

Page 1

查询HMS77C1000A供应商
8-BIT SINGLE-CHIP MICROCONTROLLERS
HMS77C1000A
HMS77C1001A
User’s Manual
(Ver. 2.0)
Page 2
Version 1.1
Published by
MCU Application Team
2001 Hynix Semiconductor All right reserved.
Additional information of this manual may be served by Hynix Semiconductor offices in Korea or Distributors and Representatives listed
at address directory.
Hynix Semiconductor reserves the right to make changes to any information here in at any time without notice.
The information, diagrams and other data in this manual are correct and reliable; however, Hynix Semiconductor is in no way responsible
for any violations of patents or other rights of the third party generated by the use of this manual.
Page 3

HMS77C1000A/HMS77C1001A
Contents of Table
OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . 1
Description . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
BLOCK DIAGRAM . . . . . . . . . . . . . . . . . . . 2
PIN ASSIGNMENT . . . . . . . . . . . . . . . . . . . 3
PACKAGE DIAGRAM . . . . . . . . . . . . . . . . . 4
PIN FUNCTION . . . . . . . . . . . . . . . . . . . . . . 6
PORT STRUCTURES . . . . . . . . . . . . . . . . . 7
ELECTRICAL CHARACTERISTICS . . . . . . 9
Absolute Maximum Ratings . . . . . . . . . . . . . . . 9
Recommended Operating Conditions . . . . . . . 9
DC Characteristics (1). . . . . . . . . . . . . . . . . . . 10
DC Electrical Characteristics (2) . . . . . . . . . . 11
AC Electrical Characteristics (1) . . . . . . . . . . 12
AC Electrical Characteristics (2) . . . . . . . . . . 13
Typical Characteristics . . . . . . . . . . . . . . . . . . 14
ARCHITECTURE . . . . . . . . . . . . . . . . . . . 17
CPU Architecture . . . . . . . . . . . . . . . . . . . . . . 17
MEMORY . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Program Memory . . . . . . . . . . . . . . . . . . . . . . 18
Data Memory . . . . . . . . . . . . . . . . . . . . . . . . . 18
Special Function Registers. . . . . . . . . . . . . . 19
I/O PORTS . . . . . . . . . . . . . . . . . . . . . . . . . 24
Port RA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Port RB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .24
I/O Interfacing . . . . . . . . . . . . . . . . . . . . . . . . .24
I/O Successive Operations . . . . . . . . . . . . . . .24
TIMER0 MODULE AND TMR0 REGISTER 26
Timer Mode . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Counter Mode . . . . . . . . . . . . . . . . . . . . . . . .27
Using Timer0 with an External Clock . . . . . . . 28
Prescaler . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
CONFIGURATION AREA . . . . . . . . . . . . . 30
OSCILLATOR CIRCUITS . . . . . . . . . . . . . 31
XT, HF or LF Mode . . . . . . . . . . . . . . . . . . . .31
RC Oscillation Mode . . . . . . . . . . . . . . . . . . .31
RESET . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Power-On Reset (POR) . . . . . . . . . . . . . . . . . 34
Internal Reset Timer (IRT) . . . . . . . . . . . . . . . 36
WATCHDOG TIMER (WDT) . . . . . . . . . . . 37
WDT Period . . . . . . . . . . . . . . . . . . . . . . . . . .37
WDT Programming Considerations . . . . . . . . 37
Power-Down Mode (SLEEP) . . . . . . . . . . 38
SLEEP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
Wake-up From SLEEP . . . . . . . . . . . . . . . . . . 39
Minimizing Current Consumption . . . . . . . . . . 39
TIME-OUT SEQUENCE AND POWER DOWN
STATUS BITS (TO/PD) . . . . . . . . . . . . . 41
POWER FAIL DETECTION PROCESSOR 42
Oct. 2001 Ver. 2.0
Page 4

HMS77C1000A/HMS77C1001A
HMS77C1000A / HMS77C1001A
CMOS SINGLE-CHIP 8-BIT MICROCONTROLLER
1. OVERVIEW
1.1 Description
The HMS77C1000A and HMS77C1001 A are an advanced CMOS 8-bit mic rocontroller with 0.5K/1K words(12-bit) of
EPROM. The Hynix Semiconductor HMS77C1000A and HMS77C1001A are a powerful microcontroller which provides a
high flexibility and cost effective solution to many small applications. The HMS77C1000 A and HMS77C10 01A provide t he
following standard features: 0.5K/1K words of EPROM, 25 bytes of RAM, 8-bit timer/counter, power-on reset, on-chip oscillator and clock circuitry. In addition, the HMS77C1000A and HMS77C1001A supports power saving modes to reduce
power consumption.
Device name ROM Size RAM Size Package
HMS77C1000A 0.5K words(12-bit) 25 bytes 18 PDIP, SOP or 20 SSOP
HMS77C1001A 1K words(12-bit) 25 bytes 18 PDIP, SOP or 20 SSOP
1.2 Features
• High-Performance RISC CPU:
- 12-bit wide instructions and 8-bit wide data path
- 33 single word instructions
- 0.5K/1K words on-chip program memory
- 25 bytes on-chip data memory
- Minimum instruction execution time
200ns @20MHz
- Operating speed: DC - 20 MHz clock input
- Seven special function hardware registers
- Two-level hardware stack
• Peripheral Features:
- Twelve programmable I/O lines
- One 8-bit timer/counter with 8-bit programmable
prescaler
- Power-On Reset (POR)
- Power Fail Detector : noise immunity circuit
2 level detect ( 2.7V, 1.8V )
- Internal Reset Timer (IRT)
- Watchdog Timer (WDT) with on-chip RC oscillator
- Programmable code-protection
- Power saving SLEEP mode
- Selectable oscillator options: Configuration word
RC: Low-cost RC oscillator (200KHz~4MHz)
XT: Standard crystal/resonator (455KHz~4MHz)
HF: High-speed crystal/resonator (4~20MHz)
LF: Power saving, low-frequency crystal/resonator
(32~200KHz)
• CMOS Technology:
- Low-power, high-speed CMOS EPROM technology
- Fully static design
- Wide-operating range:
2.5V to 5.5V @ RC, XT, LF
4.5V to 5.5V @ HF
Oct. 2001 Ver. 2.0 1
Page 5
HMS77C1000A/HMS77C1001A
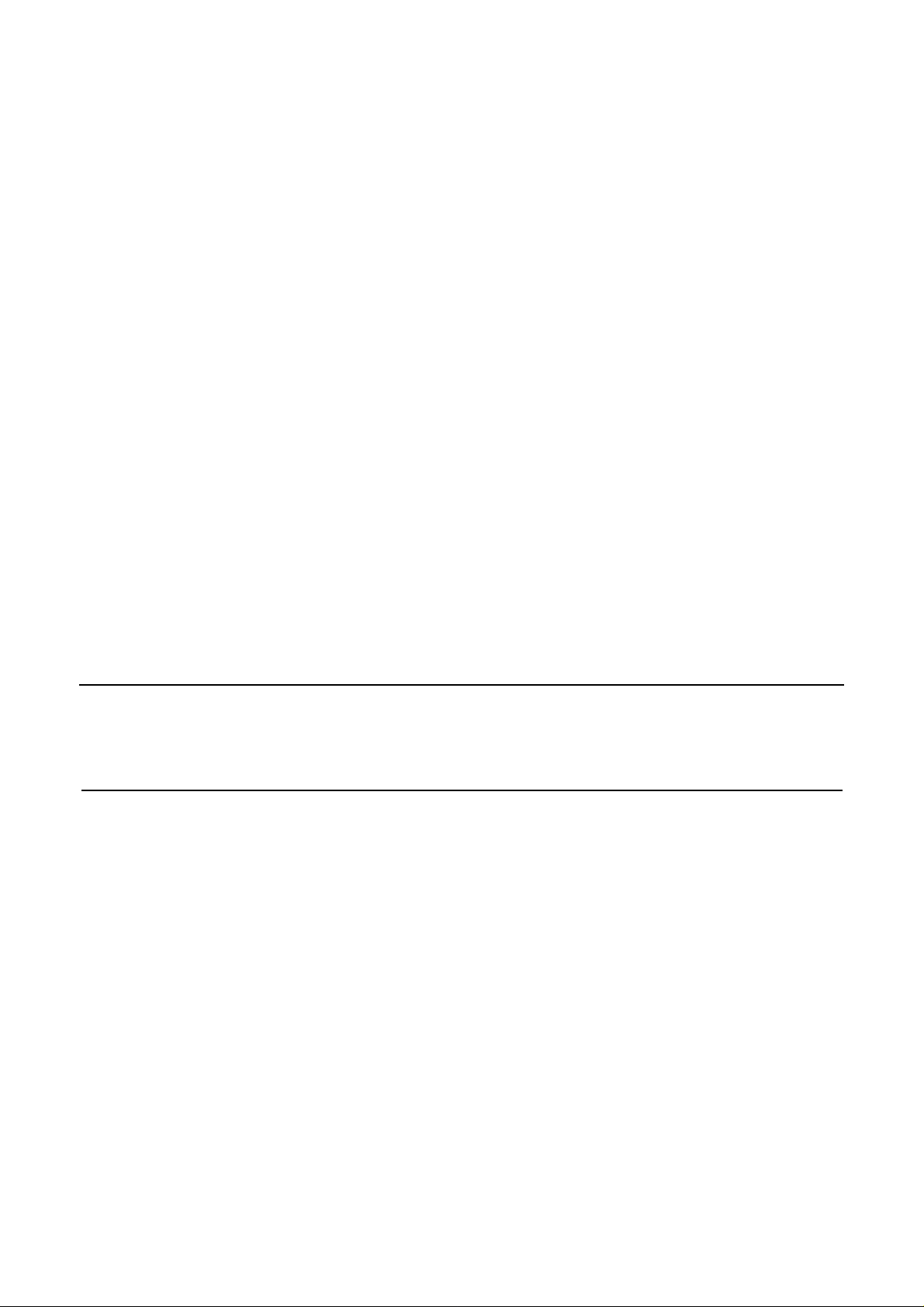
2. BLOCK DIAGRAM
RESET
Xin
Xout
V
DD
V
SS
Power
Supply
OPTION
Power Fail Detector
System controller
Clock Generator
Timing Control
Configuration Word
STATUS
RA RB
RA0
RA1
RA2
RA3
ALU
W
Watch-dog
Timer
TRISA
8-bit
Timer/
Counter
WDT/
TMR0
Prescaler
EC0
Data
Memory
WDT time out
STACK 1
STACK 2
RB0
RB1
RB2
RB3
RB4
RB5
RB6
RB7
TRISB
PC
Program
Memory
Instruction
Decoder
2 Oct. 2001 Ver. 2.0
Page 6
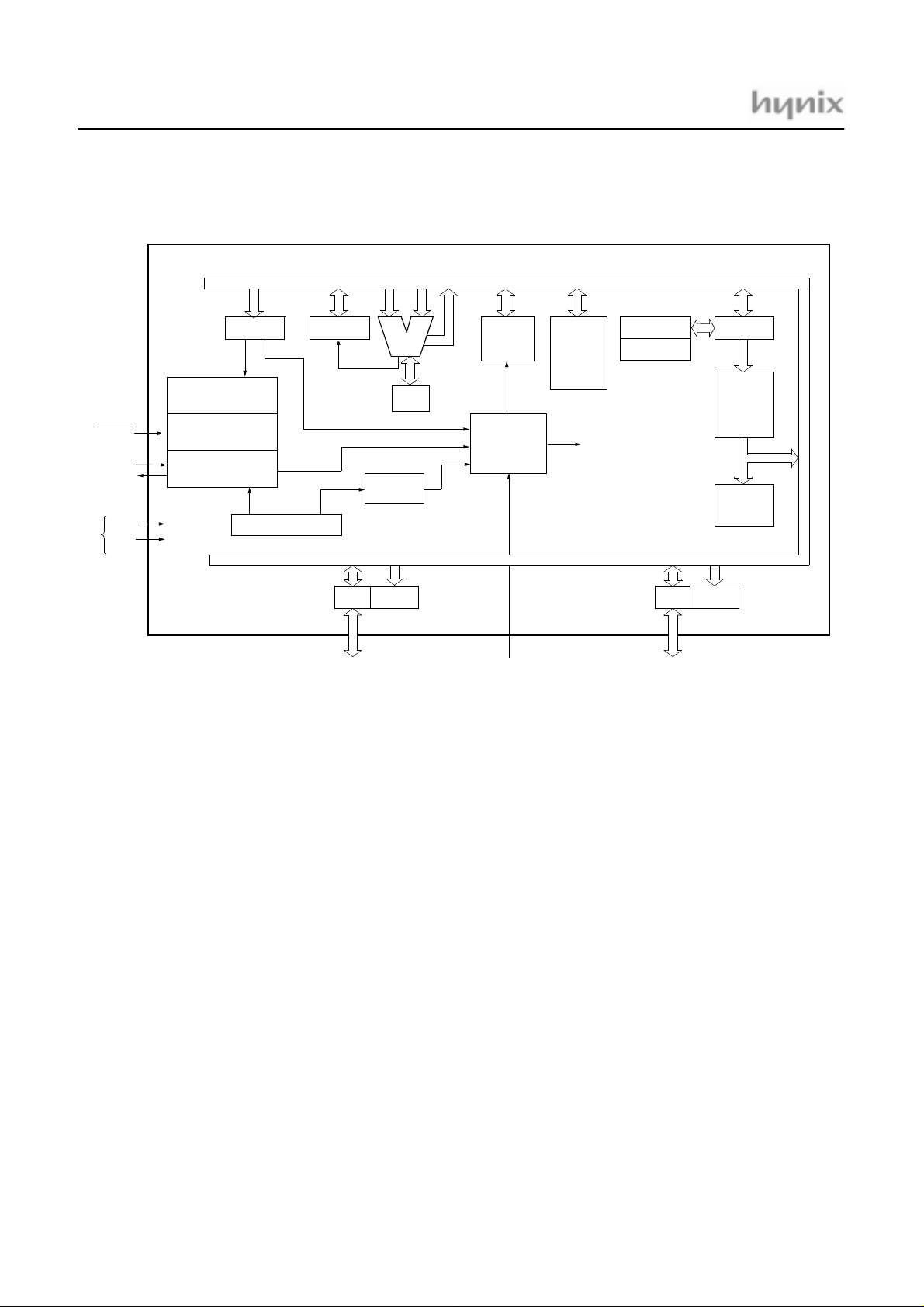
3. PIN ASSIGNMENT
HMS77C1000A/HMS77C1001A
18 PDIP or SOP
RESET
RESET
RA2
RA3
EC0
/V
V
RB0
RB1
RB2
RB3
RA2
RA3
EC0
/V
V
V
RB0
RB1
RB2
RB3
1
2
3
PP
SS
4
5
6
7
8
9
18
17
16
15
14
13
12
11
10
RA1
RA0
Xin
Xout
V
DD
RB7
RB6
RB5
RB4
20 SSOP
1
2
3
PP
SS
SS
4
5
6
7
8
9
10
20
19
18
17
16
15
14
13
12
11
RA1
RA0
Xin
Xout
V
DD
V
DD
RB7
RB6
RB5
RB4
Oct. 2001 Ver. 2.0 3
Page 7
HMS77C1000A/HMS77C1001A
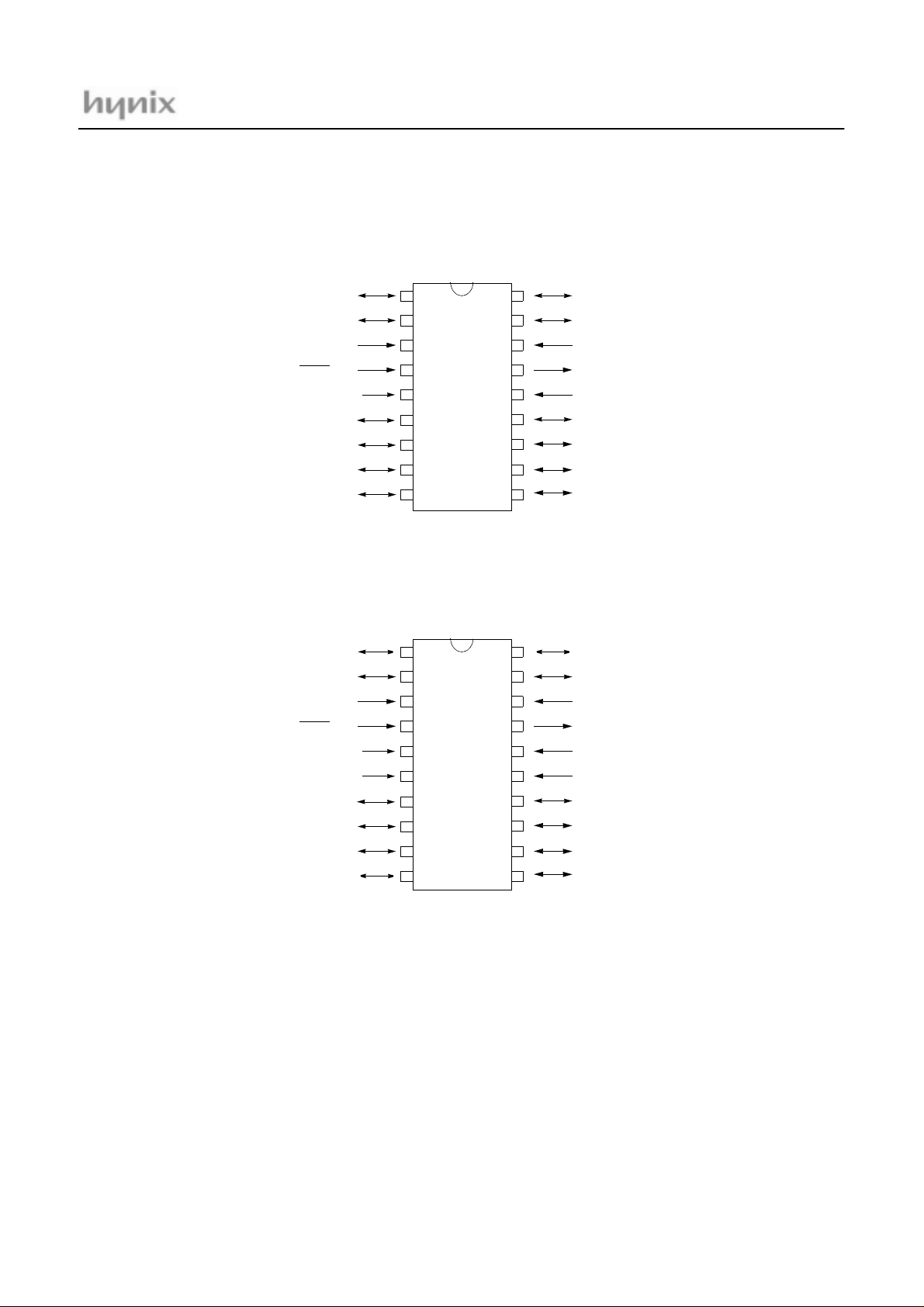
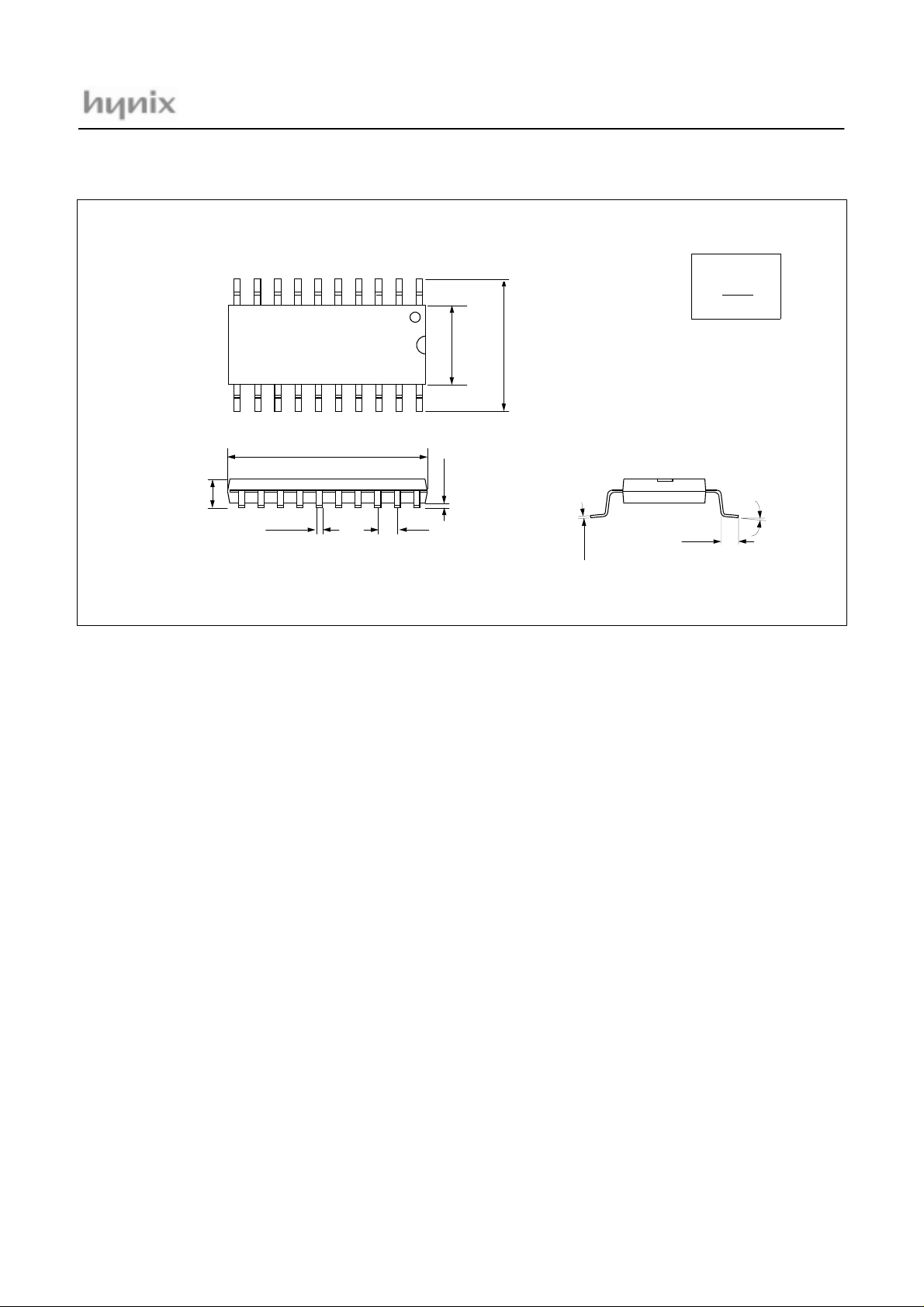
4. PACKAGE DIAGRAM
18 PDIP
unit: inch
MAX
MIN
TYP 0.300
0.925
0.895
MIN 0.020
MAX 0.180
0.120
0.140
0.022
0.015
0.065
0.045
TYP 0.10
0 ~ 15°
0.270
0.245
5
1
0
.
0
8
0
0
.
0
18 SOP
0.292
0.299
0.461
0.451
0.0115
0.104
0.097
0.029
0.014
TYP 0.050
0.410
0.400
0.005
0 ~ 8°
0.0125
0.0091
0.040
0.024
4 Oct. 2001 Ver. 2.0
Page 8
20 SSOP
HMS77C1000A/HMS77C1001A
unit: inch
MAX
MIN
0.205
0.212
0.289
0.278
0.008
0.078
0.068
0.015
0.010
TYP 0.0256
0.311
0.301
0.002
0.037
0.008
0.004
0.025
0 ~ 8°
Oct. 2001 Ver. 2.0 5
Page 9
HMS77C1000A/HMS77C1001A
5. PIN FUNCTION
V
: Supply voltage.
DD
V
: Circuit ground.
SS
RESET
X
: Reset the MCU.
: Input to the inverting oscillator amp lifier and input to
IN
the internal main clock operating circuit.
X
: Output from the inverting oscillator amplifier.
OUT
RA0~RA3
: RA is an 4-bit, CMOS, bidirectional I/O port.
RA pins can be used a s ou tpu ts or i npu ts acc ordi ng t o “0 ”
or “1” written the their Port Direction Register(TRISA).
RB0~RB7
: RB is a 8-bit, CMOS, bidirectional I/O port.
RB pins can be used as outputs or inputs according to “0”
or “1” written the their Port Direction Register(TRISB).
EC0
: EC0 is an external clock input to Timer0. It should
be tied to V
or VDD, if not in use, to reduce current con-
SS
sumption.
PIN NAME
V
DD
V
SS
RESET
X
IN
X
OUT
RA0 17 19
RA1 18 20
RA2 1 1
RA3 2 2
RB0 6 7
RB1 7 8
RB2 8 9
RB3 9 10
RB4 10 11
RB5 11 12
RB6 12 13
RB7 13 14
EC0 3 3
DIP, SOP
Pin No.
14 15,16
55,6
44
16 18
15 17
SSOP
Pin No.
In/Out
Input
Levels
PP-
IST
IST
O-
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
I/O TTL
IST
Function
Supply voltage
Circuit ground
Reset signal input/programming voltage input. This pin is an active low
reset to the device. Voltage on the RESET
avoid unintended entering of programming mode.
Oscillator crystal input/external clock source input
Oscillator crystal output. Connects to crystal or resonator in crystal oscilla-
tor mode. In RC mode, X
quency of X
4-bit bi-directional I/O ports
8-bit bi-directional I/O ports
Clock input to Timer0. Must be tied to VDD or VSS, if not in use, to reduce
current consumption.
, and denotes the instruction cycle rate.
IN
pin outputs CLKOUT which has 1/4 the fre-
OUT
pin must not exceed VDD to
TABLE 5-1 PINOUT DESCRIPTION
Legend : I =input, O = output, I/O = input/output, P = power, - = Not used, TTL = TTL input, ST = Schmitt Trigger input
6 Oct. 2001 Ver. 2.0
Page 10
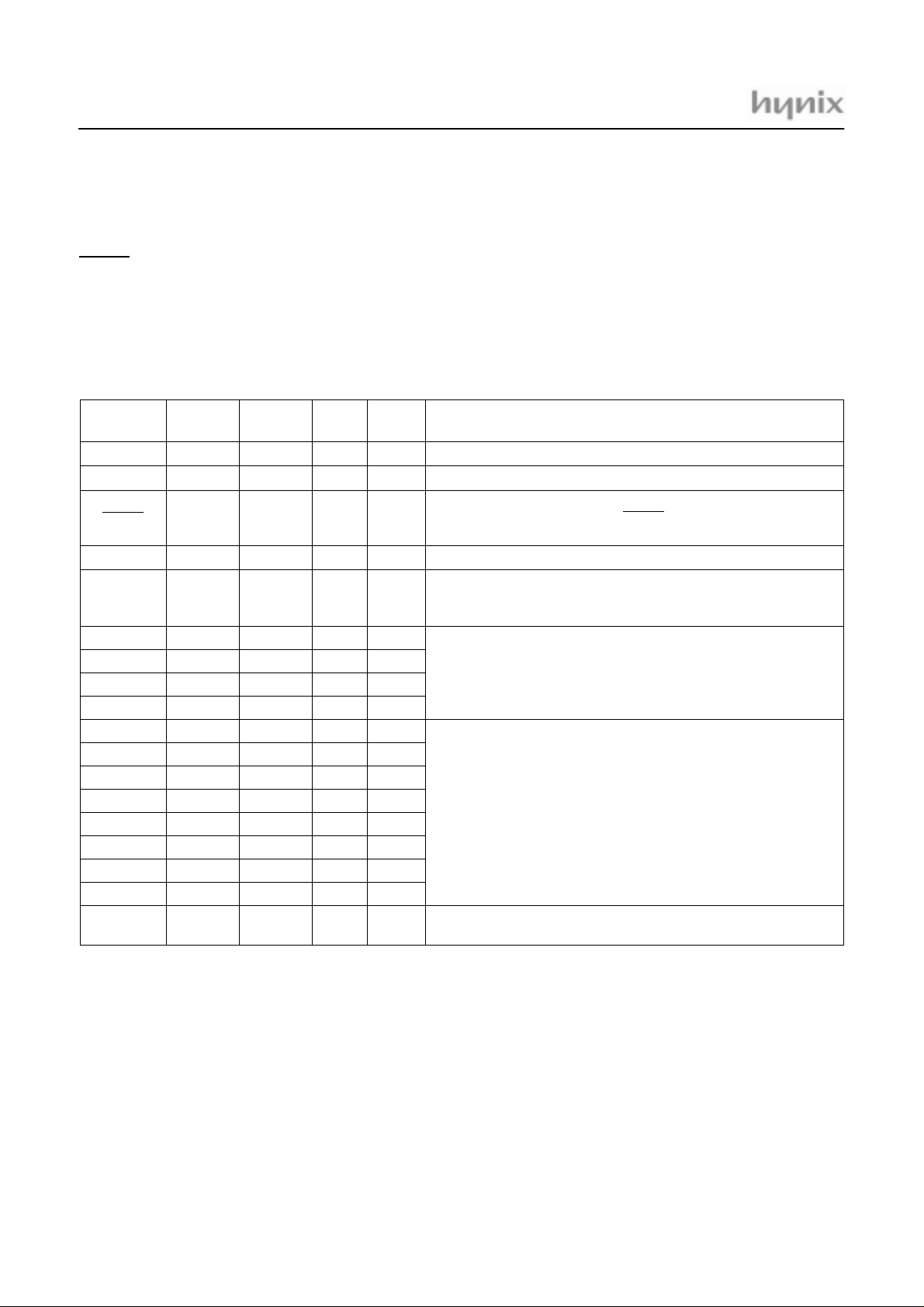
6. PORT STRUCTURES
• RESET
Internal RESET
• Xin, Xout
( XT, HF, LF Mode )
EN ( XT, HF, LF )
HMS77C1000A/HMS77C1001A
V
SS
V
DD
( RC Mode )
To Internal Clock
To Internal Clock
Amplifier varies with
the oscillation mode
EN ( RC )
÷
÷
4
÷ ÷
Internal
Capacitance ( appx. 6pF )
Xout
V
R
SS
F
Xin
V
DD
Xout
V
SS
Xin
Oct. 2001 Ver. 2.0 7
Page 11
HMS77C1000A/HMS77C1001A
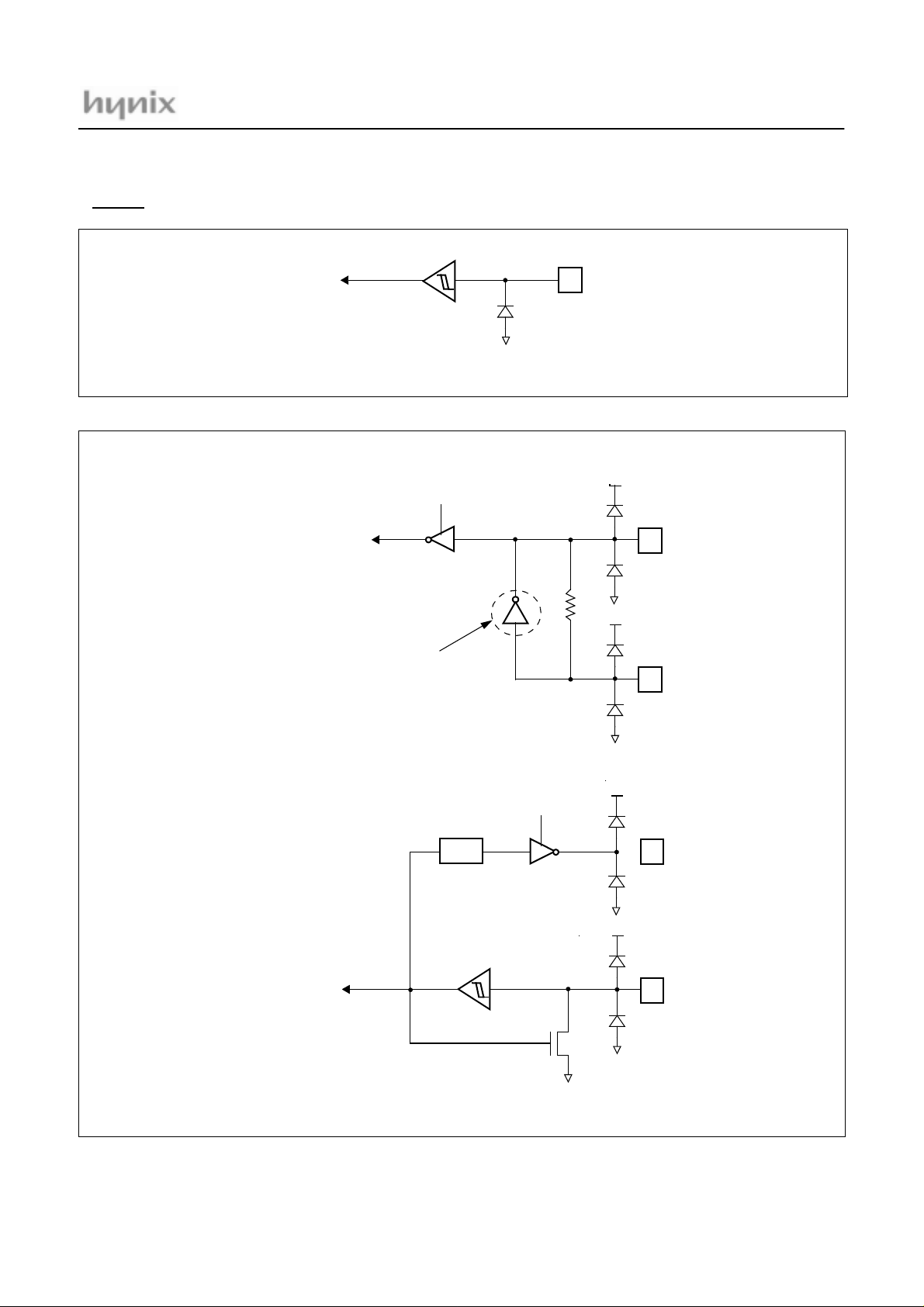
• RA0~3/RB0~7
V
Data Reg.
Data Bus
Direction Reg.
Data Bus
Data Bus
Read
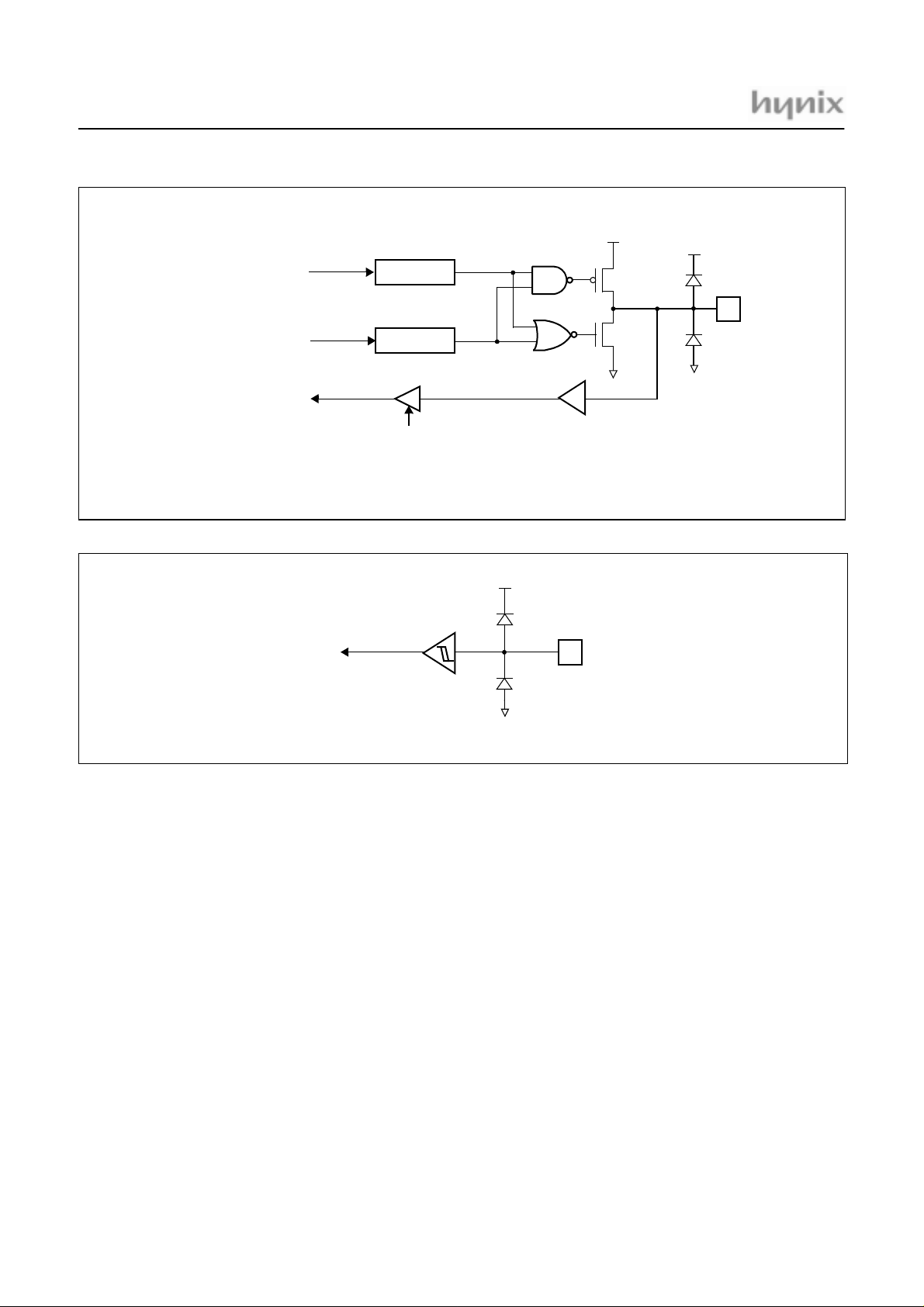
•EC0
DD
V
SS
Timer Counter Clock Input
V
DD
EC0
V
SS
8 Oct. 2001 Ver. 2.0
Page 12
7. ELECTRICAL CHARACTERISTICS
7.1 Absolute Maximum Ratings
HMS77C1000A/HMS77C1001A
Supply voltage..............................................-0 to +7.5 V
Storage Temperature ................................-65 to +125 °C
Voltage on RESET
Voltage on any pin with respect to V
Maximum current out of V
Maximum current into V
Maximum output current sunk by (I
Maximum output current sourc ed by (I
with respect to VSS.......0.3 to 13.5V
.-0.3 to VDD+0.3
SS
pin........................150 mA
SS
pin ..........................100 mA
DD
per I/O Pin)25 mA
OL
per I/O Pin)
OH
...............................................................................20 mA
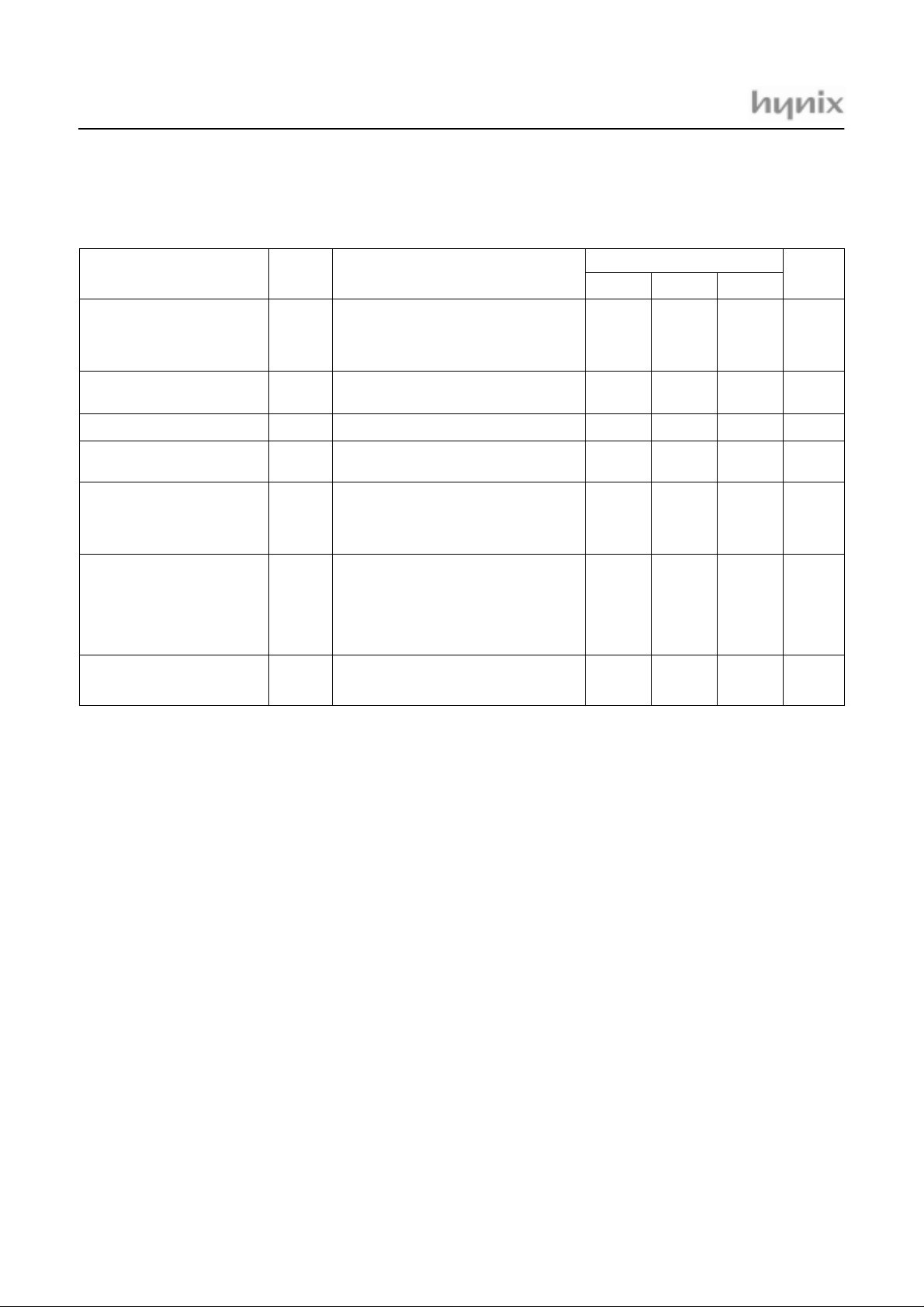
7.2 Recommended Operating Conditions
Parameter Symbol Condition
f
Supply Voltage
Operating Frequency
Operating Temperature
T
V
f
XIN
OPR
DD
XIN
f
XIN
RC Mode 0.2 4
HF Mode 4 20
LF Mode 32 200 KHz
=20MHz
=4MHz
Maximum current (ΣI
Maximum current (ΣI
Note: Stresses above those listed under “Absolute Maxi-
mum Ratings” may cause permanent damage to the
device. This is a stress rati ng only and functi onal operation of the device at any other conditions above
those indicated in the operational sections of this
specification is not implied. Exposure to absolute
maximum rating conditions for extended periods
may affect device reliability.
Min. Max.
4.5 5.5
2.5 5.5
-40 85
)....................................120 mA
OL
)......................................80 mA
OH
Specifications
Unit
V
MHzXT Mode 0.455 4
C
°
Oct. 2001 Ver. 2.0 9
Page 13
HMS77C1000A/HMS77C1001A
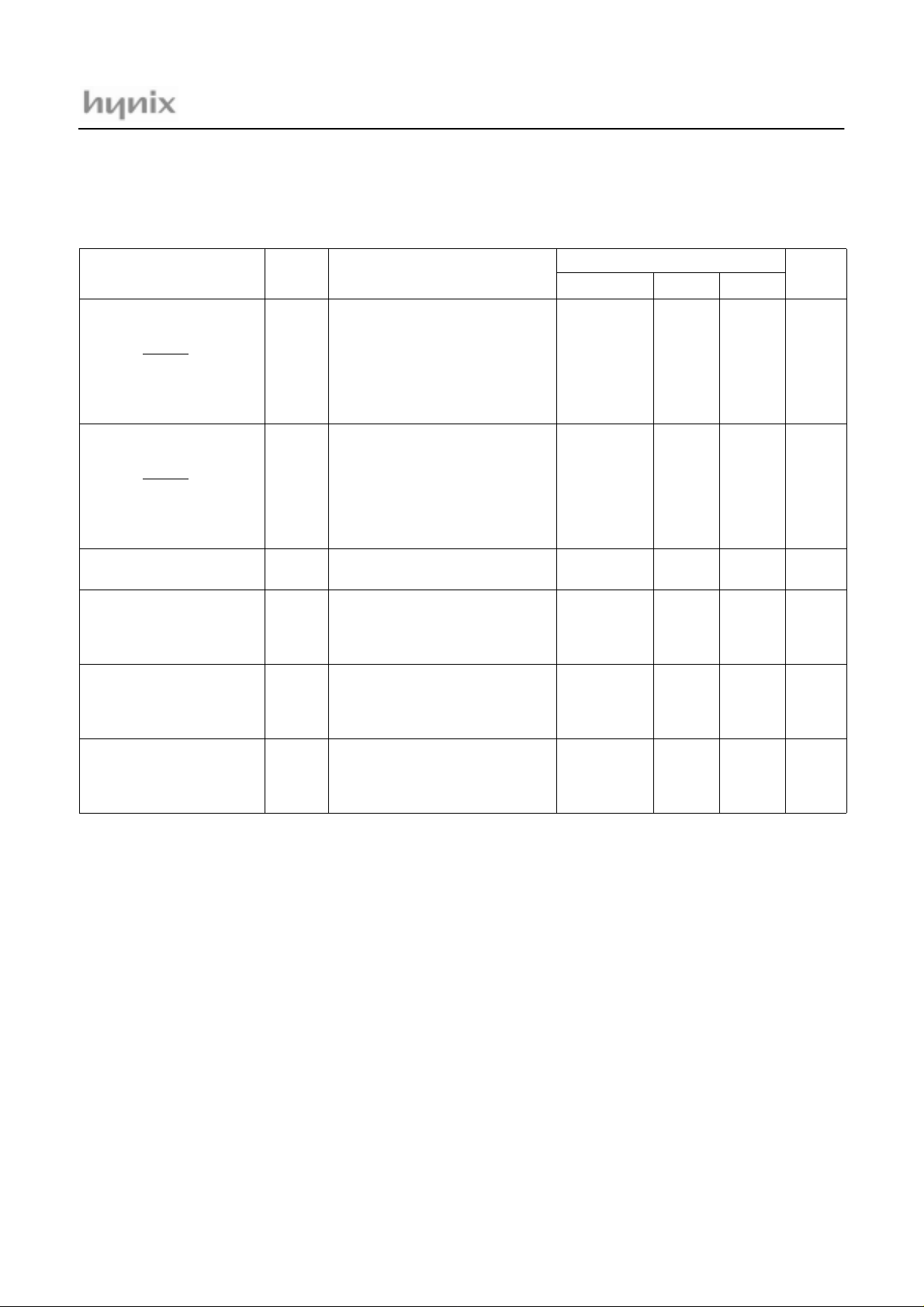
7.3 DC Characteristics (1)
(TA=-40
•
C~+85
°°°°
C)
°°°°
Specification
Parameter Symbol Test Condition
Min
Typ
1
Max
Supply Voltage
V
DD
HF 4.5 5.5
V
start voltage to ensure
DD
Power-On Reset
VDD rise rate
RAM Data Retention
Voltage
V
S
POR
VDD
V
DR
-
2
0.05 - - V/mS
-1.5-V
V
SS
-V
Power Fail Detection
V
PFD
Low Level - 1.8 -
Supply Current
HF
4
I
DD
XT, RC
LF
Power Down Current
1. Data in “Typ” column is at 25°C unless otherwise stated. These parameters are for de sign guidance only and are not tested.
2. This parameter is characterized but not tested.
3. The test conditions for all IDD measurements in NOP execution are:
= external square wave; all I/O pins tristated, pulled to VSS, EC0 = VDD, RESET = VDD; WDT disabled/enabled as specified.
X
IN
4. Does not include current through R
5. Power down current is measured with the part in SLEEP mode, with all I/O pins in hi-impedance state and tied to VDD and VSS as
like measurement conditions of supply current.
I
PD
XIN = 4MHz, VDD = 5V
3
XIN = 20MHz, VDD = 5V
XIN = 32KHz, VDD = 3V, WDT Disabled
VDD = 3V, WDT Enabled
5
VDD = 3V, WDT Disabled
The current through the resistor can be estima te d by the form ula; IR = VDD/2R
ext.
-1.83.3mA
-9.020mA
-1740uA
-414
-0.45
ext
(mA)
Unit
VXT, RC, LF 2.5 5.5
VNormal Level - 2.7 -
uA
10 Oct. 2001 Ver. 2.0
Page 14
7.4 DC Electrical Characteristics (2)
HMS77C1000A/HMS77C1001A
(TA=-40
•
C~+85
°°°°
C)
°°°°
Specification
Parameter Symbol Test Condition
Min
Typ
1
Max
Input High Voltage
I/O Ports (TTL)
RESET, EC0, (ST)
XIN (ST)
XIN (ST)
0.25V
V
IH
RC only
XT, HF, LF
DD
0.85V
0.85V
0.7V
DD
DD
DD
+0.8
V
DD
Input Low Voltage
I/O Ports (TTL)
RESET, EC0, (ST)
XIN (ST)
XIN (ST)
Hysteresis of Schmitt
Trigger Inputs
Input Leakage Current
V
V
HYS
I
V
IL
SS
RC only
XT, HF, LF
DD
2
0.15V
VIN = VDD or V
XT, HF, LF -3.0 0.5 3.0
L
SS
0.15V
0.15V
0.15V
0.3V
DD
DD
DD
DD
Other Pins -1.0 0.2 1.0
Output High Voltage
I/O Ports
X
OUT
V
IOH = -5.0mA, VDD = 4.5V VDD - 0.9 V
OH
IOH = -0.5mA, VDD = 4.5V, RC osc.
DD
Output Low Voltage
I/O Ports
X
OUT
1. Data in “Typ” column is at 25°C unless otherwise stated. These parameters are for de sign guidance only and are not tested.
2. This parameter are characterized but no t teste d.
V
IOL = 8.0mA, VDD = 4.5V V
OL
IOL = 0.6mA, VDD = 4.5V, RC osc.
SS
0.8
Unit
V
V
V
uAXIN (ST)
V
V
Oct. 2001 Ver. 2.0 11
Page 15

HMS77C1000A/HMS77C1001A
7.5 AC Electrical Characteristics (1)
•(TA=-40
C~+85
°°°°
°°°°
C)
Parameter Symbol Test Condition
External Clock Input
Frequency
Oscillator Frequency
1
External Clock Input
Period
Pin
1
1
Oscillator Period
Clock in X
IN
Low to High Time
Clock in X
IN
Pin
1
Rise or Fall Time
1. This parameter is characterized but not tested.
F
XIN
F
XIN
T
XIN
T
XIN
L
T
XIN
T
H
XIN
R
T
XIN
T
F
XIN
Specification
Min Typ Max
Unit
XT osc mode DC - 4.0 MHz
HF osc mode DC - 20 MHz
LF osc mode DC - 200 KHz
RC osc mode DC - 4.0 MHz
XT osc mode 0.1 - 4.0 MHz
HF osc mode 4.0 - 20 MHz
LF osc mode 5.0 - 200 KHz
XT osc mode 250 - - nS
HF osc mode 50 - - nS
LF osc mode 5 - - uS
RC osc mode 250 - - nS
XT osc mode 250 - 10,000 nS
HF osc mode 50 - 250 nS
LF osc mode 5 - 200 uS
XT osc mode 85 - - nS
HF osc mode 20 - - nS
LF osc mode 2 - - uS
XT osc mode - - 25 nS
HF osc mode - - 25 nS
LF osc mode - - 50 nS
12 Oct. 2001 Ver. 2.0
Page 16

7.6 AC Electrical Characteristics (2)
HMS77C1000A/HMS77C1001A
(TA=-40
•
RESET
Watchdog Timer Time-Out
Period ( No-prescaler )
Internal Reset Timer Period
C~+85
°°°°
Parameter
C)
°°°°
1
Pulse Width (Low)
Symbol Test Condition
T
RESETVDD
T
WDT
T
IRT
= 5V
VDD = 5V
VDD = 5V
Specification
Min
Typ
2
Max
100 - - nS
91830mS
91830mS
EC0 High or Low Pulse Width
T
H
No Prescaler 10 - -
T
EC0
EC0
With Prescaler
T
= 4 X T
CY
L
XIN
0.5T
CY
+ 20
--
EC0 Period
No Prescaler 20 - -
T
EC0
With Prescaler
1. These parameters are characterized but not tested.
2. Data in “Typ” column is at 25°C unless otherwise stated. These parameters are for de sign guidance only and are not tested.
X
IN
N = Prescaler Value
P
( 1,2,4,......256 )
T
XIN
(TCY+40) / N
H
T
XIN
L
T
XIN
0.15V
--
0.85V
DD
Unit
nS
nS
RESET
EC0
T
R
T
XIN
T
RESET
T
EC0
H
T
EC0
T
EC0
P
F
XIN
0.15V
DD
H
0.85V
DD
0.15V
DD
Oct. 2001 Ver. 2.0 13
Page 17

HMS77C1000A/HMS77C1001A
7.7 Typical Characteristics
These graphs and tables are for de sign guidance only an d
are not tested or guaranteed.
In some graphs or tables the data presented are outside specified operating range (e.g. outside specified
VDD range). This is for information only and devices
are guaranteed to operate properly only within the
specified range.
Operating Area
f
XIN
(MHz)
Ta= 25°C
24
20
16
12
8
4
0
23
45
V
DD
6
(V)
The data is a statistical summary of data collected on units
from different lots over a period of time. “Typical” represents the mean of the distribution while “max” or “min”
represents (mean + 3σ) and (mean − 3σ) respectively
where σ is standard deviation
Normal Operation
−
V
I
DD
Ta=25°C
f
XIN
23
DD
= 20MHz
4MHz
32KHz
45
V
DD
(V)
6
I
DD
(mA)
4
3
2
1
0
I
OL
(mA)
40
32
24
16
−
V
I
OL
8
0
, VDD=5V
OL
Ta=25°C
0.4 0.8 1.2 1.6 2.0
V
(V)
−
V
I
OL
I
OL
(mA)
Ta=25°C
18
12
6
OL
0
, VDD=3V
OL
0.4 0.8 1.2 1.6 2.0
V
(V)
OL
14 Oct. 2001 Ver. 2.0
Page 18

HMS77C1000A/HMS77C1001A
−
V
I
OH
(mA)
-20
-16
-12
-8
-4
0
I
OH
Ta=25°C
, VDD=5V
OH
0.5 1.0 1.5
2.0
Typical RC Oscillator
F
OSC
(MHz)
7.5
6.0
4.5
3.0
1.5
Frequency VS. V
Cext=0pF
Ta=25°C
0
2.5 3 4 5 6
3.5 4.5 5.5
DD
R=3.3K
R=5K
R=15K
R=100K
V
DD-VOH
(V)
−
V
I
OH
(mA)
-8
-6
-4
-2
I
OH
0
, VDD=3V
OH
Ta=25°C
0.5 1.0 1.5
VDD-V
(V)
OH
Typical RC Oscillator
F
OSC
(MHz)
4.5
4.0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
V
DD
(V)
Frequency VS. V
Cext=20pF
Ta=25°C
0
2.5 3 4 5 6
3.5 4.5 5.5
DD
R=3.3K
R=5K
R=15K
R=100K
V
DD
(V)
Typical RC Oscillator
F
OSC
(MHz)
2.00
1.75
1.50
1.25
1.00
0.75
0.50
0.25
Frequency VS. V
Cext=100pF
Ta=25°C
0
2.5 3 4 5 6
3.5 4.5 5.5
DD
R=3.3K
R=5K
R=15K
R=100K
F
OSC
(MHz)
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
V
DD
(V)
Typical RC Oscillator
Frequency VS. V
Cext=300pF
Ta=25°C
0
2.5 3 4 5 6
3.5 4.5 5.5
DD
R=3.3K
R=5K
R=15K
R=100K
V
DD
(V)
Oct. 2001 Ver. 2.0 15
Page 19

HMS77C1000A/HMS77C1001A
Cext Rext
3.3K 6.5MHz
0pF
15K 2.3MHz
100K 400KHz
3.3K 4.3MHz
20pF
15K 1.4MHz
100K 240KHz
3.3K 1.8MHz
100pF
15K 610KHz
100K 100KHz
3.3K 780KHz
300pF
15K 260KHz
100K 42.5KHz
Average
Fosc @ 5V,25°C
5K 5.4MHz
5K 3.5MHz
5K 1.5MHz
5K 630KHz
Table 7-1 RC Oscillator Frequencies
16 Oct. 2001 Ver. 2.0
Page 20

8. ARCHITECTURE
8.1 CPU Architecture
HMS77C1000A/HMS77C1001A
The HMS700 core is a RISC-based CPU and uses a modified Harvard architecture. This architecture uses two separate memories with separate address buses, one for the
program memory and the other for the data memory. This
architecture adapts 33 single word instructions that are 12bit wide instruction and has an internal 2-stage pipeline
(fetch and execute), which results in execution of one instruction per single cy cle(200ns @ 20MHz) exc ept for program branches.
Instruction
Immediate Data
Instruction
Decode
&
Control
Unit
Control
Signals
Indirect Address
The HMS77C100XA can address 1K x 12 Bits program
memory and 25 Bytes data memory. And it can directly or
indirectly address data memory.
The HMS700 core has three special function registers PC, STATUS and FSR - in data memory map and has ATU
(Address Translation Unit) to provide address for data
memory and has an 8-bit general purpose ALU and working register(W) as an accumulator. The W register consists
of 8-bit register and it can not be an addressed register.
Program Memory Address
PC with 2-level Stack
STATUS
FSR
Address Translation
Unit
ALU
Status
ALU
Data Bus
FIGURE 8-1 HMS700 CPU BLOCK DIAGRAM
W
Data Memory Bus
Oct. 2001 Ver. 2.0 17
Page 21

HMS77C1000A/HMS77C1001A
9. MEMORY
The HMS77C100XA has se parate memory maps for program memory and data memory. Program memory can
only be read, not written to. It can be up to 1K words of
program memory. Data memory can be read and written to
32 bytes including speci al function registers.
9.1 Program Memory
PC<9:0>
Stack Level 1
Stack Level 2
The program memory is organized as 0.5K, 12-bit wide
words(HMS77C1000A) and 1K, 12-bit wide
words(HMS77C1001A). The program memory words are
addressed sequentially by a program counter. Incrementing at location 1FF
(HMS77C1000A) or 3FF
H
(HMS77C1001A) will cause a wrap around to 000H.
Figure 9-1 and Figure 9-2 show a map of program memo-
ry. After reset, CPU begins execution from rese t vector
which is stored in address(1FF
: HMS77C1000A, 3FFH:
H
HMS77C1001A).
PC<8:0>
Stack Level 1
Stack Level 2
000
H
0FF
H
100
H
1FF
H
FIGURE 9-1 HMS77C1000A PROGRAM MEMORY MAP
AND STACK
On-chip
Program
Memory
Reset Vector
Space
User Memory
000
H
0FF
H
100
1FF
200
2FF
300
3FF
H
H
H
H
H
H
H
On-chip
Program
Memory
(Page 0)
On-chip
Program
Memory
(Page 1)
Reset Vector
Space
User Memory
FIGURE 9-2 HMS77C1001A PROGRAM MEMORY MAP
AND STACK
9.2 Data Memory
The data memory consists of 25 bytes of RAM and seven
special function registers. The data memory locations are
addressed directly or indirectly by using FSR.
Figure 9-3 shows a map of data memory. The special function registers are mapped into the data memory..
File Address
00
H
01
H
02
H
03
H
04
H
05
H
06
H
INDF
TMR0
PCL
STATUS
FSR
RA
RB
0F
10
00
06
07
1F
H
H
H
H
H
H
Special
Function
Registers
DATA
MEMORY
(SRAM)
DATA
MEMORY
(SRAM)
FIGURE 9-3 HMS77C100XA DATA MEMORY MAP
18 Oct. 2001 Ver. 2.0
Page 22

9.3 Special Function Registers
HMS77C1000A/HMS77C1001A
This devices has seven special function register that are the
INDF register, the Program Counter(PC), the STATUS
register, File Select Register(FSR), 8-bit Timer(TMR0),
and I/O data register(RA, RB).
The Special Function Registers are registers used by the
CPU and peripheral functions to control the operation of
the device (Table 9-1).
TMR0, RA and RB are not in the G700 CPU. They are lo-
cated in each peripheral function blocks. All special function register are placed on data memory map. The INDF
register is not a physical register and this register is used
for indirect addressing mode...
Name Address Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
TRIS N/A I/O control registers (TRISA, TRISB)
OPTION N/A
INDF
TMR0
PCL
STATUS
FSR
RA
RB
00
01
02
03
04
05
06
H
H
H
H
H
H
H
Contains control bits to configure Timer0, Timer0/WDT
prescaler and PFD
Uses contents of FSR to address data memory (not a
physical register)
8-bit real-time cloc k/counter
Low order 8bits of PC
- - PA0 TO PD ZDCC
Indirect data memory address pointer
- - - - RA3 RA2 RA1 RA0
RB7 RB6 RB5 RB4 RB3 RB2 RB1 RB0
Power-On
Reset
RESET and
WDT Reset
1111 1111 1111 1111
0011 1111 0011 1111
xxxx xxxx uuuu uuuu
xxxx xxxx uuuu uuuu
1111 1111 1111 1111
0001 1xxx 000q quuu
1xxx xxxx 1uuu uuuu
---- xxxx ---- uuuu
xxxx xxxx uuuu uuuu
TABLE 9-1 SPECIAL FUNCTION REGISTER SUMMARY
Legend : Shaded boxes = unimplemented or unused, - = unimplemented, read as ‘0’
x = unknown, u = unchanged, q = see the tables in Section 17 for possible values.
9.3.1 INDF Register
The INDF register is not phy sicall y impl emented regist er,
used for indirect addressing mode. If the INDF register
Direct Addressing Indirect Addressing
are accessed, CPU goes to indirect addressing mode. Then
CPU accesses the Data memory which address is the contents of FSR.
If the INDF register are accessed in indirect addressing
location
select
00
mode(I.e., FSR=00H), 00H will be loaded into data bus.
This time, note the arithmetic status bits of STATUS register may be affected.
The FSR<4:0> bits are used to select data memory addresses 00
to 1FH.
H
Data
Memory
0F
10
HMS77C1000A and HMS77 C1001 A do not use ba nking .
FSR<7:5> are unimplemented and read as '1's.
1F
FIGURE 9-4 DIRECT/INDIRECT ADDRESSING
(FSR)
4040(opcode)
location
H
H
H
H
select
Oct. 2001 Ver. 2.0 19
Page 23

HMS77C1000A/HMS77C1001A
9.3.2 TMR0 Register
The TMR0 register is a data register for 8-bit timer/
counter. In reset state, the TMR0 register is initialized with
“00
”.
H
9.3.3 Program Counter (PC)
The program counter contains the 10-bit address of the instruction to be executed(9-bit address for
HMS77C1000A).
The lower 8 bits of the program counter are contained in
the PCL register which can be pr ovid ed b y the in struc tio n
word for a call instruction, or any instruction where the
PCL is the destination while the ninth bit of the program
counter comes from the page address bit - PA0 of the STATUS register(HMS77C1001A only).
This is necessary to cause program branches across program memory page boundaries.
Prior to the execution of a branch operation, the user must
initialize the PA0 bit of STATUS register.
The eighth bit of the program counter can come from the
instruction word by execution of goto instruction, or can be
cleared by execution of call or any instruction where the
PCL is the destination.
subroutine call instruction
87 0
PC
Reset to ‘0’
FIGURE 9-5 LOADING OF BRANCH INSTRUCTION -
HMS77C1000A
jump instruction
9
PC
PA0
subroutine call Instruction
87 0
9
PC
PCL
Instruction Word
80
PCL
Instruction Word
PCL
In reset state, the program counter is initialized with
“1FF
”(HMS77C1000A) or “3FFH”(HMS77C1001A).
H
Note: Because PC<8> is cleared in the subroutine call in-
struction, or any Modify PCL instruction, all subroutine calls or computed jumps are limited to the fi rst
256 locations of any program memory page (512
words long).
jump instrunciton
80
PC
PCL
Instruction Word
Instruction Word
Reset to ‘0’
PA0
FIGURE 9-6 LOADING OF BRANCH INSTRUCTION -
HMS77C1001A
9.3.4 Stack Operation
The HMS77C100XA have a 2-level hardware stack. The
stack register consists of two 9-bit save registers(HMS77C1000A), 10-bit save registers(HMS77C1001A). A physical transfer of register
contents from the progr am co unter to the s tack o r vice ver sa, and within the stack, occurs on call and return instructions. If more than two sequential call instructions are
executed, only the most recen t two return address are
stored. If more than two sequential return instructions are
executed, the stack will be filled with the ad dress previously stored in level 2. The stack cannot be read or written by
20 Oct. 2001 Ver. 2.0
Page 24

HMS77C1000A/HMS77C1001A
program.
RESET status, and the page select bit for program memories larger than 512 words.
HMS77C1001A(HMS77C1000A)
The STATUS register can be the destina tion for any instruction, as with any other register. If the STATUS regis-
9(8)
PC
subroutine call
STACK LEVEL1
subroutine call
return
return
0
ter is the destination for an instruction that affects the Z,
DC or C bits, then the write to these three bits is disabled.
These bits are set or cleared according to the device logic.
Furthermore, the TO
fore, the result of an instruction with the STATUS register
as destination may be different than intended.
It is recommended that only instructions that do not affect
STACK LEVEL2
status of CPU be used on STATUS register. Care should be
exercised when writing to the STATUS register as the
ALU status bits are updated upon completion of the write
FIGURE 9-7 OPERATION OF 2-LEVEL STACK
9.3.5 STATUS Register
operation, possibly leaving the STATUS register with a result that is different than intended. In reset state, the STATUS register is initialized with “00011XXX
This register contains the arithmetic status of the ALU, the
R/W
-
bit7 bit0
- PA0
R
TO
R
PD
R/W
Z
R/W
DC
R/W
C
and PD bits are not writable. There-
”.
B
ADDRESS ; 03
RESET VALUE : 0001_1XXX
R = Readable bit
W = Writable bit
H
PA0: Program memory page select bits
0 = page 0 (000h - 1FFh) - HMS77C1000A/
1001A
1 = page 1 (200h - 3FFh) - HMS77C1001A
TO
: Time-overflow bit
1 = After power-up, w at c hd og cle ar i nstruction, or
entering power-down mode
0 = A watchdog timer time-overflow occurred
PD
: Power-down bit
1 = After power-up or by the watchdog clear
instruction
0 = By execution of power-down mode
Z: Zero bit
1 = The result of an arithmetic or logic operatio n
is zero
0 = The result of an arithmetic or logic operatio n
is not zero
DC: Digit carry/borrow
(for addition and subtraction)
addition
1 = A carry from the 4th low order bit of the result
occurred
0 = A carry from the 4th low order bit of the result
did not occur
subtraction
1 = A borrow from the 4th low orde r bit of the
result did not occur
0 = A borrow from the 4th low orde r bit of the
result occurred
C: Carry/borrow
(for additon,subtraction and rotation)
addition
1 = A carry occurred
0 = A carry did not occur
subtraction
1 = A borrow did not occur
0 = A borrow occurred
rotation
Load bit with LSB or MSB, respec tively
bit
bit
FIGURE 9-8 STATUS REGISTER
Oct. 2001 Ver. 2.0 21
Page 25

HMS77C1000A/HMS77C1001A
9.3.6 FSR Register
The FSR register is an 8-bit register. The lower 5 bits are
used to store indirect address for dat a memory. The upper
3 bits are unimplemented and read as “0”. Figure 9-9
shows how the FSR register can be used in indirect ad-
Instruction Word
11 5 04
OPCODE
Direct Addressing mode
Data Memory Address
FIGURE 9-9 FSR REGISTER AND DIRECT/INDIRECT ADDRESSING MODE
80
dressing mode.
In reset state, the FSR register is initialized with
“1XXX_XXXX
4
--
-
Indirect Addressing mode
10
FSR
”.
B
Address : 04H
RESET Value: 1XXX_XXXX
B
9.3.7 OPTION Register
The OPTION register consists of 8-bit write-only register
and can not addressed. This register is able to control the
status of PFD, TMR0/WDT prescaler and TMR0.
To modify the OPTION register, the content of W register
are transferred to the OPTION regi ster by executing the
OPTION instruction.
In reset state, the OPTION register is initialized with
“00111111
” .
B
22 Oct. 2001 Ver. 2.0
Page 26

HMS77C1000A/HMS77C1001A
W
LOWOPTWPFDENWT0CSWT0SE
bit7 6 bit054321
LOWOPT: Power-fail detection level select bit.
1 = Lowered detection level (1.8V @ 5V)
0 = Normal detection level (2.7V @ 5V)
PFDEN: Power-fail detection enable bit
1 = Enable power-fail detection
0 = Disable power-fail detection
T0CS: Timer 0 clock source select bit
1 = Transition on EC0 pin
0 = Internal instruction cycle clock
T0SE: Timer 0 source edge select bit
1 = Increment on high-to-low transition on
EC0
0 = Increment on low - to - high t ra nsi tio n on
EC0
PSA: Prescaler assignment bit
1 = Prescaler assi gned to the WDT
0 = Prescaler assigned to the Timer 0
W
PSA
W
PS2
W
PS1
PS2-PS0: Prescaler rate select bits)
Bit Value Timer 0 rate WDT rate
000 1:2 1:1
001 1:4 1:2
010 1:8 1:4
011 1:16 1:8
100 1:32 1:16
101 1:64 1:32
110 1:128 1:64
111 1:256 1:128
W
PS0
ADDRESS ; N/A
RESET VALUE : 0011_1111
W = Writable bit
-n = Value at POR reset
FIGURE 9-10 OPTION REGISTER
Oct. 2001 Ver. 2.0 23
Page 27

HMS77C1000A/HMS77C1001A
10. I/O PORTS
The HMS77C100XA has a 4-bit I/O port(RA) and a 8-bit
I/O port(RB).
All pin have data(RA,RB) and direction(TRISA,TRIS B)
registers which can assign these ports as output or input.
A “0” in the port direction registers configure the corresponding port pin as output. Conversely, write “1” to the
corresponding bit to specify it as input pin (Hi-Z state).
For example, to use the even numbered bit of RB as output
ports and the odd numbered bits as input ports, write “55
H
to TRISB register during initial setting as shown in Figure
10-1.
All the port direction registers in the HMS77C100XA have
“1” written to them by reset function. This causes all port
as input.
Write “55H” to port RB direction register
716051403120110
TRISB
PORT RB
0
OUT IN OUT IN OUT IN OUT IN
10.2 Port RB
RB is an 8-bit I/O register. Each I/O pin can indepe ndently
used as an input or an output through th e port direction reg ister, TRISB. A “0” in the TRISB register configure the
corresponding port pin as output. Conversely, write “1”to
the corresponding bit to specify it as input pin.
RB Data Register
”
RB77RB66RB55RB4
RB
RB Direction Register
TRISB
FIGURE 10-3 RB PORT REGISTERS
Note: A read of the ports reads the pins, not the output
data latches. That is, if an output driver on a pin is
enabled and driven high, but the external system is
holding it low, a read of the port will indicate that the
pin is low.
ADDRESS : 06
RESET VALUE : Undefined
4
RB33RB22RB11RB0
ADDRESS : N/A
RESET VALUE : FF
H
0
H
FIGURE 10-1 EXAMPLE OF PORT I/O ASSIGNMENT
10.1 Port RA
RA is a 4-bit I/O register. Each I/O pin can independently
used as an input or an output throu gh the port direction register, TRISA. A “0” in the TRISA register configure the
corresponding port pin as output. Conversely, write “1”to
the corresponding bit to specify it as input pin.
Bits 7-4 are unimplemented and read as '0's.
RA Data Register
RA
RA33RA22RA11RA0
RA Direction Register
TRISA
FIGURE 10-2 RA PORT REGISTERS
ADDRESS : 05
RESET VALUE : Undefined
0
ADDRESS : N/A
RESET VALUE : 0F
H
H
10.3 I/O Interfacing
The equivalent circuit for an I/O port pin is shown in Figure 10-4. All ports may be used for both input and output
operation.
For input operations these ports are non-latching. Any input must be present until read by an input instruction. The
outputs are latched and remain unchanged until the output
latch is rewritten. To use a port pi n as output, the corresponding direction control bit (in TRISA, TRISB) must be
cleared (= 0). For use as an input, the corresponding TRIS
bit must be set. Any I/O pin can be programmed individually as input or output..
10.4 I/O Successive Operations
The actual write to an I/O port happens at the end of an instruction cycle, whereas for reading, the data must be valid
at the beginning of the instruction cy cle (Figure 10-5).
Therefore, care must be exercised if a write followed by a
read operation is carried out on the same I/O port.
The sequence of instructions should allow the pin voltage
to stabilize (load dependent) before the next instruction,
which causes that file to be read into the CPU, is executed .
24 Oct. 2001 Ver. 2.0
Page 28

Data Reg.
Data Bus
Direction Reg.
Data Bus
Data Bus
Read
FIGURE 10-4 EQUIVALENT CIRCUIT FOR A SINGLE I/O PIN
HMS77C1000A/HMS77C1001A
V
DD
V
SS
Name Address Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
TRIS N/A I/O control registers (TRISA, TRISB)
RA
RB
05
06
H
H
- - - - RA3 RA2 RA1 RA0
RB7 RB6 RB5 RB4 RB3 RB2 RB1 RB0
Power-On
Reset
1111 1111 1111 1111
---- xxxx ---- uuuu
xxxx xxxx uuuu uuuu
TABLE 10-1 SUMMARY OF PORT REGISTERS
Legend: Shaded boxes = unimplemen ted or unused, - = unimplemented, read as ‘0’, x = unknown, u = unc han ged.
Otherwise, the previous state of that pi n may be read into
the CPU rather than the new state.
When in doubt, it is better to separate these instructions
with a NOP or another instruction not accessing this I/O
port.
Instruction
fetched
RB7:RB0
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
PC
output RB
PC+1 PC+2 PC+3
read RB port
Port pin
written here
no operation no operation
Port pin
read here
This example s hows a write
to RB followed by a read
from RB.
RESET and
WDT Reset
FIGURE 10-5 SUCCESSIVE I/O OPERATION
Oct. 2001 Ver. 2.0 25
Page 29

HMS77C1000A/HMS77C1001A
11. TIMER0 MODULE AND TMR0 REGISTER
The Timer0 module has the following features:
•
8-bit timer/counter register, TMR0
• 8-bit software programmable prescaler
• Internal or external clock select
TCY ( = F
EC0
pin
Watchdog
Timer
WDT Enable bit
OSC
T0SE
/4)
0
MUX
1
T0CS
0
MUX
1
PSA
8-bit Prescaler
8 - to - 1 MUX
0
MUX
• Edge select for external clock
Figure 11-1 is a simplified block diagram of the Timer0
module, while Fig ure 11-2 sh ows the el ectrical stru cture of
the Timer0 input
1
0
clear
8
1
MUX
PSA
PSA
.
Sync with
Internal
Clocks
(2cycle delay)
PS2:PS0
Data bus
8
TMR0 reg
WDT Time-Out
FIGURE 11-1 BLOCK DIAGRAM OF THE TIMER0/WDT PRESCALER
ECO
pin
P
N
Note 1: ESD protection circuits
R
IN
(1)
Schmitt Trigger
Input Buffer
FIGURE 11-2 ELECTRICAL STRUCTURE OF EC0 PIN
Noise Filter
26 Oct. 2001 Ver. 2.0
Page 30

HMS77C1000A/HMS77C1001A
11.1 Timer Mode
If the OPTION register bit5(T0CS) is cleared, the timer
mode is selected and is operated with internal system clock
). The Timer0 module will increment every instruc-
(T
CY
tion cycle (without prescaler). If TMR0 register is written,
the increment is inhibited for the following two cycles. The
user can work around this by writin g an adjusted v alue to
the TMR0 register.
Figure 11-3 and Figure 11-4 show the timing diagram of
Timer.
- No Prescaler (PSA=0)
Timer will increment every instruction cycle(Q4).
PC
(Program
Counter)
Instruction
Fetch
Instruction
Executed
TMR0
Q1 Q2 Q3 Q4PCQ1 Q2 Q3 Q4
PC-1
[ W ’ TMR0 ]
T0 T0+1 T0+2 NT0 NT0+1 NT0+2
Q1 Q2 Q3 Q4
PC+1
[ TMR0 ’ W ] [ TMR0 ’ W ] [ TMR0 ’ W ] [ TMR0 ’ W ] [ TMR0 ’ W ]
Write TMR0
executed
Q1 Q2 Q3 Q4
PC+2
Read TMR0
reads NT0
- With Prescaler (PSA=1)
Timer will increment with prescaler division ratio.
@ PS2~PS0 = (1:2) ~ (1:256)Counter Mode
11.2 Counter Mode
If the OPTION register bit5(T0CS) is set, the counter
mode is selected and operates with event clock input.
In this mode, Timer0 will increment either on every rising
or falling edge of pin EC0. The incrementing edge is determined by the source edge sel ect bit T0SE (OPT ION<4>).
Clearing the T0SE bit selects the rising edge.
Q1 Q2 Q3 Q4
PC+3
Read TMR0
reads NT0
Q1 Q2 Q3 Q4
PC+4
Read TMR0
reads NT0
Q1 Q2 Q3 Q4
PC+5
Read TMR0
reads NT0+1
Q1 Q2 Q3 Q4
PC+6
Read TMR0
reads NT0+2
Timer0
Clock
increment inhibited
FIGURE 11-3 TIMER0 TIMING: INTERNAL CLOCK/NO PRESCALE
PC
(Program
Counter)
Instruction
Fetch
Instruction
Executed
TMR0
Timer0
Clock
Q1 Q2 Q3 Q4PCQ1 Q2 Q3 Q4
PC-1
[ W ’ TMR0 ]
T0 T0+1 NT0 NT0+1
Q1 Q2 Q3 Q4
PC+1
[ TMR0 ’ W ] [ TMR0 ’ W ] [ TMR0 ’ W ] [ TMR0 ’ W ] [ TMR0 ’ W ]
Write TMR0
executed
Q1 Q2 Q3 Q4
PC+2
Read TMR0
reads NT0
increment inhabited
Q1 Q2 Q3 Q4
Read TMR0
reads NT0
PC+3
Q1 Q2 Q3 Q4
PC+4
Read TMR0
reads NT0
Q1 Q2 Q3 Q4
PC+5
Read TMR0
reads NT0+1
Q1 Q2 Q3 Q4
PC+6
Read TMR0
reads NT0+2
FIGURE 11-4 TIMER0 TIMING: INTERNAL CLOCK/PRESCALER 1:2
Oct. 2001 Ver. 2.0 27
Page 31

HMS77C1000A/HMS77C1001A
Name Address Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
TMR0
01
H
8-bit real-time clock/counter
OPTION N/A LOWOPT PFDEN T0CS T0SE PSA PS2 PS1 PS0
TABLE 11-1 REGISTERS ASSOCIATED WITH TIMER0
Legend: x = unknown, u = unchang ed.
11.3 Using Timer0 with an External Clock
When an external clock input is used for Timer0, it must
meet certain requirements. The external clock requirement
is due to internal phase clock (T
so, there is a delay in the actual incrementing of Timer0 after synchronization.
11.3.1 External Clock Synchronization
) synchronization. Al-
OSC
chronization and the increment of the counter mode.
• EC0 clock specification
- No Prescaler (PSA = 0)
High or low time(min) ≥ 2T
- With Prescaler (PSA = 1)
High or low time(min) ≥ 4T
But, there is a noise filter on the EC0 pin, the minimum low
or high time(10ns) should be required.
The synchronization of EC0 input with the internal phase
clocks is accomplished by sampling EC0 clock or the prescaler output on the Q2 and Q4 falling of the internal phase
clocks.
After the synchronization, counter increments on the next
instruction cycle (Q4). There is a small delay from the time
the external clock edge occurs to the time the Timer0 mod-
11.3.2 Timer0 Increment Delay
Since the prescaler output is synchronized with the internal
clocks, there is a small delay from the time the external
clock edge occurs to the time the Timer0 module is actual-
ly incrementing. Figure 11-5 shows the delay from the ex -
ternal clock edge to the timer incrementing.
ule is actually incrementing. Figure 11-5 shows the syn-
Power-On
Reset
RESET and
WDT Reset
xxxx xxxx uuuu uuuu
0011 1111 0011 1111
+ 20ns
XIN
+ 40ns
XIN
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
External Clock Input or
Prescaler Output
External Clock/Prescaler
Output After Sampling
Increment TMR0 (Q4)
TMR0
Note 1: Delay from clock input change to TMR0 increment is 3T
Therefore, the error in measuring the interval between two edges on TMR0 input =
2: External clock if no prescaler selected, prescaler output otherwise.
3: The arrows indicate the points in time where sampling occurs.
(2)
(1)
(3)
FIGURE 11-5 TIMER0 TIMING WITH EXTERNAL CLOCK
11.4 Prescaler
The prescaler may be used by either the Timer0 module or
the Watchdog Timer, b ut not both. Thus, a prescaler assignment for the Timer0 module means that there is no
prescaler for the WDT, and vice-versa.
The prescaler assignment is controlled in software by the
Q1 Q2 Q3 Q4
Small Pulse
misses sampling
T0 T0+1
to 7T
XIN
XIN
T0+2
. (Duration of Q = T
4T
±
XIN
XIN
).
max.
control bit PSA (OPTION<3>). Clearing the PSA bit will
assign the prescaler to Timer0. The prescaler is neither
readable nor writable.
The PSA and PS2:PS0 bits (OPTION<3:0>) determine
prescaler assignment and prescale ratio. When the prescaler is assigned to the Timer0 module, prescale values of 1:2,
28 Oct. 2001 Ver. 2.0
Page 32

HMS77C1000A/HMS77C1001A
1:4,..., 1:256 are selectable.
When assigned to the Timer0 module, all instructions writ-
ing to the TMR0 register will clear the prescaler. When as-
signed to WDT, a CLRWDT instruction will clear the
prescaler along with the WDT.
On a RESET, the prescaler contains all '0's.
Oct. 2001 Ver. 2.0 29
Page 33

HMS77C1000A/HMS77C1001A
12. CONFIGURATION AREA
The device configuration area can be programmed o r left
unprogrammed to select devic e confi gurat io ns such as os cillator type, security bit or watchdog timer enable bit.
bit11 4
AAA
H
AAAH+1
AAAH+2
AAA
+3
H
FFF
H
-
-
-
-
Configuration Word
FIGURE 12-1 DEVICE CONFIGURATION AREA
bit11 bit04321
Configuration Wo r d
Unimplemented, read as ‘0’
bit 3 CP : Code protection bit.
1 = Code protection disabled
0 = Code protection enabled
bit 2 WDTE: Watchdog timer enable bit
1 = WDT enabled
0 = WDT disabled
bit 1-0 FOSC1:FOSC0: Oscillator selection bits
11 = RC oscillator
10 = HF oscillator
01 = XT oscillator
00 = LF oscillator
bit03
ID0
ID1
ID2
ID3
Four memory locations [AAAH ~ (AAA+3)H] are designated as customer ID recording locations where the user
can store check-sum or other customer identification numbers. These area are not accessible during normal execution but are readable and writable during program/verify
mode. It is recommended th at only the 4 least signific ant
bits of ID recording locations are used.
CP WDTE FOSC1 FOSC0-
Address
: FFF
H
FIGURE 12-2 CONFIGURATION WORD FOR HMS77C100XA
30 Oct. 2001 Ver. 2.0
Page 34

13. OSCILLATOR CIRCUITS
HMS77C1000A/HMS77C1001A
HMS77C100XA supports four user-selectable oscillator
modes. The oscillator modes are selected by programming
the appropriate values into the configuration word.
- XT : Crystal/Resonator
- HF : High Speed Crystal/Resonator
- LF : Low Speed and Low Power Crystal
- RC : External Resistor/Capacitor
13.1 XT, HF or LF Mode
In XT, LF or HF modes, a crystal or ceramic resonator is
connected to the X
and X
IN
(Figure 13-1). The HMS77C100XA oscillator design requires the use of a parallel cut crystal. Use of a series cut
crystal may give a frequency out of the crystal manufacturers specifications. Bits 0 and 1 of the config uration register
(FOSC1:FOSC2) are used to configure the different external resonator/crystal oscillator modes. These b its allow the
selection of the appropriate gain setting for the internal
driver to match the desired opera ting frequency. Wh en in
XT, LF or HF modes, the device can have an external clock
source drive the X
X
pin should be left open.
OUT
(1)
C1
(1)
C2
Note 1: See Capacitor Selection tables for recommended
values of C1 and C2.
2: RF varies with the crystal chosen
(approx. value = 9 M
pin (Figure 13-2). In this case, the
IN
X
OUT
XTAL
X
IN
pins to establish oscillation
OUT
SLEEP
To internal
Ω).
RF
(2)
logic
Osc
Type
Resonator
Freq
XT 455 kH z
2.0 MHz
4.0 MHz
HF 4.0 MHz
8.0 MHz
16.0 MHz
Cap.Range
C1
22-100 pF
15-68 pF
15-68 pF
15-68 pF
10-68 pF
10-22 pF
Cap. Range
C2
22-100 pF
15-68 pF
15-68 pF
15-68 pF
10-68 pF
10-22 pF
TABLE 13-1 CAPACITOR SELECTION FOR CERAMIC
RESONATORS
Note: These values are for design guidance only. Since
each resonator has its own characteristics, the us er
should consult the resonat or manufacturer for appropriate value s of external components.
Osc
Type
LF
XT 100 kHz
HF 4 MHz
Crystal
Freq
32 kHz
100 kHz
200 kHZ
200 kHz
455 kHz
1 MHz
2 MHz
4 MHz
8 MHz
20 MHz
1
Cap.Range
C1
15 pF
15-30 pF
15-30 pF
15-30 pF
15-30 pF
15-30 pF
15-30 pF
15-30 pF
15-47 pF
15-30 pF
15-30 pF
15-30 pF
Cap. Range
C2
15 pF
30-47 pF
15-82 pF
200-300 pF
100-200 pF
15-100 pF
15-30 pF
15-30 pF
15-47 pF
15-30 pF
15-30 pF
15-30 pF
TABLE 13-2 CAPACITOR SELECTION FOR CRYSTAL
For V
DD
> 4.5V, C1 = C2 ≈ 30 pF is recommended.
1.
FIGURE 13-1 CRYSTAL OR CERAMIC RESONATOR
(HF, XT OR LF OSC CONFIGURATION)
Note: These values are for design guidance only. Since
each crystal has its own characteristics, the user
should consult the crystal manufacturer for appropriate values of external components.
If you change from this device to another device,
Clock from
ext. system
OPEN
X
IN
HMS77C100XA
X
OUT
please verify oscillator characteristics in your
application.
13.2 RC Oscillation Mode
The external RC oscillator mode provides a cost-effective
approach for applications that do not require a precise op-
FIGURE 13-2 EXTERNAL CLOCK INPUT OPERATION
(HF, XT OR LF OSC CONFIGURATION)
erating frequency. In this mode, the RC oscillator frequen -
Oct. 2001 Ver. 2.0 31
Page 35

HMS77C1000A/HMS77C1001A
cy is a function of the supply voltage, the resistor(R) and
capacitor(C) values, and the operating temperature.
In addition, the oscillator frequency will vary from unit to
unit due to normal manufac turing p rocess v ariatio ns. Furthermore, the difference in lead frame capacitance between
package types also affects the oscillation frequency, especially for low C values. The external R and C co mponent
tolerances contribute to oscillator frequency variation as
well.
The user also needs to take into account variation due to
tolerance of external R and C components used.
Figure 13-3 shows how the R is connected to the
HMS77C100XA. For Rext values below 2.2 kΩ, the oscillator operation may become unstab le, or stop completely .
For very high Rext values (e.g., 1 MΩ) the oscillator becomes sensitive to noise, humidity and leakage. Thus, we
recommend keeping Rext betwee n 3 kΩ and 100 kΩ. Table 13-3 shows recommended value of Rext and Cext .
Although the oscillator will operate with no ext ernal capacitor (Cext = 0 pF), it is recommend using values abov e
20 pF for noise and stability reasons. With no or small external capacitance, the osc illatio n frequen cy can v ary dra matically due to changes in external capacitances, such as
PCB trace capacitance or package lead frame capacitance.
Cext Rext
Average F
@ 5V, 25°C
XIN
The Electrical Specifications sections show R frequency
variation from part to part due to normal process variation.
Also, see the Electrical Specifications sections for variation of oscillator frequency due to V
for given Rext/Cext values as well
DD
as frequency variation due to operating temperature for given R,
C, and V
DD
values.
The oscillator frequency , divided by 4, is avail able on th e
pin, and can be used for test purposes or to synchro-
X
OUT
nize other logic.
V
DD
R
ext
X
IN
X
N
OUT
C
ext
F
/4
XIN
FIGURE 13-3 RC OSCILLATION MODE
Internal
Clock
0pF
20pF
100pF
300pF
3.3K
5K
15K
100K
3.3K
5K
15K
100K
3.3K
5K
15K
100K
3.3K
5K
15K
100K
6.5MHz
5.4MHz
2.3MHz
400KHz
4.3MHz
3.5MHz
1.4MHz
240KHz
1.8MHz
1.5MHz
610KHz
100KHz
780KHz
630KHz
260KHz
42.5KHz
TABLE 13-3 RC OSCILLATION FREQUENCIES
32 Oct. 2001 Ver. 2.0
Page 36

14. RESET
HMS77C1000A/HMS77C1001A
HMS77C100XA devices may be reset in one of the following ways:
- Power-On Reset (POR)
- Power-Fail detect reset (PFDR)
- RESET (normal operati o n)
- RESET wake-up reset (from SLEEP)
- WDT reset (normal operation)
- WDT wake-up reset (from SLEEP)
Each one of these reset conditions causes the program
counter to branch to reset vector address. (HMS77C1000A
is 1FF
and HMS77C1001A is 3FFH ).
H
Table 14-1 shows these reset conditions for the PCL and
STATUS registers.
Some registers are not affected in any reset condition.
Their status is unknown on POR and unchanged in any
other reset. Most other registers are reset to a “reset state”
on Power-On Reset (POR), PFDR, RESET
A RESET
or WDT wake-up from SLEEP also results in a
or WDT reset.
device reset, and not a continuation of operation before
SLEEP.
The TO
and PD bits (STATUS <4:3>) are set or cleared
depending on the different reset con ditions. These bits may
be used to determine the nature of the reset.
Table 14-2 lists a full description of reset states of all registers. Figure 14-1 shows a simplifie d block diagram of the
on-chip reset circuit.
Condition
Power-On Reset
RESET reset or PFD
reset (normal operation)
RESET wake-up or PFD
reset (from SLEEP)
WDT reset (normal
operation)
WDT wake-up (from
SLEEP)
PCL
Addr: 02
H
1111 1111 0001 1xxx
1111 1111
1111 1111 0001 0uuu
1111 1111
1111 1111 0000 0uuu
TABLE 14-1 RESET CONDITIONS FOR SPECIAL
REGISTERS
1. TO and PD bits retain their last value until one of the other
reset conditions occur.
2. The CLRWDT instruction will set the TO and PD bits.
Legend : x = unknown, u = unchanged.
STATUS
Addr: 03
000u uuuu
0000 uuuu
H
1
2
Register Address
WN/A
TRIS N/A
OPTION N/A
INDF
TMR0
1
PCL
STATUS
1
FSR
PORTA
PORTB
General Purpose Register Files
00
01
02
03
04
05
06
07-1F
H
H
H
H
H
H
H
H
Power-On
Reset
xxxx xxxx uuuu uuuu uuuu uuuu
1111 1111 1111 1111 1111 1111
0011 1111 0011 1111 0011 1111
xxxx xxxx uuuu uuuu uuuu uuuu
xxxx xxxx uuuu uuuu uuuu uuuu
1111 1111 1111 1111 1111 1111
0001 1xxx 100q quuu 000q quuu
1xxx xxxx 1uuu uuuu 1uuu uuuu
---- xxxx ---- uuuu ---- uuuu
xxxx xxxx uuuu uuuu uuuu uuuu
xxxx xxxx uuuu uuuu uuuu uuuu
Wake-up
Reset
TABLE 14-2 RESET CONDITIONS FOR ALL REGISTERS
1. See Table 14-1 for reset value for specific conditions.
Legend : - = unimplemented, read as ‘0’, x = unknown, u = unc hanged.
q = see the tables in Section 17 for possible values.
RESET, PFDR,
WDT Reset
Oct. 2001 Ver. 2.0 33
Page 37

HMS77C1000A/HMS77C1001A
Power-On
V
DD
RESET
Power-Fail
Detect
WDT Time-Overflow
SRQ
Noise
Filter
RESET/VPP pin
WDT
On-Chip
RC OSC
reset
clear
Internal RESET
Timer ( 8-bit asyn.
ripple counter )
FIGURE 14-1 SIMPLIFIED BLOCK DIAGRAM OF ON-CHIP RESET CIRCUIT
14.1 Power-On Reset (POR)
The HMS77C100XA family in corporates on-chi p PowerOn Reset (POR) circuitry which provides an internal chip
reset for most power-up situations. To use this feature, the
user merely ties th e RESET
block diagram of the on-chip Power-On Reset circuit is
shown in Figure 14-1.
/VPP pin to VDD. A simplified
The Power-On Reset circuit and the Internal Reset Timer
circuit are closely related. On power-up, the reset latch is
set and the IRT is reset. The IRT timer begins counting
once it detects RESET to be high. After th e ti me -out peri od, which is typically 7 ms (oscillation stabilization time),
it will reset the reset latch and thus end the on-chip reset
signal.
Q
Internal RES ET
V
DD
RESET
INTERNAL POR
IRT TIMER-OUT
INTERNAL RESET
FIGURE 14-2 TIME-OUT SEQUENCE ON POWER-UP (RESET NOT TIED TO VDD)
T
IRT
34 Oct. 2001 Ver. 2.0
Page 38

HMS77C1000A/HMS77C1001A
V
DD
RESET
T
IRT
INTERNAL POR
IRT TIMER-OUT
INTERNAL RESET
FIGURE 14-3 TIME-OUT SEQUENCE ON POWER-UP (RESET TIOED TO VDD): FAST VDD RISE TIME
V
DD
RESET
T
IRT
INTERNAL POR
IRT TIMER-OUT
INTERNAL RESET
- When VDD rise slowly, the T
In this example, the chip will reset properly if, V1 ≥ VDDmin.
FIGURE 14-4 TIME-OUT SEQUENCE ON POWER-UP (RESET TIOED TO VDD): SLOW VDD RISE TIME
A power-up example where RESET is not tied to VD D is
shown in Figure 14-2. VDD is allowed to rise and stabilize
before bringing RESET
out of reset TIRT after RESET
high. The chip will actually come
goes high and POR, PFDR
is released.
time-out expires long before VDD has reached its final value.
IRT
when the internal reset timer times out, VDD has not
reached the VDD (min) value and the chip is, therefore, not
guaranteed to function correctly. For such situations, we
recommend that external R circuits be used to achieve
longer POR delay times (Figure 14-5).
In Figure 14-3, the on-chip Power-On Reset feature is being used (RESET
and VDD are tied together). The VDD is
stable before the internal reset timer times out and there is
no problem in getting a proper reset. However, Figure 144 depicts a problem situation where VDD rises too slowly.
The time between when the IRT senses a h igh on the RESET/VPP pin, and when the RESET/VPP pin (and VDD)
Note: When the device starts normal operation (exits the
reset condition ), device oper ating param eters (voltage, frequency, temperature, etc.) must be meet to
ensure operation. If these conditions are not met,
the device must be he ld in reset until t he operatin g
conditions are met.
actually reach their full value, is too long. In this situation,
Oct. 2001 Ver. 2.0 35
Page 39

HMS77C1000A/HMS77C1001A
The POR circuit does not produce an internal reset when
DD
declines.
V
V
V
DD
DD
D
R
R1
RESET
C
- External Power-On Reset circuit is required only if VDD
power-up is too slow. The diode D helps discharge the
capacitor quickly when VDD powers down.
- R < 40 kΩ is recommended to make sure that voltage
drop across R does not violate the device electrical specifi-
.
cation
- R1 = 100W to 1 kW will limit any current flowing into
RESET from external capacitor C in the event of RESET
pin breakdown due to Electrostatic Discharge (E SD) or
Electrical Overstress (EOS).
FIGURE 14-5 EXTERNAL POWER-ON RESET
CIRCUIT (FOR SLOW VDD POWER- UP)
14.2 Internal Reset Timer (IRT)
The Internal Reset Timer (IRT) provides a fixed 7 ms nominal time-out on reset. The IRT operates on an internal RC
oscillator. The processor is kept in RESET as long as the
IRT is active. The IRT delay allows VDD to rise above
VDD min., and for the oscillator to stabilize.
Oscillator circuits based on crystals or ceramic resonators
require a certain time after power-up to establish a stable
oscillation. The on-chip IRT keeps the device in a RESET
condition for approximately 7 ms after the voltage on the
RESET
POR released. Thus, external RC networks connected to
the RESET
for savings in cost-sensitive and/or space restricted applications. The Device Reset time delay will vary from chip
to chip due to V
The IRT will also be triggered upon a Watchdog Timer
time-out. This is particularly important for applications using the WDT to wake the HMS77C100XA from SLEEP
mode automatically.
/VPP pin has reached a logic high (VIH) level and
input are not required in most cases, allowing
, temperature, and process variation.
DD
36 Oct. 2001 Ver. 2.0
Page 40

15. WATCHDOG TIMER (WDT)
HMS77C1000A/HMS77C1001A
The Watchdog Timer (WDT) is a free running on-chip RC
oscillator which does not require any external components.
This RC oscillator is separate from the RC oscillator of the
X
pin. That means that the WDT will run even if the
IN
clock on the X
and X
IN
pins have been stopped, for ex-
OUT
ample, by execution of a SLEEP instruction. During normal operation or SLEEP, a WDT reset or wake-up reset
generates a device RESET.
The TO
bit (STATUS<4>) will be cleared upon a Watch-
dog Timer reset.
The WDT can be permanently disabled by programming
the configuration bit WDTE as a '0' (Figure 12-2). Refer to
the HMS77C100XA Programming Specifications to determine how to access the configuration word.
15.1 WDT Period
The WDT has a nominal time-out period of 14 ms, (with
no prescaler). If a longer time-out period is desired, a pres-
From TMR0 Clock Source
Watchdog Timer
caler with a division ratio of up to 1:2 56 can be assig ned to
the WDT (under software control) by writing to the OPTION register. Thus, time-out a period of a nominal 3.5
seconds can be realized. These periods vary with temperature, V
and part-to-part process variations (see DC
DD
specs).
Under worst case conditions (V
= Min., Temperature =
DD
Max., max. WDT prescaler), it may take several seconds
before a WDT time-out occurs.
15.2 WDT Programming Considerations
The CLRWDT instruction clears the WDT and the
postscaler, if assigned to the WDT, and prevents it from
timing out and generating a device RESET.
The SLEEP instruction resets the WDT and the postscaler,
if assigned to the WDT. This gives the maximum SLEEP
time before a WDT wake-up reset.
SLEEP
PSA
0
clearing WDT
on-chip
RC-OSC
enable
WDTE
SLEEP
FIGURE 15-1 WATCHDOG TIMER BLOCK DIAGRAM
Name Address Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
OPTION N/A LOWOPT PFDEN T0CS T0SE PSA PS2 PS1 PS0
TABLE 15-1 SUMMARY OF REGISTERS ASSOCIATED WITH THE WATCHDOG TIMER
8-bit asynchronous
ripple counter
clear
clearing WDT
1
MUX
PSA
Postscaler
8 - to - 1 MUX
0
WDT Time-Out
1
MUX
8
PS2:PS0
To TMR0
PSA
Power-On
Reset
0011 1111 0011 1111
RESET and
WDT Reset
Oct. 2001 Ver. 2.0 37
Page 41

HMS77C1000A/HMS77C1001A
16. Power-Down Mode (SLEEP)
For applications where power consumption is a critical
factor, device provides power down mode with Watchdog
operation. Executing of SLEEP Instruction is entrance to
SLEEP mode. In the SLEEP mode, oscillator is turn off
and system clock is disable and all functions is stop, but all
registers and RAM data is held. The wake-up sources from
SLEEP mode are external RESET
pin reset and watchdog
time-overflow reset.
16.1 SLEEP
The Power-Down mode is entered by executing a SLEEP
instruction. If enabled, the Watchdog Ti mer will be cleared
Oscillator
(XIN pin)
Internal
System Clock
Instruction
RESET
Fetch SLEEP Execute SLEEP Fetch RESET vector
~
~
~
~
~
~
but keeps running, the TO
bit (STATUS<4>) is set, the PD
bit (STATUS<3>) is cleared and the oscillator driver is
turned off. The I/O ports maintain the status they had before the SLEEP instruction was executed (driving high,
driving low, or hi-impedance).
It should be noted that a RESET gene rated by a WDT timeout does not drive the RESET
pin low.
For lowest current consumption while powered down, the
EC0 input should be at VDD or VSS and the RESET pin
must be at a logic high level
.
~
~
~
~
~
~
~
~
~
~
~
~
T
~
Internal
RESET
FIGURE 16-1 TIMING DIAGRAM OF WAKE-UP FROM SLEEP MODE DUE TO EXTERNAL RESET
Oscillator
(XIN pin)
Internal
System Clock
Instruction
WDT
Overflow
Internal
RESET
FIGURE 16-2 TIMING DIAGRAM OF WAKE-UP FROM SLEEP MODE DUE TO WATCHDOG TIME-OVERFLOW RESET
Fetch SLEEP Execute SLEEP Fetch RESET vector
~
~
~
~
~
~
~
~
~
IRT
T
IRT
~
~
PIN RESET
~
~
~
~
~
~
~
~
~
~
~
~
~
~
38 Oct. 2001 Ver. 2.0
Page 42

HMS77C1000A/HMS77C1001A
16.2 Wake-up From SLEEP
The device can wake up from SLEEP through one of the
following events:
An external reset input on RESET pin.
1.
2. A Watchdog Timer time-out reset (if WDT was enabled).
3. PFD reset
Both of these events cause a device reset. The TO
and PD
bits can be used to determine the cause of device reset. The
bit is cleared if a WDT time-out occurred (and caused
TO
wake-up). The PD
bit, which is set on power-up, is cleared
when SLEEP is invoked.
The WDT is cleared when the device wakes from sleep, re-
gardless of the wake-up source.
16.3 Minimizing Current Consumption
The SLEEP mode is designed to reduce pow er consumption. To minimize current drawn during SLEEP mode, the
user should turn-off output drivers that are sourcing or
sinking current, if it is practical.
It should be set properly that current flow through port
doesn't exist.
First conseider the setting to in put mode. Be sure that there
is no current flow after considering its relationship with
external circuit. In input mode, the pin impedance viewing
from external MCU is very high that the current doesn’t
flow.
But input voltage level should be V
or VDD. Be careful
SS
that if unspecified voltage, i.e. if uncertain voltage level
(not V
or VDD) is applied to input pin, there can be little
SS
current (max. 1mA at around 2V) flow.
Note: In the
ciated with the osc illator and the in ternal hardware
is lowered; however, the power dissipation associated with the pin interface (depending on the external
circuitry and program ) is not directly de termined by
the hardware operation of the
point should be little current flows when the input
level is stable at the power voltage level (VDD/VSS);
however, when the inp ut level becomes higher th an
the power voltage level (by approximately 0.3V), a
current begins to f low. Therefore, if cutt ing off the
output transistor at an I/O port puts the pin signal
into the high-impedan ce state, a cu rrent flow across
the ports input transistor, requiring it to fix the level
by pull-up or other means.
operation, the power dissipation asso-
SLEEP
SLEEP
feature. This
If it is not appropriate to set as an input mode, then set to
output mode considering there is no current flow. Setting
to High or Low is decided considering its relationship with
external circuit. For example, if there is external pull-up resistor then it is set to output mode, i.e. to hig h, and if there
is external pull-down register, it is set to low.
INPUT PIN
V
DD
internal
pull-up
V
DD
V
DD
O
i
V
GND
X
Weak pull-up current flows
DD
OPEN
O
FIGURE 16-3 APPLICATION EXAMPLE OF UNUSED INPUT PORT
INPUT PIN
i=0
OPEN
i
Very weak current flows
X
i=0
O
O
When port is configure as an input, input level should
be closed to 0V or 5V to avoid power consumption.
V
DD
GND
Oct. 2001 Ver. 2.0 39
Page 43

HMS77C1000A/HMS77C1001A
OUTPUT PIN
ON
OFF
X
ON
OFF
OPEN
O
i
V
GND
ON
OFF
DD
OUTPUT PIN
O
In the left case, much current flows from port to GND.
FIGURE 16-4 APPLICATION EXAMPLE OF UNUSED OUTPUT PORT
V
DD
GND
L
OFF
i=0
ON
O
ON
OFF
i
X
In the left case, Tr. base current flows from port to GND.
To avoid power consumption, there should be low output
to the port.
GND
V
DD
L
40 Oct. 2001 Ver. 2.0
Page 44
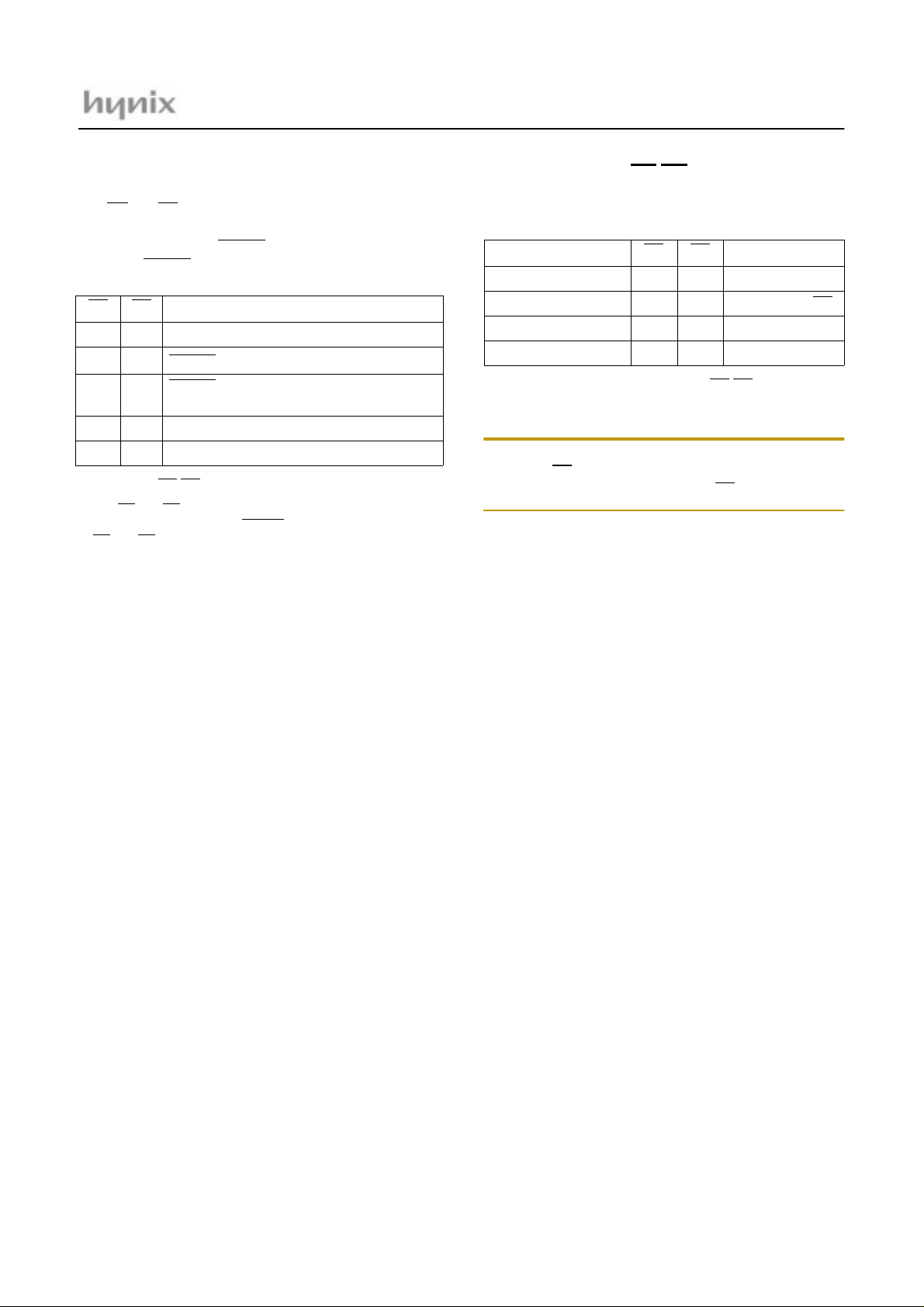
HMS77C1000A/HMS77C1001A
17. TIME-OUT SEQUENCE AND POWER DOWN STATUS BITS (TO/PD)
The TO and PD bits in the STATUS register can be tested
to determine if a RESET condition has been caused by a
power-up condition, a RESET
reset, or a RESET
TO PD RESET was caused by
1 1 Power-up(POR)
uu
10
0 1 WDT reset (normal operation)
0 0 WDT wake-up reset (from SLEEP)
TABLE 17-1 TO
1. The TO and PD bits maintain their status (u) until a reset
occurs. A low-pulse on the RESET
and PD status bits.
TO
or WDT wake-up reset.
RESET
RESET Wake-up or PFD reset
(from SLEEP)
or PFD reset (normal operation)
/PD STATUS AFTER RESET
or Watchdog Timer (WDT)
1
input does not change the
These STATUS bits are only affected by events listed in
Table 17-2.
Event TO PD Remarks
Power-up 1 1
WDT Time-out 0 u No effect on PD
SLEEP instruction 1 0
CLRWDT instruction 1 1
TABLE 17-2 EVENTS AFFECTING TO
BITS
Note: A WDT time-out will occur regardless of the status of
the TO bit. A SLEEP instruction will be executed,
regardless of th e status of the PD bit.
/PD STATUS
Table 14-1 lists the reset conditions for the special function
registers, while Table 14-2 lists the reset conditions for all
the registers.
Oct. 2001 Ver. 2.0 41
Page 45

HMS77C1000A/HMS77C1001A
18. POWER FAIL DETECTION PROCESSOR
HMS77C100XA has an on-c hip power fail detection circuitry to immunize against power noise.
OPTION
Register
FIGURE 18-1 POWER FAIL DETECTION PROCESSOR
LOWOPT PFDEN T0CS T0SE PSA PS2 PS1 PS0
bit7 6 bit054321
bit 7 LOWOPT: Power-fail detection level select bit.
1 = Lowered detection level (typ. 1.8V @ 5V)
0 = Normal detection level (typ. 2.7V @ 5V)
bit 6 PFDEN: Power-fail detection enable bit
1 = Enable power-fail detection
0 = Disable power-fail detection
The bit6(PFDEN) of OPTION register activates the PFD
Circuit, and bit7(LOWopt) lowers the detection level of
the Power Noise. The normal detection level is typically
2.7V and the lowered detection level is typically 1.8V. Fig ure 18-2 shows a Power Fail Detection Situations where
the detection level is selected by LOWOPT Bit.
If VDD falls below a level for longer 100ns, the power fail
detection processor may reset MCU and preserve the device from the malfunction due to Power Noise.
Note: The PFD circuit is not implemented on the in circuit
emulator, us er can not exper iment with it. The re
fore, after final development user program, this
function may be experimented on OTP
PFDEN = 1
LOWOPT = 0
PFDEN = 1
LOWOPT = 1
≤ V
V
DD
DR
PFDEN = 1
LOWOPT = 0/1
V
DD
PFDR
Internal
RESET
V
DD
PFDR
Internal
RESET
V
DD
PFDR
Internal
RESET
POR
When V
≥ 100nS
T
NVDD
T
IRT
≥ 100nS
T
NVDD
T
IRT
T
IRT
falls below approximately 1.5V level, Power-On Reset may occur.
DD
VDR=2.7V
VDR=1.8V
VDR=2.7 or 1.8V
FIGURE 18-2 POWER FAIL DETECTION SITUATIONS
42 Oct. 2001 Ver. 2.0
 Loading...
Loading...