

Page 1

Thick metal cutting techniques
For HPR400XD™ and HPR800XD plasma cutting systems
White paper
Introduction
Using plasma to successfully cut thick metal requires more
skill and technique than using plasma on thinner metal. The
thick metal cutting techniques described in this document
may be needed from the beginning of the cut with an edge
start all the way to finishing the cut with a completely
severed part.
Note: Unless otherwise specified, for the purposes of this document,
thick metal consists of stainless steel and aluminum from 5 inches to
6.25 inches (125 mm to 160 mm) thick. The techniques detailed in this
document were developed using 304L stainless steel. Materials used for the
development of this white paper were based on U.S. customary units
(inches). Metric conversions are provided for reference.
This document describes thick metal cutting techniques
developed for the HPR800XD that can help manage the
large plasma lag angles associated with thick metal cutting.
It also describes the timing and sequencing needed to be
successful in piercing up to 4 inches (100 mm) stainless
steel and 3 inches (75 mm) aluminum. This document is
broken into four sections:
• Thick metal cutting techniques overview on page 2 is an
overview of different lag angle management techniques for
thick metal cutting that covers a plasma cut from the
beginning to completion.
• Dogleg lead-out details for thick stainless steel on page 4
covers the details of a special lead-out technique (known as
the dogleg or acute angle lead-out) that can allow you to
completely sever a stainless steel part up to 6.25 inches
(160 mm) thick.
• Stationary piercing (up to 3-inch stainless steel and
aluminum) on page 8 describes the timing and sequence to
be followed to perform stationary piercing on 3 inch
(75 mm) stainless steel and aluminum.
• Moving pierce technique (up to 4-inch stainless steel) on
page 10 describes a moving pierce technique for thick
stainless steel that can be used with both the HPR800XD
and the HPR400XD. This technique, combined with
PowerPierce
the HPR800XD to 4 inches (100 mm) and for the
HPR400XD to 3inches (75mm).
®
technology, extends the pierce capacity for
Page 2
Thick metal cutting techniques overview
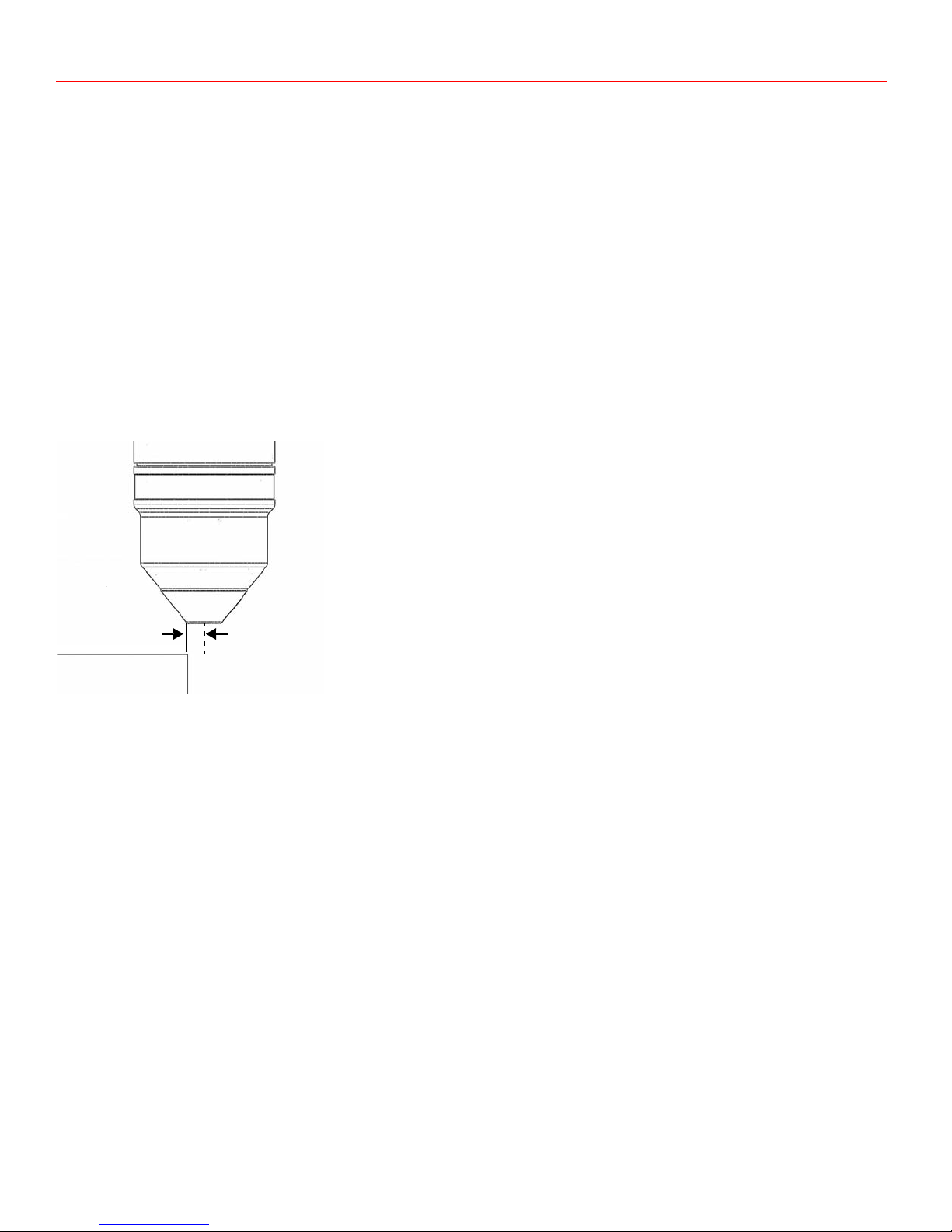
Approximately 0.25 inches (6 mm)
Edge start
Positioning
Proper positioning of the torch is important to allow the
molten metal (or melt) to carry down the majority of the
thickness (especially when starting on a rough edge). Set
the height of the torch to the cut height listed in the cut
chart, which you can find in the Operation section of the
HPR800XD Instruction Manual (806500 [Auto Gas] or
806490 [Manual Gas]). Place the torch center-line about
0.25 inches (6 mm) from the workpiece edge. The edge of
workpiece should be approximately lined up with the shield
face diameter, as shown in Figure 1.
Figure 1 – Edge start positioning
Initial cut speed (lead-in speed)
A reduced cut speed should be used for at least the first
1 inch (25 mm) of the cut before traveling at the full cut
speed. The recommended initial cut speed should be 75%
of the full cut speed.
Cornering
Special cornering considerations may be necessary when
working with thick metal due to the extreme lag of the tail
(bottom portion) of the arc. If no technique is used, the cut
edge may lose its form, especially near the bottom of the
cut. Use one of the following methods:
• Rounding corners
•Corner delay
• Corner slow-down
Rounding corners
One method to maintain edge form is to round off corners of
90 degrees or less. In general, the radius should be equal to
or greater than the kerf value (larger is better).
Motion (or pierce) delay
An adequate motion delay must be used to allow enough
time for the arc to melt the majority of the edge prior to
motion being initiated. Suggested motion delays for 800 A
thick metal cutting are listed in the cut charts in the
HPR800XD Instruction Manual. These times may need to
be adjusted based on your application.
Corner delay
Allow the motion to dwell in the corner for approximately one
second to allow the arc tail to “catch up.”
Corner slow-down
Approximately 1 inch (25 mm) before entering the corner,
slow down the cut speed to 75% of the full cut speed.
Maintain 75% of the cut speed for approximately 1 inch
(25 mm) after the corner before resuming the full cut speed.
2
Page 3
Completing the cut
Dogleg lead-out region
Lead-in
Part
One of the following techniques may be necessary on metal
5 inches (125 mm) thick or greater to fully complete the cut.
Otherwise, the arc may jump the very bottom portion of the
cut as it exits the edge of the metal or enters the kerf,
resulting in an incomplete sever of the cut piece.
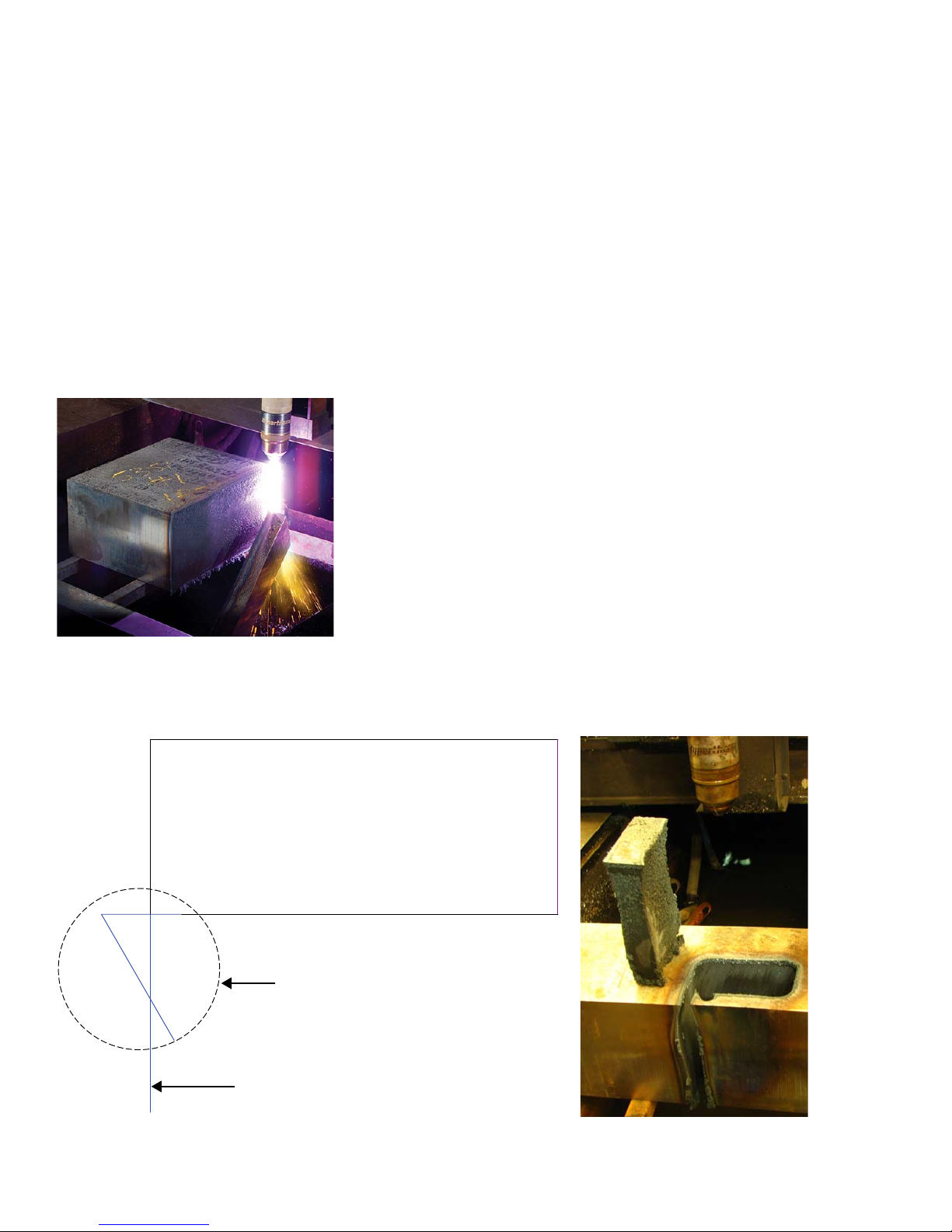
Exiting the edge of material (lead-out speed)
For cuts that involve the arc exiting the edge of the material
(as shown in Figure 2), a reduced cut speed should be used
for the last 1 inch (25 mm) of the cut. The recommended
final cut speed should be 75% of the full cut speed. The
cutting table must continue motion beyond the edge of
the plate.
Figure 2 – Lead-out exiting the edge of the material
External contour part cut (dogleg or acute angle lead-out)
The dogleg (or acute angle) lead-out technique can be used
to redirect the tail of the arc and the molten metal flow into
the remaining portion of the cut (or “tab”), thereby allowing
for a complete cut (see Figure 3 and Figure 4).
1 Follow the edge start, lead-in, and cornering
recommendations previously listed.
2 Cut the external contour of the part and approach lead-out.
3 Just as the arc breaks through to kerf, change the cut
direction by approximately 120 degrees into the skeleton at
115% of the cut speed.
4 Continue the lead-out segment for approximately
1.25 inches (32 mm) – the molten metal flow from cutting
into the skeleton melts the tab, which completes the cut and
allows the part to “drop.”
Dogleg lead-out details are included in the Dogleg lead-out
details for thick stainless steel section in this document.
Figure 3 – Example of dogleg lead-out programmed cut path Figure 4 – 6 inch (150 mm) “dropped” external
contour cut
3
Page 4

Dogleg lead-out details for thick stainless steel
Location of tab
Proper lead-out for thick material is critical to completely
sever a part; otherwise, a small tab may keep the part
attached to the skeleton at the point where the lead-out
enters the lead-in (as shown in Figure 5).
Figure 5 – Example of a “tab” in a thick stainless steel contour cut
This tab is due to the extreme lagging tail of the arc, the lack
of molten material flowing through the kerf, and the
insufficient voltage to maintain the arc attachment at this
distance from the torch. Crossing the kerf for the thickest
materials may not be possible for the same voltage limitation
reason, and even if the arc does transfer to the opposite
side of the kerf, the arc tail is likely to jump over the tab.
The dogleg method for stainless steel takes advantage of
this lagging arc by focusing it onto the tab section of the
cut. At the point where the leading kerf edge breaks into the
lead-in edge (and before the voltage reaches the critical
value of the transformer), the cut path changes direction into
an acute angle (60 degrees works well) toward the skeleton
(see Figure 6). This allows the arc to transfer to the skeleton
material, which reduces the voltage while driving the molten
material down towards the tab and subsequently melting it
off.
4
Page 5
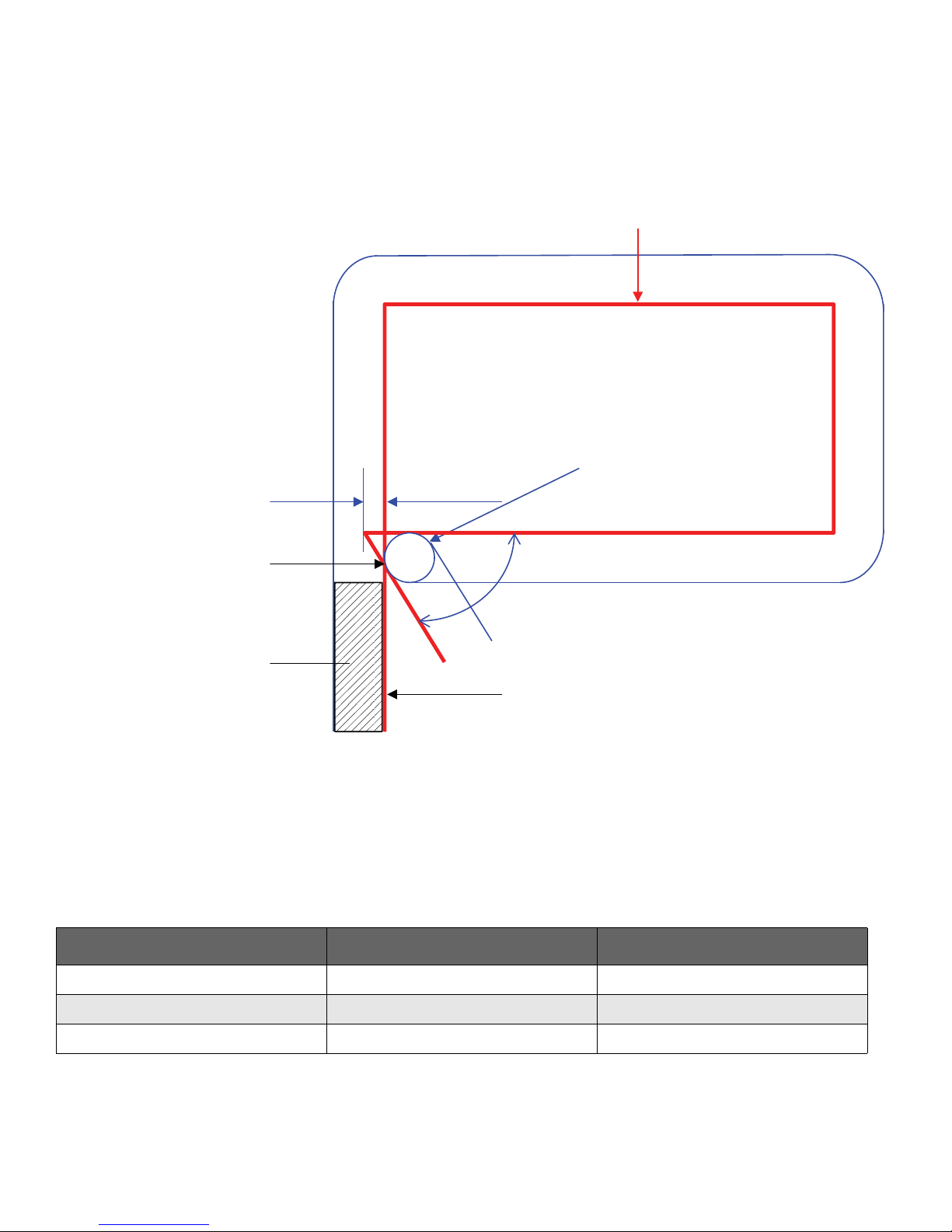
Overshoot
Lead-in
Leading kerf edge
Overshoot distance
Kerf width (K)
Lead-in edge
α
Programmed path
1
2
α
2
---
tan
------------------------ -
1
2
---
– Correction+
In order for the leading kerf edge to enter the lead-in edge
(with kerf compensation active), the programmed path must
overshoot by some distance (see Figure 6).
Figure 6 – Overshoot definition
This overshoot distance can be calculated using the
following equation:
Overshoot = K
Tabl e 1 – Correction factors.
Thickness Kerf Correction Factor
5 inches (125 mm) 0.530 inches (13.43 mm) 0.30
6 inches (150 mm) 0.680 inches (17.27 mm) 0.25
6.25 inches (160 mm) 0.700 inches (17.78 mm) 0.25
As an example, if α = 60° for a thickness of 6 inches, the
overshoot value is:
where K is kerf, α is angle, and Correction is an additional
factor necessary to ensure adequate penetration of the arc
into the lead-in section. The Correction factor values for
5–6.25 inches (125–160 mm) are shown in Ta bl e 1 .
K(0.866-0.5+0.25) = 0.68(0.616) = 0.419 inches
5
Page 6

First segment and geometry limitation
K
2
α
2
---
tan
------------------------ -
A geometric limitation was found during the development of
the dogleg method that resulted in a “Kerf Too Large” CNC
error message. This limitation had to do with the length of
the first segment approaching the 60-degree corner of the
dogleg (refer to the first segment, highlighted in green, in
Figure 7 on page 7).Essentially the first segment length has
to be long enough that, at a minimum, the kerf right-hand
side enters this segment.For the 6 inch (150 mm) thickness
the minimum length is 0.589 inches (14.96 mm) or
First Segment =
where K is kerf and α is angle.
Assuming 60 degrees, the minimum length of the first
segment would have to be:
• 0.459 inches (11.66 mm) for 5 inches (125 mm) stainless
steel, based on 0.530 inches (13.46 mm) kerf
• 0.607 inches (15.42 mm) for 6.25 inches (160 mm)
stainless steel, based on 0.700 inches (17.78 mm) kerf
It is recommended that a value larger than the minimum
length be used to allow minor adjustments to the kerf value
(for part dimension adjustment) without causing a geometric
“Kerf Too Large” error.
Second and third segments
It was found that an increased speed during the second
segment was useful to minimize the time it takes for the arc
to reattach to the opposite side of the kerf, which minimizes
any voltage spikes. Therefore, for the second segment the
feed rate should be increased to 400% of the cut speed,
after which, during the third segment, it should be slowed
down to 115% of the cut speed. This last section of the
move (or third segment) is where the tab will finally be
melted. Ta bl e 2, together with Figure 7, summarizes the
parameters for stainless steel thicknesses of 5 inches
(125 mm), 6 inches (150 mm), and 6.25 inches (160 mm).
6
Page 7
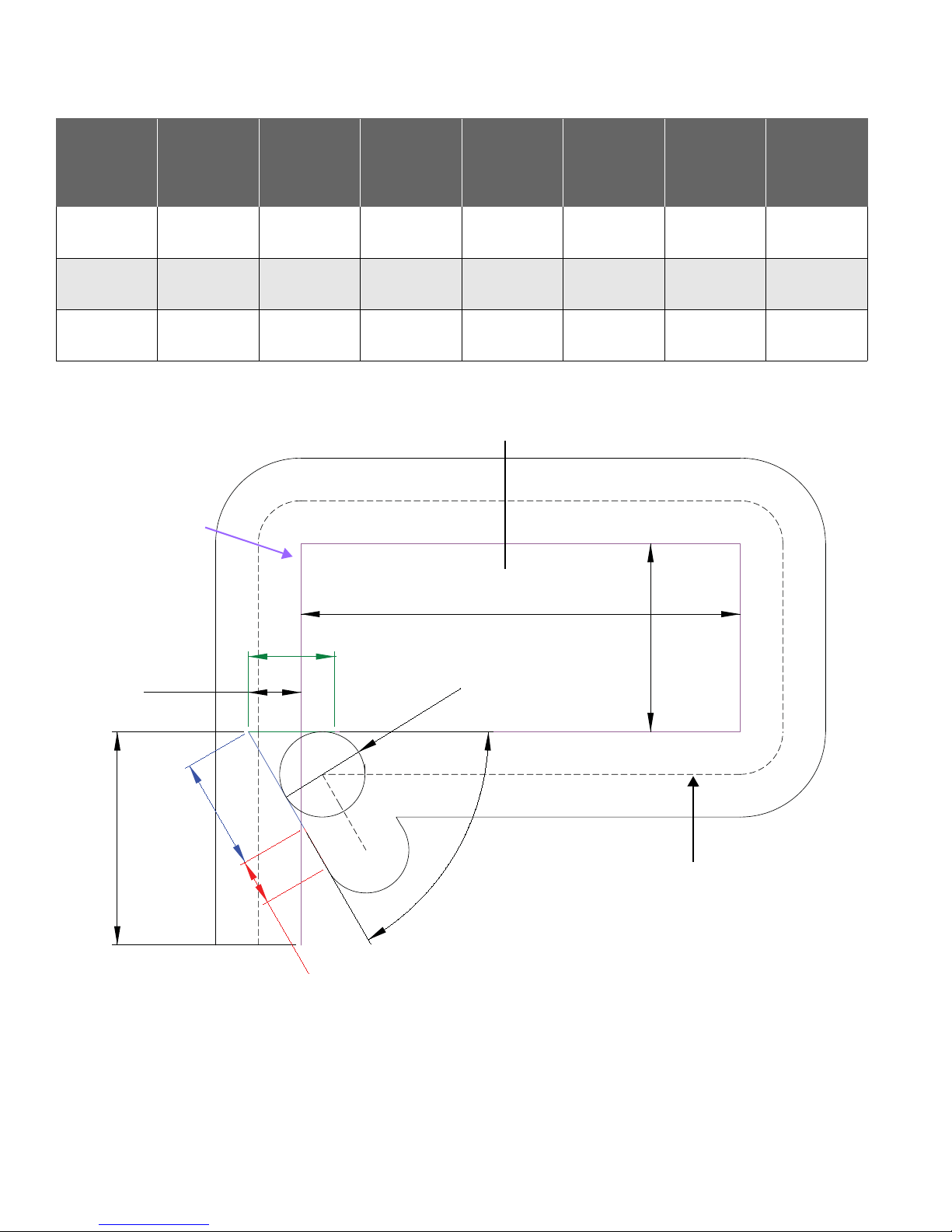
Tabl e 2 – Dogleg parameters for 5 inch (125 mm), 6 inch (150 mm), and 6.25 inch (160 mm) stainless steel
Part
3.50 inches (88.9 mm)
Programmed cut path
First segment
60º
Second segment
Lead-in
Kerf compensated cut path
Overshoot
Third segment
Kerf
1.50 inches
(38.1 mm)
Thickness Lead-in length Kerf Angle
5in
(125 mm)
6in
(150 mm)
6.25 in
(160 mm)
1.5 in
(38 mm)
1.75 in
(45 mm)
1.75 in
(45 mm)
0.530 in
(13.46 mm)
0.680 in
(17.27 mm)
0.700 in
(17.78 mm)
Figure 7 – Dogleg (acute angle) lead-out geometry
60° ≥0.459 in
60° ≥0.589 in
60° ≥0.607 in
Calculated first
segment
minimum length
at cut speed
(≥11.66 mm)
(≥14.96 mm)
(≥15.42 mm)
Overshoot length
0.353 in
(8.97 mm)
0.419 in
(10.64 mm)
0.431 in
(10.95 mm)
Second segment
length at 400%
cut speed
0.720 in
(18.29 mm)
0.888 in
(22.56 mm)
0.911 in
(23.14 mm)
Third segment
length at 115%
cut speed
0.307 in
(7.80 mm)
0.362 in
(9.19 mm)
0.334 in
(8.48 mm)
7
Page 8

Stationary piercing (up to 3-inch stainless steel and aluminum)
Piercing thicknesses over 2 inches (50 mm) has been
challenging in the past. As a result of the PowerPierce
technology incorporated into the HPR800XD, piercing up
to 3 inches (75 mm) is easily achievable with stainless steel
and aluminum. The torch lifter must have the capability of
using transfer height, pierce height, and cut height
settings.
Pierce control (or pierce complete) signal
High amounts of shield flow during the piercing operation
can be helpful in:
• Clearing the molten pool of metal away from the pierce hole
• Deflecting slag away from the torch
• Cooling the shield
Normal gas operation for HPRXD power supplies switches
both the plasma and the shield gases from preflow to
cutflow as soon as arc transfer is sensed. HPRXD power
supplies incorporate a “pierce control” signal that, when
turned on, delays the switching of the shield flow from
preflow to cutflow until after the pierce delay has expired.
For any HPRXD process with the shield preflow setting
higher than the shield cutflow setting, the pierce control
signal must be turned ON. Conversely, for any HPRXD
process with the shield preflow setting lower than the shield
cutflow setting, the pierce control signal must be turned
OFF. For the 600 A and 800 A processes, the pierce
control signal must be turned OFF. For HPRXD
processes where the shield preflow setting is equal to the
shield cutflow setting, it does not matter whether the pierce
control signal is turned on or off.
Move to transfer height
Position the torch to the transfer height as listed in the cut
chart (by process and metal thickness).
Note: You can find the cut charts in the Operation section of the
HPR800XD Instruction Manual.
Initiate arc transfer
Initiate the arc firing sequence. The arc will extend from the
torch and transfer to the surface of the plate.
Pull torch back from plate to pierce height
Immediately after arc transfer, move the torch to the pierce
height as listed in cut chart.
Allow arc to penetrate material
Remain stationary for the duration of the pierce delay as
listed in the cut chart. The arc should be fully through the
plate prior to initiating motion. Some adjustment may be
necessary to the pierce delay based on the material type
and the condition of the consumables in the torch.
Initiate motion into part lead-in
Maintain the torch at the pierce height and begin motion into
the part lead-in. Drop the torch to the cut height before the
end of the lead-in section. Lead-in lengths may vary, but as a
general rule lead-in length should be equal to the material
thickness to ensure the pierce puddle has been cleared
prior to initiating the cut.
Cut the part
Initial height sense
Position the torch over the pierce location and command the
torch lifter to perform the initial height routine. Refer to the
timing diagram (Figure 8 on page 9).
8
Finally, complete the contour cut of the part.
Page 9

9
Figure 8 – Stationary pierce timing diagram
7
8
9
1
0
1
2
3
4
5
6
1
2
1
1
1
3
Time
Torch height
1 Pierce height
2 Transfer height
3 Cut height
4 Initial height sense
5 Arc transfer, shield flow switches from preflow to cutflow
6 Arc penetrates plate
7 Motion begins
8 Torch drops to cut height prior to beginning contour cut
9 Move to transfer height
10 Pierce delay
11 Move to pierce height
12 Lead-in
13 Move to cut height
Page 10

Moving pierce technique (up to 4-inch stainless steel)
Pierce capacity can be extended by utilizing a technique
known as “moving pierce.” This technique combined with
PowerPierce
®
technology has extended the stainless steel
pierce capacity for the HPR800XD to 4 inches (100 mm)
and for the HPR400XD to 3 inches (75 mm).
The torch lifter must have the capability to use transfer
height, pierce height, and cut height settings along with cut
height and automatic voltage control (AVC) delays. The
cutting table and controller must be able to allow motion
upon transfer. Hypertherm’s EDGE
Phoenix™ 9.72 or later), Sensor™ THC or ArcGlide
and ProNest
®
nesting software all support this technique
®
Pro controller (running
®
lifter,
with the provided parameters.
Basic description
Moving pierce (also known as a running pierce or flying
pierce) is a technique that has been used by plasma
operators for years in order to have their plasma systems
penetrate thick plates without having to resort to other
operations such as drilling.
The method of moving pierce described here utilizes a
synchronization of torch lifter positioning, table motion, and
plasma current ramping to achieve a relatively short pierce
lead-in that directs the molten material to the side and away
from the torch. At the same time, it keeps the torch as far
away from the molten material as possible while also
maintaining an arc voltage that the HPRXD power supply
can sustain.
plasma cutting operations). Moving pierce direction should
be planned such that the molten material is not directed at
the lifter, gantry, adjacent torches, controller, or other
sensitive equipment.
Note: The moving pierce parameters in this document were developed
using linear motion only.
Molten material accumulated on the plate can impact
subsequent cutting paths, so you may be required to either
carefully plan cutting paths that avoid the slag pile or to stop
the cutting process (after the arc has penetrated the plate)
to scrape the slag pile from the plate.
Lifter and table motion sequencing
During the moving pierce, both the torch height and the
table motion are simultaneously controlled to optimize the
thick plate piercing capability. The details for a typical pierce
are listed in the following Lifter sequence and Table moti o n
sequence sections.
Lifter sequence
Refer to Figure 9 for an illustration of the following
sequence.
1 An initial height sense (IHS) is performed, and the torch is
positioned at the transfer height.
2 The torch is started and transfers to the workpiece; current
ramp-up begins.
The basic process consists of combining motion during
piercing to create a trough in the plate that can then be
used as an evacuation channel for the molten material to be
directed out of the deepening pierce “slot.” The molten
material is directed to the side of the torch in the opposite
direction of the table motion, with the majority being
deposited onto the top of the plate surface. Once the arc
penetrates the plate the standard settings for cutting can be
used.
Limitations and equipment and safety hazards
Using this technique results in a “rooster tail” of molten
material and hot gases that can cause personal injury,
damage to equipment, and fires if proper precautions are
not taken. Guards may be required to protect operators and
to prevent the molten material from reaching any flammable
materials (flammable materials should be kept away from
3 After transfer, the torch quickly moves to the pierce height,
and the table motion begins at the first speed programmed
using an embedded “F” code. (See Table motion sequence
on page 12.)
4 The torch is maintained at the pierce height until the
moving delay has expired (percentage of the total pierce
delay).
5 When the moving delay has expired, the torch will move to
the pierce end height. This move is timed to arrive at the
end height when the pierce delay has expired.
6 The torch will remain at the pierce end height for the
duration of the cut height delay. When the cut height
delay expires, the torch will move to the cut height and will
remain at this height until the moving pierce (MP) AVC
delay expires.
7 When the MP AVC delay expires, the arc voltage control will
begin.
8 The contour cut of the part is completed.
10
Page 11

Figure 9 – Moving pierce torch height timing diagram
Torch height
7
8
9
1
0
1
2
3
4
5
6
1
1
1
2
1
3
141
4
1
5
1
7
1
6
1
8
Time
1 Pierce height
2 Pierce end height
3 Transfer height
4 Cut height
5 Initial height sense
6 Arc transfer, motion begins, shield flow switches from preflow to cutflow
(if preflow is lower than cutflow)
7 Torch begins to lower toward pierce end height
8 Torch reaches pierce end height as pierce delay expires
9 Torch lowers to cut height as cut height delay expires
10 AVC begins as MP AVC delay expires prior to starting cut
11 Move to transfer height
12 Pierce delay
13 Moving delay
14 Move to pierce height
15 Cut height delay
16 Arc penetrates plate in this region
17 MP AVC delay
18 Move to cut height
11
Page 12
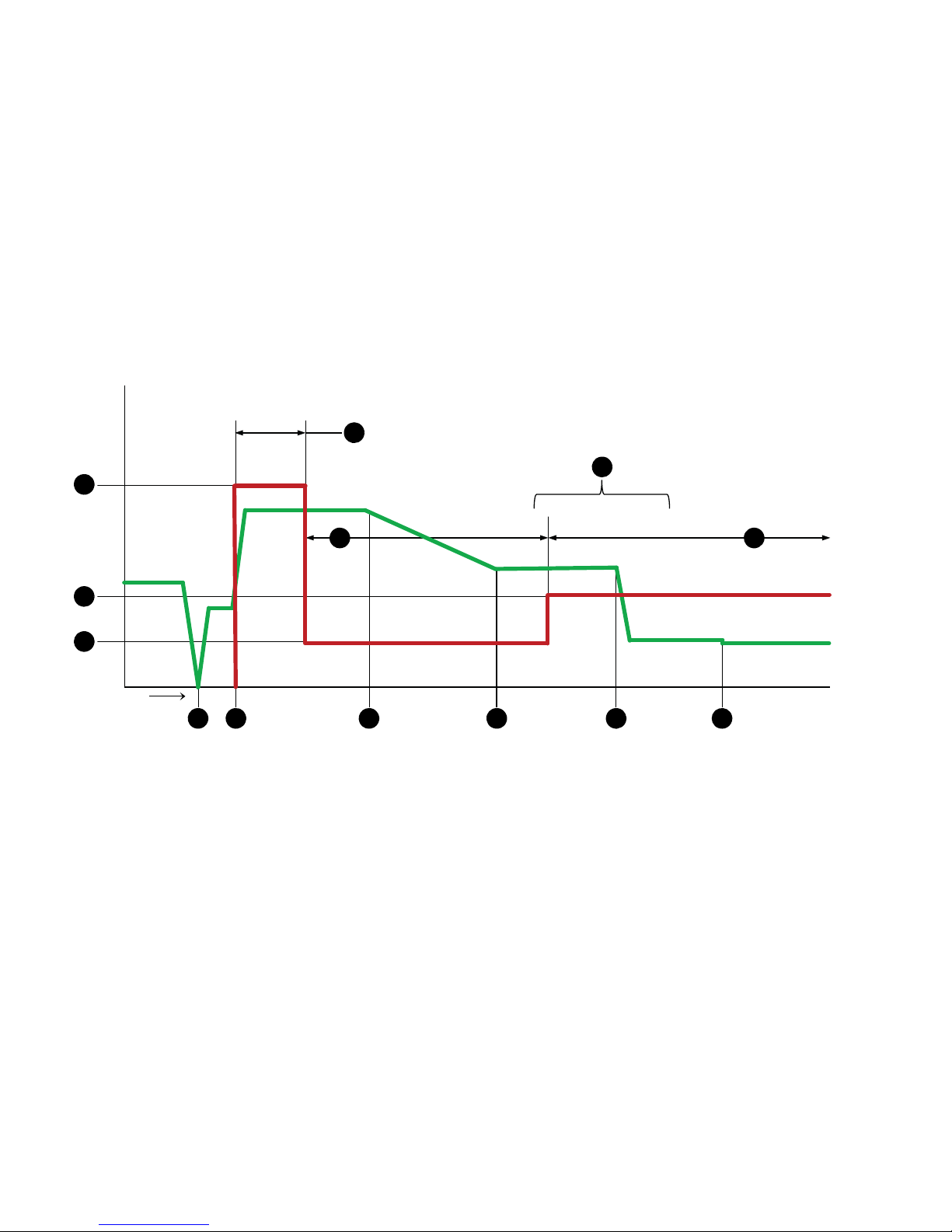
Table motion sequence
Feed rate
7
8
9
1
0
1
2
3
45
6
Time
1
2
1
1
1
3
1 Gouge speed
2 Cut speed
3 Creep or intermediate speed
4 Initial height sense
5 Arc transfer, motion begins, shield flow switches from preflow to cutflow
(if preflow is lower than cutflow)
6 Torch begins to lower toward pierce end height
7 Torch reaches pierce end height as pierce delay expires
8 Torch lowers to cut height as cut height delay expires
9 AVC begins as MP AVC delay expires prior to starting cut
10 Establishes evacuation trough
11 Penetration of plate advances while molten material is evacuated via trough
12 Arc penetrates plate in this region
13 Transition to cut speed as arc penetrates plate
Refer to Figure 10 for an illustration of the following sequence.
1 After transfer, the table motion begins for the first segment at a fast gouge
speed (the first “F” code) for the required segment length necessary to
establish the evacuation channel (or trough).
2 The second segment table motion begins at an intermediate speed (second
“F” code) for the required segment length necessary to penetrate the plate.
3 The third segment of table motion begins at the programmed cut speed. The
remainder of the cut is completed at this speed (third “F” code).
4 Finally, the contour cut of the part is completed.
Figure 10 – Moving pierce table motion timing diagram
12
Page 13
Embedded part program parameters
If you are using the EDGE Pro controller, use the following list of parameters to
control the moving pierce (MP) sequence.
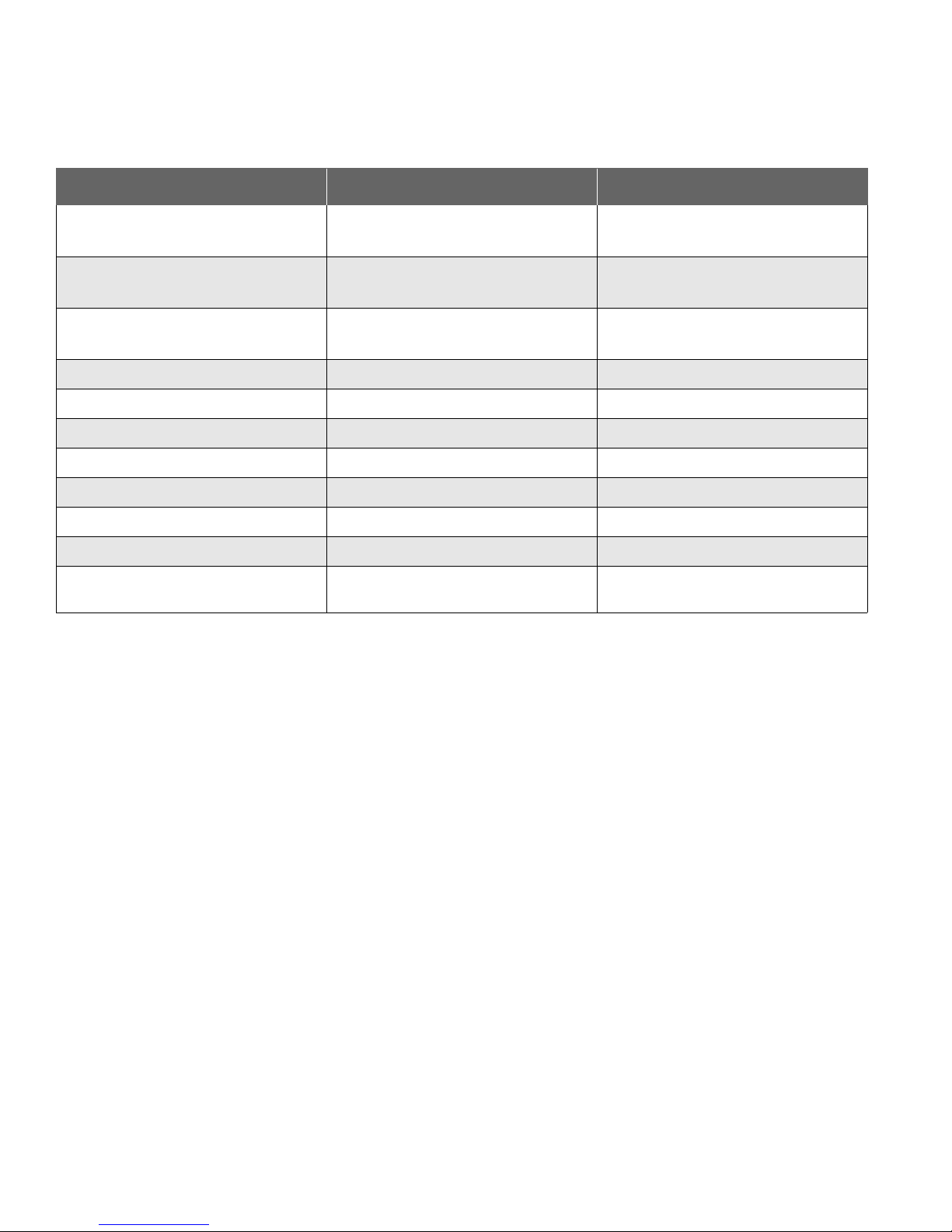
Tabl e 3 – Moving pierce (MP) embedded part program parameters
Parameter name Embedded program code Description
MP feed #1 - fast gouge F45
G01 X0 Y1
MP feed #2 - intermediate F20
G01 X0 Y0.5
MP feed #3 - cut speed F10
G01 X0 Y2.5
Transfer height factor G59 V604 F300 Transfer height = 300% of cut height
Pierce delay G59 V601 F8.0 Total pierce delay = 8.0 seconds
Moving delay (lifter) G59 V610 F50 Percent moving delay = 50% of pierce delay
Pierce height factor G59 V602 F500 Pierce height = 500% of cut height
Pierce end height factor G59 V611 F250 Pierce end height = 250% of cut height
Cut height delay G59 V605 F3.0 Cut height delay = 3.0 seconds
Cut height G59 V603 F0.25 Cut height = 0.25 inches (6 mm)
MP AVC delay M51T15 MP AVC delay = 4 seconds (the M51T value is the sum of
Speed=45ipm (1143mm/m)
Move 1 inch (25 mm) Yaxis
Speed = 20 ipm (508 mm/m)
Move 0.5 inch (13 mm) Yaxis
Speed = 10 ipm (254 mm/m)
Move 2.5 inch (65 mm) Y axis
MP AVC delay, cut height delay, and pierce delay)
13
Page 14

14
Thick stainless steel moving pierce parameters
The following tables contain the moving pierce parameters (both English and metric) that have been developed for
piercing up to 4 inches (100 mm) of stainless steel.
Tab le 4 – Thick stainless steel moving pierce (MP) parameters – English
Process
Thickness
(inch)
Speed 1
(ipm)
Speed 2
(ipm)
Speed 3
(ipm)
Segment 1
(inch)
Segment 2
(inch)
Segment 3
(inch)
Transfer Height Factor
(% Cut Height)
Pierce Delay
(Seconds)
Percent Moving Delay
(% Pierce Delay)
Pierce Height Factor
(% Cut Height)
Pierce End Height Factor
(% Cut Height)
Cut Height Delay
(Seconds)
Cut Height
(inch)
MP AVC Delay
(Seconds)
800 A
H35/ N
4406112 11.515065047527580.52
400 A
H35-N/ N
3 45 20 10 0.998 0.417 2.5 300 8 50 500 250 3 0.25 4
400 A
H35-N/ N
2 45 15 20 0.75 0.417 1.5 300 4.8 50 500 25 0 0.5 0.25 5.7
Tab le 5 – Thick stainless steel moving pierce (MP) parameters – metric
Process
Thickness
(mm)
Speed 1
(mm/m)
Speed 2
(mm/m)
Speed 3
(mm/m)
Segment 1
(mm)
Segment 2
(mm)
Segment 3
(mm)
Transfer Height Factor
(% Cut Height)
Pierce Delay
(Seconds)
Percent Moving Delay
(% Pierce Delay)
Pierce Height Factor
(% Cut Height)
Pierce End Height Factor
(% Cut Height)
Cut Height Delay
(Seconds)
Cut Height
(mm)
MP AVC Delay
(Seconds)
800 A
H35/ N
100 1016 152 279 50.8 25.4 38.1 150 6 50 475 275 8 12.7 2
400 A
H35-N/ N
75 114 3 508 254 25.3 10. 6 63.5 300 8 50 500 250 3 6.4 4
400 A
H35-N/ N
50 1143 381 508 19.1 10.6 38.1 300 4.8 50 500 250 0.5 6.4 5.7
Page 15

Sample EDGE Pro code for 400 A – 3-inch (75-mm) stainless steel
The following sample code from a Hypertherm EDGE Pro CNC assumes the
use of U.S. customary units (inches) and is intended to provide an example of
the codes that may be used to perform a moving pierce on a 3-inch (75-mm)
stainless steel plate at 400 A.
G99 X1 Y180 I0 J0
G20 (select English units [inches])
G91 (incremental programming mode)
G43X0.265 (kerf value = 0.265 inches)
G41 (enable left kerf compensation)
G59 V502 F35 (plasma torch/consumable type)
G59 V503 F2 (material type)
G59 V504 F400 (current setting)
G59 V505 F23 (plasma/shield gas type)
G59 V507 F58 (material thickness)
G59 V600 F202 (arc voltage)
G59 V601 F8 (pierce delay)
G59 V602 F500 (pierce height factor)
G59 V603 F0.25 (cut height)
G59 V604 F300 (transfer height factor)
G59 V605 F3 (cut height delay)
G59 V610 F50 (moving delay = 50%)
G59 V611 F250 (pierce end height = 250%)
M07 (plasma start)
M51T15 (MP AVC delay = 4)
(Add pierce delay, cut height
delay, and AVC delay)
F45 (gouge speed)
G01 X0 Y.9975 (linear motion)
F20 (creep speed)
G01 X0 Y.4166 (linear motion)
F10 (cut speed)
G01 X0 Y2.5 (linear motion)
M08 (plasma stop)
G40 (disable kerf compensation)
M02 (end of program)
15
Page 16
www.hypertherm.com
™
HPRXD, PowerPierce, EDGE Pro, Phoenix, Sensor THC, ArcGlide THC, ProNest, and
Hypertherm are trademarks of Hypertherm Inc. and may be registered in the United States and/or
other countries. All other trademarks are the property of their respective holders.
One of Hypertherm’s long-standing core values is a focus on minimizing our impact on the
environment. Doing so is critical to our, and our customers’ success. We are always striving to
become better environmental stewards; it is a process we care deeply about.
© 6/2014 Hypertherm Inc. Revision 2
807850
 Loading...
Loading...