

现货库存、技术资料、百科信息、热点资讯,精彩尽在鼎好!
Fault Tolerant Differential CAN-Transceiver TLE 6254-2G
Final Data Sheet
1 Features
• Data transmission rate up to 125 kBaud
• Very low current consumption in stand-by and sleep
operation mode
• Implemented receive-only mode
• Optimized EMC behavior
• Wake-up input pin, dual edge sensitive
• Battery fail flag
• Extended bus failure management to guarantee safe
operation during all bus line failure events
• Full support of dual failure conditions
• Fully wake-up capability during all bus line failures conditions
• Supports one-wire transmission mode with ground offset voltages up to 1.5 V
• Prevention from bus occupation in case of CAN controller failure
• Thermal protection
• Bus line error protection against transients in automotive environment
P-DSO-14-13
Type Ordering Code Package
TLE 6254-2G Q67006-A9549 P-DSO-14-13 (SMD)
2 Description
The CAN-Transceiver TLE 6254-2G works as the interface between the CAN protocol
controller and the physical CAN bus-lines.
It is optimized for low-speed data transmission (up to 125 kBaud) in automotive and
industrial applications.
While no data is transferred, the power consumption can be minimized by multiple low
power modes.
In normal operation mode a differential signal is transmitted/received. When bus wiring
failures are detected the device automatically switches in a dedicated single-wire mode
to maintain communication.
Data Sheet Version 1.4 1 2003-07-22
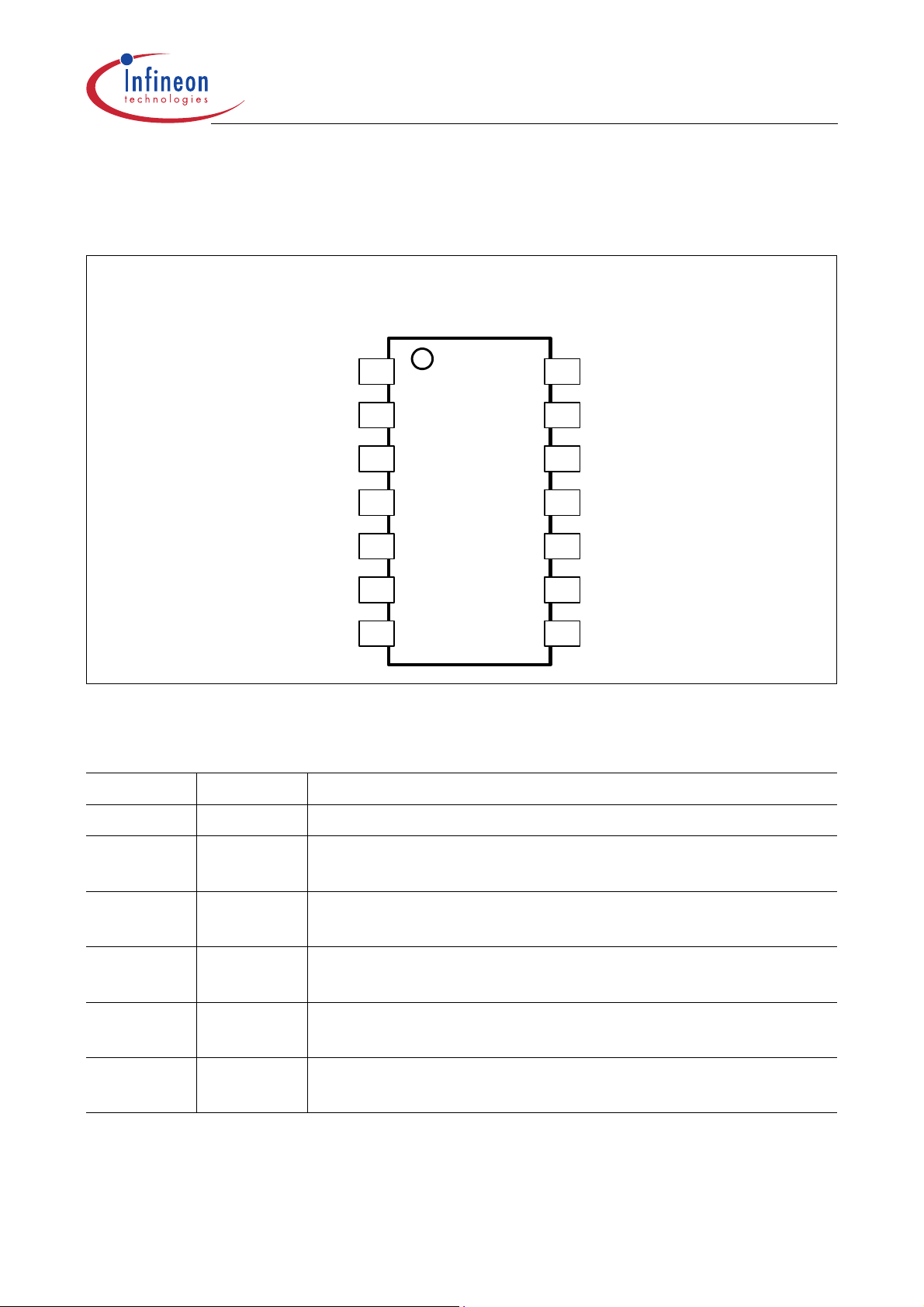
3 Pin Configuration
(top view)
Final Data TLE 6254-2G
Pin Configuration (top view)
P-DSO-14-13
INH
TxD
NERR
NSTB
ENT RTL
WK
1
2
3
4
5
6
7
Figure 1
Table 1 Pin Definitions and Functions
Pin No. Symbol Function
14
13
12
11
10
9
8
V
S
GND
CANLRxD
CANH
V
CC
RTH
1INHInhibit output; for controlling an external voltage regulator
2TxDTransmit data input; integrated pull up, LOW: bus becomes
dominant, HIGH: bus becomes recessive
3RxDReceive data output; integrated pull up, LOW: bus is
dominant, HIGH: bus is recessive
4NERRError flag output; integrated pull up, LOW: bus error (in
normal operation mode), further functions see Table 2
5NSTBNot stand-by input; digital control inputs to select operation
modes, see Figure 4
6ENTEnable transfer input; digital control input to select
operation modes, see Figure 4
Data Sheet Version 1.4 2 2003-07-22
Table 1 Pin Definitions and Functions (cont’d)
Pin No. Symbol Function
Final Data TLE 6254-2G
Pin Configuration (top view)
7WKWake-Up input; if level of V
changes the device
WAKE
indicates a wake-up from low power mode by switching the
RxD and INT outputs LOW and switching the INH output
HIGH (in sleep mode), see Table 2
8RTHTermination resistor output; connect to CANH bus-line via
termination resistor (500 Ω <
R
< 16 kΩ), controlled by
RTH
internal failure management
9RTLTermination resistor output; connect to CANL bus-line via
termination resistor (500 Ω <
R
< 16 kΩ), controlled by
RTL
internal failure and mode management
10
V
CC
Supply voltage input; + 5 V, block to GND directly at the IC
with ceramic capacitor
11 CANH CAN bus line H; HIGH: dominant state
12 CANL CAN bus line L; LOW: dominant state
13 GND Ground
14
V
S
Battery voltage supply input; block to GND directly at the
IC with ceramic capacitor
Data Sheet Version 1.4 3 2003-07-22
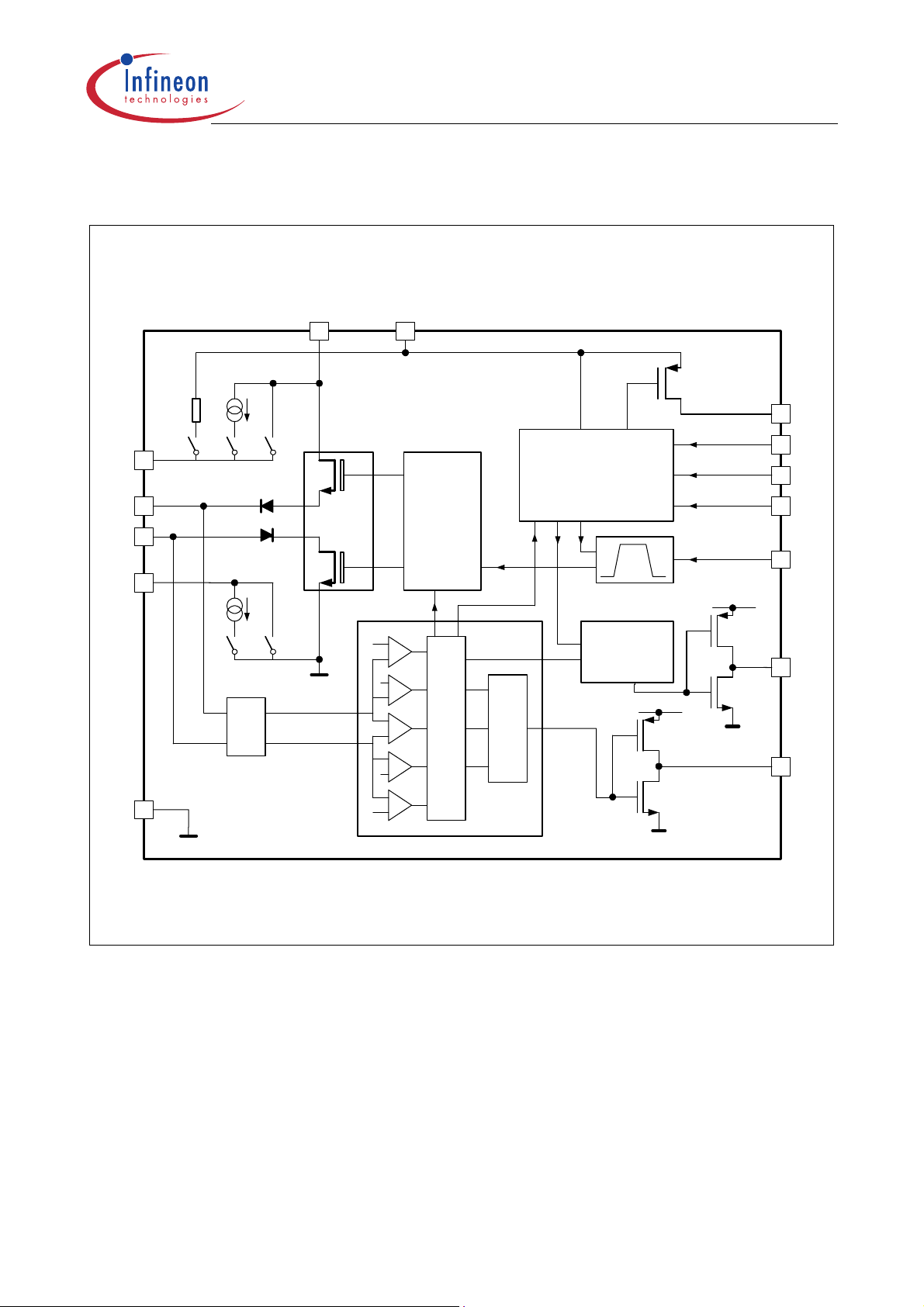
4 Functional Block Diagram
Final Data TLE 6254-2G
Functional Block Diagram
RTL
CANH
CANL
RTH
GND
Vcc
10 14
9
11
12
8
Output
Stage
Vs
Driver
Temp.-
Protection
Mode Control
(normal, stand-by, sleep)
Time Out
Vcc
1
INH
7
WK
6
ENT
5
NSTB
2
TxD
V
CC
Bus Failure
Filter
7.2
1.8
-2.8
3.2
Multiplexer
Wake-Up
Vbat Fail Flag
V
4
NERR
CC
Vcc
3
RxD
Failure Management
13
7.2
Receiver
Figure 2 Block Diagram
Data Sheet Version 1.4 4 2003-07-22
Final Data TLE 6254-2G
Circuit Description
5 Circuit Description
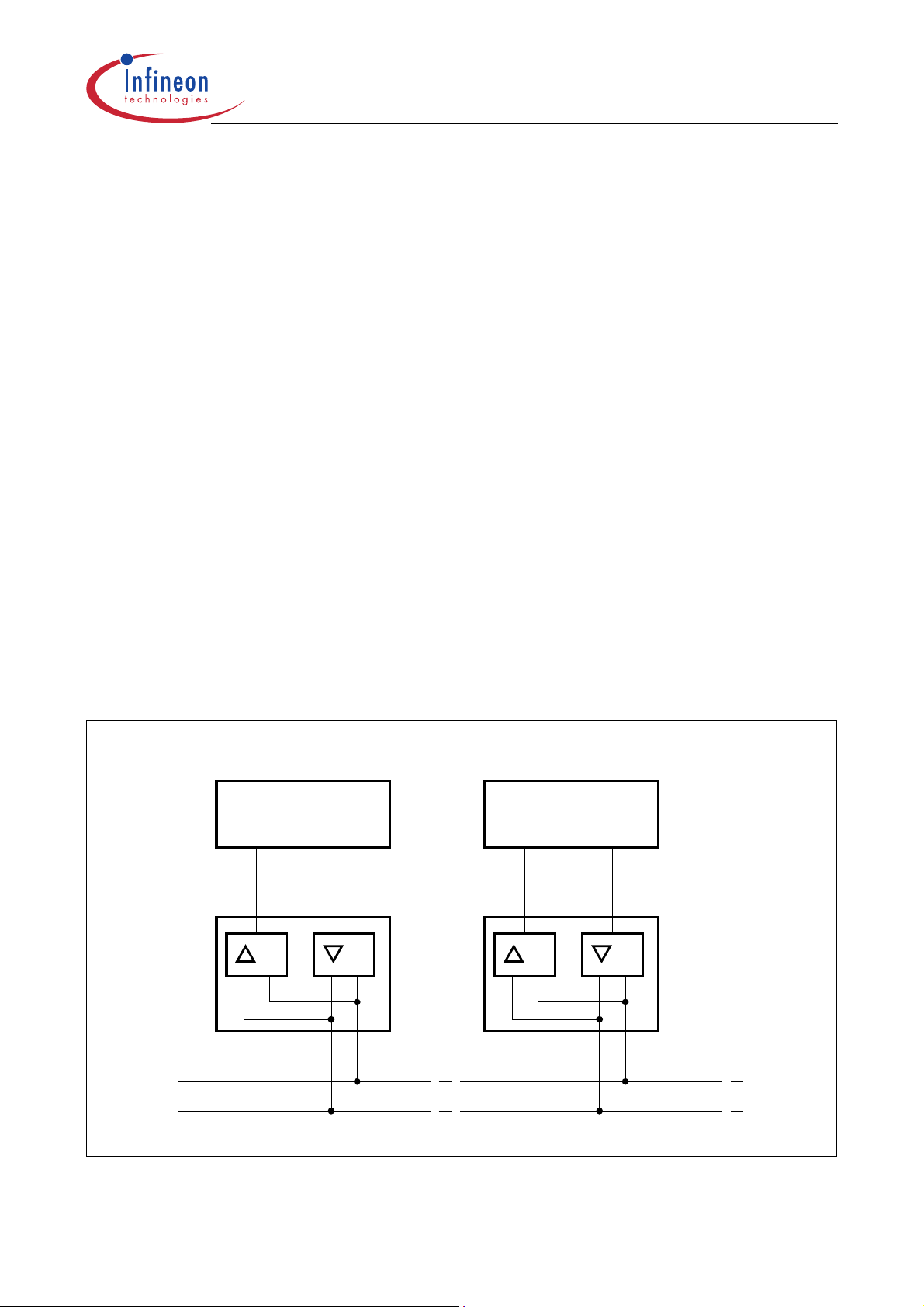
The CAN transceiver TLE 6254-2G works as the interface between the CAN protocol
controller and the physical CAN bus-lines. Figure 3 shows the principle configuration of
a CAN network.
The TLE 6254-2G is optimized for low-speed data transmission (up to 125 kBaud) in
automotive and industrial applications.
In normal operation mode a differential signal is transmitted/received. When bus wiring
failures are detected the device automatically switches in a dedicated single-wire mode
to maintain communication.
While no data is transferred, the power consumption can be minimized by multiple low
power operation modes. Further a receive-only mode is implemented.
To reduce radiated electromagnetic emission (EME) the dynamic slopes of the CANL
and CANH signals are both limited and symmetric. This allows the use of an u nshielded
twisted or parallel pair of wires for the bus. During single-wire transmission (one of the
bus lines is affected by a bus line failure) the EME performance of the system is
degraded from the differential mode.
In case the transmission data input TxD is permanently dominant, both, the CANH and
CANL transmitting stage are disabled after a certain delay time. This is necessary to
prevent the bus from being blocked by a defective protocol unit or short to GND at the
TxD input.
Local Area 1
Controller 1
RxD
1
Transceiver 1
TxD
1
RxD
Transceiver 2
Local Area 2
Controller 2
2
TxD
2
Bus Line
AES02410
Figure 3 CAN Network Example
Data Sheet Version 1.4 5 2003-07-22
Final Data TLE 6254-2G
Circuit Description
NSTB 0
Power Down
Normal Mode
NSTB
11
ENT 0 ENT 1
INHENT
high
RxD-Only
NSTB
10
NSTB
ENT
INHENT
high
0
1
ENT 1
ENT
t < t
h(min)
NSTB
V
CC
NSTB
NSTB
ENT
0
Start Up
Power Up
1
1
0 or
low
1
NSTB
ENT
or
V
CC
V
Stand-By
bat
NSTB
00
0
0
low
INHENT
high
Wake-Up via
CAN-bus
or
WK-Input;
t > t
WU(min)
or
t > t
WK(min)
Sleep Mode
NSTB
01
Go to
INHENT
float.
ENT = 1
t > t
h(min)
Sleep Mode
NSTB
00
INHENT
float.
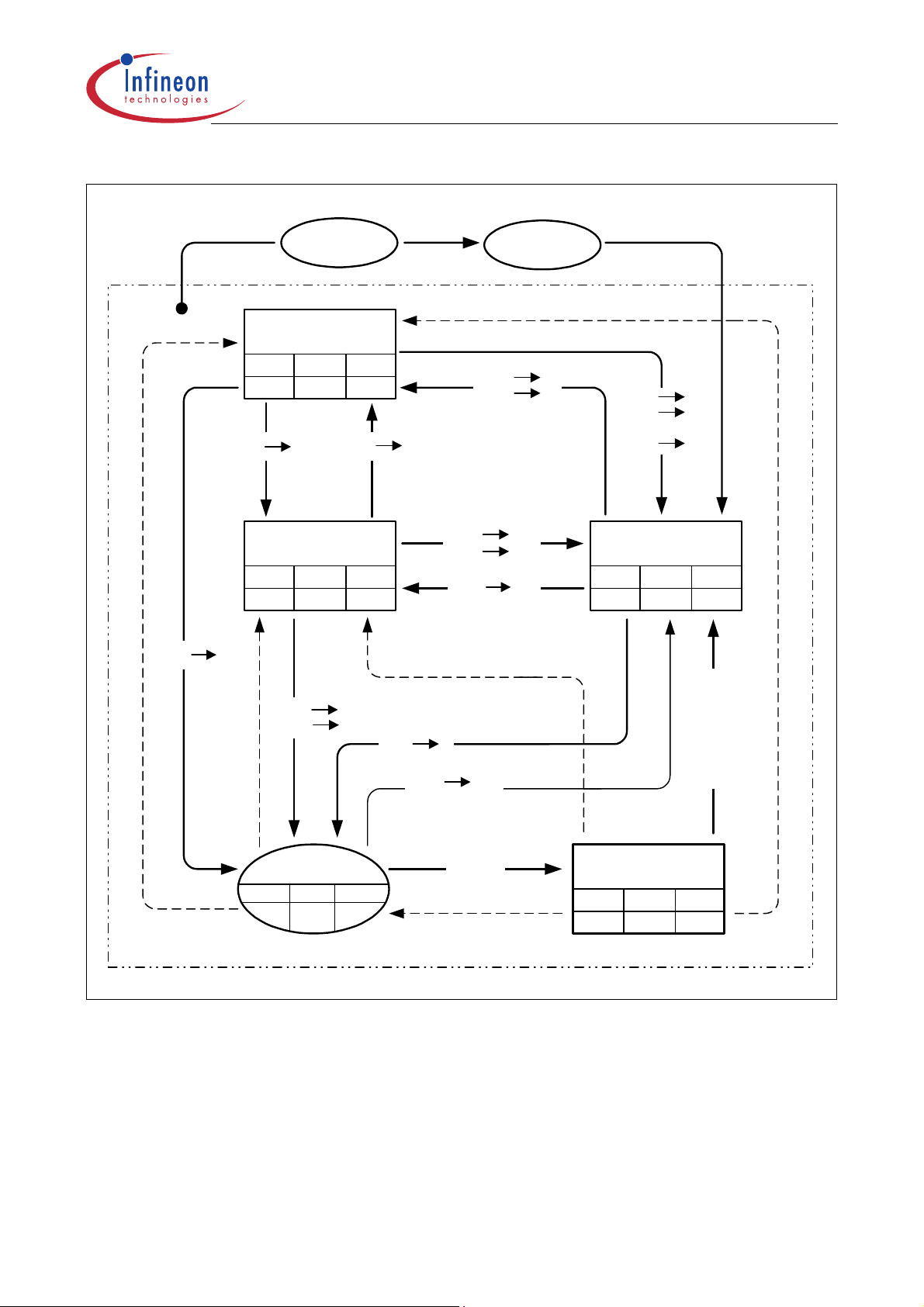
Figure 4 State Diagram
Data Sheet Version 1.4 6 2003-07-22

Final Data TLE 6254-2G
Circuit Description
5.1 Operation Modes, Wake-Up
In addition to the normal operation mode, the TLE 6254-2G offers a receive-only mode
as well as two low power operation modes to save power during periods that do not
V
require communication on the CAN bus: sleep mode,
and Figure 4). Via the control input pins NSTB and ENT the operation modes are
selected by the microcontroller. In the low power modes neither receiving nor
transmitting of messages is possible.
In sleep operation mode the lowest power consumption is achieved. In order to minimize
the overall current consumption of the ECU (electronic control unit) the external voltage
regulator (5 V supply) is deactivated by the INH output in this mode, when connected.
For that purpose the INH output is switched to high impedance. In parallel the CANL line
is pulled-up to the battery supply voltage via the RTL output and the pull-up paths at the
input pins TxD and RxD are disabled from the internal supply.
To enter the sleep operation mode the transition mode “Go-to-Sleep” has to be selected
(Figure 4) for a minimum time
t
. After the minimum hold time t
h(min)
can be actively selected. Otherwise the TLE 6254-2G will automatically fall in sleep
mode because of the not powered microcontroller.
stand-by mode (see Table 2
Bat
the sleep mode
h(min)
On a wake-up request either by bus line activities or via the WAKE input, the transceiver
is automatically set in
V
-stand-by mode. Now the voltage regulator (5 V supply) is
Bat
enabled by the INH output. The WAKE input reacts to both, transition from high to low
voltage level as well as the other way round. To avoid faulty wake-ups due to transients
on the bus lines or the WAKE input circuitry respectively, a certain filter time is
implemented. As soon as
V
is provided, the wake-up request is monitored on both, the
CC
NERR and RxD outputs, by setting them low. Upon this the microcontroller can activate
the normal operation mode by setting the control inputs NSTB and ENT high.
The V
stand-by mode corresponds to the sleep mode, but a voltage regulator
Bat
connected to the INH output will remain active. Wake-up requests via the WAKE pin or
the bus lines are immediately reported to the microcontroller by setting RxD and NERR
low. A power-on condition (
to
V
stand-by mode.
Bat
V
pin is supplied) automatically switches the TLE 6254-2G
BAT
In the receive-only mode data on the CAN-bus are transvered to the RxD output, but both
output stages, CANH as well as CANL are disabled. This means that data at the TxD
input are not transmitted to the CAN bus. This mode is useful in combination to a
dedicated network-management software that allows separate diagnosis for all nodes.
A wake-up request in the receive-only mode is only reported at the RxD-output. The
NERR output in this mode is used to indica te a battery fail condition. When entering the
normal mode the
V
-flag is reset and the NERR output becomes high again. This
bat
feature is useful e.g. when changing the ECU and therefore a presetting routine of the
microcontroller has to be started.
Data Sheet Version 1.4 7 2003-07-22
Final Data TLE 6254-2G
Circuit Description
If either of the supply voltages drops below the specified limits, the transceiver is
automatically switched to
.
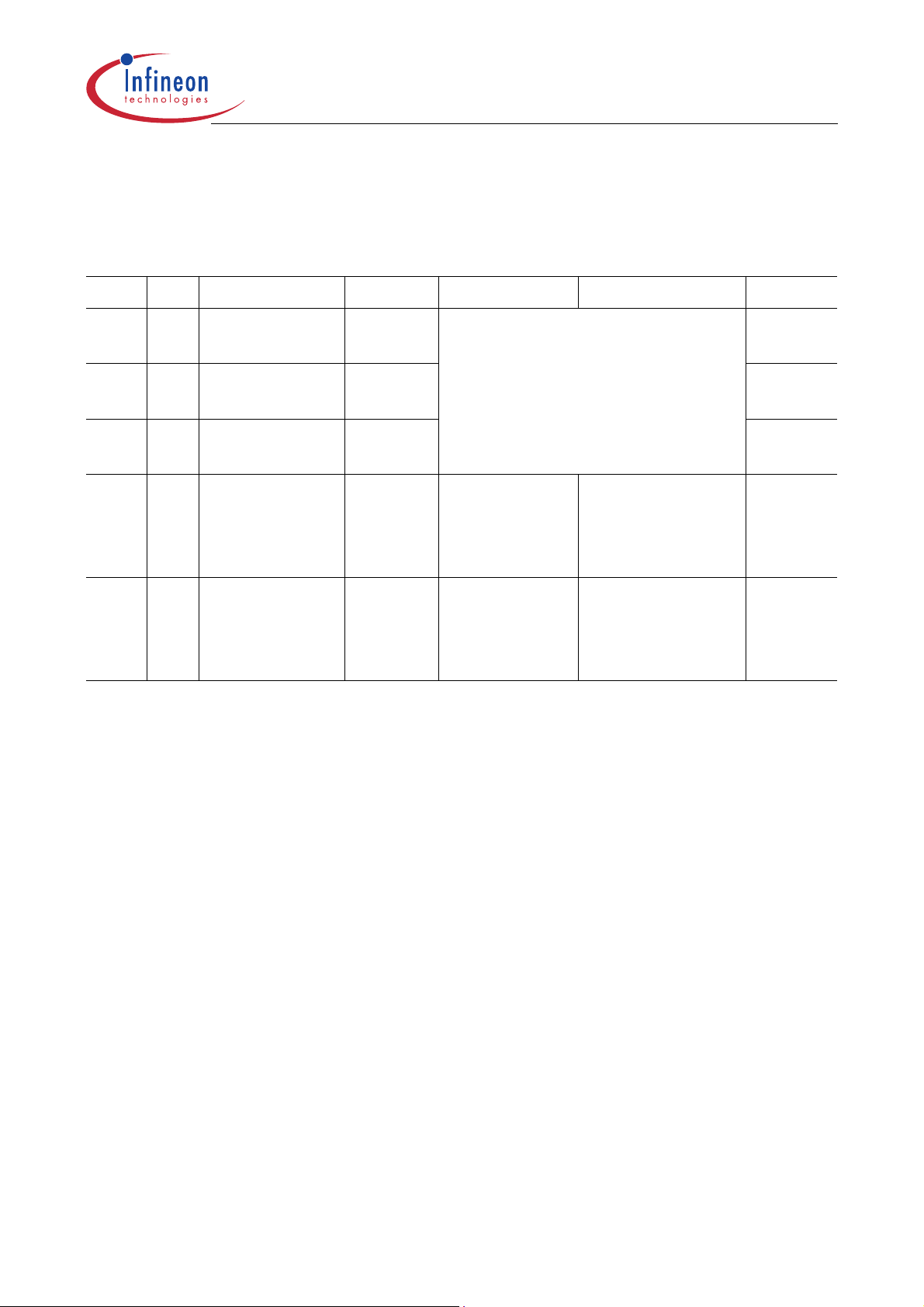
Table 2 Truth Table of the CAN Transceiver
NSTB ENT Mode INH NERR RxD RTL
V
stand-by mode or power down mode respectively.
Bat
00
0 0 sleep mode
0 1 go to sleep
1 0 Receive-only
V
stand-by
BAT
mode
1)
command
mode
V
bat
2)
floating switched
active LOW wake-up interrupt if
V
is present
CC
becomes
floating
V
bat
active LOW
V
power-on
BAT
3)
flag
HIGH = recessive
receive data;
LOW = dominant
switched
to V
to
V
switched
to
V
switched
to
V
receive data
1 1 normal mode V
bat
active LOW
bus error flag
HIGH = recessive
receive data;
switched
V
to
LOW = dominant
receive data
1)
Wake-up interrupts are released when entering normal operation mode.
2)
If go to sleep command was used before, ENT may turn LOW a s VCC drops, without affecting internal functions.
3)
V
power-on flag will be reseted when entering normal operation mode.
BAT
BAT
BAT
BAT
CC
CC
5.2 Bus Failure Management
The TLE 6254-2G detects the bus failures as described in Table 3, and automatically
switches to a dedicated CANH or CANL single wire mode to maintain data transmission
if necessary. Therefore, the device is equipped with one differential receiver and 4 single
ended receivers, two for each bus line. To avoid false triggering by external RF
influences the single wire modes are only activated after a certain delay time. As soon
as the bus failure disappears the transceiver switches back to differential mode after
another time delay. Bus failures are indicated in the normal operation mode by setting
the NERR output low.
The differential receiver threshold is typ. – 2.8 V. This ensures correct reception in the
normal operation mode as well as in the failure cases 1, 2 and 4 with a noise margin as
high as possible. For these failures, further failure management is not necessary.
Detection of the failure cases 1, 2, 3a and 4 is only possible when the bus is dominant.
Nevertheless, they are reported on the NERR output until transmission of the next CAN
word on the bus begins.
Data Sheet Version 1.4 8 2003-07-22
 Loading...
Loading...