

December 1990 Order Number: 271029-005
M80287
80-BIT HMOS*
NUMERIC PROCESSOR EXTENSION
Military
Y
High Performance 80-Bit Internal
Architecture
Y
Implements Proposed IEEE Floating
Point Standard 754
Y
Expands M80286/10 Datatypes to
Include 32-, 64-, 80-Bit Floating Point,
32-, 64-Bit Integers and 18-Digit BCD
Operands
Y
Object Code Compatible with M8087
Y
Built-In Exception Handling
Y
Operates in Both Real and Protected
Mode M80286 Systems
Y
Available in a 40-Pin Cerdip Package
Y
Protected Mode Operation Completely
Conforms to the M80286 Memory
Management and Protection
Mechanisms
Y
Directly Extends M80286/10 Instruction
Set to Trigonometric, Logarithmic,
Exponential and Arithmetic Instructions
for All Datatypes
Y
8 x 80-Bit, Individually Addressable,
Numeric Register Stack
Y
6, 8, 10 MHz
Y
Military Temperature Range:
b
55§Ctoa125§C(TC)
The Intel M80287 is a high performance numerics processor extension that extends the M80286/10 architecture with floating point, extended integer and BCD data types. The M80286/20 computing system (M80286
and M80287) fully conforms to the proposed IEEE Floating Point Standard. Using a numerics oriented architecture, the M80287 adds over fifty mnemonics to the M80286/20 instruction set, making the M80286/20 a
complete solution for high performance numeric processing. The M80287 is implemented in N-channel, depletion load, silicon gate technology (HMOS) and packaged in a 40-pin ceramic package. The M80286/20 is
object code compatible with the M80286/20 and M8088/20. Intel’s HMOS III process provides superior
radiation tolerance for applications with stringent radiation requirements.
*HMOS is a patented process of Intel Corporation.
271029–1
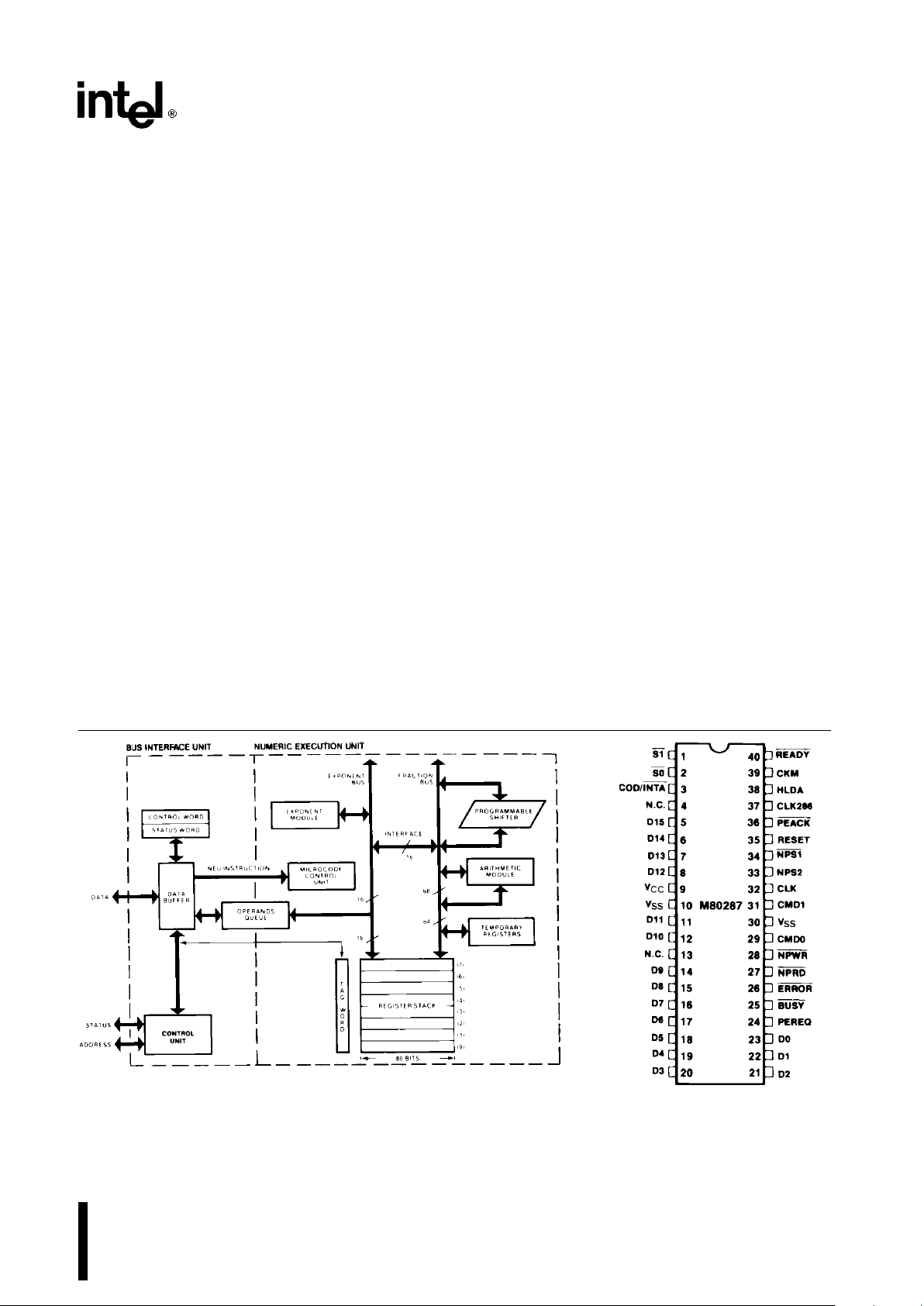
Figure 1. M80287 Block Diagram 271029–2
NOTE:
N.C. pins must not be connected.
Figure 2. M80287 Pin
Configuration
M80287
Table 1. M80287 Pin Description
Symbol Type Name and Function
CLK I CLOCK INPUT: This clock provides the basic timing for internal M80287
operations. Special MOS level inputs are required. The M82284 or M8284A
CLK outputs are compatible to this input.
CKM I CLOCK MODE SIGNAL: Indicates whether CLK input is to be divided by 3
or used directly. A HIGH input will select the latter option. This input may be
connected to V
CC
or VSSas appropriate. This input must be either HIGH or
LOW 20 CLK cycles before RESET goes LOW.
RESET I SYSTEM RESET: Causes the M80287 to immediately terminate its present
activity and enter a dormant state. RESET is required to be HIGH for more
than 4 M80287 CLK cycles. For proper initialization the HIGH-LOW
transition must occur no sooner than 50 ms after V
CC
and CLK meet their
D.C. and A.C. specifications.
D15– D0 I/O DATA: 16-bit bidirectional data bus. Inputs to these pins may be applied
asynchronous to the M80287 clock.
BUSY O BUSY STATUS: Asserted by the M80287 to indicate that it is currently
executing a command.
ERROR O ERROR STATUS: Reflects the ES bit of the status word. This signal
indicates that an unmasked error condition exists.
PEREQ O PROCESSOR EXTENSION DATA CHANNEL OPERAND TRANSFER
REQUEST: A HIGH on this output indicates that the M80287 is ready to
transfer data. PEREQ will be disabled upon assertion of PEACK or upon
actual data transfer, whichever occurs first, if no more transfers are required.
PEACK I PROCESSOR EXTENSION DATA CHANNEL OPERAND TRANSFER
ACKNOWLEDGE: Acknowledges that the request signal (PEREQ) has been
recognized. Will cause the request (PEREQ) to be withdrawn in case there
are no more transfers required. PEACK
may be asynchronous to the
M80287 clock.
NPRD I NUMERIC PROCESSOR READ: Enables transfer of data from the M80287.
This input may be asynchronous to the M80287 clock.
NPWR I NUMERIC PROCESSOR WRITE: Enables transfer of data to the M80287.
This input may be asynchronous to the M80287 clock.
NPS1, NPS2 I NUMERIC PROCESSOR SELECTS: Indicates the CPU is performing an
ESCAPE instruction. Concurrent assertion of these signals (i.e., NPS1
is
LOW and NPS2 is HIGH) enables the M80287 to perform floating point
instructions. No data transfers involving the M80287 will occur unless the
device is selected via these lines. These inputs may be asynchronous to the
M80287 clock.
CMD1, CMD0 I COMMAND LINES: These, along with select inputs, allow the CPU to direct
the operation of the M80287. No actions will occur if these signals are both
HIGH. These inputs may be asynchronous to the M80287 clock.
CLK286 I CPU CLOCK: This input provides a sampling edge for the M80287 inputs
S1
,S0, COD/INTA, READY, and HLDA. It must be connected to the
M80286 CLK input.
S1,S0 I STATUS: These inputs allow the M80287 to monitor the execution of
COD/INTA
ESCAPE instructions by the M80286. They must be connected to the
corresponding M80286 pins.
HLDA I HOLD ACKNOWLEDGE: This input informs the M80287 when the M80286
controls the local bus. It must be connected to the M80286 HLDA output.
READY I READY: The end of a bus cycle is signaled by this input. It must be
connected to the M80286 READY input.
V
SS
I GROUND: System ground, both pins must be connected to ground.
V
CC
I POWER:a5V supply.
2
M80287
FUNCTIONAL DESCRIPTION
The M80287 Numeric Processor Extension (NPX)
provides arithmetic instructions for a variety of numeric data types in M80286/20 systems. It also executes numerous built-in transcendental functions
(e.g., tangent and log functions). The M80287 executes instructions in parallel with an M80286. It effectively extends the register and instruction set of
an M80286/10 system for existing M80286 data
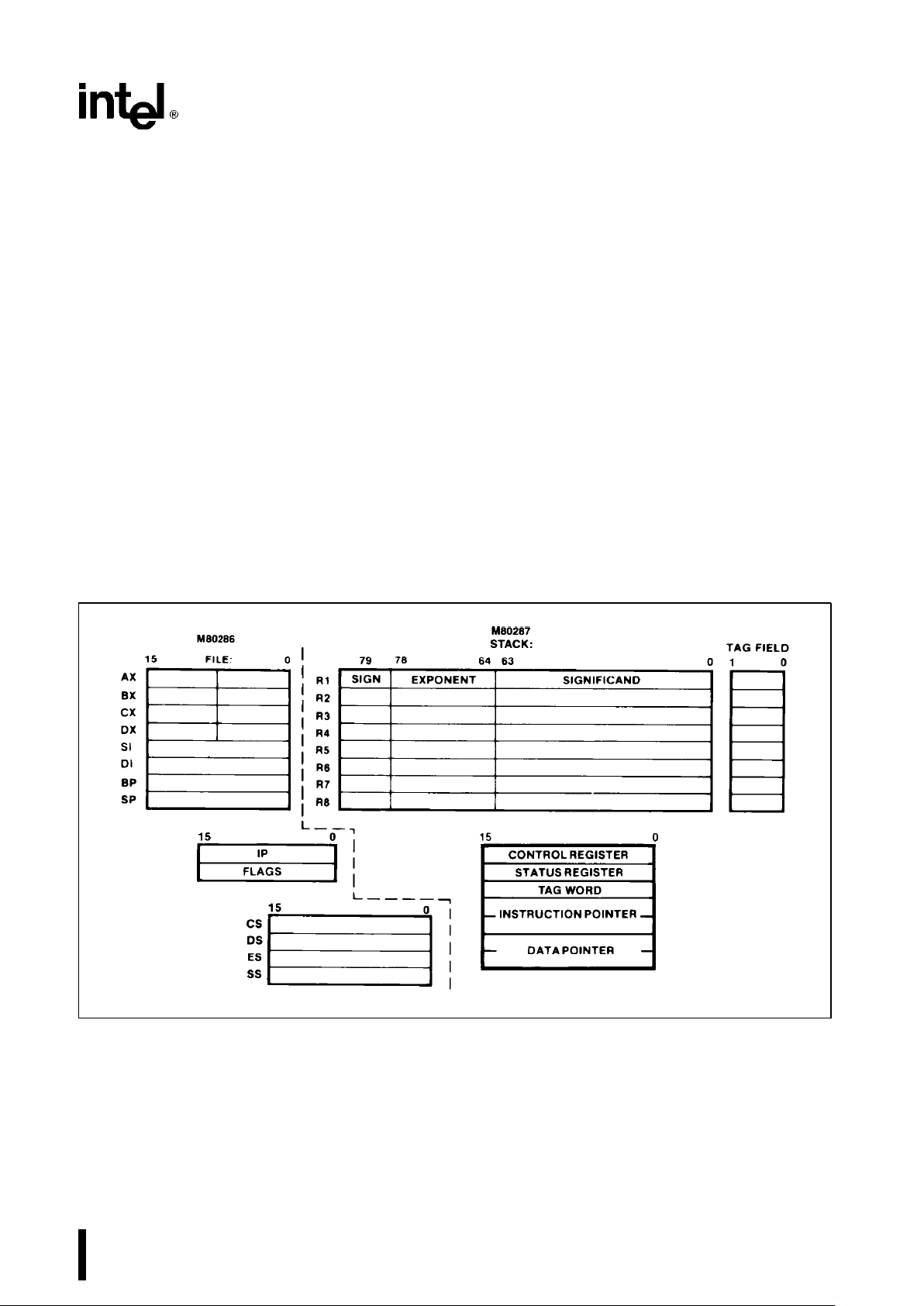
types and adds several new data types as well. Figure 3 presents the program visible register model of
the M80286/20. Essentially, the M80287 can be
treated as an additional resource or an extension to
the M80286/10 that can be used as a single unified
system, the M80286/20.
The M80287 has two operating modes similar to the
two modes of the M80286. when reset, M80287 is in
the real address mode. It can be placed in the protected virtual address mode by executing the
SETPM ESC instruction. The M80287 cannot be
switched back to the real address mode except by
reset. In the real address mode, the M80286/20 is
completely software compatible with M8086, 88/20.
Once in protected mode, all references to memory
for numerics data or status information, obey the
M80286 memory management and protection rules
giving a fully protected extension of the M80286
CPU. In the protected mode, M80286/20 numerics
software is also completely compatible with
M8086/20 and M8088/20.
The M80287 has two operating modes similar to the
two modes of the M80286. When reset, M80287 is
in the real address mode. It can be placed in the
protected virtual address mode by executing the
SETPM ESC instruction. The M80287 cannot be
switched back to the real address mode except by
reset. In the real address mode, the
M80286/M80287 is completely software compatible
with M8086/M8087 and M8088/M8087.
Once in protected mode, all references to memory
for numerics data or status information, obey the
M80286 memory management and protection rules
giving a fully protected extension of the M80286
CPU. In the protected mode, M80286/M80287 numerics software is also completely compatible with
M8086/M8087 and M8088/M8087.
271029–3
Figure 3. M80286/20 Architecture
3
M80287
ABSOLUTE MAXIMUM RATINGS*
Storage Temperature under Biasb65§Ctoa150§C
Case Temperature АААААААААААААb55§Ctoa125§C
Voltage on any Pin with
Respect to Ground ААААААААААААААА
b
1.0 toa7V
Power Dissipation ААААААААААААААААААААААА3.0 Watt
NOTICE: This is a production data sheet. The specifications are subject to change without notice.
*
WARNING: Stressing the device beyond the ‘‘Absolute
Maximum Ratings’’ may cause permanent damage.
These are stress ratings only. Operation beyond the
‘‘Operating Conditions’’ is not recommended and extended exposure beyond the ‘‘Operating Conditions’’
may affect device reliability.
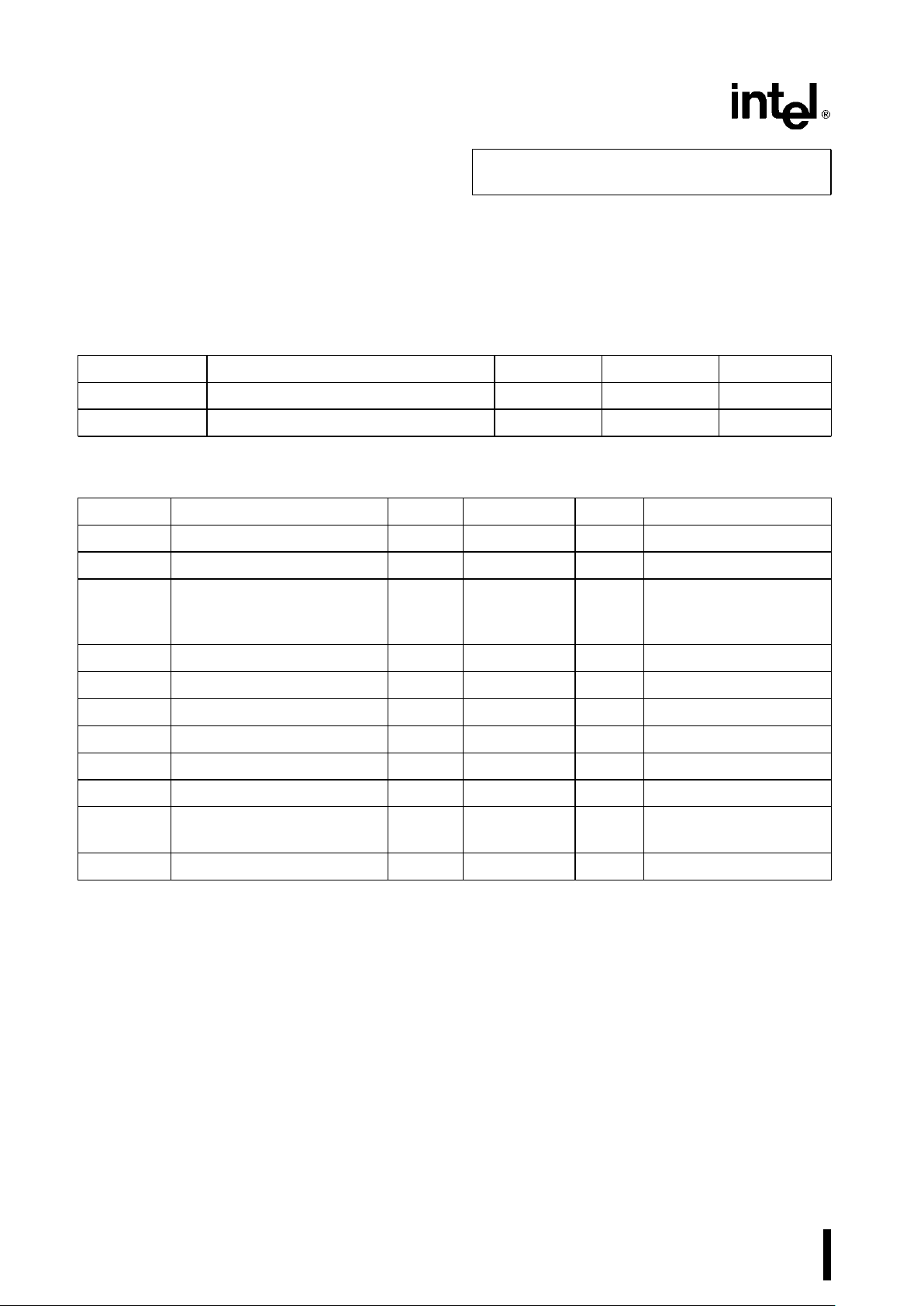
Operating Conditions
Symbol Description Min Max Units
T
C
Case Temperature (Instant On)
b
55
a
125
§
C
V
CC
Digital Supply Voltage 4.75 5.25 V
D.C. CHARACTERISTICS (Over Specified Operating Conditions)
Symbol Parameter Min Max Unit Test Conditions
V
IL
Input LOW Voltage
b
0.5 0.8 V
V
IH
Input HIGH Voltage 2.0 V
CC
a
0.5 V
V
ILC
Clock Input LOW Voltage
CKM
e
1: 2.0 V
CC
a
1V
CKMe0: 3.8 V
CC
a
1V
VOLOutput LOW Voltage 0.45 V I
OL
e
3.0 mA
V
OH
Output HIGH Voltage 2.4 V I
OH
eb
400 mA
I
LI
Input Leakage Current
g
10 mA0V
s
V
IN
s
V
CC
I
LO
Output Leakage Current
g
10 mA 0.45VsV
OUT
s
V
CC
I
CC
Power Supply Current 600 mA T
C
eb
55§C
C
IN
Input Capacitance 10 pF F
C
e
1 MHz
C
O
Input/Output Capacitance 20 pF F
C
e
1 MHz
(D0– D15)
C
CLK
CLK Capacitance 12 pF F
C
e
1 MHz
4
M80287
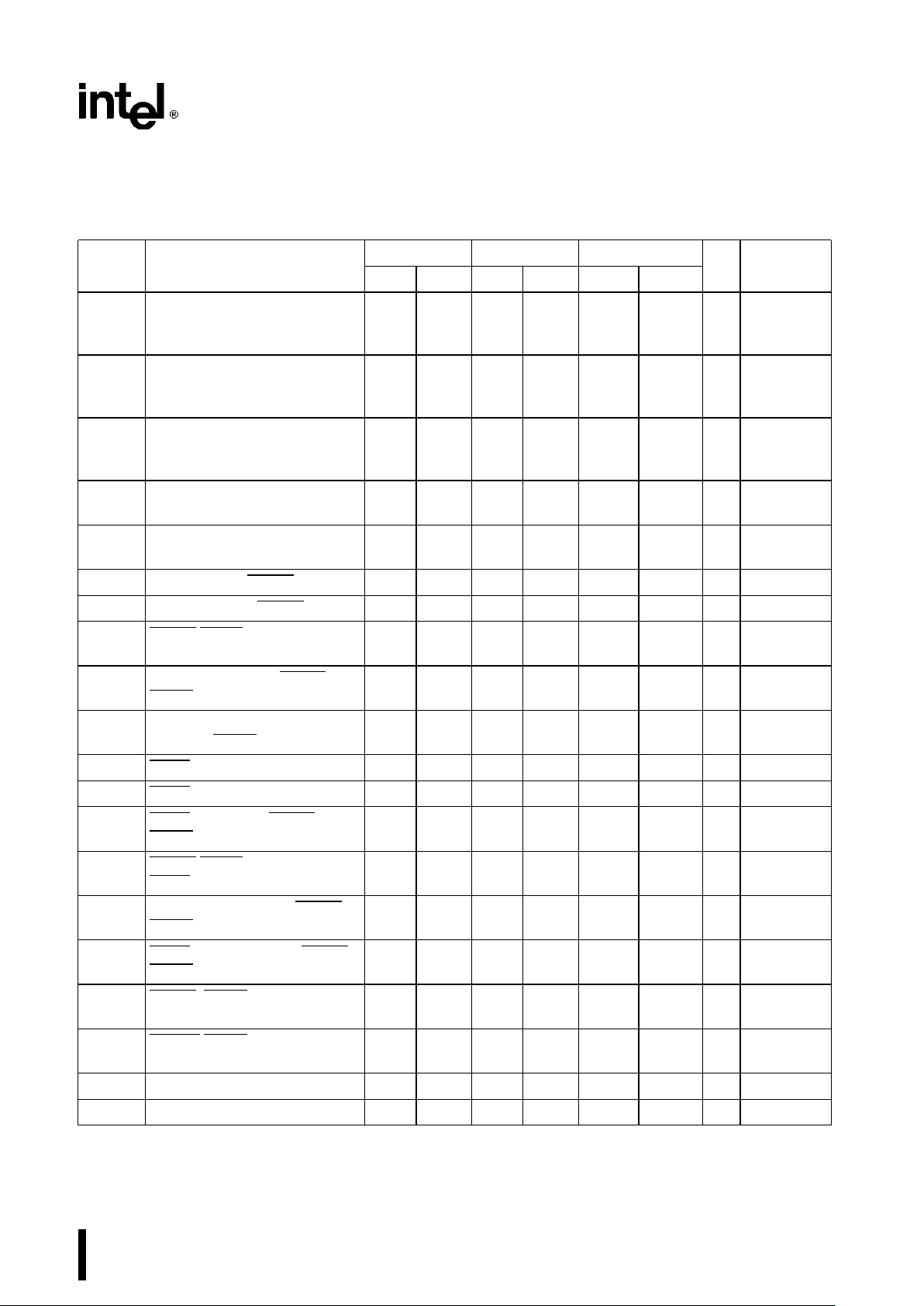
A.C. CHARACTERISTICS (Over Specified Operating Conditions)
TIMING REQUIREMENTS
A.C. timings are referenced to 0.8V and 2.0V points on signals unless otherwise noted.
Symbol Parameter
6 MHz 8 MHz 10 MHz
Unit Comments
-6 Min -6 Max -8 Min -8 Max -10 Min -10 Max
T
CLCL
CLK Period
CKM
e
1 165 500 125 500 100 500 ns
CKM
e
0 62.5 166 50 166 40 166 ns
T
CLCH
CLK LOW Time
CKMe1 100 343 68 343 53 343 ns At 0.8V
CKMe0 15 146 15 146 11 146 ns At 0.6V
T
CHCL
CLK HIGH Time
CKM
e
1 50 230 43 230 28 230 ns At 2.0V
CKM
e
0 20 151 20 151 18 151 ns At 3.6V
T
CH1CH2
CLK Rise Time 10 10 10 ns 1.0V to 3.6V
if CKMe1
T
CL2CL1
CLK Fall Time 10 10 10 ns 3.6V to 1.0V
if CKM
e
1
T
DVWH
Data Setup to NPWR Inactive 75 75 75 ns
T
WHDX
Data Hold from NPWR Inactive 30 18 18 ns
T
WLWH
NPWR NPRD Active Time 95 90 90 ns At 0.8V
T
RLRH
T
AVRL
Command Valid to NPWR or 0 0 0 ns
T
AVWL
NPRD Active
T
MHRL
Minimum Delay from PEREQ 130 130 100 ns
Active to NPRD
Active
T
KLKH
PEAK Active Time 85 85 60 ns At 0.8V
T
KHKL
PEAK Inactive Time 250 250 200 ns At 2.0V
T
KHCH
PEAK Inactive to NPWR,50 40 40 ns
NPRD
Inactive
T
CHKL
NPWR NPRD Inactive to
b
30
b
30
b
30 ns
PEAK
Inactive
T
WHAX
Command Hold from NPWR 30 30 22 ns
T
RHAX
NPRD Inactive
T
KLCL
PEAK Active Setup to NPWR 50 40 40 ns
NPRD
Active
T
IVCL
NPWR, NPRD, RESET 70 70 53 ns
to CLK Setup Time
T
CLIH
NPWR, NPRD, RESET 45 45 37 ns
from CLK Hold Time
T
RSCL
RESET to CLK Setup Time 20 20 20 ns
T
CLRS
RESET from CLK Hold Time 20 20 20 ns
NOTE:
T
ja
e
41§C/W
T
jc
e
14§C/W
5
M80287
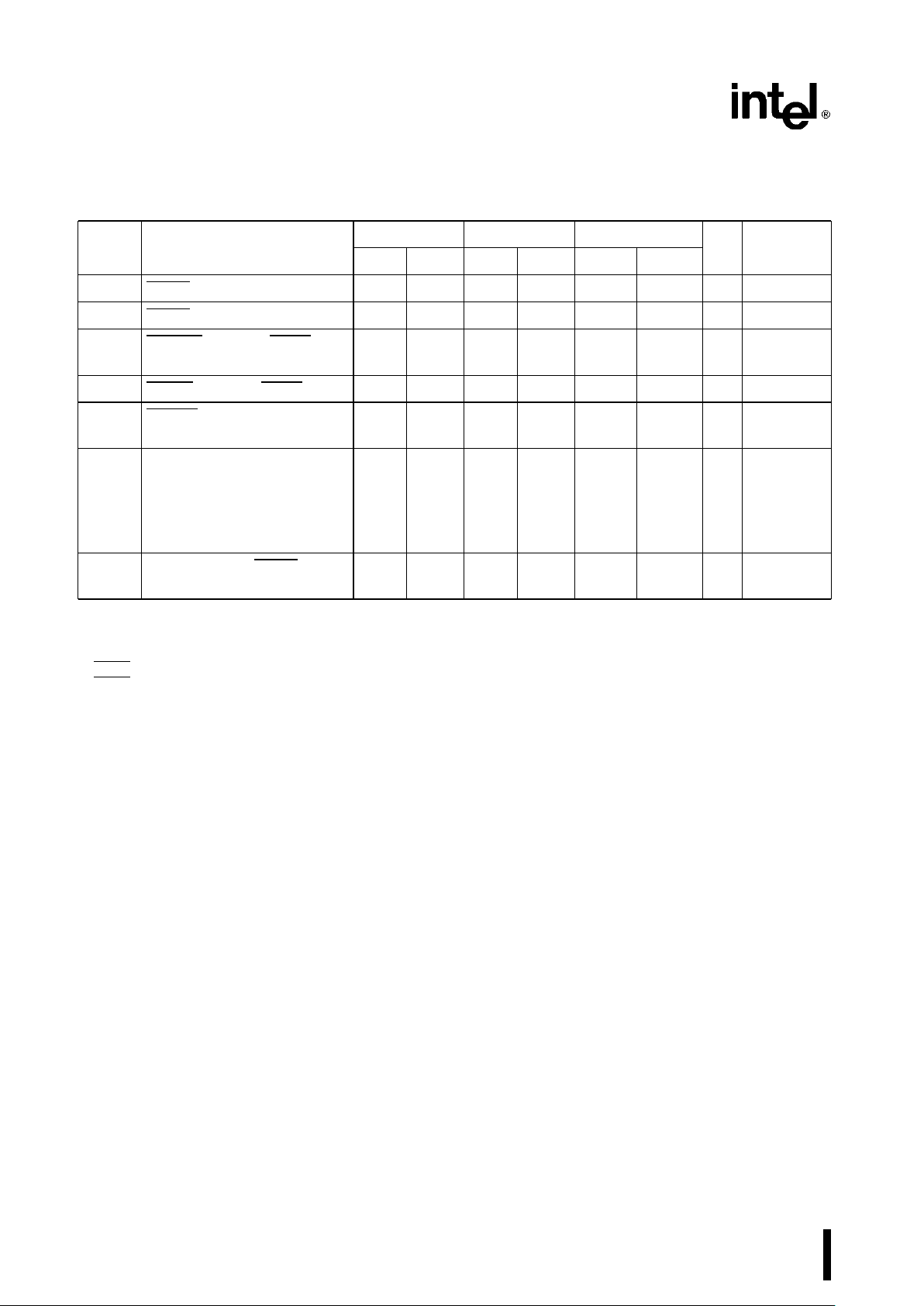
A.C. CHARACTERISTICS (Over Specified Operating Conditions)
TIMING RESPONSES
Symbol Parameter
6 MHz 8 MHz 10 MHz
Unit Comments
-6 Min -6 Max -8 Min -8 Max -10 Min -10 Max
T
RHQZ
NPRD Inactive to Data Float 37.5 35 25 ns (Note 2)
T
RLQV
NPRD Active to Data Valid 60 60 60 ns (Note 3)
T
ILBH
ERROR Active to BUSY 100 100 100 ns (Note 4)
Inactive
T
WLBV
NPWR Active to BUSY Active 100 100 100 ns (Note 5)
T
KLML
PEACK Active to PEREQ 127 127 127 ns (Note 6)
Inactive
T
CMDI
Command Inactive Time
Write-to-Write 95 95 75 ns At 2.0V
Read-to-Read 95 95 75 ns At 2.0V
Write-to-Read 95 95 75 ns At 2.0V
Read-to-Write 95 95 75 ns At 2.0V
T
RHCH
Data Hold from NPRD 3 3 3 ns (Note 7)
Inactive
NOTES:
2. Float condition occurs when output current is less than I
LO
on D0– D15.
3. D0– D15 loading: CL
e
100 pF.
4. BUSY
loading: CLe100 pF.
5. BUSY
loading: CLe100 pF.
6. On last data transfer of numeric instruction.
7. D0– D15 loading: CL
e
100 pF.
6
M80287
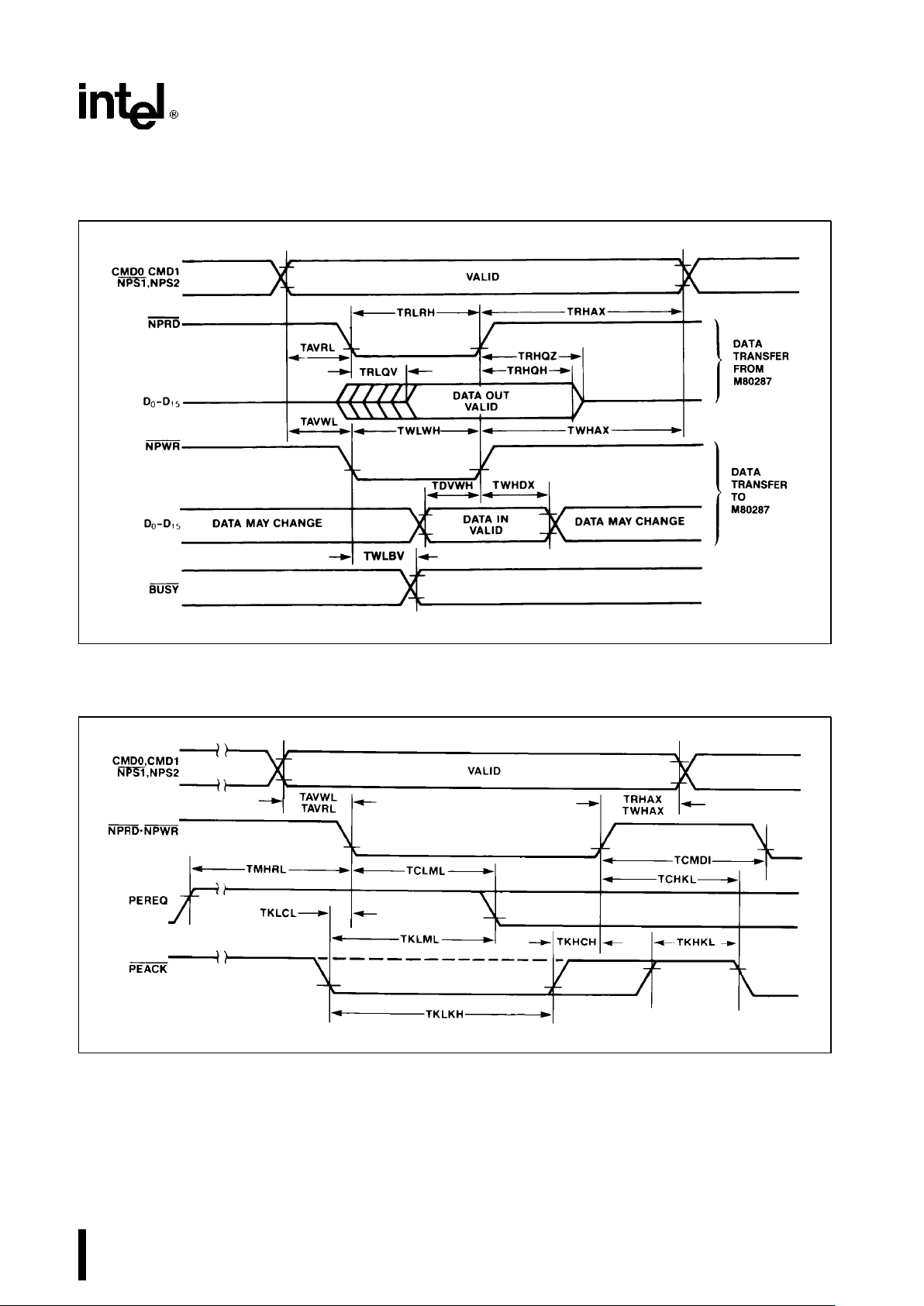
WAVEFORMS
DATA TRANSFER TIMING (Initiated by M80286)
271029–16
DATA CHANNEL TIMING (Initiated by M80287)
271029–17
7
M80287
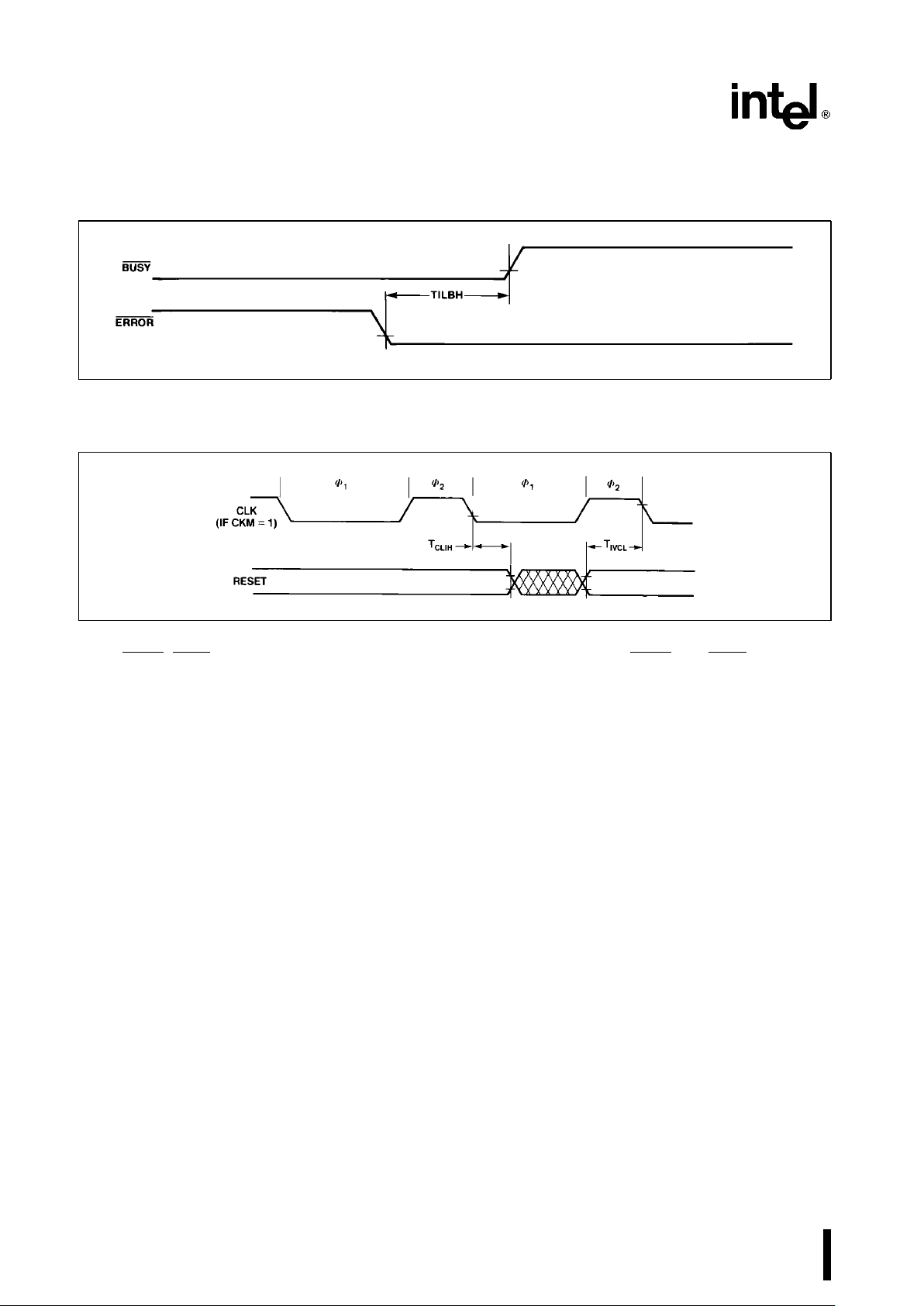
WAVEFORMS (Continued)
ERROR OUTPUT TIMING
271029–18
CLK, RESET TIMING (CKMe1)
271029–19
NOTE:
Reset, NPWR
, NPRD are inputs asynchronous to CLK. Timing requirements for RESET, NPWR, and NPRD are given for
testing purposes only, to assure recognition at a specific CLK edge.
8

M80287
WAVEFORMS (Continued)
CLK, NPRD
, NPWR TIMING (CKMe1)
271029–20
CLK, RESET TIMING (CKMe0)
271029–21
NOTE:
Reset must meet timing shown to guarantee known phase of internal
d
3 circuit.
CLK, NPRD, NPWR TIMING (CKMe0)
271029–22
NOTE:
Reset, NPWR
, NPRD are inputs asynchronous to CLK. Timing requirements for RESET, NPWR, and NPRD are given for
testing purposes only, to assure recognition at a specific CLK edge.
9

M80287
WAVEFORMS (Continued)
271029–23
AC Drive and Measurement PointsÐCLK Input
271029–24
AC Setup, Hold and Delay Time MeasurementÐGeneral
271029–25
AC Test Loading on Outputs
10

M80287
SYSTEM CONFIGURATION WITH
M80286
As a processor extension to an M80286, the
M80287 can be connected to the CPU as shown in
Figure 4. The data channel control signals (PEREQ,
PEACK
), the BUSY signal and the NPRD, NPWR
signals, allow the NPX to receive instructions and
data from the CPU. When in the protected mode, all
information received by the NPX is validated by the
M80286 memory management and protection unit.
Once started, the M80287 can process in parallel
with and independent of the host CPU. When the
NPX detects an error or exception, it will indicate this
to the CPU by asserting the ERROR
signal.
The NPX uses the processor extension request and
acknowledge pins of the M80286 CPU to implement
data transfers with memory under the protection
model of the CPU. The full virtual and physical address space of the M80286 is available. Data for the
M80287 in memory is addressed and represented in
the same manner as for an M8087.
The M80287 can operate either directly from the
CPU clock or with a dedicated clock. For operation
with the CPU clock (CKM
e
0), the M80287 works
at one-third the frequency of the system clock (i.e.,
for an 8 MHz M80286, the 16 MHz system clock is
divided down to 5.3 MHz). The M80287 provides a
capability to internally divide the CPU clock by three
to produce the required internal clock (33% duty cycle). To use a higher performance M80287 (8 MHz),
an M8284A clock driver and appropriate crystal may
be used to directly drive the M80287 with a (/3 duty
cycle clock on the CLK input (CKM
e
1).
SYSTEM CONFIGURATION WITH
M80386
The M80287 can also be connected as a processor
extension to the M80386 CPU as shown in Figure
4b. All software written for M8086/M8087 and
M80286/M80287 is object code compatible with
80386/M80287 and can benefit from the increased
speed of the M80386 CPU.
Note that the PEACK
input pin is pulled high. This is
because the M80287 is not required to keep track of
the number of words transferred during an operand
transfer when it is connected to the M80386 CPU.
Unlike the M80286 CPU, the M80386 CPU knows
the exact length of the operand being transferred
to/from the M80287. After an ESC instruction has
been sent to the M80287, the M80386 processor
extension data channel will initiate the data transfer
as soon as it receives the PEREQ signal from the
M80287. The transfer is automatically terminated by
the M80386 CPU as soon as all the words of the
operand have been transferred.
Because of the very high speed local bus of the
M80386 CPU, the M80287 cannot reside directly on
the CPU local bus. A local bus controller logic is
used to generate the necessary read and write cycle
timing as well as the chip select timings for the
M80287. The M80386 CPU uses I/O addresses
800000F8 through 800000FF to communicate with
the M80287. This is beyond the normal I/O address
space of the CPU and makes it easier to generate
the chip select signals using A31 and M/IO
.Itmay
also be noted that the M80386 CPU automatically
generates 16-bit bus cycles whenever it communicates with the M80287.
HARDWARE INTERFACE
Communication of instructions and data operands
between the M80286 and M80287 is handled by the
CMD0, CMD1, NPS1
, NPS2, NPRD, and NPWR signals. I/O port addresses 00F8H, 00FAH, and 00FCH
are used by the M80286 for this communication.
When any of these addresses are used, the NPS1
input must be LOW and NPS2 input HIGH. The
IORC
and IOWC outputs of the M82288 identify I/O
space transfers (see Figure 4). CMD0 should be
connected to latched M80286 A1 and CMD1 should
be connected to latched M80286 A2.
I/O ports 00F8H to 00FFH are reserved for the
M80286/M80287 interface. To guarantee correct
operation of the M80287, programs must not perform any I/O operations to these ports.
The PEREQ, PEACK
, BUSY, and ERROR signals of
the M80287 are connected to the same-named
M80286 input. The data pins of the M80287 should
be directly connected to the M80286 data bus. Note
that all bus drivers connected to the M80286 local
bus must be inhibited when the M80286 reads from
the M80287. The use of COD/INTA
and M/IO in the
decoder prevents INTA bus cycles from disabling
the data transceivers.
The S1
,S0, COD/INTA
, READY, HLDA, and CLK
pins of the M80286 are connected to the same
named pins on the M80287. These signals allow the
M80287 to monitor the execution of ESCAPE instructions by the M80826.
PROGRAMMING INTERFACE
Table 2 lists the seven data types the M80287 supports and presents the format for each type. These
values are stored in memory with the least significant digits at the lowest memory address. Programs
retrieve these values by generating the lowest address. All values should start at even addresses for
maximum system performance.
11

M80287
271029–4
Figure 4. M80286/20 System Configuration
Internally the M80287 holds all numbers in the temporary real format. Load instructions automatically
convert operands represented in memory as 16-,
32-, or 64-bit integers, 32- or 64-bit floating point
numbers or 18-digit packed BCD numbers into temporary real format. Store instructions perform the reverse type conversion.
M80287 computations use the processor’s register
stack. These eight 80-bit registers provide the equivalent capacity of 40 16-bit registers. The M80287
register set can be accessed as a stack, with instructions operating on the top one or two stack elements, or as a fixed register set, with instructions
operating on explicitly designated registers.
Table 6 lists the M80287’s instructions by class. No
special programming tools are necessary to use the
M80287 since all new instructions and data types
are directly supported by the M80286 assembler and
appropriate high level languages. All M8086/88 development tools which support the M8087 can also
be used to develop software for the M80286 in real
address mode.
Table 3 gives the execution times of some typical
numeric instructions.
12

M80287
Table 2. M80287 Datatype Representation in Memory
271029–5
NOTES:
1. S
e
Sign bit (0epositive, 1enegative)
2. d
n
e
Decimal digit (two per byte)
3. X
e
Bits have no significance; M8087 ignores when loading, zeros when storing.
4.
U
e
Position of implicit binary point
5. I
e
Integer bit of significand; stored in temporary real, implicit in short and long real.
6. Exponent Bias (normalized values):
Short Real: 127 (7FH)
Long Real: 1023 (3FFH)
Temporary Real: 16383 (3FFFH)
7. Packed BCD: (
b
1)S(D17...D0)
8. Real: (
b
1)S(2
E-BIAS
)(F0F1...)
SOFTWARE INTERFACE
The M80286/20 is programmed as a single processor. All communication between the M80286 and
the M80287 is transparent to software. The CPU automatically controls the M80287 whenever a numeric instruction is executed. All memory addressing
modes, physical memory, and virtual memory of the
CPU are available for use by the NPX.
Since the NPX operates in parallel with the CPU, any
errors detected by the NPX may be reported after
the CPU has executed the ESCAPE instruction
which caused it. To allow identification of the failing
numeric instruction, the NPX contains two pointer
registers which identify the address of the failing numeric instruction and the numeric memory operand if
appropriate for the instruction encountering this error.
13

M80287
Table 3. Execution Time for Selected M80287 Instructions
Approximate Execution
Floating Point Instruction
Time (ms)
M80287
(5 MHz Operation)
Add/Subtract 14/18
Multiply (Single Precision) 19
Multiply (Extended Precision) 27
Divide 39
Compare 9
Load (Double Precision) 10
Store (Double Precision) 21
Square Root 36
Tangent 90
Exponentiation 100
INTERRUPT DESCRIPTION
Several interrupts of the M80286 are used to report
exceptional conditions while executing numeric programs in either real or protected mode. The interrupts and their functions are shown in Table 4.
PROCESSOR ARCHITECTURE
As shown in Figure 1, the NPX is internally divided
into two processing elements, the bus interface unit
(BIU) and the numeric execution unit (NEU). The
NEU executes all numeric instructions, while the BIU
receives and decodes instructions, requests operand transfers to and from memory and executes
processor control instructions. The two units are
able to operate independently of one another allowing the BIU to maintain asynchronous communication with the CPU while the NEU is busy processing
a numeric instruction.
BUS INTERFACE UNIT
The BIU decodes the ESC instruction executed by
the CPU. If the ESC code defines a math instruction,
the BIU transmits the formatted instruction to the
NEU. If the ESC code defines an administrative instruction, the BIU executes it independently of the
NEU. The parallel operation of the NPX with the
CPU is normally transparent to the user. The BIU
generates the BUSY
and ERROR signals for
M80286/M80287 processor synchronization, and
error notification, respectively.
The M80287 executes a single numeric instruction
at a time. When executing most ESC instructions,
the M80286 tests the BUSY
pin and waits until the
M80287 indicates that it is not busy before initiating
the command. Once initiated, the M80286 continues
program execution while the M80287 executes the
ESC instruction. In M8086/20 systems, this synchronization is achieved by placing a WAIT instruction
before an ESC instruction. For most ESC instructions, the M80286/20 does not require a WAIT instruction before the ESC opcode. However, the
M80286/20 will operate correctly with these WAIT
instructions. In all cases, a WAIT or ESC instruction
should be inserted after any M80287 store to memory (except FSTSW and FSTCW) or load from memory (except FLDENV or FRSTOR) before the M80286
reads or changes the value.
Data transfers between memory and the M80287,
when needed, are controlled by the PEREQ,
PEACK
, NPRD, NPWR, NPS1, NPS2 signals. The
M80286 does the actual data transfer with memory
through its processor extension data channel. Numeric data transfers with memory performed by the
M80286 use the same timing as any other bus cycle.
Control signals for the M80287 are generated by the
M80286 as shown in Figure 4, and meet the timing
requirements shown in the AC requirements section.
14

M80287
Table 4. Interrupt Vectors
Interrupt Number Interrupt Function
7 An ESC instruction was encountered when EM or TS of the M80286 MSW was
set. EM
e
1 indicates that software emulation of the instruction is required. When
TS is set, either an ESC or WAIT instruction will cause interrupt 7. This indicates
that the current NPX context may not belong to the current task.
9 The second or subsequent words of a numeric operand in memory exceeded a
segment’s limit. This interrupt occurs after executing an ESC instruction. The
saved return address will not point at the numeric instruction causing this interrupt.
After processing the addressing error, the M80286 program can be restarted at
the return address with IRET. The address of the failing numeric instruction and
numeric operand are saved in the M80287. An interrupt handler for this interrupt
must
execute FNINIT before
any
other ESC or WAIT instruction.
13 The starting address of a numeric operand is not in the segment’s limit. The return
address will point at the ESC instruction (including prefixes) causing this error. The
M80287 has not executed this instruction. The instruction and data address in
M80287 refer to a previous, correctly executed, instruction.
16 The previous numeric instruction caused an unmasked numeric error. The
address of the faulty numeric instruction or numeric data operand is stored in the
M80287. Only ESC or WAIT instructions can cause this interrupt. The M80286
return address will point at a WAIT or ESC instruction, including prefixes, which
may be restarted after clearing the error condition in the NPX.
NUMERIC EXECUTION UNIT
The NEU executes all instructions that involve the
register stack; these include arithmetic, logical, transcendental, constant and data transfer instructions.
The data path in the NEU is 84 bits wide (68 fraction
bits, 15 exponent bits and a sign bit) which allows
internal operand transfers to be performed at very
high speeds.
When the NEU begins executing an instruction, it
activates the BIU BUSY
signal. This signal is used in
conjunction with the CPU WAIT instruction or automatically with most of the ESC instructions to synchronize both processors.
REGISTER SET
The M80287 register set is shown in Figure 5. Each
of the eight data registers in the M8087’s register
stack is 80 bits wide and is divided into ‘‘fields’’ corresponding to the NPX’s temporary real data type.
At a given point in time the TOP field in the status
word identifies the current top-of-stack register. A
‘‘push’’ operation decrements TOP by 1 and loads a
value into the new top register. A ‘‘pop’’ operation
stores the value from the current top register and
then increments TOP by 1. Like M80286 stacks in
memory, the M80287 register stack grows ‘‘down’’
toward lower-addressed registers.
Instructions may address the data registers either
implicitly or explicitly. Many instructions operate on
the register at the top of the stack. These instructions implicitly address the register pointed by the
TOP. Other instructions allow the programmer to explicitly specify the register which is to be used. Explicit register addressing is ‘‘top-relative.’’
Status Word
The 16-bit status word (in the status register) shown
in Figure 6 reflects the overall state of the M80287.
It may be read and inspected by CPU code. The
busy bit (bit 15) indicates whether the NEU is executing an instruction (B
e
1) or is idle (Be0).
The instructions FSTSW, FSTENV, FSTSWAX and
FSAVE which store the status word are executed
exclusively by the BIU and do not set the busy bit
themselves or require the Busy bit be cleared in order to be executed.
The four numeric condition code bits (C
0–C3
) are
similar to the flags in a CPU: instructions that perform arithmetic operations update these bits to reflect the outcome of NDP operations. The effect of
these instructions on the condition code bits is summarized in Tables 5a and 5b.
15

M80287
271029–11
Figure 5. M80287 Register Set
271029–6
NOTES:
1. ES is set if any unmasked exception bit is set, cleared otherwise.
2. See Table 5 for condition code interpretation.
3. Top Values
000
e
Register 0 is Top of Stack
001
e
Register 1 is Top of Stack
#
#
#
111eRegister 7 is Top of Stack
*For definitions, see the section on exception handling.
Figure 6. M80287 Status Word
16

M80287
Bits 14 –12 of the status word point to the M80287
register that is the current top-of-stack (TOP) as described above. Figure 6 shows the six error flags in
bits 5– 0 of the status word. Bits 5 – 0 are set to indicate that the NEU has detected an exception while
executing an instruction. The section on exception
handling explains how they are set and used.
Bit 7 is the error status bit. This bit is set if any unmasked exception bit is set and cleared otherwise. If
this bit is set, the ERROR signal is asserted.
Tag Word
The tag word marks the content of each register as
shown in Figure 7. The principal function of the tag
word is to optimize the NPX’s performance. The tag
word can be used, however, to interpret the contents of M80287 registers.
Instruction and Data Pointers
The instruction and data pointers (see Figures 8a
and 8b) are provided for user-written error handlers.
Whenever the M80287 executes a new instruction,
the BIU saves the instruction address, the operand
address (if present) and the instruction opcode.
M80287 instructions can store this data into memory.
The instruction and data pointers appear in one of
two formats depending on the operating mode of the
M80287. In real mode, these values are the 20-bit
physical address and 11-bit opcode formatted like
the M8087. In protected mode, these values are the
32-bit virtual addresses used by the program which
executed an ESC instruction. The same FLDENV/
FSTENV/FSAVE/FRSTOR instructions as those of
the M8087 are used to transfer these values between the M80287 registers and memory.
Table 5a. Condition Code Interpretation
Instruction
C
3
C
2
C
1
C
0
Interpretation
Type
Compare, Test 0 0 X 0 STlSource or 0 (FTST)
00X1ST
k
Source or 0 (FTST)
10X0ST
e
Source or 0 (FTST)
1 1 X 1 ST is not comparable
Remainder Q
1
0Q
0
Q
2
Complete reduction with
three low bits of quotient
(See Table 5b)
U 1 U U Incomplete Reduction
Examine 0 0 0 0 Valid, positive unnormalized
0 0 0 1 Invalid, positive, exponent
e
0
0 0 1 0 Valid, negative, unnormalized
0 0 1 1 Invalid, negative, exponente0
0 1 0 0 Valid, positive, normalized
0 1 0 1 Infinity, positive
0 1 1 0 Valid, negative, normalized
0 1 1 1 Infinity, negative
1 0 0 0 Zero, positive
1 0 0 1 Empty
1 0 1 0 Zero, negative
1 0 1 1 Empty
1 1 0 0 Invalid, positive, exponente0
1 1 0 1 Empty
1 1 1 0 Invalid, negative, exponente0
1 1 1 1 Empty
NOTES:
1. ST
e
Top of stack
2. X
e
value is not affected by instruction
3. U
e
value is undefined following instruction
4. Q
n
e
Quotient bit n
17

M80287
271029–12
NOTE:
The index i of tag(i) is
not
top-relative. A program typically uses the ‘‘top’’ field of Status Word to determine which tag(i)
field refers to logical top of stack.
Figure 7. M80287 Tag Word
Table 5b. Condition Code Interpretation After
FPREM Instruction As a Function of
Dividend Value
Dividend Range Q
2
Q
1
Q
0
Dividendk2 * Modulus C
3
C
1
Q
0
Dividendk4 * Modulus C
3
Q
1
Q
0
Dividendt4 * Modulus Q
2
Q
1
Q
0
NOTE:
1. Previous value of indicated bit, not affected by FPREM
instruction execution.
The saved instruction address in the M80287 will
point at any prefixes which preceded the instruction.
This is different than in the M8087 which only pointed at the ESCAPE instruction opcode.
Control Word
The NPX provides several processing options which
are selected by loading a word from memory into the
control word. Figure 9 shows the format and encoding of fields in the control word.
The low order byte of this control word configures
the M80287 error and exception masking. Bits 5 – 0
of the control word contain individual masks for each
of the six exceptions that the M80287 recognizes.
The high order byte of the control word configures
the M80287 operating mode including precision,
rounding, and infinity control. The precision control
bits (bits 9– 8) can be used to set the M80287 internal operating precision at less than the default of
temporary real (80-bit) precision. This can be useful
in providing compatibility with the early generation
arithmetic processors of smaller precision than the
M80287. The rounding control bits (bits 11–10) provide for directed rounding and true chop as well as
the unbiased round to nearest even mode specified
in the IEEE standard. Control over closure of the
number space at infinity is also provided (either affine closure:
g
%
, or projective closure:%, is treat-
ed as unsigned, may be specified).
EXCEPTION HANDLING
The M80287 detects six different exception conditions that can occur during instruction execution.
Any or all exceptions will cause the assertion of
ERROR
signal if the appropriate exception masks
are not set.
The exceptions that the M80287 detects and the
‘default’ procedures that will be carried out if the exception is masked, are as follows:
Invalid Operation: Stack overflow, stack underflow,
indeterminate form (0/0,%–%, etc.) or the use of a
Non-Number (NAN) as an operand. An exponent
value of all ones and non-zero significand is reserved to identify NANs. If this exception is masked,
the M80287 default response is to generate a specific NAN called INDEFINITE, or to propagate already existing NANs as the calculation result.
Overflow: The result is too large in magnitude to fit
the specified format. The M80287 will generate an
encoding for infinity if this exception is masked.
Zero Divisor: The divisor is zero while the dividend
is a non-infinite, non-zero number. Again, the
M80287 will generate an encoding for infinity if this
exception is masked.
Underflow: The result is non-zero but too small in
magnitude to fit in the specified format. If this exception is masked the M82087 will denormalize (shift
right) the fraction until the exponent is in range. The
process is called gradual underflow.
18

M80287
271029–13
Figure 8a. Protected Mode Instruction and Data Pointer Image in Memory
Denormalized Operand: At least one of the oper-
ands is denormalized; it has the smallest exponent
but a non-zero significand. Normal processing continues if this exception is masked off.
Inexact Result: If the true result is not exactly representable in the specified format, the result is rounded according to the rounding mode, and this flag is
set. If this exception is masked, processing will simply continue.
If the error is not masked, the corresponding error
bit and the error status bit (ES) in the control word
will be set, and the ERROR
output signal will be asserted. If the CPU attempts to execute another ESC
or WAIT instruction, exception 7 will occur.
The error condition must be resolved via an interrupt
service routine. The M80287 saves the address of
the floating point instruction causing the error as well
as the address of the lowest memory location of any
memory operand required by that instruction.
M8086/20 COMPATIBILITY
M80286/20 supports portability of M8086/20 programs when it is in the real address mode. However,
because of differences in the numeric error handling
techniques, error handling routines
may
need to be
changed. The differences between an M80286/20
and M8086/20 are:
1. The NPX error signal does not pass through an
interrupt controller (M8087 INT signal does).
Therefore, any interrupt controller oriented instructions for the M8086/20 may have to be deleted.
2. Interrupt vector 16 must point at the numeric error
handler routine.
3. The saved floating point instruction address in the
M80287 includes any leading prefixes before the
ESCAPE opcode. The corresponding saved address
of the M8087 does not include leading prefixes.
4. In protected mode, the format of the saved instruction and operand pointers is different than for
the M8087. The instruction opcode is not savedÐit
must be read from memory if needed.
5. Interrupt 7 will occur when executing ESC instructions with either TS or EM of MSW
e
1. If TS of
MSW
e
1 then WAIT will also cause interrupt 7. An
interrupt handler should be added to handle this situation.
6. Interrupt 9 will occur if the second or subsequent
words of a floating point operand fall outside a segment’s size. Interrupt 13 will occur if the starting address of a numeric operand falls outside a segment’s size. An interrupt handler should be added to
report these programming errors.
In the protected mode, M8086/20 application code
can be directly ported via recompilation if the 286
memory protection rules are not violated.
19

M80287
271029–14
Figure 8b. Real Mode M80287 Instruction and Data Pointer Image in Memory
271029–7
NOTES:
1. Precision Control 2. Rounding Control
00
e
24 Bits (short real) 00eRound To Nearest Or Even
01
e
Reserved 01eRound Down (Toward
b%
)
10
e
53 Bits (long real) 10eRound Up (Toward
a %
)
11
e
64 Bits (temp real) 11eChop (Truncate Toward Zero)
Figure 9. M80287 Control Word
20

M80287
Table 6. M80287 Extensions to the M80286 Instruction Set
Mnemonics©Intel 1982. 271029–8
21

M80287
Table 6. M80287 Extensions to the M80286 Instruction Set (Continued)
271029–9
NOTE:
1. If P
e
1 then add 5 clocks.
22

M80287
Table 6. M80287 Extensions to the M80286 Instruction Set (Continued)
271029–10
23

M80287
Table 6. M80287 Extensions to the M80286 Instruction Set (Continued)
271029–15
NOTES:
1. if mod
e
00 then DISPe0*, disp-low and disp-high are absent
if mod
e
01 then DISPedisp-low sign-extended to 16-bits, disp-high is absent
if mod
e
10 then DISPedisp-high; disp-low
if mod
e
11 then r/m is treated as an ST(i) field
2. if r/m
e
000 then EAe(BX)a(SI)aDISP
if r/m
e
001 then EAe(BX)a(DI)aDISP
if r/m
e
010 then EAe(BP)a(SI)aDISP
if r/m
e
011 then EAe(BP)a(DI)aDISP
if r/m
e
100 then EAe(SI)aDISP
if r/m
e
101 then EAe(DI)aDISP
if r/m
e
110 then EAe(BP)aDISP
if r/m
e
111 then EAe(BX)aDISP
*except if mod
e
000 and r/me110 then EAedisp-high; disp-low.
3. MF
e
Memory Format
00Ð32-bit Real
01Ð32-bit Integer
10Ð64-bit Real
11Ð16-bit Integer
4. ST(0)
e
Current stack top
ST(i) i
th
register below stack top
5. d
e
Destination
0ÐDestination is ST(0)
1ÐDestination is ST(i)
6. P
e
Pop
0ÐNo pop
1ÐPop ST(0)
7. R
e
Reverse: When de1 reverse the sense of R
0ÐDestination (op) Source
1ÐSource (op) Destination
8. For FSQRT:
b
0sST(0)
s
a %
For FSCALE:
b
2
15
s
ST(1)
k
a
215and ST(1) integer
For F2XM1: 0
s
ST(0)s2
b
1
For FYL2X: 0kST(0)
k
%
b%
k
ST(1)
k
a %
For FYL2XP1: 0
s
IST(0)Ik(2
b
S
2)/2
b%
k
ST(1)
k
%
For FPTAN: 0
s
ST(0)
s
q/4
For FPATAN: 0
s
ST(0)kST(1)
k
a %
9. ESCAPE bit pattern is 11011.
INTEL CORPORATION, 2200 Mission College Blvd., Santa Clara, CA 95052; Tel. (408) 765-8080
INTEL CORPORATION (U.K.) Ltd., Swindon, United Kingdom; Tel. (0793) 696 000
INTEL JAPAN k.k., Ibaraki-ken; Tel. 029747-8511
Printed in U.S.A./xxxx/1296/2.5K/RP SM
Military Operation
 Loading...
Loading...