

Page 1
AK FunCopter # 21 3001
RR FunCopter # 26 3001
D
F
GB
I
E
© Copyright by MULTIPLEX 2010 Version 1.1
Bauanleitung 2 ... 13
Notice de construction 14 ... 25
Building instructions 26 ... 37
Instruzioni di montaggio 38 ... 49
Instrucciones de montaje 50 ... 62
1
Page 2
SCHNELLSTART
Bevor Sie das Modell in Betrieb nehmen, lesen Sie unbedingt die Sicherheitshinweise!
Je nach Version Ihres FunCopters, müssen noch die Elektronik-Komponenten eingebaut werden.
MUL TIPLEX Fernsteuerelemente für das Modell FunCopter:
AK = Assembled Kit - RR = Ready for Radio
Für AK V ersion:
Servo Tiny S 3 x erforderlich (Roll, Nick, Gier) Best.-Nr. 6 5121
oder Servo Tiny MG 3 x erforderlich (Roll, Nick, Gier) Best.-Nr. 6 5122
Kreisel MUL TIgyro 300DP Best.-Nr. 7 5503
ReglerMULTIcont BL-37/ II Best.-Nr . 7 2276
Für die AK und RR Version:
EmpfängerRX-6-SYNTH light 35 MHz A/B-Band Best.-N r . 5 5876
alternativ 40/41MHz Best.-Nr . 5 5877
oder Empfänger RX-7-DR light M-Link 2,4 GHz Best.-N r . 5 5810
(nur in Verbindung mit einem 2,4 GHz-Multiplex-Sender)
Empfohlener Antriebsakku: Li-BA TT FX 3/1-3200 Best.-Nr . 15 7371
Li-BA TT BX 3/1-3200 Best.-Nr . 15 7136
Li-BA TT eco 3/1-3000 Best.-Nr . 15 7236
Ladegerät:
MUL TIcharger LN-3008 EQU Best.-Nr. 9 2540
für LiPo, LiIo und LiFe Akkus von 2 bis 3S Zellen und NiMH und
NiCdAkkus von 4 bis 8 Zellen.
D
Werkzeuge:
Inbusschlüssel SW 1,5 - 2 - 2,5 - 3 - 4 mm (liegen dem Set bei)
Seitenschneider, Kreuzschlitz-Schraubendreher , Schlitzschraubendreher (für Gyroeinstellung) Kugelgelenkzange (empfohlen).
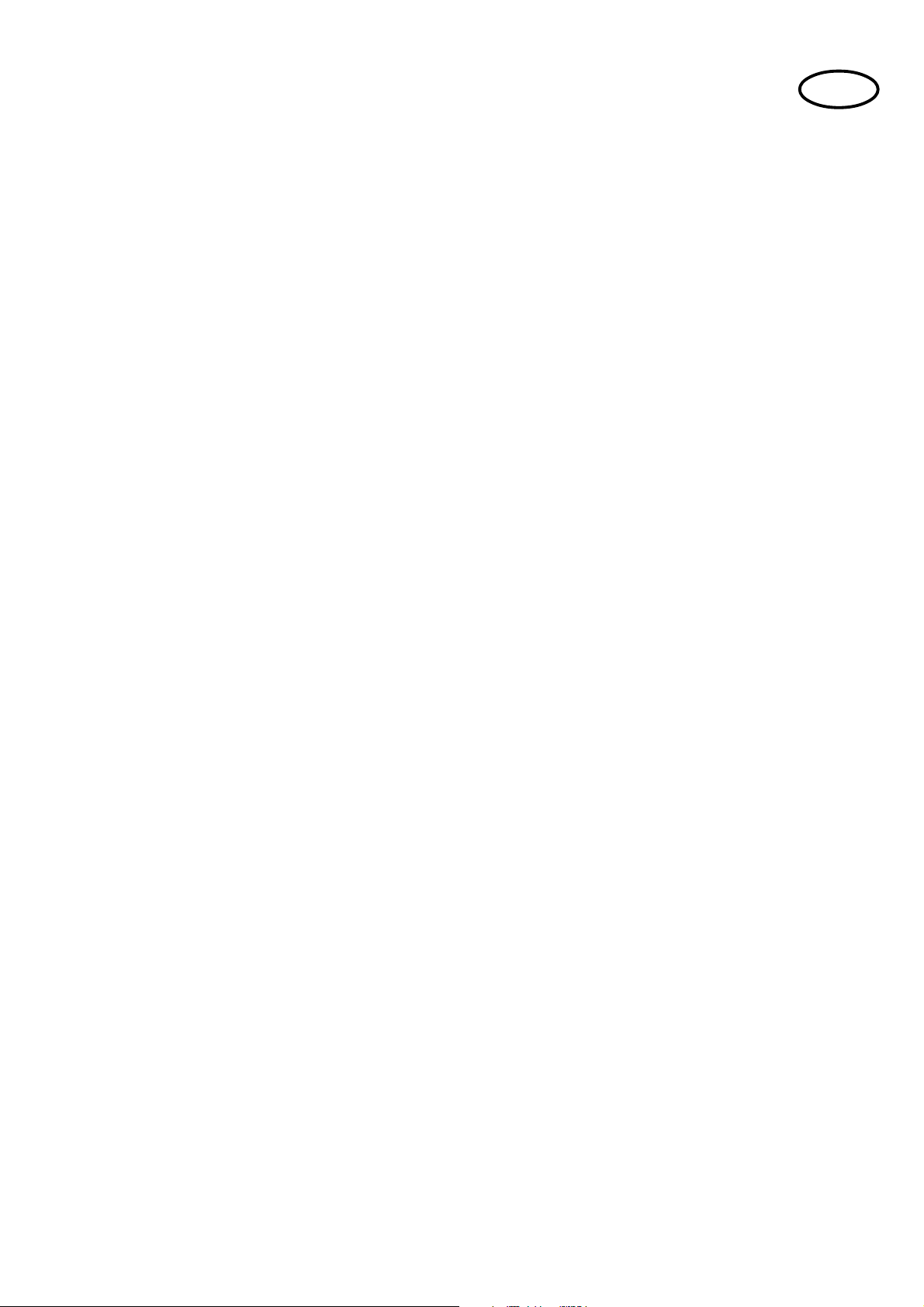
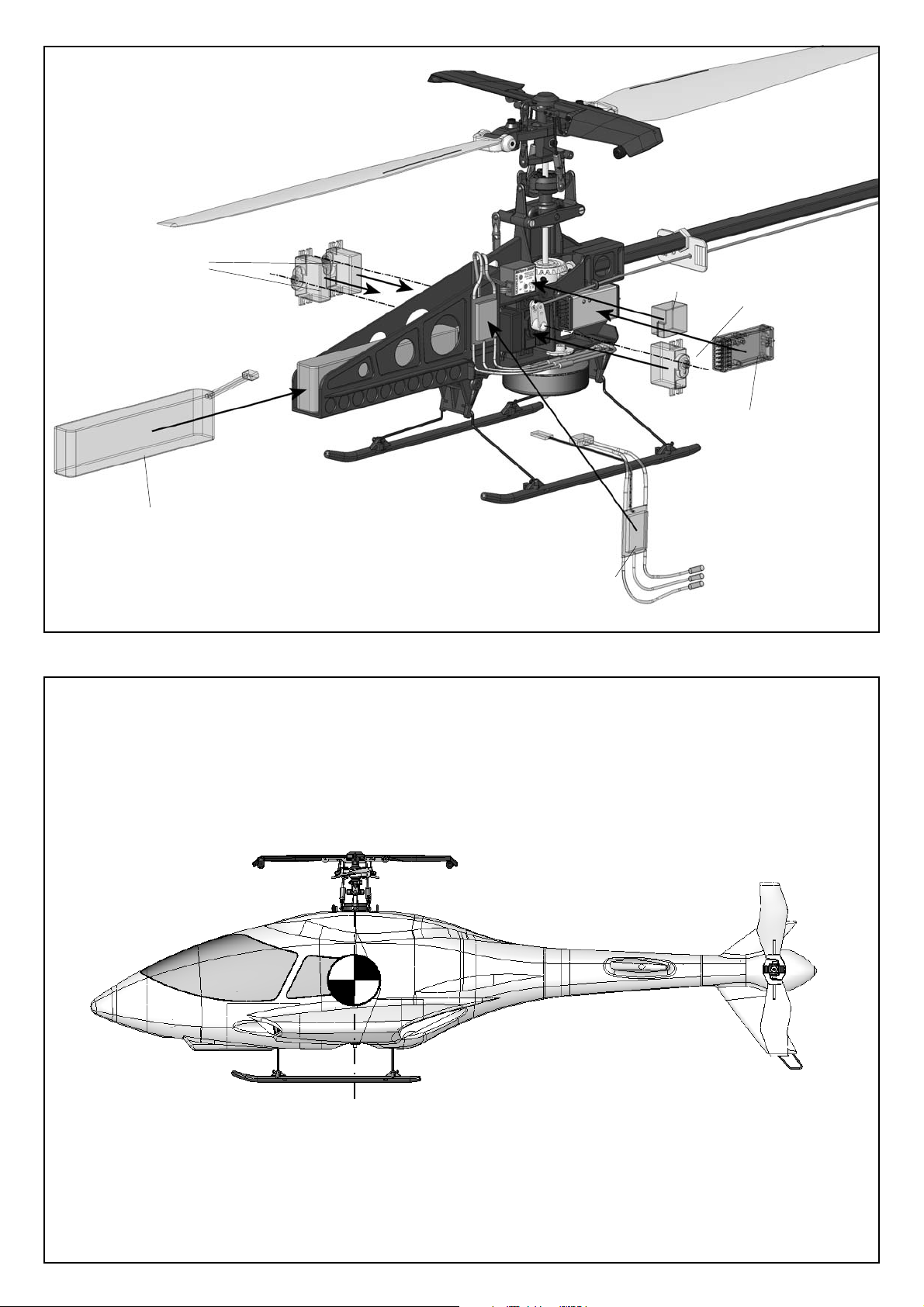
Zum Einbau der Elektronik beachten Sie bitte die AbbildungAS. Eine detailliertere Darstellung des Servoeinbaus finden Sie in
der Montageanleitung.
Beim Einbau des Gyros kommt es auf die richtige Einbaulage an. Beachten Sie hier die beiliegende Anleitung. Das Anbringen
des Gyros sollte mit einem vibrationsdämpfenden, doppelseitigen Isolierklebeband erfolgen. Empfänger , Steller und Akku befestigen Sie mit Klettband. Die Kabel sind so zu verlegen, dass sie nicht in bewegliche Teile geraten können.
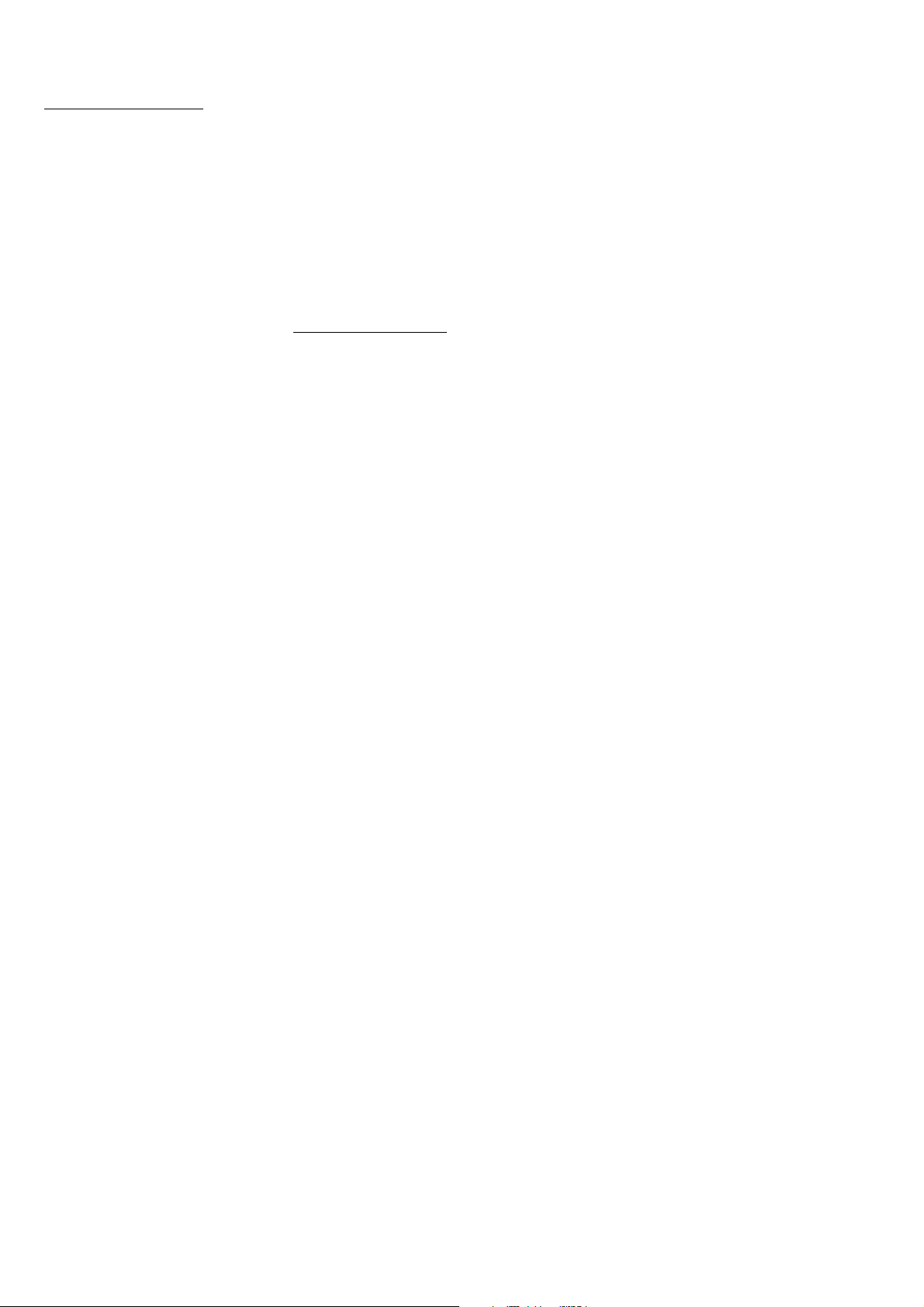
Berücksichtigen Sie beim Anbringen des Akkus die Schwerpunktlage (siehe Abb. CG). Für Schwebeflug sollte der Schwerpunkt direkt unter der Rotornabe sein. Für schnellere Rundflüge ist es vorteilhaft den Akku weiter vorne zu positionieren.
Das standardmäßig verbaute Gestänge im Rotorkopf hat sich bestens bewährt. Für eine noch exaktere Feinabstimmung liegt
das Justagegestänge bei. So kann der Spurlauf (der Lauf der Rotorblätter in der Ebene) nachjustiert werden, und dadurch
hervorgerufene Vibrationen minimiert werden. Tauschen Sie das Mischerarm-Gestänge 35 und die Schnappkugelpfanne 55
gegen das beiliegende Justagegestänge 13 und die Schraubkugelpfanne 14 aus. Der Einbau erfolgt gemäß Abb. MR-05 &
Abb. MR-06 in der Bilder-Anleitung. Vermeiden Sie S pannungen beim Einbau durch einstellen der korrekten Gestängelänge.
Der S purlauf lässt sich korrigieren, indem auf einer Seite das Gestänge herausgeschraubt wird, und auf der anderen Seite mit
der gleichen Anzahl an Umdrehungen hinein.Somit wird das Rotorjoch geneigt, was sich auf den Spurlauf auswirkt. S tellen Sie
eine V erschlechterung fest, muss das Rotorjoch durch erneutes Einstellen zur anderen Seite geneigt werden.
2
Page 3
Servo
Akku
Regler
Gyro
Servo
Empfänger
Abb.AS
Abb. CG
3
Page 4

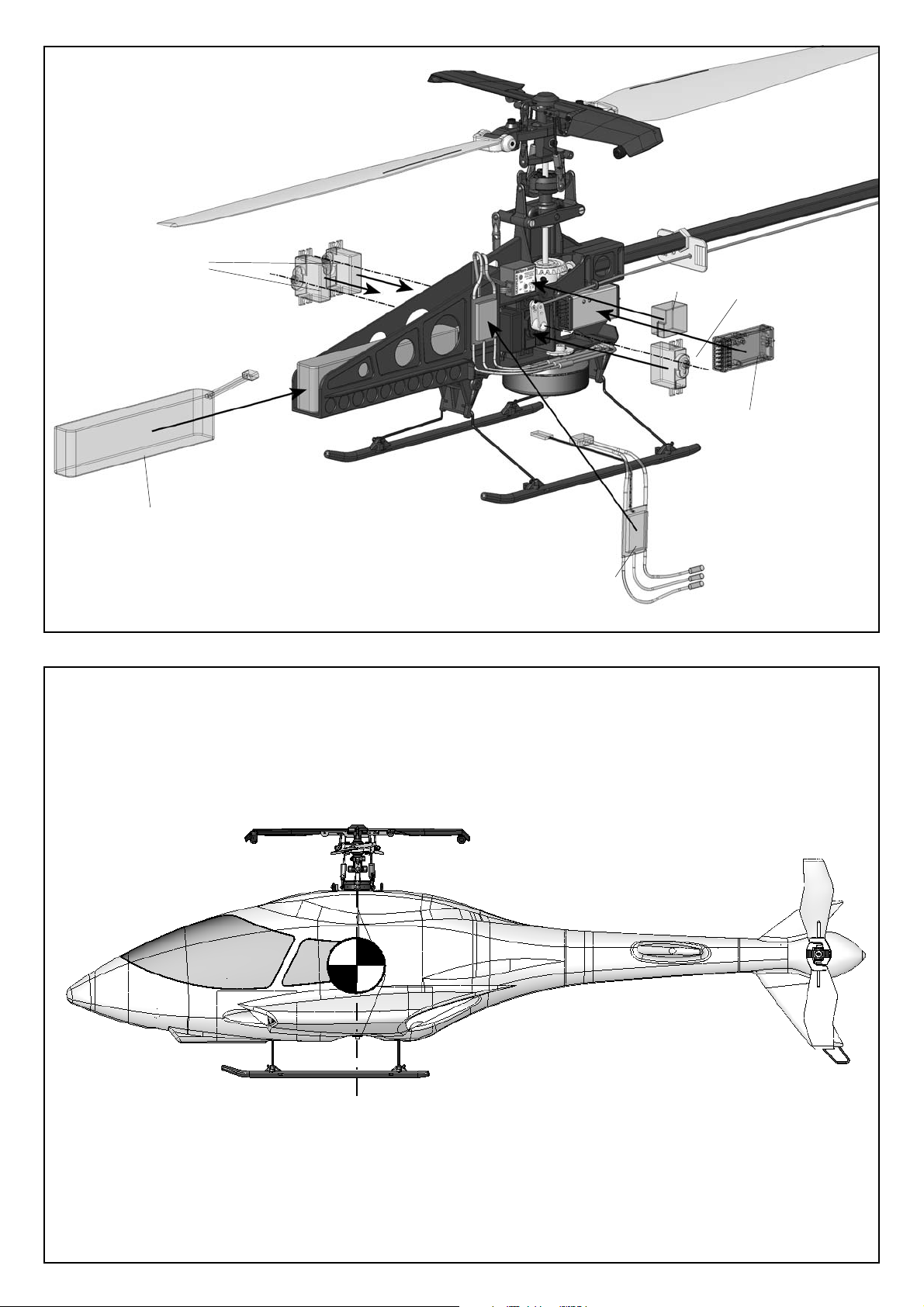
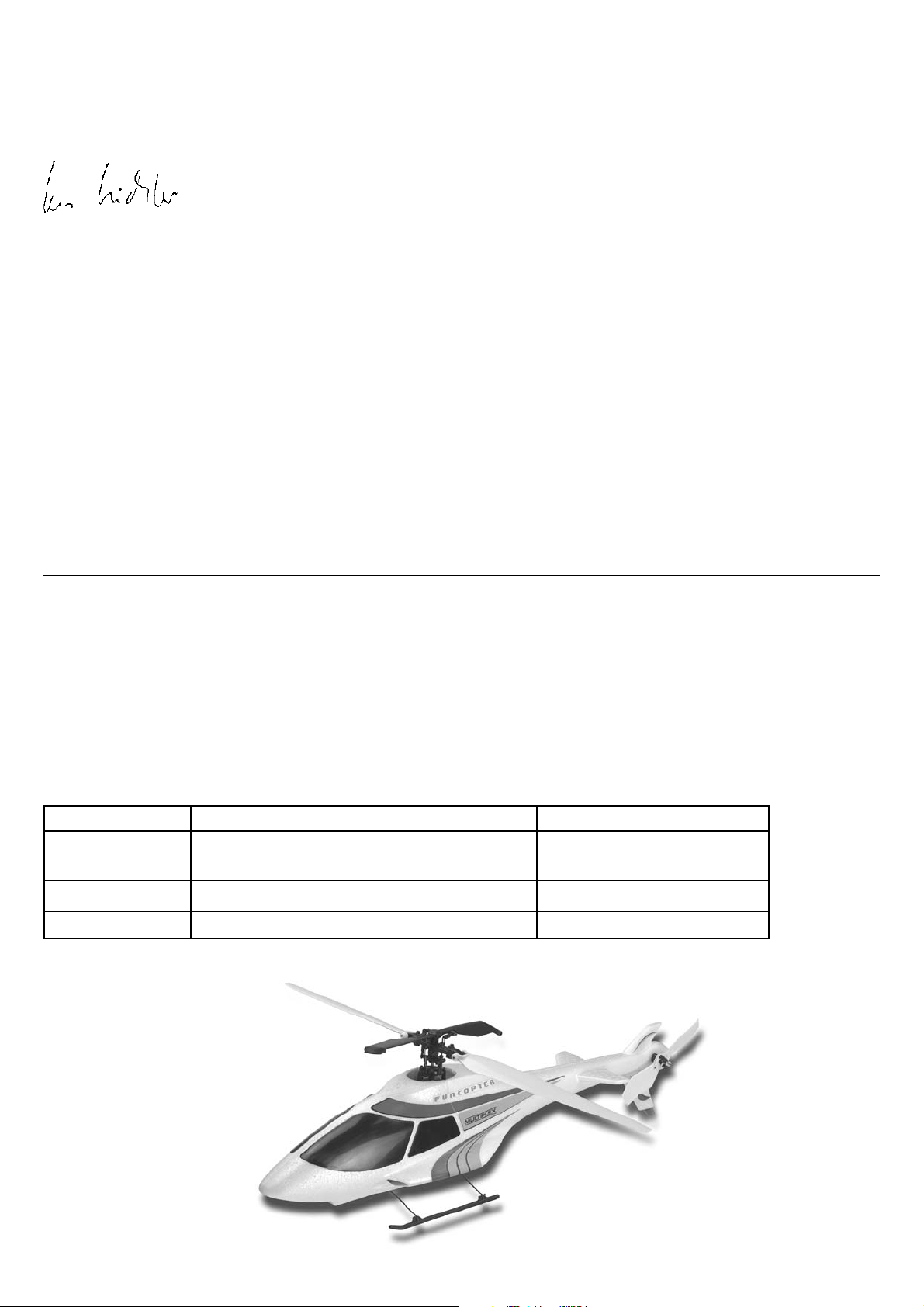
FunCopter
Technische Daten:
Rotordurchmesser: 708 mm
Länge über alles: 855 mm
Fluggewicht ca. 1250 g
ist ein Anspruch auf Gewährleistung gegeben.
- Betreiben Sie Ihr Modell nie auf öffentlichen S traßen, in Parks
oder auf Spiel- und anderen Plätzen - schon aus versicherungstechnischen Gründen sollten Sie nur auf Modellflugplätzen fliegen. Fragen Sie Ihren Fachhändler - bei ihm
erhalten Sie sicher Kontaktadressen.
Sicherheitshinweise
Diese Sicherheitshinweise müssen mit der Bau- und Betriebsanleitung sorgfältig aufbewahrt werden und im Falle einer Weitergabe des Produkts mit ausgehändigt werden. Sollte die
Anleitung verloren gehen, steht diese nochmals auf der
Webseitewww.multiplex-rc.de als Download zur V erfügung.
Hubschraubermodelle sind für Personen unter 16 Jahren nicht geeignet. Jugendliche dürfen ein solches Modell
nur unter Aufsicht und Anleitung eines Erwachsenen betreiben, der über das nötige Fachwissen verfügt und sich über die
möglichen Gefahren bewusst ist.
Ein Hubschraubermodell ist kein Spielzeug im üblichen Sinne. Die Fertigkeiten zum Betrieb müssen erlernt werden. Hilfestellung bekommen Sie in Vereinen, bei versierten Modellpiloten oder in Flugschulen. Zielgerichtetes Training an einem
Modellflugsimulator wird empfohlen.Adressen bekommen Sie
z.B. beim Deutschen Modellflieger Verband e.V. in Bonn
www.dmfv.de.
Die Wartung und der Betrieb von Hubschraubermodellen erfordert technisches Verständnis, ein Mindestmaß an handwerklicher Sorgfalt, sowie Disziplin und Sicherheitsbewusstsein. Fehler und Nachlässigkeiten bei der Wartung,
und dem Betrieb, können Personen- und Sachschäden zur
Folge haben. Da der Hersteller keinen Einfluss auf ordnungsgemäße Wartung und den ordnungsgemäßen Betrieb hat,
weisen wir ausdrücklich auf diese Gefahren hin. Alle W arnungen, auch die sich aus der weiteren Anleitung ergeben, müssen beachtet werden. Bei Nichtbeachtung kann es zu schweren, auch tödlichen Verletzungen kommen.
Achtung:
- Prüfen Sie vor jedem Start den festen Sitz der Rotorblätter
und aller sicherheitsrelevantenT eilen - insbesondere vor der
ersten Inbetriebnahme oder nach dem Transport, härteren
Landungen sowie Abstürzen. Prüfen Sie ebenfalls vor jedem
Start die einwandfreie Funktion Ihrer Fernsteuerung und die
Stromversorgung.
- Fassen Sie nie in den Drehkreis der Rotoren. Hier besteht
beim Betrieb erhebliche Verletzungsgefahr . Unter anderem
können Gliedmaßen abgeschlagen werden.
- Sie sind allein für alle Folgen die durch den Betrieb Ihres
Modells entstehen können voll verantwortlich und sollten für
alle Fälle versichert sein (Eine normale Privat-Haftpflichtversicherung ist nicht ausreichend)
- Informieren Sie alle Zuschauer vor der Inbetriebnahme über
die möglichen Gefahren und bitten Sie um einen ausreichenden Mindestabstand.
- Ein beschädigtes Modell darf erst nach vollständiger Beseitigung aller Mängel wieder in Betrieb genommen werden.
- Niemals Personen oder Tiere überfliegen oder auf diese zufliegen.
- Zur Reparatur des Modells dürfen nur Original-Ersatzteile verwendet werden. Nur bei der Verwendung von Originalteilen
4
Machen Sie sich mit dem Modell vertraut!
MULTIPLEX - Modellbaukästen unterliegen während der Produktion einer ständigen Materialkontrolle. Wir hoffen, dass Sie
mit dem Inhalt zufrieden sind. Wir bitten Sie jedoch, alle T eile
(nach Stückliste) vor der Verwendung zu prüfen, da bearbei-
tete und benutzte Teile vom Umtausch ausgeschlossen
sind. Sollte ein Bauteil einmal nicht in Ordnung sein, sind wir
nach Überprüfung gerne zur Nachbesserung oder zum Umtausch bereit. Bitte senden Sie das Teil an unsere Modellbauabteilung und fügen Sie unbedingt den Kaufbeleg und die
beiliegende,vollständig ausgefüllte Reklamationsmeldung
bei.
Wir arbeiten ständig an der technischen Weiterentwicklung
unserer Modelle. Änderungen des Baukasteninhalts in Form,
Maß, Technik, Material und Ausstattung behalten wir uns jederzeit und ohne Ankündigung vor . Bitte haben Sie Verständnis dafür, dass aus Angaben und Abbildungen dieser Anleitung keine Ansprüche abgeleitet werden können.
Das Modell hat, wie jedes Fluggerät, statische Grenzen!
Extreme Belastungen und unsinnige Manöver im Unverstand können zum Verlust des Modells führen. Beachten
Sie: In solchen Fällen gibt es von uns keinen Ersatz. Tasten Sie sich also vorsichtig an die Grenzen heran.
Wartungshinweise
Zwischen den Kegelrädern (vorne: 72, 73 / hinten: 74, 75) und
den Endbuchsen des Heckauslegers befinden sich zwei Unterlegscheiben. Diese sollten in regelmäßigen Abständen mit
einem Tropfen Silikonöl versehen werden. Ebenso sollten Sie
die Zahnräder mit etwas Getriebefett versehen. Achten Sie
darauf, dass die verwendeten Betriebsmittel kunststofftauglich
sind.
1. Inbetriebnahme
Prüfen Sie vor der Inbetriebnahme den Inhalt Ihres Sets.
Hinweis: Das Modell ist werksseitig vormontiert, jedoch liegt
die Verantwortung für die Endmontage und für den Betrieb ausschließlich bei Ihnen. Prüfen Sie also vor dem
Betrieb jede Schraube und alle Einstellungen, insbesondere
die Einstellung der Servos und deren Drehrichtung.
2. Fertigstellung
Je nach V ariante, sind noch neben der Kontrolle, Restarbeiten
notwendig.
AK (AssembledKit)= hier müssen alle Fernsteuerkomponenten
eingebaut werden.
Mit den empfohlenen Komponenten ist das Modell erprobt und
alles passt zueinander. W enn Sie eigene Ausrüstungsteile verwenden, liegt das in Ihrer Verantwortung und Ihrem Ermessen.
RR (Ready for Radio)= hier ist nur noch der Empfänger einzu-
bauen. Befestigen Sie alle freien Kabel mit den beiliegenden
Kabelbindern und achten Sie darauf, dass diese sich nicht im
Getriebe oder Gestänge verklemmen können.
Page 5

Das Modell ist für LiPo Antriebsakkus 3S - 11,1 V ausgelegt
(Dauerblastbarkeit mind. 35A). Benutzen Sie vorzugsweise die
von uns empfohlenenAkkus. Hier stimmt das Preis/Leistungsverhältnis und sie passen perfekt zum System. Sollten Sie
dennoch auf andere Akkus zurückgreifen, beachten Sie unbedingt die korrekte Schwerpunktlage.
Vor jeder Inbetriebnahme ist der Antriebsakku vollständig mit
einem geeigneten Ladegerät aufzuladen.
3. Funktionskontrolle und Einstellungen
Sie benötigen zur Steuerung des Modells mindestens eine 4
Kanal Fernsteuerung, ohne jeden Mischer. Schließen Sie die
Anlage nach Angaben des Herstellers an.
Zur Sicherheit demontieren Sie für den ersten Versuch
die Hauptrotorblätter und halten Sie das Modell an der
Akkurutsche fest!
Stellen Sie sicher, dass der Motor beim Einschalten nicht
anläuft!
Wenn Sie die Funktion des Heckrotors bei laufendem
Motor testen wollen, solange der Hauptrotor nicht montiert ist, arbeiten Sie nur mit einer sehr geringen Drehzahl. Der Hauptrotor bremst das System ab. Der Heckrotor kommt ohne montierten Hauptrotor in Drehzahlbereiche, die jenseits der Belastbarkeitsgrenze liegen!
Schäden und Verletzungen können bei zu hoher Drehzahl die Folge sein!
Wenn alle Trimmungen am Sender auf „Neutral“ stehen, sollten die Servohebel ebenfalls in der vorgegebenen Mittelstellung befinden und die T aumelscheibe soll gerade stehen. Falls
das nicht der Fall ist, justieren Sie an den Gestängeanschlüssen
nach.
Wenn Sie „Roll“ rechts geben neigt sich die Taumelscheibe
nach rechts. Nach links sinngemäß.
Bei „Nick“ Knüppel nach vorn kippt die Taumelscheibe nach
vorn. Nach hinten sinngemäß.
MechanischeAbstimmung:
Der FunCopter ist optimal für den Anfänger eingestellt. Möchten Sie das Modell agiler machen, besteht die Möglichkeit die
Gestänge in den äußeren Bohrungen der Servoarme einzuhängen (Achtung! Größere Kräfte wirken auf die Servos! Bei
Bodenkontakt mit dem Rotor besteht so viel mehr die Gefahr,
dass die Servos beschädigt werden.), und die Z-Drähte (32)
am Rotorkopf nach außen zu versetzen.
Wenn Sie den Heckrotor (Gier) ansteuern - Knüppel nach
rechts - sollte sich das Gestänge nach hinten bewegen. Nach
links sinngemäß.
Stellen Sie das Heck so ein, dass Sie mechanisch den vollen
Weg nutzen. Muss der Weg begrenzt werden, empfehlen wir
bei Computer-Sendern dies über die Funktion „Dual Rate“ oder
„Wegbegrenzung“ einzustellen. Haben Sie diese Einstellmöglichkeit nicht, muss ggf. das Kardangelenk am Servoarm
weiter nach innen versetzt werden.
Der eingesetzte Kreisel wird im Headinglock Mode (bitte auch
die beiliegende Kreiselanleitung lesen!) betrieben.
Wenn Sie V ollausschlag auf eine Seite geben und anschließend den Steuerknüppel loslassen, würde im S tandard Mode
das Heckservo schnell in die Neutralposition zurückkehren,
sobald Sie den Knüppel loslassen.
ImHeadinglock Mode wird das Heckservo dazu neigen, bei
Vollausschlag zu verharren. Lassen Sie sich nicht verunsichern.
Stellen Sie fest, dass das Heck im Stillstand „hinausläuft“,
kontrollieren Sie den Trimmwert Ihres Hecksignals (für Computer-Anlagen: Es darf keine Mischung auf das Hecksignal
wirken, verwenden Sie für den FunCopter ein 4-Kanal-Flächenmodell-Programm).
Bei großen Temperaturunterschieden empfehlen wir Ihnen,
sowohl den Kreisel als auch den Empfänger vor dem Fliegen
für zirka 5 Minuten einzuschalten. Schalten Sie ihn danach
aus und anschließend wieder ein. Anschließend ist der
FunCopter flugbereit.
Die Wirkrichtung ist über REVERSE <—> den Schiebeschalter einzustellen:
Prüfen Sie die Wirkrichtung Ihres Kreisels durch ruckartiges
Drehen des Hubschraubers um die Hochachse. Wirkt der Kreisel in die falsche Richtung, ist die Stellung des Schiebeschalters REVERSE <—> verkehrt und z.B. mit einem Schraubendreher zu ändern. Der Schalter befindet sich an der rechten Gehäuseseite.
Vor Änderung der Schalterstellung unbedingt die RC-Anlage
ausschalten!
Hinweis
WeitereAngaben zum Kreisel finden Sie in der beigepackten
Anleitung.
4. Endkontrolle
a. Der Heckrotor soll leichtgängig beweglich sein.
b. Die Hauptrotorblätter wieder montieren. Die Blätter sollen
sich klemmfrei auf und ab bewegen lassen und in der Arbeitsposition einrasten.
c. Die Schwenkgelenke müssen genügend stramm und gleichmäßig angezogen sein, um das Vor- oder Zurückfallen nur
durch die Schwerkraft zu verhindern.
d.Alle elektrischen Verbindungen müssen 100%igen Kontakt
haben. Die Stecker müssen vollständig eingesteckt sein und
lose Kabel mit Kabelverbindern gesichert sein.
e. Die Kabine muss eingerastet sein.
f. Den Schwerpunkt überprüfen. Dazu den Hubschrauber zwischen zwei Fingern am Hilfsrotor anheben.Der Hubschrauber
soll sich so auspendeln, dass das Heckrohr sich horizontal
ausrichtet. Korrekturen sind i.d.R. durch verschieben des Antriebsakkus möglich. Wenn nicht - Ballast zufügen.
g. Kontrollieren Sie nach 5 - 10 St d. Betriebszeit die Unterlegscheiben 118 und tauschen Sie diese bei Verschleiß aus.
5. Reichweitentest
Für den Reichweitentest sollten Sie unbedingt die Rotorblätter
am Blatthalter abmontieren. Sollte während des Tests eine
Störung auftreten, die den Motor ungewollt anlaufen lässt, ist
die Gefahr jemanden zu verletzen oder etwas zu beschädigen
stark minimiert. Es empfiehlt sich das Modell für den
Reichweitentest auf einen Tisch zu stellen. Steht das Modell
auf dem Boden, wird das zur Verfälschung des Ergebnisses
führen.
Führen Sie auf jeden Fall einen Reichweitentest mit laufendem und stehendem Motor durch. Ein Hubschrauber darf kei-
nes Falls am Boden befestigt werden, das kann Resonanzen
hervorrufen, die das komplette Modell zerstören können. Bitten Sie einen Helfer darum, beim Modell zu bleiben und Ihnen
mitzuteilen, ob „Servozucken“ auftritt, während Sie sich mit
dem Sender entfernen. Den Reichweitentest selbst führen Sie
nach den Vorgaben des Fernsteuerherstellers durch.
5
Page 6

6. Erstflug
Für den Erstflug warten Sie einen möglichst windstillen Tag
ab.Am besten fliegen Sie Ihr Modell auf einem zugelassenen
Modellflugplatz. Erstens schon aus rechtlichen Gründen und
außerdem finden Sie oft, insbesondere als Einsteiger , entsprechende Hilfe.
Empfehlenswert ist es auch ein Trainingsgestell zu montieren, damit der Hubschrauber nicht so leicht umkippen kann.
Stellen Sie den Hubschrauber ca. 5 m vor sich gegen den
Wind auf. Kurzer Rasen oder ein Hartplatz ist vorteilhaft - die
Kufen verhängen sich nicht so leicht und der Heckrotor kann
frei laufen.
Nach einer letzten Funktionskontrolle geben Sie vorsichtig
„Gas“, bis sich der Hubschrauber entlastet und prüfen vorsichtig die Funktionen und deren Trimmung.
Bei den ersten Versuchen lassen Sie den Hubschrauber nicht
höher als 1 bis 1,5 m steigen, rutschen Sie aber auch nicht
auf dem Boden umher. Fliegen Sie auch nicht weiter als 10-20
m weg von Ihrem Standort.Aus Sicherheitsgründen sollten
Sie auch zu sich selbst nicht dichter als 5 m heranfliegen.
Wenn es kritisch wird, setzen Sie den Hubschrauber ab. Bedienen Sie das „Gas“ nicht zögerlich aber keinesfalls hektisch.
Oft ist es sicherer , wenn ein Absturz oder eine harte Landung
nicht mehr zu vermeiden ist, einfach den Motor vollständig
auszuschalten. So „überlebt“ das Modell den S turz in der Regel mit den geringsten Schäden.
7. Erster Rundflug
Wenn Sie einigermaßen sicher vor sich schweben können,
wechseln Sie Ihre Position. Stellen Sie sich seitlich neben
den Hubschrauber . Wieder in ca. 5 m Abstand und schweben
Sie aus dieser Position. Nun versuchen Sie langsam vorwärts
zu fliegen. Der Hubschrauber soll zu Ihnen immer die gleiche
Position haben. Halten Sie den Abstand und die Höhe und
drehen Sie sich mit dem vorwärts fliegenden Hubschrauber
mit. Wenn der erste Kreis nicht gleich gelingt, ist dieses kein
Problem. Hubschrauber absetzen und erneut versuchen. Beim
FunCopter ist zu berücksichtigen, dass er bei Sinkflügen die
T endenz hat sich aufzubäumen. Seien Sie darauf gefasst und
drücken Sie etwas nach. Sollte Ihnen das Aufbäumen zu heftig werden, reduzieren Sie die Sinkgeschwindigkeit.
Achten Sie bei Sinkflügen darauf, dass Sie niemals den Motor
komplett abstellen. Wird eine sehr geringe Grunddrehzahl unterschritten, ist es möglich, dass die Rotorblätter durch den
Fallwind nach oben klappen, was nicht mehr korrigiert werden
kann.
8. Achten fliegen
Die nächste Hürde ist das „Auf sich zufliegen“. Um die Sache
zu erleichtern, fliegen Sie vor sich Achter; immer gegen den
Wind. Sie werden bemerken, dass es deutlich schwerer ist
als um sich selbst zu fliegen. Fliegen Sie zunächst einfach
links / rechts dann flache Achten und je geübter Sie werden,
um so runder und größer können die Achtenkreise werden.
9. Landen und Notlanden
Landen aus dem Schweben ist am einfachsten. Nehmen Sie
einfach das Gas vorsichtig, langsam zurück und warten Sie
die Reaktion ab - sinkt der Hubschrauber zu schnell zum Abfangen muss wieder etwas Gas geben. Alles geschieht ohne
Hektik.
Aus Vorwärt sfahrt das Gas zurücknehmen den Hubschrauber
mit Nick (nach hinten) ausbremsen und zum Übergang in den
Schwebeflug wieder vorsichtig Gasgeben - dann weiter wie
beim Landung aus dem Schweben.
Falls es wirklich kritisch wird und ein Absturz oder eine harte
Landung nicht mehr zu vermeiden ist, ist es oft günstiger den
Motor vollständig auszuschalten. So hat das Modell eine größere Überlebenschance, als wenn der Rotor unter Last auf ein
Hindernis trifft.
10. Vibrationen
Der FunCopter ist ein drehzahlgesteuerter Hubschrauber, daher befindet er sich, je nach Flugzustand, permanent in unterschiedlichen Drehzahlbereichen. Bei einem Sinkflug kann die
Rotordrehzahl so gering werden, dass das Modell in seinen
Resonanzbereich kommt und anfängt zu vibrieren. Keine Panik! Erhöhen Sie die Drehzahl, bis sich der FunCopter wieder
„beruhigt“, das wird recht schnell geschehen.
BeimAnlaufen lassen des Rotors ist es normal, dass der Heli
kurz schüttelt, hier gerät er in eine Bodenresonanz, die sofort
beendet wird, indem die Drehzahl zügig angehoben wird.
Beobachten Sie nach einem Absturz oder T ransportschaden
Vibrationen während des gesamten Flugs, ist etwas nicht in
Ordnung. Kontrollieren Sie, ob die Hauptrotor- oder Heckrotorwelle verbogen ist, indem Sie die Wellen ausbauen und
auf einer glatten Tischplatte rollen lassen. S tellen Sie minimale Verformung fest, sind die W ellen auszutauschen.
Zwar ist es durch aus noch möglich mit dem Modell zu fliegen, wenn es vibriert, jedoch werden vor allem elektronische
Bauteile bei Vibrationen stark belastet und können auf Dauer
Schaden nehmen. Vibriert das Modell, obwohl kein Absturz
vorausgegangen ist, kann es erforderlich sein die Rotorblätter
nachträglich auszuwuchten. Bringen Sie im Bereich des Blattschwerpunktes (am äußeren Ende des aufgespritzten
Turbulators - erhabener Kunststoffsteg - auf der Blattoberseite)
so viel Klebeband an, bis die Rotorblätter aufs Zehntel Gramm
genau ausgewogen sind.
11. Sicherheit
Sicherheit ist das oberste Gebot beim Fliegen mit Flugmodellen. Eine Haftpflichtversicherung ist obligatorisch. Falls
Sie in einen Verein oder V erband eintreten, können Sie diese
Versicherung dort abschließen. Achten Sie auf ausreichenden Versicherungsschutz (Modellflugzeug mit Antrieb).
Halten Sie Modelle und Fernsteuerung immer absolut in Ordnung. Informieren Sie sich über die Ladetechnik für die von
Ihnen verwendeten Akkus. Benutzen Sie alle sinnvollen Sicherheitseinrichtungen, die angeboten werden. Informieren Sie
sich in unserem Hauptkatalog; MULTIPLEX-Produkte sind von
erfahrenen Modellfliegern aus der Praxis für die Praxis gemacht.
Fliegen Sie verantwortungsbewusst! Anderen Leuten dicht über
die Köpfe zu fliegen ist kein Zeichen für wirkliches Können,
der wirkliche Könner hat dies nicht nötig. Weisen Sie auch
andere Piloten in unser aller Interesse auf diese T at sache hin.
Fliegen Sie immer so, dass weder Sie noch andere in Gefahr
kommen. Denken Sie immer daran, dass auch die allerbeste
Fernsteuerung jederzeit durch äußere Einflüsse gestört werden kann. Auch langjährige, unfallfreie Flugpraxis ist keine
Garantie für die nächste Flugminute.
12. Transport
Für den Transport des FunCopters liegt die Rotorblattflixierung
bei. Stecken Sie die nach hinten geklappten Rotorblätter in
die beiden Schlitze und schieben Sie die Rotorblattfixierung
mit der Aussp arung auf den Heckausleger. So können Sie den
FunCopter sicher und kompakt transportieren.
6
Page 7
Wir, das MUL TIPLEX -Team, wünschen Ihnen beim Bauen und
später beim Fliegen viel Freude und Erfolg.
MULTIPLEX Modellsport GmbH &Co. KG
Produktbetreuung und Entwicklung
Klaus Michler
Reparaturhinweise:
Das Modell ist zwar recht robust - aber es kann immer Mal
was passieren. Daher haben wir den Hubschrauber in 5 Baugruppen unterteilt.
1. Chassis mit Fahrgestell
2. Hauptrotor
3. Heckrotor
4. Heckrohr
5. Rumpf
Mit den grafischen Darstellungen sollte es immer leicht möglich
sein die entsprechenden Baugruppen zu demontieren und wieder zu montieren.
Folgende Ersatzteile werden angeboten:
Ersatzteile
Heckrotorblätter (1 Paar) # 22 3001
Hauptrotorwelle # 22 3002
Blatthalter 5° # 22 3003
Zahnrad-Set # 22 3004
Gestänge-Set # 22 3005
Rotorkopfhebel-Set # 22 3006
Taumelscheiben-Set # 22 3007
Nickwippen-Set # 22 3008
Servo-Ruderhebel-Set # 22 3009
Rotorkopf-Set # 22 3010
Hilfsrotor-Set # 22 3011
Heckrotorwelle # 22 3012
Heckrohr-Set # 22 3013
Heckanlenkungs-Set # 22 3014
Heckrotorgehäuse-Set # 22 3015
Chassis-Set # 22 3016
Kufenhalter (1 Paar) # 22 3017
Fahrgestell-Set # 22 3018
Dekorbogen # 22 3019
Rumpfverkleidung vorne + Scheiben # 22 3020
Rumpfverkleidung hinten + Leitwerke # 22 3021
Hauptrotorblätter (1 Paar) # 22 3022
Justagegelenk (1 Paar) # 22 3023
Rotorblattfixierung # 22 3024
Unterlegscheibe Ø7xØ2x0,3mm (10 Stk.) # 23 3025
Zentralstück einzeln # 22 3026
Heckrotorgehäuse mit Schaumteilen # 22 3027
Brushless-Motor (Himax C 6310-0225) # 22 3070
Tipps zur Einstellung des Senders:
Wenn Sie einen programmierbaren Sender nutzen, empfehlen wir folgende Einstellungen:
Für den FunCopter können Sie einen einfachen Flächenmodell-Speicher verwenden, um ungewollte Mischungen, die auf das Heck wirken, zu vermeiden.
Ein Hubschrauber-Programm ist nicht erforderlich.
Bei Nick“ („Höhe“) und „Roll“ („Quer“) können Sie nach eigenem Belieben Expo oder Dual Rate oder Wegbegrenzung beimischen, je nachdem, wie
empfindlich Ihr FunCopter reagieren soll. Für die Heckrotorfunktion sollten Sie lediglich mit Dual-Rate oder Wegbegrenzung arbeiten, um das Heck Ihren
Wünschen entsprechend anzupassen.
Als angenehm hat sich auch die Programmierung zweier Flugphasen erwiesen: Die erste für den Schwebeflug, in welcher der FunCopter so getrimmt
wird, dass er möglichst auf der Stelle schwebt. Die zweite Flugphase sollte mit einem kleinen T rimmwert nach vorn auf „Nick“ gespeichert werden. Somit
tendiert das Modell immer zum Vorwärtsflug, was den Rundflug komfort abler macht.
Folgende Werte empfehlen wir für MUL TIPLEX-Anlagen:
Funktion Flugphase „Schweben“ Flugphase „Rundflug“
Nick (Höhe) Expo: 30 %, Weg: 70 % Weg: 100 %, Trimmung ca. 5% vor
wärts / tief
Roll (Quer) Expo: 30 %, Weg: 70 % Weg: 100 %
Heck (Seite) Weg: 60 % Weg: 60 %
7
Page 8

Stückliste FunCopter
AK RR
Lfd. Stk Stk Bezeichnung Material Abmessungen enthalten im Ersatzteilpack
1 1 1 Anleitung Modell Papier
2 1 1 Anleitung Motor Papier
3 0 1 Anleitung Regler Papier
4 0 1 Anleitung Kreisel Papier
8 1 1 Inbusschlüssel Metall SW 1,5 mm
9 1 1 Inbusschlüssel Metall SW 2 mm
10 1 1 Inbusschlüssel Metall SW 2,5 mm
11 1 1 Inbusschlüssel Metall SW 3 mm
12 1 1 Inbusschlüssel Metall SW 4 mm
13 2 2 Justage-Gestänge Metall M2x12 Ø1,8 x 12 x 42,5mm # 223023 (2x)
14 2 2 Schraubkugelpfanne Kunststoff Fertigteil # 223023 (2x)
15 3 0 Klettband Pilzkopf Kunststoff 25 x 60 mm # 683112 (5x)
16 3 0 Klettband Velours Kunststoff 25 x 60 mm # 683112 (5x)
17 4 0 Kabelbinder Kunststoff 98 x 2,5mm
18 6 0 Schraube Servobefestigung Metall 2,2 x 13 mm # 682652 (50x)
20 3 3 Kardanbolzen Metall Drehteil Ø6mm # 223009 (1x)
21 2 2 Halteklammer Metall Stanzteil 1,5mm # 223016 (2x)
22 8 8 Kabelbinder Kunststoff 142 x 2,5mm # 223017 (4x);
23 2 2 Hexagon Einsatz Kegelrad Metall SW5,9 x Ø1,9 x 10,5mm # 223004 (2x)
24 1 1 Stellring S pinne Metall Ø8 x Ø3,2 x 5mm # 223014 (1x)
25 1 1 Hexagon Einsatz Hauptkegelrad Metall SW11,9 x Ø4,05 x 16mm # 223004 (1x)
26 3 3 Stellring Lager Metall Ø11 x Ø4,95 x Ø4,05 x 9,1mm # 223002 (1x);
27 1 1 Spinnenlagerhülse Metall Ø6 x Ø3 x Ø1,9 x 10mm # 223014 (1x)
28 1 1 Heckrotorwelle Metall Ø4 x SW4 x Ø1,9 x 51mm # 223012 (1x)
29 1 1 Heckrohr Metall
30 2 2 Fahrgestelldraht Federstahl Ø1,8 x 160 x 49mm # 223018 (2x)
31 1 1 Hauptrotorwelle Stahl gehärtet Ø4 x 200mm # 223002 (1x)
32 2 2 Hauptrotor Z-Draht Federstahl Ø1,8 x 16 x 19mm # 223005 (2x)
33 1 1 Heckgestänge Federstahl Ø1,8 x 537mm # 223013 (1x)
34 1 1 Heckwelle Federstahl Ø1,5 x 478mm # 223013 (1x)
35 2 2 Mischerarm-Gestänge Federstahl Ø1,8 x 45 x 14mm # 223005 (2x)
36 1 1 Nickgestänge Federstahl Ø1,8 x 75mm # 223005 (1x)
37 1 1 Heckrotorgestänge Federstahl Ø1,8 x 83 x 17mm # 223005 (1x)
38 1 1 Rollgestänge Federstahl Ø1,8 x 90 mm # 223005 (1x)
39 1 1 Seitenleitwerksdraht Federstahl Ø1,8 mm # 223015 (1x)
40 1 1 Stabilisatorgestänge Federstahl Ø1,8 x 215 mm # 22301 1 (1x)
Werkzeuge und Justagegelenke
Kleinteilesatz AK
Kleinteile (montiert)
# 223018 (8x)
# 223018 (8x)
# 223014 (2x)
SW12 x 0,4 x 450mm # 223013 (1x)
# 223012 (1x)
# 223014 (1x)
# 223027 (1x)
41L 1 1 Rumpf vorne links Kunststoff geschäumt Fertigteil # 223020 (1x)
41R 1 1 Rumpf vorne rechts Kunststoff geschäumt Fertigteil # 223020 (1x)
42L 1 1 Rumpf hinten links Kunststoff geschäumt Fertigteil # 223021 (1x)
42R 1 1 Rumpf hinten rechts Kunststoff geschäumt Fertigteil # 223021 (1x)
43L 1 1 Rumpf Führung links Kunststoff geschäumt Fertigteil # 223021 (1x)
43R 1 1 Rumpf Führung rechts Kunststoff geschäumt Fertigteil # 223021 (1x)
44L 1 1 Höhenleitwerk links Kunststoff geschäumt Fertigteil # 223021 (1x)
44R 1 1 Höhenleitwerk rechts Kunststoff geschäumt Fertigteil # 223021 (1x)
45L 1 1 Seitenleitwerk links Kunststoff geschäumt Fertigteil # 223021 (1x)
45R 1 1 Seitenleitwerk rechts Kunststoff geschäumt Fertigteil # 223021 (1x)
46 1 1 Blattfixierung Kunststoff geschäumt Fertigteil # 223024 (1x)
49 1 1 Dekorbogen bedruckte Klebefolie Fertigteil # 223019 (1x)
50 2 2 Hauptrotorblatt Kunststoff gespritzt Fertigteil # 223022 (2x)
51 1 1 Hilfsrotor Kunststoff gespritzt Fertigteil # 223011 (1x)
52 1 1 Wippe Kunststoff gespritzt Fertigteil # 223011 (1x)
53 1 1 Taumelscheibe Oben Kunststoff gespritzt Fertigteil # 223007 (1x)
54 1 1 T aumelscheibe Unten Kunststoff gespritzt Fertigteil # 223007 (1x)
55 4 4 Schnappkugelpfanne Kunststoff gespritzt Fertigteil # 223005 (4x)
56 1 1 Steuerstange Kunststoff gespritzt Fertigteil # 223006 (1x)
57 1 1 Rotornabe Kunststoff gespritzt Fertigteil # 223010 (1x)
59 2 2 Mischerarm Kunststoff gespritzt Fertigteil # 223006 (2x)
60 1 1 Verstellhebel Kunststoff gespritzt Fertigteil # 223006 (1x)
61 1 1 Verstellgelenk Kunststoff gespritzt Fertigteil # 223006 (1x)
62 1 1 Rotorjoch Kunststoff gespritzt Fertigteil # 223010 (1x)
Rumpfverkleidung + Dekorbogen (montiert)
# 223027 (1x)
# 223027 (1x)
Kunststoff-Spritzteile (montiert)
# 223026 (1x)
# 223010 (1x)
8
Page 9

AK RR
Lfd. Stk Stk Bezeichnung Material Abmessungen enthalten im Ersatzteilpack
63 1 1 Kufe links Kunststoff gespritzt Fertigteil # 223018 (1x)
64 1 1 Kufe rechts Kunststoff gespritzt Fertigteil # 223018 (1x)
65 1 1 Heckhalter hinten Kunststoff gespritzt Fertigteil # 223013 (1x)
66 1 1 Heckhalter vorne Kunststoff gespritzt Fertigteil # 223013 (1x)
67 3 3 Mittlere Lagerbuchse Kunststoff gespritzt Fertigteil # 223013 (2x)
68 2 2 Endlagerbuchse Kunststoff gespritzt Fertigteil # 223013 (2x)
69 1 1 Nickwippe links Kunststoff gespritzt Fertigteil # 223008 (1x)
70 1 1 Nickwippe rechts Kunststoff gespritzt Fertigteil # 223008 (1x)
71 1 1 Heckrohrklemme Kunststoff gespritzt Fertigteil # 223016 (1x)
72 1 1 Hauptkegelrad Kunststoff gespritzt Fertigteil # 223004 (1x)
73 1 1 Heckwellenkegelrad vorne Kunststoff gespritzt Fertigteil # 223004 (1x)
74 1 1 Heckwellenkegelrad hinten Kunststoff gespritzt Fertigteil # 223004 (1x)
75 1 1 Heckrotorwellenkegelrad Kunststoff gespritzt Fertigteil # 223004 (1x)
76 3 3 Ruderhebel Twin Kunststoff gespritzt Fertigteil # 223009 (1x)
77 2 2 Nickgelenk Kunststoff gespritzt Fertigteil # 223008 (2x)
78 2 2 Kufenhalter Kunststoff gespritzt Fertigteil # 223017 (2x)
79 1 1 Chassis Kunststoff gespritzt Fertigteil # 223016 (1x)
80 2 2 Heckrotorblatt Kunststoff gespritzt Fertigteil # 223001 (2x)
81 1 1 Heckrotorgehaeuse Kunststoff gespritzt Fertigteil # 223015 (1x)
82 1 1 Heckumlenkhebel Kunststoff gespritzt Fertigteil # 223014 (1x)
1 1 Steuerspinne Kunststoff gespritzt Fertigteil # 223014 (1x)
83
84 1 1 Heckrotorzentralstück Kunststoff gespritzt Fertigteil # 223014 (1x)
85 1 1 Lagerkopf Kunststoff gespritzt Fertigteil # 223016 (1x)
86 1 1 ScheibeLiHi Kunststoff gespritzt Fertigteil # 223020 (1x)
87 1 1 ScheibeReHi Kunststoff gespritzt Fertigteil # 223020 (1x)
88 1 1 ScheibeLiVo Kunststoff gespritzt Fertigteil # 223020 (1x)
89 1 1 ScheibeReVo Kunststoff gespritzt Fertigteil # 223020 (1x)
90 1 1 Haubenriegel Kunststoff gespritzt Fertigteil # 223020 (1x)
91 2 2 Blatthalter 5° => 5 Punkte Kunststoff Fertigteil # 223003 (2x)
# 223027 (1x)
95 8 8 Zylinderschraube Inbus Metall M2 x 6mm # 223007 (6x)
96 4 4 Zylinderschraube Inbus Metall M2 x 10mm # 223006 (2x)
97 5 5 Zylinderschraube Inbus Metall M2,5 x 12mm # 223016 (1x)
98 4 4 Zylinderschraube Inbus Metall M2,5 x 16mm # 223016 (4x)
99 3 3 Zylinderschraube Inbus Metall M3 x 12mm # 223010 (1x)
100 2 2 Zylinderschraube Inbus Metall M3 x 20mm # 223003 (2x)
101 2 2 Zylinderschraube Inbus Metall M4 x 8mm # 223016 (2x)
102 2 2 Zylinderschraube Inbus Metall M5 x 35mm # 223011 (2x)
103 2 2 Senkkopfschraube Metall M2,5 x 25mm # 223008 (2x)
104 3 3 Unterlegscheibe Metall Ø2,2 mm (M2) # 223006 (2x)
105 1 1 Unterlegscheibe Metall Ø3,2 mm (M3) # 223010 (1x)
106 2 2 Unterlegscheibe Kunststoff Ø3,2 mm (M3) # 223001 (2x)
107 10 10 Gewindestift Metall M3 x 3mm #
108 2 2 Gewindestift Metall M4 x 6mm # 223004 (2x)
109 6 6 Gewindestift Metall M3 x 16mm # 223001 (2x)
110 4 4 Gewindestift Metall M4 x 4 mm # 223022 (2x)
111 4 4 Zylinderstift gehärtet Metall Ø1,5m6 x 20mm # 223001 (2x)
112 1 1 Zylinderstift gehärtet Metall Ø2m6 x 16mm # 223006 (1x)
113 1 1 Zylinderstift gehärtet Metall Ø3m6 x 28mm # 223010 (1x)
114 3 3 Stoppmutter Metall M3 # 223010 (1x)
115 1 1 Dünnringlager (Radiallager) Metall Ø21 x Ø15 x 4mm # 223007 (1x)
116 1 1 Kugellager Metall Ø13 x Ø7 x 4mm # 223015 (1x)
117 3 3 Kugellager Metall Ø11 x Ø5 x 4mm # 223015 (1x);
118 2 2 Unterlegscheibe Kunststoff Ø7 x Ø2 x 0,3mm # 223004 (2x)
119 4 4 Stoppmutter Metall M2,5 # 223016 (4x)
Normteile (montiert)
# 223015 (1x)
# 223016 (1x)
# 223014 (1x)
# 223015 (1x)
# 223016 (2x)
# 223014 (1x)
223002 (2x)
# 223009 (1x);
# 223014 (3x)
# 223010 (2x)
# 223016 (2x)
# 223025 (10x)
120 1 1 Brushless Motor Himax C 6310-0225 Fertigteil # 333070 (1x)
RC-Teile (montiert)
121 0 3 Servo ohne Hebel / mit Schrauben Tiny-S Fertigteil # 65121 (1x)
122 0 1 Regler MULTIcont BL-37/II Fertigteil # 72276 (1x)
123 0 1 Kreisel + 2 Montagepads MULTIgyro 300DP Fertigteil # 75503 (1x)
15 0 3 Klettband Pilzkopf Kunststoff 25 x 6 0 mm # 683112 (5x)
16 0 3 Klettband Velours Kunststoff 25 x 60 mm # 683112 (5x)
17 0 4 Kabelbinder Kunststoff 98 x 2,5mm
18 0 6 Schraube Servobefestigung Metall 2,2 x 13 mm # 682652 (50x)
9
Page 10

Wichtiger Hinweis
Der Rumpf des Modells ist aus EPP! Daher sind Verklebungen mit Weißleim, Polyrurethan oder Epoxy nicht möglich.
Für die Verklebung des Materials emp fehlen wir die Verwendung von Heißkleber.
1. Vor dem Bau
Prüfen Sie vor Baubeginn den Inhalt Ihres Baukastens.
Dazu sind die Abb. 1+2 und die S tückliste hilfreich.
Beim Bau des Funcopters sind einige Kugelgelenke zu montieren. Stellen Sie fest, dass sich die Gelenke schwergängig
bewegen, können Sie Abhilfe schaf fen, indem Sie die Kugelpfannen mit einer Zange gefühlvoll etwas zusammendrücken.
überliegenden Seite mit der Aussparung am Chassis deckungsgleich liegt.
Abb. CH-08
Schrauben Sie nun die Halteklammer 21 auf der linken Seite
des Chassis 79 an. Und drehen Sie, ebenfalls mit etwas
Schraubensicherungslack, die Schraube M4 x 8 mm 101 hinein.
Abb. CH-09
2.5 Anbau des Landegestells
Hängen Sie das Landegestell in den Kufenhaltern ein.
Abb. CH-10
2. Bau der Mechanik
2.1 Bau des Landegestells
Abb. CH-01
Schieben Sie die Fahrgestelldrähte 30 in die beiden Kufen 63
und 64 ein und bringen Sie diese in die richtige Position.
Mit den vier Kabelbindern 22 fixieren Sie nun die Kufendrähte
an den dafür vorgesehenen Hutzen.
Abb. CH-02
2.2 Servoeinbau
Es folgt die Montage der drei Servos (Tiny-S, # 6 5121, alternativ Tiny-MG # 6 5122). Setzen Sie die Servos im Chassis 79
ein.Achten Sie darauf, dass das Heck-Servo (links) und das
Roll-Servo (rechts, hinten) so montiert werden, dass sich der
Zahnkranz oben befindet. Beim Nickservo (rechts, vorne) hat
der Zahnkranz unten zu sein. Die Servos werden mit jeweils
zwei Schrauben 2,2 x 13 mm 18 am Chassis angeschraubt.
Abb. CH-03
Stellen Sie sicher , dass die Servos in Neutrallage stehen. Nun
können die drei Ruderhebel Twin 76 montiert werden. Beim
Heckservo wird der Kardanbolzen 20 in die inneren Löcher
des Ruderhebels geklemmt, bei den übrigen Servos in die äußeren Löcher . In jeden Kardanbolzen ist ein Gewindstift M3 x
3 mm 107 – vorerst lose - einzuschrauben. Drücken Sie nun
die vormontierten Ruderhebel auf die Zahnkränze in ihrer jeweiligen Neutrallage auf und schrauben Sie sie mit den ServoSchrauben 2,3 x 5 mm fest. Der Ruderhebel des Heckrotors
soll nach oben, 10° nach vorne geneigt zeigen (siehe auch
Bauabschnitt 6.4), die Ruderhebel des Nick- und Rollservos
sind waagrecht, nach hinten zeigend anzubringen.
Abb. CH-04 & -05
Befestigen Sie die Fahrgestelldrähte mit den vier Kabelbindern
142 x 2,5 mm 22 mit den Kufenhaltern.
Abb. CH-11
2.6 Montage des Lagerkopfes
Setzen Sie das Kugellager Ø 1 1 x Ø 5 x 4 mm 117 in den
Lagerkopf85 ein.
Abb. CH-12
Mit den beiden Schrauben M3 x 12 mm 99 schrauben Sie den
Lagerkopf von links an den Dom des Chassis 79.
Abb. CH-13
2.7 Montage der Nickwippe
Schieben Sie die beiden Nickgelenke 77 auf die Nickwippe
links69
auf den Zapfen des Lagerkopfes. Von der rechten Seite her
wird jetzt die Nickwippe rechts 70 aufgesteckt. Mit den beiden
Schrauben M2,5 x 25 mm 103 werden die T eile der Nickwippe
miteinander gefügt. Achten Sie dabei auf Leichtgängigkeit.
Abb. CH-14
2.8 Montage des Gestänges
Arretieren Sie das Nick- 36 und Rollgestänge 38 in den
Schnappkugelpfannen55.
Abb. CH-15
2.9 Montage der Taumelscheibe
Drücken Sie das Dünnringlager Ø 21 x Ø 15 x 4 mm 115 in die
Taumelscheibe Oben 53 und drehen Sie die drei Schrauben
M2 x 6 mm 95 hinein. Tropfen Sie etwas Öl in das Dünnringlager.
Abb. CH-16
auf. Drücken Sie die vormontierte Nickwippe von links
2.3 Montage der Kufenhalter
Die beiden Kufenhalter 78 werden unten am Chassis 79 mit
jeweils zwei Schrauben M2,5 x 12 mm 97 befestigt.
Abb. CH-06 2.4 Motoreinbau
Legen Sie nun den Motor 120 so vor sich, dass die herausgeführten Kabel (oben) nach links in Ihre Richtung zeigen (zw.
7+8 Uhr-Position). Mit dem von oben gesehenen, rechten
Gewinde verschrauben Sie nun die erste der beiden Halteklammern 21 mit der Schraube M4 x 8 101. Lassen Sie die
Schraube vorerst locker.
Abb. CH-07
Schieben Sie den Motor mit der Halteklammer von rechts an
das Chassis 79 und ziehen Sie die Schraube unter der Verwendung von Schraubensicherungslack fest an. Richten Sie
den Motor dabei so aus, dass das Gewinde auf der gegen-
10
Drücken Sie nun die Taumelscheibe Unten 54 in die obere
Taumelscheibe. Mit drei weiteren Schrauben M2 x 6 mm 95
werden die beiden T aumelscheiben-Hälften zusammengefügt.
Achten Sie auch hier auf Leichtgängigkeit.
Abb. CH-17
Setzen Sie nun die Taumelscheibe auf das Kugelgelenk des
Lagerkopfes und drücken Sie die Nickgelenke 77 auf die äußeren Kugeln der T aumelscheibe.
Abb. CH-18
2.10 Einbau des Gestänges
Pressen Sie nun das Nickgestänge 36 auf das Kugelgelenk
der Nickwippe. Das Rollgestänge 38 wird auf die nach rechts
herausstehende Kugel der Taumelscheibe Unten gedrückt.
Führen Sie nun die Gestänge in die Kardanbolzen der Ruderhebel ein. Richten Sie die T aumelscheibe waagrecht aus und
Page 11

achten Sie darauf, dass auch die Ruderhebel in der Neutralposition stehen. Ist dies sichergestellt, können die Gewindestifte in den Kardanbolzen festgezogen werden. Verwenden
Sie hierfür Schraubensicherungslack.
Abb. CH-19
2.11 Einbau der Elektronik
Bringen Sie gemäß der Abbildung auf der linken Seite der
Mechanik Steller , Gyro und den Empfänger an. Hierfür eignet
sich doppelseitiges Isolierklebeband, damit werden Vibrationen
abgefangen und die Elektronik-Bauteile geschont.
Achten Sie beim Einbau des Gyros auf die korrekte Einbaulage. Beachten Sie hierfür die Anleitung des Gyros.
Zum Verlegen der Kabel liegen noch vier Kabelbinder 17bei.
Abb. CH-20
3 Bau des Hauptrotors
3.1 Rotorkopf-Montage
Die Steuerst ange 56 wird auf den Verstellhebel60 aufgeclipst.
Schieben Sie das Verstellgelenk61 in die hintere Aufnahme
des V erstellhebels und verbinden Sie die T eile mit dem Zylinderstift Ø 1,5m6 x 20 mm 111. Sichern Sie den Stift von einer
Seite her mit ein wenig Sekundenkleber. Achten Sie unbedingt darauf, dass der Sekundenkleber nicht in das Gelenk
läuft. Im Folgenden schieben Sie die Rotornabe 57 durch den
Verstellhebel. V erbinden Sie mit dem zweiten Zylinderstif t Ø
1,5m6 x 20 mm 111 Rotornabe und Verstellhebel miteinander .
Sichern Sie auch hier wieder mit Sekundenkleber.
Abb. MR-01
Als Nächstes wird das Rotorjoch 62 angebracht. Auf einer
Seite hat das T eil eine Aussparung, auf der anderen Seite sind
zwei kleine Taschen eingearbeitet. Stecken Sie das Teil nun
so auf die Rotornabe 57, dass die Steuerstange56 durch die
Aussparung ragt und die beiden T aschen unten sind. Mit dem
Zylinderstift Ø 3 x 28 mm 113 wird das Rotorjoch befestigt.
Treiben Sie den Stift so weit durch, dass er bündig mit der
Öffnung der Steuerstange ist. Der S tift sollte keinesfalls in die
Öffnung hineinragen.
Abb. MR-02
Die Wippe 52 wird zwischen den Lagerböcken der Rotornabe
positioniert und mit dem Zylinderstift Ø 2m6 x 16 mm 112
befestigt. Verwenden Sie auch hier zur Sicherung etwas
Sekundenkleber und achten Sie auf Leichtgängigkeit.
Abb. MR-03
Die Blatthalter 91 müssen so angebracht werden, dass die
angespritzten Punkte, die die Steigung markieren (5°), von oben
zu sehen sind. Um die Blatthalter zu befestigen nehmen Sie
die beiden Zylinderschrauben M3 x 20 mm 100.
Abb. MR-04
3.2 Anlenkung und Mischer
Arretieren Sie an den beiden Mischarm-Gestängen 35 jeweils
die Schnappkugelpfannen 55.
Abb. MR-05
Die beiden Mischerarme 59 werden mit den Schrauben M2 x
10 mm 96 an der Wippe befestigt. Dabei zeigt die flache Seite
der Mischerarme Richtung Wippe. Bevor Sie die M2-Schrauben komplett hineindrehen, werden in die äußeren Bohrungen
die Hauptrotor-Z-Drähte 32 geschoben und in die inneren Bohrungen die Mischerarmgestänge 35. Die Z-Drähte werden auf
der anderen Seite in das außen liegende Loch am Rotorjoch
gesteckt. Zwischen Schraubenkopf und Mischerarm ist jeweils die Unterlegscheibe Ø 5 x Ø 2 x 0,3 mm 104 anzubringen.
Stecken Sie nun den abgekröp ftenTeil der Mischarmgestänge
durch die äußere Bohrung der Mischerarme.
Abb. MR-06
3.3 Hilfsrotor
Die beiden Zylinderschrauben M5 x 35 mm 102 dienen als
Fliehgewichte und werden in die Blattspitzen des Hilfsrotors
51 eingeschraubt. Eine davon nicht ganz hineindrehen, damit
im nächsten Schritt die Stabilisatorstange montiert werden
kann.
Abb. MR-07
Der Hilfsrotor wird auf die Wippe gesetzt und die S tabilisatorstange40 durch die dafür vorgesehene Bohrung geschoben,
um eine Verbindung zum Rotorkop f herzustellen. Nutzen Sie
einen dünnen Draht oder Ähnliches, um die Stabilisatorst ange
bis zum Anschlag durch zu schieben. Danach drehen Sie die
noch nicht angezogene M5 x 35-Schraube hinein. Verbinden
Sie die S teuerstange56 mit dem Hilfsrotor.
Abb. MR-08
3.4 Montage Hauptrotorwelle
Die Hautrotorwelle
schoben. Dabei muss die Kerbe, die der Arretierung in der
Rotornabe dient, nach oben zeigen. Schauen Sie nun durch
die Bohrung in der Rotornabe und positionieren Sie die Welle
so, dass die Schraube M3 x 12 mm 99 ungehindert gefügt
werden kann. Zwischen Schraubenkopf und Rotornabe ist die
Unterlegscheibe Ø 6 x Ø 3,2 x 0,3 mm 105 anzubringen. Mit
der S toppmutter M3 114 ziehen Sie die Schraube an.
Abb. MR-09 & -10
4 Bau des Heckrotors
4.1 Heckrotorwelle
Abb. TR-01
Schieben Sie unter Beachtung der Maße in der Abbildung das
Heckrotorwellenkegelrad75 auf die Heckrotorwelle 28.
4.2 Montage des Heckrotorgehäuse
Abb. TR-02 & TR-03
Setzen Sie im nächsten Schritt das Kugellager Ø 1 1 x Ø 5 x 4
mm 117 in das Heckrotorgehäuse 81 auf der rechten Seite
ein. Schieben Sie die mit dem Kegelrad versehene Heckrotorwelle von links in ihren Schacht, durch das vorher montierte
Kugellager und setzen Sie das Kugellager Ø 13 x Ø 7 x 4 mm
116 von links ein.
4.3 Montage des Heckrotors
Abb. TR-04, -05 & -06
Setzen Sie zwischen die angeformten Blatthalter der beiden
Heckrotorblätter80 das Heckrotorzentralstück 84 mit den beiden Unterlegscheiben Ø 6 Ø 3 x 0,3 mm 106 ein. Achten Sie
dabei darauf, dass die Heckrotorblätter richtig herum montiert
werden. Von links betrachtet dreht sich der Heckrotor im Uhrzeigersinn.
Mit den zwei Gewindestiften M3 x 16 mm 109 werden die
Bauteile verbunden.
Als nächstes bauen Sie die S teuerspinne 83 ein. Diese wird
an ihren Enden mit den angeformten Blatthaltern der Heckrotorblätter verstiftet. Nehmen Sie dazu die beiden Zylinderstifte Ø 1,5 x 20 mm 111.
Abb. TR-07
Schieben Sie nun den vormontierten Heckrotor auf die Heckrotorwelle soweit auf, dass das Heckrotorzentralstück fest im
linken Kugellager 116 sitzt. Die Gewindestifte 109 werden jetzt
so stark angezogen, dass der Heckrotor, sicher und fest auf
der Welle sitzt.
31 wir von unten in die Rotornabe 57einge-
11
Page 12

4.4 Arretierung der Heckrotorwelle
Abb. TR-08
Schieben Sie nun den Stellring Lager 26 auf die Heckrotorwelle von rechts auf. Es sollte kein Axialspiel vorhanden sein.
Ist dies sichergestellt, befestigen Sie den Stellring mit den
beiden Gewindestiften M3 x 4 mm 107 unter V erwendung von
Schraubensicherungslack.
4.5 Hecksteuerung einbauen
Abb. TR-09
Zunächst ist die Spinnenlagerhülse27 von der Innenseite her
durch die zentrale Bohrung der Steuerspinne auf Anschlag zu
schieben. Von der anderen Seite schieben Sie nun den S tellring Spinne24 auf und befestigen Sie diesen mit dem Gewindestift M3 x 3 mm 107, der Stift ist mit Schraubensicherungslack zu sichern. Stellen Sie sicher , dass sich die S teuerspinne
auf der S pinnenlagerhülse möglichst widerstandsfrei drehen
kann. Schieben Sie jetzt das Heckrotorgestänge 37 von rechts
durch die Heckrotorwelle. Reiben Sie das Gestänge mit Fett
ein, damit das System möglichst reibungsfrei läuft.
4.6 Heckumlenkhebel anbringen
Abb. TR-10
Mit der Schraube M2 x 10 mm 96 und der dazugehörigen Unterlegscheibe Ø 5 x Ø 2,2 x 0,3 mm 104 wird der Heckumlenkhebel 82 angebracht. Stecken Sie den abgekröpftenT eil des
Heckrotorgestänges in die Bohrung des kürzeren Hebels ein.
Achten Sie auch hier auf eine gute Beweglichkeit bei möglichst geringem Spiel.
4.7 Heckrotorschutz
Schieben Sie den Seitenleitwerksdraht 39 in die Aussparungen des Heckrotorgehäuses 81 ein und befestigen Sie ihn mit
etwas Sekundenkleber.
Abb. TR-11
4.8 Kontrolle des Zusammenbaus
Abb. TR-12
Kontrollieren Sie, nachdem das Heck nun mechanisch fertiggestellt ist, ob die Teile richtig montiert sind anhand der Abbildung.Achten Sie darauf, dass die Bauteile im richtigen Winkel zueinander stehen, die Drehrichtung des Heckrotors stimmt
und dass das System sich leichtgängig bewegen lässt. Bewegen Sie für die Funktionsüberprüfung den Umlenkhebel an
seinem langen Arm, an dem später das Heckgestänge eingehängt wird.
Als Nächstes stecken Sie die Endlagerbuchsen 68 in die En-
den des Heckrohrs.
Abb. TB-03
Bringen Sie im nächsten Schritt das vordere Heckwellenkegelrad 73 an dem Rohrende an, an dem die Bohrung im
Heckrohr 41 mm vom Beschnitt entfernt ist. Die hintere Bohrung hat einen Abstand von nur 20,5 mm zum Beschnitt. Hier
wird das hintere Heckwellenkegelrad 74 befestigt. Zwischen
den Heckkegelrädern und den Endlagerbuchsen sind die Unterlegscheiben118 einzusetzen. V ersehen Sie die Gewindestifte
110 in den Kegelrädern mit Schraubensicherungslack und ziehen Sie diese auf der Heckrotorwelle gut an. Achten Sie dabei
auf Leichtgängigkeit und darauf, dass möglichst wenig Axialspiel aufkommt.
Abb. TB-04 & -05
6 Endmontage
6.1 Hauptkegelrad-Montage
Drücken Sie den Hexagon-Einsatz 25 in das Hauptkegelrad
72.Achten Sie darauf, dass die Gewinde deckungsgleich mit
den Durchgangsbohrungen für die zwei M4 x 6 mm Gewindestifte 108 liegen und schrauben Sie diese schon einmal ein.
Abb. AS-01
6.2 Hauptrotorwelle – Einbau
Bereiten Sie zwei Stellringe Lager 26 vor, indem Sie jeweils
zwei Gewindestifte M3 x 3 mm 107 einschrauben.
AS-02
Drücken Sie nun den ersten Stellring Lager 26 mit dem Bund
nach unten in das Kugellager 117 und setzen Sie die gefügten
Teile in die halbierte Aussparung in der Mitte der Mechanik
ein.
Abb. AS-03
Schieben Sie den Bund des zweiten Stellring Lager 26 von
unten durch das obere Kugellager und setzen Sie das Hauptkegelrad auf den Stellring in der Mitte der Mechanik. Schieben
Sie den Rotorkopf so weit nach unten, bis die Hauptrotorwelle
auf der Unterseite des Motors zu sehen ist.
Abb. AS-04
Hängen Sie die Kugelgelenke des Rotorkopfes an der oberen
T aumelscheibe ein.
Abb. AS-05
Abb.
5 Bau des Heckrohrs
5.1 Vormontage der Heckwellenkegelräder
Abb. TB-01
In die beiden Heckwellenkegelräder (vorne 73 & hinten 74) wird
jeweils der Einsatz Kegelrad 23 eingeschoben. Achten Sie
auf die korrekte Ausrichtung der Bohrungen beim Zusammenfügen. Beidseitig werden die Gewindestifte M4 x 4 mm 110 –
vorerst lose - eingeschraubt.
5.2 V ormontage des Heckrohrs
Abb. TB-02
Schieben Sie auf die Heckwelle 34 die mittleren Lagerbuchsen 67 auf. Die Lagerbuchsen werden von den Enden des
Heckrohrs 29 gemäß der Abbildung. Am besten ist das zu
bewerkstelligen, indem Sie Rohre (nicht im Baukasten enthalten) entsprechend ablängen und damit die Lagerbuchsen, bis
die Enden von Heckrohr und dem „Hilfsrohr“ bündig sind, einschieben.
12
Ziehen Sie nun die Gewindestifte der Stellringe und der W ellenaufnahme des Motors M3 x 3 mm unter Verwendung von
Schraubensicherungslack fest an. Die Gewindestifte des Hauptkegelrads werden später angezogen.
Abb. AS-06
6.3 Heckausleger anbringen
Setzen Sie den Heckausleger in das Chassisteil ein, so
dass das Kegelrad des Heckabtriebs in die Zähne des
Hauptkegelrades hineingreift.
Abb. AS-07
Mit der Schraube M 2 x 6 mm 95 wird das Heckrohr gegen
Verschiebung in Längsrichtung gesichert. Sie wird von rechts
eingeschraubt.
Abb. AS-08
Mit den Schrauben M 2,5 x 16 mm (4x 98) und M 2,5 x 12 mm
(1x 97) befestigen Sie die Heckrohrklemme 71 und klemmen
damit das Heckrohr fest.
Page 13

Das Zahnflankenspiel zwischen Hauptkegelrad und Heckabtrieb stellen Sie ein, indem Sie das Hauptkegelrad in der Höhe
verschieben.Achten Sie auch hier auf Leichtgängigkeit.
Tipp: Um das richtige Zahnflankenspiel einzustellen, klemmen
Sie etwas Löschpapier zwischen die Zähne der Kegelräder.
Ziehen Sie dann die Gewindestifte des Hauptkegelrades an
und entfernen Sie das Papier. Verwenden Sie hier auch
Schraubensicherungslack.
Abb. AS-09
6.4 Heckrotor anbringen
Schieben Sie nun den Heckhalter vorne 66 und den Heckhalter hinten 65 auf das Heckrohr so auf, dass die kleinen
Bohrungen nach unten zeigen.
Stecken Sie das vormontierte Heckrohr in das Heckgehäuse.
Die Bohrung (Abstand 20,5 mm vom Rohrende) muss dekkungsgleich mit der entsprechenden Bohrung im Heckgehäuse
positioniert werden. Mit der Schraube M2 x 10 mm 96 klem-
men Sie das Heckgehäuse am Heckrohr fest. Die Schraube
M2 x 6 mm 95 stellt sicher, dass keine Verschiebung in Längsrichtung auftritt.
Abb. AS-10
Um den Heckrotor anzusteuern, V erbinden Sie den Umlenkhebel mit dem Servo, indem Sie das Heckgestänge 33 einbauen. Führen Sie dieses von hinten durch die beiden Heckhalter. Schieben Sie das Gestänge auch durch den
Kardanbolzen des Heck-Servo-Arms. Schrauben Sie ihn noch
nicht fest. Der abgekröpfteT eil des Gestänges wird zunächst
von oben her in den Umlenkhebel gesteckt. Richten Sie den
Heckrotor in seine Neutrallage aus. Jetzt stellen Sie Ihr
Heckservo so ein, dass sich der Neutralpunkt des Servoarms
10° nach links geneigt – Heli von der linken Seite betrachtet –
befindet. Ziehen Sie nun den Gewindebolzen mit Schraubensicherungslack im Kardangelenk fest an.
Abb.AS-11
schobenen Heckhalter seitlich aufgedrückt.
Abb. AS-17
Den zusammengeklebten Vorderrump f schieben Sie auf die
angeformten Schienen des Chassis auf. Um den Vorderrump f
wieder abzunehmen, drücken Sie von unten auf den Haubenriegel und ziehen ihn nach vorne.
Abb. AS-18
9 Schwerpunkt
Der Schwerpunkt sollte für den Schwebeflug auf der Achse
der Hauptrotorwelle liegen. Für Rundflüge empfehlen wir eine
kopflastige Schwerpunktlage. Die Schwerpunktlage wird durch
die Positionierung des Akkus beeinflusst.
Abb. CG (unter Schnellstart)
7 Hauptrotorblätter
Mit den vier Gewindestiften M3 x 16 mm 109 bringen Sie die
Hauptrotorblätter50 an den Blatthaltern an.
Abb. AS-12
8 Rumpfmontage
Verkleben Sie die vorderen Rumpfhälf ten41L & 41R und kle-
ben Sie dabei den Haubenriegel 90 in die dafür vorgesehenen
Aussparungen ein. Die Scheiben (86, 87, 88, 89) werden ebenfalls eingeklebt.
Abb. AS-13
Kleben Sie auf der Innenseite der hinteren Rumpfhälften 42L
&42R die Rumpfführungen 43L und 43R ein. Kleben Sie auch
die Höhenleitwerke 44L & 44R an.
Abb. AS-14
Von der linken Rump fhälfte ist der S teg, unterhalb des Durchgangs für das Heckgehäuse mit einem scharfen Bastelmesser
zu entfernen.
Abb. AS-15
Die Seitenleitwerkshälften 45L & 45R werden nur mit dem
Heckrotorgehäuse verklebt, später jedoch
ren Rumpfhälften.
Abb. AS-16
Die hinteren Rumpfhälften werden auf die am Heckrohr aufge-
nicht mit den hinte-
13
Page 14

DEMARRAGE RAPIDE
Lisez soigneusement les consignes de sécurités avant toute utilisation de ce modèle!
En fonction de la version de votre FunCopter, il faudra encore mettre en place des composants électroniques.
Eléments de radiocommande pour le modèle FunCopter:
AK = Assembled Kit - RR = Ready for Radio
Pour la version AK:
ServoTiny-S 3x nécessaire (Roll, Nick, Gier) Nr . Com. 6 5121
Ou Servo Tiny-MG 3x nécessaire (Roll, Nick, Gier) Nr. Com. 6 5122
GyroscopeMUL TIgyro 300DP Nr. Com. 7 5503
RégulateurMULTIcont BL-37/II Nr. Com. 7 2276
Pour la version AK et RR:
RécepteurRX-6-SYNTH light 35 MHz Bande A Nr. Com. 5 5876
alternative 40/41Mhz Nr. Com. 5 5877
ou RécepteurRX-7 DR Light M-Link 2,4GHz Nr. Com. 5 5810
(uniquement si vous utilisez un émetteur Multiplex 2,4GHz)
F
Accu de propulsion conseillé:
Li-BA TT FX 3/1-3200mAh Nr. Com. 15 7371
Li-BA TT BX 3/1-3200mAh Nr. Com. 15 7136
Li-BA TT eco 3/1-3000mAh Nr. Com. 15 7236
Chargeur:
MUL TIcharger LN-3008 EQU Nr. Com. 9 2540
Pour les accus LiPo, LiLo et LiFe de 2 à 3S éléments et les accus NiMH et NiCd de 4 à 8 éléments
Outils :
Clé six pans SW 1,5 – 2 – 2,5 – 3 – 4 mm (se trouve dans le kit)
Pince coupante, tournevis cruciforme, tournevis plat (pour le réglage du gyroscope), pince pour rotules (conseillé).
Lors de la mise en place des composants électroniques, respectez les indications de la figure AS. Une description plus
détaillée de l’installation des servos se trouve dans la notice d’assemblage.
Lors de la mise en place du gyroscope, veillez à respecter la bonne position de montage. Pour cela, veillez prendre note des
indications de la notice jointe. Le montage du gyroscope doit se faire au travers d’absorbeurs de chocs et de rubans adhésifs
isolant double face. Fixez le récepteur , le régulateur et l’accu avec du velcro. Les câbles doivent être acheminés afin qu’ils ne
puissent toucher les pièces mobiles.
Lors de la mise en place de l’accu, vérifiez la position du centre de gravité (voir Fig. CG). Pour le vol stationnaire, le centre de
gravité doit se trouver directement sous le moyeu du rotor . Pour un vol rapide, positionnez l’accu plus en avant.
Le modèle est prévu pour être équipé d’un accu de propulsion LiPo 3S – 1 1,1V (courant continu d’au moins 35A). Utilisez de
préférence les types d’accus indiqués par nos soins. Pour cela le rapport prix/capacité est correct et sont bien adapté au
système. Si vous souhaitez changer de type d’accu, veillez à respecter obligatoirement la position du centre de gravité.
La tringle de commande du rotor, montée de série, a fait ses preuves. Pour un réglage encore plus précis vous trouverez dans le kit
une tringle ajustable.
La tringle de commande du rotor , montée de série, a fait ses preuves. Pour un réglage encore plus précis vous trouverez dans le kit une
tringle ajustable. Ainsi vous pouvez réajuster la trace (zone déplacement des pales de rotor sur un plan) afin d’éliminer ou de
minimiser les vibrations induites. Echangez la tringle du bras mélangeur 35 et la tête de rotule à clipser 55 contre la tringle ajustable
13 avec la tête de rotule à visser 14. Le montage se fait suivant les indications de la Fig. MR-05 & Fig. MR-06 des illustrations de la
notice. Lors de l’assemblage, évitez les contraintes par réglage exacte de la longueur de la tringle. La trace se laisse facilement régler
en dévissant la partie fixation d’un bout de la tringle et revissant, avec le même nombre de tours, la partie fixation de l’autre bout de
celle-ci. De cette manière le carcan du rotor se penche, ce qui a un effet sur la trace du rotor. Si vous constatez une dégradation du
phénomène il faut faire incliner le carcan dans l’autre sens en effectuant nouveau réglage.
14
Page 15
Servo
Accu
Gyroscpoe
Servo
Récepteur
Régulateur
Abb.AS
Abb. CG
15
Page 16
FunCopter
Données techniques :
Diamètre du rotor 708 mm
Longueur de l’ensemble 855 mm
Poids en vol env . 1250g
Consignes de sécurités
Les consignes de sécurités doivent êtres soigneusement
conservées avec la notice d’assemblage et d’utilisation et
transmise à tierce personne lors de la vente de ce produit. Si
vous deviez perdre la notice d’utilisation il est possible de la
téléchargée sur notre page Internet
Les modèles réduits hélicoptères ne sont pas adaptés
pour être utilisés par des personnes de moins de 16 ans.
Les enfants ne doivent utiliser ce genre de modèle que sous
la surveillance d’un adulte, doivent disposer de l’expérience
nécessaire et être conscient du danger potentiel.
Un modèle réduit hélicoptère n’est pas un jouet dans le sens
propre du terme. Les connaissances nécessaires pour
l’utilisation de ce genre de modèle doivent êtres acquises.
Pour cela il est possible d’avoir de l’aide dans les différents
clubs, auprès de pilotes expérimentés ou d’écoles de pilotage.
Un entraînement correctement orienté avec un simulateur de
vol est vivement conseillé. V ous pouvez par exemple obtenir
des adresses au travers du regroupement de la Fédération
Française d’AéroModélisme (FF AM) à Paris.
L’entretien et l’utilisation des modèles réduits hélicoptères
demandent une connaissance technique et un minimum de
dextérité ainsi que de la discipline et d’un bon sens de la
sécurité. Des erreurs ou des négligences au niveau de
l’entretien ou de l’utilisation peuvent avoir des dommages
corporels comme conséquences. Du fait que nous
constructeur n’avons aucune influence sur le sérieux de
l’entretien et de l’utilisation, nous vous rendons attentif à ces
risques. Tous les avertissements, y compris ceux contenu
dans la notice ci-dessous, doivent êtres strictement observés.
Le non respect de celles-ci peut entraîner de graves
blessures pouvant êtres mortelles.
Attention :
-Avant chaque utilisation, vérifiez la bonne fixation des pâles
de rotors et de toutes les pièces importantes – surtout avant
la première utilisation ou après le transport, après un
atterrissage un peu dur ou crash. De même, vérifiez le bon
fonctionnement de toutes les fonctions de votre
radiocommande ainsi que l’alimentation avant chaque vol.
- Ne mettez jamais la main dans les rotors en mouvements.
Cela pourrait entraîner de graves blessures corporelles. Il
est même possible que des membres soient coupés.
- Vous êtes seul responsable de toutes les conséquences
lors de l’utilisation de votre modèle et, de ce fait, il est
vivement conseillé d’être assuré (une assurance normale ne
suffit pas).
-Avant l’utilisation de votre modèle, informez les spectateurs
sur les dangers potentiels et demandez-leur de garder une
distance suffisante par rapport à votre modèle.
- Un modèle défectueux ne doit être utilisé qu’après avoir été
complètement réparé.
- Ne survolez ou visez jamais des personnes ou des animaux.
www.multiplex-rc.de.
- N’utilisez que des pièces d’origines pour la réparation de
votre modèle. La garantie n’est effective que dans cette
condition.
- N’utilisez jamais votre modèle sur les routes officielles, dans
les parcs, sur des places de jeux publics ou autres endroits
– pour des raisons d’assurances ne volez que sur des terrains
de modélismes. Pour toutes questions veillez contacter votre
revendeur – celui-ci pourra surement vous transmettre une
adresse.
Familiarisez-vous avec le modèle!
Les kits d’assemblages MUL TIPLEX sont soumis pendant la
production à des contrôles réguliers du matériel. Nous
espérons que le contenu du kit répond à vos espérances.
Nous vous prions de vérifier le contenu (suivant la liste des
pièces) du kit avant l’assemblage, car les pièces utilisées
ne sont pas échangées. Dans le cas où une pièce ne serait
pas conforme, réclamez auprès de votre revendeur , il est votre
interlocuteur direct. Après vérification, il nous fera parvenir
directement le kit ou la pièce en cause à notre service qualité.
Seules les réclamations avec coupon de caisse et petit
descriptif du défaut seront acceptées.
Nous essayons toujours de faire progresser
technologiquement nos modèles. Nous nous réservons le droit
de modifications de la forme, dimensions, technologie,
matériel et contenu sans préavis. De ce fait, nous ne prenons
donc pas en compte toutes réclamations au sujet des images
ou de données ne correspondants pas au contenu du manuel.
Comme chaque modèle, ce modèle a également des
limites statiques ! Une surcharge ou des manœuvres
insensées peuvent provoquer la perte du modèle. Veillez
noter que de ce cas nous ne faisons aucun échange. De
ce fait, approchez vous prudemment des limites de votre
modèle
Réglages mécaniques:
Le FunCopter est réglé idéalement pour les pilotes débutants.
Néanmoins, si vous souhaitez rendre votre modèle plus agil,
vous avez la possibilité de placer les tringles de commandes
dans les trous le plus à l’extérieur du palonnier (Attention! De
plus grandes forces agiront sur le servo! De ce fait, il y a un
risque plus élevé d’endommager le servo lors d’un contact plus
brutal avec le sol.), et les embouts en forme de Z (32) des
tringles de la tête de rotor complètement vers l’extérieur.
1. Utilisation
Vérifiez le contenu de la boite avant l’utilisation de votre
modèle.
Remarque : le modèle est pré assemblé en sortie d’usine,
néanmoins vous avez la responsabilité de l’assemblage
final et de son utilisation. De ce fait, vérifiez la plus petite
vis ainsi que tous les paramètres surtout les réglages des
servos et leur le sens de rotation.
2. Assemblage final
En dehors du contrôle des différentes fonctions il y a, en
fonction de la version, quelques opérations d’assemblage à
réaliser .
AK (Assembled Kit) = ici il suffit de mettre en place
l’équipement de radiocommunication.
Le modèle est vérifié avec tous les composants, ceux-ci sont
16
Page 17

adaptés en fonction. Si vous utilisez d’autres composants
vous portez également la responsabilité de vos actes.
RR (Ready for Radio) = ici il suffit de mettre en place
uniquement le récepteur. Fixez tous les câbles avec des
colliers Rilsan et veillez que ceux-ci n’entrent pas en contact
avec les pièces en mouvement que se soit des pignons ou
des tringles.
Chargez complètement l’accu avant chaque utilisation à l’aide
d’un chargeur adapté.
3. Contrôle des fonctions et réglages
Pour le pilotage de votre modèle vous nécessitez une
radiocommande possédant au moins 4 canaux, sans
mélangeur. Branchez le système en fonction des indications
du fabricant.
de queue repassera rapidement en position centrale lorsque
vous êtes en mode S tandard.
Enmode Headinglock le servo d’anti-couple va plutôt essay-
er de rester en position extrême. Ne vous laissez pas
déstabiliser par cela. Surveillez si la queue au repos ‘’drift’’,
contrôlez la valeur du trim de l’anti-couple (pour les systèmes
à base de microprocesseur : il ne doit pas y avoir de mélange
sur le signal d’anti-couple, utilisez pour votre FunCopter un
programme pour modèle à aile 4 canaux).
Lors de grandes différences de températures nous vous
conseillons, pour le récepteur comme pour le gyroscope,
d’attendre environ 5 minutes avant de voler . Ensuite éteignez
votre modèle puis rallumez-le. Maintenant votre FunCopter
est près à voler.
Pour des raisons de sécurités, démontez les pales du
rotor principal pour effectuer les premiers essais et tenez
votre modèle au niveau du support de l’accu ! Assurezvous que le moteur ne démarre pas lors de la mise en
marche !
Si vous souhaitez tester la fonction du rotor de queue
lorsque les pales du rotor principal sont démontées,
travaillez avec une faible vitesse de rotation du moteur .
Normalement le rotor principal freine le système. Si vous
n’avez pas monté les pales principales, le rotor de queue
entre dans une fenêtre de vitesse de rotation qui se
trouve bien au-dessus de la limite autorisée, il en résulte
que les contraintes sont donc bien trop élevées ! Les
conséquences peuvent êtres du type dommages sur le
modèle ou blessures !
Lorsque tous les trims de la radiocommande sont en position
‘’neutre’’, les palonniers des servos doivent également êtres
en position centrale et le plateau cyclique doit être à l’horizontal.
Si cela n’est pas le cas, ajustez la longueur des tringles en
conséquence.
Remarque pour l’entretien:
Il y a deux rondelles entre les pignons coniques (avant: 72, 73
/ arrière: 74, 75) et les douilles d’arrêts du rotor de queue. Il
est conseillé de lubrifier régulièrement ceux-ci avec une goute
d’huile silicone. De même il faut graisser régulièrement les
pignons d’entraînements. Pour cela, veillez à utiliser une
substance qui soit compatible avec les pièces plastiques.
Si vous déplacez ‘’Roll’’ vers la droite, le plateau cyclique doit
également pencher vers la droite. Inversement pour le côté
gauche.
Si vous commandez le rotor de queue (Gier) – manche vers la
droite – la tringle de commande devrait bouger vers l’arrière.
Inversement pour le côté gauche.
Réglez le débattement de l’anti-couple de telle manière afin
de pouvoir utiliser toute la course mécanique. Si la course
doit être réduite, nous vos conseillons d’effectuer le réglage
au travers de votre émetteur avec la fonction ‘’ Dual Rate’’ ou
limitation de course. Si vous n’avez pas cette possibilité il est
possible de déplacer la rotule sur le palonnier plus vers
l’intérieur.
Le gyroscope est utilisé en mode Headinglock (veillez lire
également la notice jointe !).
Si vous poussez le manche complètement d’un côté puis
relâchez à nouveau celui-ci, le servo de commande du rotor
Le sens des débattements est à programmer au travers du
commutateur REVERSE <-> :
Vérifiez le sens du débattement de votre gyroscope en tournant
votre modèle par à-coups autour de son axe vertical. Si le
gyroscope corrige dans le mauvais sens, la position du
commutateur REVERSE <-> est mauvaise, il faut la changer
par ex. à l’aide d’un tournevis. Le commutateur se trouve sur
le côté droit du boîtier .
Arrêtez obligatoirement le système RC avant d’intervenir sur
le commutateur !
Remarque
D’autres indications au sujet du plateau cyclique se trouvent
dans la notice jointe.
4. Contrôle final
a. le rotor de queue doit pouvoir bouger facilement.
b. remontez les pales du rotor principal. Celles-ci doivent
pouvoir se replier et se déplier sans pincements ou contraintes
et se clipser en position de travail.
c. les pièces de fixations doivent êtres assez rigides et serrés
de la même manière afin que le mouvement vers l’avant ou
vers l’arrière ne soit empêché uniquement par la pesanteur .
d. toutes les connexions électriques doivent avoir 100% de
contact. Les connecteurs doivent êtres complètement engagés
et les câbles tombant doivent êtres fixés par des colliers
rilsans.
e. la cabine doit être bien enclenchée.
f. vérifiez la position du centre de gravité. Pour cela, tenez
votre hélicoptère avec deux doigts au niveau du rotor principal.
Celui-ci doit trouver son équilibre de telle manière que le tube
de queue soit horizontal. En règle générale, les corrections
sont possibles en déplaçant la position de l’accu. Dans le
cas contraire – utilisez du ballast.
g. après 5 – 10 heures d’utilisation, contrôlez la rondelle 118
et changez celle-ci si vous constatez de l’usure.
5. Test de porté
Pour pouvoir effectuer le test de porté il faut démonter les
pales des rotors. S’il devait y avoir des perturbations lors du
test de porté qui font que le moteur se met en marche
intempestivement, le démontage permet donc de réduire le
danger de blessure corporel et les dégâts sur le modèle. Lors
du test, il est conseillé de poser le modèle sur la table. Si
vous posez le modèle sur le sol, cela aura une influence sur
le résultat du test.
En tous les cas, effectuez le test de porté avec le moteur à
l’arrêt et en marche. L’hélicoptère ne doit en aucun cas être
fixé au sol, cela peut provoquer des vibrations qui pourraient
17
Page 18

détruire complètement le modèle. Demandez à une tierce
personne de vous aider en restant vers le modèle et en
observant le modèle et de vous communiquer à partir de quel
moment les servos ont des mouvements ‘’incontrôlés’’ pendant
que vous vous éloignez avec la radiocommande. Effectuez le
test de porté proprement dit en suivant les indications du
constructeur de la radiocommande.
6. Premier vol
Il est conseillé d’effectuer le premier vol par une météo sans
vent. Veillez faire voler votre modèle sur les terrains de
modélismes officiels. Dans un premier temps pour des raisons
législatives et de plus, pour les pilotes débutants vous y trouver
souvent l’aide nécessaire. De plus, il est conseillé d’équiper
votre hélicoptère d’un système d’entraînement afin que celuici ne peu pas se renverser . Posez votre modèle environ 5m
devant vous, orienté contre le vent. De l’herbe courte ou un
terrain en dur est conseillé, les patins ne restent pas accrochés
et le rotor de queue peut tourner librement.
Après avoir contrôlé une dernière fois les différentes fonctions,
mettez doucement les ‘’gaz’’ jusqu’à ce que l’hélicoptère
semble ne plus rien peser et vérifiez délicatement les fonctions
ainsi que les trims.
Lors du premier essai, ne laissez pas monter l’hélicoptère
plus haut que 1 à 1,5m, mais ne ‘’glissez’’ pas non plus sur le
sol. Ne vous éloignez pas plus de 10-20m de votre position.
Pour des raisons de sécurités, il est conseillé également de
ne pas laisser le modèle s’approcher à plus de 5m de vous.
Si vous rencontrez une situation critique, atterrissez votre
modèle. N’actionnez pas la commande des ‘’gaz’’ d’une
manière incertaine et en aucun cas nerveusement. Lorsqu’un
crash ou un atterrissage un peu dur n’est plus à éviter , réduisez
complètement la puissance du moteur . Dans ce cas, en règle
générale, le modèle ‘’survie’’ au crash avec le moins de dégâts.
7. Premier vol autour de vous
Lorsque vous considérez maîtriser suffisamment le vol
stationnaire, changez votre position. Placez-vous à côté de
votre hélicoptère. A environ 5m de dist ance, entraînez vous à
nouveau au vol stationnaire dans cette position. Maintenant
essayé de vous déplacer doucement en avant en restant
toujours dans la même position. Gardez la distance et la
hauteur puis tournez vous avec votre hélicoptère effectuant
un mouvement en avant. Si le premier cercle n’est pas réussi,
cela n’est aucun problème. Atterrissez votre hélicoptère et
réessayez la manœuvre. Il est à observer que, lors de vols
avec une pente négative, votre FunCopter a tendance à se
cabrer. Ne soyez p as surpris et poussez un peu le manche.
Si votre modèle devait trop se cabrer, réduisez la vitesse de
descente.
Lors des vols descendants, veillez à ne jamais complètement
arrêter le moteur. Si une vitesse minimale de rotation est
dépassée, il est possible que les pales se tordent vers le
haut par la résistance de l’air ce qui ne peut plus être corrigé.
8. Vol en forme de huit
La prochaine étape est le vol ‘’vers vous’’.Afin de simplifier la
chose, effectuez devant vous des vols en forme de huit toujours
contre le vent. Vous allez remarquer que cela est bien plus
difficile que de tourner autour de vous. V olez tout d’abord vers
la droite/gauche puis veillez à garder la même altitude, plus
vous maîtrisez et plus grand peuvent devenir les cercles du
huit.
9. Atterrissages et atterrissages d’urgences
Atterrir après un vol stationnaire est le plus simple. Réduisez
simplement délicatement les gaz et attendez la réaction de
votre modèle – si votre hélicoptère descend trop rapidement il
faut remettre un peu de gaz pour le rattraper. Toutes les
manipulations doivent êtres effectuées sans brutalité.
Lorsque votre modèle se déplace en avant, réduisez
doucement les gaz et freiner le en donnant un peu de Nick
(vers l’arrière) afin que celui-ci passe en vol stationnaire,
remettez doucement les gaz – maintenant vous pouvez l’atterrir
de cette position stationnaire.
Si la situation devrait vraiment devenir critique et qu’un crashou
un atterrissage brutal n’est plus à éviter, il est préférable de
réduire complètement la puissance du moteur. De cette
manière votre modèle a la meilleure chance de survivre lorsque
le rotor touche un obstacle.
10. Vibrations
Le FunCopter est un hélicoptère contrôlé au travers de la
vitesse de rotation du rotor, de ce fait, celui-ci adapte sa
vitesse dans une certaine plage en fonction des situations de
vol. Lors de la descente, la vitesse de rotation peut être
tellement faible que le modèle passe dans une zone de
résonance et commence à vibrer. Pas de panique !Augmentez
la vitesse de rotation afin que votre FunCopter se ‘’calme’’,
cela sera rapidement le cas.
Lorsque vous mettez en marche les rotors, il est normal que
l’hélicoptère soit secoué brièvement, c’est l’effet de résonance
de sol qui est stoppé lorsque la vitesse de rotation est
rapidement augmentée.
Si vous remarquez des vibrations après un crash ou un
problème de transport alors il y a un problème. Contrôlez si
l’axe du rotor principal ou de l’anti-couple n’est pas tordu en
démontant ceux-ci et en les faisant rouler sur une surface
plane. Si vous constatez des déformations même minimes,
changez la pièce.
En effet, il est encore possible de voler avec votre modèle
lorsque celui-ci vibre, mais les composants électroniques sont
fragilisés et peuvent êtres endommagés d’une manière permanente. Si le modèle vibre alors qu’il n’y a pas eu de crash,
il pourrait être nécessaire de rééquilibrer les pales. Pour cela
collez autant de ruban adhésif sur la zone de centre de gravitée
de la pale (au bout extérieur de la tubulure biseautée – partie
plastique – sur le dessus de la pale) jusqu’à ce que les pales
ont un poids identique au dixième de gramme.
11. Sécurité
Sécurité est un maître mot dans le monde de l’aéromodélisme.
Une assurance est obligatoire. Dans le cas où vous êtes
membre au sein d’un club, vous pouvez y souscrire une
assurance qui vous couvre suffisamment.
Veillez à toujours être bien assuré (pour des modèles réduit s
avec moteur).
Entretenez toujours correctement vos modèles et vos
radiocommandes. Informez-vous sur la procédure de recharge
de vos accus. Mettre en œuvre toutes les dispositions de
sécurités nécessaires. Informez-vous sur les nouveautés que
vous trouverez dans notre catalogue général MUL TIPLEX. Les
produits ont été testés par de nombreux pilotes chevronnés
et sont constamment améliorés pour eux.
Volez d’une manière responsable! V oler juste au-dessus des
têtes n’est pas un signe de savoir-faire, le vrai pilote n’a pas
besoin de démontrer son habilité. T enez ce langage à d’autres
pseudo pilotes, dans l’intérêt de tous. Piloter toujours de telle
manière à éviter tous risques pour vous et les spectateurs, et
dites-vous bien que même avec la meilleure radiocommande
18
Page 19
n’empêche pas les perturbations et les bêtises. De même
une longue carrière de pilote sans incidents n’est pas une
garantie pour les prochaines minutes de vol
12. Transport
Pour le transport de votre FunCopter vous trouverez un
système de fixation de pales dans le kit. Placez les pales du
rotor vers l’arrière et passez chacune dans les deux fentes
puis engagez l’évidement de la pièce de fixation sur le tube
de queue. De cette manière vous pouvez transporter facilement
et d’une manière sécurisée votre FunCopter.
Nous, le Team MULTIPLEX, vous souhaitons beaucoup de
plaisir et de succès pendant la construction et le pilotage.
MUL TIPLEX Modellsport GmbH & Co.*Kg
Support technique et Développement
Klaus Michler
Remarque concernant la réparation
Le modèle est vraiment très robuste – mais il peut toujours
arriver quelque chose. De ce fait nous avons divisé l’hélicoptère
en 5 groupes.
1. chassie et patin d’atterrissage
2. rotor principal
3. rotor de queue
4. tube de queue
5. fuselage
Avec la représentation graphique il devrait toujours être de
démonter et de remonter le groupe de pièces correspondant.
Les pièces de rechanges suivantes sont proposées :
Pièces de rechanges
Pales de rotor de queue (1 paire) #22 3001
Axe de rotor principal #22 3002
Support de pales 5° #22 3003
Kit de roues dentées #22 3004
Kit de tringles #22 3005
Kit de tringle de commande pour tête de rotor #22 3006
Kit de pièces pour plateau cyclique #22 3007
Kit de balancier pour Nick #22 3008
Kit de palonniers de servos #22 3009
Kit tête de rotor #22 3010
Kit pour le rotor auxiliaire #22 3011
Pignon d’entraînement anti-couple #22 3012
Kit tube de queue #22 3013
Kit tringle de commande anti-couple #22 3014
Kit de corps de rotor d’anti-couple #22 3015
Kit chassie #22 3016
Support de patin d’atterrissage (1 paire) #22 3017
Kit patin d’atterrissage #22 3018
Planche de décoration #22 3019
Habillage de fuselage avant + stab. horizontal #22 3020
Habillage de fuselage arrière + stab. vertical #22 3021
Pales de rotor principal (1 paire) #22 3022
Tringle d´ajustage (1 paire) #22 3023
Fixation de pales de rotor #22 3024
Rondelle Ø7xØ2x0,3mm (10 pcs) #22 3025
Pièce centrale seule #22 3026
Boîtier de rotor de queue avec pièce en EPP #22 3027
Moteur Brushless (Himax C 6310-0225) #22 3070
Astuces pour le réglage de l’émetteur:
Si vous utilisez un émetteur programmable, nous vous conseillons d’effectuer les réglages suivants:
Pour le modèle FunCopter vous pouvez utiliser une mémoire du type modèle à aile afin d’éviter de devoir vous battre avec des
mélangeurs agissant sur la queue de l’appareil, ce que vous ne souhaitez pas. Un programme spécifique hélicoptère n’est pas
absolument nécessaire.
Pour la fonction „Nick“ („profondeur“) et „Roll“ („aileron“) vous pouvez, si vous le souhaiter, mélanger celles-ci avec les fonctions
Expo ou Dual Rate ou encore limiteur de course afin de pouvoir déterminer la sensibilité de réaction de votre FunCopter. Pour
le réglage de l’anti-couple il est conseillé de travailler avec la fonction Dual-Rate ou limiteur de course afin d’adapter les
mouvements de celui-ci à vos besoins.
Il s’est avéré d’un confort supplémentaire la programmation de deux phases de vol: la première phase de vol pour le stationnaire
dans laquelle vous trimmez votre FunCopter de telle manière à ce qu’il reste sur place. La deuxième phase de vol devra être
mémorisée avec le trim de la fonction „Nick“ un peu en avant. De ce fait, votre modèle se placera toujours en vol vers l’avant, ce
qui rend le vol circulaire plus confortable.
Nous vous conseillons d’utiliser les valeurs suivantes sur votre équipement MULTIPLEX:
Fonction Phase de vol „Stationnaire“ Phase de vol „Circulaire“
Nick (profondeur) Expo: 30 %, Course: 70 % Course: 100 %, Trim env. 5% en avant
/ bas
Ro ll (aileron) Expo: 30 %, Course: 70 % Course: 100 %
Anti-couple (direction) Course: 60 % Course: 60 %
19
Page 20

Liste des pièces FunCopter
AK RR
Nr. Nbr Nbr Désignation Matière Dimensions Contenu du sachet de pcs de rechange
1 1 1 Notice d’assemblage du modèle Papier
2 1 1 Notice d’utilisation du moteur Papier
3 0 1 Notice d’utilisation du régulateur Papier
4 0 1 Notice d’utilisation du gyroscope Papier
Outils et articulation réglable
8 1 1 Clé six pans Métal SW 1,5mm
9 1 1 Clé six pans Métal SW 2mm
10 1 1 Clé six pans Métal SW 2,5mm
11 1 1 Clé six pans Métal SW 3mm
12 1 1 Clé six pans Métal SW 4mm
13 2 2 tringle ajustable Métal M2x12 Ø1,8x12x42,5mm #223023 (2x)
14 2 2 Clé six pans Plastique Complet #223023 (2x)
Kit de petites pièces AK
15 3 0 Bande Velcro côté crochets Plastique 25x60mm #683112 (5x)
16 3 0 Bande Velcro côté velours Plastique 25x60mm #683112 (5x)
17 4 0 Collier Rilsan Plastique 98x2,5mm
18 6 0 Vis de fixation de servo Métal 2,2x13mm #682651 (50x)
Petites pièces (assemblées)
20 3 3 Bande Velcro côté crochets Métal Pièces tournées #223009 (1x)
21 2 2 support de fixations Métal Pièces extrudées 1,5mm #223016 (2x)
22 8 8 Collier Rilsan Plastique 142x2,5mm #223017 (4x)
23 2 2 Insert pour pignon Métal SW5,9xØ1,9x10,5mm #223004 (2x)
24 1 1 Cylindre de blocage Métal Ø8xØ3,2x5mm #223014 (1x)
25 1 1 Pièce hexagonale Métal SW1 1,9xØ4,05x16mm #223004 (1x)
26 3 3 Cylindre de guidage Métal Ø11xØ4,95xØ4,05x9,1mm #223002 (1x)
27 1 1 Douille support de tringle Métal Ø6xØ3xØ1,9x10mm #223014(1x)
1 1 Axe de rotor de queue Métal Ø4xSW4x Ø1,9x51mm #223012 (1x)
28
29 1 1 Tube de queue Métal SW12x0,4x450mm #223013 (1x)
30 2 2 Tige de support de patin Acier type ressort Ø1,8x160x49mm #223018 (2x)
31 2 2 Axe de rotor principal Acier trempé Ø4x200mm #223002 (1x)
32 2 2 Tringle en Z pour rotor principal Acier type ressort Ø1,8x16x19mm #223005 (2x)
33 2 2 Tringle pour l’anti-couple Acier type ressort Ø1,8x537mm #223013 (1x)
34 2 2 axe du rotor de queue Acier type ressort Ø1,5x478mm #223013 (1x)
35 2 2 Bras mélangeurs Acier type ressort Ø1,8x45x14mm #223005 (2x)
36 2 2 Tringle de commande Nick Acier type ressort Ø1,8x75mm #223005 (1x)
37 2 2 Commande du rotor de queue Acier type ressort Ø1,8x83x17mm #223005 (1x)
38 1 1 Tringle de commande Roll Acier type ressort Ø1,8x90mm #223005 (1x)
39 1 1 Tringle de dérive Acier type ressort Ø1,8mm #223015 (1x)
40 1 1 Barre de stabilisateur Acier type ressort Ø1,8x215mm #223011 (1x)
#223018 (8x)
#223014 (2x)
#223012 (1x)
#223014 (1x)
#223027 (1x)
Habillage de fuselage + planche de décoration (montée)
41L 1 1 Fuselage avant gauche Mousse formée Complet #223020 (1x)
41R 1 1 Fuselage avant droite Mousse formée Complet #223020 (1x)
42L 1 1 Fuselage arrière gauche Mousse formée Complet #223021 (1x)
42R 1 1 Fuselage arrière droite Mousse formée Complet #223021 (1x)
43L 1 1 Guide de fuselage gauche Mousse formée Complet #223021 (1x)
43R 1 1 Guide de fuselage droite Mousse formée Complet #223021 (1x)
44L 1 1 Stabilisateur vertical gauche Mousse formée Complet #223021 (1x)
44R 1 1 Stabilisateur vertical droite Mousse formée Complet #223021 (1x)
45L 1 1 Stabilisateur horizontal gauche Mousse formée Complet
45R 1 1 Stabilisateur horizontal droite Mousse formée Complet #223021 (1x)
46 1 1 Fixation de pale Mousse formée Complet #223024 (1x)
49 1 1 Planche de décoration Film autocollant imprimé Complet #223019 (1x)
Pièces injectées en plastique (montées)
50 2 2 Pales de rotor principal Plastique injecté Complet #223022 (2x)
51 1 1 Rotor auxiliaire Plastique injecté Complet #223011 (1x)
52 1 1 Balancier Plastique injecté Complet #223011 (1x)
53 1 1 Plateau cyclique supérieur Plastique injecté Complet #223007 (1x)
54 1 1 Plateau cyclique inférieur Plastique injecté Complet #223007 (1x)
55 4 4 Tête de rotule Plastique injecté Complet #223005 (4x)
56 1 1 Tringle de commande Plastique injecté Complet #223006 (1x)
57 1 1 Moyeu de rotor Plastique injecté Complet #223010 (1x)
59 2 2 Bras mélangeur Plastique injecté Complet #223006 (2x)
60 1 1 Levier de commande Plastique injecté Complet #223006 (1x)
#223021 (1x)
#223027 (1x)
#223027 (1x)
#223026 (1x)
#223010 (1x)
20
Page 21

61 1 1 Axe de commande Plastique injecté Complet #223006 (1x)
AK RR
Nr. Nbr Nbr Désignation Matière Dimensions Contenu du sachet de pcs de rechange
62 1 1 Carcan de rotor Plastique injecté Complet #223010 (1x)
63 1 1 Patin d’atterrissage gauche Plastique injecté Complet #223018 (1x)
64 1 1 Patin d’atterrissage droite Plastique injecté Complet #223018 (1x)
65 1 1 Support d’anti-couple arrière Plastique injecté Complet #223013 (1x)
66 1 1 Support d’anti-couple avant Plastique injecté Complet #223013 (1x)
67 2 2 Douille de guidage centrale Plastique injecté Complet #223013 (2x)
68 2 2 Embout de tube de queue Plastique injecté Complet #223013 (2x)
69 1 1 Partie gauche du balancier Plastique injecté Complet #223008 (1x)
70 1 1 Partie droite du balancier Plastique injecté Complet #223008 (1x)
71 1 1 Fixation du tube de queue Plastique injecté Complet #223016 (1x)
72 1 1 Pignon principal Plastique injecté Complet #223004 (1x)
73 1 1 Pignon d’entraînement avant Plastique injecté Complet #223004 (1x)
74 1 1 Pignon d’entraînement arrière Plastique injecté Complet #223004 (1x)
75 1 1 Pignon d’entraînement anti-couple Plastique injecté Complet #223004 (1x)
76 3 3 Palonnier twin Plastique injecté Complet #223009 (1x)
77 2 2 Levier de fixation Nick Plastique injecté Complet #223008 (2x)
78 2 2 Support de patin Plastique injecté Complet #223017 (2x)
79 1 1 Chassie Plastique injecté Complet #223016 (1x)
80 2 2 Pales de rotor de queue Plastique injecté Complet #223001 (2x)
81 1 1 Corps de rotor de queue Plastique injecté Complet #223015 (1x)
82 1 1 Levier de transmission Plastique injecté Complet #223014 (1x)
83 1 1 Commande de rotor de queue Plastique injecté Complet #223014 (1x)
84 1 1 Pièce centrale de pales anti-couple Plastique injecté Complet #223014 (1x)
85 1 1 Tête de roulement Plastique injecté Complet #223016 (1x)
86 1 1 Rondelle gauche arrière Plastique injecté
87 1 1 Rondelle droite arrière Plastique injecté Complet #223020 (1x)
88 1 1 Rondelle gauche avant Plastique injecté Complet #223020 (1x)
89 1 1 Rondelle droite avant Plastique injecté Complet #223020 (1x)
90 1 1 Crochet de fixation cabine Plastique injecté Complet #223020 (1x)
91 2 2 Support de pales Plastique injecté Complet #223003 (2x)
Pièces normées (montées)
95 8 8 Vis cylindrique six pans Métal M2x6mm #223007 (6x)
96 4 4 Vis cylindrique six pans Métal M2x10mm #223006 (2x)
97 5 5 Vis cylindrique six pans Métal M2,5x12mm #223016 (1x)
98 4 4 Vis cylindrique six pans Métal M2,5x16mm #223016 (4x)
99 3 3 Vis cylindrique six pans Métal M3x12mm #223010 (1x)
100 2 2 Vis cylindrique six pans Métal M3x20mm #223003 (2x)
101 2 2 Vis cylindrique six pans Métal M4x8mm #223016 (2x)
102 2 2 Vis cylindrique six pans Métal M5x35mm #223011 (2x)
103 2 2 Vis à tête fraisée Métal M2,5x25mm #223008 (2x)
104 3 3 Rondelle Métal Ø2,2mm(M2) #223006 (2x)
105 1 1 Rondelle Métal Ø3,2mm(M3) #223010 (1x)
106 2 2 Rondelle Métal Ø3,2mm(M3) #223001 (2x)
107 10 10 Tige filetée Métal M3x3mm #223002 (2x)
108 2 2 Tige filetée Métal M4x6mm #223004 (2x)
109 6 6 Tige filetée Métal M3x16mm #223001 (2x)
110 4 4 Tige filetée Métal M4x4mm #223022 (2x)
111 4 4 Téton cylindrique durci Métal Ø1,5m6x20mm #223001 (2x)
112 1 1 Téton cylindrique durci Métal Ø2m6x16mm #223006 (1x)
113 1 1 Téton cylindrique durci Métal Ø3m6x28mm #223010 (1x)
114 3 3 Ecrou Nilstop Métal M3 #223010 (1x)
115 1 1 Roulement à billes faible épaisseur Métal Ø21xØ15x4mm #223007 (1x)
116 1 1 Roulement à billes Métal Ø13xØ7x4mm #223015 (1x)
117 3 3 Roulement à billes Métal Ø11xØ5x4mm #223015 (1x)
118 2 2 Rondelle Plastique Ø7xØ2x0,3mm #223004 (2x)
119 4 4 Ecrou Nilstop Métal M2,5 #223016 (4x)
Composants RC (montées)
120 1 1 Moteur Brushless Himax C 6310-0225 Complet #333070 (1x)
121 0 3 Servo sans palonnier / avec vis Tiny-S Complet #65121 (1x)
122 0 1 Régulateur MULTIcont BL-37/II Complet #72276 (1x)
123 0 1 Gyroscope + 2 pads d’assemblage MULTIgyro 300DP Complet #75503 (1x)
15 0 3 Bande Velcro côté crochets Plastique 25x60mm #683112 (5x)
16 0 3 Bande Velcro côté velours Plastique 25x60mm #683112 (5x)
17 0 4 Collier Rilsan Plastique 98x2,5mm
18 0 6 Vis de fixation de servo Métal 2,2x13mm #682651 (50x)
Complet #223020 (1x)
#223027 (1x)
#223015 (1x)
#223016 (1x)
#223014 (1x)
#223015 (1x)
#223016 (2x)
#223014 (1x)
#223009 (1x)
#223014 (3x)
#223010 (2x)
#223016 (2x)
#223025 (10x)
21
Page 22

Remarque importante
Le fuselage du modèle est en EPP ! De ce fait l’utilisation de
colle blanche, polyuréthane ou époxy n’est pas possible.
Pour le collage des différents matériaux nous vous conseillons
d’utiliser de la colle à chaud.
1. Avant l’assemblage
Vérifiez le contenu de la boite avant de débuter les travaux.
Pour cela, vous pouvez vous aider de l’image Fig.1+2 et de la
liste des pièces.
Lors de l’assemblage du FunCopter il y a quelques rotules à
monter. Assurez-vous que les articulations ont un peu de
résistances au mouvement, sinon vous pouvez y remédier en
écrasant délicatement la tête de rotule avec une pince.
2. Assemblage de la mécanique
2.1. Assemblage du patin d’atterrissage
Fig. CH-01
Engagez les tiges de fixation 30 dans les deux patins
d’atterrissages63 et 64 puis amenez l’ensemble dans la bonne
position.
Avec les quatre colliers Rilsan 22 fixez maintenant les bouts
des tiges de fixations à la partie de réception des patins.
Fig. CH-02
2.2. Mise en place des servos
La prochaine étape est le montage des trois servos (Tiny-S,#6
5121, alternative Tiny-MG,#6 5122). Placez les servos dans le
chassie79. V eillez à ce que le servo d’anti-couple (à gauche)
et le servo Roll (à droite, derrière) soient montés que la
couronne dentée se situe en haut. Pour le servo Nick (à droite,
devant) la couronne dentée doit être en bas. Les servos sont
respectivement fixés avec deux vis 2,2x13mm 18sur le chassie.
Fig. CH-03
Vissez maintenant le support de fixations 21 sur le côté gauche
du chassie 79. Vissez également, en utilisant du frein filet, la
vis M4x8mm 101.
Fig. CH-09
2.5. Montage des patins d’atterrissages
Engagez les tiges des patins d’atterrissages dans les supports.
Fig. CH-10
Fixez également les tringles des patins d’atterrissages avec
quatre colliers Rilsan 142x2,5mm 22 sur le support
Fig. CH-11
2.6. Montage des têtes de rotules
Placez le roulement à bille Ø11x Ø5x4mm 117 dans la tête de
rotule85.
Fig. CH-12
Avec les deux vis M3x12mm 99 vissez par la gauche la tête
de rotule sur le dôme du chassie 79.
Fig. CH-13
2.7. Montage du balancier pour la fonction Nick
Engagez les deux leviers 77 pour la fonction Nick sur la partie
gauche du balancier 69 pour la fonction Nick. Pressez le
balancier pour la fonction Nick par la gauche sur les tétons de
l’axe. Les pièces pour le balancier Nick seront maintenues à
l’aide des deux vis M2,5x25mm 103. Attention, veillez à ce
que les mouvements se fassent librement.
Fig. CH-14
2.8. Montage de tringles de commandes
Engagez les tringles de commandes pour la fonction Nick 36
et Roll 38 sur les têtes de rotules 55. Fig. CH-15
Assurez-vous que les servos soient bien en position centrale.
Maintenant vous pouvez placer les trois palonniers twin 76.
Pour le servo d’anti-couple, la rotule de fixation est fixée dans
le trou le plus près de l’axe du palonnier , pour les autres servos
celui-ci se place dans le trou le plus à l’extérieur. Dans chaque
système la rotule de fixation il faut visser – dans un premier
temps sans serrer – une vis six pans creux 107 M3x3mm.
Maintenant vous pouvez placer le palonnier pré monté sur la
couronne dentée du servo respectivement puis fixez l’ensemble
avec la vis pour servo 2,3x5mm. Pour la mise en place, le
palonnier pour le rotor de queue doit pointer vers le haut et 10°
et vers l’avant (voir le chapitre d’assemblage 6.4), les palonniers
pour les servos Nick et Roll sont à l’horizontal, montrant vers
l’arrière.
Fig. CH-04& -05
2.3. Montage du support des patins d’atterrissages
Les deux supports de fixation 78sont vissez sur le chassie 79
avec respectivement deux vis M2,5x12mm 97
Fig. CH-06
2.4. Montage du moteur
Posez maintenant le moteur 120 devant vous, les câbles
d’alimentations sortants (vers le haut) regardant vers la gauche
dans votre direction (par exemple en position 7&8 heure). Vue
de dessus, vissez maintenant le premier des deux supports
de fixation 21 sur le taraudage de droite à l’aide des vis
M4x8 101. Pour l’instant ne serrez pas celle-ci.
Fig. CH-07
Engagez le moteur avec les supports de fixations de la droite
sur le chassie 79 puis serrez la vis tout en utilisant du frein
filet. Pendant ce temps orientez correctement le moteur afin
que le taraudage soit appuyé en regard avec le trou réalisé de
l’autre côté du chassie.
Fig. CH-08
2.9. Montage du plateau cyclique
Engagez le roulement très fin Ø21xØ15x4mm 115 dans le
plateau cyclique supérieur 53 puis vissez les trois vis M2x6mm
95 pour la fixation de celui-ci. Ajoutez quelques goutes d’huile
dans le roulement fin.
Fig. CH-16
Engagez maintenant le plateau cyclique inférieur 54 dans le
plateau cyclique supérieur.A l’aide des trois vis M2x6mm 95
les deux parties du plateau cyclique, fixez les deux parties
ensembles. Veillez à ce que l’ensemble bouge facilement.
Fig. CH-17
Placez maintenant le plateau cyclique assemblé sur la rotule
de la tête de l’axe puis engagez les tringles de commande
pour le fonction Nick 77 sur les têtes de rotules sur l’extérieur
du plateau cyclique.
Fig. CH-18
2.10. Montage des tringles
Engagez maintenant la tringle de commandes pour la fonction
Nick36 sur la rotule de commande du balancier Nick. La tringle
de commande pour la fonction Roll 38 s’engage sur la rotule
dépassant un peu à droite en dessous du plateau cyclique.
Passez maintenant dans les rotules de fixation sur les
palonniers correspondants. Orientez le plateau cyclique à
l’horizontal et veillez que les palonniers soient en position
centrale. Si cela est respecté vous pouvez serrer la vis de
fixation de la rotule des palonniers de chaque fonction. Utilisez
du frein filet pour garantir le serrage.
Fig. CH-19
2.11. Mise en place de l’électronique
Comme indiqué sur l’illustration, montez sur le côté gauche
du chassie le régulateur, gyroscope et le récepteur. Pour la
fixation utilisez du ruban adhésif double face isolant, cela
22
Page 23

permet également d’absorber les vibrations et protègera les
composants électroniques.
Lors de la mise en place du gyroscope veillez à le positionner
correctement. Pour cela suivez les indications dans la notice
de celui-ci.
Pour le placement des câbles, vous trouverez quatre colliers
rilsan 17 dans le kit.
Fig. CH-20
3. Assemblage du rotor principal
3.1. Assemblage de la tête de rotor
La tringle de commande 56 se clipse sur le levier de commande
60. Engagez la partie commande 61 sur la partie de réception
arrière du levier de commande puis liez les deux pièces avec
l’axe cylindrique Ø1,5m6x20mm 111. Assurez la position de
l’axe avec une goûte de colle rapide d’un côté. Veillez à ce
que la colle ne coule le long de l’axe. Ensuite engagez le
moyeu de rotor 57 dans le levier de commande. Liez les deux
pièces avec deux axes cylindriques Ø1,5m6x20mm 111.
Assurez à nouveau la position de l’axe avec une goûte de
colle rapide.
Fig. MR-01
pas complètement une des deux vis afin de pouvoir mettre en
place la barre de stabilisation dans une des étapes suivantes
Fig. MR-07
Le rotor auxiliaire est placé sur le balancier et la barre de
stabilisation40 est passée dans le trou réalisé à cet effet afin
de pouvoir réaliser la connexion avec la tête de rotor . Utilisez
un fil très fin ou équivalent pour pouvoir passer la barre de
stabilisation jusqu’au bout. Ensuite mettez en place la vis que
vous aviez laissée libre. Reliez la tringle de commande 56
avec le rotor auxiliaire.
Fig. MR-08
3.4. Mise en place de l’axe du rotor principal
Fig. MR-09& -10
L’axe de rotor princip al31 s’engage par en-dessous dans le
moyeu de rotor 57. Pour cela, l’encoche, qui sert d’arrêt en
niveau du moyeu, doit montrer vers le haut. Regardez dans le
trou du moyeu et positionnez l’axe de telle manière que la vis
M3x12mm 99 soit guidée sans rencontrer d’obstacles. Entre
la tête de vis et le moyeu du rotor il faut placer une rondelle
Ø6xØ3,2x0,3mm 105. Serrez la vis avec l’écrou Nilstop M3
114.
Ensuite il faut mettre en place le carcan 62. D’un côté cette
pièce possède un évidement et de l’autre côté il y a deux
petites poches. Engagez la pièce sur le moyeu de rotor 57 de
telle manière que la tringle de commande 56 passe par
l’évidement et que les deux poches soient en bas. Fixez le
carcan du rotor avec l’axe cylindrique Ø3x28mm 113. Passez
l’axe cylindrique de telle manière à ce qu’il soit jointif avec
l’ouverture de la tringle de commande. L ’axe ne devrait en aucun
cas le surplomber.
Fig. MR-02
Le balancier 52 se positionne entre les deux chevalets du
moyeu de rotor et est fixé avec deux axes cylindriques
Ø2m6x16mm112.Assurez la position de l’axe avec une goûte
de colle rapide et veillez à ce que les mouvements se fassent
facilement.
Fig. MR-03
Les supports de pales 91 doit être mis en place de telle manière
que la partie pointue, qui marque l’inclinaison (5°) soit visible
du dessus. Afin de fixer le support de pale, utilisez les deux
vis cylindriques M3x20mm 100.
Fig. MR-04
3.2. Tringles de commandes et mélangeur
Engagez les tringles de mélanges 35 dans les ouvertures des
la tête de rotule 55
Fig. MR-05
4. Assemblage du rotor de queue
4.1. Axe du rotor de queue
Fig. TR-01
En respectant les dimensions indiqués, engages le pignon
d’entraînement du rotor de queue 75 sur l’axe du rotor de queue
28.
4.2. Assemblage du corps du rotor de queue
Fig. TR-02& TR-03
Ensuite mettez le roulement à billes Ø1 1xØ5x4mm117 dans
l’évidement du côté droit du corps de rotor de queue 81.
Engagez l’axe de rotor muni du pignon par le côté gauche
dans l’ouverture et dans le roulement déjà en place puis placezy le roulement à billes Ø13xØ7x4mm 116.
4.3. Montage du rotor de queue
Fig. TR-04, -05 & -06
Entre les deux parties préformées du support de pales 80
placez la partie centrale de pale 84 avec les deux rondelles
Ø6xØ3x0,3mm 106. Veillez à ce que les pales du rotor de
queue soient montées dans le bon sens. En regardant de la
gauche, le rotor de queue tourne dans le sens des aiguilles
d’une montre.
Ensuite, mettez en place la pièce de commande 83 du rotor
de queue. Les bouts de cette pièce seront fixés sur les supports
de pales et maintenus avec des goupilles Ø1,5x20mm 111
Fixez les deux tringles 59 au balancier 96 à l’aide des deux
vis M2x10mm 96. Pour cela il faut que la partie plate des bras
mélangeurs regardent vers le balancier. Avant de visser
complètement les deux vis M2, il faut passer les tringles pour
le rotor principal avec embout en Z 32 dans les perçages
extérieurs et les tringles pour les bras mélangeurs 35 dans
les perçages intérieurs. Les tringles avec embouts en Z sont
engagez dans les trous extérieurs de l’autre côté du carcan
du rotor. Entre la tête de vis et le bras mélangeur il faut placer
respectivement une rondelle Ø5xØ2x0,3mm 104
Placez maintenant la pièce déportée de la tringle du bras
mélangeur dans le trou extérieur des bras mélangeurs.
Fig. MR-06
3.3. Rotor auxiliaire
Les deux vis à tête cylindrique M5x35mm 102 servent de
masselottes et ont vissées sur le rotor auxiliaire 51. Ne vissez
Fig. TR-07
Placez maintenant le rotor de queue pré assemblé sur l’axe
d’entraînement de telle manière à ce que le pièce principale
du rotor de queue soit bloquée dans le roulement 116. Les
goupilles 109 sont maintenant tellement serrées que le rotor
de queue soit fixé et sécurisé sur l’axe
4.4. Fixation du rotor de queue
Fig. TR-08
Mettez en place par la droite le palier cylindrique de blocage
26 sur l’axe du rotor de queue. Il ne doit pas y avoir de jeu
axial. Si vous avez réalisé cette condition, fixez le palier
cylindrique à l’aide des deux vis six pans de blocage M3x4mm
107et utilisez du frein filet pour sécuriser l’ensemble
4.5. Assemblage de la commande du rotor de queue
Fig. TR-09
23
Page 24

Mettez tout d’abord la douille de support de la tringle 27 en
place en partant de l’intérieur et engagez-la dans le trou central
la douille de commande jusqu’en butée. De l’autre côté,
engagez le cylindre de blocage 24 pour la douille et fixez le à
l’aide de la vis à six pans creux M3x3mm 107, La goupille est
à sécurisé avec une goute de frein filet. Assurez-vous que l’axe
de commande tourne facilement dans la douille de guidage.
Engagez maintenant la tringle de commande du rotor de queue
37de la droite au niveau de l’axe du rotor de queue. Enduisez
la tringle avec un peu de graisse afin que le système coulisse
facilement.
4.6. Mise en place du levier de transmission du rotor de
queue
Fig. TR-10
A l’aide de la vis M2x10mm 96 et de la rondelle correspondante
Ø5xØ2,2x0,3mm 104 fixez le levier de transmission 82.
Engagez la partie tordue de la tringle de commande dans le
trou de la partie la plus courte du levier . Ici aussi, veillez à ce
que le levier bouge facilement avec le moins de jeu possible.
4.7. Protection de rotor de queue
Fig. TR-11
Engagez le fil d’acier de la dérive 39 dans les trous de
réceptions du corps du rotor de queue 81 et fixez-le avec un
peu de colle rapide.
4.8. Contrôle de l’assemblage
Fig. TR-12
Maintenant que la partie mécanique de la queue de votre
modèle est assemblée, contrôlez si les différentes pièces
soient correctement mises en place en fonction des
illustrations.Assurez-vous que les pièces soient placées avec
l’angle correspondant, que le sens de rotation du rotor soit
correcte et que le système se laisse commander facilement.
Testez le bon fonctionnement du levier de commande en
bougeant le bras le plus long de celui-ci sur lequel la tringle de
commande sera fixée par la suite.
5.Assemblage du rotor de queue
d’entraînements et les bouts du tube de queue il faut mettre
les rondelles 118.Mettez du frein filet sur les vis de blocages
110 et serrez celles-ci fortement sur l’axe du rotor de queue.
Veillez à ce que l’ensemble bouge facilement et que le jeu
axial soit vraiment minime.
Fig. TB-04 &-05
6.Assemblage final
6.1. Assemblage du pignon principal
Engagez la pièce hexagonale 25 dans le pignon principal
d’entraînement72. Veillez à ce que le taraudage soit au même
niveau que les perçages afin de pouvoir mettre les vis six pans
creux M4x6mm 108 puis vissez celles-ci.
Fig. AS-01
6.2.Axe de rotor principal – mise en place
Préparez deux cylindres de guidages 26 en plaçant
respectivement deux vis six pans creux M3x3mm 107.
Fig. AS-02
Engagez le premier cylindre de blocage 26 avec l’épaulement
vers le bas sur le roulement à billes 117 et placez ces pièces
dans l’évidement au centre de la mécanique.
Fig. AS-03
Passez l’épaulement du deuxième cylindre de blocage 26 par
en dessous dans le roulement à billes supérieur puis engagez
le pignon d’entraînement principal sur le cylindre de blocage
au centre de la mécanique. Poussez la tête de rotor aussi loin
vers le bas jusqu’à ce que vous arriviez à voir celui-ci qui
dépasse sur le dessous du moteur.
Fig. AS-04
Mettez en place les têtes de rotules sur la partie supérieure
du plateau cyclique.
Fig. AS-05
Après avoir appliqué du frein filet, serrez les vis six pans creux
de blocage des cylindres de blocages et du système de
réception de l’axe du moteur M3x3mm. Les vis de blocages
du pignon principal seront serrées par la suite.
Fig. AS-06
5.1.Pré assemblage des pignons d’entraînements de
l’anti-couple
Fig. TB-01
Glissez deux inserts 23 pour pignons dans les deux pignons
d’entraînements (avant 73& arrière 74). Veillez à les orienter
correctement en fonction des perçages lors de l’assemblage.
Des deux côtés de chaque pignon, engagez – sans les serrer
pour l’instant – les vis six pans M4x4mm 110.
5.2.Pré assemblage du rotor de queue
Fig. TB-02
Glissez les douilles de guidages centrales 67 sur l’axe du
rotor de queue 34. Engagez les afin qu’elles soient engagées
avec une profondeur de 140mm de chaque côté du tube de
queue29.La manière la plus facile est d’utiliser un tube restant
raccourci sur 140mm (pas contenu dans le kit), et de pousser
les douilles dans le tube jusqu’à ce que la fin du tube soit
jointive avec le côté du tube de queue.
Ensuite mettez en place l’embout 68 sur le tube de queue.
Fig. TB-03
Pour l’étape suivante mettez en place le pignon d’entraînement
du rotor de queue 73 sur le bout du tube de queue où le trou
sur trouve à 41mm du bord. Le trou à l’arrière du tube doit avoir
une distance de 20,5mm du bord coupé. A ce niveau la, mettez
en place le pignon d’entraînement 74. Entre les pignons
24
6.3. Mise en place de l’anti-couple
Mettez en place le tube de queue dans la partie de réception
du chassie de telle manière à ce que les pignons
d’entraînements se rejoignent.
Fig. AS-07
Avec les vis M2x6 95 le tube de queue est maintenu en place
au niveau axial. Celle-ci est vissée par la droite.
Fig. AS-08
Avec les vis M2,5x16 (4x98) et M2,5x12 (1x97) fixez la pince
de fixation du tube de queue 71 ainsi vous pincez le tube de
queue et le maintenez en position.
Vous pouvez régler le jeu entre le pignon d’entraînement
principal et le pignon de transmission de queue en déplaçant
le pignon principal en hauteur. Veillez ici également que tout
bouge librement.
Astuce : pour régler correctement le jeu entre les pignons,
coincez un peu de papier buvard entre les dents des pignons.
Serrez les vis de blocages du pignon principal et enlevez le
buvard. La aussi, utilisez du frein filet.
Fig. AS-09
6.4. Mise en place du rotor de queue
Mettez en place le support avant 66 et arrière 65 de l’anti-
couple sur le tube de queue de telle manière à ce que les
petits trous montrent vers le bas.
Page 25

Engagez le rotor de queue assemblé au préalable dans le
corps de l’anti-couple. Les perçages (distance 20,5mm du bout
du tube) doivent êtres jointifs et regarder le perçage
correspondant du corps de l’anti-couple. Fixez le corps de
l’anti-couple sur le tube avec les vis M2x10 96. La vis M2x6 95
garantie qu’il n’y a pas de déplacement axial.
Fig. AS-10
Pour pouvoir commander le rotor de queue, reliez le levier de
commande au servo en mettant en place la tringle 33. Passez
celle-ci par derrière dans les deux support d’anti-couple. Passez
également la tringle par le carcan du palonnier du servo. Ne
vissez rien pour l’instant. La partie tordue de la tringle est tout
d’abord engagée par le dessus dans le levier de commande.
Orientez le rotor de queue en position de neutre. Maintenant
vous placez votre palonnier de telle manière que lorsque le
servo est en position de neutre, le palonnier fait un angle de
10° vers la gauche – en regardant l’hélicoptère du côté gauche.
Vissez maintenant les vis de blocages et assurez les avec du
frein filet.
Fig.AS-11
7. Pales du rotor principal
Fixez les pales de rotor 50 sur le support de pales de rotor
principal à l’aide des quatre tiges filetés M3x16mm 109
Fig. AS-12
8. Assemblage du fuselage
Collez les parties de demi-fuselages avant 41L & 41R et collez
en même temps le crochet de fermeture de la cabine 90 dans
les ouvertures prévues à cet effet. Les vitres (86, 87, 88, 89)
seront également collées sur le fuselage.
Fig. AS-13
Collez les guides 42L & 42R à l’intérieur des demi-fuselages
arrière 43L & 43R. Collez également les stabilisateurs
horizontaux44L & 44R.
Fig. AS-14
A l’aide d’un cutter bien affuté, enlevez le téton qui se trouve
sur la partie arrière gauche du fuselage, en-dessous de
l’évidement pour le corps de l’anti-couple.
Fig. AS-15
Collez les deux parties du stabilisateur vertical 45L & 45R sur
le corps de l’anti-couple, mais par la suite
arrière du fuselage.
Fig. AS-16
Par les côtés, engagez les deux parties de la partie arrière du
fuselage sur les supports situés sur le tube de queue.
Fig. AS-17
Engagez les parties collées avant du fuselage sur les rails
préformés du chassie. Pour enlever à nouveau la partie avant
du fuselage, appuyez par le dessous sur le crochet de
fermeture de la verrière et tirez l’ensemble vers l’avant.
Fig. AS-18
pas avec la partie
9. Centre de gravité
Le centre de gravité devrait être réglé pour le vol stationnaire,
celui-ci se trouve au niveau de l’axe du rotor principal. Pour le
vol de translation nous vous conseillons de déplacer le centre
de gravité vers l’avant. La position du centre de gravité est
influençable en déplaçant l’accu.
Fig. CG (sous démarrage rapide)
25
Page 26

QUICK ST ART
GB
Be sure to read the Safety Notes before operating the model for the first time.
Depending on the version of the FunCopter you have purchased, you may have to install the electronic components.
MUL TIPLEX radio control components for the FunCopter:
AK = Assembled Kit - RR = Ready for Radio
For the AK version:
Tiny S servo 3 x required (roll, pitch-axis, yaw) Order No. 6 5121
or Tiny MG servo 3 x required (roll, pitch-axis, yaw) Order No. 6 5122
MUL TIgyro 300DP gyro Order No. 7 5503
MUL TIcont BL-37/II speed controller Order No. 7 2276
For the AK and RR versions:
RX-6-SYNTH lightreceiver 35 MHz A/B band Order No. 5 5876
alternatively 40 / 41 MHz Order No. 5 5877
or RX-7-DR light M-Link receiver 2.4 GHz Order No. 5 5810
(only in conjunction with a Multiplex 2.4 GHz transmitter)
Recommended flight battery: Li-BA TT FX 3/1-3200 Order No. 15 7371
Li-BATT BX 3/1-3200 Order No. 15 7136
Li-BATT eco 3/1-3000 Order No. 15 7236
Battery charger:
MUL TIcharger LN-3008 EQU Order No. 9 2540
for 2S and 3S LiPo, LiIo and LiFe batteries, also
NiMH and NiCd batteries with four to eight cells
T ools:
Allen keys: 1.5 / 2 / 2.5 / 3 / 4 mm A/F (supplied in the set)
Side-cutters, cross-point screwdriver, slot-head screwdriver (for gyro adjustment), ball-link pliers (recommended).
Please refer to the illustration ‘AS’ when installing the electronics. The assembly instructions include a detailed illustration of
the servo installation.
The gyro must be installed with the correct orientation (the right way round); for more information please read the instructions
supplied with the unit. The gyro should be mounted on double-sided foam tape, as this absorbs vibration.
The receiver , speed controller and battery should be attached using V elcro (hook-and-loop) tape. It is import ant to deploy all
cables in such a way that they cannot foul or become tangled in any moving parts.
It is important to consider the centre of gravity (see Fig. ‘CG’) when installing the flight battery: for hovering the centre of gravity
should be directly below the rotor hub. For higher-speed circuits it is advantageous to position the battery (C.G.) further forward.
The standard pushrods which are installed in the rotor head have proved excellent in practice. For even more accurate finetuning you can use the variable pushrods which are also supplied in the kit: these make it possible to adjust blade tracking (i.e.
set both rotor planes rotating in the same horizontal plane), and thereby minimise vibration caused by imperfect tracking.
Remove the mixer arm pushrods 35 and the snap-fit ball-links 55, and replace them with the variable pushrods (adjustment
links) 13 and screw-fitting ball-links 14: these parts are installed as shown in Figs. MR-05 and MR-06 in the illustrated instructions.
Adjust the pushrod lengths to ensure that there is no stress in the system when the pushrods are installed. Blade tracking can
now be corrected by unscrewing the pushrod on one side, and screwing the pushrod in on the other side by the same number
of turns. This action tilts the rotor yoke, which in turn affects the blade tracking. If you find that blade tracking is worse after
making an alteration, adjust the pushrods again to tilt the rotor yoke in the opposite direction.
26
Page 27

Servo
Battery
S peed controller
Gyro
Servo
Reciever
Abb.AS
Abb. CG
27
Page 28

FunCopter
Specification:
Rotor diameter: 708 mm
Overall length: 855 mm
All-up weight approx. 1250 g
Safety Notes
These safety notes should be stored carefully together with
the building and operating instructions, and must be passed
on to the new owner if you ever dispose of the product. If you
lose the instructions, a duplicate set can be downloaded from
our website www.multiplex-rc.de at any time. Model
helicopters are not suitable for young persons under
sixteen years of age. Y oungsters should only be allowed to
operate this type of model under the instruction and supervision
of an adult with the necessary expertise who is aware of the
hazards involved in the activity .
Model helicopters are not toys in the usual sense of the term,
as they cannot be flown successfully unless the basic skills
are learned first. If you are a beginner, we suggest that you
ask experienced model pilots in your locality for advice and
help, or contact a model flying training centre. Specific helicopter
practice using a model flying simulator can also be very helpful.
In Great Britain addresses of clubs and training centres can
be obtained from the British Model Flying Association (BMF A),
Chacksfield House, 31 St.Andrew’s Road, Leicester , England,
LE2 8RE (www .bmfa.org).
Maintaining and operating model helicopters calls for technical
understanding, a certain minimum level of manual skill, together
with self-discipline and a consciousness of safety matters.
Errors and neglect in maintaining and operating this model
can result in personal injury and damage to property. Since
we, as manufacturers, have no means of ensuring that you
maintain and operate your helicopter competently , all we can
do is expressly draw your attention to these dangers. All
warnings, including those contained in the remainder of these
instructions, must be observed at all times. If you overlook or
neglect them, the result could be serious or even fatal injury.
Caution:
- Before every flight please check that the rotor blades and all
other safety-relevant parts are in place and firmly seated. This
is especially important before the first flight of a session, after
transporting the model, and after any fairly hard landing or
crash. Check before each flight that your radio control system
is working properly and that the power supplies are fully charged
and in good condition.
- Keep your fingers well clear of the rotational plane of the
rotors, as they represent a serious injury risk when they are
spinning. If you are careless, they are certainly capable of
slicing off body parts.
- You alone bear the full responsibility for all consequences
which may arise as a result of operating your model. For this
reason it is essential that you take out proper insurance cover;
ordinary private third-party insurance is not sufficient.
- Before flying the model please inform all spectators about
the possible hazards, and ask them to keep an adequate
minimum distance away .
28
- If your model suffers damage, do not fly it again until you
have repaired all the defects.
- Never fly over people or animals, and do not fly directly towards
them.
- If the model needs repair, be sure to use genuine replacement
parts exclusively .Any claim under guarantee is invalidated if
the model is fitted with spare parts other than genuine items.
- Never fly your model from a public road, in a park, playground
or other public square. For insurance reasons alone you should
only fly your helicopter at an approved model flying site. Ask
at your model shop; the staff are sure to have contact addresses
for local flying clubs.
Examine your kit carefully!
MUL TIPLEX model kits are subject to constant quality checks
throughout the production process, and we sincerely hope that
you are completely satisfied with the contents of your kit.
However, we would ask you to check all the part s - referring to
the Parts List - before you start construction, as we cannot
exchange components which you have already modified.
If you consider any part to be unacceptable for any reason, we
will readily correct or exchange it once we have examined the
faulty component. Just send the offending item to our Model
Department. Please be sure to include the purchase receipt
and the enclosed complaint form, duly completed.
We are constantly working on improving our models, and for
this reason we must reserve the right to change the kit contents
in terms of shape or dimensions of parts, technology , materials
and fittings, without prior notification. Please understand that
we cannot entertain claims against us if the kit contents do
not agree in every respect with the instructions and the
illustrations.
Like every flying machine, this model has static limits!
Extreme flying loads and pointless, ridiculous manoeuvres
may result in the loss of the model. Note: in such cases we
will refuse to replace broken parts. Please fly sensibly,
and approach the helicopter’s limits cautiously.
Mechanical adjustments:
The FunCopter is set up to suit the beginner perfectly . If you
prefer a more agile model, it is possible to re-connect the
pushrods to the outer holes in the servo output arms
(Caution: greater forces act upon the servos! If the rotor
should make ground contact, there is a much greater risk of
servo damage), and to re-connect the pre-formed rods (32)
further outboard at the rotor head.
1. Operating the model for the first time
Check the contents of your set before operating the model for
the first time.
Note: the model is factory-assembled, but you are
exclusively responsible for carrying out final checks on
the helicopter’s construction, and when flying the model.
Please take the trouble to check every screw and every
adjustment; this applies in particular to the settings and
direction of rotation of the servos.
2. Completing the helicopter
In addition to checking the model, you will need to carry out a
certain amount of work which varies according to the version
you have purchased.
AK (Assembled Kit) = all the radio control components have
to be installed.
Page 29

The model has been tested exhaustively in conjunction with
the recommended components, and all the items harmonise
well together. If you prefer to use your own choice of equipment,
you do so at your own discretion, and you must accept the
responsibility for the results.
RR(Ready for Radio) = just the receiver remains to be installed.
Secure all loose cables using the cable ties supplied, and
ensure that they cannot foul or become tangled in the gearbox
or pushrods.
The model is designed for a 3S LiPo flight battery (11.1 V minimum current delivery capacity 35 A). W e recommend that
you use the stated batteries. The price : performance ratio of
these packs is excellent, and they match the system perfectly .
However, if you wish to use a dif ferent battery, please note that
it is essential to check and observe the model’s Centre of
Gravity .
Before every flight the airborne battery must be fully charged
using a suitable battery charger .
Adjust the tail rotor linkage in such a way that it exploits the
full mechanical travel. If you have to limit servo throw , we advise
the use of the “Dual Rate” or “Travel Limit” function - assuming
that you have a computer transmitter . If your system does not
offer this facility , you may need to move the articulated barrel
on the servo output arm further inward (towards the centre).
The gyro used in this model is operated in heading lock mode
(for more information please read the instructions supplied with
the gyro).
When you apply full travel to one side and then release the
stick, in Standard mode the t ail rotor servo would quickly return
to the neutral position when you let go of the stick.
Inheading lock mode the tail rotor servo tends to “stay put”
at full travel. Don’t be worried by this response: if you find that
the tail rotor “runs away” when the helicopter is stationary,
check the trim value of the tail rotor signal (for computer
systems: there must be no mixers acting upon the tail rotor
signal. Use a four-channel fixed-wing program for the
FunCopter).
3. Checking the working systems, settings
As a minimum this model requires a simple four-channel radio
control system, without any mixers. Connect the system
components as described in the manufacturer’s operating
instructions.
In the interests of safety you should remove the main
rotor blades before running up the motor for the first time,
and hold the model securely by the battery cradle. Ensure
that the motor cannot start running when you switch the
system on.
If you wish to check the function of the tail rotor with the
motor running but the main rotor removed, it is essential
to keep the system speed down to a very low level. Under
normal circumstances the main rotor acts as a brake on
the system. Without the main rotor fitted, the tail rotor
will quickly accelerate to speeds which are beyond its
safe capacity. At such high speeds the tail rotor will
probably fail, and could easily cause damage and injury .
When all the transmitter trims are at “neutral” (centre), all the
servo output arms should also be at the stated neutral
positions, and the swashplate should be exactly level. If this
is not the case, adjust the pushrod connectors.
When you apply a right “roll” (aileron) command, the swashplate
should tilt to the right (left command: left tilt).
When you apply a “forward cyclic” (down-elevator) command,
the swashplate should tilt forward (back cyclic: back tilt).
Mechanical adjustments:
The FunCopter is set up to suit the beginner perfectly . If you
prefer a more agile model, it is possible to re-connect the
pushrods to the outer holes in the servo output arms
(Caution: greater forces act upon the servos! If the rotor
should make ground contact, there is a much greater risk of
servo damage), and to re-connect the pre-formed rods (32)
further outboard at the rotor head.
If you apply a tail rotor (rudder) command - stick right - the tail
rotor pushrod should move towards the tail (left rudder: pushrod
moves forward).
If the helicopter is subjected to a major change in temperature,
we recommend that you leave the gyro and the receiver
switched on for about five minutes before flying. Switch the
system off after this period, then on again: the FunCopter is
now ready for the air .
The direction of gyro effect can be changed using the
REVERSE <- -> slide switch:
Y ou can check the direction of ef fect of your gyro by abruptly
rotating the helicopter around its vertical axis. If the gyro
responds in the wrong direction, then the position of the
REVERSE <- -> switch is incorrect: it can be changed using
a tool such as a small screwdriver. The switch is located at
the right-hand end of the case.
Remember to switch the RC system off before changing the
switch position.
Note
More information regarding the gyro can be found in the
instructions included in the set.
4. Final checks
a. The tail rotor should be free-moving.
b. Install the main rotor blades again. The blades should move
freely up and down, without any tendency to bind, and engage
fully in the working position.
c.The swivel links should be tightened evenly and adequately,
in order to prevent them falling forward or back through gravity
alone.
d. All the electrical connections must make 100% contact:
the plugs should be pushed fully into their sockets, and all
loose cables should be secured using cable ties.
e. The cabin must snap fully into place.
f. Check the Centre of Gravity by lifting the helicopter by the
auxiliary rotor between two fingers: the machine should now
hang with the tail boom horizontal.Any corrections required
can generally be achieved by re-positioning the flight battery . If
not, add nose or tail ballast as required.
g.After every five to ten hours of flying check the washers 118,
and replace them if they show signs of wear .
5. Range-checking
Before you carry out a range-check it is essential to remove
29
Page 30

the rotor blades from the blade holders; this minimises the
risk of injuring someone or damaging property if interference
occurs during the check, causing the motor to burst into life
unexpectedly . We recommend that you place the model on a
table for range-checking; leaving the model on the ground could
result in false readings.
Whenever you carry out a range-check, repeat the procedure
with the motor running and with the motor stopped. Helicopters
must never be fixed to the ground, as this can easily cause a
build-up of resonances which may completely wreck the model.
Ask a friend to stay close to the model and inform you when
and if “servo jitter” occurs, while you walk away from it carrying
the transmitter.The range-check itself should be carried out in
accordance with the RC system manufacturer’s instructions.
6. First flight
For the first flight wait for a day with as little wind as possible.
It is always best to fly your model at an approved model flying
site.The first reason is that of legality, but just as import ant is
that you will usually find expert help there - especially if you
are a beginner.
We also recommend that you fit a training landing gear,
as this makes it less likely that the helicopter will tip
over. Place the machine on the ground about 5 m away
from you, facing directly into any breeze. Closely-mown
grass or a tarmac surface is advantageous, as the skids
are not so likely to get caught up, and the tail rotor can
spin freely without obstruction.
After a final check of the working systems, cautiously and
gradually open the throttle until the helicopter becomes “light
on its feet”; at this point you can check that all the functions
work properly , and that the model’s basic trim is correct.
For the first few flights keep the helicopter flying at a height of
about 1 to 1.5 m above the ground - no higher. On the other
hand, don’t keep it too low: it is not a good idea to just let it
skid around on the ground. It is also sensible to avoid letting
the machine fly any further away from you than ten to twenty
metres, but for safety reasons you should not fly closer to
yourself than five metres. If things get out of hand, land the
helicopter immediately. Don’t be tent ative with the throttle stick,
but on the other hand never move it abruptly. If a crash or a
hard landing is inevitable, it is often safer just to switch the
motor off, as the model will then generally “survive” the crash
with less damage than in a “power-on” arrival.
7. First circuits
When you feel reasonably confident of hovering the model in
front of you, it is time to alter your position: stand to one side
of the helicopter, again at a dist ance of about 5 m, and hover
the model in the usual way from this position. Now try flying
the machine slowly forward. The helicopter should always
maintain the same position relative to you. Keep your distance
and height, and turn with the model as it flies forward. Don’t be
downhearted if the first circuit does not work out well: just land
the helicopter and try again. It should be borne in mind that
the FunCopter has a tendency to balloon up (nose high) when
descending. Keep this in mind, and push the nose down slightly
to compensate. If the ballooning tendency is too pronounced
for comfort, reduce the rate of descent.
T o lose height you must reduce the throttle setting, but please
note that you must never shut the motor down completely . If
the rotor falls below a very low basic speed you may find that
the rotor blades fold upward in response to the machine’s rate
of descent, and there is no way to correct this.
8. Flying figures-of-eight
The next hurdle is “flying towards yourself”. This is much more
30
challenging, and to make things easier it is best always to
start by flying “eights” into wind, in front of you. Y ou will soon
notice that this is much more difficult than flying around yourself.
Initially simply fly to left and right, then expand the manoeuvre
into a flat figure-of-eight. The more practice you put in, the
rounder and larger the “eights” become.
9. Landing, emergency landings
The simplest way to land is from the hover: simply reduce the
throttle setting slowly, and wait for the model to respond - if
the helicopter descends too fast for a comfortable flare, you
need to open the throttle again slightly . Keep things steady there is no need to do anything hastily.
From forward flight you should first reduce the throttle setting
and apply “back-cyclic” (pitch-axis, or up-elevator control) to
slow the machine down, then carefully open the throttle again
a little as the machine makes the transition to the hover. From
this point you can land the helicopter as if from the hover.
If things really get out of hand, and a crash or hard landing is
unavoidable, it is often advisable simply to switch the motor off
completely , as the model then has a better chance of surviving
the crash than if the rotor strikes an obstacle whilst under
power.
10. Vibration
The FunCopter is a fixed-pitch helicopter, i.e. its rotor speed
varies constantly according to the momentary phase of flight.
During a descent the rotor speed may become so low that the
model starts to resonate, i.e. it starts to vibrate. Don’t panic if
this occurs: simply raise the rotor speed until the FunCopter
“calms down” again - which happens very quickly .
When the rotor is running up to speed it is normal for the
helicopter to shake briefly; this is due to fundamental resonance
which will cease immediately if you raise the rotor speed briskly .
If you notice persistent vibration after a crash or transport
damage, then something is not in order: check whether the
main rotor shaft or tail rotor shaft is bent by removing the shafts
and rolling them on a perfectly flat table top. If you find even
minimal distortion, replace the offending item.
The model will still fly when persistent vibration is present, but
please remember that vibration places a severe load on the
helicopter’s components - especially the electronic units - and
they may suffer long-term damage as a result. If the model
vibrates even though it has not suffered damage in a crash, it
may be necessary to re-balance the rotor blades. This is
accomplished by applying adhesive tape in the region of the
blade’s Centre of Gravity (outside end of the moulded-in
turbulator - raised plastic lug - on the top surface of the blade)
until the rotor blades are accurately balanced to within a tenth
of a gramme.
11. Safety
Safety is the First Commandment when flying any model
aircraft. Third party insurance should be considered a basic
essential. If you join a model club, suitable cover will usually
be available through the organisation. It is your personal
responsibility to ensure that your insurance is adequate
(powered model aircraft).
Make it your job to keep your models and your radio control
system in perfect order at all times. Check the correct charging
procedure for the batteries you are using. Make use of all sensible safety systems and precautions which are advised for
your system. An excellent source of practical accessories is
the MUL TIPLEX main catalogue, as our products are designed
and manufactured exclusively by practising modellers for other
practising modellers.
Page 31

Always fly with a responsible attitude. Y ou may think that flying
low over other people’s heads is proof of your piloting skill;
others know better. The real expert does not need to prove
himself in such childish ways. Let other pilots know that this
is what you think too. Always fly in such a way that you avoid
endangering yourself and others. Bear in mind that even the
best RC system in the world is subject to outside interference.
No matter how many years of accident-free flying you have
under your belt, you have no idea what will happen during the
next minute.
12. Transport
The set includes a rotor blade support designed to avoid damage
when transporting the FunCopter. Simply fold the rotor blades
back, push them into the two slots in the rotor blade support,
then push the bottom opening in the support over the tail boom.
The FunCopter is now in a compact form, and can be transported
safely.
All of us in the MUL TIPLEX team hope you have many hours of
pleasure building and flying your new model.
MULTIPLEX Modellsport GmbH & Co. KG
Product development and maintenance
Klaus Michler
Repair notes:
The model is extremely robust - but accidents do happen. For
the purpose of possible repairs we have divided the helicopter
into five sub-assemblies:
to dismantle and re-assemble each sub-assembly as required.
The following replacement parts are available:
Replacement parts
T ail rotor blades (pair) # 22 3001
Main rotor shaft # 22 3002
Blade holders, 5° # 22 3003
Gear set # 22 3004
Pushrod set # 22 3005
Rotor head lever set # 22 3006
Swashplate set # 22 3007
Pitch-axis rocker set # 22 3008
Servo output arm set # 22 3009
Rotor head set # 22 3010
Auxiliary rotor set # 22 3011
T ail rotor shaf t # 22 3012
T ail boom set # 22 3013
T ail rotor linkage set # 22 3014
T ail rotor housing set # 22 3015
Chassis set # 22 3016
Skid holders (pair) # 22 3017
Landing gear set # 22 3018
Decal sheet # 22 3019
Front fuselage fairing + glazing decals # 22 3020
Rear fuselage fairing + tail panels # 22 3021
Main rotor blades (pair) # 22 3022
Adjustment wire (pair) # 22 3023
Rotor blade support # 22 3024
Washer , 7 Ø x 2 Ø x 0.3 mm (10 off) # 22 3025
Rotor boss seperate # 22 3026
T ail gear box with foam parts # 22 3027
Brushless motor (Himax C 6310-0225) # 33 3070
1. Chassis and landing gear
2. Main rotor
3.T ail rotor
4.T ail boom
5. Fuselage
The graphic illustrations are designed to make it a simple matter
Tips for setting up the transmitter:
If you are using a programmable transmitter, we recommend the following settings:
Y ou can use a simple fixed-wing model memory for the FunCopter , as this avoids unwanted mixers which affect the tail rotor .There is no need to use
a helicopter program.
For “pitch-axis” (“elevator”) and “roll-axis” (“aileron”) you may wish to apply Expo, Dual Rates or reduced travels, depending on the control response you
prefer with your FunCopter. For the tail rotor function you should only use Dual Rates or reduced travel in order to adjust the tail rotor response to suit
your flying style.
We have found it pleasant to fly the model using two flight phases: the first for hovering, where the FunCopter is trimmed out carefully so that it remains
virtually stationary in the air.The second flight phase is then set up with a small trim value for “forward pitch” (down-elevator). This gives the model a
constant tendency to fly forward, which makes circuit flying more comfortable.
We recommend the following values for MUL TIPLEX systems:
Function Flight phase “Hover” Flight phase “Circuit”
Pitch-axis (elevator) Expo: 30%, Travel: 70% Travel: 100%, Trim approx.
5% forward / down
Roll-axis (aileron) Expo: 30%, Travel: 70% Travel: 100%
T ail rotor (rudder) Travel: 60% Travel: 60%
31
Page 32

Parts List - FunCopter
AK RR
Part No. No. Description Material Dimensions Included in the
No. off off replacement parts pack
1 1 1 Model instructions Paper
2 1 1 Motor instructions Paper
3 0 1 Speed controller instructions Paper
4 0 1 Gyro instructions Paper
8 1 1 Allen key Metal 1.5 mm A/F
9 1 1 Allen key Metal 2 mm A/F
10 1 1 Allen key Metal 2.5 mm A/F
11 1 1 Allen key Metal 3 mm A/F
12 1 1 Allen key Metal 4 mm A/F
13 2 2 Adjustment link Metal M2 x 12 1.8 Ø x 12 x 42.5 mm # 223023 (2 x)
14 2 2 Screw-fitting ball-link Plastic Ready made # 223023 (2 x)
15 3 0 Velcro tape, hook Plastic 25 x 60 mm # 6831 12 (5 x)
16 3 0 Velcro tape, loop Plastic 25 x 60 mm # 683112 (5 x)
17 4 0 Cable tie Plastic 98 x 2.5mm
18 6 0 Servo retaining screw Metal 2.2 x 13 mm # 682652 (50 x)
20 3 3 Articulated barrel Metal Machined, 6 mm Ø # 223009 (1 x)
21 2 2 Retaining bracket Metal Die-cut 1.5 mm # 223016 (2 x)
22 8 8 Cable tie Plastic 142 x 2.5 mm # 223017 (4 x)
23 2 2 Hexagon insert, bevel gear Metal 5.9 A/F x 1.9 Ø x 10.5 mm # 223004 (2 x)
24 1 1 Control yoke collet Metal 8 Ø x 3.2 Ø x 5 mm # 223014 (1 x)
25 1 1 Hexagon insert, main bevel gear Metal 11.9 A/F x 4.05 Ø x 16 mm # 223004 (1 x)
26 3 3 Collet bush Metal 11 Ø x 4.95 Ø x 4.05 Ø x 9.1 mm # 223002 (1 x)
27 1 1 Control yoke bush Metal 6 Ø x 3 Ø x 1.9 Ø x 10 mm # 223014 (1 x)
1 1 T ail rotor shaf t Metal 4 Ø x 4 A/F x 1.9 Ø x 51 mm # 223012 (1 x)
28
29 1 1 Tail boom Metal 12A/F x 0.4 x 450 mm # 223013 (1 x)
30 2 2 Landing gear leg Spring steel 1.8 Ø x 160 x 49 mm # 223018 (2 x)
31 1 1 Main rotor shaft Hardened steel 4 Ø x 200 mm # 223002 (1 x)
32 2 2 Double-bend main rotor rod Spring steel 1.8 Ø x 16 x 19 mm # 223005 (2 x)
33 1 1 T ail rotor pushrod Spring steel 1.8 Ø x 537 mm # 223013 (1 x)
34 1 1 T ail rotor shaft Spring steel 1.5 Ø x 478 mm # 223013 (1 x)
35 2 2 Mixer arm pushrod Spring steel 1.8 Ø x 45 x 14 mm # 223005 (2 x)
36 1 1 Pitch-axis pushrod S pring steel 1.8 Ø x 75 mm # 223005 (1 x)
37 1 1 T ail rotor pushrod Spring steel 1.8 Ø x 83 x 17 mm # 223005 (1 x)
38 1 1 Roll pushrod S pring steel 1.8 Ø x 90 mm # 223005 (1 x)
39 1 1 Tail skid Spring steel 1.8 Ø mm # 223015 (1 x)
40 1 1 Flybar Spring steel 1.8 Ø x 215 mm # 223011 (1 x)
41L 1 1 L.H. front fuselage Foam plastic Ready made # 223020 (1 x)
41R 1 1 R.H. front fuselage Foam plastic Ready made # 223020 (1 x)
42L 1 1 L.H. rear fuselage Foam plastic Ready made # 223021 (1 x)
42R 1 1 R.H. rear fuselage Foam plastic Ready made # 223021 (1 x)
43L 1 1 L.H. fuselage locating piece Foam plastic Ready made # 223021 (1 x)
43R 1 1 R.H. fuselage locating piece Foam plastic Ready made # 223021 (1 x)
44L 1 1 L.H. horizontal stabiliser Foam plastic Ready made # 223021 (1 x)
44R 1 1 R.H. horizontal stabiliser Foam plastic Ready made # 223021 (1 x)
45L 1 1 L.H. vertical stabiliser Foam plastic Ready made #
45R 1 1 R.H. vertical stabiliser Foam plastic Ready made # 223021 (1 x)
46 1 1 Rotor blade support Foam plastic Ready made # 223024 (1 x)
49 1 1 Decal sheet Printed plastic film Ready made # 223019 (1 x)
50 2 2 Main rotor blade Inj.-moulded plastic Ready made # 223022 (2 x)
51 1 1 Auxiliary rotor Inj.-moulded plastic Ready made # 22301 1 (1 x)
52 1 1 Rocker Inj.-moulded plastic Ready made # 223011 (1 x)
53 1 1 Upper swashplate Inj.-moulded plastic Ready made # 223007 (1 x)
54 1 1 Lower swashplate Inj.-moulded plastic Ready made # 223007 (1 x)
55 4 4 Snap-fit ball-link Inj.-moulded plastic Ready made # 223005 (4 x)
56 1 1 Pushrod Inj.-moulded plastic Ready made # 223006 (1 x)
57 1 1 Main rotor hub Inj.-moulded plastic Ready made # 223010 (1 x)
59 2 2 Mixer arm Inj.-moulded plastic Ready made # 223006 (2 x)
60 1 1 Adjustment lever Inj.-moulded plastic Ready made # 223006 (1 x)
61 1 1 Swivel link Inj.-moulded plastic Ready made # 223006 (1 x)
62 1 1 Rotor yoke Inj.-moulded plastic Ready made # 223010 (1 x)
Assembly and adjustment tools
Small parts set, AK
Small parts (fitted)
# 223018 (8 x)
# 223018 (8 x)
# 223014 (2 x)
# 223012 (1 x)
# 223014 (1 x)
# 223027 (1 x)
Fuselage fairing + decal sheet (fitted)
223021 (1 x)
# 223027 (1 x)
# 223027 (1 x)
Injection-moulded plastic parts (fitted)
# 223026 (1 x)
# 223010 (1 x)
32
Page 33

AK RR
Part No. No. Description Material Dimensions Included in the
No. off off replacement parts pack
63 1 1 L.H. landing gear skid Inj.-moulded plastic Ready made # 223018 (1 x)
64 1 1 R.H. landing gear skid Inj.-moulded plastic Ready made # 223018 (1 x)
65 1 1 Rear tail rotor bracket Inj.-moulded plastic Ready made # 223013 (1 x)
66 1 1 Front tail rotor bracket Inj.-moulded plastic Ready made # 223013 (1 x)
67 3 3 Central bush Inj.-moulded plastic Ready made # 223013 (2 x)
68 2 2 End bush Inj.-moulded plastic Ready made # 223013 (2 x)
69 1 1 L.H. pitch-axis rocker Inj.-moulded plastic Ready made # 223008 (1 x)
70 1 1 R.H. pitch-axis rocker Inj.-moulded plastic Ready made # 223008 (1 x)
71 1 1 Tail boom clamp Inj.-moulded plastic Ready made # 223016 (1 x)
72 1 1 Main bevel gear Inj.-moulded plastic Ready made # 223004 (1 x)
73 1 1 Front tail rotor shaft bevel gear Inj.-moulded plastic Ready made # 223004 (1 x)
74 1 1 Rear tail rotor shaft bevel gear Inj.-moulded plastic Ready made # 223004 (1 x)
75 1 1 T ail rotor shaft bevel gear Inj.-moulded plastic Ready made # 223004 (1 x)
76 3 3 Twin servo output lever Inj.-moulded plastic Ready made # 223009 (1 x)
77 2 2 Pitch-axis link Inj.-moulded plastic Ready made # 223008 (2 x)
78 2 2 Skid holder Inj.-moulded plastic Ready made # 223017 (2 x)
79 1 1 Chassis Inj.-moulded plastic Ready made # 223016 (1 x)
80 2 2 Tail rotor blade Inj.-moulded plastic Ready made # 223001 (2 x)
81 1 1 Tail rotor housing Inj.-moulded plastic Ready made # 223015 (1 x)
82 1 1 Tail rotor bellcrank Inj.-moulded plastic Ready made #
83 1 1 Control yoke Inj.-moulded plastic Ready made # 223014 (1 x)
84 1 1 Tail rotor hub Inj.-moulded plastic Ready made # 223014 (1 x)
85 1 1 Bearing bracket Inj.-moulded plastic Ready made # 223016 (1 x)
86 1 1 L.H. rear glazing panel Inj.-moulded plastic Ready made # 223020 (1 x)
87 1 1 R.H. rear glazing panel Inj.-moulded plastic Ready made # 223020 (1 x)
88 1 1 L.H. front glazing panel Inj.-moulded plastic Ready made # 223020 (1 x)
89 1 1 R.H. front glazing panel Inj.-moulded plastic Ready made # 223020 (1 x)
90 1 1 Canopy latch Inj.-moulded plastic Ready made # 223020 (1 x)
91 2 2 Blade holder 5° => 5-point Plastic Ready made # 223003 (2 x)
Standard parts (fitted)
95 8 8 Socket-head cap screw Metal M2 x 6 mm # 223007 (6 x)
96 4 4 Socket-head cap screw Metal M2 x 10 mm # 223006 (2 x)
97 5 5 Socket-head cap screw Metal M2.5 x 12 mm # 223016 (1x)
98 4 4 Socket-head cap screw Metal M2.5 x 16 mm # 223016 (4 x)
99 3 3 Socket-head cap screw Metal M3 x 12 mm # 223010 (1 x)
100 2 2 Socket-head cap screw Metal M3 x 20 mm # 223003 (2 x)
101 2 2 Socket-head cap screw Metal M4 x 8 mm # 223016 (2 x)
102 2 2 Socket-head cap screw Metal M5 x 35 mm # 22301 1 (2 x)
103 2 2 Countersunk screw Metal M2.5 x 25 mm # 223008 (2 x)
104 3 3 Washer Metal 2.2 Ø mm (M2) # 223006 (2 x)
105 1 1 Washer Metal 3.2 Ø mm (M3) #
106 2 2 Washer Plastic 3.2 Ø mm (M3) # 223001 (2 x)
107 10 10 Grubscrew Metal M3 x 3 mm # 223002 (2 x)
108 2 2 Grubscrew Metal M4 x 6 mm # 223004 (2 x)
109 6 6 Grubscrew Metal M3 x 16 mm # 223001 (2 x)
110 4 4 Grubscrew Metal M4 x 4 mm # 223022 (2 x)
111 4 4 Dowel pin, hardened Metal 1.5 Ø m6 x 20 mm # 223001 (2 x)
112 1 1 Dowel pin, hardened Metal 2 Ø m6 x 16 mm # 223006 (1 x)
113 1 1 Dowel pin, hardened Metal 3 Ø m6 x 28 mm # 223010 (1 x)
114 3 3 Self-locking nut Metal M3 # 223010 (1 x)
115 1 1 Ring bearing (radial bearing) Metal 21 Ø x 15 Ø x 4 mm # 223007 (1 x)
116 1 1 Ballrace Metal 13 Ø x 7 Ø x 4 mm # 223015 (1 x)
117 3 3 Ballrace Metal 11 Ø x 5 Ø x 4 mm # 223015 (1 x)
118 2 2 Washer Plastic 7 Ø x 2 Ø x 0.3 mm # 223004 (2 x)
119 4 4 Self-locking nut Metal M2.5 # 223016 (4 x)
RC components (fitted)
120 1 1 Brushless motor Himax C 6310-0225 Ready made # 333070 (1 x)
121 0 3 Servo, excl. lever / incl. screws Tiny-S Ready made # 65121 (1 x)
122 0 1 S peed controller MULTIcont BL-37/II Ready made # 72276 (1 x)
123 0 1 Gyro + 2 mounting pads MULTIgyro 300DP Ready made # 75503 (1 x)
15 0 3 Velcro tape, hook Plastic 25 x 60 mm # 683112 (5 x)
16 0 3 Velcro tape, loop Plastic 25 x 60 mm # 683112 (5 x)
17 0 4 Cable tie Plastic 98 x 2.5mm
18 0 6 Servo retaining screw Metal 2.2 x 13 mm #
# 223027 (1 x)
223014 (1 x)
# 223015 (1 x)
# 223016 (1 x)
# 223014 (1 x)
# 223015 (1 x)
# 223016 (2 x)
# 223014 (1 x)
223010 (1 x)
# 223009 (1 x)
# 223014 (3 x)
# 223010 (2 x)
# 223016 (2 x)
# 223025 (10x)
682652 (50 x)
33
Page 34

Important note
The model’s fuselage is moulded in EPP, i.e. it is impossible
to glue these parts using white glue, polyurethane or epoxy
adhesives.
We recommend the use of hot-melt adhesive to join parts made
of this material.
1. Before construction
Before you start assembling the model please check the
contents of your kit.
Y ou will find Figs. 1 + 2 and the Parts List helpful at this stage.
Several ball-links have to be fitted during the construction of
the FunCopter. If you find that these links are unacceptably
stiff in operation, you can correct this by carefully squeezing
the socket using a pair of pliers.
2. Assembling the mechanics
2.1 Assembling the landing gear
Fig. CH-01
Push the wire landing gear legs 30 into the two skids 63 and
64 and position them exactly as shown.
Fix the skid legs to the leg supports using the four cable ties
22.
Fig. CH-02
2.2 Servo installation
The next step is to install the three servos (Tiny-S, # 6 5121,
alternatively Tiny-MG # 6 5122). Place the servos in the chassis
79. Ensure that the tail rotor servo (left) and the roll servo (right,
rear) are installed with the splined output shaft facing up. The
output shaft of the pitch-axis servo (right, front) must be at the
bottom. Each servo is fixed to the chassis using two 2.2 x 13
mm screws 18.
Fig. CH-03
the right, engaging the retaining bracket exactly as shown.
Adjust the position of the motor so that the threaded hole on
the opposite side is in line with the notch in the chassis. Apply
a drop of thread-lock fluid to the screw, and tighten it firmly.
Fig. CH-08
Now screw the second retaining bracket 21 on the left-hand
side of the chassis 79.Apply a drop of thread-lock fluid to the
second M4 x 8 screw 101, and tighten the screw fully.
Fig. CH-09
2.5 Attaching the landing gear
Engage the landing gear legs in the skid holders.
Fig. CH-10
Attach the landing gear legs to the skid holders using the four
142 x 2.5 mm cable ties 22.
Fig. CH-11
2.6 Fitting the bearing bracket
Push the 11 Ø x 5 Ø x 4 mm ballrace 117 into the bearing
bracket 85.
Fig. CH-12
Fix the bearing bracket to the top of the chassis 79 from the
left, using the two M3 x 12 mm screws 99.
Fig. CH-13
2.7 Installing the pitch-axis rocker
Slip the two pitch-axis links 77 onto the left-hand pitch-axis
rocker69. Press the prepared pitch-axis rocker onto the spigot
of the bearing bracket from the left-hand side. The right-hand
pitch-axis rocker 70 can now be fitted from the right-hand side.
Join the parts of the pitch-axis rocker using the two M2.5 x 25
mm screws 103.
Fig. CH-14
Check from the transmitter that the servos are at centre. The
three Twin output arms 76 can now be fitted. The articulated
barrel20 for the tail rotor servo should be installed in the inner
holes of the output lever , whereas the outer holes should be
used for the other servos. Screw an M3 x 3 mm grubscrew
107 into each articulated barrel, but leave them loose for the
moment. Press the prepared output levers onto the servo output
shafts, taking care to position them correctly (neutral position),
and fit the 2.3 x 5 mm output screws to secure them. The
output lever of the tail rotor servo should face up and be angled
forward by 10° (see also Stage 6.4). The output arms for the
pitch-axis and roll servos should be horizontal, facing the tail.
Figs. CH-04 & -05
2.3 Fitting the skid holders
Fix the two skid holders 78 to the underside of the chassis 79
using two M2.5 x 12 mm screws 97 each.
Fig. CH-06
2.4 Installing the motor
Place the motor 120 in front of you with the projecting cables
(top) facing left (between 7 o’clock and 8 o’clock). Attach the
first of the two retaining brackets 21 to the right-hand threaded
hole in the motor (as seen from above) using one of the M4 x
8 screws 101. Leave the screw loose initially .
Fig. CH-07
Slide the motor and the retaining clip onto the chassis 79 from
2.8 Fitting the pushrods
Fit the pitch-axis pushrod 36 and the roll pushrod 38 in the
snap-fit ball-links 55, and engage the snap-fit locks.
Fig. CH-15
2.9 Installing the swashplate
Press the 21 Ø x 15 Ø x 4 mm ring bearing 115 into the upper
swashplate 53 and fit the three M2 x 6 mm screws 95.Apply
a little oil to the ring bearing.
Fig. CH-16
Press the lower swashplate 54 into the upper swashplate, and
fit three further M2 x 6 mm screws 95 to join the two halves.
Check that the swashplate moves freely .
Fig. CH-17
Now place the swashplate on the pivot ball of the bearing
bracket and press the pitch-axis links 77 onto the outer balls
of the swashplate.
Fig. CH-18
2.10 Installing the pushrods
Press the pitch-axis pushrod 36 onto the linkage ball attached
to the pitch-axis rocker.The roll pushrod 38 should be pressed
onto the swashplate ball which projects to the right. Route the
pushrods through the articulated barrels mounted on the servo
output levers. Set the swashplate exactly horizontal, and ensure
that the servo output levers are also at their correct neutral
34
Page 35

positions. When you are sure of this, apply a drop of threadlock fluid to the grubscrews in the articulated barrels, and tighten
them firmly .
Fig. CH-19
2.11 Inst alling the electronics
Install the speed controller, the gyro and the receiver on the
left-hand side of the mechanics, as shown in the illustration.
We recommended double-sided foam tape for this, as the
material absorbs vibration, and helps to prevent damage to the
electronic units.
When installing the gyro it is important to orientate it correctly .
Refer to the gyro instructions for more information.
The set is supplied with four cable ties 17 which can be used
to deploy the cables neatly .
Fig. CH-20
3 Completing the main rotor
3.1 Assembling the rotor head
Press the pushrod 56 onto the adjustment lever 60. Push the
swivel link 61 into the rear socket of the adjustment lever and
connect the parts by pressing the 1.5 Ø m6 x 20 mm dowel
pin 111 into place. Secure the dowel pin from one side with a
little cyano glue, but please take great care to avoid the adhesive
running into the swivel link. The next step is to slip the rotor
hub57 through the adjustment lever. Insert the second 1.5 Ø
m6 x 20 mm dowel pin 111 to connect the rotor hub to the
adjustment lever, and apply a drop of cyano to secure the
dowel pin as described previously .
Fig. MR-01
rotor yoke on the other side. Fit a 5 Ø x 2 Ø x 0.3 mm washer
104 between the screw-head and the mixer arm on each side.
Fit the angled end of the mixer arm pushrods through the outer
hole in the mixer arms.
Fig. MR-06
3.3 Auxiliary rotor
The two M5 x 35 mm socket-head cap screws 102 act as
centrifugal weights in the auxiliary paddle blades, and should
be screwed into the tips of the auxiliary rotor blades 51. Tighten
one fully, but leave the other one slightly loose, so that the
flybar can be fitted in the next stage.
Fig. MR-07
Place the auxiliary rotor on the rocker , and slide the flybar 40
through the appropriate hole in order to connect the auxiliary
rotor to the rotor head. Use a length of thin wire or similar to
push the flybar through as far as it will go. Now tighten the M5
x 35 screw which you previously left loose. Connect the pushrod
56 to the auxiliary rotor.
Fig. MR-08
3.4 Completing the main rotor shaft
Figs. MR-09 & -10
Push the main rotor shaft 31 into the rotor hub 57 from the
underside, noting that the notch which locates it in the rotor
hub must be at the top. Now look through the hole in the rotor
hub and rotate the shaft to the point where the M3 x 12 mm
screw 99 can be inserted unhindered. Fit a 6 Ø x 3.2 Ø x 0.3
mm washer 105 between the screw-head and the rotor hub.
Secure the screw by fitting the M3 self-locking nut 114.
The next step is to fit the rotor yoke 62. This part features an
opening at one end, and two integral depressions at the other.
Fit this part on the rotor hub 57 in such a way that the pushrod
56 projects through the opening, and the two depressions are
on the underside. Secure the rotor yoke by pressing the 3 Ø x
28 mm dowel pin into place. Push the dowel pin through to the
point where it lies flush with the opening for the pushrod; the
dowel pin must not project into the opening.
Fig. MR-02
Position the rocker 52 between the rotor hub bearing brackets,
and secure it by inserting the 2 Ø m6 x 16 mm dowel pin 112.
Apply a little cyano to the dowel pin as already described, and
check that the parts move freely.
Fig. MR-03
The blade holders 91 feature moulded-in points which mark
the pitch angle (5°); they must be installed with these points
visible at the top. Secure the blade holders using the two M3 x
20 mm socket-head cap screws 100.
Fig. MR-04
3.2 Rotor head linkage and mixer
Fit the two mixer arm pushrods 35 in the snap-fit ball-links 55
and engage the snap-fit locks.
Fig. MR-05
The two mixer arms 59 are attached to the rocker using the
M2 x 10 mm screws 96; note that the flat face of the mixer
arms must face the rocker. Press the double-bend main rotor
rods 32 into the outer holes, and the mixer arm pushrods 35
into the inner holes, before tightening the M2 screws fully; the
double-bend rods should be inserted in the outer hole in the
4 Assembling the tail rotor
4.1 T ail rotor shaf t
Fig. TR-01
Slide the tail rotor shaft bevel gear 75 onto the tail rotor shaft
28, observing the dimensions stated in the illustration.
4.2 Completing the tail rotor housing
Figs. TR-02 & -03
Place the 11 Ø x 5 Ø x 4 mm ballrace 117 in the right-hand
side of the tail rotor housing 81. Locate the tail rotor shaft with
the bevel gear, and push it into the appropriate recess from the
left-hand side, passing it through the ballrace you have just
fitted. Fit the 13 Ø x 7 Ø x 4 mm ballrace 116 from the lefthand side.
4.3 Assembling the tail rotor
Figs. TR-04, -05 & -06
Place the tail rotor hub 84between the integral blade holders
of the two tail rotor blades 80, together with the 6 Ø x 3 Ø x 0.3
mm washers 106. Ensure that the tail rotor blades are fitted
the right way round: viewed from the left, the tail rotor rotates
clockwise.
Fit the two M3 x 16 mm grubscrews 109 to connect these
parts.
The next step is to install the control yoke 83. Both ends of
the yoke fit in the integral blade holders of the tail rotor blades,
and are secured by the 1.5 Ø x 20 mm dowel pins 111.
Fig. TR-07
Slide the prepared tail rotor assembly onto the tail rotor shaft;
the tail rotor hub should be a firm fit in the left-hand ballrace
35
Page 36

116.The grubscrews 109 can now be tightened fully; this action
fixes the tail rotor reliably and securely to the shaft.
4.4 Securing the tail rotor shaft
Fig. TR-08
Slide the collet bush 26 onto the tail rotor shaft from the righthand side; there should be no perceptible axial play in the
assembly. When you are confident of this, apply a drop of
thread-lock fluid to the two M3 x 4 grubscrews 107 and tighten
them to secure the collet bush.
4.5 Installing the tail rotor control system
Fig. TR-09
First insert the control yoke bush 27 through the central hole
in the control yoke from the inside, pushing it in as far as it will
go. Now fit the control yoke collet 24 from the other side, and
secure it with the M3 x 3 mm grubscrew 107; this screw should
also be secured with a drop of thread-lock fluid. Ensure that
the control yoke is able to rotate with as little friction as
possible. Now slide the tail rotor pushrod 37 through the tail
rotor shaft from the right-hand side. Grease the pushrod, so
that the system works as smoothly and easily as possible.
4.6 Attaching the tail rotor bellcrank
Fig. TR-10
The tail rotor bellcrank 82 is fitted using the M2 x 10 mm
screw 96 and the associated 5 Ø x 2.2 Ø x 0.3 mm washer
104. Insert the pre-formed part of the tail rotor pushrod in the
hole in the shorter arm of the bellcrank. Once again, please
ensure that the crank swivels as smoothly and freely as
possible, with the absolute minimum of lost motion.
4.7 Tail rotor guard
Fig. TR-11
Push the wire tail skid 39 into the channels in the tail rotor
housing 81, and secure it with a little cyano.
4.8 Checking the tail rotor assembly
of tubing (not included in the kit) , according to the dimensions
in the picture, and use it to push the bushes along the boom
until the “pushing tube” is flush with the ends of the tail boom.
The next step is to insert the end bushes 68 into both ends of
the tail boom.
Fig. TB-03
Attach the front tail rotor shaft bevel gear 73 at the end of the
boom which features a hole located 41 mm from the cut end.
The hole at the rear is only 20.5 mm from the end, and this is
where the rear tail rotor shaft bevel gear 74 should be fitted.
Remember to install the washers 118 between the tail rotor
bevel gears and the end bushes. Apply a drop of thread-lock
fluid to the grubscrews 110 in the bevel gears, and tighten
them firmly onto the tail rotor shaft. Check that the system
moves smoothly and freely, and that there is barely perceptible
axial play in the shaft.
Fig. TB-04 & -05
6 Final assembly
6.1 Preparing the main bevel gear
The hexagon insert 25 can now be pressed into the main bevel
gear72: ensure that the threaded holes line up with the throughholes for the two 4 x 6 mm grubscrews 108, and fit the screws
at the same time.
Fig. AS-01
6.2 Main rotor shaft - installation
Prepare two collet bushes 26 by screwing two M3 x 3 mm
grubscrews107 into each one.
Fig. AS-02
Press the first collet bush 26 into the ballrace 117, with the
spigot at the bottom, and place this assembly in the semicircular recess in the centre of the mechanics.
Fig. AS-03
Fig. TR-12
Now that the mechanical assembly of the tail rotor is complete,
it is time to check that all the parts are correctly fitted, referring
carefully to the illustrations: ensure that all the components
are set at the correct angle relative to each other, that the
direction of rotation of the tail rotor is correct, and that the
system operates freely and smoothly. You can check the
operation of the system by moving the bellcrank by its long
arm, i.e. the arm to which the tail rotor pushrod will eventually
be connected.
5 Completing the tail boom
5.1 Preparing the tail rotor shaft bevel gears
Fig. TB-01
Push the bevel gear hexagon inserts 23 into the two tail rotor
shaft bevel gears (front 73, rear 74), taking care to align the
holes correctly when fitting the parts together. Fit the M4 x 4
mm grubscrews 110 from both sides, but do not tighten them
for the moment.
5.2 Preparing the tail boom
Fig. TB-02
Slide the central bushes 67 onto the tail rotor shaft 34, and
slide each into the tailboom 29, corresponding to the picture.
The best method of accomplishing this is to cut a scrap piece
Push the spigot of the second collet bush 26 through the upper
ballrace from the underside, and place the main bevel gear on
the collet in the centre of the mechanics. Slide the rotor head
down to the point where the main rotor shaft is visible at the
underside of the motor.
Fig. AS-04
Connect the rotor head ball-links to the upper swashplate as
shown.
Fig. AS-05
Now apply thread-lock fluid to the M3 x 3 mm grubscrews in
the collets and the motor shaft support, and tighten the screws;
the grubscrews in the main bevel gear are tightened later.
Fig. AS-06
6.3 Attaching the tail boom
Insert the tail boom in the rear socket in the chassis, and
bring the teeth of the tail rotor drive bevel gear into engagement
with the main bevel gear .
Fig. AS-07
The tail boom is prevented from shifting in the axial direction
by the M2 x 6 screw 95, which should be fitted from the righthand side as shown.
Fig. AS-08
36
Page 37

Secure the tail boom clamp 71 using four M2.5 x 16 screws
98 and one M2.5 x 12 screw 97. Tighten the screws to clamp
the tail boom in position.
rotor housing only; they should not be attached to the rear
fuselage itself.
Fig. AS-16
The meshing clearance between the main bevel gear and the
tail rotor drive bevel gear can be adjusted by altering the vertical
position of the main bevel gear. It is very important that the
gears rotate smoothly .
Tip: to set the correct meshing clearance, draw a strip of blotting
paper between the teeth of the bevel gears. Press the gears
together, tighten the grubscrews in the main bevel gear , then
wind the paper out again by turning the gears manually . Use
thread-lock fluid to secure these grubscrews.
Fig. AS-09
6.4 Attaching the tail rotor
Slide the front tail rotor bracket 66 and the rear tail rotor bracket
65 onto the tail boom with the small holes facing down.
Insert the rear end of the prepared tail boom in the tail rotor
housing. The hole in the boom (located 20.5 mm from the end
of the tube) must line up accurately with the corresponding
hole in the tail rotor housing. Fit the M2 x 10 screw 96 to
clamp the tail rotor housing to the tail boom. Finally fit the M2
x 6 screw 95 to ensure that the boom cannot shift in the axial
direction.
Fig. AS-10
The tail rotor linkage is completed by installing the tail rotor
pushrod 33 in order to connect the bellcrank to the tail rotor
servo. Slip the pushrod through the two tail rotor brackets from
the rear. Finally slip the pushrod through the articulated barrel
fitted to the tail rotor servo output lever , but don’t tighten the
clamping screw in the barrel at this stage. The pre-formed end
of the pushrod should first be connected to the bellcrank from
above. Position the tail rotor in its neutral position, then adjust
the tail rotor servo in such a way that the servo output lever is
inclined 10° to the left when the servo is at neutral, when you
view the helicopter from the left-hand side. Now apply threadlock fluid to the grubscrew in the articulated barrel, and tighten
it firmly.
Fig.AS-11
Press the rear fuselage shells against the tail supports on the
tail boom.
Fig. AS-17
Slide the joined front fuselage section onto the integral chassis
rails. To remove the front fuselage section again, press the
canopy latch on the underside, then withdraw it forward.
Fig. AS-18
9 Centre of Gravity
For comfortable hovering the Centre of Gravity should be located
on the axis of the main rotor shaft, whereas a slightly noseheavy balance point is recommended if you wish to fly circuits.
The CG position can be adjusted by re-positioning the flight
battery.
Fig. CG (see Quick Start)
7 Main rotor blades
Attach the main rotor blades 50 to the blade holders using the
four M3 x 16 mm grubscrews 109.
Fig. AS-12
8 Fuselage assembly
Glue together the front fuselage shells 41L and 41R, at the
same time gluing the canopy latch 90 in the appropriate
recesses. The glazing panels (86, 87, 88, 89) can also be
glued to the fuselage nose at the same time.
Fig. AS-13
Glue the fuselage locating pieces 43L and 43R to the inside of
the rear fuselage shells 42L and 42R. Glue the horizontal
stabiliser panels 44L and 44R in place.
Fig. AS-14
Y ou will find a moulded-in brace below the opening for the tail
rotor housing in the left-hand fuselage shell; this can now be
removed using a sharp balsa knife.
Fig. AS-15
The vertical stabiliser shells 45L and 45R are glued to the tail
37
Page 38

In breve
Prima di mettere in funzione il modello, leggere assolutamente le avvertenze.
In base alla versione del Suo FunCopter, si dovranno eventualmente ancora installare i componenti elettronici.
Componenti RC MUL TIPLEX per il FunCopter:
AK = Assembled Kit - RR = Ready for Radio
Per la versione AK:
ServoTiny S necessari 3 pz. (rollio, beccheggio, anticoppia) Art.nr. 6 5121
oppure
Servo Tiny MG necessari 3 pz. (rollio, beccheggio, anticoppia) Art.nr. 6 5122
GiroscopioMULTIgyro 300DP Art.nr. 7 5503
RegolatoreMULTIcont BL-37/II Art.nr . 7 2276
Per le versioni AKe RR:
RiceventeRX-6-SYNTH light 35 MHz banda A/B Art.nr. 5 5876
in alternativa 40/41 MHz Art.nr. 5 5877
I
oppure
RiceventeRX-7-DR light M-Link 2,4 GHz Art.nr. 8 5810
(solo assieme ad una radio 2,4 GHz MUL TIPLEX)
Pacco batteria consigliato:
Li-BA TT FX 3/1-3200 Art.nr. 15 7371
Li-BATT BX 3/1-3200 Art.nr. 15 7136
Li-BA TT eco 3/1-3000 Art.nr. 15 7236
Caricabatterie:
MUL TIcharger LN-3008 EQU Art.nr. 9 2540
per pacchi batteria LiPo, Lilo e LiFe con 2 fino a 3 elementi in serie e per pacchi batteria NiMH e NiCd con 4 fino a 8
elementi.
Attrezzi:
Chiave a brugola SW 1,5 – 2 – 2,5 – 3 – 4 mm (allegate)
Tronchesino, cacciavite a croce, cacciavite a taglio (per regolazione giroscopio), pinza per uniball (consigliata).
Per l’installazione dei componenti elettronici consulta la fig. AS. L’installazione dei servi è descritta in modo dett agliato nelle
istruzioni di montaggio.
Il giroscopio deve essere installato nella giusta posizione – vedi a tale proposito le istruzioni allegate. Fissare il giroscopio con
nastro biadesivo, che assorba le vibrazioni; la ricevente, il regolatore ed il pacco batteria con il velcro. Posizionare i cavi lontano
da parti in movimento.
In fase d’installazione del pacco batteria, tenere conto del baricentro (vedi Fig. CG). Per il volo stazionario, il baricentro si trova
esattamente sotto al rotore principale. Per il volo veloce, si consiglia di installare il pacco batteria più in avanti.
I rinvii di comando installati di serie sul rotore principale si sono dimostrati adatti all’impiego. Per una regolazione ancora più
precisa, questi possono essere sostituiti con i rinvii regolabili allegati. Con questi rinvii, le pale possono essere allineate ancora
più precisamente, con conseguente riduzione delle vibrazioni. Sostituire il rinvio di miscelazione 35 ed il giunto sferico 55 con
il rinvio 13 e giunto 14 allegati. L’installazione deve avvenire come indicato nelle Fig. MR-05 & Fig. MR-06 riportate sulle
istruzioni di montaggio. Durante l’installazione, regolare correttamente la lunghezza dei rinvii, in modo da evitare la tensione dei
rinvii. Per correggere l’allineamento, svitare il rinvio su una parte ed avvitarlo sull’altra parte con lo stesso numero di giri. In
questo modo si inclina il bilancere con conseguente inclinazione delle pale. Se si nota un peggioramento, intervenire nuovamente
sulla regolazione per inclinare il bilancere dalla parte opposta.
38
Page 39

Servo
Pacco batteria
Gyroscopi
Servo
Ricevente
Regolatore
Abb.AS
Abb. CG
39
Page 40

FunCopter
Dati tecnici:
Diametro rotore: 708 mm
Lunghezza sopra tutto: 855 mm
Peso in ordine di volo ca. 1250 g
Avvertenze
- Per la riparazione del modello usare esclusivamente parti di
ricambio originali. Solo con l’impiego di parti di ricambio
originali è giustificata la richiesta di garanzia.
- Non impiegare il modello su strade pubbliche, parchi o parchi
giochi o altre aree urbane – per motivi di natura assicurativa,
volare esclusivamente su campi di volo. Per informazioni ed
indirizzi utili, chieda al Suo rivenditore.
Queste avvertenze devono essere conservate con cura,
assieme alle istruzioni di montaggio e d’uso, e devono essere
allegate al prodotto in caso di cessione. In caso di smarrimento
delle istruzioni, queste si possono anche scaricate dal nostro
sitowww.multiplex-rc.de.Elicotteri radioguidati non sono
adatti a ragazzi con un’età inferiore a 16 anni. L’impiego
di un tale modello è consentito a ragazzi, solo sotto il controllo
e la giuda da parte di un adulto, che dispone delle necessarie
conoscenze specifiche e che è consapevole dei possibili rischi.
Un elicottero radioguidato non è un giocattolo in senso stretto.
La necessaria abilità deve essere appresa. Per aiuto ci si può
rivolgere alle diverse associazioni modellistiche, a modellisti
esperti o a scuole di volo radioguidato. Un allenamento mirato
con un simulatore di volo è consigliato. Indirizzi utili si possono
anche richiedere p.es. alla Federazione Italiana Aero
Modellismo (www.fiamaero.it).
La manutenzione e l’impiego di elicotteri radioguidati richiedono
conoscenza tecnica, accuratezza nella costruzione, nonché
disciplina e consapevolezza dei rischi. Errori ed imprecisioni
in fase di manutenzione e funzionamento possono provocare
danni a persone e cose. Richiamiamo espressamente
l’attenzione su questi pericoli, poiché non possiamo controllare
la corretta manutenzione e l’impiego del modello. Tutte le
avvertenze, anche quelle riportate su altre istruzioni, devono
essere assolutamente rispettate. L ’inosservanza può provocare
danni gravi, anche mortali.
Attenzione:
- Prima di mettere in funzione il modello, controllare il fissaggio
delle pale e di tutte le parti rilevanti per la sicurezza,
specialmente prima del primo volo, dopo il trasporto, atterraggi
duri o quando il modello è precipitato. Prima del decollo
controllare che l’impianto radio e l’alimentazione funzionino
correttamente.
- Non entrare nell’area di rotazione dei rotori. In questo caso il
pericolo è molto elevato, con possibile amputazione degli
arti.
- Solo Lei è responsabile per le possibili conseguenze dovute
all’impiego del modello – in ogni caso è indispensabile una
copertura assicurativa adeguata (una normale polizza che
copre i danni verso terzi, spesso non è sufficiente)
Prenda confidenza con il modello!
Le scatole di montaggio MUL TIPLEX sono soggette, durante
la produzione, ad un continuo controllo della qualità e siamo
pertanto certi che Lei sarà soddisfatto con il contenuto della
scatola di montaggio. La preghiamo tuttavia, di controllare tutte
le parti prima del loro utilizzo (consultando la lista materiale),
poiché le parti già lavorate non potranno più essere
sostituite. Se una parte dovesse essere difettosa, saremo
disposti, dopo un nostro controllo, alla riparazione o alla
sostituzione. In questo caso, inviare la parte in questione al
nostro reparto modellismo, allegando assolutamente lo
scontrino fiscale e il modulo di reclamo allegato, compilato
in ogni sua parte.
Noi lavoriamo costantemente al miglioramento tecnico dei nostri
prodotti. Cambiamenti nel contenuto della scatola di montaggio,
in forma, dimensioni, tecnica, materiali ed accessori, sono
possibili in ogni momento e senza preavviso. Per tutto quanto
qui descritto, per i disegni e le foto, non si assumono
responsabilità.
Questo modello, come ogni altro aereo, ha dei limiti
strutturali! Sollecitazioni estreme e manovre assurde
possono causare il cedimento strutturale. Nota: in questo
caso il modello non è coperto da garanzia. In volo,
avvicinarsi con cautela alla sollecitazione massima
possibile.
Armonizzazione meccanica:
Il FunCopter è regolato in modo ottimale per principianti. Se
volete rendere il modello più agile, sussiste la possibilità di
appendere i rinvii nei fori esterni delle squadrette del servo
(Attenzione! Forze grandi si ripercuotono sui servi! Nel caso
il rotore entrasse in contatto con il terreno sussiste il pericolo
che i servi vengano danneggiati.), e di spostare all’esterno i
tondini a Z (32) alla testa del rotore.
1. Messa in funzione
Prima della messa in funzione, controlli il contenuto del Suo
set.
Nota:Alla consegna il modello è premontato. Ciononostante
solo Lei è responsabile per il montaggio finale e per
l’impiego del modello. Prima di mettere in funzione il
modello, controllare ogni vite e tutte le regolazioni, in particolare
le regolazioni dei servi ed il senso di rotazione.
- Prima di mettere in funzione il modello, avvertire gli spettatori
sui possibili rischi e chiedere che si portino ad una distanza
adeguata.
- Se il modello è danneggiato, effettuare tutte le necessarie
riparazioni, prima di un nuovo impiego.
- In nessun caso sorvolare persone e animali o volare nella
loro direzione.
40
2. Terminare il modello
In base alla versione, si dovranno effettuare oltre al controllo,
ancora altri lavori.
AK (Assembled Kit) = qui si devono ancora installare tutti i
componenti RC.
I componenti consigliati si adattano perfettamente al modello
e tutto combacia alla perfezione.
L’inst allazione di altri componenti solo a propria discrezione e
rischio.
Page 41

RR(Ready for Radio) = qui si deve ancora installare la ricevente.
Fissare i cavi con le fascette allegate e accertarsi che non
entrino in contatto con il riduttore o con i rinvii.
Il modello è predisposto per pacchi batteria LiPo 3S – 1 1,1 V
(corrente continua almeno 35A). Impiegare preferibilmente i
pacchi batteria da noi consigliati. Questi hanno un ottimo
rapporto prezzo/prestazioni e si adattano perfettamente al
sistema. Se ciononostante, si opta per l’impiego di altri pacchi
batteria, accertarsi assolutamente che il bilanciamento sia
corretto.
In modalità Headinglock il servo dell’anticoppia tende a
restare alla massima escursione. Non si faccia irritare.
Controllare il valore trim del servo anticoppia (per radio
computerizzate: accertarsi che nessuna miscelazione
intervenga sul servo anticoppia - per il FunCopter è sufficiente
un programma standard per aerei).
Con grandi differenze di temperatura, consigliamo l’accensione
prima del volo del giroscopio e della ricevente per ca. 5 minuti.
S pegnere e riaccendere nuovamente il giroscopio e la ricevente
– adesso il FunCopter è pronto per l’uso.
Prima della messa in funzione del modello, il pacco batteria
deve essere sempre caricato completamente con un
caricabatterie adeguato.
3. Controllo delle funzioni e impostazioni
Per comandare il modello è sufficiente una semplice radio a 4
canali, priva di qualsiasi mixer . Collegare l’impianto RC come
indicato dal produttore.
Per la regolazione, smontare per sicurezza le pale
principali e tenere il modello al supporto per il pacco
batteria! Assicurarsi che il motore non parta, collegando
il pacco batteria!
Se, con le pale principali smontate, si vuole testare la
funzione del rotore di coda accendendo il motore, usare
sempre un numero di giri particolarmente ridotto. In
condizioni normali, il rotore principale rallenta il sistema.
Con rotore principale non ancora installato, il rotore
anticoppia può raggiungere un numero di giri talmente
elevato, da superare il limite di sollecitazione! Un numero
di giri troppo elevato può avere come conseguenza
danni e ferimenti!
Con tutti i trim in posizione “neutrale”, le squadrette dei servi
devono trovarsi nella posizione centrale prevista ed il piatto
ciclico in orizzontale. In caso contrario, correggere intervenendo
sui raccordi dei rinvii.
Dando “rollio a destra”, il piatto ciclico si deve inclinare verso
destra; con “rollio a sinistra” il piatto ciclico si deve inclinare a
sinistra.
Avvertenze sulla manutenzione:
tra le ruote coniche (davanti: 72, 73 / dietro: 74, 75) e i supporti
finali del tubo di coda si trovano due rondelle. Queste devono
essere lubrificate ad intervalli regolari con una goccia di olio al
silicone. Lo stesso vale per le ruote dentate con un po’ di
grasso per trasmissioni. Fare attenzione che i prodotti utilizzati
siano adatti alla plastica.
Impostare l’anticoppia in modo da avere a disposizione l’intera
escursione. Se dovesse essere necessario ridurre la corsa,
con radiocomandi computerizzati si possono usare le funzioni
“Dual Rate” o “riduzione della corsa”. Se questa possibilità
non esiste, spostare il raccordo cardanico, installato sulla
squadretta del servo, verso l’interno.
Il giroscopio impiegato deve essere usato in modalità
Headinglock (leggere anche le istruzioni allegate al
giroscopio!).
Se si dà la massima escursione in una direzione, la modalità
standard fa ritornare velocemente il servo in posizione neutrale
appena lo stick viene rilasciato.
Il senso d’intervento può essere impostato con l’interruttore
REVERSE <—>:
Controllare il senso d’intervento del giroscopio muovendo a
scatti l’elicottero intorno all’asse verticale. Se il giroscopio
dovesse intervenire in senso contrario, agire sull’interruttore
REVERSE <—> con un piccolo cacciavite. L’interruttore si
trova sul lato destro del giroscopio.
Prima di spostare l’interruttore, spegnere assolutamente
l’impianto RC!
Nota
Per altre informazioni riguardanti il giroscopio, consulta le
istruzioni allegate.
4. Controllo finale
a. Il rotore anticoppia si deve muovere con facilità.
b. Installare nuovamente le pale principali. Le pale si devono
muovere facilmente verso l’alto / il basso e restare agganciate
in posizione di lavoro.
c. I perni devono essere tesi e serrati in modo uniforme, per
evitare la chiusura in avanti / all’indietro dovuta alla forza di
gravità.
d. Tutte le connessioni elettriche devono avere un contatto
perfetto al 100%. Tutte le spine devono essere inserite
completamente, i cavi fissati con fascette.
e. La capottina deve essere agganciata.
f. Controllare il baricentro. Alzare l’elicottero tenendolo con
due dita sul rotore ausiliario. L’elicottero è bilanciato
perfettamente, se il tubo di coda si porta in posizione
orizzontale. Normalmente le correzioni sono possibili spostando
il pacco batteria, altrimenti usare del della zavorra.
g. Dopo 5 – 10 ore di funzionamento, controllare le rondelle
118 e sostituirle in caso di usura.
5. Test di ricezione
Per il test di ricezione, smontare assolutamente le pale dai
portapale – con questo accorgimento, con avvio improvviso
del motore dovuto ad interferenze, il pericolo di danneggiare
qualcosa o di ferimento è minimo. Per il test di ricezione, si
consiglia di posizionare il modello su un tavolo – con il modello
per terra il risultato del test non è attendibile.
In ogni caso effettuare il test di recezione con motore in moto
e anche fermo. In nessun caso fissare l’elicottero per terra,
questo può generare delle risonanze che possono danneggiare
l’intero modello. Chieda ad un aiutante di restare con il modello;
mentre si allontana con la radio, l’aiutante tiene sotto controllo
il movimento dei servi e comunica se questi cominciano a
muoversi in modo incontrollato. Effettuare il test di ricezione
come riportato sulle istruzioni d’uso allegate alla radio.
6. Primo volo
Per il primo volo, scegliere una giornata possibilmente priva di
vento. Mettere in funzione il modello su un campo di volo
autorizzato – in primo luogo, per motivi di natura assicurativa.
41
Page 42

Qui il principiante potrà inoltre trovare un valido aiuto da parte
di modellisti esperti.
Per il principiante, si consiglia l’installazione di un telaio per
evitare il rovesciamento del modello. Posizionare il modello a
ca. 5 metri davanti a se, in controvento. L’erba corta o una
pista battuta sono particolarmente vantaggiosi – i pattini non
restano impigliati ed il rotore di coda può ruotare liberamente.
Dopo un ultimo controllo di tutte le funzioni, dare lentamente
motore, fino ad “alleggerire” il modello – controllare
attentamente tutte le funzioni ed i relativi trim.
Durante i primi tentativi non alzare il modello per più di 1 – 1,5
metri – non scivolare per terra. Non volare a più di 10-20 metri
di distanza. Per motivi di sicurezza non avvicinare il modello a
meno di 5 metri di distanza. Nel caso il modello si dovesse
trovare in una situazione critica, atterrare. Non intervenire sul
gas con indugio, ma neanche in modo frenetico. Spesso è più
sicuro fermare immediatamente il motore, se l’impatto del
modello è inevitabile. In questo modo, il modello “sopravvive”
di regola con i danni minori.
7. Dopo il volo stazionario
Quando si riesce a tenere abbastanza bene l’elicottero in volo
stazionario, cambiare la propria posizione. Posizionarsi
lateralmente, accanto all’elicottero, sempre a ca. 5 metri.
Decollare, e mantenere l’elicottero in volo stazionario.Adesso
si può tentare di avanzare lentamente. Rispetto al pilota,
l’elicottero deve mantenere sempre la stessa posizione.
Mantenere la distanza e l’altezza e girarsi assieme all’elicottero
che avanza. Se il primo cerchio non riesce già la prima volta,
questo non è un problema. Atterrare e tent are di nuovo. Con il
FunCopter è importante sapere che in discesa ha la tendenza
ad impennarsi – quindi tenersi pronti per correggere
leggermente in avanti. Se l’impennaggio dovesse essere troppo
accentuato, ridurre il rateo di discesa.
Durante la discesa fare attenzione a non spegnere mai
completamente il motore. Se il numero di giri viene ridotto
troppo, può accadere che l’aria chiuda verso l’alto le pale
principali, senza possibilità di correzione.
8. Volare degli otto piatti
Il prossimo ostacolo è quello di volare l’elicottero “verso di se”.
Per facilitare la manovra, praticare davanti alla propria posizione
degli 8, sempre in controvento. Noterà subito che questo è
molto più difficile, che il volo intorno al pilota. V olare dapprima
semplicemente da sinistra a destra, poi tentare degli 8 piatti.
Con un po’ d’allenamento i cerchi dell’8 diventeranno sempre
più grandi e rotondi.
9. Atterraggi (d’emergenza)
Gli atterraggi dal volo stazionario sono i più semplici; ridurre
lentamente il gas e attendere la reazione – se l’elicottero
comincia a scendere troppo in fretta, contrastare con un po’ di
motore. Tutto deve avvenire con calma.
Con volo in avanti, ridurre il gas e fermare l’avanzamento con il
beccheggio (indietro). Durante il passaggio al volo stazionario,
dare di nuovo lentamente gas – poi procedere come per
l’atterraggio dal volo stazionario descritto spora.
Se l’impatto del modello è inevitabile, spesso è più sicuro
fermare immediatamente il motore. In questo modo, la
probabilità di “sopravvivenza” del modello è maggiore, rispetto
all’impatto con rotore in movimento e sotto carico.
l’intera meccanica gira con un numero di giri sempre variabile.
Durante la discesa, la rotazione del rotore principale si può
ridurre in modo da toccare l’area di risonanza del modello, con
conseguenti vibrazioni. Nessuna paura! È sufficiente aumentare
il numero di giri, fino far “calmare” il FunCopter - questo avviene
relativamente in fretta.
In fase di avvio del motore è comunque normale che l’elicottero
vibri brevemente – qui il modello entra nella sua risonanza di
terra, che termina subito, aumentando rapidamente il numero
di giri.
Se in conseguenza di un atterraggio più duro o dopo danni
dovuti al trasporto, si notano delle vibrazioni durante l’intero
volo, qualche cosa non funziona correttamente. Controllare
che l’albero del rotore principale e quello dell’anticoppia non
siano piegati – smontare gli alberi e farli rotolare su un tavolo
piano. Con una deformazione anche minima, gli alberi devono
essere sostituiti.
Anche con delle vibrazioni è possibile far volare il modello; le
vibrazioni possono però compromettere il funzionamento dei
componenti elettronici, che col tempo di possono guastare.
Se il modello dovesse vibrare, anche se precedentemente non
è precipitato, potrebbe essere necessario bilanciare le pale
principali.Applicare in prossimità del baricentro della pala (sulla
parte esterna del turbolatore applicato sopra la pala) tanto
nastro adesivo necessario da bilanciare le pale al decimo di
grammo.
11. Sicurezza
La sicurezza è molto importante quando si vola con modelli
radioguidati. Stipulare assolut amente un’assicurazione. Per i
membri di club questa viene stipulata normalmente
dall’associazione stessa per tutti gli associati. Fare attenzione
che la copertura assicurativa sia sufficiente (aeromodello con
motore).
Tenere i modelli ed il radiocomando sempre in perfetta
efficienza. Informarsi su come caricare correttamente le
batterie. Fare uso di prodotti che migliorano la sicurezza. Nel
nostro catalogo generale MUL TIPLEX si possono trovare tutti i
prodotti più adatti, sviluppati da modellisti esperti.
Volare sempre in modo responsabile! Volare a bassa quota,
sopra la testa degli altri non significa essere degli esperti, i
veri esperti non ne hanno bisogno. Nell’interesse di tutti noi si
faccia presente questo fatto anche agli altri modellisti. Volare
sempre in modo tale da non mettere in pericolo i colleghi
modellisti e gli spettatori. Si prenda in considerazione che
anche il migliore radiocomando può essere soggetto, in ogni
momento, ad interferenze esterne. Anche anni d’esperienza,
senza incidenti, non sono una garanzia per il prossimo minuto
di volo.
12. Trasporto
Per facilitare il trasporto del FunCopter usare il fermapale
allegato.
Inserire le pale rivolte all’indietro, nelle due scanalature del
fermapale; agganciarlo infine alla coda dell’elicottero. In questo
modo il FunCopter può essere trasportato in modo sicuro e
compatto.
10. Vibrazioni
La salita/la discesa del FunCopter vengono comandate con
l’aumento/la riduzione del numero di giri. Per questo motivo,
42
Page 43

Noi, il Suo team MULTIPLEX , Le auguriamo tanta
soddisfazione e successo nella costruzione e più tardi nel far
volare questo straordinario modello.
Con le rappresentazioni grafiche, lo smontaggio e il
rimontaggio delle diverse unità non dovrebbe essere un
problema.
MULTIPLEX Modellsport GmbH & Co. KG
Assistenza e sviluppo aeromodelli
Klaus Michler
Informazioni generali riguardanti la riparazione:
Il modello è molto robusto – se ciononostante dovesse
essere necessaria la sostituzione di una parte, di seguito
sono riportate le foto suddivise in 5 unità d’assemblaggio:
1. Chassis con carrello
2. Rotore principale
3. Rotore di coda
4. Tubo di coda
5. Fusoliera
Le seguenti parti di ricambio sono disponibili:
Parti di ricambio
Pale rotore di coda (1coppia) # 22 3001
Albero principale # 22 3002
Supporti pale 5° # 22 3003
Set ingranaggi # 22 3004
Set rinvii # 22 3005
Set leverismi rotore principale # 22 3006
Set piatto ciclico # 22 3007
Set leve beccheggio # 22 3008
Set squadretta servo # 22 3009
Set rotore principale # 22 3010
Set rotore ausiliario # 22 3011
Albero rotore di coda # 22 3012
Set tubo di coda # 22 3013
Set rinvio rotore di coda # 22 3014
Set cassa rotore di coda # 22 3015
Set Chassis # 22 3016
Supporto pattini (1 coppia) # 22 3017
Set carrello # 22 3018
Decals # 22 3019
Fusoliera anteriore + vetratura # 22 3020
Fusoliera posteriore + piani di coda # 22 3021
Pale principali (1 coppia) # 22 3022
Raccordo (1 coppia) # 23 3023
Fermapale # 23 3024
Rondella Ø7xØ2x0,3mm (10 pz.) # 23 3025
Mozzo rotore principale singolo # 22 3026
Cassa rotore di coda con pezzi in polistirolo # 22 3027
Motore brushless (Himax C 6310-0225) # 33 3070
Consigli per la regolazione del trasmettitore:
se utilizzate un trasmettitore programmabile, vi consigliamo le seguenti regolazioni:
per il FunCopter si può utilizzare un semplice programma per modelli per evitare dei miscugli involontari che si ripercuotono
sulla coda. Non è necessario un programma per elicotteri.
Nel caso di “Beccheggio“ (“timone di quota) e “Rollio“ (“alettoni“) si possono mischiare a piacere Expo o Dual Rate o riduzione
della corsa, a seconda della sensibilità di reazione desiderata per il vostro FunCopter. Per la funzione del rotore di coda si
devono utilizzare solo Dual-Rate o riduzione della corsa, per adattare la coda alle vostre esigenze.
Piacevole è anche la programmazione di due fasi di volo: la prima per il volo a punto fisso in cui il FunCopter è stabilizzato in
modo che voli su un punto fisso. La seconda fase di volo deve essere memorizzata con un valore di trim piccolo in avanti su
“beccheggio“. In questo modo il modello tende sempre a volare in avanti rendendo il volo stazionario più comodo.
Consigliamo i seguenti valori per impianti MULTIPLEX:
Funzione Fase di volo “su punto fisso” Fase di volo “volo stazionario“
Beccheggio (timone di quota) Expo: 30 %, percorso: 70 % percorso: 100 %, trim ca. 5% in avanti /
profondo
Rollio (alettoni) Expo: 30 %, percorso: 70 % percorso: 100 %
Coda (lato) percorso: 60 % percorso: 60 %
43
Page 44

Lista materiale FunCopter
AK RR
Pos. Pz. Pz. Descrizione Materiale Dimensioni Contenuto nel set ricambio
1 1 1 Istruzioni modello carta
2 1 1 Istruzioni motore carta
3 0 1 Istruzioni regolatore carta
4 0 1 Istruzioni giroscopio carta
8 1 1 Chiave a brugola metall o SW 1,5 mm
9 1 1 Chiave a brugola metallo SW 2 mm
10 1 1 Chiave a brugola metallo SW 2,5 mm
1 1 1 1 Chiave a brugola metallo SW 3 mm
12 1 1 Chiave a brugola metallo SW 4 mm
13 2 2 Rinvii di regolazione metal lo M2x12 Ø1,8 x 12 x 42,5mm # 223023 (2x)
14 2 2 Giunto sferico da avvitare materiale plastico finito # 223023 (2x)
15 3 0 Velcro parte uncinata materiale plastico 25 x 60 mm # 683112 (5x)
1 6 3 0 Velcro p arte stoffa materiale plastico 25 x 60 mm # 683112 (5x)
17 4 0 Fascette materiale plastico 98 x 2,5mm
18 6 0 Vite fissaggio servi meta ll o 2,2 x 13 mm # 682652 (50x)
20 3 3 Perno cardanico Ø6mm # 223009 (1x)
21 2 2 Fermaglio metallico punzonato 1,5mm # 223016 (2x)
22 8 8 Fascette materiale plastico 142 x 2,5mm # 223017 (4x)
23 2 2 Boccola met al lo SW5,9 x Ø1,9 x 10,5 # 223004 (2x)
24 1 1 Collare ponte comando met al lo Ø8 x Ø3,2 x 5mm # 223014 (1x)
25 1 1 Boccola esagonale ingr. pricip. me ta ll o SW1 1,9 x Ø4,05 x 16mm # 223004 (1x)
26 3 3 Collare di supporto met al lo Ø1 1 x Ø4,95 x Ø4,05 x 9,1mm # 223002 (1x)
27 1 1 Boccola supporto ponte comando m et al lo Ø6 x Ø3 x Ø1,9 x 10mm # 223014 (1x)
28 1 1 Albero rotore di coda m et al lo Ø4 x SW4 x Ø1,9 x 51mm # 223012 (1x)
29 1 1 Tubo di coda meta ll o SW12 x 0,4 x 450mm # 223013 (1x)
30 2 2 Tondino carrello acciaio armonico Ø1,8 x 160 x 49mm # 223018 (2x)
31 1 1 Albero principale acciaio indurito Ø4 x 200mm # 223002 (1x)
32 2 2 Rotore principale tondino a “Z” acciaio armonico Ø1,8 x 16 x 19mm # 223005 (2x)
33 1 1 Rinvio rotore di coda acciaio armonico Ø1,8 x 537mm # 223013 (1x)
34 1 1 Trasmissione di coda acciaio armonico Ø1,5 x 478mm # 223013 (1x)
35 2 2 Rinvii di miscelazione acciaio armonico Ø1,8 x 45 x 14mm # 223005 (2x)
36 1 1 Rinvio beccheggio acciaio armonico Ø1,8 x 75mm # 223005 (1x)
37 1 1 Rinvio rotore di coda acciaio armonico Ø1,8 x 83 x17 mm # 223005 (1x)
38 1 1 Rinvio rollio acciaio armonico Ø1,8 x 90 mm # 223005 (1x)
39 1 1 Tondino deriva acciaio armonico Ø1,8mm # 223015 (1x)
40 1 1 Tondino stabilizzatore acciaio armonico Ø1,8 x 215 mm # 223011 (1x)
Attrezzi e perni di regolazione
Minuteria AK
Minuteria (installata)
# 223018 (8x)
# 223014 (2x)
# 223012 (1x)
# 223014 (1x)
# 223027 (1x)
41L 1 1 Fusoliera anteriore sinistra materiale espanso finito # 223020 (1x)
41 R 1 1 Fusoliera anteriore destra materiale espanso finito # 223020 (1x)
42L 1 1 Fusoliera posteriore sinistra materiale espanso finito # 223021 (1x)
42 R 1 1 Fusoliera posteriore destra materiale espanso finito # 223021 (1x)
43 L 1 1 Supporto fusoliera sinistro materiale espanso finito # 223021 (1x)
4 3 R 1 1 Supporto fusoliera destro materiale espanso finito # 223021 (1x)
44L 1 1 Piano di quota sinistro materiale espanso finito # 223021 (1x)
44 R 1 1 Piano di quota destro materiale espanso finito # 223021 (1x)
45 L 1 1 Deriva sin istra materiale espanso finito # 223021 (1x)
45 R 1 1 Deriva destra materiale espanso finito # 223021 (1x)
46 1 1 Supporto fissaggio materiale espanso finito # 223024 (1x)
49 1 1 Decals foglio adesivo finito # 223019 (1x)
50 2 2 Pala rotore principale materiale plastico finito # 223022 (2x)
51 1 1 Rotore ausiliario materiale plastico finito # 22301 1 (1x)
52 1 1 Bilanciere materiale plastico finito # 22301 1 (1x)
53 1 1 Piatto ciclico superiore materiale plastico finito # 223007 (1x)
54 1 1 Piatto ciclico inferiore materiale plastico finito # 223007 (1x)
55 4 4 Giunto sferico ad innesto materiale plastico finito # 223005 (4x)
56 1 1 Asta di comando materiale plastico finito # 223006 (1x)
57 1 1 Mozzo rotore principale materiale plastico finito # 223010 (1x)
59 2 2 Leva miscelazione materiale plastico finito # 223006 (2x)
60 1 1 Leva mobile materiale plastico finito #223006 (1x)
Rivestimento fusoliera + Decals (montato)
# 223027 (1x)
# 223027 (1x)
stampato
Materiale plastico stampato (installato)
# 223026 (1x)
# 223010 (1x)
44
Page 45

AK RR
Pos. Pz. Pz. Descrizione Materiale Dimensioni Contenuto nel set ricambio
61 1 1 Giunto mobile materiale plastico finito # 223006 (1x)
62 1 1 Bilanciere rotore principale materiale plastico finito # 223010 (1x)
63 1 1 Pattino sinistro materiale plastico finito # 223018 (1x)
64 1 1 Pattino destro materiale plastico finito # 223018 (1x)
65 1 1 Supporto di coda posteriore materiale plastico finito # 223013 (1x)
66 1 1 Supporto di coda anteriore materiale plastico finito # 223013 (1x)
67 3 3 Supporto centrale trasm. di coda materiale plastico finito # 223013 (2x)
68 2 2 Boccola esterna materiale plastico finito # 223013 (2x)
69 1 1 Bilancere sinistro beccheggio materiale plastico finito # 223008 (1x)
70 1 1 Bilancere destro beccheggio materiale plastico finito # 223008 (1x)
71 1 1 Supporto fissaggio tubo di coda materiale plastico finito # 223016 (1x)
72 1 1 Ingranaggio conico principale materiale plastico finito # 223004 (1x)
73 1 1 Ingr. conico anteriore trasm. di coda materiale plastico finito # 223004 (1x)
74 1 1 Ingr. conico posteriore trasm. di coda materiale plastico finito # 223004 (1x)
75 1 1 Ingranaggio conico rotore di coda materiale plastico finito # 223004 (1x)
76 3 3 SquadrettaTwin materiale plastico finito # 223009 (1x)
77 2 2 Leva beccheggio materiale plastico finito # 223008 (2x)
78 2 2 Supporto pattini materiale plastico finito # 223017 (2x)
79 1 1 Chassis materiale plastico finito # 223016 (1x)
80 2 2 Pala rotore di coda materiale plastico finito # 223001 (2x)
81 1 1 Cassa rotore di coda materiale plastico finito # 223015 (1x)
82 1 1 Squadretta rotore di coda materiale plastico finito # 223014 (1x)
83 1 1 Ponte di comando rotore di coda materiale plastico finito # 223014 (1x)
84 1 1 Mozzo centrale rotore di coda materiale plastico finito # 223014 (1x)
85 1 1 Unità di supporto materiale plastico finito # 223016 (1x)
86 1 1 Vetratura posteriore/sinistra materiale plastico finito # 223020 (1x)
87 1 1 Vetratura posteriore/destra materiale plastico finito # 223020 (1x)
88 1 1 Vetratura anteriore/sinistra materiale plastico finito # 223020 (1x)
89 1 1 Vetratura anteriore/destra materiale plastico finito # 223020 (1x)
90 1 1 Gancio capottina materiale plastico finito # 223020 (1x)
91 2 2 Supporto pale 5° => 5 punti materiale plastico finito # 223003 (2x)
# 223027 (1x)
95 8 8 Vite T/cilindrica a brugola met allo M2 x 6mm # 223007 (6x)
96 4 4 Vite T/cilindrica a brugola met allo M2 x 10mm # 223006 (2x)
97 5 5 Vite T/cilindrica a brugola met allo M2,5 x 12mm # 223016 (1x)
98 4 4 Vite T/cilindrica a brugola met allo M2,5 x 16mm # 223016 (4x)
99 3 3 Vite T/cilindrica a brugola met allo M3 x 12mm # 223010 (1x)
100 2 2 Vite T/cilindrica a brugola me tallo M3 x 20mm # 223003 (2x)
101 2 2 Vite T/cilindrica a brugola me tallo M4 x 8mm # 223016 (2x)
102 2 2 Vite T/cilindrica a brugola me tallo M5 x 35mm # 22301 1 (2x)
10 3 2 2 Vite svasata met allo M2,5 x 25mm # 223008 (2x)
104 3 3 Rondella metallo Ø2,2 mm (M2) # 223006 (2x)
105 1 1 Rondella metallo Ø3,2 mm (M3) # 223010 (1x)
106 2 2 Rondella materiale plastico Ø3,2 mm (M3) # 223001 (2x)
107 10 10 Grano metallo M3 x 3mm # 223002 (2x)
108 2 2 Grano metallo M4 x 6mm # 223004 (2x)
10 9 6 6 Astina filettata metallo M3 x 16mm # 223001 (2x)
1 10 4 4 Grano metallo M4 x 4mm # 223022 (2x)
1 1 1 4 4 Perno cilindrico indurito metallo Ø1,5mm x 20mm # 223001 (2x)
1 12 1 1 Perno cilindrico indurito metallo Ø2mm x 16mm # 223006 (1x)
1 13 1 1 Perno cilindrico indurito met
1 14 3 3 Dado autobloccante met allo M 3 # 223010 (1x)
1 15 1 1 Cuscinetto radiale metallo Ø21 x Ø15 x 4mm # 223007 (1x)
1 1 6 1 1 Cuscinetto a sfere met allo Ø13 x Ø7 x 4mm # 223015 (1x)
1 1 7 3 3 Cuscinetto a sfere met allo Ø11 x Ø5 x 4mm # 223015 (1x)
1 18 2 2 Rondella materiale plastico Ø7 x Ø2 x 0,3mm # 223004 (2x)
1 19 4 4 Dado autobloccante met allo M2,5 # 223016 (4x)
Viti e componenti di fissaggio (installati)
# 223015 (1x)
# 223016 (1x)
# 223014 (1x)
# 223015 (1x)
# 223016 (2x)
# 223014 (1x)
# 223009 (1x)
# 223014 (3x)
# 223010 (2x)
allo Ø3mm x 28mm # 223010 (1x)
# 223016 (2x)
# 223025 (10x)
120 1 1 Motore brushless Himax C 6310-0225 finito # 333070 (1x)
12 1 0 3 Servo senza squadretta/con viti Tiny-S finito # 65121 (1x)
122 0 1 Regolatore MULTIcont BL-37/II finito # 72276 (1x)
123 0 1 Giroscopio + 2 pads di montaggio MU L TIgyro 300DP finito # 75503 (1x)
15 0 3 Velcro parte uncinata materiale plastico 25 x 60 mm # 683112 (5x)
1 6 0 3 Velcro parte stof fa materiale plastico 25 x 60 mm # 683112 (5x)
17 0 4 Fascette materiale plastico 98 x 2,5mm
18 0 6 Vite fissaggio servi met allo 2,2 x 13 mm # 682652 (50x)
Componenti RC (installati)
45
Page 46

Nota importante
La fusoliera del modello è in EPP! Per l’incollaggio non usare
quindi colla vinilica, poliuretanica o epoxy . La colla più indicata
è la colla a caldo.
1. Prima dell’assemblaggio
Prima di cominciare ad assemblare il modello, controllare il
contenuto della scatola di montaggio, consultando le Fig. 1+2
e la lista materiale.
Durante l’assemblaggio del FunCopter si dovranno anche
installare dei giunti sferici. Se il movimento dovesse risultare
troppo difficile, con una pinza, schiacciare minimamente il
giunto sul bordo esterno.
2. Montaggio della meccanica
2.1 Montaggio dei pattini
Fig. CH-01
Inserire i due tondini 30 nei due pattini 63 e 64 e allineare le
parti.
Con una vite M4 x 8 mm 101 e frenafiletti, avvitare il fermaglio
21 sul lato destro dello chassis 79.
Fig. CH-09
2.5 Fissare i pattini allo chassis
Agganciare i pattini ai rispettivi supporti.
Fig. CH-10
Fissare i tondini ai supporti con l’ausilio di quattro fascette
142 x 2,5 mm 22.
Fig. CH-11
2.6 Installare l’unità di supporto
Inserire il cuscinetto a sfere Ø 11 x Ø 5 x 4 mm 117 nell’unità
di supporto 85.
Fig. CH-12
Con le due viti M3 x 12 mm 99 fissare l’unità di supporto da
sinistra sullo chassis 79.
Fig. CH-13
Fissare i tondini con l’ausilio delle fascette 22.
Fig. CH-02
2.2 Installare i servi
Adesso si possono installare i tre servi (Tiny-S, # 6 5121, in
alternativa Tiny-MG # 6 5122). Inserire i servi nello chassis 79.
Installare il servo dell’anticoppia (a sinistra) ed il servo del rollio
(a destra, servo posteriore), con l’asse di rotazione verso l’alto.
Per il servo del beccheggio (a destra, servo anteriore) l’asse di
rotazione deve trovarsi verso il basso. A vvitare i servi allo chassis
con rispettivamente due viti 2,2 x 13 mm 18.
Fig. CH-03
Controllare che i servi si trovino in posizione neutrale, poi
installare le squadrette Twin 76. Per il servo dell’anticoppia,
inserire il perno cardanico 20 nei fori più interni della squadretta,
per gli altri servi nei fori più esterni. Per ogni perno cardanico
avvitare – dapprima solo in modo allentato - un grano M3 x 3
mm 107. Inserire infine le squadrette premontate sull’asse di
rotazione del servo, nella rispettiva posizione neutrale – fissare
le squadrette con tre viti 2,3 x 5 mm. La squadretta del rotore
anticoppia deve essere rivolta verso l’alto, con un’inclinazione
di 10° in avanti (vedi anche capitolo 6.4), le squadrette del
beccheggio e del rollio, in orizzontale, rivolte all’indietro.
Fig. CH-04 & -05
2.3 Installare i supporti pattini
Fissare i due supporti 78 per i pattini allo chassis 79 con
rispettivamente due viti M2,5 x 12 mm 97.
Fig. CH-06
2.4 Installare il motore
Posare il motore 120davanti a se, in modo che i cavi in uscita
dal motore (sopra) siano rivolti a sinistra nella propria direzione
(posizione fra ore 7 e 8). Nel foro destro – visto dall’alto –
avvitare il primo dei due fermagli 21 con una vite M4 x 8mm
101. Per ora la vite può restare allentata.
Fig. CH-07
2.7 Installare la leva di beccheggio
Inserire le due leve di beccheggio 77 sul bilanciere sinistro 69.
Inserire il bilanciere premontato, da sinistra, sul perno dell’unità
di supporto. Da destra applicare infine il bilanciere destro 70
fissare il tutto con le due viti M2,5 x 25 mm 103. Controllare
che i bilancieri si muovano con facilità.
Fig. CH-14
2.8 Installare i rinvii
Innestare il rinvio per il beccheggio 36e quello per il rollio 38 ai
giunti sferici 55.
Fig. CH-15
2.9 Assemblare il piatto ciclico
Inserire il cuscinetto radiale Ø 21 x Ø 15 x 4 mm 115 nel piatto
ciclico superiore 53 ed avvitare le tre viti M2 x 6 mm 95.
Applicare una goccia d’olio nel cuscinetto.
Fig. CH-16
Unire il piatto ciclico inferiore 54 a quello superiore 53 – avvitare
altre tre viti M2 x 6 mm 95. Controllare che il piatto ciclico giri
con facilità.
Fig. CH-17
Applicare infine il piatto ciclico sul supporto sferico dell’unità
di supporto e agganciare i rinvii del beccheggio 77 alle sfere
esterne del piatto ciclico.
Fig. CH-18
2.10 Installare i rinvii
Agganciare il rinvio del beccheggio 36 al giunto sferico del
bilanciere, il rinvio per il rollio 38 alla sfera inferiore/destra del
piatto ciclico. Passare i rinvii nel perno cardanico, installato
sulla squadretta dei servi. Posizionare il piatto ciclico in
orizzontale e controllare che le squadrette dei servi si trovino
in posizione neutrale. Adesso avvitare i grani dei giunti
cardanici, con l’ausilio di frenafiletti.
Fig. CH-19
e
Inserire il motore con il fermaglio da destra nello chassis 79 e
serrare la vite con l’ausilio di frenafiletti. Allineare il motore, in
modo che la filettatura sul lato opposto combaci con il foro
sullo chassis.
Fig. CH-08
46
2.11 Installare l’elettronica
Come da figura, installare il regolatore di giri, il giroscopio e la
ricevente sulla parte sinistra dello chassis. Per il fissaggio
usare del nastro biadesivo, che assorbe le vibrazioni.
Accertarsi che il giroscopio venga installato nella giusta
Page 47

direzione. Consultare a tale proposito le istruzioni allegate al
giroscopio. Per fissare i cavi, usare le fascette 17.
Fig. CH-20
3. Assemblare il rotore principale
3.1 Assemblare la testa del rotore principale
Agganciare l’asta di comando 56 alla leva mobile 60. Inserire il
giunto mobile 61 nella sede posteriore della leva mobile e unire
le parti con un perno cilindrico Ø 1,5mm x 20mm 111. Fissare
il perno su un lato con una goccia di colla ciano. Fare attenzione
che la colla non coli all’interno del giunto. Inserire infine il mozzo
57 attraverso la leva mobile 60. Con il secondo perno Ø 1,5mm
x 20mm 111 unire il mozzo alla leva mobile. Anche in questo
caso fissare il perno con colla ciano.
Fig. MR-01
Adesso installare il bilanciere del rotore principale 62. Su un
lato il bilanciere è provvisto di un’apertura, sul lato opposto ci
sono due piccole scanalature. Applicare la parte sul mozzo
57 in modo da riuscire ad inserire l’asta di comando attraverso
l’apertura – le due scanalature sono rivolte verso il basso.
Fissare infine il bilanciere con un perno cilindrico Ø 3 x 28 mm
113. Inserire il perno nel foro fino a portare l’estremità a filo con
l’apertura per l’asta di comando. In nessun caso il perno deve
sporgere all’interno dell’apertura.
Fig. MR-02
Inserire il bilanciere 52 nella forcella del mozzo e fissarlo con
il perno cilindrico Ø2mm x 16 mm 112.Anche in questo caso
fissare il perno con colla ciano e controllare che il bilanciere si
muova con facilità.
Fig. MR-03
I supporti per le pale devono essere applicati in modo che i
punti che contrassegnano l’incidenza (5°) siano visibili dall’alto.
Per fissare i supporti per le pale usare le due viti cilindriche M3
x 20 mm 100.
Fig. MR-04
3.2 Rinvii e miscelazione
Innestare nei due rinvii di miscelazione 35 rispettivamente un
giunto sferico 55.
Fig. MR-05
Con le due viti M2 x 10 mm 96, fissare le due leve di
miscelazione59 al bilanciere. Il lato piano delle leve deve essere
girato verso il bilanciere. Prima d’avvitare completamente le
viti M2, inserire nei fori più esterni i tondini a “Z” 32, e nei fori
interni i rinvii di miscelazione 35. Sul lato opposto, inserire i
tondini a “Z” nel foro più esterno del bilanciere principale 62.
Installare fra la testa della vite e la leva di miscelazione
rispettivamente una rondella Ø 5 x Ø 2 x 0,3 mm 104.
Inserire infine l’estremità piegata delle leve di miscelazione
nei fori più esterni della leva di miscelazione.
Fig. MR-06
3.3 Rotore ausiliario
Le due viti cilindriche M5 x 35 mm 102 servono per appesantire
le estremità del rotore ausiliario 51.Avvitare completamente
solo una delle due viti, in modo da riuscire ad installare
successivamente il tondino stabilizzatore.
Fig. MR-07
Applicare il rotore ausiliario sul bilanciere. Inserire il tondino
stabilizzatore40 nel foro previsto e agganciare l’unità al rotore
principale. Usare un tondino sottile o qualche cosa di simile,
per spingere il tondino fino a fine corsa. Avvitare infine
completamente anche la seconda vite M5 x 35mm. Collegare
l’asta di comando 56 con il rotore ausiliario.
Fig. MR-08
3.4 Installare l’albero principale
Fig. MR-09 & -10
L’albero princip ale 31 deve essere infilato dal basso nel mozzo
del rotore principale 57. Il foro, necessario al fissaggio all’interno
del mozzo, deve essere rivolto verso l’alto. Avvitare quindi nel
foro del mozzo la vite M3 x 12mm 99; far passare la vite
attraverso il foro nell’albero. Fra la testa della vite ed il mozzo
inserire la rondella Ø 6 x Ø 3,2 x 0,3 mm 105.Avvitare infine il
dado autobloccante M3 114.
4 Assemblaggio del rotore anticoppia
4.1 Albero del rotore di coda
Fig. TR-01
Tenendo conto della distanza indicata in figura, inserire
sull’albero del rotore di coda 28 l’ingranaggio conico 75.
4.2 Assemblare il carter del rotore di coda
Fig. TR-02 & TR-03
Sul lato destro del carter 81 inserire il cuscinetto a sfere Ø 11
x Ø5 x 4mm 117. Inserire l’albero, provvisto dell’ingranaggio
conico, da sinistra nel cuscinetto installato precedentemente
ed applicare infine – sempre da sinistra – il cuscinetto a sfere
Ø 13 x Ø 7 x 4mm 116.
4.3 Assemblare il rotore di coda
Fig. TR-04, -05 & -06
Fra i supporti delle pale anticoppia 80 inserire il mozzo centrale
84 con due rondelle Ø 6 Ø 3 x 0,3 mm 106. Fare attenzione ad
installare le pale nella giusta direzione – visto da sinistra il
rotore anticoppia deve girare in senso orario.
Unire infine le parti con le due astine filettate M3 x 16mm 109.
Installare infine il ponte di comando 83, e fissarlo ai supporti
pala con l’ausilio dei due perni cilindrici Ø 1,5 x 20 mm 111.
Fig. TR-07
Adesso inserire il rotore di coda premontato sull’albero di coda
– il mozzo centrale deve inserirsi saldamente nel cuscinetto a
sfere sinistro 116. Avvitare infine le due astine filettate109 in
modo da fissare saldamente il rotore all’albero.
4.4 Bloccare l’albero di coda
Inserire da destra il collare 26 sull’albero anticoppia.
Controllare che l’intera unità sia priva di gioco, quindi avvitare i
grani M3 x 4 mm 107 con l’ausilio di frenafiletti.
Fig. TR-08
4.5 Installare il rinvio di coda
Per iniziare, inserire completamente la boccola di supporto
27, dall’interno, nel foro centrale del ponte di comando. Dalla
parte opposta, applicare il collare ponte di comando 24 e
fissarlo con il grano M3 x 3mm 107 con l’ausilio di frenafiletti.
Controllare che il ponte di comando giri facilmente sulla boccola
di supporto. Infilare il rinvio 37 per il rotore di coda, da destra,
nell’albero di coda. Lubrificare il rinvio, in modo da garantire la
facilità di movimento dell’intero sistema di comando.
Fig. TR-09
47
Page 48

4.6 Installare la squadretta di comando
Con la vite M2 x 10 mm 96 e la relativa rondella Ø 5 x Ø 2,2 x
0,3 mm 104, installare la squadretta di comando 82 per il
rotore di coda. Inserire la parte piegata del rinvio nel foro del
braccio più corto. Controllare che tutto si muova con facilità,
con il minor gioco possibile.
Fig. TR-10
4.7 Protezione rotore di coda
Inserire il tondino per la deriva 39 nei fori previsti sul carter
anticoppia 81, e fissarlo con colla ciano.
Fig. TR-11
4.8 Controllo dell’assemblaggio
Una volta terminato l’assemblaggio del rotore di coda, controllare
ancora una volta che tutte le parti siano state installate
correttamente, prendendo come riferimento le rispettive foto.
Controllare inoltre che tutte le parti si trovino nel giusto angolo
fra loro, che il senso di rotazione del rotore di coda sia corretto
e che l’intera unità si muova con facilità. Per il controllo della
funzione, muovere la squadretta agendo sul braccio più lungo,
dove successivamente verrà collegato il rinvio.
Fig. TR-12
5 Assemblare il tubo di coda
6.2 Albero principale - installazione
Preparare due collari di supporto 26, avvitando rispettivamente
due grani M3 x 3mm 107.
Fig. AS-02
Inserire il primo collare di supporto 26 verso il basso, nel
cuscinetto a sfere 117. Inserire l’unità nella sede prevista, al
centro della meccanica.
Fig. AS-03
Inserire il secondo collare di supporto 26, dal basso, nel
cuscinetto a sfere superiore e posizionare l’ingranaggio
principale sul collare al centro della meccanica. Inserire la
testa del rotore verso il basso, fino a far sporgere l’albero
principale da sotto il motore.
Fig. AS-04
Agganciare i giunti sferici al piatto ciclico superiore.
Fig. AS-05
Adesso avvitare saldamente i grani dei collari e del motore M3
x 3, con l’ausilio di frenafiletti. I grani dell’ingranaggio principale
verranno serrati più tardi.
Fig. AS-06
5.1 Premontaggio degli ingranaggi conici
In entrambi gli ingranaggi conici (anteriore 73 & posteriore 74)
inserire rispettivamente una boccola 23. Durante l’unione,
controllare che i fori siano allineati correttamente. Su entrambi
i lati, avvitare infine i grani M4 x 4mm 110 – dapprima solo in
modo allentato.
Fig. TB-01
5.2 Premontaggio del tubo di coda
Inserte el casquillo cojinete central 67 en el eje de cola 34. El
casquillo debe introducirse desde los extremos del tubo de
cola 29
cortar un tubo a la longitud deseada (no incluido en el kit) para
que le permita empujar el casquillo, de manera que al insertarlo
desde cualquier extremo del tubo de cola quede exactamente
a esa distanzia.
Fig. TB-02
Applicare infine le boccole esterne 68 alle estremità del tubo
di coda.
Fig. TB-03
Adesso fissare l’ingranaggio conico anteriore 73 all’estremità
del tubo, con il foro a 41mm dall’estremità. Il foro posteriore si
trova ad una distanza di soli 20,5 mm dall’estremità. Qui fissare
l’ingranaggio conico posteriore 74. Fra gli ingranaggi conici ed
le boccole esterne, installare rispettivamente anche una
rondella118.Applicare sui grani frenafiletti e avvitarli saldamente
alla trasmissione di coda. Controllare che tutto si muova con
facilità, con il minor gioco possibile.
Fig. TB-04 & -05
6. Assemblaggio finale
según la illustración. Lo mejor para hacer esto es
6.3 Installare il tubo di coda
Inserire la coda nello chassis, in modo che l’ingranaggio conico
vada combaciare con i denti dell’ingranaggio principale.
Fig. AS-07
Con la vite M2 x 6mm 95 (da avvitare da destra) bloccare in
senso longitudinale il tubo di coda.
Fig. AS-08
Con le viti M 2,5 x 16 (4x 98) e M 2,5 x 12 (1x 97) avvitare il
supporto 71 per fissare il tubo di coda.
Per regolare il gioco fra l’ingranaggio principale e l’ingranaggio
conico, alzare o abbassare l’ingranaggio principale.Anche in
questo caso controllare che tutto ruoti con facilità.
Consiglio: Per impostare il gioco corretto, inserire fra i denti
degli ingranaggi un pezzo di carta assorbente. Serrare i grani
dell’ingranaggio principale e quindi togliere la carta.Anche in
questo caso applicare sui grani frenafiletti.
Fig. AS-09
6.4 Installare il rotore di coda
Inserire il supporto di coda anteriore 66 ed il supporto posteriore
65 sul tubo di coda, in modo che i fori siano rivolti verso il
basso.
Inserire il tubo di coda nel carter di coda. Il foro (distante 20,5
mm dall’estremità del tubo) deve combaciare con il rispettivo
foro sul carter. Con la vite M2 x 10mm 96 fissare il carter al
tubo di coda. La vite M2 x 6 mm 95 serve per evitare uno
spostamento longitudinale del carter .
Fig. AS-10
6.1 Installare l’ingranaggio principale
Inserire la boccola esagonale 25 nell’ingranaggio principale
72. Fare attenzione che le filettature combacino con i fori
necessari all’inserimento dei due grani M4 x 6 mm 108; già
adesso i grani possono essere avviati provvisoriamente.
Fig. AS-01
48
Per comandare il rotore di coda, collegare la squadretta del
rotore di coda al servo, installando il rinvio 33. Passare il rinvio
da dietro, attraverso i due supporti di coda. Passare il rinvio
anche attraverso il perno cardanico sulla squadretta del servo
anticoppia (non avvitare ancora il grano). Inserire la parte piegata
del rinvio, da sopra, nel foro della squadretta di coda, quindi
Page 49

portare il rotore di coda in posizione neutrale. Adesso regolare
il servo anticoppia, in modo che la squadretta del servo sia
rivolta in posizione neutrale, 10° verso sinistra (elicottero visto
dal lato sinistro). A vvitare infine il grano del raccordo cardanico,
con l’ausilio di frenafiletti.
Fig.AS-11
7 Pale principali
Con le quattro astine filettate M3 x 16mm 109 fissare le pale
principali50 ai supporti.
Fig. AS-12
8 Assemblare la fusoliera
Incollare e unire i semigusci fusoliera anteriori 41L & 41R,
assieme al gancio capottina 90, posizionato nelle sedi previste.
Incollare inoltre la vetratura (86, 87, 88, 89).
Fig. AS-13
Sulla parte interna dei semigusci fusoliera posteriori 42L &
42R incollare i supporti fusoliera 43L e 43R; incollare anche i
piani di coda 44L & 44R.
Fig. AS-14
Con un taglierino affilato, tagliare il ponte dal semiguscio
fusoliera sinistro, per far posto al carter di coda.
Fig. AS-15
Incollare i semigusci 45L & 45R per la deriva solo al carter di
coda – la deriva
posteriori.
Fig. AS-16
Applicare lateralmente i semigusci fusoliera posteriori, ai
supporti inseriti sul tubo di coda.
Fig. AS-17
Inserire la fusoliera anteriore sulle guide laterali dello chassis.
Per sfilare la fusoliera anteriore, premere il gancio inferiore e
tirare in avanti la punta.
Fig. AS-18
9 Baricentro
Per il volo stazionario, il baricentro si trova sull’asse dell’albero
principale. Per il volo veloce in avanti, il baricentro può essere
spostato leggermente in avanti. Per bilanciare il modello,
spostare il pacco batteria.
Fig. CG (In breve)
non deve essere incollata ai semigusci fusoliera
49
Page 50

INICIO RÁPIDO
¡Antes de poner en marcha el modelo, lea sin falta las advertencias de seguridad!
Dependiendo de la versión de su FunCopter , puede que aun tenga que instalar los componentes electrónicos. Componentes
RC MUL TIPLEX para el modelo FunCopter:
AK = (Assembled Kit) Kit de montaje - RR = Ready for Radio
Para la versión AK:
ServoTiny S necesitará 3 (Alab., Cabe., Cola) Referencia6 5121
o Servo Tiny MG necesitará 3 (Alab., Cabe., Cola) Referencia 6 5122
GiroscopioMULTIgyro 300DP Referencia7 5503
Regulador MULTIcont BL-37/II Referencia 7 2276
Para las versiones AK y RR:
ReceptorRX-6-SYNTH light 35 MHz Bandas A/B Referencia 5 5876
como alternativa 40/41MHz Referencia 5 5877
o Receptor RX-7-DR light M-Link2,4 GHz Referencia 5 5810
(sólo si usa una emisora Multiplex 2,4 GHz)
E
Baterías recomendadas: Li-BA TT FX 3/1-3200 Referencia15 7371
Li-BATT BX 3/1-3200 Referencia15 7136
Li-BATT eco 3/1-3000 Referencia 15 7236
Cargador:
MUL TIcharger LN-3008 EQU Referencia 9 2540
Para baterías LiPo, LiIon y LiFe, de 2 o 3 elementos en serie y baterías NiMh y NiCad de 4 a 8 elementos.
Herramientas:
LlaveAllen SW 1,5 - 2 - 2,5 - 3 - 4 mm. (incluidas en el kit)
Alicates de corte, destornilladores de estrella y plano (para el ajuste del giroscopio), alicates para rótulas (recomendados).
Para instalar la electrónica consulte las ilustraciones AS. Encontrará una detallada representación del mont aje de los servos
en el manual de montaje.
Para instalar el giroscopio, preste atención al lugar correcto de montaje. Para ello, consulte las instrucciones incluidas. La
instalación del giroscopio debe realizarse con cinta aislante adhesiva de doble cara que proteja contra las vibraciones. Fije el
receptor , el regulador y la batería con velcro. Deberá tender los cables de manera que no puedan ser enganchados por las
piezas móviles.
Preste mucha atención al centro de gravedad durante la instalación de la batería (Consulte la Img. CG). Para vuelo en estacionario,
el centro de gravedad debe quedar justo debajo del buje del rotor . Para vuelo en traslación rápido, es mejor que la batería sea
desplazada hacia delante.
La varilla, o brazo, incluida de serie en el cabezal del rotor ha dado muy buen resultado. Para un ajuste fino aún más exacto
se incluye la varilla de ajuste. Así podrá ajustarse mejor el disco del cíclico (el plano de rotación creado por las palas del rotor),
y por tanto, minimizar las vibraciones producidas por éste. Sustituya la varilla del mezclador 35 y el porta rótulas 55 por la varilla
de ajuste incluida 14 y el porta rótulas con rosca 14. El montaje se realiza según lo indicado en las ilustraciones MR-05 & MR06 de las instrucciones.
Evite cualquier tensión durante el montaje ajustando correctamente la longitud de la varilla. Se puede corregir el plano de giro,
enroscando la varilla por uno de sus extremos, mientras se afloja, con el mismo número de vueltas, por el otro extremo.
Así se inclina el yugo del rotor , lo que tiene su efecto en el plano de giro.
Si se produce un empeoramiento, deberá inclinar el yugo del rotor hacia el otro lado mediante un nuevo ajuste, pero en sentido
contrario.
50
Page 51

Servo
Acumulador
Moderador
Giroscopio
Receptor
Servo
Abb.AS
Abb. CG
51
Page 52

Características técnicas:
Diámetro del rotor: 708 mm.
Longitud total: 855 mm.
Peso Aprox. 1.250 gr.
Consejos de seguridad
Estos consejos de seguridad deben ser conservados
cuidadosamente con las instrucciones de manejo y montaje,
y entregados a un tercero si le vende el producto. Si extravía
las instrucciones, siempre las tendrá disponibles para
descargarlas desde la página Web www.multiplex-rc.de.
Los modelos de helicópteros no son apropiados para
los menores de 16 años. Los menores sólo deberían utilizar
este tipo de modelos bajo la vigilancia y consejo de un adulto,
que disponga de los conocimientos apropiados y esté
concienciado de los posibles riesgos.
Un helicóptero RC no es una juguete en el sentido habitual de
la palabra. Las habilidades para su manejo deben aprenderse.
Encontrará apoyo en los clubes, en pilotos experimentados o
en las escuelas de vuelo. Le recomendamos un aprendizaje
orientado a objetivos con un simulador de vuelo. Encontrará
las direcciones de muchos clubes en la Federación de Deportes
Aéreos de su comunidad, P.Ej. www.feada.org.
El manejo y el mantenimiento de helicópteros RC requiere de
conocimientos técnicos, un mínimo de habilidad con las
herramientas, así como disciplina y sentido de la
responsabilidad. Un error o la dejadez en el mantenimiento y/
o el manejo puede provocar daños a las personas y/o las
cosas. Dado que el fabricante no tiene ninguna influencia sobre
la correcta construcción, cuidado y uso, advertimos
especialmente acerca de estos peligros. Todas las
advertencias, incluso las que puedan recogerse en otros
manuales, deben ser respetadas. Su no observación puede
provocar graves lesiones, incluso la muerte.
Atención:
-Antes de cada despegue, compruebe que las palas del rotor
todas las piezas relativas a la seguridad están bien sujetas –
especialmente antes del primer vuelo, tras el traslado del
modelo o un aterrizaje brusco. No olvide comprobar antes de
cada despegue que el funcionamiento de su emisora y del
sistema de alimentación esté libre de problemas.
- Nunca acerque su mano a la zona de giro de los rotores.
Durante el funcionamiento estas zonas presentan un alto
riesgo de lesiones. Entre otras cosas, podría sufrir un golpe
en cualquiera de sus extremidades.
- Usted es el único responsable de las consecuencias
derivadas del uso de su modelo, por lo tanto deberá disponer
de un seguro que le cubra en todo momento (Un seguro normal de responsabilidad civil no suele ser suficiente)
- Informe a todos los espectadores, antes de poner en marcha
el modelo, acerca de los posibles riesgos y pídales que
mantenga una distancia de seguridad suficiente.
- Un modelo con desperfectos debe ser reparado en su totalidad
antes de ser puesto en marcha de nuevo.
- Nunca vuele sobre personas o animales o dirija el modelo
hacia ellos.
- Para la reparación del modelo sólo debería utilizar repuestos
originales. Sólo con la utilización de piezas originales podrá
ejercer su derecho a la garantía.
- Nunca utilice su modelo en vías públicas, en parques o en
lugares de recreo. Por motivos de seguridad y razones técnicas
sólo debería utilizar su modelos en campos de vuelo
autorizados. Consulte a su distribuidor – El le dará las
direcciones de contacto apropiadas.
¡Familiarícese con su modelo!
Durante la producción, los materiales de los kits MUL TIPLEX
se someten a continuos controles. Esperamos que el
contenido del kit sea de su agrado. Aun así, le rogamos, que
compruebe que todas las piezas (según la lista de
componentes) están incluidas antes de empezar a montar,
ya que cualquier pieza que haya sido manipulada o
utilizada no podrá cambiarse En caso de que en alguna
ocasión una pieza esté defectuosa, estaremos encantados
de corregir el defecto o reemplazar la pieza, una vez realizadas
las comprobaciones pertinentes.
Por favor, envíe la pieza a nuestro departamento de construcción
de modelos, incluyendo sin falta la factura de compra y la
hoja de reclamación adjunta totalmente cumplimentada.
Trabajamos constantemente en la evolución técnica de
nuestros modelos. Nos reservamos el derecho a modificar,
sin previo aviso, el contenido del kit ya sea en forma, medidas,
técnicamente, los materiales que lo componen y su.
equipamiento. Les rogamos que comprendan, que no se
pueden hacer reclamaciones basándose en los datos, texto o
imágenes, de este manual.
¡El modelo tiene, al igual que cualquier otro avión, sus
propios límites! Las tensiones extremas o las maniobras
sin sentido pueden acabar con el modelo. Tenga en
cuenta: En estos casos no obtendrá de nosotros ninguna
reparación. Por tanto, sea muy cuidadoso a la hora de
explorar sus límites.
Notas sobre el mantenimiento:
Entre los piñones cónicos (delante: 72, 73 / detrás: 74, 57)
y los cojinetes del tubo de cola se encuentran dos
arandelas. En intervalos regulares, estos deben recibir unas
gotas de aceite de silicona. Del mismo modo, los piñones
deben ser lubricados con grasa para engranajes. Asegúrese
de que los medios empleados son compatibles con materiales plásticos.
1. Puesta en funcionamiento
Antes de ponerlo en funcionamiento, compruebe el contenido
de su kit.
Aviso: El modelo viene premontado de fábrica, aun así toda
las responsabilidad del montaje final y su posterior uso
recae exclusivamente sobre Usted.Antes del uso, deberá
comprobar cada uno de los tornillos y todos los ajustes,
especialmente el ajuste de los servos y el sentido de giro de
éstos.
Equilibrado mecánico:
El FunCopter está ajustado de manera óptima para
principiantes. Si quiere hacer que el modelo sea más ágil,
dispone de la posibilidad de enganchar las transmisiones en
el agujero más externo del brazo de los servos (¡Atención!
Los servos sufrirán mayores fuerzas! Al contacto del rotor con
52
Page 53

el suelo se incrementa mucho el riesgo de que los servos
resulten dañados), y las varillas con forma de Z (32) del rotor
principal se desplazan hacia fuera.
2. Finalización
Dependiendo de la versión, además de la inspección son
necesarias algunas tareas.
AK (Assembled Kit)= Se deben instalar todos los
componentes RC.
El modelo ha sido probado con los componentes
recomendados y todos encajan a la perfección. Si utiliza
equipamiento propio, el funcionamiento será su responsabilidad
y deberá efectuar las mediciones pertinentes.
RR (Ready for Radio)= Sólo tendrá que instalar el receptor..
Fije todos los cables sueltos con las presillas incluidas y
compruebe que éstos no pueden ser pinzados/enganchados
por los engranajes o por las varillas.
El modelos ha sido diseñado para baterías LiPo 3S- 11,1V.
(Deben soportar mínimo una carga de 35A.) Preferentemente,
utilice las baterías que le recomendamos. Tienen una relación
calidad/precio excelente y se adaptan perfectamente al
conjunto. Si aún así recurre a otro tipo de baterías, por favor,
asegúrese de ajustar el centro de gravedad correctamente.
Deberá utilizar un cargador apropiado para cargar las baterías
completamente antes de cada vuelo.
3. Inspección de funcionamiento y ajustes.
Para controlar el modelo necesitará, como mínimo, una sencilla
emisora de 4 canales, incluso sin mezclas. Conecte el equipo
siguiendo las indicaciones del fabricante.¡Por seguridad y antes
de la primera puesta en marcha, desmonte las palas del rotor
principal y sostenga el modelo por la bandeja de las baterías!
¡Asegúrese de que el motor no se ponga en marcha al encender
el equipo!
Si quiere comprobar el funcionamiento del rotor de cola
con el motor en marcha, mientras el rotor principal está
desmontado, trabaje con muy pocas revoluciones. El
rotor principal frena el sistema. ¡El rotor de cola, sin el
rotor principal montado, puede llegar a los límites
máximos de carga en cada una de las direcciones! ¡Las
consecuencias de unas revoluciones demasiado altas
pueden ser daños y heridas!
Si todos los trims de la emisora están en punto neutro,
los brazos de los servos también deberían estar en su
posición de reposo (neutra) y el cíclico debe quedar recto
(nivelado). Si no fuese el caso, deberá ajustar las
conexiones de las varillas.
Cuando mande “alabeo” a la derecha, el cíclico debe inclinarse
a la derecha.
A izquierdas, se inclinará a la izquierda.
Con el mando de “cabeceo” el cíclico deberá inclinarse hacia
delante.
Hacia atrás, se inclinará hacia atrás.
Cuando mueva el mando del rotor de cola (cola) – mando a la
derecha – la varilla deberá moverse hacia atrás. A la izquierda,
lo hará de la manera acorde.
Ajuste la cola de manera que pueda alcanzar los topes de
recorrido mecánicamente. Si debe limitar el recorrido, le
recomendamos que con emisoras computerizadas utilice la
función “Dual Rate” o “Limitación de recorrido” para ajustarlo.
Si no dispone de esta posibilidad de ajuste, y si fuese
necesario, deberá enganchar la varilla en un agujero del brazo
del servo más cercano al eje de rotación de este.
El giroscopio utilizado debe configurarse para trabajar en modo
“bloqueo de cola” (Por favor, lea también las instrucciones del
giroscopio).
Notas sobre el mantenimiento:
Entre los piñones cónicos (delante: 72, 73 / detrás: 74, 57) y
los cojinetes del tubo de cola se encuentran dos arandelas.
En intervalos regulares, estos deben recibir unas gotas de
aceite de silicona. Del mismo modo, los piñones deben ser
lubricados con grasa para engranajes. Asegúrese de que los
medios empleados son compatibles con materiales plásticos.
Si “manda” a tope en una dirección y suelta el mando a
continuación, en modo “Standard” el servo de cola volverá
rápidamente a la posición neutral, tan pronto como suelte la
palanca.
En modo “bloqueo de cola” el servo de cola tenderá a
mantenerse en el tope de recorrido. No se confunda. Asegúrese
de que la cola acaba en “posición de reposo”, compruebe el
valor de trimado de la señal del servo de cola (para emisoras
computerizadas: No debe haber asignada mezcla alguna para
la señal de cola, utilice una configuración para aviones de
cuatro canales con el FunCopter).
Si hay un diferencia de temperatura notable, le recomendamos
que espere unos 5 minutos con el receptor y el giróscopo
encendidos, antes de empezar a volar. A continuación,
apáguelo y vuélvalo a encender.
Tras ello, el FunCopter estará listo para volar .
El sentido de giro puede ajustarse mediante el interruptor
deslizante REVERSER <—>
Compruebe la compensación de su giróscopo girando, con
fuerza, su helicóptero por su eje longitudinal. Si el giróscopo
compensa en el sentido contrario, la posición del interruptor
<—> REVERSE está invertida y tendrá que modificarla, p.
Ej., con un destornillador. El interruptor se encuentra en el
lateral derecho del chasis.
¡Antes de modificar la posición del interruptor debe apagar
forzosamente el equipo RC!
Nota
Encontrará más indicaciones sobre el giróscopo en las
instrucciones incluidas.
4. Inspección final
a. El rotor de cola debe moverse con facilidad.
b. Vuelva a montar las palas del rotor principal. Las palas
deben moverse arriba y abajo sin dificultad y deben encajar en
la posición de trabajo.
c. Las rótulas de la transmisión deben estar suficientemente
prietas, pero solo lo suficiente para que no suban o caigan por
efecto de la gravedad.
d.T odas las uniones eléctricas deben hacer contacto al 100%.
Los conectores deben conectarse completamente y cualquier
cable suelto debe fijarse con presillas. La cabina debe estar
colocada.
f. Compruebe el centro de gravedad. Para ello, sostenga el
helicóptero con dos dedos por el rotor auxiliar . El helicóptero
debe quedar suspendido, de manera que el tubo de cola quede
en horizontal. Puede hacer correcciones desplazando la
53
Page 54

batería. Si no, añada lastre.
g. Compruebe cada 5 – 10 horas de funcionamiento las
arandelas 1 18 y sustitúyalas en caso de desgaste.
5. Prueba de alcance
Para la prueba de alcance deberá desmontar , obligatoriamente,
las palas del porta palas del rotor principal. Si durante la
prueba se presentan interferencias, que puedan poner en
marcha el motor inesperadamente, el riesgo sufrir lesiones o
producir desperfectos en otros objetos será sensiblemente
menor. Se recomienda colocar el modelo sobre una mesa p ara
hacer las pruebas de alcance. Si el modelo se deja sobre el
suelo, se corre el riesgo de falsear el resultado de la prueba.
Realice una prueba de alcance completa con el motor en
marcha y otra con el motor parado. Bajo ningún concepto
debe fijarse el modelo al suelo, ya que se pueden producir
resonancias que pueden llegar a destruir el modelo por
completo. Pídale a un ayudante que se quede junto al modelo
y le ayude a comprobar si aparecen “temblores” en los servos
mientras usted se aleja con la emisora. Realice la prueba del
alcance siguiendo las indicaciones del fabricante de la emisora.
6. El primer vuelo
Para su primer vuelo, espere siempre a un día en el que haga
el menor viento posible. Lo mejor es que vuele su modelo en
una campo de vuelo autorizado.
Para empezar, por razones legales, y además, especialmente
Para empezar, por razones legales, y además, especialmente
para los principiantes, en estos lugares encontrará ayuda
apropiada. Lo más recomendable es instalar unos patines de
aprendizaje (tacatá), de manera que al helicóptero le resulte
más difícil el vuelco. Coloque el modelo contra el viento, a
unos 5 m. por delante de Usted. Un césped corto o una pista
dura en los mejor – Los patines no se engancharán tan
fácilmente y el rotor de cola podrá girar libremente.
Tras una última inspección de funcionamiento, empiece a
acelerar con cuidado hasta que el helicóptero empiece a “flotar”,
comprobando con cuidado las funciones y su trimado.
En los primeros intentos no permita que el helicóptero ascienda
más de 1 o 1,5 m., pero tampoco permita que resbale sobre el
suelo.
Tampoco permita que se aleje más de 15-20 m., desde el
punto de partida. Por motivos de seguridad, tampoco debería
permitir que esté a menos de 5 m. de Usted mismo. Si se
presenta una situación crítica, aterrice el helicóptero. No quite
“Gas” de manera dubitativa, pero tampoco con nervios. A
menudo es más seguro, cuando ya no se puede evitar el
accidente o un aterrizaje brusco, detener el moto por completo.
Normalmente, el modelo “sobrevivirá” con los menos daños
posibles.
7. El primer vuelo en traslación
Cuando pueda realizar estacionarios frente a sí con cierta
soltura, cambie su posición. Colóquese de lado respecto a
su helicóptero.
De nuevo a unos 5 m. de separación y despegue desde esa
posición. Ahora intente volar despacio hacia delante. El
helicóptero debería tener la misma posición respecto a Usted.
Mantenga la separación y la altura y acompañe el giro del
helicóptero que vuela hacia delante.
Si el primer círculo no le sale a la primera, no hay ningún
problema.
Aterrice helicóptero y vuelva a intentarlo. Con el FunCopter
deberá tener en cuenta que al descender tiene tendencia a
encabritarse. Esté preparado para ello y reaccione Si el
encabritado es demasiado fuerte, reduzca la velocidad de
descenso.
Durante el descenso, asegúrese de no apagar nunca el motor .
Si se cae por debajo de un número mínimo de revoluciones,
puede darse el caso de que las palas del rotor se doble hacia
arriba por la corriente de aire generada por el descenso, algo
que ya no podrá ser corregido.
8. V olar haciendo ochos
El siguiente obstáculo es “volar hacia uno mismo”. Para facilitar
las cosas, haga algunos ochos delante de Usted, siempre
contra el viento. Notará que es realmente más difícil cuando
vuela hacia Usted mismo.
A continuación, haga ochos a izquierda y derecha. V erá que
cuanta más práctica tenga más redondos y mayores le saldrán
los ochos.
9. Aterrizajes y aterrizajes de emergencia
Aterrizar tras un estacionario es lo más fácil. Solo tiene que
ir quitando gas, poco a poco, y compruebe las reacciones – si
el helicóptero comienza a descender demasiado rápido vuelva
a dar algo de gas. Todo con calma.
Volando hacia delante, tire un poco del gas y frene el
helicóptero con el cabeceo (hacia atrás), para pasar a
estacionario vuelva a dar algo de gas – a continuación, aterrice
como hizo anteriormente estando en estacionario.
Si todo va realmente mal, y no hay manera de evitar un
aterrizaje brusco o un accidente, es mejor detener el motor
por completo. De este modo, el modelo tendrá mayores
probabilidades de supervivencia que si el rotor golpease un
obstáculo mientras funciona.
10. Vibraciones
El FunCopter es un helicóptero de revoluciones controladas,
por tanto, dependiendo de la situación de vuelo el rango de
revoluciones será distinto. Durante el descenso, las
revoluciones del rotor pueden ser tan bajas que el modelo
entre en resonancia y comience a vibrar. ¡Pánico no! Aumente
las revoluciones hasta que el FunCopter vuelva a „calmarse”,
esto ocurre realmente rápido.
Al empezar a girar el rotor es normal que el helicóptero vibre
durante un instante, hablamos de resonancia al suelo, que se
acaba tan pronto como se aumentan las revoluciones. Si se
presentan vibraciones en el vuelo, tras un accidente o por daños
durante el transporte, indicarán que algo no está bien.
Compruebe si el eje del rotor principal o el de cola están
doblados, para ello, desmonte los ejes y hágalos rodar sobre
una superficie plana. Si aprecia la más mínima deformación,
deberá sustituir los ejes.
Aunque siga siendo posible volar con el modelo si vibra, todos
los componentes electrónicos se verán seriamente
perjudicados por las vibraciones y podrían sufrir daños permanentes.
Si el modelo vibra, aunque no haya sufrido percance alguno,
será imprescindible el proceder al equilibrado de las palas del
rotor. Coloque en la zona del centro de gravedad de las palas
(en el extremo exterior del turbulator inyectado – puentecillo
de plástico saliente – por la cara superior de la pala) tanta
cinta adhesiva como sea necesaria hasta que las palas estén
equilibradas con una diferencia máxima de una décima de
gramo.
54
Page 55

11. Seguridad
La seguridad es el primer mandamiento del aeromodelismo.
El seguro de responsabilidad civil es obligatorio. En caso de
que vaya a entrar en un club o una asociación puede realizar
Notas sobre reparaciones
Aunque el modelo es realmente resistente, pero siempre puede
pasar algo.
Para estos casos hemos divido el modelo en 5 bloques.
la gestión del seguro por esa vía. Preste atención a la cobertura
del seguro (aviones con motor).
Mantenga siempre los modelos y la emisora en perfecto estado.
Infórmese acerca de las técnicas de carga de las baterías que
vaya a utilizar. Utilice las medidas de seguridad más lógicas
que estén disponibles. Infórmese en nuestro catálogo principal.
Los productos MULTIPLEX son el resultado práctico, de la
práctica de experimentados pilotos de radio control.
¡Vuele responsablemente! Realizar pasadas por encima de
las cabezas de la gente no es una demostración de saber
hacer, los que realmente saben no necesitan hacer eso. Llame
la atención a otros pilotos, por el bien de todos, si se comportan
de esta manera. Vuele siempre de manera que no se ponga
nadie en peligro, ni a Usted, ni a otros. Recuerde que hasta el
equipo de radio control más puntero puede verse afectado por
interferencias externas. Haber estado exento de accidentes
durante años, no es una garantía para el siguiente minuto de
vuelo
12. Transporte
Para el transporte del FunCopter se incluye la fijación de las
palas del rotor .
Con las palas del rotor plegadas hacia atrás, coloque la fijación
en ambas ranuras y fíjela en el hueco del tubo de cola. De
esta manera podrá transporta el FunCopter de manera
compacta y segura.
Nosotros, el equipo MUL TIPLEX, deseamos que disfrute del
montaje y posterior vuelo y que obtenga el mayor éxito y
satisfacción.
MUL TIPLEX Modellsport GmbH &Co. KG Soporte y desarrollo
de productos
Klaus Michler
Consejos para el ajuste de la emisora:
Si utiliza una emisora programable, le recomendamos los siguientes ajustes:
Para el FunCopter podría utilizar una simple memoria para modelos de aviones para evitar mezclas no deseadas que puedan afectar
a la cola. No es necesario un programa para helicópteros.
Para “cola” (”Profundidad”) y “alabeo” (“alerones”) podría agregar, a su volunt ad, Expo, Dual Rate o limitación de recorrido, dependiendo
de cómo desee que su FunCopter reaccione. Para la función del rotor de cola debería trabajar solamente con Dual-Rate o limitación
de recorrido, para adaptar los movimientos de la cola a sus deseos.
También da buenos resultados la programación de una segunda fase de vuelo. La primera fase, para el vuelo en estacionario, en la
que deberá trimar el FunCopter de manera que permanezca en un lugar fijo. La segunda fase debería ser configurada con un pequeño
valor de trimado hacia delante en el “cabeceo”. De este modo, el modelo siempre tenderá a irse hacia delante, lo que hará el vuelo en
traslación más cómodo.
1. Chasis con patines de aterrizaje
2. Rotor principal
3. Rotor de cola
4. Tubo de cola
5. Fuselaje
Con las representaciones gráficas siempre le será más fácil
desmontar , y volver a montar , el bloque apropiado.
Los siguientes repuestos están disponibles:
Repuestos
Palas del rotor de cola (1 pareja) # 22 3001
Eje del rotor principal # 22 3002
Porta palas 5º # 22 3003
Piñonería # 22 3004
Set de varillas # 22 3005
Juego de palancas del rotor # 22 3006
Juego de cíclicos # 22 3007
Balancines cabeceo # 22 3008
Juego brazos servo-transmisión # 22 3009
Juego cabezal del rotor # 22 3010
Juego rotor auxiliar # 22 3011
Eje rotor de cola # 22 3012
Juego tubo cola # 22 3013
Set transmisiones de cola # 22 3014
Juego carcasa rotor de cola # 22 3015
Set chasis # 22 3016
Soporte patines (1 pareja) # 22 3017
Juego de patines # 22 3018
Lámina decorativa # 22 3019
Revestimiento fuselaje delantero +
parabrisas # 22 3020
Revestimiento fuselaje trasero +
estabilizadores # 22 3021
Palas del rotor principal (1 pareja) # 22 3022
Articulación ajuste (1 pareja) # 22 3023
Fijación de palas del rotor # 23 3024
Arandela Ø7xØ2x0,3mm (10 Uds.) # 23 3025
Buje del rotor suelto # 22 3026
Carcasa rotor de cola con piezas de foam # 22 3027
Motor sin escobillas (Himax C 6310-0225) # 33 3070
Le recomendamos los siguientes valores para los equipos MUL TIPLEX:
Función Fase de vuelo “estacionario” Fase de vuelo “traslación”
Cabeceo (Profundidad) Expo: 30 %, Recorrido: 70 % Recor.: 100 %, T rimado aprox. 5%
adelante / abajo
Alabeo (Alerones) Expo: 30 %, Recorrido: 70 % Recorrido: 100 %
Cola (Dirección) Recorrido: 60 % Recorrido: 60 %
55
Page 56

Lista de piezas FunCopter
N
repuestos
1 1 1 Instrucciones del modelo Papel
2 1 1 Instrucciones del motor Papel
3 0 1 Instrucciones del regulador Papel
4 0 1 Instrucciones del giróscopo Papel
Herramientas y transmisiones ajustables
8 1 1 Llave Allen Metal SW 1,5 mm
9 1 1 Llave Allen Metal SW 2 mm
10 1 1 Llave Allen Metal SW 2,5 mm
11 1 1 Llave Allen Metal SW 3 mm
12 1 1 Llave Allen Metal SW 4 mm
13 2 2 Varillas de ajuste Metal M2x12 Ø1,8 x 12 x 42,5 mm. # 223023 (2x)
14 2 2 Porta rótulas roscado Plástico Pieza prefabricada # 223023 (2x)
Accesorios diversos AK
15 3 0 Velcro adhesivo rugoso Plástico 25 x 60 mm. # 683112 (5x)
16 3 0 Velcro adhesivo suave Plástico 25 x 60 mm. # 683112 (5x)
17 4 0 Presillas Plástico 98 x 2,5 mm.
18 6 0 T ornillos Fijaciones Metal 2,2 x 13 mm. # 682652 (50x)
Accesorios diversos (montados)
20 3 3 Retén de varilla Metal Pieza torneada Ø6mm # 223009 (1x)
21 2 2 Retén /Soporte Metal Troquelado 1,5mm # 223016 (2x)
22 8 8 Presillas Plástico 142 x 2,5 mm. # 223017 (4x);
23 2 2 Casquillo de apriete Metal SW5,9 x Ø1,9 x 10,5 mm. # 223004 (2x)
24 1 1 Collarín Metal Ø8 x Ø3,2 x 5 mm. # 223014 (1x)
25 1 1 Piñón cónico principal Metal SW 11,9 x Ø4,05 x 16 mm . # 223004 (1x)
26 3 3 Collarín (cojinete) Metal Ø 11 x Ø4,95 x Ø4,05 x 9,1 mm. # 223002 (1x)
27 1 1 Casquillo rodamiento cola Metal Ø6 x Ø3 x Ø1,9 x 10 mm. # 223014 (1x)
28 1 1 Eje rotor de cola Metal Ø4 x SW4 x Ø1,9 x 51 mm. # 223012 (1x)
29 1 1 Tubo de cola Metal SW 12 x 0,4 x 450 mm. # 223013 (1x)
30
31 1 1 Eje del rotor principal Acero endurecido Ø4 x 200 mm. # 223002 (1x)
32 2 2 Varilla en Z rotor princ. Acero forjado Ø1,8 x 16 x 19 mm. # 223005 (2x)
33 1 1 Varilla cola Acero forjado Ø1,8 x 537 mm. # 223013 (1x)
34 1 1 Eje de cola Acero forjado Ø1,5 x 478 mm. # 223013 (1x)
35 2 2 Varilla brazo mezclador Acero forjado Ø1,8 x 45 x 14 mm. # 223005 (2x)
36 1 1 Varilla cabeceo Acero forjado Ø1,8 x 75 mm. # 223005 (1x)
37 1 1 Varilla rotor cola Acero forjado Ø1,8 x 83 x 17 mm. # 223005 (1x)
38 1 1 Varilla alabeo Acero forjado Ø1,8 x 90 mm. # 223005 (1x)
39 1 1 Varilla estabilizador vertical Acero forjado Ø1,8 mm. # 223015 (1x)
40 1 1 Varilla estabilizador Acero forjado Ø1,8 x 215 mm. # 223011 (1x)
AK RR
um. Uds. Uds. Descripción Material Dimensiones Contenido en el paquete de
para servos
# 223018 (8x)
# 223018 (8x)
hexagonal
# 223014 (2x)
2 2 Pata de patín Acero forjado Ø1,8 x 160 x 49 mm. # 223018 (2x)
# 223012 (1x)
# 223014 (1x)
# 223027 (1x)
Revestimiento del fuselaje + lámina decorativa (montado)
41L 1 1 Fuselaje delantero izquierdo Espuma plástica Pieza prefabricada # 223020 (1x)
41R 1 1 Fuselaje delantero derecho Espuma plástica Pieza prefabricada # 223020 (1x)
42L 1 1 Fuselaje trasero izquierdo Espuma plástica Pieza prefabricada # 223021 (1x)
42R 1 1 Fuselaje trasero derecho Espuma plástica Pieza prefabricada # 223021 (1x)
43L 1 1 Guía fuselaje izquierda Espuma plástica Pieza prefabricada # 223021 (1x)
43R 1 1 Guía fuselaje derecha Espuma plástica
44L 1 1 Estabilizador horizontal. izquierdo Espuma plástica Pieza prefabric # 223021 (1x)
44R 1 1 Estabilizador horizontal derecho Espuma plástica Pieza prefabricada # 223021 (1x)
45L 1 1 Estabilizador vertical izquierdo Espuma plástica Pieza prefabricada # 223021 (1x)
45R 1 1 Estabilizador vertical derecho Espuma plástica Pieza prefabricada # 223021 (1x)
46 1 1 Fijación de las palas Espuma plástica Pieza prefabricada # 223024 (1x)
49 1 1 Lámina decorativa Lámina adhesiva Pieza prefabricada # 223019 (1x)
Piezas de plástico inyectado (montadas)
50 2 2 Pala rotor principal Plástico inyectado Pieza prefabricada # 223022 (2x)
51 1 1 Rotor auxiliar Plástico inyectado Pieza prefabricada # 223011 (1x)
52 1 1 Balancín Plástico inyectado Pieza prefabricada # 223011 (1x)
53 1 1 Cíclico superior Plástico inyectado Pieza prefabricada # 223007 (1x)
54 1 1 Cíclico inferior Plástico inyectado Pieza prefabricada # 223007 (1x)
55 4 4 Porta rótulas con enganche Plástico inyectado Pieza prefabricada # 223005 (4x)
56 1 1 Varilla de mando Plástico inyectado Pieza prefabricada # 223006 (1x)
57 1 1 Buje del rotor Plástico inyectado Pieza prefabricada # 223010 (1x)
59 2 2 Brazo mezclador Plástico inyectado Pieza prefabricada # 223006 (2x)
60 1 1 Brazo de ajuste Plástico inyectado Pieza prefabricada # 223006 (1x)
61 1 1 Articulación de ajuste Plástico inyectado Pieza prefabricada # 223006 (1x)
Pieza prefabricada # 223021 (1x)
# 223027 (1x)
# 223027 (1x)
impresa
# 223026 (1x)
# 223010 (1x)
56
Page 57

Num. Uds. Uds. Descripción Material Dimensiones Contenido en el paquete de
repuestos
62 1 1 Horquilla del rotor Plástico inyectado Pieza prefabricada # 223010 (1x)
63 1 1 Patín izquierdo Plástico inyectado Pieza prefabricada # 223018 (1x)
64 1 1 Patín derecho Plástico inyectado Pieza prefabricada # 223018 (1x)
65 1 1 Soporte cola trasero Plástico inyectado Pieza prefabricada # 223013 (1x)
66 1 1 Soporte cola delantero Plástico inyectado Pieza prefabricada # 223013 (1x)
67 33Casquillo cojinete central Plástico inyectado Pieza prefabricada # 223013 (2x)
68 2 2 Cojinete tope cola Plástico inyectado Pieza prefabricada # 223013 (2x)
69 1 1 Balancín cabeceo izquierdo Plástico inyectado Pieza prefabricada # 223008 (1x)
70 1 1 Balancín cabeceo derecho Plástico inyectado Pieza prefabricada # 223008 (1x)
71 1 1 Pinza del tubo de cola Plástico inyectado Pieza prefabricada # 223016 (1x)
72 1 1 Piñon de ataque principal Plástico inyectado Pieza prefabricada # 223004 (1x)
73 1 1 Piñón cónico eje cola delantero Plástico inyectado Pieza prefabricada # 223004 (1x)
74 1 1 Piñón cónico eje cola trasero Plástico inyectado Pieza prefabricada # 223004 (1x)
75 1 1 Piñon eje rotor de cola Plástico inyectado Pieza prefabricada # 223004 (1x)
76 3 3 Escuadra mando Twin Plástico inyectado Pieza prefabricada # 223009 (1x)
77 2 2 Articulación cabeceo Plástico inyectado Pieza prefabricada # 223008 (2x)
78 2 2 Soporte patines Plástico inyectado Pieza prefabricada # 223017 (2x)
79 1 1 Chasis Plástico inyectado Pieza prefabricada # 223016 (1x)
80 2 2 Pala rotor de cola Plástico inyectado Pieza prefabricada # 223001 (2x)
81 1 1 Carcasa rotor de cola Plástico inyectado Pieza prefabricada # 223015 (1x)
82 1 1 Palanca rotor cola Plástico inyectado Pieza prefabricada # 223014 (1x)
83 1 1 Puente de control Plástico inyectado Pieza prefabricada # 223014 (1x)
84 1 1 Pieza central rotor de cola Plástico inyectado Pieza prefabricada # 223014 (1x)
85 1 1 Cabezal cojinete Plástico inyectado Pieza prefabricada # 223016 (1x)
86 1 1 Parabrisas Izq-Sup Plástico inyectado Pieza prefabricada # 223020 (1x)
87 1 1 Parabrisas Der-Sup Plástico inyectado Pieza prefabricada # 223020 (1x)
88 1 1 Parabrisas Izq-Del Plástico inyectado Pieza prefabricada # 223020 (1x)
89 1 1 Parabrisas Der-Del Plástico inyectado Pieza prefabricada # 223020 (1x)
90 1 1 Cierre cabina Plástico inyectado Pieza prefabricada # 223020 (1x)
91 2 2 Porta palas 5º => 5 puntos Plástico Pieza prefabricada # 223003 (2x)
AK R R
# 223027 (1x)
Piezas normalizadas (montados)
95 8 8 T ornilloAllen cilíndrico Metal M2 x 6mm # 223007 (6x)
96 4 4 T ornilloAllen cilíndrico Metal M2 x 10mm # 223006 (2x)
97 5 5 T ornilloAllen cilíndrico Metal M2,5 x 12 mm. # 223016(1x)
98 4 4 T ornilloAllen cilíndrico Metal M2,5 x 16mm. # 223016 (4x)
99 3 3 T ornilloAllen cilíndrico Metal M3 x 12mm # 223010 (1x)
100 2 2 TornilloAllen cilíndrico Metal M3 x 20mm # 223003 (2x)
101 2 2 TornilloAllen cilíndrico Metal M4 x 8mm # 223016 (2x)
102 2 2 TornilloAllen cilíndrico Metal M5 x 35mm # 223011 (2x)
103 2 2 Tornillo cabeza avellanada Metal M2,5 x 25mm. # 223008 (2x)
104 3 3 Arandela
105 1 1 Arandela Metal Ø3,2 mm. (M3) # 223010 (1x)
106 2 2 Arandela Plástico Ø3,2 mm. (M3) # 223001 (2x)
107 10 10 Prisionero Metal M3 x 3mm # 223002 (2x)
108 2 Prisionero Metal M4 x 6mm # 223004 (2x)
109 6 6 Prisionero Metal M3 x 16mm # 223001 (2x)
110 4 4 Prisionero Metal M4 x 4 mm # 223022 (2x)
111 4 4 Perno endurecido Metal Ø1,5m6 x 20mm # 223001 (2x)
112 1 1 Perno endurecido Metal Ø2m6 x 16mm # 223006 (1x)
113 1 1 Perno endurecido Metal Ø3m6 x 28mm # 223010 (1x)
114 3 3 Tuerca autoblocante Metal M3 # 223010 (1x)
115 1 1 Rodamiento delgado (Radial) Metal Ø21 x Ø15 x 4mm # 223007 (1x)
116 1 1 Rodamiento Metal Ø13 x Ø7 x 4mm # 223015 (1x)
117 3 3 Rodamiento Metal Ø11 x Ø5 x 4mm # 223015 (1x)
118 2 2 Arandela Plástico Ø7 x Ø2 x 0,3mm # 223004 (2x)
119 4 4 Tuerca autoblocante Metal M2,5 # 223016 (4x)
Metal Ø2,2 mm. (M2) # 223006 (2x)
# 223015 (1x)
# 223016 (1x
# 223014 (1x)
# 223015 (1x)
# 223016 (2x)
# 223014 (1x)
# 223009 (1x)
# 223014 (3x)
# 223010 (2x)
# 223016 (2x)
# 223025 (10x)
Componentes RC (montados)
120 1 1 Motor brushless Himax C 6310-0225 Pieza prefabricada # 333070 (1x)
121 0 3 Servo sin brazo / con tornillos Tiny-S Pieza prefabricada # 65121 (1x)
122 0 1 Regulador MULTIcont BL-37/II Pieza prefabricada # 72276 (1x)
123 0 1 Giróscopo + 2 alfombras montaje MULTIgyro 300DP Pieza prefabricada # 75503 (1x)
15 0 3 Velcro adhesivo rugoso Plástico 25 x 60 mm. # 683112 (5x)
16 0 3 Velcro adhesivo suave Plástico 25 x 60 mm. # 683112 (5x)
17 0 4 Presillas Plástico 98 x 2,5 mm.
18 0 6 T ornillos Fijaciones Metal 2,2 x 13 mm. # 682652 (50x)
para servos
57
Page 58

Aviso importante:
¡El fuselaje del modelo es de EPP! Por tanto, no debe usar
cola blanca, poliuretano o Epoxy para las uniones.
Para el pegado del material le recomendamos que
emplee cola termo fusible.
Desde el lado derecho, inserte el motor con el retén en el
chasis 79 y apriete el tornillo utilizando laca fija tornillos para
el apriete. Alinee el motor de manera que la rosca quede en el
lado contrario, quede cubierta por igual por el hueco del chasis.
Img. CH-08
1. Antes de comenzar el montaje
Antes de comenzar el montaje, compruebe el contenido de
su kit. Para ello, le serán muy útiles las Img. 1+2 y la lista de
partes.
Durante el montaje del FunCoptertendrá que instalar algunas
rótulas.Apriételas fuerte, de manera que las articulaciones se
muevan con dificultad, como ayuda puede utilizar unas tenazas
para introducirlas en los porta rótulas, presionándolas con
cuidado.
2. Montaje de la mecánica
2.1 Montaje del patín de aterrizaje
Img. CH-01
Inserte las varillas 30 en ambos patines 63 y 64 y colóquelos
en la posición apropiada.
Usando las cuatro presillas 22 fije ahora las varillas de los
patines en los huecos previstos para ello.
Img. CH-02
2.2 Instalación de los servos
A continuación se montan los tres servos (Tiny-S, # 6 5121, o
como alternativa Tiny-MG # 6 5122). Coloque los servos en el
chasis79.Tenga en cuent a, que el servo de cola (izquierda) y
el servo de alabeo (derecha, atrás) deben montarse de manera
que la corona dentada quede hacia arriba. En el servo de
cabeceo (derecha, delante) la corona dentada debe quedar
hacia abajo. Cada uno de los servos se fija al chasis con
dos tornillos de 2,3 x 13 mm. 18, Img. CH-03
Asegúrese de que los servos estén en posición neutral. Ahora
podrá montar los dos brazos de servo T win76. En el servo de
cola, los kardans 20 se insertan en el agujero interior del brazo
del servo, en el resto de servos se insertan en el agujero exterior.
En cada uno de los kardan se debe enroscar un perno M3 x 3
mm. 107 – por ahora sin apretar. Encaje los brazos de los
servos preinstalados en la corona dentada del servo,
manteniendo la posición neutral de éste, y fíjelos con los tornillos para servos de 2,3 x 5 mm. El brazo del rotor de cola
debería apuntar unos 10º hacia delante (ver también el paso
de montaje 6.4), el brazo de los servos de cabeceo y alabeo
deben quedar en horizontal, mirando hacia atrás.
Img. CH-04 & -05
2.3 Montaje del soporte de los patines
Cada uno de los dos soportes de los patines 78 se fijan al
chasis 79 con dos tornillos 97 M2,5 x 12 mm..
Img. CH-06
Ahora, fije el retén 21 a la parte izquierda del chasis 79.
Apriete, aplicando un poco de laca fija tornillos, el tornillo 101
M4x 8.
Img. CH-09
2.5 Montaje adicional del patín de aterrizaje
Enganche los patines de aterrizaje a sus soportes.
Img. CH-10
Fije las varillas de los patines de aterrizaje con las cuatro
presillas 142 x 2,5 mm 22 a los soportes de los patines.
Img. CH-11
2.6 Montaje del cabezal del cojinete
Coloque el rodamiento 117 Ø 1 1 x Ø 5 x 4 m en el cabezal del
cojinete85.
Img. CH-12
Use los dos tornillos M3 x 12 mm. 99 para fijar el cabezal del
cojinete, desde la izquierda, a la parte superior (cúpula) del
chasis 79.
Img. CH-13
2.7 Montaje del balancín de cabeceo
Introduzca ambas transmisiones de cabeceo 77 en el balancín
69, a la izquierda.
Presione, desde la izquierda, el balancín pre-montado contra
los pivotes del cabezal del cojinete. Desde el lado derecho se
encajará ahora el balancín derecho 70. Usando los dos tornil-
los 103 M2,5 x 25mm. se aprietan entre sí las piezas del
balancín. Compruebe que se pueda mover sin dificultad.
Img. CH-14
2.8 Montaje de las varillas
Fije la varilla de cabeceo 36 y la de alabeo 38 en el porta
rótulas55.
Img. CH-15
2.9 Montaje del cíclico
Presione el cojinete 115 Ø 21 x Ø 15 x 4 mm. en el cíclico 53
, desde arriba, y apriete los tres tornillos 95 M2x 6mm. Eche
un par de gotas de aceite en el rodamiento.
Img. CH-16
Ahora, presione el cíclico 54, desde abajo, para que encaje
con el superior . Con otros tres tornillos 95 M2 x 6 mm. se fijan
entre sí ambas mitades del cíclico. Compruebe también que
se pueda mover sin dificultad.
Img. CH-17
2.4 Instalación del motor
Coloque el motor 120 ante sí, de tal manera que los cables
que sobresalen (arriba) apunten hacia la izquierda según su
ángulo de visión (A las 7 u 8 en punto). Con la rosca derecha,
vista desde arriba, atornille ahora el primero de los dos retenes
21 usando los tornillos 101 M4x 8. No apriete aún los tornillos.
Img. CH-07
58
Coloque el cíclico sobre los porta rótulas del cabezal del
cojinete y presione él porta rótulas de cabeceo 77 contra las
rótulas exteriores del cíclico.
Img. CH-18
2.10 Instalación de las varillas
Ahora, presione la transmisión de cabeceo 36 contra la rótula
del balancín de cabeceo. La transmisión de alabeo 38 se
presiona contra la rótula derecha que sobresale del cíclico
Page 59

inferior.A continuación, enganche la varilla en el kardan del
brazo del servo. Coloque el cíclico en posición horizontal y
compruebe, que el brazo del servo siga estando en posición
neutra. Cuando lo haya comprobado, podrá apretar los
prisioneros de los kardans. Para ello, aplique un poco de laca
fija tornillos.
Img. CH-19
2.11 Instalación de la electrónica
Siguiendo la ilustración, coloque en el lado izquierdo de la
mecánica el regulador, el giróscopo y el receptor. En este
punto es muy útil la cinta adhesiva aislante de doble cara para
evitar vibraciones y proteger los componentes electrónicos.
Compruebe durante el montaje que la posición del giróscopo
quede en la posición correcta. Para ello, consulte las
instrucciones del giróscopo.
Para tender los cables use otras cuatro de las presillas 17
suministradas.
Img. CH-20
3 Montaje del rotor principal
3.1 Instalación del cabezal del rotor
La barra de control 56 se encaja en el brazo de ajuste 60.
Inserte la articulación de ajuste 61 en la cogida trasera del
brazo de ajuste y una las piezas con el perno cilíndrico Ø
1,5m6 x 20 mm. 111.
Aplique un poco de cianocrilato en un extremo para fijar el
pasador.
Debe asegurarse que el cianocrilato no caiga en la articulación.
A continuación, pase el buje del rotor 57 por el brazo de ajuste.
Fije, entre sí, el buje del rotor y el brazo de ajuste con el
segundo pasador Ø 1,5m6 x 20 mm 111. Vuelva a utilizar un
poco de cianocrilato para asegurarlo.
Img. MR-01
Lo siguiente es colocar la horquilla del rotor 62. La pieza
tiene en un lado un hueco, en el otro lado tiene dos pequeñas
bolsas.Ahora, encaje la pieza en el buje del rotor 57, de manera
que el brazo de control 56 salga por el agujero y las dos bolsas
queden abajo. Con el pasador Ø 3 x 28 mm 113 se fija la
horquilla del rotor.
Empuje el perno hacia dentro hasta que quede enrasado con
la apertura de la barra control. Bajo ningún concepto debe
sobresalir el pasador por la apertura.
Img. MR-02
El balancín 52 se coloca entre los cubos de los rodamientos
del buje del rotor y se fija con el pasador cilíndrico Ø 2m6 x 16
mm 112. Por seguridad, utilice un poco de cianocrilato y
compruebe la movilidad del conjunto.
Img. MR-03
El porta palas 91 debe colocarse de tal modo, que los puntos
inyectados, que indican la inclinación (5º), puedan verse desde
arriba. Para fijar el porta palas utilice los dos tornillos cilíndricos
M3 x 20 mm 100.
Img. MR-04
3.2 T ransmisión y mezclador
Enrosque en cada una las varillas del brazo de mezclas 35 un
porta rótulas con enganche 55.
Img. MR-05
Los brazos mezcladores 59 se fijan al balancín con los tornillos M2 x 10 mm 96. Al hacerlo, el lado plano del brazo
mezclador apunta al balancín. Antes de apretar por completo
los tornillos M2, las varillas en forma de Z del rotor principal se
introducirán en los agujeros exteriores y en los agujeros
interiores de la varilla del brazo de mezcla 35. Las
varillas en forma de Z se encajan del otro lado, en el agujero
que queda por fuera d la horquilla del rotor. Entre el cabeza de
los tornillos y el brazo de mezclas siempre se coloca una
arandela Ø 5 x Ø 2 x 0,3 mm 104:
Ahora, la parte curvada de la varilla del brazo de mezclas en el
agujero exterior de los brazos de mezclas.
Img. MR-06
3.3 Rotor auxiliar
Los dos tornillos cilíndricos M5 x 35 mm 102 sirven como
contrapeso y pueden enroscarse en las puntas de las palas
del rotor auxiliar 51. Para que el en próximo paso pueda
instalarse la barra estabilizadora, deje uno de ellos sin apretar
del todo.
Img. MR-07
El rotor auxiliar se coloca sobre el balancín y la varilla del
estabilizador 40 , insertándolo a través del hueco existente
para crear una unión al cabezal del rotor. Utilice una varilla
delgada, o algo similar, p ara insertar la varilla del estabilizador
a tope. A continuación, apriete el tornillo M5 x 35 que había
dejado sin apretar. Una la varilla de mando 56 con el rotor
auxiliar.
Img. MR-08
3.4 Instalación del eje del rotor principal
Img. MR-09 & -10
El eje del rotor principal 31 se introduce, desde abajo, en el
buje del rotor 57.
Para ello, la muesca que hace de tope en el buje del rotor,
debe apuntar hacia arriba. Ahora mire a través del agujero del
buje del rotor y coloque el eje del tal manera que, el tornillo
M3 x 12 mm 99 pueda introducirse sin obstáculo alguno. Entre
la cabeza de los tornillos y el buje del rotor, coloque una
arandela Ø 6 x Ø 3,2 x 0,3 mm 105: Use la tuerca autoblocante
M3114 para apretar el tornillo.
4 Montaje del rotor de cola
4.1 Eje del rotor de cola
Img. TR-01
Consultando las medidas de la ilustración, inserte el piñón
cónico del eje del rotor de cola 75 en el eje del rotor 28.
4.2 Instalación de la carcasa del rotor de cola
Imgs. TR-02 & TR-03
En el siguiente paso, coloque el rodamiento Ø 11 x Ø 5 x 4
mm 117 en la carcasa del rotor de cola 81, al lado derecho.
Desde la izquierda, introduzca el eje del rotor de cola con el
piñón cónico en su muesca, a través del rodamiento que instaló
antes, e instale el rodamiento Ø 13 x Ø 7 x 4 mm 116 desde
el lado izquierdo.
4.3 Instalación del rotor de cola
Img. TR-04, -05 & -06
Inserte la pieza central del rotor de cola 84 entre los porta
palas( preformados) de las dos palas del rotor de cola 80
añadiendo ambas arandelas Ø 6 Ø 3 x 0,3 mm 106.Asegúrese
de que las palas del rotor de cola queden montadas alrededor
de manera correcta. Visto desde la izquierda, el rotor de cola
gira en el sentido de las agujas del reloj.
59
Page 60

Use los dos pasadores roscados M3 x 16 mm. 109 para unir
los componentes.
A continuación montará la araña de control 83. Esta, por sus
extremos, se fijará con pasadores en los porta palas
preformados del rotor de cola. Para ello, use los dos pasadores
cilíndricos Ø 1,5 x 20 mm 111.
Img. TR-07
Ahora, introduzca el rotor de cola que ha montado en el eje
del rotor de cola hasta que la pieza central del rotor de cola se
fije en el rodamiento izquierdo 116. Apriete el prisionero 109
hasta que el rotor de cola quede seguro y bien asentado sobre
el eje.
apriete23. Preste atención al correcto alineado de los agujeros
al montarlo. En ambos lados se enroscará, sin apretar por
ahora, un prisionero M4 x 4mm. 110
5.2 Preinstalación del tubo de cola
Img. TB-02
Inserte el casquillo cojinete central 67 en el eje de cola 34. El
casquillo debe introducirse desde los extremos del tubo de
cola 29 hasta los 140 mm. Lo mejor para hacer esto es cortar
un tubo de 140 mm. de longitud (no incluido en el kit) para que
le permita empujar el casquillo, de manera que al insertarlo
desde cualquier extremo del tubo de cola quede exactamente
a esa distancia.
4.4 Bloqueo del eje del rotor de cola
Img. TR-08
Ahora, introduzca el collarín 26 en el eje del rotor de cola,
desde la derecha. No debe quedar ninguna holgura axial. Una
vez comprobado, fije el collarín utilizando los dos prisioneros
M3 x 4mm. 107 , aplicando un poco de laca fija tornillos.
4.5 Montaje del control de cola
Img. TR-09
Para empezar, desde la parte interior y a través del agujero
central de la araña de control, introduzca el cojinete de la
araña de control 27 hasta el tope. Desde el otro lado, introduzca
ahora el collarín de la araña 24 y fíjelo con el prisionero M3 x
3 mm. 107, asegurando el prisionero con laca fija tornillos.
Asegúrese de que la araña de control pueda girar sin
demasiada resistencia sobre el cojinete de la araña. Ahora,
introduzca la varilla del rotor de cola 37, desde la derecha, a
través del eje del rotor. Frote la varilla con grasa para que el
sistema trabaje con el menor rozamiento.
4.6 Instalar la escuadra de mando de cola
Img. TR-10
Con el tornillo M2 x 10 mm. 96 y su arandela correspondiente
Ø 5 x Ø 2,2 x 0,3 mm. 104 se instalará la escuadra de mando
de cola 82. Enganche la parte doblada de la varilla del rotor de
cola en el agujero del brazo más corto. Compruebe aquí
también la facilidad de movimiento con la menor holgura
posible.
4.7 Protector del rotor de cola
Img. TR-11
Introduzca la varilla del estabilizador vertical 39 en los agujeros
de la carcasa del rotor de cola 81 y fíjela con un poco de
cianocrilato.
A continuación, coloque los cojinetes de tope 68 en los
extremos del tubo de cola.
Img. TB-03
En el siguiente paso, coloque el piñón delantero del eje de
cola 73 en el extremo del tubo en el que el taladro en el tubo
de cola está retirado 41 mm. del extremo. El agujero trasero
tiene una separación de solo 20,5mm. desde el borde. Aquí
se fijará el piñón trasero del eje de cola 74. Entre los piñones
y los cojinetes de tope se colocarán las arandelas 118. Coloque
los prisioneros 110 en los piñones usando laca fija tornillos y
apriételos firmemente contra el eje del rotor de cola. Vuelva a
comprobar la facilidad de movimiento y que la holgura del eje
sea la menor posible.
Img. TB-04 & -05
6 Montaje final
6.1 Instalación del piñón de ataque
Encaje la pieza hexagonal 25 contra el piñón de ataque 73.
Compruebe que las roscas quedan a la altura de las aberturas
para los dos prisioneros M4 x 6 mm 108 y apriételos un poco.
Img. AS-01.
6.2 Eje del rotor principal - Montaje
Prepare dos collarines 26, en los que atornillará dos prisioneros
M3 x 3 mm. 107.
Img. AS-02
Encaje ahora el primer collarín 26 , con el cuello hacia abajo,
en el rodamiento 117 y coloque las piezas unidas en el hueco
semicircular del centro de la mecánica.
Img. AS-03
4.8 Inspección del montaje final
Img. TR-12
Compruebe, una vez que la cola esté mecánicamente lista, si
las piezas están correctamente montadas según la ilustración.
Preste atención a que los componentes formen el ángulo
adecuado entre sí, que el sentido de giro del rotor de cola sea
correcto y que el conjunto pueda moverse con facilidad.
Para comprobar el funcionamiento, mueva la escuadra de
mando por su brazo largo, en el que se enganchará más tarde
la transmisión de cola.
5 Montaje del tubo de cola
5.1 Preinstalación del piñón cónico del eje de cola
Img. TB-01
En cada uno de los dos piñones cónicos del eje del rotor de
cola (delantero 73 y trasero 74) se insertará un casquillo de
60
Introduzca el cuello del segundo collarín 26, desde abajo, a
través del rodamiento superior y coloque el piñón de ataque
sobre el collarín en el centro de la mecánica. Desplace hacia
abajo el cabezal del rotor hacia abajo, hasta que el eje del
rotor principal sea visible por la parte inferior del motor .
Img. AS-04
Enganche los porta rótulas del cabezal del rotor en el cíclico
superior.
Img. AS-05
Apriete ahora los prisioneros de los collarines y de la cogida
del motor M3 x 3 mm utilizando laca fija tornillos para
asegurarlos. Los prisioneros del piñón de ataque se apretarán
más tarde.
Abb. AS-06
Page 61

6.3 instalar el soporte del tubo de cola
Monte el soporte de cola en el bloque del chasis, de manera
que el piñón del motor de cola engrane en los dientes del
piñón de ataque principal.
Img. AS-07
Mediante el tornillo M2 x 6 95 se fijará el tubo de cola y se
asegurará en sentido longitudinal. Se enrosca desde el lado
derecho.
Img. AS-08
Con los tornillos M 2,5 x 16 (4x 98) y M 2,5 x 12 (1x 97) se fija
la pinza del tubo de cola 71 y también se aprieta el tubo de
cola.
El juego de los engranajes del piñón de ataque y de cola debe
ajustarse para que el piñón de ataque pueda desplazarse en
altura. Compruebe también que se pueda mover sin dificultad.
Truco: Para ajustar la holgura correcta de los engranajes,
coloque un poco de papel secante entre los dientes del piñón
de ataque. Después, apriete el prisionero del piñón de ataque
y retire el papel.
Vuelva a utilizar laca fija tornillos.
Img. AS-09
42L y 42R las guías del fuselaje 43L y 43R. Debe pegar también
los estabilizadores horizontales 44L y 44R.
Img. AS-14
Deberá usar una cuchilla afilada para retirar el puentecillo de
la mitad izquierda del fuselaje, por debajo del acceso a la
carcasa de la cola.
Img. AS-15
Las mitades del estabilizador vertical 45L y 45R solo se pegan
con la carcasa del rotor de cola, sin embargo no se pegan
después con las mitades traseras del fuselaje.
Img. AS-16
Las mitades traseras del fuselaje encajan a presión,
lateralmente, sobre los retenes del tubo de cola una vez
colocados.
Img. AS-17
Las mitades delanteras del fuselaje, una vez pegadas, se
insertan sobre los carriles preformados del chasis. Para volver
a retirar la parte delantera del fuselaje, presione desde abajo
sobre el bloqueo de la cabina y tire del fuselaje hacia delante.
Img. AS-18
6.4 Instalar el rotor de cola
Inserte los retenes de de cola, delantero 66 y trasero 65, en el
tubo de cola de manera que los agujeritos queden hacia abajo.
Encaje el tubo de cola premontado en el chasis de la cola. El
agujero (20,5 mm. de distancia al extremo del tubo) debe
quedar a la misma altura que el agujero correspondiente del
chasis de la cola. Con el tornillo M2 x 10 96 fije el chasis de la
cola al tubo de cola. El tornillo M2 x 6 95 asegura que no se
produzcan deslizamientos en el eje longitudinal.
Img. AS-10
Para controlar el rotor de cola, una la escuadra de mando con
el servo, en el que montará la varilla de cola 33. Hágalo desde
atrás, a través de los dos retenes de la cola. Introduzca la
varilla también a través de los kardan del brazo del servo de
cola. No lo apriete todavía. La parte curva de la varilla se
engancha, desde arriba, en la escuadra de mando. Coloque el
rotor de cola en su posición neutra (de reposo). Ahora, ajuste
su servo de cola de manera que en el punto neutro el brazo
del servo quede 10º hacia la izquierda - mirando el helicóptero
desde el lado izquierdo.
Apriete ahora los prisioneros de los kardan con laca fija tornillos.
Img. AS-11
9 Centro de gravedad
El centro de gravedad debe quedar bajo el eje del rotor principal
para el vuelo en estacionario. Para vuelo en traslación le
recomendamos un centro de gravedad más hacia el morro. El
centro de gravedad se ve afectado por la ubicación de la batería.
Img. CG (Eninicio rápido)
7 Palas del rotor principal
Con los cuatro prisioneros M3 x 16 mm. 109 se fijan las palas
del rotor principal 50 a los porta palas.
Img. AS-12
8 Montaje del fuselaje
Pegue las mitades delanteras del fuselaje 41L y 41R y pegue
también el bloqueo de la cabina 90 en las muescas provistas
para tal fin, También deben pegarse los cristales (86,87, 88 y
89).
Img. AS-13
Pegue en la parte interior de las mitades traseras del fuselaje
61
Page 62

626364
Page 63

Page 64

MUL TIPLEX Modellsport GmbH & Co.KG Westliche Gewerbestrasse 1 D-75015 Bretten-Gölshausen www.multiplex-rc.de
 Loading...
Loading...