


HT45R36
C/R-F
盛群知识产权政策
盛群知识产权政策
盛群知识产权政策盛群知识产权政策
专利权
专利权
专利权专利权
盛群半导体公司在全球各地区已核准和申请中之专利权至少有 160 件以上,享有绝对之合法权益。与盛群
公司 MCU 或其它产品有关的专利权并未被同意授权使用,任何经由不当手段侵害盛群公司专利权之公司、
组织或个人,盛群将采取一切可能的法律行动,遏止侵权者不当的侵权行为,并追讨盛群公司因侵权行为
所受之损失、或侵权者所得之不法利益。
商标
商标权权权权
商标商标
盛群之名称和标识、Holtek 标识、HT-IDE、HT-ICE、Marvel Speech、 Music Micro、 Adlib Micro、 Magic
Voice、 Green Dialer、 PagerPro、 Q-Voice、 Turbo Voice、 EasyVoice和 HandyWriter
司在台湾地区和其它国家的注册商标。
著作权
著作权
著作权著作权
Copyright 2007 by HOLTEK SEMICONDUCTOR INC.
型八位
型八位
型八位型八位
OTP
都是盛群半导体公
单片机
单片机
单片机单片机
规格书中所出现的信息在出版当时相信是正确的,然而盛群对于规格内容的使用不负责任。文中提到的应
用其目的仅仅是用来做说明,盛群不保证或不表示这些应用没有更深入的修改就能适用,也不推荐它的产
品使用在会由于故障或其它原因可能会对人身造成危害的地方。盛群产品不授权使用于救生、维生器件或
系统中做为关键器件。盛群拥有不事先通知而修改产品的权利,对于最新的信息,请参考我们的网址
http://www.holtek.com.tw; http://www.holtek.com.cn
Rev. 1.00 1 2006-09-28

技术相关信息
技术相关信息
技术相关信息技术相关信息
· 工具信息
·
FAQs
· 应用范例
特性
特性
特性特性
HT45R36
• 工作电压:
f
=4MHz:2.2V~5.5V
SYS
f
=8MHz:3.3V~5.5V
SYS
• 25 个双向输入/输出口
个与输入/输出口共用引脚的外部中断输入
• 2
• 8 位可编程定时/计数器 ,具有溢出中断和 7 级
预分频器
• 外部 RC 振荡转换电路
• 内置晶体和 RC 振荡电路
• 看门狗定时器
• 16
• 2048×14 程序存储器 ROM
通道电容/电阻型传感器输入
• 120×8 数据存储器 RAM
• HALT 和唤醒功能可降低功耗
• 在 V
=5V,系统频率为 8MHz 时,指令周期
DD
为 0.5µs
指令执行时间为1或2个指令周期
•
• 查表指令,表格内容字长 14 位
• 4 层硬件堆栈
• 位操作指令
• 63 条指令
• 低电压复位功能
• 44/52-pin QFP
封装
概述
概述
概述概述
HT45R36 是 8 位高性能精简指令集单片机,专门为经济型多输入输出控制的产品而设计。
低功耗、灵活的 I/O 功能、计数器、振荡类型选择、暂停和唤醒功能、以及看门狗定时器功能,使此
款多功能芯片可以广泛地应用于工业控制、消费类产品、子系统控制器等。
Rev. 1.00 2 2006-09-28

方框图
方框图
方框图方框图
P r o g r a m
R O M
P r o g r a m
C o u n t e r
S T A C K 0
S T A C K 1
P A 0 / I N T 0
P A 1 / I N T 1
I n t e r r u p t
C i r c u i t
I N T C
T M R C
T M R
HT45R36
M
P r e s c a l e r
U
X
S y s t e m C l o c k
P A 2 / T M R
I n s t r u c t i o n
R e g i s t e r
I n s t r u c t i o n
D e c o d e r
T i m i n g
G e n e r a t o r
O S C 2 O S C 1
R E S
V D D
V D D B
V S S
V S S C
M P
A L U
S h i f t e r
A C C
M U X
W D T S
M
D a t a
U
M e m o r y
X
S t a t u s
W D T P r e s c a l e r
P A C
P O R T A
P A
P B C
P O R T B
P B
P O R T C
P C C
P C
P D C
P O R T D
P D
T i m e r A
T i m e r B
A n a l o g
S w i t c h
R C
O s c i l l a t i o n
W D T
M
U
X
R C O s c i l l a t i o n O u t p u t
R C 1 ~ R C 1 6
R C O U T
I N
R R E F
C R E F
M
U
X
P A 0 / I N T 0
P A 1 / I N T 1
P A 2 / T M R
P A 3 ~ P A 7
P B 0 ~ P B 7
P C 0 ~ P C 7
P D 0
S y s t e m C l o c k
S y s t e m C l o c k / 4
S y s t e m C l o c k / 4
R C O S C
引脚图
引脚图
引脚图引脚图
V D D B
P A 2 / T M R
P A 1 / I N T 1
P A 4
P A 3
P A 5
1
P A 6
2
P A 7
3
P B 0
4
P B 1
5
P B 2
6
P B 3
7
8
9
P B 4
1 0
P B 5
1 1
P B 6
1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 2 0 2 1 2 2
P C 2
P C 1
P C 0
P B 7
P A 0 / I N T 0
R E S
H T 4 5 R 3 6
4 4 Q F P - B
V S S C
P C 3
P A 2 / T M R
P A 1 / I N T 1
O S C 1
O S C 2
R C 1 2
V D D
V S S
3 83 94 04 14 24 34 4
P C 4
3 43 53 63 7
R C 1 1
3 3
R C 1 0
3 2
R C 9
3 1
R C 8
3 0
R C 7
2 9
R C 6
2 8
R C 5
2 7
R C 4
2 6
R C 3
2 5
R C 2
2 4
R C 1
2 3
R C O U T
I N
R R E F
C R E F
V D D B
P A 4
1
P A 5
2
P A 6
3
P A 7
4
P B 0
5
P B 1
6
P B 2
7
P B 3
8
9
P B 4
1 0
P B 5
1 1
P B 6
1 2
P B 7
1 3
P C 0
1 4 1 5 1 6 1 7 1 8 1 9 2 0 2 1 2 2
P C 1
P A 0 / I N T 0
O S C 1
O S C 2
R C 1 6
R C 1 5
V S S
2 3 2 4 2 5 2 6
I N
R R E F
C R E F
R C 1 4
4 04 14 24 34 44 54 64 7
3 9
R C 1 3
3 8
R C 1 2
3 7
R C 1 1
3 6
R C 1 0
3 5
R C 9
3 4
R C 8
3 3
R C 7
3 2
R C 6
3 1
R C 5
R C 4
3 0
2 9
R C 3
R C 2
2 8
2 7
R C 1
R C O U T
V D D
P C 3
4 84 95 05 15 2
P C 4
V S S C
R E S
H T 4 5 R 3 6
5 2 Q F P - A
P C 7
P C 6
P C 5
P D 0
P A 3
P C 2
Rev. 1.00 3 2006-09-28
引脚说明
引脚说明
引脚说明引脚说明
引脚名称
引脚名称 输入
引脚名称引脚名称
PA0/INT0
PA1/INT1
PA2/TMR
PA3~PA7
PB0~PB7
PC0~PC7
PD0
RC1~RC16
RCOUT
IN
RREF
CREF
RES
VSS
VSSC
VDD
ADDB
OSC1
OSC2
注意:所有上拉电阻均由掩膜选项控制。
输入/输出
输出 掩膜选项
输入输入
输出输出
输入/输出
输入/输出 上拉电阻
输入/输出 上拉电阻
输入/输出 上拉电阻
输入 — 电容或电阻连接引脚。
输入
输入
输出 — 参考电阻连接引脚。
输出 — 参考电容连接引脚。
输入 — 斯密特触发复位输入,低电平有效。
— — 负电源,接地。
—
— — 正电源。
— — PB 端口正电源。
输入
输出
掩膜选项 说明
掩膜选项掩膜选项
上拉电阻
唤醒功能
—
—
—
PC
晶体或 RC
说明
说明说明
8 位双向输入/输出口。每一位可由掩模选项设置为唤醒输
入。可由软件设置为
上拉电阻选项决定:位选择)的斯密特触发输入。
INT0 和 INT1 分别与 PA0 和 PA1 引脚共用。掩膜选项决
定中断是否使能,中断是上升沿还是下降沿触发。TMR
与 PA2 引脚共用。
8 位双向输入/输出口。可由软件设置为 CMOS 输出、带
或不带上拉电阻(由上拉电阻选项决定:端口选择)的斯
密特触发输入。
8 位双向输入/输出口。可由软件设置为 CMOS 输出、带
或不带上拉电阻(由上拉电阻选项决定:端口选择)的斯
密特触发输入。
1 位双向输入/输出口。可由软件设置为 CMOS 输出、带
或不带上拉电阻的斯密特触发输入。
电容或电阻连接引脚到
振荡器输入引脚。
端口负电源,接地。
OSC1、OSC2 连接 RC 或晶体(由掩膜选项确定)以产生内
部系统时钟。在 RC 振荡方式下,OSC2 是系统时钟四分
频的输出口。
CMOS
输出、带或不带上拉电阻(由
RC OSC。
HT45R36
极限参数
极限参数
极限参数极限参数
电源供应电压
端口输入电压………….VSS-0.3V~VDD+0.3V 工作温度………..….-40℃~85℃
IOL总电流…………. ………. ……….300mA IOH总电流…………. …. -200mA
总消耗电流………. ………. ……….500mW
注:这里只强调额定功率,超过极限参数所规定的范围将对芯片造成损害,无法预期芯片在上述标示范围外的工作状态,而
且若长期在标示范围外的条件下工作,可能影响芯片的可靠性。
………….VSS-0.3V~VSS+6.0V
储存温度
………….-50℃~125℃
Rev. 1.00 4 2006-09-28
HT45R36
RES
RES
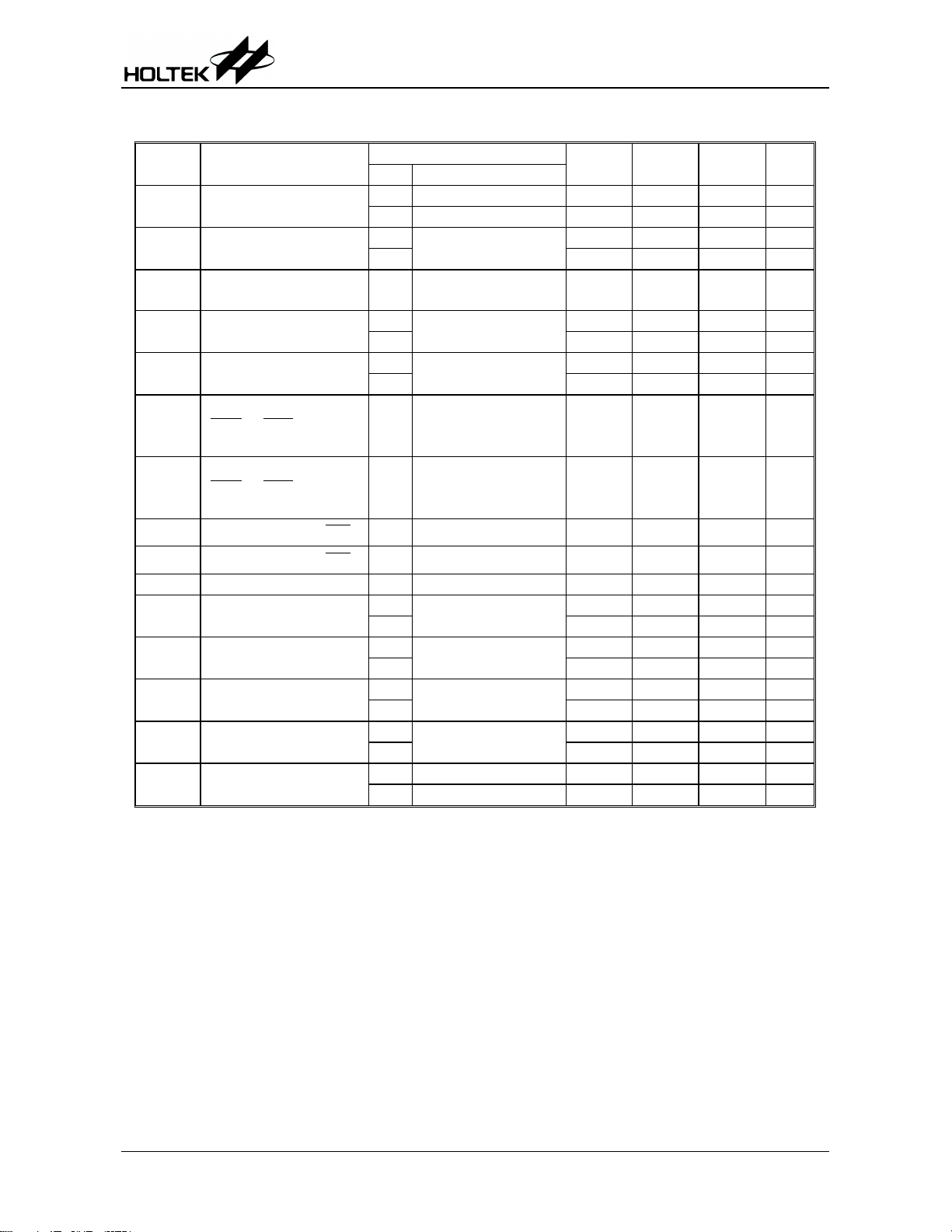
直流电气特性
直流电气特性
直流电气特性直流电气特性
测试条件
测试条件
符号
符号 参数
符号符号
VDD
I
DD1
I
DD2
I
STB1
I
STB2
工作电压
工作电流
(晶体振荡、RC 振荡)
工作电流
(晶体振荡、RC 振荡)
静态电流
(看门狗打开)
静态电流
(看门狗关闭)
参数
参数参数
V
DD
—
—
3V
5V
5V
3V
5V
3V
5V
测试条件测试条件
条件
条件
条件条件
f
=4MHz 2.2
SYS
f
=8MHz 3.3
SYS
无负载,f
无负载,
无负载,系统
f
SYS
SYS
=4MHz
=8MHz
HALT
无负载,系统 HALT
最小
最小 典型
最小最小
典型 最大
典型典型
—
—
—
—
—
1 2 mA
3 5 mA
2.5 4 mA
— —
— —
—
—
— —
输入/输出口、TMR、
V
IL1
INT0和INT1
的低电平
— —
0
—
输入电压
输入/输出口、TMR、
V
IH1
INT0和INT1
的高电平
— —
0.7V
DD
—
输入电压
V
IL2
V
IH2
V
LVR
I
OL1
I
OH1
I
OL2
I
OH2
RPH
低电平输入电压(
高电平输入电压(
低电压复位 — LVR 使能
PA、PB、PD0、RREF
和 CREF 灌电流
PA、PB、PD0、RREF
和 CREF 源电流
灌电流
PC
PB 源电流
上拉电阻
— —
)
— —
)
3V
5V
3V
5V
3V
5V
3V
5V
3V
5V
VOL=0.1VDD
VOH=0.9VDD
VOL=0.1VDD
VOH=0.9VDD
—
—
0
0.9 V
DD
—
—
2.7 3.0 3.3 V
4 8
10 20
-2 -4
-5 -10
8 16
20 40
-4 -8
-10 -20
20 60 100
10 30 50
Ta=25℃℃℃℃
最大 单位
最大最大
单位
单位单位
5.5 V
5.5 V
5 µA
10 µA
1 µA
2 µA
0.3 V
DD
VDD V
0.4 V
DD
VDD V
—
—
—
—
—
—
—
—
V
V
mA
mA
mA
mA
mA
mA
mA
mA
kΩ
kΩ
Rev. 1.00 5 2006-09-28
HT45R36
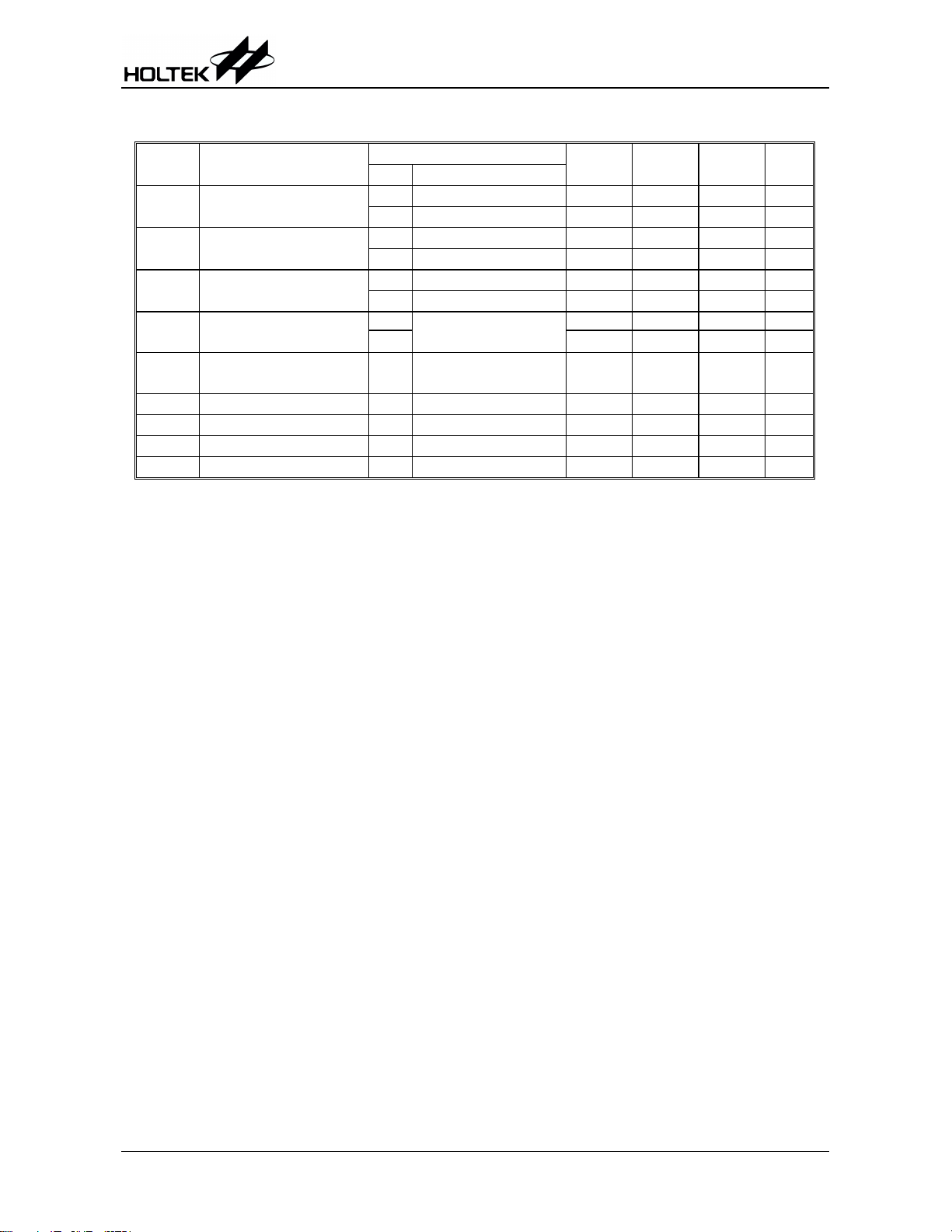
交流电气特性
交流电气特性
交流电气特性交流电气特性
测试条件
测试条件
符号
符号 参数
符号符号
f
SYS
f
TIMER
t
WDTOSC
t
WDT1
t
WDT2
t
RES
t
SST
t
INT
t
LVR
系统时钟
(晶体振荡、RC 振荡)
定时器输入频率
看门狗振荡器
看门狗溢出周期
(WDT RC 振荡器)
看门狗溢出周期
(系统时钟四分频)
外部复位低电平脉宽
系统启动延迟时间 — 从 HALT 状态唤醒 —
中断脉冲宽度 — —
低电压复时间 — —
参数
参数参数
V
DD
—
—
—
—
3V
5V
3V
5V
— WDT 分频前 —
—
测试条件测试条件
条件
条件
条件条件
2.2V~5.5V 400
3.3V~5.5V 400
2.2V~5.5V 0
3.3V~5.5V 0
—
—
分频前
WDT
—
最小
最小 典型
最小最小
典型 最大
典型典型
—
—
—
—
45 90 180 µs
32 65 130 µs
11 23 46 ms
8 17 33 ms
1024
1
—
1024
1
— —
0.25 1 2 ms
Ta=25℃
最大 单位
最大最大
单位
单位单位
4000 kHz
8000 kHz
4000 kHz
8000 kHz
—
—
—
t
SYS
µs
t
SYS
µs
Rev. 1.00 6 2006-09-28
HT45R36
系统功能说明
系统功能说明
系统功能说明系统功能说明
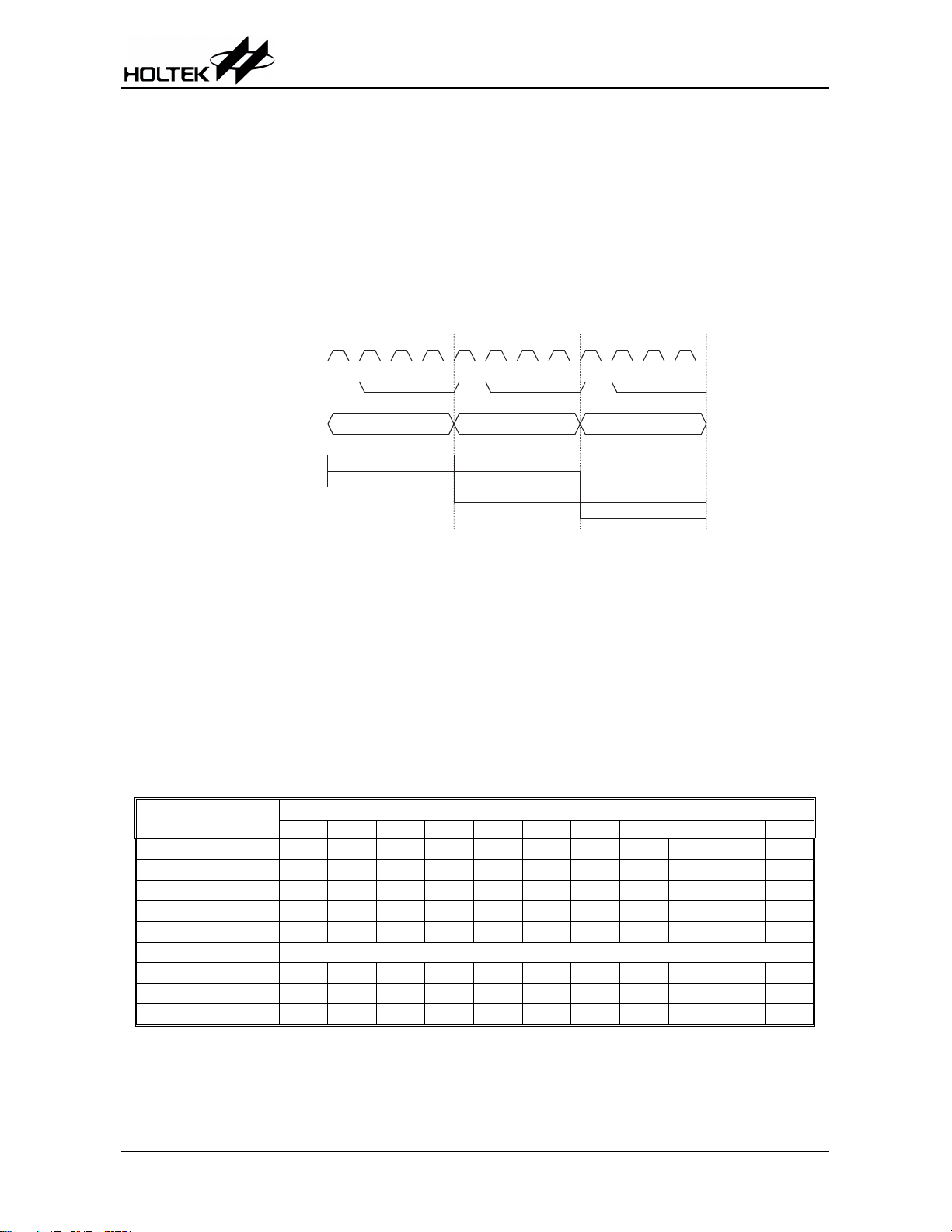
指令执行时序
指令执行时序
指令执行时序指令执行时序
单片机的系统时钟由晶体振荡器或 RC 振荡器产生。该时钟在芯片内部被分成四个互不重叠的时钟周
期。一个指令周期包括四个系统时钟周期。
指令的读取和执行是以流水线方式进行的, 这种方式在一个指令周期进行读取指令操作,而在下一个
指令周期进行解码与执行该指令。因此,流水线方式使多数指令能在一个周期内执行完成。但如果渉及到
的指令要改变程序计数器的值,就需要花两个指令周期来完成这一条指令。
S y s t e m C l o c k
O S C 2 ( R C o n l y )
T 1 T 2 T 3 T 4 T 1 T 2 T 3 T 4 T 1 T 2 T 3 T 4
P C
P C P C + 1 P C + 2
F e t c h I N S T ( P C )
E x e c u t e I N S T ( P C - 1 )
F e t c h I N S T ( P C + 1 )
E x e c u t e I N S T ( P C )
F e t c h I N S T ( P C + 2 )
E x e c u t e I N S T ( P C + 1 )
指令执行时序
指令执行时序
指令执行时序指令执行时序
程序计数器
程序计数器 ———— PC
程序计数器程序计数器
程序计数器(PC)控制程序存储器 ROM 中指令执行的顺序,它可寻址整个 ROM 的范围。
取得指令码以后,程序计数器会自动加一,指向下一个指令码的地址。但如果执行跳转、条件跳跃、
向 PCL 赋值、子程序调用、初始化复位、内部中断、外部中断、子程序返回等操作时,PC 会载入与指令
相关的地址而非下一条指令地址。
当遇到条件跳跃指令且符合条件时,当前指令执行过程中读取的下一条指令会被丢弃,取而代之的是
一个空指令周期,随后才能取得正确的指令。反之,就会顺序执行下一条指令。
程序计数器的低字节(PCL)是一个可读写的寄存器(06H)。对 PCL 赋值将产生一个短跳转动作,跳
转的范围为当前页 256 个地址。
当遇到控制转移指令时,系统也会插入一个空指令周期。
程序计数器
程序计数器
模式
模式
模式模式
初始化复位
外部中断 0
外部中断 1
定时/计数器溢出
外部 RC 振荡中断
条件跳跃
装载 PCL
跳转,子程序调用
从子程序返回
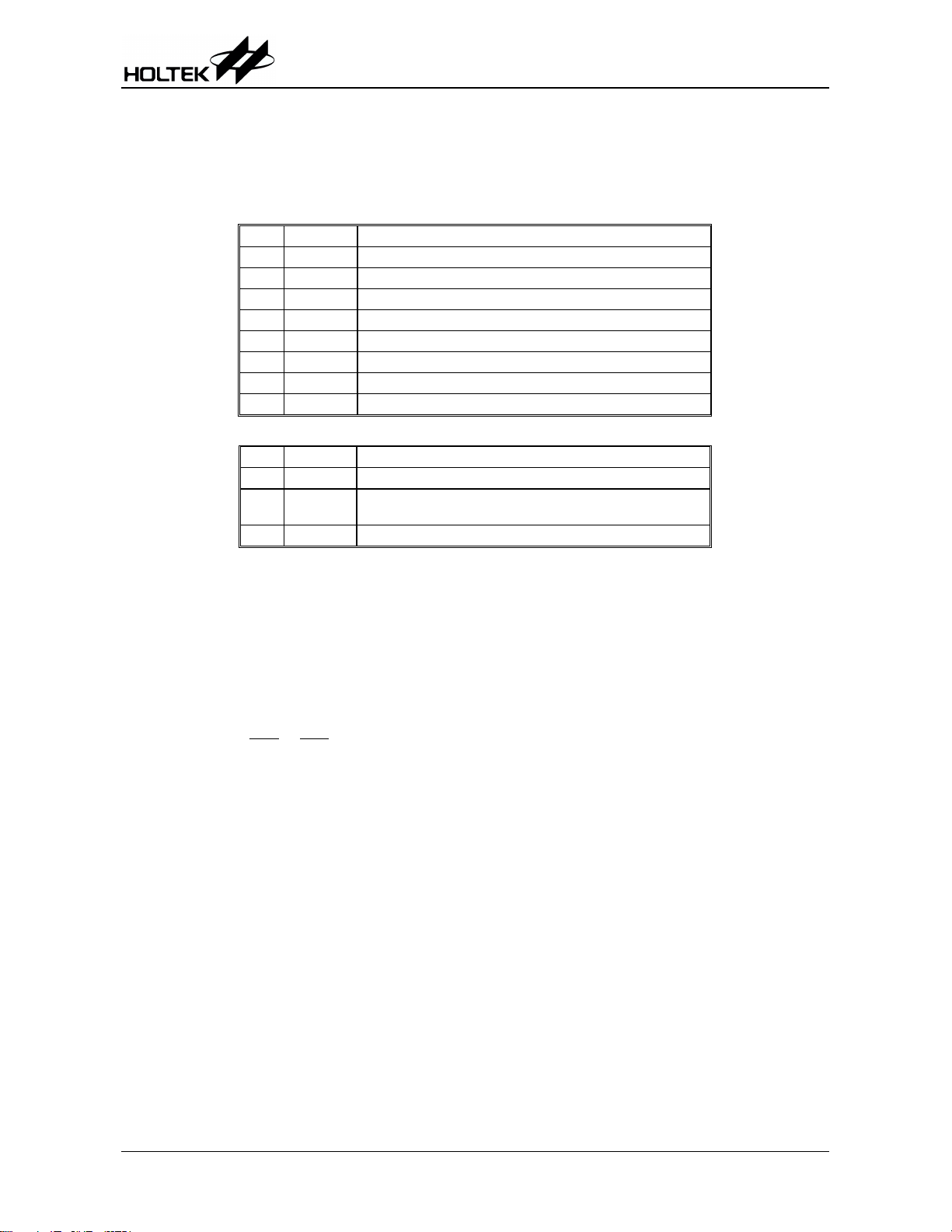
注:
*10 ~ *0
#10 ~ #0
*10 *9 *8 *7 *6 *5 *4 *3 *2 *1 *0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 1 1 0 0
0 0 0 0 0 0 1 0 0 0 0
*10 *9 *8 @7 @6 @5 @4 @3 @2 @1 @0
#10 #9 #8 #7 #6 #5 #4 #3 #2 #1 #0
S10 S9 S8 S7 S6 S5 S4 S3 S2 S1 S0
程序计数器
程序计数器
程序计数器程序计数器
:程序计数器位
:指令代码位
S10 ~ S0
@7 ~ @0 :PCL位
程序计数器程序计数器
PC+2
:堆栈寄存器位
Rev. 1.00 7 2006-09-28
程序存储器
程序存储器 ———— ROM
程序存储器程序存储器
HT45R36
程序存储器用来存放要执行的指令代码,以及一些数据、表
格和中断入口。程序存储器有
2048×14
用程序计数器或表格指针进行寻址。
位,程序存储器空间可以
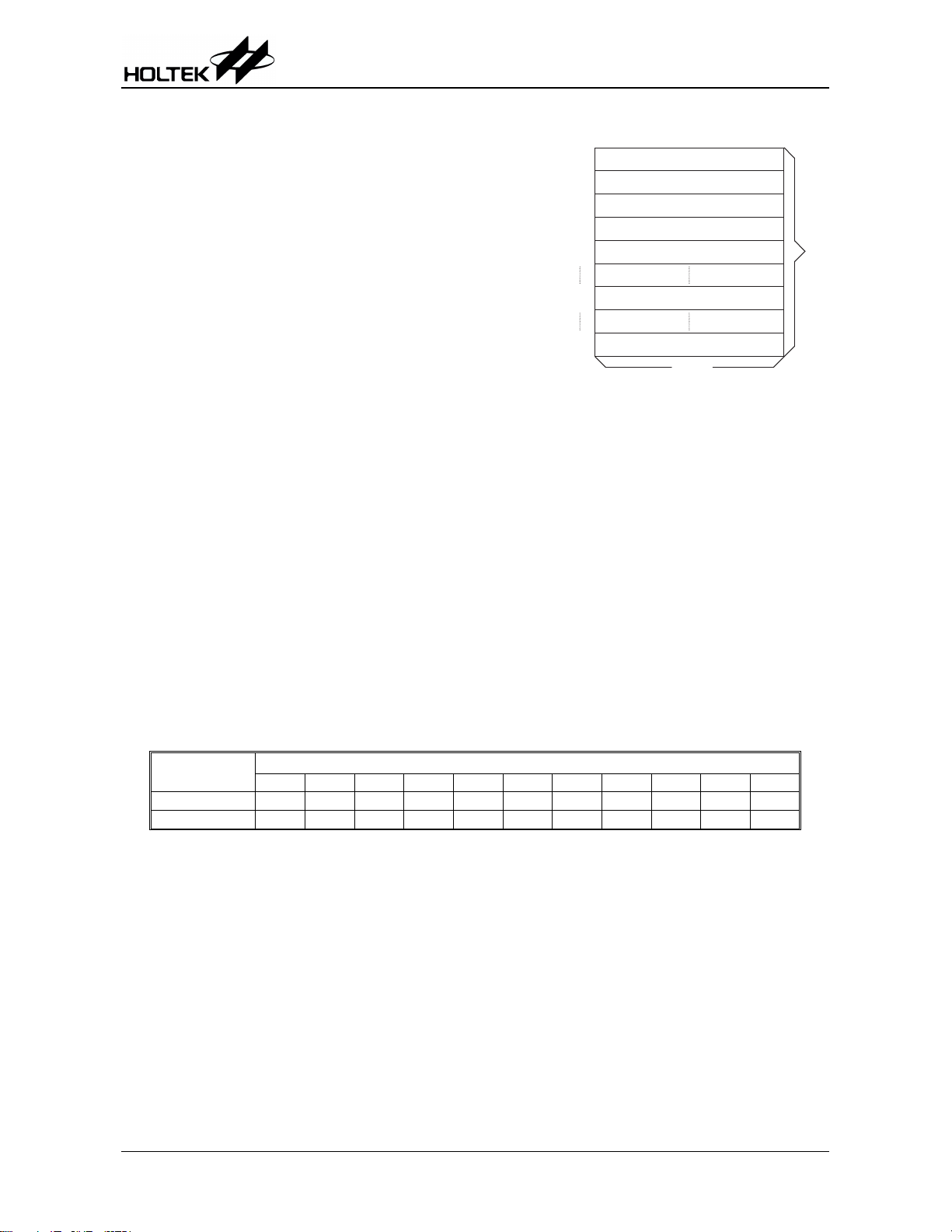
以下列出的程序存储器地址是系统专为特殊用途而保留的:
· 地址 000H
该地址为程序初始化保留。系统复位后,程序总是从 000H
开始执行。
· 地址
004H
该地址为外部中断 0 服务程序保留。当 INT0 引脚有触发信
号输入,如果中断允许且堆栈未满,则程序会跳转到 004H 地址
开始执行。
· 地址 008H
该地址为外部中断 1 服务程序保留。当 INT1 引脚有触发信
号输入,如果中断允许且堆栈未满,则程序会跳转到
地址开始执行。
008H
0 0 0 H
0 0 4 H
0 0 8 H
0 0 C H
0 1 0 H
n 0 0 H
n F F H
7 0 0 H
7 F F H
D e v i c e I n i t i a l i z a t i o n P r o g r a m
E x t e r n a l I n t e r r u p t 0
E x t e r n a l I n t e r r u p t 1
T i m e r / E v e n t C o u n t e r O v e r f l o w
E x t e r n a l R C O s c i l l a t i o n C o n v e r t e r I n t e r r u p t
L o o k - u p T a b l e ( 2 5 6 w o r d s )
L o o k - u p T a b l e ( 2 5 6 w o r d s )
程序存储器
程序存储器
程序存储器程序存储器
1 4 - B i t s
N o t e : n r a n g e s f r o m 0 t o 7
P r o g r a m
M e m o r y
· 地址 00CH
该地址为定时/计数器中断服务程序保留。当定时/计数器溢出,如果中断允许且堆栈未满,则程序会
跳转到 00CH 地址开始执行。
· 地址 010H
该地址为 RC 振荡中断服务程序保留。当外部 RC 振荡产生中断,如果中断允许且堆栈未满,则程序
会跳转到
010H
地址开始执行。
· 表格区
ROM 空间的任何地址都可做为查表使用。查表指令“TABRDC [m]”(查当前页表格,1 页=256 个字)
和“TABRDL [m]”(查最后页表格),会把表格内容低字节传送给[m],而表格内容高字节传送到 TBLH 寄
存器(08H)。只有表格内容的低字节被传送到目标地址中,而高字节被传送到表格内容高字节寄存器 TBLH,
并且 TBLH 的高 2 位始终为“0”。表格内容高字节寄存器 TBLH 是只读寄存器。表格指针(TBLP)是可读/
写寄存器(07H),用来指明表格地址。在查表之前,要先将表格地址写入 TBLP 中。如果主程序和中断服务
程序(ISR)都用到查表指令,主程序中 TBLH 的值可能会因为 ISR 中执行的查表指令而发生变化,产生错误。
也就是说,要避免在主程序和中断服务程序中都使用查表指令。但如果必须这样做的话,我们可以在查表
指令前先将中断禁止,在保存了 TBLH 的值后再开放中断以避免发生错误。所有与表格有关的指令都需要
两个指令周期的执行时间。这里提到的表格区都可以做为正常的程序存储器来使用。
表格区
表格区
指令
指令
指令指令
*10 *9 *8 *7 *6 *5 *4 *3 *2 *1 *0
表格区表格区
TABRDC[m] P10 P9 P8 @7 @6 @5 @4 @3 @2 @1 @0
TABRDL[m] 1 1 1 @7 @6 @5 @4 @3 @2 @1 @0
表格区
表格区
表格区表格区
注:
:表格地址字节
*10~*0
P10~P8
:当前程序指针字节
@7~@0
:表格指针字节
堆栈寄存器
堆栈寄存器 ———— STACK
堆栈寄存器堆栈寄存器
堆栈寄存器是特殊的存储器空间,用来保存 PC 的值。HT45x36 有 4 层堆栈,堆栈寄存器既不是数据
存储器的一部分,也不是程序存储器的一部分,而且它既不能读出,也不能写入。堆栈的使用是通过堆栈
指针(SP)来实现的,堆栈指针也不能读出或写入。当发生子程序调用或中断响应时,程序计数器(PC)
的值会被压入堆栈;在子程序调用结束或中断响应结束时(执行指令
RET或RETI
),堆栈将原先压入堆栈
的内容弹出,重新装入程序计数器中。在系统复位后,堆栈指针会指向堆栈顶部。
如果堆栈已满,并且发生了不可屏蔽的中断,那么只有中断请求标志会被记录下来,而中断响应会被
抑制,直到堆栈指针(执行 RET 或 RETI 指令)发生递减,中断才会被响应。这个功能可以防止堆栈溢出,
使得程序员易于使用这种结构。同样,如果堆栈已满,并且发生了子程序调用,那么堆栈会发生溢出,首
先进入堆栈的内容将会丢失,只有最后的 4 个返回地址会被保留。
Rev. 1.00 8 2006-09-28
数据存储器
数据存储器 ———— RAM
数据存储器数据存储器
HT45R36
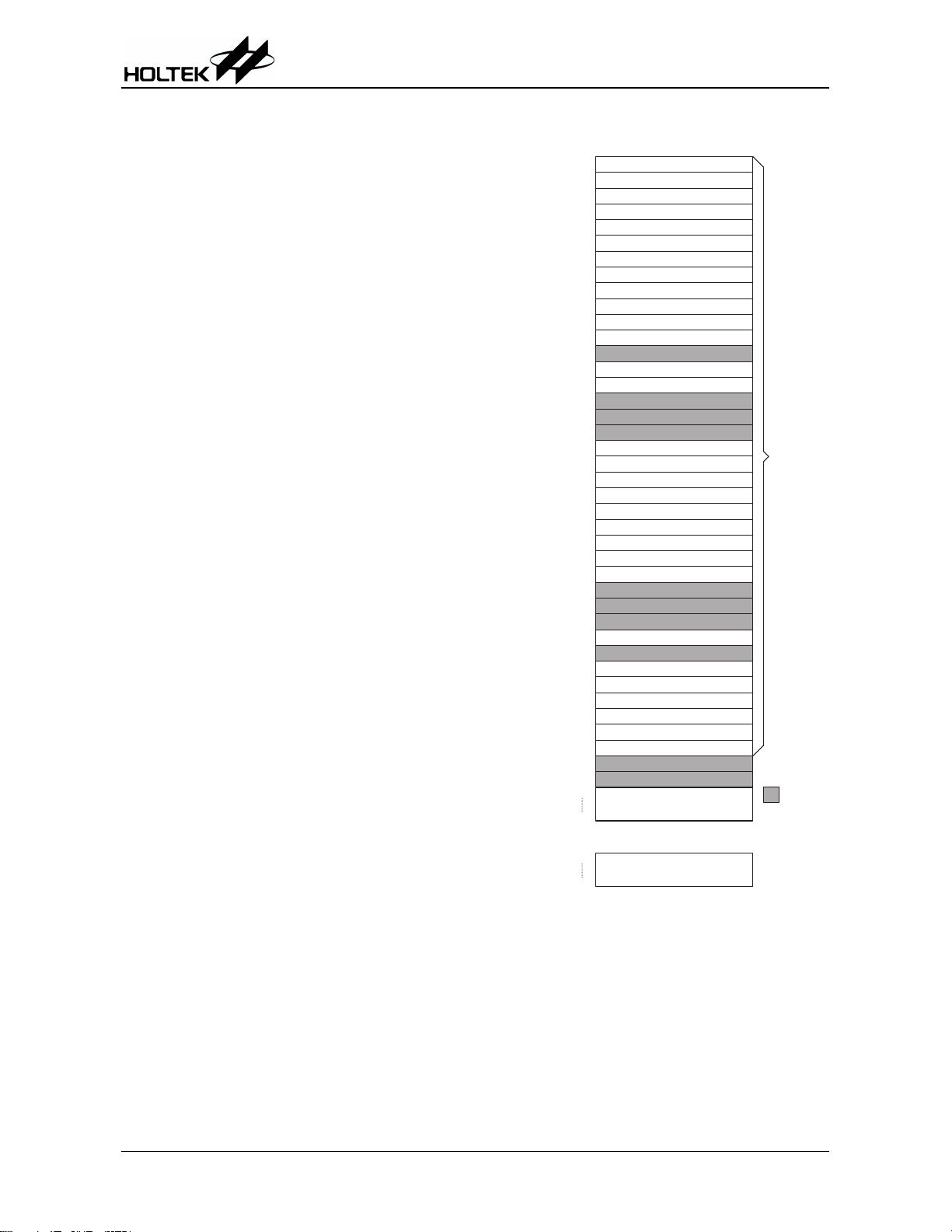
数据存储器由 150×8 位组成,分为两个功能区间:特殊功能
寄存器和通用数据存储器(
),数据存储器单元大多数是可
120×8
读/写的,但有些只读的。通用数据寄存器地址从 28H 到 7FH(Bank0)
和 40H 到 5FH(Bank1),用来存储数据和控制信息。
所有的数据存储器单元都能直接执行算术、逻辑、递增、递
减和循环操作。除了一些特殊位外,数据存储器的每一位都可由
“SET[m].i”置位或由“CLR[m].i”复位。Bank0 内数据可以通过
间接寻址指针
MP0(01H)或MP1(02H)
进行间接访问。
Bank1 内数据必须通过间接寻址指针 MP1 和间接寻址寄存器
IAR1 间接访问。任何直接寻址或通过 MP0 和 IAR0 间接寻址将直
接访问 Bank0 内数据。
间接寻址寄存器
间接寻址寄存器
间接寻址寄存器间接寻址寄存器
间接寻址的方式允许使用间接指针操作数据,以取代通常的
直接存储器寻址方式。在间接寻址寄存器上的任何操作,将对间
接寻址指针所指定的存储器地址产生读/写操作。此型号单片机提
供了两个间接寻址寄存器(IAR0 和 IAR1)和两个间接 寻址指针
(MP0 和 MP1)。要注意的是,这些间接寻址寄存器并不是实际存
在的,间接读取
寄存器将返回“
IAR
”的结果,而间接写入
00H
此寄存器则不做任何操作。
此型号单片机提供两个间接寻址指针,即 MP0 和 MP1。由于
这些指针寄存器能像普通的寄存器一样进行读写操作,因此提供
了一个寻址有效方法。当对间接寻址寄存器进行任何操作时,实
际地址是由间接寻址指针所指向的地址。
间接寻址指针的最高位未定义,必须注意读取该位得到的结
果是“1”。
Bank 指针
指针——
——BP
指针指针
————
通用数据存储器被分为两个 Bank,即 Bank0 和 Bank1。如果
要访问
Bank0或Bank1
的通用数据存储器,必须设置存储区指针
BP 值为“00H”或“01H”,来选择正确的数据存储区。但必须注
意 Bank1 内数据必须通过间接寻址指针 MP1 和间接寻址寄存器
IAR1 来访问。
任何直接寻址或通过 MP0 和 IAR0 间接寻址将访问 Bank0 内
数据。复位后,存储区指针 BP 指向 Bank0,但在 HALT 模式下的
溢出复位,不会改变存储区指针BP的值。
WDT
需要注意的是,特殊功能寄存器不受存储区指针 BP 的影响,
也就是说,不论是在 Bank0 还是 Bank1 内,都能对特殊功能寄存
器进行读写操作。
I n d i r e c t A d d r e s s i n g R e g i s t e r 0
0 0 H
0 1 H
I n d i r e c t A d d r e s s i n g R e g i s t e r 1
0 2 H
0 3 H
0 4 H
0 5 H
0 6 H
0 7 H
0 8 H
0 9 H
0 A H
0 B H
0 C H
0 D H
0 E H
0 F H
1 0 H
1 1 H
1 2 H
1 3 H
1 4 H
1 5 H
1 6 H
1 7 H
1 8 H
1 9 H
1 A H
1 B H
1 C H
1 D H
1 E H
1 F H
2 0 H
2 1 H
2 2 H
2 3 H
2 4 H
2 5 H
2 6 H
2 7 H
2 8 H
G e n e r a l P u r p o s e D a t a M e m o r y
7 F H
R A M M a p p i n g B a n k 0
4 0 H
G e n e r a l P u r p o s e D a t a M e m o r y
5 F H
R A M M a p p i n g B a n k 1
T B L P
T B L H
W D T S
S T A T U S
I N T C 0
T M R C
A S C R
I N T C 1
T M R A H
T M R A L
R C O C C R
T M R B H
T M R B L
R C O C R
( 8 8 B y t e s )
( 3 2 B y t e s )
数据存储器
数据存储器
数据存储器数据存储器
M P 0
M P 1
A C C
P C L
T M R
P A C
P B C
P C C
P D C
B P
P A
P B
P C
P D
S p e c i a l P u r p o s e
D a t a M e m o r y
: U n u s e d
R e a d a s " 0 0 "
Rev. 1.00 9 2006-09-28

HT45R36
,
累加器
累加器
累加器累加器
累加器(ACC)与算术逻辑单元(ALU)有密切关系。它对应于 RAM 地址 05H,做为运算的立即数
据。存储器之间的数据传送必须经过累加器。
算术逻辑单元
算术逻辑单元 ———— ALU
算术逻辑单元算术逻辑单元
算术逻辑单元(ALU)是执行 8 位算术、逻辑运算的电路,它提供有以下功能:
· 算术运算(ADD,ADC,SUB,SBC,DAA)
· 逻辑运算(
· 移位运算(RL,RR,
· 递增和递减(INC,DEC)
· 分支判断(SZ,SNZ,SIZ,SDZ…)
ALU 不仅可以储存数据运算的结果,还会改变状态寄存器的值。
状态寄存器
状态寄存器 ————
状态寄存器状态寄存器
8 位的状态寄存器(0AH),由零标志位(Z)、进位标志位(C)、辅助进位标志位(AC)、溢出标志
位(OV)、暂停标志位(PDF)和看门狗定时器溢出标志位(TO)组成。该寄存器不仅记录状态信息,而
且还控制操作顺序。
除了 PDF 和 TO 标志外,状态寄存器的其它位都可以用指令改变。任何对状态寄存器的写操作都不会
改变 PDF 和 TO 的值。对状态寄存器的操作可能会导致与预期不一样的结果。TO 标志只受系统上电、看
门狗溢出、“
“HALT” 指令的影响。
AND,OR,XOR,CPL)
RLC,RRC)
STATUS
CLR WDT”
符号
符号 位位位位 功能
符号符号
C 0
AC 1
Z 2
OV 3
PDF 4
TO 5
—
—
指令或“
如果在加法运算中结果产生了进位或在减法运算中结果不产生借位
则 C 被置位;反之,C 被清除。它也可被循环移位指令影响。
如果在加法运算中低 4 位产生了进位或减法运算中低 4 位不产生借
位,则 AC 被置位;反之,AC 被清除。
如果算术或逻辑运算的结果为零,则 Z 被置位;反之,Z 被清除。
如果运算结果向最高位进位,但最高位并不产生进位输出,则 OV 被
置位;反之,OV 被清除
系统上电或执行“CLR WDT”指令,PDF 被清除;执行“HALT”指
令,PDF 被置位。
系统上电、执行“CLR WDT”或“HALT”指令,TO 被清除;WDT
定时溢出,TO被置位。
6
未用,读出为“0”
7
未用,读出为“0”
HALT”
指令的影响。
STATUS(0AH) 寄存器
PDF
功能
功能功能
寄存器
寄存器寄存器
标志只受系统上电、“
CLR WDT”
指令或
标志位 Z、OV、AC 和 C 反映的是最近一次操作的状态。
在进入中断程序或子程序调用时,状态寄存器不会被自动压入堆栈。如果状态寄存器的内容是重要的,
而且子程序会影响状态寄存器的内容,那么程序员必须事先将
Rev. 1.00 10 2006-09-28
STATUS
的值保存好。
HT45R36
INT1
中断
中断
中断中断
此型号单片机提供两个外部中断、一个内部 8 位定时/计数器中断、一个外部 RC 振荡中断。中断控制
寄存器0(
INTC0;0BH
控制位用来设置中断允许/禁止。
)和中断控制寄存器1(
位位位位 符号
0 EMI
1 EEI0
2 EEI1
3 ETI
4 EIF0
5 EIF1
6 TF
7
符号 功能
符号符号
总中断控制位(1=允许;0=禁止)
外部中断 0 控制位(1=允许;0=禁止)
外部中断1控制位(1=允许;0=禁止)
定时/计数器中断控制位(1=允许;0=禁止)
外部中断 0 请求标志(1=有;0=无)
外部中断 1 请求标志(1=有;0=无)
定时/计数器中断请求标志(1=有;0=无)
—
未用,读出为“0”
INTC1;1EH
)包含了中断控制位和中断请求标志,中断
功能
功能功能
INTC0(0BH) 寄存器
寄存器
寄存器寄存器
位位位位 符号
1~3
5~7
符号 功功功功 能能能能
符号符号
0 ERCOCI
—
4 RCOCF
外部 RC 振荡中断控制位(1=允许;0=禁止)
未用,读出为“0”
外部RC振荡中断请求标志(1=有;0=无)
INTC1(1EH) 寄存器
寄存器
寄存器寄存器
只要有中断子程序被服务,其余的中断全部都被自动禁止(通过清除 EMI 位),这种做法的目的在于
防止中断嵌套。这时如果有其它中断发生,只有中断请求标志会被记录下来。如果在中断服务程序中有另
一个中断需要响应,程序员可以置位
EMI、INTC0和INTC1
所对应的位,以便进行中断嵌套。如果堆栈
已满,则中断并不会被响应,一直到堆栈指针(SP)发生递减后才会响应。如果需要中断立即得到响应,
应避免堆栈饱和。
所有的中断都具有唤醒能力。当有中断被服务,系统会将程序计数器值压入堆栈,然后再跳转至中断
服务程序的入口。但这时只有程序计数器的内容被压入堆栈,如果其它寄存器和状态寄存器的内容会被中
断程序改变,从而会破坏主程序的控制流程的话,程序员应该事先将这些数据保存起来。
外部中断是由
断请求标志位(
EIF0;INTC0
INT0
和
引脚边沿信号触发的,掩膜选项决定其上升沿触发还是下降沿触发,其中
的第4位,
EIF1;INTC0
的第5位)会被置位。如果中断允许,且堆栈未满,
当发生外部中断时,会产生地址 04H 或 08H 的子程序调用;而中断请求标志 EIF0 或 EIF1 和总中断控制
位 EMI 会被清除,以禁止其它中断响应。
内部定时/计数器中断是由定时/计数器溢出触发的,其中断请求标志(TF;INTC0 的第 6 位)会被置
位。如果中断允许,且堆栈未满,当发生定时/计数器中断时,会产生地址 0CH 的子程序调用;而中断请
求标志 TF 和总中断控制位 EMI 会被清除,以禁止其它中断响应。
外部RC振荡中断是由定时器A或定时器B溢出触发的,其中断请求标志(
RCOCF;INTC1
的第
位)会被置位。如果中断允许,且堆栈未满,当定时器中断时,会产生地址 10H 的子程序调用;而中断请
求标志 RCOCF 和总中断控制位 EMI 会被清除,以禁止其它中断响应。
在执行中断子程序期间,其它的中断请求会被屏蔽,直到执行 RETI 指令或 EMI 和相关中断控制位被
置位(当然,此时堆栈未满)。如果要从中断子程序返回,只要执行 RET 或 RETI 指令即可。其中,RETI
指令会自动置位 EMI,以允许中断服务,而 RET 则不会。
如果中断在两个连续的
脉冲的上升沿之间发生,且中断响应允许,那么在下两个T2脉冲之间,
T2
该中断会被服务。如果同时发生中断请求,其优先级如下表示;也可以通过设定各中断相关的控制位来改
变优先级。
4
Rev. 1.00 11 2006-09-28
HT45R36
No.
a
b
c
d
中断控制寄存器 0(INTC0),由定时/计数器中断请求标志(TF)、外部中断 1 请求标志(EIF1)、外
部中断0请求标志(
)、定时/计数器中断允许(
EIF0
和总中断允许(EMI)组成,其对应于数据存储器地址 0BH。中断控制寄存器 1(INTC1),由外部 RC 中
断请求标志(RCOCF)和外部 RC 中断允许(ERCOCI)组成,其对应于数据存储器地址 1EH。EMI、EEI0、
EEI1、ETI 和 ERCOCI 用来控制中断的允许/禁止状态的。这些控制位可以用来屏蔽正在进行中断服务程序
时发生的其它中断请求。一旦中断请求标志(TF、RCOCF、EIF1、EIF0)被置位,会一直保留在 INTC0
和
INTC1
寄存器中,直到中断被响应或用软件指令清除为止。
建议不要在中断服务程序中使用“CALL”指令来调用子程序。因为中断随时都可能发生,而且需要
立刻给予响应。如果只剩下一层堆栈,而中断不能被很好地控制,原先的控制序列很可能因为在中断子程
序中执行“CALL”指令而使堆栈溢出,从而发生混乱。
振荡电路
振荡电路
振荡电路振荡电路
中断源
中断源 优先级
中断源中断源
外部中断 0
外部中断 1
定时/计数器中断
外部 RC 振荡中断
中断优先级
中断优先级
中断优先级中断优先级
ETI
优先级 中断向量
优先级优先级
中断向量
中断向量中断向量
1 04H
2 08H
3 0CH
4 10H
)、外部中断1允许(
)、外部中断0允许(
EEI1
EEI0
)
HT45x36
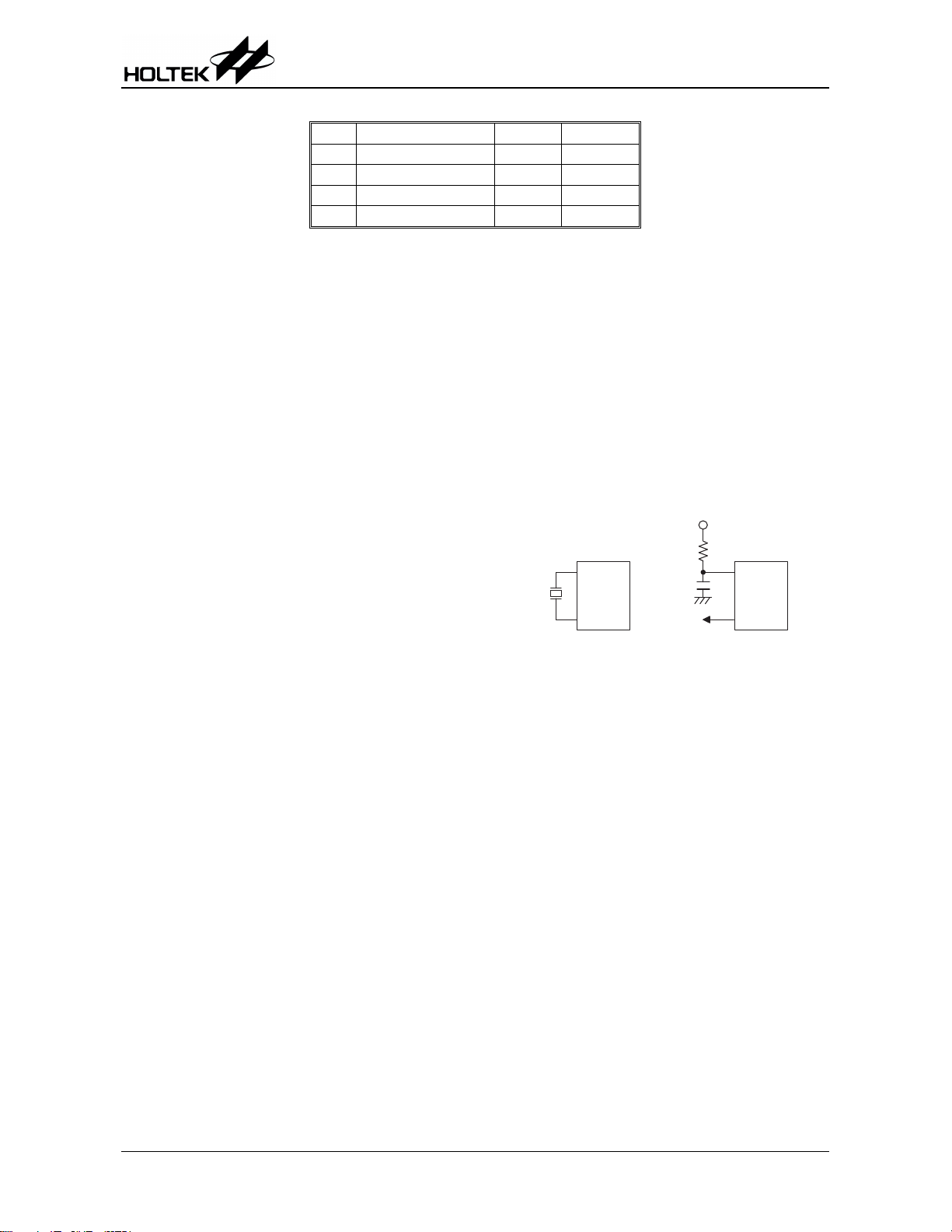
可以通过掩膜选项设定,不管选用哪一种振荡方式,其信号都
有两种振荡方式,外部RC振荡和外部晶体振荡,
V
D D
可以做为系统时钟。HALT 模式会停止系统振荡器,并忽视任
何外部信号以降低功耗。
如果选用外部 RC 振荡方式,在 OSC1 与 VDD 之间需要
接一个外部电阻,其阻值为 24kΩ到 1MΩ;而 OSC2 上会输出
带上拉的系统频率的4分频信号,可用于同步外部逻辑。
RC
O S C 1
O S C 2
C r y s t a l O s c i l l a t o r R C O s c i l l a t o r
4 7 0 p F
f
/ 4
S Y S
N M O S O p e n D r a i n
O S C 1
O S C 2
振荡方式是一种低成本的方案,但是,RC 振荡频率会随着
VDD、温度和芯片自身参数的漂移而产生误差。因此,在需要精确振荡频率做为计时操作的场合,并不适
合使用 RC 振荡方式。
如果选用晶体振荡方式,在 OSC1 和 OSC2 之间需要连接一个晶体,用来提供晶体振荡器所需的反馈
和相移,除此之外,不再需要其它外部元件。另外,在
OSC1和OSC2
之间也可使用谐振器来取代晶体振
荡器,但是在 OSC1 和 OSC2 需要多连接两个电容(如果振荡频率小于 1MHz)。
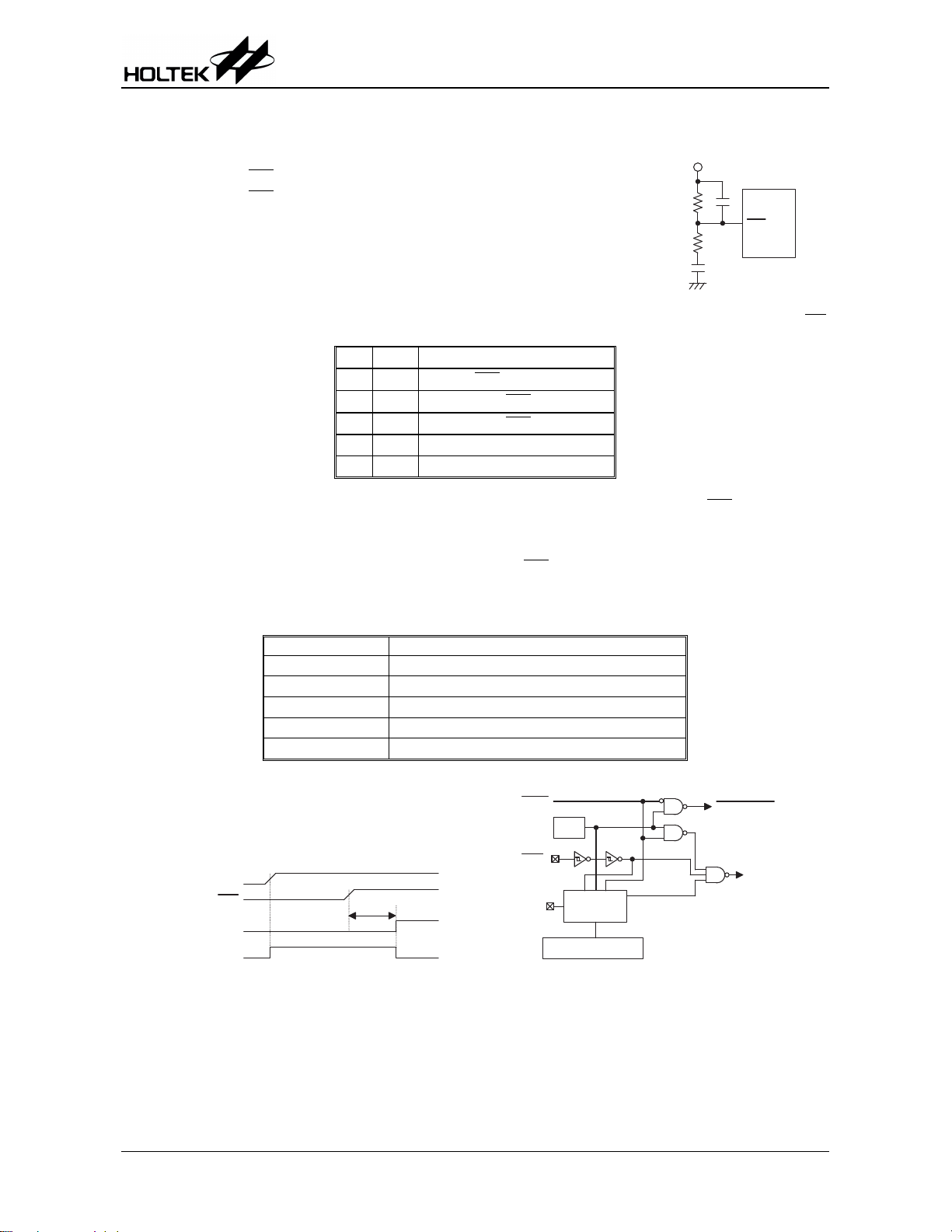
WDT 振荡器是一个内部 RC 振荡器,并不需要连接任何外部元件。当系统进入暂停模式时,系统时钟
会停止,但 WDT 振荡器会继续工作,其振荡周期大约为 65µ s/5V。如果要降低功耗,可在掩膜选项中关
闭 WDT 振荡器。
Rev. 1.00 12 2006-09-28
HT45R36
RES
看门狗定时器
看门狗定时器 ———— WDT
看门狗定时器看门狗定时器
看门狗定时器的时钟来源有两种:看门狗振荡器或指令时钟(系统时钟 4 分频),由掩膜选项设置。
看门狗定时器主要用来防止程序运行故障和程序跳入一死循环而导致不可预测的结果。看门狗定时器可由
掩膜选项设置为打开或关闭,如果在关闭状态,所有与 WDT 有关的指令操作都是没有作用的。
S y s t e m C l o c k / 4
W D T P r e s c a l e r
W D T
O S C
O p t i o n
S e l e c t
8 - b i t C o u n t e r
7 - b i t C o u n t e r
8 - t o - 1 M U X
W S 0 ~ W S 2
看门狗定时器
看门狗定时器
看门狗定时器看门狗定时器
W D T T i m e - o u t
看门狗时钟源先经过 256 分频。若设置内部 RC 振荡器作为看门狗时钟来源,其溢出周期为 17ms@5V。
溢出周期会因为温度、VDD 以及芯片参数的漂移而变化。通过 WDT 的预分频器,可以得到更长的溢出周
期。改变寄存器
为1,此时
WDT
WDTS的WS2、WS1和WS0
的分频级数为1:
,其最大的溢出周期为
128
位,可以得到不同的溢出周期。若
2.1s@5V
。若内部
WS2、WS1和WS0
振荡器被禁止,其
WDT
位都
时钟仍可由指令时钟提供,其运作方式与使用 WDT 振荡器相同。若 WDT 时钟来自指令时钟,在 HALT
模式下,WDT 会停止计数而失去保护功能;此时只能靠外部逻辑复位来重新启动系统。寄存器 WDTS 的
高 5 位保留给用户定义标志位使用。
若系统工作在强干扰环境中,建议选用内部 WDT 振荡器,因为 HALT 模式会使系统时钟停止,使看
门狗失去保护功能。
WS2 WS1 WS0
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
WDTS((((09H))))寄存器
分频系数
分频系数
分频系数分频系数
1:16
1:32
1:64
1:128
寄存器
寄存器寄存器
1:1
1:2
1:4
1:8
在正常运行时,WDT 溢出会使系统复位并置位 TO 标志;但在 HALT 模式下,WDT 溢出只产生“热
复位”,只有程序计数器 PC 和堆栈指针 SP 被复位。要清除 WDT 的值可以有三种方法:外部复位(低电平
输入到
端)、清除看门狗指令或 HALT 指令。清除看门狗指令有“CLR WDT”和“CLR WDT1”、“CLR
WDT2”二组指令。这两组指令中,只能选择其中一组,由掩膜选项决定。如果选择“CLR WDT”,那么
只要执行“CLR WDT” 指令就会清除 WDT。如果选择“CLR WDT1”和“CLR WDT2”,那么二条指令
要交替使用才会清除
Rev. 1.00 13 2006-09-28
WDT
,否则,
会由于溢出而使系统复位。
WDT

HT45R36
暂停模式
暂停模式 ———— HALT
暂停模式暂停模式
暂停模式是由 HALT 指令来实现的,暂停模式时系统状态如下:
· 系统振荡器停振,但
· RAM 和寄存器内容保持不变。
· WDT 被清除并重新开始计数(如果 WDT 时钟来源为 WDT 振荡器)。
· 所有输入/输出口都保持其原有状态。
· 置位 PDF 标志,清除 TO 标志。
以下操作可以使系统离开暂停模式:外部复位、中断、PA 口下降沿信号或看门狗定时器溢出。其中,
外部复位会使系统初始化,
的原因。PDF 标志可由系统上电或执行“CLR WDT”指令清除,由 HALT 指令置位。TO 标志由 WDT 溢
出置位,同时产生唤醒,但只有程序计数器 PC 和堆栈指针 SP 被复位,其它都保持其原有的状态。
PA 口唤醒和中断唤醒可做为正常运行的继续。PA 口的每一位都可以由掩膜选项设置为唤醒功能。如
果是由输入/输出口唤醒,程序会从下一条指令开始运行。如果是由中断唤醒,可能会发生两种情况:如果
中断禁止或中断允许但堆栈已满,程序将会从下一条指令开始运行;如果中断允许且堆栈未满,则会产生
一般的中断响应。如果在进入 HALT 模式之前,中断请求标志位已被置“1”,则中断唤醒功能被禁止。
当发生唤醒,系统需要额外花费 1024t
醒之后会插入一个等待周期。如果唤醒是由中断产生的话,则实际中断子程序的执行会延迟一个以上的周
期。如果唤醒导致下一条指令执行,那么在等待周期执行完成之后,会立即执行该指令。
为减小功耗,在进入暂停模式之前,应小心处理所有的输入/输出口状态。
振荡器会继续振荡(如果选择
WDT
溢出则会发生“热复位”。通过检测TO和
WDT
(系统时钟周期)的时间,才能重新正常运行,也就是说,唤
SYS
WDT
振荡器)。
PDF
标志,即可了解系统复位
Rev. 1.00 14 2006-09-28
复位
RES
RES
RES
RES
RES
复位
复位复位
总共有三种方法会产生初始复位:
· 正常运行时由
· 在暂停模式由
引脚发生复位。
引脚发生复位。
· 正常运行时由看门狗定时器溢出发生复位。
暂停模式中的看门狗定时器溢出与其它系统复位状况不同,因为看门狗
定时器溢出会执行“热复位”,只有程序计数器PC和堆栈指针SP被复位,
而系统其它部分都保持原有状态。在其它复位状态下,某些寄存器不会改变。
在初始复位时,大部分寄存器会复位成初始的状态。通过检测 PDF 和 TO 标
志,即可判断出各种不同的复位原因。
TO PDF
0 0
u u
0 1
1 u
1 1
注:“u”表示不变
上电时
正常运行时
暂停模式下
正常运行时
暂停模式下 WDT 溢出
为了保证系统振荡器起振并稳定运行,系统复位(包括上电复位、
暂停状态唤醒时,系统启动定时器(
)提供了一个额外的延迟时间,共
SST
复位原因
复位原因
复位原因复位原因
发生复位
发生复位
发生复位
RES
WDT
溢出
WDT
系统复位时,SST 会被加在复位延时中;由暂停模式唤醒也会加入 SST 延迟。
系统复位(包括上电复位、正常运行时
WDT
溢出或由
端复位)需要额外增加一个加载掩膜选项
RES
(Option)的时间。
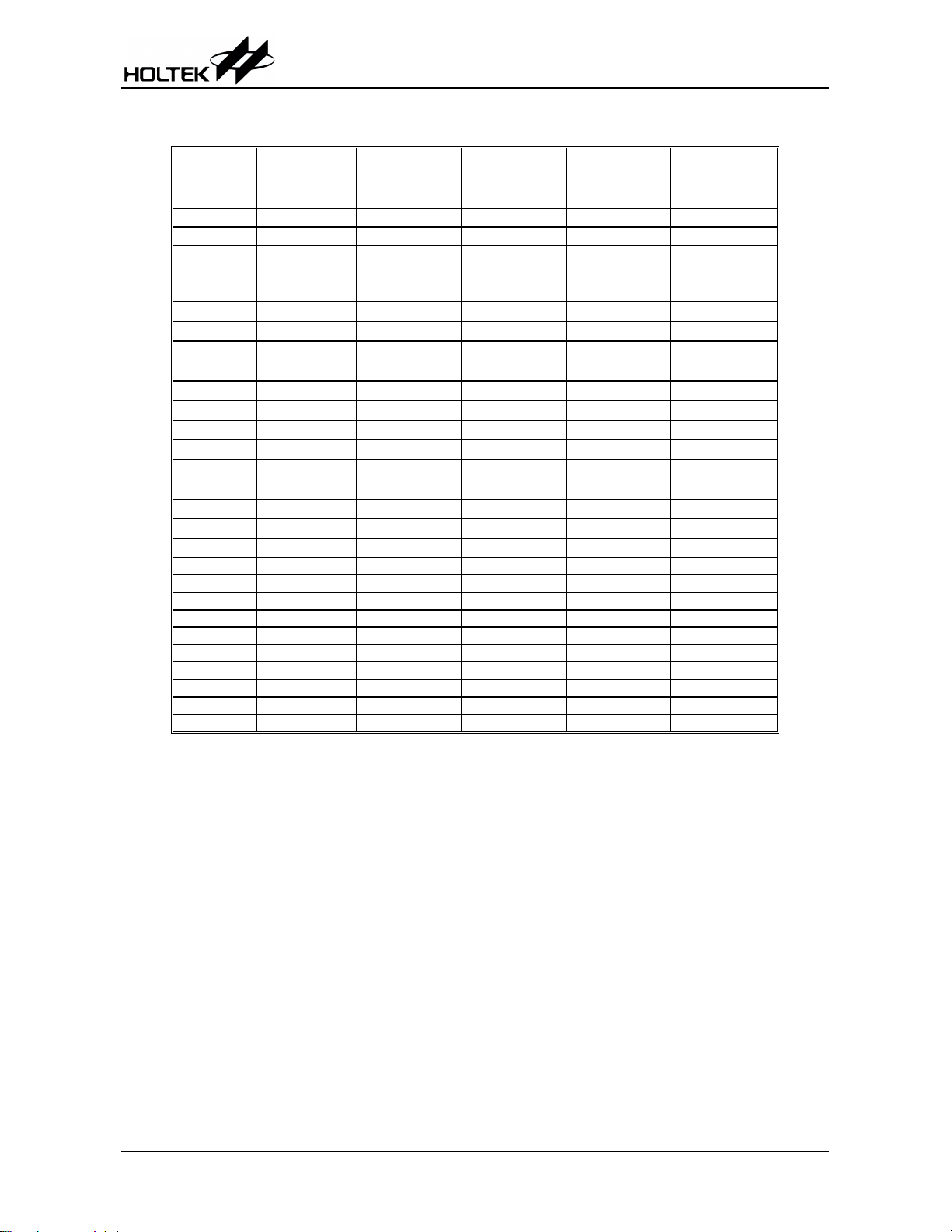
系统复位时各功能单元的状态如下所示:
PC 000H
中断 禁止
WDT
清除,在主系统复位后,WDT 开始计数
定时/计数器 停止
输入/输出端口 输入模式
堆栈指针 SP 指向堆栈顶部
H A L T
W D T
V
D D
0 . 0 1mF *
1 0 0 k
W
1 0 k
W
0 . 1mF *
注:“* ”连线应该尽量靠近
引脚,以减小干扰影响
溢出或由
个系统时钟周期。
1024
W a r m R e s e t
HT45R36
R E S
复位电路
端复位)或由
RES
R E S
V D D
R E S
S S T T i m e - o u t
C h i p R e s e t
Rev. 1.00 15 2006-09-28
复位时序
复位时序 复位电路结构
复位时序复位时序
t
S S T
O S C 1
S S T
1 0 - b i t R i p p l e
C o u n t e r
S y s t e m R e s e t
复位电路结构
复位电路结构复位电路结构
C o l d
R e s e t
有关寄存器的状态如下
MP0 -
xxx xxxx -
uuu uuuu
-uuu uuuu
-uuu uuuu
-uuu uuuu
MP1 -
xxx xxxx -
uuu uuuu
-uuu uuuu
-uuu uuuu
-uuu uuuu
BP ---- ---0
---- ---0
---- ---0
---- ---0
---- ---0
ACC
xxxx xxxx uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
PD
---- ---1 ---- ---1 ---- ---1
---- ---1
---- ---u
PDC ---- ---1
---- ---1 ---- ---1
---- ---1
---- ---u
ASCR
---
1 1111
---1 1111 ---
1 1111
---
1 1111
---
u uuuu
INTC1
---0---0
---0---0
---0---0
---0---0
---u---u
TMRAH
xxxx xxxx x
xxx xxxx x
xxx xxxx x
xxx xxxx uuuu uuuu
TMRAL
xxxx xxxx x
xxx xxxx x
xxx xxxx x
xxx xxxx uuuu uuuu
RCOCCR
0000 1
--- 0000 1
--- 0000 1
--- 0000 1
--- uuuu u
---
TMRBH
xxxx xxxx x
xxx xxxx x
xxx xxxx x
xxx xxxx uuuu uuuu
TMRBL
xxxx xxxx x
xxx xxxx x
xxx xxxx x
xxx xxxx uuuu uuuu
RCOCR
1xxx
--00
1xxx
--00
1xxx
--00
1xxx
--00
uuuu
--uu
有关寄存器的状态如下
有关寄存器的状态如下有关寄存器的状态如下
寄存器
寄存器
寄存器寄存器
(
复位
复位
复位复位
上电复位
上电复位
上电复位上电复位
)
WDT 溢出
溢出
溢出溢出
正常运行
正常运行
(
正常运行正常运行
)
复位
复位
复位复位
RES
(正常运行
正常运行)
正常运行正常运行
复位
复位
复位复位
RES
(暂停模式
暂停模式)
暂停模式暂停模式
WDT 溢出
溢出
溢出溢出
暂停模式
暂停模式
(
暂停模式暂停模式
HT45R36
)*
Program
Counter
000H 000H 000H 000H 000H
TBLP xxxx xxxx uuuu uuuu uuuu uuuu uuuu uuuu uuuu uuuu
TBLH --xx xxxx --uu uuuu --uu uuuu --uu uuuu --uu uuuu
WDTS 0000 0111 0000 0111 0000 0111 0000 0111 uuuu uuuu
STATUS --00 xxxx --1u xxxx --uu uuuu --01 uuuu --11 uuuu
INTC0 -000 0000 -000 0000 -000 0000 -000 0000 -uuu uuuu
TMR xxxx xxxx xxxx xxxx xxxx xxxx xxxx xxxx uuuu uuuu
TMRC 00-0 1000 00-0 1000 00-0 1000 00-0 1000 uu-u uuuu
PA 1111 1111 1111 1111 1111 1111 1111 1111 uuuu uuuu
PAC 1111 1111 1111 1111 1111 1111 1111 1111 uuuu uuuu
PB 1111 1111 1111 1111 1111 1111 1111 1111 uuuu uuuu
PBC 1111 1111 1111 1111 1111 1111 1111 1111 uuuu uuuu
PC 1111 1111 1111 1111 1111 1111 1111 1111 uuuu uuuu
PCC 1111 1111 1111 1111 1111 1111 1111 1111 uuuu uuuu
注: “*”表示“热复位”
Rev. 1.00 16 2006-09-28
”表示“不变”
“u
“x
”表示“未知”
HT45R36
定时
定时/计数器
计数器
定时定时
计数器计数器
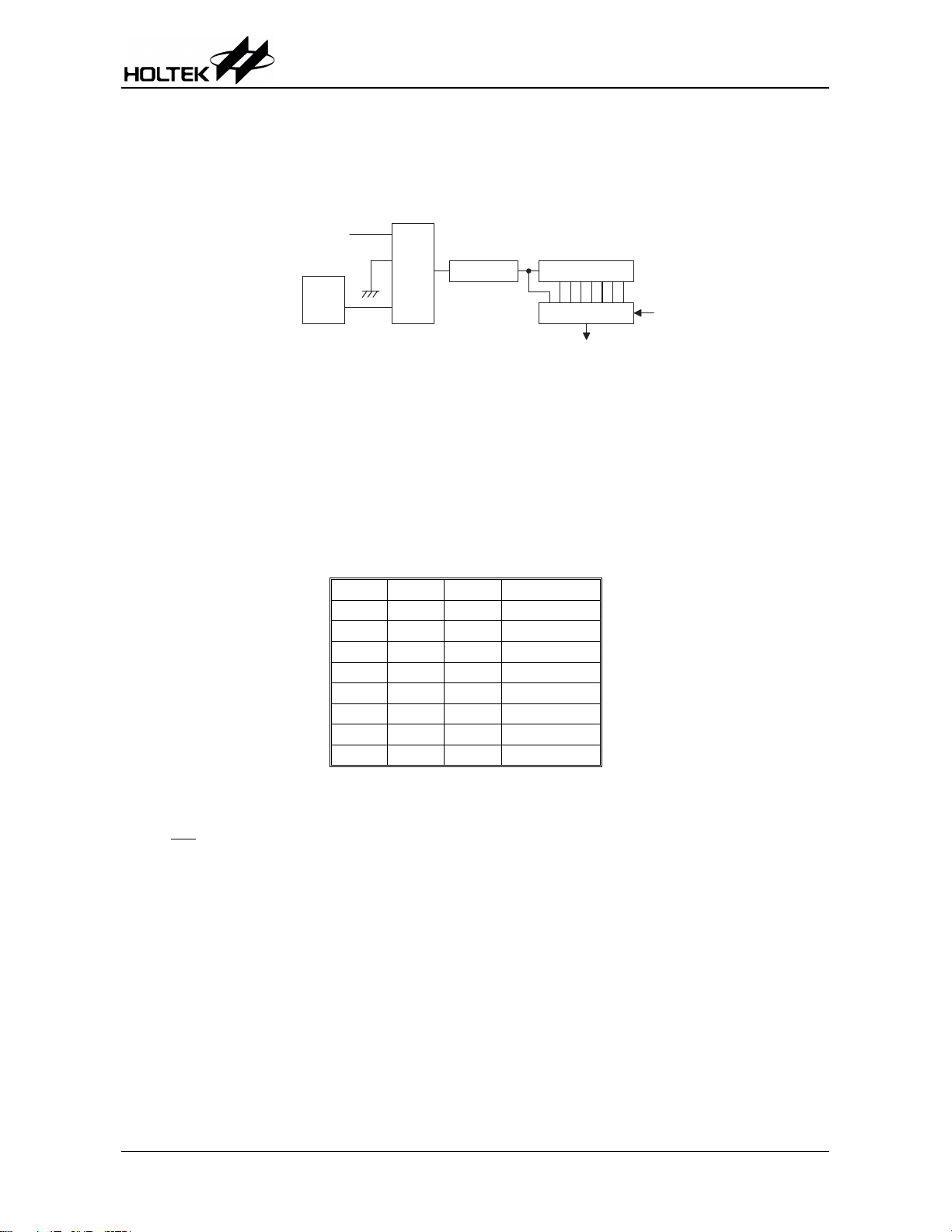
HT45x36 提供一个 8 位可编程向上计数的定时/计数器。定时/计数器的时钟来源可以是外部信号输入
或系统时钟。外部信号输入可以用来计数外部事件、测量时间间隔、测量脉冲宽度或产生一个精确的时基
信号。
S y s t e m C l o c k
7 - S t a g e P r e s c a l e r
8 - 1 M U X
T P S C 2 ~ T P S C 0
T M R
f
I N T
T M 1
T M 0
T E
8 - B i t T i m e r / E v e n t C o u n t e r
P r e l o a d R e g i s t e r
D a t a B u s
R e l o a d
T M 1
T M 0
T O N
P u l s e W i d t h
M e a s u r e m e n t
M o d e C o n t r o l
定时
定时/计数器
定时定时
计数器
计数器计数器
8 - B i t T i m e r / E v e n t
C o u n t e r ( T M R )
O v e r f l o w
t o I n t e r r u p t
有两个与定时/计数器有关的寄存器,TMR(0DH)和 TMRC(0EH)。TMR 寄存器有两个物理空间;
写入 TMR 会将初始值装入到定时/计数器的预置寄存器中,而读 TMR 则会取得定时/计数器的内容。TMRC
是定时/计数器控制寄存器,用来定义定时/计数器一些选项。
TM0、TM1 用来定义定时/计数器的工作模式。外部事件计数模式是用来记录外部事件的,其时钟来
源为外部 TMR 引脚输入。定时器模式是一个常用模式,其时钟来源为内部时钟 f
量 TMR 引脚高/低电平的脉冲宽度,其时钟来源为内部时钟 f
INT
。
。脉宽测量模式可以测
INT
无论是定时模式还是外部事件计数模式,一旦开始计数,定时/计数器会从寄存器当前值向上计到
0FFH。一旦发生溢出,定时/计数器会从预置寄存器中重新加载初值,并开始计数;同时置位中断请求标
志(TF;
INTC0
的第5位)。
在脉宽测量模式,当 TON 与 TE 是 1 时,只要 TMR 引脚有一个上升沿信号(如果 TE 是 0,则为下
降沿信号),定时/计数器就会开始计数,直到 TMR 脚电平恢复,同时 TON 被清零。测量的结果会保存在
寄存器中,直到有新的测量开始。换句话说,一次只能测量一个脉冲宽度。重新置位 TON 后,可以继续
测量。注意,在该模式下,定时/计数器是跳变触发而不是电平触发。当计数器溢出时,定时/计数器会从
预置寄存器中重新加载初值,并置位中断请求标志,这与其它两种模式一样。
Rev. 1.00 17 2006-09-28
HT45R36
位位位位 符号
符号(TMRC)
符号符号
定义预分频器级数,TPSC2,TPSC1,TPSC0=
0~2 TPSC0~TPSC2
3 TE
4 TON
5
—
000:f
INT=fSYS
001:f
INT=fSYS
010:f
INT=fSYS
011:f
INT=fSYS
100:f
INT=fSYS
101:f
INT=fSYS
110:f
INT=fSYS
111:f
INT=fSYS
定义定时/计数器 TMR 的触发方式
(0=上升沿触发,1=下降沿触发)
打开/关闭定时/计数器(1=打开,0=关闭)
未用,读出为“0”
/2
/4
/8
/16
/32
/64
/128
定义工作模式:
事件计数模式(外部时钟)
6
7
TM0
TM1
01=
10=定时模式(内部时钟)
11=脉冲宽度测量模式
00 =未用
TMRC(0EH) 寄存器
要启动计数器,只要置位 TON(TMRC 的第 4 位)。在脉宽测量模式下,TON 在测量结束后会被自
动清除;但在另外两种模式中,TON 只能由指令来清除。定时/计数器溢出可以做为唤醒信号。不管是什
么模式,只要写 0 到 ETI 即可禁止定时/计数器中断服务。
在定时/计数器停止计数时,写数据到定时/计数器的预置寄存器中,同时会将该数据写入到定时/计数
器。但如果在定时/计数器运行时这么做,数据只能写入到预置寄存器中,直到发生溢出时才会将数据从预
置寄存器加载到定时/计数器寄存器。读取定时/计数器时,计数会被停止,以避免发生错误;计数停止会
导致计数错误,程序员必须注意到这一点。TMRC 的第 0~2 位用来定义内部时钟预分频级数,定义如上表
所示。
功能
功能
功能功能
寄存器
寄存器寄存器
Rev. 1.00 18 2006-09-28

HT45R36
外部
外部 RC 振荡器
外部外部
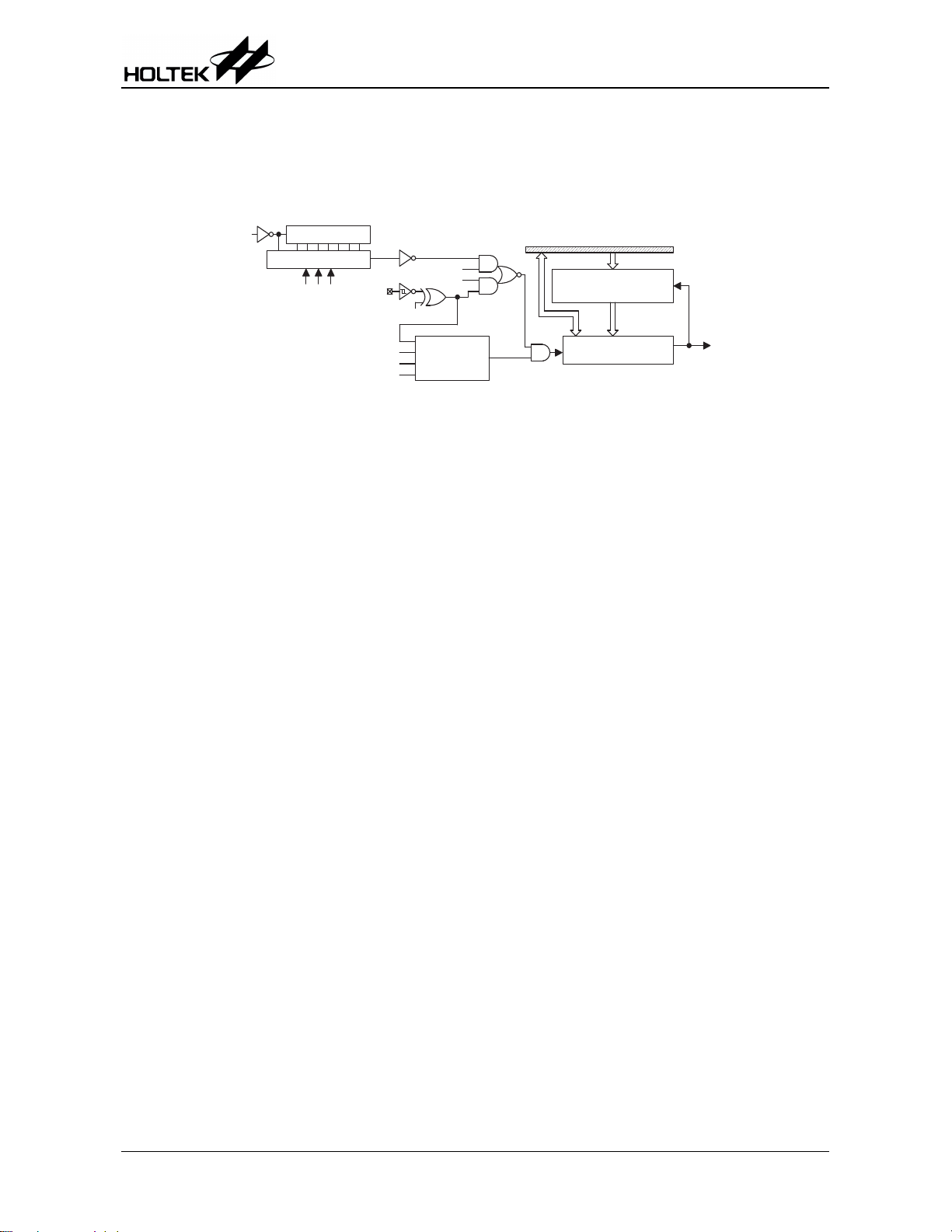
HT45x36 提供一个外部 RC 振荡的功能。外部RC 振荡器包含有两个16 位可编程向上计数器Timer A(其
时钟来源于系统时钟或系统时钟四分频)和
1 位)为“1”时,有四个寄存器与 RC 振荡器相关,TMRAL、TMRAH、TMRBL 和 TMRBH。Timer B 的
时钟可来自于外部 RC 振荡器;而 Timer A 来自于系统时钟或系统时钟四分频,由 RCOCCR 寄存器决定。
振荡器
振荡器振荡器
位位位位 符号
0~2
3
符号 功能
符号符号
— 未用,读出为“0”
— 未定义位,可读写
4 RCOCON
5
RCOM0
6
RCOM1
7
RCOM2
Timer B(
其时钟来源于外部RC振荡器)。当
功能
功能功能
RCO(RCOCR
打开/关闭外部 RC 振荡器(1=打开,0=关闭)
定义 Timer A 时钟来源,RCOM2、RCOM1 和 RCOM0=
000=系统时钟
001=系统时钟四分频
未定义
010=
011=未定义
100=未定义
101=未定义
110=未定义
未定义
111=
RCOCCR(22H)寄存器
寄存器
寄存器寄存器
的第
位位位位
符号
符号
符号符号
功能
功能
功能功能
Timer A 或 Timer B 溢出控制位,用于定义 Timer A 还
0 OVB
是
Timer B
溢出产生定时/计数器中断
(0=Timer A 溢出;1=Timer B 溢出)
1 RCO
2~3
4~7
S y s t e m C l o c k
S y s t e m C l o c k / 4
有六个与外部RC振荡器相关的特殊功能寄存器,
— 未用,读出为“0”
RW
定义 RC 振荡模式
(0=关闭 RC 振荡器;1=打开 RC 振荡器)
4 位可读写寄存器,可作标志位
S 1
S 2
R C O S C O u t p u t
RCOCR(25H)寄存器
T i m e r A
R C O C O N
T i m e r B
O V B = 0
O V B = 1
外部
外部RC振荡器
外部外部
寄存器
寄存器寄存器
振荡器
振荡器振荡器
E x t e r n a l R C O s c i l l a t i o n C o n v e r t e r I n t e r r u p t
R e s e t R C O C O N
TMRAH、TMRAL、RCOCCR、TMRBH、TMRBL
和 RCOCR。定时器 TMRA 时钟来源于内部,而定时器 TMRB 时钟来源于外部 RC 振荡器。当 Timer A 或
Timer B 溢出时,中断请求标志位 RCOCF 置位并触发外部 RC 振荡中断。Timer A 还是 Timer B 溢出产生
中断,由 OVB(RCOCR 的第 0 位)决定。在外部 RC 振荡模式中,Timer A 或 Timer B 溢出时,RCOCON 被
清零,同时定时器将停止运行。Timer A/Timer B 初值只有在写 TMRAH/TMRBH 时才会被改变,而读取
TMRAH/TMRBH 会得到 Timer A/Timer B 的值。写 TMRAL/TMRBL 只能将数据写到低字节缓冲器内。然
而
TMRAH/TMRBH
会把指定的数据和低字节缓冲器的内容分别写到
Timer A/Timer B
预置寄存器中。
Timer
A/Timer B 的预置寄存器只有在写 TMRAH/TMRBH 时才会被改写,而写 TMRAL/TMRBL 不会改变预置寄
存器值。
Rev. 1.00 19 2006-09-28

HT45R36
读取 TMRAH/TMRBH 同时,会将 TMRAL/TMRBL 送至低字节缓冲器。读取 TMRAL/TMRBL 将返
回低字节缓冲器内容。换言之,Timer A/Timer B 低字节寄存器无法直接读取,必须先读取 TMRAH/TMRBH,
将其低字节内容送至低字节缓冲器。
Timer B
定义 Timer A 的时钟源。Timer A 时钟来源于系统时钟或指令时钟。
一旦 RCOCON(RCOCCR 的第 4 位)置位,Timer A/Timer B 开始计数直至 Timer A 或 Timer B 溢出,并
且置中断请求标置位 RCOCF(INTC1 的第 4 位)。此时 Timer A/Timer B 停止计数,RCOCON 位自动清零。
若 RCOCON 置位,TMRAH、TMRAL、TMRBH 和 TMRBL 将不可读写。
外部 RC 振荡模式范例程序——Timer A 溢出:
clr RCOCCR
mov a,00000010b ;使能外部 RC 振荡器并设定其为 Timer A 溢出产生中断
mov RCOCR,a
clr intc1.4 ;
mov a,low(65536-1000) ;赋 Timer A 初值
mov tmral,a ;Timer A 计数 1000 次产生溢出
mov a,high(65536-1000)
mov tmrah,a
mov a,00h ;赋 Timer B 初值
mov tmrbl,a
mov a,00h
mov tmrbh,a
mov a,00110000b ;设定 Timer A 时钟源为 f
mov RCOCCR,a
p10:
clr wdt
snz intc1.4 ;检测外部 RC 中断请求标志
jmp p10
clr intc1.4 ;清除外部 RC 中断请求标志
;
时钟来源于外部电阻和电容组成的振荡器。寄存器
清除外部RC振荡器中断请求标志
其他程序
RCOCCR的RCOM0、RCOM1和RCOM2
/4,打开定时器
SYS
Rev. 1.00 20 2006-09-28
模拟开关
模拟开关
模拟开关模拟开关
HT45R36
HT45x36 提供 16 通道的模拟开关 RC1~RC16,其相应的控制寄存器为 ASCR(1AH)。
位位位位 符号
符号 功能
符号符号
0~4 ASON
5~7
— 未用,读出为“0”
功能
功能功能
定义模拟开关的通道位,ASON=
00000b=通道 1 打开,其它关闭
00001b=通道 2 打开,其它关闭
00010b=通道 3 打开,其它关闭
00011b=
通道4打开,其它关闭
00100b=通道 5 打开,其它关闭
00101b=通道 6 打开,其它关闭
00110b=通道 7 打开,其它关闭
00111b=通道 8 打开,其它关闭
01000b=通道 9 打开,其它关闭
01001b=
通道10打开,其它关闭
01010b=通道 11 打开,其它关闭
01011b=通道 12 打开,其它关闭
01100b=通道 13 打开,其它关闭
01101b=通道 14 打开,其它关闭
01110b=通道 15 打开,其它关闭
01111b=
通道16打开,其它关闭
1xxxxb=所有通道关闭,外部 RC 振荡器关闭
ASCR(1AH)寄存器
寄存器
寄存器寄存器
R C 1
R C 2
R C 3
R C 4
R C 5
R C 6
R C 7
R C 8
R C 9
R C 1 0
R C 1 1
R C 1 2
R C 1 3
R C 1 4
R C 1 5
R C 1 6
R C O U T
I N
R R E F
C R E F
A S O N
T . G . 1
T . G . 2
T . G . 3
T . G . 4
T . G . 5
T . G . 6
T . G . 7
T . G . 8
T . G . 9
T . G . 1 0
T . G . 1 1
T . G . 1 2
T . G . 1 3
T . G . 1 4
T . G . 1 5
T . G . 1 6
模拟开关
模拟开关
模拟开关模拟开关
T i m e r B
Rev. 1.00 21 2006-09-28

HT45R36
输入
输入/输出口
输出口
输入输入
输出口输出口
HT45x36 有 25 个双向输入/输出口,记为 PA、PB、PC 和 PD,其分别对应 RAM 地址[12H]、[14H]、
[16H]和[18H]
[m](m=12H、14H、16H 或 18H)指令的 T2 上升沿到来前准备好;输出时,端口有锁存功能,端口上的
数据会保持不变直到执行下一个写入操作。
。所有端口都可以进行输入/输出操作。输入时,端口没有锁存功能,输入信号必须在
V
D D
D a t a B u s
C o n t r o l B i t
P u l l - h i g h
Q
D
MOV A
,
W r i t e C o n t r o l R e g i s t e r
C h i p R e s e t
R e a d C o n t r o l R e g i s t e r
W r i t e D a t a R e g i s t e r
R e a d D a t a R e g i s t e r
S y s t e m W a k e - u p
( P A o n l y )
I N T 0 f o r P A 0 o n l y
I N T 1 f o r P A 1 o n l y
T M R f o r P A 2 o n l y
Q
C K
S
D a t a B i t
Q
D
Q
C K
S
输入
输入/输出口
输入输入
M
U
X
输出口
输出口输出口
O P 0 ~ O P 7
P A 0 ~ P A 7
P B 0 ~ P B 7
P C 0 ~ P C 7
P D 0
每个输入/输出口都有一个控制寄存器(PAC,PBC,PCC,PDC),用来控制输入/输出状态。利用控
制寄存器,可对
CMOS
输出、带或不带上拉电阻的斯密特触发输入通过软件动态地进行改变。做为输入时,
对应的控制寄存器应设置为“1”。输入信号来源也取决于控制寄存器,如果控制寄存器的值为“1”,那么
读取的是引脚状态;如控制寄存器的值为“0”,则读取的是内部锁存器的值。后者可能会在‘读-修改-写’
指令中发生。
做为输出时,只能采用 CMOS 输出。控制寄存器对应 RAM 地址 13H、15H、17H、19H。
系统复位之后,这些输入/输出口会是高电平或浮空状态(由上拉电阻选项决定)。每一个输入/输出锁
存位都能用“
SET [m].i
”或“
CLR [m].i
”指令置位或清除(
m=12H、14H、16H或18H)。
有些指令会先输入数据,然后进行输出操作。例如:“ SET [m].i”,“ CLR [m].i ”,“CPL [m] ”,
“CPLA[m]”这些指令会先将整个端口状态读入 CPU 中,接着执行所定义的运算(位操作),然后再将结果
写入锁存器或累加器中。
PA 的每一个口都具有唤醒系统的能力。PD 的高 7 位没有实际的物理结构;读取这些位会返回“0”,
而写入则是一个空操作。
所有的输入/输出口都有上拉电阻选项。一旦选择了上拉电阻选项,输入/输出口就加了上拉电阻。如
果不选择上拉电阻,必须注意在输入模式下,输入/输出口会产生浮空状态。
PA0、PA1 和 PA2 分别与 INTC0、INTC1 和 TMR 共用引脚。
建议用软件将未使用和没有外接的输入/输出口设置为输出模式,以防止这些端口在输入浮空时增加系
统的功耗。
Rev. 1.00 22 2006-09-28

低电压复位
低电压复位————LVR
低电压复位低电压复位
为了监控器件的工作电压,
作电压在 0.9V~V
LVR
HT45x36
之间,例如电池电压的变化,那么 LVR 会自动使器件产
提供低电压复位功能。如果器件的工
生内部复位。
LVR 功能说明如下:
· 低电压(0.9V~V
)的状态必须持续 1ms 以上。如果低电压的状态没
LVR
有持续 1ms 以上,那么 LVR 会忽视它而不去执行复位功能。
·
LVR
通过与外部
信号的“或”的功能来执行系统复位。
RES
VDD 与 VLVR 之间的关系如下所示:
V
D D
5 . 5 V
V
L V R
0 . 9 V
0 V
R e s e t S i g n a l
L V R D e t e c t V o l t a g e
L V R
4MHz
注:
V
D DVO P R
5 . 5 V
5 . 5 V
3 . 0 V
2 . 2 V
是在系统时钟为
V
OPR
HT45R36
V
0 . 9 V
时,使得芯片正常运行的电压值
R e s e t
N o r m a l O p e r a t i o n R e s e t
* 1 * 2
注:*1:要保证系统振荡器起振并稳定运行,在系统进入正常运行以前,
*2:因为低电压状态必须保持 1ms 以上,因此进入复位模式就要有 1ms 的延迟。
提供额外的
SST
个系统时钟周期的延迟。
1024
Rev. 1.00 23 2006-09-28

掩模选项
掩模选项
掩模选项掩模选项
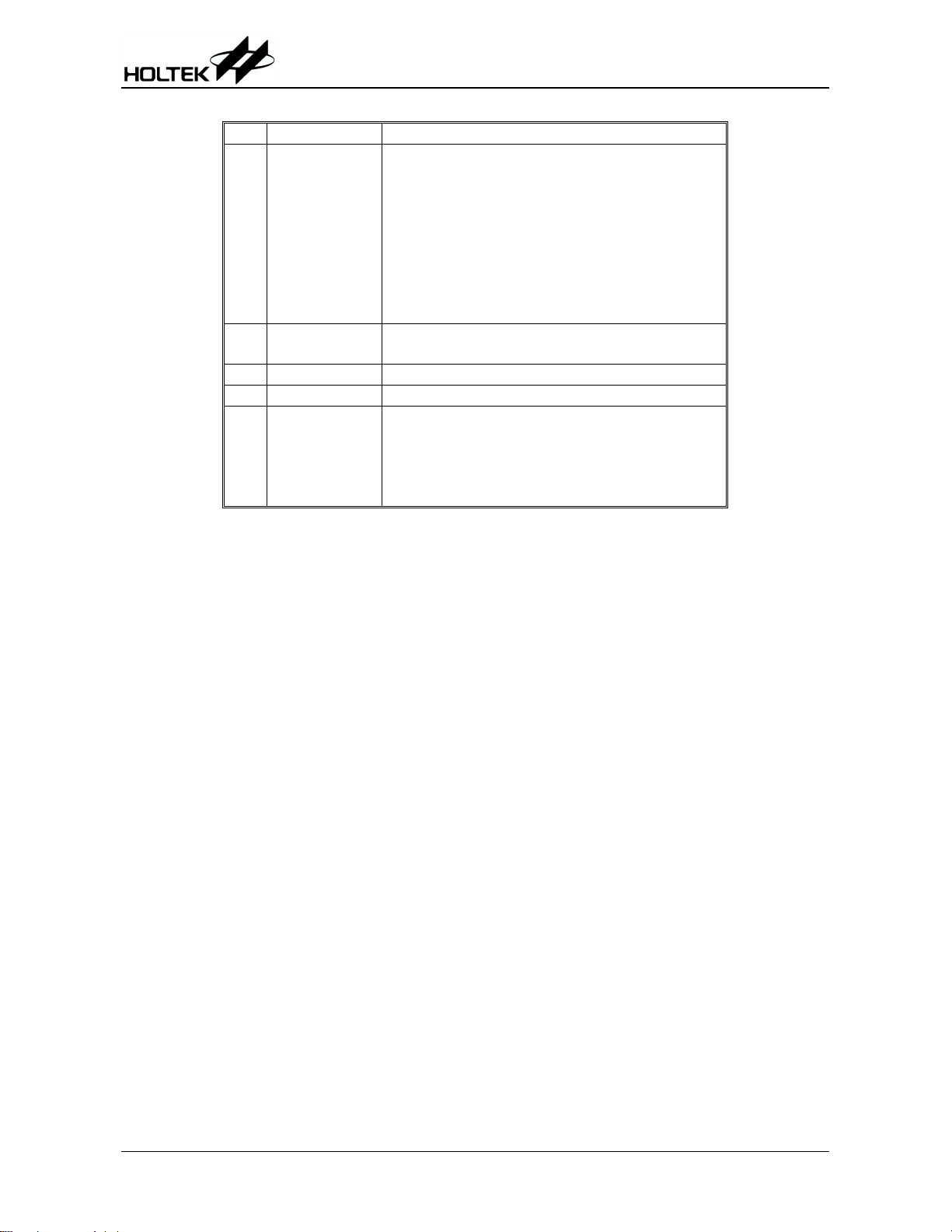
下表列出了所有掩膜选项。所有选项必须正确定义,以保证统正常运行。
编号
编号 功能
编号编号
1
PA0~PA7 唤醒功能(位选择) 带唤醒或不带唤醒
2
PA0~PA7 上拉电阻(端口选择) 带上拉电阻或不带上拉电阻
3
PB0~PB7
4
PC0~PC7
5
PD0 上拉电阻(端口选择) 带上拉电阻或不带上拉电阻
6
WDT 时钟源 WDTOSC 或 f
7 WDT
8 CLR WDT
9 LVR
10
OSC:晶体振荡器或者 RC 振荡器 晶体振荡器或者 RC 振荡器
11
INTC0 触发边沿 关闭、上升沿、下降沿或两者皆可触发
12
INTC1 触发边沿 关闭、上升沿、下降沿或两者皆可触发
功能 描述
功能功能
上拉电阻(端口选择
上拉电阻(端口选择
带上拉电阻或不带上拉电阻
)
带上拉电阻或不带上拉电阻
)
打开或者关闭
1 或者 2 条指令
打开或者关闭
SYS
描述
描述描述
/4
HT45R36
Rev. 1.00 24 2006-09-28

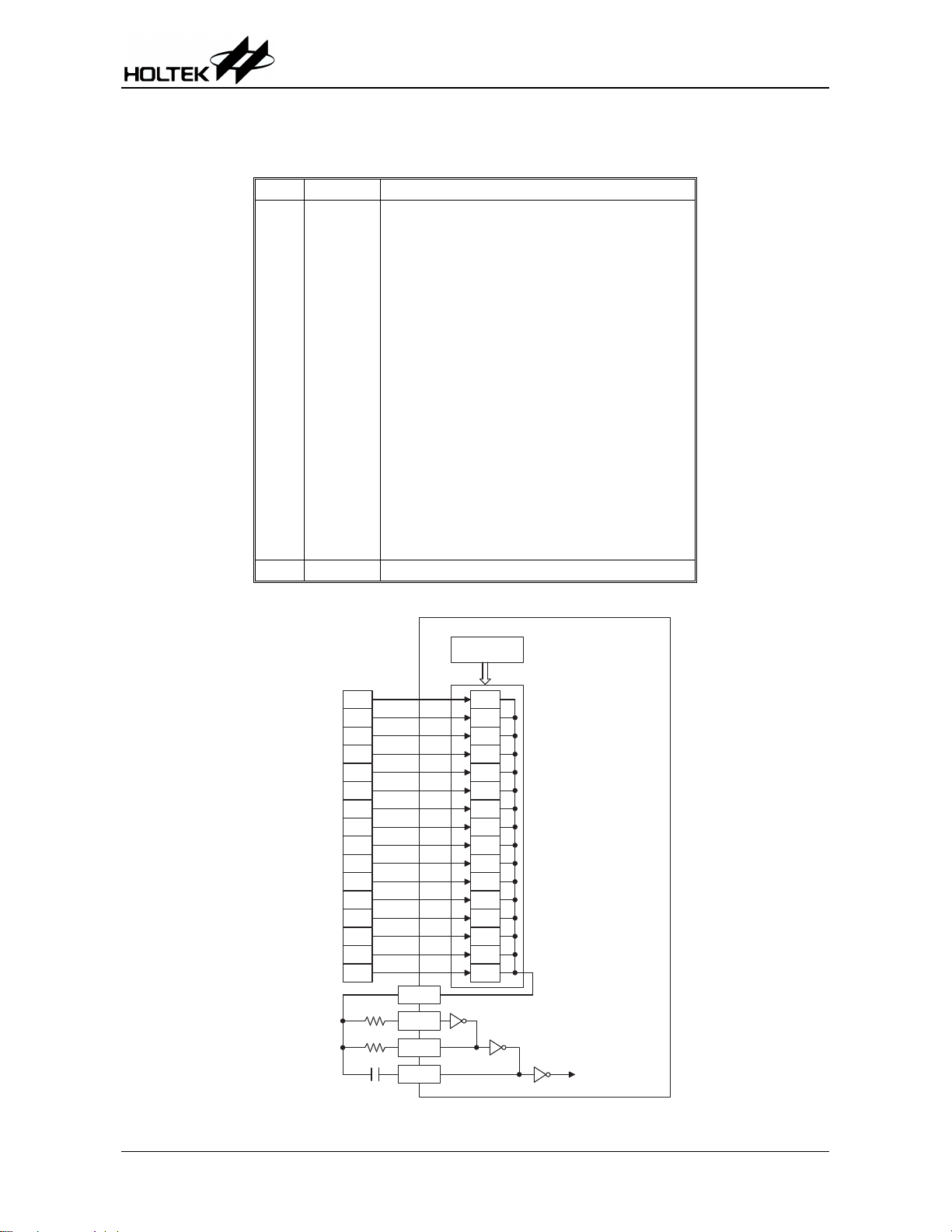
应用电路
应用电路
应用电路应用电路
R-F 型应用电路
型应用电路
型应用电路型应用电路
1 0 0 k
W
0 . 1mF
C i r c u i t
S e e R i g h t S i d e
C-F 型应用电路
型应用电路 1
型应用电路型应用电路
1 0 0 k
W
0 . 1mF
C i r c u i t
S e e R i g h t S i d e
V
O S C
V
O S C
D D
D D
0 . 0 1mF *
1 0 k
0 . 1mF *
0 . 0 1mF *
1 0 k
0 . 1mF *
HT45R36
P B 0 ~ P B 7
H T 4 5 R 3 6
H T 4 5 R 3 6
P C 0 ~ P C 7
P A 0 / I N T 0
P A 1 / I N T 1
P A 2 / T M R
P A 3 ~ P A 7
P D 0
R C 1
R C 2
R C 1 6
R R E F
R C O U T
C R E F
P B 0 ~ P B 7
P C 0 ~ P C 7
P A 0 / I N T 0
P A 1 / I N T 1
P A 2 / T M R
P A 3 ~ P A 7
P D 0
R C 1
R C 2
R C 1 6
C R E F
R C O U T
R R E F
V D D
R E S
W
V S S
O S C 1
O S C 2
V D D
R E S
W
V S S
O S C 1
O S C 2
L E D D i s p l a y
V
D D
R
1
s e n s o r
R
2
s e n s o r
R
1 6
s e n s o r
* R
I N
* C
R
O S C
4 7 0 p F
C 1
C 2
R C S y s t e m O s c i l l a t o r
< R
2 4 k
O S C 1
f
/ 4
S Y S
O S C 2
O S C 1
C r y s t a l S y s t e m O s c i l l a t o r
F o r t h e v a l u e s ,
s e e t a b l e b e l o w
O S C 2
R 1
O S C C i r c u i t
< 1 M
O S C
W
W
L E D D i s p l a y
V
D D
C
1
s e n s o r
C
2
s e n s o r
C
1 6
s e n s o r
* C
I N
* R
R
O S C
4 7 0 p F
f
/ 4
S Y S
C 1
C 2
R 1
R C S y s t e m O s c i l l a t o r
2 4 k
O S C 1
O S C 2
O S C 1
O S C 2
O S C C i r c u i t
W
C r y s t a l S y s t e m O s c i l l a t o r
F o r t h e v a l u e s ,
s e e t a b l e b e l o w
< R
< 1 M
O S C
W
Rev. 1.00 25 2006-09-28

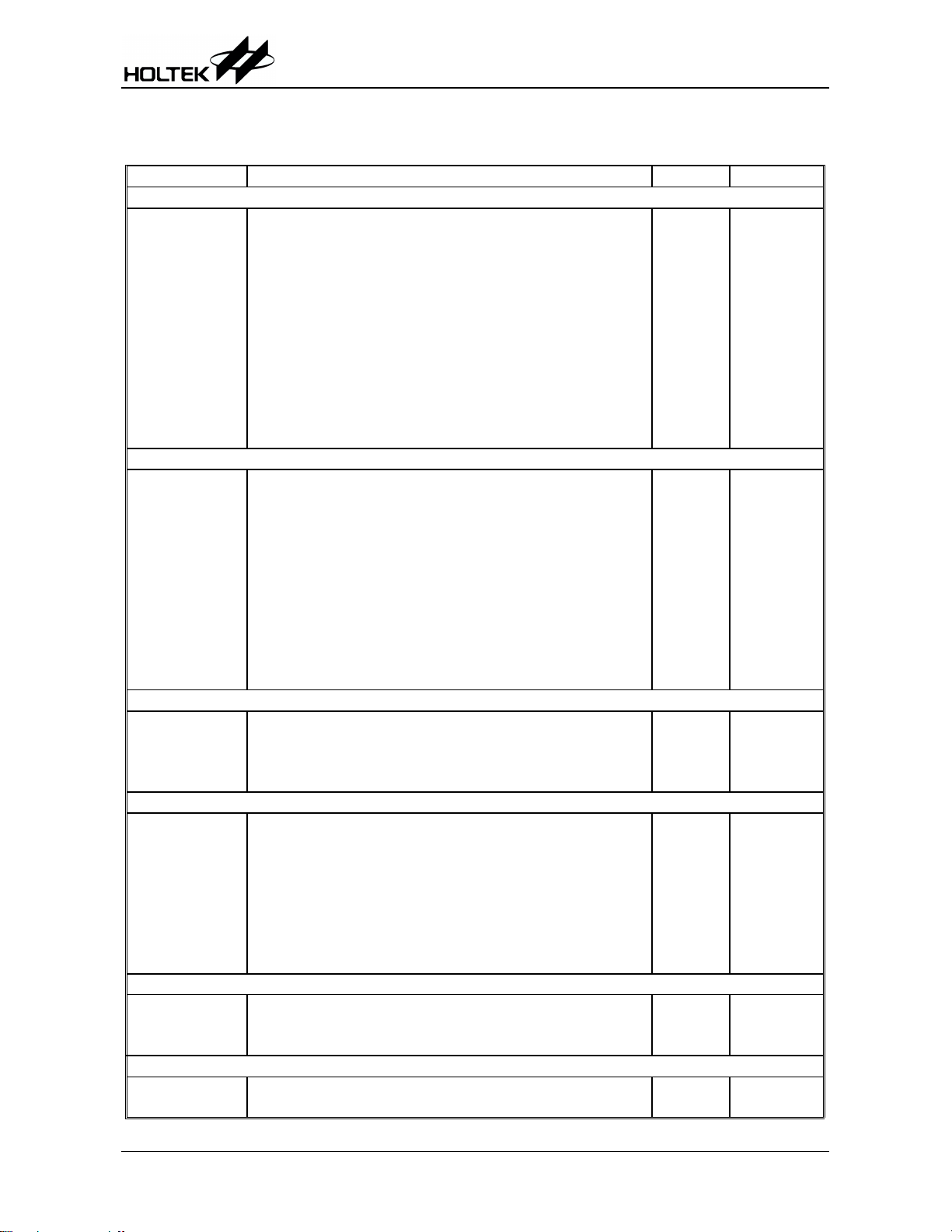
C-F 型应用电路
型应用电路 2
型应用电路型应用电路
V
D D
0 . 0 1mF *
1 0 0 k
W
0 . 1mF
1 0 k
0 . 1mF *
O S C
C i r c u i t
S e e R i g h t S i d e
V D D
R E S
W
V S S
O S C 1
O S C 2
H T 4 5 R 3 6
P B 0 ~ P B 7
P C 0 ~ P C 7
P A 0 / I N T 0
P A 1 / I N T 1
P A 2 / T M R
P A 3 ~ P A 7
P D 0
R C 1
R C 2
R C 1 6
R C O U T
R R E F
C R E F
C
C
C
I N
下表是不同晶体频率时,C1、C2和R1的不同取值。
晶体或共振器
晶体或共振器
晶体或共振器晶体或共振器
4MHz晶体 10pF 12kΩ
8MHz 晶体 10pF 4.3kΩ
4MHz
8MHz
10pF 10kΩ
共振器
10pF 4.7kΩ
共振器
3.58MHz晶振 10pF 12kΩ
3.58MHz 共振器 25pF 10kΩ
2MHz晶体 25pF 15kΩ
2MHz
35pF 15kΩ
共振器
1MHz晶体 68pF 15kΩ
480kHz
455kHz
429kHz
400kHz
300pF 12kΩ
共振器
300pF 12kΩ
共振器
300pF 12kΩ
共振器
300pF 12kΩ
共振器
R1 的作用是在低电压的时候确保关闭振荡,此低电压值低于单片机的最低工作电压。需要注意的是如
果 LVR 使能,可以不加 R1。
C1
注: 电阻和电容值选取的原则是使 VDD 保持稳定并在
“*”为了避免噪声干扰,连接
引脚的线请尽可能地短
RES
电阻“*R”和电容“*C”需要注意 RC OSC 频率。
R
C
sensor
sensor
1~ R
1~ C
16 为电阻传感器
sensor
16 为电容传感器
sensor
s e n s o r
s e n s o r
s e n s o r
* R
* C
L E D D i s p l a y
1
2
1 6
V
D D
R
O S C
4 7 0 p F
C 1
C 2
f
/ 4
S Y S
R 1
R C S y s t e m O s c i l l a t o r
2 4 k
O S C 1
O S C 2
O S C 1
O S C 2
O S C C i r c u i t
W
C r y s t a l S y s t e m O s c i l l a t o r
F o r t h e v a l u e s ,
s e e t a b l e b e l o w
< R
< 1 M
O S C
C2 R1
、、、、
置为高以前把工作电压保持在允许的范围内。
RES
W
HT45R36
Rev. 1.00 26 2006-09-28
HT45R36
指令集摘要
指令集摘要
指令集摘要指令集摘要
助记符
助记符 说明
助记符助记符
算算算算术运算
术运算
术运算术运算
ADD A,[m]
ADDM A,[m]
ADD A,x
ADC A,[m]
ADCM A,[m]
SUB
A,x
SUB A,[m]
SUBM A,[m]
SBC
A,[m]
SBCM A,[m]
DAA [m]
ACC 与数据存储器相加,结果放入 ACC
ACC 与数据存储器相加,结果放入数据存储器
ACC 与立即数相加,结果放入 ACC
与数据存储器、进位标志相加,结果放入
ACC
ACC 与数据存储器、进位标志相加,结果放入数据存储器
ACC 与立即数相减,结果放入 ACC
ACC 与数据存储器相减,结果放入 ACC
ACC 与数据存储器相减,结果放入数据存储器
ACC 与数据存储器、进位标志相减,结果放入 ACC
与数据存储器、进位标志相减,结果放入数据存储器
ACC
将加法运算中放入 ACC 的值调整为十进制数,并将结果放
入数据存储器
逻辑运算
逻辑运算
逻辑运算逻辑运算
AND A,[m]
OR
A,[m]
XOR A,[m]
ANDM A,[m]
ORM A,[m]
XORM A,[m]
AND A,x
OR
A,x
XOR A,x
CPL [m]
CPLA [m]
递增和递减
递增和递减
递增和递减递增和递减
INCA [m]
INC [m]
DECA [m]
DEC [m]
移位
移位
移位移位
RRA [m]
RR [m]
RRCA [m]
RRC [m]
RLA [m]
RL [m]
RLCA [m]
RLC [m]
数据传送
数据传送
数据传送数据传送
MOV A,[m]
MOV [m],A
MOV A,x
位运算
位运算
位运算位运算
CLR [m].i
SET [m].i
与数据存储器做“与”运算,结果放入
ACC
ACC 与数据存储器做“或”运算,结果放入 ACC
ACC 与数据存储器做“异或”运算,结果放入 ACC
ACC 与数据存储器做“与”运算,结果放入数据存储器
ACC 与数据存储器做“或”运算,结果放入数据存储器
ACC 与数据存储器做“异或”运算,结果放入数据存储器
与立即数做“与”运算,结果放入
ACC
ACC 与立即数做“或”运算,结果放入 ACC
ACC 与立即数做“异或”运算,结果放入 ACC
对数据存储器取反,结果放入数据存储器
对数据存储器取反,结果放入 ACC
递增数据存储器,结果放入 ACC
递增数据存储器,结果放入数据存储器
递减数据存储器,结果放入 ACC
递减数据存储器,结果放入数据存储器
数据存储器右移一位,结果放入 ACC
数据存储器右移一位,结果放入数据存储器
带进位将数据存储器右移一位,结果放入 ACC
带进位将数据存储器右移一位,结果放入数据存储器
数据存储器左移一位,结果放入 ACC
数据存储器左移一位,结果放入数据存储器
带进位将数据存储器左移一位,结果放入 ACC
带进位将数据存储器左移一位,结果放入数据存储器
将数据存储器送至 ACC
将 ACC 送至数据存储器
将立即数送至 ACC
清除数据存储器的位
置位数据存储器的位
说明 指令周期
说明说明
指令周期 影响标志位
指令周期指令周期
1 Z,C,AC,OV
(1)
1
Z,C,AC,OV
1 Z,C,AC,OV
ACC
1 Z,C,AC,OV
(1)
1
Z,C,AC,OV
1 Z,C,AC,OV
1 Z,C,AC,OV
(1)
1
Z,C,AC,OV
1 Z,C,AC,OV
(1)
1
Z,C,AC,OV
(1)
1
C
ACC
1 Z
1 Z
1 Z
(1)
1
Z
(1)
1
Z
(1)
1
Z
ACC
1 Z
1 Z
1 Z
(1)
1
Z
1 Z
1 Z
(1)
1
Z
1 Z
(1)
1
Z
1
(1)
1
1 C
(1)
1
C
1
(1)
1
1 C
(1)
1
C
1
(1)
1
1
(1)
1
(1)
1
影响标志位
影响标志位影响标志位
无
无
无
无
无
无
无
无
无
Rev. 1.00 27 2006-09-28

HT45R36
助记符
助记符 说明
助记符助记符
转移
转移
转移转移
JMP
addr
SZ [m]
SZA [m]
SZ [m].i
SNZ [m].i
SIZ [m]
SDZ [m]
SIZA [m]
SDZA [m]
CALL addr
RET
RET A,x
RETI
查表
查表
查表查表
TABRDC [m]
TABRDL [m]
其它指令
其它指令
其它指令其它指令
NOP
CLR [m]
SET [m]
CLR WDT
CLR WDT1
CLR
WDT2
SWAP [m]
SWAPA [m]
HALT
注: x:立即数
m:数据存储器地址
A:累加器
i:第 0~7 位
addr:程序存储器地址
√:影响标志位
—:不影响标志位
(1)
:如果数据是加载到 PCL 寄存器,则指令执行周期会被延长一个指令周期(四个系统时钟)。
(2)
:如果满足跳跃条件,则指令执行周期会被延长一个指令周期(四个系统时钟);否则指令执行周期不会被延长。
(3):(1)和(2)
(4)
:如果执行 CLR WDT1 或 CLR WDT2 指令后,看门狗定时器被清除,则会影响 TO 和 PDF 标志位;否则不会
影响 TO 和 PDF 标志位。
说明 指令周期
说明说明
无条件跳转
如果数据存储器为零,则跳过下一条指令
数据存储器送至 ACC,如果内容为零,则跳过下一条指令
如果数据存储器的第 i 位为零,则跳过下一条指令
如果数据存储器的第 i 位不为零,则跳过下一条指令
递增数据存储器,如果结果为零,则跳过下一条指令
递减数据存储器,如果结果为零,则跳过下一条指令
递增数据存储器,将结果放入 ACC,如果结果为零,则跳
过下一条指令
递减数据存储器,将结果放入 ACC,如果结果为零,则跳
过下一条指令
子程序调用
从子程序返回
从子程序返回,并将立即数放入 ACC
从中断返回
读取当前页的 ROM 内容,并送至数据存储器和 TBLH
读取最后页的 ROM 内容,并送至数据存储器和 TBLH
空指令
清除数据存储器
置位数据存储器
清除看门狗定时器
预清除看门狗定时器
预清除看门狗定时器
交换数据存储器的高低字节,结果放入数据存储器
交换数据存储器的高低字节,结果放入 ACC
进入暂停模式
指令周期 影响标志位
指令周期指令周期
2
1
1
1
1
1
1
1
1
2
2
2
2
2
2
1
1
1
1 TO,PDF
1 TO
1 TO
1
1
1 TO,PDF
影响标志位
影响标志位影响标志位
(2)
(2)
(2)
(2)
(3)
(3)
(2)
(2)
(1)
(1)
(1)
(1)
(1)
(4)
(4)
无
无
无
无
无
无
无
无
无
无
无
无
无
无
无
无
无
无
,PDF
,PDF
无
无
(4)
(4)
Rev. 1.00 28 2006-09-28
HT45R36
ADC A, [m]
说明: 本指令把累加器、数据存储器值以及进位标志相加,结果存放到累加器。
运算过程: ACCACC+[m]+C
影响标志位
ADCM A, [m] 累加器与数据存储器、进位标志相加,结果放入数据存储器
说明: 本指令把累加器、数据存储器值以及进位标志相加,结果存放到存储器。
运算过程: [m]ACC+[m]+C
影响标志位
ADD A, [m] 累加器与数据存储器相加,结果放入累加器
说明:
运算过程: ACCACC+[m]
影响标志位
ADD A, x 累加器与立即数相加,结果放入累加器
说明: 本指令把累加器值和立即数相加,结果存放到累加器。
运算过程: ACCACC+x
影响标志位
ADDM A, [m] 累加器与数据存储器相加,结果放入数据存储器
说明: 本指令把累加器、数据存储器值相加,结果存放到数据存储器。
运算过程: [m]ACC+[m]
影响标志位
AND A, [m]
说明:
运算过程: ACCACC “AND” [m]
影响标志位
累加器与数据存储器、进位标志相加,结果放入累加器
TO PDF OV Z AC C
— — √ √ √ √
TO PDF OV Z AC C
— — √ √ √ √
本指令把累加器、数据存储器值相加,结果存放到累加器。
TO PDF OV Z AC C
— — √ √ √ √
TO PDF OV Z AC C
— — √ √ √ √
TO PDF OV Z AC C
— — √ √ √ √
累加器与数据存储器做“与”运算,结果放入累加器
本指令把累加器值、数据存储器值做逻辑与,结果存放到累加器。
TO PDF OV Z AC C
— — — √ — —
Rev. 1.00 29 2006-09-28

HT45R36
AND A, x
说明: 本指令把累加器值、立即数做逻辑与,结果存放到累加器。
运算过程: ACCACC “AND” x
影响标志位
ANDM A, [m] 累加器与数据存储器做“与”运算,结果放入数据存储器
说明: 本指令把累加器值、数据存储器值做逻辑与,结果存放到数据存储器。
运算过程: [m]ACC “AND” [m]
影响标志位
CALL addr 子程序调用
说明:
运算过程: StackPC+1
PC addr
影响标志位
CLR [m] 清除数据存储器
说明: 本指令将数据存储器内的数值清零。
运算过程: [m] 00H
影响标志位
CLR [m] . i
说明:
运算过程: [m].i 0
影响标志位
CLR WDT 清除看门狗定时器
说明: 本指令清除 WDT 计数器(从 0 开始重新计数),暂停标志位(PDF)和看门狗溢出标志位(TO)
运算过程: WDT 00H
PDF&TO 0
影响标志位
累加器与立即数做“与”运算,结果放入累加器
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
本指令直接调用地址所在处的子程序,此时程序计数器加一,将此程序计数器值存到堆
栈寄存器中,再将子程序所在处的地址存放到程序计数器中。
TO PDF OV Z AC C
—
TO PDF OV Z AC C
— — — — — —
将数据存储器的第 i 位清“0”
本指令将数据存储器内第i位值清零。
TO PDF OV Z AC C
— — — — — —
也被清零。
TO PDF OV Z AC C
—
0 0
—
— — — —
—
—
—
Rev. 1.00 30 2006-09-28
HT45R36
CLR WDT1
说明: 必须搭配 CLR WDT2 一起使用,才可清除 WDT 计时器(从 0 开始重新计数)。当程序只
运算过程: WDT 00H*
PDF&TO 0*
影响标志位
CLR WDT2
说明:
运算过程: WDT 00H*
PDF&TO 0*
影响标志位
CPL [m]
说明: 本指令是将数据存储器内保存的数值取反。
运算过程:
影响标志位
CPLA [m] 对数据存储器取反,结果放入累加器
说明: 本指令是将数据存储器内保存的值取反后,结果存放在累加器中。
运算过程: ACC [m]
影响标志位
[m] [m]
预清除看门狗定时器
执行过该指令,没有执行 CLR WDT2 时,系统只会不会将暂停标志位(PDF)和计数溢出
位(TO)清零,PDF 与 TO 保留原状态不变。
TO PDF OV Z AC C
0* 0*
预清除看门狗定时器
必须搭配
执行过该指令,没有执行 CLR WDT1 时,系统只会不会将暂停标志位(PDF)和计数溢出
位(TO)清零,PDF 与 TO 保留原状态不变。
对数据存储器取反,结果放入数据存储器
CLR WDT1
TO PDF OV Z AC C
0* 0*
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
一起使用,才可清除
— — — —
计时器(从0开始重新计数)。当程序只
WDT
— — — —
Rev. 1.00 31 2006-09-28
HT45R36
DAA [m]
说明 本指令将累加器高低四位分别调整为 BCD 码。如果低四位的值大于“9”或 AC=1,那
操作 如果 ACC.3~ACC.0 > 9 或 AC=1
否则 [m].3~[m].0 (ACC.3~ACC.0 ),AC1=0
并且
如果 ACC.7~ACC.4+AC1 > 9 或 C=1
那么 [m].7~[m].4 (ACC.7~ACC.4 )+6+ AC1,C=1
否则 [m].7~[m].4 (ACC.7~ACC.4 )+ AC1,C=C
影响标志位
DEC [m] 数据存储器的内容减 1,结果放入数据存储器
说明: 本指令将数据存储器内的数值减一再放回数据存储器。
运算过程: [m] [m]-1
影响标志位
DECA [m] 数据存储器的内容减 1,结果放入累加器
说明:
运算过程: ACC [m]-1
影响标志位
HALT 进入暂停模式
说明: 本指令终止程序执行并关掉系统时钟,RAM 和寄存器内的数值保持原状态,WDT 计数
运算过程: PC PC+1
PDF 1
TO 0
影响标志位
将加法运算后放入累加器的值调整为十进制数,并将结果放入数据存储器
么
值保持不变。如果高四位的值大于“9”或 C=1,那么 BCD 调整就执行对原值加“6”
再加 AC1,并把 C 置位;否则 BCD 调整就执行对原值加 AC1,C 的值保持不变。结果
存放到数据存储器中,只有进位标志位(C)受影响。
那么
本指令将存储器内的数值减一,再放到累加器。
器清“0”,暂停标志位(PDF)被设为 1, WDT 计数溢出位(TO)被清为 0。
调整就执行对原值加“6”,并且内部进位标志
BCD
[m].3~[m].0 (ACC.3~ACC.0 )+6,AC1= AC
TO PDF OV Z AC C
— — — — — √
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
0 1
— — — —
AC1= AC
,即AC求反;否则原
Rev. 1.00 32 2006-09-28

HT45R36
INC [m]
说明: 本指令将数据存储器内的数值加一,结果放回数据存储器。
运算过程: [m] [m]+1
影响标志位
INCA [m] 数据存储器的内容加 1,结果放入数据存储器
说明: 本指令是将存储器内的数值加一,结果放到累加器。
运算过程: ACC [m]+1
影响标志位
JMP addr 无条件跳转
说明:
运算过程: PC addr
影响标志位
MOV A, [m] 将数据存储器送至累加器
说明: 本指令是将数据存储器内的数值送到累加器内。
运算过程: ACC [m]
影响标志位
MOV A, x 将立即数送至累加器
说明: 本指令是将立即数送到累加器内。
运算过程: ACC x
影响标志位
MOV [m], A
说明:
运算过程: [m] ACC
影响标志位
数据存储器的内容加 1,结果放入数据存储器
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
本指令是将要跳到的目的地直接放到程序计数器内。
TO PDF OV Z AC C
— — — — — —
TO PDF OV Z AC C
— — — — — —
TO PDF OV Z AC C
— — — — — —
将累加器送至数据存储器
本指令是将累加器值送到数据存储器内。
TO PDF OV Z AC C
— — — — — —
Rev. 1.00 33 2006-09-28

HT45R36
NOP
说明: 本指令不作任何运算,而只将程序计数器加一。
运算过程: PC PC+1
影响标志位
OR A, [m] 累加器与数据存储器做“或”运算,结果放入累加器
说明: 本指令是把累加器、数据存储器值做逻辑或,结果放到累加器。
运算过程: ACCACC “OR” [m]
影响标志位
OR A, x 累加器与立即数做“或”运算,结果放入累加器
说明:
运算过程: ACCACC “OR” x
影响标志位
ORM A, [m] 累加器与数据存储器做“或”运算,结果放入数据存储器
说明: 本指令是把累加器值、存储器值做逻辑或,结果放到数据存储器。
运算过程: [m]ACC “OR” [m]
影响标志位
RET 从子程序返回
说明: 本指令是将堆栈寄存器中的程序计数器值送回程序计数器。
运算过程: PC Stack
影响标志位
RET A, x
说明:
运算过程: PC Stack
ACC x
影响标志位
空指令
TO PDF OV Z AC C
— — — — — —
TO PDF OV Z AC C
— — — √ — —
本指令是把累加器值、立即数做逻辑或,结果放到累加器。
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — — — —
从子程序返回,并将立即数放入累加器
本指令是将堆栈寄存器中的程序计数器值送回程序计数器,并将立即数送回累加器。
TO PDF OV Z AC C
—
—
—
—
—
—
Rev. 1.00 34 2006-09-28

HT45R36
RETI
说明: 本指令是将堆栈寄存器中的程序计数器值送回程序计数器,与 RET 不同的是它使用在
运算过程: PC Stack
EMI 1
影响标志位
RL [m]
说明:
运算过程: [m].0 [m].7, [m].(i+1) [m].i;(i=0~6)
影响标志位
RLA [m] 数据存储器左移一位,结果放入累加器
说明: 本指令是将存储器内的数值左移一位,第 7 位移到第 0 位,结果送到累加器,而数据存
运算过程:
影响标志位
RLC [m]
说明: 本指令是将存储器内的数值与进位标志左移一位,第 7 位取代进位标志,进位标志移到
运算过程: [m].(i+1) [m].i; (i=0~6)
[m].0 C
C [m].7
影响标志位
RLCA [m]
说明:
运算过程: ACC.(i+1) [m].i; (i=0~6)
ACC.0 C
C [m].7
影响标志位
ACC.0 [m].7, ACC.(i+1) [m].i; (i=0~6)
从中断返回
中断程序结束返回时,它还会将中断控制寄存器 INTC 的 0 位(EMI)中断允许位置 1,允
许中断服务。
TO PDF OV Z AC C
— — — — — —
数据存储器左移一位,结果放入数据存储器
本指令是将数据存储器内的数值左移一位,第7位移到第0位,结果送回数据存储器。
TO PDF OV Z AC C
— — — — — —
储器内的数值不变。
TO PDF OV Z AC C
— — — — — —
带进位将数据存储器左移一位,结果放入数据存储器
第 0 位,结果送回数据存储器。
TO PDF OV Z AC C
— — — — — √
带进位将数据存储器左移一位,结果放入累加器
本指令是将存储器内的数值与进位标志左移一位,第七位取代进位标志,进位标志移到
第 0 位,结果送回累加器。
TO PDF OV Z AC C
— — — — — √
Rev. 1.00 35 2006-09-28

HT45R36
RR [m]
说明: 本指令是将存储器内的数值循环右移,第 0 位移到第 7 位,结果送回数据存储器。
运算过程: [m].7 [m].0, [m].i [m].(i+1); (i=0~6)
影响标志位
RRA [m] 数据存储器右移一位,结果放入累加器
说明: 本指令是将数据存储器内的数值循环右移,第 0 位移到第 7 位,结果送回累加器,而数
运算过程: ACC.7 [m].0, ACC.i [m].(i+1); (i=0~6)
影响标志位
RRC [m]
说明: 本指令是将存储器内的数值加进位标志循环右移,第 0 位取代进位标志,进位标志移到
运算过程: [m].i [m].(i+1); (i=0~6)
[m]. 7 C
C [m].0
影响标志位
RRCA [m]
说明: 本指令是将数据存储器内的数值加进位标志循环右移,第 0 位取代进位标志,进位标志
运算过程: ACC.i [m].(i+1); (i=0~6)
ACC.7 C
C [m].0
影响标志位
SBC A,[m]
说明:
运算过程:
影响标志位
ACCACC+[m]+ C
数据存储器右移一位,结果放入数据存储器
TO PDF OV Z AC C
— — — — — —
据存储器内的数值不变。
TO PDF OV Z AC C
— — — — — —
带进位将数据存储器右移一位,结果放入数据存储器
第 7 位,结果送回存储器。
TO PDF OV Z AC C
— — — — — √
带进位将数据存储器右移一位,结果放入累加器
移到第 7 位,结果送回累加器,数据存储器内的数值不变。
TO PDF OV Z AC C
— — — — — √
累加器与数据存储器、进位标志相减,结果放入累加器
本指令是把累加器值减去数据存储器值以及进位标志的取反,结果放到累加器。
TO PDF OV Z AC C
— — √ √ √ √
Rev. 1.00 36 2006-09-28

HT45R36
SBCM A,[m]
说明: 本指令是把累加器值减去数据存储器值以及进位标志取反,结果放到数据存储器。
运算过程:
影响标志位
SDZ [m] 数据存储器减 1,如果结果为“0”,则跳过下一条指令
说明: 本指令是把数据存储器内的数值减 1,判断是否为 0,若为 0 则跳过下一条指令,即如
运算过程:
影响标志位
SDZA [m] 数据存储器减 1,将结果放入累加器,如果结果为“0”,则跳过下一条指令
说明: 本指令是把数据存储器内的数值减 1,判断是否为 0,为 0 则跳过下一行指令并将减完
运算过程: 如果[m]-1=0,跳过下一条指令执行再下一条。
ACC ([m]-1)
影响标志位
SET [m] 置位数据存储器
说明: 本指令是把存储器内的数值每个位置为 1。
运算过程: [m] FFH
影响标志位
SET [m]. i 将数据存储器的第 i 位置“1”
说明: 本指令是把存储器内的数值的第 i 位置为 1。
运算过程:
影响标志位
[m]ACC+[m]+C
[m].i 1
累加器与数据存储器、进位标志相减,结果放入数据存储器
TO PDF OV Z AC C
— — √ √ √ √
果结果为零,放弃在目前指令执行期间所取得的下一条指令,并插入一个空周期用以取
得正确的指令(二个指令周期)。否则执行下一条指令(一个指令周期)。
如果
[m]-1=0
后数据存储器内的数值送到累加器,而数据存储器内的值不变,即若结果为 0,放弃在目
前指令执行期间所取得的下一条指令,并插入一个空周期用以取得正确的指令(二个指令
周期)。否则执行下一条指令(一个指令周期)。
,跳过下一条指令执行再下一条。
TO PDF OV Z AC C
— — — — — —
TO PDF OV Z AC C
— — — — — —
TO PDF OV Z AC C
— — — — — —
TO PDF OV Z AC C
— — — — — —
Rev. 1.00 37 2006-09-28

HT45R36
SIZ [m]
说明: 本指令是把数据存储器内的数值加 1,判断是否为 0。若为 0,跳过下一条指令,即放弃
运算过程: 如果 ([m]+1=0),跳过下一行指令;[m] [m]+1
影响标志位
SIZA 数据存储器加 1,将结果放入累加器,如果结果为“0”,则跳过下一条指令
说明: 本指令是把数据存储器内的数值加 1,判断是否为 0,若为 0 跳过下一条指令,即放弃
运算过程: 如果[m]+1=0,跳过下一行指令;ACC ([m]+1)
影响标志位
SNZ [m]. i 如果数据存储器的第 i 位不为“0”,则跳过下一条指令
说明:
运算过程: 如果 [m].i≠0,跳过下一行指令。
影响标志位
SUB A, [m] 累加器与数据存储器相减,结果放入累加器
说明: 本指令是把累加器值、数据存储器值相减,结果放到累加器。
运算过程: ACCACC+[m]+1
影响标志位
SUB A, x
说明:
运算过程:
影响标志位
ACCACC+x+1
数据存储器加 1,如果结果为“0”,则跳过下一条指令
在目前指令执行期间所取得的下一条指令,并插入一个空周期用以取得正确的指令(二个
指令周期)。否则执行下一条指令(一个指令周期)。
TO PDF OV Z AC C
— — — — — —
在目前指令执行期间所取得的下一条指令,并插入一个空周期用以取得正确的指令(二
个指令周期),并将加完后存储器内的数值送到累加器,而数据存储器的值保持不变。
否则执行下一条指令(一个指令周期)。
TO PDF OV Z AC C
— — — — — —
本指令是判断数据存储器内的数值的第i位,若不为0,则程序计数器再加1,跳过下一
行指令,放弃在目前指令执行期间所取得的下一条指令,并插入一个空周期用以取得正
确的指令(二个指令周期)。否则执行下一条指令(一个指令周期)。
TO PDF OV Z AC C
—
TO PDF OV Z AC C
— — √ √ √ √
累加器与立即数相减,结果放入累加器
本指令是把累加器值、立即数相减,结果放到累加器。
TO PDF OV Z AC C
— — √ √ √ √
—
—
—
—
—
Rev. 1.00 38 2006-09-28

HT45R36
SUBM A, [m]
说明: 本指令是把累加器值、存储器值相减,结果放到存储器。
运算过程:
影响标志位
SWAP [m] 交换数据存储器的高低字节,结果放入数据存储器
说明: 本指令是将数据存储器的低四位和高四位互换,再将结果送回数据存储器。
运算过程: [m].7~[m].4↔[m].3~[m].0
影响标志位
SWAPA [m] 交换数据存储器的高低字节,结果放入累加器
说明:
运算过程: ACC.3~ACC.0 [m].7~[m].4
影响标志位
SZ [m] 如果数据存储器为“0”,则跳过下一条指令
说明: 本指令是判断数据存储器内的数值是否为 0,为 0 则跳过下一行指令,即放弃在目前指
运算过程: 如果 [m] = 0, 跳过下一行指令。
影响标志位
SZA [m]
说明: 本指令是判断存储器内的数值是否为 0,若为 0 则跳过下一行指令,即放弃在目前指令
运算过程:
影响标志位
[m]ACC+[m]+1
累加器与数据存储器相减,结果放入数据存储器
TO PDF OV Z AC C
— — √ √ √ √
TO PDF OV Z AC C
— — — — — —
本指令是将数据存储器的低四位和高四位互换,再将结果送回累加器。
ACC.7~ACC.4 [m].3~[m].0
TO PDF OV Z AC C
— — — — — —
令执行期间所取得的下一条指令,并插入一个空周期用以得正确的指令(二个指令周期)。
否则执行下一条指令(一个指令周期)。
TO PDF OV Z AC C
— — — — — —
数据存储器送至累加器,如果内容为“0”,则跳过下一条指令
执行期间所取得的下一条指令,并插入一个空周期用以得正确的指令(二个指令周期)。
并把存储器内值送到累加器,而存储器的值保持不变。否则执行下一条指令(一个指令周
期)。
如果
[m] = 0
,跳过下一行指令,并
TO PDF OV Z AC C
— — — — — —
ACC [m]。
Rev. 1.00 39 2006-09-28

HT45R36
SZ [m]. i
说明: 本指令是判断存储器内第 i 位值是否为 0,若为 0 则跳过下一行指令,即放弃在目前指
运算过程: 如果 [m].i = 0,跳过下一行指令。
影响标志位
TABRDC [m] 读取 ROM 当前页的内容,并送至数据存储器和 TBLH
说明: 本指令是将表格指针指向程序寄存器当前页,将低字节送到存储器,高字节直接送到
运算过程: [m] 程序存储器低字节
TBLH程序存储器高字节
影响标志位
TABRDL [m] 读取 ROM 最后一页的内容,并送至数据存储器和 TBLH
说明: 本指令是将 TABLE 指针指向程序寄存器最后页,将低字节送到存储器,高字节直接送
运算过程: [m] 程序存储器低字节
TBLH
影响标志位
XOR A, [m]
说明: 本指令是把累加器值、 数据存储器值做逻辑异或,结果放到累加器。
运算过程: ACCACC “XOR” [m]
影响标志位
XORM A, [m] 累加器与数据存储器做“异或”运算,结果放入数据存储器
说明: 本指令是把累加器值、数据存储器值做逻辑异或,结果放到数据存储器。
运算过程: [m]ACC “XOR” [m]
影响标志位
XOR A, x 累加器与数据存储器做“异或”运算,结果放入累加器
说明: 本指令是把累加器值与立即数做逻辑异或,结果放到累加器。
运算过程: ACCACC “XOR” x
影响标志位
Rev. 1.00 40 2006-09-28
如果数据存储器的第 i 位为“0”,则跳过下一条指令
令执行期间所取得的下一条指令,并插入一个空周期用以得正确的指令(二个指令周期)。
否则执行下一条指令(一个指令周期)。
TO PDF OV Z AC C
—
TBLH 寄存器内。
TO PDF OV Z AC C
— — — — — —
到 TBLH 寄存器内。
程序存储器高字节
TO PDF OV Z AC C
— — — — — —
累加器与立即数做“异或”运算,结果放入累加器
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
TO PDF OV Z AC C
— — — √ — —
—
—
—
—
—
HT45R36
封装信息
封装信息
封装信息封装信息
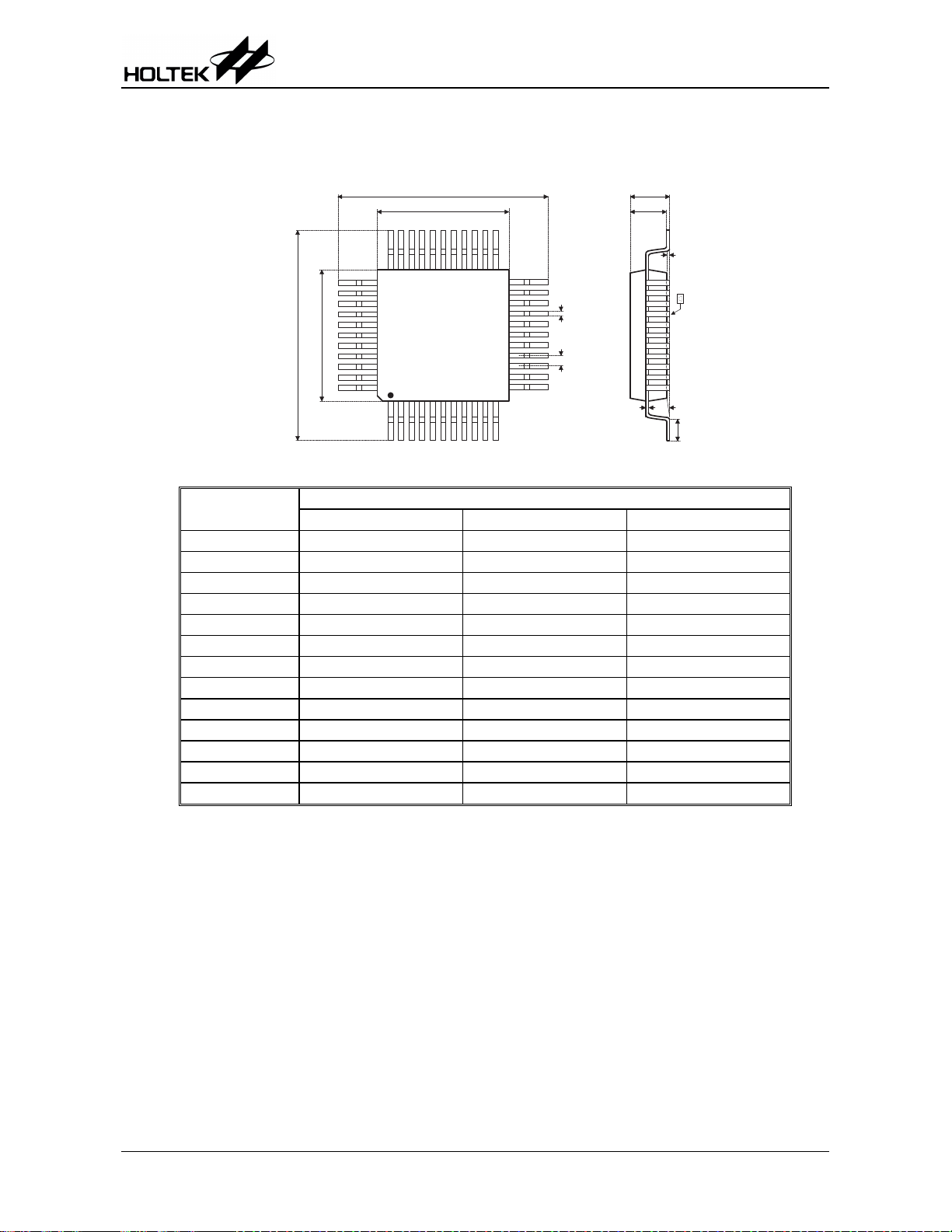
44-pin QFP (10××××10)外形尺寸
外形尺寸
外形尺寸外形尺寸
A
符号
符号
符号符号
A 13
B 9.9
C 13
D 9.9
E
F
G 1.9
H
I 0.25
J 0.73
K 0.1
L
α 0° — 7°
C
D
3 3
3 4
B
4 4
2 3
2 2
F
E
1 2
1 11
H
G
I
L
a
K
J
尺寸
尺寸 (单位
单位::::mm)
尺寸尺寸
单位单位
最小
最小 典型
最小最小
—
—
— —
—
典型 最大
典型典型
—
—
—
—
0.8
0.3
—
最大
最大最大
13.4
10.1
13.4
10.1
—
—
2.2
2.7
—
—
—
0.1
0.5
0.93
0.2
—
Rev. 1.00 41 2006-09-28

52-pin QFP (14××××14)外形尺寸
外形尺寸
外形尺寸外形尺寸
A
B
HT45R36
C
D
3 9
4 0
2 7
2 6
F
E
H
G
I
5 2
1
1 3
1 4
K
J
尺寸
尺寸 (单位
单位::::mm)
尺寸尺寸
符号
符号
符号符号
最小
最小 典型
最小最小
A 17.3
B 13.9
C 17.3
D 13.9
E
F
G 2.5
H
I
J 0.73
K 0.1
—
—
—
—
单位单位
典型 最大
典型典型
—
—
—
—
1
0.4
—
—
0.1
—
—
最大
最大最大
17.5
14.1
17.5
14.1
—
—
3.1
3.4
—
1.03
0.2
α 0° — 7°
Rev. 1.00 42 2006-09-28
盛群半导体股份有限公司
盛群半导体股份有限公司((((总公司
盛群半导体股份有限公司盛群半导体股份有限公司
新竹市科学工业园区研新二路 3 号
电话: 886-3-563-1999
传真: 886-3-563-1189
网站: www.holtek.com.tw
盛群半导体股份有限公司
盛群半导体股份有限公司((((台北业务处
盛群半导体股份有限公司盛群半导体股份有限公司
台北市南港区园区街 3 之 2 号 4 楼之 2
电话: 886-2-2655-7070
传真: 886-2-2655-7373
传真: 886-2-2655-7383 (International sales hotline)
盛扬半导体有限公司
盛扬半导体有限公司((((上海
盛扬半导体有限公司盛扬半导体有限公司
上海宜山路 889 号 2 号楼 7 楼 200233
电话: 021-6485-5560
传真: 021-6485-0313
网站: www.holtek.com.cn
盛扬半导体有限公司
盛扬半导体有限公司((((深圳
盛扬半导体有限公司盛扬半导体有限公司
深圳市南山区科技园科技中三路与高新中二道交汇处生产力大楼 A 单元五楼 518057
电话: 0755-8616-9908,8616-9308
传真: 0755-8616-9722
盛扬半导体有限公司
盛扬半导体有限公司((((北京
盛扬半导体有限公司盛扬半导体有限公司
北京市西城区宣武门西大街甲 129 号金隅大厦 1721 室 100031
电话: 010-6641-0030, 6641-7751, 6641-7752
传真: 010-6641-0125
盛扬半导体有限公司
盛扬半导体有限公司((((成都
盛扬半导体有限公司盛扬半导体有限公司
成都市东大街 97 号香槟广场 C 座 709 室 610016
电话: 028-6653-6590
传真: 028-6653-6591
Holtek Semiconductor (USA), Inc.((((北美业务处
46712 Fremont Blvd., Fremont, CA 94538
电话: 510-252-9880
传真: 510-252-9885
网站: www.holtek.com
Copyright 2007 by HOLTEK SEMICONDUCTOR INC.
使用指南中所出现的信息在出版当时相信是正确的,然而盛群对于说明书的使用不负任何责任。文中提
到的应用目的仅仅是用来做说明,盛群不保证或表示这些没有进一步修改的应用将是适当的,也不推荐
它的产品使用在会由于故障或其它原因可能会对人身造成危害的地方。盛群产品不授权使用于救生、维
生器件或系统中做为关键器件。盛群拥有不事先通知而修改产品的权利,对于最新的信息,请参考我们
的网址 http://www.holtek.com.tw
总公司))))
总公司总公司
台北业务处))))
台北业务处台北业务处
上海业业业业务处
务处))))
上海上海
务处务处
深圳业务处
业务处))))
深圳深圳
业务处业务处
北京业务处
业务处))))
北京北京
业务处业务处
成都业务处
业务处))))
成都成都
业务处业务处
北美业务处))))
北美业务处北美业务处
 Loading...
Loading...