

Page 1

DMR System Planner
Page 2

Page 3

Copyright Information
Hytera is the trademark or registered trademark of Hytera Communications Co., Ltd.
(the Company) in PRC and/or other countries or areas. The Company retains the
ownership of its trademarks and product names. All other trademarks and/or product
names that may be used in this manual are properties of their respective owners.
The product described in this manual may include the Company’s computer
programs stored in memory or other media. Laws in PRC and/or other countries or
areas protect the exclusive rights of the Company with respect to its computer
programs. The purchase of this product shall not be deemed to grant, either directly
or by implication, any rights to the purchaser regarding the Company’s computer
programs. Any of the Company’s computer programs may not be copied, modified,
distributed, decompiled, or reverse-engineered in any manner without the prior
written consent of the Company.
Disclaimer
The Company endeavors to achieve the accuracy and completeness of this manual,
but no warranty of accuracy or reliability is given. All the specifications and designs
are subject to change without notice due to continuous technology development. No
part of this manual may be copied, modified, translated, or distributed in any manner
without the express written permission of us.
If you have any suggestions or would like to learn more details, please visit our
website at: http://www.hytera.com.
Software Version
All the features in the system planner is based on R5.0 or above.
Page 4

Revision History
Version Date Description Remarks
R1.0 November 21, 2012 Initial release
Page 5

Contents
1 DMR Introduction................................................................................................ 5
1.1 Analog Communication VS Digital Communication......................................... 6
1.2 Hytera DMR Technology Introduction.............................................................. 7
1.3 Hytera DMR Technology Highlights................................................................. 8
2 Brief Introduction of DMR Functions ................................................................... 9
2.1 Basic Parameter Introduction .......................................................................... 9
2.2 Voice Services................................................................................................11
2.2.1 Group Call ......................................................................................................11
2.2.2 Private Call.....................................................................................................11
2.2.3 All Call ........................................................................................................... 12
2.2.4 Phone............................................................................................................ 12
2.3 Data Service.................................................................................................. 16
2.3.1 Text Message................................................................................................ 16
2.3.2 GPS............................................................................................................... 17
2.4 General Services........................................................................................... 18
2.4.1 Supplementary Service ................................................................................. 18
2.4.2 One Touch Call.............................................................................................. 20
2.4.3 Encrypt .......................................................................................................... 21
2.4.4 Telemetry....................................................................................................... 24
2.4.5 VOX............................................................................................................... 28
2.5 Emergency Alarm.......................................................................................... 30
2.5.1 Alarm............................................................................................................. 31
2.5.2 Emergency Call ............................................................................................. 32
2.5.3 Alarm with Call .............................................................................................. 32
2.5.4 Lone Worker.................................................................................................. 33
2.5.5 Man Down ..................................................................................................... 34
1
Page 6

Hytera DMR System Planner
2.6 Scan .............................................................................................................. 36
2.6.1 Scan List ....................................................................................................... 38
2.6.2 Scan Stay Condition...................................................................................... 39
2.6.3 Channel Scan Order...................................................................................... 40
2.7 Roaming........................................................................................................ 43
2.7.1 Roaming Methods ......................................................................................... 44
2.7.2 Configuring the RSSI Threshold.................................................................... 47
2.7.3 Setting Beacon Duration and Beacon Interval............................................... 51
2.7.4 Performance while Roaming ......................................................................... 54
2.8 Hytera Patented Features ............................................................................. 55
2.8.1 Pseudo Trunk................................................................................................ 55
2.8.2 Priority Interrupt............................................................................................. 62
2.9 Analog function ............................................................................................. 72
2.10 Back-to-Back................................................................................................. 74
2.10.1 Mobile Radio Accessory Pin ...................................................................... 74
2.10.2 Repeater Accessory Pin ............................................................................ 75
2.11 Hytera DMR Application Protocol .................................................................. 77
2.11.1 Radio Registration Service (RRS) ............................................................. 78
2.11.2 Positioning System(LP)......................................................................... 80
2.11.3 Radio Control Service(RCP) ................................................................. 82
2.11.4 Text Message Service (TMP)..................................................................... 83
2.11.5 Data Transmission Service (DTP).............................................................. 84
2.11.6 Telemetry Service (TMP) ........................................................................... 85
2.11.7 Real-time Transport Service (RTP)............................................................ 86
3 Components of DMR System ........................................................................... 87
3.1 Portable Radio............................................................................................... 88
3.1.1 Product Overview.......................................................................................... 89
3.1.2 Basic Operations........................................................................................... 92
3.2 Mobile Radio ................................................................................................. 95
3.2.1 Product Overview.......................................................................................... 96
2
Page 7

Hytera DMR System Planner
3.2.2 Basic Operations........................................................................................... 99
3.3 Repeater ..................................................................................................... 103
3.3.1 Introduction ................................................................................................. 104
3.3.2 Basic Operations......................................................................................... 106
3.4 RDAC (Repeater Diagnostics and Control) ..................................................110
3.4.1 Diagnose ...................................................................................................... 111
3.4.2 Control..........................................................................................................112
3.4.3 Repeater Configuration ................................................................................113
4 DMR System Topologies..................................................................................117
4.1 Direct Mode..................................................................................................118
4.1.1 Back-to-Back Mobile Radio Application in Direct Mode................................119
4.1.2 Further Development Functions in Direct Mode .......................................... 123
4.1.3 Telemetry..................................................................................................... 124
4.2 Repeater Mode ........................................................................................... 127
4.2.1 Back-to-back Repeaters.............................................................................. 128
4.2.2 Radio Dispatch............................................................................................ 133
4.2.3 Telemetry..................................................................................................... 133
4.3 IP Multi-site ................................................................................................. 135
4.3.1 Network Topology of IP Multi-site Connect.................................................. 137
4.3.2 Local Area Network ..................................................................................... 137
4.3.3 Wide Area Network (WAN).......................................................................... 138
4.3.4 WAN and LAN ............................................................................................. 140
4.3.5 Broadband Wireless Access........................................................................ 141
4.3.6 Digital Functions Supported in IP Multi-site Connect Mode......................... 146
4.4 Access Management................................................................................... 147
4.4.1 Local Access Management ......................................................................... 148
4.4.2 Multi-site Access Management.................................................................... 149
4.5 Repeat request priority ................................................................................ 152
4.6 Super Master............................................................................................... 152
4.6.1 Star Network Architecture............................................................................ 153
3
Page 8

Hytera DMR System Planner
4.6.2 Double-layer Network Architecture.............................................................. 154
4.7 Phone Interconnect ..................................................................................... 155
4.7.1 Phone Applications in Local Mode .............................................................. 155
4.7.2 Phone Applications in IP Multi-site Connect Mode ...................................... 158
5 DMR System Considerations.......................................................................... 159
5.1 Important notes of R4.0 update................................................................... 159
5.1.1 Subscriber ................................................................................................... 159
5.1.2 Repeater ..................................................................................................... 159
5.1.3 Interaction between Subscriber and Repeater ............................................ 160
5.2 Important notes of R4.5 update................................................................... 160
5.2.1 Subscriber ................................................................................................... 160
5.2.2 Repeater ..................................................................................................... 160
5.2.3 Interaction between Subscriber and Repeater ............................................ 160
5.3 Function interaction..................................................................................... 161
5.3.1 Phone Interconnect ..................................................................................... 161
5.3.2 Encryption ................................................................................................... 162
5.3.3 Pseudo Trunking ......................................................................................... 162
5.3.4 Priority Interrupt........................................................................................... 163
5.3.5 Roaming...................................................................................................... 165
5.3.6 IP Multi-site Connect ................................................................................... 166
5.3.7 Telemetry..................................................................................................... 169
6 DMR System Documentation and Applications............................................... 171
6.1 Documentation ............................................................................................ 171
6.2 CPS............................................................................................................. 172
6.3 Tuner........................................................................................................... 173
A. Appendix......................................................................................................... 175
A.1 Abbreviation ................................................................................................ 175
A.2 Hytera Official Website................................................................................ 176
4
Page 9

1 DMR Introduction
This chapter mainly introduces the Digital Mobile Radio (DMR) standards, focusing
on the protocol principles and tendency of the digital technology.
DMR is an open digital radio standard for professional mobile radio users published
by the European Telecommunications Standards Institute (ETSI) in 2004. This
standard aims to achieve a high-efficient professional wireless communication
system with less complexity and low cost.
DMR standard covers three tiers:
Tier I: This tier is for license-free use in the 446MHz band. It utilizes 6.25kHz
FDMA technology, targeted at the business market. Updated recently, Tier I
supports trunking system and becomes available for the professional market.
Tier II: This tier is for conventional communication. It adopts two-slot 12.5kHz
TDMA technology and targets the professional market.
Tier III: This tier is for trunking and simulcast communication. Besides two-slot
12.5kHz TDMA technology, it also supports network management applications.
This tier is targeted at professional market.
Digital technology presents a predictable tendency of the wireless communication,
which delivers products of better communication quality, higher security, more
spectrum resource and richer functions compared with analog products.
Hytera adopts the DMR technology and develops the digital radio compatible with
analog work mode. Hytera DMR radios can convert analog signals into digital
signals, and transmits both data and voice. Digital signals can be enhanced via the
gain and transmitted in a wider coverage. Based on TDMA technology, digital radios
accommodate much more subscribers.
5
Page 10

Hytera DMR System Planner
1.1 Analog Communication VS Digital
Communication
Analog communication has poor privacy protection. The signal transmitted by an
analog radio can be received by any other analog radio on the same channel. Thus
interference easily occurs in analog communication. However, digital
communication employs some technologies such as color code, which significantly
enhance the interference resistance.
In analog communication, the signal becomes weakened gradually, and thus affects
the coverage. In digital communication, however, the signal can be encrypted and
transmitted in a wider coverage. Signal interference also has a great impact on the
communication coverage: the more the signal interference occurs, the smaller the
coverage becomes.
In analog communication, the transmitting radio transmits on a specified channel
and the receiving radio has to receive the signals on the same channel. In digital
communication, the TDMA technology allows to divide the 12.5kHz channel into two
slots, which can serve as an independent channel. The transmitting radio transmits
on one slot (while the other slot stays idle), and the receiving radio detects the
signaling on both slots and receives signal on the active slot.
In analog communication, the FDMA technology allows multiple subscribers
simultaneously access a channel. However, with TDMA technology, one 12.5kHz
channel is divided into two 6.25kHz slots, and thus the spectrum resource is
expanded; moreover, the RF performance remains the same even though the
channel is divided. Compared with analog products, DMR products can
accommodate more subscribers and thus increases the system scope.
6
Page 11

Hytera DMR System Planner
1.2 Hytera DMR Technology Introduction
Hytera adopts the DMR technology and makes developments in compliance with
the ETSI DMR Tier II standards.
Hytera DMR radio collects the audio signals at the microphone, converts the audio
signals to analog signals, and then converts the analog signals to digital signals. In
addition, the sampling signal should be strong enough to ensure high audio quality,
so certain techniques are required to compress the signal.
After sampling, the radio processes the signal through coding technology, to filter
the unwanted noises and make signal compression.
The encoded signal (audio or data) is then transmitted in frames. The signal with
signaling can generate a digital data packet, which consists of the header (mainly
the control and air interface information) and payload (encoded audio or data) and
can be transferred over IP network. The header information repeats periodically
during transmission, which makes the signal more reliable and realizes the late
entry function.
The framing signal gets encoded for FM transmission. The bits contained in the
digital packets are encoded as symbols representing the amplitude and phase of the
modulated carrier frequency. Finally, the signal gets amplified and then transmitted.
7
Page 12

Hytera DMR System Planner
1.3 Hytera DMR Technology Highlights
Hytera DMR technology has many advantages compared with analog technology,
especially in aspects such as spectrum resource, capacity, coverage and
encryption.
The DMR technology divides one channel into two alternative slots, and thus allows
twice the channels based on the same spectrum resource. This is a big help to
relieve the stress of increasing shortage in spectrum resource. The 2-slot
technology doubles the repeater functions, which greatly reduces the cost and
minimizes the configuration complexity. Furthermore, its compatibility with analog
mode makes the transition cost-effective and smooth. The radio transmits on the
two slots alternatively, which can reduce the transmission time length and thus
ensure a longer endurance.
With Hytera DMR radios, it becomes possible to use two slots simultaneously. For
example, you can receive audio and data simultaneously on both slots, or transmit
audio on one slot while receive signaling to realize special functions, such as Priority
Interrupt, on the other slot. The audio transmission will not be affected by data
reception. In this way, users can experience a more efficient and swift
communication.
With DMR technology, the communication has a larger coverage and better
reliability. Analog signal is transmitted in sine waveform which may be subject to
more interference; while digital signal is transmitted in rectangular waveform that
can be optimized easily. In addition, digital signals can be transmitted very far by
either repeater or IP network. However, analog signal cannot be sent through IP
network.
During analog transmission, the signal can be received once the frequency is known,
and it can be decrypted easily even scrambler is applied. This is far from enough for
users who require reliable security. However, the digital signal can be encrypted
through special mechanisms, in which keys are applied to make the signal
inaccessible to anyone except those possessing the same key, so as to achieve
communication privacy.
8
Page 13

2 Brief Introduction of DMR Functions
DMR digital communications system realizes voice services (such as group call,
private call, all call, etc.), data services (such as text message, GPS data, ect.) and
supplement services.
This chapter mainly introduces some basic functions and their parameter
configurations of DMR conventional system.
2.1 Basic Parameter Introduction
DMR configurations involve some basic parameters which determine the basic
attributes of DMR equipment.
The main parameters are as follows:
Radio ID: The unique identification information of each radio. You must designate an
ID to the radio for other users to identify it when making a private call or sending
messages. The private call ID is the Radio ID.
Group Call ID: Used to identify a particular group. The group members must define
the group call ID, or they cannot receive the corresponding call.
Alias: The alias of a radio, private call contact and group call contact. It is
configurable for you so that it is more convenient to find the contact to call.
Channel: The channel provides communication services using the DMR digital
signaling. There is at least 1 digital channel and at most 1,023 digital channels that
can be established.
Color Code: This is used to identify a system. Users who wish to communicate with
each other in the same system are assigned with the same color code. A radio
ignores the channel activity which does not match the preset color code in this field,
as it is assuming the activity belongs to other system. In case that there are multiple
systems to be monitored, then different color codes must be assigned to the
corresponding channels. Range of the color code: 0 – 15.
Tx/Rx Frequency: The Tx/Rx frequency of the current channel. Both the frequencies
of the communicating parties must be matched.
Tx Admit: This is used to control the Tx authority of the radio. The administrator
can authorize different levels of users to different Tx rights: the low level users
can be authorized to Channel Free or Color Code Free; as for the high level
ones, they are set to Always Allow.
9
Page 14

Hytera DMR System Planner
Tx Admit: This is used to prevents you from transmitting on channels that are
already in use.
Always Allow: The radio can transmit via the PTT key any time regardless of the
channel.
Channel Free: The radio is allowed to transmit when the channel is free.
Code Color Free: The radio can transmit only when the channel is free or the
color code is not matched.
Group Call Hang Time: The time in which the radio still hangs in the group call after
the call is over. In other words, a member's PTT operation can call back the group
directly without contact list selection.
Private Call Hang Time: The time in which the radio still hangs in the private call
after the call is over. Within this period, either of the communication parties can call
back the other directly by holding the PTT key without contact list selection or
Acknowledge.
Time Slot: DMR applies TDMA scheme to divide the 12.5kHz channel into two
consecutive slots. Either slot can be used for communication or data transmission.
Slot 1: Slot 1 is used for transmitting and receiving in Repeater mode, as well as
receiving signals from repeater in Direct mode.
Slot 2: Slot 2 is used for transmitting and receiving in Repeater mode, as well as
receiving signals from repeater in Direct mode.
Pseudo Trunk: Both slots can be used simultaneously for communication or
data transfer in Direct and Repeater modes. And in Repeater mode, the slot is
alternative.
Note: Pseudo Trunk is one of the Hytera patents. Generally, in Repeater mode,
DMR standard protocol defines radios to transmit in the fixed slot. If the slot is
occupied, the radio has to wait for it instead of another free slot, wasting the
frequency band resources. However, the Pseudo Trunk feature allows two different
calls to be made simultaneously in Direct mode, as well as the dynamic slot
distribution in Repeater mode. This brings great convenience and efficiency to the
communications.
10
Page 15

Hytera DMR System Planner
2.2 Voice Services
DMR voice services support group call, private call and all call. It means that you
can make a call with a group, a person and all users in the system.
2.2.1 Group Call
A group call is transmitted to a group by a user. Each member in the group can hear
the others. The configuration of the group call contacts via the CPS is prior to make
a group call. After the configuration, you can make a group call by holding down PTT.
All the group members must be in the same slot on the same channel, and have the
matched Tx and Rx frequency and color code.
Parameter Configuration
The radio can only receive the group calls from the groups included in the Rx Group
List. Thus, to receive a group call, the available groups must be added into the Rx
Group List via the CPS. To make a group call, there must be available group
members in the contact list. In addition, the group call ID must be set.
Group Call Hang Time: Within this period, the group members can hold down PTT to
call any time without selecting the group from the contact list.
Tx Admit: The group call making radio shall not be set to “Rx Only”. Also, it must be
authorized to transmit group call prior to the call making.
Temporary Group Call
A user out of the group can make a temporary group call by the keypad, but such
calls will not be recorded into the call logs. In the temporary group call hang time,
the members can call back.
2.2.2 Private Call
A private call is made between two individual radios only. Both parties must be in the
same slot on the same channel and have the matched Tx and Rx frequency and
color code.
To make a private call, the radio must be designated with an ID. Then the call maker
will need to select the ID or alias of the called party to make a call.
Parameter Configuration
The ID of both the calling party and the called party must be configured before the
11
Page 16

Hytera DMR System Planner
call making. You may add the ID or alias of the contacts into the contact list via the
CPS or the radio menu. Even if you do not add the ID or alias, you can also enter the
call ID of a contact for calling.
Private Call Hang Time: Within this period, both parties can hold down PTT to talk
without selecting the other again.
Tx Admit: The private call making radio shall not be set to “Rx Only”. Also, it must
be authorized to transmit private call prior to the call making.
2.2.3 All Call
All Call is a call from an individual radio to all radios in the system. All Calls do not
communicate through special time slots or channels within the system. Only the
user with the high authority can make an all call. This is especially significant when
you need to communicate with all users in the entire channel. Both parties must be
in the same slot on the same channel and have the matched Tx and Rx frequency
and color code.
The all call maker must be authorized first via the CPS.
Parameter Configuration
Call ID value: 16777215 (not editable), An all call user should be with high authority.
The system administrator needs to set the all call user based on actual
requirements.
Tx Admit: The all call making radio shall not be set to “Rx Only”.
2.2.4 Phone
The Phone feature fullfils the communications between radio and phone via DTMF
signaling and the PSTN system.
With the Phone feature, the radio can be connected to the local PSTN gateway
device via the repeater, and then connected to the phone system, to realize the
communications. Besides, the radio can be connected to the remote PSTN gateway
device through the multi-site network to establish the communications. See the
following two figures.
The Phone feature is supported in both analog mode and digital mode. If you use
the multi-site network to realize the remote Phone feature, you should use the radio
and the repeater both in digital mode. The Phone feature only supports a call
between a radio of the system and a phone at a time, instead of multiple phones.
12
Page 17

Hytera DMR System Planner
Figure 2.2.4-1: Phone Network System via Local PSTN Gateway
Figure 2..2.4-2: Phone Network System with Multi-site PSTN Gateway
The Phone feature realizes the connection between the repeater and the PSTN
network by transmitting a call and DTMF signaling, so as to achieve the
communications between the radio and the phone. Phone interconnection, a special
form of the DTMF signaling application, is exclusively used for the communications
between radio and phone. Its operation is like this: the radio encodes two specific
tones into the DTMF code to represent for the digital symbols, loads the carrier with
the DTMF code and transmits it to the repeater. When the repeater is connected to
the radio, it will transfer the received DTMF code to the PSTN gateway device for
the communication with the phone. The call and the DTMF code are transmitted
together in this process: the radio transmits a call and an access code to connect to
13
Page 18

Hytera DMR System Planner
the repeater and the public switched telephone network (PSTN) respectively,
achiving its communications with a specific phone. The call ends when the radio
sends the de-access code or when the phone is hung up. Like the call between
the radios, the call between the radio and the phone is subject to time limit.
The DTMF (Dual-Tone Multi-Frequency) encoding technology uses two sepcific
tones (high and low) to represent a number (as shown in the following figure), so as
to realize some features. It is often designed with 16 keys (numeric keys 0~9 and
function keys *, #, A, B, C and D). As the DTMF code consists of a high frequency
(f1) and a low frequency (f2), the equation of corresponding signal is:
F(t)=A.sin(2.pi.f1.t)+A.sin(2.pi.f2.t).
High frequency
Low frequency
Figure 2.2.4-3: Tone Combination for DTMF
Note: A, B, C, D, and the pause code (“P”) only can be input via the CPS.
There are two dialing methods including live dial and buffer dial.
Live Dial: During the voice transmission via PTT, the radio will send the
corresponding DTMF code immediately after you enter a digit via the keypad, like
dialing the number on the phone. When you release PTT, the radio will stop the
transmission. When making Live Dial operation, press the programmed key to
transmit the access code.
Buffer Dial: Enter the needed DTMF code and then hold down PTT to transmit it,
like dialing on the mobile phone. This method works only when you enable the
DTMF keypad mode. You can enable the DTMF keypad via the CPS or the radio
menu.
In analog mode, the radio will load the carrier with the DTMF code and transmit the
14
Page 19

Hytera DMR System Planner
code directly. The repeater will transfer the received DTMF code to the PSTN
gateway to connect the phone system for communications between the radio and
the phone. When a call is received from the phone, the radio needs to send the
DTMF code to put through the call. During the call, the phone can receive the voices
transmitted by any other radio in the system. Likewise, the voice transmitted by the
phone will be received by any radio in the system.
In digital mode, the radio will transmit signalings and the DTMF code to the repeater.
Then the repeater will transfer the DTMF code to the PSTN gateway device to
connect the phone system and put through the call. When the buffer dial is used, the
radio call type matches the type of the transmitting contact on the channel. If a
private call contact is selected as the transmitting contact, the radio will make a
private call to the phone. The radio can receive call from the phone and private calls
from other radios simultaneously. If a group call contact is selected, the radio will
make a group call to the phone. All group members can communicate with the
phone upon establishing this call. If an all call contact is selected, the radio will make
an all call to the phone. All radios in the system can communicate with the phone
upon establishing this call. During live dialing, the call type depends on which kind of
call is initiated upon holding down PTT, but is not necessarily associated with the
transmitting contact on the channel. During buffer dialing, the call type is consistent
with the type of the transmitting contact when you make a call from the contact list.
Generally, what kind of call the phone initiates to the radio is subject to the type of
the transmitting contact in the repeater. However, if the radio makes a private call
whose ID is the repeater’s ID, the call type has no bearing on the type of the
transmitting contact in the repeater.
After a radio sends the Access Code and talks with the phone, the phone will receive
voice from other radios in the system. In this case, interference may occur if several
radios send voice simultaneously. The voice from radio with strong RSSI will replace
one from radio with weak RSSI.
15
Page 20

Hytera DMR System Planner
2.3 Data Service
DMR data services include text message, GPS, supplement services, etc. In this
chapter, we mainly introduce text message and GPS services.
2.3.1 Text Message
With DMR technology, you can send, receive, forward and save text messages
using your radio. For your convenience, you can preset the regular text messages
and save them in the radio in advance. Then you can send a preset message
directly or after you edit it. In the radio with display, you can enter any text message
via the keypad, save it in the radio and send it. As for the radio without display, you
can only preset the message via the CPS, and send it by the programmed key.
However, you are not able to check or edit it through the radio. You can use a
Hytera DMR radio to send text message to an individual user, a group or the control
station, and reply or forward the message to other radios.
Text messages are applied in:
Communication of sensitive information;
Noisy environment where it is hard to hear the voice clearly;
The radio with problem in voice services.
Text message include two categories: private message and group message.
Private message: text message sent between two radios.
Group message: text message sent by a radio to a group of radios. The group
message differs from the private message in that it is a point-to-many service
without acknowledge.
Parameter configuration
The same as private call, text message needs such parameter configurations: ID,
color code, frequency and slot, and it is subject to Tx Admit.
As private message is sent between two radios, it does not involve a third party ID.
Both parties must be in the same slot on the same channel and have the consistent
Tx and Rx frequency and color code.
To send private message, you need to set the ID first. You may search for the
receiver by the ID or the alias.
16
Page 21

Hytera DMR System Planner
The Tx Admit settings of private message are the same as those of private call.
The same as group call, group message requires that all the members must be in
the same slot on the same channel and have the consistent Tx and Rx frequency
and color code.
The Tx Admit settings of group message are the same as those of private call.
2.3.2 GPS
DMR supports GPS technology. The GPS feature is mainly used to check the radio’s
position and send GPS short message. You can send GPS message to inform the
control station or other radios the geographic position you are at. The feature is
only available for radios with the GPS modular.
GPS Setting
To apply the GPS feature, you need to enable it via the CPS. You can also set the
time zone, GPS speed unit and its update time on actual requirements.
After the feature is enabled, the radio will automatically search for the satellite and
update the GPS data until the feature is disabled.
GPS Message
GPS message is sent in DMR text message.
GPS Revert Channel
The GPS revert channel is used for GPS data report. After the radio makes
successful RRS registration, the control station can require the radio to report its
geographic position information according to the LP service agreement. And the
radio will report its position information to the control station regularly. During the
GPS data report, if the channel is occupied for other use, the radio will revert to the
preset channel to send the GPS message.
You need to set the “GPS Revert Channel” parameter via the CPS prior to use this
channel. When setting, you will need to consider the following notes:
This feature is available on the digital channel only.
This parameter will be unavailable if "Rx Only" is checked for the channel.
This parameter will be unavailable if "RRS" is unchecked for the channel.
This parameter will be unavailable if "Forward to PC" in “Network” is checked.
17
Page 22

Hytera DMR System Planner
2.4 General Services
2.4.1 Supplementary Service
Hytera DMR has the same supplementary service feature mechanism with Motorola.
Hence, these two brands of radios can communicate with each other.
Hytera DMR radios have five supplementary services as follows:
Radio Check
Remote Monitor
Alert Call
Radio Disable
Revive
You can initiate any of these services via the radio menu or using the shortcut key
assigned with One Touch Call feature. Meanwhile, the target radio must have the
Decode feature to decode the command accordingly, otherwise, it will not be able to
respond to the received command.
Radio Check
This feature is mainly used to check whether the target radio is in use in the system
without disturbing it. When a Radio Check command is received, the target radio will
give no visible or tone indication but will send back a confirmation message to the
initiating radio automatically. This command is mainly used to see if the target radio
is available. After the radio replies the confirmation message, the initiating radio can
call the target radio or go on controlling it through other commands such as Remote
Monitor, Radio Disable, etc.
To use the Radio Check feature, the Encode and Decode feature must be enabled
for the initiating radio and the target radio respectively via the CPS.
Remote Monitor
With this feature, you can activate the microphone of the target radio remotely, so
that the microphone will transmit the background voice to the initiating radio secretly.
In this way, the initiating radio can monitor the target radio’s communications. You
can set the time for remote monitor via the CPS.
The Remote Monitor feature is used to check the status of a radio which is already
turned on but has no response. Such problem occurs in the following factors:
18
Page 23

Hytera DMR System Planner
The target radio is stolen.
You fail to use the radio properly.
You need to have handsfree communications.
There are two types of remote monitor: remote monitor and emergency remote
monitor. You need to configure the corresponding parameters for the target radio via
the CPS. If only “Remote Monitor Decode” is selected, the target radio will decode
the received Remote Monitor command and transmit a secret call in non-emergent
situations. If you need the radio to decode the Remote Monitor command in
emergency, you will need to select “Emergency Remote Monitor Decode” first. Only
after you select this parameter, will the target radio decode the received Emergency
Remote Monitor command and transmit a secret call to the initiating radio, otherwise,
it will not respond.
Alert Call
With this feature, you can alert another user by sending the data such as signaling.
When the target radio receives the data, it will alert that user by giving tone and LED
indication, as well as the display (including the radio ID or alias) on the LCD, until
the user clears these indications. When the target radio receives the Alert Call
command, its user can press PTT to alert the initiating radio to make a call. If the
target radio is a mobile radio, when it receives an alert call, it will alert the user by
giving the horns, lights, etc.
To use the Alert Call feature, you need to preset the “Alert Call” parameter and the
“Alert Call Decode” parameter for the initiating radio and the target one respectively
via the CPS.
Radio Disable
Radio Disable allows you to remotely disable a lost or stolen radio, making it
unavailable for operational use. The functions could help prevent potential risks.
This function also allows you to temporarily disable a radio, to prevent unauthorized
use of channel resource. The disabled radio will have a blank display and be unable
to initiate or receive calls, but it can be turned on or off. If such phenomena happen
to your radio, it means your radio is disabled. You can revive it through the CPS or
another radio.
The target radio can only be disabled in the coverage of the system signals. When a
radio is disabled during roaming or hunt, it will still be lockd on the channel at the
station where it is disabled. To revive the radio, you must take it back there.
Generally, all radios can be disabled by default. You can revise the configuration by
setting the “Radio Disable” and “Radio Disable Decode” parameters via the CPS.
19
Page 24

Hytera DMR System Planner
Radio Enable
This feature is used to revive a found radio which has been stolen or lost, as well
as a radio which was disabled to release the channel.
The Radio Enable command works with the Radio Disable operation. Besides
selecting the “Radio Disable/Enable Decode” parameter, you need to select the
“Radio Enable” and “Radio Disable” parameters, or you can only enable the radio
via the CPS.
2.4.2 One Touch Call
One Touch Call brings you a quick way to make a call.
Before using this feature, you need to associate the contact with the One Touch Call
option, and set the programmable keys corresponding to the hard keys. After that,
you can make a call or send a message to the preset contact by simply pressing the
programmed key, instead of having successive operations via the radio menu.
You can set at most five One Touch Calls for your radio. When setting the
parameters, you need to configure the “Call Mode” and the “Call List”, as well as the
“Call Type” options. The “Call Mode” includes two categories: Digital and Analog.
The modes must be associated with the programmable keys and the hard keys.
Call Mode:
None: To disable the One Touch Call function.
Digital: To enable the One Touch Call function in digital mode.
Analog: To enable the One Touch Call function in analog mode.
Call List: This option allows you to view all available contacts or shortcuts list.
In digital mode, available options include: None, Group/Private Call Alias.
In analog mode, available options include: Smart Call1 – Smart Call5.
Call Typs: This option allows you to set the service type for One Touch Call.
Group contact: Available options include Group Call, Message and GPS
Message.
Private Contact: Available options include Private Call, Message, GPS
Message, Alert Call, Radio Check, Remote Monitor, Radio Enable and Radio
Disable;
Quick Text: This option allows you to configure the text to be sent by One Touch
Call.
Note: Only when the Cally Type is set to “Quick Text” can this feature be available.
The message contents are from the Quick Text list in “DMR Services”.
20
Page 25

Hytera DMR System Planner
When using the One Touch Call feature to transmit a private call or group call, you
need to hold down PTT to complete the transmission. The One Touch Call feature is
effective on the current channel only. Once you switch the channel when using it, the
One Touch Call operation will terminate.
The configuration of One Touch Call does not cover the configuration of the services
initiated through this feature. For example, if you need to have Radio Check
operation through the One Touch Call feature, you also need to preset the Radio
Check feature for both the initiating radio and the target radio, or the target radio will
not respond to the Radio Check command. The One Touch Call feature is
configured via the CPS other than the radio. Also, you cannot delete the preset One
Touch Call contacts through the radio.
All the services (such as Private Call, Group Call, Radio Check, etc.) triggered by
the One Touch Call feature will have the same process and effect as they are
operated through the menu.
Note: When the radio is disabled or in emergency call, you cannot have One Touch
Call operaion on it.
2.4.3 Encrypt
This function provides end-to-end encryption for communication (including voice
and data) on digital channels, allowing the target radio rather than other
unauthorized radios to receive the voice and data privately.
Hytera provides two types of encryption: basic encryption and advanced encryption.
Only the communicating parties in the call know the encryption key. Advanced
encryption provides two types of protocols: Hytera encryption and DMRA encryption.
Hytera encryption adopts the encryption algorithm innovated by itself, and DMRA
encryption is DMR standard encryption which applies the technology/encryption
provided by DMR association. In addition, basic encryption adopts the encryption
technology innovated by Hytera, too.
2.4.3.1 Basic Encryption
The basic encryption can prevent your voice or data from being eavesdropped or
accessed by other party. It has the following features:
1) You can configure the key type and value freely. The key types: 40 bits (10
characters), 128 bits (32 characters) and 256 bits (64 characters).
2) It transforms the voice or data using simple mathematical algorithm.
The basic encryption applies simple algorithm based on the encryption key value to
encrypt the voice or data. Though not so complicated as the advanced encryption
21
Page 26

Hytera DMR System Planner
algorithm (e.g.: AES, ARC4), the basic encryption expands the encryption key value
into three types with up to 256 bits. This provides more reliable protection to the
transmitted voice and data, preventing the communications from eavesdropping.
Voice encrypted with this mechanism has the same system access time with
unencrypted voice since no encryption parameter is required to be sent. See the
following figure for the basic encryption flow.
Figure 2.4.3.1-1: Basic Encryption Process
* The key plays an important role in encryption. It is recommended to configure a
unique key, which has at least five different bits from other keys after converted into
binary value; otherwise a warning will pop up. However, this does not affect your
operation.
2.4.3.2 Advanced Encryption
The advanced encryption provides a safer and more reliable encryption mechanism
and encryption algorithm as introduced below:
1) You can configure the key type (40 bits, 128 bits and 256 bits) and value freely.
2) The advanced encryption with the key of 40 bits adopts ARC4 algorithm to
generate the key stream for conversion of the original voice/data; as for the
advanced encryption with with the key of 128 or 256 bits, it applies AES algorithm to
generate the key stream for the conversion. Even with the same key, the advanced
encryption will provide different key streams to the voice super frames and data
packs, to avoid the attackers grasping the voice or data over the air for decoding the
key.
During the encryption key generation through the algorithm, Hytera will have extra
processing, while DMRA encryption will directly generate the key, as even with the
same value, these two technologies will generate different keys.
22
Page 27

Hytera DMR System Planner
In this mechanism, an extra header is required for sending the encrypted
parameters, and it prolongs the system access time (by approximately 60ms).
Meanwhile, the voice super frame will be embedded with some synchronous
encryption information to prolong the system delay access time.
Hytera encryption defines its own way in embedding the encryption parameter into
the voice super frame, which is different from the DMRA encryption.
See the following figure for the advanced encryption flow.
Figure 2.4.3.2-1: Advanced Encryption Process
With the different processes and the different ways of encryption, an encrypted radio
by Hytera and that encrypted by DMRA encryption cannot communicate with each
other.
2.4.3.3 MultiKey Decrypt
MultiKey Decrypt is used to decrypt the received voices and data from different
radios with multiple keys defined in the list. Please be noted that the signal can only
be decrypted with the corresponding key. Upon the receipt of the encrypted voice or
data, the radio will find a key from the list to decrypt it. The MultiKey Decrypt is
significant to system with strong confidentiality.
23
Page 28

Hytera DMR System Planner
2.4.4 Telemetry
Telemetry is a function, which allows you to monitor devices remotely via the mobile
radios. To be specific, when a mobile radio connects with the external device, you
can monitor it remotely by another mobile radio. However, it is required to make
some configurations related with telemetry for the mobile radio in advance.
In some work places, users may not always keep the devices nearby but need to
monitor them any time. The Telemetry feature can help users to realize the remote
monitor on the devices any time.
Currently, Hytera Telemetry feature is only available for conventional portable and
mobile radios in digital mode, except repeaters.
The telemetry feature allows you to monitor and control the status of GPIO pins for a
mobile radio attached to the external device, which in turn can monitor this device
remotely by another mobile radio.
When a remote radio connects with an external device, it is capable of responding to
the command sent by the current radio according to the predefined telemetry
functionality. For example, you send a Query Status command to the target radio to
obtain the GPIO status of the remote radio, so that the device user will know the
operation status of the monitored device. The remote radio will output a level from
the predefined GPIO Pin to control the external device.
To transmit the command, the radio must be configured with the Telemetry
command. In addition, the programmable key shall be set to Telemetry Button, the
GPIO port corresponding to the Telemetry VIO. In addition, all above configurations
must be identical for both the target terminal and the originating terminal.
The same as other transmission by a radio in digital mode, the Telemetry command
is subject to Tx Admit. When the channel or the color code is occupied, etc, the
command cannot be transmitted. You can select the private call or group call from
the contacts to send the telemetry command. However, the specific transmission
mode varies with different telemetry commands.
24
Page 29

Hytera DMR System Planner
Figure 2.4.4-1: Telemetry Principle
The connection between the radio and the device is fulfilled by the third party who
will determine the connection form.
The portable radio supports one telemetry VIO (GPIO Pin1). The mobile radio
supports 6 telemetry VIOs. GPIO Pin3, Pin12, Pin 16, Pin20, Pin22 and Pin23 can
be set to the telemetry VIO.
For mobile radio:
High TTL: 3.6–5V; Low TTL: 0–2.4V
GPIO Pin input: 0–1.2V (low); 2.0–5V (high).
GPIO Pin output: 0–0.8V (low); 2.4–5V (high).
For portable radio:
GPIO Pin input: 0–0.3V (low); 0.7–3.3V (high).
GPIO Pin output: 0–0.22V (low); 0.8–3.3V (high).
GPIO Interface
GPIO Interface of Portable Radio
The portable radio supports one telemetry VIO, which is associated with GPIO Pin11.
See the following figure.
25
Page 30

Hytera DMR System Planner
Figure 2.4.4-2: GPIO Interface of Portable Radio
GPIO Interface of Mobile Radio
The mobile radio supports 6 telemetry VIOs. GPIO Pin3, Pin12, Pin 16, Pin20, Pin22
and Pin23 can be set to the telemetry VIO. See the following figure:
Figure 2.4.4-3: GPIO Interface of Mobile Radio
26
Page 31

Hytera DMR System Planner
Voltage Range of GPIO Pin
For mobile radio:
High TTL: 3.6–5V; Low TTL: 0–2.4V
GPIO Pin input: 0–1.2V (low); 2.0–5V (high).
GPIO Pin output: 0–0.8V (low); 2.4–5V (high).
For portable radio:
GPIO Pin input: 0–0.3V (low); 0.7–3.3V (high).
GPIO Pin output: 0–0.22V (low); 0.8–3.3V (high).
There are three ways to activate the Telemetry feature: pressing the programmed
Telemetry key, GPIO status change and receiving the appropriate command from
other radios.
To activate this feature by a programmable key, you need to perform related
operations with the radio and assign it to the programmable key. For example, you
can associate the “Send Pulse Command” with “Telemetry Button”, and assign
“Send Pulse Command” to TK key. Then you can press the TK key to send pulse
command.
When the radio is connected with a telemetry device, any change in device status
would result in GPIO status change. Providing there is any command associated
with GPIO status change, the radio will implement the command when GPIO status
changes. For example, when the GPIO status changes as a result of the change in
the status of connected telemetry equipment, the radio will implement the
predefined command, namely, it will send its GPIO status to the target radio. In this
way, you can know the status of other equipment remotely.
When a radio receives the command from another radio, it will perform an
appropriate operation associated with the command. For example, it receives
“Toggle Voltage Command”, and it will toggle the voltage of specified GPIO Pin as
configured previously.
27
Page 32

Hytera DMR System Planner
2.4.5 VOX
The VOX (Voice-operated Transmit) feature indicates that you can trigger the voice
transmission by voice directly rather than PTT. This brings more convenience to you
in radio use.
After this feature is enabled, when the microphone detects that your voice reaches
the required volume to trigger the transmission, your voice will be transmitted
automatically.
To use the VOX feature, you need to predefine the parameters, especially the “VOX
Gain Level”. Generally, a radio has an internal microphone and an external one. The
internal microphone is a built-in microphone in the radio; the external microphone is
on the accessory. Different microphones have different gain levels. In the CPS,
there are parameters for the external and internal microphone respectively. For both
microphones, the bigger the gain value is, the higher the gain level and the lower the
sensitivity will be. Adjust the “VOX Gain Level” properly on your actual
requirements.
In actual use, VOX will not work until the detected voice reaches the required
volume. As we know that people talk with some pauses. During the pauses, the
microphone detects no voice fulfilling the requirements. If it stops the transmission
then, the user’s communication fluency will be affected. To avoid this, the system
provides the VOX Hold Time: during the voice transmission, the radio will hold the
transmitting status even if the detected voice is under the required volume, so the
communication will be smooth. The VOX Hold Time shall be defined regarding the
your speaking habits. If it is set too long, the radio will stay in transmitting status
even if you have finished talking, which will consume more power of the radio; too
short time will affect the communication.
You should have reasonable configurations of the other parameters of VOX to fit
different environments. Besides, the radio or microphone should be put in proper
position, so as to avoid the transmission when the environmental noise meets the
volume requirements.
28
Page 33

Hytera DMR System Planner
Note that the voice transmission via VOX is the same as holding down PTT in that
the radio will also give a tone for available communication. During transmission, if no
voice is detected, the radio will start VOX Hold Time counting. If the time is over
without any voice detected, the transmission will terminate and the radio will enter
the Call Hang Time.
When the radio is in use, its speaker will play such sound as tones and the received
voice. These sounds may also be detected when VOX is active. To prevent
transmitting such sounds, the radio will automatically disable the microphone
detection when the speaker is on and enable it again when the speaker is off.
When in auto transmission such as the hot microphone on for an emergency alarm
or remote monitor, the radio will disable VOX.
VOX is a feature associated with the current channel and will not affect other
channels. The VOX feature can be enabled/disabled through the following three
methods:
Radio menu;
Programmable key;
CPS.
When using PTT, the VOX will be paused, but the feature on the current channel is
still active, no matter whether the radio is switched to other channel or rebooted.
29
Page 34

Hytera DMR System Planner
2.5 Emergency Alarm
This feature helps you to request for aid in emergency. When an Emergency system
is associated to a channel, you can activate emergency feature through the
programmed key.
Hytera DMR system provides four types of emergency alarms:
z Siren Only: The radio emits siren locally.
z Regular: The radio gives visible and audible indications during emergency
state.
z Silent: The radio gives no indication during emergency state.
z Silent with Voice: The radio gives no indication during emergency state, but
will unmute its speaker once it receives a call.
You can select the alarm type on actual requirements. Siren Only indicates the radio
will not transmit the emergency code and emergency call, but only emit siren for
warning. This type is mainly applied in public activities in which you need no other
support. When some support is needed, you can choose Regular, so the radio will
transmit the emergency code or emergency call. Some visible and hearable
indiations will be given. In special occasions, it may be inconvenient to you to make
emergency operation with visible and hearable indications. Silent type will be
preferable then, as during the transmission of silent alarm, the radio will not give any
visible or hearable indications, not affecting the operation of the receiving radios in
the system. A radio with automatic emergency call will receive acknowledge from
other emergency alarm receiving radios. If Silent is selected, the emergency calling
radio will mute the speaker despite of received voices, and you will not know other
users’ responses. If you want to hear the acknowledge from other radios when using
Silent alarm, you can choose Silent with Voice for your radio. In this alarm type, the
radio will only play the received responding voices from other radios without giving
any other visible or hearable indications.
In DMR emergency system are three emergency modes:
z Alarm: The radio only triggers emergency process after you activate
Emergency.
z Alarm with Call: The radio sends emergency alarm and the emergency call
upon Emergency activation.
z Call Only: The radio only transmit emergency call upon Emergency activation.
30
Page 35

Hytera DMR System Planner
Alarm mode is used to inform the other radios in the system that you need help.
Those radios will check the ID of the transmitting radio and take actions. This
emergency mode can inform the other users that you are in danger, but it cannot tell
your actual situation. Hence, the other users cannot take correct measures for help.
In this case, you can use Call Only to transmit an emergency call so that the other
users in the system will know your actual needs. The Alarm with Call mode indicates
you can send the emergency alarm and the emergency call together. It is useful
when the current channel is occupied, which blocks the emergency alarm. The
system has a revert channel for the radio to transmit the emergency alarm. You can
define the revert channel on actual requirements. And note that the preset channel
shall be convenient to other users for receiving and seldom occupied. In the revert
channel, the transmitting contact must be a group call contact rather than a private
call contact. To avoid mistaken configuration, the channel on which the transmitting
contact is a private call contact is unavailable when you are setting the revert
channel for emergency alarm.
2.5.1 Alarm
In this mode, after the emergency alarm is enabled, the radio will transmit the
emergency code; when other users in the system receive the code, they will give an
ACK (acknowledge), and then the emergency code transmitting radio will enter the
emergency status. You can set the code to be sent for multiple times, to arouse the
attention of the other users or to avoid transmission failure due to abnormal channel.
You can define the times of emergency code transmission by setting the “Impolite
Retries” and “Polite Retries” in the CPS. An impolite transmission occurs despit of
the occupied channel, while a polite transmission will not take place forcibly. The
polite transmission indicates that radio will wait and suspend transmitting if the
channel is busy, but will transmit forcibly after a certain period if the channel is
always busy. The transmission times will only be configurable during the emergency
alarm or emergency call transmission.
During the emergency alarm, the radio will transmit the emergency code on the
emergency transmitting channel, and will wait for one ACK from the receiving radios.
The radio will retry the transmission and wait for the ACK. When waiting for the ACK,
the radio will only take the ACK code as effective. If no ACK is received within the
transmission retries, the radio will give an indication and quit the emergency status.
When the radio is waiting for the ACK, if PTT is held down, the ACK is received or
the retries (including all the impolite and polite retries) are all used, the radio will quit
the emergency status.
31
Page 36

Hytera DMR System Planner
2.5.2 Emergency Call
This mode indicates that the radio will transmit the emergency call on the
emergency channel, and then directly enter the emergency status instead of
transmitting the emergency code and waiting for the ACK. You can transmit the
emergency call by holding down PTT. Sometimes, you cannot hold down PTT. In
that case, other users in the system will not receive your call so they will not know
your situation. To avoid this, you can define the automatic emergency call which is
transmitted via the microphone without using PTT. You can set the voice cycles,
handsfree transmission starting time and duration.
After entering the emergency alarm, the radio will stay on the emergency
transmitting channel. Now you can make an alarm with emergency call using PTT
and receive alarms with emergency calls.
In automatic emergency call, the radio will transmit emergency call automatically
and receive emergency calls. It will also make voice cycles as predefined, and enter
the emergency status after transmission. If you hold down PTT to respond when
receiving an emergency call, the voice cycle will terminate and the radio will enter
the emergency status.
2.5.3 Alarm with Call
Alarm with call combines the emergency call with the alarm. After the emergency
system is started, the radio will need to wait for an ACK. When the ACK is received,
the radio will enter the emergency status and you can hold down PTT to transmit an
emergency call. You can also make the call using PTT during waiting for the ACK,
but the radio will directly enter the emergency status and stop sending the
emergency code.
After the alarm with call is activated, the radio will send the emergency code and
wait for the ACK circularly. After the cycles, it will enter the emergency status in
which you can hold down PTT to make en emergency call.
The radio can also transmit an emergency call automatically after it sends the
emergency code and waits for the ACK. The automatic emergency call needs
configuration via the CPS.
32
Page 37

Hytera DMR System Planner
2.5.4 Lone Worker
Lone Worker emergency is used to ensure your safety. You can set a time period for
your radio. If no keypad operation is made on the radio within this period, the radio
will trigger the emergency alarm automatically. This feature is designed for people
(such as police, firefighters, miners, etc.) in dangerous workplaces.
With this feature, the radio will automatically transmit an alarm to alert the related
users when you are in danger and fail to take any actions.
Lone Worker is a timed emergency feature. Within the preset Lone Worker
Response Time, if there is not any operation on the radio keypad, the radio will
transmit an emergency alarm to inform the related users that you are in danger. If
you operate the radio within the preset time, the radio will not transmit the alarm,
and the Lone Worker Response Time will be counted from the beginning again.
There may be mistaken alarm in actual use, so another feature is added: Lone
Worker Remind Time. In the preset period, the left Lone Worker Response Time,
before the Emergency mode is initiated, the radio will remind you that the alarm is
due. If you are safe, you can have any key operation to relieve the radio from alarm.
You can define the Lone Worker feature, as well as the Lone Worker Response
Time and Lone Worker Remind Time under the feature, via the CPS only. If you
want to activate or inactivate the feature through the radio, you must select “Lone
Worker” option in “Menu” in the CPS. You can assign the programmable key with
Lone Worker feature, so you can activate or inactivate the feature by pressing the
key. Besides, you can also set the Lone Worker feature to be activated automatically
via the CPS. You can use any of the aforesaid three ways to activate this feature.
33
Page 38
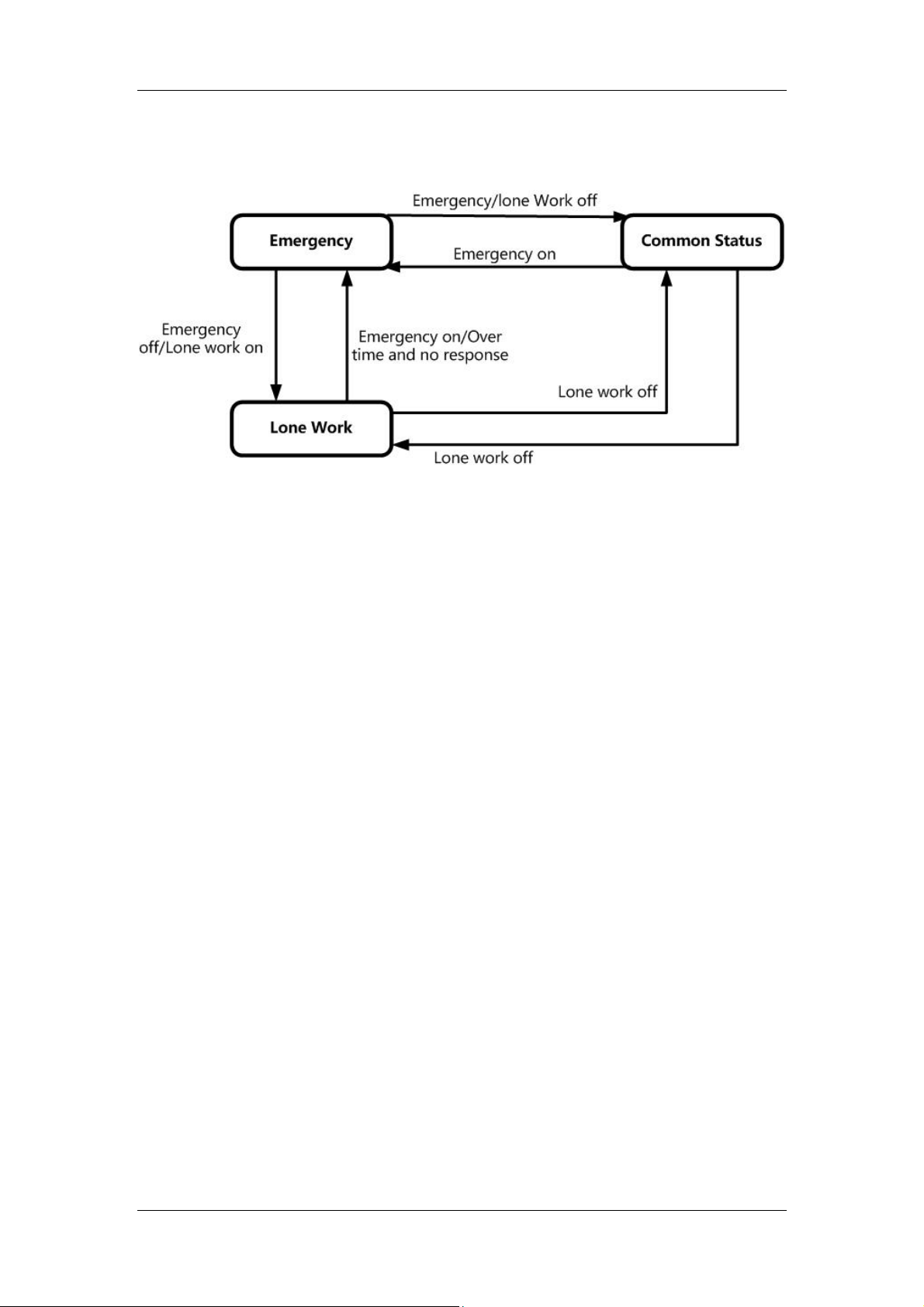
Lone Worker Process:
Figure 2.5.4-1: Lone Worker Process
Hytera DMR System Planner
2.5.5 Man Down
Man Down emergency is also used to protect you. When the radio tilts for over the
predefined time, it will trigger the emergency alarm automatically. This feature is
designed for users (such as police, firefighters, miners, etc.) in dangerous
workplaces.
The principle of this feature is that the gravity sensor built in the radio will sense the
tilting gradients. When the gradient is sensed over the preset value, the emergency
alarm feature will be activated. When the radio stays over the preset gradient for
the preset delay time, it will transmit the emergency alarm. If the radio is placed
upright during the alarm, it will quit from the alarm after another preset delay time.
Like Lone Worker, Man Down has Pre-Alert Time before the emergency alarm.
Within this period, if you place the radio upright, the radio will not transmit the
emergency alarm.
Compared with Lone Worker feature, Man Down feature is more sensitive and timely,
and it spends shorter time before triggering the alarm, while Lone Worker will wait at
least 1min before triggering the alarm. The Man Down feature is more suitable to
users in dangerous workplaces. However, more mistaken alarms may be sent by
radio with this feature than Lone Worker. Thus, it is more important to set the
reasonable emergency entry delay time and tilting gradient for the Man Down
feature.
34
Page 39

Hytera DMR System Planner
As the Man Down feature is more sensitive and timely to send emergency alarms, it
should be used in appropriate occasions and defined reasonably. To use this feature,
you need to configure its parameters via the CPS. The Trig Entry Delay Time is used
to set the time period for activating the emergency alarm. You should set it based on
actual requirements. In very dangerous place, you need to set the time shorter so
the radio will be more sensitive for alarm triggering. You can also set the Trig Exit
Delay Time to define the time period before which the emergency mode is quited.
Like the Lone Worker feature, Man Down is also an expanded emergency feature.
You can configure this feature via the CPS only. If you want to activate or inactivate
the feature through the radio, you must select “Man Down” option in “Menu” in the
CPS. You can assign the programmable key with Man Down feature, so you can
activate or inactivate the feature by pressing the key. Besides, you can also set the
feature to be activated automatically via the CPS. You can use any of the aforesaid
three ways to activate this feature.
Man down Process:
Figure 2.5.5-1: Man Down Process
35
Page 40

Hytera DMR System Planner
2.6 Scan
With the Scan feature, the radio can detect the communication activities on other
channels and select the channel for staying on according to the scan result. After
you start the scan of the radio via the programmable key or radio menu, the radio
will scan the activities on the preset channels circularly in order. When detecting
some activities that you are interested in on a channel, the radio will pause on that
channel until the Hang Time is up. Then the radio will continue detecting the
channels repeatedly until it quits the Scan mode. Hytera DMR scan supports both
digital channels and analog channels.
The Scan feature shall be activated in the following conditions:
The “Scan List” parameter in “Channel” cannot be set to “None”;
There are at least two channels in the Scan List, or you cannot activate the
feature.
When the conditions above are all fulfilled, you can also select the Auto Scan
feature for a channel, so when you switch the radio to the preset channel, the Auto
Scan will be activated. When scanning, the radio will stay on an active channel for
some time before it scans another channel, so as not to miss the activity detection.
You can set the time for staying (Hang Time) via the CPS.
There are some scan statuses:
Scan: The radio detects the activities on the channels, listed in the Scan List, in
order.
Stay: If there are some communication activities that satisfy the requirements
on staying on a channel, the radio will stay on that channel until the Hang Time
is over. Then it will continue to scan other channels.
Sweep: When the radio stays on a low-priority channel, the priority channel
Sweep Time will alert the radio to detect the high-priority channel. When there
is active signal detected on the priority channel, the radio will jump to it
immediately; in case of no signal detected, the radio will stay on the current
channel.
Suspend: During scanning the analog channels, you can enter or quit this
status by pressing the programmed Monitor key or Squelch Off key. In this
status, the radio can sweep the priority channels.
Terminate: When the radio receives the special code such as the emergency
code, it will terminate the scan. It will stay in this status and not scan or sweep.
Off Hook: This status occurs only in mobile radio scan. The scan process is
affected if the microphone is off the hook.
36
Page 41

Hytera DMR System Planner
The radio may need to transmit during the scan, while the stayed channel, selected
channel, last active channel and frequently used channel are different channels.
Thus, you need to designate a transmitting channel for the radio. During the
transmission when scanning, you may need to call on the current channel, or
respond to the detected voice on the stayed channel, or call a user on the frequently
used channel. To meet your needs, Hytera DMR provides the Scan Tx Mode
configuration in the CPS, so you can designate a channel for the transmission
during the scan. You can have the following configurations:
Selected Channel: to transmit on the current channel.
Last Active Channel: the channel the radio stayed on last time.
Designed Channel: to transmit on the specified channel.
If the Talkback feature is enabled, when the radio is staying on a channel, it will
transmit on that channel rather than the preset channel in Scan Tx Mode. If the radio
is scanning, it will transmit on the preset channel in Scan Tx Mode. If sweeping the
priority channel, it will go back to the stayed channel before the sweeping to
transmit.
If some mismatching signals are detected during scan, the system will mark the
channel. And the radio will only detects whether a carrier is present on the marked
channel during next scan process. If a carrier is present on the marked channel, the
counter increases a step, and the radio will go to the next channel for detecting.
Otherwise, the counter resets and the radio will check all conditions next time. If the
counter counts up to ten (10), the radio will clear this mark and check all conditions
next time. This feature is defined via the CPS. Even if the feature is not set, the radio
will still check all conditions of the channel and stay on it for some time. This feature
is used to save the scan time. The scan may take a long time. To those channels
with mismatching signals, the system will still scan and stay for some time. In deed,
the time can be saved in the way that the system marks such channels and simply
scan them next time and skip to other channels.
Hytera DMR scan provides Priority Channel Sweep function. During the scan,
missed detection of some channel activities is inevitable. To avoid missing detecting
the activities on some high-priority channels, the system can be timed to return to
the priority channel for scan.
When the radio detects the active channel, it will stay in the channel. And it will
sweep a higher-priority channel. When there is active signal detected on the priority
channel, the radio will jump to it immediately; in case of no signal detected, the radio
will stay on the current channel. To use the Priority Channel Sweep function, you
simply need to set the sweep time according to the urgency. The sweep time range
37
Page 42

Hytera DMR System Planner
is: 0.5s to 7.5s. The shorter the set time, the faster the radio will return to the first
channel for scanning, and the more the scanning of the priority channel. Thus the
detection to the first channel activities will not be missed.
Off Hook Scan is only available for mobile radios. With this feature enabled, when
you pick up the microphone, the scan will be paused; if the feature is disabled, the
scan will not be affected when you pick up the microphone.
2.6.1 Scan List
The radio will scan channels in accordance with the Scan List. When scanning
channels, the radio will detect the activities on the channels. When a valid activity is
detected on a channel, the scan will pause and the radio will stay on the channel
until the end of the Hang Time, and then the radio will continue to scan.
The Scan List can contain the analog channel and digital channel; a channel can be
increased to both a single scan list and multiple scan lists. You can add or delete the
channel(s) in the scan list via the CPS or the radio menu, and you can edit the
channel(s) via the CPS. Similarly, a radio can have a scan list and contain a plurality
of scan lists. The system has a scan list by default. If you need to enable the scan
function, you must set a scan list for the radio via the CPS.
Scan is a channel associating feature. You must set a scan list prior to enabling this
feature. You can set the Auto Start Scan feature for a channel via the CPS or start
scan manually after you define the scan list.
During the scan, some frequently used channels or important channels need
frequent scan. You will need to pay more attention to these channels and give them
prior scan. Via the CPS, you can define at most two priority channels. The priority
channels have totally 50% more chances to be scanned, so each of the two
predefined channels share 25% of the chances.
38
Page 43

Hytera DMR System Planner
2.6.2 Scan Stay Condition
The radio detects the signal and determines whether to stay on the channel during
scanning.
The CTCSS/CDCSS can be set as the scan stay condition for the analog channel.
Generally, the voice transmission on the analog channel is accompanied by the
CTCSS/CDCSS. If no CTCSS/CDCSS is detected on a channel, it means there are
no activities on the corresponding channel. The radio will skip such channel, thus
reducing the scanning time. For the digital channel, the CTCSS/CDCSS can also be
set as the scan stay condition.
The CTCSS/CDCSS scan modes include:
Disabled: The radio will not detect CTCSS/CDCSS during scanning.
Non-priority Channel: The radio will detect CTCSS/CDCSS while scanning the
non-priority channel.
Priority Channel: The radio will detect CTCSS/CDCSS while scanning the
priority channel.
Priority and Non-priority Channel: The radio will detect CTCSS/CDCSS while
scanning any channel in the scan list.
If the radio has detected activities on an analog channel, it will determine whether to
stay on such channel, according to the squelch mode for the current channel and
the scan mode for the used scan list. After staying on this channel, the radio will
determine whether to play the voice on the channel, according to the stay condition.
For details, see the table below:
Squelch Mode Scan Mode Stay Condition
CTCSS/CDCSS is detected Carrier+CTCSS/CDCSS
CTCSS/CDCSS
If the radio has detected activities on a digital channel, it needs to detect carrier,
synchronization code and color code. If they match, the radio will stay on such digital
channel. The ID includes the individual ID and group ID. Currently, the data services
such as GPS service and remote monitoring service are not considered as the scan
stay condition for our DMR radio.
CTCSS/CDCSS is not
detected
CTCSS/CDCSS is detected Carrier Carrier
CTCSS/CDCSS is not
detected
Carrier
Carrier
39
Page 44
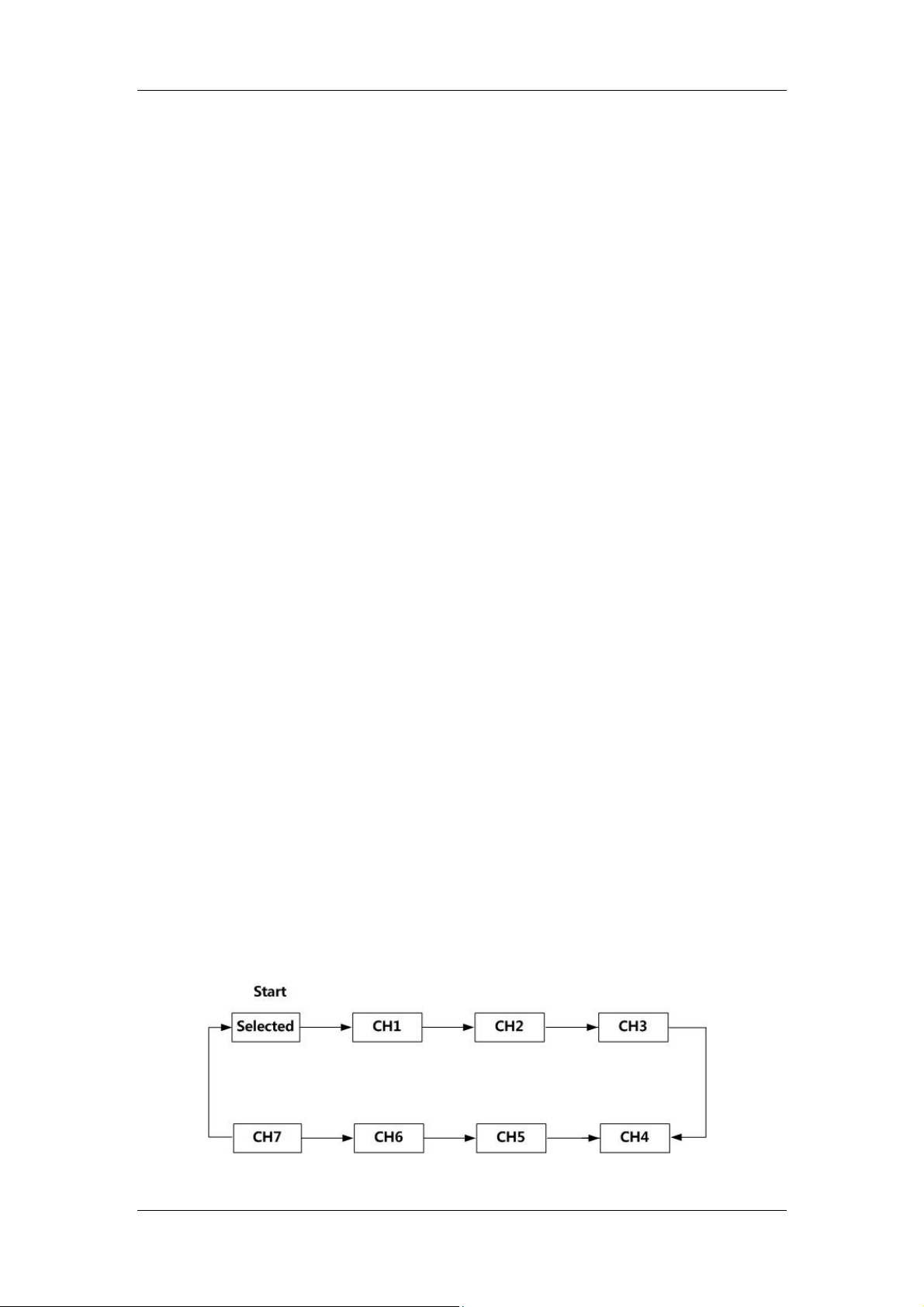
Hytera DMR System Planner
2.6.3 Channel Scan Order
The scan list can be edited via the radio menu or the CPS, to change the channel
order in the channel list and to set the priority scan channel.
Pay attention to the following information while editing the scan list:
Make sure the Selected channel refers to a channel different from the other
channels in the scan list. Otherwise, the radio will skip the Selected channel
during scanning.
Both the analog channels and digital channels can be added into the same
scan list. The analog channels and digital channels are scanned separately.
After editing, a new scan list is generated. If the scan list is selected as the current
scan list, the radio will scan channels according to this list.
Supposing the channels in the current scan list are in this order (Selected, CH1,
CH2, CH3, CH4, CH5, CH6 and CH7), the radio will scan channels in the following
orders:
2.6.3.1 No Priority Scan Channel
Scenario 1: The scan list contains either the digital channels or analog channels
only.
If the Selected channel refers to a channel different from the other channels in
the scan list, the channels in the scan list will be in this order: Selected, CH1,
CH2, CH3, CH4, CH5, CH6 and CH7.
If the Selected channel refers to the same channel as CH1 does, the channels
in the scan list will be in this order: CH1, CH2, CH3, CH4, CH5, CH6 and CH7.
The radio scans channels according to the channel order in the scan list. If the
channels in the scan list are in this order (Selected, CH1, CH2, CH3, CH4, CH5,
CH6 and CH7), the radio will scan channels in the order as shown below:
40
Page 45
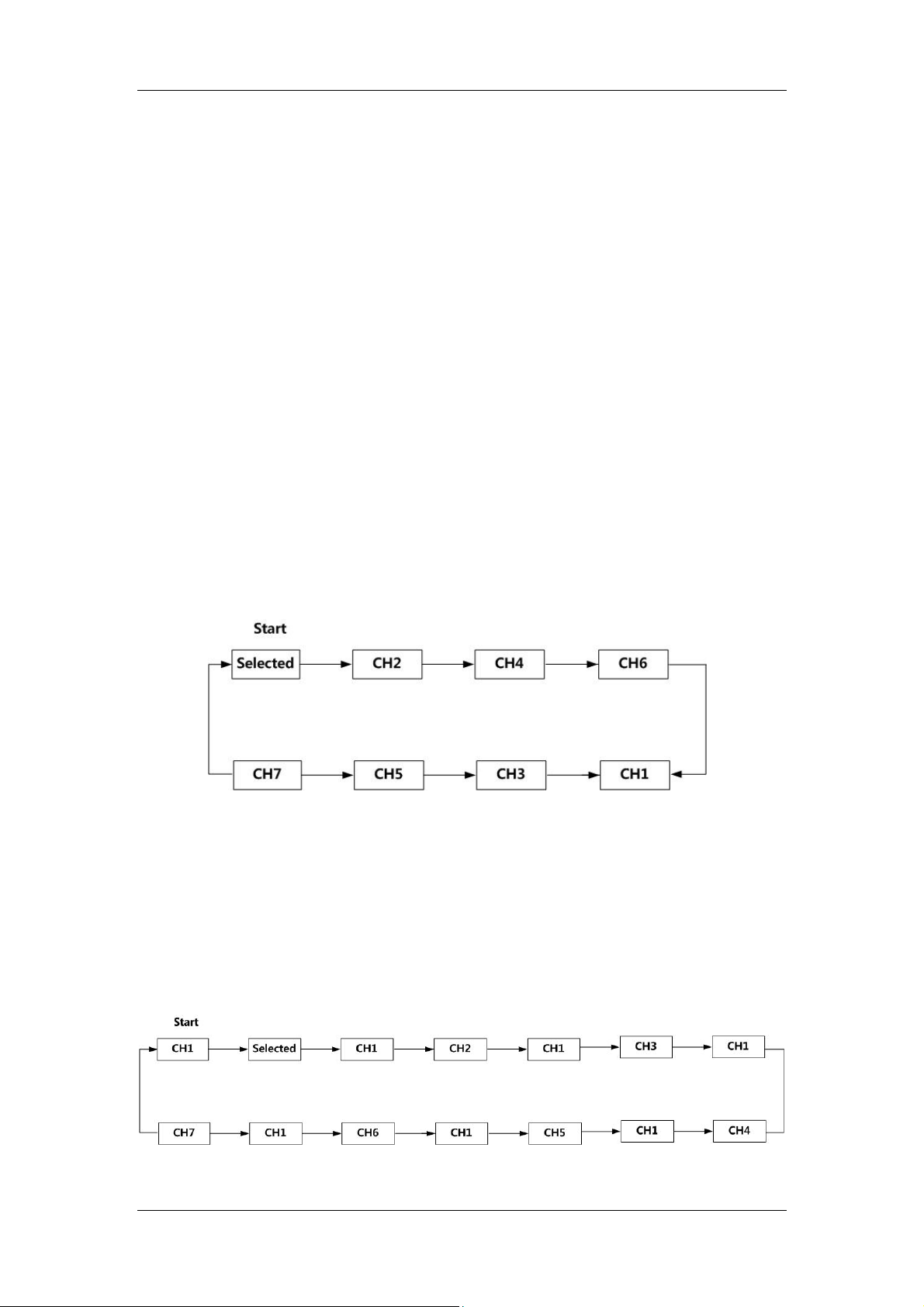
Hytera DMR System Planner
Scenario 2: The scan list contains both the digital channels and analog channels.
For example, CH1, CH3, CH5 and CH7 are digital channels, and CH2, CH4 and
CH6 are analog channels.
If the Selected channel is an analog channel and refers to a channel different
from the other channels in the scan list, the channels in the scan list will be in
this order: Selected, CH2, CH4, CH6, CH1, CH3, CH5 and CH7.
If the Selected channel is a digital channel and refers to a channel different from
the other channels in the scan list, the channels in the scan list will be in this
order: CH2, CH4, CH6, Selected, CH1, CH3, CH5 and CH7.
If the Selected channel is a digital channel and refers to the same channel as
CH1 does, the channels in the scan list will be in this order:: CH2, CH4, CH6,
CH1, CH3, CH5 and CH7.
If the Selected channel is an analog channel and refers to the same channel as
CH2 does, the channels in the scan list will be in this order: CH2, CH4, CH6,
CH1, CH3, CH5 and CH7.
The radio scans channels according to the channel order in the scan list. If the
channels in the scan list are in this order (Selected, CH2, CH4, CH6, CH1, CH3,
CH5 and CH7), the radio will scan channels in the order as shown below:
2.6.3.2 One Priority Scan Channel
Supposing only CH1 is set as the priority scan channel, the channels in the scan list
will be in this order (Selected, CH1, CH2, CH3, CH4, CH5, CH6 and CH7), no
matter whether they are analog channels or digital channels.
Then the radio will scan channels in the following order:
41
Page 46
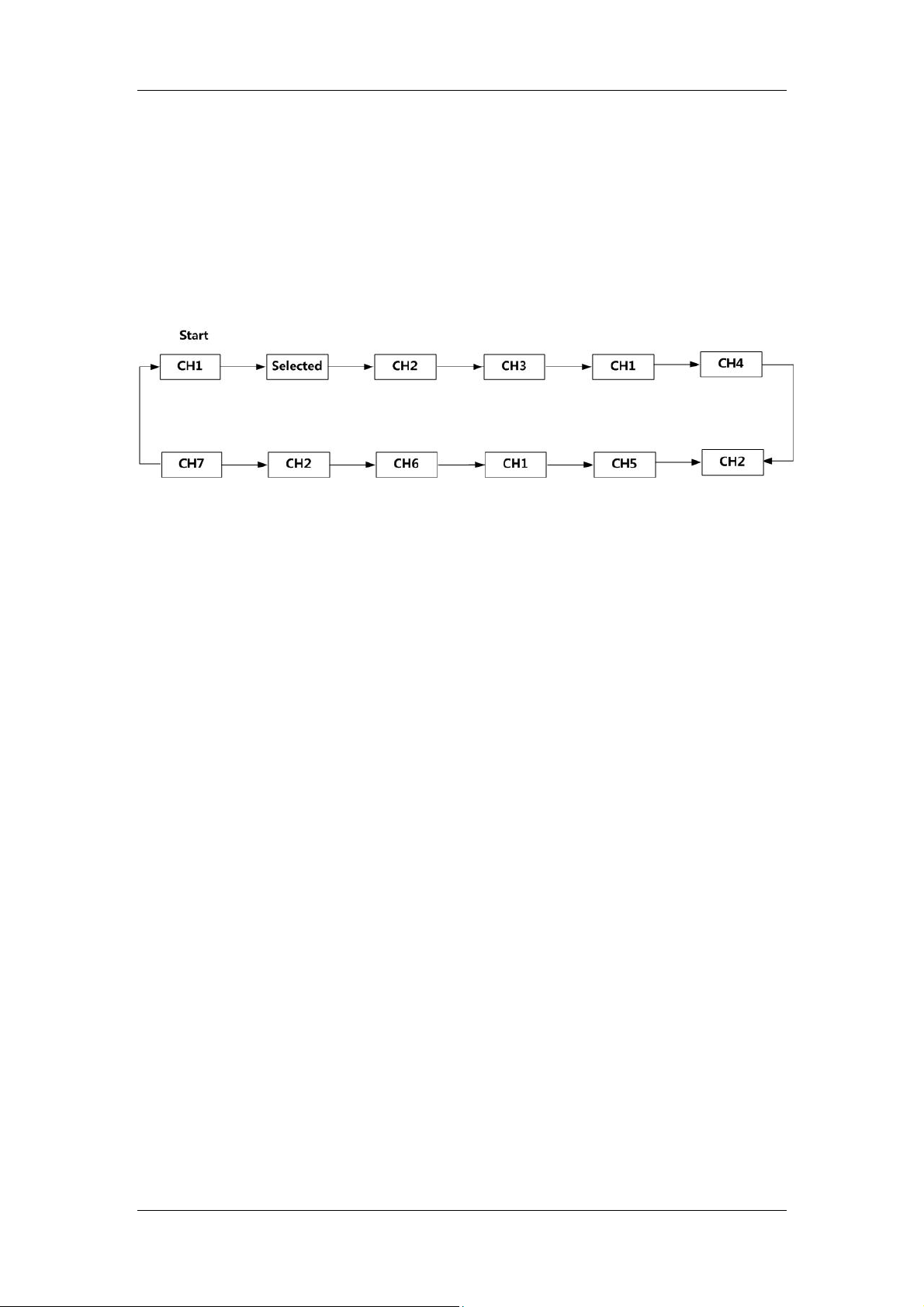
Hytera DMR System Planner
2.6.3.3 Two Priority Scan Channels
Supposing CH1 and CH2 are set as the priority scan channels, the channels in the
scan list will be in this order (Selected, CH1, CH2, CH3, CH4, CH5, CH6 and CH7),
no matter whether they are analog channels or digital channels.
Then the radio will scan channels in the following order:
42
Page 47

Hytera DMR System Planner
2.7 Roaming
Roaming is a function, which allows mobile terminals to move between sites in the
IP Multi-site Connect system without dropping connection. It is fully automatic to
users.
The Roaming feature, mainly used in the IP Multi-site Connect system, can bring
users seamless communication within the area covered by multiple repeaters.
Hytera DMR digital terminals are capable of auto roaming from one site to another
within the IP Multi-site Connect system.
A roam list can be configured to the mobile terminal. It contains a series of channels,
each of which is corresponding to a repeater in the IP Multi-site Connect system
(namely, a wide area channel). When the Roaming feature is enabled, the mobile
terminal will keep detecting the signal strength of each channel in the roam list,
select one with the strongest signal and regard it as the master site. Then the mobile
terminal will stay on this site. Once its signal strength falls below the
pre-programmed RSSI threshold value, the mobile terminal will try to find a new
master site. If a better site is not found, it will still identify the previous master site as
its own master site.
Note: The terminal cannot roam when it is in a call.
If there is no activity in the IP Multi-site Connect system, e.g. no voice or data
service transmitting, the beacon configured for the repeater will be sent
automatically. Once the terminal finds which master site is idle, it will wait for this
beacon and detect its signal strength, measuring the coverage of the site and
determining the relation between the terminal and the site. If no voice, data service,
or the beacon has been received in the expected duration, the mobile terminal will
be deemed to exceed the coverage of the master site and attempt to search for a
new master site.
As the Roaming function can be enabled or disabled via the programmable keys or
the menu, the users can not only control when and where the mobile terminal roams,
but also disable this feature to a specific site, or keep roaming to choose a proper
site.
During roaming, voice or data service is initiated, which fails to activate the repeater
at the master site at times. In this case, the terminal will search sites in the roam list
and select an appropriate one to make a call. If the right site is not found, the
out-of-range message will be given. To manually change the site, users can rotate
the Channel Selector knob to the desired channel. Then the mobile terminal always
begins to roam from this channel.
43
Page 48

Hytera DMR System Planner
When the mobile terminal is roaming, the corresponding status icon and the master
site (channel) alias will be displayed on the LCD. Also you can determine whether
the terminal is searching or staying on the site with the help of the LED.
2.7.1 Roaming Methods
The type of roaming method includes auto site roam and active site roam.
2.7.1.1 Auto Site Roam
If the Roaming feature is enabled and the signal strength value of the current
channel falls below the pre-programmed RSSI threshold, the mobile terminal will
keep detecting the signal strength of each channel (site) in the roam list, select one
with the strongest signal, and regard it as the master site. Afterwards, the mobile
terminal will stay on this site. Once the signal strength of the master site falls below
the RSSI threshold, the mobile terminal will try to find a new master site. If a better
site is not found, it will still identify the previous channel as its own master site. If the
mobile terminal comes across other activities while performing the auto site roam, it
will identify the current repeater as the master site. In addition, all sites in the roam
list will be ranked according to their signal strength, so as to achieve better roaming
performance. Sites that have been detected in previous roam and are assumed to
be near by are searched before those that have not been detected before.
Additionally, when the mobile terminal is roaming, it will detect the current master
site during the interval of checking other two sites, to minimize the duration away
from the master site. This strategy gives the priority to the previous master site and
minimizes the possibility of missing transmissions in the process of roaming.
When the auto site roam is initiated, the mobile terminal will be temporarily away
from the master site and detect other sites. In this case, it may miss the
communication with the master site. In other words, auto site roam shall occur when
the mobile terminal is so far from the master site that its signal strength had
deteriorated below the RSSI threshold or when there is no signal at all.
Both the activation of auto site roam and site selection are subject to the repeater
transmission. If there is no activity in the system and the repeater stops transmission,
auto site roam can not detect any repeater. Consequently, the repeater can be
configured to send the beacon periodically in case of no transmission and
interference. Both the beacon duration and interval can be set.
In the event of no activity in the system, the mobile terminal will use the signal
strength of the beacon to determine whether it is required to roam and which site it
should roam to. If the mobile terminal does not receive the beacon within the interval,
it is deemed to be out of the repeater’s range and roams to another site.
44
Page 49

Hytera DMR System Planner
Auto site roam is not triggered by one of the following events:
The mobile terminal is transmitting
The mobile terminal is receiving a call or data service
The mobile terminal is in Emergency mode
The mobile terminal is in good coverage
The mobile terminal is operating in Talk Around mode
The mobile terminal is killed
The mobile terminal is monitoring remotely
The menu of the mobile terminal is active
The mobile terminal operates on the channel with a scan list
2.7.1.2 Active Site Roam
With the active site roam enabled, if the user presses the PTT or the emergency key,
or the message is sent, the mobile terminal will first try to wake up the repeater on
the current channel. If a repeater is not available, the mobile terminal will repeat this
process for each member in the roam list till an active one (site) is found. Afterwards,
the mobile terminal will synchronize itself with this active repeater, finish the
transmission and identify it as the master site. If the entire roam list is searched and
no site is found, a failure indication will be provided to the user.
The active site roam will occur when the mobile terminal initiates a call but the
corresponding repeater on the current channel is not waked up.
This entire process of discovering and synchronizing with an active repeater
increases the voice access time of the transmission (time from PTT press to Talk
Permit Tone). But this increase only takes place in the first transmission, as the later
transmission will perform normally on the new site.
Note: the wake-up message is always sent politely. This indicates that if the mobile
terminal detects the inference signal, it will not send this message to members in the
roam list. But it will carry on the active site roam according to the next roam list.
Note: the mobile terminal does not perform any auto site roam in emergency mode.
No auto roaming will occur when the mobile terminal is reverted during the
emergency. However, when configured to revert emergency channel and with the
active site roam enabled, the mobile terminal will perform the active site roam
automatically, if the signal strength of the repeater falls below the pre-programmed
RSSI threshold, or no repeater beacon is detected.
Please note that the wake-up message caused by the active site roam will be
transmitted to each member’s frequencies in the roam list till the available site is
found. But the active site roam will not occur in the area where frequency
overlapping and sharing is common. In order to minimize the unnecessary
transmission, the mobile terminal only sends one piece of wake-up message politely.
If this is not acceptable, the active site roam shall be disabled and the beacon be set
45
Page 50

Hytera DMR System Planner
as short as possible. This ensures that the auto site roam finds a new site rapidly
and disallows the user to initiate the active site roam.
Note: roaming will not occur in the emergency mode if the active site roam is
disabled.
2.7.1.3 Configuring the Roam List
It must be noted that a system contains more than one IP Multi-site Connect system,
namely, a wide area system. In general, a wide area system comprises one or
multiple wide area channels, each of which is a separated voice path. Hence, the
user only needs to configure the required wide area channel to the roam list.
You can refer to IP Multi-site Connect Application Notes for details about the wide
area system.
It is necessary to store the required site into the roam list. This list shall contain a
logic channel, which includes the frequency pair, color code and time slot
combination.
It is important to understand that when the mobile terminal determines a new master
site to be a member in the roam list, only the logical attributes in this list are utilized
and other attributes are used from the selected channel personality.
The following logic attributes of the master site shall be utilized:
Transmit frequency and transmit reference frequency
Receive frequency and receive reference frequency
Color code
Time slot
Talk Around setting
GPS Revert channel
Emergency (include Emergency Revert Channel)
More attention shall be paid to GPS revert and emergency revert. Because the
logical channels for each site are different, the revert channels must be changed
when the mobile terminal roams from one site to another. We recommend that
emergency configurations for all channels should remain the same within a roam list.
Otherwise, the mobile terminal may perform an emergency differently when it moves
from one site to another.
The remaining attributes, such as Transmit and Receive Group List, Channel
Access, etc, should be utilized from the currently selected channel, no matter which
site the mobile terminal currently roams to. Preferably, the attributes of these
parameters in the roam list shall keep the same, so that the mobile terminal
operates consistently no matter whether it roams to the channel or the user selects
the channel.
46
Page 51

Hytera DMR System Planner
2.7.2 Configuring the RSSI Threshold
The RSSI Threshold is a configurable parameter via the CPS. If the signal strength
of the current master site is above the specified RSSI threshold, the terminal will
stay on the site and will not roam. Once the signal strength falls below the threshold,
the auto site roaming will occur to search for a site with higher signal strength. This
parameter actually controls the distance away from a site a user will begin searching
for another site. The RF coverage is not a perfect circle in reality, but to simplify this
explanation, we regard it as a circle.
Please note that the terminal will temporarily leave the current master site to
determine whether a stronger site is available during auto site roaming. Since the
terminal is temporarily away from the master site, it may miss the beginning of a
transmission (i.e. late entry into a call). Therefore, it is not advisable to perform auto
site roaming all the time. The RSSI threshold should be set properly. If it is too low,
the terminal will always stay on the master site with low signal strength even if there
might be a better site available; if it is too high, the terminal will frequently roam and
cause late entry. The figure below illustrates the situations when the RSSI threshold
is set too high or too low. Strong signals exist in the area circled by the dotted line,
and terminals can roam in the light blue area. The RSSI Threshold value ranges
from -120dBm to -80dBm.
Figure 2.7.2-1:Roaming Triggered by RSSI Threshold
The default value is -108dBm, which indicates approximately 80% of the good
coverage. Therefore, roam will occur in the left 20% of the coverage. The default
value is ideal for most configurations, but may not be the best in some particular
configurations. Accordingly, the user must take the actual site configuration into
47
Page 52

Hytera DMR System Planner
account before setting the RSSI threshold. Generally, the following four site
configurations are available for your reference.
2.7.2.1 Overlapping coverage
This scheme is designed for a large city or an area where a large population is
present. It involves a number of sites and much overlapping coverage. In the
overlapped areas, multiple frequencies are used, while the non-overlapped areas
share frequencies, but different color codes are required for roaming service. In
some cases, a user may be within coverage of three to four sites at the same time,
and it takes about 10 minutes to move from one site to another.
TX=F1
TX=F1
RX=F2
RX=F2
CC=1
CC=1
TX=F3
TX=F3
RX=F4
RX=F4
CC=3
CC=3
TX=F5
TX=F5
RX=F6
RX=F6
CC=2
CC=2
TX=F1
TX=F1
RX=F2
RX=F2
CC=4
CC=4
Figure 2.7.2.1-1:Overlapping Coverage
2.7.2.2 Non-overlapping coverage
This scheme is designed for the countryside or a single part of a small city. It
involves multiple separate sites and no overlapping coverage is present. The
non-overlapped areas share frequencies, but different color codes are required for
roaming service. With this scheme, a user may be within coverage of one site at the
same time, and it takes several hours to move from one site to another.
48
Page 53
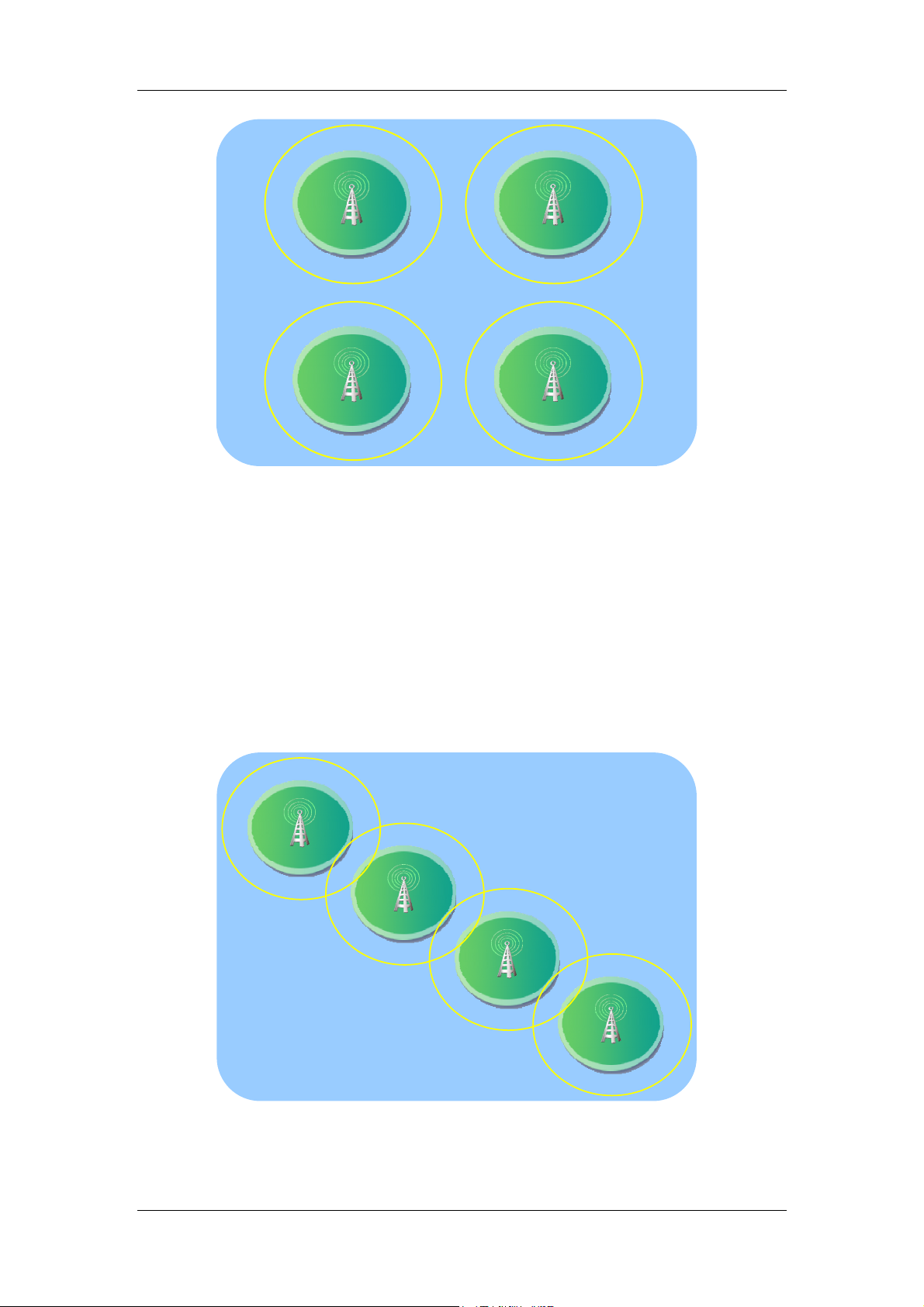
Hytera DMR System Planner
TX=F1
RX=F2
CC=1
TX=F3
RX=F4
CC=3
TX=F1
RX=F2
CC=2
TX=F1
RX=F2
CC=4
Figure 2.7.2.2-1:Non-overlapping Coverage
2.7.2.3 Linear coverage
This scheme is designed for communication services along the road, railway, river or
coastline. It involves multiple sites and overlapping coverage is present on a small
scale. The overlapped areas share frequencies, but different color codes are
required for roaming service. With this scheme, a user may be within the coverage
of one or two sites at the same time, and it takes about an hour to move from one
site to another.
TX=F1
RX=F2
CC=4
TX=F3
RX=F4
CC=3
TX=F1
RX=F2
CC=2
Figure 2.7.2.3-1:Linear Coverage
49
TX=F5
RX=F6
CC=1
Page 54

Hytera DMR System Planner
2.7.2.4 Multilayer coverage
This scheme is designed for a high-rise building or a deep well. It involves multiple
sites standing close from each other and overlapping coverage is present on a large
scale. Since the coverage of each site is limited due to unfavorable geology
conditions, frequency reuse is seldom available, and quick signal attenuation occurs
frequently. However, different color codes are required for roaming services. With
this scheme, a user may be within the coverage of one or two sites at the same time,
and it takes about 1 minute to move from one site to another.
TX=F1
TX=F1
RX=F2
RX=F2
CC=1
CC=1
TX=F3
TX=F3
RX=F4
RX=F4
CC=2
CC=2
TX=F5
TX=F5
RX=F6
RX=F6
CC=3
CC=3
TX=F7
TX=F7
RX=F8
RX=F8
CC=4
CC=4
Figure 2.7.2.4-1:Multilayer Coverage
To set the RSSI threshold, the actual site configuration must be considered. For
example, the threshold can be set to the lowest value (-120dBm) for
non-overlapping coverage, because the terminal does not need to roam as long as it
is within the coverage. For multilayer coverage, the threshold can be set a higher
value. In this way, the terminal can search for stronger sites. The table below lists
reference values for the four typical site configurations. In actual applications, a
combination of site configuration may be used. Therefore, the system designer
should take all configurations into consideration and set an appropriate value.
Site Configuration Recommended
RSSI threshold
% of Outer Range Radio Will
Roam
Non-overlapping Coverage -120dBm 0
Linear Coverage -110dBm 10%
Overlapping Coverage -108dBm 20%
Multilayer Coverage -102dBm 50%
50
Page 55

Hytera DMR System Planner
Please note that the above RSSI thresholds assume the outbound and inbound RF
coverage of the system is balanced. In other words, when the terminal is within good
outbound coverage of the repeater, the terminal’s inbound transmission can reach
the repeater. As the roaming algorithm uses outbound transmission to decide when
to roam, the terminal cannot roam in an unbalanced system even though it cannot
reach the repeater. In this way, the transmission from the terminal cannot reach the
repeater and so cannot be repeated.
The solution to this problem is to reduce the outbound TX power of the repeater, so
as to shorten the outbound coverage. In this way, the terminal can send successfully
as long as it can receive successfully. If reducing the outbound TX power is not
desirable, set the RSSI threshold to a value higher than the recommended one, to
force the terminal to roam even within good signal coverage. The threshold may be
different for portable terminals and mobile terminals because they have different TX
power and therefore different inbound coverage. The portable terminal may need a
higher RSSI threshold than the mobile terminals.
Please note that each roam list is configured with a threshold value. This means if
unbalance exists in one site rather than in the other site, it may be difficult to find an
appropriate threshold value for both sites.
2.7.3 Setting Beacon Duration and Beacon Interval
If no activity is present in the system, the repeater will go to the sleep state. In this
case, the terminal cannot detect signal strength via auto site roaming, preventing
from selecting the strongest site. For this reason, the repeater should be configured
to send beacons when no activity or interference is present in the system. During
such period, the terminal decides when to roam in accordance with the strength of
the beacon. If it does not receive any beacon within a predefined period, it will
suppose that it is out of the coverage and start roaming.
The beacon duration and beacon interval are configurable via the CPS. The former
can be configured in the repeater only, while the latter can be configured in the
repeater and the terminal.
The beacon duration depends on the number of sites in the system and therefore in
the roam list, while the interval depends on how quickly the terminal roams to
another site.
The ratio of the beacon duration to the beacon interval equates to how often the
repeater transmits (i.e. beacon transmission ratio) in the case of no inbound
activities. This ratio is not configured for the system directly, but it is an important tip
for setting the beacon duration and beacon interval. On a shared frequency, the
transmission ratio for beacons should be kept low (target ratio: 5%-10%). In other
words, the beacon interval should be increased accordingly if the beacon duration is
51
Page 56

Hytera DMR System Planner
increased.
If the beacon duration is very short, it may be difficult for the terminal to detect it.
This is especially true if there are more sites. If the terminal detects a specific site at
longer intervals, it is more likely for the terminal to miss the beacon. Typically, a user
is within the coverage of no more than four sites at any given time. Therefore even
with a large roam list, most of the sites have no activity and can be detected quickly.
However, interference may occur if many sites share frequencies.
Note: The nearest site will be detected first because the sites are ordered in
accordance with signal strength in the roam list. If a user moves to a site that is not
visited recently, the first roam may take a long time. Once the site is detected, it will
be moved to the front of the roam list. To improve the possibility of receiving the
beacon, the beacon duration should be increased. It is safer to have a beacon
duration longer than shorter. Please note if the beacon duration is increased, the
beacon interval will accordingly be increased to satisfy the beacon transmission
ratio.
The beacon interval controls how quickly the terminal can roam to a site or away
from a site when no activity is present in the system. When roaming with no system
activity, the terminal needs a beacon to roam to a new site. If the repeater beacon is
sent every one minute, the terminal may be one minute deep into the site before it
sees the site and roams to it. Similarly, when roaming with no system activity, the
terminal may be one minute outside of the site before it attempts to roam. The
influence of this value often changes based on how quickly the user is traveling. For
example, a vehicle driving at 60 miles per hour can cover a mile a minute, and so
will be one mile into or out of a site before roaming. This is ideal for non-overlapping
coverage and linear coverage. For overlapping coverage, the beacon interval
should be shorter because the leaving and entering of sites should be quicker.
Please note that if a user transmits before the beacon is detected via auto site
roaming, the terminal will try to revive the site repeater.
A one minute beacon interval may be proper for walking users if the sites are not
very close like in the “Multilayer Coverage” example. In this case, a user in an
elevator may move fast between sites. The one minute beacon interval may be
improper, because it may be longer than the duration that the user needs to move
from the floor to the top. Hence, it is better to set the beacon interval to 20s. Please
note that the 5% beacon transmission ratio may not be achievable for a system with
multiple repeaters. In this case, the system designer may either decide to abandon
this target ratio since indoor coverage usually does not propagate very far, or
decrease the beacon duration. The table below lists recommended beacon
durations and beacon intervals (8% beacon transmission ratio) for a varying number
of sites. The default values for beacon duration and beacon interval are 4.32s and
60s respectively.
52
Page 57
Hytera DMR System Planner
No. of Sites Beacon Duration[s] Beacon Interval[s]
2 0.72 10
3 1.92 30
4 3.12 40
5 4.32 60
6 5.52 70
7 6.72 90
8 7.92 100
9 9.12 120
10 10.32 130
11 11.52 150
12 12.72 160
13 13.92 180
14 15.12 190
15 16.32 210
If shared use is not a problem in the customer’s region, the beacon transmission
ratio becomes less important. And it may be desirable to increase the beacon
duration and decrease the beacon interval. If the automatic Active Site Roam is
disabled, it is recommended to decrease the beacon interval as much as possible,
because the terminal finds sites based on the beacon only.
53
Page 58

Hytera DMR System Planner
2.7.4 Performance while Roaming
Please note that roaming may cause performance degradations. Therefore, the
RSSI threshold and the terminal’s Site Lock must be set appropriately when not in
mobile status. The degradations are similar to what the terminal will experience
during scanning. Degradation may occur in the following:
Late entry to voice transmission
Longer preamble required for control message and data
Increased setup time for Confirmed Private Call
Group Call Time to Talk Permit may increase if auto site roaming is required
During roaming, the terminal will temporarily leave the current home channel and
detect other sites (similar to scan). This means the terminal may not be present on
the master site when a call starts. After detecting every other site, the terminal will
detect the master site to minimize the time away from it. This is similar to the
scanning order for a priority member.
If the current master site cannot be revived, the terminal will try to locate another site
via the automatic active site roaming. When the terminal tries to revive other sites,
the user must wait. This increase in time will be recognized as an increase in the
time from PTT to receiving the Talk Permit Tone. This will not occur often if the
beacon interval for the repeater is appropriately set.
It is expected that the value that the Roaming feature adds is worth these
performance degradations. The beacon interval and the RSSI threshold should be
appropriately set to minimize the time the terminal needs to search for a site.
54
Page 59

Hytera DMR System Planner
2.8 Hytera Patented Features
2.8.1 Pseudo Trunk
Pseudo Trunk allows subscribers to work in Dual Time Slot mode. Thus, when one
time slot is busy, the subscriber will automatically switch to work at the other.
Usually, a channel has access to only one flow of voice signals or data
communication, which can’t satisfy multi-subscriber systems. Pseudo Trunk can
help such systems to optimize the use of the channel resources.
Pseudo Trunk is a function innovated by Hytera. This function is used to assign two
time slots dynamically in direct mode. When one slot is busy, the subscriber will
have communication on the other slot automatically. Thus, a channel can use two
time slots at the same time for two calls taking place with it. Pseudo Trunk realizes
the dual-time-slot work in the conventional system, and it also supports the dynamic
distribution of the time slots for communication transmission in Repeater mode.
DMR protocol adopts TDMA technology, dividing the 12.5 KHz channel into two time
slots, so that two users can share the same channel without interfering with each
other. In practice, however, in Direct mode the subscriber can only transmit signals
and data on one slot, which means that the other slot is wasted; in Repeater mode,
the subscriber can only transmit and receive signals and data on the designated slot,
disabling it to use the other slot as well. Hence, to make use of the unused slot will
greatly increase the frequency efficiency. This digital function manifests a big
advantage over analog technology.
Having been turned on, the subscriber will verify the activities of the current channel
before transmission. It will transmit on Slot 1 directly if this slot is free, otherwise, it
will switch to Slot 2 automatically. Once both slots are occupied, the subscriber will
determine whether to transmit on Slot 1 according to the settings at TX Admit under
CPS; In case of active analog carrier detected, the former situation shall apply.
Caution: once both slots are occupied, the subscriber’s forcible transmission will
interfere with the communications among other subscribers.
In Pseudo Trunk mode, you can prevent a slot from being occupied by designating
the specific conditions to enable it. Such designation will allow the subscriber to
transmit on the specific slot but will not affect the normal reception of data and voice
signals from any slot. By optimizing the use of channels, this feature makes the
communication system more orderly and manageable.
Pseudo Trunk only supports voice service, data service and auxiliary functions such
as alarm and radio disable.
55
Page 60
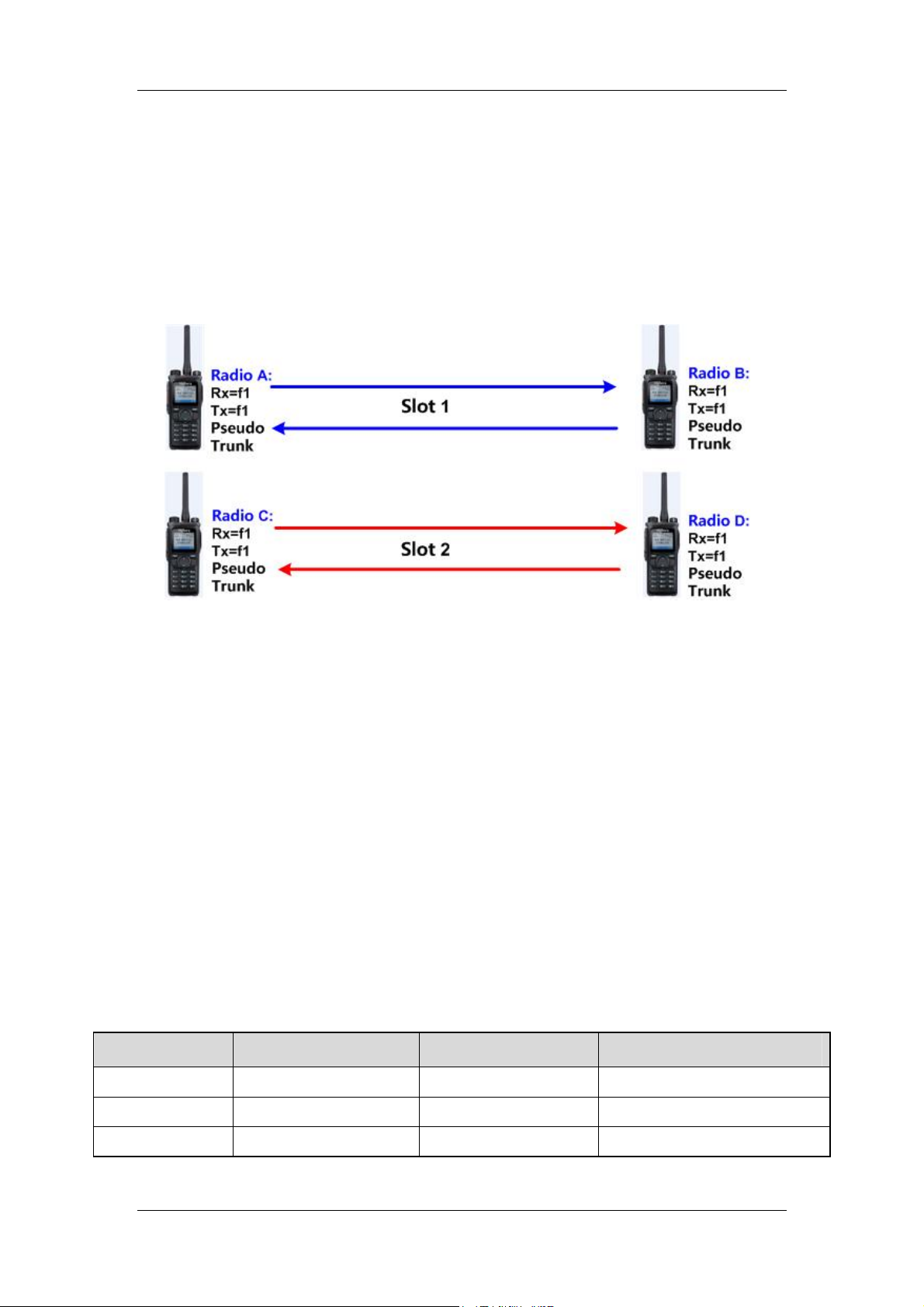
Hytera DMR System Planner
Application in Direct Mode
The bi-slotted operation is available in Direct mode once you have activated it on
your desired channel.
In Direct mode, Pseudo Trunk is usually applied in three instances:
There are only the subscribers which are using Pseudo Trunk function.
Figure 2.8.1-1:Pseudo Trunk Application in Direct mode 1
Before transmitting, Subscriber A will detect the activities in the channel. If the
channel is free, it will transmit on Slot 1 and will set up the communication here with
the receiver, Subscriber B. If Slot 1 is occupied, Subscriber A will transmit on Slot 2.
Then Subscriber B will receive A’s call and the communication is set up in Slot 2. If A
transmits again when the previous call is over, it will detect Slot 1 first and transmit
and establish the communication here when the slot is available. Once both slots
are occupied, the subscriber will have forcible transmission on Slot 1 according to
TX Admit settings.
When Slot 1 is occupied by the communication between A and B, Subscriber C will
detect Slot 2 after Slot 1, and establish the communication with Subscriber D on Slot
2 if this slot is free. If both slots are occupied, C will determine whether to have
forcible transmission on Slot 1 according to TX Admit settings.
See the details as follows for the situations mentioned above: See the details as
follows for the situations mentioned above:
TX Admit Entire Channel Free Only One Slot Free Entire Channel Occupied
Always allow Tx is allowed. Tx is allowed. Tx on Slot 1.
Channel free Tx is allowed. Tx is allowed. Tx is not allowed.
Color code free Tx is allowed. Tx is allowed. Tx is not allowed.
56
Page 61
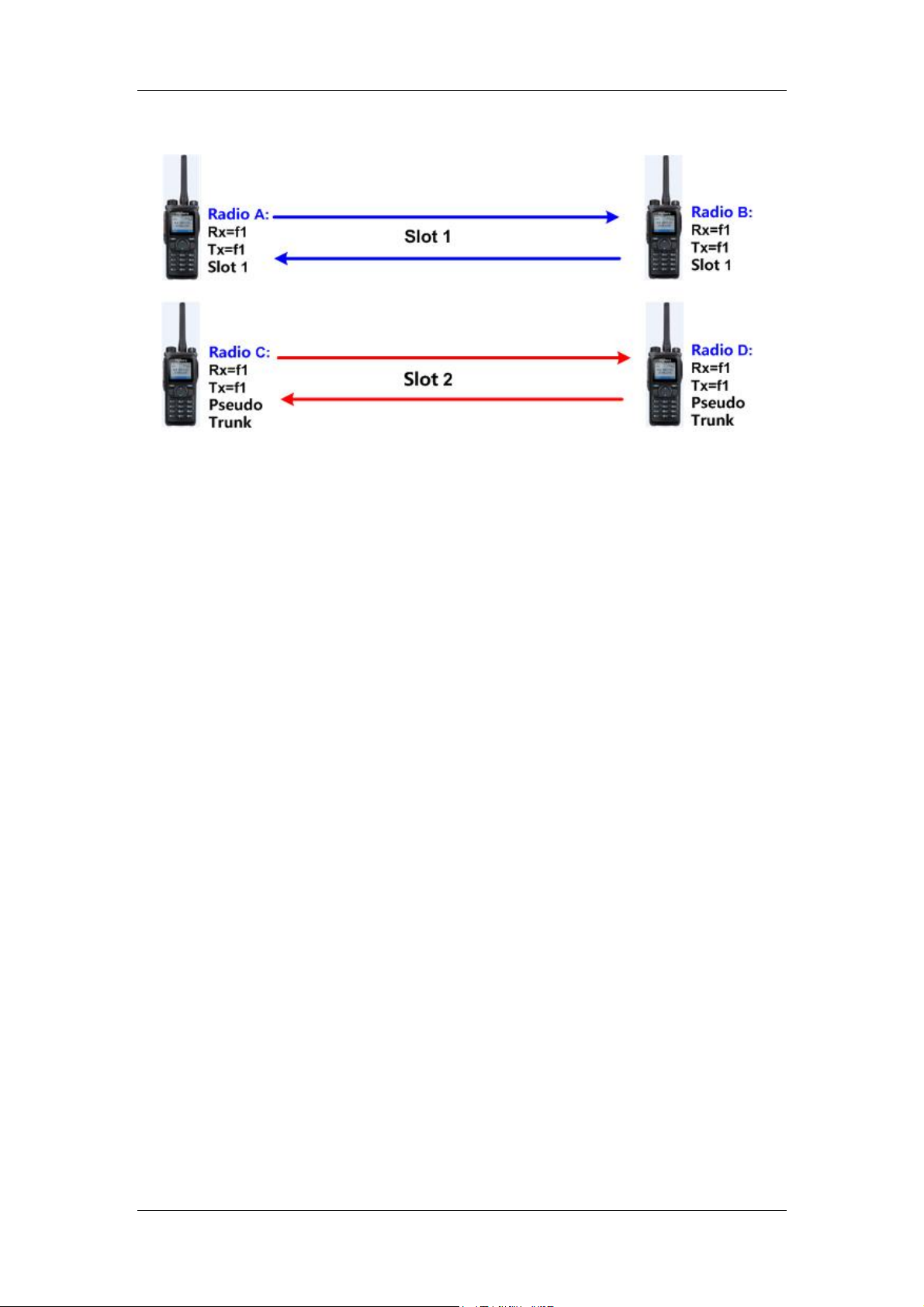
Hytera DMR System Planner
There are subscribers using Pseudo Trunk and a single time slot respectively.
Figure 2.8.1-2:Pseudo Trunk Application in Direct mode 2
Pseudo Trunk supports the communication with non-Pseudo Trunk subscriber,
which means that a subscriber with Pseudo Trunk can have normal communication
with a subscriber with a conventional single time slot on the same channel.
As is shown in Figure 2-2, if both Subscriber A and B select Slot 1, they can only
have communication in Slot 1. Both Subscriber C and D select Pseudo Trunk, so
they can have communication in any time slot on the channel. In Pseudo Trunk
mode, the subscriber will take Slot 1 as its default Tx slot. If there are activities on
the channel, Slot 1 must be occupied. Thus, Subscriber A and B will have their
transmissions according to TX Admit settings if they are to establish communication
now.
If they are to call another subscriber in Pseudo Trunk mode, they can only transmit
in Slot 1. If the object subscriber is free, Subscriber A or B will transmit on Slot 1.
Whether to transmit depends on the status of the channel and TX Admit settings of
the transmitter itself. If the called Pseudo Trunk subscriber is busy, it will not
response to the call.
The Pseudo Trunk subscriber can only call Subscriber A and B which are in a single
time slot in Slot 1, otherwise, there will be no response at all. However, the Pseudo
Trunk subscriber is unable to ensure that it must transmit on Slot 1, so you can
consider designating the Tx slot for it. After you designate the Tx slot, the Pseudo
Trunk subscriber can only transmit on that slot but can receive signals and data from
both slots.
Calls between Pseudo Trunk subscribers can take place in any time slot. However, if
the called subscriber is busy, it will not have any response. If the called subscriber is
in transmitting state, the call must be made in its current slot so that the
communication can be set up.
57
Page 62

Hytera DMR System Planner
The analog carrier occurs in the channel.
The occurrence of the analog carrier on the digital channel will be taken as that both
slots are occupied, and the subscriber will determine whether to transmit according
to TX Admit settings.
TX Admit Analog Carrier
Always allow Tx on Slot 1.
Channel free Tx is allowed.
Color code free Tx on Slot 1.
Application in Repeater Mode
Pseudo Trunk supports the application in Repeater mode in three occasions, too.
There are only subscribers using Pseudo Trunk.
Figure 2.8.1-3:Pseudo Trunk Application in Repeater Mode 1
In Repeater mode, the subscribers using Pseudo Trunk will have the same
transmission as in Direct mode, but the transmitted signals or data will be
transferred by the repeater. Repeaters don’t support Pseudo Trunk feature, as their
time slots are fixed. Yet they support the transmission of the subscribers using
Pseudo Trunk.
Same as in Direct mode, before calling Subscriber B, Subscriber A will also detect
the activities on the channel, and then determine whether to transmit based on the
58
Page 63

Hytera DMR System Planner
status of the slots. If its Tx slot is designated, A will detect the status of the Tx slot
first, and then determine whether to transmit according to TX Admit settings. If the
channel is free, and Subscriber A doesn’t have a designated Tx slot, Slot 1 will be
the default Tx slot for A to establish the communication with B. If Subscriber C is
going to call D now, it will find Slot 1 busy and have the transmission and
communication to D in Slot 2.
If the whole channel is occupied when the subscriber is transmitting, the subscriber
will take Slot 1 as the default Tx slot and determine whether to transmit according to
TX Admit settings. The transmission process is the same as in Direct mode, and the
repeater is used for transferring the signals or data.
See the following details of transmission:
TX Admit Entire Channel Free Only One Slot Free Entire Channel Occupied
Always allow Tx is allowed. Tx is allowed. Tx on Slot 1.
Channel free Tx is allowed. Tx is allowed. Tx is not allowed.
Color code free Tx is allowed. Tx is allowed. Tx is not allowed.
There are both subscribers using Pseudo Trunk and a single time slot respectively.
Figure 2.8.1-4:Pseudo Trunk Application in Repeater Mode 2
In this circumstance, the subscriber with single time slot can only use its own
designated time slot, and the subscriber with Pseudo Trunk can use any slot for
transmission if it doesn’t have designated Tx slot. As the figure above shows, the
single-time-slot Subscriber A and B can only use Slot 1, while pseudo-trunk
Subscriber C and D can use Slot 1 and Slot 2, but will take Slot 1 as their default Tx
slot. Thus, Slot 1 will have big probability to be occupied. Once this happens, the
pseudo-trunk subscribers will determine whether to transmit according to their TX
59
Page 64

Hytera DMR System Planner
Admit settings.
Comparatively, slot 2 will have small probability to be occupied, as it will only be
selected by the subscriber using Pseudo Trunk when Slot 1 is busy, so we suggest
you to designate Slot 2 for part of the pseudo-trunk subscribers.
Repeater mode has a difference from Direct mode that the signals and data are
transferred by the repeater with fixed slot. The repeater itself doesn’t support
Pseudo Trunk, but it won’t affect the use of Pseudo Trunk by the subscribers.
The analog carrier occurs in the channel.
The subscriber will take the occurrence of the analog carrier on the digital channel
as that both slots are occupied, and determine whether to transmit according to TX
Admit settings.
TX Admit Analog Carrier
Always allow Tx on Slot 1.
Channel free Tx is allowed.
Color code free Tx on Slot 1.
Designed TX Slot application Introduction
You can designate the Tx slot for Pseudo Trunk through the CPS, and then the
subscriber will only transmit on that slot but can receive signals or data in both slots.
If you don’t designate any Tx slot, the subscriber will transmit on a free slot and take
Slot 1 as the default one.
Designating the Tx Slot for Direct Mode
Set to “None” and the subscriber will select a free slot for transmission.
If no carrier or analog signal is detected, the subscriber will transmit in Slot 1; in
case of activities in the channel, the first used slot is taken as Slot 1, and if Slot 1 is
in transmission, the new transmission will be made in Slot 2. when the subscriber
receives a call, it will call back by PTT in the slot where the call is received. Once
both slots are occupied or interfered by analog signals, the subscriber will determine
whether to transmit according to TX Admit.
Set to “Slot 1”: The subscriber will transmit in Slot 1 in Pseudo Trunk mode, except
for the response to an incoming call.
If no carrier or analog signal is detected, the transmission will be done in Slot 1; in
60
Page 65
Hytera DMR System Planner
case of activities on the channel, the first used slot will be taken as Slot 1. When the
subscriber receives the call in Slot 1, it will call back in Slot 1, too. If Slot 1 is
occupied, the subscriber will determine whether to transmit according to TX Admit
settings.
z When TX Admit is set to “Allow”, the subscriber will transmit in Slot 1.
z When TX Admit is set to “Color Code Free”, and a call with the same color code
is made in Slot 1, the transmission will be refused here, otherwise, it is allowed.
z When TX Admit is set to “Channel Free”, and a carrier is detected in Slot 1,
transmission will be refused here, otherwise, it is allowed.
Set to “Slot 2”: The subscriber will transmit in Slot 2 in Pseudo Trunk mode, except
for the response to an in coming call.
If no carrier or analog signal is detected, Slot 1 will be taken as the default slot for
transmission. In case of activities on the channel, the first used slot is Slot 1. Thus,
the subscriber will determine whether to transmit in Slot 2 according to TX Admit
settings.
z When TX Admit is set to “Allow”, the subscriber will transmit in Slot 2.
z When TX Admit is set to “Color Code Free”, and a call with the same color code
is made in Slot 2, the transmission will be refused here, otherwise, it is will be
allowed.
z When TX Admit is set to “Channel Free”, and a carrier is detected in Slot 2, the
transmission will be refused here, otherwise, it is allowed.
Designating the Tx Slot for Repeater Mode
Set to “None” and the subscriber will select a free slot for transmission.
If no carrier or analog interference is detected, the subscriber will transmit on Slot 1
after the repeater is activated; if there are activities on Slot 1, the transmission will
be made on Slot 2; if Slot 2 is occupied, the subscriber will make a call again on Slot
1. If the subscriber receives a call, it will call back by PTT on the slot where the call
is received. Once both slots are occupied or interfered by analog signals, the
subscriber will determine whether to transmit according to TX Admit.
Set to “Slot 1”: The subscriber will transmit on Slot 1 in Pseudo Trunk mode, except
for the response.
If no carrier or analog interference is detected, the subscriber will transmit on Slot 1
after the repeater is activated; after receiving a call, the subscriber will respond on
the slot where the call is received; once Slot 1 or both slots are occupied, the
subscriber will determine whether to transmit on Slot 1 according to TX Admit.
61
Page 66

Hytera DMR System Planner
z When TX Admit is set to “Allow”, the subscriber will transmit on Slot 1.
z When TX Admit is set to “Color Code Free” or “Channel Free”, and Slot 1 is
busy, the transmission will be refused.
Set to “Slot 2”: The subscriber will transmit on Slot 2 in Pseudo Trunk mode, except
for the response.
If no carrier or analog interference is detected, the subscriber will transmit on Slot 2,
the default slot, after the repeater is activated; when receiving a call, the subscriber
will respond on the slot where the call is received; once Slot 2 or both slots are
occupied, the subscriber will determine whether to transmit on Slot 2 according to
TX Admit.
z When TX Admit is set to “Allow”, the subscriber will transmit on Slot 2.
z When TX Admit is set to “Color Code Free” or “Channel Free”, and Slot 2 is
busy, the transmission will be refused.
2.8.2 Priority Interrupt
Priority Interrupt allows a subscriber to make the channel free for its own voice or
data service by interrupting an ongoing call on the channel or terminating the
services of a repeater such as Call Hold and Remote Monitor.
Priority Interrupt is especially useful when the channel is busy. With this feature, the
user can interrupt the active call to transmit his voice signals or data on the channel.
This feature is also used for channel management to optimize channel efficiency.
Priority Interrupt allows a subscriber to make the channel free for its own voice or
data services by interrupting an ongoing call on the channel or terminating the
services of a repeater such as Call Hold and Remote Monitor. This feature can only
interrupt the voice services but not data. Thus, the ongoing data services such as
GPS or short message on the channel will not be affected.
In Pseudo Trunk mode, the channel has two time slots, which can be used to
receive data and voice services separately at the same time. When one slot is
occupied, the subscriber can transmit the Priority Interrupt command in the other
slot, and the active call on the channel will be interrupted when the target subscriber
responds to the command.
Before transmitting the Priority Interrupt command, the subscriber will detect the
channel status. If Slot 1 is busy with a call and Slot 2 is free, the command will be
transmitted in Slot 2. Then, after the target subscriber receives and decodes the
command in Slot 2, the ongoing call in Slot 1 will be interrupted, so the interrupting
subscriber can transmit its own services in Slot 1. The subscriber which enables
62
Page 67

Hytera DMR System Planner
Priority Interrupt Encode/Decode can transmit the voice signals in the designated
slot only. Call Back Priority Interrupt command can only be transmitted in the
call-receiving slot.
When the Pseudo Trunk Designated TX is not specified, the subscriber can transmit
voice signals in either Slot 1 or 2, but Slot 1 will be the default. Once it is occupied,
the transmission will be done in Slot 2; once both slots are occupied, the subscriber
will determine whether to transmit on Slot 1 according to TX Admit settings. When
there is a Pseudo Trunk Designated TX, the subscriber will transmit the voice
signals on the designated slot. Once the slot is busy, the subscriber will determine
whether to transmit according to TX Admit settings. In Pseudo Trunk mode, the
subscriber supports the receipt of voice signals in two slots no matter it is
designated with Priority Interrupt feature or not.
It is suggested to designate one slot as the Tx slot for all the subscribers before
applying Priority Interrupt, in order to avoid the failure of this feature due to the
occupation of both slots.
See the following schematic diagram of Priority Interrupt:
Figure 2.8.2-1:Schematic Diagram of Priority Interrupt
Hytera Priority Interrupt feature works in bi-slotted mode and requires a free slot for
command transmission, but it accords with DMR standard, compatible with other
63
Page 68

Hytera DMR System Planner
DMR features. When both slots are occupied, the subscriber will have an impolite
transmission of Priority Interrupt command to increase its success rate. If the
interruption fails, the system will give the prompt “Channel busy” or a request for
random hold off.
After Priority Interrupt command is transmitted, services except call back will be
transmitted in the designated Tx slot under Pseudo Trunk. The Call Back Priority
Interrupt will be transmitted in the call-receiving slot.
There are six means of Priority Interrupt:
Interrupt by shortcuts: To transmit this command via a programmable key to interrupt
the on-going call on the channel.
Call Back Priority Interrupt: When receiving a call, the user is allowed to interrupt the
call to call back by pressing PTT key.
Message Priority Interrupt: To enable Priority Interrupt feature by message, in order
to interrupt the ongoing call and send the message.
Caution: Same as short message, GPS message can also trigger Message Priority
Interrupt provided that the parameter of GPS Revert Channel is enabled. However,
it is not suggested to set this command in GPS Revert Channel, so that normal
communications on the channel will not be disturbed.
Emergency Priority Interrupt: To ensure the timely and uninterrupted emergency
alarm, users are allowed to interrupt the active call by Emergency Alarm.
Radio Disable Priority Interrupt: When the channel is busy, the subscriber is allowed
to transmit the Radio Disable command to trigger the interruption to the ongoing call,
so as to finish the disabling operation.
All Call Priority Interrupt: When the channel is busy, the subscriber is allowed to
transmit the All Call request to trigger the interruption to the ongoing call via the
command, in order to finish the All Call request.
To use Priority Interrupt feature normally, users need to configure its related
parameters at TX/RX end properly according to actual requirements. Priority
Interrupt, a channel-specific feature, is only operable on the channel which enables
it. Besides enabling the corresponding Priority Interrupts for different uses, you also
have to select Priority Interrupt Encode and Priority Interrupt Decode options for the
channel you use.
To carry out Priority Interrupt function, you need to set parameters for the
interrupting subscriber and the interrupted one respectively.
64
Page 69

Hytera DMR System Planner
Shortcut Application
Configuration Requirements:
1. The interrupting subscriber, Subscriber B, must enable Priority Interrupt Encode
on the current channel and set the programmable key corresponding to the
function. e.g.: Set SK1 corresponding to Priority Interrupt.
2. Subscriber A, the interrupted subscriber, must have the enabled Priority
Interrupt Decode option on the current channel.
3. Both the subscribers are on the same channel, using Pseudo Trunk and
meeting the requirements on TX Admit settings.
See Figure: 2.8.2-2 for the example.
Figure 2.8.2-2: Shortcut Application
1. Subscriber A is transmitting voice signals in communication with B and C in
Group Call 1.
2. Subscriber B transmits Priority Interrupt command by SK1.
3. After Subscriber A receives and decodes the command, the call will be
interrupted and the prompt, “Call interrupted”, will pop up in its main interface.
Also, Subscriber C will get a notice that the call is over, and B will be noted
“Interrupt Success”.
65
Page 70

Hytera DMR System Planner
Call Back Priority Interrupt Application
Configuration Requirements:
1. The interrupting subscriber, Subscriber B, must enable Priority Interrupt Encode
on the current channel and set TX Admit to Always Allow.
2. Subscriber A, the interrupted subscriber, must have the enabled Priority
Interrupt Decode option on the current channel.
3. Both the subscribers are on the same channel, using Pseudo Trunk and
meeting the requirements on TX Admit settings.
See Figure 2.8.2-3 for the example.
Figure 2.8.2-3: Call Back Priority Interrupt Application
1. Subscriber A is transmitting voice signals in communication with B and C in
Group Call 1.
2. Subscriber B can call back via PTT key. In the entire process, B will not be
prompted whether the interrupt succeeds.
3. After receiving and decoding the Priority Interrupt command, Subscriber A will
be interrupted and prompted “Call Interrupted” on its main interface. And then it
will receive Group Call 1 from B.
4. Subscriber C will be prompted that the call is over and get Group Call 1 from B.
66
Page 71

Hytera DMR System Planner
Message Priority Interrupt Application
Configuration Requirements:
1. The interrupting subscriber, Subscriber B, must enable Priority Interrupt Encode
on the current channel.
2. Subscriber A, the interrupted subscriber, must have the enabled Priority
Interrupt Decode option on the current channel.
3. Both the subscribers are on the same channel, using Pseudo Trunk and
meeting the requirements on TX Admit settings.
4. Subscriber B, the interrupter, must have the selected Message Priority
Interrupt.
See Figure 2.8.2-4 for the example.
Figure 2.8.2-4: Message Priority Interrupt Application
1. Subscriber A is transmitting voice signals in communication with B and C in
Group Call 1.
2. Subscriber B sends a message to the target subscriber. Here we take A as the
target.
3. After receiving and decoding the Priority Interrupt command, Subscriber A will
be interrupted and prompted “Call Interrupted” on its main interface. Then it will
receive the message from B.
4. Subscriber C is prompted that the call is over.
67
Page 72

Hytera DMR System Planner
5. If B sends a message to C, A will receive the interrupt command and be
interrupted after it decodes the command. Then it will be prompted “Call
Interrupted”. C will be prompted that the call is over and get the message from
B.
Emergency Priority Interrupt Application
Configuration Requirements:
1. The interrupting subscriber, Subscriber B, must enable Priority Interrupt Encode
on the current channel.
2. Subscriber A, the interrupted subscriber, must have the enabled Priority
Interrupt Decode option on the current channel.
3. Both the subscribers are on the same channel, using Pseudo Trunk and
meeting the requirements on TX Admit settings.
4. Subscriber B, the interrupter, must have the Emergency Priority Interrupt
enabled.
See Figure 2.8.2-5 for the application example.
Figure 2.8.2-5: Emergency Priority Interrupt Application
1. Subscriber A is transmitting voice signals in communication with B and C in
Group Call 1.
2. Subscriber B transmits an Emergency Alarm.
68
Page 73
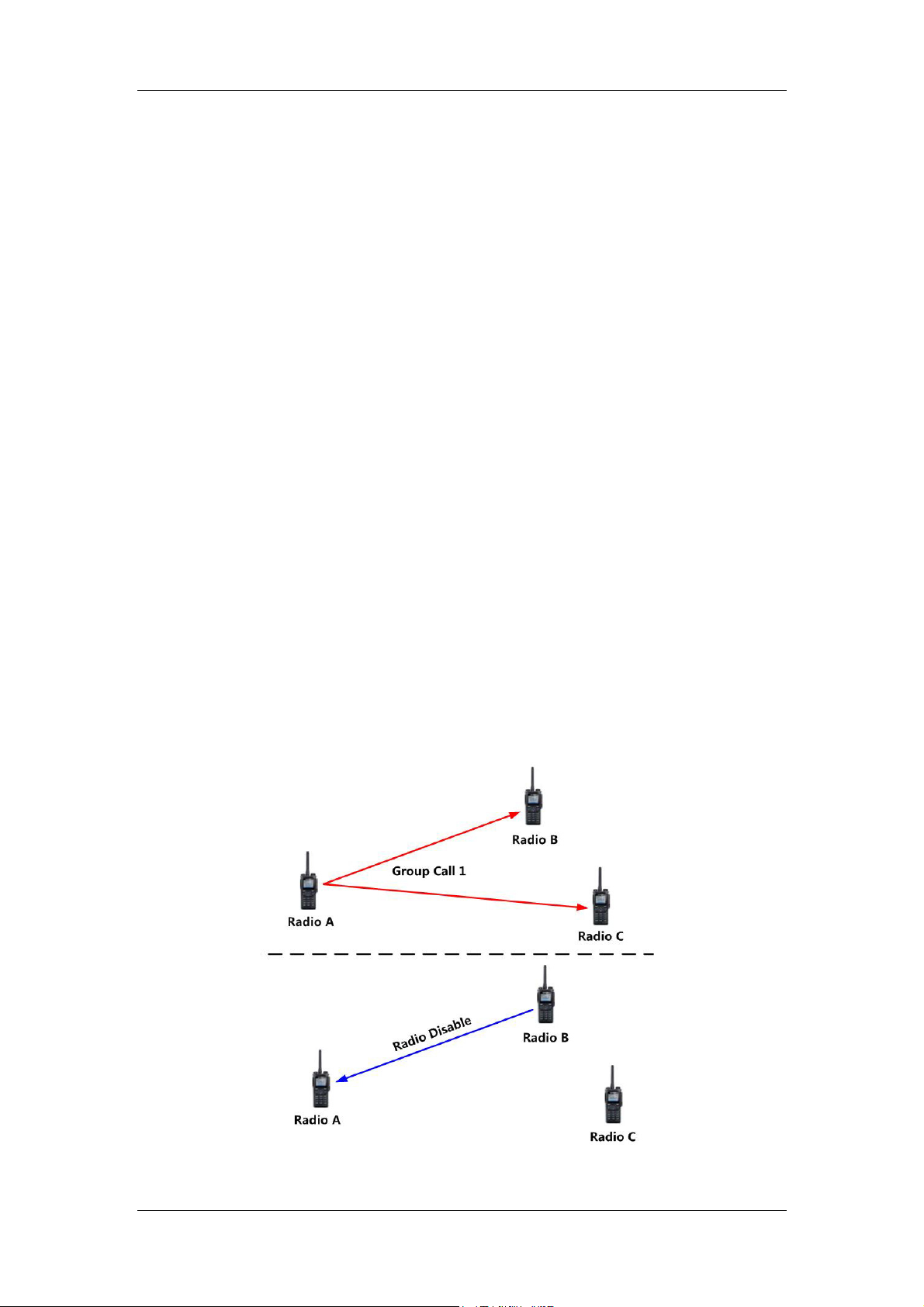
Hytera DMR System Planner
3. After receiving and decoding the Priority Interrupt command, Subscriber A will
be interrupted and prompted “Call Interrupted” on its main interface. And then it
will receive the Emergency Alarm from B.
4. Subscriber C will be prompted that the call is over and get the alarm from B.
5. After transmitting the interrupt, B can make Emergency Call via PTT key. It will
not be prompted “Interrupt Success” during the transmission of the interrupt.
The subscriber, A or C, which selects the Emergency Alarm Ack option, will
automatically acknowledge when it receives the emergency number. It is suggested
to enable only one subscriber to make Ack operation on the channel.
Radio Disable Priority Interrupt Application
Configuration Requirements:
1. The interrupting subscriber, Subscriber B, must enable Priority Interrupt Encode
on the current channel.
2. Subscriber A, the interrupted subscriber, must have the enabled Priority
Interrupt Decode option on the current channel and the enabled Radio Disable
Decode.
3. oth the subscribers are on the same channel, using Pseudo Trunk and meeting
the requirements on TX Admit settings.
4. ubscriber B, the interrupter, must have the Radio Disable Priority Interrupt
enabled.
See Figure 2.8.2-6 for the example.
Figure 2.8.2-6: Radio Disable Priority Interrupt Application
69
Page 74

Hytera DMR System Planner
1. Subscriber A is transmitting voice signals in communication with B and C in
Group Call 1.
2. Subscriber B initiates the Radio Disable, targeting at Subscriber A or another.
The target subscriber must select Radio Disable Priority Interrupt option apart
from setting the Priority Interrupt parameters.
3. After receiving and decoding the Priority Interrupt command, Subscriber A will
be interrupted and prompted “Call Interrupted” on its main interface. Then it will
receive the Radio Disable command from B, and be disabled after decoding the
command.
4. Subscriber C is prompted that the call is over.
5. If B doesn’t receive the ACK from A, it will try to transmit the Radio Disable
command again, but not the Priority Interrupt one.
6. If B sends the Radio Disable command to C, A will receive the interruption
command and be interrupted after it decodes the command. Then it will be
prompted “Call Interrupted”. C will be prompted that the call is over, get the
Radio Disable command from B and be disabled after decoding the command.
70
Page 75

Hytera DMR System Planner
All Call Priority Interrupt Application
Configuration Requirements:
1. he interrupting subscriber, Subscriber B, must enable Priority Interrupt Encode
on the current channel.
2. ubscriber A, the interrupted subscriber, must have the Priority Interrupt Decode
option and the Radio Disable Decode enabled on the current channel.
3. oth the subscribers are on the same channel, using Pseudo Trunk and meeting
the requirements on TX Admit settings.
4. ubscriber B, the interrupter, must have the All Call Priority Interrupt enabled.
See Figure 2.8.2-7 for the example.
Figure 2.8.2-7:All Call Priority Interrupt Application
1. Subscriber A is transmitting voice signals in communication with B and C in
Group Call 1.
2. Subscriber B initiates All Call. During its transmission, B will not be prompted
any information on interrupt.
3. After receiving and decoding the Priority Interrupt command, Subscriber A will
be interrupted and prompted “Call Interrupted” on its main interface. And then it
will receive the All Call request from B and start communication.
4. C will be prompted that the call is over, then receive the All Call from B and start
communication.
71
Page 76
Hytera DMR System Planner
2.9 Analog function
Hytera DMR supports analog features. DMR conventional radios support both digital
and analog modes so that they can work in both environments, the mixed channel of
Hytera DMR repeater supports digital and analog signals in one channel.
Hytera analog mode includes three types of bandwidth for users to choose: 12.5kHz,
20kHz and 25kHz. The analog channels adopt traditional frequency adjusting
technologies. DMR radios in Analog mode support all the features of the analog
radios.
The supported features are as follows. To learn more details, please refer to Hytera
DMR product function list.
Analog voice and basic feature:
Monitor
Channel spacing(12.5kHz/20kHz/25kHz)
Analog Scrambling
Emphasis/De-emphasis (analog only)
Frequency Deviation (analog)
Flat Audio
Squelch
Auto reset
Scan
Emergency
HDC1200 singling feature:
PTT ID
PTT ID Display
PTT Sidetone
Contact List (Selective Call)
Emergency
Scan
CTCSS Transmit
Private Call
Group Call
All Call
Manual Dial
72
Page 77

Digital of Squelch (DOS)
Five tone singling feature:
User Mode (Advanced and Basic)
Multi-call Address (manual dial)
Multi-call Status (manual dial)
Standard System of ZVEI1, ZVEI2, ZVEI3, CCIR1,
CCIR2, CCIR3, EEA, EIA
PTT ID
Smart Call
ACK1/Authorization (with ack only)
Call list
Private Call
Hytera DMR System Planner
Group Call
Two tone singling feature:
Contact list
Alias
Selective Call
Alert Call
Alert Call w/Voice
ACK
Clear to Transpond
Decode Format
Vibration
73
Page 78

Hytera DMR System Planner
2.10 Back-to-Back
The “back-to-back” is a system solution based on accessory pin. It is used to
achieve cross-band communication among analog and digital terminals. There are
two methods of back-to-back solution provided by Hytera:
Back-to-back Mobile Radio
Back-to-back Repeaters
2.10.1 Mobile Radio Accessory Pin
Input
On both analog and digital channels, the mobile radio can trigger or terminate the
transmission via the accessory pin, and the audio signals to be transmitted will be
sampled via the input pin as well.
Function Typ e Applicable
Mode
EXT Mic PTT
(via
accessory
PTT)
Tx Audio
(via external
MIC signal)
Output
On both analog channel and digital channels, the mobile radio can output (in level
form) the status of call request as well as the call contents from the portable radio
via the accessory pin. The definition of involved pins is given below:
A fixed
function
A fixed
function
Analog and
Digital
Analog and
Digital
Definition
When a valid level is input, the mobile
radio will trigger its external PTT and
transmit the audio signal sampled
from Codec. However, the
transmission will be stopped in case
of invalid level.
When the external PTT is enabled,
the mobile radio will transmit the
audio signals.
74
Page 79

Hytera DMR System Planner
Function Type Applicable
Mode
Speaker
Open Detect
(for speaker
detection)
Rx Audio
Output
(for audio
output)
Programmable Analog and
Digital
A fixed
function
Analog and
Digital
Definition
When the speaker is detected
unmuted, the mobile radio will output
a valid level. However, it will output
an invalid level when the speaker is
muted.
When any audio signal is received,
the mobile radio will output such
signal via the accessory pin.
2.10.2 Repeater Accessory Pin
Input
On both analog and digital channels, the repeater transmission can be triggered or
terminated via the accessory pin, and the audio signals to be transmitted will be
sampled via the input pin as well.
Function Type Applicable
Mode
EXT Mic PTT Programmable Analog and
Digital
Tx Audio A fixed
function
Output
On both analog and digital channels, the repeater can output (in level form) the
status of call request as well as the call content from a terminal via the accessory pin.
The definition of involved pins is given below:
Analog and
Digital
Definition
When a valid level is input, the
repeater will trigger its external PTT
and transmit the audio signal
sampled from Codec. However, the
transmission will stop in case of
invalid level.
When the external PTT is enabled,
the repeater will transmit the audio
signals.
75
Page 80

Hytera DMR System Planner
Function Type Applicable
Definition
Mode
Carrier Detect Programmable Analog Upon receiving the call request from an
analog portable radio, the repeater will
output a valid level if the carrier
matches; when the portable radio stops
the call, the repeater will output an
invalid level for there is no carrier input.
Note: not applicable to users with
CTCSS/CDCSS enabled. The level can
indicate that whether the repeater is
working.
CTCSS/CDC
SS Detect
Programmable Analog Upon receiving the call request from an
analog portable radio, the repeater will
output a valid level if the
CTCSS/CDCSS signaling matches;
when the portable radio stops the call,
the repeater will output an invalid level
for there is no CTCSS/CDCSS signaling
input.
Note: applicable to users with
CTCSS/CDCSS enabled. The level can
indicate that whether the repeater is
working.
Rx Audio
Output
A fixed function Analog During its working, the repeater will
retransmit the received audio signals via
the accessory pin.
Voice Detect Programmable Digital When receiving the call request from a
digital portable radio, the repeater will
output a valid level if the signaling
matches; when the portable radio stops
the call, the repeater will output an
invalid level for there is no signaling
input.
The level can indicate that whether the
repeater is working.
Audio
Playback
Slot-A/Audio
Playback
Slot-B
A fixed function Digital During its working, the repeater will
retransmit the received audio signals via
the accessory pin.
You can select and monitor the time slot
output.
76
Page 81

Hytera DMR System Planner
2.11 Hytera DMR Application Protocol
Hytera digital radio provides application interfaces for secondary development for
third party partners besides its original functions. Hytera DMR Application Protocol
(HDAP) is the general term of a series of application-layer protocols; it contains
Radio Registration Service (RRS), Location Protocol (LP), Text Message Protocol
(TMP), Radio Control Protocol (RCP), Telemetry Protocol (TP), and Data Transmit
Protocol (DTP).
This protocol is designed to support voice, signalling and data communication on a
point-to-point connection between distinct networks. HDAP Application (which is
usually deployed in a PC) connects to the Dispatcher Station, which can be Mobile
or Repeater, voice, signaling and data message are transmitted via IP network
between application and Dispatcher Station, and through radio network between
Dispatcher Station and DMR radios.
Hytera currently mainly provides DMR application applications as below:
Hytera Radio Registration Service
Hytera Location Service
Hytera Radio Control Service
Hytera Text Message Service
Hytera Data Transmission Service
Hytera Telemetry Service
Hytera Real-time Transport Service (Only for Repeater)
These DMR applications are enough to meet general applications. For better using
Hytera digital radio, we have extended platform of PC interface based on DMR
application applications which enables you to use and control the radio over the
extended platform. You can connect Hytera radio system by this interface which
provides more powerful application system. These DMR applications are achieved
through the TCP/IP protocol, which bring flexible system networking.
77
Page 82
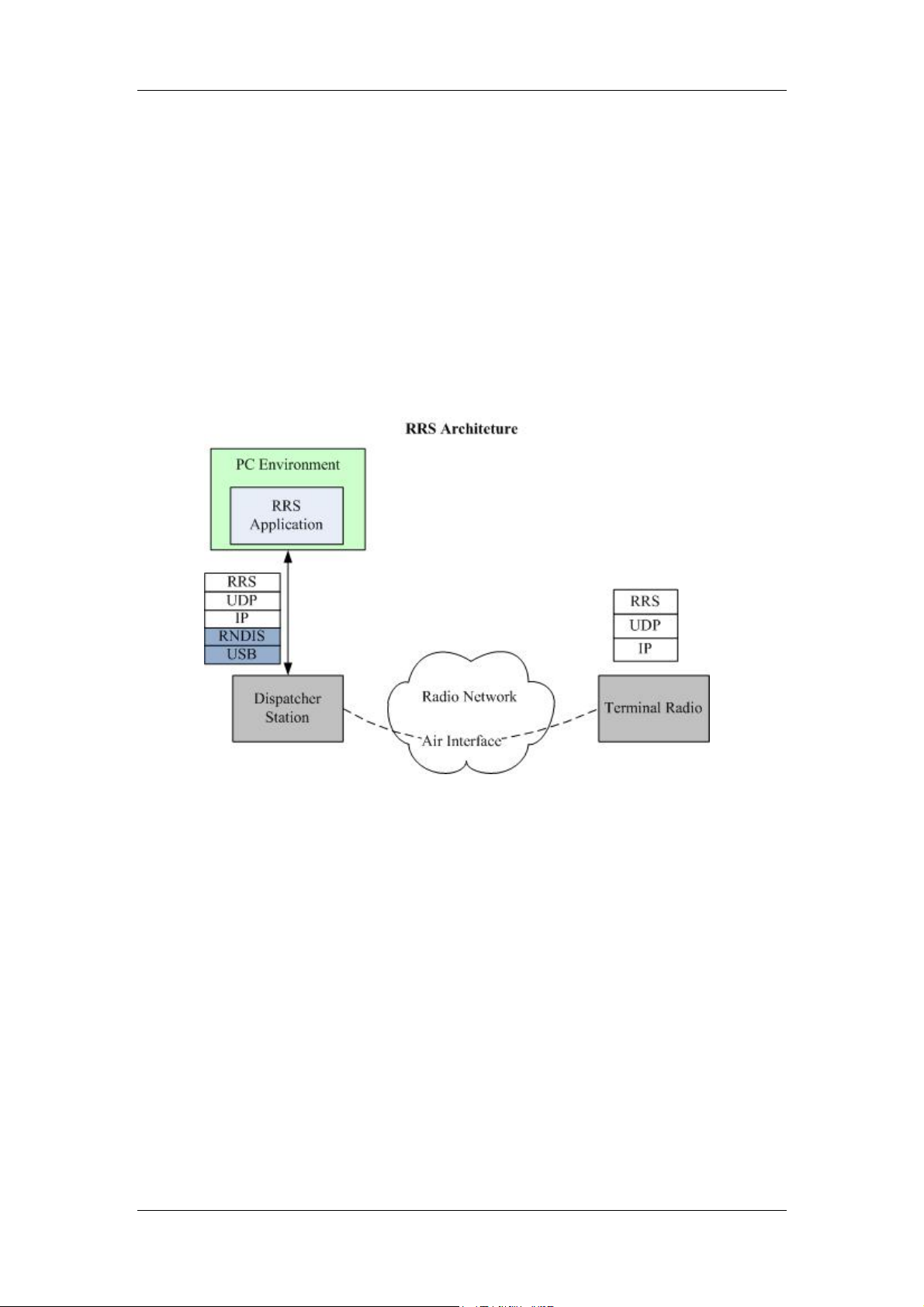
Hytera DMR System Planner
2.11.1 Radio Registration Service (RRS)
The data business application of radio system comprises positioning system, text
message system, telemetry, data transmission, etc. All these applications need to
exchange information with the radio and know whether the radio is online or offline.
RRS protocol provides a share registration service, which receives the registration
of the radio, cancels registration and saves the registration information, as well as
forwards related information to required client application system. Thus, all client
applications acquire radio present information by accessing the RRS Application,
and save wireless radio channel resource accordingly.
Figure 2.11.1-1:RRS Protocol Architecture
Notes:
z The Dispatcher Station in the diagram above acts as a forwarder for the
commands receives from the HDAP application to the Terminal Radio.
z If Dispatcher Station is a mobile, then the physical transmission medium is USB
cable, RNDIS will be used to virtualize the USB interface to network interface.
If Dispatcher Station is the repeater, then the transport layer filled in blue color is
ignored. This applicable to the following figures.
As shown in the figure above, radio registration protocol (RRS) bases on UDP/IP
protocol. The radio terminal will send related registration message to the Dispatcher
Station (Hytera radio equipment, e.g. Mobile) of the control center when it is turned
on and off, the Dispatcher Station will transmit the protocol data packet to RRS
Application through USB, and RRS Application will record the radio information after
receiving the registration message.
78
Page 83

Hytera DMR System Planner
The radio registration protocol contains the following two basic contents:
Radio online service
When the radio is turned on, it will send an online registration protocol to RRS
Application, indicating that the radio has logged into the application system. When
the RRS Application receives a registration message sent by the radio, it replies to
the radio that the online registration message has been received.
Radio offline service
When the radio is offline, it sends an offline registration protocol to RRS Application,
indicating that the radio has logged out the application system. When the RRS
Application receives the logout message sent by the radio, it replies to the radio that
it has received the logout message.
For more information, please refer to the following files:
z Hytera DMR Application Protocol Specification
z Hytera DMR Application Programming Interface
z Hytera DMR ADK Development Guide
79
Page 84
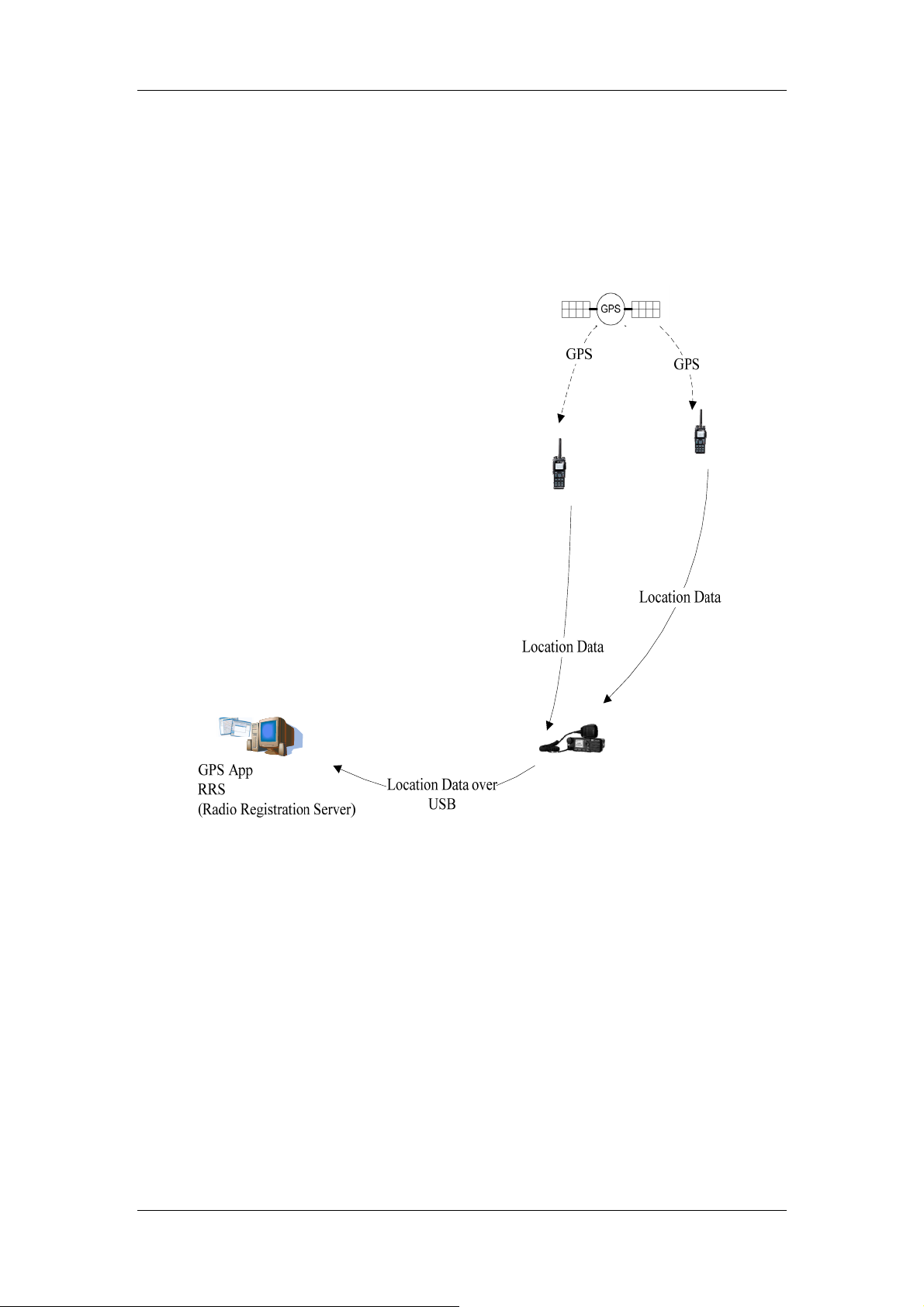
Hytera DMR System Planner
2.11.2 Positioning System(LP)
The topological diagram of Hytera digital location service system is shown in figure
below. This system is comprised of three parts: 1) GPS, 2) radio network, and 3) PC.
Figure 2.11.2-1: Hytera Location System Diagram
In the location system, the GPS RX module in the radio receives GPS information
(including latitude, longitude, altitude, time, speed), providing basic location data
source for the system. Then the received location information is transmitted to the
Dispatcher Station in control center over the wireless air interface; finally to PC via
the USB cable. PC can communicate with any radio in the wireless radio network.
For example, it can request any radio in the system to send its location information.
There are two types of reporting: periodical reporting and single reporting. When the
radio is in an emergency, it can send its GPS information to PC, for the dispatcher to
arrange rescue according to the location.
The radio communicates with PC via the Hytera Location Protocol (LP); this protocol
allows the information to be transmitted in the radio network over the public air
interface, and between PC and the Dispatcher Station via the USB cable. The LP
80
Page 85
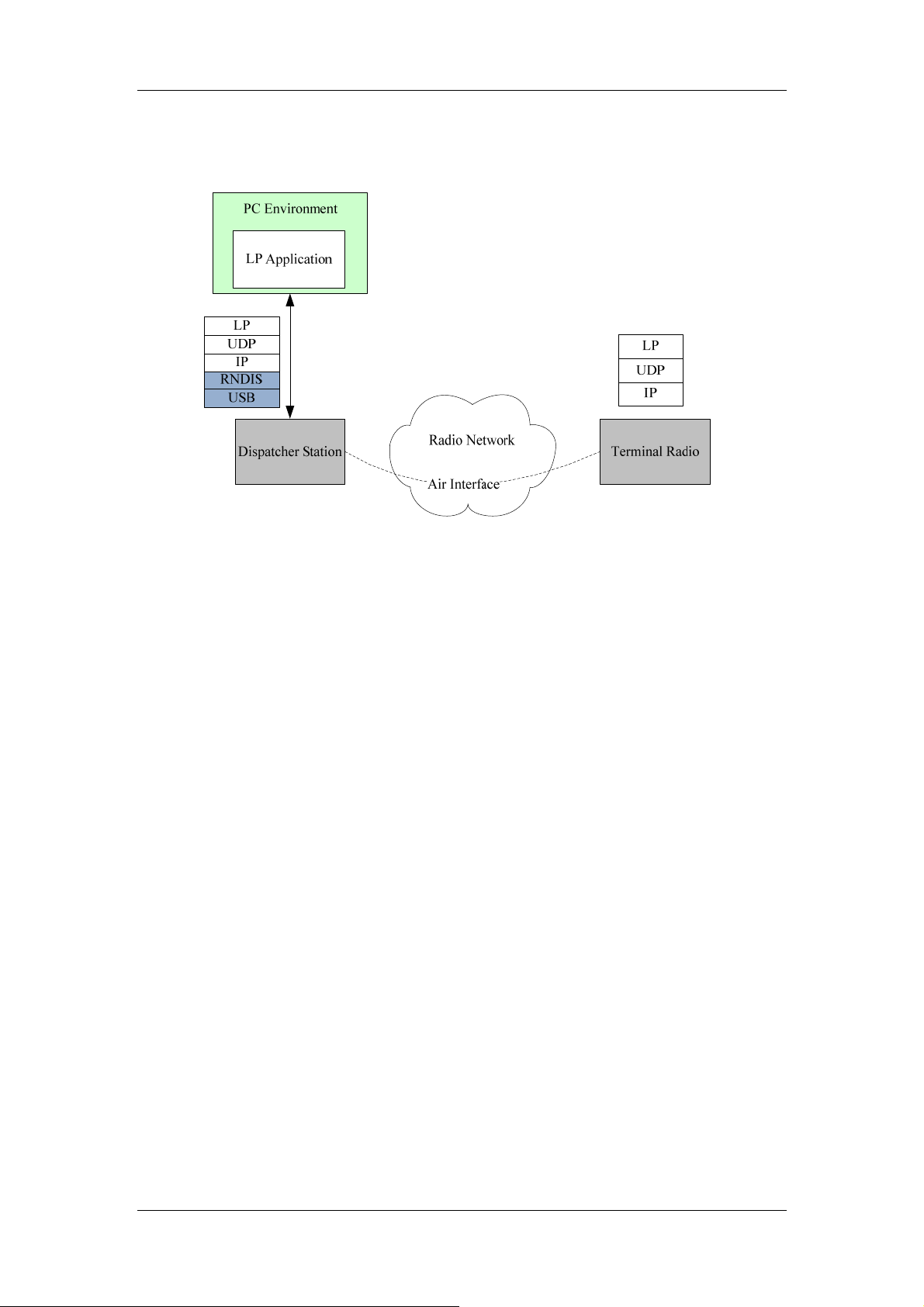
Hytera DMR System Planner
defines procedures and specifications between PC and the radio regarding
command and response.
Figure 2.11.2-2: Location Protocol Architecture
For more information, please refer to the following files:
z Hytera DMR Application Protocol Specification
z Hytera DMR Application Programming Interface
z Hytera DMR ADK Development Guide
81
Page 86

Hytera DMR System Planner
2.11.3 Radio Control Service(RCP)
Hytera provides radio control protocol specification and API library based on PC to
achieve radio system calling. Hytera digital radio is able to individual calling, group
calling and all calling. You can integrate all these calling into user system by ADK
and achieve calling from user’s application system.
Figure 2.11.3-1: Radio Control Protocol Architecture
Notes:
z In repeater API, HRNP is not needed, because HRNP is usually used in wired
communication, such as USB or UART.
As the chart shows, HRNP is a network layer protocol between PC application
system and the Dispatcher Station, and a user-defined protocol based on UDP/IP
through which PC application system transfers calling order to corresponding distant
radio by using the Dispatcher Station as a transient station. The Dispatcher Station
will transfer received calling request information to PC application system.
For more details, please refer to below files:
Hytera DMR Application Protocol Specification
Hytera DMR Application Programming Interface
Hytera DMR ADK Development Guide
82
Page 87
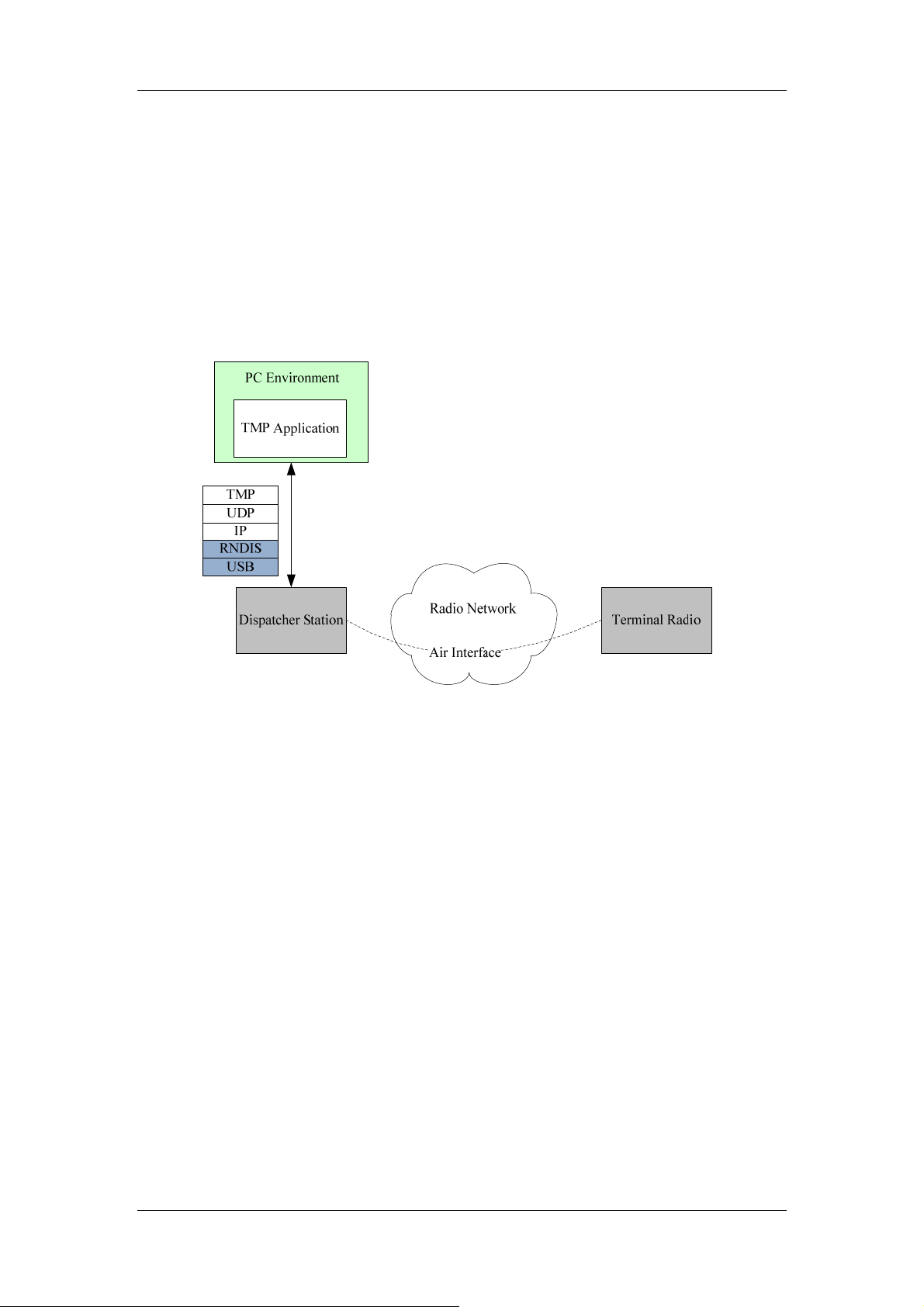
Hytera DMR System Planner
2.11.4 Text Message Service (TMP)
Hytera Text Message ADK is a simple text message transmission protocol realized
in radio system. In radio system, one-to-one text message transmission can be
realized, as well as the function of one to multiple. Text Message ADK is an
extension based on it enabling user to realize transmitting and receiving text
message through ADK interface on PC.
Figure 2.11.4-1: Text message protocol frame
As shown in the figure, the text messages are transmitted by carried in UDP/IP
packets through USB cable. In wireless network of radio, the text messages are
conveyed via common air interface (CAI).
The following functions can be realized through Hytera Text Message ADK:
z PC sends a message to a specific terminal. This task is realized by verifying ID
of the terminal. Only those terminals with ID in accordance can receive this
message. Those terminals with ID not in accordance will automatically cast off
this message.
z PC sends a message to all terminals of a group. This task is realized by
verifying ID of the terminal. Only those terminals with the same group ID can
receive this message.
z Terminal sends a message to PC. The terminal sends a message to Dispatcher
Station connected with PC. As long as transmission to PC option is set in
Dispatcher Station, it will enable PC to receive this message. This message is
sent by Dispatcher Station connected with it. At this time, Dispatcher Station
plays the function similar as gateway enabling to transmit message in wireless
network to PC network.
83
Page 88

Hytera DMR System Planner
For more details, please refer to the following files:
Hytera DMR Application Protocol Specification
Hytera DMR Application Programming Interface
Hytera DMR ADK Development Guide
2.11.5 Data Transmission Service (DTP)
The ADK of Hytera data transmission is a simple data transmission protocol
achieved in the Hytera radio system. By the ADK of data transmission, Hytera
provides a data transmission channel based on UDP/IP. You can transmit
end-to-end data through this data channel and you can also develop your own data
transfer application using the ADK interface of Hytera data transmission to transmit
user data to a remote designated client. For example, you can transmit your files to
remote PC by this ADK platform.
Figure 2.11.5-1: Data Transmit Protocol Architecture
As the chart shows, the ADK of Hytera data transmission is achieved by
transmission channel based on UDP/IP. In the radio wireless network, reception and
sending of data transmission are running in the common air interface (CAI).
For more details, please refer to below files:
Hytera DMR Application Protocol Specification
Hytera DMR Application Programming Interface
Hytera DMR ADK Development Guide
Please note that, this service is applicable only when the Dispatcher Station is
mobile, because when the Dispatcher Station is repeater, this can be achieved by IP
network.
84
Page 89

Hytera DMR System Planner
2.11.6 Telemetry Service (TMP)
The ADK of Hytera telemetry provides a telemetry application system based on
Hytera radio system on PC. PC application system can monitor Hytera radio input
information and also control Hytera radio output information. For example, you can
monitor radio GPIO input information and control GPIO output status. When you
connect the sensor to the radio GPIO port, the radio is able to monitor sensor
changes and send the information to the monitor center by the wireless air interface
which enables the operator in the monitor center to real-time monitor the status in
the system.
Figure 2.11.6-1: Telemetry protocol framework
85
Page 90

Hytera DMR System Planner
2.11.7 Real-time Transport Service (RTP)
In radio wireless communication, the radio equipments communicate with each
other via air interface. In DMR Systems, the voice is transmitted by encapsulating in
DMR frames and encoded in AMBE (or SELP, or some other wireless
communication speech coding algorithms). However, as many applications, which is
usually deployed in a PC, do not support encoding/decoding with those vocoder, in
order to communicate with radios, there must be a voice transport protocol to
transport the voice stream and a common known encoding/decoding vocoder
between radio equipment and the application.
Figure below illustrate a common topology for communications between radios and
PC application. From the figure below, the repeater is responsible for converting
voice stream between radio network and UDP/IP network.
Figure 2.11.7-1: Communication between Distinct Networks
Real-time Transport Protocol (RTP) is used to transmit voice stream between the
application and Dispatcher Station. RTP provides end-to-end delivery services for
data with real-time characteristics, such as interactive audio and video. To satisfy
the special requirements of radio wireless communication, RTP header extension is
defined to carry particular radio information that allows the application to know more
of the call information that is extracted from the DMR protocol.
86
Page 91

3 Components of DMR System
Our DMR communication system mainly consists of the portable radio, mobile radio,
repeater and RDAC. These components provide different uses. The users can
select them according to their actual requirements.
This chapter describes function and performance of these components, facilitating
the users to select proper devices for communication.
Our conventional DMR devices are available in all frequency bands listed below:
U1: 400 - 470MHz
U2: 450 - 520MHz
U3: 350 - 400MHz
U5:
806 - 825MHz (TX only)
851 - 870MHz (TX and RX)
896 - 902MHz (RX only)
935 - 941MHz (TX and RX)
V: 136 - 174MHz
87
Page 92
Hytera DMR System Planner
3.1 Portable Radio
Our DMR digital portable radio supports both the analog mode and digital mode. Its
high-capacity Li-Ion battery and battery save mode allow users to work for a long
time period without the need to charge the battery. The portable radios can
communicate with each other within a communication range of 3 kilometers,
satisfying the requirements of common users.
The portable radios are classified into two categories: display model and
non-display model. They can be programmed via the Customer Programming
Software (CPS). The conventional DMR features can be enabled or disabled via the
programmable keys or the menu (for the display model only).
Our DMR portable radios mainly consists of PD78X series, PD70X series and X1
series. They are available in the frequency bands described in the table below.
Please note that the PD78X series portable radios are the display models.
Model Frequency Band
PD78X V U1 U2 U3 U5
PD780R U1
PD78XG V U1 U2 U3 U5
PD780 CQST IIB V U1 U2 U3
PD79XEx IIC V U1 U3 U5
PD79XIS FM IIB U2
PD700R U1
PD700L V U1 U2
PD70X PD70XG V U1 U2 U3 U5
PD700 CQST IIB V U1 U2 U3
X1e V U1 U3 U5
X1p V U1 U3
X1s
The battery life for our DMR portable radios is listed below:
Battery Life
Digital Mode:
U1: 14.5h, 12.5h (G); U2: 14.5h, 12.5h (G); U3: 14.5h, 12.5h(G); U5: 13.5h, 12h(G); VHF:
13.5h, 12h(G)
Analog Mode:
U1: 12.5h, 11h (G); U2: 12.5h, 11h(G); U3: 12.5h, 11h(G); U5: 11h, 10h(G); VHF: 11h,
10h(G)
88
Page 93

Hytera DMR System Planner
3.1.1 Product Overview
Figure 3.1.1-1: Display Model
No. Part Name No. Part Name
1 SK1 (Side Key 1) 11 LED Indicator
2 PTT Key 12 Antenna
3 SK2 (Side Key 2) 13
4 TK (Top Key) 14 Accessory Jack
5 Channel Selector Knob 15 Back Key
6 Microphone 16 Up Key
7 LCD Display 17 Down Key
8 OK/Menu Key 18 Battery Latch
9 Speaker 19 Belt Clip
10 Numeric Keypad 20 Battery
Radio On-Off/Volume
Control Knob
89
Page 94

Hytera DMR System Planner
Figure 3.1.1-2: Non-display Model
No. Part Name No. Part Name
1 SK1 (Side Key 1) 8
Radio On-Off/Volume
Control Knob
2 PTT Key 9 Microphone
3 SK2 (Side Key 2) 10 Accessory Jack
4 TK (Top Key) 11 Battery Latch
5 Channel Selector Knob 12 Antenna
6 Speaker 13 Belt Clip
7 LED Indicator 14 Battery
90
Page 95

Hytera DMR System Planner
Programmable Keys
For enhanced convenience, the keys SK1, SK2, and TK can be programmed as
shortcuts to the functions listed below:
No. Shortcut Key Description
1 Zone Up
To select a desired zone quickly
2 Zone Down
3 Keypad Lock To lock or unlock the keypad quickly
4 Contact List To access the menu “Contact List” quickly
5 Message To access the menu “Message” quickly
6 Call Log To access the menu “Call Logs” quickly
7 Adjust Power Level To adjust power level quickly
8 Talk Around To directly communicate with other radios
9 Monitor
To adjust the condition for incoming signal match
10 Monitor Momentary
11 Squelch Off
12 Squelch Off Momentary
13
Home Screen
To always unmute speaker no matter whether
carrier is present or not
To quickly return to the previous menu or home
screen
14 Scan To receive signals on other channels
15
Nuisance Temporary
Delete
To temporarily ignore unwanted channel activity
16 Emergency To summon help in emergent situations
17
Adjust Squelch Level
To temporarily adjust the squelch threshold
required for the radio to unmute
18 Battery Strength Indicator To indicate the battery strength
To activate Emergency in the case that the radio is
19
Man Down
positioned aslant for a preset time period due to an
unexpected situation
Scrambler: To encrypt the voice so as to guarantee
privacy of the communication
20
Scrambler/Encrypt
Encrypt: To encrypt the voice and message so as to
guarantee privacy of the communication
21 Lone Worker To protect the operators from accidents
22 One Touch Call 1-5 To make appropriate services quickly
23 Status To access the menu “Status List” quickly (for
91
Page 96

Hytera DMR System Planner
5-Tone)
24
25
26 Phone List To access the menu “Phone List” quickly
27
Telemetry
DTMF Keypad
Roam
To supervise remote devices
To enter or exit the DTMF keypad mode (In the
DTMF Keypad mode, enter a number via the
keypad to make a phone call.)
To communicate between sites in the IP Multi-site
Connect system.
3.1.2 Basic Operations
Turning the Radio On/Off
Rotate the Radio On-Off/Volume Control knob clockwise/counter-clockwise until a
click is heard to turn the radio on/off
Adjusting the Volume
After turning the radio on, rotate the Radio On-Off/Volume Control knob clockwise
to increase the call volume, or counter-clockwise to decrease it.
Selecting a Channel
After turning the radio on, rotate the Channel Selector knob to select a desired
channel.
Switching the Channel Mode
Each channel can be programmed as either analog channel or digital channel. If the
current zone includes both analog and digital channels, the user can quickly switch
between digital and analog through the Channel Selector knob.
Call
To ensure optimal volume of the receiving radio, hold the palm microphone
approximately 2.5 to 5 centimeters away from your mouth. You may transmit a
Private Call through any of the following methods.
1. Transmitting a call to the preset contact
In the home screen, hold down the PTT key to transmit a Private Call to the Private
Call contact preset for the current channel.
2. Transmitting a call through Contact List or Call Logs
3. Through manual input
After a Private Call is received, you may hold down the PTT key within the preset
time period to call back. If you do not respond to it, your radio will provide
92
Page 97
Hytera DMR System Planner
appropriate indications.
Group Call
You may transmit a Group Call through any of the following methods.
1. Transmitting a call to the preset contact
In the home screen, hold down the PTT key to transmit a Group Call to the Group
Call contact preset for the current channel.
2. Transmitting a call through Contact List
3. Through manual input
After a Group Call is received, hold down the PTT key within the preset time period
to call back.
All Call
Two methods are available for transmitting an All Call: transmitting a call to the
preset contact; transmitting a call through Contact List. Please note that you cannot
respond to an All Call.
Calls on Analog Channels
To transmit a call, hold down the PTT key and speak into the microphone. To receive,
release the PTT key.
Status Indication
The top LED indicator will help you easily identify the current radio status described
below:
LED Indication Radio Status
LED flashes green. Powering on
LED glows red. Transmitting
LED glows green. Receiving
LED flashes orange slowly. Scanning
LED flashes orange rapidly. Emergency
After voice communication ends, you can
LED glows orange.
hold down the PTT key to talk while the
LED is glowing orange.
In addition, the radio status can also be identified via the alert tones, which can be
customized via the CPS. For the display model, related status indication will also be
displayed on the LCD.
93
Page 98

Hytera DMR System Planner
Menu
Besides key operations, you can also set and operate the radio via the menu. The
menu in our radio mainly includes the following items:
Contact List
Text Message
Call Logs
Scan
Zone
Settings
Accessories
For details, please refer to the corresponding owner’s manual.
Numeric Keypad
The display model is designed with a numeric keypad, allowing the user to dial
numbers and edit messages. However, the non-display model is not designed with
any numeric keypad.
Auxiliary Features
The radio can be programmed via the CPS to provide various auxiliary features
such as Radio Check, Remote Monitor, Radio Enable and Radio Disable.
Accessory
A GPS module can be integrated into the antenna of the radio, to provide the
positioning service. Via a third-party software, the radio with the GPS module can be
positioned. The radio can work with an antenna with or without the GPS module.
GPIO Port
The radio has a 16-pin GPIO interface, which supports various features. This
interface can be used to connect the earpiece, to receive calls and to collect the
audio signals via the microphone on the earpiece for transmission. In addition, it can
be used to connect the PC via a USB cable, to program the radio. The pins of the
GPIO interface can be programmed to realize features such as Telemetry and
Unmute.
Programmable Features for GPIO Port
For the portable radio, only PIN11 can be programmed with the following features:
No. Programmable Feature Description
1 Telemetry VIO1 This pin is set to Telemetry VIO1.
2 Speaker Open Detect
The pin will output an active level when the speaker is
detected unmuted.
94
Page 99

Hytera DMR System Planner
3.2 Mobile Radio
The mobile radio is designed to work in the vehicle and powered by the vehicle’s
battery. It works at 13.6V ± 15% with negative end grounded. The product can
operate in either analog or digital mode. Compared with the portable radio, the
mobile radio extends the communication coverage. The communication distance of
this mobile radio in the direct mode can reach to 3-5 kilometers. The mobile
radio is equipped with the display. It is highly recommended to program the mobile
radio properly before installing in the vehicle.
Currently, the mobile radio (MD78X series) is currently available in the following
frequency range.
Model Frequency Band
MD78X V1 U1 U2 U3 U5
MD78XG V1 U1 U2 U3 U5
95
Page 100

Hytera DMR System Planner
3.2.1 Product Overview
Front Panel
3.2.1-1 Front Panel
No. Part Name No. Part Name
1
3 LCD Display 4 OK/Menu Key
5 Back Key 6 Power On/Off Key
7 Up Key 8 Down Key
9 Speaker 10 Programmable Keys
11 Microphone Jack 12
Volume Control / Channel
Selector Knob
2 LED Indicator
Microphone Installation
Index
96
 Loading...
Loading...