

Page 1
查询HY29F400供应商
KEY FEATURES
HY29F400
4 Megabit (512Kx8/256Kx16) 5 Volt-only Flash Memory
n 5 Volt Read, Program, and Erase
– Minimizes system-level power requirements
n High Performance
– Access times as fast as 45 ns
n Low Power Consumption
– 20 mA typical active read current in byte
mode, 28 mA typical in word mode
– 30 mA typical program/erase current
– 5 µA maximum CMOS standby current
n Compatible with JEDEC Standards
– Package, pinout and command-set
compatible with the single-supply Flash
device standard
– Provides superior inadvertent write
protection
n Sector Erase Architecture
– Boot sector architecture with top and
bottom boot block options available
– One 16 Kbyte, two 8 Kbyte, one 32 Kbyte
and seven 64 Kbyte sectors in byte mode
– One 8 Kword, two 4 Kword, one 16 Kword
and seven 32 Kword sectors in word mode
– A command can erase any combination of
sectors
– Supports full chip erase
n Erase Suspend/Resume
– Temporarily suspends a sector erase
operation to allow data to be read from, or
programmed into, any sector not being
erased
n Sector Protection
– Any combination of sectors may be
locked to prevent program or erase
operations within those sectors
n Temporary Sector Unprotect
– Allows changes in locked sectors
(requires high voltage on RESET# pin)
n Internal Erase Algorithm
– Automatically erases a sector, any
combination of sectors, or the entire chip
n Internal Programming Algorithm
– Automatically programs and verifies data
at a specified address
n Fast Program and Erase Times
– Byte programming time: 7 µs typical
– Sector erase time: 1.0 sec typical
– Chip erase time: 11 sec typical
n Data# Polling and Toggle Status Bits
– Provide software confirmation of
completion of program or erase
operations
n Ready/Busy# Output (RY/BY#)
– Provides hardware confirmation of
completion of program and erase
operations
n 100,000 Program/Erase Cycles Minimum
n Space Efficient Packaging
– Available in industry-standard 44-pin
PSOP and 48-pin TSOP and reverse
TSOP packages
GENERAL DESCRIPTION
The HY29F400 is a 4 Megabit, 5 volt only CMOS
Flash memory organized as 524,288 (512K) bytes
or 262,144 (256K) words. The device is offered in
industry-standard 44-pin PSOP and 48-pin TSOP
packages.
The HY29F400 can be programmed and erased
in-system with a single 5-volt V
supply. Inter-
CC
nally generated and regulated voltages are provided for program and erase operations, so that
the device does not require a high voltage power
supply to perform those functions. The device can
also be programmed in standard EPROM programmers. Access times as fast as 55 ns over
the full operating voltage range of 5.0 volts ± 10%
are offered for timing compatibility with the zero
wait state requirements of high speed micropro-
Revision 5.2, May 2001
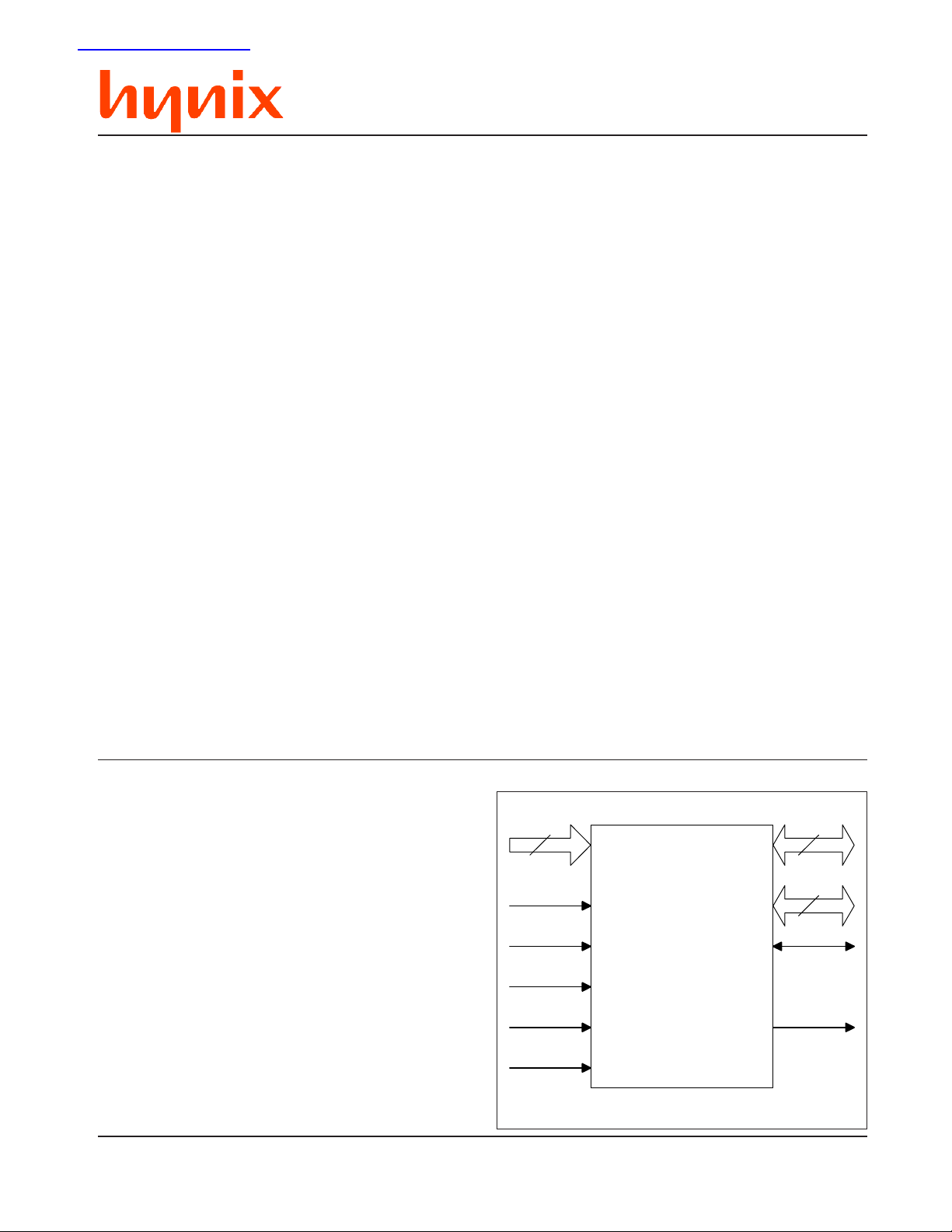
LOGIC DIAGRAM
18
A[17:0]
CE#
OE#
WE#
RESET#
BYTE#
8
DQ[7:0]
7
DQ[14:8]
DQ[15]/A-1
RY/BY#
Page 2
HY29F400
cessors. A 55 ns version operating over 5.0 volts
± 5% is also available. To eliminate bus contention, the HY29F400 has separate chip enable
(CE#), write enable (WE#) and output enable
(OE#) controls.
The device is compatible with the JEDEC single
power-supply Flash command set standard. Commands are written to the command register using
standard microprocessor write timings, from where
they are routed to an internal state-machine that
controls the erase and programming circuits.
Device programming is performed a byte or word
at a time by executing the four-cycle Program command. This initiates an internal algorithm that automatically times the program pulse widths and
verifies proper cell margin.
The HY29F400’s sector erase architecture allows
any number of array sectors to be erased and reprogrammed without affecting the data contents
of other sectors. Device erasure is initiated by
executing the Erase command. This initiates an
internal algorithm that automatically preprograms
the array (if it is not already programmed) before
executing the erase operation. During erase
cycles, the device automatically times the erase
pulse widths and verifies proper cell margin.
To protect data in the device from accidental or
unauthorized attempts to program or erase the
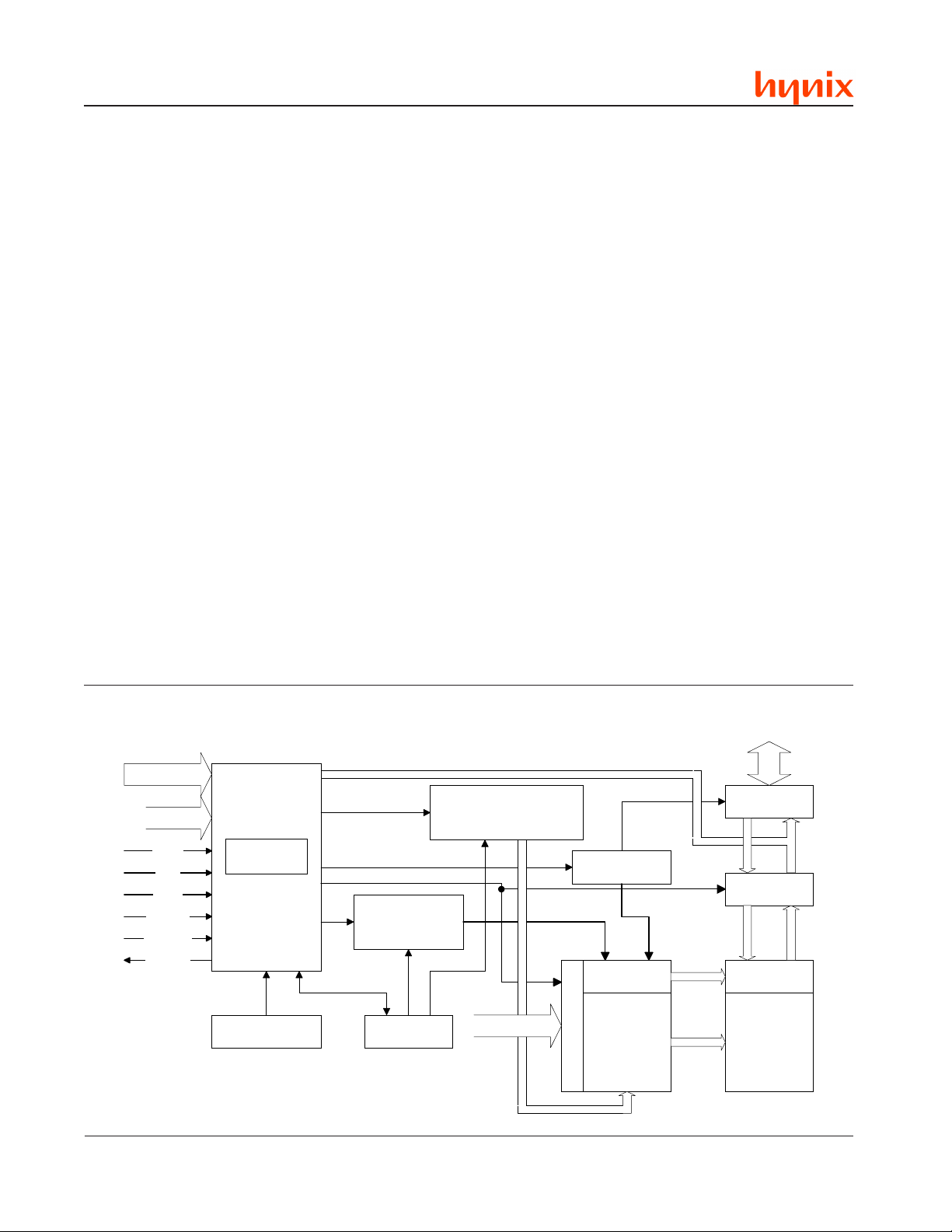
BLOCK DIAGRAM
device while it is in the system (e.g., by a virus),
the device has a Sector Protect function which
hardware write protects selected sectors. The
sector protect and unprotect features can be enabled in a PROM programmer. Temporary Sector Unprotect, which requires a high voltage, allows in-system erasure and code changes in previously protected sectors.
Erase Suspend enables the user to put erase on
hold for any period of time to read data from, or
program data to, any sector that is not selected
for erasure. True background erase can thus be
achieved. The device is fully erased when shipped
from the factory.
Addresses and data needed for the programming
and erase operations are internally latched during
write cycles, and the host system can detect
completion of a program or erase operation by
observing the RY/BY# pin, or by reading the DQ[7]
(Data# Polling) and DQ[6] (Toggle) status bits.
Reading data from the device is similar to reading
from SRAM or EPROM devices. Hardware data
protection measures include a low V
detector
CC
that automatically inhibits write operations during
power transitions.
The host can place the device into the standby
mode. Power consumption is greatly reduced in
this mode.
DQ[15:0]
A[17:0], A-1
DQ[15:0]
WE#
CE#
OE#
BYTE#
RESET#
RY/BY#
2
STATE
CONTROL
COMMAND
REGISTER
PROGRAM
VOLTAGE
GENERATOR
VCC DETECTOR TIMER
ERASE VOLTAGE
GENERATOR AND
SECTOR SWITCHES
A[17:0], A-1
ADDRESS LATCH
I/O CONTROL
Y-DECODER
X-DECODER
I/O BUFFERS
DATA LATCH
Y-GATING
4 Mb FLASH
MEMORY
ARRAY
Rev. 5.2/May 01
Page 3
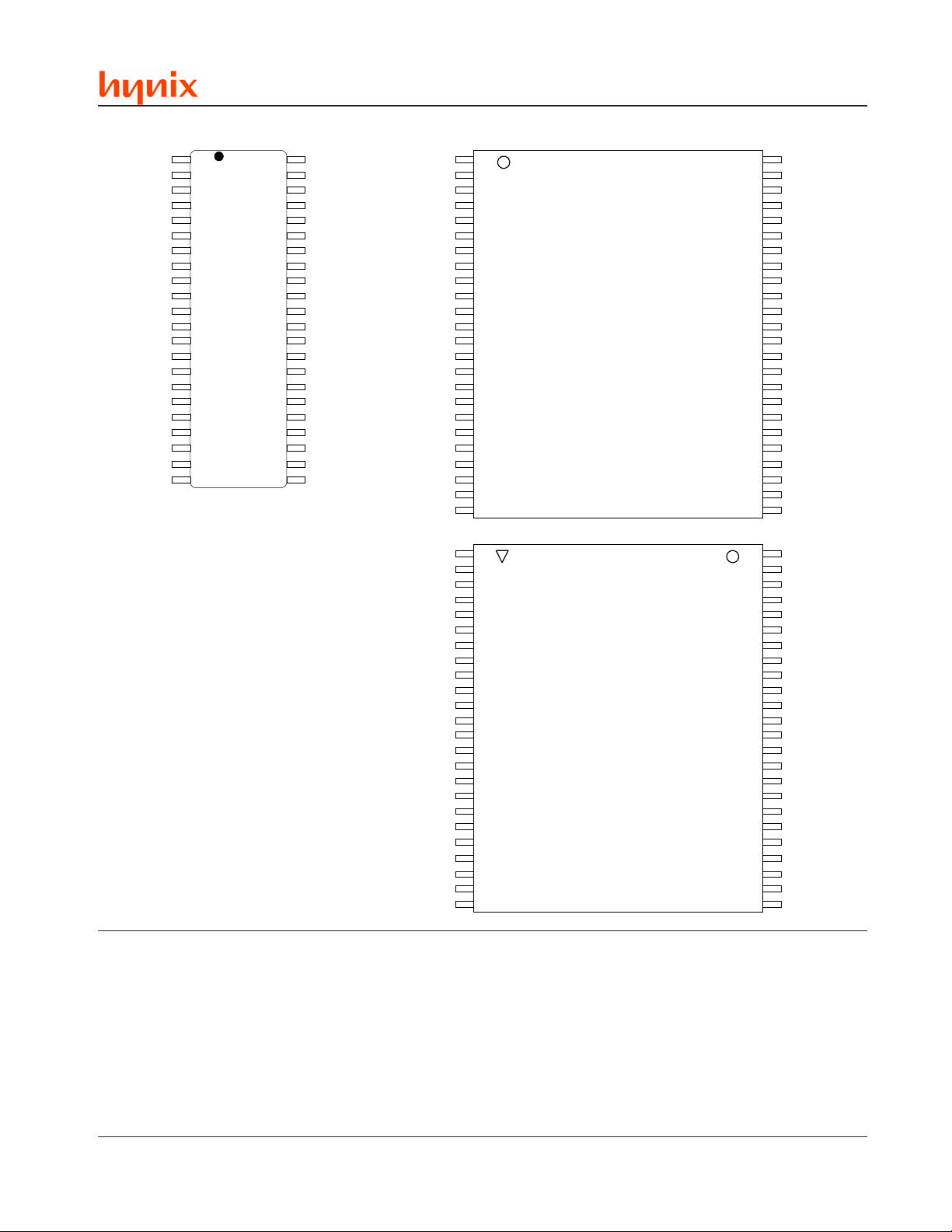
PIN CONFIGURATIONS
HY29F400
NC
RY/BY#12
A17
A7
A6
A5
A4
A3
A2
A1910
A0
CE#1112
V
SS
OE#1314
DQ0
DQ81516
DQ1
DQ91718
DQ2
DQ101920
DQ3
DQ112122
3
4
5
6
7
8
PSOP44
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
RESET#
WE#
A8
A9
A10
A11
A12
A13
A14
A15
A16
BYTE#
V
SS
DQ15/A-1
DQ7
DQ14
DQ6
DQ13
DQ5
DQ12
DQ4
V
CC
A15
A14
A13
A12
A11
A10
A9
A8
NC
NC910
WE#
RESET#1112
NC
NC1314
RY/BY#
NC1516
A17
A71718
A6
A51920
A4
A32122
A2
A12324
A16
BYTE#
V
SS
DQ15/A-1
DQ7
DQ14
DQ6
DQ13
DQ5
DQ12
DQ4
V
CC
DQ11
DQ3
DQ10
DQ2
DQ9
DQ1
DQ8
DQ0
OE#
V
SS
CE#
A0
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
A16
1
2
3
4
5
6
7
8
Standard
TSOP48
1
2
3
4
5
6
7
8
9
Reverse
TSOP48
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
BYTE#
V
SS
DQ15/A-1
DQ7
DQ14
DQ6
DQ13
DQ5
DQ12
DQ4
V
CC
DQ11
DQ3
DQ10
DQ2
DQ9
DQ1
DQ8
DQ0
OE#
V
SS
CE#
A0
A15
A14
A13
A12
A11
A10
A9
A8
NC
NC
WE#
RESET#
NC
NC
RY/BY#
NC
A17
A7
A6
A5
A4
A3
A2
A1
CONVENTIONS
Unless otherwise noted, a positive logic (active
High) convention is assumed throughout this document, whereby the presence at a pin of a higher,
more positive voltage (nominally 5VDC) causes
assertion of the signal. A ‘#’ symbol following the
signal name, e.g., RESET#, indicates that the signal is asserted in a Low state (nominally 0 volts).
Rev. 5.2/May 01
Whenever a signal is separated into numbered
bits, e.g., DQ[7], DQ[6], ..., DQ[0], the family of
bits may also be shown collectively, e.g., as
DQ[7:0].
The designation 0xNNNN (N = 0, 1, 2, . . . , 9, A, .
. . , E, F) indicates a number expressed in hexadecimal notation. The designation 0bXXXX indicates a
number expressed in binary notation (X = 0, 1).
3
Page 4
HY29F400
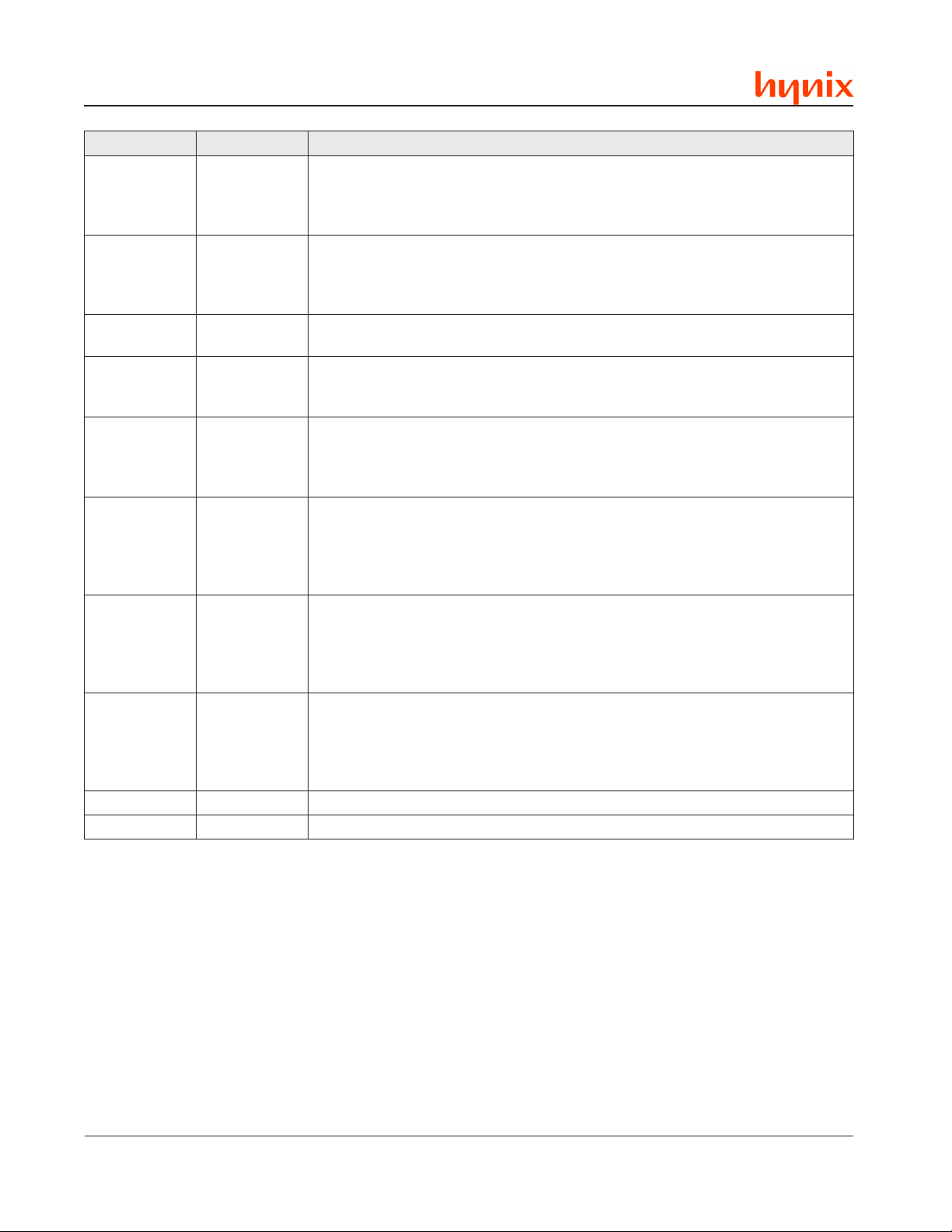
SIGNAL DESCRIPTIONS
emaN epyT noitpircseD
]0:71[AstupnI
,]1-[A/]51[QD
]0:41[QD
#ETYBtupnI
#ECtupnI
#EOtupnI
#EWtupnI
#TESERtupnI
#YB/YR
V
CC
V
SS
--
--
.hgiHevitca,sserddA 441,262foenotcelesstupni81eseht,edomdroWnI
eseht,edometyBnI.snoitarepoetirwrodaerrofyarraehtnihtiwsdrow)K652(
882,425foenotcelesot)BSL(tupni1-A/51QDehthtiwdenibmocerastupni
.snoitarepoetirwrodaerrofyarraehtnihtiwsetyb)K215(
hgiHevitca,suBataD htapatadtib-61aedivorpsnipeseht,edomdroWnI.
stuptuO/stupnI
etats-irT
htapatadtib-8naedivorp]0:7[QD,edometyBnI.snoitarepoetirwdnadaerrof
]8:41[QD.tupnisserddaetybtib-91ehtfoBSLehtsadesusi]1-[A/]51[QDdna
.edometyBnidetats-irtniamerdnadesunuera
.woLevitca,edoMetyB .ecivedehtfonoitarugifnocdroW/etyBehtslortnoC
.edomdroWstceleshgiH,edometyBstceleswoL
.woLevitca,elbanEpihC romorfataddaerotdetressaebtsumtupnisihT
ecivedehtdnadetats-irtsisubatadeht,hgiHnehW.004F92YHehtotatadetirw
.edomybdnatSehtnidecalpsi
woLevitca,elbanEtuptuO snoitarepodaerrofdetressaebtsumtupnisihT.
drowaroetybarehtehwsenimreted#ETYB.snoitarepoetirwrofdetagendna
eraecivedehtmorfstuptuoatad,hgiHnehW.noitarepodaerehtgniruddaersi
.etatsecnadepmihgihehtnidecalperasnipsubatadehtdnadelbasid
.woLevitca,elbanEetirW dnammocrosdnammocfognitirwslortnoC
A.yarrayromemehtfosrotcesesareroatadmargorpotredronisecneuqes
#EOdnawoLsi#ECelihwdetressasi#EWnehwecalpsekatnoitarepoetirw
etirwehtgnirudnettirwsidrowaroetybarehtehwsenimreted#ETYB.hgiHsi
.noitarepo
.woLevitca,teseRerawdraH ehtgnitteserfodohtemerawdrahasedivorP
yletaidemmiti,tesersiecivedehtnehW.etatsyarradaerehtot004F92YH
etirw/daerlladnadetats-irtsisubatadehT.ssergorpninoitarepoynasetanimret
,detressasi#TESERelihW.detressasitupniehtelihwderongierasdnammoc
.edomybdnatSehtnieblliwecivedeht
.sutatSysuB/ydaeR nisidnammocesareroetirwarehtehwsetacidnI
tuptuO
niarDnepO
ehtfoegdegnisirehtretfadilavsi#YB/YR.detelpmocneebsahrossergorp
siecivedehtelihwwoLsniamertI.ecneuqesdnammocafoeslup#EWlanif
daerotydaersitinehwhgiHseogdna,gnisareroatadgnimmargorpylevitca
.atadyarra
.ylppusrewoptlov-5
.dnuorglangisdnarewoP
4
Rev. 5.2/May 01
Page 5

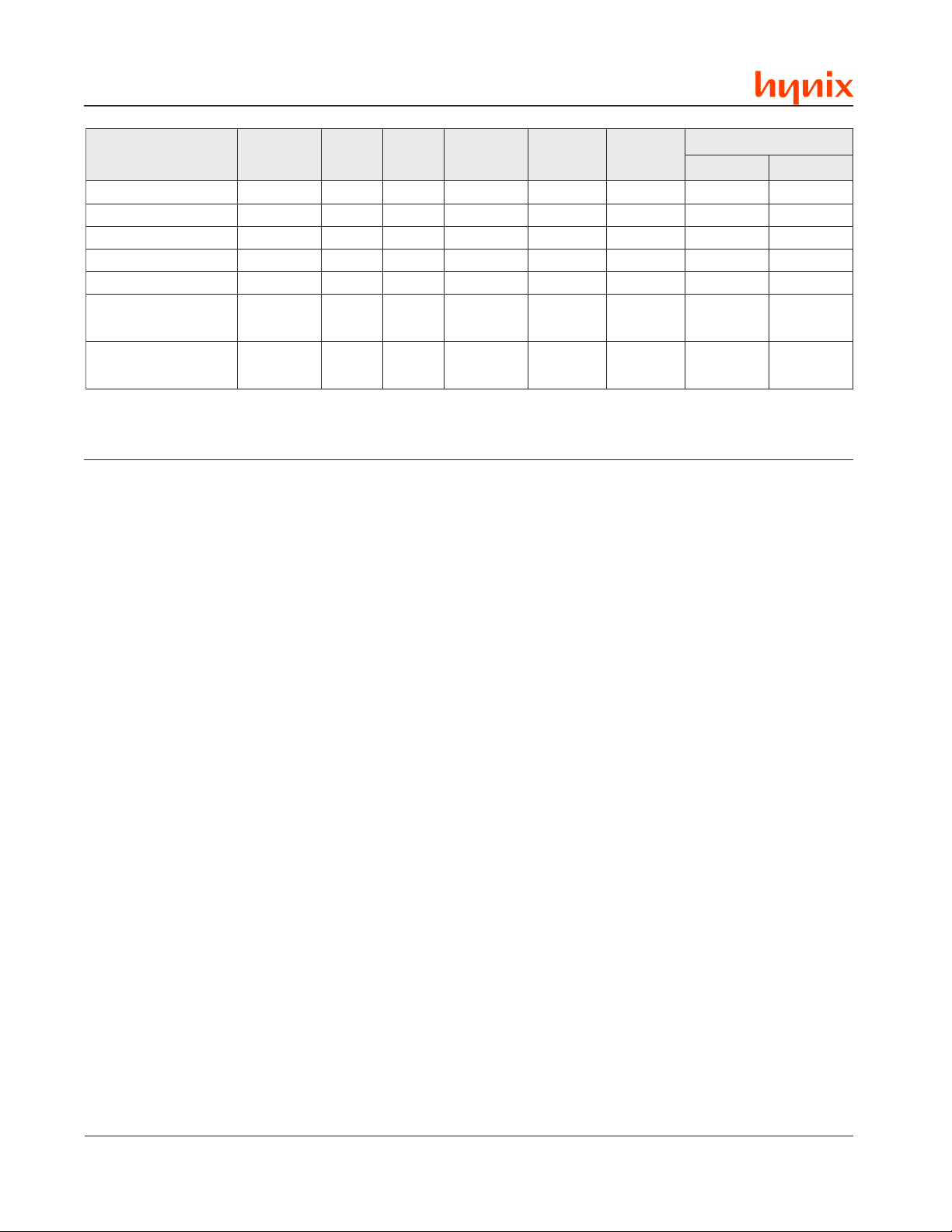
MEMORY ARRAY ORGANIZATION
The 4 Mbit Flash memory array is organized into
11 blocks called sectors (S0, S1, . . . , S10). A
sector is the smallest unit that can be erased and
which can be protected to prevent accidental or
unauthorized erasure. See the ‘Bus Operations’
and ‘Command Definitions’ sections of this document for additional information on these functions.
In the HY29F400, four of the sectors, which comprise the boot block, vary in size from 8 to 32
Kbytes (4 to 16 Kwords), while the remaining
seven sectors are uniformly sized at 64 Kbytes
(32 Kwords). The boot block can be located at
the bottom of the address range (HY29F400B) or
at the top of the address range (HY29F400T).
Table 1. HY29F400 Memory Array Organization
HY29F400
Table 1 defines the sector addresses and corresponding address ranges for the top and bottom
boot block versions of the HY29F400.
BUS OPERATIONS
Device bus operations are initiated through the
internal command register, which consists of sets
of latches that store the commands, along with
the address and data information, if any, needed
to execute the specific command. The command
register itself does not occupy any addressable
memory location. The contents of the command
register serve as inputs to an internal state machine whose outputs control the operation of the
device. Table 2 lists the normal bus operations,
eciveD rotceS
0S23/46 000XXX FFFF0x0-00000x0FFF70x0-00000x0
1S23/46 00 1XXX FFFF1x0-00001x0FFFF0x0-00080x0
2S23/46 010XXX FFFF2x0-00002x0FFF71x0-00001x0
3S23/46 011XXX FFFF3x0-00003x0FFFF1x0-00081x0
4S23/46 100XXX FFFF4x0-00004x0FFF72x0-00002x0
5S23/46 10 1XXX FFFF5x0-00005x0FFFF2x0-00082x0
6S23/46 110XXX FFFF6x0-00006x0FFF73x0-00003x0
7S61/23 1110XX FFF77x0-00007x0FFFB3x0-00083x0
8S4/8 111100 FFF97x0-00087x0FFFC3x0-000C3x0
HY29F400T - Top Boot BlockHY29F400B - Bottom Boot Block
Notes:
1. X indicates Don’t Care.
2. Address in Byte Mode is A[17:-1].
3. Address in Word Mode is A[17:0].
9S4/8 111101 FFFB7x0-000A7x0FFFD3x0-000D3x0
01S8/61 11111X FFFF7x0-000C7x0FFFF3x0-000E3x0
0S8/61 00000X FFF30x0-00000x0FFF10x0-00000x0
1S4/8 000010 FFF50x0-00040x0FFF20x0-00020x0
2S4/8 000011 FFF70x0-00060x0FFF30x0-00030x0
3S61/23 0001XX FFFF0x0-00080x0FFF70x0-00040x0
4S23/46 00 1XXX FFFF1x0-00001x0FFFF0x0-00080x0
5S23/46 010XXX FFFF2x0-00002x0FFF71x0-00001x0
6S23/46 011XXX FFFF3x0-00003x0FFFF1x0-00081x0
7S23/46 100XXX FFFF4x0-00004x0FFF72x0-00002x0
8S23/46 10 1XXX FFFF5x0-00005x0FFFF2x0-00082x0
9S23/46 110XXX FFFF6x0-00006x0FFF73x0-00003x0
01S23/46 111XXX FFFF7x0-00007x0FFFF3x0-00083x0
eziS
)WK/BK(
]71[A ]61[A ]51[A ]41[A ]31[A ]21[A
sserddArotceS
edoMetyB
2
egnaRsserddA
edoMdroW
3
egnaRsserddA
Rev. 5.2/May 01
5
Page 6
HY29F400
Table 2. HY29F400 Normal Bus Operations
noitarepO #EC #EO #EW #TESER sserddA
daeRLLHHA
etirWLHLHA
elbasiDtuptuOLHHHXZ-hgiHZ-hgiHZ-hgiH
ybdnatSLTT#ECHXXHXZ-hgiHZ-hgiHZ-hgiH
ybdnatSSOMC#ECV
teseRerawdraH
)ybdnatSLTT(
V5.0±XXVCCV5.0±X Z-hgiHZ-hgiHZ-hgiH
CC
XXXL X Z-hgiHZ-hgiHZ-hgiH
1
2
NI
NI
]0:7[QD
D
TUO
D
NI
3
]8:51[QD
H=#ETYB L=#ETYB
D
TUO
D
NI
Z-hgiH
Z-hgiH
teseRerawdraH
)ybdnatSSOMC(
Notes:
1. L = V
2. Address is A[17:-1] in Byte Mode and A[17:0] in Word Mode.
3. DQ[15] is the A[-1] input in Byte Mode (BYTE# = L).
, H = VIH, X = Don’t Care, D
IL
XXXV
= Data Out, DIN = Data In. See DC Characteristics for voltage levels.
OUT
SS
the inputs and control levels they require, and the
resulting outputs. Certain bus operations require
a high voltage on one or more device pins. Those
are described in Table 3.
Read Operation
Data is read from the HY29F400 by using standard microprocessor read cycles while placing the
address of the byte or word to be read on the
device’s address inputs, A[17:0] in Word mode
(BYTE# = H) or A[17:-1] in Byte mode (BYTE# =
L) . As shown in Table 2, the host system must
drive the CE# and OE# inputs Low and drive WE#
High for a valid read operation to take place. The
device outputs the specified array data on DQ[7:0]
in Byte mode and on DQ[15:0] in Word mode.
Note that DQ[15] serves as address input A[-1]
when the device is operating in Byte mode.
The HY29F400 is automatically set for reading
array data after device power-up and after a hardware reset to ensure that no spurious alteration of
the memory content occurs during the power transition. No command is necessary in this mode to
obtain array data, and the device remains enabled
for read accesses until the command register contents are altered.
This device features an Erase Suspend mode.
While in this mode, the host may read the array
data from any sector of memory that is not marked
for erasure. If the host attempts to read from an
address within an erase-suspended sector, or
while the device is performing an erase or byte/
V5.0±X Z-hgiHZ-hgiHZ-hgiH
word program operation, the device outputs status data instead of array data. After completing a
programming operation in the Erase Suspend
mode, the system may once again read array data
with the same exceptions noted above. After completing an internal program or internal erase algorithm, the HY29F400 automatically returns to the
Read Array Data mode.
The host must issue a hardware reset or the software reset command (see Command Definitions)
to return a sector to the read array data mode if
DQ[5] goes high during a program or erase cycle,
or to return the device to the Read Array Data
mode while it is in the Electronic ID mode.
Write Operation
Certain operations, including programming data
and erasing sectors of memory, require the host
to write a command or command sequence to the
HY29F400. Writes to the device are performed
by placing the byte or word address on the device’s
address inputs while the data to be written is input
on DQ[7:0] in Byte mode (BYTE# = L) and on
DQ[15:0] in Word mode (BYTE# = H). The host
system must drive the CE# and WE# pins Low
and drive OE# High for a valid write operation to
take place. All addresses are latched on the falling edge of WE# or CE#, whichever happens later.
All data is latched on the rising edge of WE# or
CE#, whichever happens first.
6
Rev. 5.2/May 01
Page 7
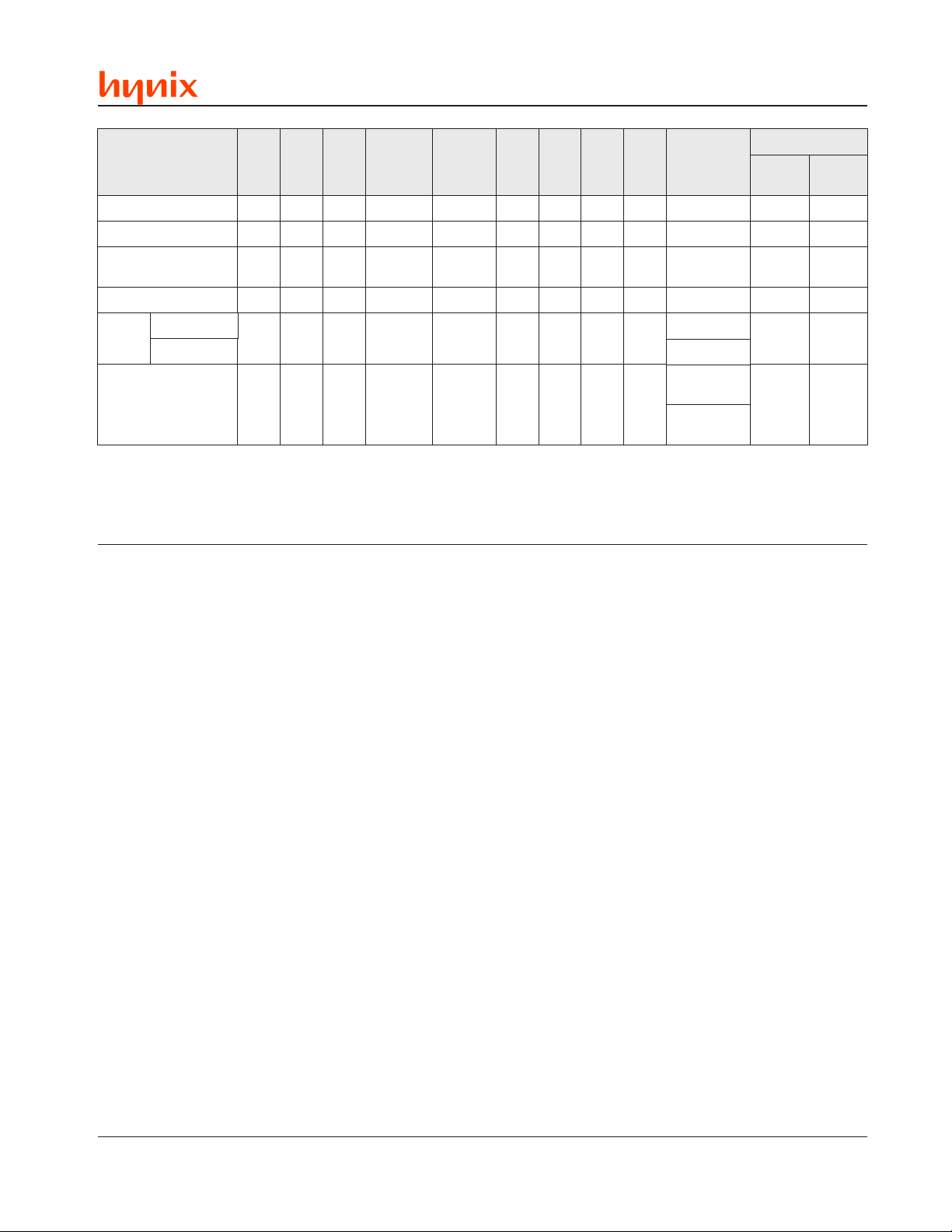
Table 3. HY29F400 Bus Operations Requiring High Voltage
3
noitarepO
tcetorProtceSLV
tcetorpnUrotceSV
rotceSyraropmeT
tcetorpnU
eciveD
edoC
#EC #EO #EW #TESER ]21:71[A ]9[A ]6[A ]1[A ]0[A ]0:7[QD
XH AS
DI
V
DI
XXX V
XH XVDIXXX X X Z-hgiH
DI
DI
edoCrerutcafunaMLLHHXV
4
V
XXX X X Z-hgiH
DI
X XXXX DNID
LLL DAx0XZ-hgiH
DI
B004F92YH
LLH H X V
T004F92YH 32x0
LLH
DI
puorGrotceS
4
noitcetorP
LLH H AS
V
LHL
DI
noitacifireV
Notes:
1. L = V
2. Address bits not specified are Don’t Care.
3. See text for additional information.
4. SA = sector address. See Table 1.
5. DQ[15] is the A[-1] input in Byte Mode (BYTE# = L).
The ‘Device Commands’ section of this document
provides details on the specific device commands
implemented in the HY29F400.
, H = VIH, X = Don’t Care. See DC Characteristics for voltage levels.
IL
the HY29F400 will be in the RESET# TTL Standby
mode, but the standby current will be greater. See
Hardware Reset Operation section for additional
information on the reset operation.
Output Disable Operation
When the OE# input is at V
, output data from the
IH
device is disabled and the data bus pins are placed
in the high impedance state.
The device requires standard access time (t
read access when the device is in either of the
standby modes, before it is ready to read data. If
the device is deselected during erasure or programming, it continues to draw active current until
Standby Operation
the operation is completed.
1, 2
HY29F400
]8:51[QD
#ETYB
H=
NI
BAx0
22x0Z-hgiH
=00x0
detcetorpnU
=10x0
XZ-hgiH
detcetorP
CE
5
L=
Z-hgiH
) for
#ETYB
When the system is not reading from or writing to
the HY29F400, it can place the device in the
Standby mode. In this mode, current consumption is greatly reduced, and the data bus outputs
are placed in the high impedance state, independent of the OE# input. The Standby mode can be
invoked using two methods.
The device enters the CE# CMOS Standby mode
if the CE# and RESET# pins are both held at V
CC
± 0.5V. Note that this is a more restricted voltage
range than V
High, but not within V
. If both CE# and RESET# are held
IH
± 0.5V, the device will be
CC
in the CE# TTL Standby mode, but the standby
current will be greater.
The device enters the RESET# CMOS Standby
mode when the RESET# pin is held at V
If RESET# is held Low but not within V
Rev. 5.2/May 01
± 0.5V.
SS
± 0.5V,
SS
Hardware Reset Operation
The RESET# pin provides a hardware method of
resetting the device to reading array data. When
the RESET# pin is driven Low for the minimum
specified period, the device immediately terminates any operation in progress, tri-states the data
bus pins, and ignores all read/write commands for
the duration of the RESET# pulse. The device also
resets the internal state machine to reading array
data. If an operation was interrupted by the assertion of RESET#, it should be reinitiated once
the device is ready to accept another command
sequence to ensure data integrity.
Current is reduced for the duration of the RESET#
pulse as described in the Standby Operation section above.
7
Page 8
HY29F400
If RESET# is asserted during a program or erase
operation, the RY/BY# pin remains Low (busy) until
the internal reset operation is complete, which requires a time of t
(during Automatic Algo-
READY
rithms). The system can thus monitor RY/BY# to
determine when the reset operation completes,
and can perform a read or write operation t
RB
after
RY/BY# goes High. If RESET# is asserted when
a program or erase operation is not executing (RY/
BY# pin is High), the reset operation is completed
within a time of t
form a read or write operation t
. In this case, the host can per-
RP
after the RE-
RH
SET# pin returns High .
The RESET# pin may be tied to the system reset
signal. Thus, a system reset would also reset the
device, enabling the system to read the boot-up
firmware from the Flash memory.
Sector Protect/Unprotect Operations
Hardware sector protection can be invoked to disable program and erase operations in any single
sector or combination of sectors. This function is
typically used to protect data in the device from
unauthorized or accidental attempts to program
or erase the device while it is in the system (e.g.,
by a virus) and is implemented using programming equipment. Sector unprotection re-enables
the program and erase operations in previously
protected sectors.
Table 1 identifies the eleven sectors and the address range that each covers for both versions of
the device. The device is shipped with all sectors
unprotected.
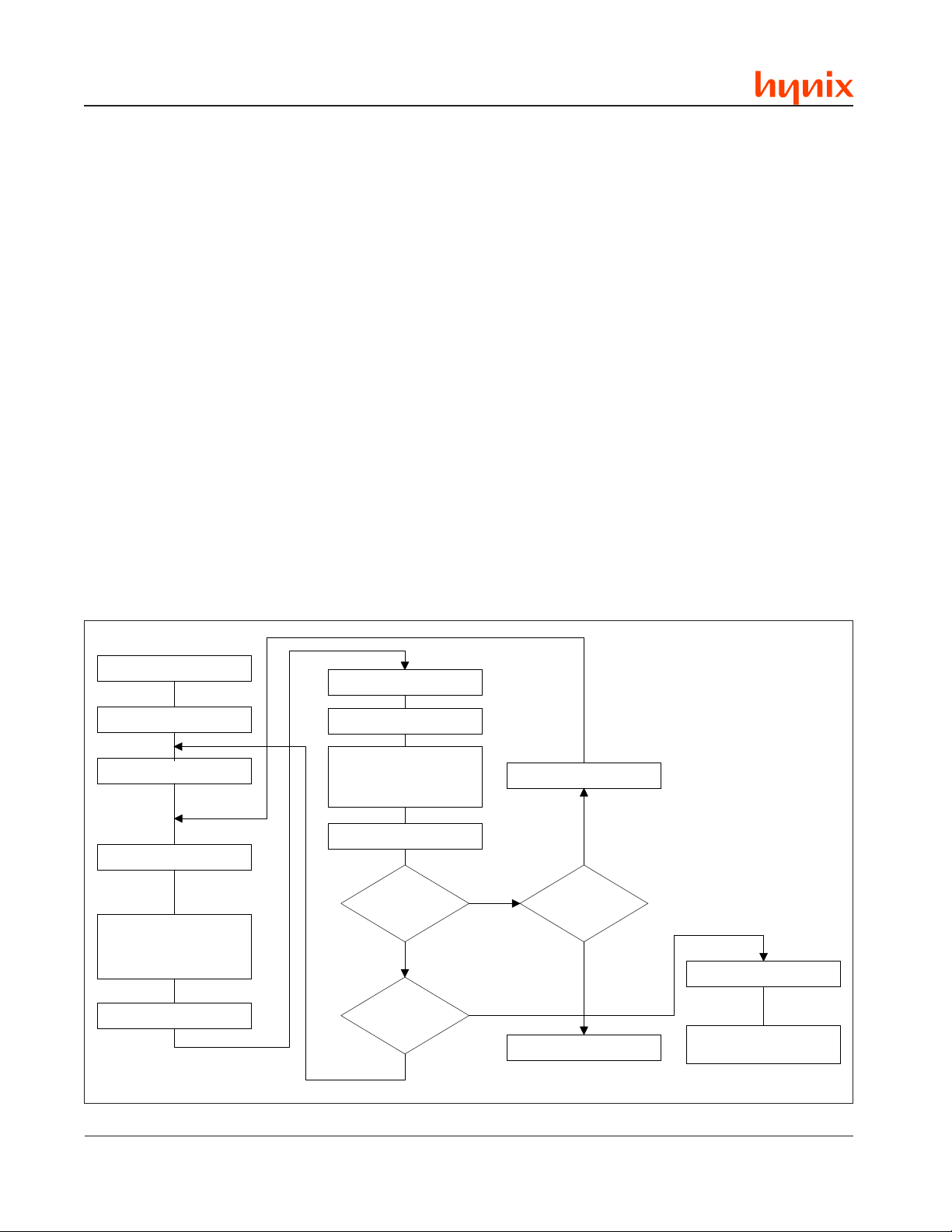
The sector protect/unprotect operations require a
high voltage (V
) on address pin A[9] and the CE#
ID
and/or OE# control pins, as detailed in Table 3.
When implementing these operations, note that
must be applied to the device before applying
V
CC
, and that VID should be removed before remov-
V
ID
ing V
from the device.
CC
The flow chart in Figure 1 illustrates the procedure for protecting sectors, and timing specifications and waveforms are shown in the specifications section of this document. Verification of protection is accomplished as described in the Electronic ID Mode section and shown in the flow chart.
START
APPLY V
Set TRYCNT = 1
Set A[9] = OE# = V
Set Address:
A[17:12] = Sector to Protect
RESET# = V
CC
CE# = V
IL
WE# = V
ID
IH
IL
Wait t
WPP1
WE# = V
IH
A[9] = V
A[17:12] = Sector to Protect
OE# = CE# = V
A[6] = A[0] = VIL, A[1] = V
Data = 0x01?
Protect Another
ID
Read Data
YES
Sector?
YES
IL
IH
NO
NO
Increment TRYCNT
NO
TRYCNT = 25?
YES
DEVICE FAILURE
Figure 1. Sector Protect Procedure
Remove VID from A[9]
SECTOR PROTECT
COMPLETE
8
Rev. 5.2/May 01
Page 9

The procedure for sector unprotection is illustrated
in the flow chart in Figure 2, and timing specifications and waveforms are given at the end of this
document. Note that to unprotect any sector, all
unprotected sectors must first be protected prior
to the first unprotect write cycle.
Sectors can also be temporarily unprotected as
described in the next section.
Temporary Sector Unprotect Operation
START
RESET# = V
(All protected sector groups
become unprotected)
Perform Program or Erase
Operations
ID
HY29F400
This feature allows temporary unprotection of previously protected sectors to allow changing the
data in-system. Temporary Sector Unprotect
mode is activated by setting the RESET# pin to
V
. While in this mode, formerly protected sec-
ID
tors can be programmed or erased by invoking
the appropriate commands (see Device Commands section). Once V
is removed from RE-
ID
SET#, all the previously protected sectors are protected again. Figure 3 illustrates the algorithm.
START
NOTE: All sectors must be
previously protected.
APPLY V
Set: TRYCNT = 1
Set: NSEC = 0
Set: A[9] = CE# = OE# = V
CC
ID
Set Sector Address:
A[17:12] = Sector NSEC
A[0] = A[6] = V
A[1] = V
Read Data
Data = 0x00?
IL
IH
NO
RESET# = V
(All previously protected
sector groups return to
protected state)
TEMPORARY SECTOR
UNPROTECT COMPLETE
IH
Figure 3. T emporary Sector Unprotect
Increment TRYCNT
NO
TRYCNT = 1000?
YES
Set: RESET# = V
WE# = V
Wait t
WE# = V
A[9] = V
OE# = CE# = V
Rev. 5.2/May 01
Set:
WPP2
IH
IL
NSEC = NSEC + 1
IH
ID
IL
YES
NSEC = 10?
NO
YES
Remove VID from A[9]
SECTOR UNPROTECT
COMPLETE
DEVICE FAILURE
Figure 2. Sector Unprotect Procedure
9
Page 10
HY29F400
Electronic ID Mode Operation
The Electronic ID mode provides manufacturer and
device identification and sector protection verification through identifier codes output on DQ[7:0]
or DQ[15:0]. This mode is intended primarily for
programming equipment to automatically match
a device to be programmed with its corresponding programming algorithm. The Electronic ID information can also be obtained by the host through
a command sequence, as described in the Device Commands section.
Operation in the Electronic ID mode requires V
on address pin A[9], with additional requirements
for obtaining specific data items as listed in Table
2:
n A read cycle at address 0xXXX00 retrieves the
manufacturer code (Hynix = 0xAD).
DEVICE COMMANDS
Device operations are initiated by writing designated address and data command sequences into
the device. A command sequence is composed
of one, two or three of the following sub-segments:
an unlock cycle, a command cycle and a data
cycle. Table 4 summarizes the composition of the
valid command sequences implemented in the
HY29F400, and these sequences are fully described in Table 5 and in the sections that follow.
Writing incorrect address and data values or writing them in the improper sequence resets the
HY29F400 to the Read mode.
Read/Reset 1, 2 Commands
The HY29F400 automatically enters the Read
mode after device power-up, after the RESET#
input is asserted and upon the completion of certain commands. Read/Reset commands are not
required to retrieve data in these cases.
A Read/Reset command must be issued in order
to read array data in the following cases:
n If the device is in the Electronic ID mode, a
Read/Reset command must be written to return to the Read mode. If the device was in the
Erase Suspend mode when the device entered
the Electronic ID mode, writing the Read/Reset command returns the device to the Erase
Suspend mode.
n A read cycle at address 0xXXX01 returns the
device code:
- HY29F400T = 0x23 in Byte mode, 0x2223 in
Word mode.
- HY29F400B = 0xAB in Byte mode, 0x22AB
in Word mode.
n A read cycle containing a sector address (Table
1) in A[17:12] and the address 0x02 in A[7:0]
returns 0x01 if that sector is protected, or 0x00
if it is unprotected.
ID
Table 4. Composition of Command Sequences
dnammoC
ecneuqeS
1teseR/daeR011etoN
2teseR/daeR211etoN
margorPetyB211
esarEpihC411
esarErotceS41)2etoN(1
dnepsuSesarE010
emuseResarE010
DIcinortcelE213etoN
Notes:
1. Any number of Flash array read cycles are permitted.
2. Additional data cycles may follow. See text.
3. Any number of Electronic ID read cycles are permitted.
Note: When in the Electronic ID bus operation mode,
the device returns to the Read mode when V
moved from the A[9] pin. The Read/Reset command is
not required in this case.
kcolnU dnammoC ataD
n If DQ[5] (Exceeded Time Limit) goes High dur-
ing a program or erase operation, writing the
Read/Reset command returns the sectors to
the Read mode (or to the Erase Suspend mode
if the device was in Erase Suspend).
The Read/Reset command may also be used to
abort certain command sequences:
selcyCsuBforebmuN
is re-
ID
10
Rev. 5.2/May 01
Page 11
HY29F400
01
555
55
55AS03
AA2
AA2
SUTATS
AA
AA
3,2,1
555
555
20X)AS(
10X)tooBmottoB(BA22,)tooBpoT(3222
40X)AS(
selcyCsuB
0FARDR
0AAPDP
08
08
555
555
555
555
55
55
55
55
AA2
AA2
AA2
AA2
AA
AA
AA
AA
0900XDA
09
09
555
555
555
55
55
55
AA2
AA2
AA2
AA
AA
AA
tsriF dnoceS drihT htruoF htfiF htxiS
ddA ataD ddA ataD ddA ataD ddA ataD ddA ataD ddA ataD
555
etirW
555
555
555
selcyC
1XXX0FARDR
3
6
4
6
555
555
555
1XXX0B
1XXX03
3
3
3
droW
droW
droW
etyBAAA555AAA
etyBAAA555AAA
droW
etyBAAA555AAAAAA555AAA
etyBAAA555AAAAAA555
ecneuqeSdnammoC
8,7
8,6
2teseR/teseR
1teseR/daeR
4
5
dnepsuSesarE
esarErotceS
emuseResarE
esarEpihC
margorP
Table 5. HY29F400 Command Sequences
Rev. 5.2/May 01
droW
droW
droW
etyBAAA555AAA
etyBAAA555AAA
etyBAAA555AAA20X)tooBmottoB(BA,)tooBpoT(32
yfireVtcetorProtceS
edoCrerutcafunaM
edoCeciveD
7
Electronic ID
Legend:
X = Don’t Care PA = Address of the data to be programmed
RA = Memory address of data to be read PD = Data to be programmed at address PA
RD = Data read from location RA during the read operation SA = Sector address of sector to be erased or verified (see Note 3 and Table 1).
STATUS = Sector protect status: 0x00 = unprotected, 0x01 = protected.
Notes:
1. All values are in hexadecimal. DQ[15:8] are don’t care for unlock and command cycles.
• For RA and PA, A[17:11] are the upper address bits of the byte to be read or programmed.
• For the sixth cycle of Sector Erase, SA = A[17:12] are the sector address of the sector to be erased.
2. All bus cycles are write operations unless otherwise noted.
3. Address is A[10:0] in Word mode and A[10:-1] in Byte mode. A[17:11] are don’t care except as follows:
Electronic ID mode, while in the Erase Suspend mode.
• For the fourth cycle of Sector Protect Verify, SA = A[17:12] are the sector address of the sector to be verified.
4. The Erase Suspend command is valid only during a sector erase operation. The system may read and program in non-erasing sectors, or enter the
5. The Erase Resume command is valid only during the Erase Suspend mode.
6. The second bus cycle is a read cycle.
DQ[5] goes High during a program or erase operation. It is not required for normal read operations.
7. The fourth bus cycle is a read cycle.
8. Either command sequence is valid. The command is required only to return to the Read mode when the device is in the Electronic ID command mode or if
11
Page 12
HY29F400
n In a Sector Erase or Chip Erase command se-
quence, the Read/Reset command may be
written at any time before erasing actually begins, including, for the Sector Erase command,
between the cycles that specify the sectors to
be erased (see Sector Erase command description). This aborts the command and resets the device to the Read mode. Once erasure begins, however, the device ignores Read/
Reset commands until the operation is complete.
n In a Program command sequence, the Read/
Reset command may be written between the
sequence cycles before programming actually
begins. This aborts the command and resets
the device to the Read mode, or to the Erase
Suspend mode if the Program command sequence is written while the device is in the
Erase Suspend mode. Once programming
begins, however, the device ignores Read/
Reset commands until the operation is complete.
n The Read/Reset command may be written be-
tween the cycles in an Electronic ID command
sequence to abort that command. As described
above, once in the Electronic ID mode, the
Read/Reset command must be written to return to the Read mode.
Byte/Word Program Command
sure data integrity, the aborted program command
sequence should be reinitiated once the reset
operation is complete.
Programming is allowed in any sequence. Only
erase operations can convert a stored “0” to a “1”.
Thus, a bit cannot be programmed from a “0” back
to a “1”. Attempting to do so will set DQ[5] to “1”,
and the Data# Polling algorithm will indicate that
the operation was not successful. A Read/Reset
command or a hardware reset is required to exit
this state, and a succeeding read will show that
the data is still “0”.
Figure 4 illustrates the procedure for the Byte/Word
Program operation.
Chip Erase Command
The Chip Erase command sequence consists of
two unlock cycles, followed by the erase command, two additional unlock cycles and then the
chip erase data cycle. During chip erase, all sectors of the device are erased except protected
sectors. The command sequence starts the Automatic Erase algorithm, which preprograms
and verifies the entire memory, except for protected sectors, for an all zero data pattern prior to
electrical erase. The device then provides the
required number of internally generated erase
pulses and verifies cell erasure within the proper
cell margins. The host system is not required to
The host processor programs the device a byte or
word at a time by issuing the Program command
sequence shown in Table 5. The sequence begins by writing two unlock cycles, followed by the
Program setup command and, lastly, a data cycle
specifying the program address and data. This
initiates the Automatic Programming algorithm,
which provides internally generated program
pulses and verifies the programmed cell margin.
The host is not required to provide further controls or timings during this operation. When the
Automatic Programming algorithm is complete, the
device returns to the Read mode. Several methods are provided to allow the host to determine
the status of the programming operation, as described in the Write Operation Status section.
Commands written to the device during execution
of the Automatic Programming algorithm are ignored. Note that a hardware reset immediately
terminates the programming operation. To en-
12
START
Issue PROGRAM
Command Sequence:
Last cycle contains
program Address/Data
Check Programming Status
(See Write Operation Status
Section)
Normal Exit
NO
Last Word/Byte
Done?
YES
PROGRAMMING
COMPLETE
DQ[5] Error Exit
GO TO
ERROR RECOVERY
Figure 4. Programming Procedure
Rev. 5.2/May 01
Page 13

HY29F400
provide any controls or timings during these operations.
Commands written to the device during execution
of the Automatic Erase algorithm are ignored. Note
that a hardware reset immediately terminates the
erase operation. To ensure data integrity, the
aborted Chip Erase command sequence should
be reissued once the reset operation is complete.
When the Automatic Erase algorithm is finished,
the device returns to the Read mode. Several
methods are provided to allow the host to determine the status of the erase operation, as described in the Write Operation Status section.
Figure 5 illustrates the Chip Erase procedure.
Sector Erase Command
The Sector Erase command sequence consists
of two unlock cycles, followed by the erase command, two additional unlock cycles and then the
sector erase data cycle, which specifies which
sector is to be erased. As described later in this
section, multiple sectors can be specified for erasure with a single command sequence. During
sector erase, all specified sectors are erased sequentially. The data in sectors not specified for
erasure, as well as the data in any protected sectors, even if specified for erasure, is not affected by the sector erase operation.
The Sector Erase command sequence starts the
Automatic Erase algorithm, which preprograms
and verifies the specified unprotected sectors for
an all zero data pattern prior to electrical erase.
The device then provides the required number of
START
Issue CHIP ERASE
Command Sequence
Check Erase Status
(See Write Operation Status
Section)
Normal Exit
CHIP ERASE COMPLETE
DQ[5] Error Exit
GO TO
ERROR RECOVERY
Figure 5. Chip Erase Procedure
internally generated erase pulses and verifies cell
erasure within the proper cell margins. The host
system is not required to provide any controls or
timings during these operations.
After the sector erase data cycle (the sixth bus
cycle) of the command sequence is issued, a sector erase time-out of 50 µs, measured from the
rising edge of the final WE# pulse in that bus cycle,
begins. During this time, an additional sector erase
data cycle, specifying the sector address of another sector to be erased, may be written into an
internal sector erase buffer. This buffer may be
loaded in any sequence, and the number of sectors specified may be from one sector to all sectors. The only restriction is that the time between
these additional data cycles must be less than 50
µs, otherwise erasure may begin before the last
data cycle is accepted. To ensure that all data
cycles are accepted, it is recommended that host
processor interrupts be disabled during the time
that the additional cycles are being issued and then
be re-enabled afterwards.
Note: The device is capable of accepting three ways
of invoking Erase Commands for additional sectors
during the time-out window. The preferred method,
described above, is the sector erase data cycle after
the initial six bus cycle command sequence. However,
the device also accepts the following methods of
specifying additional sectors during the sector erase
time-out:
n Repeat the entire six-cycle command sequence,
specifying the additional sector in the sixth cycle.
n Repeat the last three cycles of the six-cycle command
sequence, specifying the additional sector in the third
cycle.
If all sectors scheduled for erasing are protected,
the device returns to reading array data after approximately 100 µs. If at least one scheduled sector is not protected, the erase operation erases
the unprotected sectors, and ignores the command
for the scheduled sectors that are protected.
The system can monitor DQ[3] to determine if the
50 µs sector erase time-out has expired, as described in the Write Operation Status section. If
the time between additional sector erase data
cycles can be insured to be less than the timeout, the system need not monitor DQ[3].
Any command other than Sector Erase or Erase
Suspend during the time-out period resets the
device to reading array data. The system must
then rewrite the command sequence, including any
Rev. 5.2/May 01
13
Page 14

HY29F400
additional sector erase data cycles. Once the sector erase operation itself has begun, only the Erase
Suspend command is valid. All other commands
are ignored.
As for the Chip Erase command, note that a hardware reset immediately terminates the erase operation. To ensure data integrity, the aborted Sector Erase command sequence should be reissued
once the reset operation is complete.
When the Automatic Erase algorithm terminates,
the device returns to the Read mode. Several
methods are provided to allow the host to determine the status of the erase operation, as described in the Write Operation Status section.
Figure 6 illustrates the Sector Erase procedure.
Erase Suspend/Erase Resume Commands
The Erase Suspend command allows the system
to interrupt a sector erase operation to read data
from, or program data to, any sector not being
erased. The command causes the erase operation to be suspended in all sectors selected for
erasure. This command is valid only during the
sector erase operation, including during the 50 µs
time-out period at the end of the initial command
sequence and any subsequent sector erase data
cycles, and is ignored if it is issued during chip
erase or programming operations.
The HY29F400 requires a maximum of 20 µs to
suspend the erase operation if the Erase Suspend
command is issued during active sector erasure.
However, if the command is written during the timeout, the time-out is terminated and the erase operation is suspended immediately. Any subsequent attempts to specify additional sectors for
erasure by writing the sector erase data cycle (SA/
0x30) will be interpreted as the Erase Resume
command (XXX/0x30), which will cause the Automatic Erase algorithm to begin its operation. Note
that any other command during the time-out will
reset the device to the Read mode.
Once the erase operation has been suspended,
the system can read array data from or program
data to any sector not selected for erasure. Normal read and write timings and command definitions apply. Reading at any address within erasesuspended sectors produces status data on
DQ[7:0]. The host can use DQ[7], or DQ[6] and
DQ[2] together, to determine if a sector is actively
erasing or is erase-suspended. See “Write Operation Status” for information on these status bits.
START
Write First Five Cycles of
SECTOR ERASE
Command Sequence
Setup First (or Next) Sector
Address for Erase Operation
Write Last Cycle (SA/0x30)
of SECTOR ERASE
Command Sequence
Erase An
Additional Sector?
NO
14
YES
NO
Sector Erase
Time-out (DQ[3])
Expired?
YES
Figure 6. Sector Erase Procedure
Check Erase Status
(See Write Operation Status
Section)
Normal Exit
ERASE COMPLETE
Sectors which require erasure
but which were not specified in
this erase cycle must be erased
later using a new command
sequence
DQ[5] Error Exit
GO TO
ERROR RECOVERY
Rev. 5.2/May 01
Page 15

HY29F400
After an erase-suspended program operation is
complete, the host can initiate another programming operation (or read operation) within non-suspended sectors. The host can determine the status of a program operation during the erase-suspended state just as in the standard programming
operation.
The system must write the Erase Resume command to exit the Erase Suspend mode and continue the sector erase operation. Further writes of
the Resume command are ignored. Another Erase
Suspend command can be written after the device has resumed erasing.
The host may also write the Electronic ID command sequence when the device is in the Erase
Suspend mode. The device allows reading Electronic ID codes even if the addresses used for the
ID read cycles are within erasing sectors, since
the codes are not stored in the memory array.
When the device exits the Electronic ID mode, the
device reverts to the Erase Suspend mode, and
is ready for another valid operation. See Electronic
ID section for more information.
Electronic ID Command
The Electronic ID operation intended for use in
programming equipment has been described previously. The host processor can also be obtain
the same data by using the Electronic ID command sequence shown in Table 5. This method
does not require V
on any pin. The Electronic ID
ID
command sequence may be invoked while the
device is in the Read mode or the Erase Suspend
WRITE OPERATION STATUS
mode, but is invalid while the device is actively
programming or erasing.
The Electronic ID command sequence is initiated
by writing two unlock cycles, followed by the Electronic ID command. The device then enters the
Electronic ID mode, and:
n A read cycle at address 0xXXX00 retrieves the
manufacturer code (Hynix = 0xAD).
n In Word mode, a read cycle at address
0xXXX01 returns the device code (HY29F400T
= 0x2223, HY29F400B = 0x22AB). In Byte
mode, the same information is retrieved from
address 0xXXX02 (HY29F400T = 0x23,
HY29F400B = 0xAB).
n In Word mode, a read cycle containing a sec-
tor address in A[17:12] and the address 0x02
in A[7:0] returns 0xXX01 if that sector is protected, or 0xXX00 if it is unprotected. In Byte
mode, the status information is retrieved using
0x04 in A[6:-1] (0x01 if the sector is protected,
0x00 if the sector is unprotected).
The host system may read at any address any
number of times, without initiating another command sequence. Thus, for example, the host may
determine the protection status for all sectors by
doing successive reads at the address specified
above while changing the sector address for each
cycle.
The system must write the Reset command to exit
the Electronic ID mode and return to the Read
mode, or to the Erase Suspend mode if the device was in that mode when the command sequence was issued.
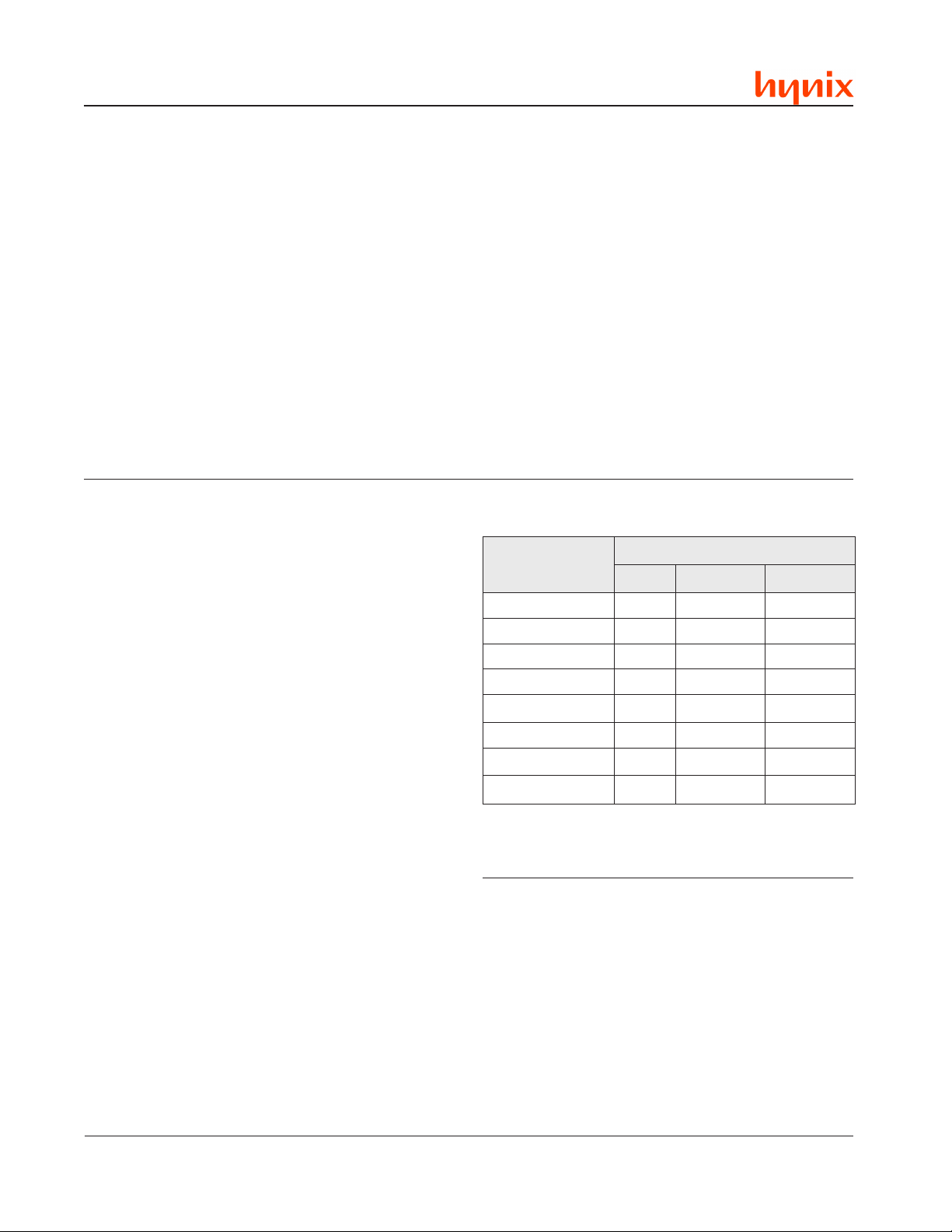
The HY29F400 provides a number of facilities to
determine the status of a program or erase operation. These are the RY/BY# (Ready/Busy#)
pin and certain bits of a status word which can be
read from the device during the programming and
erase operations. Table 6 summarizes the status
indications and further detail is provided in the
subsections which follow.
RY/BY# - Ready/Busy#
RY/BY# is an open-drain output pin that indicates
whether a programming or erase Automatic Algorithm is in progress or has completed. A pull-up
resistor to V
Rev. 5.2/May 01
is required for proper operation. RY/
CC
BY# is valid after the rising edge of the final WE#
pulse in the corresponding command sequence.
If the output is Low (busy), the device is actively
erasing or programming, including programming
while in the Erase Suspend mode. If the output is
High (ready), the device has completed the operation and is ready to read array data in the normal or Erase Suspend modes, or it is in the standby
mode.
DQ[7] - Data# Polling
The Data# (“Data Bar”) Polling bit, DQ[7], indicates
to the host system whether an Automatic Algo-
15
Page 16

HY29F400
Table 6. Write and Erase Operation Status Summary
edoM noitarepO ]7[QD
ssergorpnignimmargorP#]7[QDelggoT1/0
lamroN
detelpmocesarE1ataD
rotces
esarE
dnepsuS
Notes:
1. A valid address is required when reading status information. See text for additional information.
2. DQ[5] status switches to a ‘1’ when a program or erase operation exceeds the maximum timing limit.
3. A ‘1’ during sector erase indicates that the 50 µs time-out has expired and active erasure is in progress. DQ[3] is not
applicable to the chip erase operation.
4. Equivalent to ‘No Toggle’ because data is obtained in this state.
5. Programming can be done only in a non-suspended sector (a sector not marked for erasure).
detelpmocgnimmargorPataDataD
ssergorpniesarE0elggoT1/0
dednepsusesarenihtiwdaeR
esare-nonnihtiwdaeR
rotcesdednepsus
5
ssergorpnignimmargorP
5
detelpmocgnimmargorP
1
1elggotoN0A/NelggoT1
ataDataDataDataDataD1
#]7[QDelggoT1/0
ataDataD
]6[QD ]5[QD ]3[QD ]2[QD
2
4
4
4
ataDataDataD1
2
ataDataDataD
2
ataDataDataD1
A/NA/N0
3
1
A/NA/N0
1
elggoT0
4
#YB/YR
1
rithm is in progress or completed, or whether the
device is in Erase Suspend mode. Data# Polling
is valid after the rising edge of the final WE# pulse
in the Program or Erase command sequence.
The system must do a read at the program address to obtain valid programming status information on this bit. While a programming operation is
in progress, the device outputs the complement
of the value programmed to DQ[7]. When the programming operation is complete, the device outputs the value programmed to DQ[7]. If a program operation is attempted within a protected
sector, Data# Polling on DQ[7] is active for approximately 2 µs, then the device returns to reading array data.
The host must read at an address within any nonprotected sector scheduled for erasure to obtain
valid erase status information on DQ[7]. During
an erase operation, Data# Polling produces a “0”
on DQ[7]. When the erase operation is complete,
or if the device enters the Erase Suspend mode,
Data# Polling produces a “1” on DQ[7]. If all sectors selected for erasing are protected, Data#
Polling on DQ[7] is active for approximately 100
µs, then the device returns to reading array data.
If at least one selected sector is not protected, the
erase operation erases the unprotected sectors,
and ignores the command for the selected sectors that are protected.
When the system detects that DQ[7] has changed
from the complement to true data (or “0” to “1” for
erase), it should do an additional read cycle to read
valid data from DQ[7:0]. This is because DQ[7]
may change asynchronously with respect to the
other data bits while Output Enable (OE#) is asserted low.
Figure 7 illustrates the Data# Polling test algorithm.
DQ[6] - Toggle Bit I
Toggle Bit I on DQ[6] indicates whether an Automatic Program or Erase algorithm is in progress
or complete, or whether the device has entered
the Erase Suspend mode. Toggle Bit I may be
read at any address, and is valid after the rising
edge of the final WE# pulse in the program or erase
command sequence, including during the sector
erase time-out. The system may use either OE#
or CE# to control the read cycles.
Successive read cycles at any address during an
Automatic Program algorithm operation (including
programming while in Erase Suspend mode)
cause DQ[6] to toggle. DQ[6] stops toggling when
the operation is complete. If a program address
falls within a protected sector, DQ[6] toggles for
approximately 2 µs after the program command
sequence is written, then returns to reading array
data.
16
Rev. 5.2/May 01
Page 17

While the Automatic Erase algorithm is operating,
successive read cycles at any address cause
DQ[6] to toggle. DQ[6] stops toggling when the
erase operation is complete or when the device is
placed in the Erase Suspend mode. The host may
use DQ[2] to determine which sectors are erasing
or erase-suspended (see below). After an Erase
command sequence is written, if all sectors selected for erasing are protected, DQ[6] toggles for
approximately 100 µs, then returns to reading array data. If at least one selected sector is not
protected, the Automatic Erase algorithm erases
the unprotected sectors, and ignores the selected
sectors that are protected.
START
Read DQ[7:0]
at Valid Address (Note 1)
DQ[7] = Data?
NO
NO
DQ[5] = 1?
HY29F400
Test for DQ[7] = 1?
for Erase Operation
YES
Note: In the current version of the device, unreliable
testing of DQ[6] for erase completion may occur if the
test is done before the Sector Erase Timer (DQ[3]) has
expired. It is recommended that for erase operations
the DQ[6] test be delayed for a minimum of 100 µs or
until after DQ[3] switches from a ‘0’ to a ‘1’. This anomaly
will be corrected in a future revision of the device.
DQ[2] - Toggle Bit II
Toggle Bit II, DQ[2], when used with DQ[6], indicates whether a particular sector is actively erasing or whether that sector is erase-suspended.
Toggle Bit II is valid after the rising edge of the
final WE# pulse in the command sequence. The
device toggles DQ[2] with each OE# or CE# read
cycle.
DQ[2] toggles when the host reads at addresses
within sectors that have been selected for erasure,
but cannot distinguish whether the sector is actively erasing or is erase-suspended. DQ[6], by
comparison, indicates whether the device is actively erasing or is in Erase Suspend, but cannot
distinguish which sectors are selected for erasure.
Thus, both status bits are required for sector and
mode information.
Figure 8 illustrates the operation of Toggle Bits I
and II.
YES
Read DQ[7:0]
at Valid Address (Note 1)
Test for DQ[7] = 1?
for Erase Operation
DQ[7] = Data?
(Note 2)
NO
PROGRAM/ERASE
EXCEEDED TIME ERROR
Notes:
1. During programming, the program address.
During sector erase, an address within any non-protected sector
scheduled for erasure.
During chip erase, an address within any non-protected sector.
2. Recheck DQ[7] since it may change asynchronously at the same time
as DQ[5].
YES
PROGRAM/ERASE
COMPLETE
Figure 7. Data# Polling Test Algorithm
The DQ[5] failure condition will also be signaled if
the host tries to program a ‘1’ to a location that is
previously programmed to ‘0’, since only an erase
operation can change a ‘0’ to a ‘1’.
For both of these conditions, the host must issue
a Read/Reset command to return the device to
the Read mode.
DQ[5] - Exceeded Timing Limits
DQ[5] is set to a ‘1’ when the program or erase
time has exceeded a specified internal pulse count
limit. This is a failure condition that indicates that
the program or erase cycle was not successfully
completed. DQ[5] status is valid only while DQ[7]
or DQ[6] indicate that the Automatic Algorithm is
in progress.
Rev. 5.2/May 01
DQ[3] - Sector Erase Timer
After writing a Sector Erase command sequence,
the host may read DQ[3] to determine whether or
not an erase operation has begun. When the
sector erase time-out expires and the sector erase
operation commences, DQ[3] switches from a ‘0’
to a ‘1’. Refer to the “Sector Erase Command”
section for additional information. Note that the
17
Page 18

HY29F400
START
Read DQ[7:0]
at Valid Address (Note 1)
Read DQ[7:0]
at Valid Address (Note 1)
DQ[6] Toggled?
NO
(Note 4)
NO
(Note 3)
PROGRAM/ERASE
COMPLETE
:
Notes
1. During programming, the program address.
During sector erase, an address within any sector scheduled for erasure.
2. Recheck DQ[6] since toggling may stop at the same time as DQ[5] changes from 0 to 1.
3. Use this path if testing for Program/Erase status.
4. Use this path to test whether sector is in Erase Suspend mode.
YES
NO
NO
DQ[5] = 1?
YES
Read DQ[7:0]
at Valid Address (Note 1)
DQ[6] Toggled?
(Note 2)
YES
PROGRAM/ERASE
EXCEEDED TIME ERROR
Read DQ[7:0]
Read DQ[7:0]
DQ[2] Toggled?
SECTOR BEING READ
IS IN ERASE SUSPEND
Figure 8. Toggle Bit I and II Test Algorithm
sector erase timer does not apply to the Chip Erase
command.
After the initial Sector Erase command sequence
is issued, the system should read the status on
DQ[7] (Data# Polling) or DQ[6] (Toggle Bit I) to
ensure that the device has accepted the command
sequence, and then read DQ[3]. If DQ[3] is a ‘1’,
the internally controlled erase cycle has begun and
all further sector erase data cycles or commands
(other than Erase Suspend) are ignored until the
erase operation is complete. If DQ[3] is a ‘0’, the
device will accept a sector erase data cycle to mark
an additional sector for erasure. To ensure that
the data cycles have been accepted, the system
software should check the status of DQ[3] prior to
and following each subsequent sector erase data
cycle. If DQ[3] is high on the second status check,
the last data cycle might not have been accepted.
NO
YES
SECTOR BEING READ
IS NOT IN ERASE SUSPEND
HARDWARE DATA PROTECTION
The HY29F400 provides several methods of protection to prevent accidental erasure or programming which might otherwise be caused by spurious system level signals during V
power-up and
CC
power-down transitions, or from system noise.
These methods are described in the sections that
follow.
Command Sequences
Commands that may alter array data require a
sequence of cycles as described in Table 5. This
provides data protection against inadvertent writes.
18
Low V
To protect data during V
Write Inhibit
CC
power-up and power-
CC
down, the device does not accept write cycles
when VCC is less than V
(typically 3.7 volts). The
LKO
command register and all internal program/erase
circuits are disabled, and the device resets to the
Read mode. Writes are ignored until V
than V
. The system must provide the proper
LKO
is greater
CC
signals to the control pins to prevent unintentional
writes when VCC is greater than V
.
LKO
Rev. 5.2/May 01
Page 19

HY29F400
Write Pulse “Glitch” Protection
Noise pulses of less than 5 ns (typical) on OE#,
CE# or WE# do not initiate a write cycle.
Logical Inhibit
Write cycles are inhibited by asserting any one of
the following conditions: OE# = V
WE# = V
. To initiate a write cycle, CE# and WE#
IH
, CE# = VIH, or
IL
must be a logical zero while OE# is a logical one.
Power-Up Write Inhibit
If WE# = CE# = V
and OE# = VIH during power
IL
up, the device does not accept commands on the
rising edge of WE#. The internal state machine is
automatically reset to the Read mode on powerup.
Sector Protection
Additional data protection is provided by the
HY29F400’s sector protect feature, described previously, which can be used to protect sensitive
areas of the Flash array from accidental or unauthorized attempts to alter the data.
Rev. 5.2/May 01
19
Page 20

HY29F400
ABSOLUTE MAXIMUM RATINGS
4
lobmyS retemaraP eulaV tinU
T
GTS
T
SAIB
1
V
V
2NI
I
SO
CC
Notes:
1. Minimum DC voltage on input or I/O pins is –0.5 V. During voltage transitions, input or I/O pins may undershoot V
-2.0V for periods of up to 20 ns. See Figure 9. Maximum DC voltage on input or I/O pins is V
transitions, input or I/O pins may overshoot to V
2. Minimum DC input voltage on pins A[9], OE#, and RESET# is -0.5 V. During voltage transitions, A[9], OE#, and RESET#
may undershoot V
V which may overshoot to 13.5 V for periods up to 20 ns.
to –2.0 V for periods of up to 20 ns. See Figure 9. Maximum DC input voltage on these pins is +12.5
SS
3. No more than one output at a time may be shorted to V
4. Stresses above those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. This is a
stress rating only; functional operation of the device at these or any other conditions above those indicated in the
operational sections of this data sheet is not implied. Exposure of the device to absolute maximum rating conditions for
extended periods may affect device reliability.
RECOMMENDED OPERATING CONDITIONS
erutarepmeTegarotS 521+ot56-Cº
deilppArewoPhtiwerutarepmeTtneibmA 521+ot55-Cº
VottcepseRhtiwniPnoegatloV
:
SS
0.7+ot0.2-
2
#TESER,#EO,]9[A
1
sniPrehtOllA
3
tnerruCtiucriCtrohStuptuO
+2.0 V for periods up to 20 ns. See Figure 10.
CC
. Duration of the short circuit should be less than one second.
SS
1
5.21+ot0.2-
0.7+ot0.2-
002Am
+ 0.5 V. During voltage
CC
V
V
V
to
SS
lobmyS retemaraP eulaV tinU
T
A
erutarepmeTgnitarepOtneibmA07+ot0Cº
:egatloVylppuSgnitarepO
V
CC
snoisreV54-
snoisreVrehtOllA
52.5+ot57.4+
05.5+ot05.4+
V
V
Notes:
1. Recommended Operating Conditions define those limits between which the functionality of the device is guaranteed.
20 ns
0.8 V
20 ns 20 ns
VCC + 2.0 V
- 0.5 V
V
+ 0.5 V
CC
- 2.0 V
20 ns
2.0 V
20 ns 20 ns
Figure 9. Maximum Undershoot Waveform Figure 10. Maximum Overshoot Waveform
20
Rev. 5.2/May 01
Page 21

DC CHARACTERISTICS
TTL/NMOS Compatible
retemaraP noitpircseD puteStseT niM pyT xaM tinU
V=
Vot
V
NI
I
IL
I
TIL
I
OL
tnerruCdaoLtupnI
tnerruCdaoLtupnI
V
VCCV=
#TESER,#EO,]9[A
tnerruCegakaeLtuptuO
V
V
SS
V=
CC
V=
TUO
V=
CC
V=#EC
I
I
I
I
V
V
V
V
V
V
V
1CC
2CC
3CC
4CC
LI
HI
DI
LO
HO
OKL
CC
V
CC
V
CC
V
CC
dellortnoC#EC
egatloVwoLtupnI5.0-8.0V
egatloVhgiHtupnI0.2V
egatloVwoLtuptuO
egatloVhgiHtuptuO
VwoL
CC
Notes:
1. The I
2. Maximum ICC specifications are tested with VCC = VCC Max.
3. I
4. Not 100% tested.
current is listed is typically less than 2 mA/MHz with OE# at VIH.
CC
active while the Automatic Erase or Automatic Program algorithm is in progress.
CC
2,1
tnerruCdaeRevitcA
4,3,2
tnerruCetirWevitcA
2
tnerruCybdnatSLTT
V=#EC
V=#EC
V=
HI
dellortnoC#TESER
2
tnerruCybdnatSLTT
dnaDIcinortcelErofegatloV
V
CC
tcetorpnUrotceSyraropmeT
V=
V
CC
I
LO
V=
V
CC
I
4
egatloVtuokcoL
HO
,
CC
xaM
CC
CC
Vot
SS
xaM
CC
LI
=]9[A;xaM
,
CC
V=#EO,
,
HI
edoMetyB,zHM5=f
V=#EO,
LI
,
HI
edoMdroW,zHM5=f
LI
V=#EO,
HI
#TESER=#EC=#EO
V=#TESER
LI
V0.5=5.115.21V
,niM
CC
Am8.5=
,niM
CC
Am5.2-=
HY29F400
0.1±Aµ
V5.21=#TESER=#EO
9104Am
9105Am
6306Am
4.00.1Am
4.00.1Am
4.2V
2.32.4V
05Aµ
0.1±Aµ
5.0+V
CC
54.0V
Rev. 5.2/May 01
21
Page 22

HY29F400
DC CHARACTERISTICS
CMOS Compatible
retemaraP noitpircseD puteStseT niM pyT xaM tinU
V
V=
Vot
NI
I
IL
I
TIL
I
OL
tnerruCdaoLtupnI
tnerruCdaoLtupnI
V
VCCV=
#TESER,#EO,]9[A
tnerruCegakaeLtuptuO
V
V
SS
V=
CC
V=
TUO
V=
CC
V=#EC
I
I
I
I
V
V
HI
V
DI
V
V
V
V
1CC
2CC
3CC
4CC
LI
CC
V
CC
V
CC
V
CC
dellortnoC#EC
egatloVwoLtupnI5.0-8.0V
egatloVhgiHtupnIVx7.0
LO
HO
OKL
VwoL
CC
egatloVwoLtuptuO
egatloVhgiHtuptuO
Notes:
1. The I
2. Maximum ICC specifications are tested with VCC = VCC Max.
3. I
4. Not 100% tested.
5. I
current is listed is typically less than 2 mA/MHz with OE# at VIH.
CC
active while the Automatic Erase or Automatic Program algorithm is in progress.
CC
= 20 µA maximum for industrial and extended temperature versions.
CC3
2,1
tnerruCdaeRevitcA
4,3,2
tnerruCetirWevitcA
V=#EC
V=#EC
VCCV=
5,2
tnerruCybdnatSSOMC
dellortnoC#TESER
tnerruCybdnatSSOMC
egatloVtuokcoL
VCCV=
5,2
dnaDIcinortcelErofegatloV
V
CC
tcetorpnUrotceSyraropmeT
V
V=
CC
I
LO
V
V=
CC
I
HO
V=
V
CC
I
HO
3
001-=Aµ
,
CC
xaM
CC
CC
Vot
SS
xaM
CC
LI
=]9[A,xaM
,
CC
V=#EO,
,
HI
edoMetyB,zHM5=f
V=#EO,
LI
,
HI
edoMdroW,zHM5=f
LI
CC
=#TESERV
CC
=#TESERV
V=#EO,
HI
=#EC,xaM
± V5.0
CC
,xaM
± V5.0
SS
V0.5=5.115.21V
,niM
CC
Am8.5=
,niM
CC
Am5.2-=
,niM
CC
0.1±Aµ
V5.21=#TESER=#EO
05Aµ
0.1±Aµ
0204Am
8205Am
0305Am
3.05Aµ
3.05Aµ
CC
V
3.0+V
CC
54.0V
Vx58.0
CC
V
4.0-V
CC
V
2.32.4V
22
Rev. 5.2/May 01
Page 23

KEY TO SWITCHING WAVEFORMS
MROFEVAW STUPNI STUPTUO
HY29F400
ydaetS
LotHmorfgnignahC
HotLmorfgnignahC
dettimrePegnahCynA,eraCt'noDnwonknUetatS,gnignahC
TEST CONDITIONS
DEVICE
UNDER
TEST
C
L
Figure 11. Test Setup
3.0 V
6.2
KOhm
+ 5V
2.7
KOhm
All diodes
are
1N3064
or
equivalent
ylppAtoNseoD
Table 7. Test Specifications
tseT
noitidnoC
daoLtuptuOetaGLTT1
ecnaticapaCdaoLtuptuO
C(
)
L
semiTllaFdnaesiRtupnI5502sn
leveLwoLlangiStupnI0.054.054.0V
leveLhgiHlangiStupnI0.34.24.2V
tnemerusaeMgnimiTwoL
leveLlangiS
tnemerusaeMgnimiThgiH
leveLlangiS
etatSecnadepmIhgiHsienilretneC
)ZhgiH(
54- 55-
07-
tinU
09-
0303001Fp
5.18.08.0V
5.10.20.2V
0.0 V
2.4 V
0.45 V
Rev. 5.2/May 01
I
nput
1.5 V
Measurement Level
HY29F400-45 Version
2.0 V
Measurement
Levels
0.8 V
2.0 V
0.8 V
HY29F400-55, -70, -90 Versions
Figure 12. Input Waveforms and Measurement Levels
1.5 V
Output
OutputInput
23
Page 24

HY29F400
AC CHARACTERISTICS
Read Operations
retemaraP
CEDEJ dtS 54- 55- 07- 09-
t
t
t
t
t
t
t
t
VAVA
VQVA
VQLE
ZQHE
VQLG
ZQHG
XQXA
CR
t
CCA
t
EC
t
FD
t
EO
t
FD
t
HEO
t
HO
1
emiTdloH
Notes:
1. Not 100% tested.
2. See Figure 11 and Table 7 for test conditions.
1
emiTelcyCdaeR
yaleDtuptuOotsserddA
elbanEtuptuO
noitpircseD puteStseT
noitpOdeepS
niM54550709sn
V=#EC
LI
xaM54550709sn
LI
xaM54550709sn
LI
xaM51510202sn
xaM52520353sn
LI
xaM51510202sn
yaleDtuptuOotelbanEpihCV=#EO
1
ZhgiHtuptuOotelbanEpihC
yaleDtuptuOotelbanEtuptuOV=#EC
1
ZhgiHtuptuOotelbanEtuptuO
V=#EO
daeRniM0sn
dnaelggoT
gnilloP#ataD
#EC,sesserddAmorfemiTdloHtuptuO
1
tsriFsruccOrevehcihW,#EOro
niM01sn
niM0sn
tinU
Addresses
CE#
OE#
WE#
Outputs
RESET#
t
OEH
t
RC
Addresses Stable
t
ACC
t
OE
t
CE
t
OH
Output Valid
t
DF
24
RY/BY#
0 V
Figure 13. Read Operation Timings
Rev. 5.2/May 01
Page 25

AC CHARACTERISTICS
Hardware Reset (RESET#)
retemaraP
CEDEJ dtS 54- 55- 07- 09-
t
YDAER
t
YDAER
t
PR
t
HR
t
BR
Notes:
1. Not 100% tested.
2. See Figure 11 and Table 7 for test conditions.
htdiWesluP#TESERniM005sn
emiTyrevoceR#YB/YRniM0sn
noitpircseD puteStseT
citamotuAgniruD(woLniP#TESER
1
etirWrodaeRot)smhtiroglA
citamotuAgniruDTON(woLniP#TESER
1
etirWrodaeRot)smhtiroglA
1
daeRerofeBemiThgiH#TESER
HY29F400
noitpOdeepS
xaM02sµ
xaM005sn
niM05sn
tinU
RY/BY#
CE#, OE#
RESET#
RY/BY#
CE#, OE#
RESET#
0 V
t
RH
t
RP
t
Ready
Reset Timings NOT During Automatic Algorithms
t
Ready
t
t
RP
RB
Rev. 5.2/May 01
Reset Timings During Automatic Algorithms
Figure 14. RESET# Timings
25
Page 26

HY29F400
AC CHARACTERISTICS
Word/Byte Configuration (BYTE#)
retemaraP
CEDEJ dtS 54- 55- 07- 09-
t
LFLE
t
HFLE
t
ZQLF
t
VQHF
CE#
OE#
BYTE#
BYTE#
switching
from word to
byte mode
DQ[15]/A-1
DQ[14:0]
t
ELFL
noitpircseD
noitpOdeepS
woLgnihctiwS#ETYBot#ECxaM5sn
hgiHgnihctiwS#ETYBot#ECxaM5sn
Z-hgiHtuptuOotwoLgnihctiwS#ETYBxaM51510202sn
evitcAtuptuOothgiHgnihctiwS#ETYBniM54550709sn
Data Output DQ[14:0] Data Output DQ[7:0]
Output DQ[15] Address Input A-1
tinU
BYTE#
switching
from byte to
word mode
BYTE#
BYTE#
DQ[14:0]
DQ[15]/A-1
CE#
WE#
t
FLQZ
Data Output DQ[7:0] Data Output DQ[14:0]
Address Input A-1 Data Output DQ[15]
t
ELFH
t
FHQV
Figure 15. BYTE# Timings for Read Operations
Falling edge of the last WE# signal
t
SET (tAS
)
t
(tAH)
HOLD
Note: Refer to the Program/Erase Operations table for tAS and tAH specifications.
Figure 16. BYTE# Timings for Write Operations
26
Rev. 5.2/May 01
Page 27

HY29F400
AC CHARACTERISTICS
Program and Erase Operations
retemaraP
CEDEJ dtS 54- 55- 07- 09-
t
t
t
t
t
t
t
t
t
t
t
t
t
t
VAVA
LWVA
XALW
HWVD
XDHW
LWHG
LWLE
HEHW
HWLW
LWHW
1HWHW
2HWHW
3HWHW
CW
t
SA
t
HA
t
SD
t
HD
t
LWHG
t
SC
t
HC
t
PW
t
HPW
t
1HWHW
t
2HWHW
t
3HWHW
V
t
SCV
CC
t
BR
t
YSUB
1
emiTelcyCetirW
emiTputeSsserddAniM0 sn
emiTdloHsserddAniM54545454sn
emiTputeSataDniM52520354sn
emiTdloHataDniM0 sn
emiTputeS#ECniM0 sn
emiTdloH#ECniM0 sn
htdiWesluPetirWniM03035354sn
hgiHhtdiWesluPetirWniM02sn
noitarepOgnimmargorP
noitarepOesarErotceS
noitarepOesarEpihC
emiTputeSniM05sµ
yaleD#YB/YRot#EWniM03030353sn
noitpircseD
niM54550709sn
etirWerofeBemiTyrevoceRdaeRniM0 sn
pyT7sµ
edoMetyB
3,2,1
droW
edoM
5,3,2,1
noitarepOgnimmargorPpihC
droW
edoM
4,2,1
xaM003sµ
pyT21sµ
xaM005sµ
pyT6.3ces
edoMetyB
xaM8.01ces
pyT1.3ces
xaM3.9ces
pyT1ces
xaM8 ces
4,2,1
pyT11ces
xaM88ces
ecnarudnEelcyCmargorPdnaesarE
pyT000,000,1selcyc
niM000,001selcyc
#YB/YRmorfemiTyrevoceRniM0 sn
Notes:
1. Not 100% tested.
2. Typical program and erase times assume the following conditions: 25 °C, V
programming typicals assume a checkerboard pattern. Maximum program and erase times are under worst case conditions of 90 °C, V
3. Excludes system-level overhead, which is the time required to execute the four-bus-cycle sequence for the program
= 4.5 volts (4.75 volts for 55 ns version), 100,000 cycles.
CC
= 5.0 volts, 100,000 cycles. In addition,
CC
command. See Table 5 for further information on command sequences.
4. Excludes 0x00 programming prior to erasure. In the preprogramming step of the Automatic Erase algorithm, all bytes
are programmed to 0x00 before erasure.
5. The typical chip programming time is considerably less than the maximum chip programming time listed since most
bytes program faster than the maximum programming times specified. The device sets DQ[5] = 1 only If the maximum
byte program time specified is exceeded. See Write Operation Status section for additional information.
noitpOdeepS
tinU
Rev. 5.2/May 01
27
Page 28

HY29F400
AC CHARACTERISTICS
Program Command Sequence (last two cycles) Read Status Data (last two cycles)
Addresses
CE#
OE#
WE#
Data
RY/BY#
V
CC
t
VCS
t
WC
t
AS
0x555 PA PA PA
t
GHWL
t
CH
t
WP
t
CS
t
DS
t
WPH
t
DH
0xA0 PD Status
t
AH
t
BUSY
t
WHWH1
D
OUT
t
RB
Notes:
1. PA = Program Address, PD = Program Data, D
2. Commands shown are for Word mode operation.
3. V
shown only to illustrate t
CC
measurement references. It cannot occur as shown during a valid command sequence.
VCS
Figure 17. Program Operation Timings
28
is the true data at the program address.
OUT
Rev. 5.2/May 01
Page 29

AC CHARACTERISTICS
Erase Command Sequence (last two cycles) Read Status Data (last two cycles)
HY29F400
Addresses
CE#
OE#
t
WC
0x2AA VA VA SA
t
GHWL
t
WP
t
CH
t
AS
t
AH
Address = 0x555
for chip erase
WE#
t
WHWH2
t
WHWH3
or
OUT
t
RB
Data
t
CS
t
WPH
t
DS
t
DH
Data = 0x10
for chip erase
0x55 0x30 Status D
t
BUSY
RY/BY#
V
CC
t
VCS
Notes:
1. SA =Sector Address (for sector erase), VA = Valid Address for reading status data (see Write Operation Status section),
D
is the true data at the read address.(0xFF after an erase operation).
OUT
2. Commands shown are for Word mode operation.
3. V
shown only to illustrate t
CC
measurement references. It cannot occur as shown during a valid command sequence.
VCS
Rev. 5.2/May 01
Figure 18. Sector/Chip Erase Operation Timings
29
Page 30

HY29F400
AC CHARACTERISTICS
Addresses
t
RC
VA VA VA
t
CH
t
ACC
CE#
t
CE
OE#
t
DF
t
OH
Complement Complement True Valid Data
Status Data Status Data Data Valid Data
WE#
DQ[7]
DQ[6:0]
t
BUSY
t
OEH
t
OE
RY/BY#
Notes:
1. VA = Valid Address for reading Data# Polling status data (see Write Operation Status section).
2. Illustration shows first status cycle after command sequence, last status read cycle and array data read cycle.
Figure 19. Data# Polling Timings (During Automatic Algorithms)
t
RC
Addresses
t
CH
VA VA VA
t
ACC
VA
CE#
t
CE
OE#
t
DF
t
OH
Valid Status Valid Status Valid Status
(second read)(first read) (stops toggling)
Valid Data
WE#
DQ[6], [2]
t
BUSY
t
OEH
t
OE
RY/BY#
Notes:
1. VA = Valid Address for reading Toggle Bits (DQ2, DQ6) status data (see Write Operation Status section).
2. Illustration shows first two status read cycles after command sequence, last status read cycle and array data read cycle.
Figure 20. Toggle Polling Timings (During Automatic Algorithms)
30
Rev. 5.2/May 01
Page 31

HY29F400
AC CHARACTERISTICS
Enter Erase
Suspend
Program
Erase
Suspend
Program
Erase
Resume
Erase
Suspend
Read
Erase
Erase
Complete
WE#
Enter Automatic
Erase
Erase
Erase
Suspend
Erase
Suspend
Read
DQ[6]
DQ[2]
Notes:
1. The system may use CE# or OE# to toggle DQ[2] and DQ[6]. DQ[2] toggles only when read at an address within an
erase-suspended sector.
Figure 21. DQ[2] and DQ[6] Operation
Sector Protect and Unprotect, Temporary Sector Unprotect
retemaraP
CEDEJ dtS 54- 55- 07- 09-
t
TS
t
PSR
t
EC
t
EO
t
RDIV
t
THLV
t
1PPW
t
2PPW
t
PSEO
t
PSC
Notes:
1. Not 100% tested.
V
ID
RESET#
0 or 5V
t
VIDR
noitpircseD
noitpOdeepS
tinU
emiTputeSegatloVniM4 sµ
rofemiTputeS#TESER
tcetorpnUrotceSyraropmeT
niM4 sµ
yaleDtuptuOotelbanEpihCxaM54550709sn
yaleDtuptuOotelbanEtuptuOxaM52520353sn
V
DI
V
DI
1
tcetorpnUrotceSyraropmeTrofemiTnoitisnarT
tcetorpnUdnatcetorProtceSrofemiTnoitisnarT
niM005sn
1
niM005sn
tcetorProtceSrofhtdiWesluPetirWniM001sµ
tcetorpnUrotceSrofhtdiWesluPetirWniM001sm
1
evitcA#EWotemiTputeS#EO
1
evitcA#EWotemiTputeS#EC
niM4 sµ
niM4 sµ
0 or 5V
t
VIDR
CE#
WE#
RY/BY#
Rev. 5.2/May 01
t
RSP
Figure 22. Temporary Sector Unprotect Timings
31
Page 32

HY29F400
AC CHARACTERISTICS
Sector Protect Cycle Protect Verify Cycle
A[17:12]
A[0]
A[1]
A[6]
V
A[9]
V
OE#
WE#
CE#
ID
ID
t
VLHT
t
VLHT
t
ST
t
OESP
t
WPP1
SA
X
t
ST
t
VLHT
t
OE
t
VLHT
SA
Y
Data
RESET#
V
CC
0x01
t
t
ST
ST
Figure 23. Sector Protect Timings
32
Rev. 5.2/May 01
Page 33

AC CHARACTERISTICS
HY29F400
Sector Unprotect Cycle Unprotect Verify Cycle
A[17:12]
A[0]
A[1]
A[6]
V
A[9]
V
OE#
V
CE#
WE#
SA
0
ID
t
t
VLHT
ID
ID
ST
t
OESP
t
CSP
t
WPP2
t
VLHT
t
ST
t
OE
t
CE
SA
1
Data
RESET#
V
CC
Rev. 5.2/May 01
0x00
t
ST
Figure 24. Sector Unprotect Timings
33
Page 34

HY29F400
AC CHARACTERISTICS
Alternate CE# Controlled Erase/Program Operations
retemaraP
CEDEJ dtS 54- 55- 07- 09-
t
t
t
t
t
t
t
t
t
t
t
t
t
t
VAVA
LEVA
XALE
HEVD
XDHE
LEHG
LELW
HWHE
HELE
LEHE
1HWHW
2HWHW
3HWHW
CW
t
SA
t
HA
t
SD
t
HD
t
LEHG
t
SW
t
HW
t
PC
t
HPC
t
1HWHW
t
2HWHW
t
3HWHW
t
YSUB
1
emiTelcyCetirW
emiTputeSsserddAniM0 sn
emiTdloHsserddAniM54545454sn
emiTputeSataDniM52520354sn
emiTdloHataDniM0 sn
emiTputeS#EWniM0 sn
emiTdloH#EWniM0 sn
htdiWesluP#ECniM03035354sn
hgiHhtdiWesluP#ECniM02sn
noitarepOgnimmargorP
noitarepOesarErotceS
noitarepOesarEpihC
yaleD#YB/YRot#ECniM03030353sn
noitpircseD
niM54550709sn
etirWerofeBemiTyrevoceRdaeRniM0 sn
pyT7sµ
edoMetyB
3,2,1
droW
edoM
5,3,2,1
noitarepOgnimmargorPpihC
droW
edoM
4,2,1
xaM003sµ
pyT21sµ
xaM005sµ
pyT6.3ces
edoMetyB
xaM8.01ces
pyT31.3ces
xaM3.9ces
pyT1ces
xaM8 ces
4,2,1
pyT11ces
xaM88ces
ecnarudnEelcyCmargorPdnaesarE
pyT000,000,1selcyc
niM000,001selcyc
Notes:
1. Not 100% tested.
2. Typical program and erase times assume the following conditions: 25 °C, V
programming typicals assume a checkerboard pattern. Maximum program and erase times are under worst case conditions of 90 °C, V
3. Excludes system-level overhead, which is the time required to execute the four-bus-cycle sequence for the program
= 4.5 volts (4.75 volts for 55 ns version), 100,000 cycles.
CC
= 5.0 volts, 100,000 cycles. In addition,
CC
command. See Table 5 for further information on command sequences.
4. Excludes 0x00 programming prior to erasure. In the preprogramming step of the Automatic Erase algorithm, all bytes
are programmed to 0x00 before erasure.
5. The typical chip programming time is considerably less than the maximum chip programming time listed since most
bytes program faster than the maximum programming times specified. The device sets DQ[5] = 1 only If the maximum
byte program time specified is exceeded. See Write Operation Status section for additional information.
noitpOdeepS
tinU
34
Rev. 5.2/May 01
Page 35

AC CHARACTERISTICS
HY29F400
Addresses
WE#
OE#
CE#
Data
RY/BY#
RESET#
0x555 for Program
0x2AA for Erase
t
WC
t
GHEL
t
WS
t
DS
t
RH
SA for Sector Erase
0x555 for Chip Erase
t
t
WH
t
CP
0xA0 for Program
0x55 for Erase
t
CPH
t
DH
PA for Program
AS
t
AH
PD for Program
0x30 for Sector Erase
0x10 for Chip Erase
t
WHWH1
or t
t
BUSY
WHWH2
or t
WHWH3
Status D
VA
OUT
Notes:
1. PA = program address, PD = program data, VA = Valid Address for reading program or erase status (see Write
Operation Status section), D
= array data read at VA.
OUT
2. Illustration shows the last two cycles of the program or erase command sequence and the last status read cycle.
3. Word mode addressing shown.
4. RESET# shown only to illustrate t
sequence.
measurement references. It cannot occur as shown during a valid command
RH
Figure 25. Alternate CE# Controlled Write Operation Timings
Rev. 5.2/May 01
35
Page 36

HY29F400
Latchup Characteristics
noitpircseD muminiM mumixaM tinU
VottcepserhtiwegatlovtupnI
SS
)#TESERdna#EO,]9[Agnidulcni(
VottcepserhtiwegatlovtupnI
SS
V
CC
Notes:
1. Includes all pins except V
TSOP and PSOP Pin Capacitance
C
C
C
Notes:
1. Sampled, not 100% tested.
2. Test conditions: T
Data Retention
tnerruC001-001Am
. Test conditions: VCC = 5.0V, one pin at a time.
CC
lobmyS retemaraP puteStseT pyT xaM tinU
NI
TUO
2NI
= 25 ºC, f = 1.0 MHz.
A
ecnaticapaCtupnIV
ecnaticapaCtuptuOV
ecnaticapaCniPlortnoCV
retemaraP snoitidnoCtseT muminiM tinU
emiTnoitneteRataDnrettaPmuminiM
snipO/Itpecxesnipllano
snipO/Illano0.1-V
NI
TUO
NI
0.1-5.21V
0.1+V
CC
0=65.7Fp
0=5.821Fp
0=5.79 Fp
Cº05101sraeY
Cº52102sraeY
36
Rev. 5.2/May 01
Page 37

PACKAGE DRAWINGS
Physical Dimensions
TSOP48 - 48-pin Thin Small Outline Package (measurements in millimeters)
0.95
1.05
Pin 1 ID
1
48
HY29F400
11.90
12.10
24
18.30
18.50
19.80
20.20
25
0.05
0.15
0.08
1.20
MAX
0.25MM (0.0098") BSC
o
0
o
5
0.20
0.10
0.21
0.50
0.70
PSOP44 - 44-pin Plastic Small Outline Package (measurements in millimeters)
44
23
0.50 BSC
2.17
2.45
Rev. 5.2/May 01
15.70
16.30
13.10
13.50
O
0
O
8
1
1.27 NOM.
28.00
28.40
0.35
0.50
22
2.80
MAX.
SEATING PLANE
0.10
0.35
0.60
1.00
0.10
0.21
37
Page 38

HY29F400
ORDERING INFORMATION
Hynix products are available in several speeds, packages and operating temperature ranges. The
ordering part number is formed by combining a number of fields, as indicated below. Refer to the ‘Valid
Combinations’ table, which lists the configurations that are planned to be supported in volume. Please
contact your local Hynix representative or distributor to confirm current availability of specific configurations and to determine if additional configurations have been released.
004F92YH XX-XXX
SNOITCURTSNILAICEPS
EGNARERUTAREPMET
=knalB)C°07+ot0(laicremmoC
NOITPODEEPS
=54
=55
=07
=09
sn54
sn55
sn07
sn09
EPYTEGAKCAP
=G
=T
=R
=T
=B
REBMUNECIVED
=004F92YHylnO-tloV5SOMC)61xK652/8xK215(tibageM4
tuoniPesreveR
NOITACOLKCOLBTOOB
noitpOkcolBtooBpoT
noitpOkcolBtooBmottoB
yromeMhsalFesarErotceS
)POSP(egakcaPeniltuOllamScitsalPniP-44
)POST(egakcaPeniltuOllamSnihTniP-84
htiw)POST(egakcaPeniltuOllamSnihTniP-84
VALID COMBINATIONS
deepSdnaegakcaP
POSP POST POSTesreveR
erutarepmeT sn54 sn55 sn07 sn09 sn54 sn55 sn07 sn09 sn54 sn55 sn07 sn09
laicremmoC54-G55-G07-G09-G54-T55-T07-T09-T54-R55-R07-R09-R
Note:
1. The complete part number is formed by appending the Boot Block Location code and the suffix shown in the table above
to the Device Number. For example, the part number for a 90 ns, Commercial temperature range device in the reverse
TSOP package with the top boot block option is HY29F400TR-90.
38
Rev. 5.2/May 01
Page 39

HY29F400
Rev. 5.2/May 01
39
Page 40

HY29F400
Important Notice
© 2001 by Hynix Semiconductor America. All rights reserved.
No part of this document may be copied or reproduced in any
form or by any means without the prior written consent of Hynix
Semiconductor Inc. or Hynix Semiconductor America (collectively “Hynix”).
The information in this document is subject to change without
notice. Hynix shall not be responsible for any errors that may
appear in this document and makes no commitment to update
or keep current the information contained in this document.
Hynix advises its customers to obtain the latest version of the
device specification to verify, before placing orders, that the
information being relied upon by the customer is current.
Devices sold by Hynix are covered by warranty and patent
indemnification provisions appearing in Hynix Terms and Con-
.veR etaD sliateD
..tamrofxinyHotegnahC
2.510/5
ditions of Sale only. Hynix makes no warranty, express, statutory, implied or by description, regarding the information set
forth herein or regarding the freedom of the described devices
from intellectual property infringement. Hynix makes no warranty of merchantability or fitness for any purpose.
Hynix’s products are not authorized for use as critical components in life support devices or systems unless a specific written agreement pertaining to such intended use is executed
between the customer and Hynix prior to use. Life support
devices or systems are those which are intended for surgical
implantation into the body, or which sustain life whose failure
to perform, when properly used in accordance with instructions for use provided in the labeling, can be reasonably expected to result in significant injury to the user.
droceRnoisiveR
.noitcessutatSnoitarepOetirWninoitarepo]6[QDgnidrageretondeddA
.snoitpoerutarepmetdednetxEdnalairtsudnIdevomeR
Memory Sales and Marketing Division Flash Memory Business Unit
Hynix Semiconductor Inc. Hynix Semiconductor America Inc.
10 Fl., Hynix Youngdong Building 3101 North First Street
89, Daechi-dong San Jose, CA 95134
Kangnam-gu USA
Seoul, Korea
Telephone: (408) 232-8800
Telephone: +82-2-580-5000 Fax: (408) 232-8805
Fax: +82-2-3459-3990
http://www.us.hynix.com
http://www.hynix.com
40
Rev. 5.2/May 01
 Loading...
Loading...