

IFIROBOTICS Victor 884 User Manual
r
r
IFIROBOTICS
12V Victor 884
25 Sept 06 www.IFIrobotics.com Users Manual - Page 1
The Victor speed controllers are specifically engineered
for robotic applications. The high current capacity, low
voltage drop, and peak surge capacity make the Victor
ideal for drive systems while its braking options and
precise control meet the demanding needs of arms and
lift systems. This controller safely handles the high
continuous current draws and extreme current surges
produced by Competition robots. The innovative FET
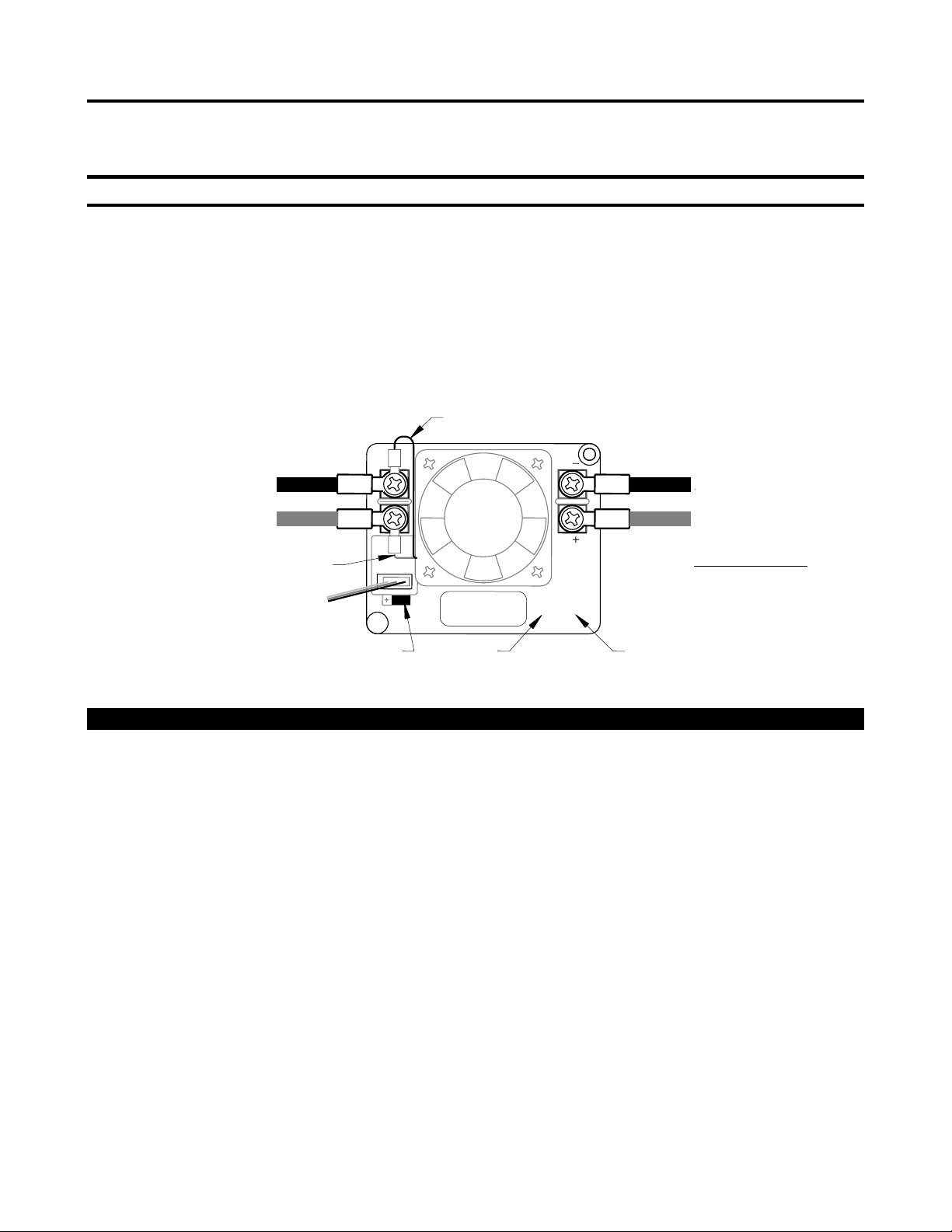
TO BATTERY GND
BLK
TO BATTERY 12V
RED
Fan 12V (RED)
PWM EXTENSION CABLE
TO RECEIVER PWM
GND
12
W BR
CB
Innovation First
Fan GND (BLK)
VICTOR 884
switching architecture and an integral cooling fan
ensures cool FET junction temperatures. The low
voltage drop and high switching speed ensures the motor
receives maximum power, providing significant
improvements in acceleration, direction changes, and
lifting torque. The LED indicator will be GREEN in
‘full-forward’ condition, RED in ‘full-reverse’ and
ORANGE while in neutral.
M
M
BLK
TO MOTOR and
TO MOTOR
30A BREAKER
RED
LED Indicator Status
• Green = Full Forward
• Orange = Neutral / Brake
• Red = Full Reverse
• Flashing Orange = no PWM
Cal Button
Wiring Guidelines
1. The fan must be wired so it is always ON when the
Victor is ON.
2. Attach the fan wires and connect to the appropriate
voltage.
3. The input and output wires should be 10AWG wire
minimum and firmly connected to ensure low
voltage drop and minimal temperature rise.
4. Use circle lugs designed for your wire size. The lug
should have a hole designed for a #6 or #8 screw. If
the center hole is too large, (#10 or larger)
inadequate mechanical contact may result in
excessively high resistance and temperature rise.
5. Check all lug connection after crimping and
soldering. You should not be able to pull the lug off
the wire with your hands.
LED Indicato
the Victor. This will ensure the wires do not move
and loosen the connections.
WARNING: BEFORE APPLYING POWER:
1. Ensure the input connections are not reversed.
Connecting 12V and GND backwards will
destroy the unit.
2. Ensure that there is not a short circuit on the
output. A short circuit will destroy the unit.
3. Ensure there is a circuit breaker either inline
with the 12V power input to the speed controller,
or inline with the motor. Use an appropriate
circuit breaker for your application to ensure
that long term exposure to a stalled motor (high
currents) will not overheat the Victor.
Brake/Coast Jumpe
6. Once the input and output wires are firmly
connected, tie the wires using tie straps within 2 ” of
IFIROBOTICS
12V Victor 88
25 Sept 06 www.IFIrobotics.com Users Manual - Page 2
PWM Connection
You will need (1) PWM extension cable or PWM Signal
Driver.
1. Use a PWM Signal Driver to ensure the signal from
your receiver is Victor compatible if you are not
using an IFI Control System.
2. The male PWM cable connector connects to the
speed controller. The Victor housing is design to
provide a firm connection. Trim the shroud corners
slightly if necessary for insertion into the Victor.
3. The PWM extension cable should be installed with
the black wire towards the fan.
4. Standard Radio Controlled PWM connectors are
fragile. Use caution when inserting and removing
the PWM cable so the contacts on both connectors
are not damaged.
Mounting Guidelines
You will need (2) #4 or #6 screws.
1. The Victor can be installed in any orientation.
2. The speed controller must have adequate space
above the fan for airflow, a minimum of 2 inches.
3. Do not over-tighten the mounting screws through
the speed controller. A snug connection will hold
the speed controller in place without crushing the
case.
Calibration Instructions
The Victor is pre-calibrated to values compatible with an
IFI Control System and re-calibration is not needed.
You can re-calibrate to achieve ‘full forward/reverse’
from your joystick movement if necessary.
NOTE: While in calibration mode, the Victor will
record the max PWM value detected as ‘full forward’,
the min PWM value as ‘full reverse’, and ‘neutral’ will
be the PWM value recorded at the release of the Cal
button. The following steps will guide.
User Calibration:
1. Power ON the speed controller.
2. Press and hold the Cal button. After a moment, the
LED indicator on the Victor will begin alternating
between RED and GREEN to indicate a cal mode.
3. While continuing to hold the Cal button, move the
joystick to the maximum and minimum positions.
This can be done in any order and as many times as
desired.
4. While continuing to hold the Cal button, return the
joystick to center (neutral position).
5. Release the Cal button.
6. A flashing GREEN indicator confirms a successful
calibration.
7. A flashing RED indicator denotes an unsuccessful
calibration.
An unsuccessful calibration occurs when either:
a) Insufficient joystick travel was detected in forward
and/or reverse.
b) Th e trim tab is too far fro m center.
Resetting Calibration to Factory Pre-calibration:
1. Power OFF the speed controller.
2. Press and hold the Cal button.
3. While continuing to hold the Cal button, Power ON
the speed controller.
4. A flashing GREEN indicator denotes calibration is
reset. Release the Cal button.
Brake / Coast Configuration
The Brake / Coast jumper is used to set the speed
controller’s action during a neutral condition. The Brake
provides significant resistance to motor rotation and is
recommended for motors driving linkages and arms that
can be back-driven by gravity or other external forces.
The speed controller checks the status of the jumper
approximately 60 times per second. This allows the user
to change from brake to coast during operation. A limit
switch may be connected to the jumper connector instead
of the jumper. The limit switch can be triggered by
various means including the use of a servo.
Brake / Coast Guidelines
1. The jumper should always be installed. If you lose
the jumper, a standard computer jumper will work.
2. The Coast condition (Jumper on Inner two Pins) sets
the output to an open circuit during neutral.
3. The Brake condition (Jumper on Outer two pins)
sets the output to a short across the motor leads
during neutral.
: Reference Diagram
 Loading...
Loading...