

HSD ES915, ES919 NL, ES919 L NC, ES919 NC, ES919 L NL Installation, Operation And Maintenance Manual
Page 1

Installation, Operation and Maintenance Manual
5801H0017
Revision 02
ELECTRO-SPINDLES
for automatic tool changing
HSD S.p.a.
TECHNOLOGICAL EQUIPMENT FOR AUTOMATION
Via della Meccanica 16
Loc. Chiusa di Ginestreto
61100 PESARO (ITALIA)
Tel. (+39)0721.439.612
Fax(+39)0721.441.606
E-mail hsd.sales@hsd.it
Web: www.hsd.it
ES915
ES919 NC
WHITH BELT DRIVEN "C" AXIS UNIT
ES919 NC
ES919 NL
ES919 L NC
ES919 L NL
Page 2

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 2/98
TABLE OF CONTENTS
§ 1 DOCUMENTS DELIVERED WITH THE ELECTRO-SPINDLE......................................... 5
§ 2 DOCUMENT INFORMATION ........................................................................................... 5
§ 3 CUSTOMER ASSISTANCE SERVICE............................................................................. 5
§ 4 TERMS OF WARRANTY.................................................................................................. 6
§ 5 WARNINGS AND SAFETY PRECAUTIONS.................................................................... 7
5.1 Distribution of this manual .................................................................................................. 7
5.2 General safety symbols ....................................................................................................... 7
5.3 Risks associated with the electro-spindle.......................................................................... 8
5.4 Risks associated with improper use and handling............................................................ 8
5.5 Risks specific to maintenance............................................................................................. 9
§ 6 GENERAL INFORMATION............................................................................................... 9
6.1 Proper use of the product.................................................................................................... 9
6.2 Identification of manufacturer and part ............................................................................ 10
6.3 Description of the main parts of the electro-spindle........................................................ 11
6.4 Glossary.............................................................................................................................. 12
§ 7 TECHNICAL SPECIFICATIONS..................................................................................... 13
7.1 Available models................................................................................................................ 13
7.1.1 ES915 / ES915 L ........................................................................................................ 13
7.1.2 ES919 / ES919 L ........................................................................................................ 13
7.2 Technical specifications of ES915 .................................................................................... 14
7.2.1 Overall dimensions of ES915........................................................................................ 14
7.2.2 Specifications and performance of ES915 2 Pole, 3.8 kW units.................................... 15
7.2.3 Specifications and performance of ES915 4 Pole, 5 kW units....................................... 16
7.3 Technical specifications of ES915 L................................................................................. 17
7.3.1 Overall dimensions of ES915 L HSK F63 Long Nose.................................................. 17
7.3.2 Specifications and performance of ES915 L 4 Pole, 7.5 kW units ................................. 18
7.4 Technical specifications of ES919 .................................................................................... 19
7.4.1 Overall dimensions of ES919 ISO30 Short Nose .......................................................... 19
7.4.2 Overall dimensions of ES919 ISO30 Long Nose........................................................... 20
7.4.3 Overall dimensions of ES919 HSK F63 Short Nose...................................................... 21
7.4.4 Overall dimensions of ES919 HSK F63 Long Nose....................................................... 22
7.4.5 Specifications and performance of ES919 2 Pole, 7 kW units....................................... 23
7.4.6 Specifications and performance of ES919 2 Pole, 8 kW units....................................... 24
7.4.7 Specifications and performance of ES919 4 Pole, 5.5 kW units.................................... 25
7.4.8 Specifications and performance of ES919 4 Pole, 7.5 kW units.................................... 26
7.5 Technical specifications of ES919 L................................................................................. 27
7.5.1 Overall dimensions of ES919 L ISO30 Short Nose ...................................................... 27
7.5.2 Overall dimensions of ES919 L ISO30 Long Nose....................................................... 28
7.5.3 Overall dimensions of ES919 L HSK F63 Short Nose.................................................. 29
7.5.4 Overall dimensions of ES919 L HSK F63 Long Nose ................................................... 30
7.5.5 Specifications and performance of ES919 L 4 Pole, 12 kW units ................................. 31
7.6 Technical specifications of Belt driven C axis unit.......................................................... 32
7.6.1 Overall dimensions of ES919 ISO30 Short Nose with belt driven C Axis unit................ 32
7.6.2 Overall dimensions of gear units................................................................................... 33
7.6.3 Technical specifications for belt driven C axis unit ........................................................ 34
7.7 Technical specifications of components.......................................................................... 35
7.7.1 Bearings........................................................................................................................ 35
7.7.2 Tool holder locking and release device ......................................................................... 35
7.7.3 Automatic cleaning of the tool holder and internal pressurization.................................. 36
7.7.4 Proximity sensors.......................................................................................................... 36
Page 3
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 3/98
7.7.5 Tool release button....................................................................................................... 36
7.7.6 Thermal switch.............................................................................................................. 37
7.7.7 Cooling fan.................................................................................................................... 37
§ 8 TRANSPORT AND MOVING.......................................................................................... 38
8.1 Storage................................................................................................................................ 38
8.2 Lifting the electro-spindle in its crate............................................................................... 38
§ 9 INSTALLATION.............................................................................................................. 40
9.1 First Check .......................................................................................................................... 40
9.2 Preparation of the equipment required for installation on site ....................................... 40
9.3 Mechanical installation ...................................................................................................... 40
9.3.1 The supporting surface ................................................................................................. 40
9.3.2 Positioning the electro-spindle ...................................................................................... 40
9.3.3 Mechanical fixing of the electro-spindle ......................................................................... 41
9.3.4 Threaded service holes................................................................................................. 42
9.4 Compressed air connections............................................................................................. 43
9.4.1 Compressed air unions................................................................................................. 43
9.4.2 Functional diagram of electro-spindle compressed air connections............................... 44
9.5 Cooling circuit .................................................................................................................... 45
9.5.1 Cooler specifications..................................................................................................... 45
9.6 Electrical connections........................................................................................................ 46
9.6.1 Connectors ................................................................................................................... 46
9.6.2 Pin layout of fixed signals connector - ISO 30 version................................................... 46
9.6.3 Pin layout of fixed signals connector - HSK F63 version ............................................... 47
9.6.4 Pin layout of fixed power connector............................................................................... 47
9.6.5 Tool holder release system electrical wiring diagram for electro-spindles not controlled by
CNC.............................................................................................................................. 48
9.6.6 Configurable power terminals (optional)........................................................................ 49
§ 10 GENERAL CHECKS AFTER INSTALLATION AND DURING START-UP.................. 50
10.1 Checking the electro-spindle before start-up................................................................. 50
10.2 Checking the electro-spindle on first start-up................................................................ 51
§ 11 OPERATING THE ELECTRO-SPINDLE...................................................................... 52
11.1 Climatic conditions .......................................................................................................... 52
11.2 Running in......................................................................................................................... 52
11.3 Warming up....................................................................................................................... 52
11.4 Selecting the tool holder and tool ................................................................................... 53
11.4.1 ISO 30 tool holders ..................................................................................................... 53
11.4.2 HSK F63 tool holders.................................................................................................. 54
11.4.3 General safety precautions for tool holders................................................................. 55
11.4.4 Choosing tools............................................................................................................ 56
11.5 Speed limitations.............................................................................................................. 57
11.5.1 Content of graphs ....................................................................................................... 57
11.5.2 Reading the graphs..................................................................................................... 57
11.5.3 ES915 ISO30............................................................................................................. 58
11.5.4 ES919 ISO30 Short Nose , ES919 L ISO30 Short Nose ...................................... 59
11.5.5 ES919 ISO30 Long Nose , ES919 L ISO30 Long Nose........................................ 60
11.5.6 ES919 HSK F63 Short Nose , ES919 L HSK F63 Short Nose.............................. 61
11.5.7 ES919 HSK F63 Long Nose , ES919 L HSK F63 Long Nose............................... 62
11.6 Sensor functioning........................................................................................................... 63
11.6.1 ISO 30 versions .......................................................................................................... 63
11.6.2 HSK F63 versions....................................................................................................... 64
11.7 Thermal switch ................................................................................................................. 65
§ 12 MAINTENANCE............................................................................................................ 66
12.1 Scheduled maintenance................................................................................................... 67
12.1.1 Checking the cleanliness of the tool holder cone and of the spindle shaft tool housing67
Page 4

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 4/98
12.1.2 Cleaning the tool holder cone...................................................................................... 69
12.1.3 Protecting the spindle shaft's conical housing ............................................................. 69
12.1.4 Lubricating HSK fingers .............................................................................................. 70
12.1.5 Bearings...................................................................................................................... 70
12.2 Replacing parts................................................................................................................. 71
12.2.1 Changing the spindle shaft kit ..................................................................................... 72
12.2.2 Replacing the cooling fan............................................................................................ 74
12.2.3 Replacing the tool change push-button....................................................................... 74
12.2.4 Replacing sensors S1, S2, S3 and S4......................................................................... 75
12.2.4.1 Wiring of sensors in ISO 30 versions...............................................................................75
12.2.4.2 Wiring of sensors in HSK versions...................................................................................75
12.2.4.3 Accessing the sensors.....................................................................................................76
12.2.4.4 Location of sensors..........................................................................................................76
12.2.4.5 The sensor assembly.......................................................................................................77
12.2.4.6 Replacing a sensor assembly..........................................................................................77
12.2.4.7 Calibrating sensors S1, S2, and S3 on ISO 30 electro-spindles .....................................78
12.2.4.8 Calibrating sensors S1, S2, S3 and S4 on HSK F63 electro-spindles ............................78
12.2.4.8.1 Procedure for S1..............................................................................................78
12.2.4.8.2 Procedure for S2..............................................................................................78
12.2.4.8.3 Procedure for S3..............................................................................................79
12.2.4.8.4 Procedure for S4..............................................................................................79
12.2.4.9 Gauge and shim kit for calibrating S1 and S4 sensors on HSK F63 electro-spindles
(HSD code 3811H0110).......................................................................................................80
12.2.4.10 Calibrating sensors S1 and S4 on F63 HSK electro-spindles using the 3811H0110 kit80
12.2.4.10.1 Procedure for S1............................................................................................81
12.2.4.10.2 Procedure for S4............................................................................................81
12.2.5 Replacing the cylinder assembly................................................................................. 82
§ 13 ACCESSORIES AND OPTIONS .................................................................................. 85
13.1 "Spindle shaft stopped" sensor S3................................................................................. 85
13.2 Bearing temperature sensor............................................................................................ 85
13.2.1 Installing the bearing temperature sensor ................................................................... 86
13.2.2 Characteristic curve of the temperature sensor referred to 1 mA............................... 86
13.3 “C” axis unit...................................................................................................................... 87
13.3.1 Belt driven “C” axis unit............................................................................................... 87
13.3.2 Gear driven “C” axis unit ............................................................................................. 87
13.3.3 SC sensor for the belt driven “C” axis unit................................................................... 88
13.3.4 Replacing and calibrating the SC sensor in belt drive versions.................................... 89
13.4 Forced air cooling ............................................................................................................ 91
13.4.1 Installing the forced air cooling kit ............................................................................... 91
§ 14 TROUBLE SHOOTING................................................................................................. 92
§ 15 SPARE PARTS LIST.................................................................................................... 96
§ 16 DISPOSING OF THE ELECTRO-SPINDLE.................................................................. 97
Page 5

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 5/98
§ 1 DOCUMENTS DELIVERED WITH THE ELECTRO-SPINDLE
The following documents are delivered with the electro-spindle:
• this manual containing the safety warnings and instructions for installation, operation and
maintenance
• a series of other documents including:
1. The Manufacturer's Declaration of conformity to attachment IIB of Directive 98/37/CE
2. Attachments containing information on special parts of the electro-spindle. All such
attachments must be consulted in conjunction with the main document to which they refer in
order to avoid missing important information.
Make sure that all the above documents are delivered with the electrospindle. If any are missing, ask HSD S.p.a. for a replacement copy.
§ 2 DOCUMENT INFORMATION
This manual has been written by the Electro-spindle department of the Technical Office at HSD
S.p.a. for use by all the installers, operators and service engineers who work with the electrospindle.
ISSUED BY CODE REVISION APPROVED BY
HSD S.p.a.
Via della Meccanica 16
Loc. Chiusa di Ginestreto
61100 PESARO (ITALIA)
5801H0017 02 UTE 005 / 03
Record of updates
Revision Added § Deleted § Changed §
00 First issue First issue First issue
01 General revision General revision General revision
02 ES 915 L HSK F63 Long Nose ---- Overall dimensions of ES 919 L HSK F63 Long Nose
This manual is delivered as an essential part of the electro-spindle and at the time of revision was
the most up to date documentation on the product.
§ 3 CUSTOMER ASSISTANCE SERVICE
HSD HSD HSD
Via della Meccanica 16
61100 PESARO (ITALIA)
Loc. Chiusa di Ginestreto
Tel. (+39)0721.439.638
Fax (+39)0721.441.606
E-mail hsd.service@hsd.it
Web www.hsd-hitec.com
HSD Deutschland GmbH
Brückenstrasse 2
D-73333 Gingen
Tel. +49(0)7162 / 9323436
Fax +49(0)7162 / 9323439
HSD USA Inc.
3764 SW, 30th Avenue
Hollywood, Florida 33312 USA
Phone no. (+1) 954 587 1991
Fax (+1) 954 587 8338
E-mail service@hsdusa.com
Web www.hsdusa.com
Page 6

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 6/98
§ 4 TERMS OF WARRANTY
HSD S.p.a. guarantees that this electro-spindle has been QC passed in testing in the factory. HSD
S.p.a. accepts responsibility only for defects in electrical and mechanical parts. The warranty does
not cover defects caused by the normal use of parts subject to continuous or rapid wear (e.g.
seals, belts, bearings, etc.). In particular HSD S.p.a. offers no guarantee as to the duration of
bearings, since bearing wear depends on various factors including: tool balancing precision, type
of machining operation, impacts and/or mechanical stress in excess of the manufacturer’s declared
limits.
HSD S.p.a. declines all responsibility for non-compliance of the electro-spindle caused by failure to
follow the precautions and instructions given in this manual or by improper use or handling of the
electro-spindle. The customer has the right to replacement of all parts shown to be defective,
unless the said defects are caused by unauthorized tampering, including the fitting of non-original
HSD spare parts and/or the replacement of parts not described or authorized in this manual unless
authorized beforehand and in writing by HSD S.p.A..
In no case shall HSD S.p.A. or its suppliers accept any responsibility for damage (including
damage to the unit, damage incurred for lost production and income, down-time in manufacturing,
loss of information or other economic losses) deriving from the use of HSD products, even if HSD
has been advised of such risks in advance.
The warranty becomes automatically null and void if the customer fails to notify HSD S.p.A. in
writing of any faults found in the electro-spindle within 15 days of their occurrence. The warranty
likewise becomes null and void if the customer fails to permit the seller to perform all necessary
checks and tests, and if, when the seller requests the return of a defective part, the customer fails
to do so within two weeks of the request.
Dimensioned drawings and photographs are provided only for information purposes and to
facilitate understanding of text.
HSD S.p.A. has a policy of constant development and improvement, and reserves the right to
make functional and stylistic modifications to its products, to change the design of any functional or
accessory part, and to suspend manufacturing and supply without notice and without obligation to
third parties. Furthermore, HSD S.p.A. reserves the right to make any structural or functional
change to the units, and to change the supply of spare parts and accessories without any prior
notice.
Page 7
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 7/98
§ 5 WARNINGS AND SAFETY PRECAUTIONS
5.1 DISTRIBUTION OF THIS MANUAL
This manual contains important instructions and precautions, and must accompany the electrospindle at all times since it is essential for the safe operation of the electro-spindle.
Keep this manual safe, and ensure that all persons involved with the electro-spindle know of it and
have access to it.
The safety precautions contained herein are designed to ensure the safety of all persons
exposed to the residual risks associated with the electro-spindle.
The instructions contained herein provide information necessary for the correct operation of the
electro-spindle, as required by the manufacturer.
If any information given in this manual is found to be in conflict with applicable safety regulations,
contact HSD S.p.A. on +39 0721 439612 to request the necessary corrections and/or adaptations.
Make sure that you read and fully understand all the documentation supplied with the electrospindle to avoid incorrect operation of the unit and unnecessary risks of personal injury.
Keep this manual in a suitable place near the machine, where it will always be readily available to
operators for consultation.
IMPORTANT: The information given in this manual is essential to
ensure that the electro-spindle is installed and used safely and
correctly.
5.2 GENERAL SAFETY SYMBOLS
In this manual, important instructions or precautions are marked with the following symbols:
WARNING: Identifies situations that could lead to
personal injury.
WARNING: Live electrical parts.
i
IMPORTANT: Identifies particulary important
information.
Page 8

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 8/98
5.3 RISKS ASSOCIATED WITH THE ELECTRO-SPINDLE
HSD does not and can not know how end users will install their electro-spindles. The
installer or customer must therefore perform risk assessment specific to each installation
and application.
It is also the responsibility of the installer to ensure that adequate guards are provided to prevent
accidental contact with moving parts.
The installer and the operator must also bear in mind other types of risk, particulary those
associated with foreign bodies, explosive, inflammable, toxic or high temperature gasses.
Risks associated with maintenance operations must also be guarded against. Maintenance must
be performed in conditions of maximum safety, and only with the electro-spindle fully stationary
and switched off.
Once the electro-spindle has been installed in the way decided upon by the installer and/or
customer, the machine becomes a “finished machine” as defined for the purposes of the Machinery
Directive. Overall risk assessment must therefore be performed on the finished machine and a
declaration of conformity produced in compliance with Appendix IIA of the 98/37/CE Machinery
Directive.
5.4 RISKS ASSOCIATED WITH IMPROPER USE AND HANDLING
• Never impede the functioning of, remove, modify or in any way interfere with any safety device,
guard, or control of individual parts or of the electro-spindle as a whole.
• Never place your hands, arms, or any other part of your body near moving machinery.
• Do not use the electro-spindle in atmospheres or environments where there is a risk of
explosion.
• Unless you are duly authorized, never attempt to repair faults or electro-spindle malfunctions
and never interfere in any way with the electro-spindle’s operation or installation.
• On completion of servicing work for which guards, covers, or any other protections have been
removed, always make sure that they have been correctly and securely replaced and are fully
functional before re-starting the electro-spindle.
• Keep all protection and safety devices in perfect working order. Also make sure that all warning
labels and symbols are correctly positioned and perfectly legible.
• When troubleshooting the electro-spindle always adopt all the safety precautions listed in this
manual for the purpose of preventing injury or damage to persons and things.
• After adjusting any mechanical part, make sure that you fully tighten all screws, bolts or ring
nuts you may have slackened or removed.
• Before you start the electro-spindle, make sure that all the safety devices are installed and
perfectly functional. Do not start the electro-spindle if this is not the case, but immediately
inform the person responsible for machine safety or your direct superior.
• Make sure that you have and use all the personal protective equipment (PPE) required by law.
Do not wear loose or hanging clothing (ties, wide sleeves, etc.).
• Never use tool holders of different types to those specified in this manual. To do so could
damage the tool holder cone or lead to unsafe tool holder locking.
Page 9
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 __________________________________________________________ 9/98
5.5 RISKS SPECIFIC TO MAINTENANCE
• Take great care not to cut yourself on the tools while servicing or cleaning the electro-spindle.
Ideally, tools should be removed prior to these operations.
• Rotating parts may continue to spin under the effect of inertia even when the electro-spindle
has been switched off. Make absolutely sure that the spindle is not spinning before accessing
it.
• Perform all scheduled maintenance as described in this manual. Failure to do so may lead to
mechanical failures and breakage through wear or inadequate maintenance.
WARNING: NEVER:
• Start any maintenance before making absolutely sure that the tool in the
electro-spindle is completely stationary.
• Start any maintenance on the electro-spindle before disconnecting it from
the main power supply.
• Attempt to clean the electro-spindle while it is operating.
§ 6 GENERAL INFORMATION
6.1 PROPER USE OF THE PRODUCT
Electro-spindles are used as parts of machines.
The machine structure to which the electro-spindle is secured must be rigid and strong enough to
support the weight of the electro-spindle and withstand the machining operations to be performed.
The electro-spindles described in this manual are designed for milling and drilling wood, plastic,
aluminium and fiber-board.
They are all designed for operation in an S1 duty type. Technical specifications vary as detailed in
section § 7.
All ES919 and ES915 variants can be fitted with a gear driven C axis unit as an optional.
Model ES919 ISO30 Short Nose (7 kW or 8 kW version, 2 poles) is also available with a belt driven
C axis unit. (C axis belt drive is not available as an option for retro-fitting.)
Some models have their power terminals configured in either star or delta configuration.
A spindle shaft kit is available for rapid changes of the complete spindle shaft with bearing
assembly on all models except models with belt driven C axis units.
To prevent damage to the precision bearings, all electro-spindles are fitted with a
mechanical reaction system that counteracts the axial force that the piston applies to the
spindle shaft during tool change operations.
Page 10
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 10/98
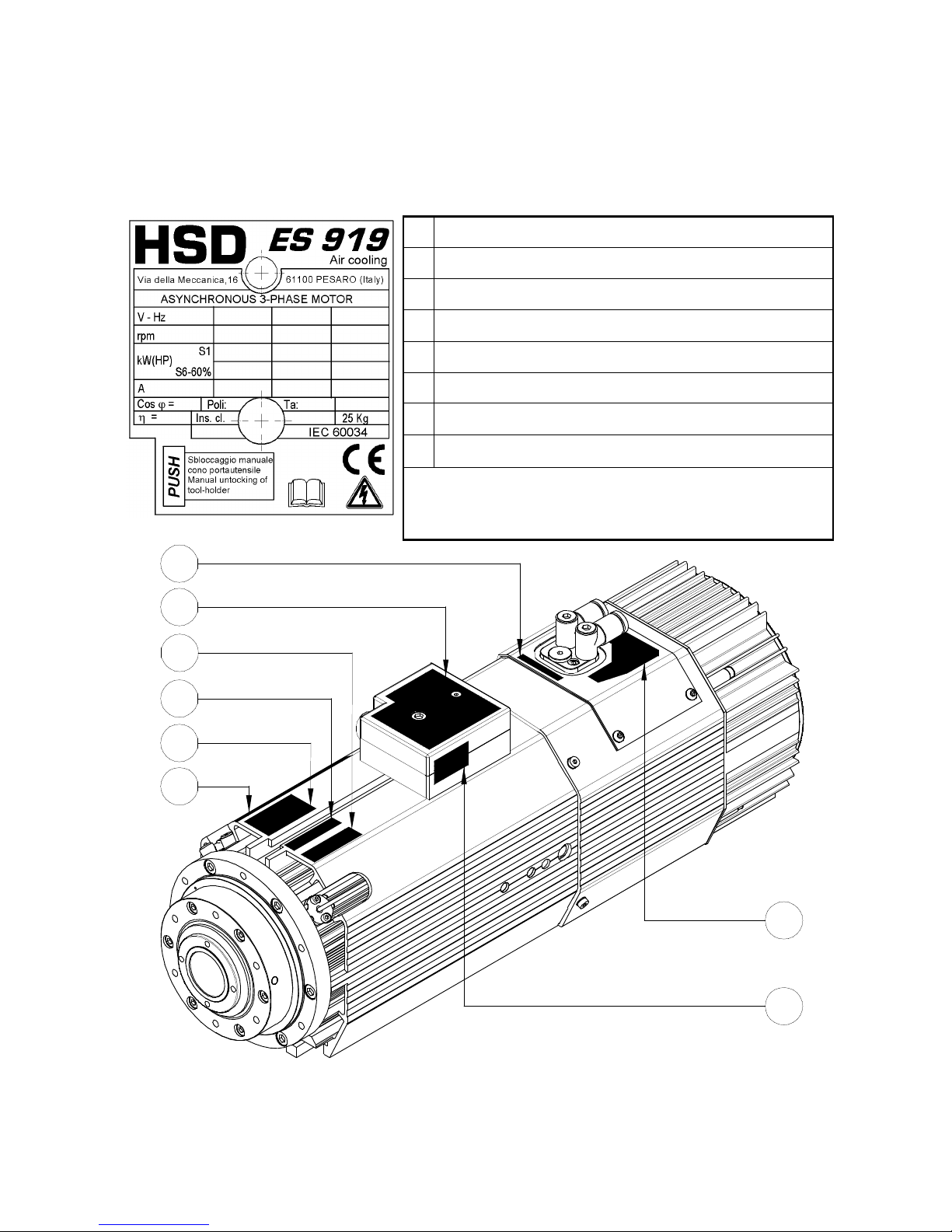
6.2 IDENTIFICATION OF MANUFACTURER AND PART
The data label shown below is the only form of electro-spindle identification recognised by the
manufacturer, and must be kept in its original legible condition. Figure 6.1 shows the electrospindle data label, while Figure 6.2 shows its location on the electro-spindle (Position 2).
1
Commercial part name and HSD code
2
CE label
3
“CERAMIC” (models with ceramic bearings only)
4
Serial number
5
Description of the tool holder cone
6
Commercial name of electro-spindle
7
Description of air inlets
8
HSD code for stator group
Figure 6.1 The CE label
NOTE:
Some of the symbols shown here may not be
present on your particular electro-spindle.
6
5
4
3
7
8
2
1
Figure 6.2 Location of the CE label and other symbols on the electro-spindle
Page 11
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 11/98
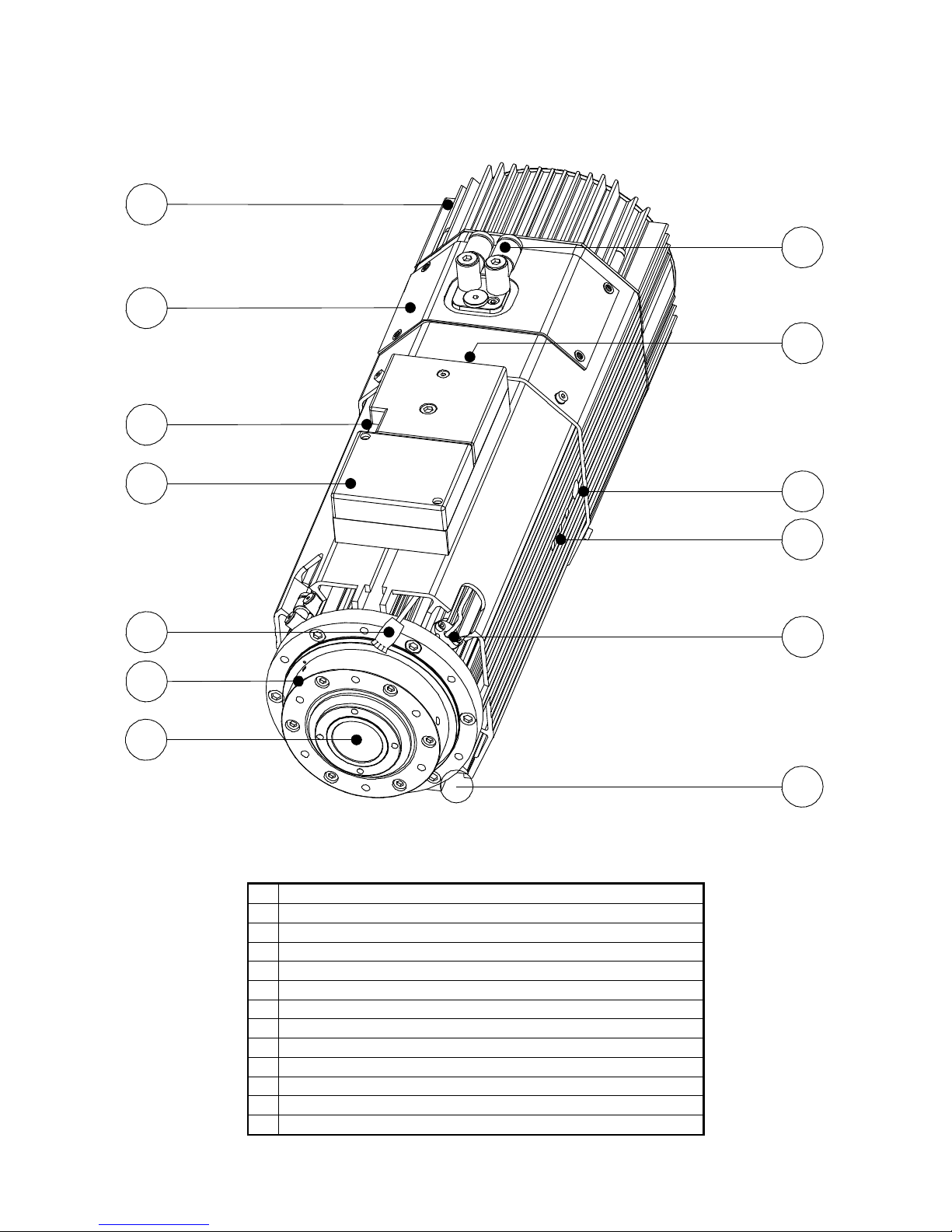
6.3 DESCRIPTION OF THE MAIN PARTS OF THE ELECTRO-SPINDLE
1
2
3
4
5
6
7
8
10
11
12
13
9
Figure 6.3 General view of the electro-spindle
1
Cooling fan
2
Sensor compartment
3
Manual tool holder release button
4
Configurable terminal block (optional)
5
C axis sensor connector (optional C axis)
6
Spindle nose
7
Spindle shaft
8
Compressed air connectors
9
Electrical terminals
10
Exhaust air silencer (one on each side)
11
Threaded service holes (see section 9.3.4 )
12
Temperature sensor for front bearings (optional)
13
“T” slots for anchoring to support
Page 12
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 12/98
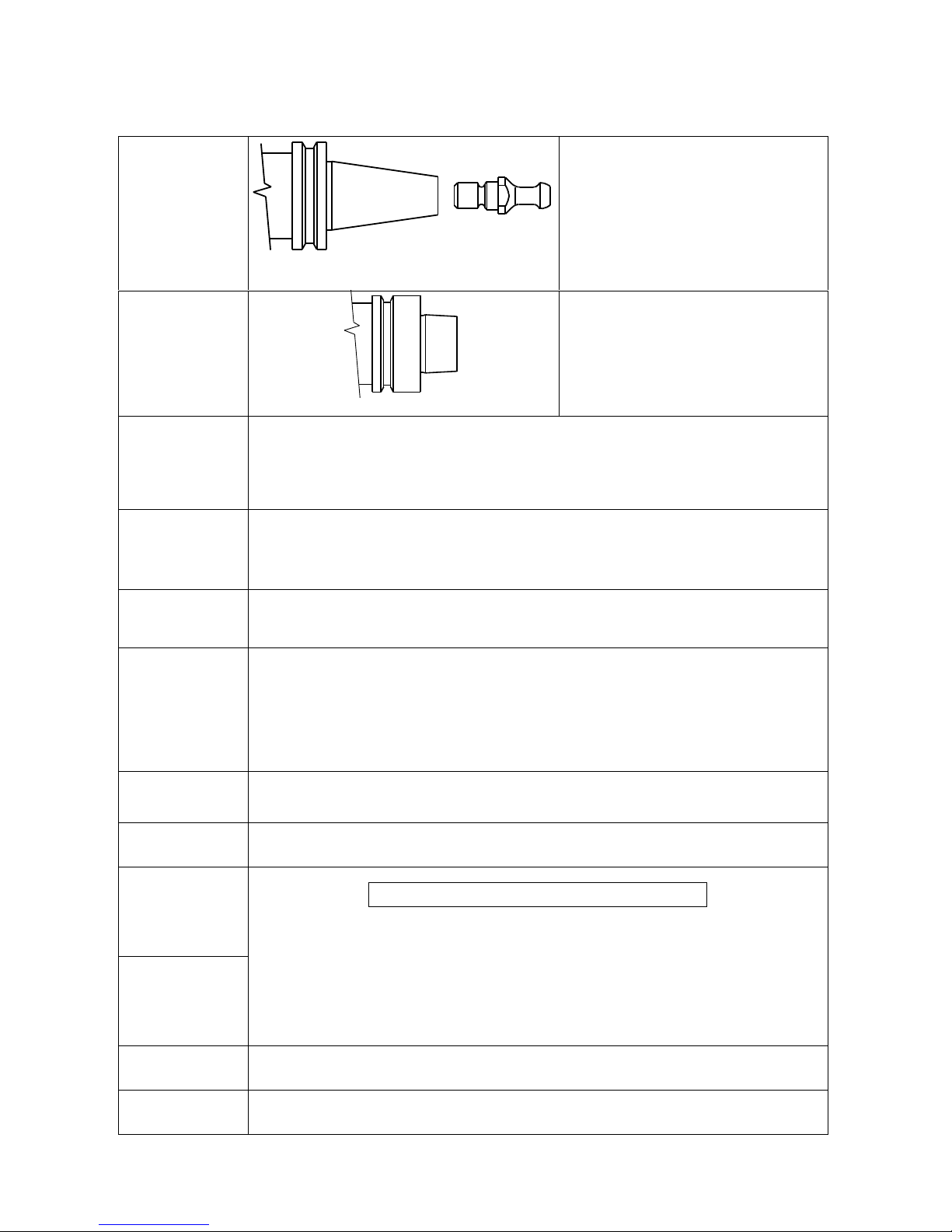
6.4 GLOSSARY
ISO 30
ISO30, DIN69871 CONE
HSD PULL STUD
0804H0009
The locking system for the tool holder
cone complies with DIN standard 69871.
The electro-spindle has a label showing
the type of tool holder mechanism (ISO
or HSK), bearing a symbol like that
shown at left.
HSK
DIN69893 HSK F63 CONE
The locking system for the tool holder
cone complies with DIN standard 69893.
The electro-spindle has a label showing
the type of tool holder mechanism (ISO
or HSK), bearing a symbol like that
shown at left.
Dynamic
balancing
class
The degree of balancing of a rotating object according to ISO standard 1940/1, defined
as the G rating.
Low G values mean better balancing. G = 0.4 specifies maximum balancing precision.
G assumes discrete values that increment in multiples of 2.5 (G=0.4 , G=1 , G=2.5 ,
etc.).
Scheduled
maintenance
Actions required to maintain the electro-spindle in the original condition, as specified by
HSD S.p.a..
Maintenance can include scheduled adjustments, repairs and part replacements.
Duty type S1
Functioning at constant load for enough time to bring the electro-spindle to a state of
thermal equilibrium.
Abbreviated as S1.
Duty type S6
A sequence of identical operating cycles, each comprising a period of functioning at
constant load and a period of functioning at no load but at the same rotation speed,
without any intermediate rest times.
Abbreviated as S6 followed by the percentage ratio between the period of functioning
under load and the duration of the cycle.
Example: S6 40%.
(40% functioning under load, 60% no load rotation).
Rated voltage
The maximum voltage permissible for electrical power to the electro-spindle.
Rated
frequency
The minimum frequency at which power at rated voltage must be delivered.
Torque
Power
..Torque (Nm) = [ 60 · power (W) ] : [ 2 · Π · rpm]..
Precise definition of torque and power goes beyond the scope of this manual.
Nevertheless, torque can be adequately understood as being related to the force with
which the tool bites into the work piece. (For the same torque, force increases as tool
diameter decreases.) Power on the other hand is proportional to torque and rotation
speed. Power limits the maximum machining speed (within the limits dictated by tool
performance, the characteristics of the material being machined, and the type of
machining involved).
Ratings
The set of rated values declared at rated frequency.
Coolants
Liquids or gases (including air), used as the medium for transferring heat from the
spindle into the environment.
Page 13
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 13/98
§ 7 TECHNICAL SPECIFICATIONS
7.1 AVAILABLE MODELS
7.1.1 ES915 / ES915 L
ISO 30 HSK F63 RATED VOLTAGE
SHORT
NOSE
LONG
NOSE
SHORT
NOSE
LONG
NOSE
380 V
CONFIGURABLE
380 V / 220 V
3.8 kW
2 poles
air cooling
¦ ¦ ¦
5 kW
4 poles
air cooling
¦ ¦
7.5 kW
4 poles
liquid cooling
¦ ¦
7.1.2 ES919 / ES919 L
ISO 30 HSK F63 RATED VOLTAGE
SHORT
NOSE
LONG
NOSE
SHORT
NOSE
LONG
NOSE
380 V
CONFIGURABLE
380 V / 220 V
7 kW
2 poles
air cooling
¦ ¦ ¦ ¦
7 kW
2 poles
air cooling
whith belt-driven
"C Axis" unit
¦ ¦ ¦
8 kW
2 poles
air cooling
¦ ¦ ¦ ¦
8 kW
2 poles
air cooling
whith belt-driven
"C Axis" unit
¦ ¦ ¦
5.5 kW
4 poles
air cooling
¦ ¦ ¦
7.5 kW
4 poles
air cooling
¦ ¦ ¦ ¦ ¦
12 kW
4 poles
liquid cooling
¦ ¦ ¦ ¦ ¦
Page 14
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 14/98
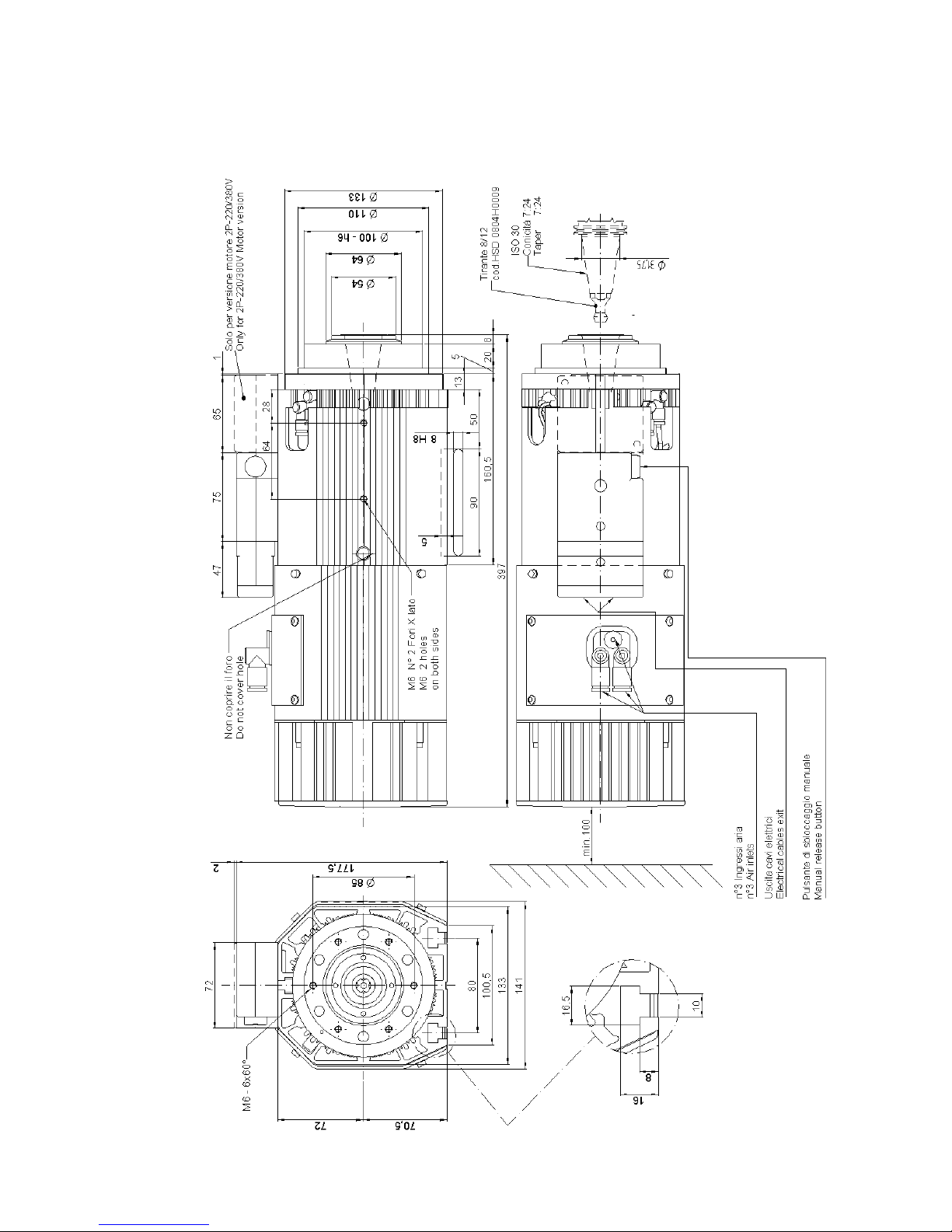
7.2 TECHNICAL SPECIFICATIONS OF ES915
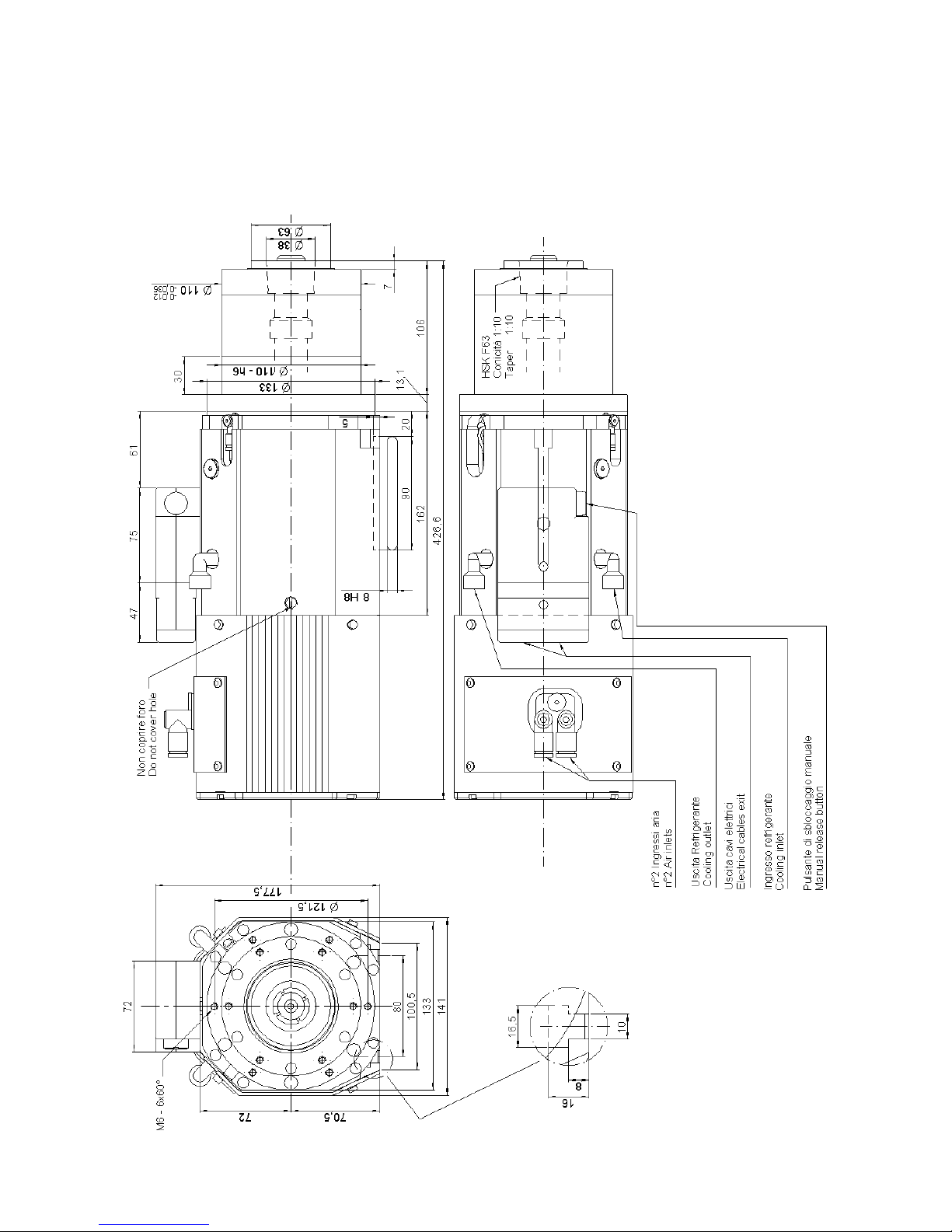
7.2.1 Overall dimensions of ES915
Page 15
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 15/98
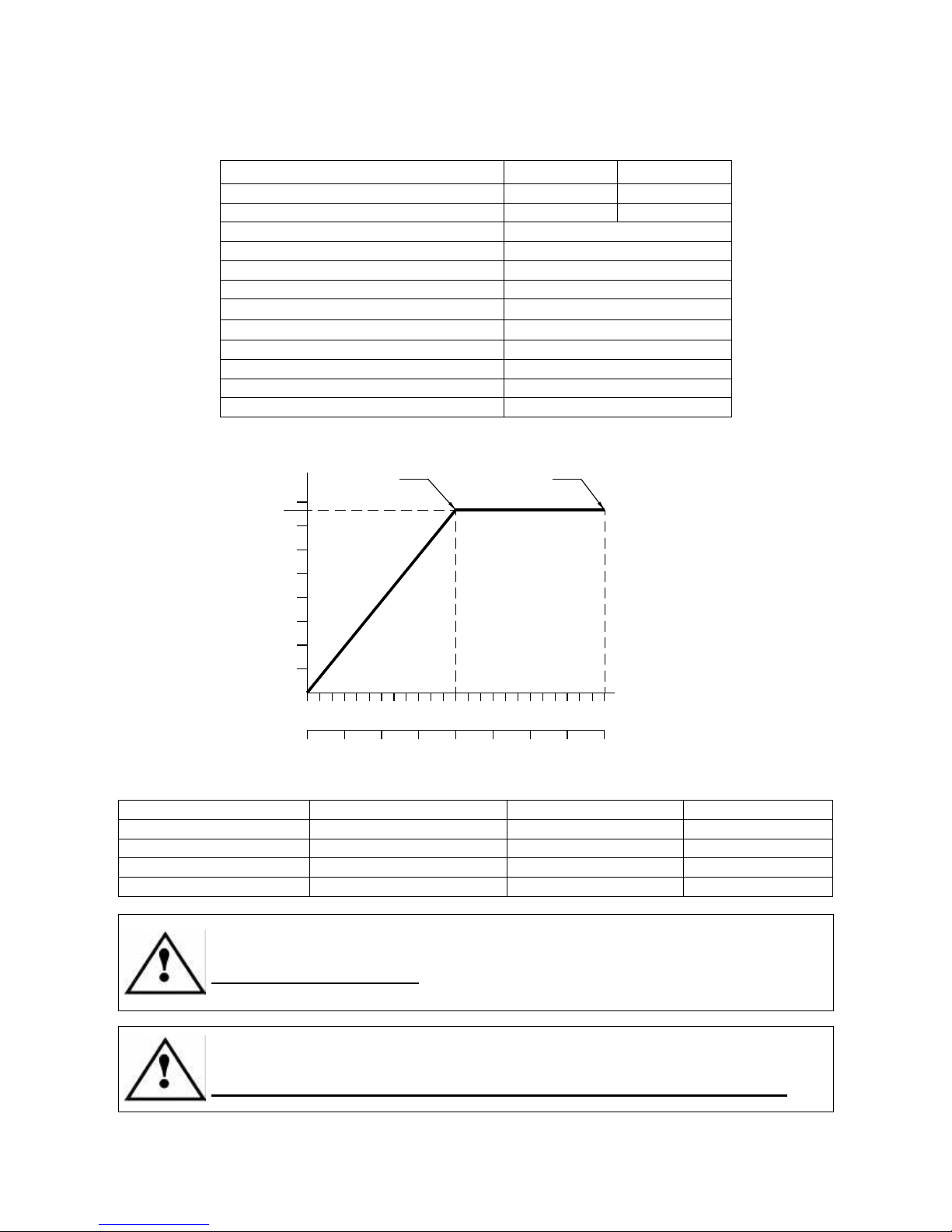
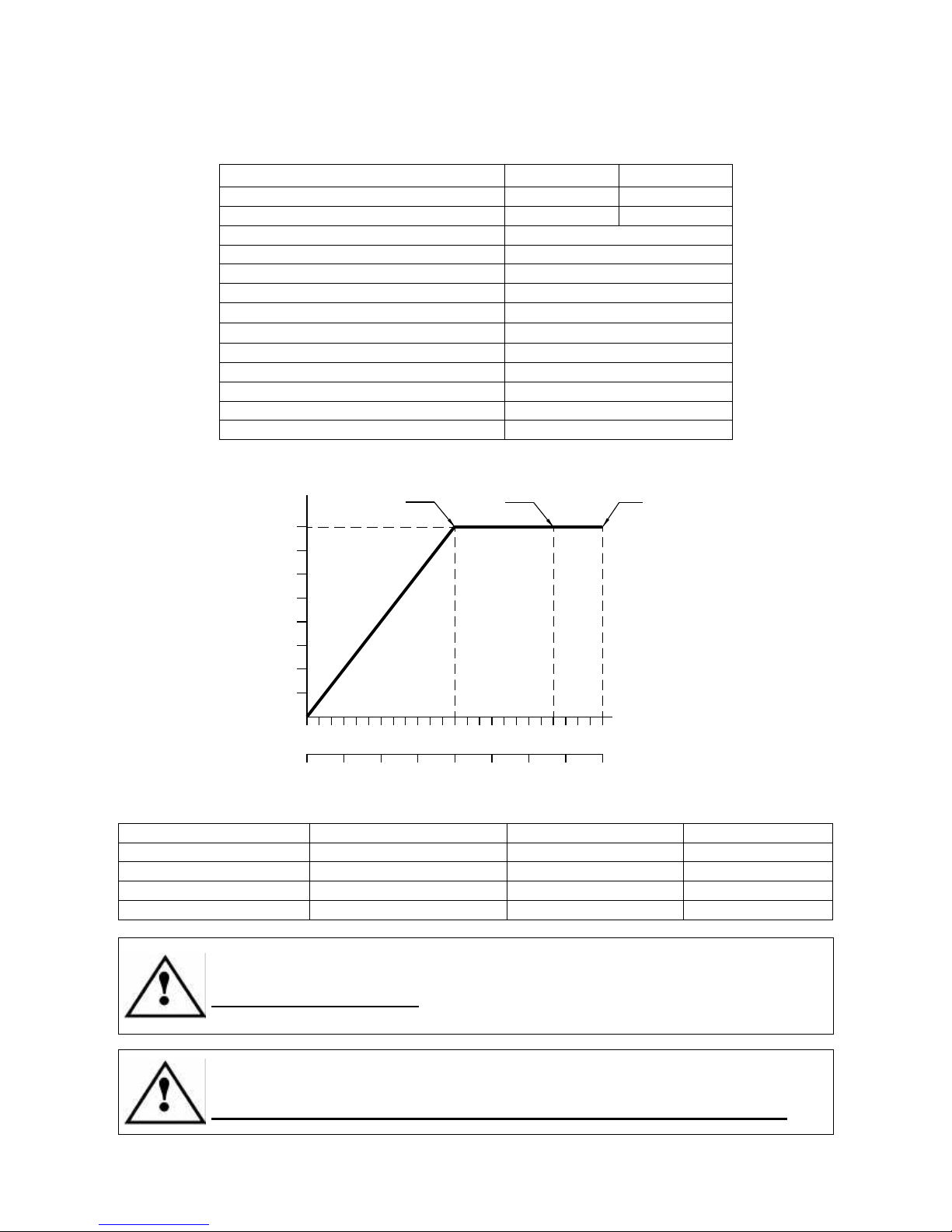
7.2.2 Specifications and performance of ES915 2 Pole, 3.8 kW units
Terminal connection type
Star Delta
Rated voltage (*)
380 V ± 10% 220 V ± 10%
Rated current
8.3 A 14.4 A
Rated speed
12000 rpm (200 Hz)
Rated power
3.8 kW
Duty type
S1
Rated torque
3 Nm
Rated efficiency η
0.8
Power factor cos ϕ
0.8
Number of poles
2
Insulation class
H
Type of cooling
Cooling fan
Weight
~ 21 kg
[(*) from inverter]
kW (S1)
Hz
0
3 6 9 12 15 18 21 2 4
1
2
3
4
0
50
100
150
200
250
300
350
400
3,8
3 Nm1,5 N
m
rpm x 1000
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
ISO30 STEEL STEEL 20000rpm / 333Hz
ISO30 CERAMIC STEEL 24000rpm / 400Hz
ISO30 CERAMIC CERAMIC 24000rpm / 400Hz
ISO30 CRONIDUR / CHROMEX CERAMIC 28000rpm / 467Hz
The 3.8 kW 2 Pole motor is also available in a configurable double voltage
version.
Configurable models only: Check that the power terminals are correctly wired
for the supply voltage before installing the unit.
The maximum continuous current inverter parameter must match the rated
current value in the table above (also stated on the motor’s data label).
Select the right value depending on whether the connection is star or delta.
Page 16
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 16/98
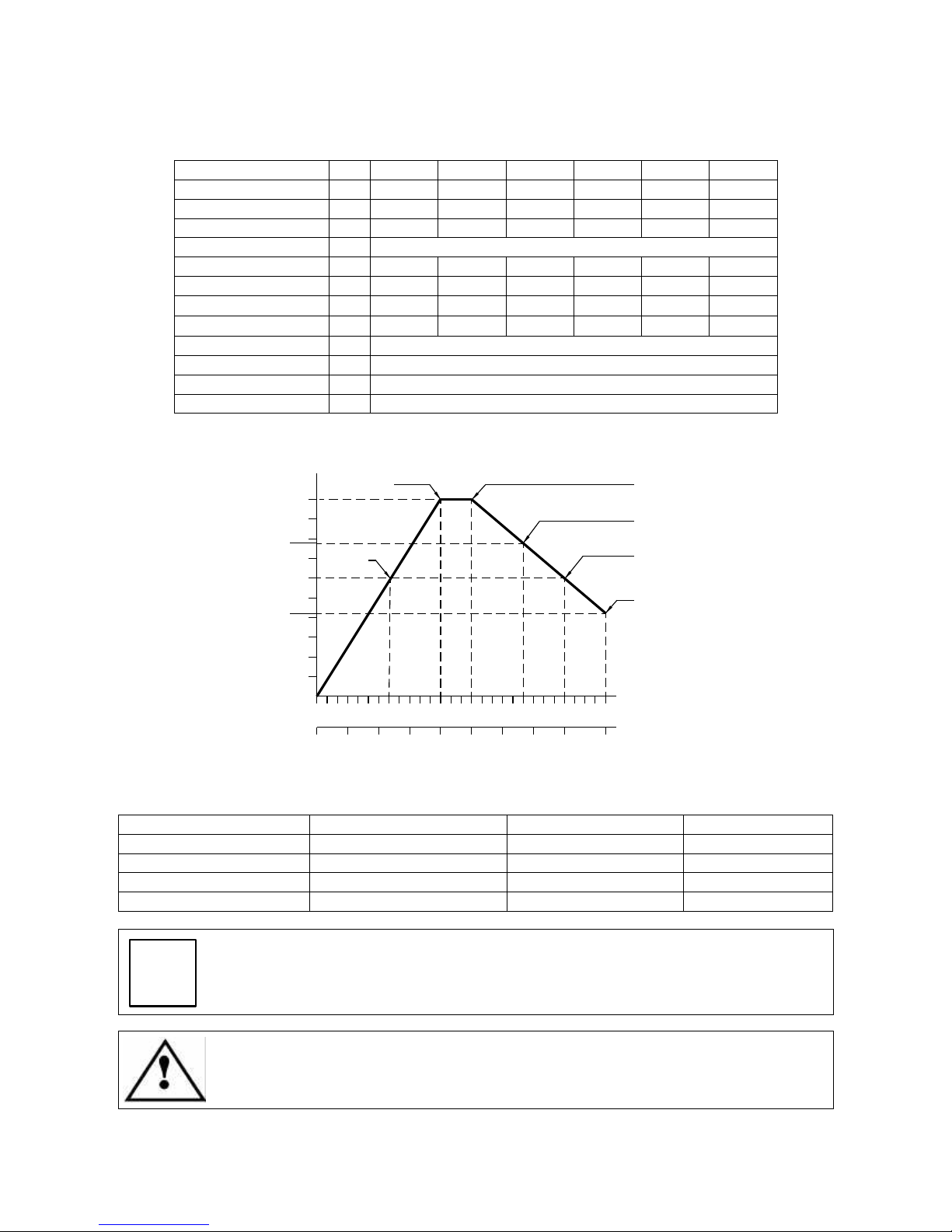
7.2.3 Specifications and performance of ES915 4 Pole, 5 kW units
Rated voltage (*)
V 225 ±10% 380 ±10% 380 ±10% 380 ±10% 380 ±10% 380 ±10%
Rated frequency
Hz 233 400 500 667 800 933
Rated speed
rpm 7000 12000 15000 20000 24000 28000
Rated power
kW 3 5 5 3.9 3 2,1
Duty type
S1
Rated torque
Nm 4 4 3.2 1.7 1.2 0.7
Rated current
A 12 12 10,5 9.2 7 4
Rated efficiency η
0.8 0.8 0.8 0.8 0.8 0.8
Power factor cos ϕ
0.85 0.85 0.85 0.8 0.8 0.75
Number of poles
4
Insulation class
F
Type of cooling
Cooling fan
Weight
kg ~ 21
[(*) from inverter]
kW (S1)
Hz
0
rpm x 1000
3 6 9 12 15 18 21 24 28
2,1
3,9
5
0
100
200
300
400
500
600
700
933
4
1
3
4 Nm
4 Nm
3,2 Nm
1,7 Nm
0,7 Nm
800
1,2 Nm
2
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
ISO30 STEEL STEEL 20000rpm / 667Hz
ISO30 CERAMIC STEEL 24000rpm / 800Hz
ISO30 CERAMIC CERAMIC 24000rpm / 800Hz
ISO30 CRONIDUR / CHROMEX CERAMIC 28000rpm / 933Hz
i
The 5 kW, 4 Pole motor is not available with configurable double voltage power
terminals.
The maximum continuous current inverter parameter must match the maximum
value of the rated current in the table above (also stated on the motor’s data
label).
Page 17
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 17/98
7.3 TECHNICAL SPECIFICATIONS OF ES915 L
7.3.1 Overall dimensions of ES915 L HSK F63 Long Nose
Page 18
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 18/98
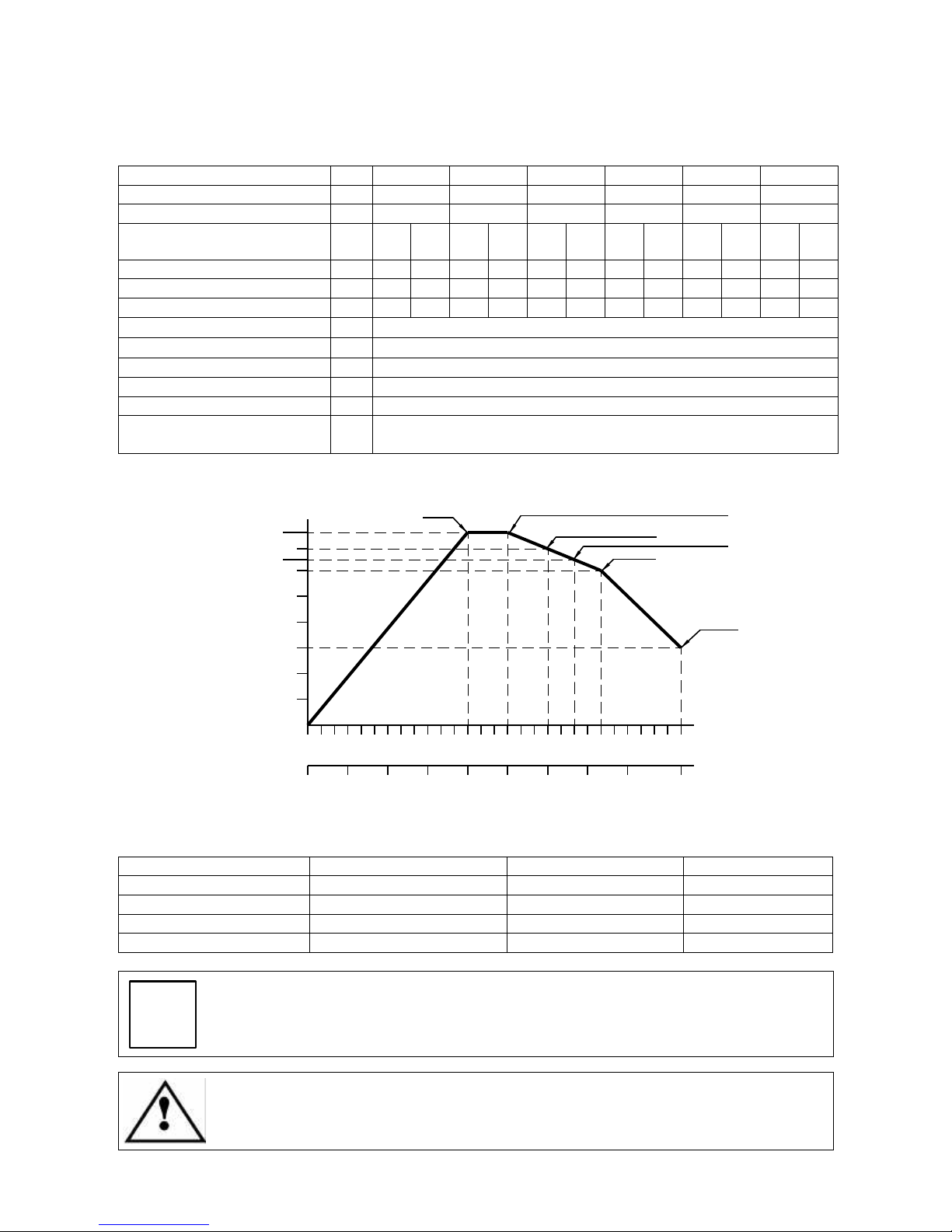
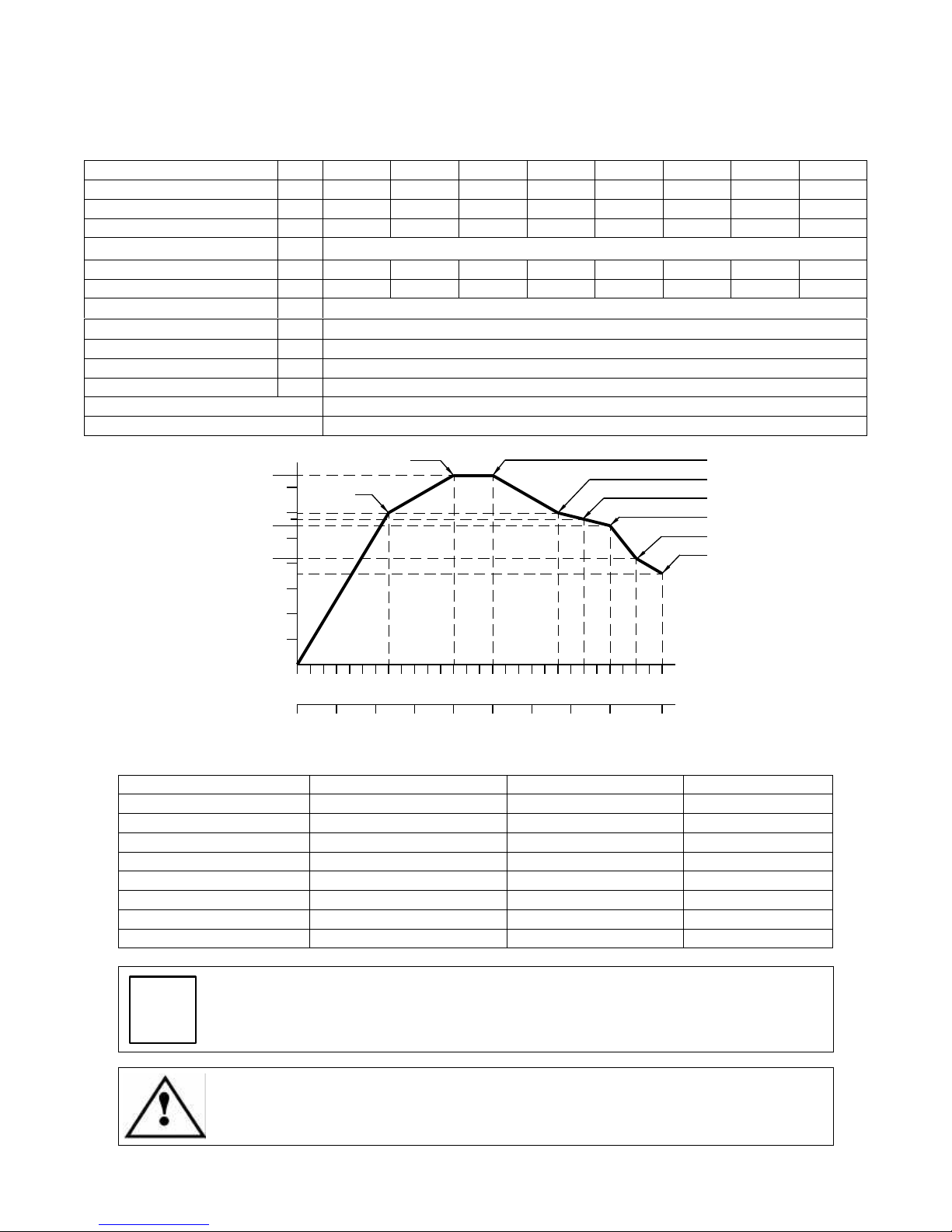
7.3.2 Specifications and performance of ES915 L 4 Pole, 7.5 kW units
Rated voltage (*)
V
380 ±10% 380 ±10% 380 ±10% 380 ±10% 380 ±10% 380 ±10%
Rated frequency
Hz 400 500 600 667 733 933
Rated speed
rpm 12000 15000 18000 20000 22000 28000
Duty type
S1
contS650%S1contS650%S1contS650%S1contS650%S1contS650%S1contS650%
Rated power
kW
6,5 7,5 6,5 7,5 6,1 6,7 5,8 6,4 5,5 6 3 3
Rated torque
Nm 5,2 6 4,1 4,8 3,2 3,6 2,8 3,1 2,4 2,6 1 1
Rated current
A
15 18 15 18 14 15,7 13 16 13,1 14,1 7,5 7,5
Rated efficiency η
0,82
Power factor cos ϕ
0,74
Number of poles
4
Insulation class
F
Type of cooling
Liquid cooling
Weight of
LONG NOSE variant
kg ~ 29
[(*) from inverter]
kW (S6 50%)
Hz
0
rpm x 1000
3 6 9 12 15 18 21 24 28
1
2
3
4
5
6
6,7
0
100
200
300
400
500
600
700
933
7,5
6 Nm
4,8 N
m
3,6 Nm
800
2,6 Nm
1 Nm
6,4
3,1 N
m
Note:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
HSK F63 STEEL STEEL 18000rpm / 600Hz
HSK F63 CERAMIC STEEL 20000rpm / 667Hz
HSK F63 CERAMIC CERAMIC 22000rpm / 733Hz
HSK F63 CRONIDUR / CHROMEX CERAMIC 28000rpm / 933Hz
i
The 7.5 kW, 4 Pole motor is not available with configurable double voltage
power terminals.
The maximum continuous current inverter parameter must match the maximum
value of the rated current in the table above (also stated on the motor’s data
label).
Page 19
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 19/98
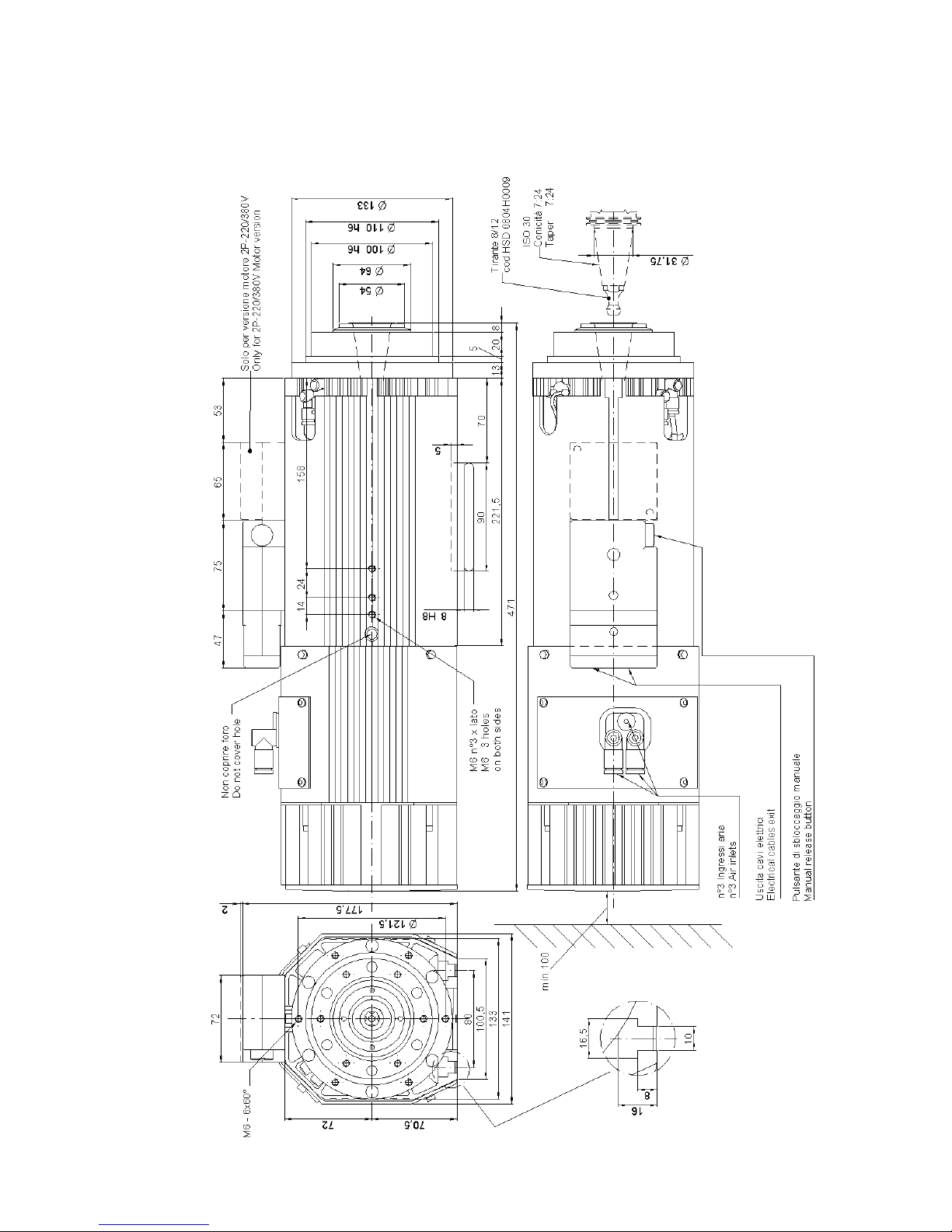
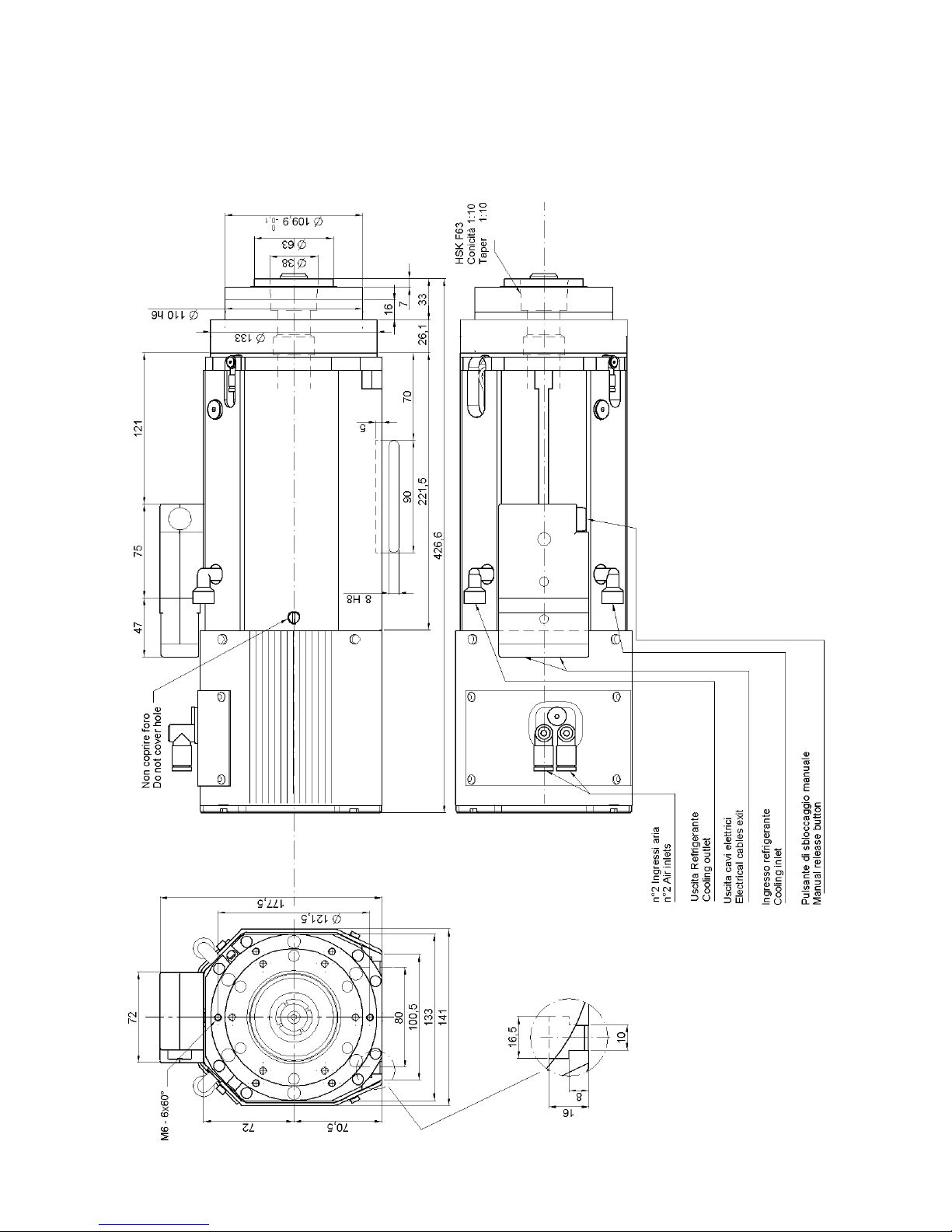
7.4 TECHNICAL SPECIFICATIONS OF ES919
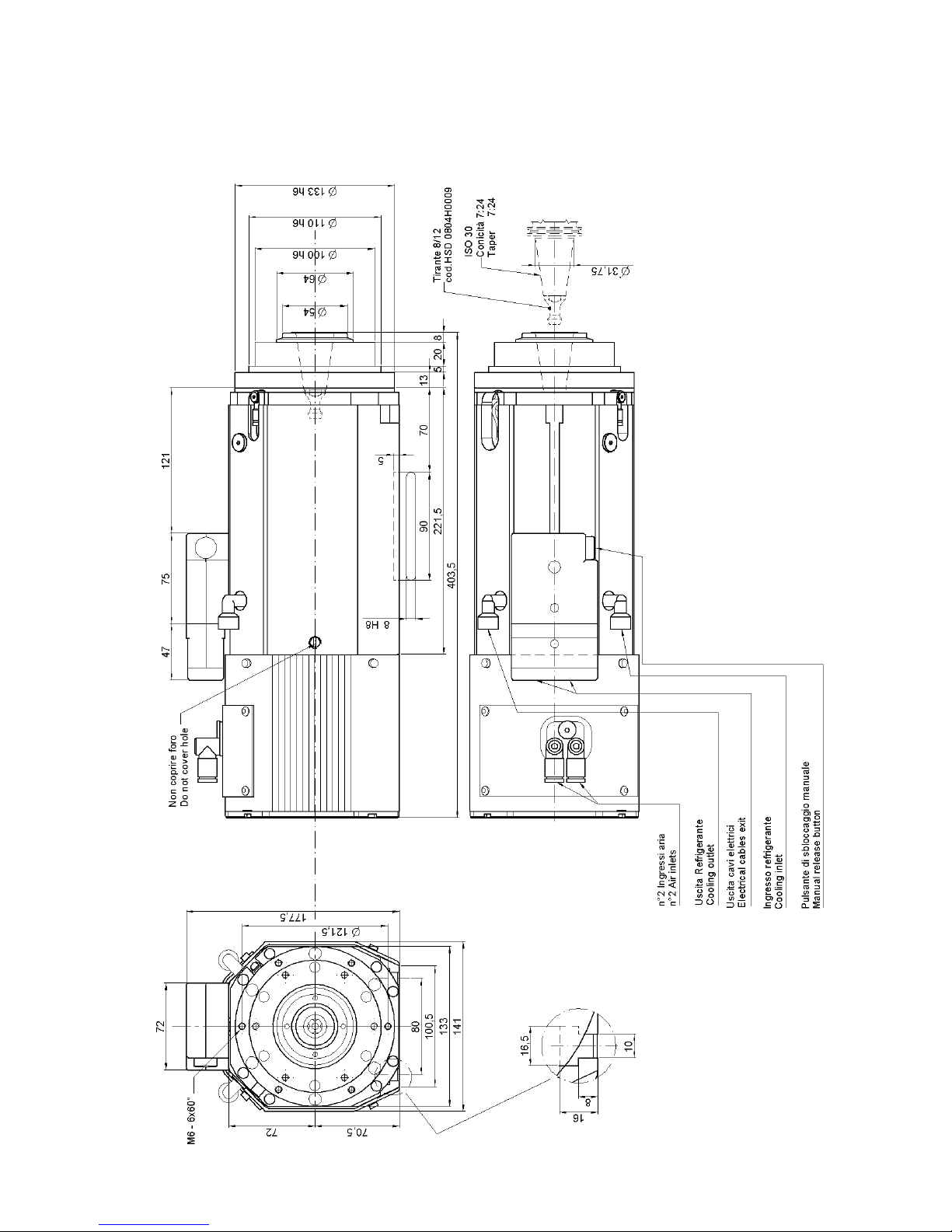
7.4.1 Overall dimensions of ES919 ISO30 Short Nose
Page 20
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 20/98
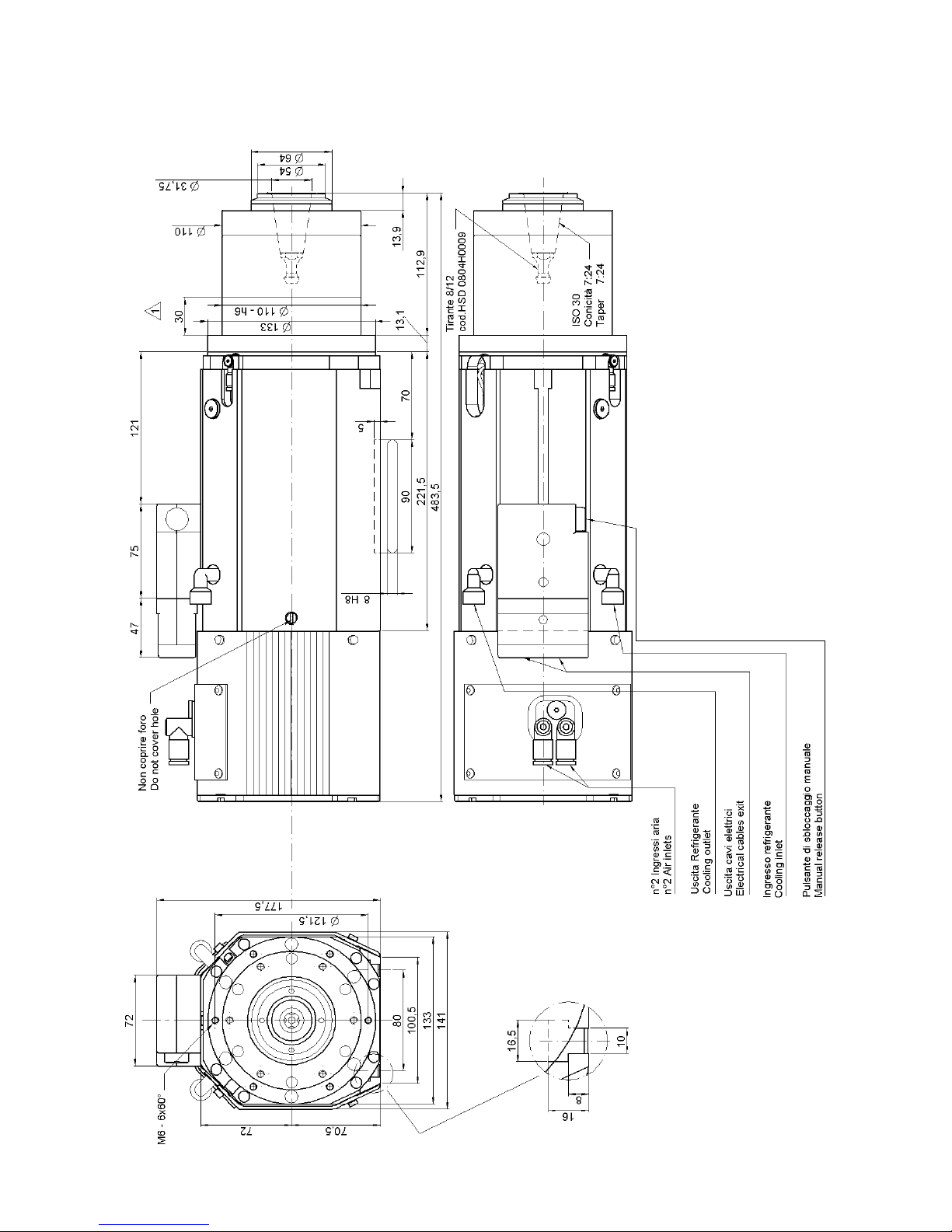
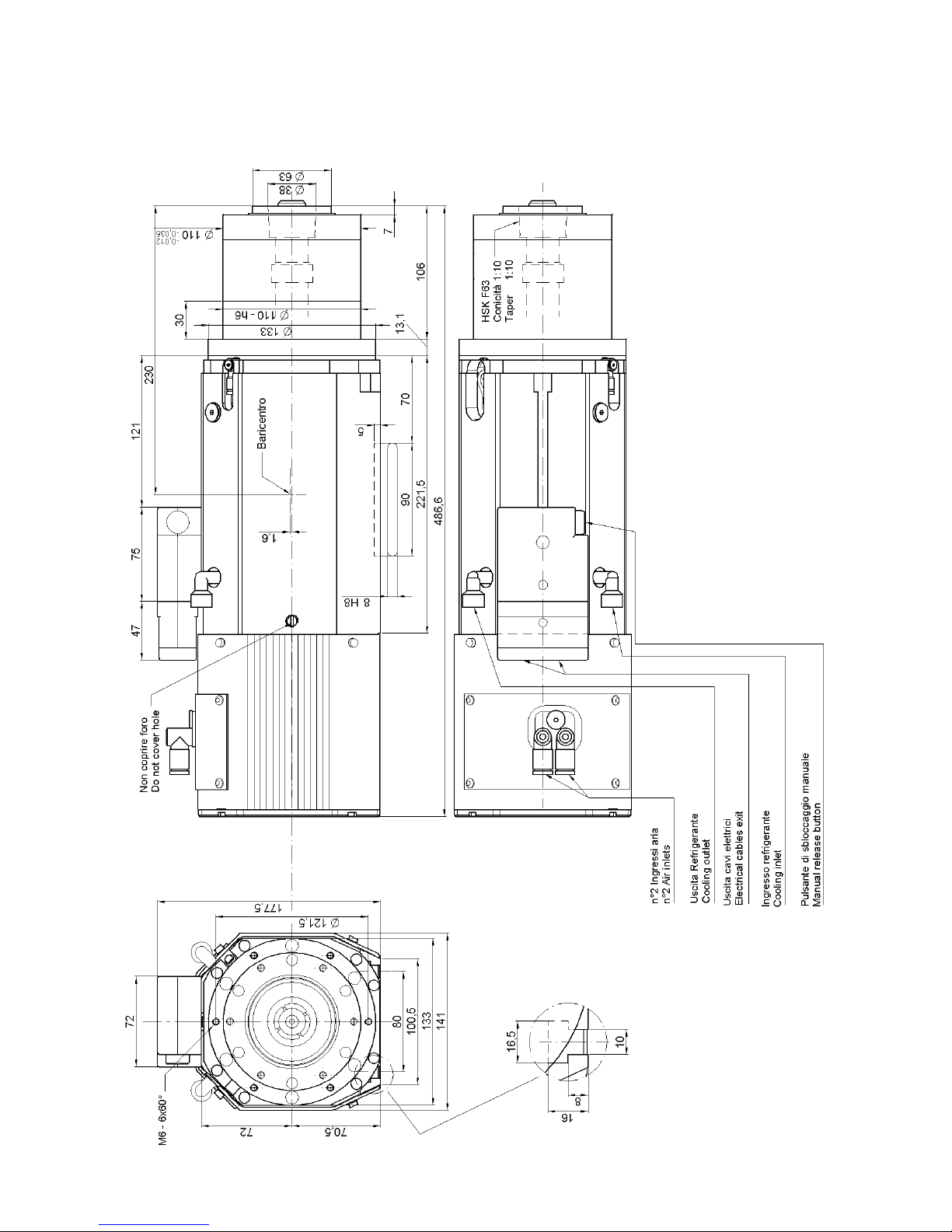
7.4.2 Overall dimensions of ES919 ISO30 Long Nose
Page 21

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 21/98
7.4.3 Overall dimensions of ES919 HSK F63 Short Nose
Page 22
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 22/98
7.4.4 Overall dimensions of ES919 HSK F63 Long Nose
Page 23
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 23/98
7.4.5 Specifications and performance of ES919 2 Pole, 7 kW units
Terminal connection type
Star Delta
Rated voltage (*)
380 V ± 10% 220 V ± 10%
Rated current
16 A 28 A
Rated speed
12000 rpm (200 Hz)
Rated power
7 kW
Duty type
S1
Rated torque
5.6 Nm
Rated efficiency η
0.8
Power factor cos ϕ
0.8
Number of poles
2
Insulation class
H
Type of cooling
Cooling fan
Weight of SHORT NOSE variant
~ 26 kg
Weight of LONG NOSE variant
~ 31 kg
[(*) from inverter]
kW (S1)
Hz
0
rpm x 1000
3 6 9 1 2 15 18 21 2 4
1
2
3
4
5
6
7
0
50
100
150
200
250
300
350
400
5,6 Nm3,3 Nm2,8 N
m
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
ISO30 STEEL STEEL 20000rpm / 333Hz
ISO30 CERAMIC STEEL 24000rpm / 400Hz
ISO30 CERAMIC CERAMIC 24000rpm / 400Hz
ISO30 CRONIDUR / CHROMEX CERAMIC 28000rpm / 467Hz
The 7 kW 2 Pole motor is also available in a configurable double voltage
version.
Configurable models only: Check that the power terminals are correctly wired
for the supply voltage before installing the unit.
The maximum continuous current inverter parameter must match the rated
current value in the table above (also stated on the motor’s data label).
Select the right value depending on whether the connection is star or delta.
Page 24
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 24/98
7.4.6 Specifications and performance of ES919 2 Pole, 8 kW units
Terminal connection type
Star Delta
Rated voltage (*)
380 V ± 10% 220 V ± 10%
Rated current
18 A 32 A
Rated speed
12000 rpm (200 Hz)
Rated power
8 kW
Duty type
S1
Rated torque
6.4 Nm
Rated efficiency η
0.8
Power factor cos ϕ
0.8
Number of poles
2
Insulation class
H
Type of cooling
Cooling fan
Weight of SHORT NOSE variant
~ 26 kg
Weight of LONG NOSE variant
~ 31 kg
[(*) from inverter]
kW (S1)
Hz
0
rpm x 1000
3 6 9 12 15 18 21 24
1
2
3
4
5
6
7
8
0
50
100
150
200
250
300
350
400
6,4 N
m
3,6 Nm 3,2 Nm
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
ISO30 STEEL STEEL 20000rpm / 333Hz
ISO30 CERAMIC STEEL 24000rpm / 400Hz
ISO30 CERAMIC CERAMIC 24000rpm / 400Hz
ISO30 CRONIDUR / CHROMEX CERAMIC 28000rpm / 467Hz
The 8 kW 2 Pole motor is also available in a configurable double voltage
version.
Configurable models only: Check that the power terminals are correctly wired
for the supply voltage before installing the unit.
The maximum continuous current inverter parameter must match the rated
current value in the table above (also stated on the motor’s data label).
Select the right value depending on whether the connection is star or delta.
Page 25

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 25/98
7.4.7 Specifications and performance of ES919 4 Pole, 5.5 kW units
Rated voltage (*)
380 V ± 10% 380 V ± 10% 380 V ± 10%
Rated frequency
233 Hz 400 Hz Hz 600
Rated speed
7000 rpm 12000 rpm 18000 rpm
Rated power
5.5 kW 4.5 kW 1.5 kW
Duty type
S1
Rated torque
7.5 Nm 3.6 Nm 0.8 Nm
Rated current
15 A 14 A 6.5 A
Rated efficiency η
0,8
Power factor cos ϕ
0,8
Number of poles
4
Insulation class
H
Type of cooling
Cooling fan
Weight
~ 26 kg
[(*) from inverter]
kW (S1)
Hz
0
rpm x 1000
3 6 9 12 15 18
1
2
3
4
5
0
100
200
300
400
500
600
5,5
4,5
1,5
7,5 N
m
3,6 Nm
0,8 Nm
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
ISO30 STEEL STEEL 18000rpm / 600Hz
ISO30 CERAMIC STEEL 18000rpm / 600Hz
i
The 5.5 kW, 4 Pole motor is not available with configurable double voltage
power terminals.
The maximum continuous current inverter parameter must match the maximum
value of the rated current in the table above (also stated on the motor’s data
label).
Page 26
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 26/98
7.4.8 Specifications and performance of ES919 4 Pole, 7.5 kW units
Rated voltage (*)
V 225 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10%
Rated frequency
Hz 233 400 500 667 733 800 867 933
Rated speed
rpm 7000 12000 15000 20000 22000 24000 26000 28000
Rated power
kW 6 7.5 7.5 6 5.75 5.5 4.2 3.6
Duty type
S1
Rated torque
Nm 8.2 6 4.8 2.9 2.5 2.2 1.5 1.2
Rated current
A 25 20 17 15 13 13 10 11.5
Rated efficiency η
0,8
Power factor cos ϕ
0,8
Number of poles
4
Insulation class
F
Type of cooling
Cooling fan
Weight of SHORT NOSE variant
~ 26 kg
Weight of LONG NOSE variant
~ 31 kg
[(*) from inverter]
kW (S1)
Hz
0
rpm x 1000
3 6 9 12 15 18 21 24 28
1
2
3
4
5
6
7
0
100
200
300
400
500
600
700
933
4,2
7,5
8,2 Nm
6 Nm4,8 N
m
2,9 Nm
2,2 Nm
800
5,5
1,5 Nm
5,5
2,5 Nm
1,2 Nm
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
HSK F63 STEEL STEEL 18000rpm / 600Hz
HSK F63 CERAMIC STEEL 20000rpm / 667Hz
HSK F63 CERAMIC CERAMIC 22000rpm / 733Hz
HSK F63 CRONIDUR / CHROMEX CERAMIC 26000rpm / 867Hz
ISO30 STEEL STEEL 20000rpm / 667Hz
ISO30 CERAMIC STEEL 24000rpm / 800Hz
ISO30 CERAMIC CERAMIC 24000rpm / 800Hz
ISO30 CRONIDUR / CHROMEX CERAMIC 28000rpm / 933Hz
i
The 7.5 kW, 4 Pole motor is not available with configurable double voltage
power terminals.
The maximum continuous current inverter parameter must match the maximum
value of the rated current in the table above (also stated on the motor’s data
label).
Page 27
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 27/98
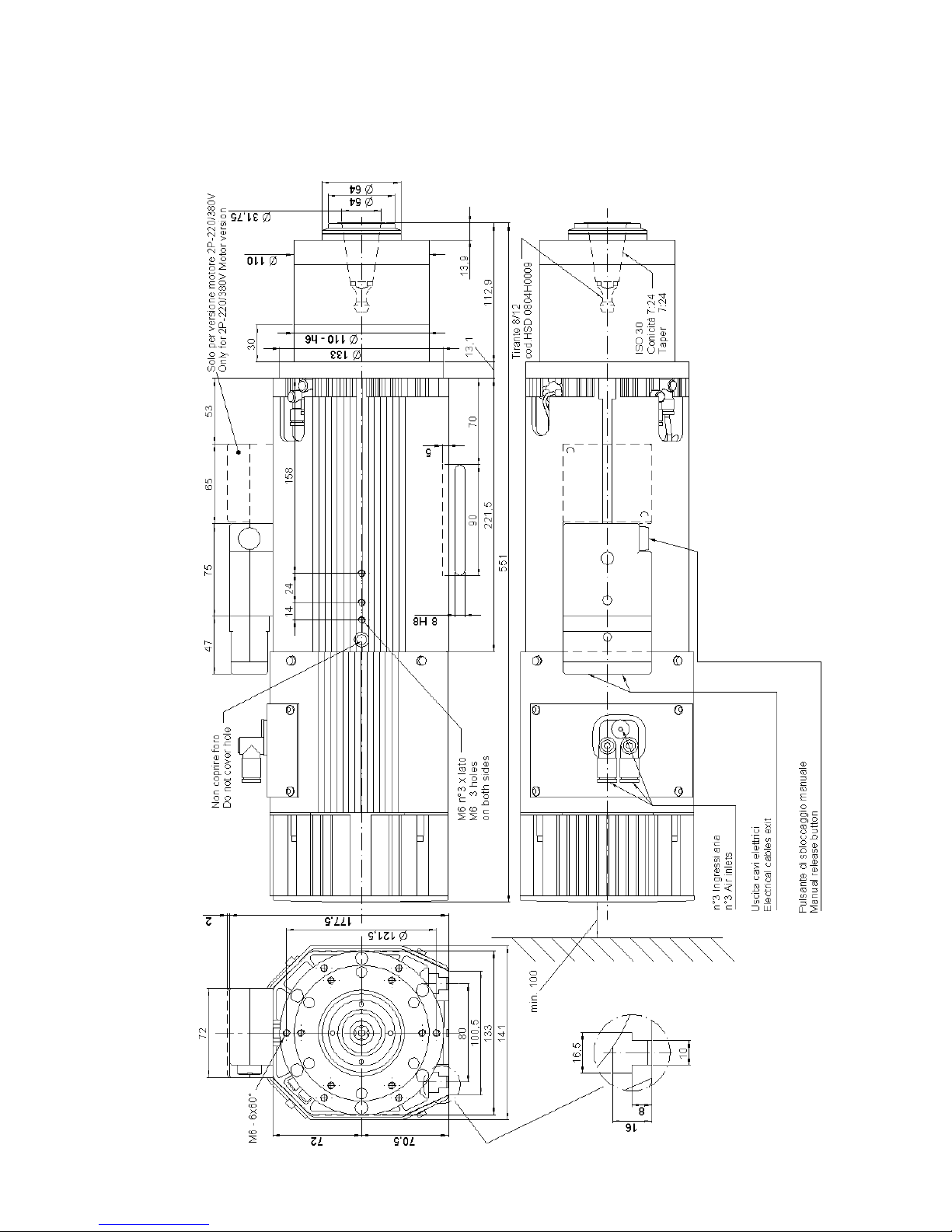
7.5 TECHNICAL SPECIFICATIONS OF ES919 L
7.5.1 Overall dimensions of ES919 L ISO30 Short Nose
Page 28
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 28/98
7.5.2 Overall dimensions of ES919 L ISO30 Long Nose
Page 29
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 29/98
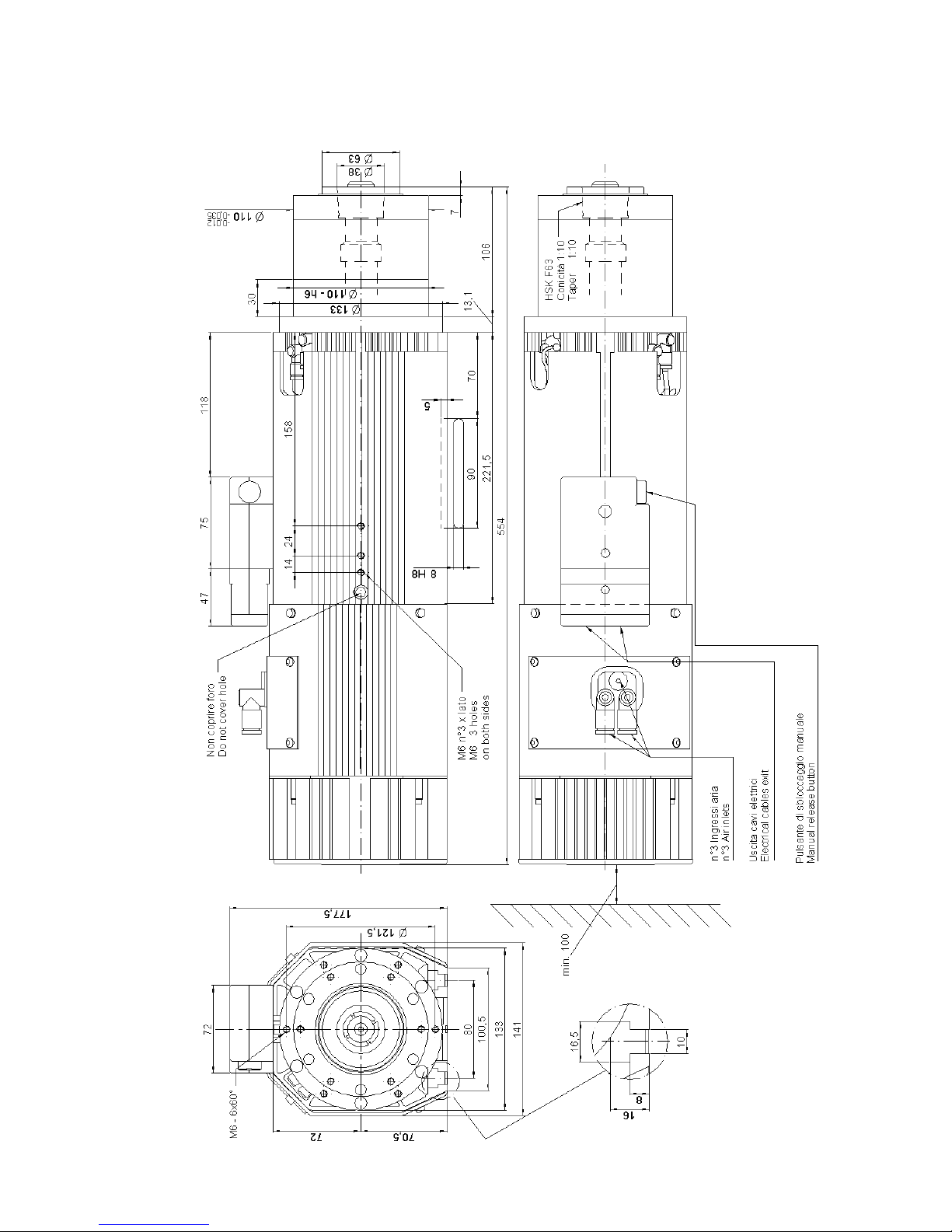
7.5.3 Overall dimensions of ES919 L HSK F63 Short Nose
Page 30
______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 30/98
7.5.4 Overall dimensions of ES919 L HSK F63 Long Nose
Page 31

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 31/98
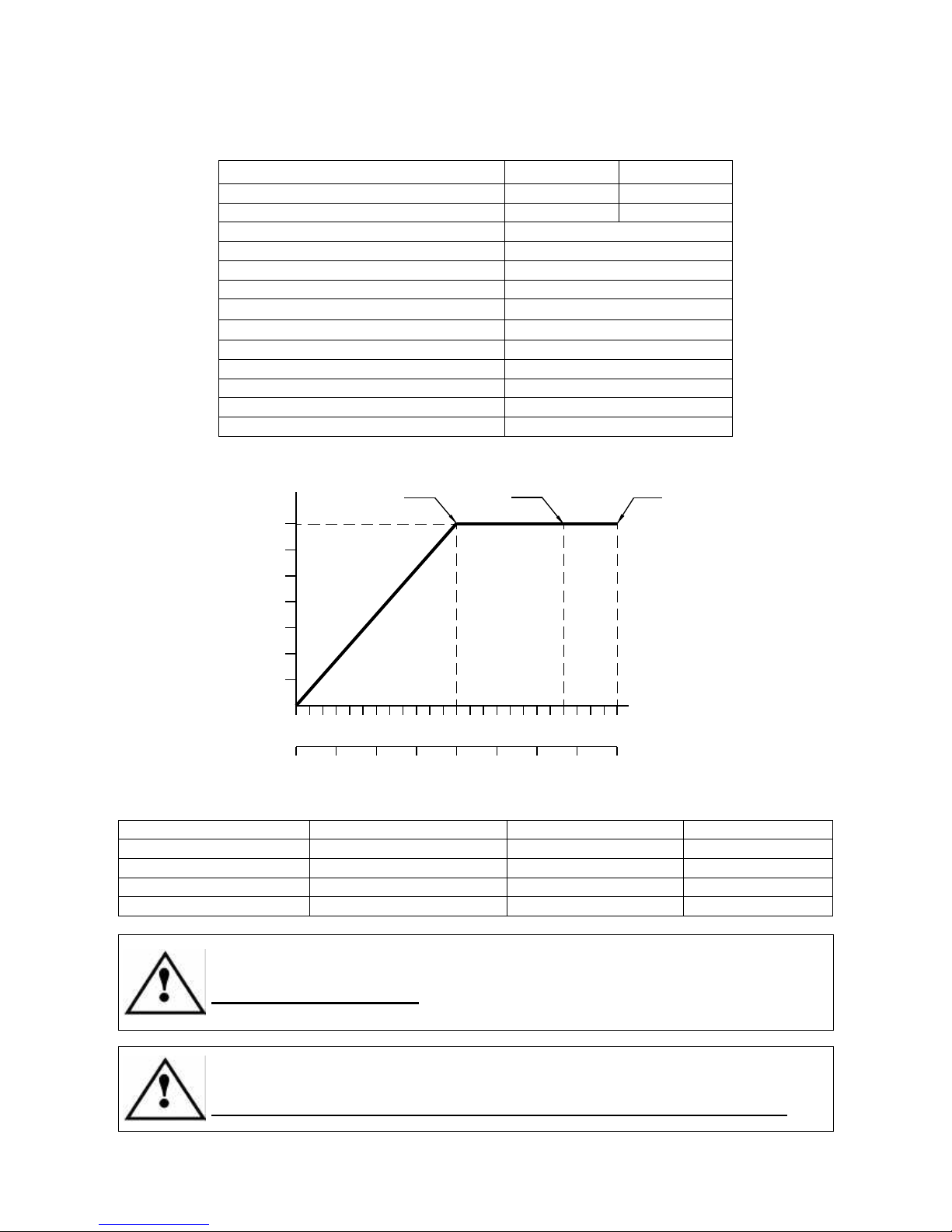
7.5.5 Specifications and performance of ES919 L 4 Pole, 12 kW units
Rated voltage (*)
V 225 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10% 380 ± 10%
Rated frequency
Hz 233 400 500 667 733 800 867
Rated speed
rpm 7000 12000 15000 20000 22000 24000 26000
Rated power
kW 7 12 9,5 7,3 6,4 5,5 4,6
Duty type
S1
Rated torque
Nm 9,5 9,5 6 3,5 2,8 2,2 1,7
Rated current
A 27 27,5 22 17 16,5 14 11,8
Rated efficiency η
0,8
Power factor cos ϕ
0,8
Number of poles
4
Insulation class
F
Type of cooling
Liquid
Weight of SHORT NOSE variant
~ 30 kg
Weight of LONG NOSE variant
~ 34 kg
[(*) from inverter]
kW (S1)
Hz
0
rpm x 100
0
3 6 9 12 15 18 21 24 26
2
4
6
8
10
12
0
100
200
300
400
500
600
700
867
5,5
9,5 Nm
2,2 N
m
6 N
m
3,5 N
m
9,5 Nm
7
6,4
9,5
800
7,3
1,7 N
m
2,8 N
m
Notes:
TOOL HOLDER FRONT BEARINGS REAR BEARINGS MAX SPEED
HSK F63 CERAMIC STEEL 20000rpm / 667Hz
HSK F63 CERAMIC CERAMIC 22000rpm / 733Hz
HSK F63 CRONIDUR / CHROMEX CERAMIC 26000rpm / 867Hz
ISO30 CERAMIC CERAMIC 24000rpm / 800Hz
i
The 12 kW, 4 Pole motor is not available with configurable double voltage power
terminals.
The maximum continuous current inverter parameter must match the maximum
value of the rated current in the table above (also stated on the motor’s data
label).
Page 32

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 32/98
7.6 TECHNICAL SPECIFICATIONS OF BELT DRIVEN C AXIS UNIT
7.6.1 Overall dimensions of ES919 ISO30 Short Nose with belt driven C Axis
unit
Page 33

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 33/98
7.6.2 Overall dimensions of gear units
Page 34

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 34/98
7.6.3 Technical specifications for belt driven C axis unit
Syncroflex ATS5 transmission belt drive.
Main specifications for a servomotor giving 1.27 Nm at 3000 rpm (*)
Rated torque
60 Nm (*)
Starting torque
80 Nm (*)
Overall gear ratio
1 / 60
Total mechanical efficiency
0.8
Epicyclic gear backlash
5’
Positioning precision
10’
Gearbox input rpm
3000 rpm (4000 rpm max)
Rated gearbox input torque
2.5 Nm
Starting gearbox input torque
4 Nm
Weight
4 Kg (without servomotor)
(*) Technical specifications depend on the type of servomotor installed by the customer.
i
Use of the belt driven C axis unit is described in section 13.3
i
ONLY FOR UNITS WITH BELT DRIVEN C AXIS:
On models with belt driven C axis, the spindle shaft kit must be replaced by HSD
technical assistance. Replacement by the customer is not permitted.
Page 35

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 35/98
7.7 TECHNICAL SPECIFICATIONS OF COMPONENTS
7.7.1 Bearings
The front of the shaft is supported by a pair of precision angular contact ball bearings, 40 mm
diameter for versions with ISO 30 tool fittings and 45 mm diameter for versions with HSK F63
fittings.
The rear of the shaft is supported by a pair of precision angular contact ball bearings of 30 mm
diameter.
All bearing pairs are pre-loaded and lubricated for life with special high speed grease.
The bearings are lubricated for life and do not require greasing.
7.7.2 Tool holder locking and release device
The tool holder is mechanically locked by springs that develop an axial force of:
ELECTRO-SPINDLE
MODEL
AXIAL SPRING
FORCE
AXIAL FORCE
ON TOOL HOLDER
ES915 ISO 30--- 3200 N ± 10% _3000 N ± 10%
ES919 ISO 30--- 3500 N ± 10% _3200 N ± 10%
ES919 HSK F63 3850 N ± 10% 11000 N ± 10%
Tool release is achieved by the movement of a single acting, double stage, compressed air
cylinder operating at a pressure of 7 bar (100 PSI).
i
The axial force applied to the tool holder by the locking springs is
guaranteed to remain constant for a minimum of 2,000,000 tool change
cycles.
1 tool change cycle = tool locked / tool released / tool locked
Page 36

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 36/98
7.7.3 Automatic cleaning of the tool holder and internal pressurization
The tool holder cone and its conical housing in the spindle shaft are automatically cleaned by the
air purge during the tool change phase.
This prevents dirt from building up on the mating surface. The condition of the surface should
nevertheless be regularly checked as described in section 12.1 on scheduled maintenance.
The pneumatic circuit for internal pressurization prevents dirt from entering the electro-spindle.
This system is fed at 4 bar (58 PSI). Waste air is exhausted through the forward facing labyrinth
ports in the spindle nose.
Compressed air at 4 bar (58 PSI) must always be delivered to the electrospindle even when it is not operating.
7.7.4 Proximity sensors
Sensor type: PNP proximity; NO (Normally Open)
Voltage 10 - 30 V (DC)
Maximum load 200 mA
No-load consumption < 10 mA
Rated read distance 0.8 MM
7.7.5 Tool release button
Push-button specifications Lamp specifications
Rated voltage (DC) 24 V Rated voltage (DC) 24 V
Maximum current 100 mA Rated power 0.7 W
Rated current 29 mA
Page 37

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 37/98
7.7.6 Thermal switch
The electro-spindle motor windings are protected by a normally closed bi-metallic switch encased
in the stator. A second bi-metallic switch protects the cooling fan motor.
The two switches are connected in series (see Figure 11.3).
The switches open if temperature reaches a potentially damaging level and close again when
temperature drops to normal operating levels.
This thermal switch system must be connected in series to the machine's safety stop system as
shown in section 9.6.4 .
The series of bi-metallic switches has the following specifications:
DC power 48 VDC MAX
AC power 230 VAC MAX
Current 1.6 A MAX
7.7.7 Cooling fan
The electro-spindle is cooled by a rear
mounted fan.
The fan must be powered up even when the
spindle is not operating.
The fan is independent of the spindle shaft.
This solution gives improved efficiency
compared to shaft mounted fans.
If the fan motor overheats, the fan's own
thermal switch, wired in series with the main
electro-spindle switch, shuts the unit down.
Operation is re-enabled when the fan's
motor drops to a safe operating temperature
again.
Power
230 ± 10% VAC
Cycles/second 50 Hz 60 Hz
Consumption 45 W 39 W
Thermal switch: Bi-metallic switch
i
The fan's thermal switch only detects fan motor overheating. It cannot detect that
the fan is prevented from turning, unless this causes overheating. For this
reason, check the condition of the fan regularly.
The fan must remain on at all times when the machine is active even if the
electro-spindle is not operating.
Page 38

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 38/98
§ 8 TRANSPORT AND MOVING
Lifting and moving electro-spindles can create situations of risk to persons nearby. Always follow
the instructions provided by HSD and always use suitable lifting equipment.
Installation and assembly work must be performed only by specialist technicians.
Always use great care in lifting and moving electro-spindles and their components. Avoid impacts
that can damage the body which could cause malfunctions.
IT IS THE RESPONSIBILITY OF THE CUSTOMER TO ENSURE THAT THE LIFTING EQUIPMENT,
CABLES, SLINGS AND CHAINS USED IS SUITABLE FOR THE PURPOSE IN TERMS OF
FUNCTIONING AND LOAD CAPACITY.
8.1 STORAGE
If the electro-spindle is to be stored for any length of time, make sure that it is protected against the
elements and in particular against damp, dust, and other forms of damage by the atmosphere or
storage environment.
Check on the general condition of the electro-spindle periodically to prevent deterioration. Turn the
spindle shaft by hand about once a month to keep the bearings free.
STORAGE TEMPERATURE: from –5°C (+23°F) to +55°C (+131°F)
NON-CONDENSING RELATIVE HUMIDITY: from 5% to 90%
8.2 LIFTING THE ELECTRO-SPINDLE IN ITS CRATE
The electro-spindle is shipped in a wooden crate packed with expanded polystyrene foam. The
electro-spindle itself is packed in a VCI plastic bag and is coated in protective grease to prevent
corrosion. Use a clean cloth to wipe the protective grease off the new electro-spindle.
(Note: The expanded polystyrene and the protective bag are plastics and must be disposed of as
such).
Figure 8.1 Example of how to lift the crate
Page 39

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 39/98
A label, shown in figure 7.2, is applied to the crate, stating its weight. The box corresponding to the
correct weight is checked (25 kg in the example shown).
GROSS WEIGHT
15 90
25
√
110
35 130
45 160
55 215
65 270
75 …
Figure 8.2 Label showing weight of crate
Do not lift the electro-spindle by the cooling fan cover. The cover could break and the
electro-spindle could fall, causing serious damage to the unit and injury to the operator.
The lifting diagrams reproduced here are merely examples of possible ways of lifting the
electro-spindle. HSD S.p.a. cannot foresee all possible lifting methods and
configurations for its electro-spindles.
THIS SYMBOL IS USED TO IDENTIFY POTENTIAL LIFTING POINTS.
Page 40

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 40/98
§ 9 INSTALLATION
9.1 FIRST CHECK
Before starting installation, check:
q That no part of the electro-spindle has been damaged during transport and/or handling.
q That the connectors are not damaged in any way.
9.2 PREPARATION OF THE EQUIPMENT REQUIRED FOR INSTALLATION ON
SITE
All work in preparation for installation of the electro-spindle is the responsibility of the customer
(e.g. preparation of electrical power supplies, compressed air etc.).
Make sure that the electrical power line to the electro-spindle is of adequate gauge and power.
Connection of the unit to the power supply must only be done by qualified electricians. The
customer is responsible for all parts of the electrical power supply to the electro-spindle.
The customer is expressly reminded that the electro-spindle must be correctly connected to earth.
Furthermore, the earth connection must comply with applicable regulations in the country in which
the unit is installed and must be duly checked and tested by a qualified electrician.
See below for the installation layout and connection diagrams.
9.3 MECHANICAL INSTALLATION
9.3.1 The supporting surface
i
The supporting surface on which the
electro-spindle is fixed must have a
flatness better than 0.02 mm.
0,02
9.3.2 Positioning the electro-spindle
100
Figure 9.1 Minimum clearance of fan
The electro-spindle must be
installed with at least 100 mm
of free space behind the
cooling fan cover to ensure an
adequate flow of cooling air.
Page 41

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 41/98
9.3.3 Mechanical fixing of the electro-spindle
80
100,5
10
8
16
16,5
Figure 9.2 T slots for anchoring the electro-spindle
Fix the electro-spindle to the carriage or spindle mounting using M8 bolts and nuts fitted in the T
slots and tightened to a torque of 20 Nm. Maximum permitted protrusion of the fixing bolts is 15
mm, as shown in Figure 9.3. Greater protrusion can deform the electro-spindle body and lead to
incorrect fixing, reduced machining precision and reduced machining safety.
(16)
15 MAX 1 MIN
Figure 9.3 Maximum permitted protrusion of bolts in T slots
Maximum protrusion of bolt: 15 mm.
Leave a clearance of at least 1 mm.
Excessive protrusion can deform the
electro-spindle body and reduce machining
precision and safety.
Page 42

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 42/98
9.3.4 Threaded service holes
There are a number of M6 threaded holes in the electro-spindle body, located as shown in Figure
9.4.
Attention: never to block the silenced exhaust air holes
(Position 4 in Figure 9.4).
4
3
1
2
1
Frontal service holes 6
2
C axis fixing holes 6
3
Side service holes
3 (ES919) per side
2 (ES915) per side
4
Silenced exhaust air hole 1 per side
Figure 9.4 Service holes and silenced exhaust air hole
Page 43

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 43/98
9.4 COMPRESSED AIR CONNECTIONS
9.4.1 Compressed air unions
The compressed air unions are quick-fit unions. They are located as shown in Figure 9.5 and are
described in the table below.
2 1
Figure 9.5 Location of the compressed air quick-fit unions
DESCRIPTION
PRESSURE
( bar / PSI )
EXTERNAL
HOSE Ø (mm)
1
Inlet for pressurization and cone
cleaning air
4 / 58 8
2
Tool release air inlet - outlet
7 / 100 8
Page 44

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 44/98
9.4.2 Functional diagram of electro-spindle compressed air connections
Figure 9.6 shows typical compressed air system connections, to be prepared by the customer. The
use of two solenoid valves connected in series reduces the risk of system malfunctions. Though it
is very rare for this type of fault to occur, it can have very serious consequences if it does.
Redundancy is therefore recommended.
5 µ
0,1 µ
1
2
3
5
6 7
4 bar (58 PSI)
4
7 bar (100 PSI)
7 bar (100 PSI)
Figure 9.6 Typical compressed air connection diagram
1
Cone cleaning and internal pressurization air inlet (see also n°1 in Figure 9.5)
2
Tool holder release air inlet (see also n°2 in Figure 9.5)
3
Factory air supply inlet
4
Compressed air filtration/drying group with automatic condensate drain: first stage 5µ and
second stage 0.1µ
5
4 bar (58 PSI) pressure regulator
6
Pressure switch
7
Pair of 3 way, mono-stable solenoid valves
Use 2 separate circuits to connect the solenoid valves (pos. 7 in Figure 9.6) to the
numeric control unit or manual control system.
IMPORTANT:
The air supply to the compressed air circuit
must be dry and filtered
When the machine is powered on, pressurized air must be delivered even when the
electro-spindle is stopped, to prevent dust and dirt from the machining area from
entering the electro-spindle (see section7.7.3 ).
With the spindle stopped, make sure that there is uniform flow of air around the spindle
shaft (pressurization air). If there is not, check the compressed air circuit and
connections.
Page 45

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 45/98
9.5 COOLING CIRCUIT
Liquid-cooled models must be connected to a coolant circuit to dissipate the heat generated during
machining. Coolant must be: water with 10% ethylene glycol.
Out
In
CONNECTION DESCRIPTION THREAD
Out
Coolant circuit outlet G 1/4”
In
Coolant circuit inlet G 1/4”
Hose internal diameter (at least) 8 mm ( 5/16 in. - 315 mils )
9.5.1 Cooler specifications
Cooling capacity 1600 W
Minimum delivery 3 litres/minute ( 0.11 cfm )
Coolant type H2O + 10% ethylene glycol
Cooler set temperature +25°C ( +77°F )
Page 46

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 46/98
9.6 ELECTRICAL CONNECTIONS
9.6.1 Connectors
The electro-spindle is fitted with two connectors, one for power and the other for signals.
Figure 9.7 Location of electrical connectors
9.6.2 Pin layout of fixed signals connector - ISO 30 version
PIN DESCRIPTION
1
Sensor S2 (tool ejected) output
2
Sensor S1 (tool locked) output
3
Sensor S3 (shaft stopped) output
4
+24V DC power to S1, S2, S3
5
+24V DC power to push-button lamp
6
0V power to S1, S2, S3
7
+24V DC power to push-button and
C axis zeroing sensor (SC sensor)
8
Push-button output
7
14
1
2
13
15
12
3
16
8
21
22
20
4
17
11
18
5
19
10
6
9
9
Temperature sensor for front bearings
10
Temperature sensor for front bearings
11
0V power to push-button, lamp, and SC
i
Use AWG22 wires.
12
C axis zeroing sensor output (SC sensor)
Page 47

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 47/98
9.6.3 Pin layout of fixed signals connector - HSK F63 version
PIN DESCRIPTION
1
Sensor S2 (tool ejected) output
2
Sensor series S1 + S4 (tool locked)
output
3
Sensor S3 (shaft stopped) output
4
+24V DC power to S1, S2, S3
5
+24V DC power to push-button lamp
6
0V power to S1, S2, S3, S4
7
+24V DC power to push-button and C
axis zeroing sensor (SC sensor)
8
Push-button output
7
14
1
2
13
15
12
3
16
8
21
22
20
4
17
11
18
5
19
10
6
9
9
Temperature sensor for front bearings
10
Temperature sensor for front bearings
11
0V power to push-button, lamp, and SC
12
C axis zeroing sensor output (SC sensor)
i
Use AWG22 wires.
14
For maintenance
9.6.4 Pin layout of fixed power connector
PIN DESCRIPTION
1
Thermal switch: normally closed bimetallic switch to be connected in series
to machine safety stop system.
230V AC MAX; 48V DC MAX; 1.6A MAX
2
W PE common to pin 7
3
230V AC 50/60 Hz cooling fan
4
U Motor phase
5
Thermal switch (see pin 1)
2
5
3
4
6
1
8
9
7
6
V Motor phase
7
W PE common to pin 2
8
W Motor phase
i
Use AWG10 wires for the
even pins and AWG18 for
odd pins.
9
230V AC 50/60 Hz cooling fan
Page 48

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 48/98
9.6.5 Tool holder release system electrical wiring diagram for electro-spindles
not controlled by CNC
• The control system must disable the tool release push-button
signal while the spindle is rotating.
• The push-button must only be enabled when the spindle is
completely stationary.
• Only use the push-button to lock/release tools on manually
controlled machines.
7 - 8
Pins 7 and 8 of the signals
connector
B
Tool release button
(See section 7.7.5 for technical
specifications.)
P
Pressure switch to prevent tool
release in case of insufficient air
pressure
C
Safety check (spindle stopped
check device)
E
Tool release solenoid valves (See
pos. 7 in Figure 9.6 and the
warnings for it.)
• When button “B” on the electrospindle is pressed, the coils of
solenoids “E” (not supplied) are
energized and the tool holder is
released.
• Press button “B” to release the tool
holder.
24V
7
B
8
P
C
0 V
E
Page 49

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 49/98
9.6.6 Configurable power terminals (optional)
On request, some models can
be provided with power
terminals that can be
configured either for delta or
star connections, for use with
rated voltages of 380 V or 220
V.
See section § 7 for details of
models available with
configurable power terminals.
The figure on the left shows the
location of the power terminals,
under a protective cover fixed in
place by two screws.
Check what type of connections have been made
in the terminal block before installing the unit.
CONNECTION DIAGRAM
STAR CONNECTIONS
(rated voltage 380V)
DELTA CONNECTIONS
(rated voltage 220V)
RED (STATOR)
380V - PIN6
BLACK (STATOR)
WHITE (STATOR)
BLACK (STATOR)
WHITE (STATOR)
RED (STATOR)
380V - PIN4
380V - PIN8
BLACK (STATOR)
WHITE (STATOR)
RED (STATOR)
RED (STATOR)
220V - PIN6
BLACK (STATOR)
WHITE (STATOR)
220V - PIN8
220V - PIN4
IMPORTANT:
In star connections (for rated voltages of 380V)
the terminals to be short circuited together are
those connected to a single wire.
Page 50

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 50/98
§ 10 GENERAL CHECKS AFTER INSTALLATION AND DURING
START-UP
10.1 CHECKING THE ELECTRO-SPINDLE BEFORE START-UP
Positioning
• There must be at least 100 mm of free space behind the cooling fan cover.
Compressed air connections
• The internal pressurization and cone cleaning air hose must have an external
diameter of 8 mm, and must deliver dry, filtered air at a pressure of 4 bar (58 psi).
• The tool change air hose must have an external diameter of 8 mm, and must
deliver dry, filtered air at a pressure of 7 bar (100 psi).
• (For connection details see the labels on the unit itself and see also section 9.4
above).
i
THE TOOL RELEASE CYLINDER IS
SINGLE ACTING.
Electrical connections
• The ground wire of the electro-spindle and
cooling fan must be connected to the ground
(pins 2 and 7 of the power connector in the
figure on the right).
• The motor's thermal switch (NC switch) must
be connected in series with the machine's
safety stop system (pins 1 and 5 of the power
connector in the figure on the right and section
9.6.4 above).
• 2 pole 220V - 380V configurable motors only:
The connections in the terminal block (380 V
star or 220 V delta) must match the electrospindle power. (See section 9.6.6 and § 7.)
2
5
3
4
6
1
8
9
7
Inverter programming
• The maximum power voltage setting must match the value on the electro-spindle's
data label.
• The minimum frequency value at which maximum voltage is delivered (rated
frequency, also referred to as knee or bend frequency) must match the value on
the electro-spindle's data label.
• The maximum frequency value must match the value on the electro-spindle's data
label.
• The maximum continuous current value must match the value on the electro-
spindle's data label.
• Contact HSD S.p.a. if you wish to check other inverter parameters.
Page 51

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 51/98
10.2 CHECKING THE ELECTRO-SPINDLE ON FIRST START-UP
• Warm up the electro-spindle briefly at no load (see section 11.3 ).
• Make sure that pressurization air comes out from the labyrinth ports in the spindle
nose. (Check with the electro-spindle stationary.)
PRESSURIZED AIR MUST ALWAYS BE PRESENT, EVEN WHEN THE
ELECTRO-SPINDLE IS NOT OPERATING.
• Check that the air from the fan flows towards the spindle nose.
THE FAN MUST ALWAYS BE ON, EVEN WHEN THE ELECTRO-SPINDLE IS
NOT OPERATING.
• Check that the air purge is on during tool changes.
• Check that the compressed air hoses and unions do not interfere with cables or
machine parts during tool change movements (approx. 1 mm).
• Check that the electro-spindle control sensors operate according to the logic
described in section 0.
HSK F63 VERSIONS ONLY: THE ELECTRO-SPINDLE MUST ONLY BE
STARTED UP WITH THE TOOL HOLDER LOCKED IN PLACE ([SENSOR 1 +
SENSOR 4] ON AND SENSOR 2 OFF).
• The tool holder must be ejected about 0.5 – 0.9 mm in ISO 30 versions and 0.5 –
0.6 mm in HSK F63 versions.
TOOL CHANGES MUST ONLY TAKE PLACE WHEN THE SPINDLE AND THE
MACHINE ARE STATIONARY (SENSOR 2 ON AND SENSOR 1(ISO30) OR
SENSOR 1+4(HSK) OFF).
• The push-button on the terminal block must execute a manual tool change.
THIS BUTTON MUST ONLY BE ENABLED WHEN THE SPINDLE AND
MACHINE ARE STATIONARY. (See section 9.6.5 .)
• The direction of spindle rotation must match the settings in the numeric controller.
Page 52

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 52/98
§ 11 OPERATING THE ELECTRO-SPINDLE
11.1 CLIMATIC CONDITIONS
HSD S.p.a. has designed and tested its electro-spindles to operate under the following standard
climatic conditions:
• Altitude not above 1000 m above sea level
• Maximum ambient air temperature not above +40°C (+104°F)
• Minimum ambient air temperature not below -15°C ( +5°F)
• Coolant temperature (if relevant) at inlet to electro-spindle not above +27°C (+81°F)
and not below +23°C (+73°F).
Outside these tolerances some of the values declared in the tables and figures in section § 7 may
vary.
Contact HSD S.p.a. for information on installations other than the standard ones illustrated or
described in this manual.
11.2 RUNNING IN
The electro-spindle is run in in the factory prior to shipment. This ensures correct distribution of the
long-life grease in the bearing races. The run in cycle also includes comprehensive testing of all
electro-spindle controls and signal devices, and simulates various types of working cycles.
11.3 WARMING UP
Every day, when the electro-spindle is started up for the first time, let it warm up slowly without
load, this ensures that the bearings reach their running temperature gradually, and that the
bearing races expand evenly.
The following warming up cycle is recommended, to be performed with the tool holder in place
but without actually machining (no load):
50% maximum rated speed for 2 minutes.
75% maximum rated speed for 2 minutes.
100% maximum rated speed for 1 minute.
Warm the electro-spindle up before machining whenever the machine has been left idle long
enough for it to cool down to ambient temperature.
HSK VERSION ONLY:
NEVER START THE ELECTRO-SPINDLE WITHOUT THE TOOL HOLDER
IN PLACE.
Starting an HSK electro-spindle with no tool holder puts the balance and
functioning of the collet at risk.
Push the tool holder in until it touches the face.
Page 53

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 53/98
11.4 SELECTING THE TOOL HOLDER AND TOOL
11.4.1 ISO 30 tool holders
Always respect the following conditions when selecting a tool holder:
• Cone geometry must comply with DIN 69871 standard.
• Use only ISO 30 tool holders of AT3 precision rating.
• Do not use tool holders that have lumps, hollows, or other shapes that could affect dynamic
balancing.
• Dynamic balancing must be better than G=2.5 (ISO 1940 standard) at the electro-spindle's
maximum rated speed.
• Balancing must always be done with the tool assembled (pull stud, cone, elastic collet, ring nut,
tool).
• Only use pull studs (also referred to as retention knobs) provided by HSD (code 0804H0009).
Proceed as follows to install the pull stud in the ISO 30 cone:
• Thoroughly clean the mating surfaces of the pull stud and its seat.
• Smear the threads of the pull stud with LOCTITE 270 (or similar thread locking compound).
• Tighten the pull stud in place to a torque of 62 Nm.
• Leave the cone rest for at least 12 hours, so that the thread locking compound grips (or follow
the instructions of the locking compound manufacturer, if you have used an alternative to
LOCTITE 270).
Figure 11.1
ISO 30 CONE
DIN 69871
HSD 0804H0009
PULL STUD
WARNING: Incorrect installation or the use of non-original HSD pull
studs can lead to the tool holder cone being thrown from the electrospindle.
Use only pull studs (or retention knobs) from HSD (code 0804H0009).
i
"Pull studs" are also referred to as "retention knobs".
Page 54

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 54/98
11.4.2 HSK F63 tool holders
Always respect the following conditions when selecting a tool holder:
• Cone geometry must comply with DIN 69893 standard.
• Do not use tool holders that have lumps, hollows, or other shapes that could affect dynamic
balancing.
• Dynamic balancing must be better than G=2.5 (ISO 1940 standard) at the electro-spindle's
maximum rated speed.
• Balancing must always be done with the tool assembled (cone, elastic collet, ring nut, tool).
Figure 11.2
HSK F63 CONE
DIN 69893
Never use tool holders that do not comply with the above conditions.
Failure to comply can lead to breakage and accidental release of the
tool holder cone, with potentially serious consequences for the
operator.
HSK VERSION ONLY:
NEVER START THE ELECTRO-SPINDLE WITHOUT THE TOOL
HOLDER IN PLACE.
Starting an HSK electro-spindle with no tool holder puts the balance and
functioning of the collet at risk.
Push the tool holder in until it touches the face.
Page 55

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 55/98
11.4.3 General safety precautions for tool holders
THE RIGHT CHOICE OF TOOL HOLDER IS ESSENTIAL FOR SAFE
MACHINING. CAREFULLY FOLLOW THE INSTRUCTIONS GIVEN IN
SECTIONS 11.4.1 (ISO 30) AND 11.4.2 (HSK F63).
KEEP THE CONICAL SURFACES OF THE TOOL HOLDER AND ITS
HOUSING IN THE SPINDLE SHAFT PERFECTLY CLEAN TO ENSURE
A SAFE GRIP (SEE SECTION 12.1 ).
DURING MACHINING, TAKE GREAT CARE TO AVOID CONTACT
BETWEEN NON-CUTTING ROTATING PARTS AND THE WORK.
DIRT MUST NOT BE ALLOWED TO ENTER THE CONICAL HOUSING.
CLOSE IT WITH A SUITABLE PLUG OR A SPARE TOOL HOLDER.
AT THE END OF THE WORKING DAY, ALWAYS REMOVE THE TOOL
HOLDER FROM THE SPINDLE, TO PREVENT IT FROM STICKING.
PROTECT OR COVER THE SPINDLE NOSE AGAINST
CONTAMINATION.
Page 56

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 56/98
11.4.4 Choosing tools
Dynamic balancing must be better than G=2.5 (ISO 1940 standard) at the electro-spindle's
maximum rated speed.
Always respect the following conditions when selecting a tool:
• Only use fully sharpened tools, and make sure that they are securely locked in the tool holder.
• Never use bent or damaged tools, chipped tools, or tools that are not perfectly balanced.
• Always make sure that the mating surfaces of a tool are perfectly clean and dent free before
fitting the tool in the collet and tool holder.
• Never use tools at speeds in excess of the rated speed by the manufacturer.
• Always ensure that the following essential requirements are met before using any tool at high
speed:
- The tool must be of compact, short, and lightweight design.
- The tool must be a precision instrument, and any inserts must be secured tightly.
- The tool must be balanced and must mate symmetrically with the tool holder.
- The cutting surfaces of the tool must be located near its centre of rotation.
Page 57

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 57/98
11.5 SPEED LIMITATIONS
ALWAYS RESPECT THE MAXIMUM TOOL SPEED (RPM)
SPECIFIED BY THE TOOL MANUFACTURER.
Never exceed the maximum speed specified by the tool manufacturer.
It is the operator's responsibility to decide whether to perform certain machining operations at
slower speeds (NEVER HIGHER) than those specified by the tool manufacturer or those listed as
guidelines in the following pages.
11.5.1 Content of graphs
The graphs on the following pages show sample maximum no-load electro-spindle rotation speeds.
These have been calculated for different total weights of the TOOL + TOOL HOLDER assembly
(including ring nut and elastic collet), and for different distances between the nose of the electrospindle and the centre of gravity “G” of the tool + tool holder assembly.
The tool + tool holder assembly has been considered as a single mass applied at the centre of
gravity “G” (without considering size or shape).
The degree of balancing is that recommended in the previous sections.
The graphs on the following pages are purely indicative. HSD S.p.a. does not know and the
graphs therefore cannot take into account details of individual machining operations, tool
specifications, or characteristics of the material being machined. It is therefore the operator's
responsibility to determine maximum safe speed on a case by case basis.
11.5.2 Reading the graphs
1. Find the graph for your own electro-spindle.
2. Select the curve for distance “X” between the nose of the spindle and the centre of gravity “G”
of the tool + tool holder assembly. If the value of “X” measured on your electro-spindle does not
appear in the graph, use the curve for the next higher value of “X” (see example).
3. Read off the maximum speed value for the weight of the tool + tool holder assembly.
EXAMPLE
You have an ES919 L HSK F63 SHORT NOSE electro-spindle, and want to use a tool + tool
holder assembly weighing a total of 3.5 kg (including ring nut and elastic collet). The distance
between the spindle nose and the centre of gravity “G” of the tool + tool holder assembly “X” is 120
mm.
1. The graphic for this particular electro-spindle is that in section 11.5.6 .
2. Since there is no curve for “X”=120 mm, use the curve for the next higher value, i.e. the yellow
curve for “X”=130 mm.
3. Against the weight 3.5 kg read off the maximum no-load speed, which is 10000 rpm.
Page 58

______ HSD Technological equipment for Automation _______________________________________________________________________________________
5801H0017 Rev. 02 ______________________________________________________________________________________________________ 58/98
11.5.3 ES915 ISO30
0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 6
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
22000
24000
Kg
X = 50
X = 70
X = 90
X = 110
Page 59

______ HSD Technological equipment for Automation _______________________________________________________________________________________
5801H0017 Rev. 02 ______________________________________________________________________________________________________ 59/98
11.5.4 ES919 ISO30 Short Nose , ES919 L ISO30 Short Nose
0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 6
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
22000
24000
Kg
rpm
X = 50
X = 70
X = 90
X = 110
Page 60

______ HSD Technological equipment for Automation _______________________________________________________________________________________
5801H0017 Rev. 02 ______________________________________________________________________________________________________ 60/98
11.5.5 ES919 ISO30 Long Nose , ES919 L ISO30 Long Nose
0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 6
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
22000
24000
Kg
rpm
X = 50
X = 70
X = 90
X = 110
Page 61

______ HSD Technological equipment for Automation _______________________________________________________________________________________
5801H0017 Rev. 02 ______________________________________________________________________________________________________ 61/98
11.5.6 ES919 HSK F63 Short Nose , ES919 L HSK F63 Short Nose
0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 6
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
22000
24000
Kg
rpm
X = 70
X = 90
X = 110
X = 130
Page 62

______ HSD Technological equipment for Automation _______________________________________________________________________________________
5801H0017 Rev. 02 ______________________________________________________________________________________________________ 62/98
11.5.7 ES919 HSK F63 Long Nose , ES919 L HSK F63 Long Nose
0 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 6
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
22000
24000
Kg
rpm
X = 70
X = 90
X = 110
X = 130
Page 63

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 63/98
11.6 SENSOR FUNCTIONING
Note: The optional sensors (the “spindle shaft stopped” sensor S3
and the “front bearing temperature sensor”) are optionally
installed in ISO 30 and HSK F63 versions. They are both
described in detail in chapter § 13, where sensor “SC” for the
optional “C” axis is also described.
This section only describes the sensors present in the basic
configuration.
i
The technical specifications of the sensors described here are
given in section 7.7.4 .
Sensor output is delivered to the “signals connector” described
in sections 9.6.2 (ISO 30) and 9.6.3 (HSK F63).
11.6.1 ISO 30 versions
ISO 30 versions are fitted with two electro-spindle sensors. Sensors S1 and S2 perform the
functions described below.
S1
Detects correct locking of the tool holder. It is used to
provide the NC with a safety signal permitting spindle
rotation.
CONDITION
OUTPUT S1
Tool holder locked +24 V
No tool holder 0 V
Tool holder ejected
(collet open)
0 V
Always monitor S1 during electro-spindle rotation and stop
rotation if S1 drops to 0 Volt.
i
Ignore S1 from the moment the tool eject command is
given until the next tool locking command is given.
Page 64

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 64/98
S2
Important during tool changes. Detects ejection of the
tool holder, permitting the next phase in the tool change
cycle to take place.
CONDITION
OUTPUT S2
Tool holder locked 0 V
No tool holder 0 V
Tool holder ejected
(collet open)
+24 V
11.6.2 HSK F63 versions
HSK F63 versions are fitted with three electro-spindle sensors: S1, S2 and S4. S1 and S4 are
connected in series and provide a single output. S1, S2 and S4 perform the functions described
below.
S1 + S4
Wired in series to detect correct locking of the tool
holder. Their output is used to provide the NC with a
safety signal permitting spindle rotation.
CONDITION
OUTPUT <S1+S4>
Tool holder locked +24 V
No tool holder 0 V
Tool holder ejected
(collet open)
0 V
Always monitor the output from <S1+S4> during electrospindle rotation and stop rotation if it drops to 0 Volt.
i
Ignore <S1+S4> from the moment the tool eject command
is given until the next tool locking command is given.
Page 65

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 65/98
S2
Important during tool changes. Detects ejection of the
tool holder, permitting the next phase in the tool change
cycle to take place.
CONDITION
OUTPUT S2
Tool holder locked 0 V
No tool holder 0 V
Tool holder ejected
(collet open)
+24 V
11.7 THERMAL SWITCH
The electro-spindle is protected by two normally closed bi-metallic switches wired in series. These
protect the electro-spindle motor and cooling fan motor respectively.
They must be connected in series with the machine's safety stop system or inverter safety stop
system (see section 9.6.4 ).
The switches open if temperature reaches a potentially damaging level, tripping the machine's
safety stop system and stopping machining. They close again when temperature drops to normal
operating levels.
C
Power connector
(see section 9.6.4 )
S
Bi-metallic switches
M
Electro-spindle motor
F
Cooling fan
PE
Electrical protection W
C
3 ~
PIN 1
PE
F
M
S
PIN 8
PIN 9
PIN 3
PIN 6
PIN 4
PIN 7
PIN 2
PIN 5
S
Figure 11.3 Bi-metallic switch and motor wiring
i
The fan's thermal switch only detects fan motor overheating. It cannot detect that
the fan is prevented from turning, unless this causes overheating. For this
reason, check the condition of the fan regularly.
The fan must remain on at all times when the machine is active even if the
electro-spindle is not operating.
Page 66

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 66/98
§ 12 MAINTENANCE
Read this section carefully before attempting any maintenance on the electro-spindle. This section
contains information that is important for the safety of maintenance personnel and for the reliability
of maintenance work itself.
All applicable safety precautions must be taken whenever maintenance work is done on the
electro-spindle. In particular:
• Maintenance and/or lubrication must be performed only by qualified, expert personnel, with the
authorization of factory management, in compliance with applicable safety directives and
standards, and with the use of suitable tools and instruments.
• When performing maintenance, always wear suitable clothing such as tight fitting work overalls
and safety shoes. Never wear long or slack clothing or clothes with parts that hang loose.
• When performing maintenance on a machine, mark it clearly with panels stating “MACHINE
UNDERGOING MAINTENANCE”, and guard from unauthorized access.
During all maintenance work make sure that the electro-spindle is:
• disconnected and insulated from the electrical power supply;
• fully stopped (not still spinning).
Maintenance managers must ensure that their team is trained to ensure optimum co-ordination and
safety. All persons performing maintenance must remain fully visible to colleagues at all times so
that they can signal for assistance if necessary.
WARNING: USE ONLY SUITABLE LIFTING AND MOVING EQUIPMENT TO DISCONNECT OR
REMOVE HEAVY PARTS FROM THE MACHINE.
i
SPECIAL TOOLS ARE NOT NORMALLY REQUIRED FOR ELECTRO-SPINDLE MAINTENANCE.
Page 67

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 67/98
12.1 SCHEDULED MAINTENANCE
The following maintenance schedule must be followed scrupulously to keep the electro-spindle in
peak condition.
i
The frequency has been calculated taking into account an 8-hour a day, 5-dayworking
week, in a normal working environment.
12.1.1 Checking the cleanliness of the tool holder cone and of the spindle
shaft tool housing
DAILY
Always keep the conical surface of the tool holder (shown in black in Figure 12.1 and Figure 12.2)
and that of the housing in the spindle shaft (shown in black in Figure 12.3 and Figure 12.4) perfectly
clean and free from dust, grease, coolant, oil, metal shavings, and corrosion or lime scale. Check
these before you start to use the electro-spindle.
HSK VERSION ONLY: Make sure that the faces of the tool holder and spindle shaft (shown in
grey and identified by No. 2 in Figure 12.2 and Figure 12.4) are clean too.
ISO 30
2
1
HSK
HSK tool holder:
(1) Conical surface (in black)
Figure 12.1 Conical surface of an ISO 30 tool
holder (in black)
Figure 12.2
(2) Face (in grey)
Page 68

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 68/98
1 2
HSK tool holder housing
(1) Conical surface (in black)
Figure 12.3
Conical surface of ISO 30 spindle
shaft (in black)
Figure 12.4
(2) Face (in grey)
Clean these parts carefully at the end of every working day with a clean and soft cloth.
BLOWING COMPRESSED AIR INTO THE SPINDLE NOSE WHEN
THERE IS NO TOOL HOLDER IN PLACE CAN CAUSE DAMAGE (Figure
12.5).
O
!
Figure 12.5
Follow the instructions in section 12.1.1 to
clean the tool holder housing in the spindle
nose.
Page 69

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 69/98
DIRTY MATING SURFACES CAUSE AN UNCORRECT TOOL HOLDER
SEATING, WITH SERIOUS CONSEQUENCES FOR OPERATOR
SAFETY, ELECTRO-SPINDLE AND TOOL HOLDER WEAR, AND
MACHINING PRECISION.
USE A CLEAN AND SOFT CLOTH TO CLEAN THE CONICAL
SURFACES AND THE FACES SHOWN IN FIGURES FROM Figure 12.1
TO Figure 12.4. ABSOLUTELY NEVER USE ABRASIVE TOOLS OR
MATERIALS LIKE METAL BRUSHES, EMERY CLOTH, ACIDS AND
OTHER AGGRESSIVE CHEMICALS.
12.1.2 Cleaning the tool holder cone
EVERY TWO WEEKS
Clean carefully the conical surface of the tool holder (shown in black in Figure 12.1 and Figure
12.2) using a clean, soft cloth dipped in ethyl alcohol.
HSK VERSION ONLY: after cleaning by ethyl alcohol, spray the product KLÜBER LUSIN
PROTECT G 31, on the conical surface, and spread the product evenly using a clean, dry cloth.
12.1.3 Protecting the spindle shaft's conical housing
DAILY
DIRT MUST NOT BE ALLOWED TO ENTER THE CONE SEAT. CLOSE IT
WITH A SUITABLE PLUG OR A SPARE TOOL HOLDER.
AT THE END OF THE WORKING DAY, ALWAYS REMOVE THE TOOL
HOLDER FROM THE SPINDLE, TO PREVENT IT FROM STICKING.
PROTECT OR COVER THE SPINDLE NOSE AGAINST
CONTAMINATION.
Page 70

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 70/98
12.1.4 Lubricating HSK fingers
MONTHLY
To keep HSK type collets perfectly
efficient, grease them every month with:
METAFLUX-Fett-Paste Nr.70-8508
or:
METAFLUX-Moly-Spray Nr.70.82
Apply the grease into the gaps between
the collet sections as shown in Figure
12.6.
Figure 12.6 Monthly greasing of HSK fingers
TOO MUCH GREASE CAN CAUSE DAMAGE.
After you have applied the specified grease as shown in Figure 12.6, perform a number of tool
changes to distribute it evenly. Then remove the tool holder from the spindle shaft and wipe any
visible lumps of grease off with a clean cloth. Free standing grease can retain metal particles and
dirt from the machining, and foul the fingers, cone and faces. These parts must be kept as clean as
possible to ensure operator safety and machining precision and to reduce wear of the spindle and
tool holder cone.
ONLY USE THE GREASE LISTED ABOVE.
OTHER PRODUCTS ARE NOT COMPATIBLE WITH THE GREASE
INITIALLY APPLIED BY HSD.
IF INCOMPATIBLE GREASES ARE MIXED OR APPLIED TO THE SAME
FINGERS, THEY CAN REACT TO FORM SUBSTANCES THAT CAUSE
DAMAGE OR PREVENT CORRECT COLLET FUNCTIONING, WITH
SERIOUS CONSEQUENCES FOR OPERATOR SAFETY.
12.1.5 Bearings
NEVER
THE BEARINGS ARE LUBRICATED FOR LIFE AND DO NOT REQUIRE
GREASING.
Page 71

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 71/98
12.2 REPLACING PARTS
Parts must only be removed and replaced by qualified and authorized personnel.
RESIDUAL RISKS:
THE DRAW BAR SPRING IS PRE-LOADED WITH A FORCE
OF HUNDREDS OF KILOGRAMS. IN HSK MODELS IN
PARTICULAR THE DRAW BAR CAN BE VIOLENTLY
EXPELLED FROM THE UNIT, WITH SERIOUS RISK OF
INJURY, IF THE ELECTRO-SPINDLE IS DISASSEMBLED BY
UNTRAINED PERSONNEL.
PERFORM ONLY THE TASKS DESCRIBED IN THIS
MANUAL. FOLLOW THE INSTRUCTIONS SCRUPULOUSLY.
IN CASE OF DOUBT, CONTACT THE HSD TECHNICAL
ASSISTANCE SERVICE.
ALL DISASSEMBLY AND RE-ASSEMBLY OPERATIONS MUST BE PERFORMED
WITH:
ABSOLUTE CERTAINTY THAT THE MACHINE IS STOPPED, THE CONTROL
PANEL IS DISCONNECTED AT THE POWER SWITCH, AND THE SWITCH
LOCKED, WITH THE KEYS HELD BY THE MAINTENANCE MANAGER
ABSOLUTE CERTAINTY THAT THE TOOL IN THE ELECTRO-SPINDLE IS
STATIONARY
A WORKING ENVIRONMENT THAT IS EQUIPPED WITH ALL NECESSARY TOOLS
AND EQUIPMENT AND FREE FROM SOURCES OF POTENTIAL DANGER
THOROUGH CLEANLINESS OF THE PARTS BEING FITTED, WHICH MUST ALSO
BE EITHER DEGREASED OR LUBRICATED ACCORDING TO THEIR USE.
USE ONLY ORIGINAL HSD SPARE PARTS AND PERFORM ONLY THE
INSTRUCTIONS DESCRIBED IN THIS MANUAL. NO OTHER WORK ON THE
ELECTRO-SPINDLE IS PERMITTED AND WOULD INVALIDATE THE WARRANTY.
Page 72

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 72/98
12.2.1 Changing the spindle shaft kit
To replace the spindle shaft kit, follow the instructions given in the “Spindle Shaft Kit Replacement
Manual” (code HSD 5802H0001) that comes with the kit and can be ordered from the Technical
Assistance Service.
i
ONLY FOR UNITS WITH BELT DRIVEN C AXIS:
On models with belt driven C axis, the spindle shaft kit must be replaced by HSD
technical assistance. Replacement by the customer is not permitted.
Figure 12.7 ES919 HSK F63 Short Nose spindle shaft kit
Figure 12.8 ES919 HSK F63 Long Nose spindle shaft kit
Page 73

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 73/98
Figure 12.9 ES919 ISO 30 Short Nose spindle shaft kit
Figure 12.10 ES919 ISO 30 Long Nose spindle shaft kit
Figure 12.11 ES915 spindle shaft kit
Page 74

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 74/98
12.2.2 Replacing the cooling fan
1
Remove the four fixing screws
from the cooling fan unit.
2
Pull the fan unit off in the direction
shown by the arrow.
3
Disconnect the cooling fan's
electrical connector.
4
Connect up the connector of the
new cooling fan unit.
5
Push the earth cable of the new
cooling fan unit into the hole (5),
to ensure that it will be locked in
position by the screw fitted in the
next step (6).
6
Fit the new cooling fan unit and
secure it with the four fixing
screws, taking care to achieve an
efficient earth connection.
2
1
1
1
1
5
12.2.3 Replacing the tool change push-button
1
Remove the two screws from the
terminal block cover.
2
Remove the terminal block cover.
3
Disconnect the push-button cable.
4
Gently push the old button out
from inside the terminal block
while also pulling it from the
outside.
5
Fit the new push-button.
6
Connect up the push-button
cable.
7
Replace the cover on the terminal
block.
8
Fit and tighten the two cover
screws.
9
Check the functioning of the new
push-button.
IT IS STRICTLY FORBIDDEN TO CHANGE CABLES INSIDE THE TERMINAL BLOCK.
Page 75

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 75/98
12.2.4 Replacing sensors S1, S2, S3 and S4
12.2.4.1 Wiring of sensors in ISO 30 versions
S
1
PIN 4
PIN 6
S2
PIN 1
S3
PIN 3
PIN 2
3
1
2
Figure 12.12 Connection of sensors in ISO 30 electro-spindles to the pins of the signals connector (see
section 9.6.2 )
12.2.4.2 Wiring of sensors in HSK versions
S
1
S2
S
4
4
1
2
PIN 4
PIN 6
PIN 1
PIN 2
14
S3
3
PIN 3
PIN
Figure 12.13 Connection of sensors in HSK electro-spindles to the pins of the signals connector (see section
9.6.3 )
NOTE FOR HSK VERSIONS: The output to pin “14” must not be used for
machine control purposes, but only to identify which sensor in the <S1+S4> set is
faulty in case of malfunction, and to calibrate sensor S1 as instructed in sections
12.2.4.8 and 12.2.4.10 .
Page 76

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 76/98
12.2.4.3 Accessing the sensors
Figure 12.14
Figure 12.15
1
PAIR OF QUICK-FIT UNIONS
3
COVER OF SENSOR COMPARTMENT
2
SCREWS
4
SENSOR COMPARTMENT
• Disconnect the air hoses from the quick-fit unions 1, and turn the quick-fit unions to face the
nose of the spindle.
• Remove the screws 2 from the cover 3.
• Remove the cover 3 to access the sensor compartment 4, taking care not to damage the cover
seal.
12.2.4.4 Location of sensors
Figure 12.16 Identification of the sensors
34123
222
S1
S2
S4
S3
Page 77

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 77/98
12.2.4.5 The sensor assembly
The sensors are identified by a numbered cable tag. Take care not to mix up the
sensors. This could damage moving parts of the electro-spindle.
The sensors are pre-fitted in calibrated seats to enable them to be quickly fitted to the electrospindle at the correct depth.
For this reason always make absolutely sure what sensor you need to replace. The cables of the
sensors installed in the electro-spindle and of those provided as spares are all tagged with a
number ring to facilitate identification (Figure 12.17).
e
L
1
3
3
22
Figure 12.17 Sensor assembly Figure 12.18
1
Electrical connector
e
Adjustment eccentric
2
Cable number ring
4
Sensor
3
Calibrated seat and sensor
5
Sensor fixing bracket
L
Calibrated depth
6
Allen screw
12.2.4.6 Replacing a sensor assembly
Refer to figures Figure 12.17 and Figure 12.18, and proceed as follows to replace the sensors.
1. Remove screw (6) securing the bracket (5) of the sensor to be replaced (4).
2. Pull the faulty sensor out from its housing and disconnect its electrical connector (1).
3. Fit the replacement sensor in the housing and connect the electrical connector.
4. Replace bracket (5) and replace and tighten screw (6). Do not fully tighten yet. Leave it loose
enough to turn the sensor for calibration as described in sections 12.2.4.7 , 12.2.4.8 and
12.2.4.10 .
5. After you have calibrated the sensor, tighten the fixing screw to maintain the calibration setting.
Perform as many tests as possible using all available tool holders to verify the
effectiveness of the new sensor calibration.
Warning: Incorrect sensor calibration can lead to electro-spindle malfunctions.
i
When reading sections from 12.2.4.7 to 12.2.4.10 on sensor calibration, always
refer to the position numbers in Figure 12.17 and Figure 12.18.
456
Page 78

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 78/98
12.2.4.7 Calibrating sensors S1, S2, and S3 on ISO 30 electro-spindles
When you have replaced the sensor as instructed in section 12.2.4.6 , proceed as follows to
calibrate it.
1. Check whether the signal output from the sensor corresponds to that specified in section 11.6.1
in the table for the sensor you are calibrating. (See Figure 13.1 for sensor S3.)
2. If it does not, turn the sensor seat (4) until you obtain the output specified in the table for the
sensor you are calibrating. Hold the sensor in this position and tighten the fixing screw (6).
12.2.4.8 Calibrating sensors S1, S2, S3 and S4 on HSK F63 electro-spindles
i
A kit of gauges and shims is available to assist in calibrating HSK F63 sensors.
Their use is described in sections 12.2.4.9 and 12.2.4.10 .
The kit makes calibration not only quicker but more precise too. HSD strongly
recommends the use of this kit, given the importance that correct sensor calibration
has for machining safety.
12.2.4.8.1 Procedure for S1
When you have replaced the sensor as instructed in section 12.2.4.6 , proceed as follows to
calibrate it.
1. Check whether the signal output from sensor S1 corresponds to that specified in the table
below.
CONDITION OUTPUT
S1
Tool holder locked +24 V
No tool holder 0 V
Tool holder ejected
(collet open)
0 V
2. Turn the spindle shaft by hand and check whether the conditions in the table are fulfilled
throughout the 360° of a complete revolution.
3. If they are not, turn the sensor seat (4) until you obtain the output specified in the table. Hold
the sensor in this position and tighten the fixing screw (6).
12.2.4.8.2 Procedure for S2
A
B
A
Ejector X
B
Reference measurement X
Figure 12.19
When you have replaced the sensor as instructed in section 12.2.4.6 , proceed as follows to
calibrate it.
Page 79

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 79/98
1. Connect compressed air at 6/7 bar (85/100 PSI) to the electro-spindle's cylinder and set the
electro-spindle in a condition of “tool holder ejected (collet open)”.
2. Use a depth callipers as shown in Figure 12.19 to check whether distance (B) from the tip of
the ejector to the nose of the spindle at its maximum is 10.5 ± 0.1 mm. If it is not, do NOT
proceed but contact the HSD Customer Assistance Service.
3. Release the air from the cylinder. The ejector retracts, and (B) returns to its minimum value.
4. Use a pressure regulator to gradually increase pressure in the cylinder and extend the ejector.
5. Stop when distance (B) reaches 10.3 ± 0.1 mm.
6. If necessary, slacken off the fixing screw (6) for sensor S2.
7. Turn the seat (4) of sensor S2 until the sensor gives a “high” signal (24V) with (B) = 10.3 ±
0.1 mm and a “low” signal (0V) with (B) < 10.3 ± 0.1 mm. Hold the sensor seat firmly in this
position.
8. Turn the spindle shaft by hand and check that when (B) = 10.3 ± 0.1 mm the output from S2 is
“high” (24V) and “low” (0V) when (B) < 10.3 ± 0.1 mm through 360° of a complete revolution.
9. Tighten the screw (6) to secure the sensor fixing bracket (5).
10. Perform as many tests as possible using all available tool holders to verify the effectiveness of
the new sensor calibration.
Contact the HSD Customer Assistance Service if distance (B) is not 10.3 ± 0.1 mm
when you feed compressed air at 6/7 bar (85/100 PSI) into the cylinder.
12.2.4.8.3 Procedure for S3
When you have replaced the sensor as instructed in section 12.2.4.6 , proceed as follows to
calibrate it.
1. Check whether the signal output from the sensor corresponds to that illustrated in figure 13.1.
2. If it does not, turn the sensor seat (4) until you obtain the output specified in the table. Hold the
sensor in this position and tighten the fixing screw (6).
12.2.4.8.4 Procedure for S4
When you have replaced the sensor as instructed in section 12.2.4.6 , calibrate it as follows.
1. Place shims first of thickness 0.12 mm or 0.16 mm between the faces of the tool holder cone
and the spindle shaft as shown in Figure 12.20 in accordance with the table below.
2. Fit and lock the tool holder cone in the spindle shaft and check whether the signal output from
sensor S4 corresponds to that specified in the table below.
CONDITION SHIM IN PLACE OUTPUT S4
Tool holder locked 0.12 mm HIGH (+24V)
Tool holder locked 0.16 mm LOW (0V)
Tool holder ejected
(collet open)
- LOW (0V)
Figure 12.20
3. Turn the spindle shaft by hand and check whether the conditions in the table are fulfilled
throughout the 360° of a complete revolution.
4. If they are not, turn the sensor seat (4) until you obtain the output specified in the table. Hold
the sensor in this position and tighten the fixing screw (6).
5. Perform as many tests as possible using all available tool holders to verify the effectiveness of
the new sensor calibration.
Page 80

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 80/98
12.2.4.9 Gauge and shim kit for calibrating S1 and S4 sensors on HSK F63
electro-spindles (HSD code 3811H0110)
A
Shim for calibrating sensor S1 (0.04 mm)
B
Shim for calibrating sensor S4 (0.12 mm)
C
Shim for calibrating sensor S4 (0.16 mm)
D
Gauge for calibrating sensor S1 (14.29 mm)
E
Gauge for calibrating sensor S4 (14.13 mm)
Figure 12.21 Gauge and shim kit for sensors on F63 electro-spindles, HSD 3811H0110
A gauge and shim kit, HSD code 3811H0110, is available for calibrating the sensors on HSK F63
electro-spindles.
This kit allows you to set HSK collets at exactly the right position for sensor calibration. This makes
calibration a lot quicker and more precise too. The gauges are manufactured to far greater
precision than standard tool holders.
It is possible to calibrate the sensors without this kit, proceeding as described in section 12.2.4.8 .
HSD nevertheless strongly recommends the use of it, given the importance that correct sensor
calibration has for machining safety.
The gauges and shims shown in Figure 12.21 have their size punched on them or marked on the
label of the bag containing them.
12.2.4.10 Calibrating sensors S1 and S4 on F63 HSK electro-spindles using
the 3811H0110 kit
Figure 12.22 Using the gauge as a tool holder,
with or without shims (Figure
12.23) according to the table in
sections 12.2.4.10.1 and
12.2.4.10.2
Figure 12.23 Placing a shim between the
faces of the gauge and spindle
shaft
Page 81

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 81/98
12.2.4.10.1 Procedure for S1
When you have replaced the sensor as instructed in section 12.2.4.6 , calibrate it as follows.
1. Use the 14.29 mm gauge and the 0.04 mm shim as shown in Figure 12.22 and Figure 12.23,
and check whether the output signal from sensor S1 corresponds to the following table.
CONDITION SHIM IN PLACE OUTPUT S1
Gauge locked
(tool holder locked)
YES
HIGH (+24V)
Gauge locked
(tool holder locked)
NO
LOW (0V)
No gauge
(no tool holder)
-
LOW (0V)
Collet open
(tool holder ejected)
-
LOW (0V)
2. Turn the spindle shaft by hand and check whether the conditions in the table are fulfilled
through 360° of a complete revolution.
3. If they are not, turn the sensor seat (4) until you obtain the output specified in the table. Hold
the sensor in this position and tighten the fixing screw (6).
4. Perform as many tests as possible using all available tool holders to verify the effectiveness of
the new sensor calibration.
12.2.4.10.2 Procedure for S4
When you have replaced the sensor as instructed in section 12.2.4.6 , calibrate it as follows.
1. Use the 14.13 mm gauge and the 0.12 mm and 0.16 mm shims as shown in Figure 12.22 and
Figure 12.23, and check whether the output signal from sensor S4 corresponds to the following
table.
CONDITION SHIM IN PLACE OUTPUT S1
Gauge locked
(tool holder locked)
0.12 mm HIGH (+24V)
Gauge locked
(tool holder locked)
0.16 mm LOW (0V)
Collet open
(tool holder ejected)
- LOW (0V)
2. Turn the spindle shaft by hand and check whether the conditions in the table are fulfilled
through 360° of a complete revolution.
3. If they are not, turn the sensor seat (4) until you obtain the output specified in the table. Hold
the sensor in this position and tighten the fixing screw (6).
4. Perform as many tests as possible using all available tool holders to verify the effectiveness of
the new sensor calibration.
Page 82

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 82/98
12.2.5 Replacing the cylinder assembly
1
Open the sensor compartment as instructed
in section 12.2.4.3 .
2
Disconnect all the electrical connectors.
3
IMPORTANT:
Before you disconnect hoses A and D
(see step 4 below) tag them or mark
them with adhesive tape, so that you
can recognize which is which in the
rest of the procedure.
A
Compressed air line for optional
functions
B
Quick-fit union
C
Quick-fit union with pressure
regulator
D
Compressed air line for internal
pressurization
E
Compressed air inlet for cone
cleaning and pressurization
4
5
• Clearly mark hoses A and D as instructed
in step 3.
• Disconnect hoses A and D from unions B
and C.
• Remove the two fixing screws from block
G.
• Remove block G taking care not to lose or
damage the seals.
• Remove the four screws F.
• Remove the cooling fan cover in the
direction shown by the arrow.
A
D
B C
E
G
F
Page 83

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 83/98
6
Remove only the six screws shown to
release the cylinder.
7
Fit the new cylinder using the six screws
removed in step 6.
C
Quick-fit union with pressure
regulator
D
Compressed air line internal
pressurization
E
Compressed air inlet for cone
cleaning and pressurization
H
Connection hose
M
Pressure gauge
8
C
Quick-fit union with pressure
regulator
N
Adjuster
P
Lock nut
9
• Fit a pressure gauge M as shown in step
8 to measure the outlet pressure from
union C.
• Connect an air supply at 4 bar (58 PSI) to
E.
• Turn adjuster N until the pressure on the
gauge reads 0.8 bar (11.6 PSI).
• Tighten lock nut P to lock the adjustment.
• Disconnect the pressure gauge M and
hoses D and H from union C.
N
P
C
D
C
E
M
H
Page 84

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 84/98
10
• Block G must be removed to re-fit the
cooling fan cover.
• Remove the two fixing screws from block
G.
• Remove block G taking care not to lose or
damage the seals.
• Fit the cooling fan cover and secure with
screws F.
• Fit block G again, taking care to seat the
seals correctly, and tighten the two fixing
screws.
• Reconnect hoses A and D to quick-fit
unions B and C respectively (see the
figure for step 4).
• Connect the cooling fan’s electrical
connector.
11
Follow the instructions in section 12.2.4 to:
• remove the sensors from the old cylinder;
• fit them on the new cylinder;
• calibrate the sensors;
• Close the sensor compartment.
12
• Use an M6 Allen key to remove the
EXTERNAL compressed air unions (pos.
8, Figure 6.3) from the old cylinder and fit
them to the new cylinder.
CALIBRATE THE SENSORS AFTER THE CYLINDER ASSEMBLY HAS BEEN REPLACED.
G
F
Page 85

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 85/98
§ 13 ACCESSORIES AND OPTIONS
BEFORE STARTING ANY WORK ON THE ELECTRO-SPINDLE, READ AND
FOLLOW ALL THE SAFETY PRECAUTIONS AND MAINTENANCE SAFETY
WARNINGS.
SEE IN PARTICULAR CHAPTER § 5 AND PAGES 66 AND 71 OF CHAPTER § 12.
On request, the electro-spindle can be fitted with the following accessories and options:
1. "Spindle shaft stopped" sensor S3 (See section 13.1 )
2. Bearing temperature sensor (See section 13.2 )
3. Belt driven C axis (See section 13.3 )
4. Gear driven C axis (See section 13.3 )
5. Forced air cooling (See section 13.4 )
13.1 "SPINDLE SHAFT STOPPED" SENSOR S3
The “SPINDLE SHAFT STOPPED” sensor outputs two “ON” and two “OFF” pulses per shaft
revolution. It remains permanently “ON” at high speeds.
+ 24 V
0 V
0
giri
rev
1
Figure 13.1 Output from sensor S3
See section 7.7.4 for the sensor's electrical specifications.
See section 12.2.4 to install and calibrate the sensor. Make sure that output is as specified in
Figure 13.1.
i
Ignore the output of S3 during tool changes.
13.2 BEARING TEMPERATURE SENSOR
A temperature sensor (PT 1000 type) can be fitted to the electro-spindle to detect high bearing
temperatures.
The sensor can be connected to any numeric controller capable of interfacing with a temperature
sensitive resistance (analog input).
1
Seat for sensor hole
(Pos. 4 in Figure 13.3)
2
Electrical connector
Figure 13.2
Page 86

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 86/98
13.2.1 Installing the bearing temperature sensor
Figure 13.3
3
Electrical connector for bearing temperature
sensor (in shrink wrapped protective sheath)
4
Sensor hole with protective cover secured by
two screws
5
Connector for sensor SC of the gear driven C
axis (optional C axis)
Take care not to mix up connector 3 with connector 5.
• Remove the cover fixing screws and remove the cover from the temperature sensor hole 4.
• Fit the seat 1 in the hole 4.
• Fix the sensor in place with the two screws previously removed from the cover.
• Remove the shrink wrapped sheath from connector 3.
• Connect connector 2 to connector 3.
13.2.2 Characteristic curve of the temperature sensor referred to 1 mA
Resistance in Ohms
0
250
500
750
1000
1250
1500
1750
2000
2250
2500
-60
-40
-20020406080100
120
140
160
Temperature in °C
Resistance +/- 2% (Ohm)
815 886 961 1000 1040 1122 1208 1299 1392 1490 1591 1696
Temperature +/- 5% (°C) 0 10 20 25 30 40 50 60 70 80 90 100
Temperature +/- 5% (°F) 32 50 68 77 86 104 122 140 158 176 194 212
Page 87

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 87/98
13.3 “C” AXIS UNIT
ES919 and ES915 variants can be fitted with a C Axis unit.
The C axis unit rotates heads, gearboxes etc. fixed to the electro-spindle through 360° on the
assembly plane by means of a quick lock device and specially shaped drive pin.
Rotational movement is powered by a servomotor, rigidly mounted in line with a low-backlash
epicyclic gearbox.
A PNP, NC inductive sensor, “SC”, provides a zero position reference signal and allows the
assembly to be positioned quickly and accurately for tool release into the tool magazine.
C axis units can be Gear driven or Belt driven. Gear driven C axis units are available as separate
optionals for all “Short Nose” and “Long Nose” variants. Belt driven C axis units are not available
as separate optionals, but come pre-fitted, and only to ES919 ISO30 (7 kW or 8 kW version, 2
poles) Short Nose variants.
Choice of the C axis servomotor is left to the customer. The mounting flanges for Belt driven C axis
units are shown in section 7.6.2 .
i
All parts of the C axis are lubricated for life and are maintenance free.
13.3.1 Belt driven “C” axis unit
i
For the overall dimensions and technical specifications of belt driven
C axis unit, see section 7.6 .
13.3.2 Gear driven “C” axis unit
Helical gears with automatic backlash elimination.
For installation instructions and technical specifications, see the manual delivered with the unit or
available from the HSD Technical Assistance Service (code HSD 5801H0019).
Main specifications for a servomotor giving 0.64 Nm at 3000 rpm (*)
Rated torque
67 Nm (*)
Starting torque
105 Nm (*)
Overall gear ratio
1 / 123
Total mechanical efficiency
0,85
Epicyclic gear backlash
3’
Positioning precision
5’
Gearbox input rpm
3000 rpm (4000 rpm max)
Rated gearbox input torque
2.5 Nm
Starting gearbox input torque
4 Nm
Weight
10 Kg (without servomotor)
(*) Specifications depend on the choice of servomotor.
Page 88

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 88/98
13.3.3 SC sensor for the belt driven “C” axis unit
Sensor type: PNP proximity; NC (Normally Closed)
Voltage 10 - 30 V (DC)
Maximum load 200 mA
No-load consumption < 10 mA
Rated read distance 0.8 mm
The C axis unit comes complete with a PNP NC (Normally Closed) inductive sensor designated
SC.
The closing of the sensor contacts signals the zero reference position and allows the assembly to
be positioned quickly and accurately for tool release into the tool magazine.
The zero position is the position at which the hole for the shaped drive pin aligns with sensor SC,
as shown in the detail inside the white circle in Figure 13.4.
CONDITION STATE OF CONTACTS
Zero position Closed
All other positions Open
Figure 13.4 The zero reference position
Page 89

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 89/98
13.3.4 Replacing and calibrating the SC sensor in belt drive versions
BEFORE STARTING ANY WORK ON THE ELECTRO-SPINDLE, READ AND
FOLLOW ALL THE SAFETY PRECAUTIONS AND MAINTENANCE SAFETY
WARNINGS.
SEE IN PARTICULAR CHAPTER § 5 AND PAGES 66 AND 71 OF CHAPTER § 12.
1.
• Turn the C axis to any position other than the zero
reference position, i.e. to any position other than that
shown in Figure 13.4.
• Disconnect the electro-spindle from the electrical supply.
• Remove the eight fixing screws and remove the cover
from the body of the C axis unit (see figure on the right).
• Disconnect the sensor's electrical connector, which is
located in the point shown by the arrow in the figure on
the right (see also position 5 of Figure 6.3 in chapter § 6).
2.
• Cut the cable of the faulty sensor to facilitate removal.
• Remove the two screws fixing the sensor block to the
cover (figure on the right).
3.
• Insert the new sensor in the hole shown by the arrow in
the figure on the right.
Page 90

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 90/98
4.
• Apply some Loctite 243 or equivalent medium strength
thread locking compound to the threads of the sensor.
• Screw the sensor into the side of the sensor block with
the largest hole.
• Screw the sensor in until you achieve the protrusion
shown in the figure on the right.
• Wait for the thread locking compound to set in
compliance with the manufacturer's instructions.
5.
• Fit the assembled sensor + sensor block to the cover
(figure on the right), but leave the screws loose enough
for the sensor block to move.
6.
• Apply silicon sealant to the sensor cable hole.
• Check that the C axis unit is still in a position other than
the zero position, i.e. that the drive pin hole is not in the
position shown in Figure 13.4. Turn the C axis unit if
necessary.
• Fit the cover back on the body of the C axis unit. Fit and
tighten all the fixing screws (figure on the right).
7.
• Adjust the sensor read distance using either
“PROCEDURE_A” or “PROCEDURE_B”:
PROCEDURE A
• Place a shim of 0.2 mm between the pulley and the
sensor.
• Push the sensor against the pulley and into firm contact
with the shim.
• Tighten the two sensor block fixing screws.
• Remove the shim.
PROCEDURE B
• Push the sensor against the pulley and check that the
sensor contacts are open.
• Slowly slide the sensor away from the pulley until the
contacts close.
• Slowly slide the sensor towards the pulley again until the
contacts just open.
• Tighten the two sensor block fixing screws.
8.
• Re-connect the electro-spindle's electrical connections.
• Turn the C axis unit, and check that the contacts of
sensor SC remain closed at all positions other than zero
position (see Figure 13.4) when they must open.
• Check sensor functioning at as many axis positions as
practical.
0,2
Page 91

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 91/98
13.4 FORCED AIR COOLING
The electro-spindle can be cooled by compressed air instead of by the cooling fan.
Compressed air is delivered to a distribution flange, pre-fitted by HSD or retro-fitted as a kit.
This cooling solution reduces the overall length of the electro-spindle by 5 cm and dispenses with
the need to maintain a gap (10 cm) behind the fan. Compressed air cooling therefore reduces the
electro-spindle's overall space requirement by 15 cm (Figure 13.5).
A
50
100
B
Figure 13.5
A
Four cooling fan fixing screws
External hose Ø: 8 mm
Pressure: 6 / 7 bar – 85 / 100 PSI
B
Cooling
air inlet
Consumption: 4 cfm referred to 1 Atm, 68°F
(7000 normal litres/hour)
i
The stated values for air consumption and inlet pressure are for the S1 duty type
described in the tables in chapter § 7. If the unit is used with lighter duty types, the user
can evaluate whether to reduce air consumption by lowering the inlet pressure.
13.4.1 Installing the forced air cooling kit
BEFORE STARTING ANY WORK ON THE ELECTRO-SPINDLE, READ AND
FOLLOW ALL THE SAFETY PRECAUTIONS AND MAINTENANCE SAFETY
WARNINGS.
SEE IN PARTICULAR CHAPTER § 5 AND PAGES 66 AND 71 OF CHAPTER § 12.
1. Remove the fixing screws and pull the fan unit off the electro-spindle (see section 12.2.1 ).
2. Disconnect the cooling fan's electrical connector and fit the bridge connector provided.
3. Fit the air distribution flange in the place of the cooling fan unit and secure it with the four
screws removed from the fan unit.
4. Connect the compressed air supply to the quick-fit union (B) on the air distribution flange.
Page 92

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 92/98
§ 14 TROUBLE SHOOTING
BEFORE STARTING ANY WORK ON THE ELECTRO-SPINDLE, READ AND
FOLLOW ALL THE SAFETY PRECAUTIONS AND MAINTENANCE SAFETY
WARNINGS.
PROBLEM PROBABLE CAUSE CORRECTIVE ACTION
There is no power
• Check the mains power
supply.
• Check all power terminals.
• Check all electrical cables and
connections for breaks.
No tool holder is fitted Fit a tool holder.
The tool holder not correctly
seated
See “The tool holder is not
locked” below.
The thermal switch has tripped
Wait for the electro-spindle to cool
down and the thermal switch will
automatically reset.
If the thermal switch trips
frequently, see “The electro-
spindle overheats” below.
The inverter switch has tripped
Consult the inverter's own manual
or contact the inverter
manufacturer.
On electro-spindles with
configurable power terminals
only: see section 9.6.6 and check
that the power terminals are
configured correctly for the mains
power rating.
Sensor S1 (ISO 30) or sensor
series <S1+S4> (HSK) is
disconnected or faulty
• Check the sensor connectors.
• Check the sensor cables for
breaks.
• Calibrate the sensors as
instructed in section 12.2.4 .
• Replace any faulty sensors as
instructed in section 12.2.4 .
The electro-spindle does
not turn
There is no electro-spindle
enabling signal
Consult the manuals or contact
the manufacturers of the
machine, numeric controller, and
inverter.
Page 93

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 93/98
There is dirt or foreign
bodies between the tool
holder and the spindle
shaft housing
Remove any large foreign bodies
and clean the tool holder cone and
spindle housing as instructed in
section 12.1.2 .
The tool holder cone is not
of the right type
Choose a tool holder as instructed
in sections 11.4.1 (ISO 30), 11.4.2
(HSK) and 11.4.3 (all).
There is insufficient air
pressure to open the collet
• Check the air pressure settings
in accordance with section 9.4
• Check the compressed air
system for leaks and pressure
losses.
The electro-spindle is not
aligned with the tool holder
magazine
Consult the machine's own manual
or contact the machine
manufacturer.
Sensor S2 is disconnected
or faulty
• Check the sensor connectors.
• Check the sensor cables for
breaks.
• Calibrate the sensors as
instructed in section 12.2.4 .
• Replace any faulty sensors as
instructed in section 12.2.4 .
The tool holder is not locked
There is a control error
Consult the machine's own manual
or contact the machine
manufacturer.
There is insufficient air
pressure
• Check the air pressure settings
in accordance with section 9.4
• Check the compressed air
system for leaks and pressure
losses.
The tool holder is not ejected
There is no ejection
enabling signal
Consult the manuals or contact the
manufacturers of the machine,
numeric controller, and inverter.
There is no air pressure
inside the electro-spindle
There is insufficient air
pressure or the
compressed air system is
faulty
• Check the air pressure settings
in accordance with section 9.4
.
• Check the compressed air
system for leaks and pressure
losses.
• Contact the HSD Technical
Assistance Service.
One of the sensors does not
give the required output
A sensor is disconnected
or faulty
• Check the sensor connectors.
• Check the sensor cables for
breaks.
• Calibrate the sensors as
instructed in section 12.2.4 .
• Replace any faulty sensors as
instructed in section 12.2.4 .
Page 94

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 94/98
The cooling fan is not working
properly
• Check that the cooling fan is
working.
• Check the cooling fan for
damage.
• Check that nothing is
preventing the fan from
turning.
• If the fan unit itself is faulty,
replace it as instructed in
section 12.2.2 .
The air channels through the
electro-spindle body are
blocked
• Remove the cooling fan as
instructed in section 12.2.2 .
• Inspect and clear the air
channels through the electrospindle body.
• Re-fit the cooling fan.
The machining is taking up too
much power
Reduce the machining power
requirements.
The inverter setup is incorrect
Check the specifications for your
model of electro-spindle on its
data label and in section § 7.
The power supply voltage is
incorrect
Check the voltage requirements
on the electro-spindle's data
label.
The electro-spindle
overheats
For models with configurable
power terminals only: the
connections at the configurable
power terminals are incorrect
See section 9.6.6 and check that
the power terminals are
configured correctly for the mains
power rating.
Excessive current
absorption
For models with configurable
power terminals only: the
connections at the configurable
power terminals are incorrect
See section 9.6.6 and check that
the power terminals are
configured correctly for the mains
power rating.
For models with configurable
power terminals only: the
connections at the configurable
power terminals are incorrect
See section 9.6.6 and check that
the power terminals are
configured correctly for the mains
power rating.
The inverter setup is incorrect
Check the specifications for your
model of electro-spindle on its
data label and in section § 7.
Performance below
specifications
The power supply voltage is
incorrect
Check the power supply voltage
requirements on the electrospindle's data label.
Page 95

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 95/98
The tool holder is not balanced
Choose a tool holder in
accordance with sections 11.4.1
(ISO 30), 11.4.2 (HSK) and
11.4.3 (all).
The tool is not balanced
Choose a tool in accordance
with sections 11.4.4 and 11.5 .
There is dirt or foreign bodies
between the tool holder and the
spindle shaft housing
Remove any large foreign
bodies and clean the tool holder
cone and spindle housing as
instructed in section 12.1.2 .
The inverter setup is incorrect
Check the specifications for your
model of electro-spindle on its
data label and in section § 7.
The machining is taking up too
much power
Reduce the machining power
requirements.
The fixing bolts are loose Tighten the fixing bolts.
The electro-spindle vibrates
The bearings are worn or
damaged
Replace the spindle shaft kit.
The bearings are noisy
The bearings are worn or
damaged
Replace the spindle shaft kit.
Page 96

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 96/98
§ 15 SPARE PARTS LIST
HSD CODE
DESCRIPTION
KS915INC
ES915 ISO 30 Short Nose spindle shaft kit
Version K+C: CRONIDUR or CHROMEX front bearings – Ceramic rear bearings
Version C+C: Ceramic front and rear bearings
Version C+A: Ceramic front bearings – steel rear bearings
Version A+A: Steel front and rear bearings
KS919INC
ES919 ISO 30 Short Nose spindle shaft kit
Version K+C: CRONIDUR or CHROMEX front bearings – Ceramic rear bearings
Version C+C: Ceramic front and rear bearings
Version C+A: Ceramic front bearings – steel rear bearings
Version A+A: Steel front and rear bearings
KS919INL
ES919 ISO 30 :Long Nose spindle shaft kit
Version K+C: CRONIDUR or CHROMEX front bearings – Ceramic rear bearings
Version C+C: Ceramic front and rear bearings
Version C+A: Ceramic front bearings – steel rear bearings
Version A+A: Steel front and rear bearings
KS919HNC
ES919 HSK F63 Short Nose spindle shaft kit
Version K+C: CRONIDUR or CHROMEX front bearings – Ceramic rear bearings
Version C+C: Ceramic front and rear bearings
Version C+A: Ceramic front bearings – steel rear bearings
Version A+A: Steel front and rear bearings
KS919HNL
ES919 HSK F63 Long Nose spindle shaft kit
Version K+C: CRONIDUR or CHROMEX front bearings – Ceramic rear bearings
Version C+C: Ceramic front and rear bearings
Version C+A: Ceramic front bearings – steel rear bearings
Version A+A: Steel front and rear bearings
6202H0011A
Cylinder assembly for : ES915 ISO30 , ES919 ISO30 , ES919 L ISO30
6202H0016A
Cylinder assembly for : ES919 HSK F63 , ES919 L HSK F63
5664H0001
Sensor S1
5664H0002
Sensor S2
5664H0006
Sensor S3
5664H0016
Sensor S4
5664H0024
Sensor SC (Belt driven “C” axis)
5664H0003
Temperature sensor for front bearings
6390H0001
Forced air cooling kit
5661H0001
Cooling fan kit (complete with basic cover and protective cover)
5618H0001
Push-button
6200H0045
“Signal + Power” cable connector
6200H0046
“ Power” cable connector
Page 97

______HSD Technological equipment for Automation _____________________________________
5801H0017 Rev. 02 _________________________________________________________ 97/98
§ 16 DISPOSING OF THE ELECTRO-SPINDLE
RESIDUAL RISKS:
THE DRAW BAR SPRING IS PRE-LOADED WITH A FORCE
OF HUNDREDS OF KILOGRAMS: IN HSK MODELS IN
PARTICULAR THE DRAW BAR CAN BE VIOLENTLY
EXPELLED FROM THE UNIT, WITH SERIOUS RISK OF
INJURY, IF THE ELECTRO-SPINDLE IS DISASSEMBLED BY
UNTRAINED PERSONNEL.
TAKE GREAT CARE AND IN CASE OF DOUBT, CONTACT
THE HSD TECHNICAL ASSISTANCE SERVICE.
At the end of the electro-spindle's working life it is the customer’s responsibility to dispose of it
correctly.
First of all, clean the unit and separate the various components into mechanical and electrical
parts. Then separate the component parts according to type of material: electric motors (copper
windings), metal parts (body, etc.), plastic parts, etc.. Dispose of the various materials in
compliance with the laws and regulations applicable in the country where the electro-spindle has
been installed.
Page 98

______HSD Technological equipment for Automation ____________________________________
5801H0017 Rev. 02 _________________________________________________________ 98/98
HSD S.p.a.
TECHNOLOGICAL EQUIPMENT FOR AUTOMATION
ï==ï==ï===K===Ü==ë==Ç==J==Ü==á==í==É==Å===K===Å==ç==ã
ï==ï==ï===K===Ü==ë==Ç==J==Ü==á==í==É==Å===K===Å==ç==ãï==ï==ï===K===Ü==ë==Ç==J==Ü==á==í==É==Å===K===Å==ç==ã
ï==ï==ï===K===Ü==ë==Ç==J==Ü==á==í==É==Å===K===Å==ç==ã
Via della Meccanica 16
61100 PESARO (ITALIA)
Loc. Chiusa di Ginestreto
UFFICIO COMMERCIALE / SALES DEPT.
Tel. (+39)0721.439.612
Fax (+39)0721.441.606
E-mail hsd.sales@hsd.it
SERVIZIO ASSISTENZA CLIENTI /
/ CUSTOMER CARE ASSISTANCE
Tel. (+39)0721.439.638
Fax (+39)0721.441.606
E-mail hsd.service@hsd.it
HSD Deutschland
HSD DeutschlandHSD Deutschland
HSD Deutschland GmbH
Brückenstrasse 2
D-73333 Gingen
Tel. +49(0)7162 / 9323436
Fax +49(0)7162 / 9323439
E-mail sales@hsddeutschland.de
HSD USA
HSD USAHSD USA
HSD USA Inc.
3764 SW, 30th Avenue
Hollywood, Florida 33312 USA
Phone no. (+1) 954 587 1991
Fax (+1) 954 587 8338
E-mail info@hsdusa.com
www.hsdusa.com
 Loading...
Loading...