

Page 1

Programmers Guide
Interface description
3D Camera
O3X100
UK
706447 / 00 12 / 2018
Page 2

3D camera O3X1xx
Contents
1. Preliminary note...................................................................4
1.1 Symbols used .................................................................4
1.2 Safety instructions .............................................................4
1.3 Further documents .............................................................4
2. System requirements...............................................................4
2.1 Software .....................................................................4
2.2 Hardware and accessories .......................................................4
3. Required Ports....................................................................5
4. XML-RPC Interface ................................................................5
4.1 Sample XML-RPC command .....................................................5
4.2 XML-RPC Objects .............................................................6
4.2.1 Main Object...............................................................7
4.2.2 Session Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
4.2.3 EditMode Object ...........................................................7
4.2.4 DeviceConfig Object........................................................7
4.2.5 Device/NetworkConfig Object.................................................7
4.2.6 TimeConfig Object .........................................................7
4.2.7 Application Config Object ....................................................7
4.2.8 Application/Imager Config Object ..............................................8
5. Process Interface..................................................................9
5.1 Protocol structure ..............................................................9
5.2 Receiving Images .............................................................10
5.3 Image data ..................................................................10
5.3.1 Chunk type . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10
5.3.2 Available chunk types......................................................11
5.3.3 Pixel format..............................................................12
5.4 Additional Information for CONFIDENCE_IMAGE ....................................13
6. XML-RPC Command Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
6.1 Parameter API ...............................................................14
6.2 Main Object..................................................................15
6.3 Session Object ...............................................................19
6.4 Edit Mode Object .............................................................21
6.5 Device Config Object ..........................................................21
6.6 Device/Network Config Object ...................................................23
6.7 Time Config Object ............................................................24
6.8 Application Config Object .......................................................25
6.9 Application/Imager Config Object .................................................27
6.10 Exposure modes.............................................................29
2
Page 3

3D camera O3X1xx
UK
Licences and trademarks
Microsoft®, Windows®, Windows 7®, Windows 8®, Windows 8.1® and Windows 10® are registered
trademarks of Microsoft Corporation.
Adobe® and Acrobat® are registered trademarks of Adobe Systems Inc.
All trademarks and company names used are subject to the copyright of the respective companies.
This device contains (maybe modified) open source software which is subject to special licensing terms.
For copyright information and licensing terms please refer to: www.ifm.com/int/GNU
For software subject to the GNU General Public License or the GNU Lesser General Public License the
source code can be requested against payment of the copying and shipping costs.
3
Page 4
3D camera O3X1xx
1. Preliminary note
This document describes the software interfaces of the O3X1xx 3D camera.
1.1 Symbols used
► Instructions
> Reaction, result
[…] Designation of keys and buttons
"…" Name of display text
→ Cross-reference
Important note
Non-compliance may result in malfunction or interference.
Information
Supplementary note
1.2 Safety instructions
Please read the operating instructions prior to set-up of the device. Ensure that the device is suitable for
your application without any restrictions.
If the operating instructions or the technical data are not adhered to, personal injury and damage to
property can occur.
1.3 Further documents
● Operating instructions
● Interface description
The documents can be downloaded at:
www.ifm.com
2. System requirements
2.1 Software
Windows 7 (32/64 bit), Windows 8.1 (32/64 bit), Windows 10 (32/64 bit)
2.2 Hardware and accessories
Hardware:
– Camera of the O3X1xx product family
– PC with x86 or x64 type processor
– Screen: min. 1024 x 768 pixels, 32 bit colour depth
– Ethernet interface
The Ethernet interface can be retrofitted with an USB-to-Ethernet adapter.
Accessories:
– Power supply 24 V, 1.6 A, min. peak current 2.4 A
You will find further information about available accessories at:
www.ifm.com
4
Page 5

3D camera O3X1xx
3. Required Ports
The following ports are required for the camera configuration using XML-RPC and for receiving data on
the process interface. They must not be blocked by a firewall or router.
● TCP/HTTP: 80
● TCP: 50010
If the ifm Vision Assistant is used, the following additional ports must also be available:
● UDP: 3321
● TCP/HTTP: 8080
4. XML-RPC Interface
In case the device should not be configured by the ifm Vision Assistant, the XML-RPC interface can be
used instead.
General information about XML-RPC is found on the website http://xmlrpc.scripting.com/spec
To send a command via the XML-RPC interface the command is in a special layout. In this command,
linefeeds and carriage returns are essential.
Every command which is sent via the XML-RPC interface must end with carriage return <CR> and
linefeed <LF>.
Several commands will use different URLs in the XML-RPC header.
Preferably use the ifm3Dlib for access to the device under Linux. The library has been tested and is
the reference implementation for C++. The library is supported by ifm electronic and the company
Lovepark Robotics.
A detailed example is available on the web at:
https://github.com/ifm/ifm3d-examples/blob/master/file_io/ex-file_io.cpp
4.1 Sample XML-RPC command
UK
All following XML-RPC commands will have this type of layout:
POST /RPC3 HTTP/1.0<CR><LF>
User-Agent: Frontier/5.1.2 (WinNT)<CR><LF>
Host: betty.userland.com<CR><LF>
Content-Type: text/xml<CR><LF>
Content-length: 181<CR><LF>
<CR><LF>
<?xml version="1.0"?><CR><LF>
<methodCall><CR><LF>
<methodName>examples.getStateName</methodName><CR><LF>
<params><CR><LF>
<param><CR><LF>
<value><i4>41</i4></value><CR><LF>
</param><CR><LF>
</params><CR><LF>
</methodCall><CR><LF>
5
Page 6
3D camera O3X1xx
The following example contains one O3X1xx command:
POST /api/rpc/v1/com.ifm.efector/ HTTP/1.1<CR><LF>
Host: 192.168.0.69<CR><LF>
Content-Type: text/xml<CR><LF>
User-Agent: Python-xmlrpc/3.4<CR><LF>
Content-Length: 160<CR><LF>
<CR><LF>
<?xml version='1.0'?> <CR><LF>
<methodCall><CR><LF>
<methodName>getParameter</methodName><CR><LF>
<params><CR><LF>
<param><CR><LF>
<value><string>Name</string></value><CR><LF>
</param><CR><LF>
</params><CR><LF>
</methodCall><CR><LF>
4.2 XML-RPC Objects
To communicate and to configure the device via XML-RPC the XML-RPC commands have to use
different XML-RPC objects. Different commands need different XML-RPC objects (see XML-RPC
command references).
The interface of O3X1xx is structured in an object-oriented way. Some of the objects are available all
the time, others are only available after bringing the device into a special mode by calling a method
on an already available object. This mechanism is used to create system requirements (e.g. password
protection).
It could be necessary to send heartbeats so that there will be no session timeout.
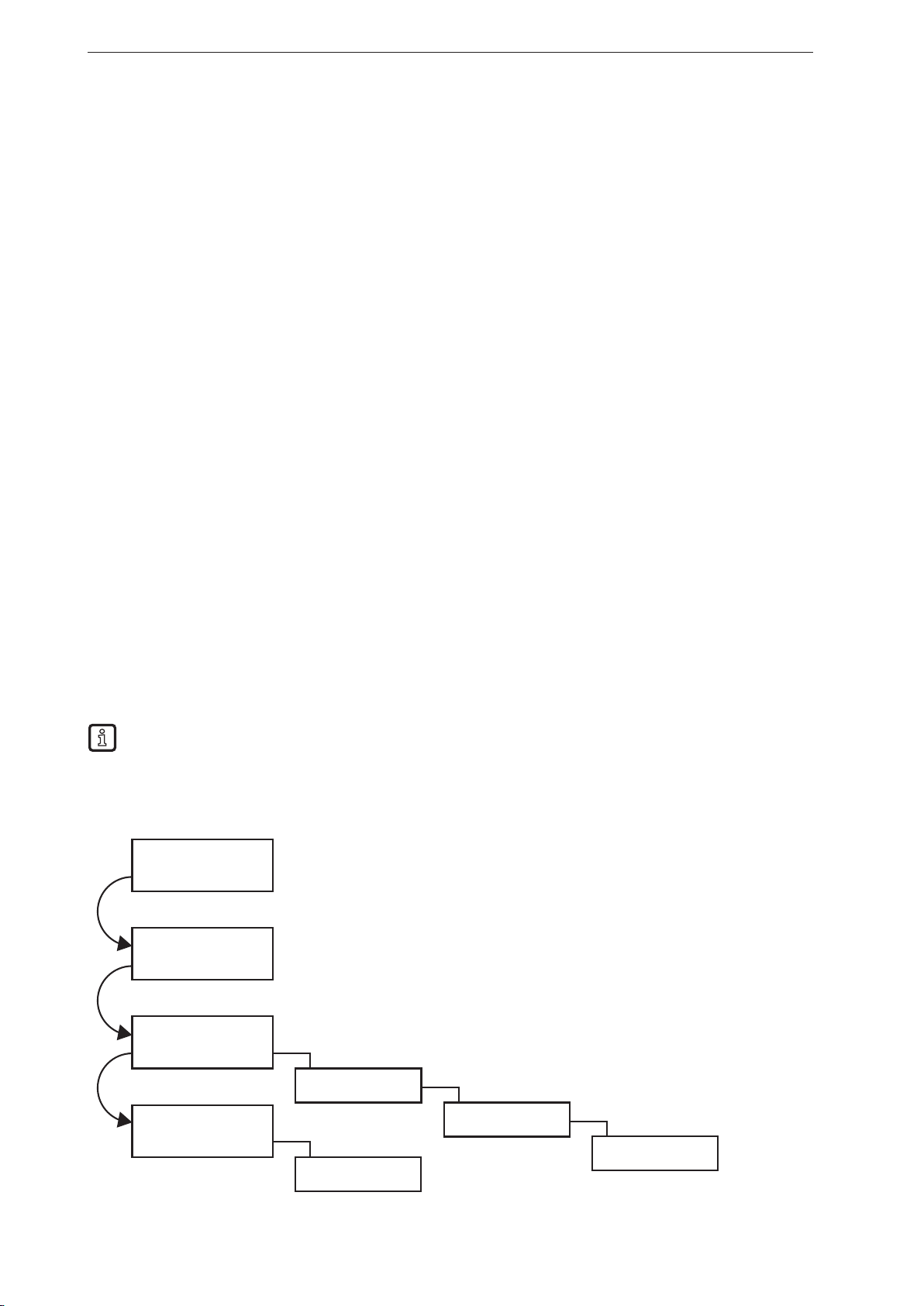
The following diagram should give an overview how objects are related to each other and which methods
must be called to make others available:
Main API
requestSession(...)
Session
EditMode
DeviceConfig
ApplicationConfig
NetworkConfig
TimeConfig
ImagerConfig
6
Page 7
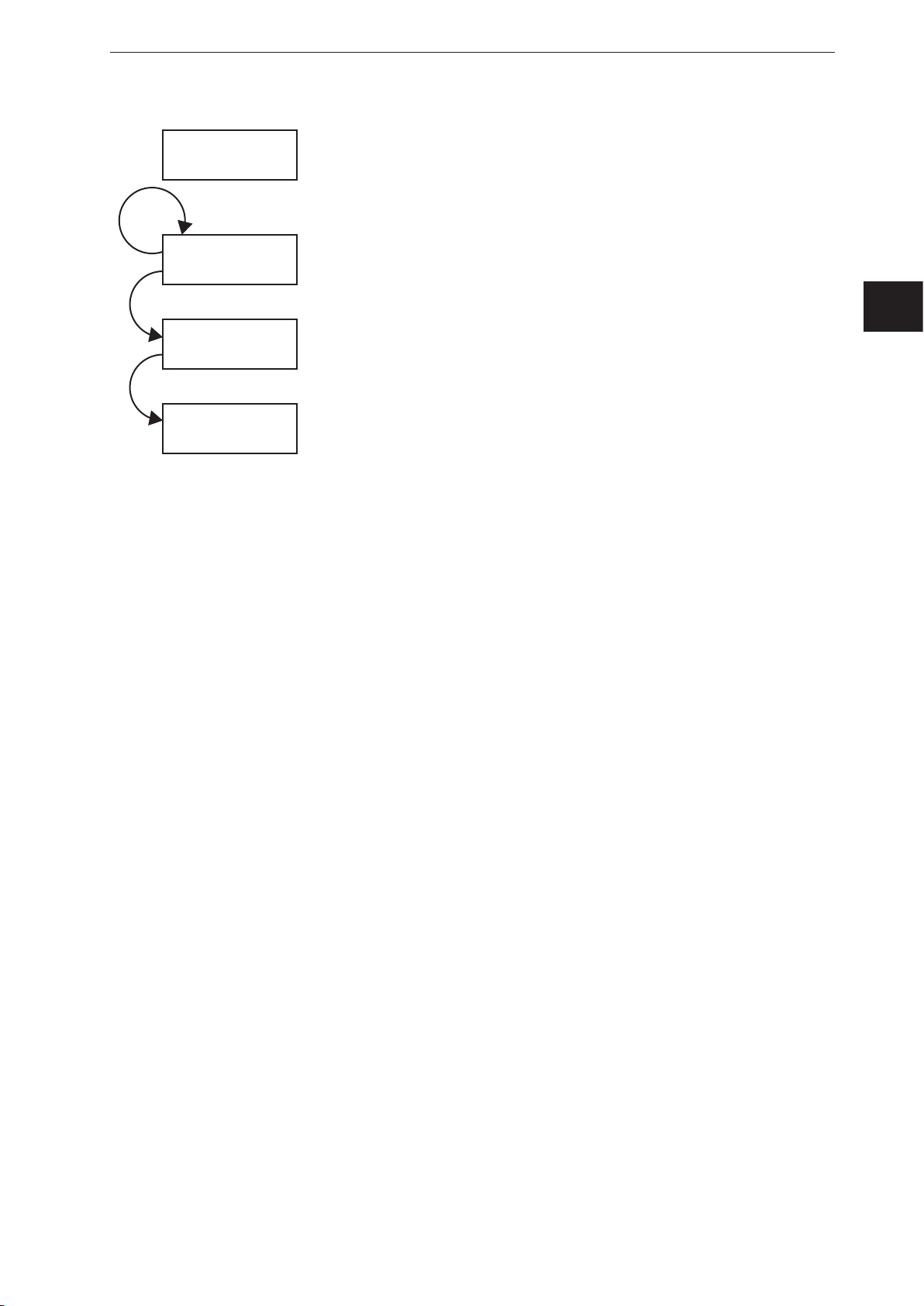
Main API
cancelSession(...) removes itself from RPC. Session will also
be removed, if heartbeat(...) is not called at the right time
Session
EditMode
ApplicationConfig
4.2.1 Main Object
3D camera O3X1xx
UK
Object-URI: /api/rpc/v1/com.ifm.efector/
This is the main object of RPC. It contains methods to open a session. Most of its methods are only
getters, because it should be possible to protect editing with a password.
4.2.2 Session Object
Object URI e.g.: /api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/
The URL part “d21c80db5bc1069932fbb9a3bd841d0b” is the session ID. It is returned by the command
"requestSession" of the main object. If the command "requestSession" is called without a user-defined
session ID, which can be passed as a parameter, a random session ID is generated automatically.
4.2.3 EditMode Object
Object URI e.g.: /api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/
4.2.4 DeviceCong Object
Object-URI e.g.: /api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/device/
4.2.5 Device/NetworkCong Object
Object URI e.g.:
/api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/device/network/
4.2.6 TimeCong Object
Object URI e.g.:
/api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/device/time/
4.2.7 Application Cong Object
Object URI e.g.:
/api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/application/
7
Page 8

3D camera O3X1xx
4.2.8 Application/Imager Cong Object
Object URI e.g.:
/api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/application/imager_001/
As there is only one imager config on the device, the ID must be fixed to "001". Data of this object is
persistently saved when calling "save" on the application config object. The imager config RPC object
has multiple sub-types. Only parameters relevant for a specific type are available while it is active. They
are based on frequency (extending the distance) and integration intervals (extending the measurement
details).
Type names, based on ifm Vision Assistant draft:
● upTo02m_low
● upTo02m_moderate
● upTo03m_low
● upTo03m_moderate
● upTo07m_low
● upTo07m_moderate
● upTo15m_low
● upTo15m_moderate
● upTo30m_low
● upTo30m_moderate
8
Page 9

3D camera O3X1xx
5. Process Interface
The process interface is used during the normal operation mode to get operational data (e.g. 3D images,
process values) from the O3X1xx.
5.1 Protocol structure
This protocol conforms to the version 3 of the O2V/O2D products.
Structure of the protocol:
<Ticket><length>CR LF <Ticket><content>CR LF
Abbreviation Description ASCII code (dec) ASCII code (hex)
CR Carriage Return 13 D
LF Linefeed 10 A
< > Marking of a placeholder
(e.g. <code> is a placeholder for code)
[ ] Optional argument
(possible but not required)
Command Description
<content> It is the command (e.g. trigger the unit).
<ticket> It is a character string fixed to 0000. The device will reply with the same ticket number.
<length> It is a character string beginning with the letter 'L' followed by 9 digits. It indicates the
length of the following data (<ticket><content>CR LF) in bytes.
UK
It is not possible to send commands.
9
Page 10

3D camera O3X1xx
5.2 Receiving Images
For receiving the image data a TCP/IP socket communication is established. The default port number is
50010. After opening the socket communication, the O3X1xx device will automatically (if the device is in
free run mode) send the data through this socket to the TCP/IP client (PC).
PCIC output per frame. The following data is submitted in this sequence:
Component Content
Ticket „0000“
Start sequence String "star" (4 bytes)
Normalised amplitude image
Output format: 32-bit floating point number
Distance image
Output format: 32-bit floating point number.
Unit: m.
Combined XYZ image
Output format: 32-bit floating point number.
Unit: m.
Confidence image
1 image
1 image
1 image
1 image
Output format: 8-bit unsigned integer
Grayscale image
Output format: 32-bit floating point number
Stop sequence String "stop" (4 bytes)
Ticket signature <CR><LF>
Only configured images will be displayed.
1 image
5.3 Image data
For every image there will be a separate chunk. The chunk is part of the response frame data of the
process interface.
The header of each chunk contains different kinds of information. This information is separated into bytes.
The information contains e.g. the kind of image which will be in the “PIXEL_DATA” and the size of the
chunk.
5.3.1 Chunk type
Offset Name Description Size [byte]
0x0000 CHUNK_TYPE Defines the type of the chunk. For each distinct chunk
an own type is defined.
0x0004 CHUNK_SIZE Size of the whole image chunk in bytes. After this count
of bytes the next chunk starts.
0x0008 HEADER_SIZE Number of bytes starting from 0x0000 until PIXEL_
DATA.
0x000C HEADER_VERSION Version number of the header 4
0x0010 IMAGE_WIDTH Image width in pixel 4
0x0014 IMAGE_HEIGTH Image height in pixel 4
0x0018 PIXEL_FORMAT Pixel format 4
0x001C TIME_STAMP Time stamp in microseconds 4
0x0020 FRAME_COUNT Frame count according to algorithm output 4
0x0024 STATUS_CODE Errors on the device 4
4
4
4
10
Page 11

3D camera O3X1xx
Offset Name Description Size [byte]
0x0028 TIME_STAMP_SEC Timestamp seconds 4
0x002C TIME_STAMP_NSEC Timestamp nanoseconds 4
0x0030 PIXEL_DATA The pixel data in the given type and dimension of the
image. Padded to 4-byte boundary.
4
5.3.2 Available chunk types
Constant Value Description
USERDATA 0 Undefined user data with arbitrary content
RADIAL_DISTANCE_
IMAGE
100 Each pixel of the distance matrix denotes the ToF distance
measured by the corresponding pixel or group of pixels of
the imager. The distance value is corrected by the camera's
calibration, excluding effects caused by multipath and multiple
objects contributions (e.g. "flying pixels"). Reference point is the
optical centre of the camera inside the camera housing.
Invalid PMD pixels (e.g. due to saturation) have a value of zero.
Data type: 32-bit floating point number
UK
Unit: millimetres
NORM_AMPLITUDE_
IMAGE
AMPLITUDE_IMAGE 103 Each pixel of the amplitude matrix denotes the amount of
101 Each pixel of the normalized amplitude image denotes the raw
amplitude (see amplitude image below for further explanation),
normalized to exposure time. Furthermore, vignetting effects
are compensated, ie the darkening of pixels at the image border
is corrected. The visual impression of this grayscale image is
comparable to that of a common 2D camera.
Invalid PMD pixels (e.g. due to saturation) have an amplitude value
of 0.
Data type: 32-bit floating point number
modulated light (i.e. the light from the camera's active illumination)
which is reflected by the appropriate object. Higher values indicate
higher PMD signal strengths and thus a lower amount of noise on
the corresponding distance measurements. The amplitude value
is directly derived from the PMD phase measurements without
normalisation to exposure time. In multiple exposure mode,
the lack of normalisation may lead (depending on the chosen
exposure times) to inhomogeneous amplitude image impression, if
a certain pixel is taken from the short exposure time and some of
its neighbours are not.
Invalid PMD pixels (e.g. due to saturation) have an amplitude value
of 0.
CARTESIAN_X_
COMPONENT
Data type: 32-bit floating point number
200 The X matrix denotes the X component of the Cartesian coordinate
of a PMD 3D measurement. The origin of the camera's coordinate
system is in the middle of the lens' front glass, if the extrinsic
parameters are all set to 0.
Data type: 32-bit floating point number
Unit: millimetres
11
Page 12

3D camera O3X1xx
Constant Value Description
CARTESIAN_Y_
COMPONENT
201 The Y matrix denotes the Y component of the Cartesian coordinate
of a PMD 3D measurement. The origin of the camera's coordinate
system is in the middle of the lens' front glass, if the extrinsic
parameters are all set to 0.
Data type: 32-bit floating point number
Unit: millimetres
CARTESIAN_Z_
COMPONENT
202 The Z matrix denotes the Z component of the Cartesian coordinate
of a PMD 3D measurement. The origin of the camera's coordinate
system is in the middle of the lens' front glass, if the extrinsic
parameters are all set to 0.
Data type: 32-bit floating point number
Unit: millimetres
CARTESIAN_ALL 203 CARTESIAN_X_COMPONENT,
CARTESIAN_Y_COMPONENT,
CARTESIAN_Z_COMPONENT
UNIT_VECTOR_ALL 223 The unit vector matrix contains 3 values [ex, ey, ez] for each PMD
pixel, i.e. the data layout is [ex_1,ey_1,ez_1, ... ex_N, ey_N, ez_N],
where N is the number of PMD pixels.
Data type: 32-bit floating point number (3x per pixel)
CONFIDENCE_IMAGE 300 See Additional Information for Image Data (→ 5.4)
5.3.3 Pixel format
Constant Value Description
FORMAT_8U 0 8-bit unsigned integer
FORMAT_8S 1 8-bit signed integer
FORMAT_16U 2 16-bit unsigned integer
FORMAT_16S 3 16-bit signed integer
FORMAT_32U 4 32-bit unsigned integer
FORMAT_32S 5 32-bit signed integer
FORMAT_32F 6 32-bit floating point number
FORMAT_64U 7 64-bit unsigned integer
FORMAT_64F 8 64-bit floating point number
Reserved 9 N/A
FORMAT_32F_3 10 Vector with 3x32-bit floating point number
12
Page 13

5.4 Additional Information for CONFIDENCE_IMAGE
Bit Value Description
0 1 = pixel invalid Pixel invalid
The pixel is invalid. To determine whether a pixel is valid or not
only this bit needs to be checked. The reason why the bit is
invalid is recorded in the other confidence bits.
1 1 = pixel saturated Pixel is saturated
Contributes to pixel validity: yes
2 1 = bad A-B symmetry A-B pixel symmetry
The A-B symmetry value of the four phase measurements is
above threshold.
Remark: This symmetry value is used to detect motion
artefacts. Noise (e.g. due to strong ambient light or very short
integration times) or PMD interference may also contribute.
Contributes to pixel validity: yes
3 1 = amplitude below
minimum amplitude
threshold
4 1 = exposure time Exposure time indicator.
Amplitude limits
The amplitude value is below minimum amplitude threshold.
Contributes to pixel validity: yes
3D camera O3X1xx
UK
The bit is always set in single exposure mode. It is set in double
exposure mode when the long exposure time is used.
Contributes to pixel validity: no
5 1 = assignment error Double Frequency assignment error.
The bit indicates a double frequency mismatch while calculating
the final distance. Possible reasons are fast movement in the
scene or disturbances due to straylight.
Contributes to pixel validity: yes
6 Reserved
7 Reserved
13
Page 14

3D camera O3X1xx
6. XML-RPC Command Reference
6.1 Parameter API
The parameters setParameter, getParameter, getAllParameters and getAllParameterLimits are
implemented in the following RPC objects:
● Device
● Network
● Application
● ImagerConfig
● Filter
setParameter
Method name
Description Sets a parameter to a specific value.
Input parameters 1. Name of parameter:string
Output parameters Empty string (compatibility with classic XmlRPC client)
setParameter
2. New value: string
getParameter
Method name
Description Returns the current value of the parameter.
Input parameters Name of parameter: string
Output parameters Value of parameter: string
getParameter
getAllParameters
Method name
Description Returns all parameters of the object in one data structure.
Input parameters None
Output parameters Struct (name contains the parameter name, value contains the
getAllParameters
stringified parameter value)
getAllParameterLimits
Method name
Description Returns limits of all numeric parameters, that have limits defined on
Input parameters None
Output parameters Struct of Structs (name in first struct is the parameter name,
14
getAllParameterLimits
the device.
substructs contains: min :string, max :string)
E.g.
{"ExposureTime1": { "min": "123", "max": "432" },
"ExposureTime2": { "min": "123", "max": "432" }}
Page 15

3D camera O3X1xx
Parameter string encoding
Non-string parameters must be encoded in the following format.
Type Stringified
bool "true" / "false"
setParameter method also accepts "1"/"0", getter methods must always return
"true"/"false"
int decimal ( e.g "-1234" / "1234" )
Values should be in the range of int32 (-2^31 .. 2^31)
double English floating point notation (optional with exponent)
E.g. "1.2", ".3", "4.5e6", "-7E-8", "-inf", "nan"
Structured types (array or structs) can't be put into parameter storage in an general way. Encoding
of arrays must specified on specific parameters.
6.2 Main Object
getParameter
UK
Method name
Description Getter for the device-global parameters.
Input parameters Name of a device parameter: string
Output parameters Value of the requested parameter: string
getParameter
This is an additional getter outside of edit sessions, so it is possible
to read device information without login.
getAllParameters
Method name
Description Getter for the device-global parameters.
Input parameters none
Output parameters Struct (name contains the parameter name, value contains the
getAllParameters
This is an additional getter outside of edit sessions, so it is possible
to read device information without login.
stringified parameter value)
15
Page 16

3D camera O3X1xx
getSWVersion
Method name
Description Returns version information of all software components.
Input parameters none
Output parameters Struct of strings (e.g. { "IFM_Software": "0.01.07", "Frontend":
getSWVersion
"01.05.02", ... } )
*mandatory keys:
"IFM_Software"
"Linux"
"Main_Application"
"Algorithm_Version"
"Calibration_Version"
"Calibration_Device"
getHWInfo
Method name
Description Returns hardware information of all components.
Input parameters none
Output parameters Struct of strings ( e.g. { "MACAddress": "00:02:01:40:06:C9", ... } )
getHWInfo
*mandatory keys:
"MACAddress"
"Mainboard"
getApplicationList
Method name
Description Delivers basic information of all applications stored on the device.
Input parameters none
Output parameters Array of structs (Index: int, Id: int, Name: string, Description: string)
getApplicationList
16
Page 17

requestSession
3D camera O3X1xx
Method name
Description Requests a session object for access to the configuration and for
Input parameters 1. Password: string
Output parameters Session ID: string
requestSession
changing the device operating mode.
This blocks parallel editing and allows protection of editing with a
password.
The ID could optionally be defined by the external system but it must
be the defined format (32char "hex").
If it is called with only one parameter, the device will generate a
session ID.
The session will start with a default timeout ("SessionTimeout"
device parameter), the timeout can be extended by calling
"heartbeat".
The device will stay in RUN mode.
If password is disabled on the device, the value given as password
parameter is ignored.
2. Session ID: string
reboot
UK
Method name
Description Reboot system, parameter defines which mode/system will be
Input parameters Type of system that should be booted after shutdown: int
Output parameters Empty string (compatibility with classic XmlRPC-client)
reboot
booted.
0: Productive mode
1: Recovery mode
systemCommand
Method name
Description Performs a generic command on the device.
Input parameters 1. Command: string
Output parameters string
systemCommand
2. Parameter: string
getTraceLogs
Method name
Description Returns entries from the internal log buffer of the device. It can
Input parameters nLogs (Integer): max. number of logs to fetch from the IO manager.
Output parameters logs (Array of Strings): trace logs
getTraceLogs
contain informal, error or trace messages.
If the value is 0, all logs are fetched.
17
Page 18

3D camera O3X1xx
getClientCompatibilityList
Method name
Description The device must be able to define which type and version of
Input parameters none
Output parameters Array of strings:
getClientCompatibilityList
operating program is compatible.
● Each string contains: "[VendorID]-[OperatingProgramID],[major].
[minor]" (IDs are 4 digit-hex, version dec).
● Each field could be a wildcard with '*'.
● E.g. "0001-0001,1.0" or "0001-*,1.*".
getUnitVectors
Method name
Description Returns a chunk containing the current unit vectors.
Input parameters none
Output parameters Unit vector chunk: binary/base64
getUnitVectors
Trigger
Method name
Description Executes a software trigger. The trigger might be delayed in order
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
trigger
to fulfill the pause time or maximum frame rate requirements. This
delay takes place synchronously, i.e. this RPC returns after the
trigger has been executed.
18
Page 19

6.3 Session Object
heartbeat
3D camera O3X1xx
Method name
Description Extends the life time of the edit session.
Input parameters Requested timeout interval till next heartbeat, in seconds: int
Output parameters The used timeout interval, in seconds: int
heartbeat
If the given value is outside the range of "SessionTimeout", the
saved default timeout will be used.
cancelSession
Method name
Description Explicit stop of this session.
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
cancelSession
If an import or export is still being processed, the session is kept
alive until the import or export has finished, although the method
returns immediately.
exportCong
Method name
Description Exports the whole configuration of the sensor device.
Input parameters none
Output parameters Configuration as a data BLOB: binary/base64
exportConfig
UK
importCong
Method name
Description Imports whole configuration with the option to skip specific parts.
Input parameters 1. Configuration as a data BLOB: binary/base64
Output parameters Empty string (compatibility with classic XmlRPC-client)
importConfig
2. Flags describing which parts should be loaded:
0x0001: Includes configuration (Name, Description, Location, ...)
0x0002: Includes network configuration (IP, DHCP, ...)
0x0010: Includes all application configurations
exportApplication
Method name
Description Exports one application config.
Input parameters Application index
Output parameters Application config as a data BLOB: binary/base64
exportApplication
19
Page 20

3D camera O3X1xx
importApplication
Method name
Description Imports an application config and creates a new application with it.
Input parameters Application config as one data BLOB: binary/base64
Output parameters Index of new application
importApplication
The name of the application should be based on the one stored in
the exported config.
If the name should be unique, the sensor must generate a suffix in
case of a naming conflict.
The device will get a new ID. If the config data contains a ID, it must
be ignored.
The device will put the new application on the first free index.
setOperatingMode
Method name
Description Changes the operating mode of the device.
Input parameters Mode: integer
Output parameters Empty string (compatibility with classic XmlRPC-client)
setOperatingMode
Setting this to "edit" will enable the "edit mode object” on RPC.
0: Run mode
1: Edit mode
The device will not distinguish between edit and run mode. The application will always behave as in
run mode. As soon as a session is opened the application can immediately be edited.
After successfully calling "requestSession" the application object at URL
"/api/rpc/v1/com.ifm.efector/session_d21c80db5bc1069932fbb9a3bd841d0b/edit/application/"
is immediately available.
20
Page 21

3D camera O3X1xx
6.4 Edit Mode Object
The device will not distinguish between edit and run mode. The application will always behave as in
run mode. As soon as a session is opened the application can immediately be edited.
factoryReset
Method name
Description Resets all configurations to factory settings
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
factoryReset
changeNameAndDescription
Method name
Description Changes the name and the description of the application.
Input parameters 1. Application index :int
Output parameters Empty string (compatibility with classic XmlRPC-client)
changeNameAndDescription
2. New name of the application: string (utf8, max. 64 character)
3. New description of the application: string (utf8, max. 500 character)
6.5 Device Config Object
activatePassword
Method name
Description Sets a password and activates it for the next edit session.
Input parameters Password: string
Output parameters Empty string (compatibility with classic XmlRPC-client)
activatePassword
Making this change persistently requires to call "save" on device
config.
UK
disablePassword
Method name
Description Disables the password protection.
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
disablePassword
Making this change persistently requires to call "save" on device
config.
save
Method name
Description Stores current configuration in persistent memory.
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
save
If this is not called after changing device parameters (via
setParameter), changes will get lost on reboot.
21
Page 22

3D camera O3X1xx
Parameters of Device Cong
Methods for parameter access are defined here:
Parameter name Data type Description
Name String (utf8) User-defined name of the device (max. 64 characters).
Description String (utf8) User-defined description of the device
(max. 500 characters).
SessionTimeout Int
*has limits
IPAddressConfig Int readonly: The ifm Vision Assistant requires to know
Number of seconds which a session stays before a call
to "heartbeat" method is needed.
if the device is on a discovery IP address for multiple
use cases. This information was extended to reflect all
kinds of IP-address situations.
Allowed values:
0: Static (IP address explicitly defined inside the
device)
1: DHCP (using a DHCP server in the network)
2: LinkLocal (configured to DHCP, but no server which
provided an address)
3: Discovery (changed by IP4Discovery mechanism)
PasswordActivated Bool readonly: Is true if the password protection is enabled.
OperatingMode Int readonly: Mode of device (RUN, EDIT)
Always returns 0 ("run mode"). Parameter is present
for compatibility reasons.
DeviceType String readonly: Delivers a type description, unique by
imager, evaluation logic and device interface.
ArticleNumber String readonly: Official catalogue number.
ArticleStatus String readonly: Official two-letter status code.
UpTime Double readonly: Hours since last reboot.
ImageTimestampReference Int
Unit: seconds
TemperatureIllu Double
Unit: celsius
*has limits: parameters with this marker are listed in the reply of getAllParameterLimits method.
readonly: The timestamp is the current system time
(UTC) in seconds since 1.1.1970.
readonly: Temperature measured in the device.
22
Page 23

Default values of Device Cong parameters
The default values of the device configuration parameters are:
Parameter name Data type Default value
Name String (utf8) "New sensor"
Description String (utf8) ""
SessionTimeout Int
*has limits
IPAddressConfig Int 0
PasswordActivated Bool false
OperatingMode Int 0
For all other device config parameters there are no defined default values, because they
are either device-dependent (DeviceType, ArticleNumber, ArticleStatus) or volatile (UpTime,
ImageTimestampReference).
30
Minimum and maximum values of Device Cong parameters
The minimum and maximum values of the device configuration parameters are:
3D camera O3X1xx
UK
Parameter name Minimum value Maximum value
SessionTimeout 5 300
6.6 Device/Network Config Object
saveAndActivateCong
Method name
Description Reinitialise the network interface so that it uses the configuration
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
saveAndActivateConfig
which was set by the other RPC methods.
There will be no XMLRPC reply, because the network interface is
instantly reset.
Parameters of Device/Network Cong
Methods for parameter access are defined here:
Parameter name Data type Description
StaticIPv4Address String (utf8) IPv4 address of the device. Only used if DHCP is
disabled and if there is no temporary IP address set
via discovery.
Only numeric IPv4 addresses in quad-dotted notation
are allowed (e.g. "192.168.0.69")
StaticIPv4SubNetMask String (utf8) IPv4 network mask of the device.
Only numeric IPv4 addresses in quad-dotted notation
are allowed (e.g. "255.255.255.0").
StaticIPv4Gateway String (utf8) IPv4 gateway of the device.
Only numeric IPv4 addresses in quad-dotted notation
are allowed (e.g. "192.168.0.69").
UseDHCP Bool Selects whether the network should be configured via
DHCP.
23
Page 24

3D camera O3X1xx
Parameter name Data type Description
MACAddress String Read only: MAC-Address of the device
(format: "xx:xx:xx:xx:xx:xx").
Default values of Device/Network Cong parameters
The default values of the Device/Network configuration parameters are:
Parameter name Data type Default value
StaticIPv4Address String (utf8) 192.168.0.69
StaticIPv4SubNetMask String (utf8) 255.255.255.0
StaticIPv4Gateway String (utf8) 192.168.0.201
UseDHCP Bool false
MACAddress String -
The parameter "MACAdress" has no defined default values, because they are device-dependent.
6.7 Time Config Object
setCurrentTime
Method name
Description Sets the current system time.
Input parameters Timestamp: int (UTC, seconds since 1.1.1970)
Output parameters Empty string (compatibility with classic XmlRPC-client)
setCurrentTime
saveAndActivateCong
Method name
Description Save and immediately apply the current time configuration (might
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
saveAndActivateConfig
lead to jump in the system time).
Parameters of Time Cong
Methods for parameter access are defined here:
Parameter name Data type Description
NTPServers String (utf8) List of NTP servers which should be used for system
time synchronization.
The server entries have to be separated with
commas and/or whitespaces. Each server entry
must be a numeric IPv4 address in dot notation (e.g.
"192.168.0.69").
WaitSyncTries Int Number of attempts to initially synchronize with a
NTP server. Each attempt waits 10 seconds for a
server response.
SynchronizationActivated Bool Enables synchronization of system time via NTP.
StartingSynchronization Bool Read only: Returns "true" during the initial NTP
synchronization, which may result in a jump in the
system time. Returns "false" afterwards.
24
Page 25

3D camera O3X1xx
Parameter name Data type Description
Syncing Bool Read only: Returns "true" if the system time is
synchronized to a NTP server (i.e. if at least one of
the three most recent synchronization attempts was
successful).
CurrentTime Int Read only: Returns the current system time (UTC,
seconds since 1.1.1970).
Stats String Read only: Returns a human readable string containg
the synchronization state and accuracy for all
NTP servers.
Default values of Time Cong parameters
The default values of the time configuration parameters are:
Parameter name Data type Default value
WaitSyncTries Int 2
SynchronizationActivated Bool false
For all other device config parameters there are no defined default values, because they
are either device-dependent (DeviceType, ArticleNumber, ArticleStatus) or volatile (UpTime,
ImageTimestampReference).
UK
Minimum and maximum values of Time Cong parameters
The minimum and maximum values of the time configuration parameters are:
Parameter name Minimum value Maximum value
WaitSyncTries 1 6
6.8 Application Config Object
save
Method name
Description Stores current configuration in persistent memory.
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
save
This is also be possible if the application is not yet in an "activatable"
status.
Validate
Method name
Description Validates the application. This means it checks if the application can
Input parameters none
Output parameters Array of fault structs (Id: int, Text: string)
Fault scenarios none
validate
be activated.
The device should do this check, while activating an application.
forceTrigger
Method name
Description Executes a software trigger of currently active application.
Input parameters none
forceTrigger
25
Page 26

3D camera O3X1xx
Output parameters Empty string (compatibility with classic XmlRPC-client)
discardUnsavedChanges
Method name
Description Resets all changed parameters of the application object and all child
Input parameters none
Output parameters Empty string (compatibility with classic XmlRPC-client)
discardUnsavedChanges
objects to their persistent values, i.e. the values at the time when
"save" has been called last or when the session has been opened.
Parameters of application
Methods for parameter access are defined here:
Parameter name Data type Description
Name String (utf8) User-defined name of the application
(max. 64 characters).
Description String (utf8) User-defined description of the application
(max. 500 characters).
TriggerMode Int
*has limits
OutputDistanceImage Bool Output the radial distance image.
OutputAmplitudeImage Bool Output the amplitude image.
OutputGrayscaleImage Bool Output the grayscale image if supported by the selected
OutputConfidenceImage Bool Output the confidence image.
OutputXYZImage Bool Output the point cloud image.
Selects how images are generated in the application.
Allowed values:
1: free run
2: software trigger
exposure mode. See the description of the exposure
modes whether a particular mode also provides a
grayscale image.
*has limits: parameters with this marker are listed in the reply of getAllParameterLimits method
Default values of application parameters
The default values of application parameters are:
Parameter name Data type Default value
Name String (utf8) "new application"
Description String (utf8) ""
TriggerMode Int
*has limits
OutputDistanceImage Bool true
OutputAmplitudeImage Bool true
OutputGrayscaleImage Bool false
OutputConfidenceImage Bool false
OutputXYZImage Bool false
1
26
Page 27

3D camera O3X1xx
Minimum and maximum values of application parameters
The minimum and maximum values of application parameters are:
Parameter name Minimum value Maximum value
TriggerMode 1 2
6.9 Application/Imager Config Object
changeType
Method name
Description Changes the type of imager configuration.
Input parameters String
Output parameters Empty string (compatibility with classic XmlRPC-client)
changeType
This changes setting of available parameters and might also change
available RPC methods.
availableTypes
Method name
Description Lists all available imager configuration types.
Input parameters none
Output parameters Array of strings
availableTypes
Parameters of all types of application imager cong
Methods for parameter access are defined here:
Parameter name Data type Description
FrameRate Double
*has limits
ExposureTime Int
Target frame rate in frames per second for free run mode.
Exposure time in microseconds.
UK
*has limits
SpatialFilterType Int
*has limits
TemporalFilterType Int
*has limits
MinimumAmplitude Double
*has limits
SymmetryThreshold Double
*has limits
Type String Read only: Type of imager configuration, see changeType
MaxAllowedFrameRate Double Read only: maximum allowed frame rate for the current
*has limits: parameters with this marker are listed in the reply of getAllParameterLimits method
A filter for amplitude and distance images. Allowed values:
0: off
1: 3x3 median filter
A filter for consecutive amplitude and distance images.
Allowed values:
0: off
1: adaptive exponential filter
Minimum amplitude.
Symmetry threshold.
Method. For available exposure modes see (→ 6.10).
application parameters.
27
Page 28

3D camera O3X1xx
Default values of common imager cong parameters
The default values of the common imager configuration parameters are:
Parameter name Data type Default value
FrameRate Double 5.0
ExposureTime Int 1000
SpatialFilterType Int 0
TemporalFilterType Int 0
MinimumAmplitude Double 42
SymmetryThreshold Double 0.4
Minimum and maximum values of common imager cong parameters
The minimum and maximum values of common imager configuration parameters are:
Parameter name Minimum value Maximum value
FrameRate 0.0167 30
ExposureTime depends on exposure mode depends on exposure mode
SpatialFilterType 0 1
TemporalFilterType 0 1
MinimumAmplitude 0 10000
SymmetryThreshold 0 1000
Parameters only in double exposure modes of application imager cong
Parameter name Data type Description
ExposureTimeRatio Double
*has limits
Ratio of long exposure time to short exposure time. Only
available in double exposure modes.
Default values of double exposure mode parameters
Parameter name Data type Default value
ExposureTimeRatio Double 40
Minimum and maximum values of double exposure mode parameters
Parameter name Minimum value Maximum value
ExposureTimeRatio 2 50
Parameters only in exposure modes with grayscale image of application imager
cong
Parameter name Data type Description
ExposureTimeGrayscale Int
*has limits
Exposure time in microseconds for the grayscale image.
Only available in exposure modes with grayscale image.
Default values of exposure mode parameters with grayscale image
Parameter name Data type Default value
ExposureTimeGrayscale Int 1000
Minimum and maximum values of exposure mode parameters with
grayscale image
Parameter name Minimum value Maximum value
ExposureTimeGrayscale 1 5000
28
Page 29

6.10 Exposure modes
The following exposure modes are available:
● upTo02m_low
● upTo02m_moderate
● upTo03m_low
● upTo03m_moderate
● upTo07m_low
3D camera O3X1xx
● upTo07m_moderate
● upTo15m_low
● upTo15m_moderate
● upTo30m_low
● upTo30m_moderate
The capture mode consists of:
Section Description
upTo30m_
_moderate ● 2 exposure times
_low ● 1 exposure time
The capture mode "upTo30m_moderate" is preset.
● Length of the unambiguous range
● 1 measurement frequency: unambiguous range < "7m"
● 2 measurement frequencies: unambiguous range >= "7m"
UK
29
 Loading...
Loading...