


Data Sheet, V1.2, March 2007
XC164SM
16-Bit Single-Chip Microcontroller
with C166SV2 Core
Microcontrollers

Edition 2007-03
Published by
Infineon Technologies AG
81726 Munich, Germany
© 2007 Infineon Technologies AG
All Rights Reserved.
Legal Disclaimer
The information given in this document shall in no event be regarded as a guarantee of conditions or
characteristics. With respect to any examples or hints given herein, any typical values stated herein and/or any
information regarding the application of the device, Infineon Technologies hereby disclaims any and all warranties
and liabilities of any kind, including without limitation, warranties of non-infringement of intellectual property rights
of any third party.
Information
For further information on technology, delivery terms and conditions and prices, please contact the nearest
Infineon Technologies Office (www.infineon.com).
Warnings
Due to technical requirements, components may contain dangerous substances. For information on the types in
question, please contact the nearest Infineon Technologies Office.
Infineon Technologies components may be used in life-support devices or systems only with the express written
approval of Infineon Technologies, if a failure of such components can reasonably be expected to cause the failure
of that life-support device or system or to affect the safety or effectiveness of that device or system. Life support
devices or systems are intended to be implanted in the human body or to support and/or maintain and sustain
and/or protect human life. If they fail, it is reasonable to assume that the health of the user or other persons may
be endangered.
Data Sheet, V1.2, March 2007
XC164SM
16-Bit Single-Chip Microcontroller
with C166SV2 Core
Microcontrollers
XC164SM
Revision History: V1.2, 2007-03
Previous Version(s):
V1.1, 2006-08
V1.0, 2005-11
Page Subjects (major changes since last revision)
6 Design steps of the derivatives differentiated.
50 Power consumption of the derivatives differentiated.
51 Figure 10 adapted.
52 Figure 12 adapted.
62 Packages of the derivatives differentiated.
XC164SM
Derivatives
63 Thermal resistances of the derivatives differentiated.
all “Preliminary” removed
We Listen to Your Comments
Any information within this document that you feel is wrong, unclear or missing at all?
Your feedback will help us to continuously improve the quality of this document.
Please send your proposal (including a reference to this document) to:
mcdocu.comments@infineon.com
Data Sheet V1.2, 2007-03

XC164SM
Derivatives
Table of Contents
Table of Contents
1 Summary of Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 General Device Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Pin Configuration and Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 Memory Subsystem and Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Central Processing Unit (CPU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.3 Interrupt System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.4 On-Chip Debug Support (OCDS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.5 Capture/Compare Unit (CAPCOM2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.6 The Capture/Compare Unit CAPCOM6 . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.7 General Purpose Timer (GPT12E) Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.8 Real Time Clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.9 A/D Converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.10 Asynchronous/Synchronous Serial Interfaces (ASC0/ASC1) . . . . . . . . . . 36
3.11 High Speed Synchronous Serial Channels (SSC0/SSC1) . . . . . . . . . . . . 37
3.12 Watchdog Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.13 Clock Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.14 Parallel Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.15 Power Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.16 Instruction Set Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Electrical Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.1 General Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.2 DC Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3 Analog/Digital Converter Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.4 AC Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.4.1 Definition of Internal Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.4.2 On-chip Flash Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.4.3 External Clock Drive XTAL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5 Package and Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1 Packaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2 Flash Memory Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Data Sheet 3 V1.2, 2007-03

XC164SM16-Bit Single-Chip Microcontroller with C166SV2 Core
XC166 Family
1 Summary of Features
For a quick overview or reference, the XC164SM’s properties are listed here in a
condensed way.
• High Performance 16-bit CPU with 5-Stage Pipeline
– 25 ns Instruction Cycle Time at 40 MHz CPU Clock (Single-Cycle Execution)
– 1-Cycle Multiplication (16 × 16 bit), Background Division (32 / 16 bit) in 21 Cycles
– 1-Cycle Multiply-and-Accumulate (MAC) Instructions
– Enhanced Boolean Bit Manipulation Facilities
– Zero-Cycle Jump Execution
– Additional Instructions to Support HLL and Operating Systems
– Register-Based Design with Multiple Variable Register Banks
– Fast Context Switching Support with Two Additional Local Register Banks
– 16 Mbytes Total Linear Address Space for Code and Data
– 1024 Bytes On-Chip Special Function Register Area (C166 Family Compatible)
• 16-Priority-Level Interrupt System with up to 63 Sources, Sample-Rate down to 50 ns
• 8-Channel Interrupt-Driven Single-Cycle Data Transfer Facilities via
Peripheral Event Controller (PEC), 24-Bit Pointers Cover Total Address Space
• Clock Generation via on-chip PLL (factors 1:0.15 … 1:10), or
via Prescaler (factors 1:1 … 60:1)
• On-Chip Memory Modules
– 2 Kbytes On-Chip Dual-Port RAM (DPRAM)
– 0/2/4 Kbytes
– 2 Kbytes On-Chip Program/Data SRAM (PSRAM)
– 32/64/128
• On-Chip Peripheral Modules
– 14-Channel A/D Converter with Programmable Resolution (10-bit or 8-bit) and
Conversion Time (down to 2.55 μs or 2.15 μs)
– 16-Channel General Purpose Capture/Compare Unit (CAPCOM2)
– Capture/Compare Unit for flexible PWM Signal Generation (CAPCOM6)
– Multi-Functional General Purpose Timer Unit with 5 Timers
– Two Synchronous/Asynchronous Serial Channels (USARTs)
– Two High-Speed-Synchronous Serial Channels
– On-Chip Real Time Clock, Driven by the Main Oscillator
• Idle, Sleep, and Power Down Modes with Flexible Power Management
• Programmable Watchdog Timer and Oscillator Watchdog
1)
On-Chip Data SRAM (DSRAM)
1)
Kbytes On-Chip Program Memory (Flash Memory)
1) Depends on the respective derivative. See Table 1 “XC164SM Derivative Synopsis” on Page 6.
Data Sheet 4 V1.2, 2007-03

XC164SM
Derivatives
Summary of Features
• Up to 47 General Purpose I/O Lines,
partly with Selectable Input Thresholds and Hysteresis
• On-Chip Bootstrap Loader
• On-Chip Debug Support via JTAG Interface
• 64-Pin Green LQFP Package for the -16F derivatives, 0.5 mm (19.7 mil) pitch (RoHS
compliant)
• 64-Pin TQFP Package for the -4F/8F derivatives, 0.5 mm (19.7 mil) pitch (RoHS
compliant)
Ordering Information
The ordering code for Infineon microcontrollers provides an exact reference to the
required product. This ordering code identifies:
• the derivative itself, i.e. its function set, the temperature range, and the supply voltage
• the package and the type of delivery.
For the available ordering codes for the XC164SM please refer to your responsible sales
representative or your local distributor.
This document describes several derivatives of the XC164SM group. Table 1
enumerates these derivatives and summarizes the differences. As this document refers
to all of these derivatives, some descriptions may not apply to a specific product.
For simplicity all versions are referred to by the term XC164SM throughout this
document.
Data Sheet 5 V1.2, 2007-03
Table 1 XC164SM Derivative Synopsis
Derivative
1)
Temp.
Range
Program
Memory
XC164SM
Derivatives
Summary of Features
On-Chip RAM Interfaces
SAF-XC164SM-16F40F
SAF-XC164SM-16F20F
-40 to
85 °C
128 Kbytes
Flash
2 Kbytes DPRAM,
4 Kbytes DSRAM,
2 Kbytes PSRAM
SAF-XC164SM-8F40F
SAF-XC164SM-8F20F
-40 to
85 °C
64 Kbytes
Flash
2 Kbytes DPRAM,
2 Kbytes DSRAM,
2 Kbytes PSRAM
SAF-XC164SM-4F40F
SAF-XC164SM-4F20F
1) This Data Sheet is valid for:
devices starting with and including design step BA for the -16F derivatives, and for
devices starting with and including design step AA for -4F/8F derivatives.
-40 to
85 °C
32 Kbytes
Flash
2 Kbytes DPRAM,
2 Kbytes PSRAM
ASC0, ASC1,
SSC0, SSC1
ASC0, ASC1,
SSC0, SSC1
ASC0, ASC1,
SSC0, SSC1
Data Sheet 6 V1.2, 2007-03
XC164SM
Derivatives
General Device Information
2 General Device Information
The XC164SM derivatives are high-performance members of the Infineon XC166 Family
of full featured single-chip CMOS microcontrollers. These devices extend the
functionality and performance of the C166 Family in terms of instructions (MAC unit),
peripherals, and speed. They combine high CPU performance (up to 40 million
instructions per second) with high peripheral functionality and enhanced IO-capabilities.
They also provide clock generation via PLL and various on-chip memory modules such
as program Flash, program RAM, and data RAM.
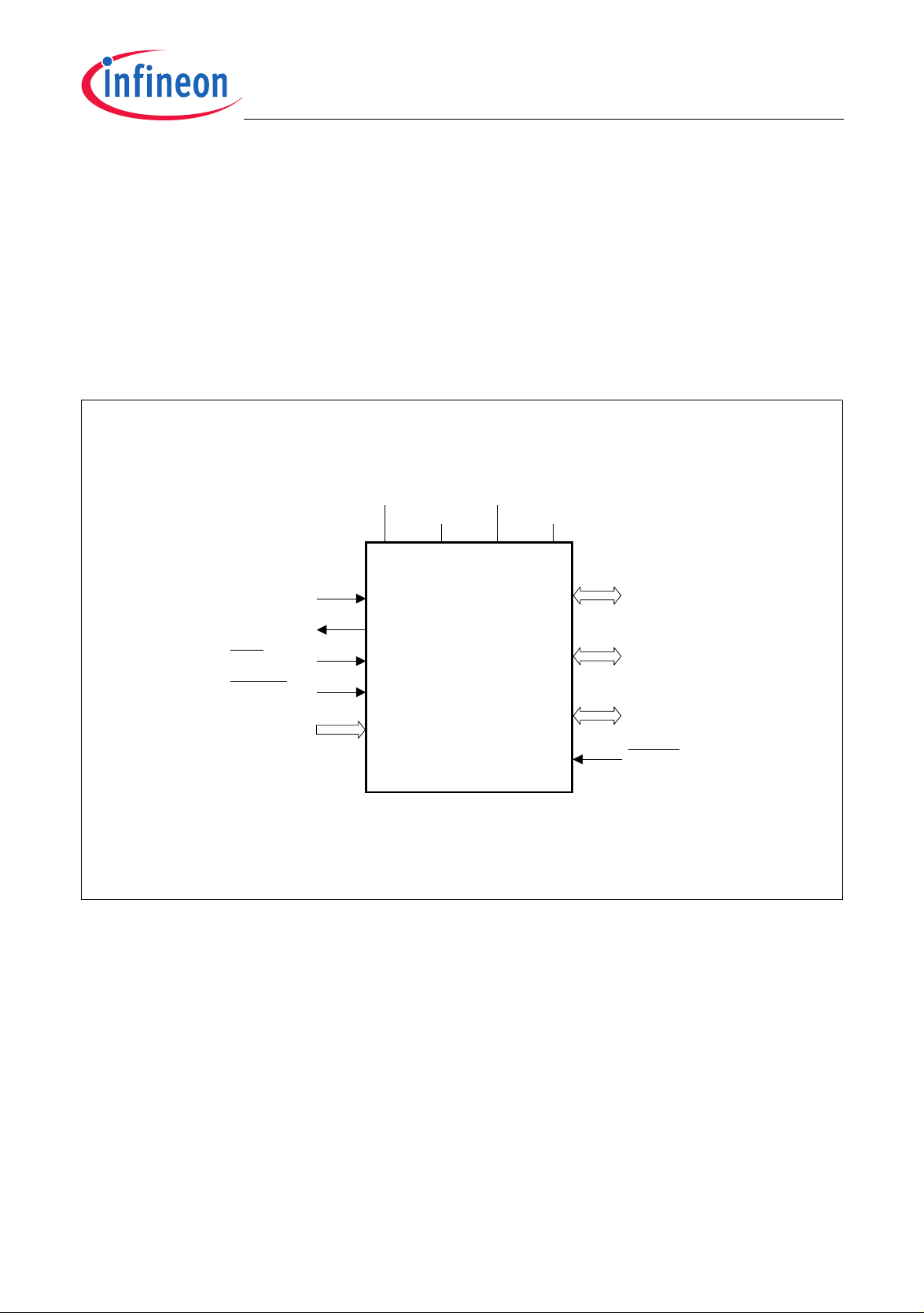
XTAL1
XTAL2
NMI
RSTIN
Port 5
14 bit
Figure 1 Logic Symbol
V
AREF
V
V
AGND
DDI/P
XC164SM
V
SS
PORT1
14 bit
Port 3
15 bit
Port 9
6 bit
TRST
MCA05554_XC164SM
Data Sheet 7 V1.2, 2007-03
XC164SM
d
Derivatives
General Device Information
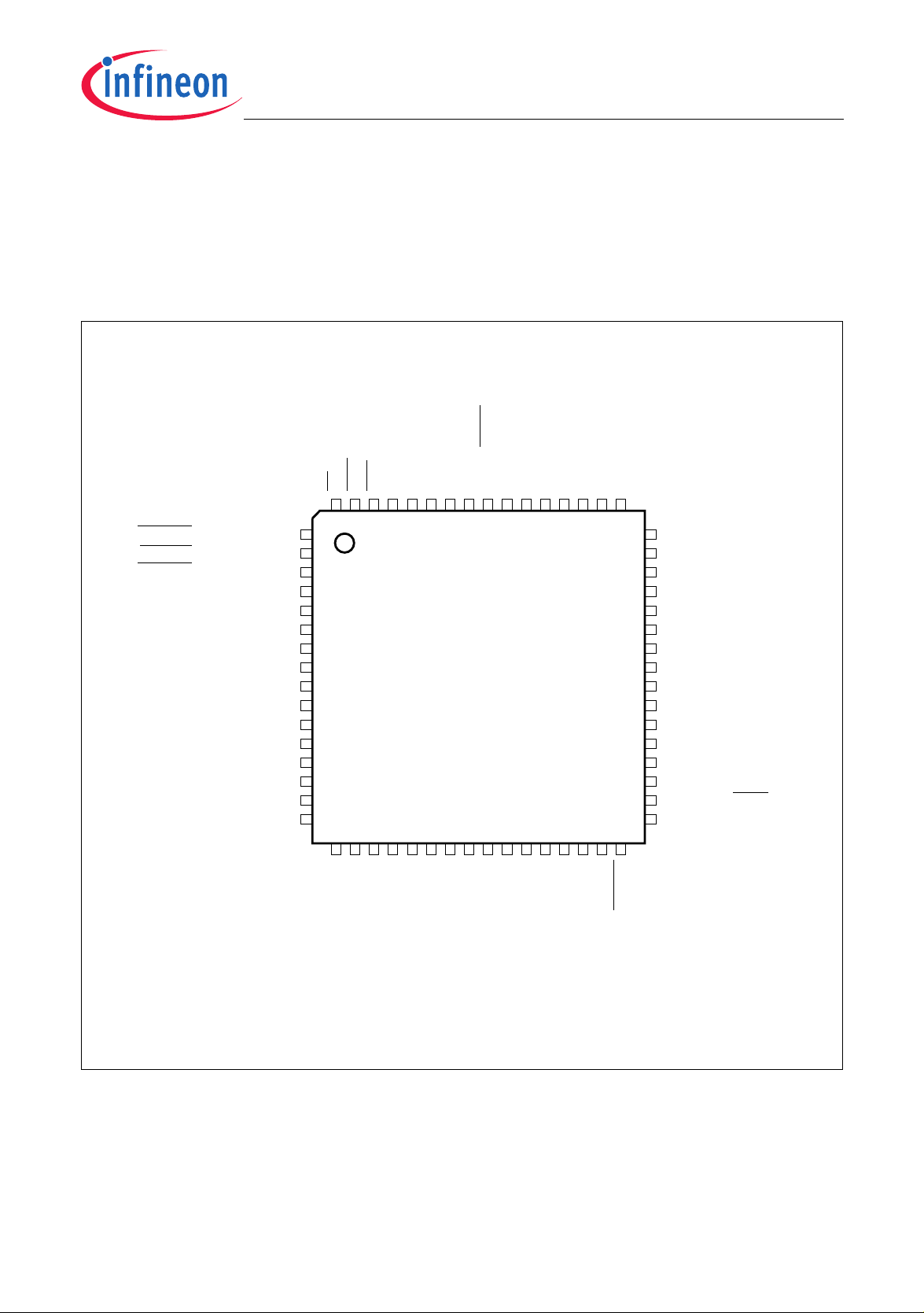
2.1 Pin Configuration and Definition
The pins of the XC164SM are described in detail in Table 2, including all their alternate
functions. Figure 2 summarizes all pins in a condensed way, showing their location on
the 4 sides of the package. E* marks pins to be used as alternate external interrupt
inputs.
P1 H. 0/ CC 6POS0 /EX0 IN /C C2 3IO
P1 H. 1/ CC 6POS1 /EX1 IN /M RST 1
P1 H. 2/ CC 6POS2 /EX2 IN /M TR S1
P1 H. 3/ EX3I N/ T7I N/ SCL K1
P1H.4/CC24IO/EX4IN
I
5
/
C
2
5
I
O
P5.0/AN0
P5.1/AN1
P5.2/AN2
P5.3/AN3
P5.4/AN4
P5.5/AN5
E
X
V
SS
V
DDP
.
5
/
C
H
1
P
P5.10/AN10/T6EUD
P5.11/AN11/T5EUD
DDPVDDIVSS
P1L.7/CTRAP/CC22IO
TRST
RSTIN
NMI
1
2
3
4
5
N
6
7
8
9
10
11
12
13
14
15
16
P5 .6 /AN 6
P5 .7 /AN 7
XTA L 1
XTA L 2
XC164SM
AR EF
AG ND
V
V
V
P1L.6/COUT63
SS
DDI
V
V
V
P1L.5/COUT62
DDP
P1L.3/COUT61
P1L.4/CC62
P1L.0/CC60
P1L.1/COUT60
P1L.2/CC61
49505152535455565758596061626364
48
P9.5/CC21IO
47
P9.4/CC20IO
46
P9.3/CC19IO
P9 .2 /C C1 8I O/E*
45
P9.1/CC17IO
44
43
P9 .0 /C C1 6I O/E*
42
P3 .1 5/C LKOUT/FOU T
V
41
SS
40
V
DDP
39
P3.13/SCLK0/E*
38
P3.11/RxD0/E*
37
P3.10/TxD0/E*
36
P3.9/MTSR0
35
P3.8/MRST0
P3 .7 /T 2I N/ BRKI N
34
33
32313029282726252423222120191817
P3.6/T3IN
P5 .12 /AN 12 /T6IN
P5 .13 /AN 13 /T5IN
P5.14/AN14/T4EUD
P5.15/AN15/T2EUD
P3.2/CAPIN/TDI
P3.3/T3OUT/TDO
P3.4/T3EUD/TMS
P3 .1 /T 6OUT/ RxD 1/ TC K/E*
P3.5/T4IN/TxD1/BRKOUT
mc_xc 164sm_pinout .vs
Figure 2 Pin Configuration (top view)
Data Sheet 8 V1.2, 2007-03
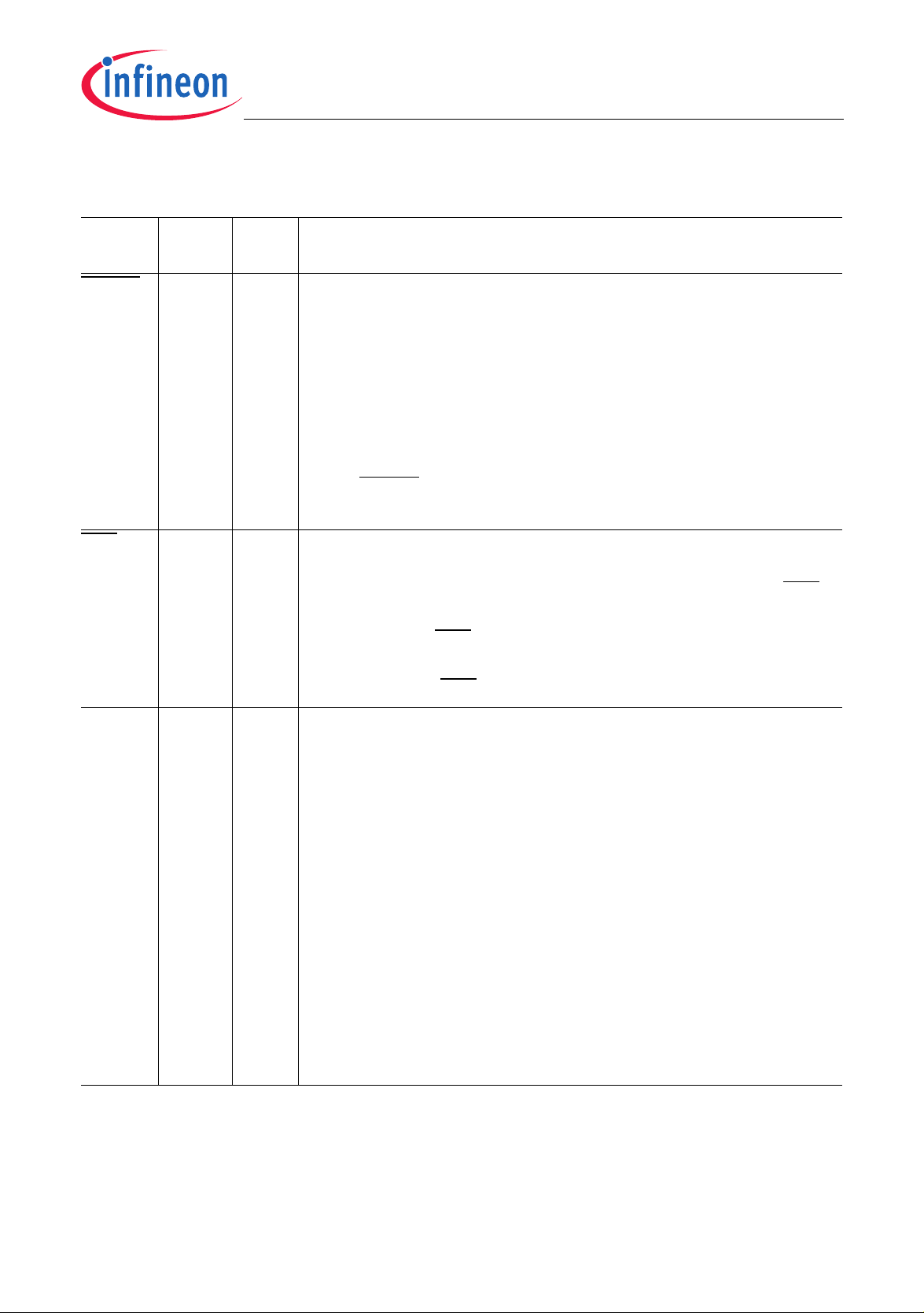
Table 2 Pin Definitions and Functions
XC164SM
Derivatives
General Device Information
Symbol
Pin
Num.
Input
Outp.
Function
RSTIN 63 I Reset Input with Schmitt-Trigger characteristics. A low-level
at this pin while the oscillator is running resets the XC164SM.
A spike filter suppresses input pulses < 10 ns. Input pulses
> 100 ns safely pass the filter. The minimum duration for a
safe recognition should be 100 ns + 2 CPU clock cycles.
Note: The reset duration must be sufficient to let the
hardware configuration signals settle.
External circuitry must guarantee low-level at the
RSTIN
pin at least until both power supply voltages
have reached the operating range.
NMI
64 I Non-Maskable Interrupt Input. A high to low transition at this
pin causes the CPU to vector to the NMI trap routine. When
the PWRDN (power down) instruction is executed, the NMI
pin must be low in order to force the XC164SM into power
down mode. If NMI
is high, when PWRDN is executed, the
part will continue to run in normal mode.
If not used, pin NMI
should be pulled high externally.
Port 9
P9.0
P9.1
P9.2
P9.3
P9.4
P9.5
43-48
43
44
45
46
47
48
IO
I/O
I
I/O
I/O
I
I/O
I/O
I/O
Port 9 is a 6-bit bidirectional I/O port. Each pin can be
programmed for input (output driver in high-impedance state)
or output (configurable as push/pull or open drain driver). The
input threshold of Port 9 is selectable (standard or special).
The following Port 9 pins also serve for alternate functions:
CC16IO: (CAPCOM2) CC16 Capture Inp./Compare Outp.,
EX5IN: (Fast External Interrupt 5) Input (alternate pin A)
CC17IO: (CAPCOM2) CC17 Capture Inp./Compare Outp.,
CC18IO: (CAPCOM2) CC18 Capture Inp./Compare Outp.,
EX4IN: (Fast External Interrupt 4) Input (alternate pin A)
CC19IO: (CAPCOM2) CC19 Capture Inp./Compare Outp.,
CC20IO: (CAPCOM2) CC20 Capture Inp./Compare Outp.
CC21IO: (CAPCOM2) CC21 Capture Inp./Compare Outp.
Note: At the end of an external reset P9.4 and P9.5 also may
input startup configuration values
Data Sheet 9 V1.2, 2007-03
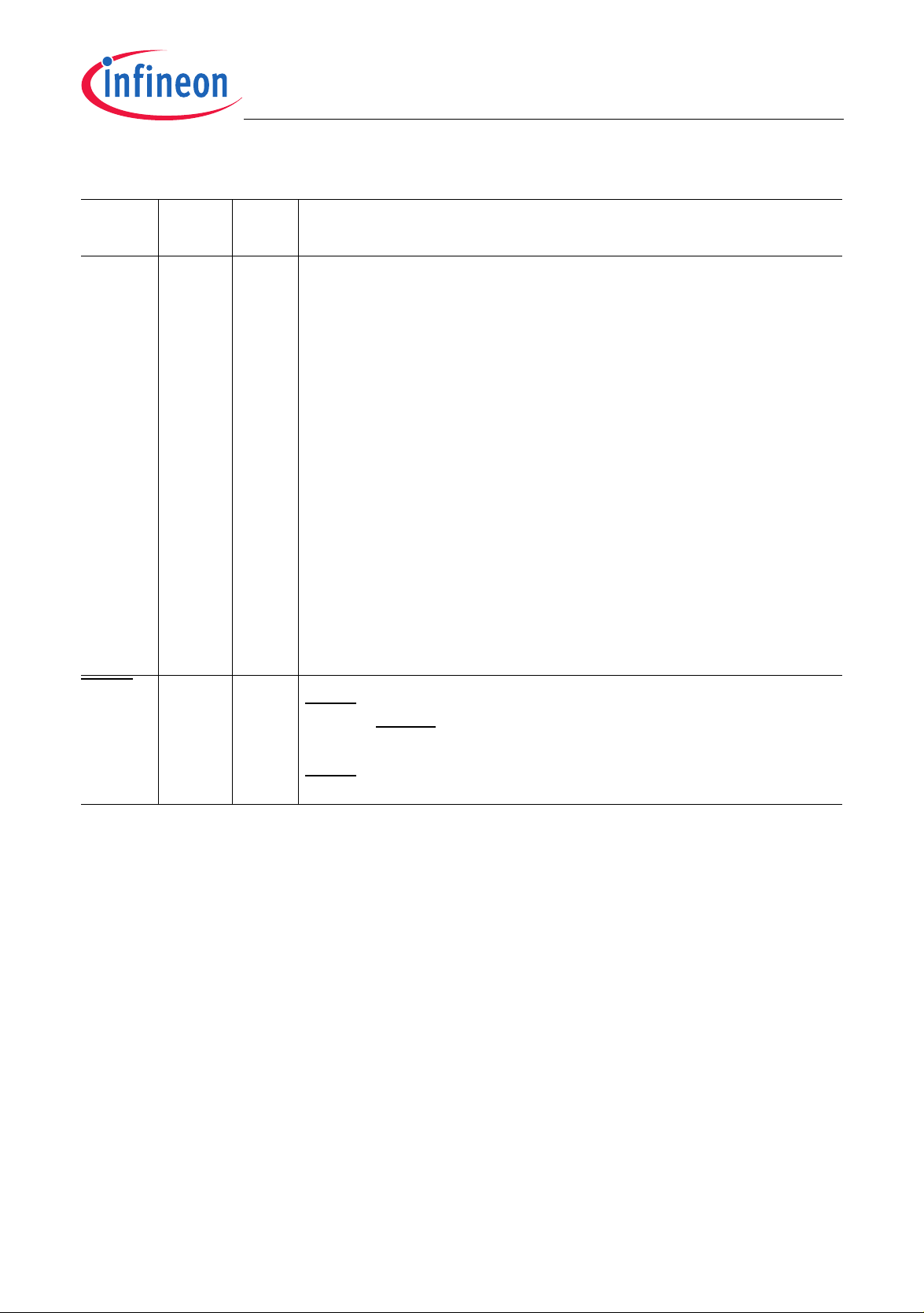
Table 2 Pin Definitions and Functions (cont’d)
XC164SM
Derivatives
General Device Information
Symbol
Port 5
P5.0
P5.1
P5.2
P5.3
P5.4
P5.5
P5.10
P5.11
P5.6
P5.7
P5.12
P5.13
P5.14
P5.15
Pin
Num.
9-18,
21-24
9
10
11
12
13
14
15
16
17
18
21
22
23
24
Input
Outp.
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Function
Port 5 is a 14-bit input-only port.
The pins of Port 5 also serve as analog input channels for the
A/D converter, or they serve as timer inputs:
AN0
AN1
AN2
AN3
AN4
AN5
AN10 (T6EUD): GPT2 Timer T6 Ext. Up/Down Ctrl. Inp.
AN11 (T5EUD): GPT2 Timer T5 Ext. Up/Down Ctrl. Inp.
AN6
AN7
AN12 (T6IN): GPT2 Timer T6 Count/Gate Input
AN13 (T5IN): GPT2 Timer T5 Count/Gate Input
AN14 (T4EUD): GPT1 Timer T4 Ext. Up/Down Ctrl. Inp.
AN15 (T2EUD): GPT1 Timer T2 Ext. Up/Down Ctrl. Inp.
TRST
62 I Test-System Reset Input. For normal system operation, pin
TRST
edge of RSTIN
should be held low. A high level at this pin at the rising
enables the hardware configuration and
activates the XC164SM’s debug system. In this case, pin
TRST
must be driven low once to reset the debug system.
Data Sheet 10 V1.2, 2007-03
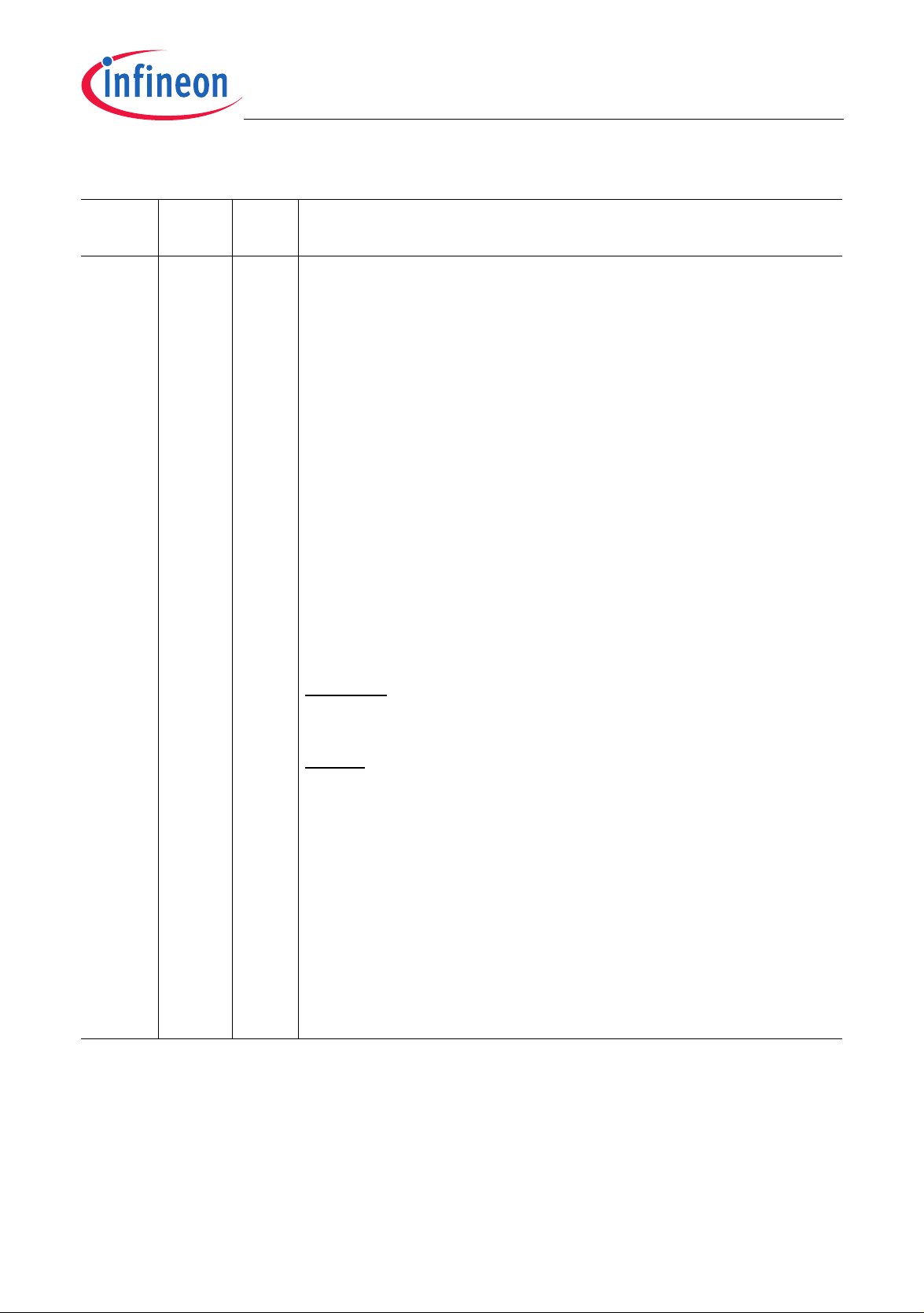
Table 2 Pin Definitions and Functions (cont’d)
XC164SM
Derivatives
General Device Information
Symbol
Port 3
P3.1
P3.2
P3.3
P3.4
P3.5
P3.6
P3.7
P3.8
P3.9
P3.10
P3.11
P3.13
P3.15
Pin
Num.
28-39,
42
28
29
30
31
32
33
34
35
36
37
38
39
42
Input
Outp.
IO
O
I/O
I
I
I
I
O
O
I
I
I
O
O
I
I
I
I/O
I/O
O
I
I/O
I
I/O
I
O
O
Function
Port 3 is a 13-bit bidirectional I/O port. Each pin can be
programmed for input (output driver in high-impedance state)
or output (configurable as push/pull or open drain driver). The
input threshold of Port 3 is selectable (standard or
special).The following Port 3 pins also serve for alternate
functions:
T6OUT: [GPT2] Timer T6 Toggle Latch Output,
RxD1: [ASC1] Data Input (Async.) or Inp./Outp. (Sync.),
EX1IN: [Fast External Interrupt 1] Input (alternate pin A),
TCK: [Debug System] JTAG Clock Input
CAPIN: [GPT2] Register CAPREL Capture Input,
TDI: [Debug System] JTAG Data In
T3OUT: [GPT1] Timer T3 Toggle Latch Output,
TDO: [Debug System] JTAG Data Out
T3EUD: [GPT1] Timer T3 External Up/Down Control Input,
TMS: [Debug System] JTAG Test Mode Selection
T4IN: [GPT1] Timer T4 Count/Gate/Reload/Capture Inp.
TxD1: [ASC0] Clock/Data Output (Async./Sync.),
BRKOUT
: [Debug System] Break Out
T3IN: [GPT1] Timer T3 Count/Gate Input
T2IN: [GPT1] Timer T2 Count/Gate/Reload/Capture Inp.
BRKIN
: [Debug System] Break In
MRST0: [SSC0] Master-Receive/Slave-Transmit In/Out.
MTSR0: [SSC0] Master-Transmit/Slave-Receive Out/In.
TxD0: [ASC0] Clock/Data Output (Async./Sync.),
EX2IN: [Fast External Interrupt 2] Input (alternate pin B)
RxD0: [ASC0] Data Input (Async.) or Inp./Outp. (Sync.),
EX2IN: [Fast External Interrupt 2] Input (alternate pin A)
SCLK0: [SSC0] Master Clock Output / Slave Clock Input.,
EX3IN: [Fast External Interrupt 3] Input (alternate pin A)
CLKOUT: System Clock Output (= CPU Clock),
FOUT: Programmable Frequency Output
Data Sheet 11 V1.2, 2007-03
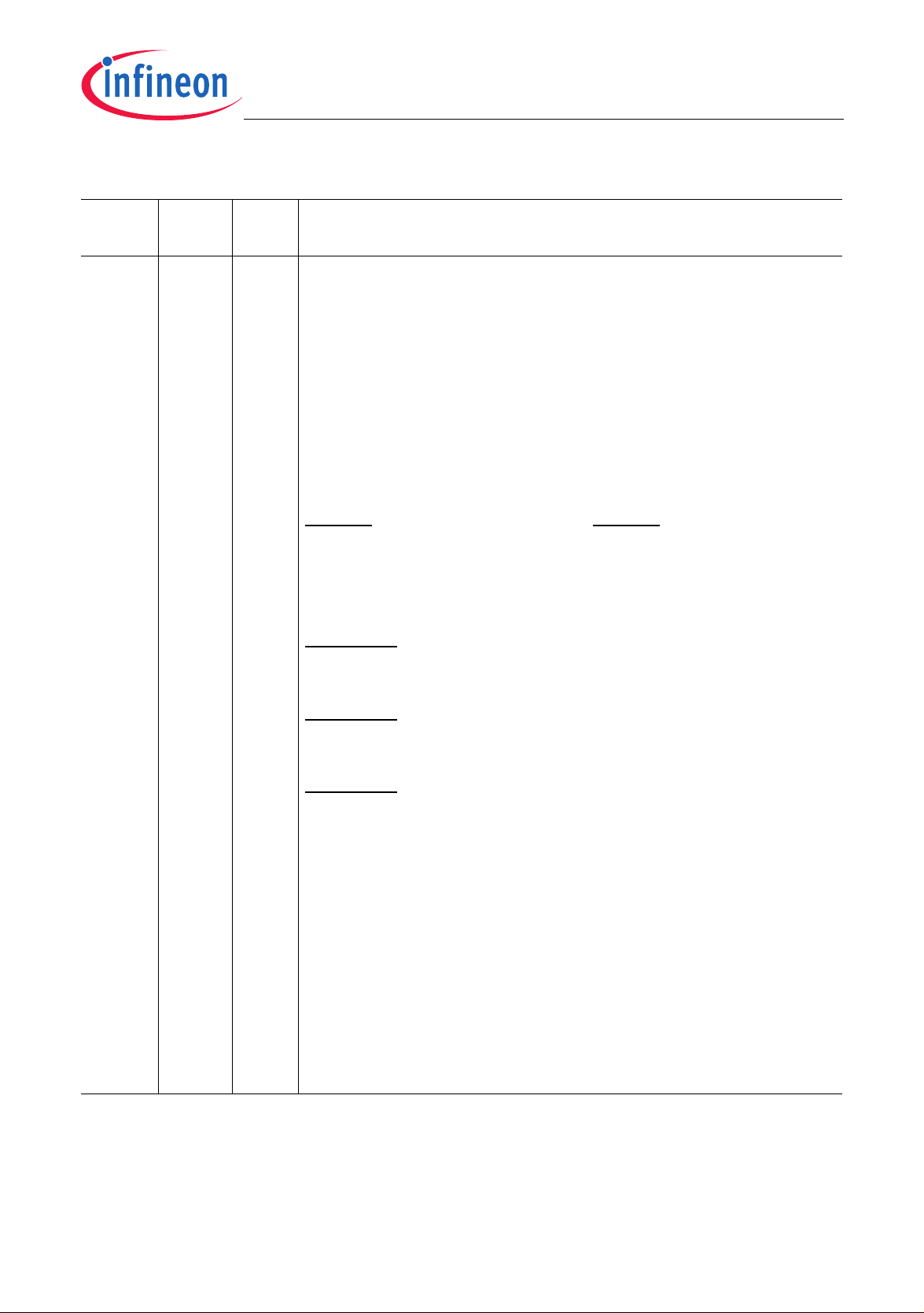
Table 2 Pin Definitions and Functions (cont’d)
XC164SM
Derivatives
General Device Information
Symbol
PORT1
P1L.0
P1L.1
P1L.2
P1L.3
P1L.4
P1L.5
P1L.6
P1L.7
P1H.0
P1H.1
P1H.2
P1H.3
P1H.4
P1H.5
Pin
Num.
1-6,
49-56
49
50
51
52
53
54
55
56
1
2
3
3
5
6
Input
Outp.
IO
I/O
O
I/O
O
I/O
O
O
I
I/O
I
I
I/O
I
I
I/O
I
I
I/O
I
I/O
I
I/O
I
I/O
I
Function
PORT1 consists of one 8-bit and one 6-bit bidirectional I/O
port P1L and P1H. Each pin can be programmed for input
(output driver in high-impedance state) or output.
The following PORT1 pins also serve for alt. functions:
CC60: [CAPCOM6] Input / Output of Channel 0
COUT60: [CAPCOM6] Output of Channel 0
CC61: [CAPCOM6] Input / Output of Channel 1
COUT61: [CAPCOM6] Output of Channel 1
CC62: [CAPCOM6] Input / Output of Channel 2
COUT62: [CAPCOM6] Output of Channel 2
COUT63: Output of 10-bit Compare Channel
CTRAP
: [CAPCOM6] Trap Input CTRAP is an input pin with
an internal pull-up resistor. A low level on this pin switches the
CAPCOM6 compare outputs to the logic level defined by
software (if enabled).
CC22IO: [CAPCOM2] CC22 Capture Inp./Compare Outp.
CC6POS0
: [CAPCOM6] Position 0 Input,
EX0IN: [Fast External Interrupt 0] Input (default pin),
CC23IO: [CAPCOM2] CC23 Capture Inp./Compare Outp.
CC6POS1
: [CAPCOM6] Position 1 Input,
EX1IN: [Fast External Interrupt 1] Input (default pin),
MRST1: [SSC1] Master-Receive/Slave-Transmit In/Out.
CC6POS2
: [CAPCOM6] Position 2 Input,
EX2IN: [Fast External Interrupt 2] Input (default pin),
MTSR1: [SSC1] Master-Transmit/Slave-Receive Out/Inp.
T7IN: [CAPCOM2] Timer T7 Count Input,
SCLK1: [SSC1] Master Clock Output / Slave Clock Input,
EX3IN: [Fast External Interrupt 3] Input (default pin),
CC24IO: [CAPCOM2] CC24 Capture Inp./Compare Outp.,
EX4IN: [Fast External Interrupt 4] Input (default pin)
CC25IO: [CAPCOM2] CC25 Capture Inp./Compare Outp.,
EX5IN: [Fast External Interrupt 5] Input (default pin)
Note: At the end of an external reset P1H.4 and P1H.5 also
may input startup configuration values
Data Sheet 12 V1.2, 2007-03
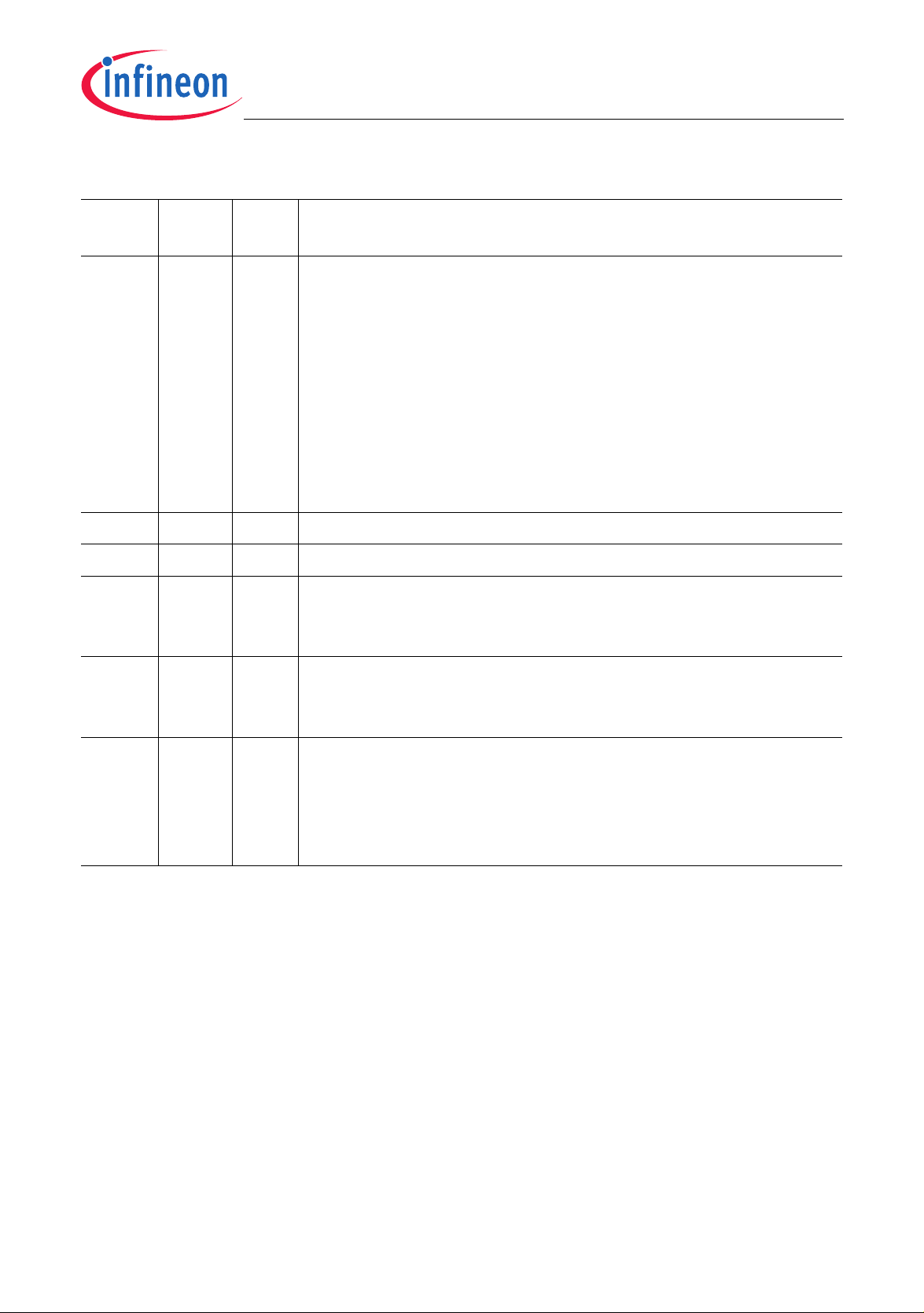
Table 2 Pin Definitions and Functions (cont’d)
XC164SM
Derivatives
General Device Information
Symbol
Pin
Num.
XTAL2
XTAL16160
V
V
V
AREF
AGND
DDI
19 – Reference voltage for the A/D converter
20 – Reference ground for the A/D converter
26, 58 – Digital Core Supply Voltage (On-Chip Modules):
Input
Outp.
O
I
Function
XTAL2: Output of the oscillator amplifier circuit
XTAL1: Input to the oscillator amplifier and input to the
internal clock generator
To clock the device from an external source, drive XTAL1,
while leaving XTAL2 unconnected. Minimum and maximum
high/low and rise/fall times specified in the AC Characteristics
must be observed.
Note: Input pin XTAL1 belongs to the core voltage domain.
Therefore, input voltages must be within the range
defined for
V
DDI
.
+2.5 V during normal operation and idle mode.
Please refer to the Operating Condition Parameters
V
V
DDP
SS
8, 27,
40, 57
7, 25,
41, 59
– Digital Pad Supply Voltage (Pin Output Drivers):
+5 V during normal operation and idle mode.
Please refer to the Operating Condition Parameters
– Digital Ground
Connect decoupling capacitors to adjacent
V
DD/VSS
as close as possible to the pins.
All
V
pins must be connected to the ground-line or ground-
SS
plane.
pin pairs
Data Sheet 13 V1.2, 2007-03
XC164SM
Derivatives
Functional Description
3 Functional Description
The architecture of the XC164SM combines advantages of RISC, CISC, and DSP
processors with an advanced peripheral subsystem in a very well-balanced way. In
addition, the on-chip memory blocks allow the design of compact systems-on-silicon with
maximum performance (computing, control, communication).
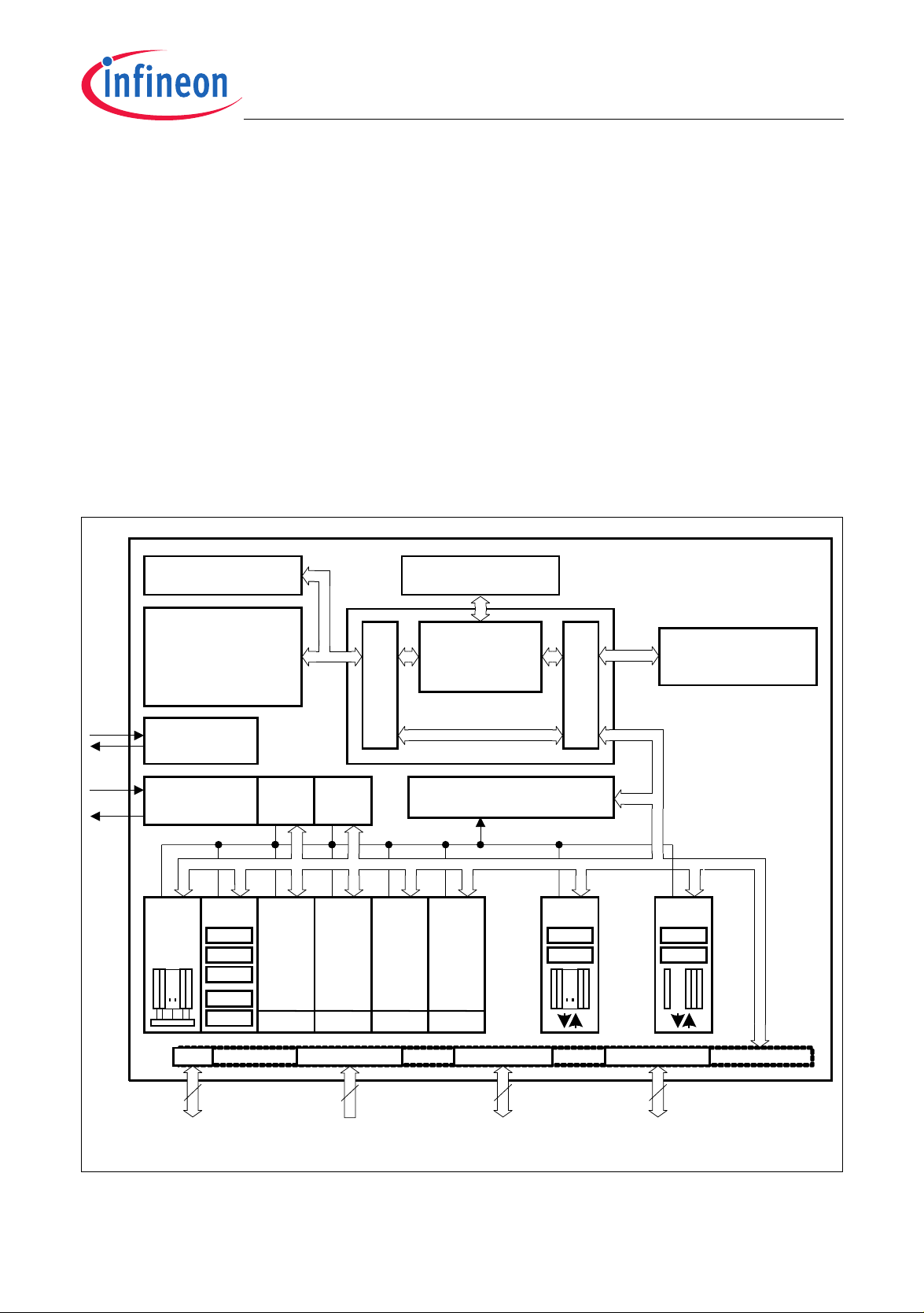
The on-chip memory blocks (program code-memory and SRAM, dual-port RAM, data
SRAM) and the set of generic peripherals are connected to the CPU via separate buses.
Another bus, the LXBus, connects additional on-chip resources (see Figure 3).
This bus structure enhances the overall system performance by enabling the concurrent
operation of several subsystems of the XC164SM.
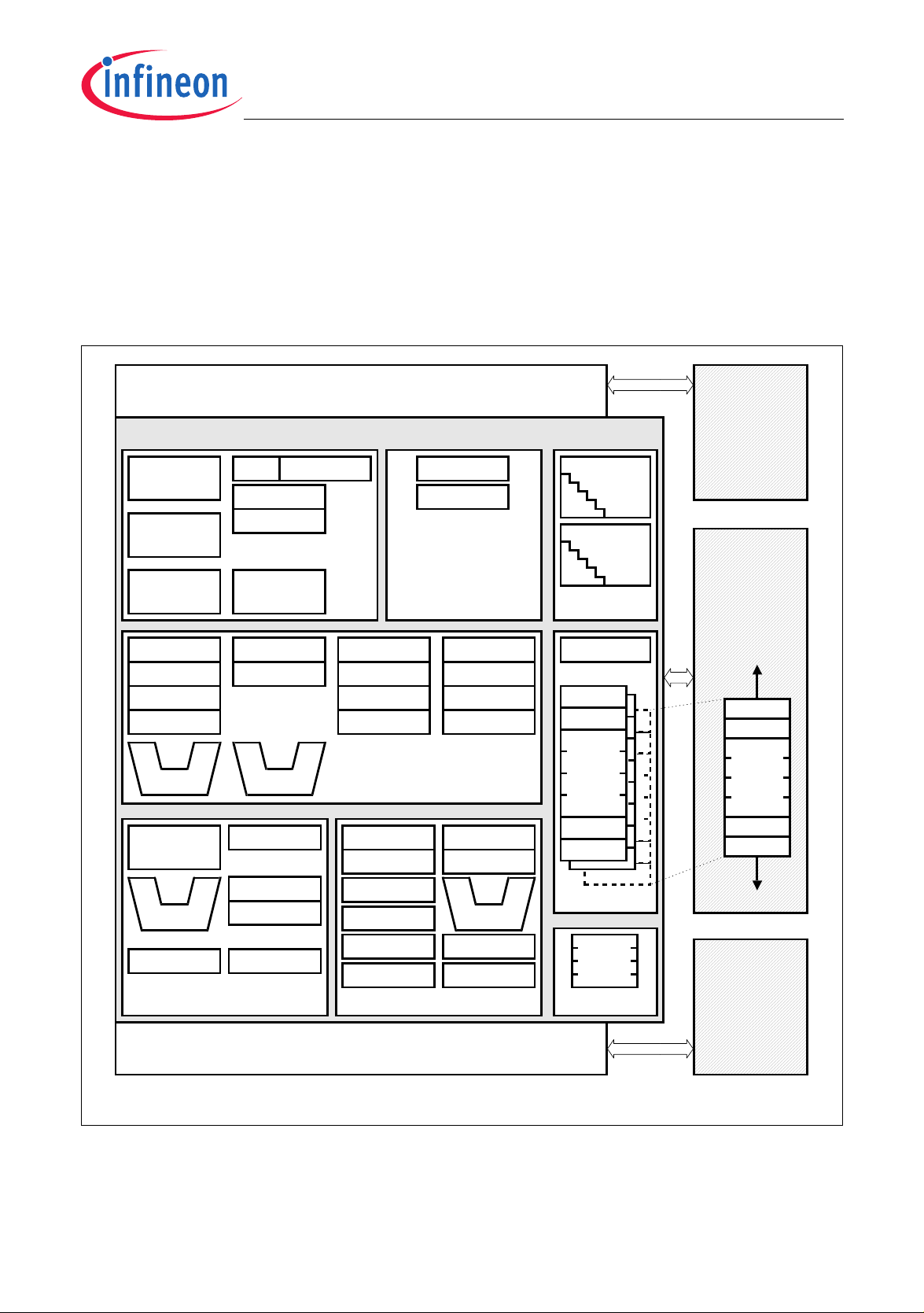
The following block diagram gives an overview of the different on-chip components and
of the advanced, high bandwidth internal bus structure of the XC164SM.
XTAL
PSRAM
2 Kbytes
ProgMem
Flash
32/64/128 Kbytes
OCDS
Debug Support
Osc / PLL
Clock Generation
ADC
8/10-Bit
C hannels
GPT
14
T2
T3
T4
T5
T6
RTC WDT
ASC0
(USART)
BRGen
ASC1
(USART)
BRGen
PMU
SSC0
(SPI)
BRGen
DPRAM
2 Kbytes
CPU
C166SV2-Core
Interrupt & PEC
SSC1
(SPI)
BRGen
DMU
Interrupt B us
P eripheral Dat a Bus
CC2
T7
T8
DSRAM
0/2/4 Kbytes
CC6
T12
T13
Port 5
6
14
13
POR T1Port 3Port 9
14
mc_xc164sm_block1.vsd
Figure 3 Block Diagram
Data Sheet 14 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.1 Memory Subsystem and Organization
The memory space of the XC164SM is configured in a von Neumann architecture, which
means that all internal and external resources, such as code memory, data memory,
registers and I/O ports, are organized within the same linear address space. This
common memory space includes 16 Mbytes and is arranged as 256 segments of
64 Kbytes each, where each segment consists of four data pages of 16 Kbytes each.
The entire memory space can be accessed byte wise or word wise. Portions of the
on-chip DPRAM and the register spaces (E/SFR) have additionally been made directly
bit addressable.
The internal data memory areas and the Special Function Register areas (SFR and
ESFR) are mapped into segment 0, the system segment.
The Program Management Unit (PMU) handles all code fetches and, therefore, controls
accesses to the program memories, such as Flash memory and PSRAM.
The Data Management Unit (DMU) handles all data transfers and, therefore, controls
accesses to the DSRAM and the on-chip peripherals.
Both units (PMU and DMU) are connected via the high-speed system bus to exchange
data. This is required if operands are read from program memory, code or data is written
to the PSRAM. The system bus allows concurrent two-way communication for maximum
transfer performance.
32/64/128 Kbytes of on-chip Flash memory
1)
store code or constant data. The on-chip
Flash memory is organized as four 8-Kbyte sectors and up to three 32-Kbyte sectors.
Each sector can be separately write protected
2)
, erased and programmed (in blocks of
128 Bytes). The complete Flash area can be read-protected. A password sequence
temporarily unlocks protected areas. The Flash module combines very fast 64-bit onecycle read accesses with protected and efficient writing algorithms for programming and
erasing. Thus, program execution out of the internal Flash results in maximum
performance. Dynamic error correction provides extremely high read data security for all
read accesses.
Programming typically takes 2 ms per 128-byte block (5 ms max.), erasing a sector
typically takes 200 ms (500 ms max.).
2 Kbytes of on-chip Program SRAM (PSRAM) are provided to store user code or data.
The PSRAM is accessed via the PMU and is therefore optimized for code fetches.
0/2/4 Kbytes
1)
of on-chip Data SRAM (DSRAM) are provided as a storage for general
user data. The DSRAM is accessed via the DMU and is therefore optimized for data
accesses. DSRAM is not available in the XC164SM-4F derivatives.
2 Kbytes of on-chip Dual-Port RAM (DPRAM) are provided as a storage for user
defined variables, for the system stack, general purpose register banks. A register bank
1) Depends on the respective derivative. See Table 1 “XC164SM Derivative Synopsis” on Page 6.
2) Each two 8-Kbyte sectors are combined for write-protection purposes.
Data Sheet 15 V1.2, 2007-03
XC164SM
Derivatives
Functional Description
can consist of up to 16 word wide (R0 to R15) and/or byte wide (RL0, RH0, …, RL7, RH7)
so-called General Purpose Registers (GPRs).
The upper 256 bytes of the DPRAM are directly bit addressable. When used by a GPR,
any location in the DPRAM is bit addressable.
1024 bytes (2 × 512 bytes) of the address space are reserved for the Special Function
Register areas (SFR space and ESFR space). SFRs are word wide registers which are
used for controlling and monitoring functions of the different on-chip units. Unused SFR
addresses are reserved for future members of the XC166 Family. Therefore, they should
either not be accessed, or written with zeros, to ensure upward compatibility.
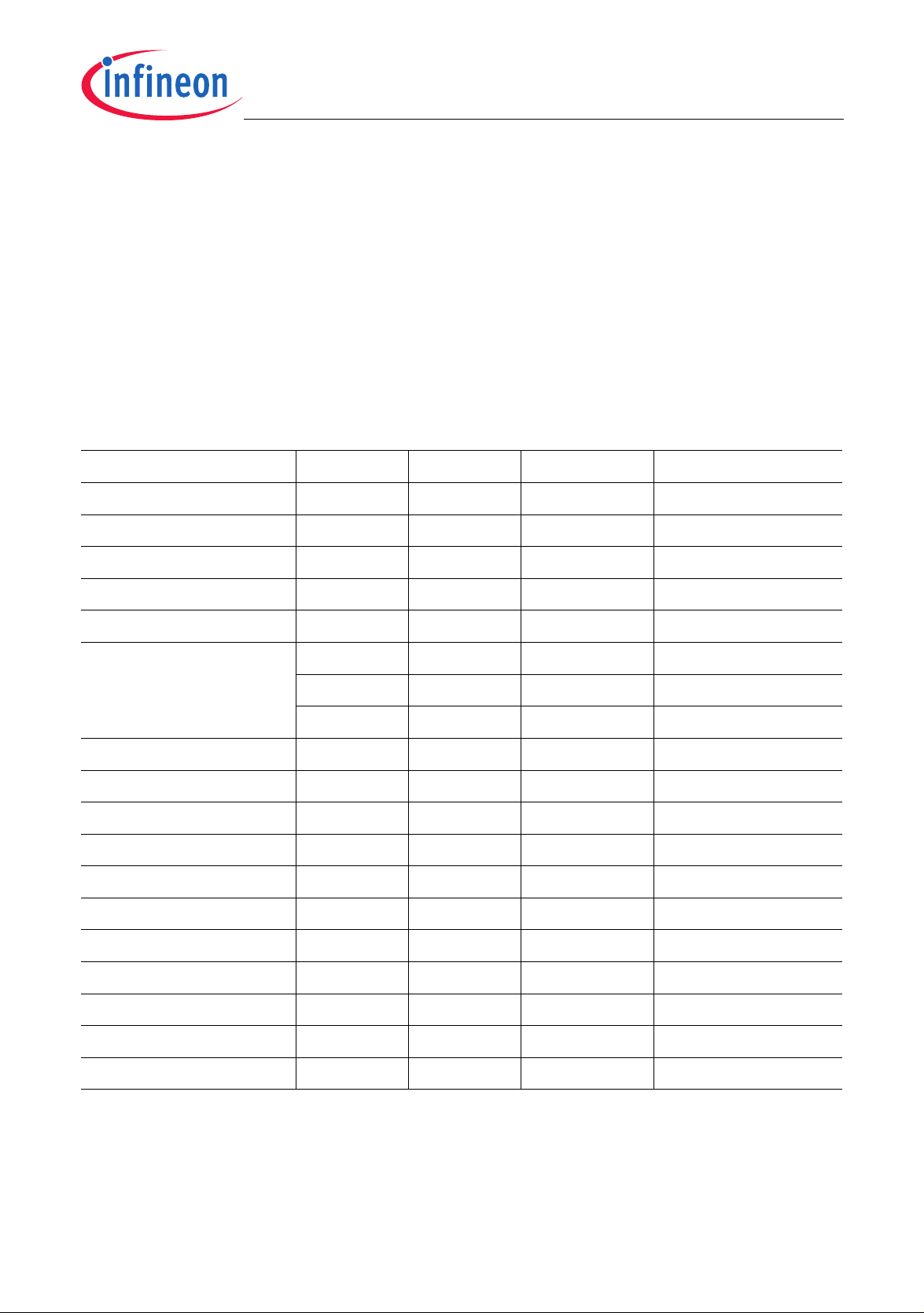
Table 3 XC164SM Memory Map
Address Area Start Loc. End Loc. Area Size
Flash register space FF’F000
H
FF’FFFF
H
4 Kbytes
1)
Notes
2)
Reserved (Acc. trap) F8’0000
Reserved for PSRAM E0’0800
Program SRAM E0’0000
Reserved for pr. mem. C2’0000
Program Flash C0’0000
C0’0000
C0’0000
Reserved 20’0000
Reserved 01’0000
SFR area 00’FE00
Dual-Port RAM 00’F600
Reserved for DPRAM 00’F200
ESFR area 00’F000
XSFR area 00’E000
Reserved 00’D000
Data SRAM 00’C000
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
FF’FFFF
F7’FFFF
E0’07FF
DF’FFFF
C1’FFFF
C0’FFFF
C0’7FFF
BF’FFFF
1F’FFFF
00’FFFF
00’FDFF
00’F5FF
00’F1FF
00’EFFF
00’DFFF
00’CFFF
508 Kbytes –
H
< 1.5 Mbytes Minus PSRAM
H
2 Kbytes –
H
< 2 Mbytes Minus Flash
H
128 Kbytes XC164SM-16F
H
64 Kbytes XC164SM-8F
H
32 Kbytes XC164SM-4F
H
< 10 Mbytes
H
< 2 Mbytes Minus segment 0
H
0.5 Kbyte –
H
2 Kbytes –
H
1 Kbyte –
H
0.5 Kbyte –
H
4 Kbytes –
H
6 Kbytes –
H
H
4 Kbytes
3)
Reserved for DSRAM 00’8000
Reserved 00’0000
1) The areas marked with “<” are slightly smaller than indicated, see column “Notes”.
2) Not defined register locations return a trap code (1E9BH).
3) Depends on the respective derivative. See Table 1 “XC164SM Derivative Synopsis” on Page 6.
H
H
00’BFFF
00’7FFF
16 Kbytes –
H
32 Kbytes –
H
Data Sheet 16 V1.2, 2007-03
XC164SM
Derivatives
Functional Description
3.2 Central Processing Unit (CPU)
The main core of the CPU consists of a 5-stage execution pipeline with a 2-stage
instruction-fetch pipeline, a 16-bit arithmetic and logic unit (ALU), a 32-bit/40-bit multiply
and accumulate unit (MAC), a register-file providing three register banks, and dedicated
SFRs. The ALU features a multiply and divide unit, a bit-mask generator, and a barrel
shifter.
CPU
Prefetch
Branch
Multiply
Unit
Unit
FIFO
IDX0
IDX1
QX0
QX1
+/-
Unit
+/-
CSP IP
CPUCON1
CPUCON2
Return
Stack
QR0
QR1
+/-
MRW
MCW
MSW
IFU
DPP0
DPP1
DPP2
DPP3
Division Unit
M u ltiply U n it
MDC
PSW
VECSEG
TFR
Injection/
Exception
Handler
SPSEG
SP
STKOV
STKUN
Bit-Mask-Gen.
Barrel-Shifter
+/-
ADU
PMU
2-Stage
5-Stage
R15
R14
GPRs
GPRs
RF
Prefetch
Pipeline
Pipeline
CP
R15
R15
R14
R14
GPRs
R1
R1
R0
R1
R0
R0
PSRAM
Flash/ROM
DPRAM
IPIP
R15
R14
GPRs
R1
R0
MAC
MAH
MAL
MDH
ZEROS
MDL
ONES
ALU
Buffer
DMU
WB
DSRAM
EBC
Peripherals
mca04917_x.vsd
Figure 4 CPU Block Diagram
Based on these hardware provisions, most of the XC164SM’s instructions can be
executed in just one machine cycle which requires 25 ns at 40 MHz CPU clock. For
Data Sheet 17 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
example, shift and rotate instructions are always processed during one machine cycle
independent of the number of bits to be shifted. Also multiplication and most MAC
instructions execute in one single cycle. All multiple-cycle instructions have been
optimized so that they can be executed very fast as well: for example, a 32-/16-bit
division is started within 4 cycles, while the remaining 15 cycles are executed in the
background. Another pipeline optimization, the branch target prediction, allows
eliminating the execution time of branch instructions if the prediction was correct.
The CPU has a register context consisting of up to three register banks with 16 word
wide GPRs each at its disposal. One of these register banks is physically allocated within
the on-chip DPRAM area. A Context Pointer (CP) register determines the base address
of the active register bank to be accessed by the CPU at any time. The number of
register banks is only restricted by the available internal RAM space. For easy parameter
passing, a register bank may overlap others.
A system stack of up to 32 Kwords is provided as a storage for temporary data. The
system stack can be allocated to any location within the address space (preferably in the
on-chip RAM area), and it is accessed by the CPU via the stack pointer (SP) register.
Two separate SFRs, STKOV and STKUN, are implicitly compared against the stack
pointer value upon each stack access for the detection of a stack overflow or underflow.
The high performance offered by the hardware implementation of the CPU can efficiently
be utilized by a programmer via the highly efficient XC164SM instruction set which
includes the following instruction classes:
• Standard Arithmetic Instructions
• DSP-Oriented Arithmetic Instructions
• Logical Instructions
• Boolean Bit Manipulation Instructions
• Compare and Loop Control Instructions
• Shift and Rotate Instructions
• Prioritize Instruction
• Data Movement Instructions
• System Stack Instructions
• Jump and Call Instructions
• Return Instructions
• System Control Instructions
• Miscellaneous Instructions
The basic instruction length is either 2 or 4 bytes. Possible operand types are bits, bytes
and words. A variety of direct, indirect or immediate addressing modes are provided to
specify the required operands.
Data Sheet 18 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.3 Interrupt System
With an interrupt response time of typically 8 CPU clocks (in case of internal program
execution), the XC164SM is capable of reacting very fast to the occurrence of nondeterministic events.
The architecture of the XC164SM supports several mechanisms for fast and flexible
response to service requests that can be generated from various sources internal or
external to the microcontroller. Any of these interrupt requests can be programmed to
being serviced by the Interrupt Controller or by the Peripheral Event Controller (PEC).
In contrast to a standard interrupt service where the current program execution is
suspended and a branch to the interrupt vector table is performed, just one cycle is
‘stolen’ from the current CPU activity to perform a PEC service. A PEC service implies a
single byte or word data transfer between any two memory locations with an additional
increment of either the PEC source, or the destination pointer, or both. An individual PEC
transfer counter is implicitly decremented for each PEC service except when performing
in the continuous transfer mode. When this counter reaches zero, a standard interrupt is
performed to the corresponding source related vector location. PEC services are very
well suited, for example, for supporting the transmission or reception of blocks of data.
The XC164SM has 8 PEC channels each of which offers such fast interrupt-driven data
transfer capabilities.
A separate control register which contains an interrupt request flag, an interrupt enable
flag and an interrupt priority bit field exists for each of the possible interrupt nodes. Via
its related register, each node can be programmed to one of sixteen interrupt priority
levels. Once having been accepted by the CPU, an interrupt service can only be
interrupted by a higher prioritized service request. For the standard interrupt processing,
each of the possible interrupt nodes has a dedicated vector location.
Fast external interrupt inputs are provided to service external interrupts with high
precision requirements. These fast interrupt inputs feature programmable edge
detection (rising edge, falling edge, or both edges).
Software interrupts are supported by means of the ‘TRAP’ instruction in combination with
an individual trap (interrupt) number.
Table 4 shows all of the possible XC164SM interrupt sources and the corresponding
hardware-related interrupt flags, vectors, vector locations and trap (interrupt) numbers.
Note: Interrupt nodes which are not assigned to peripherals (unassigned nodes), may
be used to generate software controlled interrupt requests by setting the
respective interrupt request bit (xIR).
Data Sheet 19 V1.2, 2007-03

Table 4 XC164SM Interrupt Nodes
XC164SM
Derivatives
Functional Description
Source of Interrupt or PEC
Service Request
Control
Register
Vector
Location
EX0IN CC1_CC8IC xx’0060
EX1IN CC1_CC9IC xx’0064
EX2IN CC1_CC10IC xx’0068
EX3IN CC1_CC11IC xx’006C
EX4IN CC1_CC12IC xx’0070
EX5IN CC1_CC13IC xx’0074
CAPCOM Register 16 CC2_CC16IC xx’00C0
CAPCOM Register 17 CC2_CC17IC xx’00C4
CAPCOM Register 18 CC2_CC18IC xx’00C8
CAPCOM Register 19 CC2_CC19IC xx’00CC
CAPCOM Register 20 CC2_CC20IC xx’00D0
CAPCOM Register 21 CC2_CC21IC xx’00D4
CAPCOM Register 22 CC2_CC22IC xx’00D8
Trap
1)
H
H
H
H
H
H
H
H
H
H
H
H
H
Number
18H / 24
19H / 25
1AH / 26
1BH / 27
1CH / 28
1DH / 29
30H / 48
31H / 49
32H / 50
33H / 51
34H / 52
35H / 53
36H / 54
D
D
D
D
D
D
D
D
D
D
D
D
D
CAPCOM Register 23 CC2_CC23IC xx’00DC
CAPCOM Register 24 CC2_CC24IC xx’00E0
CAPCOM Register 25 CC2_CC25IC xx’00E4
CAPCOM Register 26 CC2_CC26IC xx’00E8
CAPCOM Register 27 CC2_CC27IC xx’00EC
CAPCOM Register 28 CC2_CC28IC xx’00F0
CAPCOM Register 29 CC2_CC29IC xx’0110
CAPCOM Register 30 CC2_CC30IC xx’0114
CAPCOM Register 31 CC2_CC31IC xx’0118
CAPCOM Timer 7 CC2_T7IC xx’00F4
CAPCOM Timer 8 CC2_T8IC xx’00F8
GPT1 Timer 2 GPT12E_T2IC xx’0088
GPT1 Timer 3 GPT12E_T3IC xx’008C
GPT1 Timer 4 GPT12E_T4IC xx’0090
GPT2 Timer 5 GPT12E_T5IC xx’0094
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
37H / 55
38H / 56
39H / 57
3AH / 58
3BH / 59
3CH / 60
44H / 68
45H / 69
46H / 70
3DH / 61
3EH / 62
22H / 34
23H / 35
24H / 36
25H / 37
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
GPT2 Timer 6 GPT12E_T6IC xx’0098
H
26H / 38
D
Data Sheet 20 V1.2, 2007-03

Table 4 XC164SM Interrupt Nodes (cont’d)
XC164SM
Derivatives
Functional Description
Source of Interrupt or PEC
Service Request
Control
Register
Vector
Location
GPT2 CAPREL Register GPT12E_CRIC xx’009C
A/D Conversion Complete ADC_CIC xx’00A0
A/D Overrun Error ADC_EIC xx’00A4
ASC0 Transmit ASC0_TIC xx’00A8
ASC0 Transmit Buffer ASC0_TBIC xx’011C
ASC0 Receive ASC0_RIC xx’00AC
ASC0 Error ASC0_EIC xx’00B0
ASC0 Autobaud ASC0_ABIC xx’017C
SSC0 Transmit SSC0_TIC xx’00B4
SSC0 Receive SSC0_RIC xx’00B8
SSC0 Error SSC0_EIC xx’00BC
PLL/OWD PLLIC xx’010C
ASC1 Transmit ASC1_TIC xx’0120
Trap
1)
H
H
H
H
H
H
H
H
H
H
H
H
H
Number
27H / 39
28H / 40
29H / 41
2AH / 42
47H / 71
2BH / 43
2CH / 44
5FH / 95
2DH / 45
2EH / 46
2FH / 47
43H / 67
48H / 72
D
D
D
D
D
D
D
D
D
D
D
D
D
ASC1 Transmit Buffer ASC1_TBIC xx’0178
ASC1 Receive ASC1_RIC xx’0124
ASC1 Error ASC1_EIC xx’0128
ASC1 Autobaud ASC1_ABIC xx’0108
End of PEC Subchannel EOPIC xx’0130
CAPCOM6 Timer T12 CCU6_T12IC xx’0134
CAPCOM6 Timer T13 CCU6_T13IC xx’0138
CAPCOM6 Emergency CCU6_EIC xx’013C
CAPCOM6 CCU6_IC xx’0140
SSC1 Transmit SSC1_TIC xx’0144
SSC1 Receive SSC1_RIC xx’0148
SSC1 Error SSC1_EIC xx’014C
RTC RTC_IC xx’0174
Unassigned node – xx’0040
Unassigned node – xx’0044
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
5EH / 94
49H / 73
4AH / 74
42H / 66
4CH / 76
4DH / 77
4EH / 78
4FH / 79
50H / 80
51H / 81
52H / 82
53H / 83
5DH / 93
10H / 16
11H / 17
D
D
D
D
D
D
D
D
D
D
D
D
D
D
D
Unassigned node – xx’0048
Unassigned node – xx’004C
H
H
12H / 18
13H / 19
D
D
Data Sheet 21 V1.2, 2007-03

Table 4 XC164SM Interrupt Nodes (cont’d)
XC164SM
Derivatives
Functional Description
Source of Interrupt or PEC
Service Request
Control
Register
Vector
Location
Unassigned node – xx’0050
Unassigned node – xx’0054
Unassigned node – xx’0058
Unassigned node – xx’005C
Unassigned node – xx’0078
Unassigned node – xx’007C
Unassigned node – xx’0080
Unassigned node – xx’0084
Unassigned node – xx’00FC
Unassigned node – xx’0100
Unassigned node – xx’0104
Unassigned node – xx’012C
Unassigned node – xx’0150
Trap
1)
H
H
H
H
H
H
H
H
H
H
H
H
H
Number
14H / 20
15H / 21
16H / 22
17H / 23
1EH / 30
1FH / 31
20H / 32
21H / 33
3FH / 63
40H / 64
41H / 65
4BH / 75
54H / 84
D
D
D
D
D
D
D
D
D
D
D
D
D
Unassigned node – xx’0154
Unassigned node – xx’0158
Unassigned node – xx’015C
Unassigned node – xx’0160
Unassigned node – xx’0164
Unassigned node – xx’0168
Unassigned node – xx’016C
Unassigned node – xx’0170
1) Register VECSEG defines the segment where the vector table is located to.
Bitfield VECSC in register CPUCON1 defines the distance between two adjacent vectors. This table
represents the default setting, with a distance of 4 (two words) between two vectors.
H
H
H
H
H
H
H
H
55H / 85
56H / 86
57H / 87
58H / 88
59H / 89
5AH / 90
5BH / 91
5CH / 92
D
D
D
D
D
D
D
D
Data Sheet 22 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
The XC164SM also provides an excellent mechanism to identify and to process
exceptions or error conditions that arise during run-time, so-called ‘Hardware Traps’.
Hardware traps cause immediate non-maskable system reaction which is similar to a
standard interrupt service (branching to a dedicated vector table location). The
occurrence of a hardware trap is additionally signified by an individual bit in the trap flag
register (TFR). Except when another higher prioritized trap service is in progress, a
hardware trap will interrupt any actual program execution. In turn, hardware trap services
can normally not be interrupted by standard or PEC interrupts.
Table 5 shows all of the possible exceptions or error conditions that can arise during run-
time:
Table 5 Hardware Trap Summary
Exception Condition Trap
Flag
Reset Functions:
–
• Hardware Reset
• Software Reset
• W-dog Timer Overflow
Class A Hardware Traps:
• Non-Maskable Interrupt
• Stack Overflow
• Stack Underflow
• Software Break
NMI
STKOF
STKUF
SOFTBRK
Class B Hardware Traps:
• Undefined Opcode
• PMI Access Error
• Protected Instruction
UNDOPC
PACER
PRTFLT
Fault
• Illegal Word Operand
ILLOPA
Access
Trap
Vector
RESET
RESET
RESET
NMITRAP
STOTRAP
STUTRAP
SBRKTRAP
BTRAP
BTRAP
BTRAP
BTRAP
Vector
Location
xx’0000
xx’0000
xx’0000
xx’0008
xx’0010
xx’0018
xx’0020
xx’0028
xx’0028
xx’0028
xx’0028
H
H
H
H
H
H
H
H
H
H
H
Trap
1)
Number
00
00
00
02
04
06
08
0A
0A
0A
0A
Trap
Priority
H
H
H
H
H
H
H
H
H
H
H
III
III
III
II
II
II
II
I
I
I
I
Reserved – – [2C
Software Traps
–– Any
• TRAP Instruction
- 3CH][0BH -
H
[xx’0000
xx’01FC
H
H
]
0F
Any
[00
7F
–
]
H
Current
-
H
]
H
CPU
Priority
in steps of
4
H
1) Register VECSEG defines the segment where the vector table is located to.
Bitfield VECSC in register CPUCON1 defines the distance between two adjacent vectors. This table
represents the default setting, with a distance of 4 (two words) between two vectors.
Data Sheet 23 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.4 On-Chip Debug Support (OCDS)
The On-Chip Debug Support system provides a broad range of debug and emulation
features built into the XC164SM. The user software running on the XC164SM can thus
be debugged within the target system environment.
The OCDS is controlled by an external debugging device via the debug interface,
consisting of the IEEE-1149-conforming JTAG port and a break interface. The debugger
controls the OCDS via a set of dedicated registers accessible via the JTAG interface.
Additionally, the OCDS system can be controlled by the CPU, e.g. by a monitor program.
An injection interface allows the execution of OCDS-generated instructions by the CPU.
Multiple breakpoints can be triggered by on-chip hardware, by software, or by an
external trigger input. Single stepping is supported as well as the injection of arbitrary
instructions and read/write access to the complete internal address space. A breakpoint
trigger can be answered with a CPU-halt, a monitor call, a data transfer, or/and the
activation of an external signal.
Tracing data can be obtained via the JTAG interface.
The debug interface uses a set of 6 interface signals (4 JTAG lines, 2 break lines) to
communicate with external circuitry. These interface signals are realized as alternate
functions on Port 3 pins.
Data Sheet 24 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.5 Capture/Compare Unit (CAPCOM2)
The CAPCOM unit supports generation and control of timing sequences on up to
16 channels with a maximum resolution of 1 system clock cycle (8 cycles in staggered
mode). The CAPCOM unit is typically used to handle high speed I/O tasks such as pulse
and waveform generation, pulse width modulation (PWM), Digital to Analog (D/A)
conversion, software timing, or time recording relative to external events.
Two 16-bit timers (T7/T8) with reload registers provide two independent time bases for
the capture/compare register array.
The input clock for the timers is programmable to several prescaled values of the internal
system clock, or may be derived from an overflow/underflow of timer T6 in module GPT2.
This provides a wide range of variation for the timer period and resolution and allows
precise adjustments to the application specific requirements. In addition, an external
count input for CAPCOM timer T7 allows event scheduling for the capture/compare
registers relative to external events.
The capture/compare register array contains 16 dual purpose capture/compare
registers, each of which may be individually allocated to either CAPCOM timer (T7 or T8,
respectively), and programmed for capture or compare function.
10 registers of the CAPCOM2 module have each one port pin associated with it which
serves as an input pin for triggering the capture function, or as an output pin to indicate
the occurrence of a compare event.
Table 6 Compare Modes (CAPCOM2)
Compare Modes Function
Mode 0 Interrupt-only compare mode;
Several compare interrupts per timer period are possible
Mode 1 Pin toggles on each compare match;
Several compare events per timer period are possible
Mode 2 Interrupt-only compare mode;
Only one compare interrupt per timer period is generated
Mode 3 Pin set ‘1’ on match; pin reset ‘0’ on compare timer overflow;
Only one compare event per timer period is generated
Double Register
Mode
Single Event Mode Generates single edges or pulses;
When a capture/compare register has been selected for capture mode, the current
contents of the allocated timer will be latched (‘captured’) into the capture/compare
Data Sheet 25 V1.2, 2007-03
Two registers operate on one pin;
Pin toggles on each compare match;
Several compare events per timer period are possible
Can be used with any compare mode

XC164SM
Derivatives
Functional Description
register in response to an external event at the port pin which is associated with this
register. In addition, a specific interrupt request for this capture/compare register is
generated. Either a positive, a negative, or both a positive and a negative external signal
transition at the pin can be selected as the triggering event.
The contents of all registers which have been selected for one of the five compare modes
are continuously compared with the contents of the allocated timers.
When a match occurs between the timer value and the value in a capture/compare
register, specific actions will be taken based on the selected compare mode.
Data Sheet 26 V1.2, 2007-03

f
f
Reload Reg.
T7REL
XC164SM
Derivatives
Functional Description
CC
T7IN
T6OUF
CCxIO
CCxIO
T7
Input
Control
Mode
Control
(Capture
or
Compare)
Timer T7
Sixteen
16-bit
Capture/
Compare
Registers
T7IRQ
CCxIRQ
CCxIRQ
CCxIO
CC
T6OUF
T8
Input
Control
Timer T8
CCxIRQ
T8IRQ
Reload Reg.
T8REL
CAPCOM2 provides channels x = 16 … 31.
(see signals CCxIO and CCxIRQ)
Figure 5 CAPCOM2 Unit Block Diagram
Data Sheet 27 V1.2, 2007-03
MCB05569_2

XC164SM
Derivatives
Functional Description
3.6 The Capture/Compare Unit CAPCOM6
The CAPCOM6 unit supports generation and control of timing sequences on up to three
16-bit capture/compare channels plus one independent 10-bit compare channel.
In compare mode the CAPCOM6 unit provides two output signals per channel which
have inverted polarity and non-overlapping pulse transitions (deadtime control). The
compare channel can generate a single PWM output signal and is further used to
modulate the capture/compare output signals.
In capture mode the contents of compare timer T12 is stored in the capture registers
upon a signal transition at pins CCx.
Compare timers T12 (16-bit) and T13 (10-bit) are free running timers which are clocked
by the prescaled system clock.
f
f
CPU
CPU
Period Register
T12P
Offset Register
T12OF
Compare
Timer T12
Prescaler
Prescaler
16-bit
Control Register
CTCON
Compare
Timer T13
10-bit
Period Register
T13P
Mode
Select Register
CC6MSEL
CC Channel 0
CC60
CC Channel 1
Control
CC61
CC Channel 2
CC62
Compare Register
CMP13
Trap Register
Port
Control
Logic
Block
Commutation
Control
CC6MCON.H
CTRAP
CC60
COUT60
CC61
COUT61
CC62
COUT62
COUT63
CC6POS0
CC6POS1
CC6POS2
The timer registers (T12, T13) are not directly accessible.
The period and offset registers are loading a value into the timer registers.
MCB04109
Figure 6 CAPCOM6 Block Diagram
For motor control applications both subunits may generate versatile multichannel PWM
signals which are basically either controlled by compare timer T12 or by a typical hall
sensor pattern at the interrupt inputs (block commutation).
Data Sheet 28 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.7 General Purpose Timer (GPT12E) Unit
The GPT12E unit represents a very flexible multifunctional timer/counter structure which
may be used for many different time related tasks such as event timing and counting,
pulse width and duty cycle measurements, pulse generation, or pulse multiplication.
The GPT12E unit incorporates five 16-bit timers which are organized in two separate
modules, GPT1 and GPT2. Each timer in each module may operate independently in a
number of different modes, or may be concatenated with another timer of the same
module.
Each of the three timers T2, T3, T4 of module GPT1 can be configured individually for
one of four basic modes of operation, which are Timer, Gated Timer, Counter, and
Incremental Interface Mode. In Timer Mode, the input clock for a timer is derived from
the system clock, divided by a programmable prescaler, while Counter Mode allows a
timer to be clocked in reference to external events.
Pulse width or duty cycle measurement is supported in Gated Timer Mode, where the
operation of a timer is controlled by the ‘gate’ level on an external input pin. For these
purposes, each timer has one associated port pin (TxIN) which serves as gate or clock
input. The maximum resolution of the timers in module GPT1 is 4 system clock cycles.
The count direction (up/down) for each timer is programmable by software or may
additionally be altered dynamically by an external signal on a port pin (TxEUD) to
facilitate e.g. position tracking.
In Incremental Interface Mode the GPT1 timers (T2, T3, T4) can be directly connected
to the incremental position sensor signals A and B via their respective inputs TxIN and
TxEUD. Direction and count signals are internally derived from these two input signals,
so the contents of the respective timer Tx corresponds to the sensor position. The third
position sensor signal TOP0 can be connected to an interrupt input.
Timer T3 has an output toggle latch (T3OTL) which changes its state on each timer
overflow/underflow. The state of this latch may be output on pin T3OUT e.g. for time out
monitoring of external hardware components. It may also be used internally to clock
timers T2 and T4 for measuring long time periods with high resolution.
In addition to their basic operating modes, timers T2 and T4 may be configured as reload
or capture registers for timer T3. When used as capture or reload registers, timers T2
and T4 are stopped. The contents of timer T3 is captured into T2 or T4 in response to a
signal at their associated input pins (TxIN). Timer T3 is reloaded with the contents of T2
or T4 triggered either by an external signal or by a selectable state transition of its toggle
latch T3OTL. When both T2 and T4 are configured to alternately reload T3 on opposite
state transitions of T3OTL with the low and high times of a PWM signal, this signal can
be constantly generated without software intervention.
Data Sheet 29 V1.2, 2007-03

f
T3CON.BPS1
XC164SM
Derivatives
Functional Description
GPT
2n:1
Basic Clock
Interrupt
T2IN
T2EUD
T2
Mode
Control
Aux. Timer T2
U/D
Reload
Request
(T2IRQ)
Capture
Interrupt
Request
(T3IRQ)
T3
T3IN
T3EUD
Mode
Control
Core Timer T3
U/D
T3OTL
Toggle
Latch
T3OUT
Capture
Reload
T4IN
T4EUD
T4
Mode
Control
Aux. Timer T4
U/D
Interrupt
Request
(T4IRQ)
MCA05563
Figure 7 Block Diagram of GPT1
With its maximum resolution of 2 system clock cycles, the GPT2 module provides
precise event control and time measurement. It includes two timers (T5, T6) and a
capture/reload register (CAPREL). Both timers can be clocked with an input clock which
is derived from the CPU clock via a programmable prescaler or with external signals. The
Data Sheet 30 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
count direction (up/down) for each timer is programmable by software or may
additionally be altered dynamically by an external signal on a port pin (TxEUD).
Concatenation of the timers is supported via the output toggle latch (T6OTL) of timer T6,
which changes its state on each timer overflow/underflow.
The state of this latch may be used to clock timer T5, and/or it may be output on pin
T6OUT. The overflows/underflows of timer T6 can additionally be used to clock the
CAPCOM2 timers, and to cause a reload from the CAPREL register.
The CAPREL register may capture the contents of timer T5 based on an external signal
transition on the corresponding port pin (CAPIN), and timer T5 may optionally be cleared
after the capture procedure. This allows the XC164SM to measure absolute time
differences or to perform pulse multiplication without software overhead.
The capture trigger (timer T5 to CAPREL) may also be generated upon transitions of
GPT1 timer T3’s inputs T3IN and/or T3EUD. This is especially advantageous when T3
operates in Incremental Interface Mode.
Data Sheet 31 V1.2, 2007-03

f
T6CON.BPS2
XC164SM
Derivatives
Functional Description
GPT
T5IN
CAPIN
T3IN/
T3EUD
2n:1
T5
Mode
Control
CAPREL
Mode
Control
Basic Clock
U/D
Clear
Capture
Reload
Clear
GPT2 Timer T5
GPT2 CAPREL
Interrupt
Request
(T5IRQ)
Interrupt
Request
(CRIRQ)
Interrupt
Request
(T6IRQ)
Toggle
FF
GPT2 Timer T6 T6OTL
T6OUT
T6
Mode
Control
U/D
T6OUF
T6IN
MCA05564
Figure 8 Block Diagram of GPT2
Data Sheet 32 V1.2, 2007-03

XC164SM
f
f
Derivatives
Functional Description
3.8 Real Time Clock
The Real Time Clock (RTC) module of the XC164SM is directly clocked via a separate
clock driver with the prescaled on-chip main oscillator frequency (
therefore independent from the selected clock generation mode of the XC164SM.
The RTC basically consists of a chain of divider blocks:
• A selectable 8:1 divider (on - off)
• The reloadable 16-bit timer T14
• The 32-bit RTC timer block (accessible via registers RTCH and RTCL), made of:
– a reloadable 10-bit timer
– a reloadable 6-bit timer
– a reloadable 6-bit timer
– a reloadable 10-bit timer
All timers count up. Each timer can generate an interrupt request. All requests are
combined to a common node request.
f
RTC
= f
OSCm
/32). It is
RT C
:
8
MUX
RTCINT
Interrupt Sub Node
RUN
PRE
CNT
INT0
CNT
INT1
CNT
INT2
CNT
INT3
REL-Register
T14REL 10 Bits6 Bits6 Bits10 Bits
CNT
T14-Register
CNT-Register
10 Bits6 Bits6 Bits10 BitsT14
MCB05568
Figure 9 RTC Block Diagram
Note: The registers associated with the RTC are not affected by a reset in order to
maintain the correct system time even when intermediate resets are executed.
Data Sheet 33 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
The RTC module can be used for different purposes:
• System clock to determine the current time and date,
optionally during idle mode, sleep mode, and power down mode
• Cyclic time based interrupt, to provide a system time tick independent of CPU
frequency and other resources, e.g. to wake up regularly from idle mode
• 48-bit timer for long term measurements (maximum timespan is > 100 years)
• Alarm interrupt for wake-up on a defined time
Data Sheet 34 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.9 A/D Converter
For analog signal measurement, a 10-bit A/D converter with 14 multiplexed input
channels and a sample and hold circuit has been integrated on-chip. It uses the method
of successive approximation. The sample time (for loading the capacitors) and the
conversion time is programmable (in two modes) and can thus be adjusted to the
external circuitry. The A/D converter can also operate in 8-bit conversion mode, where
the conversion time is further reduced.
Overrun error detection/protection is provided for the conversion result register
(ADDAT): either an interrupt request will be generated when the result of a previous
conversion has not been read from the result register at the time the next conversion is
complete, or the next conversion is suspended in such a case until the previous result
has been read.
For applications which require less analog input channels, the remaining channel inputs
can be used as digital input port pins.
The A/D converter of the XC164SM supports four different conversion modes. In the
standard Single Channel conversion mode, the analog level on a specified channel is
sampled once and converted to a digital result. In the Single Channel Continuous mode,
the analog level on a specified channel is repeatedly sampled and converted without
software intervention. In the Auto Scan mode, the analog levels on a prespecified
number of channels are sequentially sampled and converted. In the Auto Scan
Continuous mode, the prespecified channels are repeatedly sampled and converted. In
addition, the conversion of a specific channel can be inserted (injected) into a running
sequence without disturbing this sequence. This is called Channel Injection Mode.
The Peripheral Event Controller (PEC) may be used to automatically store the
conversion results into a table in memory for later evaluation, without requiring the
overhead of entering and exiting interrupt routines for each data transfer.
After each reset and also during normal operation the ADC automatically performs
calibration cycles. This automatic self-calibration constantly adjusts the converter to
changing operating conditions (e.g. temperature) and compensates process variations.
These calibration cycles are part of the conversion cycle, so they do not affect the normal
operation of the A/D converter.
In order to decouple analog inputs from digital noise and to avoid input trigger noise
those pins used for analog input can be disconnected from the digital input stages under
software control. This can be selected for each pin separately via register P5DIDIS
(Port 5 Digital Input Disable).
The Auto-Power-Down feature of the A/D converter minimizes the power consumption
when no conversion is in progress.
Data Sheet 35 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.10 Asynchronous/Synchronous Serial Interfaces (ASC0/ASC1)
The Asynchronous/Synchronous Serial Interfaces ASC0/ASC1 (USARTs) provide serial
communication with other microcontrollers, processors, terminals or external peripheral
components. They are upward compatible with the serial ports of the Infineon 8-bit
microcontroller families and support full-duplex asynchronous communication and halfduplex synchronous communication. A dedicated baudrate generator with a fractional
divider precisely generates all standard baud rates without oscillator tuning. For
transmission, reception, error handling, and baud rate detection 5 separate interrupt
vectors are provided.
In asynchronous mode, 8- or 9-bit data frames (with optional parity bit) are transmitted
or received, preceded by a start bit and terminated by one or two stop bits. For
multiprocessor communication, a mechanism to distinguish address from data bytes has
been included (8-bit data plus wake-up bit mode). IrDA data transmissions up to
115.2 kbit/s with fixed or programmable IrDA pulse width are supported.
In synchronous mode, bytes (8 bits) are transmitted or received synchronously to a shift
clock which is generated by the ASC0/1. The LSB is always shifted first.
In both modes, transmission and reception of data is FIFO-buffered. An autobaud
detection unit allows to detect asynchronous data frames with its baudrate and mode
with automatic initialization of the baudrate generator and the mode control bits.
A number of optional hardware error detection capabilities has been included to increase
the reliability of data transfers. A parity bit can automatically be generated on
transmission or be checked on reception. Framing error detection allows to recognize
data frames with missing stop bits. An overrun error will be generated, if the last
character received has not been read out of the receive buffer register at the time the
reception of a new character is complete.
Summary of Features
• Full-duplex asynchronous operating modes
– 8- or 9-bit data frames, LSB first, one or two stop bits, parity generation/checking
– Baudrate from 2.5 Mbit/s to 0.6 bit/s (@ 40 MHz)
– Multiprocessor mode for automatic address/data byte detection
– Support for IrDA data transmission/reception up to max. 115.2 kbit/s (@ 40 MHz)
– Auto baudrate detection
• Half-duplex 8-bit synchronous operating mode at 5 Mbit/s to 406.9 bit/s (@ 40 MHz)
• Buffered transmitter/receiver with FIFO support (8 entries per direction)
• Loop-back option available for testing purposes
• Interrupt generation on transmitter buffer empty condition, last bit transmitted
condition, receive buffer full condition, error condition (frame, parity, overrun error),
start and end of an autobaud detection
Data Sheet 36 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.11 High Speed Synchronous Serial Channels (SSC0/SSC1)
The High Speed Synchronous Serial Channels SSC0/SSC1 support full-duplex and halfduplex synchronous communication. It may be configured so it interfaces with serially
linked peripheral components, full SPI functionality is supported.
A dedicated baud rate generator allows to set up all standard baud rates without
oscillator tuning. For transmission, reception and error handling three separate interrupt
vectors are provided.
The SSC transmits or receives characters of 2 … 16 bits length synchronously to a shift
clock which can be generated by the SSC (master mode) or by an external master (slave
mode). The SSC can start shifting with the LSB or with the MSB and allows the selection
of shifting and latching clock edges as well as the clock polarity.
A number of optional hardware error detection capabilities has been included to increase
the reliability of data transfers. Transmit error and receive error supervise the correct
handling of the data buffer. Phase error and baudrate error detect incorrect serial data.
Summary of Features
• Master or Slave mode operation
• Full-duplex or Half-duplex transfers
• Baudrate generation from 20 Mbit/s to 305.18 bit/s (@ 40 MHz)
• Flexible data format
– Programmable number of data bits: 2 to 16 bits
– Programmable shift direction: LSB-first or MSB-first
– Programmable clock polarity: idle low or idle high
– Programmable clock/data phase: data shift with leading or trailing clock edge
• Loop back option available for testing purposes
• Interrupt generation on transmitter buffer empty condition, receive buffer full
condition, error condition (receive, phase, baudrate, transmit error)
• Three pin interface with flexible SSC pin configuration
Data Sheet 37 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.12 Watchdog Timer
The Watchdog Timer represents one of the fail-safe mechanisms which have been
implemented to prevent the controller from malfunctioning for longer periods of time.
The Watchdog Timer is always enabled after a reset of the chip, and can be disabled
until the EINIT instruction has been executed (compatible mode), or it can be disabled
and enabled at any time by executing instructions DISWDT and ENWDT (enhanced
mode). Thus, the chip’s start-up procedure is always monitored. The software has to be
designed to restart the Watchdog Timer before it overflows. If, due to hardware or
software related failures, the software fails to do so, the Watchdog Timer overflows and
generates an internal hardware reset.
The Watchdog Timer is a 16-bit timer, clocked with the system clock divided by
2/4/128/256. The high byte of the Watchdog Timer register can be set to a prespecified
reload value (stored in WDTREL) in order to allow further variation of the monitored time
interval. Each time it is serviced by the application software, the high byte of the
Watchdog Timer is reloaded and the low byte is cleared. Thus, time intervals between
13 μs and 419 ms can be monitored (@ 40 MHz).
The default Watchdog Timer interval after reset is 3.28 ms (@ 40 MHz).
Data Sheet 38 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.13 Clock Generation
The Clock Generation Unit uses a programmable on-chip PLL with multiple prescalers
to generate the clock signals for the XC164SM with high flexibility. The master clock
is the reference clock signal and is output to the external system. The CPU clock f
and the system clock f
2:1 prescaler (
f
SYS
= f
are derived from the master clock either directly (1:1) or via a
SYS
= fMC / 2). See also Section 4.4.1.
CPU
The on-chip oscillator can drive an external crystal or accepts an external clock signal.
The oscillator clock frequency can be multiplied by the on-chip PLL (by a programmable
factor) or can be divided by a programmable prescaler factor.
If the bypass mode is used (direct drive or prescaler) the PLL can deliver an independent
clock to monitor the clock signal generated by the on-chip oscillator. This PLL clock is
independent from the XTAL1 clock. When the expected oscillator clock transitions are
missing the Oscillator Watchdog (OWD) activates the PLL Unlock/OWD interrupt node
and supplies the CPU with an emergency clock, the PLL clock signal. Under these
circumstances the PLL will oscillate with its basic frequency.
f
MC
CPU
The oscillator watchdog can be disabled by switching the PLL off. This reduces power
consumption, but also no interrupt request will be generated in case of a missing
oscillator clock.
Data Sheet 39 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.14 Parallel Ports
The XC164SM provides up to 47 I/O lines which are organized into three input/output
ports and one input port. All port lines are bit-addressable, and all input/output lines are
individually (bit-wise) programmable as inputs or outputs via direction registers. The I/O
ports are true bidirectional ports which are switched to high impedance state when
configured as inputs. The output drivers of some I/O ports can be configured (pin by pin)
for push/pull operation or open-drain operation via control registers. During the internal
reset, all port pins are configured as inputs.
The edge characteristics (shape) and driver characteristics (output current) of the port
drivers can be selected via registers POCONx.
The input threshold of some ports is selectable (TTL or CMOS like), where the special
CMOS like input threshold reduces noise sensitivity due to the input hysteresis. The
input threshold may be selected individually for each byte of the respective ports.
All port lines have programmable alternate input or output functions associated with
them. All port lines that are not used for these alternate functions may be used as general
purpose IO lines.
Table 7 Summary of the XC164SM’s Parallel Ports
Port Control Alternate Functions
PORT1 Pad drivers Capture inputs or compare outputs,
Serial interface lines
Port 3 Pad drivers,
Open drain,
Input threshold
Port 5 – Analog input channels to the A/D converter,
Port 9 Pad drivers,
Open drain,
Input threshold
Timer control signals, serial interface lines,
System clock output CLKOUT (or FOUT)
Timer control signals
Capture inputs or compare outputs
Data Sheet 40 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.15 Power Management
The XC164SM provides several means to control the power it consumes either at a
given time or averaged over a certain timespan. Three mechanisms can be used (partly
in parallel):
• Power Saving Modes switch the XC164SM into a special operating mode (control
via instructions).
Idle Mode stops the CPU while the peripherals can continue to operate.
Sleep Mode and Power Down Mode stop all clock signals and all operation (RTC may
optionally continue running). Sleep Mode can be terminated by external interrupt
signals.
• Clock Generation Management controls the distribution and the frequency of
internal and external clock signals. While the clock signals for currently inactive parts
of logic are disabled automatically, the user can reduce the XC164SM’s CPU clock
frequency which drastically reduces the consumed power.
External circuitry can be controlled via the programmable frequency output FOUT.
• Peripheral Management permits temporary disabling of peripheral modules (control
via register SYSCON3). Each peripheral can separately be disabled/enabled.
The on-chip RTC supports intermittent operation of the XC164SM by generating cyclic
wake-up signals. This offers full performance to quickly react on action requests while
the intermittent sleep phases greatly reduce the average power consumption of the
system.
Data Sheet 41 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
3.16 Instruction Set Summary
Table 8 lists the instructions of the XC164SM in a condensed way.
The various addressing modes that can be used with a specific instruction, the operation
of the instructions, parameters for conditional execution of instructions, and the opcodes
for each instruction can be found in the “Instruction Set Manual”.
This document also provides a detailed description of each instruction.
Table 8 Instruction Set Summary
Mnemonic Description Bytes
ADD(B) Add word (byte) operands 2 / 4
ADDC(B) Add word (byte) operands with Carry 2 / 4
SUB(B) Subtract word (byte) operands 2 / 4
SUBC(B) Subtract word (byte) operands with Carry 2 / 4
MUL(U) (Un)Signed multiply direct GPR by direct GPR
(16- × 16-bit)
DIV(U) (Un)Signed divide register MDL by direct GPR (16-/16-bit) 2
DIVL(U) (Un)Signed long divide reg. MD by direct GPR (32-/16-bit) 2
CPL(B) Complement direct word (byte) GPR 2
NEG(B) Negate direct word (byte) GPR 2
AND(B) Bitwise AND, (word/byte operands) 2 / 4
OR(B) Bitwise OR, (word/byte operands) 2 / 4
XOR(B) Bitwise exclusive OR, (word/byte operands) 2 / 4
BCLR/BSET Clear/Set direct bit 2
BMOV(N) Move (negated) direct bit to direct bit 4
BAND/BOR/BXOR AND/OR/XOR direct bit with direct bit 4
BCMP Compare direct bit to direct bit 4
BFLDH/BFLDL Bitwise modify masked high/low byte of bit-addressable
direct word memory with immediate data
2
4
CMP(B) Compare word (byte) operands 2 / 4
CMPD1/2 Compare word data to GPR and decrement GPR by 1/2 2 / 4
CMPI1/2 Compare word data to GPR and increment GPR by 1/2 2 / 4
PRIOR Determine number of shift cycles to normalize direct
word GPR and store result in direct word GPR
SHL/SHR Shift left/right direct word GPR 2
Data Sheet 42 V1.2, 2007-03
2

XC164SM
Derivatives
Functional Description
Table 8 Instruction Set Summary (cont’d)
Mnemonic Description Bytes
ROL/ROR Rotate left/right direct word GPR 2
ASHR Arithmetic (sign bit) shift right direct word GPR 2
MOV(B) Move word (byte) data 2 / 4
MOVBS/Z Move byte operand to word op. with sign/zero extension 2 / 4
JMPA/I/R Jump absolute/indirect/relative if condition is met 4
JMPS Jump absolute to a code segment 4
JB(C) Jump relative if direct bit is set (and clear bit) 4
JNB(S) Jump relative if direct bit is not set (and set bit) 4
CALLA/I/R Call absolute/indirect/relative subroutine if condition is met 4
CALLS Call absolute subroutine in any code segment 4
PCALL Push direct word register onto system stack and call
absolute subroutine
TRAP Call interrupt service routine via immediate trap number 2
PUSH/POP Push/pop direct word register onto/from system stack 2
SCXT Push direct word register onto system stack and update
register with word operand
RET(P) Return from intra-segment subroutine
(and pop direct word register from system stack)
RETS Return from inter-segment subroutine 2
RETI Return from interrupt service subroutine 2
SBRK Software Break 2
SRST Software Reset 4
IDLE Enter Idle Mode 4
PWRDN Enter Power Down Mode (supposes NMI
-pin being low) 4
SRVWDT Service Watchdog Timer 4
4
4
2
DISWDT/ENWDT Disable/Enable Watchdog Timer 4
EINIT End-of-Initialization Register Lock 4
ATOMIC Begin ATOMIC sequence 2
EXTR Begin EXTended Register sequence 2
EXTP(R) Begin EXTended Page (and Register) sequence 2 / 4
EXTS(R) Begin EXTended Segment (and Register) sequence 2 / 4
Data Sheet 43 V1.2, 2007-03

XC164SM
Derivatives
Functional Description
Table 8 Instruction Set Summary (cont’d)
Mnemonic Description Bytes
NOP Null operation 2
CoMUL/CoMAC Multiply (and accumulate) 4
CoADD/CoSUB Add/Subtract 4
Co(A)SHR (Arithmetic) Shift right 4
CoSHL Shift left 4
CoLOAD/STORE Load accumulator/Store MAC register 4
CoCMP Compare 4
CoMAX/MIN Maximum/Minimum 4
CoABS/CoRND Absolute value/Round accumulator 4
CoMOV Data move 4
CoNEG/NOP Negate accumulator/Null operation 4
Data Sheet 44 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
4 Electrical Parameters
The operating range for the XC164SM is defined by its electrical parameters. For proper
operation the indicated limitations must be respected when designing a system.
4.1 General Parameters
These parameters are valid for all subsequent descriptions, unless otherwise noted.
Table 9 Absolute Maximum Ratings
Parameter Symbol Limit Values Unit Notes
Min. Max.
Storage temperature
T
ST
-65 150 °C
1)
Junction temperature T
Voltage on
respect to ground (
Voltage on
respect to ground (
V
pins with
DDI
V
DDP
V
)
SS
pins with
V
)
SS
Voltage on any pin with
respect to ground (
V
SS
)
Input current on any pin
J
V
DDI
V
DDP
V
IN
–-1010mA–
-40 150 °C Under bias
-0.5 3.25 V –
-0.5 6.2 V –
-0.5 V
DDP
+
V
2)
0.5
during overload condition
Absolute sum of all input
– – |100| mA –
currents during overload
condition
1) Moisture Sensitivity Level (MSL) 3, conforming to Jedec J-STD-020C for 260 °C.
2) Input pin XTAL1 belongs to the core voltage domain. Therefore, input voltages must be within the range
defined for VDDI.
Note: Stresses above those listed under “Absolute Maximum Ratings” may cause
permanent damage to the device. This is a stress rating only and functional
operation of the device at these or any other conditions above those indicated in
the operational sections of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability.
During absolute maximum rating overload conditions (
voltage on
V
pins with respect to ground (VSS) must not exceed the values
DDP
V
IN
> V
or VIN < VSS) the
DDP
defined by the absolute maximum ratings.
Data Sheet 45 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
Operating Conditions
The following operating conditions must not be exceeded to ensure correct operation of
the XC164SM. All parameters specified in the following sections refer to these operating
conditions, unless otherwise noticed.
Table 10 Operating Condition Parameters
Parameter Symbol Limit Values Unit Notes
Min. Max.
Digital supply voltage for
V
DDI
the core
Digital supply voltage for
V
DDP
IO pads
Supply Voltage Difference ΔV
Digital ground voltage V
Overload current
Overload current coupling
factor for analog inputs
7)
Overload current coupling
factor for digital I/O pins
7)
Absolute sum of overload
I
K
K
Σ|
SS
OV
currents
External Load
C
Capacitance
2.35 2.7 V Active mode,
4.4 5.5 V Active mode
DD
-0.5 – V V
0 V Reference voltage
-5 5 mA Per IO pin
-2 5 mA Per analog input
OVA
OVD
I
OV
L
–1.0 × 10-4– IOV > 0
–1.5 × 10
-3
–5.0 × 10-3– IOV > 0
–1.0 × 10
-2
|– 50 mA
– 50 pF Pin drivers in
f
= f
CPU
- V
DDP
5)6)
pin
– IOV < 0
– IOV < 0
6)
default mode
CPUmax
1)
2)3)
4)
DDI
5)6)
8)
Ambient temperature T
A
070°C SAB-XC164…
-40 85 °C SAF-XC164…
-40 125 °C SAK-XC164…
1) f
2) External circuitry must guarantee low-level at the RSTIN pin at least until both power supply voltages have
3) The specified voltage range is allowed for operation. The range limits may be reached under extreme
4) This limitation must be fulfilled under all operating conditions including power-ramp-up, power-ramp-down,
Data Sheet 46 V1.2, 2007-03
= 40 MHz for devices marked … 40F, f
CPUmax
reached the operating range.
operating conditions. However, specified parameters, such as leakage currents, refer to the standard
operating voltage range of
and power-save modes.
V
= 4.75 V to 5.25 V.
DDP
= 20 MHz for devices marked … 20F.
CPUmax

XC164SM
Derivatives
Electrical Parameters
5) Overload conditions occur if the standard operating conditions are exceeded, i.e. the voltage on any pin
exceeds the specified range:
input overload currents on all pins may not exceed 50 mA. The supply voltages must remain within the
specified limits.
Proper operation is not guaranteed if overload conditions occur on functional pins such as XTAL1.
6) Not subject to production test - verified by design/characterization.
7) An overload current (
current adds to the respective pin’s leakage current (
current and is defined by the overload coupling factor
compared to the polarity of the overload current that produces it.
The total current through a pin is |
voltage on analog inputs.
8) The timing is valid for pin drivers operating in default current mode (selected after reset). Reducing the output
current may lead to increased delays or reduced driving capability (
I
OV
Parameter Interpretation
V
> V
OV
) through a pin injects a certain error current (I
+ 0.5 V (IOV > 0) or VOV < VSS - 0.5 V (IOV < 0). The absolute sum of
DDP
I
). The amount of error current depends on the overload
OZ
K
. The polarity of the injected error current is inverse
OV
I
| = |IOZ| + (|IOV| × KOV). The additional error current may distort the input
TOT
C
).
L
) into the adjacent pins. This error
INJ
The parameters listed in the following partly represent the characteristics of the
XC164SM and partly its demands on the system. To aid in interpreting the parameters
right, when evaluating them for a design, they are marked in column “Symbol”:
CC (Controller Characteristics):
The logic of the XC164SM will provide signals with the respective characteristics.
SR (System Requirement):
The external system must provide signals with the respective characteristics to the
XC164SM.
Data Sheet 47 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
4.2 DC Parameters
These parameters are static or average values, which may be exceeded during
switching transitions (e.g. output current).
Table 11 DC Characteristics (Operating Conditions apply)
1)
Parameter Symbol Limit Values Unit Test Condition
Min. Max.
Input low voltage TTL
(all except XTAL1)
Input low voltage
XTAL1
2)
Input low voltage
(Special Threshold)
Input high voltage TTL
(all except XTAL1)
Input high voltage
XTAL1
2)
Input high voltage
(Special Threshold)
Input Hysteresis
(Special Threshold)
Output low voltage V
Output high voltage
V
V
V
V
V
V
IL
ILC
ILS
IH
IHC
IHS
SR -0.5 0.2 × V
SR -0.5 0.3 × V
SR -0.5 0.45 ×
SR 0.2 × V
SR 0.7 × V
SR 0.8 × V
HYS 0.04 ×
OL
6)
V
OH
CC – 1.0 V IOL ≤ I
CC V
V–
DDP
- 0.1
V–
DDI
3)
DDP
V
V
DDP
V
+ 0.5 V –
DDP
+ 0.9
V
DDI
DDP
+ 0.5 V –
DDI
V
+ 0.5 V
DDP
3)
- 0.2
V
–VV
DDP
DDP
Series resistance = 0 Ω
–0.45VIOL ≤ I
- 1.0 – V IOH ≥ I
DDP
V
DDP
-
–VIOH ≥ I
in [V],
3)
4)
OLmax
4)5)
OLnom
4)
OHmax
4)5)
OHnom
0.45
Input leakage current
(Port 5)
7)
Input leakage current
(all other
8))7)
Configuration pull-up
current
Data Sheet 48 V1.2, 2007-03
9)
I
OZ1
I
OZ2
I
CPUH
I
CPUL
CC – ±300 nA 0 V < VIN < V
T
≤ 125 °C
A
±200 nA 0 V <
T
≤ 85 °C
A
CC – ±500 nA 0.45 V < VIN <
V
DDP
10)
11)
–-10μA VIN = V
-100 – μA VIN = V
V
< V
IN
IHmin
ILmax
12)
DDP
DDP
,
,

XC164SM
Derivatives
Electrical Parameters
Table 11 DC Characteristics (Operating Conditions apply)
1)
(cont’d)
Parameter Symbol Limit Values Unit Test Condition
Min. Max.
XTAL1 input current I
Pin capacitance
12)
C
IL
IO
CC – ±20 μA0 V < VIN < V
CC – 10 pF –
DDI
(digital inputs/outputs)
1) Keeping signal levels within the limits specified in this table, ensures operation without overload conditions.
For signal levels outside these specifications, also refer to the specification of the overload current
V
2) If XTAL1 is driven by a crystal, reaching an amplitude (peak to peak) of 0.4 ×
3) This parameter is tested for P3, P9.
4) The maximum deliverable output current of a port driver depends on the selected output driver mode, see
Table 12, Current Limits for Port Output Drivers. The limit for pin groups must be respected.
5) As a rule, with decreasing output current the output levels approach the respective supply level (
V
→ V
OH
6) This specification is not valid for outputs which are switched to open drain mode. In this case the respective
output will float and the voltage results from the external circuitry.
7) An additional error current (
the definition of the overload coupling factor
8) The driver of P3.15 is designed for faster switching, because this pin can deliver the system clock (CLKOUT).
The maximum leakage current for P3.15 is, therefore, increased to 1 μA.
9) During a hardware reset this specification is valid for configuration on P1H.4, P1H.5, P9.4 and P9.5.
After a hardware reset this specification is valid for NMI
10) The maximum current may be drawn while the respective signal line remains inactive.
11) The minimum current must be drawn to drive the respective signal line active.
12) Not subject to production test - verified by design/characterization.
). However, only the levels for nominal output currents are guaranteed.
DDP
I
) will flow if an overload current flows through an adjacent pin. Please refer to
INJ
K
.
OV
.
is sufficient.
DDI
I
V
OL
.
OV
→ VSS,
Table 12 Current Limits for Port Output Drivers
Port Output Driver
Mode
Maximum Output Current
I
(
OLmax
, -I
OHmax
1)
)
Nominal Output Current
(
I
OLnom
, -I
OHnom
)
Strong driver 10 mA 2.5 mA
Medium driver 4.0 mA 1.0 mA
Weak driver 0.5 mA 0.1 mA
1) An output current above |I
For any group of 16 neighboring port output pins the total output current in each direction (Σ
remain below 50 mA.
Data Sheet 49 V1.2, 2007-03
| may be drawn from up to three pins at the same time.
OXnom
I
and Σ-IOH) must
OL

Derivatives
Electrical Parameters
Table 13 Power Consumption XC164SM (Operating Conditions apply)
XC164SM
Parameter Sym-
bol
Power supply current (active)
I
DDI
with all peripherals active
Pad supply current
Idle mode supply current with
I
DDP
I
IDX
all peripherals active
Sleep and Power down mode
I
5)
PDL
supply current caused by
leakage
Sleep and Power down mode
4)
I
PDM
supply current caused by
leakage and the RTC running,
clocked by the main oscillator
4)
Limit Values Unit Test Condition
Min. Max.
–15 +
2.6 ×
f
CPU
– 10 +
2.6 ×
f
CPU
mA f
mA f
–5 mA
–15 +
1.2 ×
f
– 10 +
1.2 ×
f
–84,000
-α
× e
– 128,000
-α
× e
7)
– 0.6 +
0.02 ×
+
I
PDL
CPU
CPU
f
OSC
mA f
mA f
mA V
mA α = 4670 / (273 + TJ)
mA V
in [MHz]
CPU
1)2)
,
-16F derivatives
in [MHz]
CPU
1)2)
,
-4F/8F derivatives
3)
in [MHz]2),
CPU
-16F derivatives
in [MHz]2),
CPU
-4F/8F derivatives
DDI
T
in [°C]
J
= V
DDImax
6)
α = 4380 / (273 +
-16F derivatives
-4F/8F derivatives
= V
f
OSC
DDI
DDImax
in [MHz]
T
)
J
1) During Flash programming or erase operations the supply current is increased by max. 5 mA.
2) The supply current is a function of the operating frequency. This dependency is illustrated in Figure 10.
These parameters are tested at
all inputs at
3) The pad supply voltage pins (V
amount of current is consumed even though no outputs are driven, because the drivers’ input stages are
switched and also the Flash module draws some power from the
4) The total supply current in Sleep and Power down mode is the sum of the temperature dependent leakage
current and the frequency dependent current for RTC and main oscillator.
5) This parameter is determined mainly by the transistor leakage currents. This current heavily depends on the
junction temperature (see Figure 12). The junction temperature
if no current flows through the port output drivers. Otherwise, the resulting temperature difference must be
taken into account.
6) All inputs (including pins configured as inputs) at 0 V to 0.1 V or at V
pins configured as outputs) disconnected. This parameter is tested at 25 °C and is valid for
7) This parameter is determined mainly by the current consumed by the oscillator switched to low gain mode (see
Figure 11). This current, however, is influenced by the external oscillator circuitry (crystal, capacitors). The
given values refer to a typical circuitry and may change in case of a not optimized external oscillator circuitry.
V
IL
or VIH.
V
DDP
and maximum CPU clock frequency with all outputs disconnected and
DDImax
) mainly provides the current consumed by the pin output drivers. A small
V
supply.
DDP
T
is the same as the ambient temperature T
J
- 0.1 V to V
DDP
, all outputs (including
DDP
T
≥ 25 °C.
J
Data Sheet 50 V1.2, 2007-03
A

I [mA]
140
XC164SM
Derivatives
Electrical Parameters
-16F
I
DDImax
-4F/8F
120
100
80
60
40
-16F
I
DDItyp
-4F/8F
-16F
I
IDXmax
-4F/8F
-16F
I
IDXtyp
-4F/8F
20
10 20 30 40
f
CPU
[MHz]
Figure 10 Supply/Idle Current as a Function of Operating Frequency
Data Sheet 51 V1.2, 2007-03

I [mA]
3.0
2.0
1.0
XC164SM
Derivatives
Electrical Parameters
I
PDMmax
I
PDMtyp
4 8 12 16
f
OSC
[MHz]
Figure 11 Sleep and Power Down Supply Current due to RTC and Oscillator
Running, as a Function of Oscillator Frequency
I
PDL
[mA]
1.5
-16F
1.0
0.5
-4F/8F
-50
0 50 100 150
T
[°C]
J
Figure 12 Sleep and Power Down Leakage Supply Current as a Function of
Temperature
Data Sheet 52 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
4.3 Analog/Digital Converter Parameters
These parameters describe how the optimum ADC performance can be reached.
Table 14 A/D Converter Characteristics (Operating Conditions apply)
Parameter Symbol Limit Values Unit Test
Condition
1)
Analog reference supply
V
AREF
Min. Max.
SR 4.5 V
+ 0.1
DDP
V
Analog reference ground V
Analog input voltage range
Basic clock frequency f
Conversion time for 10-bit
result
4)
Conversion time for 8-bit
result
4)
Calibration time after reset
AGND
V
AIN
BC
t
C10P
t
C10
t
C8P
t
C8
t
CAL
Total unadjusted error TUE CC – ±2LSB
Total capacitance
C
AINT
SR VSS - 0.1 VSS + 0.1 V –
SR V
AGND
V
AREF
V
0.5 20 MHz
CC 52 × tBC + tS + 6 × t
CC 40 × tBC + tS + 6 × t
CC 44 × tBC + tS + 6 × t
CC 32 × tBC + tS + 6 × t
CC 484 11,696 t
– Post-calibr. on
SYS
– Post-calibr. off
SYS
– Post-calibr. on
SYS
– Post-calibr. off
SYS
BC
CC – 15 pF
2)
3)
5)
1)
6)
of an analog input
Switched capacitance
C
AINS
CC – 10 pF
6)
of an analog input
Resistance of
R
AIN
CC – 2 kΩ
6)
the analog input path
Total capacitance
C
AREFT
CC – 20 pF
6)
of the reference input
Switched capacitance
C
AREFS
CC – 15 pF
6)
of the reference input
Resistance of
R
AREF
CC – 1 kΩ
6)
the reference input path
1) TUE is tested at V
defined voltage range.
If the analog reference supply voltage drops below 4.5 V (i.e.
voltage by up to 0.2 V (i.e.
subject to production test.
The specified TUE is guaranteed only, if the absolute sum of input overload currents on Port 5 pins (see
specification) does not exceed 10 mA, and if V
time. During the reset calibration sequence the maximum TUE may be ±4 LSB.
AREF
= V
+ 0.1 V, V
DDP
V
= V
AREF
= 0 V. It is verified by design for all other voltages within the
AGND
V
≥ 4.0 V) or exceeds the power supply
AREF
+ 0.2 V) the maximum TUE is increased to ±3 LSB. This range is not
DDP
AREF
and V
remain stable during the respective period of
AGND
I
OV
Data Sheet 53 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
2) V
3) The limit values for
4) This parameter includes the sample time
may exceed V
AIN
cases will be X000
result register with the conversion result (
Values for the basic clock
or V
AGND
or X3FFH, respectively.
H
f
must not be exceeded when selecting the peripheral frequency and the ADCTC setting.
BC
up to the absolute maximum ratings. However, the conversion result in these
AREF
t
, the time for determining the digital result and the time to load the
S
t
= 1/f
SYS
t
depend on programming and can be taken from Table 15.
BC
SYS
).
When the post-calibration is switched off, the conversion time is reduced by 12 ×
t
.
BC
5) The actual duration of the reset calibration depends on the noise on the reference signal. Conversions
executed during the reset calibration increase the calibration time. The TUE for those conversions may be
increased.
6) Not subject to production test - verified by design/characterization.
The given parameter values cover the complete operating range. Under relaxed operating conditions
(temperature, supply voltage) reduced values can be used for calculations. At room temperature and nominal
supply voltage the following typical values can be used:
C
AINTtyp
= 12 pF, C
AINStyp
= 7 pF, R
= 1.5 kΩ, C
AINtyp
AREFTtyp
= 15 pF, C
AREFStyp
= 13 pF, R
AREFtyp
= 0.7 kΩ.
A/D Converter
R
Source
R
AIN, On
V
AIN
C
Ext
C
-
AINTCAINS
Figure 13 Equivalent Circuitry for Analog Inputs
C
AINS
MCS05570
Data Sheet 54 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
Sample time and conversion time of the XC164SM’s A/D Converter are programmable.
In compatibility mode, the above timing can be calculated using Table 15.
The limit values for
f
must not be exceeded when selecting ADCTC.
BC
Table 15 A/D Converter Computation Table
ADCON.15|14
(ADCTC)
00 f
01
10
11
1) These selections are available in compatibility mode. An improved mechanism to control the ADC input clock
can be selected.
A/D Converter
Basic Clock
/ 4 00 tBC × 8
SYS
f
/ 2 01 tBC × 16
SYS
f
/ 16 10 tBC × 32
SYS
f
/ 8 11 tBC × 64
SYS
f
BC
ADCON.13|12
(ADSTC)
1)
Sample Time
t
S
Converter Timing Example:
Assumptions:
Basic clock
Sample time
f
SYS
f
BC
t
S
= 40 MHz (i.e. t
= f
/ 2 = 20 MHz, i.e. tBC = 50 ns
SYS
SYS
= tBC × 8 = 400 ns
= 25 ns), ADCTC = ‘01’, ADSTC = ‘00’
Conversion 10-bit:
With post-calibr.
Post-calibr. off
Conversion 8-bit:
With post-calibr.
Post-calibr. off
t
C10P
t
C10
t
C8P
t
C8
= 52 × tBC + tS + 6 × t
= 40 × tBC + tS + 6 × t
= 44 × tBC + tS + 6 × t
= 32 × tBC + tS + 6 × t
= (2600 + 400 + 150) ns = 3.15 μs
SYS
= (2000 + 400 + 150) ns = 2.55 μs
SYS
= (2200 + 400 + 150) ns = 2.75 μs
SYS
= (1600 + 400 + 150) ns = 2.15 μs
SYS
Data Sheet 55 V1.2, 2007-03

XC164SM
f
f
f
f
f
f
Derivatives
Electrical Parameters
4.4 AC Parameters
These parameters describe the dynamic behavior of the XC164SM.
4.4.1 Definition of Internal Timing
The internal operation of the XC164SM is controlled by the internal master clock fMC.
The master clock signal
f
can be generated from the oscillator clock signal f
MC
OSC
via
different mechanisms. The duration of master clock periods (TCMs) and their variation
(and also the derived external timing) depend on the used mechanism to generate
f
MC
.
This influence must be regarded when calculating the timings for the XC164SM.
Phase Locked Loop Operation (1:N)
OSC
MC
TCM
Direct Clock Drive (1:1)
OSC
MC
TCM
Prescaler Operation (N:1)
OSC
MC
TCM
MCT05555
Figure 14 Generation Mechanisms for the Master Clock
Note: The example for PLL operation shown in Figure 14 refers to a PLL factor of 1:4,
the example for prescaler operation refers to a divider factor of 2:1.
Data Sheet 56 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
The used mechanism to generate the master clock is selected by register PLLCON.
CPU and EBC are clocked with the CPU clock signal
same frequency as the master clock (
two:
f
= fMC / 2. This factor is selected by bit CPSYS in register SYSCON1.
CPU
f
= fMC) or can be the master clock divided by
CPU
f
. The CPU clock can have the
CPU
The specification of the external timing (AC Characteristics) depends on the period of the
CPU clock, called “TCP”.
The other peripherals are supplied with the system clock signal
frequency as the CPU clock signal
f
CPU
.
f
which has the same
SYS
Bypass Operation
When bypass operation is configured (PLLCTRL = 0x
) the master clock is derived from
B
the internal oscillator (input clock signal XTAL1) through the input- and outputprescalers:
f
= f
MC
If both divider factors are selected as ‘1’ (PLLIDIV = PLLODIV = ‘0’) the frequency of
directly follows the frequency of f
cycle of the input clock
/ ((PLLIDIV + 1) × (PLLODIV + 1)).
OSC
so the high and low time of fMC is defined by the duty
OSC
f
.
OSC
f
MC
The lowest master clock frequency is achieved by selecting the maximum values for both
divider factors:
f
MC
= f
/ ((3 + 1) × (14 + 1)) = f
OSC
OSC
/ 60.
Phase Locked Loop (PLL)
When PLL operation is configured (PLLCTRL = 11
) the on-chip phase locked loop is
B
enabled and provides the master clock. The PLL multiplies the input frequency by the
factor F (
f
MC
= f
× F) which results from the input divider, the multiplication factor, and
OSC
the output divider (F = PLLMUL+1 / (PLLIDIV+1 × PLLODIV+1)). The PLL circuit
synchronizes the master clock to the input clock. This synchronization is done smoothly,
i.e. the master clock frequency does not change abruptly.
Due to this adaptation to the input clock the frequency of
is locked to
f
. The slight variation causes a jitter of fMC which also affects the duration
OSC
f
is constantly adjusted so it
MC
of individual TCMs.
The timing listed in the AC Characteristics refers to TCPs. Because
f
, the timing must be calculated using the minimum TCP possible under the respective
MC
f
is derived from
CPU
circumstances.
The actual minimum value for TCP depends on the jitter of the PLL. As the PLL is
constantly adjusting its output frequency so it corresponds to the applied input frequency
(crystal or oscillator) the relative deviation for periods of more than one TCP is lower than
for one single TCP (see formula and Figure 15).
Data Sheet 57 V1.2, 2007-03

XC164SM
N
Derivatives
Electrical Parameters
This is especially important for bus cycles using waitstates and e.g. for the operation of
timers, serial interfaces, etc. For all slower operations and longer periods (e.g. pulse train
generation or measurement, lower baudrates, etc.) the deviation caused by the PLL jitter
is negligible.
The value of the accumulated PLL jitter depends on the number of consecutive VCO
output cycles within the respective timeframe. The VCO output clock is divided by the
output prescaler (K = PLLODIV+1) to generate the master clock signal
the number of VCO cycles can be represented as K × N, where N is the number of
consecutive
f
cycles (TCM).
MC
For a period of N × TCM the accumulated PLL jitter is defined by the deviation D
[ns] = ±(1.5 + 6.32 × N / fMC); fMC in [MHz], N = number of consecutive TCMs.
D
N
So, for a period of 3 TCMs @ 20 MHz and K = 12: D
= ±(1.5 + 6.32 × 3 / 20) = 2.448 ns.
3
This formula is applicable for K × N < 95. For longer periods the K × N = 95 value can be
used. This steady value can be approximated by: D
[ns] = ±(1.5 + 600 / (K × fMC)).
Nmax
f
. Therefore,
MC
:
N
Acc. jitter
ns
±8
±7
±6
±5
±4
±3
±2
±1
0
051015 20 25
D
N
10 MHz
40 MHz
1
K = 12
K = 15
20 MHz
K = 8
K = 10
K = 6 K = 5
MCD05566
Figure 15 Approximated Accumulated PLL Jitter
Note: The bold lines indicate the minimum accumulated jitter which can be achieved by
selecting the maximum possible output prescaler factor K.
Data Sheet 58 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
Different frequency bands can be selected for the VCO, so the operation of the PLL can
be adjusted to a wide range of input and output frequencies:
Table 16 VCO Bands for PLL Operation
1)
PLLCON.PLLVB VCO Frequency Range Base Frequency Range
00 100 … 150 MHz 20 … 80 MHz
01 150 … 200 MHz 40 … 130 MHz
10 200 … 250 MHz 60 … 180 MHz
11 Reserved
1) Not subject to production test - verified by design/characterization.
Data Sheet 59 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
4.4.2 On-chip Flash Operation
The XC164SM’s Flash module delivers data within a fixed access time (see Table 17).
Accesses to the Flash module are controlled by the PMI and take 1+WS clock cycles,
where WS is the number of Flash access waitstates selected via bitfield WSFLASH in
register IMBCTRL. The resulting duration of the access phase must cover the access
time
frequency.
The Flash access waitstates only affect non-sequential accesses. Due to prefetching
mechanisms, the performance for sequential accesses (depending on the software
structure) is only partially influenced by waitstates.
In typical applications, eliminating one waitstate increases the average performance by
5% … 15%.
Table 17 Flash Characteristics (Operating Conditions apply)
of the Flash array. The required Flash waitstates depend on the actual system
t
ACC
Parameter Symbol Limit Values Unit
Min. Typ. Max.
Flash module access time
Programming time per 128-byte block
Erase time per sector
1) The actual access time is influenced by the system frequency, see Table 18.
2) Programming and erase time depends on the system frequency. Typical values are valid for 40 MHz.
t
ACC
t
PR
t
ER
CC––50
CC – 2
CC – 200
2)
2)
1)
ns
5ms
500 ms
Example: For an operating frequency of 40 MHz (clock cycle = 25 ns), the Flash
accesses must be executed with 1 waitstate: ((1+1) × 25 ns) ≥ 50 ns.
Table 18 indicates the interrelation of waitstates and system frequency.
Table 18 Flash Access Waitstates
Required Waitstates Frequency Range
0 WS (WSFLASH = 00
1 WS (WSFLASH = 01
) f
B
) f
B
≤ 20 MHz
CPU
≤ 40 MHz
CPU
Note: The maximum achievable system frequency is limited by the properties of the
respective derivative, i.e. 40 MHz (or 20 MHz for XC164SM-xF20F devices).
Data Sheet 60 V1.2, 2007-03

XC164SM
Derivatives
Electrical Parameters
4.4.3 External Clock Drive XTAL1
These parameters define the external clock supply for the XC164SM.
Table 19 External Clock Drive Characteristics (Operating Conditions apply)
Parameter Symbol Limit Values Unit
Min. Max.
Oscillator period
High time
Low time
Rise time
Fall time
1) The maximum limit is only relevant for PLL operation to ensure the minimum input frequency for the PLL.
2) The clock input signal must reach the defined levels V
2)
2)
2)
2)
t
OSC
t
1
t
2
t
3
t
4
SR 25 250
SR6–ns
SR6–ns
SR–8ns
SR–8ns
ILC
and V
IHC
.
1)
ns
0.5
V
DDI
t
OSC
t
3
t
1
t
2
t
4
V
IHC
V
ILC
MCT05572
Figure 16 External Clock Drive XTAL1
Note: If the on-chip oscillator is used together with a crystal or a ceramic resonator, the
oscillator frequency is limited to a range of 4 MHz to 16 MHz.
It is strongly recommended to measure the oscillation allowance (negative
resistance) in the final target system (layout) to determine the optimum
parameters for the oscillator operation. Please refer to the limits specified by the
crystal supplier.
When driven by an external clock signal it will accept the specified frequency
range. Operation at lower input frequencies is possible but is verified by design
only (not subject to production test).
Data Sheet 61 V1.2, 2007-03

XC164SM
Derivatives
Package and Reliability
5 Package and Reliability
In addition to the electrical parameters, the following information ensures proper
integration of the XC164SM into the target system.
5.1 Packaging
These parameters describe the housing rather than the silicon.
Package Outlines
Figure 17 PG-LQFP-64-4 (Plastic Green Low profile Quad Flat Package),
valid for the -16F derivatives
Data Sheet 62 V1.2, 2007-03

0.2
0.5
+0.07
-0.03
XC164SM
Derivatives
Package and Reliability
±0.05
±0.05
0.1
D
C
M
A-B D 64xC
0.2
0.2
7.5
2)
0.08
12
1)
10
1.4
0.08
A-B
A-B
1.6 MAX.
4x
DDH
4x
H
±0.15
0.6
-0.06
+0.03
0.15
7˚ MAX.
A
64
1
Index Marking
1) Does not include plastic or metal protrusion of 0.25 max. per side
2) Does not include dambar protrusion of 0.08 max. per side
B
1)
12
10
Figure 18 PG-TQFP-64-8 (Plastic Thin Quad Flat Package),
valid for the -4F/8F derivatives
You can find all of our packages, sorts of packing and others in our Infineon Internet
Page “Products”: http://www.infineon.com/products
Dimensions in mm.
Table 20 Package Parameters
Parameter Symbol Limit Values Unit Notes
Min. Max.
PG-LQFP-64-4
Thermal resistance
R
ΘJC
–8K/W–
junction to case
Thermal resistance
R
ΘJL
–23K/W–
junction to leads
PG-TQFP-64-8
Thermal resistance
R
ΘJC
–9K/W–
junction to case
Thermal resistance
R
ΘJL
–19K/W–
junction to leads
Data Sheet 63 V1.2, 2007-03

XC164SM
Derivatives
Package and Reliability
5.2 Flash Memory Parameters
The data retention time of the XC164SM’s Flash memory (i.e. the time after which stored
data can still be retrieved) depends on the number of times the Flash memory has been
erased and programmed.
Table 21 Flash Parameters
Parameter Symbol Limit Values Unit Notes
Min. Max.
Data retention time
Flash Erase Endurance
t
RET
N
ER
15 – years 103 erase/program
cycles
20 × 10
3
– cycles Data retention time
5years
Data Sheet 64 V1.2, 2007-03

www.infineon.com
Published by Infineon Technologies AG
B158-H8890-G1-X-7600
 Loading...
Loading...