

Page 1
RR
Ready for Radio
RR MiniMag # 26 4211
D
F
GB
I
E
© Copyright by MULTIPLEX 2006 Version 02.1a
Bauanleitung 3-10
Notice de construction 11-18
Building instructions 19-34
Instruzioni di montaggio 35-42
Instrucciones de montaje 43-50
1
Page 2
D
Sicherheitshinweise
Prüfen Sie vor jedem Start den festen Sitz des Motors und der Luftschraube - insbesondere nach dem Transport, härteren Landungen
☺
sowie Abstürzen. Prüfen Sie ebenfalls vor jedem Start den festen Sitz und die richtige Position der Tragflächen auf dem Rumpf.
☺ Akku erst einstecken, wenn Ihr Sender eingeschaltet ist und Sie sicher sind, daß das Bedienelement für die Motorsteuerung auf "AUS"
steht.
☺ Im startbereiten Zustand nicht in den Bereich der Luftschraube greifen.
Vorsicht in der Luftschraubendrehebene - auch Zuschauer zur Seite bitten!
☺ Zwischen den Flügen die Motortemperatur durch vorsichtige Fingerprobe prüfen und
vor einem Neustart den Motor ausreichend abkühlen lassen. Die Temperatur ist richtig, wenn Sie den Motor problemlos berühren
können. Insbesondere bei hohen Außentemperaturen kann dieses bis zu 15 Minuten dauern.
☺ Denken Sie immer daran: Niemals auf Personen und Tiere zufliegen.
F
Conseils de sécurité
☺
Avant chaque décollage, vérifiez la fixation du moteur et de l'hélice, notamment après le transport, après les atterrissages violents et
après un “Crash”. Vérifiez également, avant chaque décollage la fixation ainsi que le positionnement de l’aile par rapport au fuselage.
☺ Ne branchez l’accu de propulsion que si vous êtes sûr que votre émetteur est allumé et que l’élément de commande moteur est en
position “ARRET”.
☺ Ne mettez pas vos doigts dans l’hélice! Attention à la mise en marche, demandez également aux spectateurs de reculer.
☺ Entre deux vols, vérifiez en posant un doigt dessus, la température du moteur, laissezle refroidir suffisamment avant le prochain
décollage. La température est correcte si vous pouvez maintenir votre doigt ou votre main sur le moteur. Le temps de refroidissement
peut varier jusqu’à 15 minutes s’il fait particulièrement chaud.
☺ Pensez-y toujours: ne volez jamais vers ou au-dessus des personnes ou des animaux.
GB
Safety notes
Before every flight check that the motor and propeller are in place and secure - especially after transporting the model, and after hard
☺
landings and crashes. Check also that the wing is correctly located and firmly secured on the fuselage before each flight.
☺ Don’t plug in the battery until you have switched on the transmitter, and you are sure that the motor control on the transmitter is set to
“OFF”.
☺ When the model is switched on, ready to fly, take care not to touch the propeller. Keep well clear of the propeller disc too, and ask
spectators to stay back.
☺ Allow the motor to cool down after each flight. You can check this by carefully touching the motor case with your finger. The
temperature is correct when you can hold your finger on the case without any problem. On hot days this may take up to 15 minutes.
☺ Please keep in mind at all times: don’t fly towards people or animals.
I
Note di sicurezza
☺ Prima di ogni decollo controllare che il motore e la eliche siano fissati stabilmente - specialmente dopo il trasporto, atterraggi duri e se il
modello è precipitato. Controllare prima del decollo anche il fissaggio e la posizione corretta delle ali sulla fusoliera.
☺ Collegare la batteria solo quando la radio è inserita ed il comando del motore è sicuramente in posizione ”SPENTO”.
☺ Prima del decollo non avvicinarsi al campo di rotazione della eliche. Attenzione alla eliche in movimento - pregare che eventuali spettatori
si portino alla dovuta distanza di sicurezza!
☺ Tra un volo e l’altro controllare cautamente con le dita la temperatura del motore e farli raffreddare sufficientemente prima di ogni nuovo
decollo. La temperatura è giusta se si possono toccare senza problemi. Specialmente con una temperatura esterna alta questo può
durare fino a 15 minuti.
☺ Fare attenzione: Non volare mai nella direzione di persone ed animali.
E
Advertencias de seguridad
☺ Compruebe antes de cada despegue que el motor y la hélice estén fuertemente sujetados, sobretodo después de haberlo transportado,
de aterrizajes más fuertes así como después de una caída. Compruebe igualmente antes de cada despegue que las alas estén bien
sujetas y bien colocadas en el fuselaje.
☺ Conectar la batería, cuando la emisora esté encendida y Usted esté seguro que el elemento de mando para el motor esté en ”OFF”.
☺ No meter la mano en la zona inmediata a la hélice cuando el avión esté a punto de despegar. ¡Cuidado con la zona de la hélice! ¡Pedir a
los espectadores que se aparten!
☺ Entre los vuelos hay que comprobar cuidadosamente la temperatura del motor con el dedo y dejar que el motor se enfríe antes de volver
a despegar. La temperatura es correcta, si puede tocar el motor sin problemas. Sobretodo en el caso de temperaturas del ambiente muy
altas, esto puede tardar unos 15 minutos.
☺ Recuerde: No volar nunca hacía personas o animales.
2
Page 3
RR # 26 4211
Machen Sie sich mit dem Bausatz vertraut!
MULTIPLEX – Modellbaukästen unterliegen während der Produktion einer ständigen Materialkontrolle. Wir hoffen, dass
Sie mit dem Baukasteninhalt zufrieden sind. Wir bitten Sie jedoch, alle Teile (nach Stückliste) vor Verwendung zu
prüfen, da bearbeitete Teile vom Umtausch ausgeschlossen sind. Sollte ein Bauteil einmal nicht in Ordnung sein,
sind wir nach Überprüfung gern zur Nachbesserung oder zum Umtausch bereit. Bitte senden Sie das Teil, bitte ausreichend frankiert, an unsere Modellbauabteilung und fügen Sie unbedingt den Kaufbeleg und eine kurze Fehlerbeschreibung
bei.
Wir arbeiten ständig an der technischen Weiterentwicklung unserer Modelle. Änderungen des Baukasteninhalts in
Form, Maß, Technik, Material und Ausstattung behalten wir uns jederzeit und ohne Ankündigung vor. Bitte haben Sie
Verständnis dafür, dass aus Angaben und Abbildungen dieser Anleitung keine Ansprüche abgeleitet werden können.
Achtung!
Ferngesteuerte Modelle, insbesondere Flugmodelle, sind kein Spielzeug im üblichen Sinne. Ihr Bau und
Betrieb erfordert technisches Verständnis, ein Mindestmaß an handwerklicher Sorgfalt sowie Disziplin und
Sicherheitsbewusstsein. Fehler und Nachlässigkeiten beim Bau und Betrieb können Personen- und Sachschäden zur Folge haben. Da der Hersteller keinen Einfluss auf ordnungsgemäßen Zusammenbau, Wartung
und Betrieb hat, weisen wir ausdrücklich auf diese Gefahren hin.
Zusätzlich zum Modell Mini Mag erforderlich:
Klebstoff und zugehöriger Aktivator:
Sekundenkleber „leicht verdickt“ (Cyanacrylat-Kleber) in Verbindung mit Aktivator verwenden kleber! Epoxy Klebstoffe geben eine zunächst subjektiv brauchbare Verbindung, jedoch platzt der harte Kleber bei
Belastung von den Teilen ab. Die Verbindung ist nur oberflächlich.
Alternativ kann auch Heisskleber verwendet werden!
keinen Styropor-Sekunden-
D
MULTIPLEX Fernsteuerelemente für Mini Mag:
z.B. Empfänger PiCO 5/6 UNI 35 MHz A Best.-Nr. 5 5920
alternativ 40 MHz Best.-Nr. 5 5921
oder Empfänger Micro IPD UNI 35 MHz A Best.-Nr. 5 5971
alternativ 40 MHz Best.-Nr. 5 5972
und optional
Servo NanoS UNI oder HS 55 (2x erforderlich) Quer Best.-Nr. 6 5120
Verlängerungskabel 300 mm UNI Querruderservo 2x Best.-Nr. 8 5031
ggf. Trennfilterkabel 200 mm UNI Querruderservo 2x Best.-Nr. 8 5035
und optional
MagicMixer #1 für 3Kanal Fernsteuersender ohne Mischer Best.-Nr. 7 3000
V-Kabel (UNI) für 4-Kanal Fernsteuersender mit sep. SR Ansteuerung Best.-Nr. 8 5030
Antriebsakkus:
z.B. MULTIPLEX Antriebsakku Permabatt NiMh (AA-Mignon)7 / 1500 mAh Best.-Nr. 15 6030
oder MULTIPLEX Antriebsakku Permabatt NiMh (AA-Mignon)8 / 1500 mAh Best.-Nr. 15 6037
oder MULTIPLEX Antriebsakku Li-Batt (LiPo) P-CS 2 / 1-2000 mAh Best.-Nr. 15 7016
oder MULTIPLEX Antriebsakku Li-Batt (LiPo) SH BX 2 / 1-2100 mAh Best.-Nr. 15 7130
Ladegerät:
MULTIcharger LN-5014 DC (Ladestrom 100mA ...5A) 1-14 Zellen NiCd/NiMH Best.-Nr. 9 2531
und 1-5 Zellen Lithium Polymer
Option
Schwimmer Satz Best.-Nr. 73 3069
Tuning 1: Antriebssatz vom Easy Glider (Getriebe 3:1 mit Permax 400) Best.-Nr. 33 2688
dazu Mitnehmer Ø 3,5 Best.-Nr. 33 2310
u. Luftschraube 8 x 3,8 “ Best.-Nr. 73 3139
Tuning 2: Antriebssatz „Sport“ BL-X 22-18
Inhalt: Motor, Mitnehmer, Regler und Luftschraube Best.-Nr. 33 2627
Werkzeuge:
Schere, Klingenmesser, Kombizange und je ein kleiner Kreuz- und Schlitzschraubendreher für Servohebel und
Motorschrauben, ggf. Lötkolben.
Hinweis: Bildseiten aus der Mitte der Bauanleitung heraustrennen!
3
Page 4
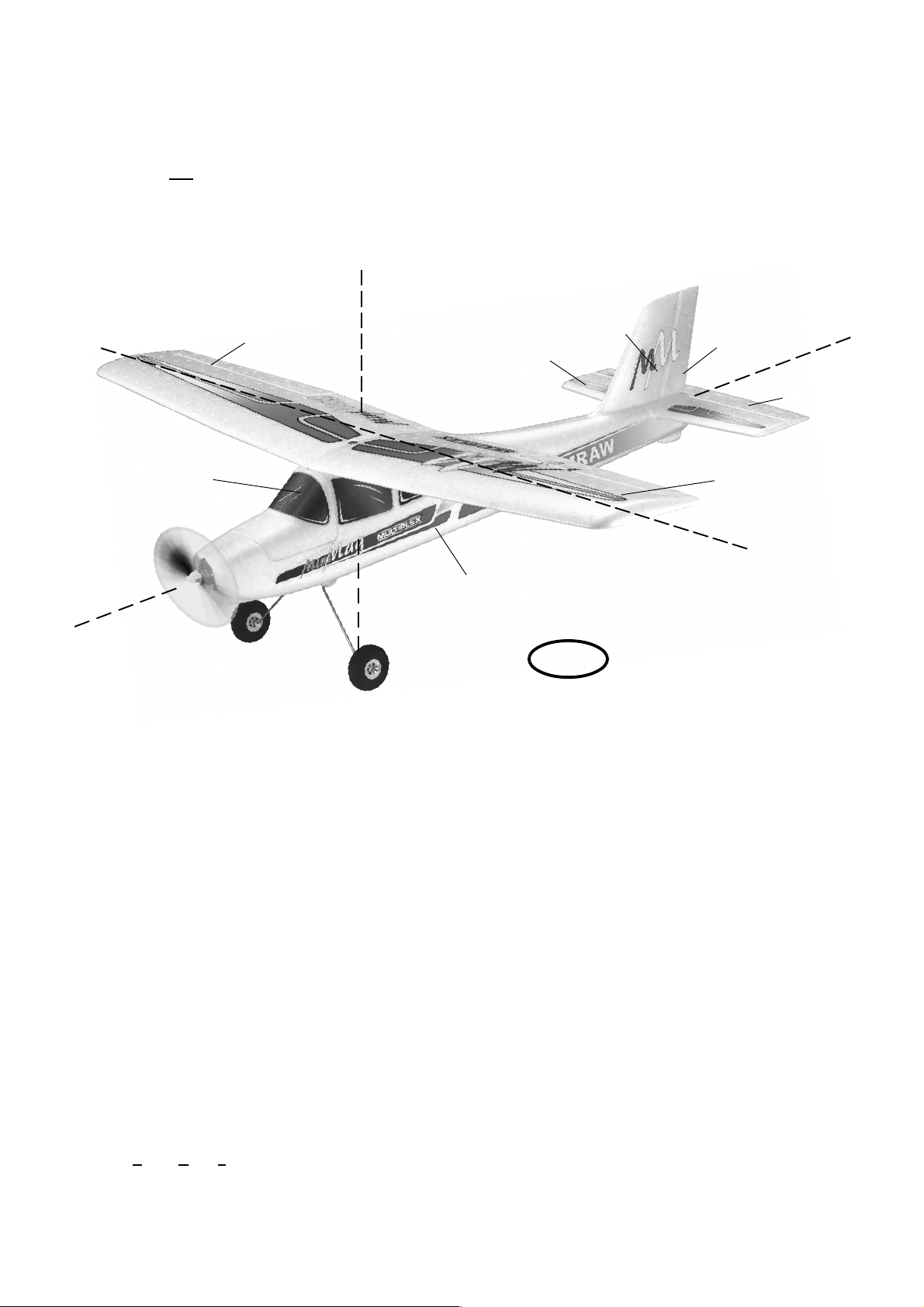
Technische Daten:
Spannweite 1010 mm
Rumpflänge ü. a. 820 mm
Fluggewicht ab 580 g
Flächenbelastung (FAI) ab 26 g/dm²
Antrieb ab Permax 400 6 V
RC-Funktionen Höhen-, Seiten- und Motorsteuerung
Option Querruder
Wichtiger Hinweis
Dieses Modell ist nicht aus Styropor ™! Daher sind
Verklebungen mit Weißleim oder Epoxy
lich. Verwenden Sie nur Cyanacrylatkleber, vorzugsweise in Verbindung mit Aktivator (Kicker). Für alle
Verklebungen verwenden Sie Cyanacrylatkleber
(Sekundenkleber) in mittlerer Viskosität. Sprühen Sie
bei Elapor® immer eine Seite mit Aktivator (Kicker)
ein – lassen diesen ablüften und geben Sie auf die
andere Seite den Cyanacrylatkleber an. Fügen Sie
die Teile zusammen und positionieren Sie diese sofort.
Vorsicht beim Arbeiten mit Cyanacrylatklebern. Diese
Kleber härten in Sekunden, daher nicht mit den Fingern und anderen Körperteilen in Verbindung bringen. Zum Schutz der Augen unbedingt Schutzbrille
tragen! Von Kindern fernhalten!
nicht mög-
Noch eine Option
Für den Schwimmerbetrieb ist ein Wasserruder ist aus 3
mm Depron anzufertigen. Es wird mit Klebeband (z.B.
Tesa) zwischen den Stahldraht geklebt. Die Befestigung
erfolgt mit zwei Stellringen am Spornraddraht. Diese Teile sind im Schwimmerbausatz enthalten.
4. Motoreinbau
Der Standard Antrieb, Permax 400 ist bereits eingebaut.
Sie können sich aber auch für Tuning entscheiden.
Wir empfehlen zwei Möglichkeiten.
A. Standard G Permax 400 mit Getriebe 3:1. Abb. 20
Antriebssatz vom Easy Glider E
(Getriebe 3:1 mit Permax 400) # 33 2688
dazu Mitnehmer Ø 3,5 mm # 33 2310
u. Luftschraube 8 x 3,8 “ # 73 3139
B. Antriebssatz „Sport“ BL-X 22-18 # 33 2627
hier sind Controler, Mitnehmer und Luftschraube
enthalten
5. Motor anschließen
Probelauf durchführen! Die Motorwelle / Luftschraube muß,
bei Ansicht von vorn, immer gegen den Uhrzeigersinn drehen. Ggf. am Motor umpolen.
1. Vor dem Bau
Prüfen Sie den Inhalt Ihres Baukastens.
Dazu sind die Abb. 01+02 und die Stückliste hilfreich.
Die zum Bau Ihres RR Modells noch notwendigen Abbildungen sind mit RR+KIT gekennzeichnet. Die nur mit KIT
gekennzeichneten Abbildungen dienen zur Information falls
eine Reparatur aus Ersatzteilen notwendig wird.
2. Kabienenhabe öffnen und schließen
Zu Öffnen der Kabienenhaube diese im vorderen Bereich
anfassen und nach oben ziehen.
Zum Schließen den hinteren Zapfen einführen, die Haube
ganz in Richtung Rumpfende schieben und nach unten
einrasten.
Endmontage
3. Option Spornrad
Wer möchte, kann sein Modell auch mit einem Spornrad
ausrüsten. Dieses ist auch erforderlich, wenn später
Schwimmer angebaut werden sollen. Hier ist ein Wasserruder unbedingt notwendig und dieses braucht den installierten Spornraddraht. Die Abb. 09 -13 zeigen die notwendigen Bauschritte.
Eine Biegevorlage finden Sie auf der Abb.12+12a. Der
Stahldraht 47 hat einen Ø von 1,3 mm. Das notwendige
Röhrchen 35 liegt bei.
Montage:
Das Höhenleitwerk und den Rumpf nach Abb. 11 durch-
stechen. Bei Verwendung dieser Option wird der Hecksporn aus Schaum am Rumpf weggeschnitten. Im Seitenruder einen Schnitt für den Anlenkdraht einschneiden.
Abb.10
Das Rohr 35 mit CA Kleber einkleben und entsprechend
kürzen. Die obere, letzte Abwinklung vom Hecksporndraht
47 erst nach dem Durchstecken durch das Rohr 35 ausführen.
6. Höhen- und Seitenruder gängig machen
Die Scharnierkanten von Seiten- und Höhenruder durch
Hin- und Herbewegen „gängig“ machen - keinesfalls das
Ruder abtrennen! Abb. 25 + 27
7. Leitwerke mit dem Rumpf verkleben
Das Höhenleitwerk probehalber noch ohne Klebstoff auf
dem Rumpf positionieren und die Passgenauigkeit überprüfen. Achten Sie hier besonders darauf, dass das Höhenleitwerk 7 spaltfrei auf dem Rumpf aufliegt und parallel zur
Tragflächenauflage ist. Dazu die Tragfläche montieren. Von
der Rumpfnase her über die Tragfläche peilen und das
Höhenleitwerk ausrichten. Wenn sich das Leitwerk so ausrichten läßt, wird dieses mit dem Rumpf verklebt. Ausrichtung und Spaltfreiheit nochmals überprüfen!
Das Seitenleitwerk probehalber noch ohne Klebstoff auf
dem Rumpf und Höhenleitwerk positionieren und die Passgenauigkeit überprüfen. Achten Sie hier besonders darauf,
dass das Seitenleitwerk 8 spaltfrei aufliegt und 90° zur
Tragflächenauflage und Höhenleitwerk ist. Verwenden Sie
zur Überprüfung z.B. ein Geo-Dreieck.
Abb. 30
8. Höhen- und Seitenrudergestänge arretieren
Die Stahldrahtenden 41 und 42 durch die Gestängeanschlüsse 25 führen - Sevos und Ruder auf Neutral stellen
und mit den Inbus-Gewindestiften 28 festklemmen. Gestänge ggf. etwas abwinkeln.
Abb. 31-32
9. Fahrwerk montieren
Das bereits vormontierte Fahrwerk leicht zusammendrükken und in den Halter 74 einrasten. Schraube 75 eindre-
hen.
Abb. 34
4
Page 5
Option Querruder
Wenn Sie Zwei-Achs (Seite Höhe) fliegen wollen überspringen Sie Punkt 10-14 Abb.36-39 und kleben die
Servoschächte später mit dem vorgesehenen Dekor zu.
Das Modell fliegt mit der gleichen V-Form als Zwei und
Drei-Achser einwandfrei. Sie können auch später, zu jeder Zeit, auf Drei-Achser aufrüsten.
.........................................................
Wenn Sie mit Querruder fliegen wollen (Dreiachs),
geht es hier weiter.
10. Querruder gängig machen + Querruderservos
montieren
An der Tragfläche 6 die Querruder seitlich freischneiden.
Die Scharnierkanten durch Hin- und Herbewegen „gängig“
machen - keinesfalls die Ruder abtrennen!
Abb. 36
11. Querruderservos montieren
Stellen Sie die Servos mit der Fernsteuerung auf „Neutral“. Montieren Sie die Servohebel so auf den Servos, dass
die Hebel in Neutralstellung 90° seitlich überstehen 1x links und 1x rechts.
Die Servos in die Formnester der Tragflächen 6 einpassen. Dem verwendeten Servotyp entsprechend, können kleinere Anpassarbeiten notwendig werden. Zum Einkleben
jeweils einen Tropfen Heisskleber in die Schlitze für die
Servolaschen am Flügel angeben und das Servo sofort in
das Nest drücken - ggf. anschliessend nachkleben.
Abb. 37
16. Fernsteuerungseinbau
Im Kabinenbereich sind jetzt noch die fehlenden Fernsteuerkomponenten und der Antriebsakku einzubauen.
Achten Sie bereits bei der Positionierung auf die angegebene Schwerpunktvorgabe unter Abb. 43.
Es ist möglich viele unterschiedliche Akkutypen und Bauformen vorne im Rumpf unterzubringen. Falls der Schwerpunkt nicht durch positionieren erreicht werden kann, ist
auch eine Korrektur mit Ballast möglich.
Für die Befestigung der Bauteile liegt Klettband mit Haken- und Veloursseite 20+21 bei. Der Haftkleber des
Klettbands ist nicht immer ausreichend, daher das Band
im Rumpf zusätzlich mit Sekundenkleber festkleben.
Der Empfänger ist senkrecht hinter der Tragflächenverschraubung zu platzieren. Das Antennenkabel wird aus
dem Rumpf herausgeführt und wird mit Klebeband unter
dem Rumpf fixiert. Der Rest hängt als Schleppantenne
am Rumpfende.
Der beiliegende Antriebsmotor ist bereits intern vorentstört.
Diese Entstörung ist bei Verwendung des Reglers
MULTIcont X-16 # 7 2271 ausreichend.
Falls Sie andere Regler einsetzen, sollten Sie die MotorEntstörung sicherheitshalber erweitern. Dazu ist ein passender Entstörsatz # 8 5020 erhältlich. Löten Sie dazu je
einen Kondensator 47 nF vom Motoranschluss zum Motorgehäuse und einen Kondensator ebenfalls 47 nF über die
Motoranschlüsse.
12. Querruderservokabel verlegen
Das Servokabel in Richtung Tragflächenmitte verlegen ggf. verlängern. Das Kabel nun geradlinig und hochkant
stehend an der Vorderkante des Holmschachts festlegen.
Das Kabel muss an der Flügelwurzel ca. 120 mm überstehen, damit es bei der Montage des Modells in den Empfänger eingesteckt werden kann. Die Kabel in der Tragflächen Mitte mit einem Tropfen Heißkleber festlegen.
13. Ruderhörner am Querruder befestigen
In die beiden Ruderhörner für die Querruder die Gestängeanschlüsse 25 in die äusserste Bohrung der Ruderhörner
24 stecken. Mit den U-Scheiben 26 und den Muttern 27
befestigen. Achtung: 1x links und 1x rechts! Die Muttern
mit Gefühl anziehen und anschliessend mit einem Abstrich
(Nadel) Lack oder Sekundenkleber sichern. Den
Inbusgewindestift 28 mit dem Inbusschlüssel 29 im
Gestängeanschluss 25 vormontieren.Die Ruderhörner 24
- mit der Lochreihe zur Scharnierlinie zeigend - in das zuvor mit Aktivator benetzte Nest der Querruder einkleben.
Abb. 38
14. Querrudergestänge montieren
Stahldrähte 30 mit der Z-Biegung im innersten Loch des
Servohebels einhängen und durch den Gestängeanschluss
25 stecken. Ruder und Servo in Neutralstellung bringen
und mit dem Gewindestift 28 festklemmen.
Abb. 39
.........................................................
15. Die Tragfläche wird bei der Montage mit der Schraube
32 auf dem Rumpf befestigt Abb. 40
Propeller montieren
Vor dem ersten Probelauf muß noch der Propeller montiert werden. Es ist immer auf festen Sitz zu achten. Der
Spinner und die Luftschraube sind mit Kleber zu sichern
und auf die Achse des Motors aufzukleben. Diese ist zuvor mit Schleifpapier aufzurauhen. Beim Günther-Propeller benutzen Sie 5 Min.-Epoxykleber und beim MPX Propeller Sekundenkleber.
Nach der Verkabelung kann ein erster Probelauf durchgeführt werden, jedoch nicht bevor der Kleber ausgehärtet
ist.
Den Verbindungsstecker Akku / Regler für den Motor
erst einstecken, wenn Ihr Sender eingeschaltet ist
und Sie sicher sind, dass das Bedienelement für die
Motorsteuerung auf „AUS“ steht.
Schalten Sie den Sender ein und verbinden Sie im Modell
den Antriebsakku mit dem Regler und den Regler mit dem
Empfänger. Es ist notwendig, dass Ihr Regler eine sogenannte BEC-Schaltung besitzt (Empfängerstromversorgung
aus dem Flugakku).
Nun kurz den Motor einschalten und nochmals die Drehrichtung des Propeller kontrollieren (beim Probelauf Modell festhalten, lose, leichte Gegenstände vor und hinter
dem Modell entfernen).
Vorsicht: Auch bei kleinen Motoren und Luftschrauben besteht erhebliche Verletzungsgefahr!
5
Page 6
17. Ruderausschläge einstellen
Um eine ausgewogene Steuerfolgsamkeit des Modells zu
erzielen, ist die Größe der Ruderausschläge richtig einzustellen. Die Ausschläge werden jeweils an der tiefsten Stelle
der Ruder gemessen.
Höhenruder
nach oben - Knüppel gezogen - ca. +11 mm
nach unten - Knüppel gedrückt - ca. - 11 mm
Seitenruder
nach links und rechts je ca. 6 –10 mm
Querruder
nach oben ca. + 7 mm
nach unten ca. - 3 mm
Stellen Sie nun am Sender mittels Servoreverse die richtige Laufrichtung der Servos ein.
V-Kabel für die Querruderservos (Option)
# 8 5030
Das V-Kabel ermöglicht die Verwendung eines einfachen
4-Kanal Fernsteuersenders ohne Mischerfunktion.
Die Ansteuerung der beiden Querruderservos erfolgt über
einen Servoausgang am Empfänger mit Hilfe des V-Kabels.
Achtung: Die Differenzierung der Querruder muss dann
mechanisch erfolgen. Dazu sind die Servohebel um zwei
Zähne nach vorne zu versetzen. Dieses muß vor dem Einbau der Servos erfolgen. Das Seitenruder wird hier von
einem separaten Kanal gesteuert.
MagicMixer #1(Option) # 7 3000
Der MagicMixer #1 ermöglicht die Verwendung von einfachen Fernsteuersendern ohne Mischerfunktion. Ausreichend ist für:
MiniMag 3-Kanal Fernsteuersender
Ohne MagicMixer #1 wäre hier mindestens ein 4-Kanalsender Computersender mit Mischerfunktion notwendig.
Der MiniMag kann so auch mit einem Sender wie z.B.
Ranger III (aus dem EasyStar oder SpaceScooter RTF)
betrieben werden.
Dabei werden über einen Kanal (Ausgang rechts / links)
am Empfänger
angesteuert.
Die Servos und somit die Ruderausschläge werden mit
der richtigen Ausschlaggrösse angesteuert. Die Mitnahnme
von Seitenruder ins Querruder („Combi-Switch“) und die
Querruderdifferenzierung sind beim MagicMixer #1 fest eingestellt.
Querruderdifferenzierung bedeutet, dass hier der Querruderausschlag nach oben grösser ist als nach unten. Dies soll
das ungewollte wegdrehen des Modells um die Hochachse
verhindern.
Bei Verwendung des MagicMixer #1 sind somit mindestens folgende Senderkanäle erforderlich:
Kanal 1: Querruder, Mitnahme Seitenruder (3 Servos)
Kanal 2: Höhenruder (1 Servo)
Kanal 3: Motorsteuerung (1 Regler)
Schliessen Sie die Servokabel der Querruder wie in der
Anleitung „MagicMixer“ beschrieben an. Achten Sie hierbei auf die richtige Polung. Der Impuls-Kontaktstift ist auf
dem Etikett des MagicMixer mit dem Impulssymbol gekennzeichnet. Die Anschlussleitungen des Impulssignals
sind i.d.R. gelb oder orange.
Anschlussbelegung MagicMixer #1:
r / l = zum Empfänger an den Ausgang rechts/links
AR = zum Querruderservo rechts
AL = zum Querruderservo links
R = zum Seitenruderservo
zwei Querruderservos und das Seitenruder
Computerfernsteuersender
Wenn sie diesen Sendertyp verwenden ist kein MagicMixer
#1 und kein V-Kabel notwendig!
Der Sender muss dann folgende Einstellmöglichkeiten haben:
- Querruderdifferenzierung
- Servoreverse (Umkehrung des Servoweges)
- Servowergeinstellung
- ggf. Combi-Switch (Kopplung von Seitenruder / Querruder)
Hinweis: Bei Querruder rechts bewegt sich das rechte Querruder in Flugrichtung gesehen nach oben.
Falls Ihre Fernsteuerung die oben angegebenen
Wege nicht zulässt, müssen Sie ggf. den
Gestängeanschluss umsetzen.
18. Noch etwas für die Schönheit
Dazu liegt dem Bausatz ein mehrfarbiger Dekorbogen bei.
Die einzelnen Schriftzüge und Embleme werden ausgeschnitten und nach unserer Vorlage (Baukastenbild) oder
nach eigenen Vorstellungen aufgebracht. Für die Zwei-Kanal Anwender gibt es auf dem Dekorbogen Aufkleber die
die Servonester am Flügel verschließen.
19. Auswiegen des Schwerpunkts
Um stabile Flugeigenschaften zu erzielen, muss Ihr
MiniMag wie jedes andere Flugzeug auch, an einer bestimmten Stelle im Gleichgewicht sein. Montieren Sie Ihr
Modell flugfertig und setzen den Antriebsakku ein.
Der Schwerpunkt wird mit 67mm von der Vorderkante
des Tragflügels am Rumpf gemessen und auf der Flügelunterseite eingestellt - hier befinden sich auch entsprechende Markierungen.
Hier mit den Fingern unterstützt, soll das Modell waagerecht auspendeln. Durch Verschieben des Antriebs- bzw.
Empfängerakkus sind Korrekturen möglich. Ist die richtige Position gefunden, stellen Sie durch eine Markierung
im Rumpf sicher, dass der Akku immer an derselben Stelle positioniert wird. Falls Sie den Schwerpunkt nicht durch
positionieren erreichen können, ist auch eine Korrektur
mit Ballast möglich.
Abb. 43
6
Page 7
20. Vorbereitungen für den Erstflug
Für den Erstflug warten Sie einen möglichst windstillen
Tag ab. Besonders günstig sind oft die Abendstunden.
Vor dem ersten Flug unbedingt einen Reichweitentest durchführen!
Sender- und Flugakku sind frisch und vorschriftsmäßig
geladen.
dass der verwendete Kanal frei ist.
Ein Helfer entfernt sich mit dem Sender; die Antenne ist
dabei ganz eingeschoben.
Beim Entfernen eine Steuerfunktion betätigen. Beobachten Sie die Servos. Das nicht gesteuerte soll bis zu einer
Entfernung von ca. 60 m ruhig stehen und das gesteuerte
muss den Steuerbewegungen verzögerungsfrei folgen. Dieser Test kann nur durchgeführt werden, wenn das Funkband ungestört ist und keine weiteren Fernsteuersender,
auch nicht auf anderen Kanälen, in Betrieb sind! Der Test
muss mit laufendem Motor wiederholt werden. Dabei darf
sich die Reichweite nur unwesentlich verkürzen.
Falls etwas unklar ist, sollte auf keinen Fall ein Start erfolgen. Geben Sie die gesamte Anlage (mit Akku, Schalterkabel, Servos) in die Serviceabteilung des Geräteherstellers
zur Überprüfung.
Machen Sie keine Startversuche mit stehendem Motor!
Das Modell wird aus der Hand gestartet (immer gegen
den Wind).
Beim Erstflug lassen Sie sich besser von einem geübten Helfer unterstützen.
Nach Erreichen der Sicherheitshöhe die Ruder über die
Trimmung am Sender so einstellen, dass das Modell geradeaus fliegt.
Machen Sie sich in ausreichender Höhe vertraut, wie das
Modell reagiert, wenn der Motor ausgeschaltet wird. Si-
Vor dem Einschalten des Senders sicherstellen,
Erstflug ...
mulieren Sie Landeanflüge in größerer Höhe, so sind Sie
vorbereitet, wenn der Antriebsakku leer wird.
Versuchen Sie in der Anfangsphase, insbesondere bei der
Landung, keine „Gewaltkurven“ dicht über dem Boden. Landen Sie sicher und nehmen besser ein paar Schritte in
Kauf, als mit Ihrem Modell bei der Landung einen Bruch
zu riskieren.
21. Sicherheit
Sicherheit ist oberstes Gebot beim Fliegen mit Flugmodellen. Eine Haftpflichtversicherung ist obligatorisch.
Falls Sie in einen Verein oder Verband eintreten, können
Sie diese Versicherung dort abschließen. Achten Sie auf
ausreichenden Versicherungsschutz (Modellflugzeug mit
Antrieb).
Halten Sie Modelle und Fernsteuerung immer absolut in
Ordnung. Informieren Sie sich über die Ladetechnik für die
von Ihnen verwendeten Akkus. Benutzen Sie alle sinnvollen Sicherheitseinrichtungen, die angeboten werden. Informieren Sie sich in unserem Hauptkatalog; MULTIPLEXProdukte sind von erfahrenen Modellfliegern aus der Praxis für die Praxis gemacht.
Fliegen Sie verantwortungsbewusst! Anderen Leuten dicht
über die Köpfe zu fliegen ist kein Zeichen für wirkliches
Können, der wirkliche Könner hat dies nicht nötig. Weisen Sie auch andere Piloten in unser aller Interesse auf
diese Tatsache hin. Fliegen Sie immer so, dass weder
Sie noch andere in Gefahr kommen. Denken Sie immer
daran, dass auch die allerbeste Fernsteuerung jederzeit
durch äußere Einflüsse gestört werden kann. Auch langjährige, unfallfreie Flugpraxis ist keine Garantie für die
nächste Flugminute.
Wir, das MULTIPLEX -Team, wünschen Ihnen beim Bauen
und später beim Fliegen viel Freude und Erfolg.
MULTIPLEX Modellsport GmbH &Co. KG
Produktbetreuung und Entwicklung
Klaus Michler
7
Page 8
Stückliste BK MiniMag RR # 26 4211
Lfd. Stück Bezeichnung Material Abmessungen
1 1 Bauanleitung RR Papier DIN-A4
2 1 Dekorbogen bedruckte Klebefolie 400 x 700mm
3 1 Rumpf mit Kabinenhaube fertig gebaut
2x Servos und Motor u. Regler eingbaut Elapor geschäumt Fertigteil
6 1 Tragflächen fertig für 2 Achs. gebaut Elapor geschäumt Fertigteil
7 1 Höhenleitwerk mit Ruderhorn und
montiertem Gestängeanschluß Elapor geschäumt Fertigteil
8 1 Seitenleitwerk mit Ruderhorn und
montiertem Gestängeanschluß Elapor geschäumt Fertigteil
Kleinteilesatz
20 2 Klettband Pilzkopf Kunststoff 25 x 60 mm
21 2 Klettband Velours Kunststoff 25 x 60 mm
24 2 Einkleberuderhorn Kunststoff gespritzt Fertigteil
25 2 Gestängeanschluß Metall Fertigteil Ø6mm
26 2 U-Scheibe Metall M2
27 2 Mutter Metall M2
28 2 Inbus-Gewindestift Metall M3 x 3mm
29 1 Inbusschlüssel Metall SW 1,5
30 2 Querrudergestänge mit Z-Biegung Metall Ø1 x 70mm
32 1 Schraube Kunststoff M5 x 50mm
35 1 Bowdenzugrohr Kunststoff 3 x 2 x 90 mm
47 1 Stahldraht Metall 1,3 x 250 mm
52 1 Luftschraube Kunststoff 5,0 x 4,0“
75 1 Schraube Metall M3 x 12mm
Fahrwerk
70 1 Hauptfahrwerk mit 2 Rädern Ø 53mm Metall / Kunststoff Fertigteil
CD-Anleitung / Flim
80 1 CD-Anleitung / Film Fertigteil
A B
Auftriebskraft
X
D
C
α
E
F
8
Page 9
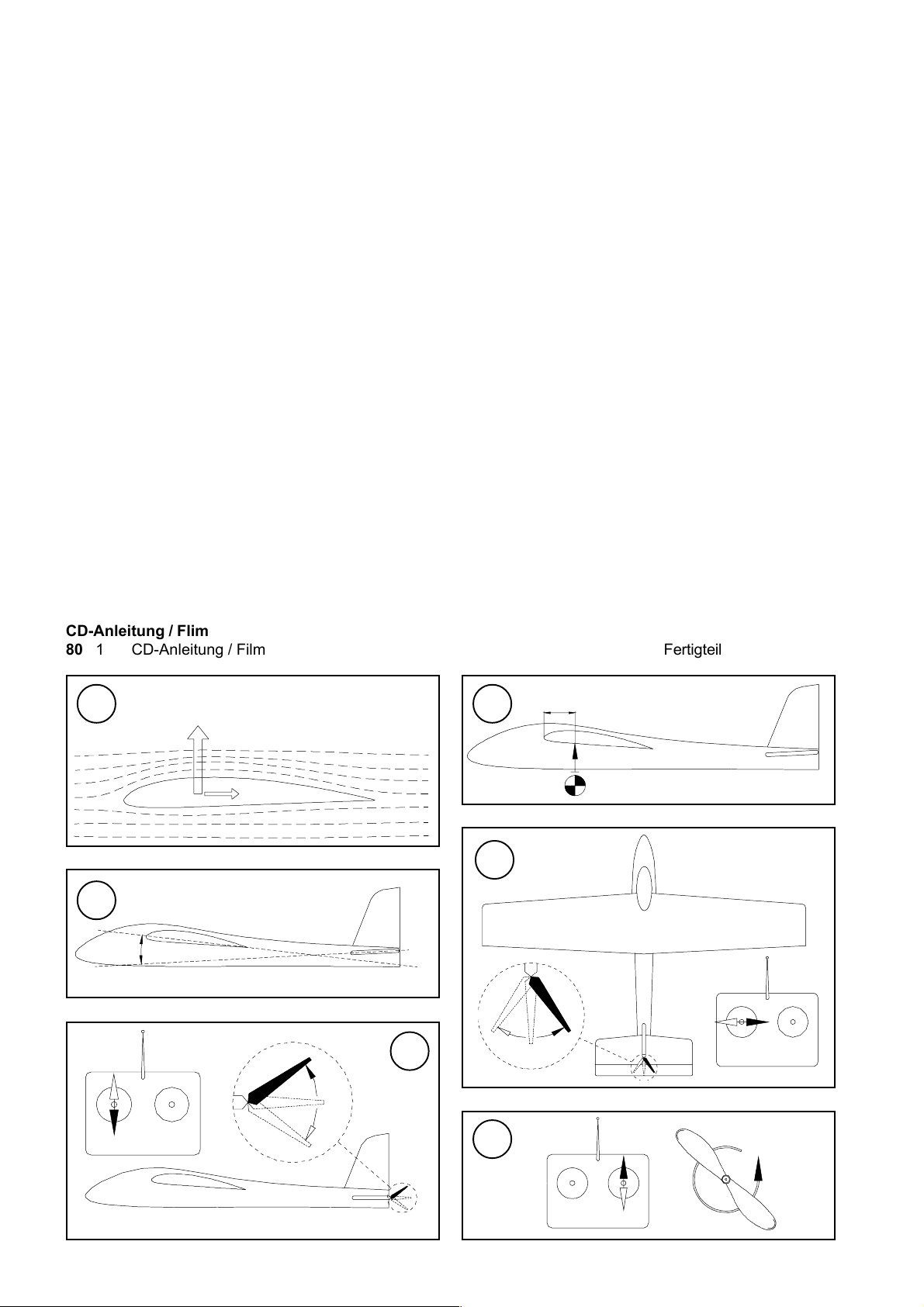
Grundlagen am Beispiel eines Flugmodells
Ein Flugzeug bzw. Flugmodell läßt sich mit den Rudern um folgende 3-Achsen steuern - Hochachse, Querachse und Längsachse.
Die Betätigung des Höhenruders ergibt eine Veränderung der Fluglage um die Querachse. Bei Seitenruderausschlag dreht
das Modell um die Hochachse. Wird Querruder gesteuert, so rollt das Modell um die Längsachse. Da unser EasyStar VStellung im Tragflügel hat, kann hier auf Querruder verzichtet werden. In diesem Fall wird das Modell mit dem Seitenruder um
die Hochachse
Modell aus der Flugbahn bringen, muß der Pilot das Modell so steuern, dass es dort hinfliegt, wo er es haben will. Mit Hilfe
des Antriebs (Motor und Luftschraube) wird die Flughöhe gewählt. Die Drehzahl des Motors wird dabei meist von einem
Regler stufenlos verstellt. Wichtig ist, dass alleiniges Ziehen am Höhenruder das Modell nur solange steigen lässt, bis die
Mindestfluggeschwindigkeit erreicht ist. Je nach Stärke des Antriebs sind somit unterschiedliche Steigwinkel möglich.
und um die Längsachse gesteuert werden. Je nach äusseren Einflüssen wie z.B. Turbulenzen, die das
Tragfläche
(rechts)
Hochachse
Kabinenhaube
Längsachse
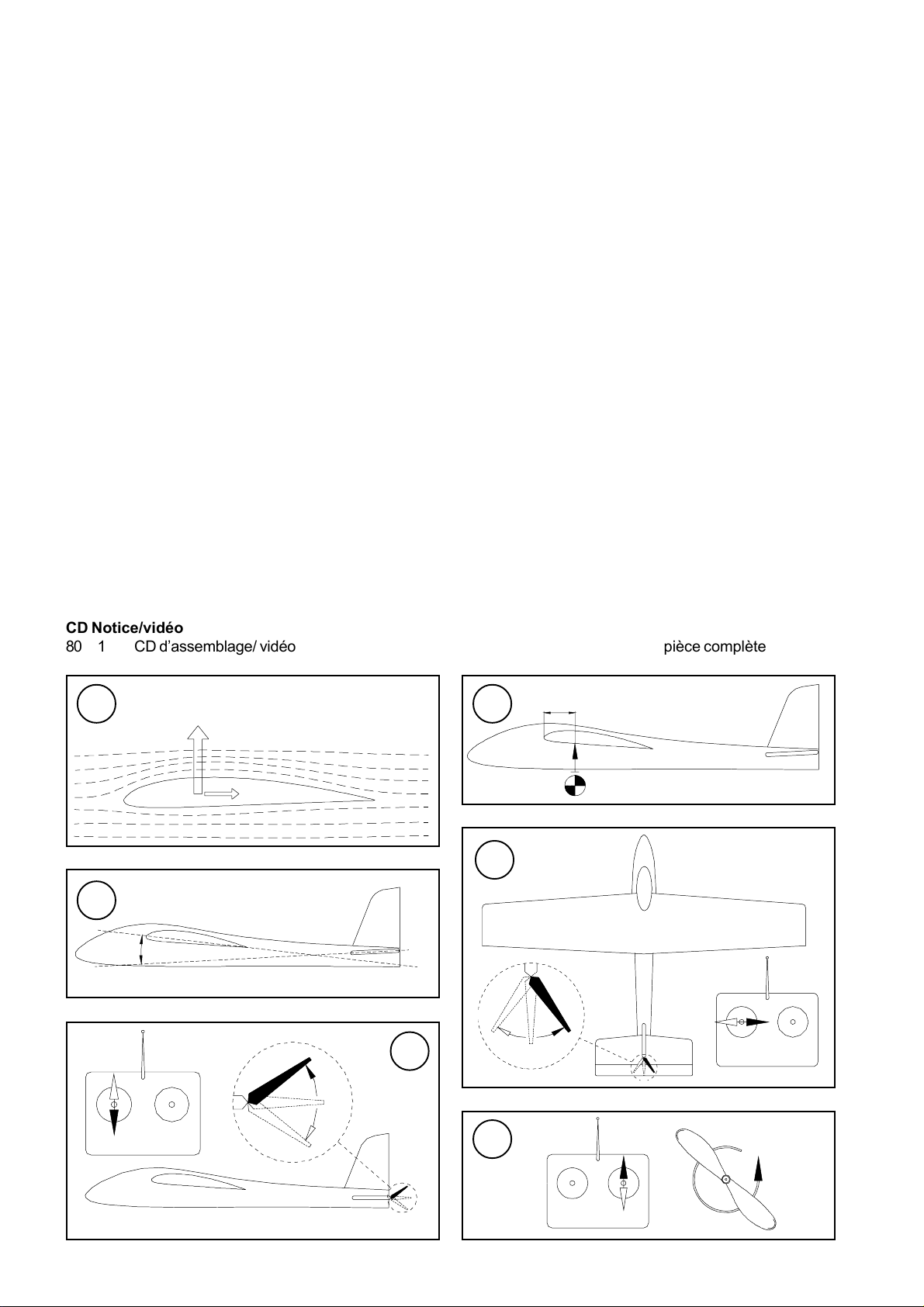
Das Tragflügelprofil
Die Tragfläche hat ein gewölbtes Profil an der die Luft im
Flug vorbeiströmt. Die Luft oberhalb der Tragfläche legt gegenüber der Luft auf der Unterseite in gleicher Zeit eine größere Wegstrecke zurück. Dadurch entsteht auf der Oberseite
der Tragfläche ein Unterdruck mit einer Kraft nach oben (Auftrieb) die das Flugzeug in der Luft hält. Abb. A
Der Schwerpunkt
Um stabile Flugeigenschaften zu erzielen muss Ihr Flugmodell wie jedes andere Flugzeug auch, an einer bestimmten
Stelle im Gleichgewicht sein. Vor dem Erstflug ist das Einstellen des richtigen Schwerpunkts unbedingt erforderlich.
Das Maß wird von der Tragflächenvorderkante ( in Rumpfnähe) angegeben. An dieser Stelle mit den Fingern oder
besser mit der Schwerpunktwaage MPX # 69 3054 unterstützt
soll das Modell waagerecht auspendeln.Abb. B
Wenn der Schwerpunkt noch nicht an der richtigen Stelle liegt
wird dieser durch Verschieben der Einbaukomponenten (z.B.
Antriebsakku) erreicht. Falls dies nicht ausreicht wird die
richtige Menge Trimmgewicht (Blei oder Knetgummi) an der
Rumpfspitze oder am Rumpfende befestigt und gesichert. Ist
das Modell schwanzlastig, so wird Trimmgewicht in der Rumpfspitze befestigt - ist das Modell kopflastig so wird Trimmgewicht am Rumpfende befestigt.
Die EWD (
grad an, mit dem das Höhenleitwerk zur Tragfläche eingestellt
ist. Durch gewissenhaftes, spaltfreies montieren der Tragfläche und des Höhenleitwerks am Rumpf wird die EWD exakt
eingehalten.
Einstellwinkeldifferenz) gibt die Differenz in Winkel-
Seitenleit-
Höhenleitwerk
werk
Seitenruder
Höhenruder
Tragfläche
(links)
Querachse
Rumpf
D
Wenn nun beide Einstellungen (Schwerpunkt und EWD) stimmen, wird es beim Fliegen und insbesondere beim Einfliegen
keine Probleme geben. Abb. C
Ruder und die Ruderausschläge
Sichere und präzise Flugeigenschaften des Modells können
nur erreicht werden, wenn die Ruder leichtgängig, sinngemäß richtig und von der Ausschlaggröße angemessen eingestellt sind. Die in der Bauanleitung angegebenen Ruderausschläge wurden bei der Erprobung ermittelt und wir empfehlen die Einstellung zuerst so zu übernehmen. Anpassungen an Ihre Steuergewohnheiten sind später immer noch
möglich.
Steuerfunktionen am Sender
Am Fernsteuersender gibt es zwei Steuerknüppel, die bei
Betätigung die Servos und somit die Ruder am Modell bewegen.
Die Zuordnung der Funktionen sind nach Mode A angegeben
- es sind auch andere Zuordnungen möglich.
Folgende Ruder sind mit dem Sender bedienen.
Das Seitenruder (links / rechts) Abb. D
Das Höhenruder (hoch / tief) Abb. E
Die Motordrossel (Motor aus / ein) Abb. F
Der Knüppel der Motordrossel darf nicht selbsttätig in Neutrallage zurückstellen Er ist über den gesamten Knüppelweg
rastbar. Wie die Einstellung fünktioniert lesen Sie bitte in der
Bedienungsanleitung der Fernsteuerung nach.
9
Page 10
Regler MULTIcont X-16 # 7 2271
A
X
Diese Anleitung ist Bestandteil des Produktes. Sie
beinhaltet wichtige Informationen und Sicherheitshinweise. Sie ist deshalb jederzeit griffbereit aufzubewahren
3. Motordrehrichtung kontrollieren
und beim Verkauf des Produktes an Dritte weiterzugeben.
ECHNISCHE DATEN
1. T
MULTIcont X-16
Zellenzahl/NiCd/NiMH
6-8 / 2-Zellen
Lipoly
5. I
1. Anschließen des Anschlusskabels des Reglers (REC)
Dauerstrom 16 A
Taktfrequenz ~ 6 kHz
Empfängerstromversorgung (BEC):
BEC-Spannung 5 V
BEC-Strom max. 1 A
Verlustleistung des BEC-Reglers max. 2,5 W
Abmessungen (o.Kabel) 27x20x8 mm
Gewicht mit Kabel 17g
ICHERHEITSHINWEISE
2. S
• Vor Inbetriebnahme Anleitung lesen
• Wärmestau vermeiden: Luftzirkulation nicht behindern.
• Antriebsakku nicht verpolt anschließen:
Falsch gepolte Akkuanschlüsse zerstören den Regler
sofort.
Deshalb: • rotes Kabel an den PLUS-Pol (+),
2. Bei programmierbaren Fernsteuerungen den Servoweg
3. Gasknüppel (und Trimmung
4. Sender einschalten
5. Antriebsakku am Regler anschließen
Blinkt jetzt die LED befindet sich der Regler im
Einschaltschutz Æ Antriebsakku vom Regler trennen,
Gaskanal am Sender umpolen (Servo-Revers) und
Antriebsakku erneut anschließen Æ Bereit.
• Wichtig:
• Zuerst Sender EIN, dann Antriebsakku anschließen
• schwarzes Kabel an den MINUS-Pol (-)
Wir empfehlen die Verwendung der 6 poligen MPX-
Steckverbindung # 85213/85214 zur Verbindung von
• Zuerst Antriebsakku vom Regler trennen, dann
Regler/Akku und Motor/Regler, sofern der Motor nicht direkt
angelötet werden soll.
• Bei Löt- und Montagearbeiten an Antrieb oder Regler:
Immer den Akku abtrennen
(Kurzschluß/Verletzungsgefahr)
• Beim Probebetrieb bzw. Betrieb beachten:
Antrieb nicht in der Hand laufen lassen, Modell sicher
befestigen. Prüfen, ob ausreichend Platz zum Drehen der
Luftschraube vorhanden ist. Gegenstände, die angesaugt
oder weggeblasen werden können (Kleidungsstücke,
Kleinteile, Papier, usw.) aus der Nähe der Luftschraube
entfernen. Sich niemals vor oder in der Rotationsebene der
Luftschraube aufhalten (Verletzungsgefahr).
ESONDERE EIGENSCHAFTEN
3. B
• BEC mit Unterspannungsabschaltung (empf. bis max.
8Zellen) mit automatischer Zellenzahl-Anpassung.
• Einschaltschutz: Wenn Sie den Antriebsakku anschließen,
bleibt der Regler im Einschaltschutz. Der Antrieb lässt sich
erst einschalten, wenn der Steuerknüppel nach dem
Anschließen des Akkus kurz in die Leerlauf-Position
gebracht wird. Andernfalls blinkt die LED.
• Überlast-Schutz Bei Überhitzung und Überlastung schaltet
der Regler die Motorversorgung ab. Zur Reaktivierung muß
der Akku abgezogen und wieder angeschlossen werden.
• Überspannungs-Schutz
Bei Spannungen >16 V schaltet der Regler ab.
ONTAGE AM ANTRIEB
4. M
Hinweis: Zur Montage des Reglers sind ggf. Lötarbeiten
erforderlich. Lötarbeiten erfordern ein Mindestmaß an Sorgfalt,
da hiervon die Betriebs-sicherheit maßgeblich abhängt:
• nur für Elektronik-Lötarbeiten geeignetes Lötzinn verwenden
• kein säurehaltiges Lötfett verwenden
• Teile nicht übermäßig aber ausreichend erwärmen
• gegebenfalls jemand mit Löt-Erfahrung hinzuziehen
1. Motorentstörung:. Sollte der zu verwendende Motor
-16# 72271
werkseitig noch nicht entstört sein, ist die Verwendung des
Entstörsatzes # 85020 unbedingt zu empfehlen, um
6. BEC = B
BEC heißt: Empfänger und Servos werden aus dem
Antriebsakku mit Strom versorgt. Keinen zusätzlichen
Empfängerakku verwenden.
• Hinweis: Beachten Sie, dass die BEC-Versorgung des
MULTIcont X-16 nur 1A Strom für die Empfangsanlage im
Modell abgeben kann. Für die Praxis bedeutet das: Bei 7
Zellen max. 3 Servos, bei 8 Zellen max 2 Servos, über 8
Zellen keine BEC-Versorgung verwenden.
Die Stromaufnahme hängt von der Leistungsklasse der
Servos, der Steuerintensität und von der Leichtgängigkeit
der Ruderanlenkungen(!) ab. Wenn keine Möglichkeit
besteht, den BEC-Strom zu messen: Testlauf am Boden
durchführen, Servos bis zur Unterspannungsabschaltung (=
leerer Antriebsakku) permanent steuern. Der Regler darf
nicht übermäßig warm werden, das Steuern der Servos muß
während der gesamten Laufzeit ohne Ausfallerscheinungen
möglich sein!
Wenn im Modell mehr Servos vorhanden sind, muß die
BEC-Versorgung unterbrochen und ein zusätzlicher
Empfängerakku verwendet werden.
Dazu muß am Empfängeranschlußkabel des Reglers die
rote Leitung (+)
7. U
Die Unterspannungsabschaltung des MULTIcont X-16 sorgt
dafür, daß der Antrieb abgeschaltet wird, wenn der
Antriebsakku leer wird. Dadurch wird gewährleistet, daß
noch genügend Energie für die BEC-Versorgung für eine
sichere Landung zur Verfügung steht. Sinkende Drehzahl ist
ein Anzeichen dafür, daß der Akku leer wird. Die Landung
sollte eingeleitet werden. Bei Erreichen von 65% der
Leerlaufspannung schaltet der Regler den Antrieb ab.
Danach kann der Antrieb jedoch wieder für kurze Zeit
eingeschaltet werden, wenn zuvor der Gasknüppel für einen
Moment in die Leerlauf/Motor-AUS-Stellung gebracht wurde.
Störungen der RC-Anlage zu vermeiden.
2. Motoranschlusskabel des Reglers am Motor anlöten
nlMULTICont
Das Motoranschlusskabel ist durch „MOTOR“ auf dem
MULTIPLEX Modellsport GmbH & Co. KG • Neuer Weg 2 • D-75223 Niefern • www.multiplex-rc.de
Regler gekennzeichnet- am Antriebsmotor anlöten:
In der Regel bei Direktantrieben: gelb Æ „+“ ; blau Æ „-“
Sollte die Drehrichtung nicht stimmen (z.B. bei Getriebeantrieben), wird dies durch vertauschtes Anlöten der
Motor-Anschlusskabel am Motor korrigiert.
NBETRIEBNAHME
am Empfänger.
Bei MPX-Fernsteuerungen an Kanal 4 = Gas/Motor
für Gas/Motor beidseitig auf 100 % einstellen.
) vollständig in
gewünschte Leerlaufstellung/Motor AUS bringen
Achtung: Falschpolung zerstört den Regler sofort!
Blinkt die LED, ist der Einschaltschutz aktiv Æ
Gasknüppel in Leerlauf bringen Æ Regler betriebsbereit!
Sender AUS
ATTERY ELIMINATING CIRCUIT
durchtrennt werden.
NTERSPANNUNGSABSCHALTUNG
Page 11

RR # 26 4211
Familiarisez-vous avec le kit d’assemblage!
Les kits d’assemblages MULTIPLEX sont soumis pendant la production à des contrôles réguliers du matériel. Nous
espérons que le contenu du kit répond à vos espérances. Nous vous prions de vérifier le contenu (suivant la liste des
pièces) du kit avant l’assemblage, car les pièces utilisées ne sont pas échangées. Dans le cas où une pièce ne
serait pas conforme, nous sommes disposé à la rectifier ou à l’échanger après contrôle. Veuillez retourner la pièce à
notre unité de production sans omettre de joindre le coupon de caisse ainsi qu’une petite description du défaut.
Nous essayons toujours de faire progresser technologiquement nos modèles. Nous nous réservons le droit de modifications
de la forme, dimensions, technologie, matériel et contenu sans préavis. De ce fait, nous ne prenons donc pas en compte
toutes réclamations au sujet des images ou de données ne correspondants pas au contenu du manuel.
Attention!
Les modèles radiocommandés, surtout volants, ne sont pas des jouets au sens propre du terme. Leur
assemblage et utilisation demande des connaissances technologiques, un minimum de dextérité manuelle,
de rigueur, de discipline et de respect de la sécurité. Les erreurs et négligences, lors de la construction ou de
l’utilisation, peuvent conduire à des dégâts corporels ou matériels. Du fait que le producteur du kit n’a plus
aucune influence sur l’assemblage, la réparation et l’utilisation correcte, nous déclinons toute responsabilité
concernant ces dangers.
Compléments nécessaires au modèle Mini Mag RR:
Colle et activateur correspondant
Utilisez de la colle rapide ‘’légèrement épaissie’’ (Colle Cyanoacrylate) en combinaison avec l’activateur correspondant
–
n’utilisez pas de colle rapide pour polystyrène ! Les colles Epoxy ne donnent qu’un joint de tenue moyenne, car celuici casse lorsqu’il subit des charges un peu plus importantes et les pièces ne tiennent plus. Le joint n’est que superficiel.
Vous pouvez utiliser de la colle à chaud comme alternatif !
F
Eléments de radiocommande pour Mini Mag
Par ex. : Récepteur PiCO 5/6 UNI 35 MHz A Nr. Com. 5 5920
alternative 40 MHz Nr. Com. 5 5921
ou Récepteur Micro IPD UNI 35 MHz A Nr. Com. 5 5971
alternative 40 MHz Nr. Com. 5 5972
en option
Servo NanoS UNI ou HS 55(besoin 2x) ailerons Nr. Com.7 3000
Câble de rallonge 300mm UNI 2x pour servo d’aileron Nr. Com.8 5031
Si besoin câble de filtrage 200mm UNI 2x pour servo d’aileron Nr. Com.8 5035
en option
MagicMixer UNI pour émetteur 3 canaux sans mélangeur Nr. Com.6 5120
Câble en V (UNI) pour émetteur 4 canaux avec commande direction séparée Nr. Com.8 5030
Accu de propulsion :
Par ex. Accu de propulsion MULTIPLEX Permabatt NiMH (Mignon AA) 7/1500 mAh Nr. Com.15 6030
ou Accu de propulsion MULTIPLEX Permabatt NiMH (Mignon AA) 8/1500 mAh Nr. Com.15 6037
ou Accu de propulsion MULTIPLEX Li-Batt (LiPo) P-CS 2/ 1-2000 mAh Nr. Com.15 7016
ou Accu de propulsion MULTIPLEX Li-Batt (LiPo) SH BX 2/ 1-2100 mAh Nr. Com.15 7130
Chargeur :
MULTIcharger LN-5014DC (courant de charge de 100mA à 5A) 1-14 éléments NiCd/NiMH Nr. Com. 9 2531
Et 1-5 éléments Lithium Polymère
Option : Kit de flotteurs Nr. Com.73 3069
Tuning 1 :kit de propulsion Easy Glider (réducteur 3 :1 avec Permax 400) Nr. Com.33 2688
Avec entraîneur Ø 3,5 Nr. Com.33 2310
Et hélice 8x3,8’’ Nr. Com.73 3139
Tuning 2 :kit de propulsion ‘’Sport’’ BL-X 22-18
Contenu : moteur, entraîneur, régulateur et hélice Nr. Com. 33 2627
Outils :
Ciseaux, cutter, pince coupante, petit tournevis plat et cruciforme pour la fixation de palonniers et moteur, et, si nécessaire,
un fer à souder
Remarque : détachez les deux pages du milieu des instructions de montage.
11
Page 12
Données techniques :
Envergure 1010 mm
Longueur 820 mm
Poids en vol à partir de 580g
Charge alaire (FAI) à partir de 26 g/dm²
Propulsion à partir de Permax 400 6V
Fonctions RC Profondeur, direction, et moteur
Ailerons en option
Information importante
Ce modèle n’est pas en polystyrène™!De ce fait,
n’utilisez pas de colle blanche ou époxy. N’utilisez
que des colles cyanoacrylate, de préférence avec
ajout d’activateur (Kicker). Pour tous les joints de colle,
utilisez une colle cyanoacrylate (colle rapide) avec
une viscosité moyenne. Pour les pièces en Elapor®,
vaporisez toujours l’activateur (Kicker) sur une des
pièces à coller, laissez aérer pendant 2 minutes, et
enduisez l’autre pièce avec de la colle cyanoacrylate.
Assemblez les pièces et amenez-les de suite en bonne
position.
Faite très attention lorsque vous travaillez avec de la
colle cyanoacrylate. Cette colle durcie en quelques
secondes, et de ce fait il ne faut pas s’en mettre sur les
doigts ou une autre partie de notre corps. Il est vital de
porter des lunettes de protections pour protéger vos
yeux. A mettre hors de portée des enfants !
Collez le tube 35 avec de la colle cyanoacrylate et ajustez
la longueur. Ne réalisez la dernière courbure de la tige de
la roulette de queue 47 que lorsque vous avez passez
l’ensemble dans le tube 35.
Encore une option
Pour l’utilisation du modèle en hydravion, il est nécessaire
de réaliser un gouvernail en Depron de 3mm. Cette pièce
est collée avec du ruban adhésif (par ex. : Tesa) entre les
tiges métalliques. La fixation se fait avec deux cylindres
de blocages sur la tige de roulette de queue. Ces pièces
ne sont pas comprises dans le kit de flotteurs.
4. Montage du moteur
La propulsion standard, Permax 400, est déjà assemblée.
Néanmoins vous pouvez choisir les options Tuning. Nous
vous proposons deux possibilités.
A. Propulsion standard G Permax 400 avec réducteur 3 :1.
Fig. 20
Kit de propulsion du modèle Easy Glider E
(Permax 400 avec réducteur 3 :1) #33 2688
avec entraîneur d’hélice Ø 3,5mm #33 2310
et hélice 8x3,8’’ #73 3139
B. Kit de propulsion ‘’Sport’’ BL-X 22-18 #33 2627
Le variateur, l’entraîneur d’hélice et l’hélice sont compris
dans le kit
1. Avant l’assemblage final du modèle
Vérifiez le contenu de la boite.
Pour cela, vous pouvez vous aider de la Fig.01-02 et de la
liste des pièces. Les figures référencées RR+Kit sont
nécessaires pour l’assemblage de votre modèle. Celles qui
sont uniquement notées Kit vous sont données pour
informations et vont uniquement vous servir pour effectuer
les réparations avec des pièces de rechanges.
2. Ouverture et fermeture de la cabine
Pour ouvrir la cabine, maintenez la partie avant de celle-ci
et tirez vers le haut.
Pour fermer, engagez le téton arrière dans le fuselage et
appuyez l’avant vers le bas pour clipser l’ensemble.
Montage final
3. Option roulette de queue
Si vous le souhaitez, vous pouvez également équiper votre
modèle d’une roulette de queue. Cela est d’ailleurs
nécessaire si vous souhaitez équiper par la suite votre
modèle de flotteurs. A ce moment la, il est nécessaire
d’installer un gouvernail trempant dans l’eau qui ce fixe sur
la tringle de la roulette de queue. La fig. 09-13 vous illustre
les différentes étapes d’assemblages.
Vous trouverez des directives pour le pliage de la tige d’acier
sur les fig. 12-12a. La tige d’acier 47 a un Ø de 1,3mm. Le
tube associé 35 est fourni dans le kit.
Assemblage :
Percez le fuselage et la profondeur comme indiqué sur la
fig. 11. Si vous utilisez cette option il est préalablement
nécessaire d’éliminer la cale en mousse sous l’arrière du
fuselage. Réalisez une encoche dans la dérive pour pouvoir
y fixer la tringle de commande. Fig. 10
5. Branchement du moteur
Effectuez un test de fonctionnement ! En regardant par
l’avant, l’axe du moteur/l’hélice doit toujours tourner dans
le sens contraire des aiguilles d’une montre. Si nécessaire,
modifiez la polarité du moteur.
6. Libérez la gouverne de profondeur et de dérive
‘’Rodez’’ les axes de fixations des gouvernes de profondeur
et de direction faisant office de charnières en les bougeant
dans un sens puis dans l’autre – n’enlevez en aucun cas
les gouvernes des stabilisateurs! Fig. 25+27
7. Collez les stabilisateurs au fuselage
Effectuez un test d’assemblage en mettant la profondeur
et la dérive en place sur le fuselage, sans colle. Veillez
surtout à ce que la profondeur 7 repose uniformément sur
le fuselage et soit bien parallèle au plan du support d’aile.
Pour cela, montez l’aile. Visez à partir du nez de l’appareil
en passant par les ailes afin de pouvoir bien positionner la
profondeur. Si vous arrivez à positionner la profondeur de
cette manière, vous pouvez la coller. Vérifiez à nouveau
que la profondeur repose partout sur le fuselage !
Effectuez un test de placement de la dérive sur le fuselage
et la profondeur, sans colle, placez la correctement et
vérifiez les jointures avec les autres éléments. Veillez à ce
la dérive 8 repose strictement partout sans laisser de jour
et fasse un angle de 90° avec l’aile et la profondeur. Pour
cela nous vous conseillons d’utiliser une équerre.
Fig. 30
8. Montage des tringles de commandes profondeur
et direction
Passez les tringles de commandes 41 et 42 dans la pièces
de fixation 25 – amenez les servo et les gouvernes dans
12
Page 13
leur position de neutre et serrez la vis de blocage Inbus 28.
Si nécessaire, tordez un peu la tringle
Fig. 31-32
9. Montage du train d’atterrissage
Comprimez un peu le train d’atterrissage pré assemblé et
clipsez le dans le support 74. Montez vis 75.
Fig. 34
Options ailerons
Si vous souhaitez piloter votre modèle en deux axes
(profondeur/direction), passez les étapes 10-14 Abb.36-
39 et couvrez les compartiments des servos à la fin avec
les décorations.
Le modèle vol aussi bien avec la même forme en V pour
l’option deux ou trois axes. Vous pouvez à tout moment
équiper votre modèle en trois axes.
……………………………………
Si vous souhaitez voler avec des ailerons (trois axes) veillez
poursuivre à cet endroit.
10. Libérez les ailerons et montez leurs servos
Coupez la fixation des ailerons de chaque côté sur l’aile 6.
‘’Rodez’’ les axes des ailerons en les bougeant dans un
sens puis dans l’autre – n’enlevez en aucun cas les
gouvernes!
Fig. 36
11. Assemblez les servos des ailerons
A l’aide de la radiocommande, positionnez les servos dans
leur position de ‘’neutre’’. Placez les palonniers sur les
servos de telle manière qu’ils forment un angle de 90° par
rapport à l’axe du servo – 1x à gauche et 1x à droite.
Placez les servos dans les compartiments respectifs déjà
réalisés dans l’aile 6. En fonction du type de servo utilisé,
il est peut-être nécessaire d’effectuer quelques
ajustements. Pour la fixation, appliquez une goûte de colle
à chaud dans les fentes de l’aile pour les pattes de fixations
du servo et engagez directement le servo dans son logement
– si nécessaire rajouter un peu de colle.
Fig. 37
12. Positionnez les câbles de commandes des servos
Placez le câble de commande du servo en direction du
fuselage, rallongez le si nécessaire. Au niveau de la nervure
principale, pliez le câble à angle droit vers le haut. Le câble
doit dépasser d’environ 120mm de la nervure principale de
l’aile afin que vous puissiez le connectez facilement sur le
récepteur. Fixez les câbles avec une goûte de colle à chaud
au centre de l’aile.
13. Fixez les guignols des ailerons
Placez les éléments de fixations 25 pour la tringle dans le
trou le plus à l’extérieur du guignol 24. Fixez les à l’aide de
la rondelle 26 et de l’écrou 27. Attention : 1x à gauche et
1x à droite ! Serrez délicatement les écrous puis sécurisez
ceux-ci avec une goûte (appliquée avec une aiguille) de
laque ou de colle rapide. Engagez la vis de blocage Inbus
28 à l’aide de la clé 29 dans l’élément de fixation 25. Collez
les guignols dans leurs logements – enduits au préalable
d’activateur - en veillant à ce que les trous regardent vers la
ligne charnière.
Fig. 38
14. Mise en place des tringles de commandes des
ailerons
Placez la partie en Z des tringles de commandes 30 dans
le trou le plus au centre du palonnier et passez l’autre côté
par le trou de l’élément de fixation 25. Placez les servos et
les gouvernes dans leurs positions de neutre et bloquez la
tringle en serrant la vis 28.
Fig. 39
…………………………………………………………..
15. Lors de l’assemblage du modèle, l’aile est fixée sur le
fuselage à l’aide de la vis 32. Fig.40
16. Assemblage de la radiocommande
Dans les environs de la cabine il vous faut encore placez
les éléments de commandes et l’accu de propulsion. Veillez,
lors du positionnement des différents éléments, à ce que
le centre de gravité se trouve bien à l’endroit indiqué sur la
Fig.43.
Il est possible de placer différents types d’accus, même
de formes différentes, dans le fuselage. Dans le cas où
vous n’arrivez pas à atteindre la bonne position du centre
de gravité, il est possible d’effectuer une correction en
rajoutant du ballast.
Vous trouverez des bandes de Velcro crochets et velours
20+21 dans le kit pour réaliser la fixation des différents
éléments. La puissance de collage du ruban adhésif velcro
ne suffit pas toujours, nous vous conseillons donc de
sécuriser l’ensemble avec une goûte de colle rapide.
Le récepteur se place verticalement derrière la fixation de
l’aile. L’antenne de réception doit sortir du fuselage et se
fixe sous le fuselage avec un petit morceau de ruban
adhésif. Le reste de l’antenne pend librement à l’arrière du
fuselage.
Le moteur fournis dans le kit est préalablement filtré. Ce
filtrage est suffisant si vous utilisez un régulateur MULTICont
X-16 #7 2271.
Dans le cas où vous utilisez un autre régulateur, nous vous
conseillons de renforcer l’antiparasitage du moteur. Pour
cela il existe un kit de filtrage adapté #8 5020. Soudez un
condensateur de 47nF de chaque picot d’alimentation du
moteur vers le corps de celui-ci et entre les picots
d’alimentations.
Mise en place de l’hélice
Avant d’effectuer votre premier essai, il vous faut encore
monter l’hélice. Il est toujours important de vérifier le bon
maintien de celle-ci. Le cône et l’hélice sont à sécuriser
avec une goûte de colle et à coller sur l’axe moteur. Poncez
légèrement l’axe du moteur avec du papier de verre fin.
Pour des hélices Günther utilisez de la colle Epoxy à 5
minutes et de la colle rapide pour les hélices MPX.
Après avoir tout câblé, vous pouvez enfin effectuer un premier
essai, mais surtout pas avant que la colle ne soit vraiment
sèche.
Ne connectez l’accu au régulateur pour le moteur que
si vous avez bien allumé votre radiocommande et
que vous vous êtes assuré que l’élément de
commande du moteur soit en position ‘’OFF’’.
13
Page 14

Allumez la radiocommande et connectez, sur le modèle,
l’accu de propulsion au régulateur et le régulateur au
récepteur. Il est absolument nécessaire que votre régulateur
possède la fonction BEC (alimentation du récepteur sans
accu de réception).
Ne démarrez que brièvement le moteur et vérifiez à nouveau
le sens de rotation du moteur (tenez le modèle lors du
premier essai et enlevez toutes les petites pièces devant
et derrière celui-ci)
Attention prudence : même avec de petits moteur le
risque de blessures corporelles est élevé !
17. Débattements des gouvernes
Afin d’obtenir un certain équilibre des commandes, il est
nécessaire de régler correctement les débattements de
celles-ci. Les débattements des dérives seront toujours
mesurés au point le plus bas.
Gouverne de profondeur
Vers le haut - manche tiré - env. +11 mm
Vers le bas - manche poussé - env. - 11 mm
Connectez les câbles des servos d’ailerons sur le
MagicMixer comme indiqué par la notice “MagicMixer”.
Pour cela veillez à respecter la polarité. La borne
d’impulsion est indiquée sur l’étiquette du MagicMixer par
son symbole. La couleur du câble du signal d’impulsion
est en règle générale jaune ou orange.
Affectation des sorties MagicMixer #1:
r / l = vers l’émetteur pour les sorties gauche/droite
AR = vers le servo d’aileron droit
AL = vers le servo d’aileron gauche
R = vers le servo de direction
Réglez le bon sens de débattement des servos en utilisant
la fonction inversion de votre radiocommande.
Câble en V pour les servos d’ailerons
(Option) # 8 5030
Le câble en V vous donne la possibilité d’utiliser une
radiocommande simple à 4 canaux sans fonction
mélangeur.
La commande des deux servos d’ailerons se fait sur
seule sortie du récepteur grâce au câble en V.
une
Direction
à gauche et à droite
respectivement env. 6 –10 mm
Aileron
Vers le haut env. + 7 mm
Vers le bas env. - 3 mm
MagicMixer #1(Option) # 7 3000
Le MagicMixer #1 vous permet d’utiliser des
radiocommandes simples sans fonction mélangeur. Cela
est suffisant pour:
MINI MAG système de radiocommande 3 canaux
Sans le MagicMixer #1 il faudrait utiliser au minimum une
radiocommande à 4 canaux piloté par microprocesseur
avec fonction mélangeur.
Grâce à ce système vous pouvez utiliser votre MiniMag
avec un émetteur simple comme par exemple Ranger III
(comprise dans le kit EasyStar ou SpaceScooter RTF).
Pour cela, un canal (sortie droite/gauche) pilotera
servo d’aileron au niveau du récepteur et la dérive.
Le système fera en sorte que le sens de rotation et l’ampleur
des débattements du servo soient corrects. Les valeurs
de réglages pour le mélange d’une composante dérive dans
la commande des ailerons (“Combi-Switch”) et le différentiel
d’aileron sont fixées dans le MagicMixer #1.
Différentiel d’aileron signifie de la course de la gouverne
est plus grande vers le haut que vers le bas. Cela permet
d’éviter le phénomène de lacet de votre modèle.
Pour l’utilisation du MagicMixer #1 il faut que les canaux
d’émetteur suivants soient disponibles:
Canal 1: Aileron, avec une action de la dérive (3 servos)
Canal 2: Gouverne de profondeur (1 servo)
Canal 3: Commande moteur (1 régulateur)
deux
Attention: le réglage du différentiel d’aileron doit se faire
mécaniquement. Pour cela, déplacez le palonnier de deux
crans en avant. Cela doit se faire avant le montage du
servo. Dans ce cas la dérive sera commandée par un autre
canal.
Emetteur piloté par microprocesseur
Si vous utilisez ce type d’émetteur, vous n’avez pas besoin
d’utiliser le MagicMixer #1 ni câble en V!
A ce moment la, l’émetteur doit posséder les fonctions
suivantes:
- différentiel d’ailerons
- reverse (inversion de course des servos)
- réglage de course des servos
- en option Combi-Switch (combinaison dérive/ailerons)
Remarque: si vous placez le manche des ailerons à
droite, le gouvernail d’aileron droit doit monter
lorsque vous tenez l’avion dans le sens de vol.
Dans le cas ou les réglages sur votre radiocommande
ne vous permette pas d’atteindre les valeurs cidessus, il sera nécessaire de modifier la longueur
des tringles.
18. Un petit quelque chose pour l’esthétique
Pour cela vous trouverez des décalcomanies couleurs dans
le kit. Les différents symboles et écritures sont à découper
et placer comme sur l’exemple (image de la boite) ou
comme bon vous semble. Si vous utilisez un ensemble de
radiocommande à deux canaux, vous trouverez des
autocollants pour boucher les trous des emplacements
de servos dans l’aile.
19. Réglage du centre de gravité
Afin d’obtenir des caractéristiques de vol stables, vous
devez ajuster le centre de gravité de votre Mini Mag,
comme tout autre modèle, afin que celui-ci se situe à un
certain emplacement sur votre avion. Assemblez
complètement votre modèle comme si vous souhaitiez voler
et montez l’accu de propulsion.
14
Page 15
Le centre de gravité se situe à 67mm du bord d’attaque
de l’aile mesuré à partir du fuselage, reportez le point sur
la partie inférieure de l’aile et vous trouverez un marquage
déjà existant.
Soutenez votre modèle en plaçant un doigt de chaque côté
de l’aile sur ces marquages, le modèle doit rester à
l’horizontal. Vous pouvez effectuer quelques corrections
en déplaçant l’accu de propulsion ou de réception. Lorsque
vous aurez déterminé la bonne position, marquez sur le
fuselage la position de votre accu afin que vous puissiez
toujours retrouver le bon emplacement. Dans le cas où
vous n’arrivez pas à régler le centre de gravité en déplaçant
l’accu, il est également possible de rajouter du ballast.
Fig. 43
20. Préparatifs pour le premier vol
Il est conseillé d’effectuer le premier vol par une météo
sans vent. Pour cela, les occasions se présentent souvent
en soirée.
Effectuez obligatoirement un test de portée avant le
premier vol!
Les accus de la radiocommande et de propulsion sont
bien chargés, en respectant la notice. Assurez vous
la mise en route de votre ensemble radio, que le canal est
disponible.
Une tierce personne s’éloigne avec l’émetteur dont
l’antenne est rentrée.
Tout le long de l’éloignement, la personne devra faire bouger
au moins une commande. Surveillez la réaction de vos
servos. Il ne devrait y avoir aucune perturbation pour les
servos non actionnés jusqu’à une distance d’env. 60m
minimum et le servo commandé devrait répondre
proprement sans hésitations ni tremblements. Ce test
n’est valable que si la bande de fréquence est libre et
qu’aucune autre radiocommande n’émette même sur
d’autres canaux! Le test doit être réitéré avec le moteur
en marche. Qu’une petite diminution de portée est
admissible.
Dans le cas d’une incertitude, vous ne devez pas décoller.
Envoyer l’ensemble du matériel de radiocommande (avec
accu, servos, câblage) à notre section services et
réparation pour effectuer une vérification.
avant
Premier vol ....
Ne faites pas d’essais de décollage avec les moteurs
à l’arrêt!
Le modèle est lancé à la main (toujours contre le vent).
Lors de votre premier vol, laissez vous conseillé par
un pilote chevronné.
Une fois l’altitude de sécurité atteinte, réglez les gouvernes
à l’aide des trims de la radio, de telle manière à obtenir un
vol régulier et droit du modèle.
Familiarisez vous avec le modèle à une altitude suffisante,
observer les réactions du modèle lorsque les moteurs sont
éteints. Simulez des atterrissages avec une certaine
hauteur de vol afin de vous entraîner à atterrir avec les
accus vides.
Evitez dans un premier temps de faire des ‘’virages serrés’’
près du sol ou pendants les phases d’atterrissages.
Atterrissez en toute sécurité même s’il est nécessaire
d’effectuer quelques pas de plus, au lieu de risquer de
casser.
21. Sécurité
Sécurité est un maître mot dans le monde de
l’aéromodélisme. Une assurance est obligatoire. Dans le
cas où vous êtes membre au sein d’un club, vous pouvez
y souscrire une assurance qui vous couvre suffisamment
(préciser s’il s’agit de modèles à moteurs).
Entretenez toujours correctement vos modèles et vos
radiocommandes. Informez vous sur la procédure de
recharge des accus utilisés. Mettre en œuvre toutes les
dispositions de sécurités nécessaires. Informez vous sur
les nouveautés que vous trouverez dans notre catalogue
général MULTIPLEX. Les produits ont été testés par de
nombreux pilotes chevronnés et sont constamment
améliorés pour eux.
Volez d’une manière responsable! Voler juste au-dessus
des têtes n’est pas un signe de savoir faire, le vrai pilote
n’a pas besoin de démontrer son habilitée. Tenez ce
langage à d’autres pseudo pilotes, dans l’intérêt de tous.
Piloter toujours de telle manière à éviter tous risques pour
vous et les spectateurs, et dites vous bien que même avec
la meilleure radiocommande n’empêche pas les
perturbations et les bêtises. De même une longue carrière
de pilote sans incidents n’est pas une garantie pour les
prochaines minutes de vol.
Nous, le Team MULTIPLEX, vous souhaitons beaucoup de
plaisir et de succès pendant la construction et le pilotage.
MULTIPLEX Modellsport GmbH &Co. KG
Produktbetreuung und Entwicklung
Klaus Michler
15
Page 16
Liste des pièces MiniMag RR #26 4211
Nr. Nbr Désignation Matière Dimensions
1 1 Instructions de montage RR Papier DIN-A4
2 1 Planche de décoration Film imprimé 400x700mm
3 1 Fuselage avec verrière complètement assemblé
2x servos et moteur avec régulateur déjà assemblé mousse Elapor pièce complète
6 1 Aile complète pour pilotage en deux axes mousse Elapor pièce complète
7 1 Profondeur avec guignol et fixation déjà assemblée mousse Elapor pièce complète
8 1 Dérive avec guignol et fixation déjà assemblée mousse Elapor pièce complète
Kit de petit nécessaire
20 2 Velcro côté crochets Plastique 25x60mm
21 2 Velcro côté velours Plastique 25x60mm
24 2 Guignol à coller Plastique injecté pièce complète
25 2 Système de fixation pour tringle Métal pièce complète Ø6mm
26 2 Rondelle Métal M2
27 2 Ecrou Métal M2
28 2 Vis Inbus de serrage Métal M3x3mm
29 1 Clé Inbus Métal SW 1,5
30 2 Tringle de commande avec embout en Z pour aileron Métal Ø1x70mm
32 1 Vis Plastique M5x50mm
35 1 Gaine de tringle Plastique 3x2x90mm
47 1 Corde à piano Métal 1,3x250mm
52 1 Hélice Plastique 5,0x4,0’’
75 1 Vis Métal M2x12mm
Train d’atterrissage
70 1 Train d’atterrissage principal avec 2 roue métal/plastique pièce complète
Ø 53mm
CD Notice/vidéo
80 1 CD d’assemblage/ vidéo pièce complète
A B
Auftriebskraft
D
C
α
E
F
X
16
Page 17

Bases du pilotage d’un modèle réduit
Un avion, comme un modèle réduit se pilote avec les gouvernes suivant 3 axes - l’axe vertiical, l’axe longitudinal et l’axe
latéral. Une action sur la commande de profondeur conduit à une modification de la position de vol autour de l’axe latéral. Une
action sur la gouverne de direction conduit à une modification de la position de l’appareil autour de son axe vertical. Si l’on agit
sur les ailerons, l’appareil tourne autour de son axe longitudinal. Etant donné que les ailes possèdent un dièdre, on peut se
passer d’ailerons.
Dans ce cas, une action sur la gouverne de direction déplace l’appareil autour de son axe vertical
des paramètres extérieurs, par ex. des turbulences, qui peuvent amener le modèle à quitter sa trajectoire, c’est au pilote
d’effectuer les manoeuvres nécessaires pour ramener le modèle dans la direction souhaitée. C’est en jouant au moteur
(moteur, hélice) que l’on monte ou que l’on descend. Dans la plupart des cas, la vitesse de rotation du moteur est réglée par
un variateur.
Ce qui est important, c’est qu’en tirant sur la profondeur, le modèle monte, jusqu’à la limite du décrochage. L’angle de montée
dépend donc directement de la motorisation utilisée.
et longitudinal. En fonction
Aile droite
Axe vertical
Verrière
Axe longitudinal
Le profil de l’aile
Le profil de l’aile est un profil creux autour duquel s’écoule
l’air. Les filets d’air qui passent sur le dessus de l’aile
parcourent une distance plus importante que ceux qui
passent sur le dessous. Il en résulte une dépression sur le
dessus de l’aile qui maintient l’appareil en l’air: c’est la
portance. Vue A
Le centre de gravité
Comme tout autre appareil, votre modèle, pour avoir de
bonnes caractéristiques en vol, doit être centré correctement.
C’est pourquoi il est indispensable de centré correctement
le modèle avant le premier vol.
Le centre de gravité se mesure toujours en partant du bord
d’attaque de l’aile, le plus près possible du fuselage. Soutenu
à cet endroit par deux doigts ou mieux encore, posé sur la
balance de centrage MPX Réf. 69 3054, le modèle doit être et
se maintenir à l’horizontale. Vue B
Si le centrage correct n’a pas encore été atteint, celui-ci peut
l’être en déplaçant les éléments de rception, notamment
l’accu de propulsion. Si cela ne suffit toujours pas, rajoutez
du plomb soit à l’avant, dans le nez du fuselage ou à l’arrière,
en le fixant correctement. Si le modèle a tendance à basculer
sur l’arrière, rajoutez du plomb à l’avant, si c’est l’inverse,
rajoutez du plomb à l’arrière.
Angle d’incidence
C’est l’angle d’attaque que forme l’aile par rapport au
stabilisateur. En montant avec soin l’aile sur le fuselage (sans
jour) et le stabilisateur, l’angle d’incidence est
automatiquement respecté.
Dérive
Stabilisateur
Gouvernail de
direction
Axe latéral
Fuselage
Aile gauche
F
Si ces deux réglages ont été effectués avec minutie (centre
de gravité et angle d’incidence), vous n’aurez aucun problème
lors du premier vol. Vue C
Gouvernes et débattements des gouvernes
Vous ne pourrez obtenir de saines qualités en vol que si les
tringles de comùmande des gouvernes sont bien montées,
sans points durs, et que si les débattements des gouvernes
sont respectés. Les débattements indiqués dans la notice
sont recommandables pour les premiers essais, et nous
vous conseillons de les reprendre tels quels. Vous pourrez
toujours par la suite les adapter à votre style de pilotage.
Eléments de commande sur l’ématteur
Sur l’émetteur, il y a deux manches de commande pour la
commande des servos ce qui permet aux gouvernes de votre
modèle de bouger.
L’attribution des manches de commande se fait selon le mode
A, mais d’autres attributions sont possibles.
Les gouvernes ci-dessous sont commandés avec les
éléments de commande suivants:
Gouverne de direction (gauche/droite) Vue D
Gouverne de profondeur (haut/bas) Vue E
Commande moteur (Marche/Arrêt) Vue F
L’élément de commande du moteur ne doit pas revenir
automatiquement au point neutre. C’est pourquoi c’est
élément de commande est cranté. Comment réglé ce
«crantage» est décrit dans la notice d’utilisation de la
radiocommande.
Élévateur
17
Page 18

Regler MULTIcont X-16 # 7 2271
X
Ces instructions font partie intégrante du produit. Celle-ci contient
des informations importantes ainsi que des consignes de
sécurités. Elle doit donc être consultable à tous moments et à
joindre lors d’une revente à tierce personne.
1. D
ONNEES TECHNIQUES
MULTIcont X-16
Nombre d’éléments NiCd/NiMH
6-8 / 2-Zellen
Lipoly
Courant continu 16 A
Fréquence ~ 6 kHz
Alimentation du récepteur (BEC):
Tension BEC 5 V
Courant BEC max. 1 A
Consommation du régulateur BEC max. 2,5 W
Dimensions (sans câble) 27x20x8 mm
Poids avec le câble 17g
2. C
ONSIGNES DE SECURITE
• Lire les instructions avant la mise en marche
• Evitez l’accumulation de chaleur: garantissez une bonne
circulation d’air autour du régulateur.
• Ne pas inverser la polarité de l’accu:
Une inversion des polarités détruirait instantanément le
régulateur.
D’où: • fil rouge sur la cosse POSITIVE (+)
• fil noir sur la cosse NEGATIVE (-)
Nous vous conseillons l’utilisation du connecteur MPX 6 pts #
85213/85214 pour le branchement entre régulateur/accu et
moteur/régulateur, dans le cas où le moteur ne doit pas être soudé
directement.
• Pour tous travaux de soudures ou d’assemblages au niveau de
la propulsion ou du régulateur:
Toujours débrancher l’accu
(Court-circuit/Danger corporel!)
• Pendant les essais ou en fonctionnement normal:
Ne pas tenir le moteur en marche dans la main, bien fixer le modèle.
Vérifier si vous avez suffisamment de place pour la rotation de
l’hélice. Enlever tous les objets qui seraient sujet à une aspiration
(vêtement, petites pièces, papier, etc.) des environs de l’hélice. Ne
vous tenez jamais devant l’hélice ou au niveau du plan de rotation de
celle-ci (dangers corporels !).
3. P
ROPRIETES PARTICULIERES
• Système BEC avec coupure d’alimentation par détection de
sous-tension (conseillé jusqu’à 8 éléments max.) avec détection
automatique du nombre d’éléments.
• Système de sécurité au démarrage: si vous connectez l’accu de
propulsion, le régulateur reste en mode sécurité. La propulsion ne
fonctionnera uniquement lorsque le manche des gaz sera mis pour
un court instant en position ralenti après le branchement de l’accu.
La LED clignotera également.
• Protection contre la surcharge l’alimentation du moteur est coupée
à partir du moment où le régulateur détecte une surcharge ou une
surchauffe. Pour réactiver l’ensemble il faut débrancher et
rebrancher l’accu de propulsion.
• Protection contre les surtensions
Le régulateur coupe l’alimentation s’il détecte une tension >16 V.
4. B
RANCHEMENT DE LA PROPULSION
Remarque: Pour le montage du régulateur il est nécessaire d’effectuer
quelques soudures qui demandent un minimum de rigueur. En effet, de
celle-ci dépend le bon fonctionnement de l’ensemble
, et pour cela il
faut :
• n’utiliser que de l’étain utilisé en assemblage de cartes
électroniques
• ne pas utiliser de graisse de soudure à base de produits acides
• ne pas trop chauffer, mais suffisamment, les parties à souder
• demander conseil ou de l’aide à une personne du métier
-16# 72271
1. Filtrage du moteur: si votre moteur n’est pas filtré en sortie d’usine,
3. Contrôlez le sens de rotation
Si le sens de rotation n’est pas correct (par ex. Lors de
l’utilisation de réducteurs), il suffit d’inverser les fils
d’alimentations au niveau du moteur.
5. M
1. Connecter le câble de liaison (REC) du régulateur au
récepteur.
Pour les radios MULTIPLEX sur le canal 4= Gaz/Moteur
2. Pour les radios programmables, régler le débattement du servo
Gaz/Moteur à 100% pour les deux sens.
3. Placer le manche des Gaz (ainsi que leur Trimm!
complètement dans la position ralentie/Arrêt Moteur
souhaité.
4. Mise en marche de l’émetteur
5. Connecter l’accu de propulsion au régulateur
Attention: une inversion de polarité détruit immédiatement le
régulateur!
Si la LED clignote, le régulateur est en mode sécurité au démarrage
Æ débranchez l’accu du régulateur, inversez le sens de débattement
du canal des gaz sur votre émetteur (Servo-Revers) et rebranchez à
nouveau l’accu de propulsion Æ près.
• Important:
• Allumez l’émetteur en premier, branchez ensuite l’accu de
propulsion
Si la LED clignote, le régulateur est en mode sécurité au
démarrage Æ placez le manche des gaz en position ralenti Æ le
régulateur est opérationnel!
• Débranchez d’abord l’accu de propulsion du régulateur
avant d’ETEINDRE l’émetteur
6. BEC = B
BEC signifie: récepteur et servos sont alimentés par l’accu de
propulsion. Aucun accu de réception supplémentaire n’est
nécessaire.
• Remarque: attention, l’alimentation BEC du MULTIcont X-16 ne
peut délivrer qu’1A pour la partie réception dans le model. En
pratique, cela signifie que:
Branchez un max. de 3 servos pour une alimentation en 7 éléments,
2 servos pour 8 éléments, n’utilisez pas l’alimentation BEC audessus de 8 éléments.
La consommation de courant est directement dépendante de la
puissance des servos, de l’intensité de manipulation des manches et
de la dureté des gouvernes (!). S’il n’est pas possible de mesurer
l’intensité du courant BEC :
Effectuer un test de fonctionnement au sol, actionner les servos en
permanence jusqu’à ce que l’accu soit en sous-tension (= accu de
propulsion vide). Le régulateur ne doit pas beaucoup chauffer, la
commande des servos doit être possible sans problèmes tout au long
du test!
Dans le cas ou le model nécessite plus de servos, il est conseillé de
ne pas utiliser l’alimentation BEC et de rajouter un accu
supplémentaire.
Pour cela, il faut déconnecter le fil rouge (+)
récepteur.
7. A
La fonction Arrêt par sous-tension du MULTIcont X-16 garantie un
arrêt du moteur en fin de décharge du pack d’accu de propulsion. De
ce fait, une énergie suffisante est toujours gardée pour l’alimentation
BEC du récepteur afin de pouvoir garantir un atterrissage correct.
Une autre indication de décharge de l’accu de propulsion est la chute
de la vitesse de rotation du moteur. Il faudra penser à atterrir
rapidement. Le régulateur coupe l’alimentation de la propulsion
lorsque l’accu ne dispose plus que de 65% de sa tension de
démarrage. Suite à cela, il est tout de même possible de réactiver la
propulsion pour peu de temps si le manche des gaz est resté au
ralenti/arrêt moteur pendant un petit laps de temps
il est fortement conseillé d’utiliser le kit de filtrage # 85020 afin
d’éviter de récupérer des perturbations de l’ensemble RC.
2. Branchement des fils du régulateur au moteur Soudez les fils
d’alimentations du moteur, repérés „MOTOR“ sur le régulateur, aux
cosses du moteur de propulsion:
En règle générale pour une propulsion directe: jaune Æ „+“ ; bleu Æ
„-“
Instructions MULTICont
MULTIPLEX Modellsport GmbH & Co. KG • Neuer Weg 2 • D-75223 Niefern • www.multiplex-rc.de
ISE EN MARCHE
) de l’émetteur
ATTERY ELIMINATING CIRCUIT
du régulateur qui va au
RRET PAR SOUS-TENSION
Page 19

RR # 26 4211
GB
Examine your kit carefully!
MULTIPLEX model kits are subject to constant quality checks throughout the production process, and we sincerely
hope that you are completely satisfied with the contents of your kit. However, we would ask you to check all the parts
before you start construction, as we cannot exchange components which you have already worked on. If you
find any part is not acceptable for any reason, we will readily correct or exchange it. Just send the component to our
Model Department. Please be sure to include the purchase receipt and a brief description of the fault.
We are constantly working on improving our models, and for this reason we must reserve the right to change the kit
contents in terms of shape or dimensions of parts, technology, materials and fittings, without prior notification. Please
understand that we cannot entertain claims against us if the kit contents do not agree in every respect with the
instructions and the illustrations.
Caution!
Radio-controlled models, and especially model aircraft, are by no means playthings. Building and operating
them safely requires a certain level of technical competence and manual skill, together with discipline and
a responsible attitude at the flying field. Errors and carelessness in building and flying the model can result
in serious personal injury and damage to property. Since we, as manufacturers, have no control over the
construction, maintenance and operation of our products, we are obliged to take this opportunity to point out
these hazards and to emphasise your personal responsibility.
Additional items required for the Mini Mag:
Adhesive and activator:
Use medium-viscosity cyano glue (
adhesives produce what initially appears to be a sound joint, but the bond is only superficial, and the hard resin breaks
away from the parts under load.
Hot-melt glues can also be used.
not styrofoam cyano). It is important to use activator when using cyano. Epoxy
MULTIPLEX radio control system components for the Mini Mag:
e.g. PiCO 5/6 UNI receiver 35 MHz A Order No. 5 5920
alternatively 40 MHz Order No. 5 5921
or Micro IPD UNI receiver 35 MHz A Order No. 5 5971
alternatively 40 MHz Order No. 5 5972
plus optionally:
Nano S UNI or HS 55 servo (2 required) Ailerons Order No. 6 5120
UNI extension lead, 300 mm Aileron servo, 2 x Order No. 8 5031
if required: UNI separation filter lead, 200 mm Aileron servo, 2 x Order No. 8 5035
plus optionally:
Magicmixer #1 for three-channel RC transmitter with no mixers Order No. 7 3000
UNI Y-lead for four-channel RC transmitter with sep. rudder control Order No. 8 5030
Flight batteries:
e.g. MULTIPLEX Permabatt NiMH battery (AA cells), 7 / 1500 mAh Order No. 15 6030
or MULTIPLEX Permabatt NiMH battery (AA cells), 8 / 1500 mAh Order No. 15 6037
or MULTIPLEX LiBatt (LiPo) P-CS, 2 / 1-2000 mAh Order No. 15 7016
or MULTIPLEX LiBatt (LiPo) SX-BX, 2 / 1-2100 mAh Order No. 15 7130
Battery charger:
MULTIcharger LN-5014 DC (charge current 100 mA … 5 A) Order No. 9 2531
1 - 14 NiCd / NiMH cells and 1 - 5 Lithium-Polymer cells
Options:
Float set Order No. 73 3069
Upgrade 1: Easy Glider power set (3 : 1 geared Permax 400) Order No. 33 2688
plus 3.5 mm Ø driver Order No. 33 2310
and propeller, 8 x 3.8” Order No. 73 3139
Upgrade 2: “Sport” power set, BL-X 22-18
Contents: motor, propeller driver, speed controller and propeller Order No. 33 2627
Tools: Scissors, balsa knife, combination pliers, slot-head and cross-point screwdrivers (servo output arms and motor
retaining screws), soldering iron if required.
Note: please remove the illustration pages from the centre of the instructions.
19
Page 20

Specification:
Wingspan 1010 mm
Overall fuselage length 820 mm
All-up weight min. 580 g
Wing loading (FAI) min. 26 g/dm²
Power system min. Permax 400 6 V
RC functions: Rudder, elevator and motor; optional rudder
Important note
This model is not made of styrofoam™, and it is not
possible to glue the material using white glue or
epoxy. Please be sure to use cyano-acrylate glue
exclusively, preferably in conjunction with cyano
activator (kicker). We recommend medium-viscosity
cyano. This is the procedure: spray cyano activator
on one face of the Elapor®; allow it to air-dry, then
apply cyano adhesive to the other face. Join the parts,
immediately position them accurately, and wait a few
seconds for the glue to harden.
One further option:
For float operations a water rudder has to be cut from 3
mm Depron. It is fixed between the wire frame using
adhesive tape, and attached to the tailwheel wire using
two collets. These parts are included in the float set.
4. Installing the motor
The model is fitted with a Permax 400 motor as standard.
However, you may wish to install an upgrade power plant.
We recommend the following two options:
A. Standard G Permax 400 with 3 : 1 gearbox Fig. 20
Easy Glider E power set
(3 : 1 gearbox with Permax 400) # 33 2688
plus 3.5 mm Ø propeller driver # 33 2310
and 8 x 3.8” propeller # 73 3139
B. “Sport” power set BL-X 22-18 # 33 2627
This includes speed controller, propeller driver and propeller
Please take care when handling cyano-acrylate
adhesives. These materials harden in seconds, so don’t
get them on your fingers or other parts of the body.
We strongly recommend the use of goggles to protect
your eyes. Keep the adhesive out of the reach of
children.
1. Before assembling the model
Please check the contents of your kit.
You will find Figs. 01 + 02 and the Parts List helpful here.
The illustrations which refer to completing your RR model
are marked RR + KIT. The pictures marked with KIT only
are just for your information, in case you need to repair the
model at any time using replacement parts.
2. Opening and closing the canopy
Hold the front of the canopy moulding and pull it upward;
this opens the canopy.
To close it again, insert the rear locating lug, push the
canopy back as far as it will go, and press down the front
until it engages.
Final assembly
3. Tailwheel option
A tailwheel can be fitted to the model if you wish. This is
optional for the land-based version, but is essential if you
intend to install floats later, because a water rudder is
required for this version, and this is fitted to the tailwheel
wire. Figs. 09 - 13 show the procedure.
A bending template is shown in Figs. 12 + 12a. The steel
wire 47 has a diameter of 1.3 mm. The sleeve 35 is supplied
in the kit.
Installation:
Pierce a tunnel through the tailplane and the fuselage as
shown in Fig. 11. Note that the foam tailskid has to be cut
away if you fit the optional tailwheel. Cut a notch in the
rudder for the actuating wire. Fig. 10.
Glue the sleeve 35 in place using cyano, and cut it to
length as shown. The final, upper bend in the tailwheel
wire 47 should only be made after fitting it through the
sleeve 35.
5. Connecting the motor
Carry out a test-run! The motor shaft / propeller must rotate
anti-clockwise when viewed from the front. If not, reverse
the connections at the motor terminals.
6. Releasing the elevator and rudder
Move the rudder and elevator to and fro repeatedly at the
hinge line to free up the hinges. Do not cut off the control
surfaces! Figs. 25 + 27
7. Gluing the tail panels to the fuselage
Position the tailplane on the fuselage “dry” (no glue), and
check that the parts fit together accurately. Ensure in
particular that the tailplane 7 rests on the fuselage without
any gaps, and is parallel to the wing saddle. Check this
by laying the wing on the fuselage and sighting over the
wing and tailplane from the nose. When you are confident
that the tailplane can be aligned properly, it should be glued
permanently to the fuselage. Check alignment once more,
and ensure that it fits snugly before allowing the glue to
cure fully.
Place the fin on the fuselage “dry”, and check that it fits
correctly. In this case ensure that the fin 8 makes good
contact, without gaps, and is at 90° to the wing saddle
and the tailplane. Use a setsquare to check this.
Fig. 30
8. Retaining the elevator and rudder pushrods
Slip the end of the two steel pushrods 41 and 42 through
the pushrod connectors 25. Set the servos and control
surfaces to centre (neutral) and tighten the socket-head
grubscrews 28 to lock them. You may need to bend the
pushrods slightly to obtain proper alignment.
Figs. 31 - 32
9. Installing the undercarriage
The undercarriage is supplied pre-assembled; compress
the unit gently and allow it to snap into the holder 74.
Install the screw 75. Fig. 34
20
Page 21

Optional ailerons
If you wish to fly the model with just rudder / elevator
controls, skip stages 10 - 14 Abb.36-39. The servo wells
can be sealed later using the decals supplied.
The model flies equally well as a rudder / elevator or “fullhouse” model with the same dihedral. This means that
you can convert the model to aileron control at any time.
……………………………….
If you wish to fly the model with aileroms („full-house“
control), resume construction at this point:
15. When the model is assembled, the wing is attached to
the fuselage using the plastic screw 32. Fig. 40
16. Installing the receiving system
The remaining RC system components can now be installed
in the cabin area, and the flight battery installed. It is
important to position the battery in such a way that the
model balances at the stated CG position. See Fig. 43.
It is possible to fit many different types and shapes of
battery in the front end of the fuselage. If it is not possible
to obtain the correct CG by re-positioning the battery, lead
ballast can be fitted at the nose or tail.
10. Releasing the ailerons, installing the aileron
servos
Cut through the wing 6 at both ends of the ailerons to
release them. Move the ailerons to and fro repeatedly at
the hinge line to free up the hinges. Do not cut off the
ailerons!
Fig. 36
11. Installing the aileron servos
Set the servos to “neutral” from the transmitter. Fit the
output arms on the servos so that the arms are at 90° to
the long case sides; prepare one left-hand servo and one
right-hand servo in this way.
Offer up the servos to the moulded recesses in the wing 6;
you may need to make minor adjustments to suit the servos
you intend to fit. Apply a drop of hot-melt glue in the slots
in the wing for the servo mounting lugs, and immediately
press the servo into the recess. Apply a little more glue
afterwards if necessary.
Fig. 37
12. Deploying the aileron servo leads
Deploy the servo leads towards the wing centre; you may
need to use extension leads. Place the lead in a straight
line along the front edge of the spar well, standing on edge.
The leads must project by about 120 mm at the wing root,
so that they can be connected to the receiver when you
assemble the model. Fix the leads in the centre of the
wing with a drop of hot-melt glue.
13. Attaching the aileron horns
Insert the pushrod connectors 25 in the outermost hole in
the aileron horns 24. Secure them with the washers 26
and nuts 27. Caution: prepare one left-hand horn, one
right-hand horn! Tighten the nuts carefully (don’t overtighten
them), and secure each with a tiny drop of paint or cyano,
applied on a pin. Fit the socket-head grubscrews 28 in the
pushrod connectors 25 using the allen key 29. Glue the
horns 24 in the recesses in the ailerons using activator
and cyano; the row of holes must be at the hinge line.
Fig. 38
14. Installing the aileron pushrods
Connect the pre-formed end of the steel pushrods 30 to
the innermost hole of the servo output arms, and slip the
plain end through the pushrod connectors 25. Set the
ailerons and servos to neutral and tighten the grubscrews
28 to lock them.
Fig. 39
……………………………………..
The kit is supplied with self-adhesive hook-and-loop tape
20 + 21 for securing the RC components. However, the
adhesive on the tape is not always adequate, so it should
also be glued in place with cyano.
Place the receiver vertically in the fuselage, behind the
wing retaining screw. Run the wire aerial out of the fuselage
and tape it to the underside at the tail. The excess length
can simply be left trailing freely.
The motor supplied is fitted with basic suppressors as
standard, and this level of suppression is adequate provided
that you use the recommended MULTIcont X-16 speed
controller, # 7 2271.
If you wish to use a different controller, it is advisable to fit
additional suppressors to the motor. A suppressor set is
available for this purpose under # 8 5020. Solder one 47
nF capacitor between each motor terminal and the motor
can, and the third 47 nF capacitor between the motor
terminals to form a bridge.
Fitting the propeller
Before the first test run the propeller has to be fitted on the
motor shaft. Please check that the propeller is firmly fixed.
The spinner and propeller should be pushed onto the motor
shaft and secured with a drop of glue after roughening the
shaft with abrasive paper. For the Günther propeller use 5minute epoxy; cyano works better with the MPX propeller.
When you have completed the wiring you can carry out an
initial test-run, but please allow the glue to harden before
you do this.
Don’t connect the battery to the speed controller until
you have switched the transmitter on, and have
checked that the throttle control is at the “OFF”
position.
Switch the transmitter on, connect the flight battery in the
model to the speed controller, and the controller to the
receiver. The controller you use must be what is known as
a BEC type, i.e. with an integral receiver power supply
drawn from the flight battery.
Now switch the motor on briefly and check once more that
the propeller is rotating in the correct direction. Note: when
test-running the motor always remove all light objects from
the area in front of and behind the model, and hold the
aeroplane firmly.
Caution: even small motors and propellers are
capable of inflicting painful injuries!
21
Page 22

17. Setting the control surface travels
It is important to set the control surface travels correctly,
as these settings have a crucial influence on the model’s
overall control response. In all cases the travels are
measured at the point of maximum chord (width of control
surface.
Elevator
up - stick back - approx. + 11 mm
down - stick forward - approx. - 11 mm
Rudder
left and right each way - approx. 6-10 mm
Ailerons
up - approx. + 7 mm
down - approx. - 3 mm
MagicMixer #1 (optional) # 7 3000
The MagicMixer #1 permits the use of a simple radio control
transmitter without mixer functions. It is adequate for:
MINI MAG 3-channel RC transmitter
Without the MagicMixer #1 you will need at least a fourchannel computer transmitter with mixer functions.
Using this module the Mini Mag can be flown even with a
transmitter such as the Ranger III, as supplied with the
EasyStar and SpaceScooter RTF models.
It provides a means of controlling
the rudder from a single channel (right / left output) at the
receiver.
two aileron servos and
If necessary, set the correct direction of servo travel using
the servo reverse facility on your transmitter.
Y-lead for the aileron servos (optional) # 8 5030
The Y-lead permits the use of a simple four-channel radio
control transmitter, i.e. without mixer functions. The two
aileron servos are actuated simultaneously by a
receiver servo output.
Please note: in this case the differential aileron movement
must be obtained by mechanical means. This is achieved
by offsetting the servo output arms forward by two splines.
This must be done before you install the servos. The rudder
is controlled via a separate channel with this arrangement.
Computer radio control transmitter
If you have this type of transmitter you need neither a
MagicMixer #1 nor a Y-lead.
The transmitter must feature the following adjustment
facilities:
- Aileron differential mixer
- Servo reverse
- Servo travel adjustment
- Optional combi-switch (coupled rudder / ailerons)
Note: when you apply a right-aileron command at
the transmitter, the right-hand aileron (as seen from
the tail) must deflect up.
If you find that you cannot set the correct control
surface travels with your radio control system, you
will need to change the linkage hole to which the
pushrod is connected.
single
The servos, and therefore the control surface travels, are
automatically actuated with the correct deflections. Using
the MagicMixer #1 the degree to which the rudder follows
the ailerons (“combi-switch” / CAR function) and the aileron
differential are fixed, i.e. they cannot be altered.
Aileron differential means that the up-aileron travel is greater
than the down-aileron travel. This helps to prevent the model
swinging away from the turn (adverse yaw) when ailerons
are applied.
If you are using the MagicMixer #1 your transmitter must
offer at least the following channels:
Channel 1: Ailerons, coupled rudder (3 servos)
Channel 2: Elevator (1 servo)
Channel 3: Throttle (1 servo)
Connect the aileron servo leads as described in the
“MagicMixer #1” instructions. Take care to maintain
correct polarity when making these connections: the signal
pin is indicated on the label of the MagicMixer with the
square signal symbol. The signal wire in the servo lead is
generally yellow or orange.
Connections at the MagicMixer #1:
r/l = to receiver, right / left output
AR = to right aileron servo
AL = to left aileron servo
R = to rudder servo
18. Gilding the lily
The kit includes a multi-colour decal sheet. Cut out the
individual name placards and emblems and apply them to
the model, either following our scheme (kit box illustration)
or using your own arrangement. If you have built the rudder
/ elevator version of the model, you will find decals on the
sheet designed for covering the servo recesses in the wing.
29. Balancing
To make your Mini Mag fly safe and stable it must be
balanced at the correct point or C.G. (Centre of gravity) just like every other aircraft. Assemble your model
completely, ready to fly, and install the flight battery.
The Centre of Gravity should be at a point 67 mm aft of
the leading edge of the wing, measured where the wing
meets the fuselage. You will find the markings moulded on
the underside of the wings.
Support the model on your fingertips at the marked point,
and it should balance level. If necessary, adjust the position
of the flight battery until the plane wings levels. Once the
correct position is found, mark it inside the battery box to
ensure that the battery is always replaced in exactly the
same location. Fig. 43
20. Preparing for the first flight
Wait for a day with as little breeze as possible for the first
flight. The evening hours often provide the best conditions.
22
Page 23

# 26 4211
RR
Ready for Radio
6
3
7
8
70
47
2 x 20
35
30
32
2 x 21
29
28
Abb. 01
RR
2
1
24
24
80
25
26
27
52
Abb. 02
RR
23
Page 24

3
4
41
45
43
20 mm
22
Hot
glue
Abb. 03
KIT
Abb. 05
KIT
CA
CA
Hot
glue
42
46
22
44
20 mm
Abb. 04
KIT
CA
Abb. 06
KIT
CA
3
Ø 26
# 73 3199
Heckrad=Option. Die Teile
liegen dem BK nicht bei!
Tailwheel = option. Parts not
included in the kit
24
Abb. 07
KIT
Depron
Abb. 09
KIT+RR
4
Abb. 08
KIT
30
8
Abb. 10
RR
Page 25

Stahl/Steel
Ø 1,3 mm
4
47
Abb. 11
KIT+RR
Abb. 12
KIT+RR
35
Stahl/Steel
Ø 1,3 mm
47
M 1:1
18mm
Stahl/Steel
Ø 1,3 mm
Depron
3 mm
M 1:1
Abb. 12 a
KIT+RR
Abb. 13
KIT+RR
33 - 34
Die Teile liegen dem BK nicht bei!
These parts not included in the kit
Abb. 13 a
KIT+RR
CA
4
Abb. 14
KIT
25
Page 26

MPX-Prop.
Abb. 15
KIT
CA
Abb. 17
KIT+RR
52 60 50 61
CA
Abb.16
KIT
CA
2 x 62
4 x 63
Abb. 17
KIT
Abb. 19
KIT+RR
# 33 2688
(Antrieb / motor Easy Glider E)
30
23
Abb. 18
KIT
Mitnehmer
für Ø 3,5 mm /
3.5 mm Ø driver
# 33 2310
passende Luftschraube / propeller
8 x 3,8“
# 73 3139
Abb. 20
KIT+RR
CA
26
Abb. 21
KIT
5
Abb. 22
KIT
Page 27

28 25 24 26 27
5
CA
Abb. 23
KIT+RR
7
Abb.24
KIT
7
CA
28 25 24 26 27
Abb. 26
KIT
gängig machen!
Move to and fro to ease hinge
gängig machen!
Move to and fro to ease hinge
Abb. 25
8
KIT+RR
8
CA
Abb. 27
KIT+RR
30
Abb. 28
KIT+RR
CA
Abb.29
KIT+RR
!
Abb.30
KIT+RR
27
Page 28

Abb. 31
KIT+RR
Abb. 32
KIT+RR
70
72
40
73
71
31
72
73
Abb. 33
KIT
CA
40
Abb. 34
KIT+RR
74
75
74
M3x12mm
Abb. 36
KIT+RR
Abb. 35
KIT
28
Hot
glue
Abb.37
KIT+RR
30
6.
28 25 24 26 27
CA
Abb. 38
KIT+RR
Page 29

Abb. 39
KIT+RR
32
Abb.40
KIT+RR
Abb. 41
KIT+RR
# 73 3069
Schwimmerbausatz/Float kit
Abb. 42
KIT+RR
Abb.43
KIT+RR
29
Page 30

Ersatzteile (bitte bei Ihrem Fachhändler bestellen)
Replacement parts (please order from your model shop)
Pièces de rechanges (S.V.P. à ne commander que chez votre revendeur)
Parti di ricambio (da ordinare presso il rivenditore)
Repuestos (por favor, diríjase a su distribuidor)
# 22 4176
Kabinenhaube
Canopy
Verrière
Capottina
Cabina
# 22 4179
Kleinteilesatz
Small items set
Petit nécessaire
Minuteria
Piezas pequeñas
# 22 4175
Rumpfhälften + Bowdenzüge
Fuselage shells + snakes
Moitié de fuselage + tringlerie
Semigusci fusoliera + bowden
Fuselaje + trans. bowden
# 22 4178
Leitwerkssatz
Tail set
Kit de gouvernes
Piani di coda
Timones
# 22 4177
Tragfläche
panel
Aile
Ali
Alas
# 72 4388
Dekorbogen
Decal sheet
Planche de décoration
Decals
Lámina decorativa
# 22 4180
Fahrwerkssatz
Undercarriage compon.
Train d’atterrissage
Parti per carrello
Kit del tren de aterrizaje
# 70 3455
Gestängeanschluss (2x)
Pushrod connector (2x)
Element de fixitation (2x)
Raccordo rinvii (2x)
Conexión del verillaje(2x)
# 72 3135
# 33 2545
Motor
Motor
Moteur
Motore
Motor
# 33 2699
Motorträger
Motor mount
Support moteur
Supporto motore
Soporte del motor
# 72 5136
Canopy-Lock
Kabinenhaubenverschluss
Fermeture de verrière
Chiusura capottina
Cierre de cabina
Permax 400 6V
# 72 4279 / # 72 4293
Luftschraube
Propeller
Hélice
Elica
Hélice
30
# 71 3340
Schraube M5x50mm (10x)
Screw M5x50mm (10x)
Vis M5x50mm (10x)
Vite M5x50mm (10x)
Tornillo M5x50mm (10x)
5,0x4,0" / 12,7x10,2cm
Page 31

Be sure to carry out a range check before the first
flight!
The transmitter battery and flight pack must be fully charged
according to the instructions. Ensure that the channel you
are using is not already in use
transmitter.
Collapse the transmitter aerial, and ask a friend to walk
away from you holding the transmitter.
As he walks away your friend should constantly operate
one control function while you watch the model’s servos.
The servo not being operated should stay motionless up
to a range of around 60 m, and the other servo should
follow the transmitter stick movements smoothly and
immediately. This test only provides meaningful results if
the radio band is “clean” (not suffering interference), and if
no other radio control transmitters are switched on,
they are on different channels. If successful, repeat the
check with the motor running. The effective range should
not be significantly reduced when the motor is running.
If you are not sure about anything, do not fly the model! If
you cannot eliminate the problem send the whole radio
control system (including battery, switch harness, servos)
to the manufacturer’s service department for checking.
The first flight ....
Do not test-glide this model!
The model is designed for hand-launching - always exactly
into the wind.
We recommend that you ask an experienced
modeller to help you during the first flight.
Allow the model to climb to a safe altitude, then adjust the
trims on the transmitter so that the model flies straight
ahead without any help from you.
before you switch on the
even if
Don’t attempt tightly banked turns close to the ground at
first, and especially not on the landing approach.
It is always better to land safely some distance away, and
have to walk to collect the model, than to risk damaging it
by dragging it close to your feet.
21. Safety
Safety is the First Commandment when flying any model
aircraft. Third party insurance should be considered a basic
essential. If you join a model club suitable cover will usually
be available through the organisation. It is your personal
responsibility to ensure that your insurance is adequate
(i.e. that its cover includes powered model aircraft).
Make it your job to keep your models and your radio control
system in perfect order at all times. Check the correct
charging procedure for the rechargeable batteries used in
your RC set. Make use of all sensible safety systems and
precautions which are advised for your system. An excellent
source of practical accessories is the MULTIPLEX main
catalogue, as our products are designed and manufactured
exclusively by practising modellers for other practising
modellers.
Always fly with a responsible attitude. You may think that
flying low over other people’s heads is proof of your piloting
skill; others know better. The real expert does not need to
prove himself in such childish ways. It is in all our interests
that you let other pilots know that this is also what you
think. Always fly in such a way that you do not endanger
yourself or others. Bear in mind that even the best RC
system in the world is subject to outside interference. No
matter how many years of accident-free flying you have
under your belt, you have no idea what will happen in the
next minute.
We - the MULTIPLEX team - hope you have many hours of
pleasure building and flying your new model.
At a safe height switch off the motor and make yourself
familiar with the model’s control response on the glide.
Carry out a dummy landing approach at a good height, so
that you will feel confident about the real landing when the
flight pack is flat.
Klaus Michler
Product development
MULTIPLEX Modellsport GmbH & Co. KG
31
Page 32

Parts List MiniMag RR kit # 26 4211
Part No. Description Material Dimensions
No. off
1 1 Building instructions, RR Paper A4
2 1 Decal sheet Printed adhesive film 400 x 700 mm
3 1 Fuselage and cabin, factory-assembled,
two servos, motor and controller installed Elapor foam Ready made
6 1 Wing, factory-assembled, for R / E version Elapor foam Ready made
7 1 Tailplane with horn and pushrod connector fitted Elapor foam Ready made
8 1 Fin with horn and pushrod connector fitted Elapor foam Ready made
Small parts set
20 2 Hook-and-loop tape, hook Plastic 25 x 60 mm
21 2 Hook-and-loop tape, loop Plastic 25 x 60 mm
24 2 Glue-fitting horn Inj. moulded plastic Ready made
25 2 Pushrod connector, 6 mm Ø Metal Ready made
26 2 Washer Metal M2
27 2 Nut Metal M2
28 2 Socket-head grubscrew Metal M3 x 3 mm
29 1 Allen key Metal 1.5 mm A/F
30 2 Pre-formed aileron pushrod Metal 1 Ø x 70 mm
32 1 Screw Plastic M5 x 50 mm
35 1 Snake outer sleeve Plastic 3 x 2 x 90 mm
47 1 Steel rod Metal 1.3 Ø x 250 mm
52 1 Propeller Plastic 5.0 x 4.0”
75 1 Screw Metal M3 x 12 mm
Undercarriage
70 1 Main undercarriage with two 53 mm Ø wheels Metal / plastic Ready made
CD instructions / video
80 1 CD instructions / video Ready made
A B
Auftriebskraft
X
D
C
α
32
E
F
Page 33

Basic information relating to model aircraft
Any aircraft, whether full-size or model, can be controlled around the three primary axes: vertical (yaw), lateral (pitch) and
longitudinal (roll).
When you operate the elevator, the model’s attitude alters around the lateral axis. If you apply a rudder command, the model
swings around the vertical axis. If you move the aileron stick, the model rolls around its longitudinal axis. As our EasyStar has
considerable wing dihedral, ailerons are not required for roll control. In this case the rudder is used both to turn the model
around the vertical axis, and also to roll it (longitudinal axis). External influences such as air turbulence may cause the model to
deviate from its intended flight path, and when this happens the pilot must control the model in such a way that it returns to the
required direction. The basic method of controlling the model’s height (altitude) is to vary motor speed (motor and propeller). The
rotational speed of the motor is usually altered by means of a speed controller. Applying up-elevator also causes the model to
gain height, but at the same time it loses speed, and this can only be continued until the model reaches its minimum airspeed
and stalls. The maximum climb angle varies according to the power available from the motor.
R.H. wing
panel
normal axis
Canopy
Longitudinal axis
Wing section
The wing features a cambered airfoil section over which the
air flows when the model is flying. In a given period of time the
air flowing over the top surface of the wing has to cover a
greater distance than the air flowing under it. This causes a
reduction in pressure on the top surface, which in turn creates
a lifting force which keeps the aircraft in the air. Fig. A
Centre of Gravity (CG)
To achieve stable flying characteristics your model aircraft must
balance at a particular point, just like any other aircraft. It is
absolutely essential to check and set the correct CG position
before flying the model for the first time.
The CG position is stated as a distance which is measured aft
from the wing root leading edge, i.e. close to the fuselage.
Support the model at this point on two fingertips (or - better use the MPX CG gauge, # 69 3054); the model should now
hang level. Fig. B
If the model does not balance level, the installed components
(e.g. flight battery) can be re-positioned inside the fuselage. If
this is still not sufficient, attach the appropriate quantity of trim
ballast (lead or plasticene) to the fuselage nose or tail and
secure it carefully. If the model is tail-heavy, fix the ballast at the
fuselage nose; if the model is tail-heavy, attach the ballast at
the tail end of the fuselage.
The longitudinal dihedral is the difference in degrees between
the angle of incidence of the wing and of the tail. Provided that
you work carefully and attach the wing and tailplane to the
fuselage without gaps, the longitudinal dihedral will be correct
automatically.
Fin
Tailplane
Rudder
Elevator
lateral axis
L.H. wing
Fuselage
panel
GB
If you are sure that both these settings (CG and longitudinal
dihedral) are correct, you can be confident that there will be no
major problems when you test-fly the model. Fig. C
Control surfaces, control surface travels
The model will only fly safely, reliably and accurately if the control
surfaces move freely and smoothly, follow the stick movements
in the correct “sense”, and move to the stated maximum travels.
The travels stated in these instructions have been established
during the test-flying programme, and we strongly recommend
that you keep to them initially. You can always adjust them to
meet your personal preferences later on.
Transmitter controls
The transmitter features two main sticks which the pilot moves
to control the servos in the model, which in turn operate the
control surfaces.
The functions are assigned according to Mode A, although
other stick modes are possible.
The transmitter controls the control surfaces as follows:
Rudder (left / right) Fig. D
Elevator (up / down) Fig. E
Throttle (motor off / on) Fig. F
Unlike the other controls, the throttle stick must not return to
the neutral position automatically. Instead it features a ratchet
so that it stays wherever you put it. Please read the instructions
supplied with your radio control system for the method of setting
up and adjusting the transmitter and receiving system.
33
Page 34

MULTIcont X-16 speed controller # 7 2271
X
These operating instructions are an integral part of this
product. They contain important information and safety
notes, and should therefore be kept in a safe place at all
times. Be sure to pass them on to the new owner if you
ever dispose of the product.
PECIFICATION
1. S
MULTIcont X-16
Cell count, Ni-Cd / Ni-MH
6 - 8 /
2 Li-Poly cells
Continuous current 16 A
Pulse frequency ~ 6 kHz
Receiver power supply (BEC):
BEC voltage 5 V
BEC current max. 1 A
Dissipated power of BEC controller max. 2.5 W
Dimensions (excl. cables) 27 x 20 x8 mm
Weight incl. cables 17 g
AFETY NOTES
2. S
• Read the instructions before using the controller.
• Avoid heat build-up: do not obstruct air circulation.
• Do not connect drive battery with reversed polarity:
Incorrect polarity at the battery terminals will instantly
ruin the speed controller.
For this reason: • red wire to POSITIVE terminal (+),
• black wire to NEGATIVE terminal (-)
If you do not wish to solder the motor connections directly,
we recommend the use of MPX 6-pin connectors # 85213 /
85214 for connecting the controller / battery and motor /
controller.
• When soldering or working on the motor or controller:
Always disconnect the battery
(short-circuit / injury hazard).
• When test-running or operating the power system:
Do not hold the motor in your hand when running it; hold the
model securely. Check that there is ample space for the
propeller to rotate. Remove any object from the vicinity of
the propeller which could be sucked into it or blown away by
it (clothing, small items, paper etc.). Never stand in or in
front of the plane of rotation of the propeller (injury hazard).
PECIAL FEATURES
3. S
• BEC with low-voltage cut-off: (recommended up to max. 8
cells) with automatic cell count detection.
• Power-on guard: when you connect the drive battery, the
controller stays in power-on guard mode. The motor can
only be switched on if you move the throttle stick to the idle
position after connecting the battery. If not, the LED flashes.
• Overload protection: if the controller overheats or is
overloaded, the controller switches off the power supply to
the motor. To re-activate the system you must disconnect
the battery, then re-connect it.
• Over-voltage protection:
The controller switches off if the voltage is above 16 V.
ONNECTING THE CONTROLLER TO THE MOTOR
4. C
Note: to connect the controller soldering may be necessary.
Soldering requires a certain level of skill and care, as the
system will only work reliably if the joints are made well:
• use only a type of solder designed for electronic work
• do not use acid-based soldering flux
• do not over-heat parts or heat them for too long
• if you are not sure, ask an experienced modeller to help
1. Motor suppression:. if the motor you wish to use is not
supplied with factory-fitted suppressors, we strongly
-16 instructions # 72271
recommend that you fit the suppressor set, # 85020, to
avoid interference to the RC system.
MULTICont
MULTIPLEX Modellsport GmbH & Co. KG • Neuer Weg 2 • D-75223 Niefern • www.multiplex-rc.de
2. Solder the controller’s motor cables to the motor
The motor cables on the controller are marked “MOTOR”;
solder them to the drive motor:
usually with direct-drive motors: yellow Æ “+” ; blue Æ “-”
3. Check the direction of motor rotation
If the motor rotates in the wrong direction (e.g. with a
geared motor), swap over the cables at the motor
terminals.
SING THE CONTROLLER FOR THE FIRST TIME
5. U
1. Connect the controller’s servo connector (REC) to
the receiver.
MPX RC systems: to channel 4 = throttle / motor
2. If you have a programmable RC system, set the servo
travel for the throttle channel to 100% on both sides.
3. Move the throttle stick (and trim
) to the desired idle
end-point / motor OFF position.
4. Switch on the transmitter.
5. Connect the drive battery to the speed controller.
Caution: reversed polarity instantly wrecks the unit!
If the LED now flashes, the controller is in power-on guard
mode Æ disconnect the drive battery from the controller,
reverse the throttle channel at the transmitter (servo
reverse), then re-connect the drive battery Æ ready.
• Important:
• First switch the transmitter ON, then connect the
drive battery
If the LED flashes, the power-on guard is active Æ
move the throttle stick to idle Æ controller is ready!
• First disconnect the drive battery from the controller,
then switch the transmitter OFF.
6. BEC = B
ATTERY ELIMINATING CIRCUIT
BEC means: the receiver and servos draw current from the
drive battery. Do not use a separate receiver battery.
• Note: please note that the BEC circuit of the MULTIcont X-
16 can only supply a current of 1 A for the model’s receiving
system. In practice this means: with 7 cells max. 3 servos,
with 8 cells max. 2 servos; above 8 cells: do not use BEC.
The current drain varies according to the power of the servo,
the frequency of control use, and the stiffness of the control
surface linkages (!). If you have no means of measuring the
BEC current: carry out a test-run on the ground, and operate
the servos constantly until the low-voltage cut-off is triggered
(= flat drive battery). The servos should respond to the sticks
without hesitation or jitter throughout the test period, and the
controller should be no more than warm at the end of it.
If your model is fitted with more servos than stated, you must
disable the BEC circuit and use a separate receiver battery.
This is done by cutting through the red wire
(+) in the servo
lead attached to the speed controller.
OW VOLTAGE CUT-OFF
7. L
The MULTIcont X-16’s low-voltage cut-off circuit switches off
the drive motor when the drive battery is almost flat. This
ensures that there is still sufficient energy for the BEC
system, so that the model can be controlled to a safe
landing. A marked fall-off in motor speed is your warning that
the battery is almost discharged; start the landing approach
as soon as you detect this. If the battery voltage falls to 65%
of the idle voltage, the controller will switch off the motor.
However, you can switch the motor back on again for a short
period if you first move the throttle stick to the idle / motor
OFF position, then advance it again.
Page 35

RR # 26 4211
Prenda confidenza con il contenuto della scatola di montaggio!
Le scatole di montaggio MULTIPLEX sono soggette, durante la produzione, ad un continuo controllo della qualità e
siamo pertanto certi che Lei sarà soddisfatto con la scatola di montaggio. La preghiamo tuttavia, di controllare tutte le
parti prima del loro utilizzo (consultando la lista materiale), poiché le parti già lavorate non potranno più essere
sostituite. Se una parte dovesse risultare difettosa, saremo disposti, dopo un nostro controllo, alla riparazione o alla
sostituzione. La preghiamo di inviare la parte in questione al nostro reparto modellismo, allegando assolutamente lo
scontrino fiscale e una breve descrizione del difetto riscontrato.
Noi lavoriamo costantemente al miglioramento tecnico dei nostri prodotti. Cambiamenti nel contenuto della scatola di
montaggio, in forma, dimensioni, tecnica, materiali ed accessori, sono possibili in ogni momento e senza preavviso.
Per tutto quanto qui descritto, per i disegni e le foto, non si assumono responsabilità.
Attenzione!
Modelli radiocomandati, e specialmente aeromodelli, non sono giocattoli in senso stretto. La loro costruzione
e uso richiedono conoscenza tecnica, accuratezza nella costruzione, nonché disciplina e consapevolezza
dei rischi. Errori ed imprecisioni nella costruzione e nel funzionamento possono provocare danni a persone
e cose. Richiamiamo espressamente l’attenzione su questi pericoli, poiché non possiamo controllare il
corretto assemblaggio, la manutenzione ed il funzionamento dei nostri modelli.
Per il completamento del modello Mini Mag sono ulteriormente necessari:
Colla cianoacrilica con attivatore:
Usare colla cianoacrilica di media viscosità, assieme all’attivatore –
possono sembrare a prima vista ideali, in caso di sollecitazione, la colla si stacca facilmente dalle parti – l’incollaggio
è solo superficiale.
In alternativa si può anche usare colla a caldo!
non usare colla ciano per espanso! Colle epossidiche
I
Componenti RC MULTIPLEX per Mini Mag:
p.es. Ricevente PiCO 5/6 UNI 35 MHz A Art.nr. 5 5920
in alternativa 40 MHz Art.nr. 5 5921
o Ricevente Micro IPD UNI 35 MHz A Art.nr. 5 5971
in alternativa 40 MHz Art.nr. 5 5972
e opzionale
Servo NanoS UNI o HS 55 (necessari 2 pz.) Alettoni Art.nr. 6 5120
Prolunga 300 mm UNI 2x servi alettoni Art.nr. 8 5031
eventualmente cavo con filtri antidisturbo 200 mm UNI 2x servi alettoni Art.nr. 8 5035
Servo NanoS UNI o HS 55 (necessari 2 pz.) Alettoni Art.nr. 6 5120
e opzionale
MagicMixer #1 per radio a 3 canali prive di mixer Art.nr. 7 3000
Cavo a „V“ (UNI) per radio a 4 canali con comando separato del direzionale Art.nr. 8 5030
Pacchi batteria:
p.es. Pacco batteria MULTIPLEX Permabatt NiMh (AA-Mignon) 7/1500 mAh Art.nr. 15 6030
o Pacco batteria MULTIPLEX Permabatt NiMh (AA-Mignon) 8/1500 mAh Art.nr. 15 6037
o Pacco batteria MULTIPLEX Li-Batt (LiPo) P-CS 2 / 1-2000 mAh Art.nr. 15 7016
o Pacco batteria MULTIPLEX Li-Batt (LiPo) SH BX 2 / 1-2100 mAh Art.nr. 15 7130
Caricabatteria:
MULTIcharger LN-5014 DC (corrente di carica 100mA ...5A) 1-14 el. NiCd/NiMh Art.nr. 9 2531
e 1-5 elementi ai polimeri di litio
Opzionale
Set galleggianti Art.nr. 73 3069
Tuning 1: Set motorizzazione dell’Easy Glider (riduttore 3:1 con Permax 400) Art.nr. 33 2688
con mozzo elica Ø 3,5 Art.nr. 33 2310
ed elica 8 x 3,8 “ Art.nr. 73 3139
Tuning 2: Set motorizzazione “Sport” BL-X 22-18
Contiene: motore, mozzo elica, regolatore ed elica Art.nr. 33 2627
Attrezzi:
Forbice, taglierino, pinza e rispettivamente un cacciavite piccolo diritto ed uno a croce per squadrette dei servi e viti
fissaggio motore, eventualmente saldatore.
Nota: Per una più facile consultazione, staccate dal centro le pagine con i disegni!
35
Page 36

Dati tecnici:
Apertura alare 1010 mm
Lunghezza fusoliera sopra tutto 820 mm
Peso in ordine di volo da 580 g
Carico alare (FAI) da 26 g/dm²
Motorizzazione da Permax 400 6 V
Funzioni RC: elevatore, direzionale e motore
– alettoni opzionali
Nota importante
Questo modello non è in polistirolo™! Per questo
motivo
epoxy. Usare esclusivamente colla cianoacrilica,
possibilmente assieme all’attivatore (Kicker). Per tutti
gli incollaggi usare colla ciano di media viscosità.
Con il materiale Elapor® spruzzare sempre su una
superficie l’attivatore (Kicker) – fare asciugare e
quindi applicare sulla superficie opposta la colla
ciano. Unire e allineare immediatamente le parti.
Attenzione quando si lavora con la colla cianoacrilica!
Questo tipo di colla asciuga in pochi istanti; in nessun
caso applicare sulle dita o su altre parti del corpo.
Proteggere assolutamente gli occhi con occhiali di
protezione adeguati! Tenere lontano dalla portata dei
bambini!
1. Prima di cominciare
Controllare il contenuto della scatola di montaggio,
consultando le fig. 1+2 e la lista materiale.
I disegni necessari alla costruzione del modello RR sono
contrassegnati con RR+KIT, mentre i disegni contrassegnati
solo con KIT sono utili nel caso in cui si renda necessario
riparare il modello con parti di ricambio.
2. Aprire e chiudere la capottina
Per aprire la capottina, afferrarla sulla parte anteriore e
sollevarla.
Per chiuderla, infilare completamente la linguetta posteriore
e abbassarla.
Montaggio finale
3. Opzione – ruotino di coda
Chi vuole può equipaggiare il modello anche con un ruotino
di coda. Questo è necessario se si vuole installare
successivamente i galleggianti. In questo caso è
indispensabile il montaggio di un timone di „navigazione“
che può essere montato solo se il modello dispone di un
ruotino di coda. Per le singole fasi di costruzione vedi le
Fig. 09 -13.
Piegare i tondini come indicato in Fig.12+12a. Il tondino
d’acciaio 47 ha un diametro di 1,3 mm – il tubo 35 è anche
allegato.
Montaggio:
Praticare un foro attraverso il piano di coda e la fusoliera
come da Fig. 11. Scegliendo questa opzione, tagliare il
„pattino“ posteriore in espanso e praticare sul direzionale
una scanalatura per fissare il tondino di rinvio. Fig.10
Incollare il tubo 35 con colla ciano e accorciarlo se
necessario. Piegare la parte superiore del tondino 47 solo
dopo averlo inserito nel tubo 35.
non usare per gli incollaggi colla vinilica o
Ancora un’opzione
Se si intende installare i galleggianti, costruire un timone
di navigazione con Depron da 3 mm e fissarlo con nastro
adesivo (Tesa) nel tondino piegato. Il fissaggio avviene con
due collari sul tondino del ruotino di coda. Le parti sono
contenute nella scatola di montaggio dei galleggianti.
4. Installare il motore
La motorizzazione standard Permax 400 è già installata.
Naturalmente è anche possibile l’installazione successiva
di motori più potenti.
Noi consigliamo due tipi di motorizzazione.
A. Standard - Permax 400 G con riduttore 3:1. Fig. 20
Motorizzazione dell’Easy Glider E
(riduttore 3:1 con Permax 400) # 33 2688
con mozzo elica Ø 3,5 mm # 33 2310
ed elica 8 x 3,8 “ # 73 3139
B. Motorizzazione „Sport“ BL-X 22-18 # 33 2627
il set contiene il regolatore, il mozzo elica e l’elica
5. Collegare il motore
Per prova accendere il motore! Vista da davanti, l’elica
deve girare sempre in senso antiorario, se necessario
invertire la polarità sul motore.
6. Rendere mobile l’elevatore ed il direzionale
Per rendere mobili l’elevatore ed il direzionale, piegarli a
destra/sinistra per qualche volta – in nessun caso staccarli
o tagliarli! Fig. 25 + 27
7. Incollare i piani di coda sulla fusoliera
Posizionare prima senza colla, il piano di quota sulla
fusoliera e controllare che tutto combaci perfettamente.
Fare particolare attenzione che l’elevatore 7 poggi
perfettamente sulla fusoliera, in linea con la superficie
d’appoggio alare. Per facilitare l’allineamento, installare le
ali. Quando tutto combacia, incollare l’elevatore e
controllare nuovamente l’allineamento e l’appoggio perfetto
sulla fusoliera!
Ancora senza colla, posizionare il direzionale sulla
fusoliera e sul piano di coda e controllare che tutto combaci
perfettamente, in particolare che poggi perfettamente sulla
fusoliera/piano di coda. Controllare inoltre che il direzionale
8 si trovi esattamente a 90° con il piano d’appoggio alare e
con il piano di coda, p.es. con un goniometro.
Fig. 30
8. Collegare i rinvii dell’elevatore e del direzionale
Inserire le estremità dei tondini 41 e 42 nei raccordi 25 –
portare i servi ed i timoni in posizione neutrale ed avvitare
i grani 28. Se necessario piegare leggermente la parte
esterna dei tondini.
Fig. 31-32
9. Montare il carrello
Premere leggermente il carrello già pronto sui lati ed
agganciarlo al supporto 74. Installare vite 75.
Fig. 34
36
Page 37

Opzione alettoni
Se Lei desidera volare con un modello comandato su due
assi (direzionale / elevatore) saltare i punti 10 – 14 Abb.36-
39 e coprire successivamente le aperture per i servi alari
con i decals previsti.
Con lo stesso diedro alare, il modello vola in modo perfetto
sia in configurazione due, che tre assi. Naturalmente è
anche possibile l’installazione successiva degli alettoni.
16. Installare l’impianto radio
Nell’area della capottina, installare adesso tutti i
componenti RC mancanti ed il pacco batteria.
Per il posizionamento tenere conto del baricentro indicato
in Fig. 43.
Lo spazio è sufficiente per l’installazione di diversi tipi di
pacchi batteria. Se non dovesse essere possibile bilanciare
il modello spostando il pacco batteria, applicare piombo
di bilanciamento
.........................................................
Se si vuole volare con l’ausilio degli alettoni (tre assi),
consultare le istruzioni riportate di seguito:
10. Rendere mobili gli alettoni + installare i servi alari
Sull’ala 6 tagliare lateralmente gli alettoni - renderli mobili,
piegandoli a destra/sinistra per qualche volta – in nessun
caso staccarli o tagliarli!
Fig. 36
11. Installare i servi alari
Portare i servi in posizione neutrale ed installare le
squadrette a 90°, in modo che sporgano lateralmente dal
servo -1x destra, 1x sinistra.
Inserire i servi nelle rispettive aperture dell’ala 6. A seconda
dei servi usati, potrebbero essere necessari piccoli lavori
di ritocco. Per fissare i servi, applicare rispettivamente una
goccia di colla a caldo nelle scanalature per le linguette
ed inserire immediatamente il servo – eventualmente
ritoccare ancora successivamente con colla a caldo.
Fig. 37
12. Posizionare i cavi dei servi alari
Posizionare i cavi, con la parte stretta del cavo rivolta verso l’alto, in direzione del centro alare e poi verso l’apertura
centrale per la baionetta. I cavi devono sporgere dall’ala di
ca. 120 mm in modo da raggiungere con facilità la ricevente,
eventualmente allungarli. Fissare i cavi al centro dell’ala
con una goccia di colla a caldo.
13. Fissare le squadrette sugli alettoni
Inserire rispettivamente un raccordo 25 nel foro più esterno
delle squadrette 24 e fissarlo con una rondella 26 ed un
dado 27. Attenzione: 1x destra, 1x sinistra! Serrare
attentamente il dado e bloccarlo con una goccia di colla
ciano o vernice (applicare con un ago). Avvitare quindi il
grano 28 con la chiave a brugola 29 nel raccordo 25. Con
colla ciano, incollare le squadrette 24, con i fori rivolti verso
la “cerniera”, nelle rispettive aperture. Spruzzare prima sulle
aperture l’attivatore.
Fig. 38
14. Installare i rinvii per gli alettoni
Agganciare la “Z” dei tondini d’acciaio 30 nel foro più interno
della squadretta del servo ed infilare l’estremità opposta
attraverso il raccordo 25. Portare il servo ed il timone in
posizione neutrale ed avvitare il grano 28.
Fig. 39
.........................................................
Per fissare i componenti RC all’interno della fusoliera, usare
il velcro 20+21 allegato (parte uncinata/stoffa). La colla
del velcro non sempre aderisce a sufficienza sull’espanso.
Per questo motivo incollare ulteriormente la parte di velcro
nella fusoliera con colla ciano.
Posizionare la ricevente in posizione verticale, dietro al
supporto di fissaggio dell’ala. Passare l’antenna verso
l’esterno e fissarla con nastro adesivo sotto alla fusoliera.
La parte rimanente può pendere liberamente dalla parte
posteriore della fusoliera.
Il motore allegato è già provvisto di filtri antidisturbo interni.
Questi filtri sono più che sufficienti utilizzando il regolatore
MULTIcont X-16 # 7 2271.
Con un regolatore diverso, è consigliabile saldare dei filtri
supplementari (set filtri antidisturbo # 8 5020). Saldare a
tale proposito rispettivamente un condensatore da 47 nF
fra ogni polo di collegamento del motore e la scatola del
motore ed uno fra i due poli.
Installare l’elica
Prima di effettuare la prima prova del motore, installare
l’elica. In ogni caso assicurarsi che l’elica sia fissata
saldamente sull’albero motore. L’ogiva e l’elica devono
essere fissati con colla ed incollati infine sull’albero motore
(prima dell’incollaggio, irruvidirlo con carta vetrata). Con
elica Günther usare colla epoxy 5 minuti e con eliche MPX
colla ciano.
Una volta collegati i cavi, si può provare per la prima volta
il motore – in ogni caso accertarsi che la colla sia asciutta.
Collegare il connettore pacco batteria / regolatore
solo con radio accesa e dopo essersi assicurati che
lo stick di comando del motore sulla radio si trovi in
posizione „MOTORE SPENTO“.
Accendere la radio e collegare il pacco batteria al regolatore
ed il regolatore alla ricevente. E’ indispensabile che il
regolatore disponga della cosiddetta funzione BEC
(alimentazione dell’impianto RC dal pacco batteria).
Accendere per un attimo il motore e controllare ancora
una volta il senso di rotazione dell’elica (tenere saldamente
il modello e togliere da dietro il modello qualsiasi oggetto
leggero).
Attenzione: anche con piccoli motori elettrici ed
eliche ci si può ferire seriamente!
15. Fissare l’ala sulla fusoliera con la vite 32. Fig. 40
37
Page 38

17. Regolare le corse dei timoni
Per ottenere un comportamento di volo equilibrato è
importante regolare correttamente le corse dei timoni. Le
corse devono essere misurate sempre nel punto più largo
dei timoni.
Cavo a “V” per servi alettoni (opzionale) # 8 5030
Il cavo a “V” permette di usare una semplice radio a 4
canali senza funzioni di miscelazione.
I due servi alettoni vengono comandati con l’ausilio del
cavo a “V” con
un solo canale.
Elevatore
verso l’alto - stick in dietro - ca. + 11mm
verso il basso - stick in avanti - ca. – 11 mm
Direzionale
a destra e sinistra rispettivamente ca. 6-10 mm
Alettoni
verso l’alto ca. + 7 mm
verso il basso ca. – 3 mm
MagicMixer #1(opzionale) # 7 3000
Il MagicMixer #1 permette di usare semplici radio prive di
funzioni di miscelazione. Per il MINI MAG è sufficiente
una radio a 3 canali.
Senza il MagicMixer #1 sarebbe necessaria almeno una
radio a 4 canali computerizzata e con funzione di
miscelazione.
Il MiniMag può quindi essere fatto volare anche con una
radio più semplice, come p.es. Ranger III (dalla scatola di
montaggio EasyStar o SpaceScooter RTF).
Con un solo canale (uscita destra / sinistra), il modulo è in
grado di comandare
due servi alettoni ed il direzionale.
Attenzione: La differenziazione degli alettoni deve avvenire
in modo meccanico. Posizionare a tale proposito le
squadrette dei servi di tre denti in avanti. Questo deve
avvenire prima di installare i servi nelle ali. In questa
configurazione, il direzionale viene comandato da un canale
separato.
Radio computerizzata
Con questo tipo di radio il MagicMixer #1 ed il cavo a “V”
sono superflui!
In questo caso la radio deve permettere le seguenti
impostazioni:
- Differenziazione degli alettoni
- Reverse dei servi (inversione del senso di rotazione)
- Impostazione della corsa dei servi
- eventualmente Combi-Switch (miscelazione alettoni /
direzionale)
Nota: Con alettoni a destra, l’alettone di destra, visto
in direzione di volo, si muove verso l’alto.
Se la Sua radio non permette di regolare i valori
riportati sopra, collegare i rinvii ad un foro più esterno/
interno delle squadrette.
I servi vengono comandati in modo tale da ottenere sempre
le giuste escursioni. Nel MagicMixer #1 la miscelazione
del direzionale in alettoni (“Combi-Switch”) è già
preimpostata.
Differenziazione alettoni significa che l’escursione verso
l’alto degli alettoni è maggiore di quella verso il basso. In
questo modo si contrasta la rotazione indesiderata del
modello attorno all’asse verticale.
Con il MagicMixer #1 sono necessari almeno i seguenti
canali:
Canale 1: alettoni, con miscelazione direzionale (3 servi)
Canale 2: elevatore (1 servo)
Canale 3: motore (1 regolatore)
Collegare i cavi dei servi alettoni come descritto nelle
istruzioni allegate al “MagicMixer”. Controllare che la
polarità sia corretta. Lo spina dell’impulso è contrassegnata
sull’etichetta del MagicMixer con il segno “impulso”. I cavi
di collegamento per l’impulso sono in genere di colore giallo
o arancione.
Collegamento MagicMixer #1:
r / l = all’uscita della ricevente per destra/sinistra
AR = al servo alettone destro
AL = al servo alettone sinistro
R = al servo del direzionale
18. Ancora qualche cosa per l’estetica
La scatola di montaggio contiene dei decals multicolore.
Ritagliare le scritte e gli emblemi ed incollati come indicato
sulle foto della scatola di montaggio o secondo i propri
gusti. Per la versione senza alettoni, coprire le aperture
per i servi alari con i rispettivi decals.
19. Bilanciare il modello
Il Suo Mini Mag, come ogni altro aereo, deve anche essere
bilanciato su un punto prestabilito, per ottenere delle doti
di volo stabili. Per effettuare il bilanciamento, montare il
modello e posizionare il pacco batteria.
Il baricentro si trova sotto all’ala, a 67 mm dal bordo
d’entrata, vicino alla fusoliera – qui ci sono già dei
contrassegni che indicano la posizione del baricentro.
Sollevando il modello in questo punto con le dita, dovrebbe
rimanere in posizione orizzontale. Eventuali correzioni
possono essere fatte, spostando il pacco batteria. Una
volta bilanciato il modello, segnare la posizione del pacco
batteria, in modo da poterlo sempre posizionare nello
stesso punto. Se non dovesse essere possibile bilanciare
il modello spostando il pacco batteria, usare del piombo.
Fig. 43
20. Preparativi per il primo volo
Per il primo volo è consigliabile scegliere una giornata priva
di vento. Particolarmente indicate sono spesso le ore serali.
Con la funzione “Reverse”, impostare adesso sulla radio il
giusto senso di rotazione dei servi.
38
Prima del decollo, effettuare assolutamente un test
di ricezione dell’impianto RC!
Page 39

Le batterie della radio e del modello devono essere caricate
secondo le prescrizioni. Prima d’accendere la radio,
accertarsi che il canale usato sia libero.
Un aiutante si allontana con la radio e muove
costantemente uno stick di comando; l’antenna della radio
deve essere inserita completamente. Controllare i servi. Il
servi che non vengono mossi, devono rimanere fermi fino
ad una distanza di ca. 60 m, mentre quello che viene
comandato con lo stick, deve muoversi normalmente, senza
ritardi. Questo test deve essere effettuato solo quando non
ci sono altre radio accese,
quando non ci sono interferenze sulla propria banda di
frequenza! Il test deve essere ripetuto con il motore acceso.
La distanza di ricezione deve rimanere pressoché uguale.
Non decollare assolutamente se dovessero sorgere dei
problemi. In questo caso fare controllare la radio (con
batterie, interruttore, servi) dalla ditta produttrice.
Primo volo ...
Non lanciare il modello con il motore spento!
Lanciare il modello (sempre controvento).
Per il primo volo consigliamo di farsi aiutare da un
modellista esperto.
Una volta raggiunta una quota di sicurezza, regolare i trim
in modo che il modello voli diritto.
neanche su altri canali, e
21. Sicurezza
La sicurezza è l’elemento essenziale quando si vola con
modelli radioguidati. Stipulare assolutamente
un’assicurazione. Per i soci dei club questa viene stipulata
normalmente dall’associazione stessa per tutti i soci. Fare
attenzione che la copertura assicurativa sia sufficiente
(aeromodello con motore).
Tenere i modelli ed il radiocomando sempre in perfetta
efficienza. Informarsi su come caricare correttamente le
batterie. Fare uso di prodotti che migliorano la sicurezza.
Nel nostro catalogo generale MULTIPLEX si possono trovare
tutti i prodotti più adatti, sviluppati da modellisti esperti.
Volare sempre in modo responsabile! Volare a bassa quota,
sopra la testa degli altri non significa essere degli esperti,
i veri esperti non ne hanno bisogno. Nell’interesse di tutti
noi si faccia presente questo fatto anche agli altri modellisti.
E’ importante volare sempre in modo da non mettere in
pericolo ne i colleghi modellisti, ne gli spettatori. Si prenda
in considerazione che anche il migliore radiocomando può
essere soggetto, in ogni momento, ad interferenze esterne.
Anche anni d’esperienza, senza incidenti, non sono una
garanzia per il prossimo minuto di volo.
Noi, il Suo team MULTIPLEX , Le auguriamo tanta
soddisfazione e successo nella costruzione e più tardi
nel far volare questo straordinario modello.
Ad una quota di sicurezza, prendere confidenza con le
reazioni del modello, anche con il motore spento. In quota,
simulare avvicinamenti per l’atterraggio, per essere pronti
quando la batteria sarà scarica.
Durante i primi voli, cercare, specialmente durante
l’atterraggio, di evitare curve troppo accentuate a poca
distanza da terra. Atterrare in modo sicuro, evitando manovre
rischiose.
MULTIPLEX Modellsport GmbH &Co. KG
Reparto assistenza prodotti e sviluppo
Klaus Michler
39
Page 40

Lista materiale MiniMag # 26 4211
Pos.Pz. Descrizione Materiale Dimensioni
1 1 Istruzioni di montaggio RR Carta DIN-A4
2 1 Decals Foglio adesivo stampato 400 x 700mm
3 1 Fusoliera finita con capottina
2 servi e motore con regolatore installati Elapor espanso Finito
6 1 Semiali finite per comando su 2 assi Elapor espanso Finito
7 1 Piano di quota con squadretta
e raccordo installati Elapor espanso Finito
8 1 Direzionale con squadretta
e raccordo installati Elapor espanso Finito
Minuteria
20 2 Velcro parte uncinata Materiale plastico 25 x 60 mm
21 2 Velcro parte „stoffa“ Materiale plastico 25 x 60 mm
24 2 Squadretta timone Materiale plastico stampato Finito
25 2 Raccordo per rinvii Metallo Finito Ø6mm
26 2 Rondella Metallo M2
27 2 Dado Metallo M2
28 2 Grano a brugola Metallo M3 x 3mm
29 1 Chiave a brugola Metallo SW 1,5
30 2 Rinvio per alettoni con „Z“ Metallo Ø1 x 70mm
32 1 Vite Materiale plastico M5 x 50mm
35 1 Guaina bowden Materiale plastico 3 x 2 x 90 mm
47 1 Tondino acciaio Metallo 1,3 x 250 mm
52 1 Elica Materiale plastico 5,0 x 4,0”
75 1 Vite Metallo M3 x 12mm
Carrello
70 1 Carrello principale con 2 ruote Ø 53mm Metallo / materiale plastico Finito
Istruzioni e film su CD
80 1 Istruzioni e film su CD
A B
Auftriebskraft
C
α
E
X
D
40
F
Page 41

Nozioni fondamentali
Come ogni aereo, anche gli aeromodelli, possono muoversi, grazie ai timoni, intorno ai seguenti 3 assi – d’imbardata, di
beccheggio e di rollio. Il movimento dell’elevatore fa variare la direzione di volo attorno all’asse di beccheggio. Muovendo il
direzionale, il modello gira sull’asse d’imbardata. Il diedro alare del nostro EasyStar rende superflui gli alettoni. In questo caso,
il modello viene comandato con il direzionale attorno all’asse d’imbardata
turbolenze, possono far variare la traiettoria del modello. Il pilota deve quindi intervenire per fare in modo che il modello voli nella
direzione voluta. Con l’aiuto del motore (motore, elica) è possibile variare la quota del modello. I giri del motore vengono, nella
maggior parte dei casi, regolati da un regolatore elettronico. E’ importante sapere, che tirando l’elevatore, il modello sale fino a
quando viene raggiunta la velocità minima. Più il motore è potente, più è grande l’angolo di cabrata.
e quella di rollio. Influenze esterne, quali p.es.
Semiala
sinistra
asse d’imbardata
Capottina
asse di rollio
Il profilo alare
L’ala ha un profilo asimmetrico (curvo), sul quale scorre l’aria.
L’aria deve percorrere, nello stesso arco di tempo, una distanza
maggiore sulla parte superiore dell’ala, che sulla quella
inferiore. In questo modo si genera una depressione sulla
parte superiore che tiene l’aereo in aria (portanza). Fig. A
Il baricentro
Il Suo modello, come ogni altro aereo, deve essere bilanciato,
per ottenere delle doti di volo stabili. Prima di effettuare il primo
volo, è indispensabile bilanciare il modello.
Il baricentro si trova sotto al profilo alare, e viene misurato
partendo dal bordo d’entrata dell’ala (in prossimità della
fusoliera). Il modello viene sollevato in questo punto con le
dita o meglio con la bilancia per baricentro MPX # 69 3054, e si
deve portare in posizione orizzontale. Fig. B
Eventuali correzioni possono essere fatte, spostando i
componenti RC (p.es. il pacco batteria). Se questo non
dovesse essere sufficiente, si può inserire e fissare nella punta
della fusoliera o sulla parte posteriore, la quantità necessaria
di piombo. Se il modello tende a cabrare, aggiungere piombo
nella punta, se tende a picchiare nella parte posteriore della
fusoliera.
L’incidenza indica la differenza in gradi fra la posizione del
piano di quota e dell’ala. Per ottenere la giusta incidenza, è
indispensabile installare l’ala ed il piano di quota sulla
fusoliera, in modo che combacino perfettamente con i piani
d’appoggio.
Direzionale
Piano di quota
asse di beccheggio
Fusoliera
timone
elevatore
Semiala
destra
I
Una volta effettuate con precisione queste due regolazioni
(baricentro e incidenza), non ci saranno sorprese durante il
volo. Fig. C
Timoni ed escursioni
I timoni si devono muovere con facilità e nella giusta direzione.
Le escursioni devono essere inoltre regolate come indicato
nelle istruzioni di montaggio. Queste escursioni sono state
determinate in volo, durante le nostre prove di volo, e si
consiglia di adottarle anche sul proprio modello. Eventuali
modifiche possono comunque essere fatte in un secondo
tempo.
La radio
Sulla radio ci sono due stick, che fanno muovere i servi e di
conseguenza anche i timoni del modello.
La posizione delle singole funzioni è indicata per Mode A –
altre posizioni sono possibili.
I seguenti timoni possono essere mossi con la radio:
il direzionale (sinistra/destra) Fig. D
l’elevatore (cabrare/picchiare) Fig. E
il motore (motore spento/acceso) Fig. F
Lo stick del motore non deve scattare in posizione centrale
una volta rilasciato, ma deve rimanere fermo sull’intera corsa.
Per effettuare la necessaria regolazione, consultare il manuale
d’istruzione della radio.
41
Page 42

Regolatore MULTIcont X-16 # 7 2271
X
! Queste istruzioni sono parte integrante del prodotto e
contengono informazioni importanti. Per questo motivo è
indispensabile conservarle con cura e, in caso di vendita del
prodotto, di consegnarle all’acquirente.
ATI TECNICI
1. D
MULTIcont X-16
Numero elementi NiCd/NiMh 6-8 / 2 celle Lipoly
Corrente continua 16 A
Frequenza di lavoro ~ 6 kHz
Alimentazione impianto RC (BEC):
Tensione BEC 5 V
Corrente BEC max. 1 A
Perdita del circuito BEC max. 2,5 W
Dimensioni (s. cavi) 27x20x8 mm
Peso con cavo 17g
2. A
VVERTENZE
• Prima di mettere in funzione leggere le istruzioni
• Evitare il surriscaldamento: non ostacolare il ricircolo
d’aria attorno al regolatore.
• Non collegare il pacco batteria con polarità invertita:
Il collegamento con polarità invertita, danneggia
immediatamente il regolatore.
Per questo motivo: • cavo rosso al polo POSITIVO ( + ),
• cavo nero al polo NEGATIVO ( - )
Per i collegamenti regolatore/pacco batteria e
motore/regolatore (se il regolatore non viene saldato
direttamente sul motore) si consiglia di usare dei connettori
MPX a 6 poli # 85213/85214.
• Se si devono effettuare delle saldature sul motore o
regolatore: Scollegare sempre il pacco batteria (pericolo di
cortocircuiti o di ferirsi!)
• Durante il funzionamento:
Non tenere il motore in mano; fissare saldamente il modello.
Controllare che ci sia spazio a sufficienza per permettere la
rotazione dell’elica. Togliere dalla vicinanza dell’elica tutti gli
oggetti che potrebbero volare via o essere risucchiati (vestiti,
minuteria, carta, ecc.). In nessun caso stare davanti o ai lati
dell’elica in movimento (ci si può ferire!).
3. C
ARATTERISTICHE
• BEC con disinserimento bassa tensione (consigliato con max.
8 elementi) e adattamento automatico al numero di elementi.
• Protezione avviamento accidentale: Questa funzione evita
che il motore parta improvvisamente quando si collega il pacco
batteria. Il LED lampeggia fino a quando lo stick motore non
viene portato per un attimo al minimo. Solo adesso il motore è
“attivo“.
• Protezione sovraccarico: In caso di surriscaldamento o
sovraccarico, il regolatore disattiva il motore. Per riattivarlo
scollegare e ricollegare il pacco batteria al regolatore.
Protezione sovratensione
Con tensione >16 V il regolatore si disattiva.
4. C
OLLEGARE IL REGOLATORE
Nota: Per collegare il regolatore sono eventualmente necessari
lavori di saldatura che richiedono un minimo di accuratezza, per
garantirne un funzionamento sicuro:
• usare solo stagno per saldatura su elettronica
• non usare stagno con contenuto di acidi
• le parti da saldare devono essere scaldate in modo sufficiente
ma non eccessivo
• eventualmente farsi aiutare da qualcuno che abbia esperienza
nella saldatura
-16# 72271
1. Filtri antidisturbo: Se il motore usato non è provvisto di filtri
antidisturbo, usare assolutamente il set antidisturbo # 85020 per
evitare interferenze all’impianto RC.
2. Collegare il regolatore al motore
Saldare i cavi contrassegnati con „MOTOR“, al motore:
normalmente con motorizzazioni dirette: giallo Æ „+“ ; blu Æ
„-“
3. Controllare il senso di rotazione del motore
Per invertire il senso di rotazione del motore (p.es. con l’uso
di riduttori), saldare i cavi sul motore con polarità invertita.
UNZIONAMENTO
5. F
1. Collegare il cavo di collegamento (BEC) alla ricevente
(Con radiocomandi MULTIPLEX al canale 4 = gas/motore)
2. Con radiocomandi programmabili, impostare la corsa del
servo gas/motore in entrambe le direzioni a 100%.
3. Portare lo stick motore (e se necessario anche la rispettiva
leva del trim!) in posizione motore al minimo/SPENTO.
4. Accendere la radio
5. Collegare il pacco batteria al regolatore
Attenzione: il collegamento con polarità invertita
danneggia immediatamente il regolatore!
Con LED lampeggiante il regolatore si trova in modalità
protezione avviamento accidentale Æ scollegare il pacco
batteria dal regolatore, invertire il canale gas/motore (reverse) e
ricollegare il pacco batteria Æ il regolatore è pronto per l’uso.
• Importante:
• ACCENDERE prima la radio, poi collegare il pacco batteria
Se il LED lampeggia è attiva la funzione protezione
avviamento accidentale Æ portare lo stick motore al
minimo Æ il regolatore è pronto per l’uso!
• Scollegare prima il pacco batteria, poi SPEGNERE la radio
6. BEC = B
ATTERY ELIMINATING CIRCUIT
BEC significa: la ricevente ed i servi vengono alimentati dal
pacco batteria. Non collegare un’ulteriore batteria per la
ricevente.
• Nota: Il circuito BEC del MULTIcont X-16 é in grado
d’alimentare l’impianto RC del modello con una corrente
massima di 1 A. In pratica questo significa: con 7 elementi max. 3
servi, con 8 elementi max 2 servi, con più di 8 elementi non usare
l’alimentazione BEC.
Il consumo di corrente dipende dal tipo di servi, intensità di
movimento dei servi e dalla facilità di movimento dei
timoni/rinvii (!). Se non si ha la possibilità di misurare la corrente
BEC, effettuare un controllo a terra: muovere continuamente i
servi fino al disinserimento bassa tensione (= pacco batteria
scarico). Il regolatore non deve scaldarsi eccessivamente ed i
servi devono funzionare correttamente per tutta la durata del
controllo!
Se nel modello ci sono più servi, si deve interrompere
l’alimentazione BEC ed installare un’ulteriore batteria Rx. In
questo caso interrompere il filo rosso (+)
del cavo che collega il
regolatore alla ricevente.
ISINSERIMENTO BASSA TENSIONE
7. D
Il disinserimento bassa tensione del MULTIcont X-16, ferma il
motore con pacco batteria quasi scarico. In questo modo è
garantita l’alimentazione dell’impianto RC attraverso il circuito
BEC, per permettere un atterraggio sicuro. La riduzione del
numero di giri del motore, indica che il pacco batteria è quasi
scarico. In questo caso apprestarsi ad atterrare. Quando il pacco
batteria raggiunge una tensione del 65% rispetto a quella
iniziale, il regolatore ferma il motore. Il motore può essere
comunque riavviato per un breve periodo, riportando lo stick del
motore al minimo e poi dando nuovamente motore.
Istruzioni MULTICont
MULTIPLEX Modellsport GmbH & Co. KG • Neuer Weg 2 • D-75223 Niefern • www.multiplex-rc.de
Page 43

RR # 26 4211
¡Familiarícese con el kit!
Los kits de MULTIPLEX durante su producción, están sujetos a un continuo control de los materiales. Esperamos que
este satisfecho con su kit.. Aun así, le rogamos, que compruebe que todas las piezas (según la lista de componentes)
están incluidas antes de empezar a montar, ya que cualquier pieza que haya sido manipulada no podrá
cambiarse. En caso de que en alguna ocasión una pieza esté defectuosa estaremos encantados de corregir el
defecto o reemplazar la pieza ,una vez realizadas las comprobaciones pertinentes. Por favor, envíe la pieza a nuestro
departamento de construcción de modelos incluyendo sin falta la factura de compra y una breve descripción del
defecto.
Trabajamos constantemente en la evolución técnica de nuestros modelos. Nos reservamos el derecho de modificar el
contenido del kit de construcción, tanto en su forma como en su tamaño, técnica, material o equipamiento en cualquier
momento y sin previo aviso. Les rogamos que comprendan, que no se pueden hacer reclamaciones basándose en los
datos, texto o imágenes, de este manual..
¡Atención!
Los modelos radio controlados, especialmente los aviones, no son juguetes en el sentido habitual. Su
construcción y su uso requiere unos conocimientos técnicos, una construcción esmerada, así como disciplina
y sentido de la responsabilidad. Errores o descuidos durante la construcción y su posterior vuelo pueden
conllevar a daños personales y materiales. Dado que el fabricante no tiene ninguna influencia sobre la
correcta construcción, cuidado y uso, advertimos especialmente acerca de estos peligros
Además, necesitará para el Mini Mag:
Pegamento instantáneo con su correspondiente activador: Use pegamento instantáneo de viscosidad media
(cianocrilato) con activador. ¡No use pegamento instantáneo para Styropor! Los pegamentos Epoxy, producen una
unión resistente pero sólo a primera vista, una vez endurecido y al ser sometido a tensiones, se despegará de las
piezas. La unión es sólo superficial. ¡Como alternativa, puede usar silicona termo-fusible!
E
Equipo RC MULTIPLEX para el Mini Mag:
Receptor PiCO 5/6 UNI 35 MHz P.Ej. Banda-A Num.Ped. 5 5920
alternativa 40 MHz Num.Ped. 5 5921
o Receptor Micro IPD UNI 35 MHz P.Ej. Banda-A Num.Ped. 5 5971
alternativa 40 MHz Num.Ped. 5 5972
y opcionalmente
Servo NanoS UNI o HS 55 (Necesitará 2) Alerones Num.Ped 6 5120
Cable prolongador de servos 300 mm UNI 2x Servos de alerones Num.Ped. 8 5031
si lo cree necesario, cable con ferritas 200 mm UNI 2x Servos de alerones Num.Ped 8 5035
como opción
MagicMixer #1 para emisoras de 3 canales sin mezclas Num.Ped 7 3000
Cable en V (UNI) para emisoras de 4 canales con dirección independiente Num.Ped 8 5030
Baterías para el motor:
P.Ej. Batería MULTIPLEX Permabatt NiMh (AA-Mignon) 7 / 1500 mAh Num.Ped. 15 6030
o Batería MULTIPLEX Permabatt NiMh (AA-Mignon) 8 / 1500 mAh Num.Ped. 15 6037
o Batería MULTIPLEX Li-Batt (LiPo) P-CS 2 / 1-2000 mAh Num.Ped 15 7016
o Batería MULTIPLEX (LiPo) SH BX 2 / 1-2100 mAh Num.Ped 15 7130
Cargador:
MULTIcharger LN-5014 DC (Int. de carga 100mA ...5A) 1-14 Elem NiCad/NiMH Num.Ped 9 2531
y 1-5 Elem. LiPos
Opciones
Kit de flotadores Num.Ped 73 3069
Tuning 1: Motorización del Easy Glider (Reductora 3:1 con Permax 400) Num.Ped 33 2688
con porta-palas Ø 3,5 Num.Ped 33 2310
y hélice 8 x 3,8 “ Num.Ped 73 3139
Tuning 2: Kit de propulsión „Sport“ BL-X 22-18
Contiene: Motor, porta-palas, regulador y hélice Num.Ped 33 2627
Herramientas:
Tijeras, alicates, cuchilla, y destornilladores pequeños de estrella y planos para los tornillos de los servos y del
motor, si fuese necesario, estaño.
Aviso: ¡Separe las ilustraciones del cuadernillo central!
43
Page 44

Características técnicas:
Envergadura 1010 mm
Longitud total. 820 mm
Peso a partir de 580 g
Carga alar (FAI) a partir de 26 g/dm²
Motorización, desde Permax 400 6 V
Funciones RC Profundidad, dirección y control del motor
Opcionalmente, alerones
Advertencia importante
¡Este modelo no es de Styropor ™! Por este motivo
no es posible pegar con cola blanca o Epoxy. Utilice
solamente pegamentos a base de cianocrilato,
preferiblemente con un activador (Kicker). Utilizar
para todas las uniones pegamentos de cianocrilato
de viscosidad media. Al trabajar con Elapor®, rocíe
siempre uno de los lados con activador (Kicker),
dejándolo secar hasta que se evapore por completo,
y aplique en el otro lado pegamento a base de
cianocrilato. Unir ambas partes y llevar
inmediatamente a la posición correcta.
Cuidado al trabajar con pegamentos a base de
cianocrilato. Este pegamento fragua en cuestión de
segundos, y por este motivo no debe entrar en contacto
con los dedos u otras partes del cuerpo. Tenga mucho
cuidado al trabajar con cianocrilato. Este pegamento
fragua en segundos, no permita que entre en contacto
con sus dedos o cualquier parte de su cuerpo. ¡Use
gafas para proteger sus ojos! ¡Manténgalo lejos del
alcance de los niños!
1. Antes del montaje
Compruebe el contenido de su kit.
Le serán muy útiles la lista de componentes y las
ilustraciones Img. 1+2.
Para el montaje de su modelo RR, las ilustraciones
señaladas como RR+KIT son cruciales. Aquellas que solo
llevan el rótulo KIT le serán muy útiles en caso de reparación
o sustitución de piezas.
2. Abrir y cerrar la cabina
Para abrir la cabina, tómela por su parte delantera y tire
hacia arriba.
Para cerrarla, introduzca primero las pestañas traseras,
deslizando la cabina hacia la cola y presionando hacia
abajo, hasta que encaje.
Finalización del montaje
3. Rueda de cola, opcional
Si lo desea, puede equipar su modelo con una rueda en el
patín de cola. Esto también es conveniente si se dispone
a utilizar flotadores más adelante. Se hace necesario usar
un timón en el agua para controlar el modelo a baja
velocidad y para ello se necesita la varilla del patín de
cola. Las Img. 09 -13 le muestran los pasos de montaje
necesarios.
Montaje:
Si usa esta opción, deberá recortar la parte de espuma
que hace de patín de cola. Deberá hacer un rebaje en el
timón de dirección para poder colocar la varilla del timón.
Img.10
Pegue el tubo 35 usando cianocrilato y recortándolo si
fuese necesario. El codo superior, último doblez, de la
varilla de la rueda de cola 47 debe hacerlo después de
haberlo introducido en el tubo 35.
Otra opción
Puede fabricar un timón, náutico, totalmente operativo con
un trozo de Depron de 3 mm. Puede fijarlo con cinta
adhesiva (p.ej. Tesa) entre las varillas. Se fija con collarines
a la varilla de la rueda de cola. Estas piezas están incluidas
en el kit de flotadores.
4. Instalación del motor
El motor de serie, Permax 400, ya viene instalado.
Aunque puede reemplazarlo por la opción de Tuning. Le
recomendamos, dos opciones.
A. Motor Standard G Permax 400 con reductora 3:1.
Img. 20
Motorización del Easy Glider E
(Reductora 3:1 con Permax 400) # 33 2688
y porta-palas Ø 3,5 mm # 33 2310
y hélice 8 x 3,8 “ # 73 3139
B. Kit de propulsión „Sport“ BL-X 22-18 # 33 2627
que incluye regulador, porta-palas y hélice
5. Conexión del motor
¡Haga una prueba! El eje del motor / hélice deben girar en
contra del sentido de las agujas del reloj, vistos desde
delante. Si fuese necesario, invierta el sentido de giro del
motor.
6. Hacer funcionales los timones
Mueva ligeramente, oscilando, los timones de dirección y
profundidad para que el abisagrado funcione correctamente
¡No corte ni retire los timones! Img. 25 + 27
7.Pegado de los estabilizadores al fuselaje
Compruebe, sin usar aun pegamento, que el estabilizador
horizontal encaja y se adapta perfectamente en el fuselaje.
Debe comprobar especialmente, que el estabilizador horizontal 7 se asienta totalmente sobre el fuselaje y está
paralelo a las alas. Puede montar las alas para probar.
Haga las comprobaciones visuales desde el morro del
modelo. Una vez perfectamente alineado, puede pegarlo
al fuselaje. ¡Repase antes de pegar!
Compruebe, sin usar aun pegamento, que el estabilizador
horizontal encaja y se adapta perfectamente en el fuselaje.
Debe asegurarse de que el estabilizador vertical 8 se
asienta perfectamente sobre el fuselaje formando un ángulo
perfecto de 90° respecto a las alas y al estabilizador horizontal. Utilice una escuadra para asegurarse.
Img. 30
Use las ilustraciones Img.12+12a.para ver como debe
doblar la varilla Esta varilla, 47 tiene un Ø de 1,3 mm.
Los tubitos necesarios 35 están incluidos.
44
8. Fijar las transmisiones de los timones de
dirección y profundidad.
Haga pasar las varillas de acero 41 y 42 por los retenes de
las varillas 25 – Ponga los servos de ambos timones en
Page 45

posición neutra y apriete los prisioneros 28. Si fuese
necesario, doble un poco las varillas.
Img. 31-32
9. Instalación del tren de aterrizaje
El tren de aterrizaje viene pre-montado y solo tiene que
apretarlo un poco para encajarlo en el soporte 74. Instalar
tornillo 75. Img. 34 .
Alerones opcionales
Si quiere volar solo con dos ejes (dirección y profundidad)
sáltese los puntos 10-14 Abb.36-39, y proceda a pegar
las tapas de los huecos de alerones y colocar la
decoración.
El modelo, aun teniendo diedro, vuela igual de bien con 2
o 3 ejes. No se preocupe, podrá convertir su modelo de 2
a 3 ejes cuando lo desee,.
.........................................................
Si quiere volar con alerones (tres ejes), siga estos
pasos.
Img. 38
14. Instalación de las transmisiones de los alerones
Enganche las varillas con la forma de Z 30 en el agujero
interior del brazo del servo hágala pasar a través del retén
de la varilla 25 . Ponga los alerones y los servos en posición
neutra, y apriete el prisionero 28.
Img. 39
.........................................................
15. Las alas se fijan al fuselaje usando el tornillo 32 .
Img. 40
16. Instalación del equipo de radio
Ahora, instalará los componentes que faltan del equipo
de radio, y la batería, en la zona de la cabina. Distribúyalos
para que el centro de gravedad se corresponda con el
indicado en la Img. 43.
Puede usar baterías de distintos tipos y formatos. Si fuese
necesario, podría añadir algo de lastre en el modelo en
aquellos casos donde no pudiese ajustar el centro de
gravedad con los componentes elegidos.
10. Hacer funcionales los alerones + Instalar los
servos de alerones
Corte los lados de los alerones 6 que encontrará en las
alas. Mueva ligeramente, oscilando, los alerones para que
el abisagrado funcione correctamente ¡No corte ni retire
los alerones!!
Img. 36
11. Instalación de los servos de alerones
Usando la emisora, coloque los servos en su posición
neutra. Instale los brazos en los servos, de manera que
formen un ángulo de 90° respecto al lateral del servo - 1x
izquierda y 1x derecha.
Coloque los servos en los alojamientos de las alas 6
siguiendo su silueta. Dependiendo del tipo de servo
utilizado, puede que necesite modificar los alojamientos.
Puede dejar caer una gota de pegamento caliente, sobre
la unión del canto del servo y su alojamiento, presionando
el servo inmediatamente – aplicando un poco más de
pegamento más tarde, si fuese necesario.
Img. 37
12. Prolongar los cables de los servos de alerones
Lleve el cable, o prolongador, hacia el centro del ala
(fuselaje). Fíjelo, de canto y en línea recta, en el borde
delantero de la tapa del larguero. Debe sobresalir unos
120 mm de la “costilla raíz” del ala, para poderlos conectar
fácilmente al receptor instalado en el modelo. Fije los
cables al ala, usando unas gotas de pegamento caliente.
13. Instalar los horns en los alerones
Coloque los retenes 25 de las varillas de los alerones en
el agujero exterior de los horns 24. Fije los retenes con
una arandela 26 y una tuerca 27. Atención: ¡1x izquierda
y 1x derecha! Apriete las tuercas pero sin hacerlo
demasiado fuerte. A continuación, usando una aguja,
aplique un poco de cianocrilato o líquido fija-tornillos.
Coloque el prisionero 28 usando la llave allen 29 en el
retén de la varilla 25. Pegue los horns 24 – con la hilera de
agujeros mirando a la línea de la bisagra – y péguelos en
los alojamientos donde antes habrá aplicado algo de
activador.
Para fijar estos componentes, el kit incluye velcro
autoadhesivo 20+21. Es posible que el pegamento del
velcro no sea suficiente por lo que recomendamos que
use un poco de cianocrilato para fijar el velcro al fuselaje y
los componentes.
El receptor se instala verticalmente detrás del tornillo de
fijación de las alas. El cable de la antena se sacará del
fuselaje y se fijará por debajo de este con cinta adhesiva,
dejando el resto colgando por la parte trasera del fuselaje.
El motor incluido ya viene desparasitado internamente.
Este desparasitado es más que suficiente si utiliza el
regulador MULTIcont X-16 # 7 2271.
Si se decide a utilizar un regulador distinto, tendrá que
aumentar el desparasitado. Para ello, le sugerimos el kit
de condensadores # 8 5020. Suelde un condensador de
47 nF entre cada polo del motor y la carcasa de éste, y
otro entre ambos polos del motor.
Instalación de la hélice.
Antes de la primera prueba, aun debe instalar la hélice.
Siempre debe asegurarse de que quede bien sujeta. El
cono y la hélice se fijan con pegamento y se pegan al eje
del motor. Lije el eje con papel de lija antes de pegar. Con
hélices Günther deberá usar Epoxy 5 minutos y con
hélices MPX cianocrilato.
Una vez finalizada la instalación de todos los cables, podrá
realizar las primeras pruebas, pero no antes de que haya
fraguado el pegamento.
Solo deberá conectar el motor a las baterías/
regulador, si la emisora está encendida y una vez
que haya comprobado que todos los mandos de
control del motor estén en posición „OFF“ (apagadoralentí).
Encienda la emisora y conecte la batería al regulador, y
éste al receptor. Es necesario, que su regulador disponga
de sistema BEC (Alimentación del receptor a través de la
45
Page 46

batería del motor).
Accione brevemente el motor y compruebe el sentido de
giro de la hélice (mientras prueba, sostenga firmemente
el modelo, comprobando que no haya nada detrás del
modelo que pueda salir despedido).
instrucciones del “MagicMixer”. Compruebe la polaridad.
El pin de asignado para los pulsos es reconocible en la
etiqueta del MagicMixer #1 mediante el símbolo En la
mayoría de los cables, esta señal se indica mediante el
color amarillo o naranja.
Atención: ¡Las lesiones pueden ser severas incluso
con motores y hélices de pequeño tamaño!!
17. Ajuste de los recorridos de las superficies de
mando
Para obtener un control exacto del modelo y unas
reacciones equilibradas, se han de ajustar los recorridos
de las superficies de mando. Lo valores se han medido en
el punto más lejano del timón/alerón.
Timón de profundidad
hacia arriba - tirando de la palanca - aprox. +11 mm
hacia abajo - empujando la palanca - aprox. - 11 mm
Timón de dirección
a izquierda y derecha aprox. 6 –10 mm
a cada lado
Alerones
hacia arriba aprox. + 7 mm
hacia abajo aprox. - 3 mm
MagicMixer #1(Opcional) # 7 3000
El MagicMixer #1 posibilita el uso de emisoras sencillas
sin capacidades de mezcla. Es suficiente para:
MINI MAG Emisoras de 3 canales
Sin el MagicMixer #1 será imprescindible de que disponga
de una emisora de cuatro canales con funciones de
mezcla.
También podrá manejar el Minimag con una emisora como
la Ranger III (de los kits EasyStar RTF o SpaceScooter
RTF).
Para ello, se conectarán a un canal del receptor (salida
izquierda / derecha)
dirección, siendo controlados mediante dicho canal.
Los servos, y por tanto el recorrido de las superficies de
mando ya vienen predefinidas. La proporción de mezcla
entre dirección y alerones (“Combi-Switch”) y el diferencial
de alerones ya vienen predefinidas también en el
MagicMixer #1.
La mezcla diferencial de alerones hace que el alerón que
sube tenga un recorrido más amplio que el que baja. Esa
mezcla evita que el avión se incline más de lo debido hacia
el lado al que está girando.
Al usar el MagicMixer #1 seguirá necesitando los
siguientes canales en la emisora:
Canal 1:Alerones, mezcla timón de dirección (3 Servos)
Canal 2:Timón de profundidad (1 Servo)
Canal 3:Control del motor (1 Regulador)
Conecte los cables de servos como se le indica en las
dos servos de alerones y el timón de
Asignación de pines en el MagicMixer #1:
r / l = Al receptor, salida derecha/izquierda
AR = Al servo de alerón derecho
AL = Al servo de alerón izquierdo
R = Al servo del timón de dirección
Podrá invertir el sentido de giro de los servos invirtiendo el
canal apropiado en su emisora.
Cable en “V” para los servos de alerones
(Opcional) # 8 5030
El cable en “V” le permitirá usar una económica emisora
de 4 canales sin posibilidades de mezcla.
El control de ambos servos de alerones se efectúa
mediante
cable en “V”.
Atención: En este caso, el diferencial de alerones se
produce de manera mecánica. Deberá colocar el brazo
del servo un par de dientes desplazado hacia adelante.
Esto debe hacerlo antes de instalar los servos. El timón
de dirección se controla mediante un canal separado.
Emisoras computerizadas
¡Al usar este tipo de emisoras, no necesitará ni el
MagicMixer #1 ni el cable en “V”!
La emisora debe tener:
- Diferencial de alerones
- Servoreverse (Inversión del sentido de giro de los servos)
- Ajuste del recorrido de los servos
- si fuese necesario, Combi-Switch (Mezcla de timón de
dirección / Alerones)
Aviso: Visto en la dirección de vuelo, al mover la
palanca de alerones a la derecha el alerón derecho
debe subir. Si su emisora no le permite invertirlo,
debería conectar la transmisión en el lado opuesto.
18. Detalles para la decoración
Para ello, el kit incluye una lámina decorativa en color.
Podrá usar los motivos decorativos y palabras siguiendo
nuestra plantilla (Imagen del kit) o decorarlo a su gusto.
Para los usuarios que vuelen con solo dos canales,
también hay pegatinas que le permitirán tapar los huecos
de los servos de alerones.
19. Obtención del centro de gravedad
Para conseguir un comportamiento noble durante el vuelo,
su Mini Mag, al igual que cualquier otro avión, debe tener
su centro de gravedad en un punto determinado. Termine
de montar su modelo y coloque la batería.
El centro de gravedad debe quedar a 67mm por detrás
del borde de ataque, medido sobre el fuselaje y por el
borde inferior del ala - aquí encontrará la marca apropiada
-.
una salida del receptor a la que se conecta el
46
Page 47

Sosteniendo por aquí con los dedos, el modelo debe quedar
equilibrado. Podrá hacer algunas correcciones
desplazando la batería. Una vez que haya encontrado el
punto exacto para instalar la batería, marque con un
rotulador resistente al agua la posición y así no tendrá
que calcular de nuevo, cada vez que cambie la batería. En
los casos que no pueda solucionarlo de esta manera,
siempre podrá añadir algo de lastre para equilibrar el modelo
Img. 43
20. Preparativos al primer vuelo
Elija un día con muy poco viento. La horas más apropiadas
son las primeras de la tarde.
¡Antes del primer vuelo del día, haga una prueba de
alcance!
Compruebe que las baterías de la emisora y del avión están
recién cargadas. Antes de encender la emisora compruebe
que su canal no está ocupado.
Un ayudante se alejará con la emisora y cuando se lo
indique moverá un mando. La antena estará replegada por
completo. Observe los servos. Cualquier servo que no sea
sobre el que se actúe deberá permanecer en reposo hasta
una distancia de 60m. El servo apropiado deberá responder
fielmente a las órdenes de la emisora. ¡Sólo deberá llevar
a cabo esta prueba cuando ninguna otra emisora esté
emitiendo,
prueba con el motor en marcha. Así comprobara que el
alcance no disminuye.
Si tiene alguna duda, no despegue bajo ningún concepto.
Envíe el equipo de radio completo (con baterías, cable de
interruptor, Servos, etc.) al servicio técnico del fabricante
para una revisión.
El primer vuelo ...
ni siquiera en otra frecuencia! Deberá repetir la
Familiarícese a suficiente altura con las reacciones del
avión, cuando los motores estén apagados. Simule
aproximaciones de aterrizaje a gran altura, de esta forma
estará preparado para cuando la batería del motor se esté
agotando.
Procure, durante la fase inicial y especialmente durante
el aterrizaje, no realizar „movimientos bruscos“ a poca
altura del suelo. Es preferible aterrizar de forma segura y
caminar unos pasos, a poner en peligro la integridad del
modelo durante la maniobra.
21. Seguridad
La seguridad es el primer mandamiento del vuelo de modelos. El seguro de responsabilidad civil es obligatorio. En
caso de que vaya a entrar en un club o una asociación
puede realizar la gestión del seguro por esa vía. Preste
atención a las coberturas del seguro (aviones motorizados).
Mantenga siempre los modelos y la emisora en perfecto
estado. Infórmese acerca de las técnicas de carga de las
baterías que vaya a utilizar. Utilice las medidas de
seguridad más lógicas que son ofrecidas. Infórmese en
nuestro catálogo principal. Los productos MULTIPLEX
están realizados de la práctica para la práctica por
experimentados pilotos de radio control.
¡Vuele con sentido de la responsabilidad! Realizar pasadas
por encima de las cabezas de la gente no es una
demostración de saber hacer, los que realmente saben
no necesitan hacer eso. Informe de esta circunstancia,
por el bien de todos, a los otros pilotos. Vuele siempre de
forma, que ni Usted ni otros entren en peligro Recuerde
que hasta el equipo de radio control más puntero puede
verse afectado por interferencias externas. Haber estado
exento de accidentes no es una garantía para el siguiente
minuto de vuelo.
¡Nunca intente volar con el motor bloqueado!
Lance el modelo a mano (siempre contra el viento).
Le recomendamos que se busque un ayudante
experimentado para sus primeros vuelos.
Tras alcanzar la altura de seguridad suficiente, trime los
timones y alerones usando la emisora, de manera que el
vuelo sea equilibrado y sin desviarse.
Nosotros, el Team-MULTIPLEX, le deseamos mucho éxito
durante el montaje y los posteriores vuelos.
MULTIPLEX Modellsport GmbH &Co. KG
Mantenimiento y soporte de productos
Klaus Michler
47
Page 48

Lista de partes RR MiniMag # 26 4211
Nr. Uds. Descripción Material Dimensiones
1 1 Manual de instrucciones RR Papel DIN-A4
2 1 Lámina decorativa Lámina adhesiva impresa 400 x 700mm
3 1 Fuselaje con cabina, 2 x servos,
motor regulador instalados Elapor Pieza prefabricada
6 1 Alas montadas para 2 ejes Elapor Pieza prefabricada
7 1 Timón de profundidad con horn y
retén de transmisión instalado Elapor Pieza prefabricada
8 1 Timón de dirección con horn y
retén de transmisión instalado Elapor Pieza prefabricada
Accesorios
20 2 Velcro (rugoso) Plástico 25 x 60 mm
21 2 Velcro (suave) Plástico 25 x 60 mm
24 2 Horn Plástico inyectado Pieza prefabricada
25 2 Retén de transmisión Metal Pieza prefabricada Ø6mm
26 2 Arandela Metal M2
27 2 Tuerca Metal M2
28 2 Prisionero Allen Metal M3 x 3mm
29 1 Llave Allen Metal SW 1,5
30 2 Varilla para alerones con forma de Z Metal Ø1 x 70mm
32 1 Tornillo Plástico M5 x 50mm
35 1 Funda bowden Plástico 3 x 2 x 90 mm
47 1 Varilla de acero Metal 1,3 x 250 mm
52 1 Hélice Plástico 5,0 x 4,0“
75 1 Tornillo Metal M3 x 12mm
Tren de aterrizaje
70 1 Tren principal con dos ruedas Ø 53mm Metal / Plástico Pieza prefabricada
CD con instrucciones / Video
80 1 CD con instrucciones / Video Pieza prefabricada
A B
Auftriebskraft
D
C
α
E
F
X
48
Page 49

Principios básicos tomando como ejemplo un avión
Un avión, o mejor dicho, un avión de radiocontrol, se manda con los timones por los siguientes 3 ejes: eje vertical, eje
transversal y eje longitudinal.
El accionamiento del timón de profundidad supone una modificación de la posición de vuelo en el eje transversal. En el caso
de las desviaciones del timón de dirección, el modelo gira por el eje vertical. Si se quiere accionar un alerón, el modelo rola
por el eje longitudinal. Como la posición en V de nuestro EasyStar está en el ala sustentadora, se puede prescindir de los
alerones. En este caso, el modelo se acciona por el timón de dirección en el eje vertical
influencias del exterior, como p.ej. turbulencias que llevan al avión fuera de pista, el piloto debe pilotar el avión de tal manera,
que vuele hacía donde él quiere que vaya. Con la ayuda de una propulsión (Motor y hélice) se elige la altura de vuelo. Un
variador suele modificar las revoluciones del motor sin escalas. Es importante, que solamente el tirar del timón de profundidad
del modelo solo lo deja subir hasta que se haya alcanzado la velocidad mínima. Según la potencia de la propulsión se
pueden alcanzar distintos ángulos de paso.
Empenaje
del timón de
dirección
Ala derecha
Empenaje
del timón de
profundidad
y en el eje longitudinal. Según las
timón de
direction
Eje vertical
Capottina
Eje longitudinal
El perfil del ala sustentadora
El ala sustentadora tiene un perfil abombado, en el que el
aire se desliza durante el vuelo. El aire por encima del ala
sustentadora recorre – en comparación con el aire en la parte
de abajo - un mayor recorrido en el mismo tiempo. Por ello,
en la parte superior del ala sustentadora se crea una presión
baja con una fuerza hacía arriba (empuje), que mantiene al
avión en el aire. Ilustr. A
El centro de gravedad
Para alcanzar características de vuelo estables, su modelo
tiene que estar en equilibrio en un punto determinada, al
igual que otros aviones también. Antes del primer vuelo es
imprescindible determinar este centro de gravedad.
La referencia se toma desde el borde de ataque del ala (cerca
del fuselaje). En este punto, el modelo debe equilibrase en
horizontal bien con la ayuda de los dedos o de una balanza
del centro de gravedad MPX # 69 3054. Ilustr. B
Si no se ha llegado aún al punto exacto del centro de
gravedad, este se puede alcanzar moviendo los
componentes montados (p. ej. batería del motor). Si aún no
fuera suficiente se introduce una cantidad determinada de
plomo o masilla o bien en la punta o bien en la cola del
fuselaje. Si el avión se cae por la cola, se meterá más peso
en la punta – si se cae por la punta, se hará lo mismo en la
cola.
La DAA (
en grados de ángulo, con el que la cola se ajusta respecto al
ala. Montando el ala y el estabilizador en el fuselaje sin dejar
Diferencia del ajuste del ángulo) indica la diferencia
timón de
profunidad
Eje transversal
Fuselaje
Ala izquierda
E
ranuras y a conciencia, la DAA se mantiene de forma exacta.
Si ahora los dos ajustes (centro de gravedad y DAA) son
correctos, no se tendrán problemas ni a la hora de volar ni
durante el rodaje. Ilustr. C
Timones y desviaciones de los timones
Solo se pueden alcanzar características de vuelo seguras y
precisas, si los timones funcionan de forma suave, correcta
y calculadas desde el tamaño de las desviaciones. Las
desviaciones indicadas en las instrucciones de montaje se
han determinado durante unas pruebas y recomendamos
que al principio se guíe por estas medidas. Siempre hay
tiempo para ajustarlas a su forma de volar.
Funciones de mando en la emisora
En la emisora de radiocontrol hay dos palancas de mando,
que accionan los servos y los timones del modelo.
La asignación de estas funciones están indicadas en el
modo A – otras asignaciones también son posibles.
Con la emisora se accionan los siguientes timones
El timón de dirección (izquierda/derecha) Ilustr. D
El timón de profundidad (arriba/abajo) Ilustr. E
El estrangulador del motor (motor off/on) Ilustr. F
La palanca del estrangulador del motor no debe volver por si
sola a la posición neutral. Es encastrable durante todo su
recorrido. Como funciona el ajuste se puede leer en las
instrucciones de montaje de la emisora.
49
Page 50

Regulador MULTIcont X-16 # 7 2271
X
Estas instrucciones forman parte del producto. Contienen
importante información y recomendaciones de seguridad.
Manténgalas siempre al alcance de la mano y en caso de
vender el producto a un tercero, adjúntelas al producto.
1. C
ARACTERÍSTICAS TÉCNICAS
MULTIcont X-16
Número de Elementos /NiCd/NiMH
6-8 / 2-Elementos
LiPo
Consumo 16 A
Frecuencia ~ 6 kHz
Alimentación receptor (BEC):
Tensión BEC 5 V
Consumo BEC max. 1 A
Perdida de rendimiento BEC max. 2,5 W
Dimensiones (Sin cables) 27x20x8 mm
Perso con cables 17g
2. R
ECOMENDACIONES DE SEGURIDAD
• Antes de ponerlo en marcha, lea detenidamente las
instrucciones.
• Evite el sobrecalentamiento: No obstaculice la circulación de
aire.
• Respete la polaridad de las baterías:
Una polaridad errónea, dañará inmediatamente el regulador.
Por tanto:• Cable rojo al POSITIVO (+),
• Cable negro al NEGATIVO (-)
Le recomendamos el cable de conexión con 6 polos MPX #
85213/85214 para unir las baterías/regulador y el
motor/regulador, siempre y cuando no suelde el motor
directamente.
• Cuando monte, o suelde, el motor o el regulador:
Desconecte siempre la batería
(Peligro de cortocircuito)
• Siempre que trabaje con el motor tenga en cuenta:
Cuando haga pruebas o trabaje, tenga en cuenta que:
No sostenga en la mano el motor mientras funciona. Sostenga
firmemente el modelo. Compruebe que la hélice puede girar sin
obstáculos. Aleje de las proximidades de la hélice, cualquier
objeto que pueda ser succionado por la hélice. (Pañuelos,
pequeñas piezas, papel, etc.). Manténgase alejado del alcance
de la hélice (¡Podría resultar herido!).
3. P
ECULIARIDADES
• BEC con corte automático (por baja tensión) (recom. Hasta
8 elementos) con adaptación automática según número de
elementos.
• Protección contra encendidos: Al conectar las baterías, el
regulador permanecerá apagado. El motor se conectará,
exclusivamente, si al conectar las baterías, deja brevemente la
palanca del gas en posición de ralentí. En cualquier otro caso,
el LED parpadeará.
• Protección contra sobrecargas. Se dejará de suministrar
corriente al motor si se produce una sobrecarga o un
sobrecalentamiento. Para reactivarlo, deberá desconectar las
baterías y volver a conectarlas.
• Protección contra sobre-tensión
Con tensiones >16 V el regulador se desconectará.
4. C
ONEXIÓN AL MOTOR
Nota: Para instalar el regulador son necesarias algunas
soldaduras. Para montar el regulador se han de realizar
soldaduras. La soldadura requiere unos mínimos cuidados y
esmero que incidirán directamente en la seguridad y el
funcionamiento del regulador:
• Use hilo de soldadura específico para electrónica
-16# 72271
• No use ácido para la soldadura
2. Conexión del regulador al motor
Suelde el cable del regulador marcado con „MOTOR“ al
motor: Conexión en directo: amarillo Æ „+“ ; azul Æ „-“
3. Controle el sentido de giro
Si el sentido de giro no es el deseado (p.e.. con
reductoras),sólo tendrá que invertir la conexión de los
cables.
5. P
1. Conecte el cable del regulador al receptor (REC).
En emisoras MPX en el canal 4 = Gas/Motor
2. En emisoras programables, debe ajustar el recorrido del
servo Gas/Motor al 100 % en ambas direcciones.
3. Ponga la palanca de GAS (y trimms
ralentí/Motor OFF
4. Encienda la emisora
5. Conecte la batería al regulador
Atención: ¡Una polaridad errónea dañara el regulador!
Si el LED parpadea, el regulador estará en modo Protección de
encendio Æ Desconecte la batería del receptor, invierta el canal
del GAS (Servo-Reverse) y vuelva a conectar la batería Æ
Listo.
• Importante:
• Primero encienda la emisora, y después conecte la
batería
Si el LED parpadea, la protección de encendido se activa
Æ Ponga la palanca del GAS en ralentí Æ ¡El regulador se
pondrá en marcha!
• Primero desconecte la batería y luego apague la emisora
6. BEC = B
BEC significa: El receptor y los servos se alimentan de la batería
del motor. No es necesario usar una batería adicional.
• Nota: Tenga en cuenta que, la alimentación del BEC del
MULTIcont X-16 solo entregará 1A para el equipo de radio. En
la práctica, esto implica que: Con 7 elementos solo podrá usar
max. 3 Servos, con 8 elementos, max 2 Servos, y para más de 8
elementos no se dispone de BEC.
El consumo depende directamente de las prestaciones de los
servos, del tipo de vuelo y de la facilidad de movimientos de las
varillas de mando. Cuando no exista otra posibilidad para medir
el consumo del BEC: Haga pruebas en el suelo, haga funcionar
los servos hasta que se agote la batería (desconexión). El
regulador no debería calentarse sobremanera, y el
funcionamiento de los servos debe permanecer constante sin
parones aparentes!
Si prevé usar más servos en un modelo, debe desactivar el BEC
y usar una batería adicional para el receptor. Debe desconectar
el cable rojo(+) del cable de conexión al receptor.
7. DESCONEXIÓN POR TENSIÓN BAJA
La desconexión por falta de tensión del MULTIcont X-16 se
preocupa de desconectar el motor cuando la batería esté a
punto de agotarse. Esto le permitirá volar con la suficiente
energía de manera que pueda aterrizar de manera segura. Una
reducción del número de vueltas de la hélice es el indicativo de
que la batería se está agotando. Debe iniciar el aterrizaje cuanto
antes. Cuando la tensión de la batería caiga por debajo del 65%
de la que tenía al conectarla, el regulador se desconectará
automáticamente. Tras haber llegado a esta situación y
habiendo desconectado el motor por parte del regulador, este
volverá a conectar la potencia durante unos momentos, si se ha
puesto la palanca de gas en la posición de ralentí.
• No sobrecaliente los componentes más de lo debido
• Siga los consejos de alguien con experiencia en soldadura
1. Desparasitar el motor: en el caso de que el motor no venga
desparasitado de fábrica, le recomendamos que use
condensadores # 85020, para evitar cualquier tipo de
interferencia de su equipo RC.
Instrucciones MULTICont
MULTIPLEX Modellsport GmbH & Co. KG • Neuer Weg 2 • D-75223 Niefern • www.multiplex-rc.de
UESTA EN MARCHA
) en la posición de
ATTERY ELIMINATING CIRCUIT
Page 51

51
Page 52

MULTIPLEX
52
Modellsport GmbH & Co.KG
Westliche Gewerbestrasse 1 75015 Bretten-Gölshausen www.multiplex-rc.de
 Loading...
Loading...