

Page 1
250 Pro Instruction manual
International edition
Rev 1.0 - April 2016
‘Living Manual’
Page 2
2
Table of Contents
Table of Contents
Living Manual
Thank You!
Getting Started, ARF Version
The Anatomy of a Vortex
Connectors and Switches
Connector Part Numbers and Sources
Arm Assembly
Camera Mounting Plate
Flight Camera
GoPro Camera Mount
Lost Model Alarm
The On Screen Display (OSD)
The Welcome Screen
The Main Menu
The LED Setup Menu
The Flight Controller Menus
The Video Tx Menu
Flight Controller
R/C Transmitter Control Modes
Flight Modes
Betaflight / Cleanflight / Baseflight / Multiwii / Open-Source
Cleanflight Configurator Connection
Page 3
3
Flight Controller Stick Commands
Overview
RotorSENSE
Pro-Tuning
R/C (Uplink) Receiver Selection
CPPM
SBus, or Spektrum
Notes on Receiver Selection
Receiver Auto-Detection
Version 1: OSD Firmware prior to ???.???
Spektrum™ Radios
FrSky Taranis Radio
Futaba S-Bus Radios
Version 2: OSD Firmware from ???.??? onwards
Gaming (Beta)
The Birth of a Gaming Mode - The History
How Does It Work?
Enabling Gaming Mode
Race Guidelines - Flying with Friends
Diagnostics - Motor Test
BlackBox - Logging and Tuning
Firmware Upgrades
OSD Firmware Upgrades
Upgrade procedure
Upgrade procedure for bricked OSD
Flight Controller Firmware Upgrades
Page 4
4
Appendix A: EzUHF Configuration
Appendix B: The Wizard - What else does it setup?
Appendix C: Video Tx - Staying Legal
ITU Region 2: Americas, Greenland, eastern Pacific Islands
ITU Region 1: Europe, Africa, Middle East, Iraq, Soviet Union
ITU Region 1: Europe, Africa, Middle East, Iraq, Soviet Union
Appendix D: LED Board - Status report
Looking after your Vortex
Snow and Water
The Sun
Dirt
Jealous Friends
Specifications
Spare parts and Upgrades
Support
Frequently Asked Questions
Q. I have taken my 250 Pro apart, and this ‘Spring Thing’ popped out, where does it
go?
Q. How do I calibrate my 250 Pro ESCs?
Q. Can I fly in the rain?
Q. I dunked my 250 Pro in the ocean/lake/pond, what do I do?
Q. Do I really need to de-solder wires to install a pimp kit?
Q. What is the deal with the new LED board?
Q. My motors are ‘stuttering’, and the quad falls out of the sky under full throttle
Q. My R/C Receiver isn’t auto-detected by the wizard
Q. I don’t like the stock camera, and would like to upgrade it
Q. The bell on one of my motors worked loose
Page 5
5
Q. My vortex beeps continuously
Q. My vortex is playing Crazy Train song
Q. My vortex emits 2 long beeps followed by a short beep on startup (--·)
Q. When I fly, all I see is the ground
Q. My Vortex flips instead of taking off
Q. I updated to the latest BetaFlight x.y.z and my quad is no longer tuned
Regulatory notice
Directions on safety
Warranty
Social Networks
Like Us
Page 6
6
Living Manual
Note that this manual is a ‘living manual’.
Instead of downloading a static PDF file, the manual is an online document which reflects
edits, additions, and corrections as they happen.
The Living Manual also allows readers to add their comments, which editors can use to refine
the documentation.
Confused by part of the manual? Wishing for a better explanation for part of the setup? Leave
a note and the editors will listen.
Thank You!
The team that designed the Vortex would like to thank you for purchasing this product.
Many hours of development, and testing time went into the Vortex 250 Pro, we truly hope that
this is reflected in your experience with the product.
The Vortex 285 was a tough lead to follow, but we believe that the Vortex 250 Pro raises the
bar in just about every axis, which hopefully will enable even more pilots to enter the exciting
world of FPV racing.
We would love to hear your feedback on the product, whether good or bad, at
feedback@immersionrc.com.
Page 7
7
WARNING
Congratulations on your purchase of one of the hobby’s first ARF pure-bred racing
quadcopters. A product designed by FPV Racers, for FPV Racers.
Do not expect it to fly like a DJI Phantom™ . It does not have a return-to-home feature, no
GPS, and it does not have stabilization features that will allow your girlfriend to fly it.
Take it easy if you are new to the world of FPV racing, try to avoid slamming the quad into the
first wall before you have mastered slaloming through the trees on the way to the wall.
Acro mode is something that should be learned as soon as possible, flying any other mode is
a bit like driving a Lamborghini around a parking-lot in reverse… not exactly what you bought
the Lambo for.
Please carefully read the recommendations in this getting started guide, as far as
equipment/battery selection, and how to run the Vortex 250 Pro Wizard.
REMOVE PROPS
Mini-quad props can do some serious damage when coming in contact with human skin.
Unless you are ready to fly, when you are working on a quad with the battery connected, it is
highly recommended to REMOVE ALL PROPS.
When setting up mini-quads, there is always a remote chance that a configuration change can
spin up motors unexpectedly.
ImmersionRC accepts no responsibility, or liability, for any injury, or damage, to persons or
property, caused by the use of the Vortex.
INSTALL ANTENNA
The Video Transmitter included in the Vortex may be damaged permanently if run without the
supplied SpiroNET Antenna.
Please take care to install this antenna before every flight, and when powering up the Vortex
for even a short time period.
ImmersionRC accepts no responsibility for damage caused to the Vortex by operating without a
suitable Tx antenna installed.
Page 8

8
Getting Started, ARF Version
The separate Getting Started guide should be used when setting up your Vortex 250 Pro for
the first time. It includes sections on choosing an appropriate battery, and R/C receiver, and
also the operation of the setup wizard.
Page 9
9
The Anatomy of a Vortex
Connectors and Switches
1) USB connector, used to configure the flight controller and upgrade the Vortex
firmware.
Note that to use the USB connector, a battery must be connected also. The Vortex
cannot be powered through the USB connector.
Please be careful not to put too much strain on this connector. It is a lightweight
surface-mount part, and if the quad is dragged around by the USB cord it may not
survive.
2) LED board button, used to change Video Tx band, to restart the wizard and also to put
a spektrum receiver in bind mode.
Press and release after 1st beep to change video band, release after 2nd beep to
restart the wizard, release after 3rd beep to put a spektrum rx in bind mode, finally
release after 4th beep to cancel operation.
Page 10
Note that the module is restrained using a stainless-steel spring. Take care when
removing the two mounting screws on the top plate, since the spring may be
10
Note: To bind a Spektrum Rx using the rear button, the vortex must be placed in
SPEKTRUM 1024/2048 mode, and not AUTO mode, using the Vortex Configurator on a
PC or Mac.
3) Fusion FC/OSD button, used to enter firmware update mode in the case of a ‘bricked’
OSD. Note that this button is not required in normal use with the bootloader and
firmware shipped with the 250 Pro. .
See the Firmware Upgrades chapter for more details.
4) Socketed Video Tx Module
Either a 350mW, or 25mW 5.8GHz Custom NexWaveRF module, depending upon the
target market. Note that 25mW is the maximum power level allowed for license-free
use in the EU.
Page 11
ejected from the side of the quad, into awaiting fingers…
Be sure to reinstall the spring when re-assembling the Vortex, to avoid the Tx
module from damage in a crash.
11
5) Flight Camera Video/Power Connector
The flight camera video and power connector is a 3-pin Picoblade connector located
behind the flight camera. The connector can be easily accessed without the need to
disassemble the quad.
Looking from the front of the quad, the pinout is as follows, left to right:
1. Video
2. Gnd
3. +5v
6) GoPro Power Connector
The GoPro power connector is a 2 pin Picoblade, also accessible through the left side
plate. It is typically used to power a GoPro with its battery removed, to remove weight
from the front of the quad, and therefore make getting the COG correct easier.
Page 12
NOTE: Certain GoPro models will not power up without a battery installed, a little
research may be required to identify which ones .
12
The connector has the following pinout, starting from the front of the quad:
1. +5V ~1A Maximum Current
2. Gnd
7) Receiver PPM Connector (CPPM Only)
When using a classic PPM (a.k.a. CPPM) receiver, use the PPM connector, a 3-pin
JST-PH connector with the following pinout, looking from right to left in the below
image:
1. Gnd
2. +5V Power to the receiver
3. PPM 3.3v, or 5v logic levels
Page 13
13
8) Receiver Serial Connector
When using receivers which emit a serial protocol (most of the receivers used in Drone
Racing today), an alternative connector, located on the top of the Fusion Gen2 PCB is
used.
This connector contains both a +5V, and a +3.3V supply, to support most of the
receivers on the market today.
For longer-range flight, the latest EzUHF firmware allows the 4 channel Lite receiver to
be connected using the S-Bus protocol. Alternatively the TBS Crossfire receiver can
also be used via S-Bus.
Page 14
Note: Pay EXTREME attention to the polarity of batteries connected to this
connector, especially those soldered ‘DIY’. A reverse-polarity connection, even for
a fraction of a second will let out the ‘magic smoke’ and destroy most of the
electronics in the Vortex.
Also Note: When unplugging the battery, especially one with a new, and rather tight
connector, take care to hold the cables, and avoid unnecessary strain on the Vortex
PDB. Pulling these cables too hard may pull the traces off of the PCB.
Cable
Description
Manufacturer’s PN
Digikey PN
ESC Signal Connector
Picoblade 2 pin
0510210200
WM1720-ND
FUN/GPS Signal Connector
Picoblade 5 pin
0510210500
WM1723-ND
Camera Signal Connector
Picoblade 3 pin
0510210300
WM1721-ND
Picoblade Signal Wires
(all Picoblade connectors)
Picoblade
0006660013
WM2320-ND
14
9) XT-60 Battery Connector
The pre-installed XT-60 connector is compatible with most batteries of the size and
capacity in the class required by the Vortex.
Connector Part Numbers and Sources
If any of the connectors on the Vortex 250 Pro are damaged, or if 3rd party components are to
be integrated into the system, the following list of connectors and pre-crimped wires should
be useful.
Page 15
Note: The choice of soldered connections here, instead of the much more convenient
connector option may not seem ideal.
Various connectors were tried, but one compact enough, robust enough, and capable of
carrying > 20 Amps per motor was not found.
A custom connector suitable for this application will be included in a future revision of the
Vortex to simplify the in-field replacement of arms.
15
Arm Assembly
When changing the arm, a soldering iron is required, to remove the ESC + and - battery cables.
Page 16

NOTE :It is important that all four of these pins are installed before every flight. Flying with
fewer pins installed may result in damage in a crash.
NOTE :A good upgrade for the 700TVL CMOS is the HS1177 CCD, available from various
online retailers. This camera will fit in the standard camera mounting bracket.
16
Camera Mounting Plate
Flight Camera
The Vortex flight camera is suspended from a dampened carbon fiber plate. This reduces the
amount of Jello due to unbalanced (or slightly damaged) props.
The camera mount itself allows a
tilt of up to ~45 degrees,
compensating for frame tilt due to
high speed racing.
NOTE: The camera pivot point is
intentionally tiltable without tools.
Because of this, it may move after
the occasional ‘hard landing’, and
should be checked before the next
launch.
The Vortex frame was designed for the family of FatShark cameras with lightweight plastic
cases, from the 600, and 700 TVL CMOS cameras, through to the 900 line CCD.
The Vortex is shipped with the 600 line CMOS installed (certain quads may be shipped with
the slightly improved 700 line version).
The plastic pins and circlips installed into each of the dampers are important, and prevent the
camera mounting plate from being separated from the frame in a crash.
Page 17
NOTE: The alarm is driven directly from the OSD on the 250 Pro, and not from the Flight
Controller, so changing beeper settings in the Cleanflight configurator will not change its
behavior.
17
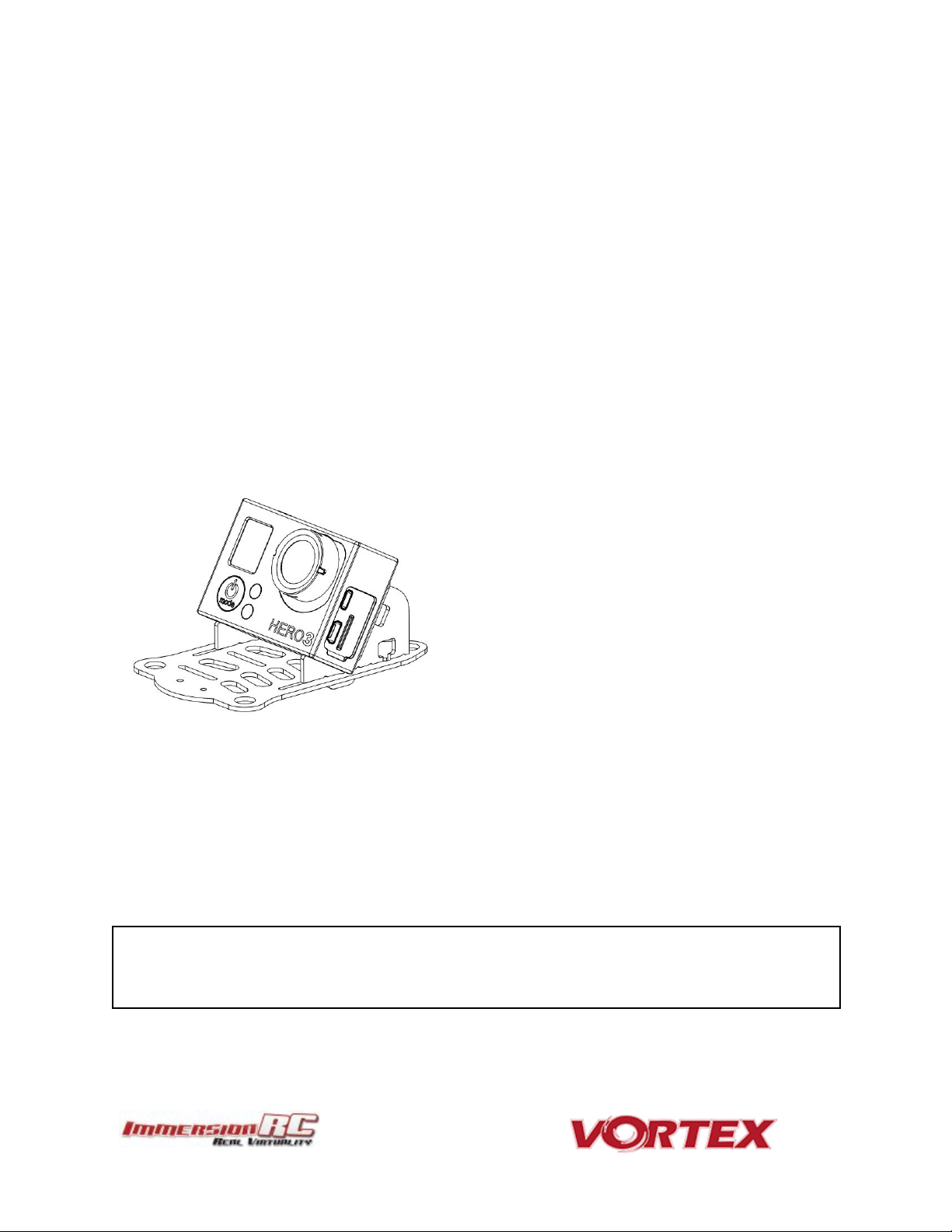
GoPro Camera Mount
The Vortex 250 Pro ships with a GoPro camera ‘recliner’ kit, which may be optionally installed.
This kit tilts the GoPro camera to an angle appropriate for high speed flight, while providing
mounting points to securely fasten the camera to the quad.
To install the recliner kit, the anti-vibe camera mounting plate must be removed following
these simple steps:
1) Remove both side-plates from the quad.
2) Carefully remove the 4 clips which restrain the pins which run through the rubber
dampers.
3) Remove the plate, mount the GoPro recliner, and attach with the supplied aluminium
screws from the bottom of the plate.
4) Re-install the anti-vibe plate, the pins, and the clips that restrain them.
Lost Model Alarm
The Lost Model Alarm on the Vortex 250 Pro sounds when the quad is disarmed after landing,
or if a receiver failsafe occurs.
The alarm is designed to be as simple as possible, without controls which could allow it to be
accidentally disabled, resulting in a lost quad.
Page 18

18
Page 19
19
The On Screen Display (OSD)
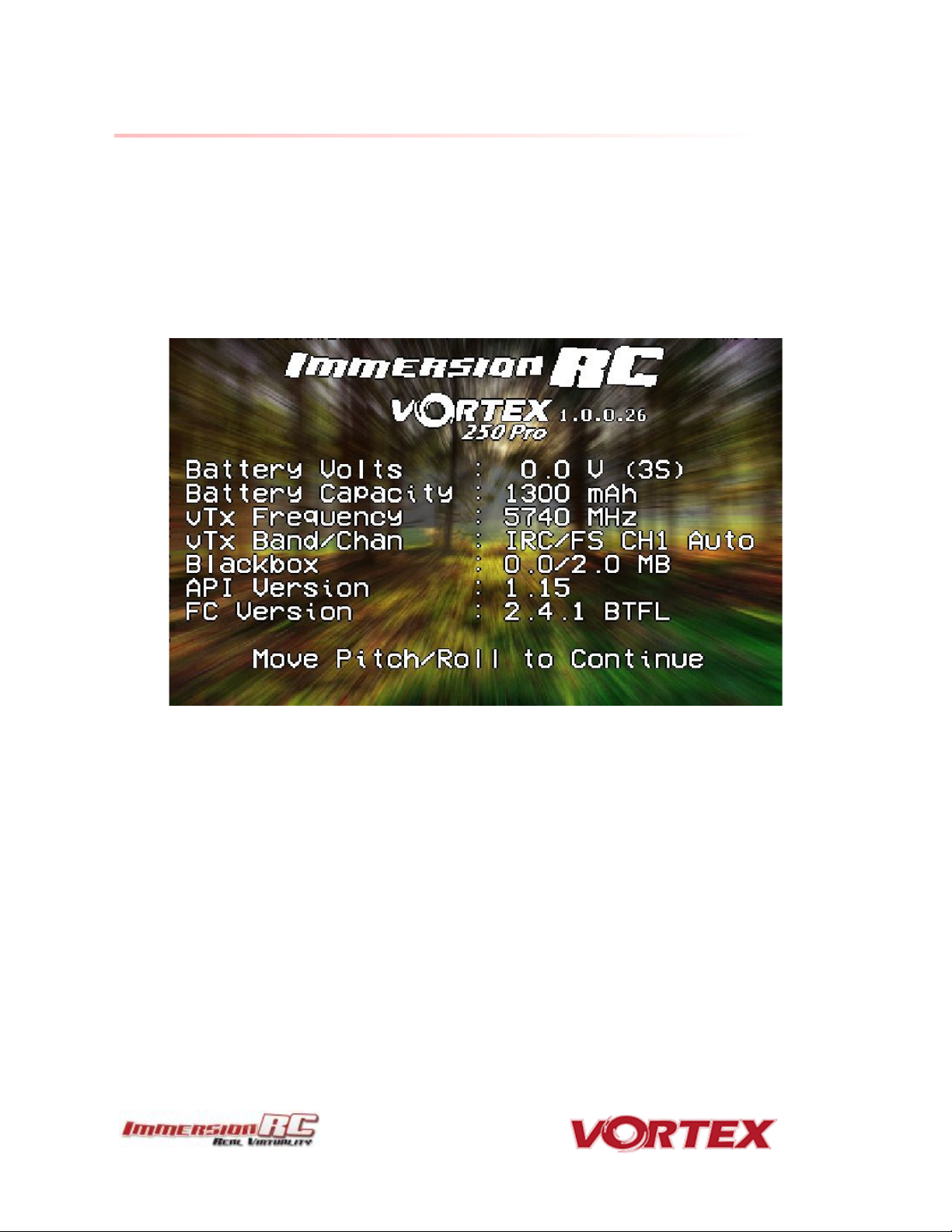
The Welcome Screen
Each time the Vortex is powered up, and before sticks are moved, the following welcome
screen is displayed.
This shows various pieces of status information, including the Flight Controller version
number, and Flight Controller API version which is fairly important for OSD compatibility.
Moving the pitch/roll stick (right stick for mode 2’ers) will dismiss the menu.
Page 20
20
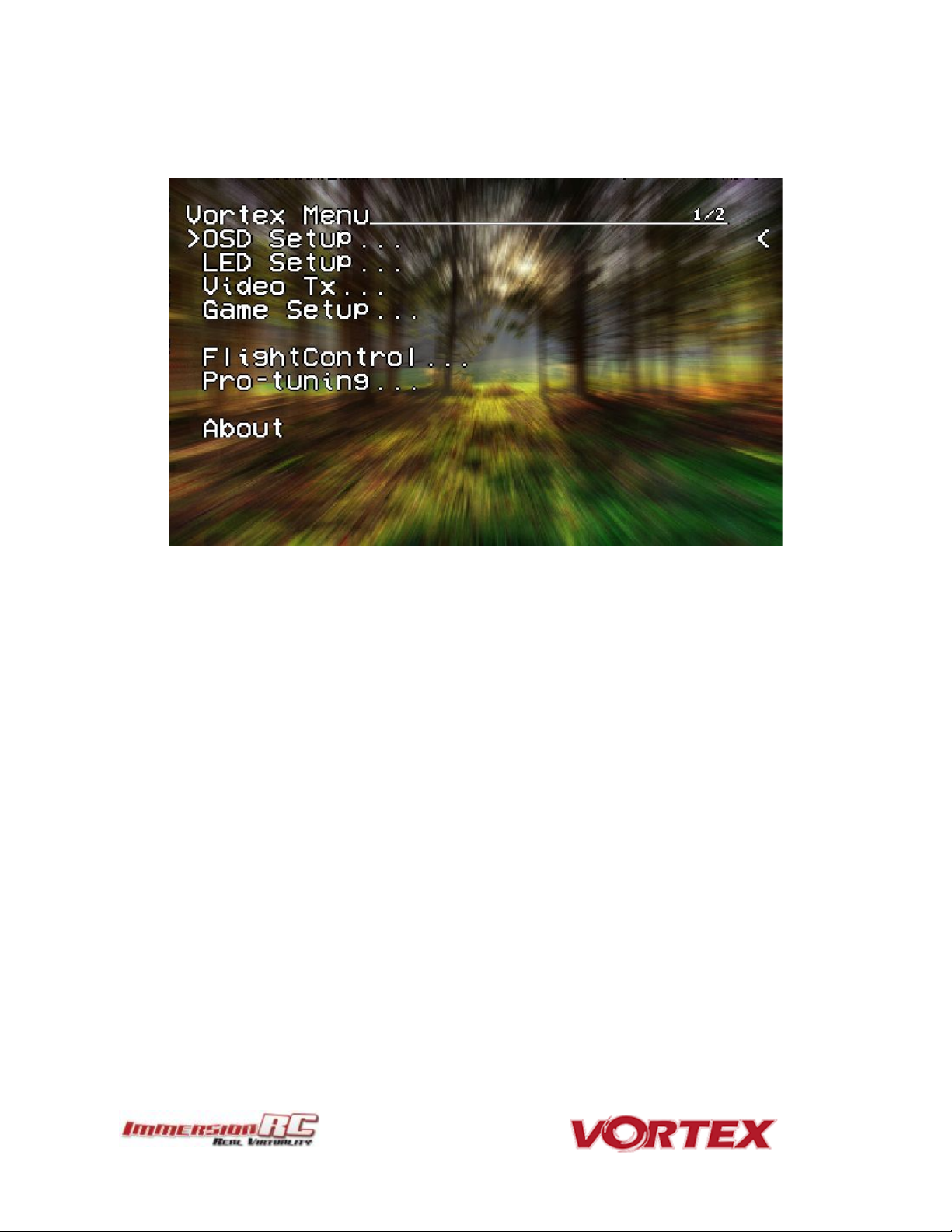
The Main Menu
For Mode 2’ers, holding the throttle stick down and to the left will enter the main menu. Note
that this stick position needs to be held for a few seconds before the menu appears.
To navigate the menu, use the pitch/roll stick.
Page 21

NOTE: It is highly recommended to set this to match the flight pack that you are using to
allow the OSD to warn you when the battery is reaching critical levels.
21
The OSD Setup Menu
Various OSD setup parameters are available in this menu.
The Landscape, defines the elements that are shown on the main screen in flight, including an
EzOSD-type landscape (the default), a clutter-free landscape for hardcore racers, and a
gaming mode which is currently in Beta form (documented later in this manual).
The Pseudo lets you name your quad. This is useful when several Vortexes are being used in
a race, and simplifies Video Tx channel assignments.
The Pack Capacity should be set to the capacity of your flight battery. The OSD will track
battery consumption, and will warn, with screen-center alarms, if it gets critical.
Page 22

22
Alarms may be enabled and disabled in the Alarms Setup menu.
It is highly recommended to start flying with all alarms enabled, and disable them if required
after getting used to the quad.
Page 23

23
The LED Setup Menu
The RGB LEDs on the rear of the Vortex are fully programmable, with colors, and various
patterns.
For Parameter Mode = Intensity, the intensity of the LEDs will reflect the current throttle
position.
For Parameter Mode = Frequency the blink rate of the LEDs will reflect the current throttle
position.
For Parameter Mode = Gradient, the LEDs will shift from the foreground color, to the
background color, based upon the current throttle position.
Other modes will be supported in future firmware updates.
Page 24

24
The Flight Controller Menus
In-field tweaking of flight-controller menus is possible without a laptop and USB cable.
All of the critical parameters, PIDs, Expos, Loop time, etc. are available.
Note that the PID Setup menu is a two page menu, keep moving the caret down to access the
second page.
Page 25

25
Page 26

26
Note that all of the Flight Controller parameters can be preset by loading one of the installed
Pro-Tunes.
Page 27

NOTE: Certain 250 Pros, at the request of ImmersionRC resellers, are locked to bands
legal for use in their distribution region.
27
The Video Tx Menu
The Video Tx menu shows, graphically, the 5.8GHz frequency band, from low (left) through
high (right) frequency.
5 bands are supported, covering the standard ImmersionRC/FatShark frequency bands, plus
all of the ‘Boscam’, Team Black Sheep bands, and also the new ImmersionRC ‘RaceBand’.
Note the need for RaceBand in this hobby is immediately obvious after looking at this graph!
NOTE: Channel 8 of the IRC/FS set cannot be received by 7 channel ImmersionRC or FatShark
receivers. Unlocked Uno/Duo5800 receivers can receive it, as can the new FatShark 4-band
RaceBand Dominator module.
WARNING: Please play attention to the legality of the channels that you are using in your area.
While the authorities have been relatively tolerant of emitted power on 5.8GHz, out of band
transmission is a more serious issue.
In the USA, with a Ham license (required to emit more than about 1mW), operation within the
5650MHz to 5925MHz band is allowed. All 8 RaceBand channels fall within this band, but the
outer channels of the Boscam E/DJI band are outside the band.
Within Europe, the Ham band is 5650MHz to 5850MHz, which allows the first 6 RaceBand
channels.
Page 28

Pitch
Throttle Yaw
Roll
Throttle
Pitch
Yaw
Roll
Pitch
Throttle
Roll
Yaw
Throttle
Pitch
Roll
Yaw
28
Flight Controller
R/C Transmitter Control Modes
Mode 1 - Common in Europe
Mode 2 - Common in the USA
Mode 3
Mode 4
Page 29

Acro
This mode is the preferred mode for the more advanced mini-quad pilot.
In many ways it is the simplest mode, but also the hardest mode to learn.
In Acro mode, the accelerometer part of the IMU is not used, only the Gyro.
Because of this, the quad will not self-level, explaining the steep learning curve
for this mode.
To learn this mode, it is recommended to start flying the quad FPV, in Angle
mode, get some altitude, and switch into Acro mode.
Landings in Acro mode can be a bit challenging for the beginner, so switching to
Angle mode before landing is a reasonable way to deal with this.
Acro mode is the ideal mode to have fun with flips and rolls.
Angle
Angle mode is the easiest to learn. When the sticks are centered, the flight
controller is always working to level the quad.
The deviation of the Roll/Pitch controls from neutral defines the angle of the
quad in flight.
Not a great mode for racing, but definitely the mode to use for the maiden flight.
Horiz
Horiz mode is a bit of a hybrid mode. It does auto-level, but also allows flips and
rolls.
29
Flight Modes
Three flight modes are configured by the Vortex Wizard, and are mapped by default to
channel 5 of the R/C Tx.
These modes are as follows:
Page 30

NOTE: Do not install new Cleanflight builds, nor builds of other Flight Controller software,
without first verifying that they are supported by the Vortex OSD.
NOTE: When Vortex will detect a new flight-controller version, it will automatically restart
in TX Wizard mode.
30
Betaflight / Cleanflight / Baseflight / Multiwii /
Open‐Source
The development of the Vortex would not have been possible without the effort of a large
team of individuals who invested in the open source flight controller software that running on
the Vortex.
The variant of the open source flight controller firmware that we chose to power the Vortex is
Betaflight, mainly due to it’s solid support of the OneShot ESC control protocol.
Since the OSD firmware needs an intimate knowledge of the flight controller API, care must be
taken when installing updated Betaflight builds (IRCFUSIONF3).
The ImmersionRC team may not have support for Beta, and recently released Cleanflight
builds the day they are released, but we are committed to keep up with changes.
Check the ImmersionRC Vortex product page for compatibility information.
Cleanflight Configurator Connection
To hook up the Cleanflight Configurator, hook up a Personal Computer via a standard
Micro-USB cable, to the connector on the back of the Vortex.
Be aware that making certain changes via the configurator may break compatibility with the
Vortex OSD. One example would be changing the channel order, which is set by the wizard.
Re-running the Vortex setup wizard will reset the Cleanflight configuration to defaults.
Page 31

31
Flight Controller Stick Commands
Enter Menu/Disarm Flight Controller:
Mode 2: Throttle stick left, and down (normal flight controller disarm control)
Mode 1: Yaw left, Throttle stick down
Arm Flight Controller:
Mode 2: Throttle stick right, and down
Mode 1: Yaw right, Throttle stick down
Reset vTx Channel:
Mode 2: Throttle Down, Rudder Left
+ Elevator Up, Aileron Left
Mode 1: Throttle Down, Rudder Left
+ Elevator Up, Aileron Left
Page 32

NOTE: The first generation of EzESCs cannot have their firmware upgraded by end-users.
Upgrading them requires special equipment, used in the factory, and at ImmersionRC
repair centers.
NOTE: This procedure may be performed with props in place, or props removed. For
safety’s sake it is recommended that props are removed.
If they are left installed, it is recommended to use a stick, or other object instead of a
finger to flick the prop.
IMPORTANT: ImmersionRC ESCs DO NOT REQUIRE CALIBRATION. The calibration
process required by most ‘budget’ ESCs is required since a precise quartz oscillator is not
used in the ESC. The ImmersionRC ESCs all include this critical component, and therefore
never need calibration.
32
ESCs - The 20A Vortex 250 ESC
Overview
The ESCs used in the Vortex are a full-custom design, which uses a potent 32-bit ARM
processor.
Their diminutive 9.4mm width allows them to be inserted into the carbon fiber arms of the
Vortex 285, or into the plastic ESC covers of the 250, where they are well protected against
the elements, and from physical damage from passing tree-branches.
The ESCs come pre-configured for all motors supported by the Vortex, and they have also
been used successfully with various aftermarket motors used by our test team.
RotorSENSE
A unique feature of the ESCs used in the Vortex is RotorSense.
This feature puts an end to the decade-old ‘wire-swapping’ technique used to get brushless
motors to spin in the correct direction.
Once props are installed, at power-up before arming the flight controller, a simple spin of a
prop will program the rotation sense.
The full procedure is as follows:
1) Cycle power to the quad to ensure that the flight controller is not armed.
2) Spin the motor in the desired direction. If the ESC recognizes the spin, two short beeps
will be generated.
3) Spin the motor again in the desired direction. If the ESC recognises the spin, 5 longer
beeps will be generated and the ESC has learned the direction.
Page 33

NOTE: The default ‘pro-Tune’ loaded is Bewweb pro-tune for beginner. For experienced
racers, who require more ‘crisp’ flight characteristics, it is recommended to load the
UmmaGawd tune.
33
Pro-Tuning
During the development of the Vortex, a team of pro-quad pilots spent countless hours,
tweaking the tuning (PIDs) of the flight controller, using various ‘PID Controllers’ supported by
the Cleanflight firmware
Each pilot fed back this data to the ImmersionRC team, and we incorporated it into the OSD
firmware.
Now, as a user, you can choose your favourite pilot, choice of props, battery, flight style, etc.
and all flight controller settings are configured for you, based upon his pro-tune.
Thanks to these pilots, you will spend less time in the field setting up the flight controller
(quite an art), and more time racing.
Page 34

Cleanflight provides a list of receivers stated as working, so please check if yours is listed
here: https://github.com/cleanflight/cleanflight/blob/master/docs/Rx.md
34
R/C (Uplink) Receiver Selection
The Vortex 250 Pro is shipped with three receiver interface cables, one for CPPM, one for
S-Bus, and one for the Spektrum receivers.
CPPM
As it ships, the CPPM cable is pre-installed in the quad. If a CPPM receiver is to be used (such
as the EzUHF, or other CPPM receivers on 2.4GHz) the receiver can simply be attached to the
rear mounting plate, and the cable connected. No other cabling is required.
CPPM sends all PPM channels down a single cable, and eliminates the mass of wiring that
most mini-quads have to contend with.
Note that the Vortex 250 Pro is not compatible with standard R/C receivers with multiple
channels of PWM, each connected via a separate cable.
The receiver should be mounted on the rear of the quad, on the shelf provided. A velcro strap,
or a piece of double-sided tape is the best way to mount the a receiver.
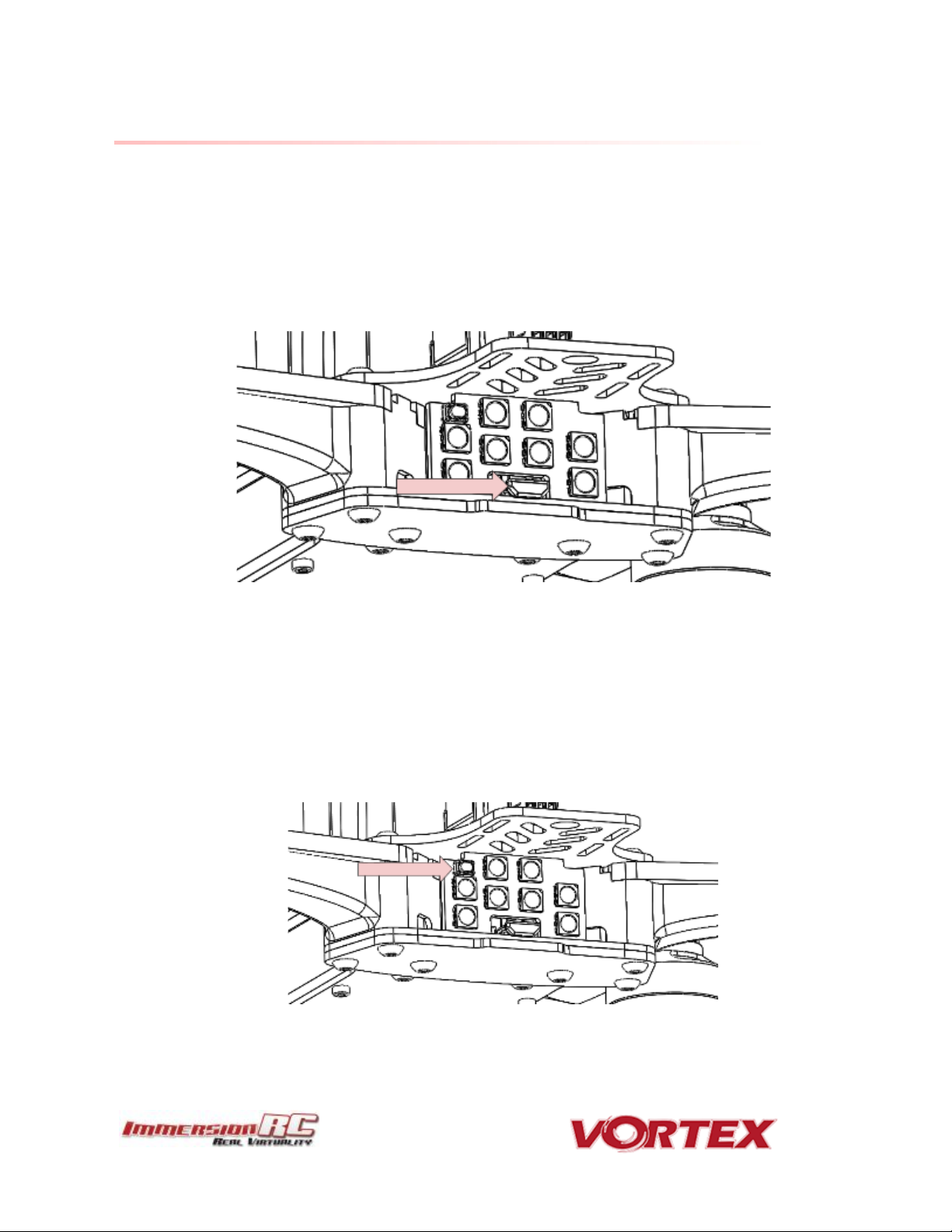
SBus, or Spektrum
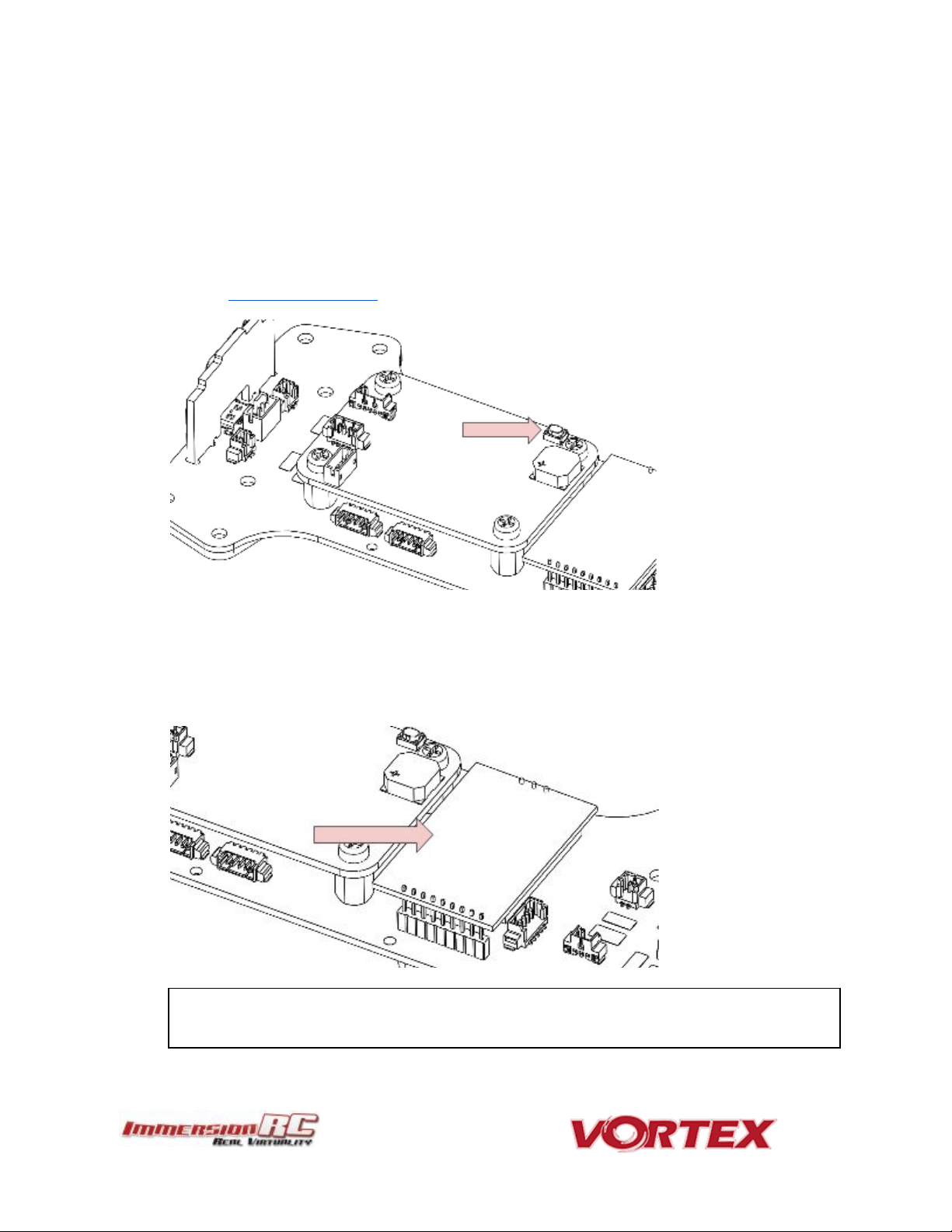
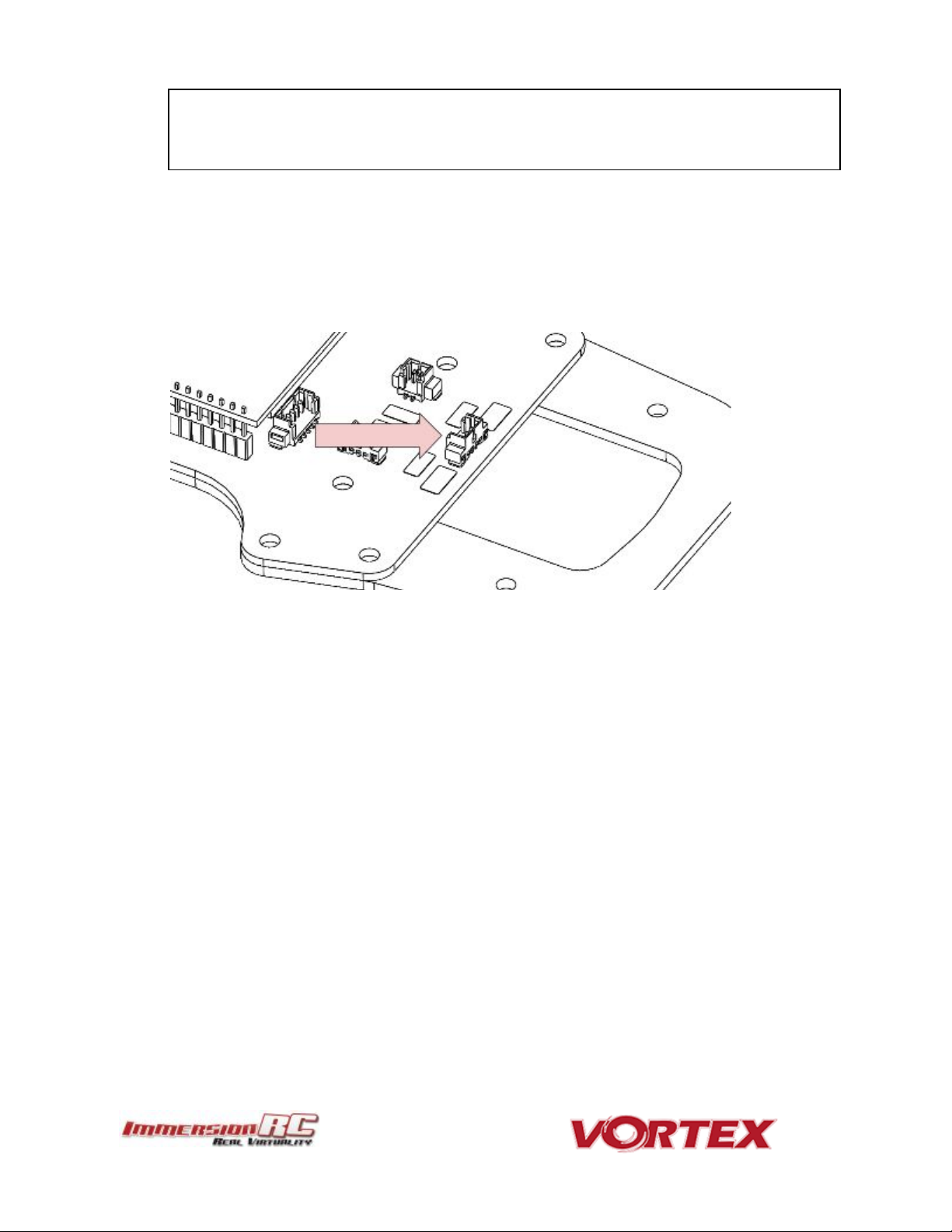
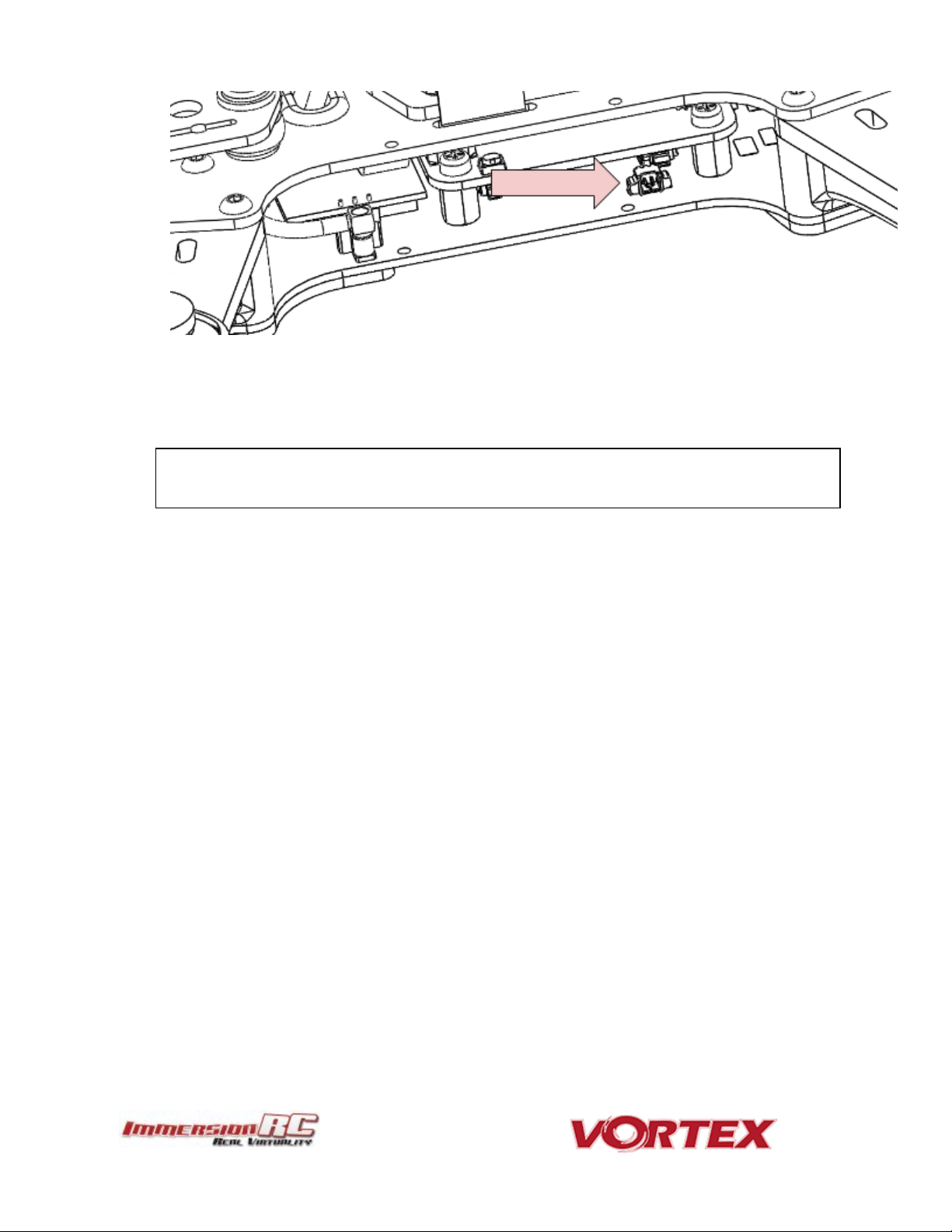
To support one of these receivers, a cable must be installed in the quad, which does require
removing a few screws to access the connector.
1) Remove the screws pointed to below:
Page 35

35
2) Also remove the two screws at the bottom of the right-hand side-plate, and remove the
side-plate.
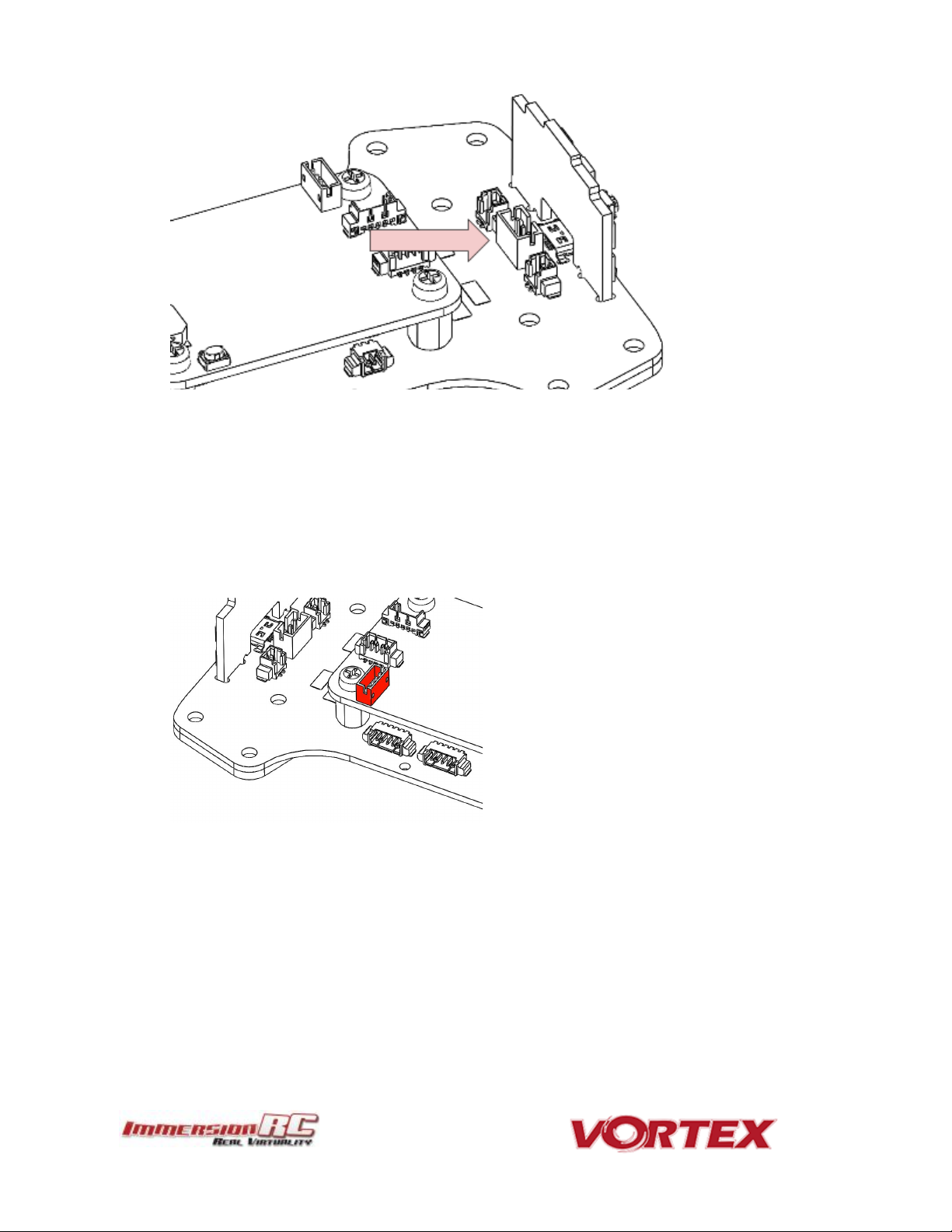
3) Remove the installed CPPM cable.
4) Looking in the right side of the quad, a white connector is visible on the fusion (flight
controller) board.
Install the included S-Bus, or Spektrum cable, as required. Note that the fact that the top plate
screws are removed on the rear of the quad means that the top plate can be eased up a few
millimeters to allow the connector to be installed. Don’t force the two apart too much, or risk
damaging the PDB.
Notes on Receiver Selection
One critical parameter to keep to a minimum in a race quad setup is latency. Latency from
what the camera sees to the display device, and also from the control stick to the flight
controller.
For minimum latency, with reasonable range, the Spektrum™ radios and satellite receivers are
a great choice (with the best average ‘Stick to Flight Controller’ latency that we have
measured). Another good (and quite common) choice is the FrSky Taranis radio with a
matched S-Bus receiver (X4R for example).
For longer-range FPV, the EzUHF system is a good choice. Due to the close proximity of the
electronics and Video Transmitter on a mini-quad, and the lack of a suitable ground-plane, a
diversity receiver, with dipole antennas is highly recommended.
Note: A firmware update for all existing EzUHF receivers, along with the JR Module transmitter,
is now available, and slashes control latency for use with mini-quads.
This update, along with instructions for use, can be found in the EzUHF Owner’s group facebook
page:
https://www.facebook.com/groups/immersionrcezuhf/
Page 36

36
Receiver Auto‐Detection
A unique feature of the Vortex family of quadcopters is that the receiver type is auto-detected
by the OSD when running the wizard.
With the Vortex 250 Pro, it is no longer necessary to manually specify the receiver type with the
ImmersionRC Tools before running the wizard.
Note that occasionally the receiver detection fails, for reasons that are not yet understood. If
this is the case, force the receiver type using the Vortex Configurator chrome app.
R/C Transmitter Configuration
Version 1: OSD Firmware prior to 1.0.0.24
Depending upon the R/C transmitter in use, certain parameters need to be modified in order to
ensure compatibility with the Vortex 250 Pro, and more importantly with the Cleanflight Flight
Controller firmware.
In all cases, during the wizard setup, the current ‘PPM Value’ is shown on-screen beside each
control. This value must be as close as possible to a min. of 1000, center of 1500, and max. of
2000.
It is highly recommended to start with a ‘clean’ configuration (new model) for all radios.
Spektrum™ Radios
Spektrum radios need the following configuration:
- Two channels need reversing, AIL, and RUD.
- Map channel 5 to a 2 or 3-position switch to control flight mode (Acro/Horiz or
Acro/Level/Horiz).
- Verify that the endpoints are 1000/1500/2000 as described above.
FrSky Taranis Radio
- Map channel 5 to a 3-position switch to control flight mode (Acro/Level/Horiz).
- Verify that the endpoints are 1000/1500/2000 as described above.
Futaba S‐Bus Radios
- Map channel 5 to a 3-position switch to control flight mode (Acro/Level/Horiz).
- Reverse channels ELE and THR
- Change subtrim to -31 for THR, AIL, ELE, RUD
- Change travel to +/- 119 on all channels.
- Verify that the endpoints are 1000/1500/2000 as described above.
Version 2: OSD Firmware from 1.0.0.25 onwards
For 250 Pros with recent firmware, the wizard is much ‘smarter’, and is no longer as strict as
far as endpoints, and channel reversing goes.
Page 37

37
During the wizard, which will now request the center, plus each extreme of control movement,
it will automatically determine the channel reverse, and program the flight controller with
appropriate endpoints.
Gaming (Beta)
The Birth of a Gaming Mode ‐ The History
In the Spring of 2015, A bunch of Vortexes (Vortices?), were racing around a field somewhere
in Western Switzerland, while an observer watched.
What the observer noticed is that there was no penalty for high altitude in typical quad racing,
other than when forced through/under obstacles. Racers gained altitude as they gained
speed.
The side-effect of this, is that quad racers don’t often ‘see’ each other during a race, except
near the above mentioned obstacles.
So what if racers were rewarded for being in the same Altitude ‘plane’.. and penalized for
flying too high?
A quick coding session in the Vortex OSD and we had our answer… we had synthesized pure
adrenaline, directly injected into a quad racer’s veins, with no contact required. The entire
dynamics of the race had changed.
How Does It Work?
The concept is simple. Use the altimeter installed in every Vortex to give points for low
altitude, and take points away for high altitude. Every meter of altitude below a threshold (of
10 meters by default) doubles the speed of point accumulation. This creates an enormous
interest in pilots flying just above ground level, at high speeds.
Yes, not every race track is perfectly flat, but all pilots fly the same course, and therefore this
doesn’t really matter.
At the end of the race, the time is shown, along with the points accumulated. How to combine
these two scores is going to wait until the second firmware release, once we have enough
user feedback.
The final score needs to be some fusion of these two scores, in a way that points for low
altitude are rewarded, and fast track times are also rewarded.
Page 38

38
Enabling Gaming Mode
Enter the OSD menu, and change the Landscape to Gamer.
Fly a few laps around your course, and get a rough estimate for the lap time. Enter this value
into the Game Setup menu, along with the number of laps you wish to fly.
Arming the quad will automatically remove the ‘Get Ready’ prompt, and switch to the gaming
landscape:
Page 39

IDEA: for a bit of fun, challenge your fellow internauts to a ‘remote race’. Drop two flags in
a flat field a fixed distance apart, and record your best lap time, and score.
Publish the results, and lets see who the fastest kid on the (worldwide) block is!
39
The bar at the top is a very rough idea of where you are in the multi-lap race (NOTE: There is
no GPS on the Quad, so this is purely time based, but in testing showed to be useful to know
roughly how many laps each pilot had completed).
The bar at the bottom is a ‘fuel gauge’, full battery on the right, empty on the left.
Disarming the quad at the end of the race shows the time, min and max altitude, and the
number of points accumulated.
How the time and points are combined to decide who won is an exercise left to the gamer…
for now. Let us know what you think, and we’ll continue to develop this feature in future
firmware updates.
feedback@immersionrc.com
Page 40

40
Race Guidelines - Flying with Friends
The current generation of FPV Analog video link brings many advantages. Low-cost, and zero
latency being two of the most significant.
They do however suffer from less than ideal ‘selectivity’, even when using large channel
spacing as is the case with RaceBand.
If a few simple rules are followed, quad racing can be a lot of fun.
1) NEVER land near another pilot.
This is an absolutely golden rule. Landing your quad near another pilot, especially one
who is at a significant distance, is like screaming in the ear of someone listening to a
whisper at the other side of a room.
2) NEVER walk back to the pilot area with a powered-up quad
This is similar to 1), and is the most common cause of issues at the race track.
When retrieving a model, unplug the battery before walking back to the pilot area.
3) POSITION the launch and landing zone as far from the pilot area as possible
This ensures that collisions at race start don’t affect other pilots.
A distance of at least 10 meters is recommended, more than this is a bonus.
4) ALWAYS warn in-air pilots before powering up a quad, even if you KNOW it is on a
different channel
Warn pilots, and be ready to power down IMMEDIATELY if a pilot is affected, and wait
until he lands. Remember that it only takes a second or two, when flying race quads at
speed, to crash and damage the quad, and whatever (whoever) it hits.
Page 41

WARNING: This test can be extremely dangerous, great care is required.
The Vortex should be securely anchored to an immovable object, ideally one which doesn’t
block the airflow under the props.
Holding the Vortex during the motor tests is highly in-advised!
41
Diagnostics - Motor Test
Since OSD v1.0.0.22, the Vortex has a built-in motor test. It can be useful to diagnose
problems with ESC and\or Motors.
It’s located in Vortex Menu>Diagnostics>Motor Test
Page 42

42
Page 43

43
Motors will be tested independently in sequence, and then all together.
Use the roll stick left to go to next steps:
Motor1 -> Motor2 -> Motor3 -> Motor4 -> All Motors -> Test Summary
The summary screen and the graph could help you to identify a damaged motor:
Page 44

44
To exit the test move the Roll stick to the left.
Page 45

45
BlackBox - Logging and Tuning
The Vortex 250 Pro is equipped with 2 MB of flash memory dedicated to storing various flight
parameters which may be analyzed after a flight.
In order to benefit from the BlackBox, it should be erased before flying. To do this, enter the
OSD, on the Flight Controller setup page. The erase will take approx 10-30 seconds.
The blackbox log is relatively short on the Vortex 250 Pro, but is sufficient to record enough of
a flight to guide PID tuning.
Page 46

46
Firmware Upgrades
Both the OSD, and the Flight Controller, are updated using the USB port on the rear of the
Vortex.
Prior to any upgrade, please remove all Props!. If for any reason the props spin up during a
firmware upgrade, serious damage to persons and/or property is very likely.
If your Vortex is not recognized as a valid USB device when you plug it in your PC, you will
have to install a driver first. You can download it from here: CP210x USB to UART Bridge VCP
Driver
To update the OSD and Flight Controller you will need to install two chrome applications:
1. vortex-configurator
2. Cleanflight-configurator
OSD Firmware Upgrades
To upgrade the OSD, use the new vortex-configurator chrome app.
Upgrade procedure
1) Connect a Lipo.
Page 47

47
2) Attach the Vortex to a Windows PC or a Mac using a standard Micro-USB cable
(ensure that this is a full USB cable, and not a power-only cable shipped with some
products)
3) Start vortex-configurator from chrome://apps/
4) Make sure the right COM port is selected and press the Flash Firmware button.
5) Point to the update file (OSD_vX.X.X.X.fw) downloadable from the Vortex 250 product
page on the ImmersionRC website, and start the update.
If during a previous upgrade you had a problem causing the OSD to be bricked, you can still
recover from this state using the procedure below:
Upgrade procedure for bricked OSD
1) Press and hold fusion board button.
2) Plug Lipo ( while still holding the fusion board button ).
3) Release fusion board button after 2 seconds.
4) Plug to USB
5) Start vortex-configurator from chrome://apps/
6) Make sure the right COM port is selected and press the Flash Firmware button.
7) Point to the update file downloadable from the Vortex product page on the
ImmersionRC website, and start the update.
Page 48

NOTE: Sometimes it may need few attempts before it starts flashing, so keep trying few
times if upgrade does not start
NOTE: Upgrading Cleanflight to a version not supported by the OSD firmware can easily
result in the OSD not functioning. Please refer to the Vortex product page on the
ImmersionRC website for compatibility information.
NOTE: When Vortex will detect a new flight-controller version, it will automatically restart
in TX Wizard mode.
48
Flight Controller Firmware Upgrades
To upgrade the Flight-Controller firmware, use the cleanflight-configurator:
1) Remove all Props!
2) Connect the Vortex to any PC/Mac/Linux machine which supports the Cleanflight
Configurator
3) Plug Lipo
4) Wait 10 seconds
5) Follow the standard upgrade instructions for Cleanflight (IRCFUSIONF3)
Page 49

49
Appendix A: EzUHF Configuration
The single-cable PPM connection between the EzUHF receiver and the Vortex power board
requires v1.51 (or later) of firmware to support the uplink status.
The configuration of the EzUHF receiver should be as follows:
1) 10 Channel PPM output
2) PPM on servo channel 1
3) UPSTAT on PPM slot 10
Note: To ease programmation of UPSTAT on a receiver equipped with v1.51 of firmware, a new
version of the ImmersionRC tools is required, v1.41. This is now available from our website.
Simply click the ‘Configure for XuGong v2/Pro’ to setup your EzUHF receiver.
Page 50

Flight Controller
Failsafe
Enabled, Throttle set to 1100
OneShot125
Feature Enabled
Rx Mode
PPM Sum Mode (all channels down a single cable)
Minimum Throttle
1100us
Maximum Throttle
1900us
Minimum Command
1015us
Angle mode on Aux1
1300 - 1700us
Horiz mode on Aux1
900 - 1300us
Acro mode on Aux1
1700 - 2100us
Channel Mapping
According to Wizard prompts
Accelerometer
Calibrated at wizard end
Pro-Tuning
Default ImmersionRC settings (based on UmmaGawd’s tune)
NOTE: If you have ‘tweaked’ any Cleanflight settings outside of the Vortex OSD, please
remember to back them up before running the wizard the next time, since it will reset
them to default settings.
50
Appendix B: The Wizard - What else does it setup?
On startup the wizard will reset Cleanflight configuration to its default state.
Once completed the following features, configurations and mode will be injected in
Cleanflight so you can start to enjoy your Vortex straight off the box with zero additional
configuration needed:
Page 51

1 2 3 4 5 6 7 8 1
5740
5760
5780
5800
5820
5840
5860
5880
IRC/FS
2
5658
5695
5732
5769
5806
5843
5880
5917
RaceBand
3
5705
5685
5665
5645
5885
5905
5925
5945
Band E
4
5733
5752
5771
5790
5809
5828
5847
5866
Band B
5
5865
5845
5825
5805
5785
5765
5745
5725
Band A
51
Appendix C: Video Tx - Staying Legal
Depending upon the Vortex variant purchased, and the Tx module installed, the video
transmitter power output level, and available transmit frequencies can vary.
It is highly recommended to understand the rules and regulations in your country before using
the Vortex. Transmitting outside a legal band is something frowned upon by the authorities,
and may result in a fine, or confiscation of equipment.
As a rule of thumb, the following charts should help understand which frequencies are legal in
each of our main markets.
ITU Region 2: Americas, Greenland, eastern Pacific Islands
Assuming that the user has a Ham license, the 5650 - 5925 MHz band may be used.
Note that all 8 channels of ImmersionRC’s RaceBand are legal in in this region, with a Ham
license.
With the FCC power limit for analog transmissions being so low for license-free use, it is not
very interesting for race quad use. At present, ImmersionRC does not ship a ~1mW version of
the Vortex transmitter module. This may change in the future.
Page 52

1 2 3 4 5 6 7 8 1
5740
5760
5780
5800
5820
5840
5860
5880
IRC/FS
2
5658
5695
5732
5769
5806
5843
5880
5917
RaceBand
3
5705
5685
5665
5645
5885
5905
5925
5945
Band E
4
5733
5752
5771
5790
5809
5828
5847
5866
Band B
5
5865
5845
5825
5805
5785
5765
5745
5725
Band A
1 2 3 4 5 6 7 8 1
5740
5760
5780
5800
5820
5840
5860
5880
IRC/FS
2
5658
5695
5732
5769
5806
5843
5880
5917
RaceBand
3
5705
5685
5665
5645
5885
5905
5925
5945
Band E
4
5733
5752
5771
5790
5809
5828
5847
5866
Band B
5
5865
5845
5825
5805
5785
5765
5745
5725
Band A
52
ITU Region 1: Europe, Africa, Middle East, Iraq, Soviet Union
Without a license, only the 25mW Tx module may be used, and then only in the ISM band from
5725 MHz thru 5875 MHz.
ITU Region 1: Europe, Africa, Middle East, Iraq, Soviet Union
With a Ham license, the legal band varies widely from country to country, but taking France as
an example, Ham users may use the band 5650 through 5850 MHz with more than 25mW.
Page 53

53
Appendix D: LED Board - Status report
The LED Board is used by the OSD during the startup phase to report flight controller sensor
status, flight-controller API compatibility and video link status information.
From left to right the bottom led board will turn green ( or red if a problem is detected) one
after another as follows:
1. GYRO sensor detected
2. ACCEL sensor detected
3. BARO sensor detected
4. Flight Controller/OSD APIs Compatible
5. Camera detected
At the end of the initialization sequence, the led board will blink in green if all tests passed, or
it will blink in red if any test failed.
It will also blink in green for 3 seconds when you arm your Vortex.
Page 54

54
Looking after your Vortex
Snow and Water
Even though most of the PCBs in the Vortex are coated with a conformal coating, which does
offer some protection from water, it is not recommended to get the Vortex wet, even if that
water comes in the form of snow.
If your Vortex does get wet, immediately remove power, and place it in a sealed container
containing uncooked rice, for 24 hours. The rice will absorb some of the water.
If the Vortex falls into salt water, damage may be more serious, and requires rinsing the quad
with a bath of distilled water before placing it in the sealed rice container. The Tx module may
not survive this ordeal, and may require replacing.
Note that even if the Vortex survives a salt-water bath, long term corrosive effects of the salt
on any exposed copper surfaces may result in the product failing at some point in the future.
The Sun
The camera use in the Vortex (or any camera for that matter) does not appreciate being left
staring at the sun for long periods of time.
LiPos also have a habit of living short lives when exposed to extreme heat.
It is highly recommended to store the Vortex in the shade between flights.
Dirt
The typical mini-quad tends to live a life coated in a thick layer of grass, dirt, and other
materials which happen to be in the way during landings, whether intentional, or otherwise.
It is highly recommended to keep the Vortex clean of foreign materials, especially those which
tend to conduct electricity when wet.
Jealous Friends
The Vortex does appear to have a kind of magnetic personality which could result in your
Vortex ending up in the bottom of your best mates rucksack.
This is probably the most serious of the issues listed above, take care!
Page 55

Flight Controller
IMU
Invensense 6050, 3 axis Gyro, 3 axis Accelerometer
Altimeter
Bosch BMP180
CPU
STM32F303 32-bit ARM processor
Firmware
Cleanflight compatible (with API version matching that of the OSD)
OSD
CPU
STM32F373 32-bit ARM processor
Resolution
440H x 280V
Style
White, with black surround around all pixels
Output
Programmable Black/White levels
Video Tx Features
Transmitter Module
Socketed, Custom NexWaveRF 5.8GHz module
Channels
40 Initially, programmed via OSD
Bands
5, including the ImmersionRC/FatShark bands, and RaceBand
Frequency, IRC/FS
5740, 5760, 5780, 5800, 5820, 5840, 5860, 5880 MHz
Frequency, RaceBand,
CH1..8
5658, 5695, 5732, 5769, 5806, 5843, 5880, 5917 MHz
Frequency, ‘A’ Band, CH1..8
5865, 5845, 5825, 5805, 5785, 5765, 5745, 5725 MHz
Frequency, ‘B’ Band, CH1..8
5733, 5752, 5771, 5790, 5809, 5828, 5847, 5866 MHz
Frequency, ‘E’ Band, CH1..8
5705, 5685, 5665, 5645, 5885, 5905, 5925, 5945 MHz
Power Output
350mW +/- 1dB (25mW module optional)
Audio
Stereo, Right channel used for Telemetry, Left channel routed to Mic
connector
Recommended Antenna
Supplied SpiroNET Omni, Skew Planar, 4 leaf
External vTx Support
5-pin PicoBlade connector, usable only when the RF module is removed.
Note: Using an external vTx does not allow OSD channel switching.
Power Train
Standard Prop
Gemfan 5045
Maximum Prop Size
6” (without GoPro, use the optional 6” arms for longer props)
Stock Motors
OEM V-Spec 2204-2300kV, single-strand
Recommended Battery
1300mAh 3S 45~90C, or 1300mAh 4S 45~90C
ESC
55
Specifications
Page 56

Type
ImmersionRC EzESC
Rating
20A continuous, 16A peak
Features
OneShot125, and Motor Braking
Processor
32-bit ARM
R/C Receiver
Channels Required
Absolute minimum four. Five recommended to support mode switch.
Interface Standard
CPPM, S-Bus, Spektrum, XBus, SumH, SumD (auto-sense with manual
override)
Receiver Power
+5V, or +3.3V @ 200mA max.
Flight Characteristics
Flight Time
Depends upon battery, and flight style
Maximum Range
Highly dependent on battery, and flying style
Maximum Speed
> 100km/h with appropriate props and battery
Blackbox Support
Compatibility
Integrated 2MB flash memory.
Camera Support
Onboard GoPro Supply
+5v at 1A
Video Standard
Composite, PAL or NTSC, switchable using a camera-mounted jumper
Weight and Size
Weight, as Shipped, ARF
~415g
Size
250mm between diagonal motors
56
Page 57

Part Numbers
V25PCK1RD
Pimp Kit, plastic parts, Red (stock)
V25PCK1PK
Pimp Kit, plastic parts, Hot Pink
V25PCK1BK
Pimp Kit, plastic parts, Black
V25PCK1OR
Pimp Kit, plastic parts, Orange
V25PCK1GN
Pimp Kit, plastic parts, Lime Green
V25PCK1BL
Pimp Kit, plastic parts, Blue
V25PCK1LV
Pimp Kit, plastic parts, Lavender (limited edition)
V25PCK1PL
Pimp Kit, plastic parts, Purple
V25PCK1YL
Pimp Kit, plastic parts, X-Blade Yellow (limited edition)
V25PUPGLT1
Race Kit, Stage 1 (titanium screws, etc.)
V25PCK3
5” (stock) replacement arm
V27PCK3
6” replacement arm (for use with 6” props, and 2000kV motors)
V25PCK4
Replacement CF Top plate
V25PCK5
Replacement FR4 front-bumper kit
V25PCK6
Replacement flight camera mount
V25PCK7
Hardware pack
V25PDB
Replacement Power Distribution PCB
V25PCAB
Cable set
V25PZCASE
Zipper case
V25PVS220423
Replacement 2204-2300kV motor (stock motor)
VXAVTX25
25mW 5.8GHz Tx module, Vortex-only (EU-Legal)
VXAVTX350
350mW 5.8GHz Tx module, Vortex-only (International)
EZESC20
Replacement 20A ESC
V25PCK2
GoPro Recliner Set
VXLED
Stock 8-LED board (soldering required)
VXLED250
Upgrade 12-LED board with diffuser, and solder-free installation
57
Spare parts and Upgrades
Several crash kits, and upgrades, are available for the Vortex, including the following:
Please contact your reseller for any spare parts required.
Page 58

58
Support
First line of support is handled by the reseller. If you encounter any problems with your
ImmersionRC product please contact them first.
For support on issues involving equipment from other brands and also general support for
ImmersionRC products, the best place to go is the ImmersionRC section of FPVlab.com.
We actively monitor this forum and provide support here.
A very active Facebook Group is also a good place to go with support, or any other pre/post
sales inquiries for the Vortex product line:
https://www.facebook.com/groups/ImmersionrcVortex
As a last resort, ImmersionRC runs a global network of repair and support centers. These
handle warranty repairs, supply hard-to-find spare parts, and also handle non-warranty work.
Send an email to repairs@immersionrc.com to open a support ticket.
Page 59

59
Frequently Asked Questions
Q. I have taken my 250 Pro apart, and this ‘Spring Thing’ popped out, where does
it go?
The ‘Spring Thing’ is a dual-purpose part which fits above the video transmitter module.
It serves three purposes, first it mechanically restrains the video transmitter module during a
serious collision.
Secondly, it acts as a heat-sink, transmitting heat from the transmitter module into the air, and
into the frame.
Lastly, it reduces damaging forces on the PDB during a serious crash, which could result in
cracks in the copper traces.
To install the spring, assemble the Vortex completely except for the side plates. Assemble the
side plates while inserting the spring.
Page 60

60
Q. How do I calibrate my 250 Pro ESCs?
DO NOT CALIBRATE THEM!. ImmersionRC ESCs use quality components with accurate timing
and never require calibration!.
Q. Can I fly in the rain?
ImmersionRC is one of the only companies in the racing quad business which conformally
coats key PCBs to add a level of water-resistance. This avoids problems when flying in very
humid areas, occasional crashes in wet grass, and the occasional use of the front of the quad
as a snow-shovel.
That said, not all components like getting soaked, the R/C Rx for example, or the sensitive
video transmitter module. For this reason, flying in the rain (which isn’t much fun anyway) is
not really recommended.
Q. I dunked my 250 Pro in the ocean/lake/pond, what do I do?
First thing to do (especially where highly corrosive salt water is involved) is to rinse the entire
quad in distilled water (available where car parts are sold, used to refill car batteries).
This rinsing process will remove potentially conductive salts from the water, and will ensure
that they don’t remain after drying.
Once the quad is rinsed, place it in a zip-lock bag filled with rice, and leave it in a warm place
for at least 48 hours. The rice will absorb the remaining water, and increase the chances of
life for your quad after the dunk.
Q. Do I really need to de‐solder wires to install a pimp kit?
Yes and no… Early shipments of the 250 Pro included a plastic design for the ESC covers
which passed the wires through the hole in the ESC cover. These did require de-soldering of
the power wires to replace the covers.
Later models, and many of the colored pimp-kits currently being sold, have a slightly different
design, where the wires are passed through slots, and don’t require de-soldering to replace
them.
Page 61

61
Q. What is the deal with the new LED board?
In early 2016, Vortex 250 Pros started shipping with a new LED board. This LED board
increases the LED count from 8 to 12, adds a diffuser to greatly increase visibility from the
side/top/bottom of the quad, and also adds the possibility for a solder-free connection to the
PDB.
This new board is available as a retrofit kit, part number VXLED250.
Q. My motors are ‘stuttering’, and the quad falls out of the sky under full throttle
This is almost always due to motor screws touching the windings. Motor screw length on any
mini-quad is absolutely critical, especially for ‘upgrade’ motors which have extremely thin
base material.
Q. My R/C Receiver isn’t auto‐detected by the wizard
Normally, the 250 Pro will start up in a receiver ‘auto-detect’ mode which will automatically
identify the connected PPM/SBUS/DSMX. Receiver.
From time to time (for reasons not yet understood) this process fails. To work around this,
simply connect the quad to a PC/Mac and using the Vortex Configurator manually set the
receiver type.
Q. I don’t like the stock camera, and would like to upgrade it
There are a couple of ways to do this. First one is simple and involves a lense replacement.
Page 62

62
The FatShark ‘GoPro’ lens (product ID 1752) increases the FOV of the stock camera, and
makes it much more suitable for racing, and freestyle.
If instead a CCD replacement is preferred, the common HS1177 (available under several
names from different manufacturers) is a good choice.
Note that due to the built-in OSD function, this camera has 4, instead of the stock 3 pins on
the connector. The standard cable may still be used however, using the 3 pins on one side of
the connector, ensuring that the Vid/Gnd/5V pins match the stock cable (Red = 5V, Black =
Gnd, White = Vid).
Q. The bell on one of my motors worked loose
With the first batch of 250 Pros that were produced, our motor supplier did have a quality
issue, where there was a chance that the motor bell could work loose during flight.
These motors are being replaced under warranty, just send an email to
repairs@immersionrc.com including a photo of the motor and bell.
Q. My vortex beeps continuously
The beeps are coming from the ESC’s. They start to beep when they don’t receive any PWM.
If all the ESC’s are beeping; it’s probably a flight-controller issue, in that case try to reflash it
with Cleanflight-Configurator. Check also the fusion board is still powered as +5V regulator
may be damaged.
If only one ESC is beeping; it’s probably a HW issue, so in that you will have to check wiring for
this ESC.
Q. My vortex is playing Crazy Train song
The tunes is emitted by ESC when overvoltage is detected (> 17.4 V). For the 20A ESCs, the
maximum voltage tolerated is that supplied by 4s HV LiPo packs.
Note that if the ESC gets wet, it can cause it to believe that an overvoltage condition exists.
Q. My vortex emits 2 long beeps followed by a short beep on startup (‐‐·)
This sequence is played on startup when the vortex was not able to detect a camera.
In that case you should check the camera is correctly plugged on both side.
Page 63

63
Q. When I fly, all I see is the ground
Tilt the flight camera up! (but beware that landing with a heavily tilted flight camera can be
more of a challenge).
A useful trick when setting camera angle is to take note of the position of your head while
flying. If you find yourself constantly looking up, angle the camera up. If you find yourself
constantly looking down, angle the camera down.
Q. My Vortex flips instead of taking off
Check that the correct props (CW vs. CCW) are installed in the correct locations.
Also check that the props rotate in the correct direction, and run RotorSENSE on each motor
that needs reversing.
Q. I updated to the latest BetaFlight x.y.z and my quad is no longer tuned
BetaFlight is a superb piece of software, updated almost daily to add new features, and is
really the ‘bleeding edge’ of flight controller code. Unfortunately, this also means that
‘stability’, or ‘backwards compatibility’ is not a priority.
The Pro-Tunes shipped with the Vortex 250 Pro were painstakingly learned using the version
of Cleanflight/Betaflight that we shipped with. We cannot guarantee that all future versions of
either of these firmware bases will keep this same fine level of tune.
From time to time we will commit to providing updates which synchronize the OSD, Flight
Controller, and the Pro-Tunes. Check the ImmersionRC website, Vortex 250 Pro page
occasionally for news on these updates. .
Page 64

64
Regulatory notice
The use of this product may be prohibited in your country/region/state, please verify that the
RF output power and frequencies used by this transmitter comply with local rules and
regulations, this product may require a license to operate.
Directions on safety
ImmersionRC advocates the safe use of their products, always make sure you equipment is in
proper working order, is checked prior to every flight and that your are familiar with and
respect the equipment's capabilities and limitations. Do NOT fly recklessly, do NOT fly near
airports, freeways, towns, people, etc, basically anywhere where a equipment failure or pilot
error can result in injury or damage to people and/or property.
Warranty
For warranty claims or repair requests please consult the retailer that you purchased this
product from, they will be able to help you with your warranty claim or repair request.
Page 65

65
Social Networks
LikeUs
We would like thank you for purchasing this ImmersionRC product.
Like ImmersionRC’s Facebook page and be kept up-to-date with news, product releases,
firmware updates, tips and tricks, and other information relevant to the FPV hobbyist.
http://www.facebook.com/ImmersionRC
You can also follow us on Google Plus
google.com/+immersionrc
We have even been known to Tweet on occasion
https://twitter.com/@immersionrc
 Loading...
Loading...