


Data Sheet, V1.2, March 2007
XC164GM
16-Bit Single-Chip Microcontroller
with C166SV2 Core
Microcontrollers

Edition 2007-03
Published by
Infineon Technologies AG
81726 Munich, Germany
© 2007 Infineon Technologies AG
All Rights Reserved.
Legal Disclaimer
The information given in this document shall in no event be regarded as a guarantee of conditions or
characteristics. With respect to any examples or hints given herein, any typical values stated herein and/or any
information regarding the application of the device, Infineon Technologies hereby disclaims any and all warranties
and liabilities of any kind, including without limitation, warranties of non-infringement of intellectual property rights
of any third party.
Information
For further information on technology, delivery terms and conditions and prices, please contact the nearest
Infineon Technologies Office (www.infineon.com).
Warnings
Due to technical requirements, components may contain dangerous substances. For information on the types in
question, please contact the nearest Infineon Technologies Office.
Infineon Technologies components may be used in life-support devices or systems only with the express written
approval of Infineon Technologies, if a failure of such components can reasonably be expected to cause the failure
of that life-support device or system or to affect the safety or effectiveness of that device or system. Life support
devices or systems are intended to be implanted in the human body or to support and/or maintain and sustain
and/or protect human life. If they fail, it is reasonable to assume that the health of the user or other persons may
be endangered.
Data Sheet, V1.2, March 2007
XC164GM
16-Bit Single-Chip Microcontroller
with C166SV2 Core
Microcontrollers
XC164GM
Revision History: V1.2, 2007-03
Previous Version(s):
V1.1, 2006-08
V1.0, 2005-11
Page Subjects (major changes since last revision)
6 Design steps of the derivatives differentiated.
52 Power consumption of the derivatives differentiated.
53 Figure 10 adapted.
54 Figure 12 adapted.
64 Packages of the derivatives differentiated.
XC164GM
Derivatives
65 Thermal resistances of the derivatives differentiated.
all “Preliminary” removed
We Listen to Your Comments
Any information within this document that you feel is wrong, unclear or missing at all?
Your feedback will help us to continuously improve the quality of this document.
Please send your proposal (including a reference to this document) to:
mcdocu.comments@infineon.com
Data Sheet V1.2, 2007-03

XC164GM
Derivatives
Table of Contents
Table of Contents
1 Summary of Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 General Device Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Pin Configuration and Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1 Memory Subsystem and Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Central Processing Unit (CPU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Interrupt System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4 On-Chip Debug Support (OCDS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.5 Capture/Compare Unit (CAPCOM2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.6 General Purpose Timer (GPT12E) Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.7 Real Time Clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.8 A/D Converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.9 Asynchronous/Synchronous Serial Interfaces (ASC0/ASC1) . . . . . . . . . . 36
3.10 High Speed Synchronous Serial Channels (SSC0/SSC1) . . . . . . . . . . . . 37
3.11 TwinCAN Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.12 LXBus Controller (EBC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.13 Watchdog Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.14 Clock Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.15 Parallel Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.16 Power Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.17 Instruction Set Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4 Electrical Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.1 General Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2 DC Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3 Analog/Digital Converter Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.4 AC Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.4.1 Definition of Internal Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.4.2 On-chip Flash Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.4.3 External Clock Drive XTAL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5 Package and Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.1 Packaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.2 Flash Memory Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Data Sheet 3 V1.2, 2007-03

XC164GM16-Bit Single-Chip Microcontroller with C166SV2 Core
XC166 Family
1 Summary of Features
For a quick overview or reference, the XC164GM’s properties are listed here in a
condensed way.
• High Performance 16-bit CPU with 5-Stage Pipeline
– 25 ns Instruction Cycle Time at 40 MHz CPU Clock (Single-Cycle Execution)
– 1-Cycle Multiplication (16 × 16 bit), Background Division (32 / 16 bit) in 21 Cycles
– 1-Cycle Multiply-and-Accumulate (MAC) Instructions
– Enhanced Boolean Bit Manipulation Facilities
– Zero-Cycle Jump Execution
– Additional Instructions to Support HLL and Operating Systems
– Register-Based Design with Multiple Variable Register Banks
– Fast Context Switching Support with Two Additional Local Register Banks
– 16 Mbytes Total Linear Address Space for Code and Data
– 1024 Bytes On-Chip Special Function Register Area (C166 Family Compatible)
• 16-Priority-Level Interrupt System with up to 63 Sources, Sample-Rate down to 50 ns
• 8-Channel Interrupt-Driven Single-Cycle Data Transfer Facilities via
Peripheral Event Controller (PEC), 24-Bit Pointers Cover Total Address Space
• Clock Generation via on-chip PLL (factors 1:0.15 … 1:10), or
via Prescaler (factors 1:1 … 60:1)
• On-Chip Memory Modules
– 2 Kbytes On-Chip Dual-Port RAM (DPRAM)
– 0/2/4 Kbytes
– 2 Kbytes On-Chip Program/Data SRAM (PSRAM)
– 32/64/128
• On-Chip Peripheral Modules
– 14-Channel A/D Converter with Programmable Resolution (10-bit or 8-bit) and
Conversion Time (down to 2.55 μs or 2.15 μs)
– 16-Channel General Purpose Capture/Compare Unit (CAPCOM2)
– Multi-Functional General Purpose Timer Unit with 5 Timers
– Two Synchronous/Asynchronous Serial Channels (USARTs)
– Two High-Speed-Synchronous Serial Channels
– On-Chip TwinCAN Interface (Rev. 2.0B active) with 32 Message Objects
(Full CAN/Basic CAN) on Two CAN Nodes, and Gateway Functionality
– On-Chip Real Time Clock, Driven by the Main Oscillator
• Idle, Sleep, and Power Down Modes with Flexible Power Management
1)
On-Chip Data SRAM (DSRAM)
1)
Kbytes On-Chip Program Memory (Flash Memory)
1) Depends on the respective derivative. See Table 1 “XC164GM Derivative Synopsis” on Page 6.
Data Sheet 4 V1.2, 2007-03
XC164GM
Derivatives
Summary of Features
• Programmable Watchdog Timer and Oscillator Watchdog
• Up to 47 General Purpose I/O Lines,
partly with Selectable Input Thresholds and Hysteresis
• On-Chip Bootstrap Loader
• On-Chip Debug Support via JTAG Interface
• 64-Pin Green LQFP Package for the -16F derivatives, 0.5 mm (19.7 mil) pitch (RoHS
compliant)
• 64-Pin TQFP Package for the -4F/8F derivatives, 0.5 mm (19.7 mil) pitch (RoHS
compliant)
Ordering Information
The ordering code for Infineon microcontrollers provides an exact reference to the
required product. This ordering code identifies:
• the derivative itself, i.e. its function set, the temperature range, and the supply voltage
• the package and the type of delivery.
For the available ordering codes for the XC164GM please refer to your responsible sales
representative or your local distributor.
This document describes several derivatives of the XC164GM group. Table 1
enumerates these derivatives and summarizes the differences. As this document refers
to all of these derivatives, some descriptions may not apply to a specific product.
For simplicity all versions are referred to by the term XC164GM throughout this
document.
Data Sheet 5 V1.2, 2007-03
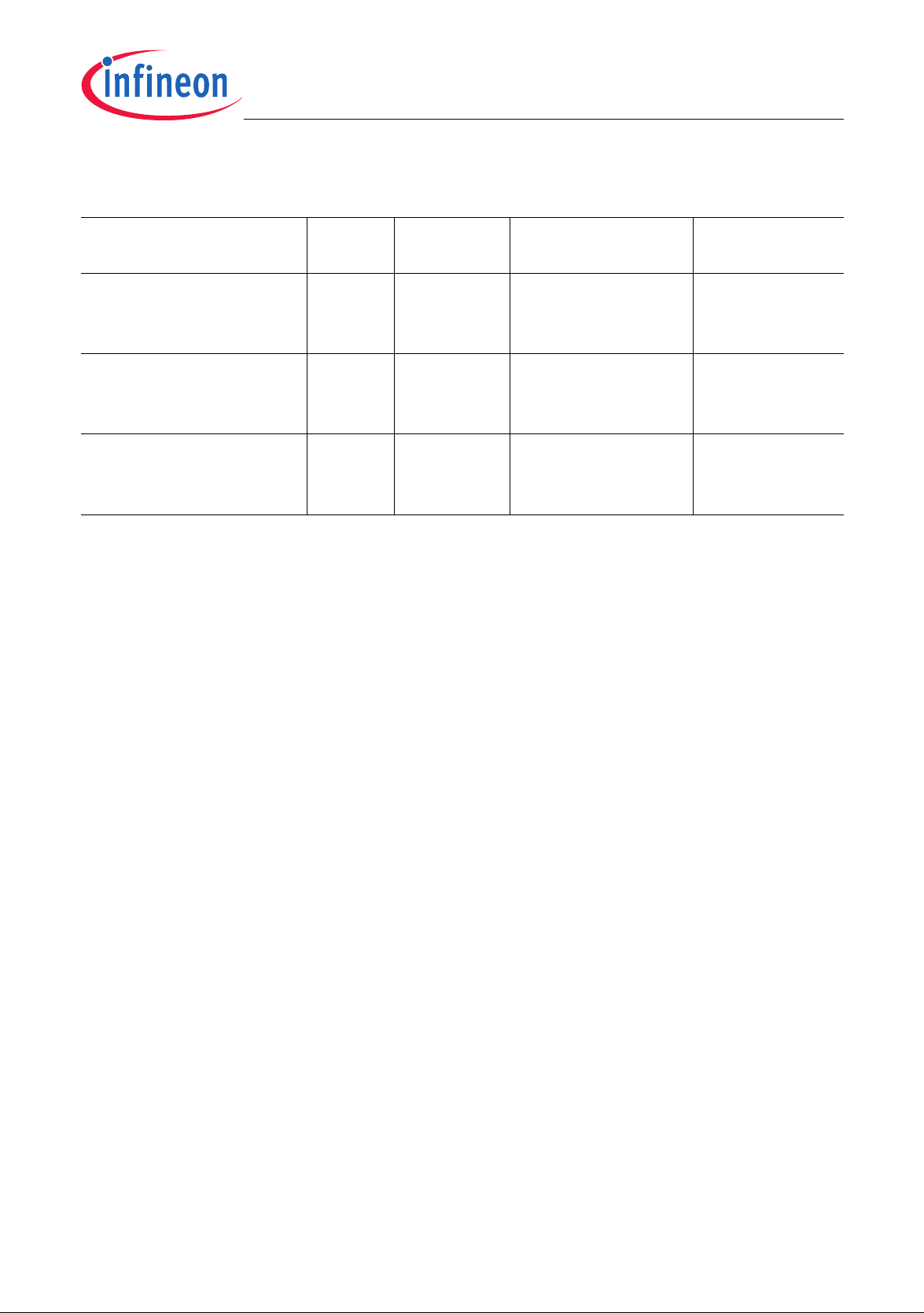
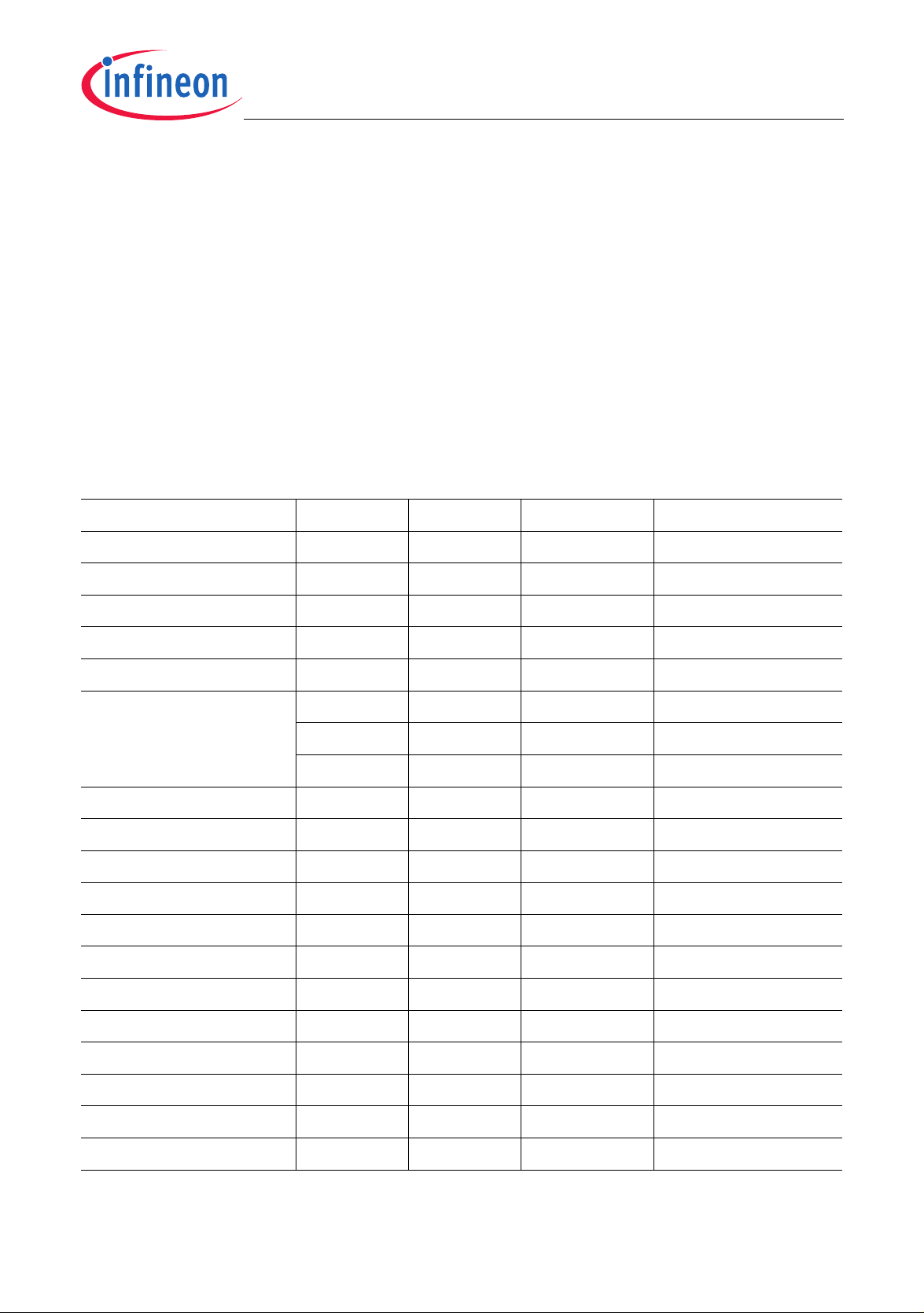
Table 1 XC164GM Derivative Synopsis
Derivative
1)
Temp.
Range
Program
Memory
XC164GM
Derivatives
Summary of Features
On-Chip RAM Interfaces
SAF-XC164GM-16F40F
SAF-XC164GM-16F20F
-40 to
85 °C
128 Kbytes
Flash
2 Kbytes DPRAM,
4 Kbytes DSRAM,
2 Kbytes PSRAM
SAF-XC164GM-8F40F
SAF-XC164GM-8F20F
-40 to
85 °C
64 Kbytes
Flash
2 Kbytes DPRAM,
2 Kbytes DSRAM,
2 Kbytes PSRAM
SAF-XC164GM-4F40F
SAF-XC164GM-4F20F
1) This Data Sheet is valid for:
devices starting with and including design step BA for the -16F derivatives, and for
devices starting with and including design step AA for -4F/8F derivatives.
-40 to
85 °C
32 Kbytes
Flash
2 Kbytes DPRAM,
2 Kbytes PSRAM
ASC0, ASC1,
SSC0, SSC1,
CAN0, CAN1
ASC0, ASC1,
SSC0, SSC1,
CAN0, CAN1
ASC0, ASC1,
SSC0, SSC1,
CAN0, CAN1
Data Sheet 6 V1.2, 2007-03
XC164GM
Derivatives
General Device Information
2 General Device Information
The XC164GM derivatives are high-performance members of the Infineon
XC166 Family of full featured single-chip CMOS microcontrollers. These devices extend
the functionality and performance of the C166 Family in terms of instructions (MAC unit),
peripherals, and speed. They combine high CPU performance (up to 40 million
instructions per second) with high peripheral functionality and enhanced IO-capabilities.
They also provide clock generation via PLL and various on-chip memory modules such
as program Flash, program RAM, and data RAM.
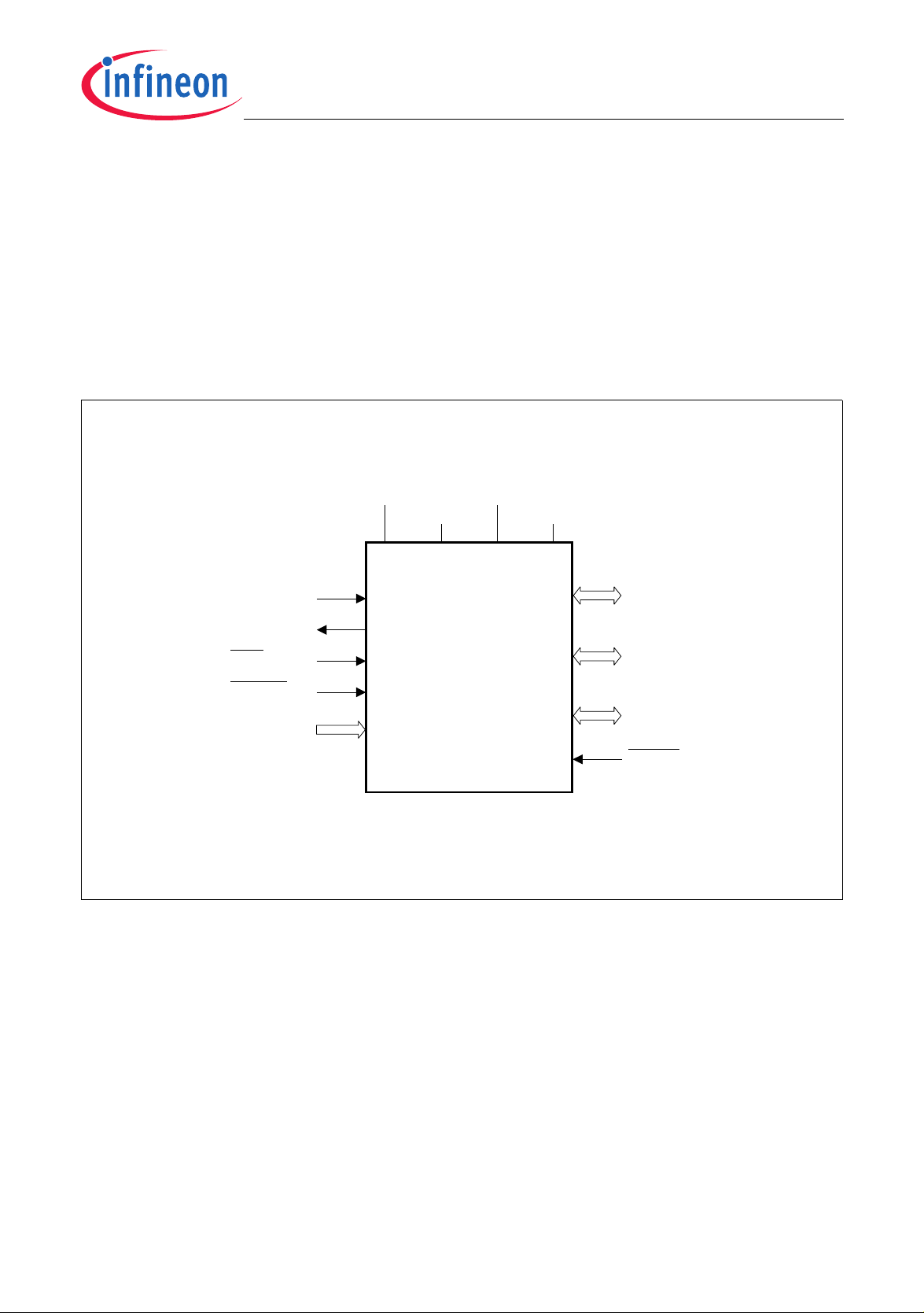
XTAL1
XTAL2
NMI
RSTIN
Port 5
14 bit
Figure 1 Logic Symbol
V
AREF
V
V
AGND
DDI/P
XC164GM
V
SS
PORT1
14 bit
Port 3
15 bit
Port 9
6 bit
TRST
MCA05554_XC164GM
Data Sheet 7 V1.2, 2007-03
XC164GM
*
*
Derivatives
General Device Information
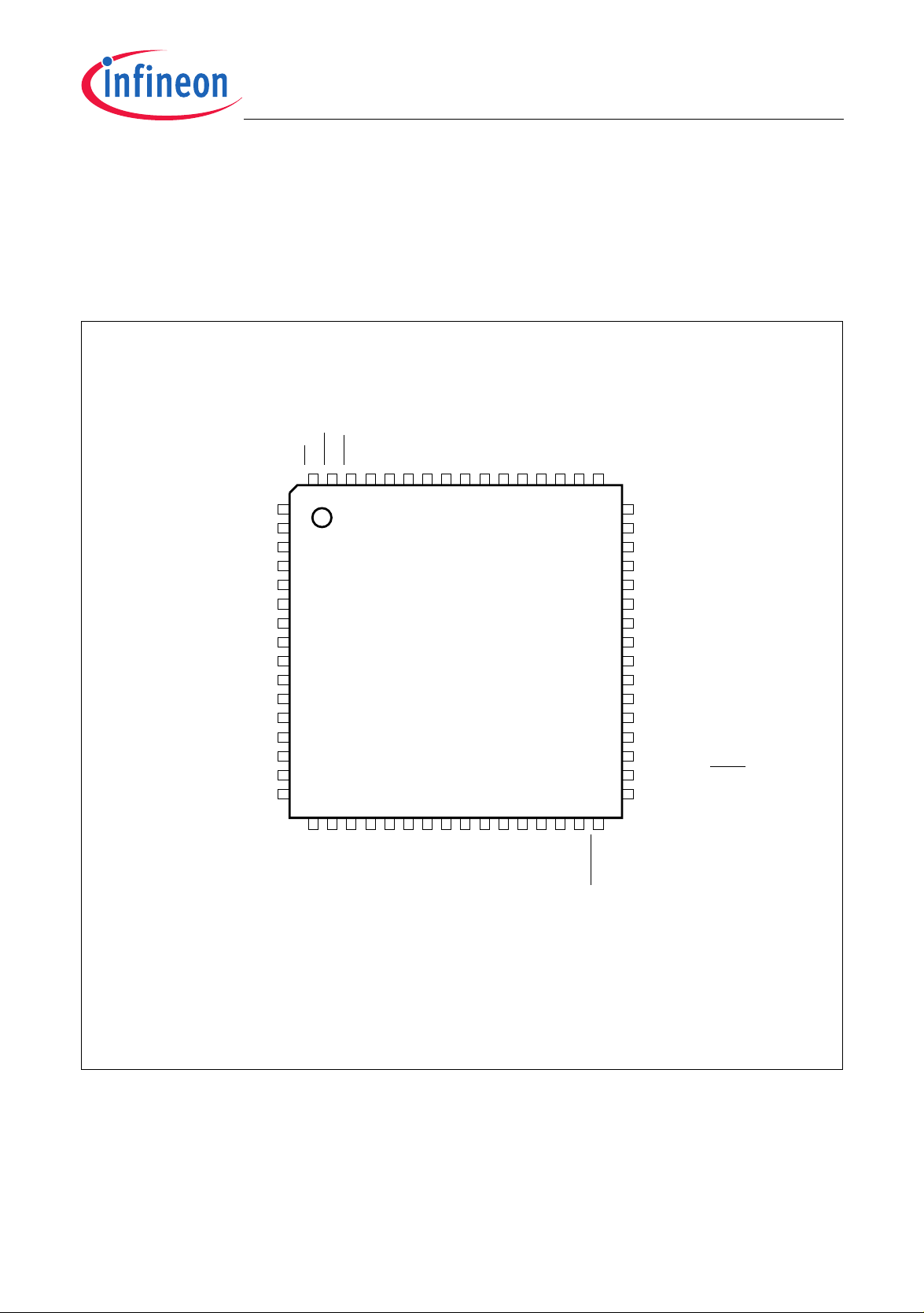
2.1 Pin Configuration and Definition
The pins of the XC164GM are described in detail in Table 2, including all their alternate
functions. Figure 2 summarizes all pins in a condensed way, showing their location on
the 4 sides of the package. E* marks pins to be used as alternate external interrupt
inputs.
DDP
DDI
SS
V
TRST
RSTIN
NMI
V
XTAL1
XTAL2
P1 L.6
P1L.7/CC22IO
V
P1L.3
P1L.4
P1L.5
P1L.0
P1L.1
P1L.2
P1 H. 0/ EX0I N/ CC 23 IO
P1 H. 1/ EX1I N/ MR ST1
P1 H. 2/ EX2I N/ MT RS1
P1 H. 3/ EX3I N/ T7I N/ SCL K1
P1H.4/CC24IO/EX4IN
5
I
/
E
5
X
I
O
2
C
5
/
C
.
P
1
H
V
SS
V
DDP
P5.0/AN0
P5.1/AN1
P5.2/AN2
P5.3/AN3
P5.4/AN4
P5.5/AN5
P5.10/AN10/T6EUD
P5.11/AN11/T5EUD
49505152535455565758596061626364
P9.5/CC21IO
1
2
3
4
5
N
6
7
8
9
XC164GM
10
11
12
13
14
15
16
48
P9.4/CC20IO
47
46
P9.3/CC19IO/CAN1_TxD
P9.2/CC18IO/CAN1_RxD/E
45
P9.1/CC17IO/CAN2_TxD
44
43
P9.0/CC16IO/CAN2_RxD/E
42
P3.15/CLKOUT/FOUT
V
41
SS
40
V
DDP
39
P3 .1 3/SC LK0 /E*
P3.11/RxD0/E*
38
P3.10/TxD0/E*
37
P3 .9 /M TSR 0
36
P3 .8 /M RST0
35
34
P3 .7 /T 2I N/ BRKIN
33
P3 .6 /T 3I N
32313029282726252423222120191817
SS
DDI
AREF
AGND
V
V
P5.6/AN6
P5.7/AN7
P5.12/AN12/T6IN
P5.13/AN13/T5IN
P5.14/AN14/T4EUD
P5.15/AN15/T2EUD
DDP
V
V
V
P3.2/CAPIN/TDI
P3.3/T3OUT/TDO
P3.4/T3EUD/TMS
P3.1/T6OUT/RxD1/TCK/E*
P3.5/T4IN/TxD1/BRKOUT
mc_xc164gm_pinout .vsd
Figure 2 Pin Configuration (top view)
Data Sheet 8 V1.2, 2007-03
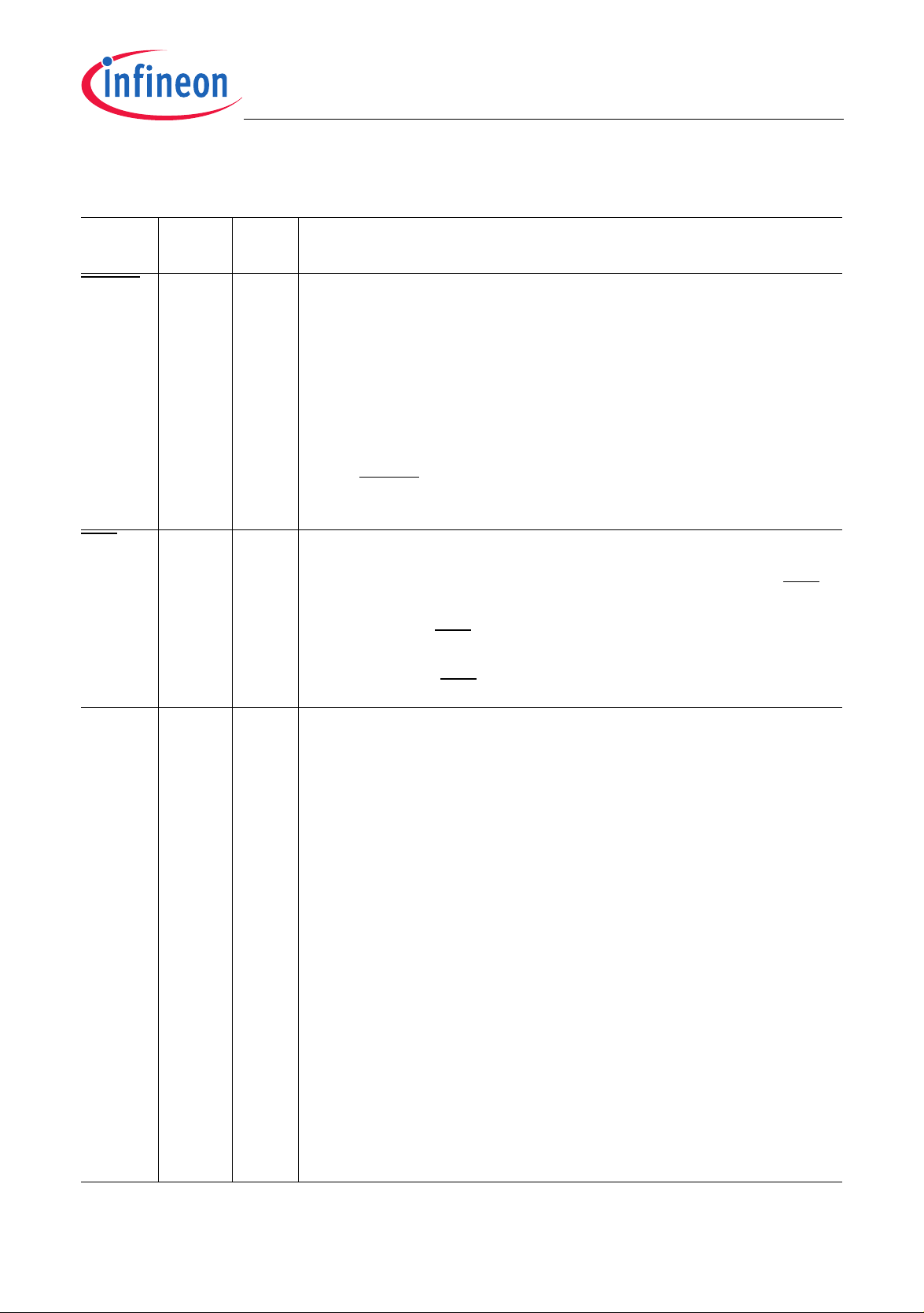
Table 2 Pin Definitions and Functions
XC164GM
Derivatives
General Device Information
Symbol
Pin
Num.
Input
Outp.
Function
RSTIN 63 I Reset Input with Schmitt-Trigger characteristics. A low-level
at this pin while the oscillator is running resets the XC164GM.
A spike filter suppresses input pulses < 10 ns. Input pulses
> 100 ns safely pass the filter. The minimum duration for a
safe recognition should be 100 ns + 2 CPU clock cycles.
Note: The reset duration must be sufficient to let the
hardware configuration signals settle.
External circuitry must guarantee low-level at the
RSTIN
pin at least until both power supply voltages
have reached the operating range.
NMI
64 I Non-Maskable Interrupt Input. A high to low transition at this
pin causes the CPU to vector to the NMI trap routine. When
the PWRDN (power down) instruction is executed, the NMI
pin must be low in order to force the XC164GM into power
down mode. If NMI
is high, when PWRDN is executed, the
part will continue to run in normal mode.
If not used, pin NMI
should be pulled high externally.
Port 9
P9.0
P9.1
P9.2
P9.3
P9.4
P9.5
43-48
43
44
45
46
47
48
IO
I/O
I
I
I/O
O
I/O
I
I
I/O
O
I/O
I/O
Port 9 is a 6-bit bidirectional I/O port. Each pin can be
programmed for input (output driver in high-impedance state)
or output (configurable as push/pull or open drain driver). The
input threshold of Port 9 is selectable (standard or special).
The following Port 9 pins also serve for alternate functions:
CC16IO: (CAPCOM2) CC16 Capture Inp./Compare Outp.,
CAN2_RxD: (CAN Node 2) Receive Data Input
1)
,
EX5IN: (Fast External Interrupt 5) Input (alternate pin A)
CC17IO: (CAPCOM2) CC17 Capture Inp./Compare Outp.,
CAN2_TxD: (CAN Node 2) Transmit Data Output,
CC18IO: (CAPCOM2) CC18 Capture Inp./Compare Outp.,
CAN1_RxD: (CAN Node 1) Receive Data Input
1)
,
EX4IN: (Fast External Interrupt 4) Input (alternate pin A)
CC19IO: (CAPCOM2) CC19 Capture Inp./Compare Outp.,
CAN1_TxD: (CAN Node 1) Transmit Data Output,
CC20IO: (CAPCOM2) CC20 Capture Inp./Compare Outp.
CC21IO: (CAPCOM2) CC21 Capture Inp./Compare Outp.
Note: At the end of an external reset P9.4 and P9.5 also may
input startup configuration values.
Data Sheet 9 V1.2, 2007-03
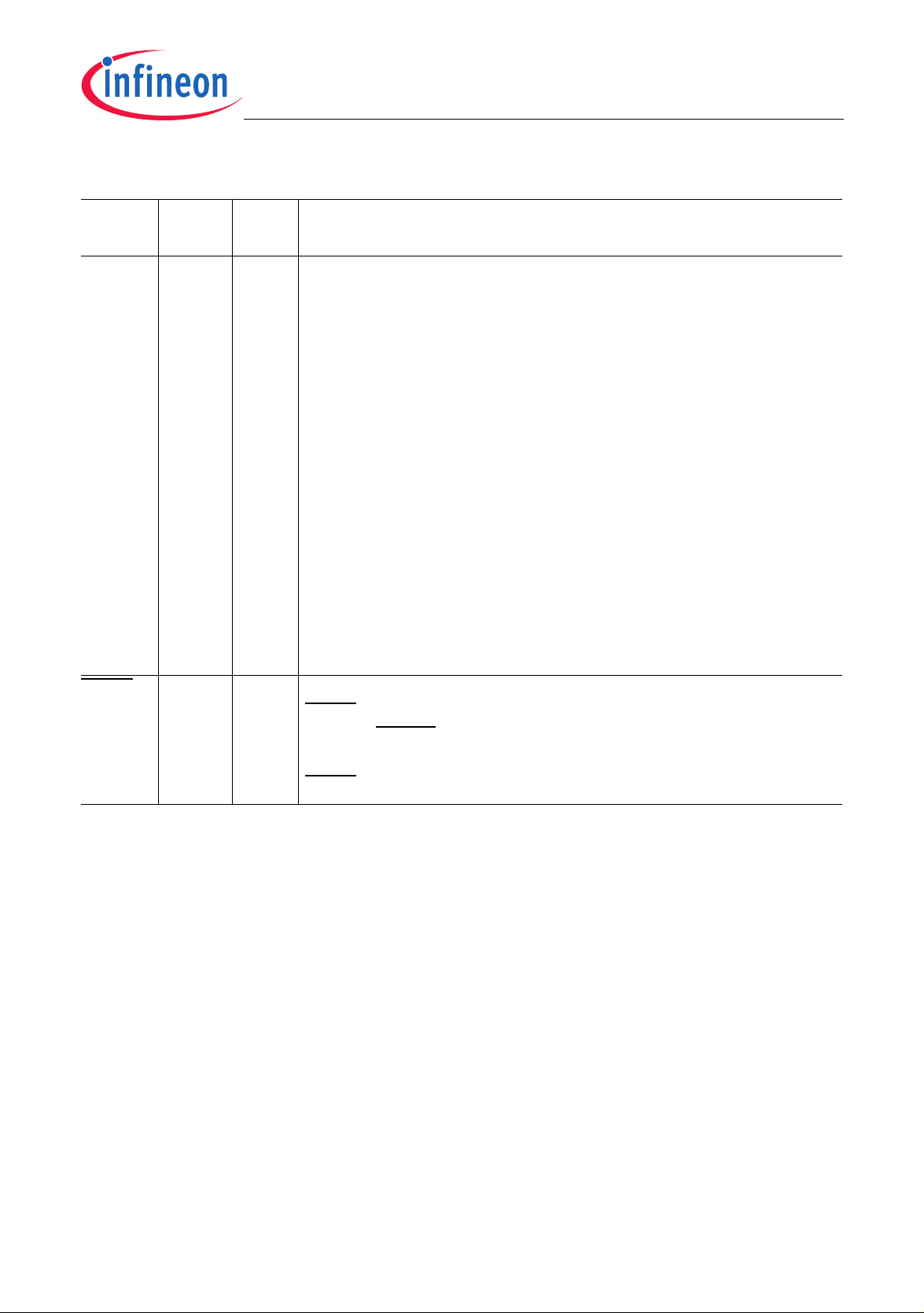
Table 2 Pin Definitions and Functions (cont’d)
XC164GM
Derivatives
General Device Information
Symbol
Port 5
P5.0
P5.1
P5.2
P5.3
P5.4
P5.5
P5.10
P5.11
P5.6
P5.7
P5.12
P5.13
P5.14
P5.15
Pin
Num.
9-18,
21-24
9
10
11
12
13
14
15
16
17
18
21
22
23
24
Input
Outp.
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Function
Port 5 is a 14-bit input-only port.
The pins of Port 5 also serve as analog input channels for the
A/D converter, or they serve as timer inputs:
AN0
AN1
AN2
AN3
AN4
AN5
AN10 (T6EUD): GPT2 Timer T6 Ext. Up/Down Ctrl. Inp.
AN11 (T5EUD): GPT2 Timer T5 Ext. Up/Down Ctrl. Inp.
AN6
AN7
AN12 (T6IN): GPT2 Timer T6 Count/Gate Input
AN13 (T5IN): GPT2 Timer T5 Count/Gate Input
AN14 (T4EUD): GPT1 Timer T4 Ext. Up/Down Ctrl. Inp.
AN15 (T2EUD): GPT1 Timer T2 Ext. Up/Down Ctrl. Inp.
TRST
62 I Test-System Reset Input. For normal system operation, pin
TRST
edge of RSTIN
should be held low. A high level at this pin at the rising
enables the hardware configuration and
activates the XC164GM’s debug system. In this case, pin
TRST
must be driven low once to reset the debug system.
Data Sheet 10 V1.2, 2007-03
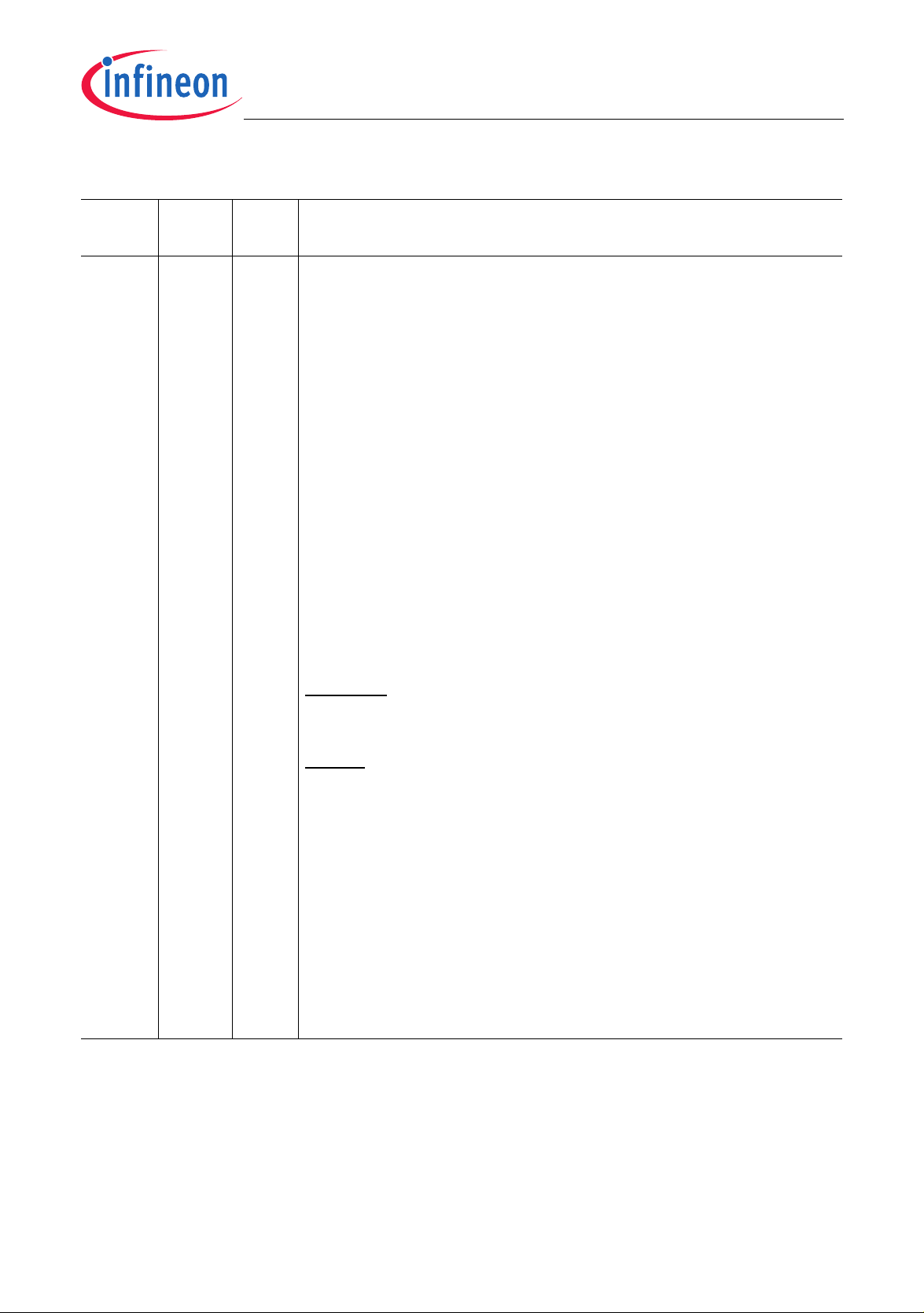
Table 2 Pin Definitions and Functions (cont’d)
XC164GM
Derivatives
General Device Information
Symbol
Port 3
P3.1
P3.2
P3.3
P3.4
P3.5
P3.6
P3.7
P3.8
P3.9
P3.10
P3.11
P3.13
P3.15
Pin
Num.
28-39,
42
28
29
30
31
32
33
34
35
36
37
38
39
42
Input
Outp.
IO
O
I/O
I
I
I
I
O
O
I
I
I
O
O
I
I
I
I/O
I/O
O
I
I/O
I
I/O
I
O
O
Function
Port 3 is a 13-bit bidirectional I/O port. Each pin can be
programmed for input (output driver in high-impedance state)
or output (configurable as push/pull or open drain driver). The
input threshold of Port 3 is selectable (standard or
special).The following Port 3 pins also serve for alternate
functions:
T6OUT: [GPT2] Timer T6 Toggle Latch Output,
RxD1: [ASC1] Data Input (Async.) or Inp./Outp. (Sync.),
EX1IN: [Fast External Interrupt 1] Input (alternate pin A),
TCK: [Debug System] JTAG Clock Input
CAPIN: [GPT2] Register CAPREL Capture Input,
TDI: [Debug System] JTAG Data In
T3OUT: [GPT1] Timer T3 Toggle Latch Output,
TDO: [Debug System] JTAG Data Out
T3EUD: [GPT1] Timer T3 External Up/Down Control Input,
TMS: [Debug System] JTAG Test Mode Selection
T4IN: [GPT1] Timer T4 Count/Gate/Reload/Capture Inp.
TxD1: [ASC0] Clock/Data Output (Async./Sync.),
BRKOUT
: [Debug System] Break Out
T3IN: [GPT1] Timer T3 Count/Gate Input
T2IN: [GPT1] Timer T2 Count/Gate/Reload/Capture Inp.
BRKIN
: [Debug System] Break In
MRST0: [SSC0] Master-Receive/Slave-Transmit In/Out.
MTSR0: [SSC0] Master-Transmit/Slave-Receive Out/In.
TxD0: [ASC0] Clock/Data Output (Async./Sync.),
EX2IN: [Fast External Interrupt 2] Input (alternate pin B)
RxD0: [ASC0] Data Input (Async.) or Inp./Outp. (Sync.),
EX2IN: [Fast External Interrupt 2] Input (alternate pin A)
SCLK0: [SSC0] Master Clock Output / Slave Clock Input.,
EX3IN: [Fast External Interrupt 3] Input (alternate pin A)
CLKOUT: System Clock Output (= CPU Clock),
FOUT: Programmable Frequency Output
Data Sheet 11 V1.2, 2007-03
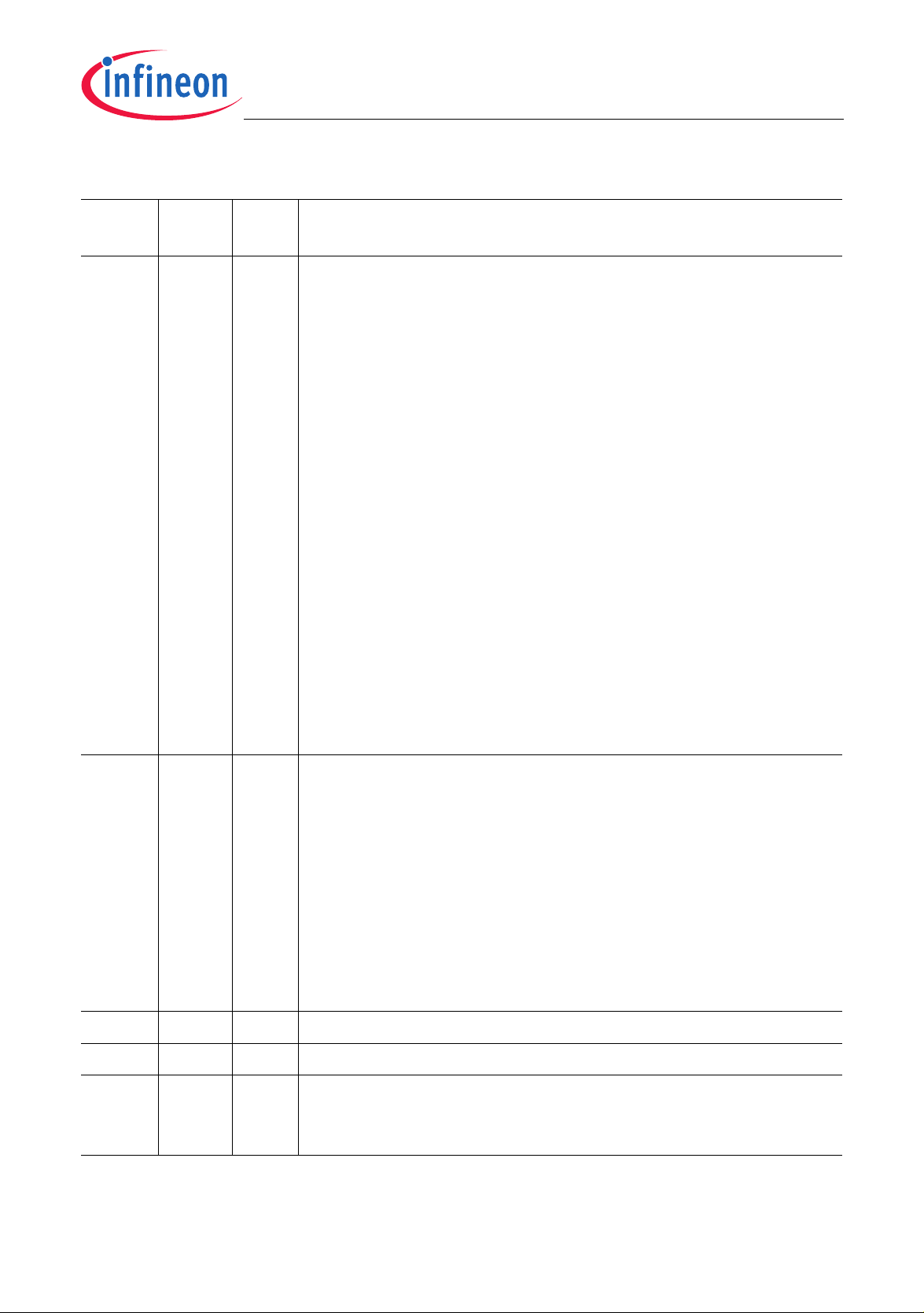
Table 2 Pin Definitions and Functions (cont’d)
XC164GM
Derivatives
General Device Information
Symbol
PORT1
P1L.7
P1H.0
P1H.1
P1H.2
P1H.3
P1H.4
P1H.5
Pin
Num.
1-6,
49-56
56
1
2
3
3
5
6
Input
Outp.
IO
I/O
I
I/O
I
I/O
I
I/O
I
I/O
I
I/O
I
I/O
I
Function
PORT1 consists of one 8-bit and one 6-bit bidirectional I/O
port P1L and P1H. Each pin can be programmed for input
(output driver in high-impedance state) or output.
The following PORT1 pins also serve for alt. functions:
CC22IO: [CAPCOM2] CC22 Capture Inp./Compare Outp.
EX0IN: [Fast External Interrupt 0] Input (default pin),
CC23IO: [CAPCOM2] CC23 Capture Inp./Compare Outp.
EX1IN: [Fast External Interrupt 1] Input (default pin),
MRST1: [SSC1] Master-Receive/Slave-Transmit In/Out.
EX2IN: [Fast External Interrupt 2] Input (default pin),
MTSR1: [SSC1] Master-Transmit/Slave-Receive Out/Inp.
T7IN: [CAPCOM2] Timer T7 Count Input,
SCLK1: [SSC1] Master Clock Output / Slave Clock Input,
EX3IN: [Fast External Interrupt 3] Input (default pin),
CC24IO: [CAPCOM2] CC24 Capture Inp./Compare Outp.,
EX4IN: [Fast External Interrupt 4] Input (default pin)
CC25IO: [CAPCOM2] CC25 Capture Inp./Compare Outp.,
EX5IN: [Fast External Interrupt 5] Input (default pin)
XTAL2
XTAL16160
V
V
V
AREF
AGND
DDI
19 – Reference voltage for the A/D converter
20 – Reference ground for the A/D converter
26, 58 – Digital Core Supply Voltage (On-Chip Modules):
O
I
Note: At the end of an external reset P1H.4 and P1H.5 also
may input startup configuration values
XTAL2: Output of the oscillator amplifier circuit
XTAL1: Input to the oscillator amplifier and input to the
internal clock generator
To clock the device from an external source, drive XTAL1,
while leaving XTAL2 unconnected. Minimum and maximum
high/low and rise/fall times specified in the AC Characteristics
must be observed.
Note: Input pin XTAL1 belongs to the core voltage domain.
Therefore, input voltages must be within the range
defined for
V
DDI
.
+2.5 V during normal operation and idle mode.
Please refer to the Operating Condition Parameters
Data Sheet 12 V1.2, 2007-03
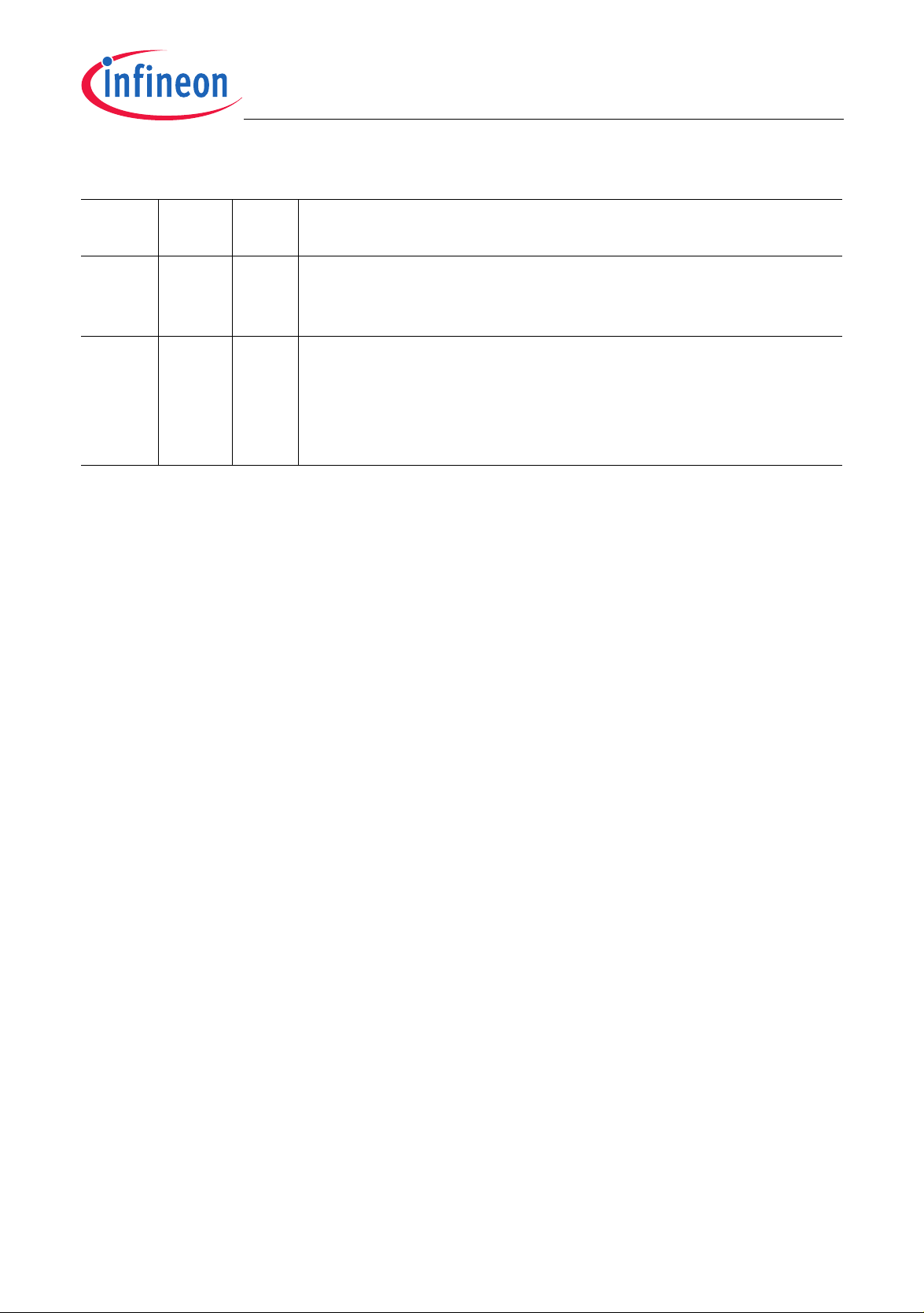
Table 2 Pin Definitions and Functions (cont’d)
XC164GM
Derivatives
General Device Information
Symbol
V
DDP
Pin
Num.
8, 27,
40, 57
Input
Function
Outp.
– Digital Pad Supply Voltage (Pin Output Drivers):
+5 V during normal operation and idle mode.
Please refer to the Operating Condition Parameters
V
SS
7, 25,
41, 59
– Digital Ground
Connect decoupling capacitors to adjacent
as close as possible to the pins.
All
V
pins must be connected to the ground-line or ground-
SS
plane.
1) The CAN interface lines are assigned to port P9 under software control.
V
DD/VSS
pin pairs
Data Sheet 13 V1.2, 2007-03
XC164GM
d
Derivatives
Functional Description
3 Functional Description
The architecture of the XC164GM combines advantages of RISC, CISC, and DSP
processors with an advanced peripheral subsystem in a very well-balanced way. In
addition, the on-chip memory blocks allow the design of compact systems-on-silicon with
maximum performance (computing, control, communication).
The on-chip memory blocks (program code-memory and SRAM, dual-port RAM, data
SRAM) and the set of generic peripherals are connected to the CPU via separate buses.
Another bus, the LXBus, connects additional on-chip resources (see Figure 3).
This bus structure enhances the overall system performance by enabling the concurrent
operation of several subsystems of the XC164GM.
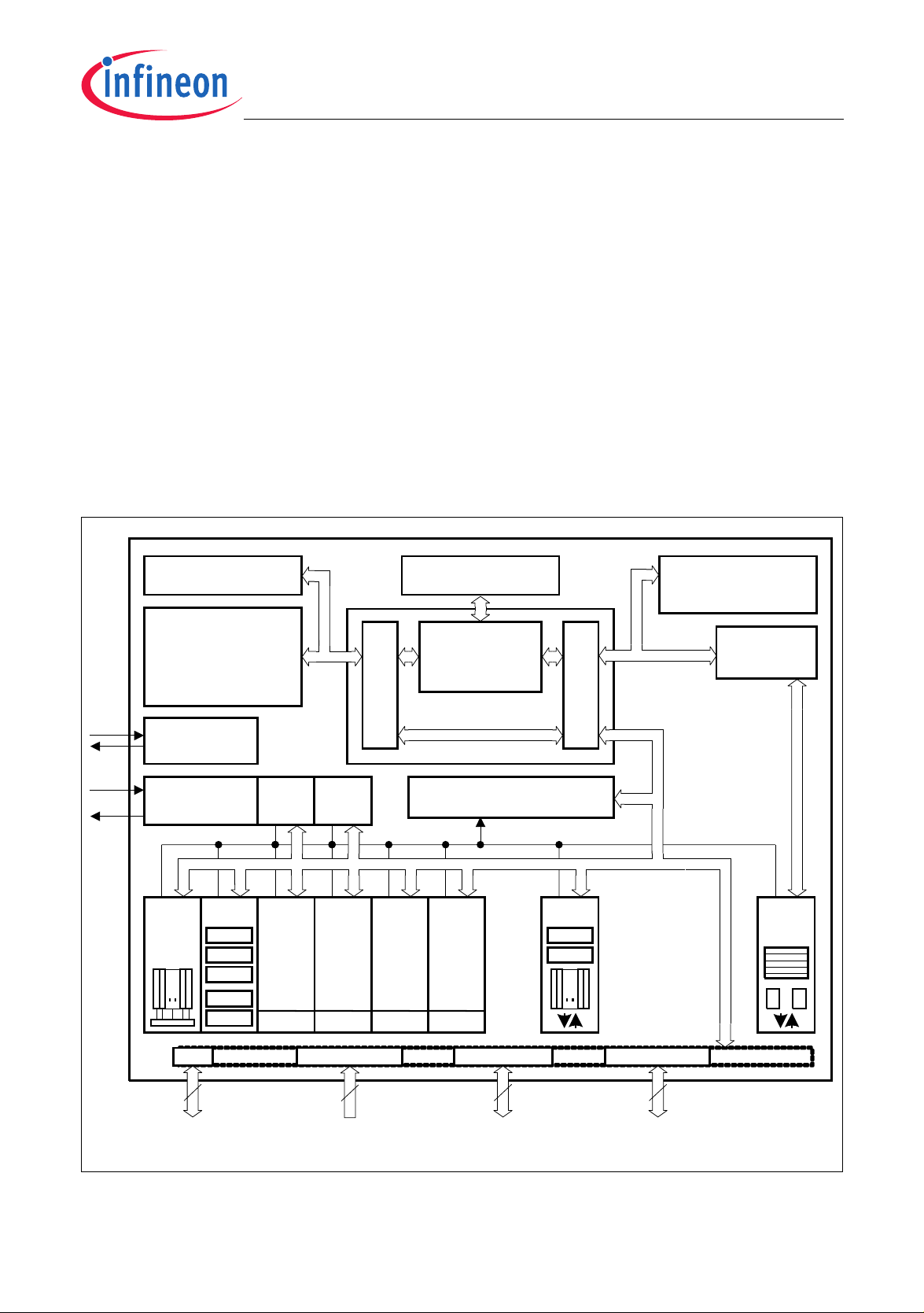
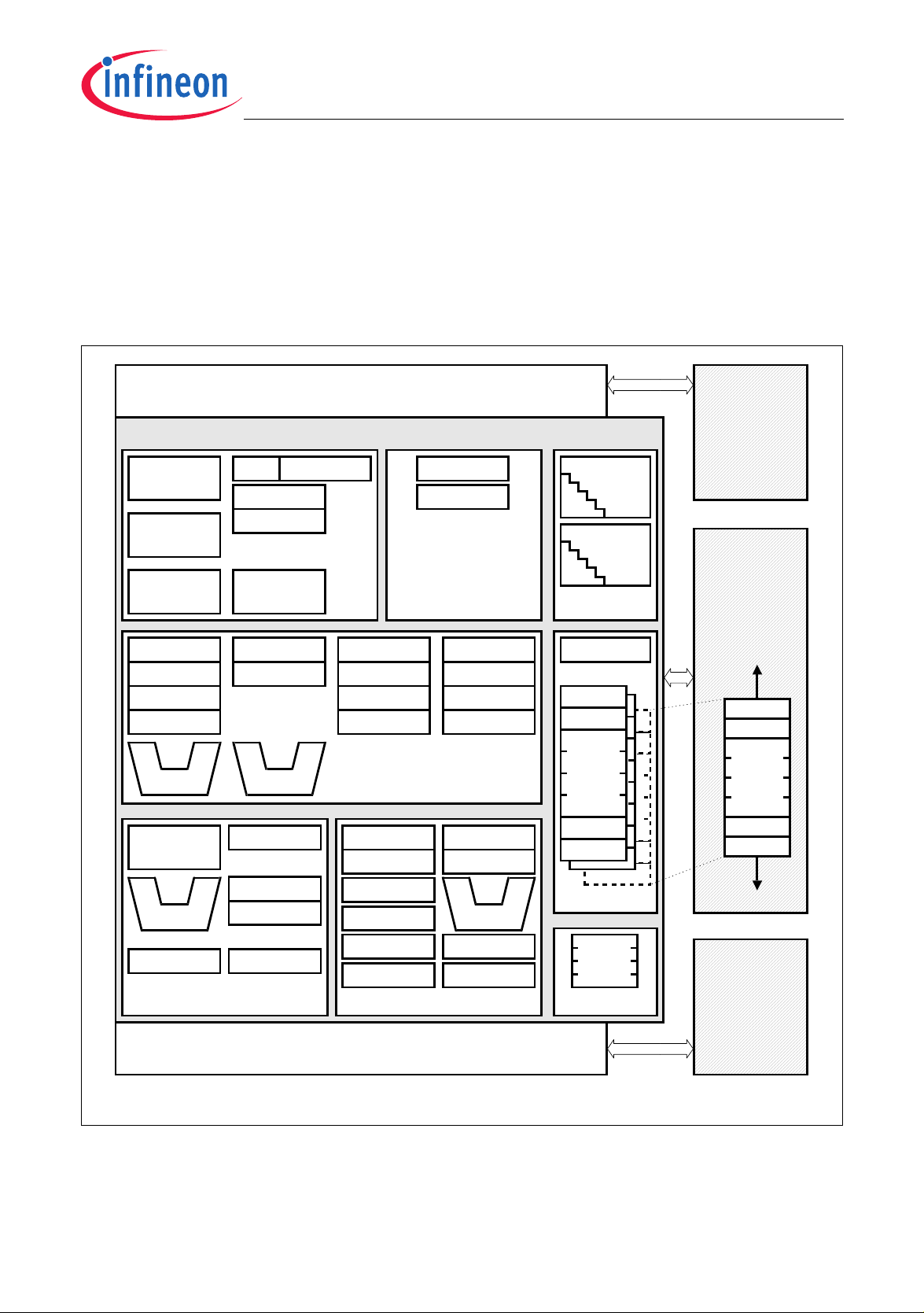
The following block diagram gives an overview of the different on-chip components and
of the advanced, high bandwidth internal bus structure of the XC164GM.
XTAL
PSRAM
2 Kbytes
ProgMem
Flash
32/64/128 Kbytes
OCDS
Debug Support
Osc / PLL
Clock Generation
ADC
8/10-Bit
C hannels
GPT
14
T2
T3
T4
T5
T6
RTC WDT
ASC0
(USART)
BRGen
ASC1
(USART)
BRGen
PMU
SSC0
(SPI)
BRGen
DPRAM
2 Kbytes
CPU
C166SV2-Core
Interrupt & PEC
SSC1
(SPI)
BRGen
DMU
Interrupt B us
P eripheral Dat a Bus
CC2
T7
T8
DSRAM
0/2/4 Kbytes
reduced
LXBus
EBC
Control
Twin
LXBus
CAN
A B
Port 5
6
14
13
POR T1Port 3Port 9
14
Mc_xc164gm_block1.vs
Figure 3 Block Diagram
Data Sheet 14 V1.2, 2007-03

XC164GM
Derivatives
Functional Description
3.1 Memory Subsystem and Organization
The memory space of the XC164GM is configured in a von Neumann architecture, which
means that all internal and external resources, such as code memory, data memory,
registers and I/O ports, are organized within the same linear address space. This
common memory space includes 16 Mbytes and is arranged as 256 segments of
64 Kbytes each, where each segment consists of four data pages of 16 Kbytes each.
The entire memory space can be accessed byte wise or word wise. Portions of the
on-chip DPRAM and the register spaces (E/SFR) have additionally been made directly
bit addressable.
The internal data memory areas and the Special Function Register areas (SFR and
ESFR) are mapped into segment 0, the system segment.
The Program Management Unit (PMU) handles all code fetches and, therefore, controls
accesses to the program memories, such as Flash memory and PSRAM.
The Data Management Unit (DMU) handles all data transfers and, therefore, controls
accesses to the DSRAM and the on-chip peripherals.
Both units (PMU and DMU) are connected via the high-speed system bus to exchange
data. This is required if operands are read from program memory, code or data is written
to the PSRAM, or data is read from or written to peripherals on the LXBus (such as
TwinCAN). The system bus allows concurrent two-way communication for maximum
transfer performance.
32/64/128 Kbytes
1)
of on-chip Flash memory store code or constant data. The on-chip
Flash memory is organized as four 8-Kbyte sectors and up to three 32-Kbyte sectors.
Each sector can be separately write protected
2)
, erased and programmed (in blocks of
128 Bytes). The complete Flash area can be read-protected. A password sequence
temporarily unlocks protected areas. The Flash module combines very fast 64-bit onecycle read accesses with protected and efficient writing algorithms for programming and
erasing. Thus, program execution out of the internal Flash results in maximum
performance. Dynamic error correction provides extremely high read data security for all
read accesses.
Programming typically takes 2 ms per 128-byte block (5 ms max.), erasing a sector
typically takes 200 ms (500 ms max.).
2 Kbytes of on-chip Program SRAM (PSRAM) are provided to store user code or data.
The PSRAM is accessed via the PMU and is therefore optimized for code fetches.
0/2/4 Kbytes
1)
of on-chip Data SRAM (DSRAM) are provided as a storage for general
user data. The DSRAM is accessed via the DMU and is therefore optimized for data
accesses. DSRAM is not available in the XC164GM-4F derivatives.
1) Depends on the respective derivative. See Table 1 “XC164GM Derivative Synopsis” on Page 6.
2) Each two 8-Kbyte sectors are combined for write-protection purposes.
Data Sheet 15 V1.2, 2007-03
XC164GM
Derivatives
Functional Description
2 Kbytes of on-chip Dual-Port RAM (DPRAM) are provided as a storage for user
defined variables, for the system stack, general purpose register banks. A register bank
can consist of up to 16 word wide (R0 to R15) and/or byte wide (RL0, RH0, …, RL7, RH7)
so-called General Purpose Registers (GPRs).
The upper 256 bytes of the DPRAM are directly bit addressable. When used by a GPR,
any location in the DPRAM is bit addressable.
1024 bytes (2 × 512 bytes) of the address space are reserved for the Special Function
Register areas (SFR space and ESFR space). SFRs are word wide registers which are
used for controlling and monitoring functions of the different on-chip units. Unused SFR
addresses are reserved for future members of the XC166 Family. Therefore, they should
either not be accessed, or written with zeros, to ensure upward compatibility.
Table 3 XC164GM Memory Map
Address Area Start Loc. End Loc. Area Size
Flash register space FF’F000
H
FF’FFFF
H
4 Kbytes
1)
Notes
2)
Reserved (Acc. trap) F8’0000
Reserved for PSRAM E0’0800
Program SRAM E0’0000
Reserved for pr. mem. C2’0000
Program Flash C0’0000
C0’0000
C0’0000
Reserved 20’0800
TwinCAN registers 20’0000
Reserved 01’0000
SFR area 00’FE00
Dual-Port RAM 00’F600
Reserved for DPRAM 00’F200
ESFR area 00’F000
XSFR area 00’E000
H
H
H
H
H
H
H
H
H
H
H
H
H
H
H
FF’FFFF
F7’FFFF
E0’07FF
DF’FFFF
C1’FFFF
C0’FFFF
C0’7FFF
BF’FFFF
20’07FF
1F’FFFF
00’FFFF
00’FDFF
00’F5FF
00’F1FF
00’EFFF
508 Kbytes –
H
< 1.5 Mbytes Minus PSRAM
H
2 Kbytes –
H
< 2 Mbytes Minus Flash
H
128 Kbytes XC164GM-16F
H
64 Kbytes XC164GM-8F
H
32 Kbytes XC164GM-4F
H
< 10 Mbytes Minus TwinCAN
H
2 Kbytes Accessed via EBC
H
< 2 Mbytes Minus segment 0
H
0.5 Kbyte –
H
2 Kbytes –
H
1 Kbyte –
H
0.5 Kbyte –
H
4 Kbytes –
H
Reserved 00’D000
Data SRAM 00’C000
Reserved for DSRAM 00’8000
Reserved 00’0000
1) The areas marked with “<” are slightly smaller than indicated, see column “Notes”.
H
H
H
H
00’DFFF
00’CFFF
00’BFFF
00’7FFF
6 Kbytes –
H
4 Kbytes
H
16 Kbytes –
H
32 Kbytes –
H
3)
Data Sheet 16 V1.2, 2007-03

XC164GM
Derivatives
Functional Description
2) Not defined register locations return a trap code (1E9BH).
3) Depends on the respective derivative. See Table 1 “XC164GM Derivative Synopsis” on Page 6.
Data Sheet 17 V1.2, 2007-03
XC164GM
Derivatives
Functional Description
3.2 Central Processing Unit (CPU)
The main core of the CPU consists of a 5-stage execution pipeline with a 2-stage
instruction-fetch pipeline, a 16-bit arithmetic and logic unit (ALU), a 32-bit/40-bit multiply
and accumulate unit (MAC), a register-file providing three register banks, and dedicated
SFRs. The ALU features a multiply and divide unit, a bit-mask generator, and a barrel
shifter.
CPU
Prefetch
Branch
Multiply
Unit
Unit
FIFO
IDX0
IDX1
QX0
QX1
+/-
Unit
+/-
CSP IP
CPUCON1
CPUCON2
Return
Stack
QR0
QR1
+/-
MRW
MCW
MSW
IFU
DPP0
DPP1
DPP2
DPP3
Division Unit
M u ltiply U n it
MDC
PSW
VECSEG
TFR
Injection/
Exception
Handler
SPSEG
SP
STKOV
STKUN
Bit-Mask-Gen.
Barrel-Shifter
+/-
ADU
PMU
2-Stage
5-Stage
R15
R14
GPRs
GPRs
RF
Prefetch
Pipeline
Pipeline
CP
R15
R15
R14
R14
GPRs
R1
R1
R0
R1
R0
R0
PSRAM
Flash/ROM
DPRAM
IPIP
R15
R14
GPRs
R1
R0
MAC
MAH
MAL
MDH
ZEROS
MDL
ONES
ALU
Buffer
DMU
WB
DSRAM
EBC
Peripherals
mca04917_x.vsd
Figure 4 CPU Block Diagram
Based on these hardware provisions, most of the XC164GM’s instructions can be
executed in just one machine cycle which requires 25 ns at 40 MHz CPU clock. For
Data Sheet 18 V1.2, 2007-03

XC164GM
Derivatives
Functional Description
example, shift and rotate instructions are always processed during one machine cycle
independent of the number of bits to be shifted. Also multiplication and most MAC
instructions execute in one single cycle. All multiple-cycle instructions have been
optimized so that they can be executed very fast as well: for example, a 32-/16-bit
division is started within 4 cycles, while the remaining 15 cycles are executed in the
background. Another pipeline optimization, the branch target prediction, allows
eliminating the execution time of branch instructions if the prediction was correct.
The CPU has a register context consisting of up to three register banks with 16 word
wide GPRs each at its disposal. One of these register banks is physically allocated within
the on-chip DPRAM area. A Context Pointer (CP) register determines the base address
of the active register bank to be accessed by the CPU at any time. The number of
register banks is only restricted by the available internal RAM space. For easy parameter
passing, a register bank may overlap others.
A system stack of up to 32 Kwords is provided as a storage for temporary data. The
system stack can be allocated to any location within the address space (preferably in the
on-chip RAM area), and it is accessed by the CPU via the stack pointer (SP) register.
Two separate SFRs, STKOV and STKUN, are implicitly compared against the stack
pointer value upon each stack access for the detection of a stack overflow or underflow.
The high performance offered by the hardware implementation of the CPU can efficiently
be utilized by a programmer via the highly efficient XC164GM instruction set which
includes the following instruction classes:
• Standard Arithmetic Instructions
• DSP-Oriented Arithmetic Instructions
• Logical Instructions
• Boolean Bit Manipulation Instructions
• Compare and Loop Control Instructions
• Shift and Rotate Instructions
• Prioritize Instruction
• Data Movement Instructions
• System Stack Instructions
• Jump and Call Instructions
• Return Instructions
• System Control Instructions
• Miscellaneous Instructions
The basic instruction length is either 2 or 4 bytes. Possible operand types are bits, bytes
and words. A variety of direct, indirect or immediate addressing modes are provided to
specify the required operands.
Data Sheet 19 V1.2, 2007-03
 Loading...
Loading...