

Page 1

Anybus®CompactCom
Host Application Implementation Guide
HMSI-27-334 1.7 en-US ENGLISH
™
Page 2

Important User Information
Disclaimer
The information in this document is for informational purposes only. Please inform HMS Industrial Networks of any
inaccuracies or omissions found in this document. HMS Industrial Networks disclaims any responsibility or liability
for any errors that may appear in this document.
HMS Industrial Networks reserves the right to modify its products in line with its policy of continuous product
development. The information in this document shall therefore not be construed as a commitment on the part of
HMS Industrial Networks and is subject to change without notice. HMS Industrial Networks makes no commitment
to update or keep current the information in this document.
The data, examples and illustrations found in this document are included for illustrative purposes and are only
intended to help improve understanding of the functionality and handling of the product. In view of the wide range
of possible applications of the product, and because of the many variables and requirements associated with any
particular implementation, HMS Industrial Networks cannot assume responsibility or liability for actual use based on
the data, examples or illustrations included in this document nor for any damages incurred during installation of the
product. Those responsible for the use of the product must acquire sufficient knowledge in order to ensure that the
product is used correctly in their specific application and that the application meets all performance and safety
requirements including any applicable laws, regulations, codes and standards. Further, HMS Industrial Networks will
under no circumstances assume liability or responsibility for any problems that may arise as a result from the use of
undocumented features or functional side effects found outside the documented scope of the product. The effects
caused by any direct or indirect use of such aspects of the product are undefined and may include e.g. compatibility
issues and stability issues.
®
Anybus
CompactCom
is a registered trademark of HMS Industrial Networks.
™
is a trademark of HMS Industrial Networks.
All other trademarks are the property of their respective holders.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 3

Table of Contents
Page
1 Preface ................................................................................................................................. 3
1.1 About This Document ........................................................................... ............................3
1.2 Related Documents ............................ .............................................. ................................ 3
1.3 Document history ............................................................................................................ 3
1.4 Document Conventions ......................................... .............................................. .............. 4
2 Introduction......................................................................................................................... 5
2.1 Overview ........................................................................................................................6
2.2 Preparations ................................................................................................................... 7
3 Step One .............................................................................................................................. 8
3.1 System Adaptation and Application Development..................................................................8
3.2 System Set-up ................................................................................................................. 8
3.3 Anybus CompactCom Set-up .............................................................................................. 9
3.4 System Adaptation Functions ........................................................................................... 14
3.5 Object Configuration ... ......................................... .......................................................... 18
3.6 Example Application .................... .............................................. ..................................... 18
4 Step Two ............................................................................................................................ 21
4.1 Adaptations and Customizations .............................................. ......................................... 21
A Software Overview............................................................................................................ 41
A.1 Folders............ ............................................................................................................. 41
A.2 Root Files ..................................................................................................................... 41
A.3 CompactCom Driver Interface (Read Only).......................................................................... 41
A.4 Internal Driver Files (Read Only) ....................................................................................... 42
A.5 System Adaptation Files ........... .............................................. ......................................... 43
B API ...................................................................................................................................... 44
B.1 API Documentation .................. ..... ......................................... ........................................ 44
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 4
C Host Application State Machine....................................................................................... 47
D 30- and 40-series Modules in the Same Application....................................................... 51
D.1 Hardware Design Considerations ...................................................................................... 51
D.2 Module Identification ..................................................................................................... 51
D.3 Enable Supported Communication Interfaces.................................. ..... ............................... 52
D.4 Select Operating Mode ................................................................................................... 52
D.5 Message Data Size ......................................................................................................... 53
D.6 Process Data Size ........................................................................................................... 53
D.7 Supported Data Types............................ .............................................. ........................... 53
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 5
Preface 3 (54)
1 Preface
1.1 About This Document
This document describes the host application example code. It provides a guide for making a
simple implementation and tips for further development.
For additional related documentation and file downloads, please visit www.anybus.com/support.
1.2 Related Documents
Document
Anybus CompactCom 40 Software Design Guide
1.3 Document history
Author
HMS HMSI-216-125
Document ID
Version
1.00 2015-11-20
1.10 2016-02-05
1.2 2017-01-10
1.3 2018-01-23
1.4 2018-05-31
1.5 2018-10-16
1.6 2019-02-25
1.7 2020-03-09
Date
Description
New document
Fully revised revision
Converted to DOX
Major updates
Added disclaimer
Changed document type
Updated API description
Added appendix on 30- and 40-series modules in the same application
Minor updates
Minor updates to fit latest software release
Rebranding
Minor updates
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 6

Preface 4 (54)
1.4 Document Conventions
Numbered lists indicate tasks that should be carried out in sequence:
1. First do this
2. Then do this
Bulleted lists are used for:
• Tasks that can be carried out in any order
• Itemized information
► An action
→ and a result
User interaction elements (buttons etc.) are indicated with bold text.
Program code and script examples
Cross-reference within this document: Document Conventions, p. 4
External link (URL): www.hms-networks.com
WARNING
Instruction that must be followed to avoid a risk of death or serious injury.
Caution
Instruction that must be followed to avoid a risk of personal injury.
Instruction that must be followed to avoid a risk of reduced functionality and/or damage
to the equipment, or to avoid a network security risk.
Additional information which may facilitate installation and/or operation.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 7

Introduction 5 (54)
2 Introduction
When starting an implementation of the Anybus CompactCom 30 or the Anybus CompactCom
40, host application example code is available to speed up the development process. The host
application example code includes a driver, which acts as glue between the Anybus CompactCom
module and the host application. The driver has an API (Application Programming Interface),
which defines a common interface to the driver. Also included in the example code is an example
application which makes use of the API to form an application that can be used as a base for the
final product.
This guide is developed to describe a step-by-step implementation of the Anybus CompactCom driver and
example application. The programmer is requested to have basic knowledge in the Anybus CompactCom
object model and the communication protocol before starting the implementation.
This document is based on the contents of version 3.06 of the host application example code.
The guide is divided into two steps:
Step One: The adaptations needed for the target hardware are done here and a simple application is
developed. The goal with this step is to make sure that the hardware specific code is working and that it
is possible to connect to the network and exchange a limited amount of data.
Step Two: The code is adapted to the target product. The goal with this step is to customize the code
and add to it, to configure the data that will be sent on the network. After this, the application can be
further extended and improved.
The driver is fully OS independent and it can even be used without an operating system, if
required. Furthermore, it can be used for Anybus CompactCom 30 modules as well as Anybus
CompactCom 40 modules. The driver supports multiple operating modes, where selection of one
of the implemented modes can be made at runtime.
It is possible to use modules from the 30- and the 40-series in the same application, see 30- and
40-series Modules in the Same Application, p. 51.
The host application example code is available in different versions for different platforms. When
writing this guide, the platforms depicted below are available.
Each folder contains all files for a specific platform/development environment.
Platform
Generic
Xilinx, MicroZed
ST, STM3240-EVAL
NXP, TWRP1025
HMS, USB II Board Visual Studio Used for the HMS Starter Kit hardware (USB board)
Reference Project/Tool Chain
-
GNU
Keil µVision Used for the STM3240-EVAL evaluation platform
IAR Embedded Workbench Used for the STM3240-EVAL evaluation platform
Code Warrior Used for the NXP TWRP1025 evaluation platform
Description
Can be ported to any platform
Used for the Microzed evaluation platform with
Anybus IP
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 8
Introduction 6 (54)
Host Applicaon Objects ADI/Process Data
CompactCom Applicaon Handler Main Loop
Example Applicaon
API
CompactCom Driver
System Adaptaon Layer
Anybus Physical Interface
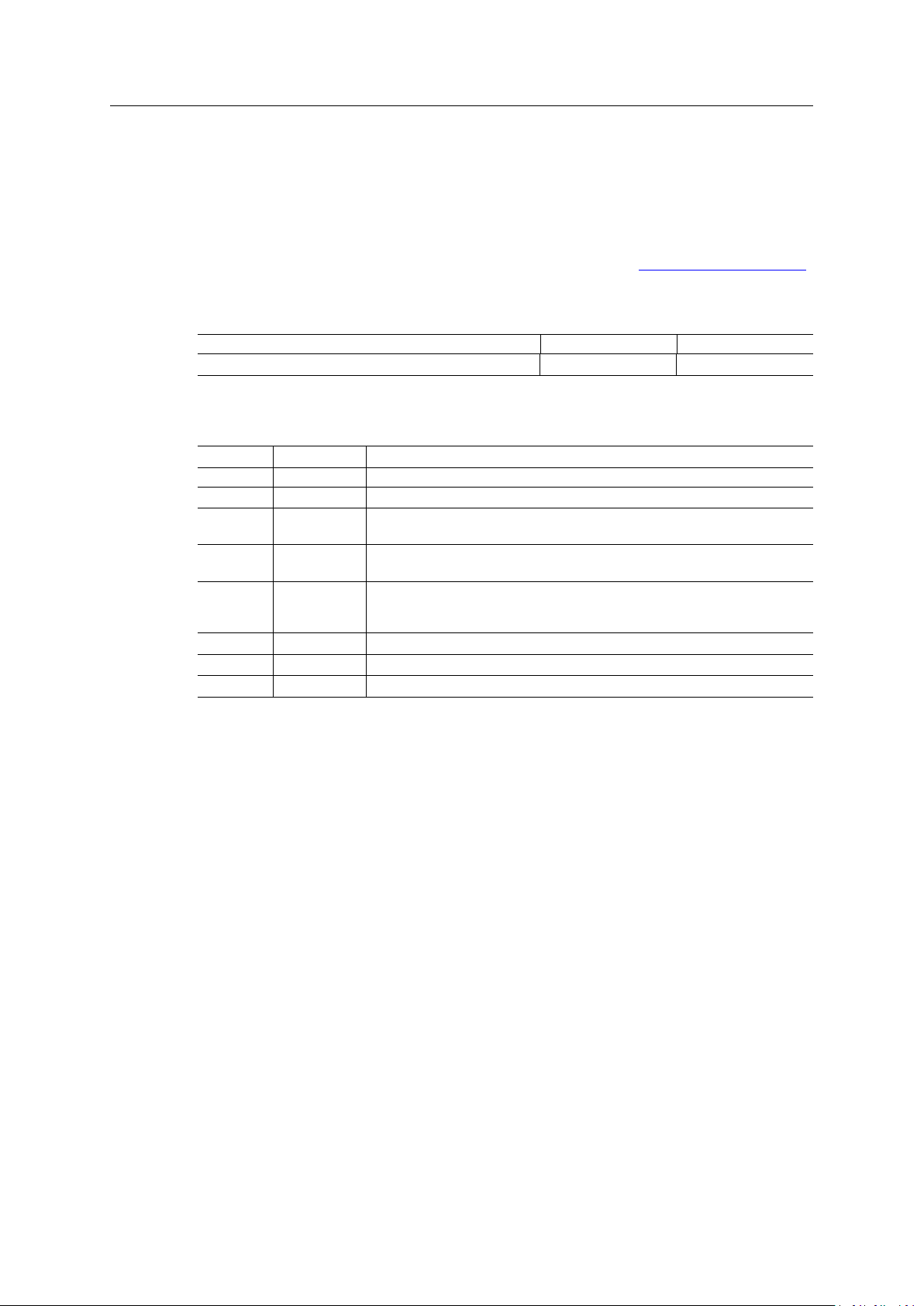
2.1 Overview
Parts of the driver code need to be adapted to the host application platform. This generally
includes functions which access the Anybus host interface, or functions which need to be
adapted to integrate the driver into the host system. The figure below shows the different parts
of the host application example code.
Fig. 1 Software overview
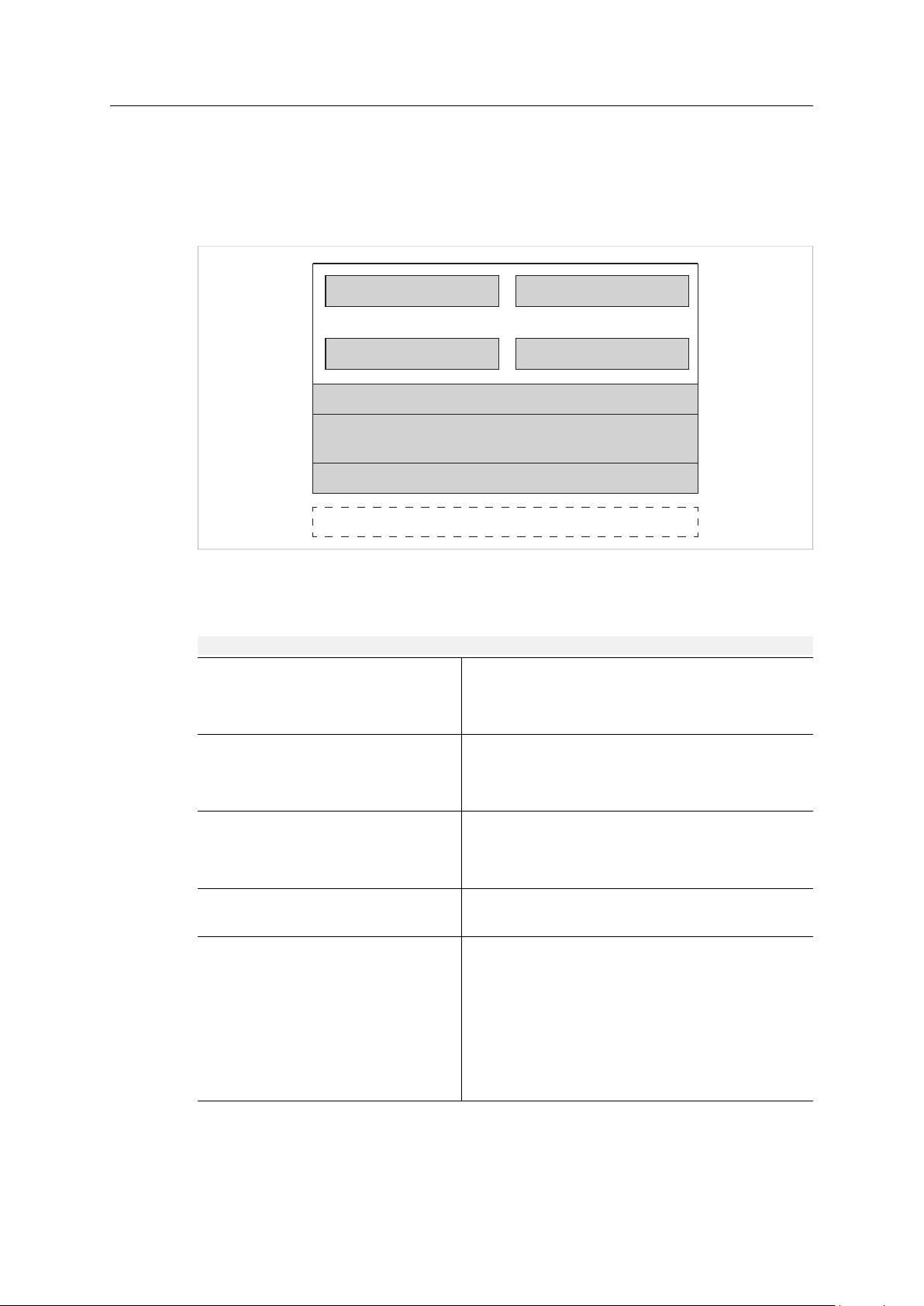
The host application example code is divided into five different folders depending on the
functionality and whether the files need to be adapted or not by the user.
Folder Structure
/abcc_abp (part of the driver - read only)
/abcc_drv (part of the driver - read only)
/abcc_adapt
/abcc_obj
/example_app
Contains all Anybus object and communication protocol definitions.
Files may be updated when new Anybus CompactCom releases are
available.
These files are read only and must not be changed in any way by
the user.
Contains source and header files for the driver.
Files may be updated when new Anybus CompactCom releases are
available.
These files are read only and must not be changed in any way by
the user.
Contains configuration files.
These files must be modified by the user to adapt the driver and
the example code to the system environment. Note: If using
example code adjusted to a specific platform, most of the
adaptations needed in this folder are already completed.
Includes all Anybus host application object implementations.
These files can be modified if needed, for optimization and/or
additional features.
Example application including:
– Main state machine to handle initialization, restart, normal and
error states.
– State machine patterns to show how to send Anybus
CompactCom messages.
– Implementation of callbacks required by the driver.
– Definition of ADIs, Application Data Instances, and default
process data mapping setup.
These files have to be adapted to the application by the
programmer. Additionally they may be modified for optimization
and/or additional features.
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 9
Introduction 7 (54)
2.2 Preparations
Before continuing, try to answer as many of the questions below as possible. This will make the
later decisions during implementation easier. It is also good to have access to the hardware
schematics of the target hardware during the implementation.
Step One
Consider the following questions:
• What operating mode, or modes, shall be used in the design?
• What communication interfaces shall be used to communicate with the CompactCom in the
design?
• What networks shall be used in the design?
• Are the networks available in the CompactCom 40 series or is there also a need to use
CompactCom 30 series modules?
• Are the Module Identification pins connected to the host processor?
• Are the Module Detection pins connected to the host processor?
Step Two
Consider the following questions:
• Is the interrupt signal implemented in the hardware?
• What parameters/data shall be communicated on the network in the final product?
– Name
– Data type
– Number of elements
– Read/Write access
– Acyclic access, Cyclic access
– Max/Min/Default values
• Which events (diagnostics) shall be reported on the network?
• What network identification parameters are available? E.g. Vendor ID, Product Code, Id
number etc.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 10

Step One
3 Step One
3.1 System Adaptation and Application Development
When this step is completed you have...
• ...implemented the system specific functions needed to communicate with the Anybus
CompactCom.
• ...compiled the host application example code with default settings.
• ...exchanged data between the host application and the network master/scanner.
3.2 System Set-up
These defines can be found in abcc_adapt/abcc_td.h.
General settings for the system environment, to be used in the driver, are configured here.
3.2.1 Big- or Little Endian
Configure if the host application is a big endian system or a little endian system. Define ABCC_
SYS_BIG_ENDIAN if it is a big endian system. Do not define (leave as default) if the host
application is a little endian system.
8 (54)
#define ABCC_SYS_BIG_ENDIAN /* Big endian host application */
/* #define ABCC_SYS_BIG_ENDIAN */ /* Little endian host application */
3.2.2 16–bit Char System
Configure if the host application is a 16-bit char system or an 8-bit char system (i.e. if the
smallest addressable type is 8-bit or 16-bit). Define ABCC_SYS_16BIT_CHAR if it is a 16-bit
char system. Do not define (leave as default) if it is an 8-bit char system. Configuring of 16-bit
char for an 8-bit char system is not recommended.
#define ABCC_SYS_16_BIT_CHAR /* 16 bit char system */
/* #define ABCC_SYS_16_BIT_CHAR */ /* 8 bit char system */
3.2.3 Extended Bus Endian Difference
If the endianness for the external parallel data bus differs from the internal data bus endianness,
enable this define. If parallel 16-bit operating mode is not used, this define is ignored.
#define ABCC_CFG_PAR_EXT_BUS_ENDIAN_DIFF (FALSE)
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 11

Step One
3.2.4 Data Types
Define the Data Types for the current system. For 16-bit char systems, all 8-bit types shall be
typed to 16-bit types. The following data types must be defined:
9 (54)
BOOL
BOOL8
INT8
INT16
INT32
UINT8
UINT16
UINT32
FLOAT32
Standard boolean data type.
Standard boolean data type, 8-bit.
Standard signed 8-bit data type.
Standard singed 16-bit data type.
Standard signed 32-bit data type.
Standard unsigned 8-bit data type.
Standard unsigned 16-bit data type.
Standard unsigned 32-bit data type.
Float (according to IEC 60559).
3.3 Anybus CompactCom Set-up
These defines and functions are found in abcc_adapt/abcc_drv_cfg.h. Detailed
descriptions are available in abcc_drv/inc/abcc_cfg.h.
Settings for how to use and communicate with the Anybus CompactCom. Operating mode,
interrupt handling, memory handling etc., are configured here.
3.3.1 Communication Interfaces and Operating Modes
Define the communication interfaces and the operating mode between the host application and
the CompactCom (Parallel, SPI, Serial), that will be used in the implementation. There are several
possibilities to set the operating mode depending on how the host application is intended to
communicate with the Anybus and also depending on how the operating mode is selected by the
user.
• First, define all communication interfaces that will be supported by the implementation. All
interfaces that will be used must be defined here, otherwise an error will be reported later
on. Only define the interfaces that will really be used, since every enabled interface will
increase the compiled code size.
Only for 40-series.
#define ABCC_CFG_DRV_PARALLEL ( TRUE ) /* Parallel, 8/16-bit, event
mode */
#define ABCC_CFG_DRV_SPI ( FALSE ) /* SPI */
For both 30-series and 40-series.
#define ABCC_CFG_DRV_SERIAL ( FALSE ) /* Serial */
#define ABCC_CFG_DRV_PARALLEL_30( TRUE ) /* Parallel, 8-bit, half
duplex */
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 12

Step One
10 (54)
ABCC_CFG_DRV_SERIAL and ABCC_CFG_DRV_PARALLEL_30 use the CompactCom half duplex
communication protocol, with limited data sizes for process data and message data.
• Get the operating mode from external hardware - If the operating mode is set e.g. via a dipswitch connected to the host application processor or via an HMI controller, define the
ABCC_CFG_OP_MODE_GETTABLE and implement the function ABCC_SYS_GetOpmode
() in abcc_adapt/abcc_sys_adapt.c.
#define ABCC_CFG_OP_MODE_GETTABLE ( TRUE )
If not defined, the operating mode defines must be explicitly defined for the specific module
type. (See ABCC_CFG_ABCC_OP_MODE_30 and ABCC_CFG_ABCC_OP_MODE_40
below).
• If the operating mode pins on the CompactCom host connector can be controlled by the
host processor, define ABCC_CFG_OP_MODE_SETTABLE and implement the function
ABCC_SYS_SetOpmode() in abcc_adapt/abcc_sys_adapt.c.
#define ABCC_CFG_OP_MODE_SETTABLE ( TRUE )
If not defined, it is assumed that the operating mode signals of the CompactCom host
connector are fixed or controlled by external hardware, e.g. a dip-switch.
• If only one operating mode per module type (CompactCom 30 and CompactCom 40) is
used, define the operating mode with ABCC_CFG_ABCC_OP_MODE_30 and ABCC_CFG_
ABCC_OP_MODE_40. The available operating modes (ABP_OP_MODE_X) can be found in
abcc_abp/abp.h.
#define ABCC_CFG_ABCC_OP_MODE_30 ABP_OP_MODE_8_BIT_PARALLEL
#define ABCC_CFG_ABCC_OP_MODE_40 ABP_OP_MODE_16_BIT_PARALLEL
If none of these defines are set, ABCC_SYS_GetOpmode() must be implemented to
retrieve the operating mode from external hardware. See
ABCC_CFG_OP_MODE_GETTABLE above.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 13
Step One
3.3.2 Parallel Operating Mode Specifics
If parallel operating mode (8-bit or 16-bit) is not used, this section can be ignored.
If direct access to the CompactCom memory is available (the host controller provides dedicated
signals to access external SRAM), define ABCC_CFG_MEMORY_MAPPED_ACCESS to TRUE and
define the base address with ABCC_CFG_PARALLEL_BASE_ADR (this address must be
defined to suit the host platform).
#define ABCC_CFG_MEMORY_MAPPED_ACCESS ( TRUE )
#define ABCC_CFG_PARALLEL_BASE_ADR ( 0x00000000 )
If direct access to the CompactCom memory is not available, several functions to read and write
data must be implemented in abcc_adapt/abcc_sys_adapt.c (described in abcc_drv/
inc/abcc_sys_adapt_par.h).
The recommendation is to have direct access to the CompactCom memory if possible for a simpler and
most often faster implementation.
3.3.3 SPI Operating Mode Specifics
11 (54)
Only for 40-series. If SPI operating mode is not used, this section can be ignored.
The length of an SPI message fragment in bytes per SPI transaction is defined with ABCC_CFG_
SPI_MSG_FRAG_LEN.
If the ABCC_CFG_SPI_MSG_FRAG_LEN value is less than the largest message to be
transmitted, the sending or receiving of a message may be fragmented and take several SPI
transactions to be completed. Each SPI transaction will have a message field of this length
regardless if a message is present or not. If messages are important the fragment length should
be set to the largest message to avoid fragmentation. If IO data are important the message
fragment length should be set to a smaller value to speed up the SPI transaction.
For high message performance a fragment length up to 1524 octets is supported. The message
header is 12 octets, so 16 or 32 octets will be enough to support small messages without
fragmentation.
#define ABCC_CFG_SPI_MSG_FRAG_LEN ( 16 )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 14
Step One
3.3.4 Module ID and Module Detect Settings
• If the Module Identification pins (MI) on the CompactCom host connector are not
connected to the host processor, ABCC_CFG_MODULE_ID_PINS_CONN must be defined
as FALSE, and ABCC_CFG_ABCC_MODULE_ID must be defined to the correct
CompactCom module ID that corresponds to the module ID of the used device. If defined, it
shall be set to the correct ABP_MODULE_ID_X definition from abcc_abp/abp.h.
If ABCC_CFG_MODULE_ID_PINS_CONN is defined as TRUE, the function ABCC_SYS_
ReadModuleId() in abcc_adapt/abcc_sys_adapt.c must be implemented.
The recommendation is to connect the Module ID pins on the application connector directly to GPIO-pins
on the host processor and implement the ABCC_SYS_ReadModuleId() function.
#define ABCC_CFG_ABCC_MODULE_ID ABP_MODULE_ID_ACTIVE_ABCC40
#define ABCC_CFG_MODULE_ID_PINS_CONN ( TRUE )
• If the Module Detect pins (MD) in the host application connector are connected to the host
processor, the ABCC_CFG_MOD_DETECT_PINS_CONN shall be set to TRUE and the
ABCC_SYS_ModuleDetect() function in abcc_adapt/abcc_sys_adapt.c must
be implemented.
#define ABCC_CFG_MOD_DETECT_PINS_CONN ( TRUE )
12 (54)
3.3.5 Message and Process Data Settings
Leave the following defines with the default values for now.
#define ABCC_CFG_MAX_NUM_APPL_CMDS
#define ABCC_CFG_MAX_NUM_ABCC_CMDS
#define ABCC_CFG_MAX_MSG_SIZE
#define ABCC_CFG_MAX_PROCESS_DATA_SIZE
#define ABCC_CFG_REMAP_SUPPORT_ENABLED
#define ABCC_CFG_CMD_SEQ_MAX_NUM_RETRIES
#define ABCC_CFG_MAX_NUM_CMD_SEQ
The different platforms can have different default values depending on the available resources.
( 2 )
( 2 )
( 255 )
( 512 )
( FALSE )
( 0 )
( 2 )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 15
Step One
3.3.6 Interrupt Handling
If the IRQ pin is connected the driver can be configured to check if an event has occurred even if
the interrupt is disabled. It can be used e.g. to detect the CompactCom power up event. Define
ABCC_CFG_POLL_ABCC_IRQ_PIN to enable this functionality, and implement the function
ABCC_SYS_IsAbccInterruptActive() in abcc_adapt/abcc_sys_adapt.c.
#define ABCC_CFG_POLL_ABCC_IRQ_PIN ( TRUE )
In this step, we will not use the interrupt functionality, which means that we will define ABCC_
CFG_INT_ENABLED as FALSE.
If the IRQ pin is not connected, this define must be set to false.
#define ABCC_CFG_INT_ENABLED ( FALSE )
3.3.7 Communication Watchdog Settings
The timeout for the CompactCom communication watchdog is configured with ABCC_CFG_WD_
TIMEOUT_MS. If a timeout occurs, the callback function ABCC_CbfWdTimeout() is called.
The watchdog functionality is only supported by the SPI-, serial- and
parallel30 (half duplex) operating modes.
13 (54)
#define ABCC_CFG_WD_TIMEOUT_MS ( 1000 )
3.3.8 ADI Settings
Leave the following defines with the default values for now.
#define ABCC_CFG_STRUCT_DATA_TYPE ( FALSE )
#define ABCC_CFG_ADI_GET_SET_CALLBACK ( FALSE )
#define ABCC_CFG_64BIT_ADI_SUPPORT ( FALSE )
3.3.9 Debug Event Print Settings
For development purposes, a number of debug functions are available for the developer. The
following defines affects debug printouts from the driver. If additional printouts are needed from
the application code, use the ported function ABCC_PORT_DebugPrint() in abcc_adapt/
abcc_sw_port.h.
• Enable or disable the error reporting callback function ABCC_CbfDriverError() with
ABCC_CFG_ERR_REPORTING_ENABLED. The function is described in abcc_drv/inc/
abcc.h.
#define ABCC_CFG_ERR_REPORTING_ENABLED ( TRUE )
• Enable or disable driver support for print out of debug events within the driver with ABCC_
CFG_DEBUG_EVENT_ENABLED. ABCC_PORT_DebugPrint() in abcc_adapt/
abcc_sw_port.h will be used to print debug information.
#define ABCC_CFG_DEBUG_EVENT_ENABLED ( TRUE )
• Enable or disable printout of debug information, such as file name and line number, when
ABCC_CbfDriverError() is called with ABCC_CFG_DEBUG_ERR_ENABLED.
#define ABCC_CFG_DEBUG_ERR_ENABLED ( FALSE )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 16
Step One
• Enable or disable printout of received and sent messages with ABCC_CFG_DEBUG_
MESSAGING. Related events such as buffer allocation and queuing information is also
printed.
#define ABCC_CFG_DEBUG_MESSAGING ( FALSE )
• Enable or disable printout of command sequencer actions with ABCC_CFG_DEBUG_CMD_
SEQ_ENABLED.
#define ABCC_CFG_DEBUG_CMD_SEQ_ENABLED ( FALSE )
3.3.10 Startup Time
If the CompactCom IRQ pin is connected, ABCC_CFG_STARTUP_TIME_MS will be used as a
timeout while waiting for the CompactCom to become ready for communication. An error
(APPL_MODULE_NOT_ANSWERING) will be reported if the start-up interrupt is not received
within this time. If the interrupt pin is not available ABCC_CFG_STARTUP_TIME_MS will serve
as time to wait before starting to communicate with the CompactCom. If not defined, the default
value is 1500 ms.
#define ABCC_CFG_STARTUP_TIME_MS ( 1500 )
If possible, the recommendation is to use the startup interrupt (option available for the SPI and parallel
communication interfaces).
14 (54)
3.3.11 Sync Settings
Only for 40-series.
Leave the following defines with the default values for now.
#define ABCC_CFG_SYNC_ENABLE ( FALSE )
#define ABCC_CFG_SYNC_MEASUREMENT_IP ( FALSE )
#define ABCC_CFG_SYNC_MEASUREMENT_OP ( FALSE )
3.4 System Adaptation Functions
A number of functions must be implemented for the driver to be able to access the Anybus
CompactCom. The functions shall be implemented in abcc_adapt/abcc_sys_adapt.c.
The functions are described per operating mode in the files specified below.
• General functions: abcc_drv/inc/abcc_sys_adapt.h
• SPI operating mode: abcc_drv/inc/abcc_sys_adapt_spi.h
• Parallel operating mode: abcc_drv/inc/abcc_sys_adapt_par.h
• Serial operating mode: abcc_drv/inc/abcc_sys_adapt_ser.h
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 17

Step One
3.4.1 General Functions
These functions can be found in abcc_drv/inc/abcc_sys_adapt.h.
ABCC_SYS_HwInit()
This function can be used to initiate the hardware required to communicate with the
CompactCom device (e.g. configuring the direction and initial values of used host processor port
pins). This function shall be called once during the power up initialization.
Note: Make sure that the CompactCom is kept in reset state when returning from this function.
ABCC_SYS_Init()
This function is called by the driver at start-up and restart of the driver. If needed, any hardware
or system dependent initialization shall be done here. If not used, leave the function empty.
ABCC_SYS_Close()
Called from the driver if the driver is terminated. If resources were allocated in ABCC_SYS_
Init() it is recommended to close or free them in this function. If not used, leave the function
empty.
ABCC_SYS_HWReset()
This function must be implemented to pull the reset pin on the Anybus CompactCom interface to
low.
15 (54)
ABCC_SYS_HWReleaseReset()
This function must be implemented to set the reset pin on the Anybus CompactCom interface to
high.
ABCC_SYS_AbccInterruptEnable()
For now, interrupt will be disabled. Leave this function empty for now.
ABCC_SYS_AbccInterruptDisable()
For now, interrupt will be disabled. Leave this function empty for now.
ABCC_SYS_IsAbccInterruptActive()
If the interrupt pin (IRQ) is connected to the host processor, this function shall read the interrupt
signal from the CompactCom and return TRUE if the interrupt pin is low (i.e. interrupt is active)
and return FALSE if the interrupt pin is high (i.e. the interrupt is inactive). It is used to enable
polling of the interrupt pin of the CompactCom interface if interrupts are not enabled.
ABCC_SYS_SyncInterruptEnable()
For now, synchronization will be disabled. Leave this function empty for now.
ABCC_SYS_SyncInterruptDisable()
For now, synchronization will be disabled. Leave this function empty for now.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 18

Step One
3.4.2 SPI Operating Mode
Only for 40-series. If SPI operating mode is not used, the functions below are never called, and
this section can be ignored.
These functions can be found in abcc_drv/inc/abcc_sys_adapt_spi.h.
ABCC_SYS_SpiRegDataReceived(ABCC_SYS_SpiDataReceivedCbfType pnDataReceived)
Registers the callback function that shall be called when new data is received (MISO frame
received).
Example:
static ABCC_SYS_SpiDataReceivedCbfType pnDataReadyCbf;
void ABCC_SYS_SpiRegDataReceived( ABCC_SYS_SpiDataReceivedCbfType
pnDataReceived )
{
pnDataReadyCbf = pnDataReceived;
}
ABCC_SYS_SpiSendReceive(void* pxSendDataBuffer, void* pxReceiveDataBuffer, UINT16
iLength)
Handles sending and receiving of data in SPI mode.
16 (54)
Two buffers are provided, one with a MOSI data frame to be sent and one buffer to store the
received MISO frame.
3.4.3 Parallel Operating Mode
These functions can be found in abcc_drv/inc/abcc_sys_adapt_par.h.
If parallel operating mode is not used, the functions below are never called, and this section
can be ignored.
If parallel operating mode is used and ABCC_CFG_MEMORY_MAPPED_ACCESS is defined, this
section can be ignored. See Parallel Operating Mode Specifics for more information about
ABCC_CFG_MEMORY_MAPPED_ACCESS.
ABCC_SYS_ParallelRead()
Reads an amount of octets from the CompactCom memory.
ABCC_SYS_ParallelRead8()
Only used for half duplex parallel operating mode.
Reads an octet from the CompactCom memory.
ABCC_SYS_ParallelRead16()
Reads a word from the CompactCom memory.
ABCC_SYS_ParallelWrite()
Writes an amount of octets to the CompactCom memory.
ABCC_SYS_ParallelWrite8()
Only used for half duplex parallel operating mode.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 19

Step One
Writes an octet to the CompactCom memory.
ABCC_SYS_ParallelWrite16()
Writes a word to the CompactCom memory.
ABCC_SYS_ParallelGetRdPdBuffer()
Get the address to the received read process data.
ABCC_SYS_ParallelGetWrPdBuffer()
Get the address to store the write process data.
3.4.4 SerialOperating Mode
These functions can be found in abcc_drv/inc/abcc_sys_adapt_ser.h.
If serial operating mode is not used, the functions below are never called, and this section can
be ignored.
ABCC_SYS_SerRegDataReceived(ABCC_SYS_SerDataReceivedCbfType pnDataReceived)
Registers a callback function that shall indicate that a new RX telegram has been received on the
serial channel.
17 (54)
Example:
static ABCC_SYS_SerDataReceivedCbfType pnSerDataReadyCbf;
void ABCC_SYS_SerRegDataReceived( ABCC_SYS_SerDataReceivedCbfType
pnDataReceived )
{
pnSerDataReadyCbf = pnDataReceived;
}
ABCC_SYS_SerSendReceive(void* pxTxDataBuffer, void* pxRxDataBuffer, UINT16 iTxSize,
UINT16 iRxSize)
Send TX telegram and prepare for RX telegram reception.
ABCC_SYS_SerRestart(void)
Restart the serial driver. Typically used when a telegram has timed out.
This command flushes all buffers, restarts communication, and starts waiting for a RX telegram
with the length of the latest provided RX telegram length.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 20

Step One
3.5 Object Configuration
For this step, the default settings in the CompactCom will be used. No host application objects
are enabled in the file abcc_adapt/abcc_obj_cfg.h.
In Step Two, the network identification attributes will be customized to fit the target product.
3.6 Example Application
An API layer that defines a common interface for all network applications to the Anybus
CompactCom driver is available. The API is found in abcc_drv/inc/abcc.h. The example
application is provided to give an example of how a standard application implements the
CompactCom driver using the API. It can be used as it is to be able to test the CompactCom
concept and can also be used as a base when implementing the driver into the final application.
3.6.1 ADI and Process Data Mapping
Process data is an integral part of the application. Process data is added to the application by
creating ADIs (Application Data Instances) and mapping them to the desired process data areas
(read or write).
For now, the mapping described in appl_adimap_speed_example.c shall be used. This
means that APPL_ACTIVE_ADI_SETUP in /example_app/appl_adi_config.h is
defined as APPL_ADI_SETUP_SPEED_EXAMPLE.
18 (54)
• example_app/appl_adimap_speed_example.c - Simulation of speed and
reference speed.
– ADI 1: "Speed", UINT16, Mapped to Read process data
– ADI 2: "Ref Speed", UINT16, Mapped to Write process data
– Data is manipulated with the function APPL_CyclicalProcessing()
– No structures or callbacks are used.
3.6.2 Main Loop
The main loop is where the execution of the application starts. In the generic project, it is located
in the file named main.c. Below are some guidelines how to implement the main loop.
• ABCC_HwInit() - this function will initiate the hardware required to communicate with
the CompactCom, and shall be called once during the power-up initialization. It must also
make sure that the CompactCom is kept in reset when returning from the function. The
driver can be restarted without calling this function again. ABCC_HwInit() will trigger
the function ABCC_SYS_HwInit() in abcc_adapt/abcc_sys_adapt.c, which
shall be customized to fit the current system. Make sure this function is one of the first
functions called in the main function.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 21

Step One
19 (54)
• APPL_HandleAbcc() - This function will run the CompactCom state machine and take
care of reset, run, and shutdown of the driver, and it must be called periodically from the
main loop. A status from the CompactCom driver is returned every time this function is
called.
APPL_MODULE_NO_ERROR
APPL_MODULE_NOT_DETECTED
APPL_MODULE_NOT_SUPPORTED
APPL_MODULE_NOT_ANSWERING
APPL_MODULE_RESET
APPL_MODULE_SHUTDOWN
APPL_MODULE_UNEXPECTED_ERROR
The CompactCom is OK. This is the normal response if everything is
running normal.
No CompactCom is detected. Inform the user.
Unsupported module detected. Inform the user.
Possible reasons: Wrong communication interface selected, defect
module.
Reset requested from the CompactCom. A reset is received from the
network. The application is responsible for restarting the
CompactCom.
Shutdown requested.
Unexpected error occurred. Inform the user. If necessary, put the
outputs in a fail-safe state.
• ABCC_RunTimerSystem() - This function shall be called periodically with a known
period (ms since last call). This can be done either by having a known delay in the main loop
and call the function each iteration, or by setting up a timer interrupt.
This function is responsible for handling all timers for the CompactCom driver. It is
recommended to call this function on a regular basis from a timer interrupt. Without this
function no timeout and watchdog functionality will work.
It is recommended to use a timer interrupt with this function. However, for easier debugging when
implementing, skip the timer interrupt in the beginning.
int main()
{
APPL_AbccHandlerStatusType eAbccHandlerStatus = APPL_MODULE_NO_ERROR;
if (ABCC_HwInit() != ABCC_EC_NO_ERROR )
{
return ( 0 );
}
while ( eAbccHandlerStatus == APPL_MODULE_NO_ERROR )
{
eAbccHandlerStatus = APPL_HandleAbcc();
#if( !USE_TIMER_INTERRUPT )
ABCC_RunTimerSystem( APPL_TIMER_MS );
DelayMs( APPL_TIMER_MS );
#endif
switch( eAbccHandlerStatus )
{
case APPL_MODULE_RESET:
Reset();
break;
default:
break;
}
}
return ( 0 );
}
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 22

Step One
3.6.3 Compile and Run
To compile the project, update the make-file to include all the Anybus CompactCom 40 example
code (all of the five folders described here) and compile.
• /abcc_abp
• /abcc_drv
• /abcc_adapt
• /abcc_obj
• /example_app
Before continuing to Step Two, make sure...
• ...the project compiles without errors.
• ...the host application can communicate with the Anybus CompactCom.
• ...data can be exchanged with the network.
20 (54)
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 23

Step Two
4 Step Two
4.1 Adaptations and Customizations
When this step is completed you have...
• …customized the network identification, e.g. Vendor ID, Product Code, Product Name, etc.
• …created ADI:s for the target product.
• …mapped the ADI:s that shall be exchanged cyclically to process data.
4.1.1 Anybus CompactCom Setup
In Step One, some Anybus CompactCom settings were left at default values. We will revisit some
of those values here.
Message and Process Data Settings
• The number of message commands that can be sent without receiving a response is
configured with ABCC_CFG_MAX_NUM_APPL_CMDS. Increasing this value will of course
increase the possible number of message commands, but it will also consume more RAM
memory.
21 (54)
#define ABCC_CFG_MAX_NUM_APPL_CMDS ( 2 )
• The number of message commands that can be received without sending a response is
configured with ABCC_CFG_MAX_NUM_ABCC_CMDS. Increasing this value will of course
increase the possible number of message commands, but it will also consume more RAM
memory.
#define ABCC_CFG_MAX_NUM_ABCC_CMDS ( 2 )
• The size of the largest message in bytes that will be used is configured with ABCC_CFG_
MAX_MSG_SIZE.
Anybus CompactCom 30 supports 255 bytes messages and Anybus CompactCom 40 supports 1524 bytes
messages. ABCC_CFG_MAX_MSG_SIZE should be set to largest size that will be sent or received. If
this size is not known it recommended to set the maximum supported size.
#define ABCC_CFG_MAX_MSG_SIZE ( 255 )
• The maximum size of the process data in bytes that will be used in either direction is
configured with ABCC_CFG_MAX_PROCESS_DATA_SIZE. The maximum size is
dependent on the type of network that is used. See the corresponding network guide for
the networks to be used.
#define ABCC_CFG_MAX_PROCESS_DATA_SIZE ( 512 )
• Enable or disable driver and Application Data object support for the remap command with
ABCC_CFG_REMAP_SUPPORT_ENABLED. If TRUE the ABCC_CbfRemapDone() needs
to be implemented by the application. The function is described in abcc_drv/inc/
abcc.h.
#define ABCC_CFG_REMAP_SUPPORT_ENABLED ( FALSE )
• The maximum number of allowed simultaneous message command sequences when using
the message command sequencer.
#define ABCC_CFG_MAX_NUM_CMD_SEQ ( 2 )
• Configure the number of retries the message command sequencer shall do if there is no
buffer available, before an error is reported.
#define ABCC_CFG_CMD_SEQ_MAX_NUM_RETRIES ( 0 )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 24

Step Two
22 (54)
Interrupt Handling
The Anybus CompactCom driver can be used either with the interrupt functionality enabled or
disabled.
• Define if the CompactCom IRQ pin shall be used along with an interrupt routine by defining
ABCC_CFG_INT_ENABLED. The IRQ pin can be used in both parallel mode and SPI mode.
The function ABCC_ISR() shall be called from inside the CompactCom interrupt routine. If
the interrupt is flank triggered, the interrupt shall be acknowledged before ABCC_ISR() is
called.
#define ABCC_CFG_INT_ENABLED ( FALSE )
• If parallel mode is not used, this define can be ignored. Configure which interrupts that
shall be enabled when using parallel mode with the ABCC_CFG_INT_ENABLE_MASK_
PAR define. The available options are defined in abcc_abp/abp.h (INT MASK Register).
If an event is not notified via the CompactCom interrupt, it must be polled by the driver
function ABCC_RunDriver() (called by example_app/APPL_HandleAbcc()). If
not defined, the default mask is 0.
#define ABCC_CFG_INT_ENABLE_MASK_PAR ( ABP_INTMASK_RDPDIEN | ABP_
INTMASK_STATUSIEN | ABP_INTMASK_RDMSGIEN | ABP_INTMASK_WRMSGIEN |
ABP_INTMASK_ANBRIEN )
• ABCC_CFG_HANDLE_INT_IN_ISR_MASK defines what interrupt events for the Anybus
CompactCom that are handled in interrupt context. Events that are enabled in the interrupt
enable mask (ABCC_CFG_INT_ENABLE_MASK_X) but not configured to be handled by
the ISR will be translated to a bit field of ABCC_ISR_EVENT_X definitions (defined in
abcc_drv/inc/abcc.h) and forwarded to the user via the ABCC_CbfEvent()
callback. Only applicable for parallel 8/16-bit operating mode.
If not defined, the value will be 0, i.e. no events are handled by the ISR.
#define ABCC_CFG_HANDLE_INT_IN_ISR_MASK ( ABP_INTMASK_RDPDIEN )
ADI Settings
• Enable ADI-support for structured data types with ABCC_CFG_STRUCT_DATA_TYPE. This
define will affect the AD_AdiEntryType in abcc_drv/inc/abcc_ad_if.h, used for
defining the user ADI:s. If defined, the required memory usage will increase, i.e. it should
only be defined if structured data types are needed.
#define ABCC_CFG_STRUCT_DATA_TYPE ( FALSE )
• Enable or disable driver support for triggering of callback notifications each time an ADI is
read or written with ABCC_CFG_ADI_GET_SET_CALLBACK. This define will affect the
AD_AdiEntryType in abcc_drv/inc/abcc_ad_if.h, used for defining the user
ADI:s. If an ADI is read by the network the callback is invoked before the action. If an ADI is
written by the network the callback is invoked after the action.
#define ABCC_CFG_ADI_GET_SET_CALLBACK ( FALSE )
• Enable or disable support for 64-bit data types in the Application Data object with ABCC_
CFG_64BIT_ADI_SUPPORT.
#define ABCC_CFG_64BIT_ADI_SUPPORT ( FALSE )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 25

Step Two
23 (54)
Sync Settings
Only for 40–series.
• Enable or disable driver support for sync. If TRUE, the abcc_CbfSyncIsr() must be
implemented by the application.
#define ABCC_CFG_SYNC_ENABLE ( TRUE )
• ABCC_SYS_SyncInterruptEnable()
Enables the sync interrupt triggered by the sync-pin on the application interface (MIO/SYNC).
This function will be called by the driver to enable the sync interrupt.
Only used when synchronization functionality is enabled.
• ABCC_SYS_SyncInterruptDisable()
Disables the sync interrupt triggered by the sync-pin on the application interface (MIO/
SYNC). This function will be called by the driver to disable the sync interrupt.
Only used when synchronization functionality is enabled.
If sync is not used or if the code is compiled for release, the following defines shall be disabled.
The sync measurement functions are used to measuring the input processing time and the
output processing time used in a sync application.
• Enable or disable driver support for measurement of input processing time (used for sync)
with ABCC_CFG_SYNC_MEASUREMENT_IP. This define is used during development by
activating it and compiling special test versions of the product. When ABCC_CFG_SYNC_
MEASUREMENT_IP is TRUE ABCC_SYS_GpioReset() is called when the WRPD has
been sent. If running in SPI operating mode it is instead called when ABCC_
SpiRunDriver() has finished sending data to the Anybus. When ABCC_CFG_SYNC_
MEASUREMENT_IP is TRUE, ABCC_GpioSet() needs to be called at the Input Capture
Point.
#define ABCC_CFG_SYNC_MEASUREMENT_IP ( FALSE )
• Enable or disable driver support for measurement of output processing time (used for sync)
with ABCC_CFG_SYNC_MEASUREMENT_OP. This define is used during development by
activating it and compiling special test versions of the product. When ABCC_CFG_SYNC_
MEASUREMENT_OP is TRUE, ABCC_SYS_GpioSet() is called from the RDPDI interrupt.
When ABCC_CFG_SYNC_MEASUREMENT_OP is TRUE ABCC_GpioReset() needs to
be called at the Output Valid Point.
#define ABCC_CFG_SYNC_MEASUREMENT_OP ( FALSE )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 26

Step Two
4.1.2 System Adaptation Functions
These functions can be found in abcc_adapt/abcc_sys_adapt.c.
If interrupts will be used in Step Two, implement the following functions.
• ABCC_SYS_AbccInterruptEnable()
Enable the CompactCom HW interrupt (IRQ_N pin on the application interface). This
function will be called by the driver when the CompactCom interrupt shall be enabled.
If ABCC_CFG_INT_ENABLED is not defined in abcc_adapt/abcc_drv_cfg.h, this
function does not need to be implemented.
• ABCC_SYS_AbccInterruptDisable()
Disable CompactCom HW interrupt (IRQ_N pin on the application interface).
If ABCC_CFG_INT_ENABLED is not defined in abcc_adapt/abcc_drv_cfg.h, this
function does not need to be implemented.
24 (54)
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 27

Step Two
4.1.3 Network Identification
So far, all network settings have been left disabled and the product has identified itself as an
HMS product, using default values. Now it is time to customize the network identification
settings.
Host Application Objects — Networks
Define the networks to be supported by the implementation by defining their respective host
application object in the file abcc_adapt/abcc_obj_cfg.h. Further implementations of
the host application objects are done in the abcc_obj folder where each object has its own cand h-files.
Example:
#define PRT_OBJ_ENABLE ( TRUE )
#define EIP_OBJ_ENABLE ( FALSE )
#define EPL_OBJ_ENABLE ( TRUE )
The identity related attributes for each enabled network object are parameters that must be set
by the application. They are all related to how the device is identified on the network. If the
attribute is enabled (TRUE), the value will be used. If the attribute is disabled (FALSE), the
attribute's default value will be used. These settings can be found in abcc_adapt/abcc_
identification.h.
25 (54)
Example:
/*---------------------------------------------------------------------------** Ethernet Powerlink (0xE9)
**---------------------------------------------------------------------------*/
#if EPL_OBJ_ENABLE
/*
** Attribute 1: Vendor ID (UINT32 - 0x00000000-0xFFFFFFFF)
*/
#ifndef EPL_IA_VENDOR_ID_ENABLE
#define EPL_IA_VENDOR_ID_ENABLE TRUE
#define EPL_IA_VENDOR_ID_VALUE 0xFFFFFFFF
#endif
/*
** Attribute 2: Product Code type (UINT32 - 0x00000000-0xFFFFFFFF)
*/
#ifndef EPL_IA_PRODUCT_CODE_ENABLE
#define EPL_IA_PRODUCT_CODE_ENABLE TRUE
#define EPL_IA_PRODUCT_CODE_VALUE 0xFFFFFFFF
#endif
It is also possible to define a function instead of a constant to generate the value. The serial number is a
good example of where a function would be suitable. In the example below, the serial number is set
during production in a specific memory area, and here the same number is fetched:
extern char* GetSerialNumberFromProductionArea(void);
#define PRT_IA_IM_SERIAL_NBR_ENABLE TRUE
#define PRT_IA_IM_SERIAL_NBR_VALUE GetSerialNumberFromProductionArea()
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 28

Step Two
26 (54)
Host Application Objects — Other
In abcc_adapt/abcc_obj_cfg.h, define all other host application objects that shall be
supported by the implementation. If not supported, leave the value as FALSE.
Example:
#define ETN_OBJ_ENABLE ( TRUE )
#define SYNC_OBJ_ENABLE ( FALSE )
Host Application Objects — Advanced
The file abcc_adapt/abcc_obj_cfg.h contains all attributes for all supported host
objects, except for those already defined in abcc_adapt/abcc_identification.h. All
attributes in this file are disabled by default. Network specific services are labelled "not
supported" by default, and if desired they need to be implemented in the application.
The file abcc_adapt/abcc_platform_cfg.h can be used to override defines for objects and
attributes in the files abcc_adapt/abcc_obj_cfg.h, abcc_adapt/abcc_identification.
h and abcc_adapt/abcc_drv_cfg.h.
To override a define, just add the desired defines to the abcc_adapt/abcc_platform_cfg.h file
or use the global defines section in the development environment.
If not used, leave the file empty.
4.1.4 Software Platform Porting
These functions can be found in abcc_adapt/abcc_sw_port.h.
The driver uses a number of functions, like memory copying functions, print functions, and
functions for critical sections, which can be optimized for the current software platform. These
functions can be found in the file abcc_adapt/abcc_sw_port.h (described in abcc_
drv/inc/abcc_port.h). The default example code can be used as-is, but it should be
optimized (recommended) for the desired platform later in the implementation project.
ABCC_PORT_DebugPrint()
Used by the driver for debug prints such as events or error debug information. If not defined the
driver will be silent. Debug prints can e.g. be sent to a serial terminal or be saved to a logfile.
Critical Section Functions
Critical sections are used when there is a risk of resource conflicts or race conditions between
CompactCom interrupt handler context and the application thread.
The following macros are used to implement the critical sections:
• ABCC_PORT_UseCritical()
• ABCC_PORT_EnterCritical()
• ABCC_PORT_ExitCritical()
• ABCC_PORT_TIMER_UseCritical()
• ABCC_PORT_TIMER_EnterCritical()
• ABCC_PORT_TIMER_ExitCritical()
Depending on the configuration of the driver there are different requirements on the critical
section implementation. Please choose the most suitable implementation from the numbered
list below. The first statement that is true will choose the requirement.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 29

Step Two
27 (54)
1. The first three macros above need to be implemented if any of the statements below are
true.
– Any message handling is done within interrupt context.
Requirements:
– The implementation must support that a critical section is entered from interrupt
context. ABCC_PORT_UseCritical() should be used for any declarations needed
in advance by ABCC_PORT_EnterCritical().
– When entering the critical section the required interrupts i.e. any interrupt that may
lead to driver access, must be disabled. When leaving the critical section the interrupt
configuration must be restored to the previous state.
2. ABCC_PORT_EnterCritical() and ABCC_PORT_ExitCritical() need to be
implemented if any of the statements below are true.
– The application is accessing the CompactCom driver message interface from different
processes or threads without protecting the message interface on a higher level
(semaphores or similar).
Requirement:
– When entering the critical section the required interrupts i.e. any interrupt that may
lead to driver access, must be disabled. When leaving the critical section the interrupts
must be enabled again.
3. If none of the above is true, no implementation is required.
If the application is calling ABCC_RunTimerSystem() from a timer interrupt, the last three timerspecific macros also need to be defined. If left undefined by the application in abcc_sw_port.h,
these will assume the same definition as the corresponding three macros specified above:
Requirements:
• ABCC_PORT_TIMER_UseCritical() should be used for any declarations needed in advance by
ABCC_PORT_TIMER_EnterCritical().
• When entering the critical section, the required interrupts i.e. any interrupt that may lead
to driver access, specifically the timer system, must be disabled. When leaving the critical
section the interrupt configuration must be restored to the previous state.
ABCC_PORT_UseCritical()
If any preparation is needed before calling ABCC_PORT_EnterCritical() or ABCC_
PORT_ExitCritical(), this macro is used to add platform specific necessities.
ABCC_PORT_EnterCritical()
This function is called by the driver when there is a possibility of internal resource conflicts
between the CompactCom interrupt handler and the application thread or main loop. The
function temporarily disables interrupts to avoid conflict. Note that all interrupts that could lead
to a driver access need to be disabled.
ABCC_PORT_ExitCritical()
Restore interrupts to the state they were before ABCC_PORT_EnterCritical() was called.
ABCC_PORT_TIMER_UseCritical()
If any preparation is needed before calling ABCC_PORT_TIMER_EnterCritical() or
ABCC_PORT_TIMER_ExitCritical(), this macro is used to add platform specific
necessities.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 30

Step Two
28 (54)
ABCC_PORT_TIMER_EnterCritical()
Disables timer based interrupts, if they are not already disabled.
ABCC_PORT_TIMER_ExitCritical()
Restore interrupts to the state they were before ABCC_PORT_TIMER_EnterCritical()
was called.
ABCC_PORT_MemCopy()
Copy a number of octets, from the source pointer to the destination pointer.
ABCC_PORT_StrCpyToNative()
Copy a packed string to a native formatted string.
ABCC_PORT_StrCpyToPacked()
Copy a native formatted string to a packed string.
ABCC_PORT_CopyOctets()
Copy octet aligned buffer.
ABCC_PORT_Copy8()
Copy 8 bits from a source to a destination. For a 16 bit char platform octet alignment support
(the octet offset is odd) need to be considered when porting this macro.
ABCC_PORT_Copy16()
Copy 16 bits from a source to a destination. Octet alignment support (the octet offset is odd)
need to be considered when porting this macro.
ABCC_PORT_Copy32()
Copy 32 bits from a source to a destination. Octet alignment support (the octet offset is odd)
need to be considered when porting this macro.
ABCC_PORT_Copy64()
Copy 64 bits from a source to a destination. Octet alignment support (the octet offset is odd)
need to be considered when porting this macro.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 31

Step Two
4.1.5 Example Application
ADI:s and Process Data Mapping
In Step One, the example ADI mapping appl_adimap_speed_example.h was used. In the
example application there are ADI mapping examples included, which exemplify different types
of ADI:s.
Only one mapping can be used at a time. The map that is currently used in the application is
configured in the file example_app/appl_adi_config.h, by defining APPL_ACTIVE_
ADI_SETUP to the ADI mapping to be used. For detailed information about how to set up the
ADIs, see abcc_drv/abcc_ad_if.h.
• example_app/appl_adimap_speed_example.h – Simulation of speed and
reference speed.
29 (54)
ADI
ADI 1
ADI 2
Description
"Speed", UINT16 (mapped to input data)
"Ref Speed", UINT16 (mapped to output data)
– Data manipulated with the function APPL_CyclicalProcessing().
– No structures or callbacks are used.
• example_app/appl_adimap_simple16.c – This map loops 32 16-bit words.
ADI
ADI 1
ADI 2
Description
32 element array of UINT16 (mapped to input data)
32 element array of UINT16 (mapped to output data)
– The ADIs are mapped to process data in each direction..
– The data is looped since both ADIs refer to the same data place holder.
– No structures or callbacks are used.
• example_app/appl_adimap_separate16.c - Example of how get/set callbacks can
be used.
ADI
ADI 10
ADI 11
ADI 12
Description
32 element array of UINT16 (mapped to output data)
32 element array of UINT16 (mapped to input data)
UINT16 (not mapped to process data)
– ADIs 10 and 11 are mapped on process data in each direction.
– A callback is used when the network reads ADI 11. This callback will increment the
value of ADI 12 by one.
– A callback is used when the network writes ADI 10. This callback copies the value of
ADI 10 to ADI 11.
ABCC_CFG_ADI_GET_SET_CALLBACK has to be enabled in abcc_adapt/abcc_drv_cfg.h
since callbacks are used. See ADI Settings for more information.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 32

Step Two
30 (54)
• example_app/appl_adimap_alltypes.c - Example of how structured data types
and bit data types can be used
ADI
ADI 20
ADI 21
ADI 22
ADI 23
ADI 24
ADI 25
ADI 26
ADI 27
ADI 28
ADI 29
ADI 30
ADI 31
ADI 32
ADI 33
ADI 34
ADI 35
ADI 36
ADI 37
ADI 38
ADI 39
Description
UINT32 (mapped to output data)
UINT32 (mapped to input data)
SINT32 (mapped to output data)
SINT32 (mapped to input data)
UINT16 (mapped to output data)
UINT16 (mapped to input data)
SINT16 (mapped to output data)
SINT16 (mapped to input data)
BITS16 (mapped to output data)
BITS16 (mapped to input data)
UINT8 (mapped to output data)
UINT8 (mapped to input data)
SINT8 (mapped to output data)
SINT8 (mapped to input data)
PAD8 (mapped to output data, reserved space, no data)
PAD8 (mapped to input data, reserved space, no data)
BIT7 (mapped to output data)
BIT7 (mapped to input data)
Struct (mapped to output data)
Struct (mapped to input data)
ABCC_CFG_STRUCT_DATA_TYPE has to be enabled in abcc_adapt/abcc_drv_cfg.h since
structures are used. See ADI Settings for more information.
No specific functionality is implemented to manipulate with the data in this example.
• example_app/appl_adimap_asm.c
Example of an ADI setup with assembly mapping instances.
• example_app/appl_adimap_sync.c
Simple example of how to handle ADI values in a sync application.
• example_app/appl_adimap_verif.c
Used for internal tests at HMS Industrial Networks.
• example_app/adimap_bacnet.c
BACnet specific ADI example.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 33

Step Two
31 (54)
The examples implement the following steps that shall be customized to fit the actual
implementation:
• ADI Entry List - The ADI:s (i.e. the data instances that will be used in the implementation)
must be defined as an AD_AdiEntryType in an ADI entry list. All parameters related to
an ADI are specified here.
ADI Entry Item
iInstance
pabName Name of ADI (character string, ADI instance attribute #1). If NULL, a zero length name will be
bDataType
bNumOfElements For arrays: number of elements of the data type specified in bDataType.
bDesc Entry descriptor. Bit values according to the following configurations:
Description
ADI instance number (1-65535). 0 is reserved for Class.
returned.
ABP_BOOL:
ABP_SINT8:
ABP_SINT16:
ABP_SINT32:
ABP_UINT8:
ABP_UNIT16:
ABP_UINT32:
ABP_CHAR:
ABP_ENUM:
ABP_SINT64:
ABP_UINT64:
ABP_FLOAT:
ABP_OCTET
ABP_BITS8
ABP_BITS16
ABP_BITS32
ABP_BIT1
ABP_BIT2
:
ABP_BIT7
ABP_PAD0
ABP_PAD1
:
ABP_PAD16
DONT_CARE
For structured data types: number of elements in the structure.
ABP_APPD_DESCR_GET_ACCESS: Get service is allowed on value attribute.
ABP_APPD_DESCR_SET_ACCESS: Set service is allowed on value attribute.
ABP_APPD_DESCR_MAPPABLE_WRITE_PD: ADI is mappable on write process data.
ABP_APPD_DESCR_MAPPABLE_READ_PD: ADI is mappable on read process data.
Boolean
Signed 8 bit integer
Signed 16 bit integer
Signed 32 bit integer
Unsigned 8 bit integer
Unsigned 16 bit integer
Unsigned 32 bit integer
Character
Enumeration
Signed 64 bit integer
Unsigned 64 bit integer
Floating point value (32 bits)
Undefined 8 bit data (Only 40-series)
8 bit bit field (Only 40-series)
16 bit bit field (Only 40-series)
32 bit bit field (Only 40-series)
1 bit bit field (Only 40-series)
2 bit bit field (Only 40-series)
:
7 bit bit field (Only 40-series)
0 pad bit field (Only 40-series)
1 pad bit field (Only 40-series)
:
16 pad bit field (Only 40-series)
Use for structured data types
pxValuePtr Pointer to local value variable. The type is dependent on bDataType.
pxValuePropPtr
psStruct
pnGetAdiValue Pointer to an ABCC_GetAdiValueFuncType called when getting an ADI value. (Optional)
pnSetAdivalue Pointer to an ABCC_SetAdiValueFuncType called when setting an ADI value. (Optional)
®
Anybus
CompactCom™Host Application Implementation Guide
The descriptors can be logically OR:ed together.
In the example, ALL_ACCESS is all of the above logically OR:ed together.
Note: Ignored for structured data types
Note: Ignored for structured data types
Pointer to local value properties struct, if NULL, no properties are applied (max/min/default).
The type is dependent on bDataType. The use of max/min/default for acyclic messaging
must be enabled in the Application Data Object (AD_IA_MIN_MAX_DEFAULT_ENABLE) in
abcc_adapt/abcc_obj_cfg.h.
Note: Ignored for structured data types
Pointer to an AD_StructDataType. Set to NULL for non structured data types. This field is
enabled by defining ABCC_CFG_STRUCT_DATA_TYPE. (Optional, Only 40-series)
HMSI-27-334 1.7 en-US
Page 34

Step Two
The different ADI entries in the example code are defined as "const", i.e. the information will be saved in
ROM. However, sometimes it is not known at compile time what the ADI list shall look like. In that case,
the const declaration must be removed, and the ADI entry structure must be filled out before calling
ABCC_RunDriver(). The information will then be saved in RAM.
For use of structured data types in an ADI, see the example in abcc_drv/inc/abcc_ad_if.h.
• Write and Read Process Data Mapping - ADI:s that shall be mapped as process data are
mapped with AD_MapType. There is one combined list for both read process data and
write process data.
Data Mapping Item Description
iInstance
eDir
bNumElem Number of elements to map. Can only be > 1 for arrays or structures.
bElemStartIndex Element start index within an array or structure. If the ADI is not an array or structure,
ADI number of the ADI to map (see ADI Entry List above)
Direction of map. Set to PD_END_MAP to indicate end of default map list.
AD_DEFAULT_MAP_ALL_ELEM indicates that all elements shall be mapped.
If instance == AD_MAP_PAD_ADI, bNumElem indicates number of bits to pad with.
enter 0
The mappings are done in the order they will show up on the network.
32 (54)
Note: The mapping sequence is terminated by AD_MAP_END_ENTRY, which MUST be
present at the end of the list. During the setup sequence, the Anybus CompactCom driver
will ask for this information by invoking ABCC_CbfAdiMappingReq().
Example:
/* ADI instance no, direction, number of elements in ADI to be mapped,
index of starting element in ADI to be mapped */
AD_MapType APPL_asAdObjDefaultMap[]
{
{ 3, PD_WRITE, AD_MAP_ALL_ELEM , 0 },
{ 5, PD_WRITE, AD_MAP_ALL_ELEM , 0 },
{ 6, PD_WRITE, AD_MAP_ALL_ELEM , 0 },
{ 1, PD_READ, AD_MAP_ALL_ELEM , 0 },
{ 2, PD_READ, AD_MAP_ALL_ELEM , 0 },
{ 500, PD_WRITE, AD_MAP_ALL_ELEM , 0 },
{ 501, PD_WRITE, AD_MAP_ALL_ELEM , 0 },
{ 502, PD_WRITE, AD_MAP_ALL_ELEM , 0 },
{ 4, PD_READ, AD_MAP_ALL_ELEM , 0 },
{ 503, PD_READ, AD_MAP_ALL_ELEM , 0 },
{ AD_MAP_END_ENTRY}
};
See example of usage in abcc_drv/inc/abcc_ad_if.h.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 35

Step Two
33 (54)
Process Data Callbacks
There are two callback functions related to the update of the process data that must be
implemented to inform the host that the read process data has been received from the network
or that it is time to update the write process data. An example is available in example_app/
appl_abcc_handler.c.
• BOOL ABCC_CbfUpdateWriteProcessData( void* pxWritePd) - Updates the
current write process data. The data must be copied into the buffer (pxWritePd) before
returning from the function.
• void ABCC_CbfNewReadPd( void* pxReadPd) - Called when new process data has
been received from the network. The process data needs to be copied to the application
ADI:s (from the buffer pxReadPd) before returning from the function.
As seen below, in the example code, they both call on a service in the Application Data object to
update the information. These functions works, in general, for any process data map, but they
are also slow because of all considerations needed for the general case. For better performance,
please consider writing application specific update functions.
Example:
void ABCC_CbfNewReadPd( void* pxReadPd )
{
/*
** AD_UpdatePdReadData is a general function that updates all ADI:s according
** to current map.
** If the ADI mapping is fixed there is potential for doing that in a more
** optimized way, for example by using memcpy.
*/
AD_UpdatePdReadData( pxReadPd );
}
BOOL ABCC_CbfUpdateWriteProcessData( void* pxWritePd )
{
/*
** AD_UpdatePdWriteData is a general function that updates all ADI:s according
** to current map.
** If the ADI mapping is fixed there is potential for doing that in a more
** optimized way, for example by using memcpy.
*/
return( AD_UpdatePdWriteData( pxWritePd ) );
}
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 36

Step Two
34 (54)
Event Handling
Only 40-series.
In event mode, all events can be configured to be forwarded to the user via the ABCC_
CbfEvent() interface using the configuration defines below, located in the file abcc_drv_
cfg.h.
#define ABCC_CFG_INT_ENABLE_MASK_PAR (ABP_INTMASK_RDPDIEN | ABP_
INTMASK_RDMSGIEN)
#define ABCC_CFG_HANDLE_INT_IN_ISR_MASK (ABP_INTMASK_RDPDIEN)
The configuration above will enable read message and read process data interrupts, but only the
read process data callbacks will be executed in interrupt context directly by the driver. The read
message event will be forwarded to the application by calling the function ABCC_CbfEvent().
This will reduce the amount of work done in the ISR which causes jitter in the process data
handling. Other configurations will of course be possible to set by the user, to increase
performance for any event. At this point the user can trigger the handling of the event from any
chosen context.
If the messaging is fully event driven and messages are sent in an interrupt context, please consider
implementing the critical section porting in abcc_adapt/abcc_sw_port.h. The critical section
functions are described in abcc_drv/inc/abcc_port.h
Example:
void ABCC_CbfEvent( UINT16 iEvents )
{
if( iEvents & ABCC_EVENT_RDMSGI )
{
ABCC_fRdMsgEvent = TRUE;
}
}
The code above illustrates how a task (below) can be triggered by the driver event callback.
volatile BOOL ABCC_fRdMsgEvent = FALSE;
void Task( void )
{
ABCC_fRdMsgEvent = FALSE;
while ( 1 )
{
if( ABCC_fRdMsgEvent )
{
ABCC_fRdMsgEvent = FALSE;
ABCC_TriggerReceiveMessage();
}
}
}
This code depicts a task that handles receive message events.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 37

Step Two
CompactCom driver Anybus CompactCom module
Host application (Interrupt
context)
ReadMessage()
WriteMessage
ABCCInterrupt()
ABCC_Isr()
ABCC_CbfReceiveMsg(msgBuer)
ABCC_SendRespMsg(msgBuer)
Note that this call is
done in interrupt context.
#dene ABCC_CFG_INT_ENABLED ( TRUE )
#dene ABCC_CFG_INT_ENABLE_MASK_PAR ( ABP_INTMASK_RDMSGIEN )
#dene ABCC_CFG_HANDLE_INT_IN_ISR_MASK ( ABP_INTMASK_RDMSGIEN )
CompactCom driver
Anybus CompactCom module
Host application (Interrupt
context)
ReadMessage()
The received message can
be handled in chosen context.
Host application (other
context)
TriggerOtherContext()
ABCCInterrupt()
ABCC_Isr()
End of ISR
ABCC_CbfEvent()
ABCC_CbfReceiveMsg(msgBuer)
ABCC_SendRespMsg(msgBuer) WriteMessage()
ABCC_TriggerReceiveMessage()
#dene ABCC_CFG_INT_ENABLED ( TRUE )
#dene ABCC_CFG_INT_ENABLE_MASK_PAR ( ABP_INTMASK_RDMSGIEN )
#dene ABCC_CFG_HANDLE_INT_IN_ISR_MASK ( 0 )
35 (54)
Handling Events in Interrupt Context
Only 40–series.
Anybus®CompactCom™Host Application Implementation Guide
Handling Events Using ABCC_CbfEvent() Callback Function
Only 40–series.
HMSI-27-334 1.7 en-US
Page 38

Step Two
UINT 8 bSourceId
UINT 8 bDestObj
UINT 16 iInstance
UINT 8 bCmd
UINT 8 bDataSize
UINT 8 bCmdExt 0
UINT 8 bCmdExt 1
UINT 16 iDataSize
UINT 16 iReserved
UINT 8 bSourceId
UINT 8 bDestOb j
UINT 16 iInstance
UINT 8 bCmd
UINT 8 bReserved
UINT 8 bCmdExt 0
UINT 8 bCmdExt 1
255 byte message header
1524 byte message
header
36 (54)
Message Handling
The message handling interface functions are found and described in abcc.h.
To send a command message, the user must use the function ABCC_GetCmdMsgBuffer() to
retrieve a message memory buffer. When receiving a response, the user must handle or copy
needed data from the response buffer within the context of the response handler function.
The function ABCC_GetCmdMsgBuffer() can return a NULL pointer, if no more memory
buffers are available. It is the responsibility of the user to resend the message later or treat it as
a fatal error.
Note: the buffer resources are configured in the file abcc_adapt/abcc_drv_cfg.h.
Note: The CompactCom 40-series devices handle up to 1524 bytes of messaging data, whereas
the 30-series only handle 255 bytes. The message header supporting 1524 byte messages differs
from the 30-series format since the size field need to be 16 bits instead of 8 bits. The driver
supports communication with 30-series devices as well as 40-series devices, but only supports
the new message format in the driver API. If a 30-series device is used, the driver will internally
convert to the legacy message format. The figure below shows the two message formats.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 39

Step Two
CompactCom driver
Anybus CompactCom module
Host application
psMsg = ABCC_GetCmdMsgBuer();
if( psMsg != NULL )
{
ABCC_GetAttribute( psMsg, ABP_OBJ_NUM_ANB, 1,
ABP_ANB_IA_EXCEPTION, ABCC_GetNewSourceId() );
if( ABCC_SendCmdMsg( psMsg, msgRespHandler ) != ABCC_EC_NO_ERROR )
{
APPL_UnexpectedError();
}
}
The user dened message response
handler function is passed
as argument in the send function.
static void msgRespHandler( ABP_MsgType* psMsg )
{
if( ABCC_VerifyMessage( psMsg ) != ABCC_EC_NO_ERROR )
{
APPL_UnexpectedError();
return;
}
/*
** Handle response data
*/
}
ReadMessage()
WriteMessage()
msgBuer:=ABCC_GetCmdMsgBuer()
ABCC_SendCmdMsg(msgBuer, msgRespHandler)
ABCC_RunDriver()
ABCC_RunDriver()
msgRespHandler(msgBuer)
Sending a command to the
CompactCom
37 (54)
Example 1: Sending a command and receiving a response
When sending the command the driver will connect the source ID to the response function, in
this case appl_HandleResp().
The function appl_HandleResp() is called by the driver when a response with the matching
source ID is received.
Note that the received message buffer does not need be freed, this is done internally in the
driver after return from appl_HandleResp().
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 40

Step Two
CompactCom driver
Anybus CompactCom module
Host application
ReadMessage()
void ABCC_CbfReceiveMsg( ABP_MsgType* msgBuer )
{
/*
** Process command message
*/
/*
** Reuse command buer for response
*/
ABP_SetMsgResponse( msgBuer , ABP_UINT8_SIZEOF );
eErr = ABCC_SendRespMsg( msgBuer );
}
WriteMessage()
ABCC_RunDriver()
ABCC_CbfReceiveMsg(msgBuer)
ABCC_SendRespMsg(msgBuer)
Handling of command
received from CompactCom
38 (54)
Example 2: Receiving a command and sending a response
Note: the received command buffer is reused for the response.
The driver uses non-blocking Anybus CompactCom message handling. This means that a state
machine must be used to keep track of commands and responses.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 41

Step Two
39 (54)
Command Sequencer
An alternative way to send messages and commands to the CompactCom device is to use the
command sequencer. The driver provides support for command buffer allocation, resource
control and sequencing of messages. The user must provide functions to build messages and
handle responses.
The command sequencer API is described in abcc_drv\inc\abcc_cmd_seq.h.
An array of ABCC_CmdSeqType's is provided and defines the command sequence to be executed.
The last entry in the array is indicated by NULL pointers. The next command in the sequence will
be executed when the previous command has successfully received a response.
If a command sequence response handler exists the response will be passed to the application.
static const ABCC_CmdSeqType appl_asUserInitCmdSeq[] =
{
ABCC_CMD_SEQ( UpdateIpAddress, NULL ), /* pnCmdHandler, pnRespHandler */
ABCC_CMD_SEQ( UpdateNodeAddress, NULL ),
ABCC_CMD_SEQ( UpdateBaudRate, NULL ),
ABCC_CMD_SEQ_END() /* End of sequence */
};
ABCC_AddCmdSeq( appl_asUserInitCmdSeq, UserInitDone );
If the command sequence response handler is NULL the application will not be notified. If the
error bit is set the application will be notified by the ABCC_CbfDriverError() callback.
If the pnCmdSeqDone function callback exists (UserInitDone in the example above) the
application will be notified when the whole command sequence has finished. The number of
concurrent command sequences is limited by ABCC_CFG_MAX_NUM_CMD_SEQ defined in
abcc_drv_cfg.h.
In example_app/appl_abcc_handler.c, there are two examples of usage of the
command sequencer.
Example 1: When ABCC_CbfUserInitReq() is called, the IP address or node address is set
before ABCC_UserInitComplete() is called.
Example 2: When the Anybus CompactCom device indicates exception state, the exception codes
are read.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 42

This page intentionally left blank
Page 43

Appendix A: Software Overview 41 (54)
A Software Overview
A.1 Folders
Folders
$(ROOT)/abcc_abp
$(ROOT)/abcc_drv/inc
$(ROOT)/abcc_drv/src
$(ROOT)/abcc_adapt
$(ROOT)/abcc_obj
$(ROOT)/example_app
A.2 Root Files
Folders Description
$(ROOT)/main.c
$(ROOT)/abcc_versions.h
Description
This folder includes all Anybus protocol files. It may be updated when new Anybus
CompactCom software releases are available, but is otherwise read only. The
included files are considered read only.
.h files published to the application. The folder contains driver configuration files
for the application as well as for the system dependent part of the driver. The
included files are considered read only.
Anybus CompactCom driver implementation. The included files are considered
read only.
This folder includes all adaptation and configuration files for the driver and the
objects. The files must be modified by the user to configure and adapt the driver
and the example code.
This folder includes all Anybus host object implementations. The files may be
modified by the user.
Example application. The files may be modified by the user.
Main file for the example application.
Contains version defines for example code, driver and abp.
A.3 CompactCom Driver Interface (Read Only)
File Name
/abcc_drv/inc/abcc.h
/abcc_drv/inc/abcc_ad_if.h
/abcc_drv/inc/abcc_cfg.h
/abcc_drv/inc/abcc_port.h
/abcc_drv/inc/abcc_sys_
adapt.h
/abcc_drv/inc/abcc_sys_adapt_
spi.h
/abcc_drv/inc/abcc_sys_adapt_
par.h
/abcc_drv/inc/abcc_sys_adapt_
ser.h
/abcc_drv/inc/abcc_cmd_
seq_if.h
Description
The public interface for the Anybus CompactCom Driver.
Type definitions for ADI mapping.
Configuration parameters of the driver.
Definitions for porting thee Anybus CompactCom to different platforms.
Interface for target dependent functions common to all operating modes.
Interface for target dependent functions needed by abcc_spi_drv.c.
Interface for target dependent functions needed by abcc_par_drv.c.
Interface for target dependent functions needed by abcc_ser_drv.c.
Interface for the command sequencer.
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 44

Appendix A: Software Overview 42 (54)
A.4 Internal Driver Files (Read Only)
The contents of the files in the /abcc/drv/src folder should not be changed.
File Name Description
/abcc_drv/src/abcc_drv_if.h
/abcc_drv/src/abcc_debug_
err.h
/abcc_drv/src/abcc_debug_
err.c
/abcc_drv/src/abcc_link.c
/abcc_drv/src/abcc_link.h
/abcc_drv/src/abcc_mem.c
/abcc_drv/src/abcc_mem.h
/abcc_drv/src/abcc_handler.h
/abcc_drv/src/abcc_handler.c
/abcc_drv/src/abcc_setup.h
/abcc_drv/src/abcc_setup.c
/abcc_drv/src/abcc_remap.c
/abcc_drv/src/abcc_timer.h
/abcc_drv/src/abcc_timer.c
abcc_drv\src\abcc_cmd_seq.c
abcc_drv\src\abcc_cmd_seq.h
Interface for low level driver implementing the specific operating mode.
Help macros for debugging and error reporting.
Message buffer handling and message queue handling.
Message resource memory support used by abcc_link.c.
Anybus CompactCom handler implementation including handler parts that are
independent of operating mode.
Anybus CompactCom handler implementation including setup state machine.
Anybus CompactCom handler implementation for remapping process data at
runtime.
Support for Anybus CompactCom driver timeout functionality.
Message command sequencer.
A.4.1 8/16 Bit Parallel Event Specific Files
File Name
/abcc_drv/src/par/abcc_
handler_par.c
/abcc_drv/src/par/abcc_
par_drv.c
/abcc_drv/src/par/abcc_
drv_par_if.h
Description
Implements ABCC_RunDriver() and ABCC_ISR().
Implements the driver for parallel operating mode.
Implements the parallel driver interface.
A.4.2 SPI Specific Files
File Name
/abcc_drv/src/par/abcc_
handler_spi.c
/abcc_drv/src/spi/abcc_spi_
drv.c
/abcc_drv/src/spi/abcc_drv_
spi_if.h
/abcc_drv/src/spi/abcc_crc32.c
/abcc_drv/src/spi/abcc_crc32.h
Description
Implements ABCC_RunDriver() and ABCC_ISR().
Implements the driver for SPI operating mode.
Implements the SPI driver interface.
Crc32 implementation used by SPI.
A.4.3 8 Bit Parallel Half Duplex Specific Files
File Name Description
/abcc_drv/src/par30/abcc_
handler_par30.c
/abcc_drv/src/par30/abcc_
par30_drv.c
/abcc_drv/src/par30/abcc_
drv_par30_if.h
Implements ABCC_RunDriver() and ABCC_ISR().
Implements the driver for parallel 30 half duplex operating mode.
Implements the parallel 30 half duplex driver interface.
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 45

Appendix A: Software Overview 43 (54)
A.4.4 Serial Specific Files
File Name
/abcc_drv/src/serial/abcc_
handler_ser.c
/abcc_drv/src/serial/abcc_
serial_drv.c
/abcc_drv/src/serial/abcc_
drv_ser_if.h
/abcc_drv/src/serial/abcc_
crc16.c
/abcc_drv/src/serial/abcc_
crc16.h
Description
Implements ABCC_RunDriver() and ABCC_ISR().
Implements the driver for serial operating mode.
Implements the serial driver interface.
Crc16 implementation used by Serial.
A.5 System Adaptation Files
File Name
/abcc_adapt/abcc_drv_cfg.h
/abcc_adapt/abcc_
identification.h
/abcc_adapt/abcc_obj_cfg.h
/abcc_adapt/abcc_sw_port.c
/abcc_adapt/abcc_sw_port.h
/abcc_adapt/abcc_sys_adapt.c
/abcc_adapt/abcc_td.h
/abcc_adapt/abcc_platform_cfg.h Platform specific defines overriding defines in abcc_adapt/abcc_obj_cfg.h, abcc_
Description
User configuration of the CompactCom driver. The configuration parameters are
documented in the driver's public interface abcc_cfg.h.
User configuration to set the identification parameters of an CompactCom module.
User configuration of the Anybus object implementation.
Platform dependent macros and functions required by the CompactCom driver and
Anybus object implementation.
Platform dependent macros and functions required by the CompactCom driver and
Anybus object implementation. The description of the macros are found in abcc_
port.h. The file abcc_port.h is found in the public CompactCom driver interface.
-
Definition of CompactCom types.
adapt/abcc_drv_cfg.h and abcc_adapt/abcc_identification.h.
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 46

Appendix B: API 44 (54)
B API
B.1 API Documentation
The Anybus CompactCom API layer defines a common interface for all network applications to
the Anybus CompactCom driver. For more information about the interface, see /abcc_dev/inc/
abcc.h.
API Functions
Function Description
ABCC_StartDriver() Initiates the driver, enables interrupt, and sets the operating mode.
ABCC_IsReadyforCommunication() This function must be polled after the ABCC_StartDriver() until it
ABCC_ShutdownDriver() Stops the driver and puts it into SHUTDOWN state.
ABCC_HWReset() Module hardware reset.
ABCC_HWReleaseReset() Releases the module reset.
ABCC_RunTimerSystem() Handles all timers for the CompactCom driver. It is recommended to
ABCC_RunDriver() Drives the CompactCom driver sending and receiving mechanism. This
ABCC_UserInitComplete() This function should be called by the application when the last
ABCC_SendCmdMsg() Sends a command message to the module.
ABCC_SendRespMsg() Sends a response message to the module.
ABCC_SendRemapRespMsg() Sends a remap response to the module.
ABCC_SetAppStatus() Sets the current application status, according to ABP_AppStatusType in
ABCC_GetCmdMsgBuffer() Allocates the command message buffer.
ABCC_ReturnMsgBuffer() Frees the message buffer.
ABCC_TakeMsgBufferOwnership() Takes the ownership of the message buffer
ABCC_ModCap() Reads the module capability. This function is only supported by the
ABCC_LedStatus() Reads the LED status. Only supported in SPI and parallel operating
ABCC_AnbState() Reads the current Anybus state.
ABCC_GetCmdQueueSize() Sends a response message to the ABCC.
ABCC_GetAppStatus() Sets the current application status.
ABCC_ReadModuleId() Detects if a module is present. If the MD pins on the host connector are
ABCC_ModuleDetect() Reads the module capability. This function is only supported by the
When this function has been called the timer system can be started.
Note! This function will NOT release the reset of the module.
returns the value TRUE. This indicates that the module is ready for
communication and the CompactCom setup sequence is started.
ABCC_ShutdownDriver() is called from this function.
Note! This function will only set reset pin to low. It is the responsibility
of the caller to make sure that the reset time (the time between the
ABCC_HWReset() and ABCC_HWReleaseReset() calls) is long enough.
call this function on a regular basis from a timer interrupt. Without this
function no timeout and watchdog functionality will work.
main routine should be called cyclically during polling.
response from the user specific setup has been received. This will end
the CompactCom setup sequence and ABCC_SETUP_COMPLETE will be
sent.
abp.h.
parallel operating mode.
mode.
The received command buffer can be reused as a response buffer. If a
new buffer is used, the function ABCC_GetCmdMsgBuffer() must be
used to allocate the buffer.
This information is only supported in SPI and parallel operating mode.
When used for other operating modes the call has no effect.
not connected, TRUE will be returned.
Anybus CompactCom 40 parallel mode.
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 47

Appendix B: API 45 (54)
API Functions (continued)
Function Description
ABCC_IsSupervised() Retrieves the network type. This function will return a valid value after
ABCC_HWInit
ABCC_CbfAdiMappingReq has been called by the driver. If called earlier
the function will return 0xFFFF which indicates that the network is
unknown. The different network types ca be found in abp.h.
This function will initiate the driver, enable interrupt, and set the
operation mode. If a firmware update is pending, a delay
(iMaxStartupTime) can be defined, describing how long the driver is to
wait for the startup interrupt. If the iMaxStartupTIme is set to zero (0)
the driver will use the ABCC_CFG_STARTUP_TIME_MS time. When this
function has been called the timer system can be started, see ABCC_
RunTimerSystem().
This function will not release the reset of the Anybus CompactCom. To
release the reset, ABCC_HwReleaseReset() has to be called by the
application.
API Event Related Functions
Function Description
ABCC_ISR() This function should be called from inside the CompactCom interrupt
ABCC_TriggerRdPdUpdate()
ABCC_TriggerReceiveMessage() Triggers a message receive read.
ABCC_TriggerWrPdUpdate() Indicates that new process data from the application is available and
ABCC_TriggerAnbStatusUpdate() Checks for Anybus status change.
ABCC_TriggerTransmitMessage() Checks sending queue.
routine to acknowledge and handle received CompactCom events
(triggered by the IRQ pin on the CompactCom application interface)
Triggers a RdPd read.
will be sent to the CompactCom.
API Callbacks
Function Description
ABCC_CbfAdiMappingReq() The function is called when the driver is about to start the automatic
ABCC_CbfUserInitReq() The function is called to trigger a user specific setup during the module
ABCC_CbfUpdateWriteProcessData() Updates the current write process data. The data must be copied into
ABCC_CbfNewReadPd() Called when new process data has been received. The process data
ABCC_CbfReceiveMsg() A message has been received from the module. This is the receive
ABCC_CbfWdTimeout() The function is called when communication with the module has been
ABCC_CbfWdTimeoutRecovered() Indicates a recent CompactCom watchdog timeout but now the
ABCC_CbfRemapDone() This callback is invoked when REMAP response is successfully sent to
ABCC_CbfAnbStateChanged() This callback is invoked if the module changes status i.e. if Anybus state
ABCC_CbfEvent() Called for unhandled events.
ABCC_CbfSync_Isr() If sync is supported this function will be invoked at the sync event.
ABCC_CbfDriverError() This callback is invoked if the Anybus CompactCom changes states, see
process data mapping.
It returns mapping information for read and write PD.
setup state.
the buffer before returning from the function.
needs to be copied to the application ADI:s before returning from the
function.
function for all received commands from the module.
lost.
communication is working again.
the module.
or supervision state is changed.
Unhandled events are events enabled in ABCC_USER_INT_ENABLE_
MASK but not present in ABCC_USER_HANDLE_IN_ABCC_ISR_MASK.
ABP_AnbStateType in abp.h for more information.
All the API callback functions above need to be implemented by the application.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 48

Appendix B: API 46 (54)
Support Functions
Function Description
ABCC_NetworkType() Retrieves the network type.
ABCC_ModuleType() Retrieves the module type.
ABCC_NetFormatType() Retrieves the network endianness.
ABCC_ParameterSupport() Retrieves the parameter support.
ABCC_GetOpmode() Calls ABCC_SYS_GetOpmode() to read the operating mode from HW.
ABCC_GetAttribute() Fills an Anybus CompactCom message with parameters to get an
attribute.
ABCC_SetByteAttribute() Fills an Anybus CompactCom message with parameters in order to set
an attribute.
ABCC_VerifyMessage() Verifies an Anybus CompactCom response message.
ABCC_GetDataTypeSize() Returns the size of an ABP data type.
ABCC_SetMsgHeader() Sets the input arguments to the ABCC message header correctly
ABCC_GetNewSourceId() Returns a new source Id that can be used when sending a command
message.
ABCC_GetDataTypeSizeInBits
Returns the size of an ABP data type in bits.
®
Anybus
CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 49

Appendix C: Host Application State Machine 47 (54)
C Host Application State Machine
The application flow in the example code is maintained using the state machine described in the
flowchart below.
The function APPL_HandleAbcc(), found in example_app/appl_abcc_handler.h, is called cyclically
from the main loop. It implements the state machine and is responsible for the execution of
various tasks during each state.
The first time APPL_HandleAbcc() is called, state APPL_INIT is entered.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 50

Appendix C: Host Application State Machine 48 (54)
APPL_INIT
• Checks that an Anybus CompactCom device is detected.
• The Application Data object is initiated, using the desired ADI mapping. In this example, it is
one of the ADI mapping examples described in Example Application, p. 29.
• ABCC_StartDriver() is called to initiate the driver.
• ABCC_HwReleaseReset() is called to release the Anybus CompactCom device reset.
• Sets state to APPL_WAITCOM.
APPL_WAITCOM
• Waits for the Anybus CompactCom device to signal that it is ready to communicate.
• Sets state to APPL_RUN.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 51

Appendix C: Host Application State Machine 49 (54)
APPL_RUN
• ABCC_RunDriver() is called to run the driver. Callbacks will be invoked for specific events. All
callbacks used by the driver are named ABCC_Cbf<x>(). The required callbacks are all
implemented in example_app/appl_abcc_handler.c.
• During startup the following events will be triggered by the driver (in the described order):
– ABCC_CbfAnbStateChanged() will be called when the Anybus CompactCom device has
entered ABP_ANB_STATE_SETUP. If desired, set a breakpoint or use a debug function
to indicate state changes.
– ABCC_CbfAdiMappingReq() will be called when the CompactCom device is ready to
send the default mapping command. The generic example code will ask the Application
Data object for the configured default map.
– ABCC_CbfUserInitReq() will be called when it is possible for the application to send
commands to configure or read information to/from the CompactCom device. In the
example code, the function triggers the user init state machine to start sending a
command sequence to the CompactCom device. When the last message response is
received, the function ABCC-UserInitComplete() is called to notify the driver that the
user init sequence has ended. This will internally trigger the driver to send a SETUP_
COMPLETE command to the CompactCom device. If no user init is needed, ABCC_
UserInitComplete() can be called directly from ABCC_CbfUserInitReq().
– When setup is complete, the CompactCom device will enter state ABP_ANB_STATE_
NW_INIT. This means that ABCC_CbfStateChanged() will be called. In this state a
number of commands will be sent from the CompactCom device to the host
application objects. All received commands will be handled in ABCC_CbfReceiveMsg().
The responses to the commands depend on which host objects that are implemented,
and the configuration made in abcc_identification.h and abcc_obj_cfg.h. If desired, set
a breakpoint in ABCC_CfgReceiveMsg() to indicate the commands that are sent and
how they are handled.
– When network initiation is done, the CompactCom device will enter state ABP_ANB_
STATE_WAIT_PROCESS. Again, ABCC_CbgStateChanged() will be called by the driver. At
this point, it is possible to set up an IO connection from the network.
• When the startup sequence is completed, the following events can be triggered:
– When an IO connection is set up, the CompactCom will enter state ABP_ANB_STATE_
PROCESS_ACTIVE (or, on some networks, ABP_ANB_STATE_IDLE). When process data is
received from the CompactCom device, the ABCC_CbfNewReadPd() function is called.
The example code then forwards the data to the Application Data object by calling AD_
UpdatePdReadData(), to update the ADIs. The example code only loops data, so at the
end of the function body, ABCC_TriggerWrPdUpdate() is called to update the write
process data. The ABCC_TriggerWrPdUpdate() function triggers ABCC_
CbfUpdateWriteProcessData(), which is called whenever the driver is ready to send
new process data. ABCC_TriggerWrPdUpdate() should always be called when updated
write process data is available.
– If state ABP_ANB_STATE_EXCEPTION is entered, the cause of the exception can be read
from the CompactCom device by activating the exception read state machine.
RunExceptionSM() will be called from state APPL_RUN when the CompactCom device is
in state ABP_ANB_STATE_EXCEPTION.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 52

Appendix C: Host Application State Machine 50 (54)
– APPL_Reset() is called to initiate a restart of the device. This will happen if the
application host object receives a reset request from the CompactCom device. The
CompactCom handler state machine will then enter state APPL_ABCCRESET and start
over from APPL_INIT.
– APPL_RestartAbcc() is, like APPL_Reset(), used to initiate a restart of the device. If
called, the CompactCom handler state machine will then enter state APPL_ABCCRESET.
(Currently this function is not used in the example code. It could be used instead of
APPL_Reset(), since it avoids power cycling.
– APPL_Shutdown() is called to initiate a shutdown of the driver.
APPL_SHUTDOWN
• ABCC_HWReset() is called to reset the Anybus CompactCom device.
• Sets state to APPL_HALT.
APPL_ABCCRESET
• ABCC_HWReset() is called to reset the Anybus CompactCom device.
• Sets state to APPL_INIT.
APPL_DEVRESET
• ABCC_HWReset() is called to reset the Anybus CompactCom device.
• Sets state to APPL_HALT.
The return value to the main loop (via the function call from APPL_AbccHandler()) will indicate
that the device should be reset.
APPL_HALT
No action.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 53

D 30- and 40-series Modules in the Same Application
The Host Application Example Code, provided for communication with the Anybus CompactCom,
supports both 30-series and 40-series in the same application. Depending on what series is
mounted, the driver will adjust its settings to use the correct communication protocol.
The Host Application Example Code can be downloaded here: www.anybus.com/starterkit40.
Some adaptions of the code for the target system are needed to automatically be able to switch
between the 30-series and the 40-series. There are also some things to consider when preparing
the hardware design to be able to use both series in the same application.
D.1 Hardware Design Considerations
The 30-series only supports the 8-bit parallel interface and the serial interface. I.e. in order to
use both the 30-series and the 40-series in the same application, at least one of those interfaces
are mandatory to implement.
Use the table below, and make sure the needed interfaces are implemented when designing the
host application hardware. In new designs, it is strongly recommended to use the Event protocol
for the 40-series.
Communication Interface 30-series protocol support 40-series protocol support
Serial Interface Ping-Pong protocol Ping-Pong protocol
Parallel 8-bit Ping-Pong protocol Ping-Pong protocol and Event
Parallel 16-bit Not available Event protocol
SPI
Not available Event protocol
protocol
The OM3 signal in the host application connector shares the same pin as the Tx-signal in the 40series, and it is not available in the 30-series. To use the serial interface and the parallel 8-bit
interface with the Ping-Pong protocol in the 40-series, this pin must be pulled up to 3.3V. A weak
internal pull-up is present in the Anybus CompactCom hardware.
Also see the Module Identification section below for more hardware related recommendations.
D.2 Module Identification
In order to automatically detect what module type is mounted, the Module Identification pins
(MI[0..1]) need to be connected (signals are available in the host application connector), and the
function ABCC_SYS_ReadModuleId() must be adapted in the code.
1. In abcc_adapt/abcc_drv_cfg.h:
#define ABCC_CFG_MODULE_ID_PINS_CONN ( TRUE )
2. Adapt the function ABCC_SYS_ReadModuleId() and return one of the following values
depending on what module type is mounted:
ABP_MODULE_ID_ACTIVE_ABCC40
ABP_MODULE_ID_ACTIVE_ABCC30
If the Module Identification pins are not implemented in the hardware, the Module ID must be
set with the define ABCC_CFG_ABCC_MODULE_ID.
1. Disable the possibility to automatically read module ID in abcc_adapt/abcc_drv_cfg.h.
#define ABCC_CFG_MODULE_ID_PINS_CONN ( FALSE )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 54

2. Define the current module ID in abcc_adapt/abcc_drv_cfg.h.
For a 40-series module:
#define ABCC_CFG_ABCC_MODULE_ID
ABP_MODULE_ID_ACTIVE_ABCC40
For a 30-series module:
#define ABCC_CFG_ABCC_MODULE_ID
ABP_MODULE_ID_ACTIVE_ABCC30
If the module identity is required for some reason later in the code, the function ABCC_
ModuleType() will return the module type for the currently mounted module.
D.3 Enable Supported Communication Interfaces
The 30-series supports the serial and the 8-bit parallel communication interfaces. The 40-series
supports all communication interfaces listed below. For more information about the
communication interfaces, see abcc_drv/inc/abcc_cfg.h. Only enable the communication
interfaces that will actually be used, since every enabled interface will increase the memory size
needed.
In abcc_adapt/abcc_drv_cfg.h, enable supported communication interfaces, e.g.:
#define ABCC_CFG_DRV_PARALLEL ( FALSE ) //Only for 40-series
#define ABCC_CFG_DRV_SPI ( TRUE ) //Only for 40-series
#define ABCC_CFG_DRV_SERIAL ( TRUE ) //30- and 40-series
#define ABCC_CFG_DRV_PARALLEL_30 ( FALSE ) //30- and 40-series
D.4 Select Operating Mode
Since the operating mode can differ between a 40-series module and a 30-series module, it must
either be configured by adapting the functions ABCC_SYS_GetOpmode() and ABCC_SYS_
SetOpmode(), or by setting a fixed operating mode for each module type.
If the operating mode is configurable with the above functions, the following must be
implemented, and the operating mode pins OM0-OM3 (signals available in the host application
connector) must be controllable from the host processor:
1. Enable the operating mode to be gettable from an external source (e.g. configurable via a
parameter).
#define ABCC_CFG_OP_MODE_GETTABLE ( TRUE )
2. Implement the function ABCC_SYS_GetOpmode() to return the configured operating
mode.
3. Enable whether the operating mode is settable via hardware pins on the host processor
connected to the Anybus CompactCom.
#define ABCC_CFG_OP_MODE_SETTABLE ( TRUE )
4. Implement the function ABCC_SYS_SetOpmode() to set the configured operating mode
to the Anybus CompactCom (controlling the OM0-OM3 signals).
If the operating mode is fixed (and never changed) for each module type, the following defines
can be used in abcc_adapt/abcc_drv_cfg.h.
1. Disable the function to get the operating mode from an external source.
#define ABCC_CFG_OP_MODE_GETTABLE ( FALSE )
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 55

2. Set a fixed operating mode for each module type, e.g.:
#define ABCC_CFG_ABCC_OP_MODE_30
#define ABCC_CFG_ABCC_OP_MODE_40
The following options are available for the operating mode settings:
ABP_OP_MODE_SPI
ABP_OP_MODE_16_BIT_PARALLEL
ABP_OP_MODE_8_BIT_PARALLEL
ABP_OP_MODE_SERIAL_19_2
ABP_OP_MODE_SERIAL_57_6
ABP_OP_MODE_SERIAL_115_2
ABP_OP_MODE_SERIAL_625
3. To set the operating mode physically to the Anybus CompactCom, it is also in this case
possible to enable the define ABCC_CFG_OP_MODE_SETTABLE, and implement the
function ABCC_SYS_SetOpmode().
#define ABCC_CFG_OP_MODE_SETTABLE ( TRUE )
D.5 Message Data Size
The 30-series supports up to 255 bytes of message data. The 40-series supports up to 1524 bytes
of message data. This value is used when compiling to set up internal buffers and shall be
configured for the largest size that will be used in the application. Remember to consider the
limitations for the different module types when sending a message. The define can be found in
abcc_adapt/abcc_drv_cfg.h.
ABP_OP_MODE_SERIAL_115_2
ABP_OP_MODE_SPI
//Only for 40-series
//Only for 40-series
//30- and 40-series
//30- and 40-series
//30- and 40-series
//30- and 40-series
//30- and 40-series
#define ABCC_CFG_MAX_MSG_SIZE ( 255 )
D.6 Process Data Size
The 30-series supports up to 256 bytes of process data in either direction. The 40-series supports
up to 4096 bytes of process data in either direction. This value is used when compiling to set up
internal buffers and shall be configured for the largest size that will be used in the application.
Remember to consider the limitations for the different module types when mapping the process
data. The define can be found in abcc_adapt/abcc_drv_cfg.h.
#define ABCC_CFG_MAX_PROCESS_DATA_SIZE ( 256 )
D.7 Supported Data Types
The 40-series has support for additional data types for the ADIs. When creating the ADIs to be
used for the product, make sure the used data types are supported by the used modules.
The data types BOOL1, BITS8, BITS16, BITS32, OCTET, PADx, and BITx are only supported by the
40-series. Structs of any data type are only supported by the 40-series.
Anybus®CompactCom™Host Application Implementation Guide
HMSI-27-334 1.7 en-US
Page 56

last page
© 2020 HMS Industrial Networks
Box 4126
300 04 Halmstad, Sweden
info@hms.se HMSI-27-334 1.7 en-US / 2020-03-09 / 17557
 Loading...
Loading...