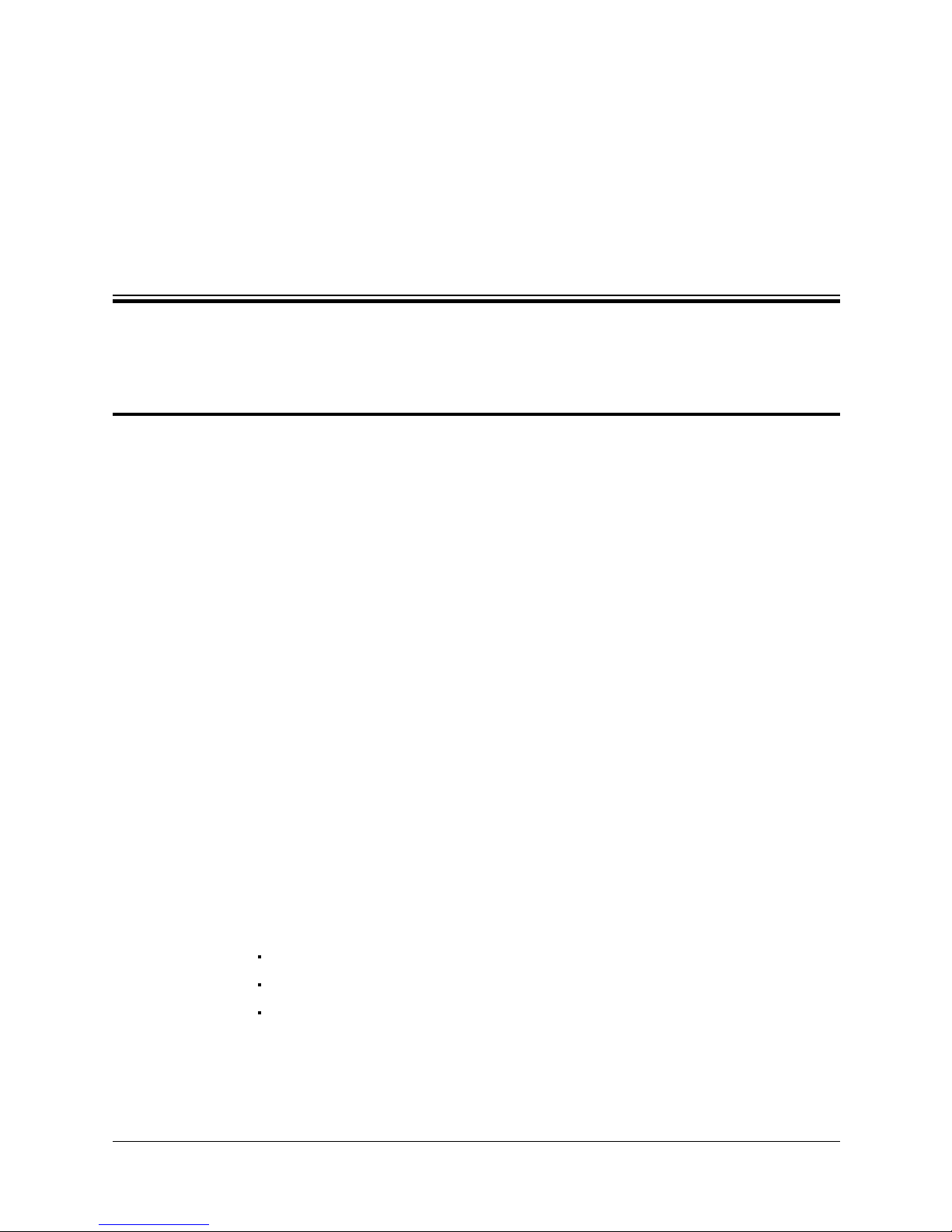
Robot Setup
Refer to Figures 4-1 and 4-2.
1. Set up the SCORA-ER 14 on a sturdy surface with at least 70 cm of free space all
around the robot.
2. Set up the robot so that it
faces in the proper
direction— towards the
application or machine it
will serve.
3. Fasten the base of the robot
to the work surface with
four sets of bolt, washer and
nut.
Make sure the robot is
securely bolted in place.
Otherwise the robot could
become unstable and topple
over while in motion.
Figure 4-1: Robot Safety Range
User’s Manual 4-1 SCORA-ER 14
9603
4. Set up a guardrail or rope
around the SCORA-ER 14
operating area to protect
both the operator and
bystanders.
SCORA-ER 14 Installation
Controller Installation
Perform the installation procedures detailed in the following sections of Chapter
2, “Installation,” in the ACL
Controller-B
Figure 4-2: Robot Base Layout
User’s Manual:
•
Computer/Terminal–Controller Installation
•
Power On
•
Controller Configuration
‹
When the Peripheral Setup screen appears at the end of the controller
configuration, select
after the gripper is installed.) Refer to the section, “Peripheral Devices and
Equipment--Robot Gripper,” in the ACL
Robot Installation
‹
Before you begin, make sure the controller POWER switch is turned off.
Refer to Figures 4-3 and 4-4. Refer also to the wiring information and diagram in
Chapter 8.
1. Connect the safety ground wires:
•
Unscrew and remove the nuts and washers from the safety ground studs on
both the robot and controller connector panels.
•
Connect the green/yellow wires from both the robot cable and the encoders
cable to the safety ground studs on both the robot and controller connector
panels.
Gripper Connection: None
Controller-B
. (You will change this setting
User’s Manual.
SCORA-ER 14 4-2 User’s Manual
9603
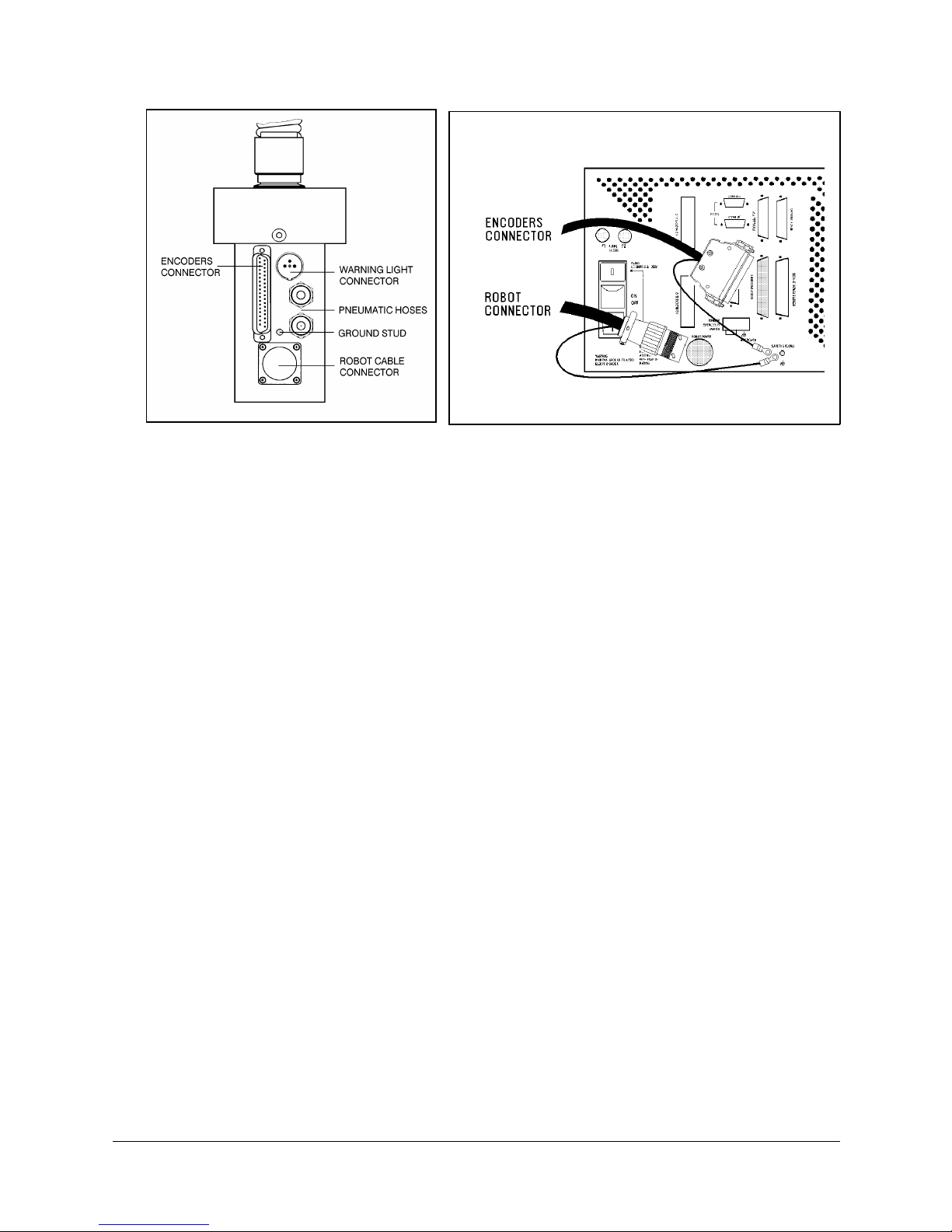
Figure 4-3: Robot Connector Panel
•
After you have placed
Figure 4-4: Controller Connector Panel
the ground wire terminals onto the studs, replace and tighten the washers and
nuts.
2. Connect the two cables which connect the robot and the controller.
•
Plug the the D37 connectors on the encoder cable into the Robot Encoders
port on the controller and into the port on the robot’s connector panel. Tighten
the retaining screws on the connector.
•
Plug the 19-pin round connectors on the robot cable into the Robot Power
port on the controller and into the port on the robot’s connector panel.
3. Connect the robot warning light to the controller:
•
Plug the 3-pin round connector on the warning light cable into the Warning
Light port on the robot. Connect the red and black wires to any unused relay
output terminal: one wire to NO and one wire to C on the same output.
•
Write a routine which will turn on the output whenever the controller is in
CON state and turn off the output whenever the controller is in COFF state.
For automatic activation of this routine, include it in the user-reserved ACL
program BACKG. Refer to the ACL for Controller-B Reference Guide for
more information on BACKG.
Note: When disconnecting the robot from the controller, do it in the opposite order:
•
Disconnect the warning light connections.
•
Disconnect the power cable connections.
•
Disconnect the encoders cable connections.
•
Disconnect the ground wires.
User’s Manual 4-3 SCORA-ER 14
9603

Homing the Robot
After you have completed the robot installation, execute the robot’s Home
routine, as described below.
‹
The robot must be homed before you mount the gripper.
‹
Before you begin the homing procedure, make sure the robot has ample space in
which to move freely and extend its arm.
1. Turn on the controller. Turn on the computer.
2. From the ATS diskette or directory, activate the ATS software. Type:
ats <Enter>
If the controller is connected to computer port COM2, type:
ats /c2
3. When the ATS screen and > prompt appear, you may proceed.
4. Give the ACL command to home the robot. Type:
home <Enter>
The monitor will display:
WAIT!! HOMING...
During the Home procedure, the robot joints move and search for their home
positions in the following sequence: axis 3 (vertical stroke), axis 2, axis 4 (roll)
and axis 1.
If home is found, a message is displayed:
HOMING COMPLETE (ROBOT)
If the HOME process is not completed, an error message identifying the failure is
displayed. For example:
*** HOME FAILURE AXIS 3
If the home switch is found, but not the encoder’s index pulse, the following
message is displayed:
* * * INDEX PULSE NOT FOUND AXIS 2
SCORA-ER 14 4-4 User’s Manual
9603

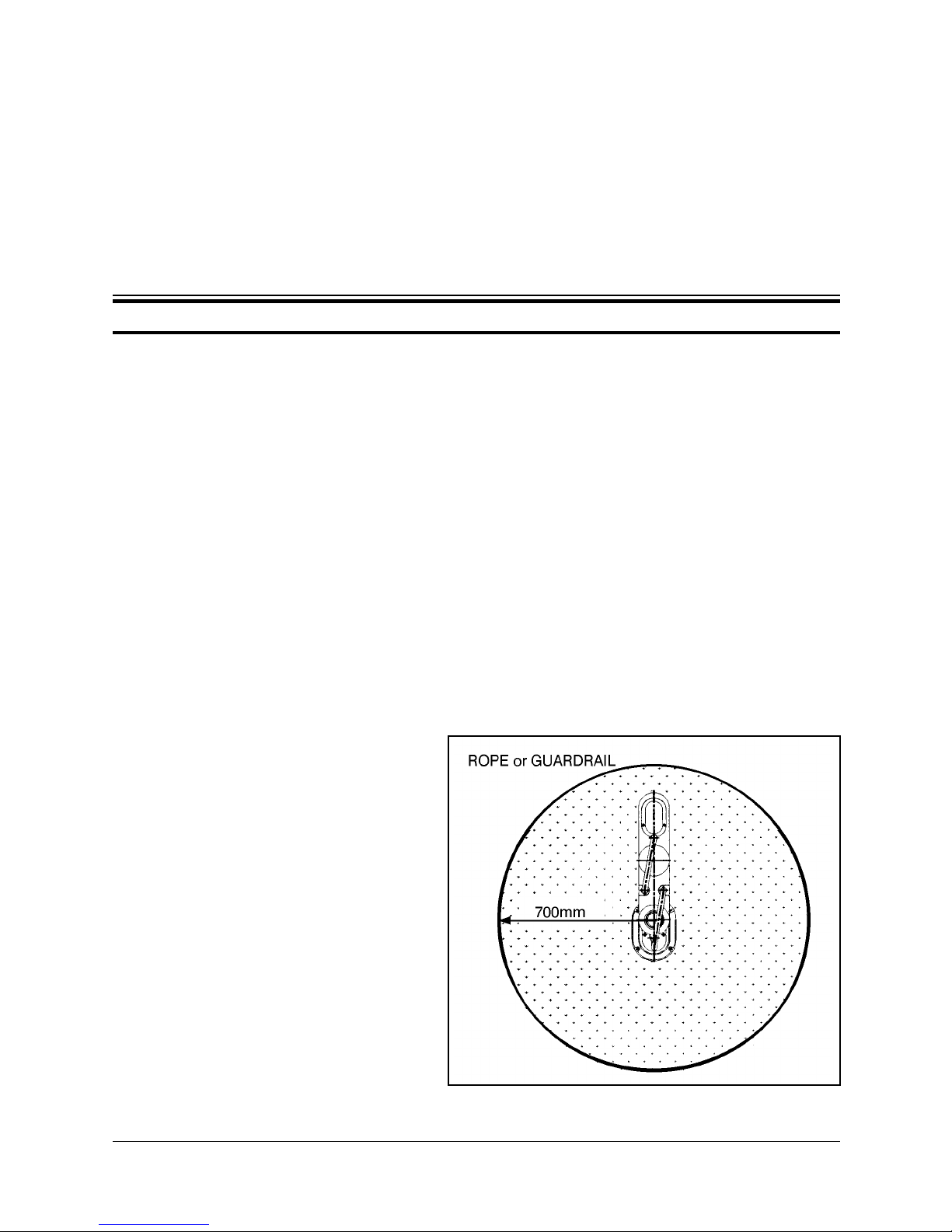
Gripper Installation
The gripper is attached to the flange at the end of the robot arm whose layout is
shown in Figure 4-5.
Pneumatic Gripper
The pneumatic gripper, shown in Figure 4-6,
is controlled by a 5/2 solenoid pneumatic
valve which is activated by one of the
controller’s relay outputs. The valve may be
12VDC or 24VDC and can draw its power
from the controller’s User Power Supply.
‹
The robot must be homed before you mount
the gripper.
1. Using a 3mm hex wrench and six M4x8 socket
screws, attach the gripper to the robot arm
flange.
Figure 4-5: Gripper Mounting
Flange Layout
2. Connect the coiled double hose from
the gripper to the quick coupling on
the underside of Link 2, as indicated
in Figure 4-7.
Figure 4-7: Gripper Connectors
User’s Manual 4-5 SCORA-ER 14
9603
Figure 4-6: Pneumatic Gripper

3. Refer to Figure 4-8.
•
Connect the two
transparent 1/4" O.D.
hoses from the robot to
the CYL ports on the
pneumatic valve.
•
Connect a 5 bar/90 PSI
air supply to the IN port
on the valve.
4. Refer to Figure 4-9.
Connect the valve to the
controller’s User Power
Supply as follows:
•
Connect the black wire
to a common terminal.
•
Connect the red wire to
the normally open (NO)
terminal of any unused
relay output.
Figure 4-8: Pneumatic Solenoid Valve
5. Connect 12VDC or 24VDC
(in accordance with your
valve’s specification) to the
common (C) terminal of the
same relay output, as
shown in Figure 4-9.
6. Attach the valve to the
controller or any other
metalic surface by means of
the valve’s magnetic base.
Figure 4-9: Valve—Controller Connections
SCORA-ER 14 4-6 User’s Manual
9603

Servo Gripper
The electrical servo gripper is shown in the inset in Figure 4-10.
‹
The robot must be homed before you mount the gripper.
1. Using a 3 mm hex wrench and four M4x10 socket screws, attach the gripper to
the gripper mounting flange at the end of the robot arm.
2. Connect the gripper cable to the electrical connector on the robot arm.
Make sure the connector is oriented as shown in Figure 4-10.
3. Make sure the gripper cable is positioned as shown in both Figure 4-10 and
Figure 4-11.
Refer to A-A in Figure 4-10. Fit the two cable clamps onto the two gripper
cables. Place the clamps on the flange. Fit the spacer on the cable clamp screw,
and then tighten the screw onto the flange.
4. Carefully execute the robot HOME command. Stay close to the teach pendant or
controller. If the gripper cable becomes entangled or excessively stretched during
the homing, abort the procedure immediately.
5. The gripper has a rotation of ±270°. Do not attempt to move the gripper beyond
this limit.
6. At the end of each work session (before turning off the controller), or before
homing the robot, make sure the gripper’s position is as shown in Figure 4-11.
Gripper
Mounting
Flange
Figure 4-10: Connecting Gripper to SCORA-ER 14
User’s Manual 4-7 SCORA-ER 14
9603

Figure 4-11: Connecting Gripper to SCORA-ER 14
‹
Axis 5 is reserved by default controller configuration for a servo gripper. To
connect a different device as axis 5, you must change the system configuration by
means of the ACL command CONFIG.
Activating the Gripper
1. Activate ATS. Press <Ctrl>+F3 to activate the Peripheral Setup screen.
2. Change the robot gripper definition according to the gripper you have installed.
Refer to the section, “Peripheral Devices and Equipment--Robot Gripper,” in
Chapter 2 of the ACL
3. Open and close it in order to verify that it is functioning. The following
commands work for both the electric and the pneumatic gripper.
PC Type:
open <Enter>
The gripper opens.
Type:
Controller-B
User’s Manual.
close <Enter>
The gripper closes.
TP Key in:
Open/Close
The Open/Close key toggles the gripper between its open and closed states.
programs you have just written.
SCORA-ER 14 4-8 User’s Manual
9603

CHAPTER
5
Operating Methods
The SCORA-ER 14 robot can be programmed and operated in a number of ways.
Software
ACL
The ACL
through the basic commands for operating and programming the robot.
ACL, Advanced Control Language, is an advanced, multi-tasking robotic
programming language developed by Eshed Robotec. ACL is programmed onto a
set of EPROMs within Controller-B, and can be accessed from any standard
terminal or PC by means of an RS232 communication channel.
ACL features include the following:
Controller-B User’s Manual
Direct user control of robotic axes.
User programming of robotic system.
Input/output data control.
Simultaneous and synchronized program execution
(full multi-tasking support).
Simple file management.
includes two chapters which guide you
ACL Reference Guide for Controller-B
The
examples of the ACL commands and functions.
ATS
ATS, Advanced Terminal Software, is the user interface to the ACL controller.
ATS is supplied on diskette and operates on any PC. The software is a terminal
emulator which enables access to the ACL environment from a PC host computer.
User’s Manual 5 - 1 SCORA-ER 14
9603
provides detailed descriptions and
ACLoff-line
ATS features include the following:
Short-form controller configuration.
Definition of peripheral devices.
Short-cut keys for command entry.
Program editor.
Backup manager.
Print manager.
The ATS Reference Guide for Controller-B is a complete guide to ATS.
ACLoff-line is a preprocessor software utility, which lets you access and use
your own text editor to create and edit ACL programs even when the controller is
not connected or not communicating with your computer.
After communication is established, the Downloader util ity let s you transfer your
program to the controller. The Downloader detects the preprocessor directives,
and replaces them with a string or block of ACL program code.
ACLoff-line also enables activation of ATS, Advanced Terminal Software, for
on-line programming and system operation.
ACLoff-line
SCORBASE
SCORBASE Level 5 is a robot control software package which is supplied on
diskette with the controller. Its menu-driven structure and off-line capabilities
facilitate robotic programming and operation.
SCORBASE runs on any PC system and communicates with ACL, the
controller’s internal language, by means of an RS232 channel.
The SCORBASE Level 5 for Controller-B Reference Guide provides detailed
descriptions and examples of the SCORBASE commands.
Teach Pendant
The teach pendant is a hand-held terminal which is used for controlling the
SCORA-ER 14
for moving the axes, recording positions, sending the axes to recorded positions
and activating programs. Other functions can also be executed from the teach pendant.
The Teach Pendant for Controller-B User’s Manual fully describes the various
elements and functions of the teach pendant.
is described fully in the ACLoff-line User’s Manual.
robot and peripheral equipment. The teach pendant is most practical
SCORA-ER 14 5 - 2 User’s Manual
9603

CHAPTER
Drive System
The SCORA-ER 14 utilizes several different mechanical transmissions for
transferring motion from the motors to the joints.
The structure and operation of the various components used to drive the SCORA
axes are described in this chapter.
‹
Note that the illustrations of
components shown in this
chapter are for descriptive
purposes, and may not be the
actual components used in
the SCORA-ER 14.
ENCODER
MOTOR
6
Axes 1 and 2
The main components of the
drive system for axes 1 and 2
are the motor, the coupling
and the Harmonic Drive gear,
as shown in Figure 6-1.
MOTOR OUTPUT SHAFT
COUPLING
H.D. INPUT SHAFT
HARMONIC DRIVE
GEAR
LIMIT SWITCH
DISK
H.D. OUTPUT
Figure 6-1: Drive System Axes 1 and 2
User’s Manual 6 - 1 SCORA-ER 14
9603

Axis 3
UPPER
Axis 4
The drive system for
axis 3 produces the
linear motion of the
Z-axis. Its main
components are the
motor, pulleys and a
timing belt, and a ball
bearing lead screw with
nut, as shown in Figure
6-2.
The drive system for
axis 4 (Z-roll) produces
the rotation of the end
effector flange. Its main
components are the
motor, a worm gear and
a spline, as shown in
Figure 6-3.
BEARINGS
BEARINGS
NUT
BALL BEARING
LEAD SCREW
ENCODER
MOTOR
PULLEYS & TIMING BELT
END
Figure 6-2: Drive System Axis 3
Figure 6-3: Drive System Axis 4
SCORA-ER 14 6 - 2 User’s Manual
9603

Motors
An electric motor is an actuator—a device which transforms electric power into
mechanical power. The motor converts signals from the controller into rotations
of its shaft.
A robot arm such as the SCORA-ER 14 imposes severe requirements on the
actuators, such as the following:
•
The robot motor must rotate at different speeds, and with a high degree of
accuracy. For example, if the robot is to be used for a spray painting
application, it must be able to accurately follow the defined path at the
specified speed.
•
The robot motor must allow fine speed regulation so that the robot will
accelerate and decelerate as required by the application.
•
The robot motor must supply large torques throughout its speed range and
also when the joint is stationary.
•
The robot motor must be able to stop extremely quickly without overshooting
the target position, and perform rapid changes in direction.
•
Since mounting motors on the robot arm adds to the robot’s weight and
inertia, the robot
motors must be light
and compact, yet
powerful. As shown
in Figure 6-4, the
motors of the
SCORA-ER 14
are
located close to the
axes they drive.
User’s Manual 6 - 3 SCORA-ER 14
9603
Figure 6-4: Motor Locations in SCORA-ER 14

DC Motor Structure
The principles of operation of electrical motors in general, and DC motors in
particular, are based on an electrical current flowing through a conductor situated
within a magnetic field. This situation creates a force which acts on the conductor.
Figure 6-5 shows the basic structure and components of a DC motor comparable
to the structure of the motors used in the SCORA-ER 14. This motor has three main
components:
•
Stator: This is a static component which creates the magnetic field. The
stator may be a permanent magnet, or an electromagnet consisting of a coil
wound around thin iron plates.
•
Rotor: This is the component which rotates within the magnetic field. The
external load is connected to the rotor shaft. The rotor is generally composed
of perforated iron plates, and a conducting wire is wound several times
around the plates and through the perforations. The two ends of the conductor
are connected to the two halves of the commutator, which are connected to
the electric current via the brushes.
•
Brushes: These connect the rotating commutator to the electric current
source.
SCORA-ER 14 6 - 4 User’s Manual
Figure 6-5: Basic Structure of a DC Motor
9603
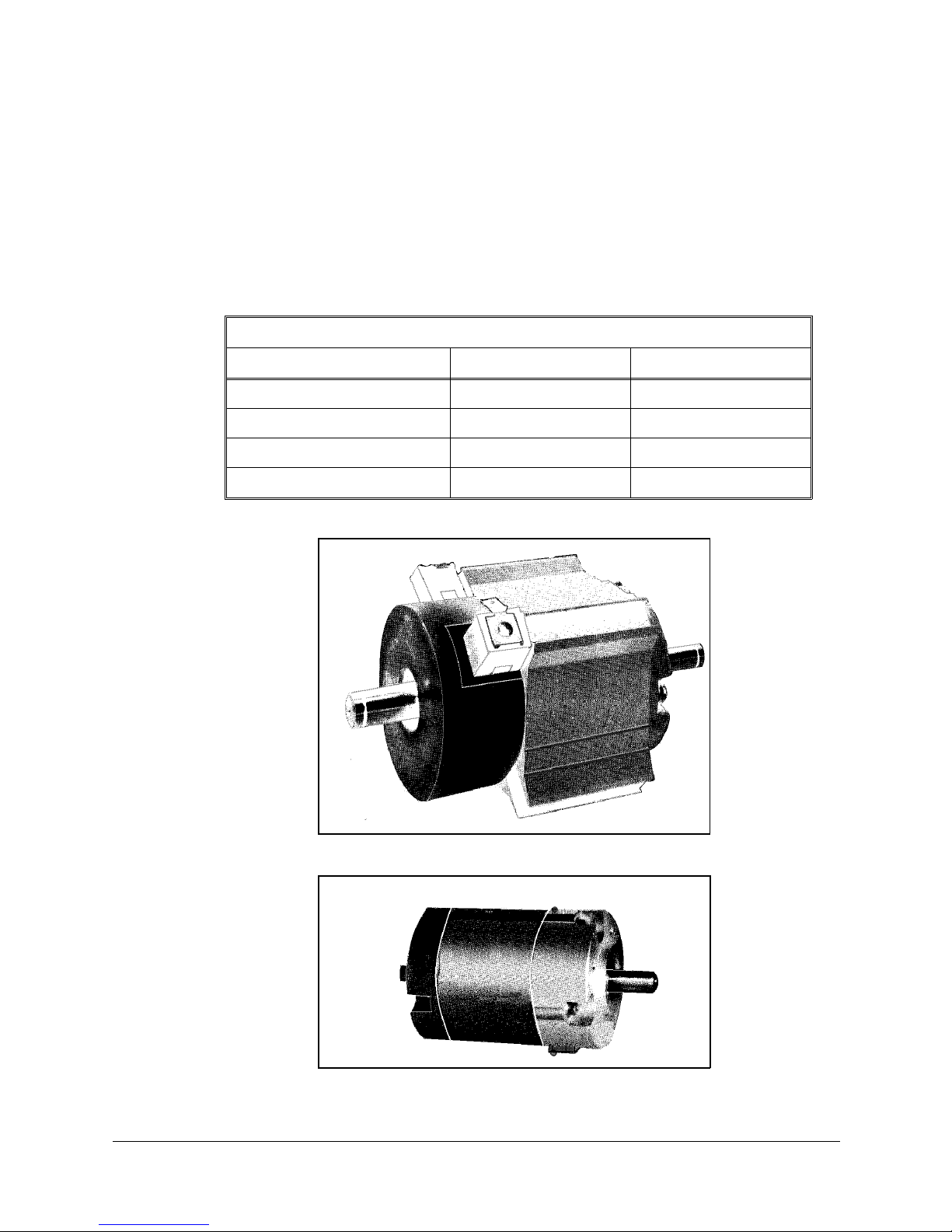
SCORA-ER 14 Motors
The SCORA-ER 14 uses permanent magnet DC motors to drive the axes.
Axes 1 and 2 of the SCORA ER-14 are powered by the motor shown in Figure 6-6.
Axes 3 and 4 are powered by the motor shown in Figure 6-7.
These motors are able to move at extremely high rates of revolution, to move
loads with high torques, and (with encoder attached) to achieve a very high
resolution.
Peak Rated Torque 143 oz.in 27.8 oz.in
Rated Torque 32 oz.in 12.5 oz.in
Maximum Operating Speed 4000 rpm 4500 rpm
Weight 1.29 k / 2.84 lb 0.28 k / 0.62 lb
Motor Specifications
Motor Axes 1 and 2 Motor Axes 3 and 4
User’s Manual 6 - 5 SCORA-ER 14
9603
Figure 6-6: Motor on Axes 1 and 2
Figure 6-7: Motor on Axes 3 and 4

Harmonic Dr ive Gear
The Harmonic Drive transmission used in the SCORA-ER 14, shown in Figure 6-8,
offers a very high gear ratio.
The Harmonic Drive gears used in the SCORA-ER 14 have four main components:
•
Circular spline:
a solid steel ring, with internal gear teeth, usually fixed to the robot link.
•
Wave generator:
a slightly elliptical rigid disk, which is connected to the input shaft, with a ball
bearing mounted on the outer side of the disk.
•
Flexspline:
a flexible, thin-walled cylinder, with external gear teeth, usually connected to
the output shaft.
•
Dynamic spline: a solid steel cylinder, with internal gear teeth.
The external gear teeth on the flexspline are almost the same size as the internal
gear teeth on the circular spline except there are two more teeth on the circular
spline, and the teeth only mesh when the wave generator pushes the flexspline
outwards.
Because the wave generator is elliptical, the flexspline is pushed out in two
places. As the motor rotates the input shaft, the wave generator rotates and the
location of meshing teeth rotates with it. However, because there are two less
teeth on the flexspline, it has to rotate backwards slightly as the wave generator
rotates forwards. For each complete rotation of the input shaft, the flexspline
moves
backwards by
two teeth.
Figures 6-9 and
6-10 show the
different steps in
this process.
SCORA-ER 14 6 - 6 User’s Manual
Figure 6-8: Harmonic Drive Structure
9603

As in all gears, the gear ratio of the Harmonic Drive is the ratio of the input speed
to the output speed. If the number of teeth on the flexspline is Nf, then for every
revolution of the input shaft, the output shaft rotates by 2/Nf of a revolution (that
is, two teeth out of Nf teeth). Hence:
HD gear ratio =
1
2
N
f
f
=
2
N
The Harmonic Drive gear ratio for axis 1 and axis 2 of the SCORA-ER 14 is 160:1
Figure 6-9: Operation of the Harmonic Drive
Figure 6-10: Operation of the Harmonic Drive
User’s Manual 6 - 7 SCORA-ER 14
9603

Pulleys and Timing Belt
The axis 3 transmission contains two pulleys and a timing belt, as illustrated in
Figure 6-11. The input pulley is mounted on the motor output shaft and the output
pulley is connected to the lead screw.
The gear ratio of the belt drive is the ratio of the output pulley to the input pulley,
calculated according to the number of teeth on each pulley.
The belt drive used in the SCORA-ER 14 has a a ratio of 80:21.
Thus, for each rotation (360°) of the
input pulley, the output pulley moves
94°, or approximately one-quarter of
a rotation.
OUTPUT PULLEY
INPUT PULLEY
Figure 6-11: Pulleys and Timing Belt
SCORA-ER 14 6 - 8 User’s Manual
9603

Ball Bearing Screw
A ball bearing lead screw converts the rotation
of the motor to the linear motion of the Z-axis.
In lead screw transmissions, the screw is rotated
by the motor, and the shaft is connected to the
nut, or sleeve, as illustrated in Figure 6-12. In
the SCORA-ER 14 the screw rotates and the nut
travels along the length of the screw.
As shown in Figure 6-13, a ball bearing screw
thread is actually a hardened ball race. The nut
consists of a series of bearing balls circulating in
a similar race. The bearing balls are transferred
from one end of the nut to the other by return
tubes.
The low-friction ball-bearing lead screw
provides more accurate and enduring
performance.
The lead screw used in the SCORA-ER 14 has a
16mm lead. That is, for each rotation of the
screw, the nut travels a linear
distance of 16mm.
The lead screw of the SCORA-ER 14
is fitted with a brake which halts
motion of the Z-axis when motor
power is cut off.
Figure 6-12: Lead Sc re w
Transmission
Figure 6-13: Ball Bearing Screw
User’s Manual 6 - 9 SCORA-ER 14
9603

Worm Gear
A worm gear transmission,
shown in Figure 6-14, is used
in the SCORA-ER 14 to transfer
the rotation of motor 4 to the
rotation of the Z-axis.
The ratio of a worm gear
transmission is defined as:
The worm gear used in the
SCORA-ER 14 has 100 teeth
and the shaft has two starts.
Thus, the worm gear
transmission has a ratio of
50:1.
# teeth on worm gear
# of starts on worm shaft
Figure 6-14: Worm Gear Transmission
Ball Bearing Spline
The SCORA-ER 14 uses a ball bearing spline, shown in Figure 6-15, to transmit
torque from the worm gear to the Z-axis (slider) shaft, while allowing linear
motion of the axis.
Ball bearing splines are similar
to ball bearing screws in that
they both employ the rolling
contact principle of balls
recirculating in a path between
a shaft (spline) and a matching
nut (sleeve). In a ball bearing
spline, however, the path of the
rolling balls in straight, rather
than helical.
Figure 6-15: Ball Bearing Spline
SCORA-ER 14 6 - 10 User’s Manual
9603

Axis Gear Ratios
The overall gear ratio of the output shaft which moves the axis is the product of
the ratios of the transmissions in each drive.
Axes 1 and 2 are driven by Harmonic Drive gears with a gear ratio of 160:1.
Thus, one rotation (360°) of the output shaft of motor 1 or 2 moves the axis 2.25°.
Axis 3 is driven by a belt drive with a ratio of 80:21, and a lead screw which
converts each rotation of the output pulley to a linear movement of 16 mm.
Thus, for each rotation (360°) of motor 3 output shaft, the Z-axis will move a
linear distance of 4.2 mm.
Axis 4 is driven by a worm gear with a ratio of 50:1.
Thus, one rotation (360°) of motor 4 output shaft causes the end effector flange to
rotate 7.2°.
User’s Manual 6 - 11 SCORA-ER 14
9603

Á
SCORA-ER 14 6 - 12 User’s Manual
9603

CHAPTER
Position and Limit Devices
This chapter describes the various elements in the SCORA-ER 14 which play a part
in the positioning of the robot arm and the limiting of its motion.
•
Encoders
•
End of Travel Switches
•
Hard Stops
•
Home Switches
‹
Note that the illustrations of components shown in this chapter are for descriptive
purposes, and may not be the actual components used in the SCORA-ER 14.
7
Encoders
The location and movement of an axis is commonly measured by an
electro-optical encoder attached to the motor which drives the axis. The encoder
translates the rotary motion of the motor shaft into a digital signal understood by
the controller.
Figure 7-1 shows the encoder mounted on a
SCORA-ER 14 motor.
The encoder used on the SCORA-ER 14 contains
a single light emitting diode (LED) as its light
source. Opposite the LED is a light detector
integrated circuit. This IC contains several sets
of photodetectors and the circuitry for producing
a digital signal. A perforated, rotating disk is
located between the emitter and detector IC.
User’s Manual 7 - 1 SCORA-ER 14
9603
Figure 7-1:
SCORA-ER 14 Encoder

As the encoder disk rotates between the
emitter and detectors, the light beam is
interrupted by the pattern of “bars” and
“windows” on the disk, resulting in a
series of pulses received by the
detectors.
The SCORA-ER 14 encoders have 512
slots, as shown in Figure 7-2. An
additional slot on the encoder disk is
used to generate an index pulse
(C-pulse) once for each full rotation of
the disk. This index pulse serves to
determine the home position of the axis.
SCORA-ER 14 Encoder Disk
Figure 7-2:
The photodetectors are arranged so that,
alternately, some detect light while
others do not. The photodiode outputs are then fed through the signal processing
circuitry, resulting in the signals A, A, B, B, I and I, as shown in Figure 7-3.
Comparators receive these signals and produce the final digital outputs for
channels A, B and I. The output of channel A is in quadrature with that of
channel B (90° out of phase), as shown in Figure 7-4. The final output of channel
I is an index pulse.
When the disk rotation is counterclockwise (as viewed from the encoder end of
the motor), channel A will lead channel B. When the disk rotation is clockwise,
channel B will lead channel A.
Figure 7-3: Encoder Circuitry Figure 7-4: Encoder Output Signals
SCORA-ER 14 7 - 2 User’s Manual
9603

Encoder Resolution
From the quadrature signal the SCORA-ER 14 controller measures four counts for
each encoder slot, thus quadrupling the effective resolution of the encoder.
The resolution of the encoder is expressed as:
360°
SE =
Where:
SE is the resolution of the encoder.
n is the number of counts per encoder revolution.
The encoders used in the SCORA-ER 14 have 512 slots, generating 2048 counts
per motor revolution. The encoder resolution is therefore:
SE =
When the encoder resolution is divided by the overall gear ratio of the axis, the
resolution of the joint is obtained.
Since the encoder is mounted on the motor shaft, and turns along with it, the
resolution of the joint is expressed as:
n
360°
2048
= .176°
S
S
JOINT
=
N
E
AXIS
Thus, for example, the resolution of joint 2 of the SCORA-ER 14 is therefore as
follows:
SJ2 =
0.176°
160
= .0011
The resolution is the smallest possible increment which the control system can
identify and theoretically control. The accuracy of the axis—that is, the precision
with which it is positioned—is affected by such factors as backlash, mechanical
flexibility, and control variations.
User’s Manual 7 - 3 SCORA-ER 14
9603

End of Travel (Limit) Switches
The SCORA-ER 14 uses limit switches to
prevent the joints from moving beyond their
functional limits. When a control error fails to
stop the axis at the end of its working range,
the limit switch serves to halt its movement.
The switch is part of an electric circuit within
the robot arm, independent of the robot
controller.
The limit switches used in the SCORA-ER 14
are shown in Figure 7-5.
Axes 1 and 2 each has two limit
switches—one at each end of the axis’
working range.
The limit switches are mounted on a disk
which is attached to the robot’s frame, as
shown in Figure 7-6.
Figure 7-5:
SCORA-ER 14 Limit Switch
The output shaft of the Harmonic Drive moves relative to the microswitch disk.
As the joint moves, a cam on the Harmonic Drive output shaft reaches a point at
which it forces the actuating button of the limit switch into a position which
activates the switch.
Axis 3 has two limit
switches—one at the upper
limit and one at the lower
limit of the axis’ range. The
switches are mounted on the
LIMIT
SWITCH
ACTUATING
BUTTON
LIMIT
SWITCH
bracket alongside the spline
(slider).
CAM
Axis 4 (roll) has no travel
limit switches; it can rotate
endlessly. When a gripper is
attached to axis 4, its
movements are controlled
and limited by means of
software only (encoder).
LIMIT SWITCH
DISK
HARMONIC DRIVE
SCORA-ER 14 7 - 4 User’s Manual
Figure 7-6: Limit Switch Activation
9603

As shown in Figure 7-7A, when limit switch 1 is activated (that is, when the
button is depressed), the relay contact opens and the relay is deenergized. The
motor cannot move the joint
beyond this point. The diode
allows the motor to reverse
direction, thus permitting the
joint to move away from the
limit switch.
When the limit switch is
activated, it causes a control
error, resulting in the activation
A
of COFF, and an impact
protection message.
CON must be activated and the
robot arm must be manually
moved (using keyboard or teach
pendant) away from the impact
condition.
As long as the axis has not
reached one of its limits, the
relay contact remains closed,
and the diode has no effect on
B
the circuit, as shown in Figure
7-7B. Current can flow in either
direction; the motor is thus able
to rotate in either direction.
Figure 7-7: Axis Limit Circuit
Hard Stops
When the software limits and/or the end of travel switches fail to halt the
movement of the robot arm, it is possible that the momentum of the robot arm
will drive it until it reaches its mechanical limit.
When the joint reaches this hard stop, the impact protection and thermic
protection processes detect an error, thus activating COFF.
CON must be activated and the robot arm must be manually moved away from
the impact condition.
User’s Manual 7 - 5 SCORA-ER 14
9603

Home Switches
The SCORA-ER 14 uses an optical home switch on each axis to identify the fixed
reference, or home, position.
For axes 1 and 2 the home switch is mounted on the same disk as the end of travel
switches, and a “flag” is attached to the Harmonic Drive output shaft, as shown
in Figure 7-8.
The home switch for axis 3 is located near the top of the bracket alongside the
spline (slider), just below the axis’ upper limit switch.
The home switch for axis 4 is located within the worm gear housing.
During the homing procedure, the robot joints are moved, one at a time. Each axis
is moved until the flag cuts the beam of light. When that occurs, the optical
detector on each joint sends a specific signal to the controller.
Once the home switch location has been detected, the axis motor continues to
rotate until its encoder produces an index pulse. The point at which that occurs is
the axis home position.
OPTICAL
HOME
FLAG
AXIS NOT AT HOME
Figure 7-8: Home Switch Activation
LIMIT
SWITCH
OPTICAL
HOME
HARMONIC DRIVE
LIMIT
SWITCH
FLAG
AXIS AT HOME
SCORA-ER 14 7 - 6 User’s Manual
9603

CHAPTER
Wiring
Figure 8-1 is a schematic diagram of the SCORA-ER 14 cable connections.
8
Figure 8-1: SCORA-ER 14 Cabling
The power (robot) cable, encoder cable and warning light cable connect the
Controller-B to the connector panel of the SCORA-ER 14 robot. Safety ground
wires from the robot and the encoder cables are connected to safety ground studs
on the connector panel and on the controller back panel.
The robot cable supplies power to the motors and +24VDC to the printed circuit
board (PCB) located in link 1. The encoder cable carries information from the
encoders and the home switches to the controller, and the warning light cable
controls the warning light.
A wire braid links the connectors on the panel to the PCB, located in Link 1. A
second braid connects the elements in axes 3 – 5 (motors, encoders, limit and
home switches, brake) to the PCB.
User’s Manual 8 - 1 SCORA-ER 14
9603

Power (Robot) Cable and Connector
The power (robot) cable, which connects
the controller to the robot motors, contains
12 leads in 6 pairs.
Figure 8-2 shows the Burndy 19 pin female
connector that joins the power cable to the
connector panel at the base of the robot.
The following table describes the connector
pin functions and the cable wiring.
Robot (Power) Cable and Connector
Figure 8-2. Burndy 19 Pin Connector
Pin
ID
A Motor 1 –
M Motor 1 + brown M0_B
C Motor 2 –
L Motor 2 + red M1_B
E Motor 3 –
H Motor 3 + blue M2_B
B Motor 4 –
K Motor 4 + yellow M3_B
D Motor 5 –
J Motor 5 + green M4_B
R+24V to PCB
S 24VRET to PCB black 24VRET
Pin Description
Robot Side (J1)
Wire Type and Color
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
black M0_A
black M1_A
black M2_A
black M3_A
black M4_A
white +24V
Pin Description
Controller Side
(P1)
SCORA-ER 14 8 - 2 User’s Manual
9603

Encoder Cable and Conenctor
The encoder cable, which connects the controller
to the motor encoders and optical home switches,
contains 38 leads in 19 pairs. Only 14 pairs are
used.
Figure 8-3 shows the D37 female connector that
joins the encoder cable to the connector panel at
the base of the robot.
The following table details the connector pin
functions and the decribes the cable wiring.
Encoder Cable and Connector
Figure 8-3. D37 Connector
Pin
ID
1+5V –
2+5V – black +5V
5 A1(Encoder Pulse A)
6 B1(E n c o d er P u l s e B ) black CHB 0
7 C1(Encoder Index Pulse)
8 COMMON 1 red COMMON 0
31 H1 (Home)
9 A2 (Encoder Pulse A)
10 B2 (Encoder Pulse B) white CHB 1
11 C2 (Encoder Index Pulse)
12 COMMON 2 blue COMMON 1
32 H2 (Home)
13 A3 (Encoder Pulse A)
14 B3 (Encoder Pulse B) black CHB 2
15 C3 (Encoder Index Pulse)
16 COMMON 3 red COMMON 2
33 H3 (Home)
Pin Description
Robot Side (J4)
Axis Wire Type and Color
Twisted
Pair
Twisted
Pair
1
2
3
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
red +5V
brown CHA 0
brown CHC 0
white MSWITCH 0
with J2 – 32
red CHA 1
red CHC 1
black MSWITCH 1
with J2 – 31
orange CHA 2
orange CHC 2
blue MSWITCH 2
with J2 – 34
Pin Description
Controller Side
(J2)
User’s Manual 8 - 3 SCORA-ER 14
9603

Encoder Cable and Connector
Pin
ID
17 A4 (Encoder Pulse A)
18 B4 (Encoder Pulse B) black CHB 3
19 C4 (Encoder Index Pulse)
20 COMMON 4 red COMMON 3
34 H4 (Home)
21 A5 (Encoder Pulse A)
22 B5 (Encoder Pulse B) black CHB 4
23 C5 (Encoder Index Pulse)
24 COMMON 5 red COMMON4
35 H5 (Home)
Pin Description
Robot Side (J4)
Axis Wire Type and Color
Twisted
Pair
4
5
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
Twisted
Pair
yellow CHA 3
yellow CHC 3
black MSWITCH3
with J2 – 33
green CHA 4
green CHC 4
green MSWITCH4
with free yellow
Pin Description
Controller Side
(J2)
Warning Light Cable and Connector
The warning light cable which connects the
controller to the warning light contains three leads.
Figure 8-4 shows the Amphenol three pin female
connector that joins the warning light cable to the
panel at the base of the robot.
The following table details the warning light cable
and connector.
Warning Light Cable and Connector
Pin
#
1NO redNO
2 COM black COM
Pin Description
Robot Side (J3)
Wire
Color
Figure 8-4. Amphenol 3 Pin
Connector
Pin Description
Controller Side
SCORA-ER 14 8 - 4 User’s Manual
9603

The maintenance and inspection procedures recommended below will ensure the
best possible performance of the robot over an extended period.
Daily Operation
At the start of each working session, check the robot and controller, in the
following order:
1. Before you power on the system, check the following items:
•
The installation meets all safety standards.
•
All cables are properly and securely connected.
Cable connector screws are fastened.
Maintenance
CHAPTER
8
•
The gripper is properly connected.
The air supply (for a pneumatic gripper) is functioning properly.
•
Any peripheral devices or accesssories which will be used, such as the teach
pendant or a remote emergency button, are properly connected to the
controller.
2. After you have powered on the system, check the following items:
•
No unusual noises are heard.
•
No unusual vibrations are observed in any of the robot axes.
•
There are no obstacles in the robot’s working range.
3. Bring the robot to a position near home, and activate the Home procedure. Check
the following items:
•
Robot movement is normal.
•
No unusual noise is heard when robot arm moves.
•
Robot reaches home position in every axis.
User’s Manual 9 - 1 SCORA-ER 14
9603

Periodic Inspection
The following inspections should be performed regularly:
•
Check robot mounting bolts for looseness using a wrench. Retighten as
needed.
•
Check all visible bolts and screws for looseness using a wrench and
screwdriver. Retighten as needed.
•
Check cables. Replace if any damage is evident.
The following robot components may require replacing after prolonged use of the
robotic arm causes them to wear or fail:
DC Servo Motors
Motor Brushes
Timing Belts
V-Rings
Harmonic Drives
Cross-Roller Bearings
Troubleshooting
Whenever you encounter a problem with your system, try to pinpoint its source
by exchanging the suspected faulty component—for example, robot, controller,
teach pendant, cable—with one from a functioning system.
In general, when trying to determine the source of a malfunction, first check the
power source and external hardware, such as controller switches, LEDs and cable
connections. Then check fuses; you may also open the controller to check
components, according to the procedures and instructions detailed in the
Controller-B User’s Manual.
In addition, make sure the controller is properly configured for the robot and
gripper, the software commands have been correctly issued, and system
parameters are properly set.
All troubleshooting procedures described in the section can be performed by the
user.
‹
Do not attempt to open the robot arm. There are no user-serviceable parts inside.
If you are unable to determine and/or correct the problem, contact your service
representative. Only qualified technicians may remove and/or replace robot
components.
SCORA-ER 14 9 - 2 User’s Manual
9603

1. Controller’s MOTORS switch does not turn on; the green LED does not light.
•
Make sure the Emergency button is released.
•
Turn off the controller, disconnect it from the power source, and open the
cover.
•
Check the 0.5A (SB) fuse (marked FAN/POWER/RELAYS)
2. Controller functioning, but the robot cannot be activated.
•
Make sure an obstacle is not blocking the robot.
•
Make sure the controller’s MOTORS switch is on and the green LED is lit.
•
Make sure the controller is in the control off (COFF) state. Then activate the
control on (CON) state from PC or TP.
•
Make sure all robot and encoder cables are properly connected.
•
Check driver card fuses. Each driver card has a pair of LEDs and a pair of
fuses (accessible from controller back panel). The upper LED and fuse
correspond to the axis number at the top of the card; the lower LED and fuse
correspond to the axis number at the bottom of the card.
Both LEDs on each card in use should be lit, indicating that power is being
supplied to the axis driver. If one of the LEDs is not lit, remove the fuse for
the corresponding axis and examine it. (To remove the fuse, press it in and
rotate counter-clockwise.)
3. Robot does not find Home position in one or all of the axes.
•
Make sure the homing command was properly issued.
•
Make sure all robot and encoder cables are properly connected.
•
If the robot has just undergone maintenance or repair, use the command
ZSET. Then issue the home command.
•
Make sure system homing parameters have not been erased.
Make sure system homing parameters are properly set.
Refer to the ACL Reference Guide.
•
Check whether the optical home switch for this axis is functioning.
Manually move the faulty axis (from teach pendant or keyboard) and check
the value of system variable HS[n] (where n is the index of the axis). The
value of HS will change to either 1 or 0 (defined by parameter 560+axis)
when the home switch is detected.
To help you perform this test, prepare and continuously run a simple ACL
program, as follows:
User’s Manual 9 - 3 SCORA-ER 14
9603

LABEL 1
PRINTLN HS[
n
]
DELAY 20
GOTO 1
If the value of HS does not change, possible causes:
Faulty arm circuitry.
Faulty optical switch; optical switch not properly mounted.
Faulty driver circuitry
Problem in controller power supply unit +5V1.
4. One of the axes does not function.
•
Check the driver card LED for this axis at the back of the controller. If the
LED is not lit, check the corresponding fuse.
•
Check the motor drive circuitry.
•
Check the encoder:
Enter the command SHOW ENCO to display the encoder readings.
Enter the command COFF (to disable servo control) and then physically move
the axis in question in both directions.
The encoder reading should rise for rotation in one direction and fall for
rotation in the opposite direction. If this does not occur, there is a problem in
the encoder or its circuitry.
If the encoder readings do not change, check whether the encoder connector is
properly connected to the rear controller panel.
The problem may be caused by faulty encoder connectors on the robot’s
internal PCB’s.
5. Motors suddenly stop. No message on screen. No response to keyboard entries.
•
Check the power source.
•
Make sure the MOTORS power switch is on; make sure the Emergency
button is not depressed.
•
Turn off the controller and open up the cover. Turn on the controller.
Check the yellow “watchdog” LED on the main board. If it is lit, it indicates
that that one of the following fuses on the power supply unit has blown out:
+12VA, –12VA, +12VDR, –12VDR.
Turn off the controller and disconnect it from the power source. Check each
of these four fuses. Replace the blown fuse.
SCORA-ER 14 9 - 4 User’s Manual
9603

6. Errors in the repeatability of the robot.
•
Try to identify the faulty axis. If many or all axes are faulty, look for an
electrical noise source in your environment.
•
Check the controller’s ground and the robot’s ground connection to the safety
ground terminal at the back of the controller.
•
Check the encoder.
Bring the robot to a starting position. Using a pencil, draw a fine, continuous
line on the robot which crosses from the cover of one link to the cover of the
adjacent link at the joint in question.
Enter the command SHOW ENCO to display the encoder readings.
Enter the command COFF (to disable servo control) and then physically move
the axis to another position. Then return to the starting position marked by the
line you drew. Check the encoder reading for the axis again. It should be
within 5 counts of the previous reading; if not, the encoder needs to be
replaced.
7. Unusual noise.
•
Loose screws.
•
Poor lubrication.
•
Ratcheting.
•
Worn motor brushes.
•
Worn timing belt.
•
Damaged harmonic drive.
8. Unusual smell.
•
A motor has burnt out and needs to be replaced.
9. Axis/axes vibrating, too weak to carry load, motion not smooth, or jerks during or
at end of motion.
•
System parameters are not properly adjusted.
Refer to the ACL Reference Guide.
•
Problem in axis driver card(s) in the controller.
Refer to the Controller-B User’s Manual.
User’s Manual 9 - 5 SCORA-ER 14
9603

10. Pneumatic gripper does not respond.
•
•
•
Messages
Following is a alphabetical listing of system messages which indicate a problem
or error in the operation of the robot arm. Refer to the ACL Reference Guide for
additional error messages.
Axis disabled.
Check that all air hoses are connected properly.
Make sure the gripper is connected to the proper controller output.
Check the relay output to which the gripper is connected.
Check whether the relays have been switched (LED is lit):
In output OFF, NC is shorted to COM, NO is disconnected from COM.
In output ON, NO is shorted to COM, NC is disconnected from COM.
If outputs have not been switched, check the flat cable in the controller
connecting the main board (J17) and the I/O card.
(1) A movement command could not be executed because servo control of the
arm has been disabled (COFF).
(2) A previous movement of the arm resulted in an Impact or Trajectory error,
thereby activating COFF and disabling the arm.
Check the movements of the robot, and correct the command(s).
CONTROL DISABLED.
Motors have been disconnected from servo control. Possible causes:
(1) COFF (control off) command was issued.
(2) CON (control on) has not been issued; the motors have not been activated.
(3) A previous error (such as Impact Protection, Thermic Overload or
Trajectory Error) activated COFF, thereby disabling the arm.
*** HOME FAILURE AXIS n.
The homing procedure failed for the specified axis. Possible causes:
(1) The home microswitch was not found.
(2) The motor power supply is switched off.
(3) Hardware fault on this axis.
Home on group/axis not done.
You attempted to move the arm to a recorded positions, or to record a
position, before homing was performed on the group or axis.
SCORA-ER 14 9 - 6 User’s Manual
9603

*** IMPACT PROTECTION axis
n
The controller has detected a position error which is too large. The system
aborted all movements of that axis group, and disabled all axes of t hat group. The
user routine CRASH, if it exists, has been executed. Possible causes:
(1) An obstacle prevented the movement of the arm.
(2) An axis driver fuse has blown.
(3) The motor power switch is turned off.
(4) An encoder fault.
(5) A mechanical fault.
(6) The axis is not connected.
Determine and correct the cause of the position error. Then reenable servo
control of the motors (CON), and restart the program.
INDEX pulse not found
axis n
The index pulse of the encoder was not found during the homing of the
specified axis. Possible causes:
(1) The distance between the index pulse and the home switch transition
position has changed, due to a mechanical fault on the axis or a maintenance
procedure (such as replacement of the motor, motor belt, encoder, or gear).
Enter the command ZSET. Then retry homing.
(2) Index pulse faulty.
Check the encoder and wiring.
*** LOWER LIMIT AXIS
n.
During keyboard or TP manual movement of the specified axis, its encoder
attained its minimum allowed value.
Move the axis in the opposite direction.
Motor power switch is OFF.
Be sure the controller’s MOTORS switch is on. Activate CON. Then repeat
the motor or movement command.
No hard homing axis n.
The specified axis has not been configured for hard homing.
Use the HOME command (instead of HHOME). OR
Check the type of homing suitable for that axis. If necessary, change the
system parameters to allow hard homing of the axis.
No homing.
The h o m i n g p a r ame t e rs f o r t h e axi s (PAR 460+axis and PAR 600+axis) are set
to 0; as a result, the homing procedure will not be performed on the axi s.
User’s Manual 9 - 7 SCORA-ER 14
9603

*** OUT OF RANGE axis
n
An attempt was made to record a position (HERE, HEREC, etc. ) while the
robot arm was out of its working envelope.
Manually move the arm to a location within its working envelope. Then
repeat the command.
*** THERMIC OVERLOAD axis
n
Through a software simulation of motor temperature, the system has detected
a dangerous condition for that motor. The system aborted all movements of
that axis group, and disabled all axes of that group. The user routine CRASH,
if it exists, has been executed. Possible causes:
(1) The arm attempted to reach a position, which could not be reached due to
an obstacle (for example, a position defined as being above a table, but
actually slightly below the table’s surface). The impact protection is not
activated because the obstacle is close to the target position. However,
integral feedback will increase the motor current and the motor will overheat,
subsequently causing the Thermic Protection to be activated.
(2) An axis driver is faulty or its fuse has blown.
(3) The robot arm is near to the target position, but does not succeed in
reaching it, due to a driver fault. The software will then detect an abnormal
situation.
(4) The Thermic Protection parameters are improperly set, or have been
corrupted by improper loading of parameters.
Check the positions, the axis driver card and parameters. Reenable servo
control of the motors ( CON ).
*** TOO LARGE SPEED axis n.
Possible causes:
(1) The controller has detected a movement which is too fast; that is, the
required displacement of the encoder, as calculated from the speed limit
parameter, PAR 180+axis, is too great.
(2) Since the trajectory is not calculated prior to a linear or circular
movement, the linear or circular movement may cause one of the joints to
move too fast.
Lower the value of speed for that movement.
SCORA-ER 14 9 - 8 User’s Manual
9603

*** TRAJECTORY ERROR !
During movement, the robot arm reached its envelope limits, and the system
aborted the movement. This may occur when executing the following types of
movements: linear (MOVEL), circular (MOVEC) , MOVES, and SPLINE.
Since the trajectory is not computed prior to motion, the movement may
exceed the limits of the working envelope.
Modify the coordinate values of the positions which define the trajectory.
*** UPPER LIMIT AXIS
n
During keyboard or TP manual movement of the specified axis, its encoder
attained its maximum allowed value.
Move the axis in the opposite direction.
User’s Manual 9 - 9 SCORA-ER 14
9603

 Loading...
Loading...