

Page 1

数字罗盘解决方案
HMR3400
霍尼韦尔HMR3400是专门为航海和精确指南应用而设计的一种数字罗盘解决方
案。霍尼韦尔的磁阻传感器技术连同一个MEMS加速度计,可以提供一个微型、
可靠的倾斜补偿电子罗盘。HMR3400使用从数字罗盘解决方案HMR3300继承而来
的一套标准指令,HMR3400的设计可以使其很容易通过一个常规的5V供电电源和
一个UART串行数据接口与主系统集成。
霍尼韦尔通过引入创新型的固态磁传感器解决方案,从而保证提供产品的优良品
质。正如所承诺的,这些都是具有高度可靠性、最佳性能的产品。霍尼韦尔的磁
传感器产品能够为您提供最真实可靠的解决方案,值得信赖。
特点 优点
► 紧凑解决方案,封装在一个0.6×1.5英寸的印刷
电路板(PCB)上
► 高精度罗盘
► 倾斜补偿
► 低成本
► 可以采用带式和盘式包装
► -40°至+85°C运行温度范围
► 8Hz持续数据刷新速率
► 硬铁补偿功能
► 0.5°重复性精度
尺寸窄小、体积小,适用于紧密安装条件和最小布局的限制
►
► ±1°水平航向精度
► 使用一个MEMS加速度计,可以达到±60°的俯仰和侧滚角
► 大批量、商业OEM(原始设备制造商)设计
► 大批量OEM装配
► 适用于消费者和工业环境
► 快速航向计算,应用于指南
► 用户驱动的零漏磁场的校准。
► 保持一致性的磁阻传感器
北京华信昊通科技有限公司 地址:北京市石景山区杨庄东路126号星宇大厦520
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Page 2
技术规格
参数 条件
标准值 最大值 单位
Honeywell
最小值
航向角
俯仰和侧滚
磁场
电气
精度 水平
0° 至 ±30°
±30°至 ±60°
分辨率 0.1 度
滞后 0.2 0.4 度
重复性 0.2 0.4 度
1.0
3.0
4.0
度 RMS
范围 俯仰和侧滚范围 ±60 度
精度 0° 至 ± 30°
± 30°至 ± 60
零精度* 水平
-20°至 +70°C 热滞后
-40° 至 +85°C 热滞后
分辨率 0.1 度
滞后 0.2 度
重复性 0.2 度
0.4
1.0
0.4
1.0
5.0
0.5
1.2
度
范围 最大磁通量密度 ± 2 高斯
分辨率 0.1 0.5 毫高斯
度
输入电压 外部调整 4.8 5.0 5.2 直流电压
电流 在5.0伏直流电压条件下 15 24 毫安
数字接口
物理
环境
为了达到最佳性能,必需在使用HMR3400前进行零位调整,并经历运行温度限定范围之外的温度暴露
*
UART ASCII (1 启动, 8 数据, 1 停止, 0奇偶)
用户可选择波特率
数据刷新率 持续/选通/平均 8 赫兹
连接器 印制板插座(4-接点) 或 PTH 4 引脚
2400 - 19200 波特
尺寸 电路板集成 0.6 x 1.5 英寸
重量 HMR3300 3.75 克
温度 工作
贮存
-20
-55
-
-
+70
+125
。
毫安
北京华信昊通科技有限公司 地址:北京市石景山区杨庄东路126号星宇大厦520
2
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Page 3
Honeywell
引脚配置
引脚编号 引脚名称 描述
1 GND
2 RXD
3 TXD
4 +5VDC
基础(微型)设备操作
HMR3400数字罗盘解决方案包括所有基本(微型)传感器和电子元件,以此提供罗盘航向角的数字显示。HMR3400使用三个
磁传感器,外加一个MEMS加速度计,可以提供相对于电路板水平(平直)位置的倾斜(俯仰和侧滚)传感。
HMR3400电路板开始于霍尼韦尔HMC1022 and HMC1021Z磁传感器,提供地球磁场的X、Y和Z轴磁传感。由一个恒流电源
为这些传感器供电,以保持所有温度条件下的最佳精确性。传感器输出电压和恒定电流传感器供电电压都提供给多路模拟数
字转换器 (ADC) 集成电路。一个微控制器集成电路定期访问多路模拟数字转换器 (ADC),同时执行偏移校正和航向角计
算。该微控制器还可以执行外部串行数据接口和其他内务处理功能,例如,例行校正功能。为了使性能最优化,可以采用一
个随车携带的EEPROM(电可擦可编程只读存储器)集成电路来保存必需的数据变量。
从±2g加速计中发送的一对附加的数据输入由微控制器接收。将这些倾斜输入数据(俯仰和侧滚)添加到传感器数据输入中,
从而形成一个完整的数据组,用于航向的三维计算。
HMR3400电路的供电电源规定为+5V,允许用户直接提供规定的供电电压,从而最小化印刷电路板的尺寸。供电电源分配
系统是一个双接地(模拟和数字)系统,用以控制内部噪音和最大化测量精度。
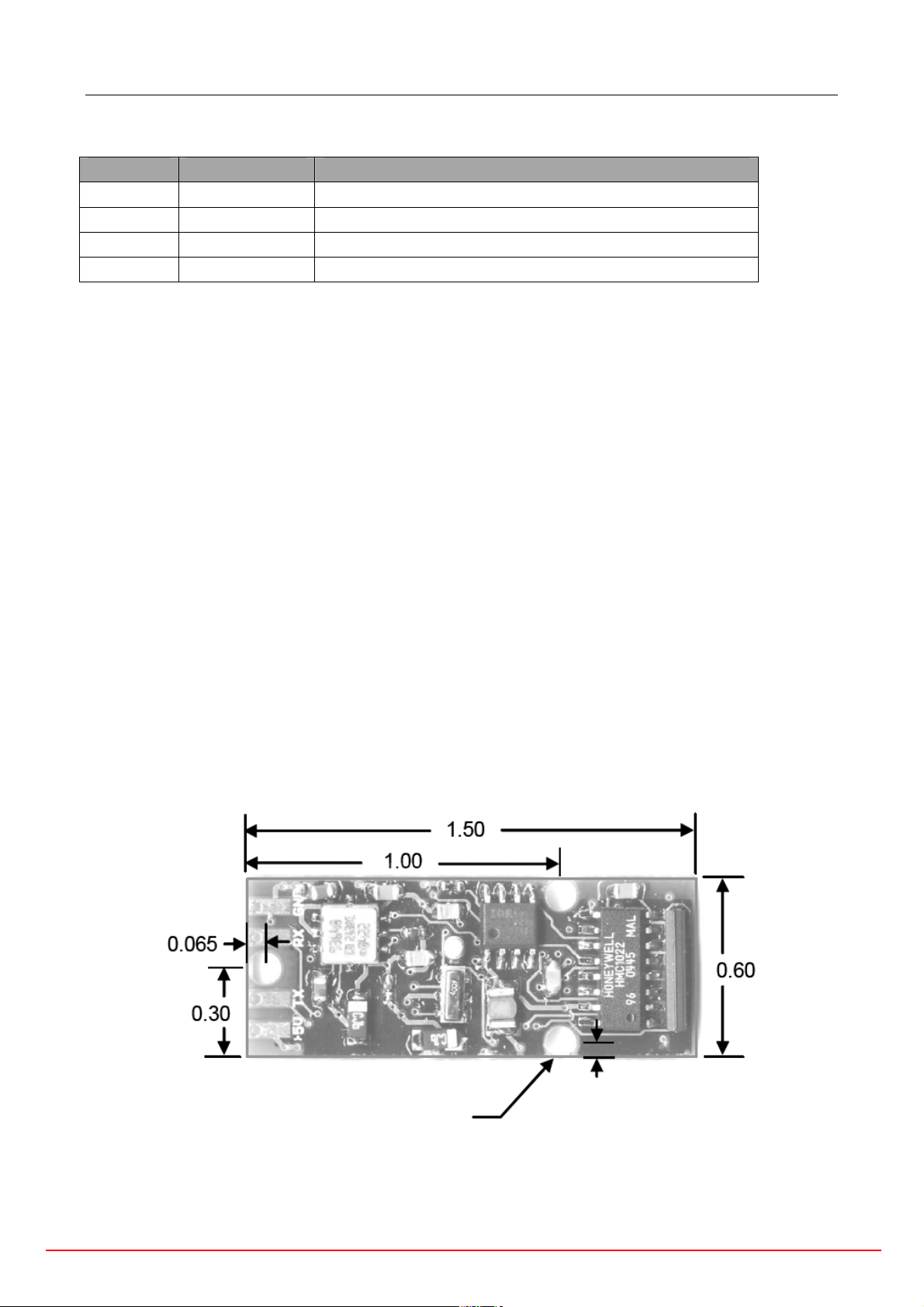
物理性能
HMR3400数字罗盘解决方案电路板的尺寸大约为0.6× 1.5 英寸,一个4-引脚插头可以任意地连接在印制板插座通孔上,从而
固定用户接口。图1显示了典型电路板的尺寸。
单位:英寸 0.055(2处)
北京华信昊通科技有限公司 地址:北京市石景山区杨庄东路126号星宇大厦520
电源/信号接地
UART接收数据/ SPI数据输出
UART发送数据/ SPI数据输入
+5 VDC 常规电源输入
直径0.076 (3处)
3
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
图1
Page 4

Honeywell
安装事项
下面是HMR3400推荐使用的印刷电路板(PCB)的图样。提供的三个小安装孔是为了在机械上支撑HMR3400安装在主印刷电
路板或底座上。要达到的目标是支撑部件与最终产品的正面和侧面保持水平和平行。
HMC1021Z元件是一个8-引脚 SIP装置,它是以一个与水平基准电路板几乎完全垂直的方位装运的。不要弯曲或者重新配置
该元件,否则工厂磁校正将失效。如果该元件意外地发生扭曲,那么回复到重新校正是可能的或者将该元件垂直校准以重新
获得大部分的测量精确性。纠正罗盘模块平直方位是使引脚向下指向。
电路描述
HMR3400数字罗盘解决方案包括所有基本传感器和电子元件输出航向角的数字显示。HMR3400使用三个磁传感器和一个加
速度计,用以提供相对于电路板水平(平直)位置的倾斜(俯仰和侧滚)传感。HMR3400是基HMR3300产品基线由生而来,
并且在供电电源的大小和灵活性方面进行了压缩。
HMR3400电路开始于霍尼韦尔HMC1021Z和HMC1022的单轴和双轴磁阻传感器,可以提供X,Y和Z轴地球磁场的磁传感。
HMC1022提供附属磁场的水平感应部件(X和Y轴),HMC1021Z提供垂直(Z轴)轴传感元件,最终提供正交的笛卡尔量值。由
一个恒流电源为这些传感器供电,以保持所有温度条件下的最佳精确性。传感器输出电压和恒定电流传感器供电电压都提供
给多路模拟数字转换器(ADC)集成电路。一个微控制器集成电路定期访问多路模拟数字转换器(ADC),同时执行偏移校正和
计算航向角。该微控制器还可以执行外部串行数据接口和其他内务处理功能,例如,例行校正功能。为了使性能最佳化,可
以采用一个随车携带的EEPROM电可擦可编程只读存储器)集成电路来保存必需的数据变量。
从±2g加速度计(模拟装置ADXL213)中发送的一对附加的数据输入由微控制器接收。将这些倾斜输入数据(俯仰和侧滚)添
加到传感器数据输入中,从而形成一个完整的数据组,用于航向的三维计算。如果电路板保持水平,则俯仰和侧滚角为零,
并且由X和Y轴传感器输入决定航向角计算等式。当电路板保持倾斜时, Z轴磁传感器再加上加速度计的俯仰和侧滚角的值
输入到航向角计算等式中。
HMR3400电路的供电电源设计成常规的+5V电源供给。供电电源分配系统是一个双接地(模拟和数字)系统,用以控制内
部噪音和最大化测量精度。
应用说明
何时校正
HMR3400附带一个可选的用户硬铁校正程序,用以清除普通强度硬铁的磁场畸变。对于净化器磁场环境的用户来说,工厂
校正比用户校正更好,并将使读数更精确。
校正程序并不是可以应付各种磁场环境的万灵药。如果一个指针罗盘脱离了正确读数,那么很有可能HMR3400的精确性能
也将表现很差。大多数罗盘的误差来源是因为黑色金属(刚、铁、镍、钴等)放置在太过靠近罗盘的位置,这通常被称为软
铁产生软铁磁场畸变。软铁磁场畸变将改变其附近任何罗盘磁场的强度和方向,即使是校正程序也不能消除这些通量浓度和
弯曲误差。一条非常好的经验法则就是保持软铁远离罗盘至少两个最大尺寸。例如,一个半英寸长的不锈钢钉头螺栓应该放
置在远离HMC1021Z和HMC1022传感器至少一英寸的位置。
其他难以应付的磁场环境就是人为制造的,由邻近电动机和高强度电流导体产生的交流和直流磁场。这些磁场如
话,
也应该需要罗盘或电源重新布局。有时候,如果屏蔽材料非常薄并且远离罗盘,黑色金属可能起到屏蔽作用。
硬铁磁场畸变可以进行校正,它由软铁组成。这些软铁已经磁化,并产生残留(离散)的磁通量。典型的硬铁磁场畸变通常
来源于大型车辆底盘零部件和发动机组,它们可能拥有高达±2高斯的磁场强度。将罗盘放置在远离硬铁和软铁的位置这是
保持测量精度的第一道防线,然后通过校正程序排除硬铁的剩余影响。
果可能的
北京华信昊通科技有限公司 地址:北京市石景山区杨庄东路126号星宇大厦520
4
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Page 5

Honeywell
校正程序
对于HMR3400而言,在一个水平面上旋转一整圈就是将XY传感器暴露于所有方位以计算校正偏移量的起点。因为罗盘以一
个每秒8个样本的速度收集数据,那么每旋转1°采集一个样本将是一个不错的准则。如果缓慢旋转不可能的话,那么多圈快
速旋转就是一个不错的替代选择。当前校正的品质或者硬铁的数量通过检查校正程序完成后的Xof,Yof和Zof值得到。在已
知的整洁的磁场环境中,这些偏移变量的水平值(XY =水平,YZ =向上)应小于±200 ADC计数。将这些Xof,Yof和Zof值重新
设置为零,可以使罗盘回复到工厂校准状态。
对于HMR3400而言,上面所描述的水平旋转可以校正XY轴,但是应该通过一个完整周旋转,及在应用程序容许的范围内尽
可能多的俯仰和侧滚变量来校正Z轴。如果只能获得适当的俯仰和侧滚变量值,那么完成水平旋转、启动校正程序,并强行
将Zof值设置成零。在该归零过程中可能会损失一定的精确性,但是适度倾斜很有可能永远不会导致严重的倾斜补偿航向角
误差。
UART通信协议
HMR3400模块用ASCII码(用*或者#符号作为起始字节)进行通信。数据位格式:1起始位、8数据位、1停止位,无奇偶校
验位。工厂设置的默认波特率为19,200。异步通信有一套完整的指令。同步通信受到限制,只能使用直接航向查询指令,除
此之外的其它指令都不能使用。
通电/重置
罗盘需要一个供电电压通电转换硬件,作为内部硬件重置和计时开始的按钮。有些基准供电电源可以创造一个软起动条件,
所以HMR3400如果不重置的话,可能无法起作用。为了避免软起动,样机研究时可能需要一个串联的供电电源开关(机械的
或者电气的)。
在电源启动或者执行重置指令后,HMR3400将以一个大约800毫秒的初始化程序运行,设置随车携带的硬件、获得EEPROM
(电可擦可编程只读存储器)变量,并在控制器RAM(随机存取存储器)单元遮蔽这些变量。
初始状态输出
初始化程序一结束,HMR3400将立即开始发送ASCII码。文本的首行将是罗盘的型号和内部固件修订版号。第二个响应字符
串将发送,首字符为# ,而不是N,W或者A字符。#N响应值表示工作正常,当然也是我们期望从HMR3200中得到的相应值。
#W和#A响应值表示低温警告,及警报已经拉响。当用户为了获得最佳的倾斜补偿性能和最精确的倾斜显示,重新校准MEMS
加速度计而发送俯仰和侧滚重调零指令时,这些响应值将复位至正常值。
初始化后,罗盘自动开始以8Hz的频率流注航向或磁强计输出数据。用户必须发送一个开始或停止的指令(*S) 才能退出持续
流注数据,并使控制器全力集中在执行下一个指令。
北京华信昊通科技有限公司地址:北京市石景山区杨庄东路126号星宇大厦520
5
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Page 6

运行命令
语法: *X<cr><lf> 发送操作模式更改的命令。*前缀表示命令类型。
#I响应表示发送了一个无效命令。
航向输出命令
*H<cr><lf>
选择航向输出模式(工厂设置的默认值)。该配置保存在非易失性内存中。所有数据都以十进制等级表示。
响应格式:航向、俯仰、侧滚<cr><lf>
例如: 123.4;18.6;-0.5<cr><lf>
磁强计输出命令
*M<cr><lf>
选择磁强计输出命令。该配置保存在非易失性内存中。所有数据都是带有正负号的十进制数值,其中包括用户校正偏
移值。
响应格式: 磁X, 磁Y, 磁Z<cr><lf>
例如:1256;-234;-1894<cr><lf>
开始和停止数据输出
*S<cr><lf>
每次该命令发送时,数据输出在开始和停止之间转换(工厂设置的默认值是开始,首次发送开始/停止命令将停止数
据输出)。持续数据流控制。大多数命令需要罗盘处于停止状态,这样才可以使控制其在瞬间执行要求的命令。
查询输出
*Q<cr><lf>
在当前选定模式(磁力计/航向)下查询单一输出响应字符串。*Q命令只在停止数据输出模式下才被允许。查询命令
允许用户通过请求每个响应字符串来减慢数据流的传输
侧滚轴重调零
*O<cr><lf>
允许用户将侧滚输出调零。该命令只有当侧滚轴水平(±0.3°)时才能发送。收到命令后清除警报或提醒状态。
俯仰轴重调零
*P<cr><lf>
允许用户将俯仰输出清零。该命令应该只有当俯仰轴水平(±0.3°)时才能使用。收到命令后清除警报或提醒状态。
北京华信昊通科技有限公司地址:北京市石景山区杨庄东路126号星宇大厦520
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Honeywell
6
Page 7

Honeywell
平均输出
*A<cr><lf>
除了其数据是20个读数的平均值之外,与查询命令结果相同,*A命令只在停止数据输出模式中才被允许使用。只有在
20个读数全部累积产生时,命令响应才会出现。
分割过滤器切换
*F<cr><lf>
该命令切换配置状态字节中的分割过滤器位。参数设置即刻保存在EEPROM(电可擦可编程只读存储器)中,但不在
RAM(随机存取存储器)中备份。需要动力循环或激活一个重置命令(*R)。一个置位表示系统过滤器只是拉平了加速
计数据(倾斜过滤器),而且目前磁性过滤器在拉平磁传感器数据方面起着积极的作用。一个经清除的过滤器位对倾斜和
磁性数据恢复执行相同的拉平过程。
重置
*R<cr><lf>
将罗盘复位至通电状态。一个一秒钟初始化程序启动,同时上载EEPROM(电可擦可编程只读存储器)数据(非易失性
内存)到RAM(随机存取存储器)。在初始化和状态输出后,持续数据流传输开始。
用户校正
*C<cr><lf>
发送本命令进入和退出校正模式。一旦进入校正模式,设备将发送一个或多个磁强计数据字符串,附加 “C”字符,表
示校正模式运行。
例如:123,834,1489,C<cr><lf>
参看本数据表中前端内容中的校正程序说明。在校正活动结束时,发布另一个*C<cr><lf> 命令,退出校正模式。
配置命令
语法: #Dev=±xxxx<cr><lf> 设置参数值
#Dev?<cr><lf> 查询参数值
偏差输入(磁偏角纠正)
#Var=±nnnn<cr><lf> 当偏差是± nnn.n 度时
设置磁北和真北之间的磁偏角。计算的磁北航向角减去磁偏角就能计算出真北航向角。数值的标准变化范围是±25°区
间。例如:纽约的磁偏角为-14°,而洛杉矶的磁偏角为+14°。
.
例如:#Var=-203<cr><lf> 将磁偏角设置为 –20.3°。
例如:#Var=?<cr><lf> 将磁偏角返回至 –20.3°
北京华信昊通科技有限公司地址:北京市石景山区杨庄东路126号星宇大厦520
7
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Page 8

Honeywell
偏差输入(平台角纠正)
#Dev=±nnnn<cr><lf> 当角度为± nnn.n 度时
设置或者返回罗盘前向和安装平台正向之间的角度。从预计的航向角中扣减偏移角来抵补机械偏心度。
例如: #Dev=23<cr><lf> 将磁偏角设置为+2.3°
例如: #Dev=?<cr><lf> 将磁偏角回复至 +2.3°
用户磁偏移值(X, Y和Z)
#Xof, #Yof, #Zof
设置或返回每个磁轴的用户偏移置。这些数值在经过校正程序后重新计算。同样可以插入固定偏移距来纠正已知的磁
移。数值是模拟数字转换器计数。
例如: #Xof=+47<cr><lf> 设置 x 偏移值为+47。
例如: #Xof=?<cr><lf> 返回 x 偏移值; +47。
波特率
#Bau
设置罗盘发送和接收波特率。19200,9600,4800和2400这几个数值是唯一允许设置的数值。波特率不能查询,并被发
送到EEPROM(电可擦可编程只读存储器)以修改当前设置。工厂设置的默认值为19200。
例如:#XBau=9600<cr><lf> 在下一个重置命令或动力循环后,将波特率设置为9600。
系统过滤器
#SFL
设置和读取系统IIR过滤器设定值。当分割过滤器被清除时,该参数值将变成磁性和倾斜过滤器的默认值。当分割过滤
器被设置时,SFL参数设置将只能控制倾斜过滤器值。参数输入即刻保存在EEPROM(电可擦可编程只读存储器)中。
要求动力循环或者一个重置命令使之生效。分割过滤器位的设置可以通过#CON?命令查询。在0和255之间的数值是有
效的,而工厂设置的默认值为3。在高度机械振动的环境下则是增加过滤值的一个充分理由。
例如: #SFL=6<cr><lf> 设置系统过滤器值为6。
磁性过滤器
#MFL
MFL命令设置和读取磁性过滤器设置值。当分割过滤器被清除时,该参数值将默认为SFL的值。当分割过滤器被设置
时,MFL参数设置将只能控制磁性过滤器值。参数输入即刻保存在EEPROM中。参数输入即刻保存在EEPROM中。要
求动力循环或者一个复位命令变得有效。在0和255之间的数值是有效的,而工厂设置默认缺省值为3。在邻近导体或发
动机产生交流磁场的情况下则是增加过滤值的一个充分理由。
例如: #SFL=0<cr><lf> 将磁性过滤器的值设置为0(没有过滤作用)。
北京华信昊通科技有限公司地址:北京市石景山区杨庄东路126号星宇大厦520
8
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
Page 9

Honeywell
配置
#CON?
该指令询问罗盘模块的配置状态。配置值是二字节配置状态以十进制计数方法输出(以ASCII 格式) 。16-位二进制模式
定义如下:
位 15 位 14
无 无 无 无 无 SplitFilter Alarm Warn
位 7 位 6
无 无 1 无 H Out 无 Mag Out 无
参数名 据报告的比特值 作用
Mag Out 1 选择的磁传感器的输出语句 (X, Y, Z)
H Out 1 选择的航向输出语句 (H, P, R)
Warn 1 运行过程中设备温度下降到-10°C以下,低温后将俯仰和侧滚值重新调零。
Alarm 1 运行过程中设备温度下降到-20°C以下,低温后将俯仰和侧滚值重新调零。
SplitFilter 1 使用独立的磁场和倾斜过滤器值
例如: #CON? 返回一个响应 #D=2088<cr><lf>意味着磁场和倾斜数据使用相同过滤器(按10位清除),同时罗盘模
块发送航向角数据(3位数组)。
命令响应
这些是罗盘模块产生的对主处理机发出的命令作出的响应。这些响应遵循所发出命令的格式。
#Dxxx<cr><lf>
按要求返回十进制格式的数值型数据。
#I<cr><lf>
无效命令响应。对任何无效命令作出响应。
订购须知
位 13
位 5
订货号 产品
HMR3400
位 12
位 4
位 11
位 3
数字罗盘解决方案
位 10
位 2
位 9
位 1
位 8
位 0
Honeywell/Commercial Switch&Sensor
北京华信昊通科技有限公司地址:北京市石景山区杨庄东路126号星宇大厦520
霍尼韦尔商业开关与传感器
9
Tel:010-51620429 51620428 e-mail:13911707235@139.com http://www.cgs-tech.com/
 Loading...
Loading...