

Page 1
查询IC41C44002A供应商
IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
Document Title
4Mx4 bit Dynamic RAM with EDO Page Mode
Revision History
Revision No History Draft Date Remark
0A Initial Draft September 4,2001
The attached datasheets are provided by ICSI. Integrated Circuit Solution Inc reserve the right to change the specifications and
products. ICSI will answer to your questions about device. If you have any questions, please contact the ICSI offices.
Integrated Circuit Solution Inc. 1
DR026-0A 09/04/2001
Page 2
IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
4M x 4 (16-MBIT) DYNAMIC RAM
WITH EDO PAGE MODE
FEATURES
• Extended Data-Out (EDO) Page Mode
access cycle
• TTL compatible inputs and outputs
• Refresh Interval:
-- 2,048 cycles/32 ms
• Refresh Mode: RAS-Only,
CAS-before-RAS (CBR), and Hidden
• JEDEC standard pinout
• Single power supply:
5V ± 10% or 3.3V ± 10%
• Self Refresh 2048 cycles for S version
• Low power for L version.
PRODUCT SERIES OVERVIEW
Part No. Refresh Voltage
IS41C44002A 2K 5V ± 10%
IS41C44002AS(L) 2K 5V ± 10%
IS41LV44002A 2K 3.3V ± 10%
IS41LV44002AS(L) 2K 3.3V ± 10%
DESCRIPTION
The ICSI 44002 Series is a 4,194,304 x 4-bit high-performance
CMOS Dynamic Random Access Memory. These devices
offer an accelerated cycle access called EDO Page Mode.
EDO Page Mode allows 2,048 random accesses within a single
row with access cycle time as short as 20 ns per 4-bit word.
These features make the 44002 Series ideally suited for highbandwidth graphics, digital signal processing, high-performance
computing systems, and peripheral applications.
The 44002 Series is packaged in a 24-pin 300mil SOJ and a 24
pin TSOP-2
KEY TIMING PARAMETERS
Parameter -50 -60 Unit
RAS Access Time (tRAC)5060ns
CAS Access Time (tCAC)1315ns
Column Address Access Time (tAA)2530ns
EDO Page Mode Cycle Time (tPC)2025ns
Read/Write Cycle Time (tRC) 84 104 ns
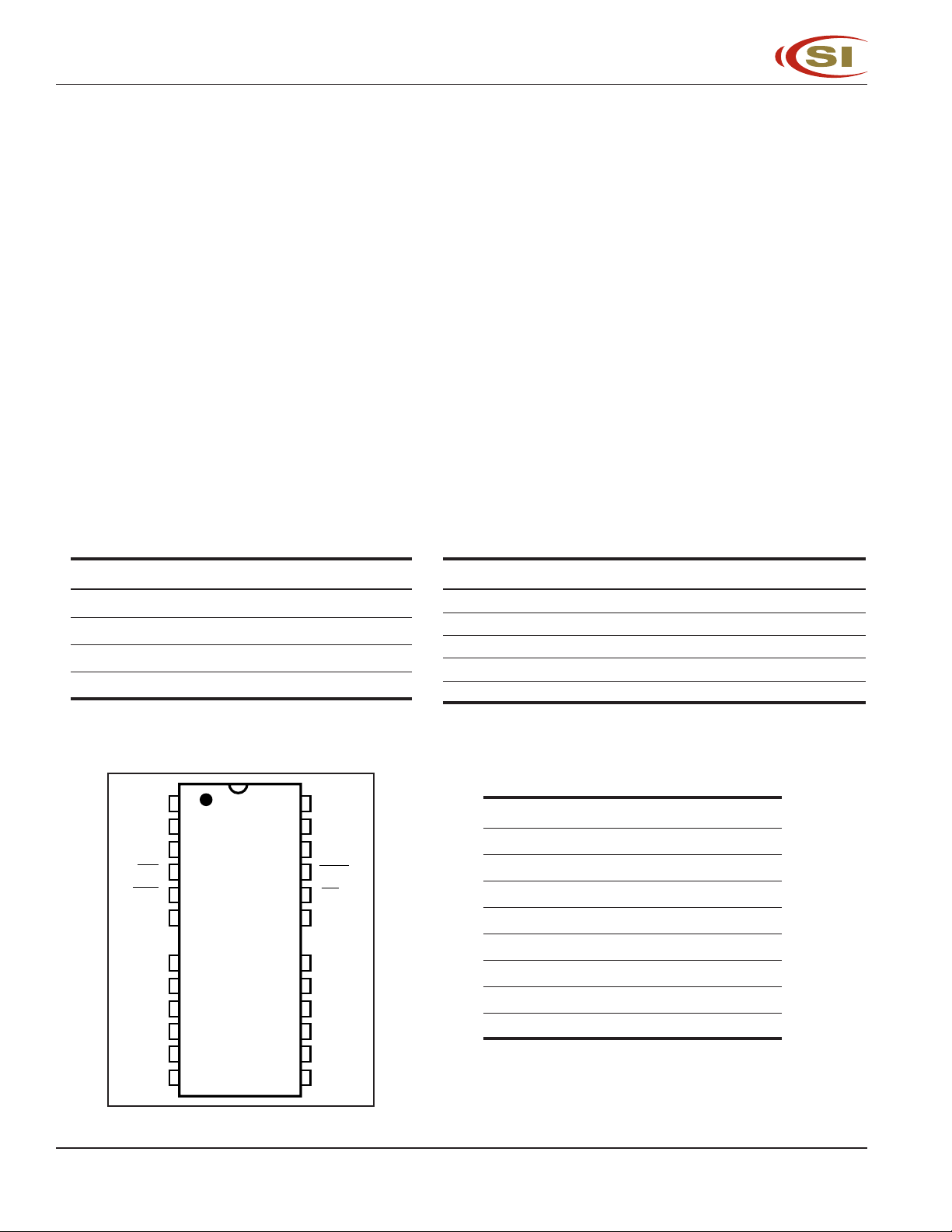
PIN CONFIGURATION
24 Pin SOJ, TSOP-2
PIN DESCRIPTIONS
24
23
22
21
20
19
18
17
16
15
14
13
GND
I/O3
I/O2
CAS
OE
A9
A8
A7
A6
A5
A4
GND
A0-A10 Address Inputs (2K Refresh)
I/O0-3 Data Inputs/Outputs
WE Write Enable
OE Output Enable
RAS Row Address Strobe
CAS Column Address Strobe
Vcc Power
GND Ground
NC No Connection
DR026-0A 09/04/2001
A0
A1
A2
A3
1
2
3
4
5
6
7
8
9
10
11
12
VCC
I/O0
I/O1
WE
RAS
NC
A10
VCC
ICSI reserves the right to make changes to its products at any time without notice in order to improve design and supply the best possible product. We assume no responsibility for any errors
which may appear in this publication. © Copyright 2000, Integrated Circuit Solution Inc.
2 Integrated Circuit Solution Inc.
Page 3
IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
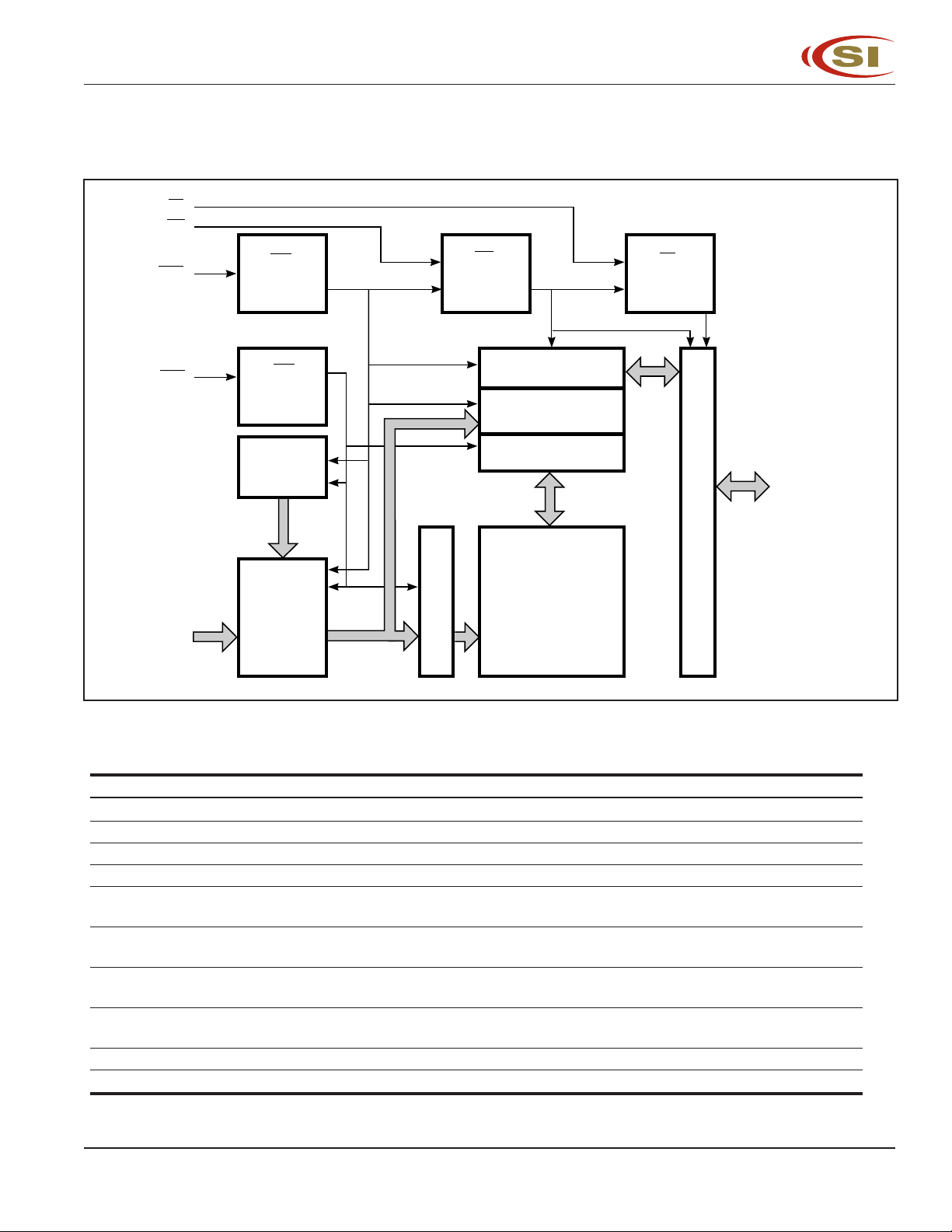
FUNCTIONAL BLOCK DIAGRAM
OE
WE
CAS
RAS
A0-A10
CAS
CONTROL
LOGIC
RAS
CLOCK
GENERATOR
REFRESH
COUNTER
ADDRESS
BUFFERS
WE
CAS WE
RAS
CONTROL
LOGICS
DATA I/O BUS
COLUMN DECODERS
SENSE AMPLIFIERS
MEMORY ARRAY
4,194,304 x 4
ROW DECODER
OE
CONTROL
LOGIC
OE
I/O0-I/O3
DATA I/O BUFFERS
TRUTH TABLE
Function
RASRAS
RAS
RASRAS
Standby H H X X X High-Z
Read L L H L ROW/COL DOUT
Write: Word (Early Write) L L L X ROW/COL DIN
Read-Write L L H→LL→H ROW/COL DOUT, DIN
EDO Page-Mode Read 1st Cycle: L H→L H L ROW/COL DOUT
2nd Cycle: L H→L H L NA/COL DOUT
EDO Page-Mode Write 1st Cycle: L H→L L X ROW/COL DIN
2nd Cycle: L H→L L X NA/COL DIN
EDO Page-Mode 1st Cycle: L H→LH→LL→H ROW/COL DOUT, DIN
Read-Write 2nd Cycle: L H→LH→LL→H NA/COL DOUT, DIN
Hidden Refresh Read L→H→L L H L ROW/COL DOUT
(1)
Write
L→H→L L L X ROW/COL DIN
RAS-Only Refresh L H X X ROW/NA High-Z
CBR Refresh H→L L H X X High-Z
Note:
1. EARLY WRITE only.
Integrated Circuit Solution Inc. 3
DR026-0A 09/04/2001
CASCAS
CAS
CASCAS
WEWE
WE
WEWE
OEOE
OE Address tR/tC I/O
OEOE
Page 4

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
Functional Description
The IC41C44002A and IC41LV44002A are CMOS DRAMs
optimized for high-speed bandwidth, low power
applications. During READ or WRITE cycles, each bit is
uniquely addressed through the 11 address bits. These are
entered 11 bits (A0-A10) at a time for the 2K refresh device
. The row address is latched by the Row Address Strobe
(RAS). The column address is latched by the Column
Address Strobe (CAS). RAS is used to latch the first 11 bits
and CAS is used to latch the latter 11 bits.
Memory Cycle
A memory cycle is initiated by bring RAS LOW and it is
terminated by returning both RAS and CAS HIGH. To
ensures proper device operation and data integrity any
memory cycle, once initiated, must not be ended or
aborted before the minimum tRAS time has expired. A new
cycle must not be initiated until the minimum precharge
time tRP, tCP has elapsed.
Read Cycle
A read cycle is initiated by the falling edge of CAS or OE,
whichever occurs last, while holding WE HIGH. The
column address must be held for a minimum time specified
by tAR. Data Out becomes valid only when tRAC, tAA, tCAC
and tOE are all satisfied. As a result, the access time is
dependent on the timing relationships between these
parameters.
Write Cycle
A write cycle is initiated by the falling edge of CAS and WE,
whichever occurs last. The input data must be valid at or
before the falling edge of CAS or WE, whichever occurs
last.
Refresh Cycle
To retain data, 2,048 refresh cycles are required in each
32 ms period. There are two ways to refresh the memory:
1. By clocking each of the 2,048 row addresses (A0
through A10) with RAS at least once every 32 ms. Any
read, write, read-modify-write or RAS-only cycle refreshes the addressed row.
2. Using a CAS-before-RAS refresh cycle. CAS-beforeRAS refresh is activated by the falling edge of RAS,
while holding CAS LOW. In CAS-before-RAS refresh
cycle, an internal 11-bit counter provides the row addresses and the external address inputs are ignored.
CAS-before-RAS is a refresh-only mode and no data
access or device selection is allowed. Thus, the output
remains in the High-Z state during the cycle.
Self Refresh Cycle
The Self Refresh allows the user a dynamic refresh, data
retention mode at the extended refresh period of 64 ms. i.
e., 32 µs per row when using distributed CBR refreshes.
The feature also allows the user the choice of a fully static,
low power data retention mode. The optional Self Refresh
feature is initiated by performing a CBR Refresh cycle and
holding RAS LOW for the specified tRASS.
The Self Refresh mode is terminated by driving RAS HIGH
for a minimum time of tRPS. This delay allows for the
completion of any internal refresh cycles that may be in
process at the time of the RAS LOW-to-HIGH transition. If
the DRAM controller uses a distributed refresh sequence,
a burst refresh is not required upon exiting Self Refresh.
However, if the DRAM controller utilizes a RAS-only or
burst refresh sequence, all 2048 rows must be refreshed
within the average internal refresh rate, prior to the resumption of normal operation.
(1)
Power-On
After application of the VCC supply, an initial pause of
200 µs is required followed by a minimum of eight initialization cycles (any combination of cycles containing a
RAS signal).
During power-on, it is recommended that RAS track with
VCC or be held at a valid VIH to avoid current surges.
Note:
1.Self Refresh is for S version only.
4 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 5
IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
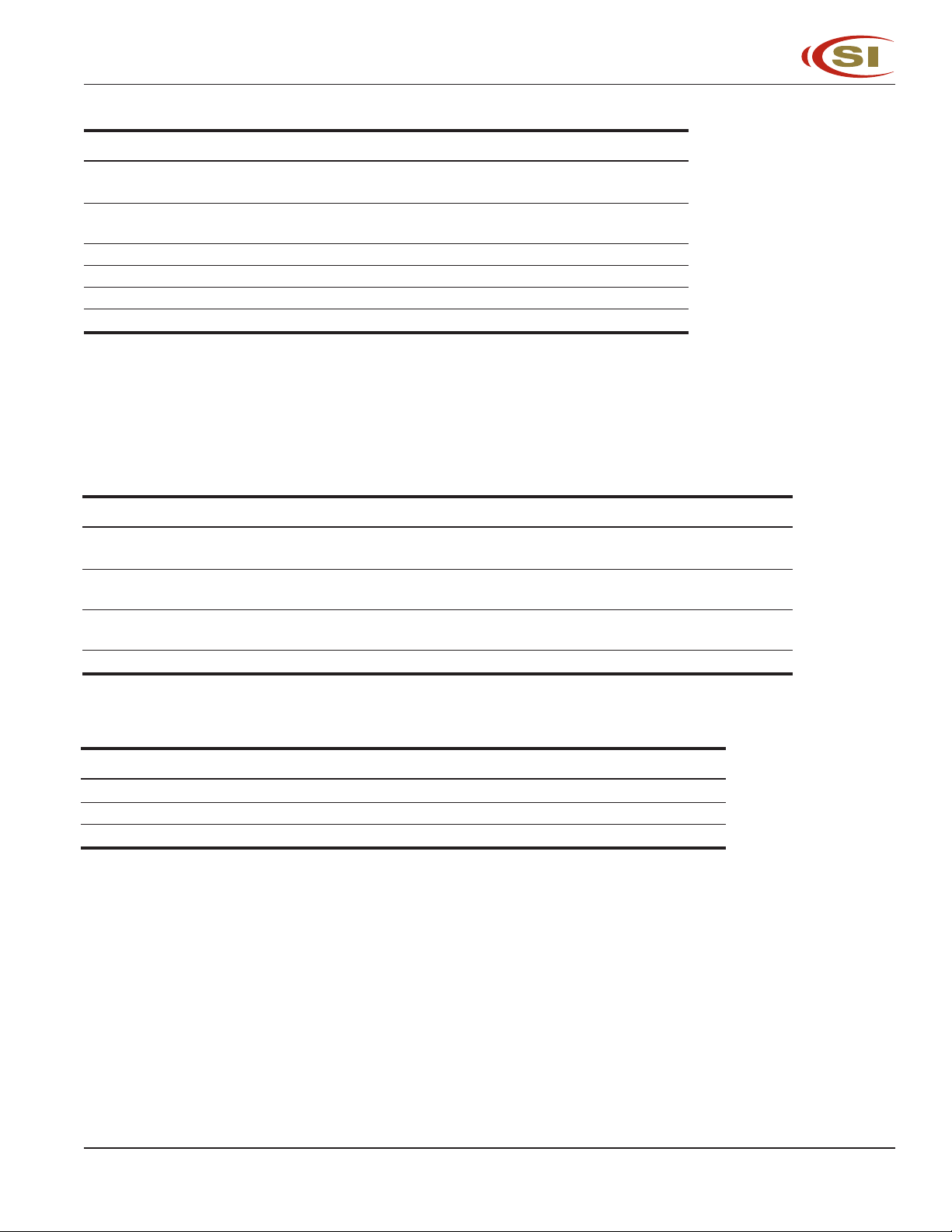
ABSOLUTE MAXIMUM RATINGS
(1)
Symbol Parameters Rating Unit
V
T Voltage on Any Pin Relative to GND 5V −1.0 to +7.0 V
3.3V −0.5 to +4.6
CC Supply Voltage 5V −1.0 to +7.0 V
V
3.3V −0.5 to +4.6
IOUT Output Current 50 mA
PD Power Dissipation 1 W
TA Commercial Operation Temperature 0 to +70
o
C
TSTG Storage Temperature −55 to +125oC
Note:
1. Stress greater than those listed under ABSOLUTE MAXIMUM RATINGS may cause permanent
damage to the device. This is a stress rating only and functional operation of the device at these
or any other conditions above those indicated in the operational sections of this specification is
not implied. Exposure to absolute maximum rating conditions for extended periods may affect
reliability.
RECOMMENDED OPERATING CONDITIONS (Voltages are referenced to GND.)
Symbol Parameter Min. Typ. Max. Unit
VCC Supply Voltage 5V 4.5 5.0 5.5 V
3.3V 3.0 3.3 3.6
VIH Input High Voltage 5V 2.4 − VCC + 1.0 V
3.3V 2.0 − VCC + 0.3
VIL Input Low Voltage 5V −1.0 − 0.8 V
3.3V −0.3 − 0.8
TA Commercial Ambient Temperature 0 − 70
o
C
CAPACITANCE
(1,2)
Symbol Parameter Max. Unit
CIN1 Input Capacitance: A0-A10(A11) 5 pF
CIN2 Input Capacitance: RAS, CAS, WE, OE 7pF
CIO Data Input/Output Capacitance: I/O0-I/O3 7 pF
Notes:
1. Tested initially and after any design or process changes that may affect these parameters.
2. Test conditions: TA = 25oC, f = 1 MHz.
Integrated Circuit Solution Inc. 5
DR026-0A 09/04/2001
Page 6
IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
ELECTRICAL CHARACTERISTICS
(1)
(Recommended Operating Conditions unless otherwise noted.)
Symbol Parameter Test Condition Speed Min. Max. Unit
I
IL Input Leakage Current Any input 0V ≤ VIN ≤ Vcc −55µA
Other inputs not under test = 0V
IIO Output Leakage Current Output is disabled (Hi-Z) −55µA
0V ≤ VOUT ≤ Vcc
VOH Output High Voltage Level IOH = −5.0 mA with VCC=5V 2.4 − V
IOH = −2.0 mA with VCC=3.3V
VOL Output Low Voltage Level IOL = 4.2 mA with VCC=5V − 0.4 V
IOL = 2 mA with VCC=3.3V
ICC1 Standby Current: TTL RAS, CAS ≥ VIH 5V − 2mA
3.3V − 2
ICC2 Standby Current: CMOS RAS, CAS ≥ VCC − 0.2V 5V − 1mA
3.3V − 0.5
ICC3 Operating Current: RAS, CAS, -50 − 120 mA
Random Read/Write
(2,3,4)
Address Cycling, tRC = tRC (min.) -60 − 110
Average Power Supply Current
ICC4 Operating Current: RAS = VIL, CAS, -50 − 90 mA
EDO Page Mode
(2,3,4)
Cycling tPC = tPC (min.) -60 − 80
Average Power Supply Current
ICC5 Refresh Current: RAS, CAS Cycling -50 − 120 mA
(2,3,5)
CBR
tRC = tRC (min.) -6 0 − 110
Average Power Supply Current
ICCS Self Refresh current
(6)
Self Refresh Mode 5V,nromal version 500 µA
5V, L version 350
3.3V, normal version 450
3.3, L version 350
Notes:
1. An initial pause of 200 µs is required after power-up followed by eight RAS refresh cycles (RAS-Only or CBR) before proper device
operation is assured. The eight RAS cycles wake-up should be repeated any time the tREF refresh requirement is exceeded.
2. Dependent on cycle rates.
3. Specified values are obtained with minimum cycle time and the output open.
4. Column-address is changed once each EDO page cycle.
5. Enables on-chip refresh and address counters.
CCS is for S version only.
6. I
6 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 7

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
AC CHARACTERISTICS
(1,2,3,4,5,6)
(Recommended Operating Conditions unless otherwise noted.)
-50 -60
Symbol Parameter Min. Max. Min. Max. Units
tRC Random READ or WRITE Cycle Time 84 − 104 − ns
tRAC Access Time from RAS
tCAC Access Time from CAS
tAA Access Time from Column-Address
(6, 7)
(6, 8, 15)
− 50 − 60 ns
− 14 − 15 ns
(6)
− 25 − 30 ns
tRAS RAS Pulse Width 50 10K 60 10K ns
tRP RAS Precharge Time 30 − 40 − ns
(21)
(23)
8 10K 10 10K ns
(9)
10 − 10 − ns
38 − 40 − ns
(10, 20)
12 37 14 45 ns
tCAS CAS Pulse Width
tCP CAS Precharge Time
tCSH CAS Hold Time
tRCD RAS to CAS Delay Time
tASR Row-Address Setup Time 0 − 0 − ns
tRAH Row-Address Hold Time 8 − 10 − ns
(20)
(20)
(11)
0 − 0 − ns
8 − 10 − ns
10 25 12 30 ns
tASC Column-Address Setup Time
tCAH Column-Address Hold Time
tRAD RAS to Column-Address Delay Time
tRAL Column-Address to RAS Lead Time 2 5 − 30 − ns
tRSH RAS Hold Time 8 − 10 − ns
tRHCP RAS Hold Time from CAS Precharge 30 − 35 − ns
(19, 24)
(15, 16)
(15, 24)
(21)
0 − 0 − ns
5 − 5 − ns
015 015 ns
− 12 − 15 ns
tCLZ CAS to Output in Low-Z
tCRP CAS to RAS Precharge Time
tOD Output Disable Time
tOE Output Enable Time
tOED Output Enable Data Delay (Write) 20 − 20 − ns
tOEHC OE HIGH Hold Time from CAS HIGH 5 − 5 − ns
tOEP OE HIGH Pulse Width 1 0 − 10 − ns
tRCS Read Command Setup Time
(17, 20)
0 − 0 − ns
tRRH Read Command Hold Time 0 − 0 − ns
(referenced to RAS)
(12)
tRCH Read Command Hold Time 0 − 0 − ns
(referenced to CAS)
tWCH Write Command Hold Time
tWP Write Command Pulse Width
(12, 17, 21)
(17)
(17)
8 − 10 − ns
8 − 10 − ns
tWPZ WE Pulse Widths to Disable Outputs 10 − 10 − ns
(14, 17, 20)
(17)
(17, 21)
13 − 15 − ns
8 − 10 − ns
0 − 0 − ns
tRWL Write Command to RAS Lead Time
tCWL Write Command to CAS Lead Time
tWCS Write Command Setup Time
Integrated Circuit Solution Inc. 7
DR026-0A 09/04/2001
Page 8

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
AC CHARACTERISTICS (Continued)
(1,2,3,4,5,6)
(Recommended Operating Conditions unless otherwise noted.)
-50 -60
Symbol Parameter Min. Max. Min. Max. Units
tOEH OE Hold Time from WE during 8 − 10 − ns
READ-MODIFY-WRITE cycle
tDS Data-In Setup Time
tDH Data-In Hold Time
(15, 22)
(15, 22)
(18)
0 − 0 − ns
8 − 10 − ns
tRWC READ-MODIFY-WRITE Cycle Time 108 − 133 − ns
RWD RAS to WE Delay Time during 64 − 77 − ns
t
READ-MODIFY-WRITE Cycle
tCWD CAS to WE Delay Time
tAWD Column-Address to WE Delay Time
PC EDO Page Mode READ or WRITE 20 − 25 − ns
t
(14, 20)
(14)
(14)
26 − 32 − ns
39 − 47 − ns
Cycle Time
tRASP RAS Pulse Width in EDO Page Mode 50 100K 60 100K ns
tCPA Access Time from CAS Precharge
(15)
− 30 − 35 ns
tPRWC EDO Page Mode READ-WRITE 56 − 68 − ns
Cycle Time
tCOH Data Output Hold after CAS LOW 5 − 5 − ns
tOFF Output Buffer Turn-Off Delay from 0 12 0 15 ns
CAS or RAS
(13,15,19, 24)
tWHZ Output Disable Delay from WE 310 310 ns
tCSR CAS Setup Time (CBR REFRESH)
tCHR CAS Hold Time (CBR REFRESH)
(20, 25)
( 21, 25)
5 − 5 − ns
8 − 10 − ns
tRPC RAS to CAS Precharge Time 5 − 5 − ns
tORD OE Setup Time prior to RAS during 0 − 0 − ns
HIDDEN REFRESH Cycle
tREF Auto Refresh Period 2,048 Cycles − 32 − 32 ms
tT Transition Time (Rise or Fall)
(2, 3)
1501 50ns
AC TEST CONDITIONS
Output load: Two TTL Loads and 100 pF (Vcc=5.0V±10%)
One TTL Loads and 100 pF (Vcc=3.3V±10%)
Input timing reference levels: VIH = 2.4V, VIL = 0.8V
Output timing reference levels: VOH = 2.0V, VOL = 0.8V
8 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 9

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
Notes:
1. An initial pause of 200 µs is required after power-up followed by eight RAS refresh cycle (RAS-Only or CBR) before proper device
operation is assured. The eight RAS cycles wake-up should be repeated any time the t
IH (MIN) and VIL (MAX) are reference levels for measuring timing of input signals. Transition times, are measured between VIH
2. V
and VIL (or between VIL and VIH) and assume to be 1 ns for all inputs.
3. In addition to meeting the transition rate specification, all input signals must transit between V
in a monotonic manner.
4. If CAS and RAS = V
5. If CAS = V
IL, data output may contain data from the last valid READ cycle.
IH, data output is High-Z.
6. Measured with a load equivalent to one TTL gate and 50 pF.
7. Assumes that ≤ t
increase by the amount that t
8. Assumes that t
RCD After appli tRCD (MAX). If tRCD is greater than the maximum recommended value shown in this table, tRAC will
RCD exceeds the value shown.
RCD ≥ tRCD (MAX).
9. If CAS is LOW at the falling edge of RAS, data out will be maintained from the previous cycle. To initiate a new cycle and clear the
data output buffer, CAS and RAS must be pulsed for t
10. Operation with the t
RCD (MAX) limit ensures that tRAC (MAX) can be met. tRCD (MAX) is specified as a reference point only; if tRCD
CP.
is greater than the specified tRCD (MAX) limit, access time is controlled exclusively by tCAC.
11. Operation within the t
RAD (MAX) limit ensures that tRCD (MAX) can be met. tRAD (MAX) is specified as a reference point only; if tRAD
is greater than the specified tRAD (MAX) limit, access time is controlled exclusively by tAA.
12. Either t
RCH or tRRH must be satisfied for a READ cycle.
13. tOFF (MAX) defines the time at which the output achieves the open circuit condition; it is not a reference to VOH or VOL.
WCS, tRWD, tAWD and tCWD are restrictive operating parameters in LATE WRITE and READ-MODIFY-WRITE cycle only. If tWCS ≥ tWCS
14. t
(MIN), the cycle is an EARLY WRITE cycle and the data output will remain open circuit throughout the entire cycle. If tRWD ≥ tRWD
(MIN), tAWD ≥ tAWD (MIN) and tCWD ≥ tCWD (MIN), the cycle is a READ-WRITE cycle and the data output will contain data read from
the selected cell. If neither of the above conditions is met, the state of I/O (at access time and until CAS and RAS or OE go back
IH) is indeterminate. OE held HIGH and WE taken LOW after CAS goes LOW result in a LATE WRITE (OE-controlled) cycle.
to V
15. Output parameter (I/O) is referenced to corresponding CAS input.
16. During a READ cycle, if OE is LOW then taken HIGH before CAS goes HIGH, I/O goes open. If OE is tied permanently LOW, a
LATE WRITE or READ-MODIFY-WRITE is not possible.
17. Write command is defined as WE going low.
18. LATE WRITE and READ-MODIFY-WRITE cycles must have both t
OD and tOEH met (OE HIGH during WRITE cycle) in order to ensure
that the output buffers will be open during the WRITE cycle. The I/Os will provide the previously written data if CAS remains LOW
and OE is taken back to LOW after t
19. The I/Os are in open during READ cycles once t
OEH is met.
OD or tOFF occur.
20. Determined by falling edge of CAS.
21. Determined by rising edge of CAS.
22. These parameters are referenced to CAS leading edge in EARLY WRITE cycles and WE leading edge in LATE WRITE or READMODIFY-WRITE cycles.
23. CAS must meet minimum pulse width.
24. The 3 ns minimum is a parameter guaranteed by design.
25. Enables on-chip refresh and address counters.
REF refresh requirement is exceeded.
IH and VIL (or between VIL and VIH)
Integrated Circuit Solution Inc. 9
DR026-0A 09/04/2001
Page 10

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
READ CYCLE
RAS
t
CAS
CRP
t
ASR
t
t
RAD
RAH
t
RCD
t
ASC
t
RAS
t
CSH
t
RC
t
RAL
t
RSH
t
CAS
t
CAH
t
RRH
t
RP
ADDRESS
Row Column Row
t
RCS
WE
t
AA
t
RAC
t
CAC
t
CLZ
I/O
Open Open
OE
Note:
OFF is referenced from rising edge of RAS or CAS, whichever occurs last.
1. t
t
RCH
(1)
t
OFF
Valid Data
t
OE
t
OD
10 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 11

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
EARLY WRITE CYCLE (OE = DON'T CARE)
RAS
t
CAS
CRP
t
ASR
t
t
RAD
RAH
t
RCD
t
ASC
t
RAS
t
CSH
t
RC
t
t
RAL
CAH
t
RSH
t
CAS
t
RP
ADDRESS
WE
I/O
Row Column Row
t
CWL
t
RWL
t
t
WP
t
DH
WCH
t
WCS
t
DS
Valid Data
Integrated Circuit Solution Inc. 11
DR026-0A 09/04/2001
Page 12

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
READ WRITE CYCLE (LATE WRITE and READ-MODIFY-WRITE Cycles)
t
RWC
t
RAS
RAS
t
CSH
t
RSH
t
CAS
CRP
t
ASR
t
RAH
t
RAD
t
RCD
t
ASC
t
CAH
t
CAS
t
RAL
t
RP
ADDRESS
WE
I/O
OE
Row Column Row
t
RWD
t
t
RCS
t
AA
t
RAC
t
CAC
t
CLZ
Open Open
t
OE
CWD
t
AWD
t
DS
Valid DOUT Valid DIN
t
OD
t
t
WP
DH
t
CWL
t
RWL
t
OEH
12 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 13

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
EDO-PAGE-MODE READ CYCLE
RAS
t
CSH
t
CAS
CRP
t
ASR
t
RAD
t
RCD
t
ASC
t
CAS
t
CAH
t
ASC
t
t
CP
RASP
t
RP
(1)
t
PC
t
CAS
t
CAH
t
ASC
t
CP
t
CAS
t
RAL
t
t
RSH
CAH
t
CP
ADDRESS
Row Row
t
RAH
Column Column
t
RCS
Column
t
RCH
t
RRH
WE
t
I/O
AA
t
RAC
t
CAC
t
CLZ
Open Open
t
OE
t
t
Valid Data
CAC
COH
t
AA
t
CPA
t
OEHC
t
CAC
t
CLZ
Valid Data
t
OD
t
AA
t
CPA
Valid Data
t
OE
t
OFF
t
OD
OE
t
OEP
Note:
1. tPC can be measured from falling edge of CAS to falling edge of CAS, or from rising edge of CAS to rising edge of CAS. Both
measurements must meet the t
PC specifications.
Integrated Circuit Solution Inc. 13
DR026-0A 09/04/2001
Page 14

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
EDO-PAGE-MODE EARLY-WRITE CYCLE
RAS
CAS
ADDRESS
WE
I/O
tCRP
tASR
tRASP
tCSH
tRCD
tRAD
Row Row
tRAH
Column Column
tWCH
tDS
tDH
tCAS
tASCtASC
tCWL
tWCS
tWP
tDS
Valid Data
tPC
tCP
Column
tCWL
tWCS
tWCH
tWP
tDH
Valid Data
tCAS
tCAHtCAH
tASC
tDS
tRSH
tCAS
tRAL
tCAH
tCWL
tWCS
tWCH
tWP
tRWL
tDH
Valid Data
tRP
tCPtCP
OE
14 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 15

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
EDO-PAGE-MODE READ-WRITE CYCLE (LATE WRITE and READ-MODIFY WRITE Cycles)
t
RASP
RAS
/ t
t
AWD
PRWC
t
CAH
t
CWD
(1)
t
CAS
t
CWL
t
WP
t
DH
t
DS
t
ASC
t
CP
t
CAC
t
CLZ
t
t
CPA
AA
DINDOUT
t
OD
t
OE
t
AWD
t
CAH
t
CWD
t
RAL
t
DS
t
CAS
t
RWL
t
CWL
t
t
DH
WP
t
RSH
DINDOUT
t
OD
t
OEH
CAS
ADDRESS
WE
I/O
OE
t
t
t
t
CLZ
CP
CAC
t
t
t
CPA
OE
PC
Column
AA
t
CSH
t
CRP
t
ASR
t
RAH
Row Row
t
RAD
t
RWD
t
RCS
t
t
ASC
RCD
t
Column Column
t
AA
RAC
t
CAC
t
CLZ
Open Open
t
OE
t
AWD
t
CAH
t
CWD
t
CAS
t
ASC
t
CWL
t
WP
t
DH
t
DS
DINDOUT
t
OD
t
RP
t
CP
Note:
PC is for LATE WRITE only. tPC can be measured from falling edge of CAS to falling edge of CAS, or from rising edge of CAS to
1. t
rising edge of CAS. Both measurements must meet the tPC specifications.
Integrated Circuit Solution Inc. 15
DR026-0A 09/04/2001
Page 16

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
EDO-PAGE-MODE READ-EARLY-WRITE CYCLE (Psuedo READ-MODIFY WRITE)
t
RASP
RAS
t
CSH
t
PC
t
CAS
t
CAH
t
RCH
t
WHZ
Valid Data (B)
t
ASC
t
t
CP
t
WCS
DS
t
RSH
t
CAS
t
RAL
t
CAH
t
WCH
t
DH
D
IN
CAS
ADDRESS
WE
I/O
OE
t
PC
t
CRP
t
ASR
t
RAH
Row Row
t
RAD
t
RCD
t
ASC
Column (A) Column (N)
t
RCS
t
AA
t
RAC
t
CAC
Open Open
t
OE
t
t
CAH
CAS
Valid Data (A)
t
ASC
t
CP
t
t
CPA
t
CAC
COH
Column (B)
t
AA
t
RP
t
CP
16 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 17

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
AC WAVEFORMS
READ CYCLE (With WE-Controlled Disable)
RAS
t
CAS
CRP
t
ASR
t
RAH
t
RAD
t
RCD
t
ASC
t
CSH
t
CAS
t
CAH
t
ASC
t
CP
ADDRESS
Row Column
t
RCS
WE
t
AA
t
RAC
t
CAC
t
CLZ
I/O
Open Open
t
OE
OE
RASRAS
RAS-ONLY REFRESH CYCLE (OE, WE = DON'T CARE)
RASRAS
t
RCH
t
WHZ
Valid Data
t
RCS
t
t
OD
CLZ
Column
t
RC
t
RAS
t
RP
RAS
t
CRP
t
RPC
CAS
t
RAH
Open
ADDRESS
I/O
t
ASR
Row Row
Integrated Circuit Solution Inc. 17
DR026-0A 09/04/2001
Page 18

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
CBR REFRESH CYCLE (Addresses; OE = DON'T CARE, WE=HIGH)
t
CSR
RAS
t
RPC
t
RP
RAS
CAS
t
RPC
t
RP
t
CHR
t
CP
t
t
CSR
t
RAS
t
CHR
I/O
HIDDEN REFRESH CYCLE
RAS
t
CRP
CAS
t
ASR
ADDRESS
I/O
Row Column
Open
(1)
(WE = HIGH; OE = LOW)
t
t
RAD
t
RAH
t
RCD
t
ASC
RAS
t
CLZ
t
RAL
t
RAC
t
AA
t
CAC
t
CAH
t
RSH
t
RP
Open Open
t
OE
t
ORD
t
RAS
t
CHR
t
Valid Data
OFF
(2)
t
OD
OE
Notes:
1. A Hidden Refresh may also be performed after a Write Cycle. In this case, WE = LOW and OE = HIGH.
OFF is referenced from rising edge of RAS or CAS, whichever occurs last.
2. t
18 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
Page 19

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
SELF REFRESH CYCLE (Addresses : WE and OE = DON'T CARE)
t
t
CSR
RASS
t
RPC
t
CP
Open
t
RPS
RAS
CAS
DQ
t
RP
V
IH
V
IL
t
t
RPC
t
CP
V
IH
V
IL
V
OH
V
OL
CHD
TIMING PARAMETERS
-50 -60
Symbol Min. Max. Min. Max. Units
tCHD 10 — 10 — ns
tCP 9— 9— ns
tCSR 10 — 10 — ns
tRASS 100 — 100 — µs
tRP 30 — 40 — ns
tRPS 84 — 104 — ns
tRPC 5— 5— ns
Integrated Circuit Solution Inc. 19
DR026-0A 09/04/2001
Page 20

IC41C44002A/IC41C44002AS(L)
IC41LV44002A/IC41LV44002AS(L)
ORDERING INFORMATION
Commercial Range: 0
°°
°C to 70
°°
°°
°C
°°
Voltage: 5V
Speed (ns) Order Part No. Refresh Package
50 IC41C44002A-50J 2K 300mil SOJ
50 IC41C44002A-50T 2K 300mil TSOP-2
60 IC41C44002A-60J 2K 300-mil SOJ
60 IC41C44002A-60T 2K 300mil TSOP-2
Speed (ns) Order Part No. Refresh Package
50 IC41C44002AS-50J 2K 300mil SOJ
50 IC41C44002AS-50T 2K 300mil TSOP-2
50 IC41C44002ASL-50J 2K 300mil SOJ
50 IC41C44002ASL-50T 2K 300mil TSOP-2
60 IC41C44002AS-60J 2K 300mil SOJ
60 IC41C44002AS-60T 2K 300mil TSOP-2
60 IC41C44002ASL-60J 2K 300mil SOJ
60 IC41C44002ASL-60T 2K 300mil TSOP-2
Voltage: 3.3V
Speed (ns) Order Part No. Refresh Package
50 IC41LV44002A-50J 2K 300mil SOJ
50 IC41LV44002A-50T 2K 300mil TSOP-2
60 IC41LV44002A-60J 2K 300mil SOJ
60 IC41LV44002A-60T 2K 300mil TSOP-2
Speed (ns) Order Part No. Refresh Package
50 IC41LV44002AS-50J 2K 300mil SOJ
50 IC41LV44002AS-50T 2K 300mil TSOP-2
50 IC41LV44002ASL-50J 2K 300mil SOJ
50 IC41LV44002ASL-50T 2K 300mil TSOP-2
60 IC41LV44002AS-60J 2K 300mil SOJ
60 IC41LV44002AS-60T 2K 300mil TSOP-2
60 IC41LV44002ASL-60J 2K 300mil SOJ
60 IC41LV44002ASL-60T 2K 300mil TSOP-2
Integrated Circuit Solution Inc.
NO.2, TECHNOLOGY RD. V, SCIENCE-BASED INDUSTRIAL PARK,
7F, NO. 106, SEC. 1, HSIN-TAI 5TH ROAD,
HSICHIH TAIPEI COUNTY, TAIWAN, R.O.C.
HEADQUARTER:
HSIN-CHU, TAIWAN, R.O.C.
TEL: 886-3-5780333
Fax: 886-3-5783000
BRANCH OFFICE:
TEL: 886-2-26962140
FAX: 886-2-26962252
http://www.icsi.com.tw
20 Integrated Circuit Solution Inc.
DR026-0A 09/04/2001
 Loading...
Loading...