

Hitachi L200-002NFE2, L200-004NFE2, L200-002NFEF2, L200-002NFU2, L200-004NFEF2 Quick Reference Manual
...
• Single-phase Input 200V Class
• Three-phase Input 200V Class
• Three-phase Input 400V Class
Manual No. NB6751X • Sept. 2006
Hitachi Industrial Equipment Systems Co., Ltd.
L2002 Series Inverter
Quick Reference Guide


1
Caution: Be sure to read the L2002 Inverter Manual and follow
its Cautions and Warnings for the initial product installation.
This Quick Reference Guide is intended for reference use by
experienced users in servicing existing installations.
UL® Cautions, Warnings, and Instructions
Wiring Warnings for Electrical Practices and Wire Sizes
The Cautions, Warnings, and instructions in this section summarize the
procedures necessary to ensure an inverter installation complies with
Underwriters Laboratories
®
guidelines.
Warnin g : “Use 60/75°C Cu wire only” or equivalent.
Warnin g : “Open Type Equipment.”
Warnin g : “Suitable for use on a circuit capable of delivering
not more than 100,000 rms symmetrical amperes, 240 V
maximum.” For models with suffix N or L.
Warnin g : “Suitable for use on a circuit capable of delivering
not more than 100,000 rms symmetrical amperes, 480 V
maximum.” For models with suffix H.
Warnin g : “Hot surface—risk of burn.”
Warnin g : “Install device in pollution degree 2 environment.”
Warnin g : “Maximum Surrounding Air Temperature 50°C.”
Warnin g : “Risk of electric shock—capacitor discharge time is at
least 5 minutes.”
Warnin g : “Solid state motor overload protection is provided in
each model.”
Warnin g : “Tightening torque and wire range for field wiring
terminals are marked adjacent to the terminal or on the wiring
diagram.”

2
Terminal Tightening Torque and Wire Size
The wire size range and tightening torque for field wiring terminals are
presented in the tables below.
200V Models
Motor output
Inverter Model
Wire Size
(AWG)
Torque
kW HP ft-lbs (N-m)
0.2 1/4 –002NFE(F)2/NFU2
16 0.6 0.80.4 1/2 –004NFE(F)2/NFU2
0.55 3/4 –005NFE(F)2
0.75 1 –007NFE(F)2/NFU2
14
0.9 1.2
1.1 1 1/2 –011NFE(F)2
1.5 2 –015NFE(F)2/NFU2 12
2.2 3 –022NFE(F)2/NFU2 10
3.7 5 –037LFU2 12
5.5 7 1/2 –055LFU2 10
1.5 2.0
7.5 10 –075LFU2 8
400V Models
Motor output
Inverter Model
Wire Size
(AWG)
Torque
kW HP ft-lbs (N-m)
0.4 1/2 –004HFE(F)2/HFU2
16
0.9 1.2
0.75 1 –007HFE(F)2/HFU2
1.5 2 –015HFE(F)2/HFU2
2.2 3 –022HFE(F)2/HFU2
3.0 4 –030HFE(F)2 14
4.0 5 –040HFE(F)2/HFU2
5.5 7 1/2 –055HFE(F)2/HFU2 12 1.5 2.0
7.5 10 –075HFE(F)2/HFU2

3
Wire Connectors
Warnin g : Field wiring connections
must be made by a UL Listed and CSA
Certified ring lug terminal connector
sized for the wire gauge being used.
The connector must be fixed using the
crimping tool specified by the connector manufacturer.
Fuse and Circuit Breaker Sizes
The inverter’s input power wiring must include UL Listed, dual-element,
600V fuses, or UL Listed, inverse-time, 600V circuit breakers.
Terminal Connector
Wire Size
Range
(AWG)
Torque Range
ft-lbs (N-m)
Logic/Analog connector 30—16 0.16—0.19 0.22—0.25
Relay connector 30—14 0.37—0.44 0.5—0.6
200V Models
Motor output
Inverter Model
Ampere Rating for
Fuse or Breaker
kW HP
0.2 1/4 –002NFE(F)2/NFU2 10
0.4 1/2 –004NFE(F)2/NFU2 10
0.55 3/4 –005NFE(F)2 10
0.75 1 –007NFE(F)2/NFU2 15
1.1 1 1/2 –011NFE(F)2 15
1.5 2 –015NFE(F)2/NFU2 20 (single ph.)
15 (three ph.)
2.2 3 –022NFE(F)2/NFU2 30 (single ph.)
20 (three ph.)
3.7 5 –037LFU2 30
5.5 7 1/2 –055LFU2 40
7.5 10 –075LFU2 50
Terminal (ring lug)
Cable support
Cable
4
Motor Overload Protection
Hitachi L2002 inverters provide solid state motor overload protection,
which depends on the proper setting of the following parameters:
• B012 “electronic overload protection”
• B212 “electronic overload protection, 2nd motor”
Set the rated current [Amperes] of the motor(s) with the above parameters. The setting range is 0.2 * rated current to 1.2 * rated current.
Warning : When two or more motors are connected to the
inverter, they cannot be protected by the electronic overload protection. Install an external thermal relay on each motor.
400V Models
Motor output
Inverter Model
Ampere Rating for
Fuse or Breaker
kW HP
0.4 1/2 –004HFE(F)2/HFU2 3
0.75 1 –007HFE(F)2/HFU2 6
1.5 2 –015HFE(F)2/HFU2 10
2.2 3 –022HFE(F)2/HFU2 10
3.0 4 –030HFE(F)2 15
4.0 5 –040HFE(F)2/HFU2 15
5.5 7 1/2 –055HFE(F)2/HFU2 20
7.5 10 –075HFE(F)2/HFU2 25

5
Power Circuit Terminals
Inverter models L200–002NFE(F)2/NFU2, –004NFE(F)2/
NFU2, –005NFE(F)2
Jumper
+1
+ –
U/T1
V/T2
W/T3
Chassis
Ground
Inverter models L200–007NFE(F)2/NFU2 to –022NFE(F)2/
NFU2, –037LFU2, –004HFE(F)2/HFU2 to –040HFE(F)2/
HFU2
Inverter models L200–055LFU2,, –055HFE2/HFU2,
–075LFU2, –075HFE2/HFU2
L1 L2 N/L3
Jumper
+ –
U/T1 V/T2 W/T3
Chassis
Ground
+1
L1 L2 N/L3
R/L1 S/L2 T/L3
NFE(F)2,
NFU2
LFU2,
HFE(F)2,
HFU2
U/T1 V/T2 W/T3
Jumper
P/+ N/–
PD/+1
Chassis
Ground
U/T1R/L1 S/L2 T/L3 V/T2 W/T3

6
Control Circuit Terminals
Ter mina l
Name
Description Ratings and Notes
PCS +24V for logic inputs 24VDC supply, 30 mA max.
(Notes: Do not use for network
power
Do not short to terminal L)
1, 2, 3, 4, 5Intelligent (program-
mable) discrete logic
inputs
27VDC max. (use P24 or an
external supply referenced to
terminal L), 4.7kΩ input
impedance
Inverter models L200–HFEF2, –075HFEF2
Jumper
+ –
+1
Chassis
Ground
U/T1 V/T2 W/T3L1 L2 L3
H O OI
PCS
L
Analog
inputs
Analog
output
Alarm relay
Logic
outputs
Logic inputs
L 5 4 3 2 1
CM2
12 11
AL2 AL1 AL0
AM

7
L (right) GND for logic inputs Sum of input 1 to 5 currents
(Note: Do not ground)
11, 12 Discrete logic outputs 50 mA max. ON current,
27 VDC max. OFF voltage
CM2 GND for logic outputs 100 mA max for sum of
terminals 11 and 12 currents
AM Analog voltage output 0 to 10VDC, 1 mA max., 50%
duty cycle
L (left) GND for analog signals Sum of OI, O, H, and AM
currents (return)
OI Analog input, current 4 to 19.6 mA range, 20 mA
nominal
O Analog input, voltage 0 to 9.6 VDC range, 10VDC
nominal, 12VDC max., input
impedance 10 kΩ
H +10V analog reference 10VDC nominal, 10 mA max.
AL0 Relay common contact
Contact rating
Max resistive load = 250VAC,
2.5A; 30VDC 3A;
Max inductive load = 250VAC,
0.2A; 30VDC 0.7A
Minimum load = 5VDC 100mA,
100VAC 10mA
AL1 Relay contact, normally
closed during RUN
AL2 Relay contact, normally
open during RUN
Terminal
Name
Description Ratings and Notes

8
Basic Wiring Diagram
The following wiring diagram shows the power and motor connections
for basic operation. The optional signal input wiring supports external
Fwd and Rev Run command, and a speed potentiometer.
(L1)
R
(L2)
S
(N/L3)
T
(T2)
V
(T3)
W
(T1)
U
Motor
Forward
L
O
H
Reverse
Relay contacts,
1 Form C
Run signal
Frequency
arrival signal
Open collector
outputs:
External
speed
reference
pot.
L200
From 3-phase
power input
source (See
specifications
label on inverter
for details)
Load
Load
Analog reference
PCS
2
1
CM2
12
11
AL0
AL1
AL2
Inputs:
L
GND for logic inputs
GND for logic
outputs
GND for analog signals
9
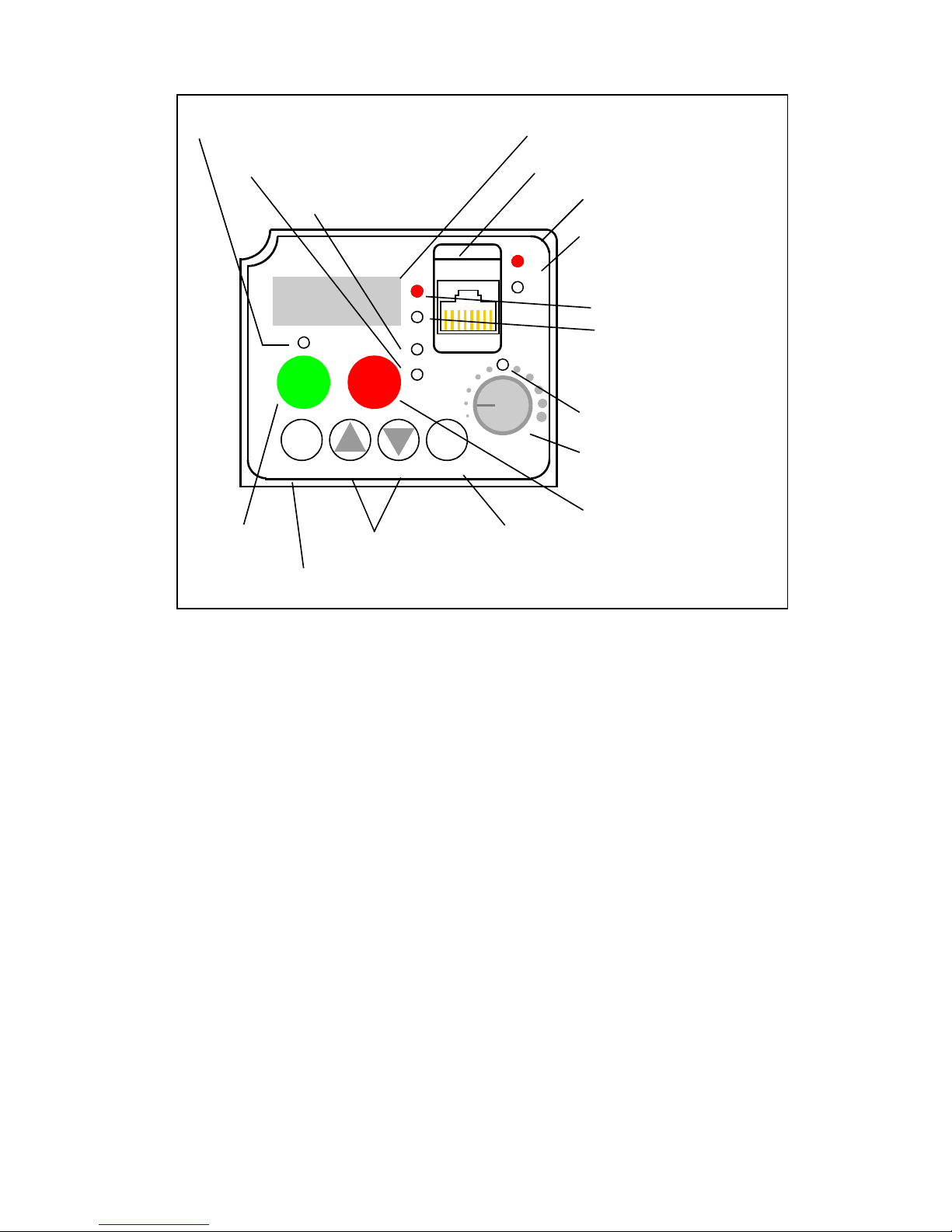
Inverter Keypad Operation
• Run/Stop LED – ON when the inverter output is ON and the motor is
developing torque, and OFF when the inverter output is OFF (Stop
Mode).
• Program/Monitor LED – ON when the inverter is ready for parame-
ter editing (Program Mode). It is OFF when the parameter display is
monitoring data (Monitor Mode).
• Run Key Enable LED – ON when the inverter is ready to respond to
the Run key, OFF when the Run key is disabled.
• Run Key – Press this key to run the motor (the Run Enable LED must
be ON first). Parameter F004, Keypad Run Key Routing, determines
whether the Run key generates a Run FWD or Run REV command.
• Stop/Reset Key – Press this key to stop the motor when it is running
(uses the programmed deceleration rate). This key will also reset an
alarm which has tripped.
• Potentiometer – Allows an operator to directly set the motor speed
when the potentiometer is enabled for output frequency control.
• Potentiometer Enable LED – ON when the potentiometer is enabled
for value entry.
(continued, next page...)
1
2
50.0
Parameter Display
Run/Stop LED
Program/Monitor LED
Run Key Enable LED
Run Key
Power LED
Display Units LEDs
Hertz
Amperes
Potentiometer
Enable LED
Potentiometer
Stop/Reset Key
Function Key
Up/Down Keys
Store Key
Alarm LED
Serial Port
RUN
STOP
RESET
FUNC.
STR
HITACHI
POWER
ALARM
RUN
A
Hz
PRG

10
• Parameter Display – A 4-digit, 7-segment display for parameters and
function codes.
• Display Units: Hertz/Amperes – One of these LEDs will be ON to
indicate the units associated with the parameter display.
• Power LED – ON when the power input to the inverter is ON.
• Alarm LED – ON when the inverter in Trip Mode.
• Function Key – This key is used to navigate through the lists of
parameters and functions for setting and monitoring parameter values.
• Up/Down Keys – Use these keys alternately to move up or down the
lists of parameter and functions shown in the display, and to increment/
decrement values.
• Store Key – When the unit is in Program Mode and the operator has
edited a parameter value, press the Store key to write the new value to
the EEPROM.

11
Keypad Navigation Map
H006
H003
1
2
C1 49
C001
1
2
b
151
b
001
1
2
A1 55
A001
1
2
1
2
1
2
1
2
H- - -
1
2
C- - -
1
2
b
---
1
2
A- - -
F004
F001
1
2
d
083
d
001
1
2
0.0
1 2 3.4
Edit
1
2
Increment/
decrement
value
Write data
to
EEPROM
Display data
Monitor Mode Program Mode
1
2
1
2
Return to
parameter list
Select Parameter Edit Parameter
Store as
powerup
default
powerdown
FUNC.
FUNC.
FUNC.
FUNC.
STR
FUNC.

12
Powerup Test
The Powerup Test procedure uses minimal parameter settings to run the
motor. The procedure describes two alternative methods for commanding
the inverter: via the inverter keypad, or via the logic terminals.
• Check power input and motor output wiring (see page 8 diagram).
• If using logic terminals for testing, verify correct wiring on [PCS],
[FW], [H], [O], and [L] (bottom row) per the diagram on page 8.
• Reverse [RV] input wiring (defaults to terminal [2]) is optional.
Step Description Via Keypad
Via Logic
Ter mina ls
1 Set speed command
source setting
A001 = 00
(keypad pot.)
A001 = 01,
[H–O–L] input
2 Set Run FW command
source
A002 = 02
(Run key)
A002 = 01,
[FW] input
3 Set Run REV command
source
— C002 = 01,
[RV] input
4 Set motor base freq. A003 = 60
5 Set motor poles
(2 / 4 / 6 / 8)
H004 = 4 (default), change only if
your motor is different
6 Set keypad display to
monitor freq.
Access D001, press Func. key, display
will show
0.0
Perform safety check Disconnect load from motor
7 Turn keypad pot.
to MIN position
Ensure voltage on
[O]—[L] terminals= 0V
8 Run Forward command Press Run key Turn ON the
[FW] terminal
9 Increase speed Rotate keypad
pot. CW dir.
Increase voltage
at [O]
10 Decrease speed Rotate keypad
pot. CCW dir.
Decrease voltage
at [O]
11 Stop motor Press Stop key Turn OFF the
[FW] terminal
12 Run Reverse command
(optional)
— Turn ON the [RV]
terminal
13 Stop motor — Turn OFF the
[RV] terminal

13
Error Codes
The L2002 series inverters will trip on over-current, over-voltage, and
under-voltage to protect the inverter. The motor output turns OFF, allowing the motor to free-run to a stop. Press the Stop/Reset key to reset the
inverter and clear the error.
Basic Error Codes
Error
Code
Name Probable Cause(s)
E01
Over current event while at
constant speed
• Inverter output was short-circuited
• Motor shaft is locked
• Load is too heavy
• A dual-voltage motor is wired
incorrectly
Note: The L200
2 will over current trip at
nominally 200% of rated current
E02
Over current event during
deceleration
E03
Over current event during
acceleration
E04
Over current event for other
conditions
• DC braking power(A054) set too high
• Current transformer / noise error
E05
Overload protection • Motor overload is detected by the
electronic thermal function
E07
Over voltage protection • DC bus voltage exceeds a threshold,
due to regenerative energy from motor
E08
EEPROM error • Built-in EEPROM memory experi-
enced noise, high temperature, etc.
E09
Under-voltage error • DC bus voltage decreased enough to
cause a control circuit fault
E11
E22
CPU error • Built-in CPU had internal error
E12
External trip • [EXT] input signal detected
E13
USP (Unattended Start
Protection)
• When (USP) was enabled, an error
occurred when power was applied while
a Run signal was present
E14
Ground fault • A ground fault was detected between
the inverter output and the motor. This
feature protects the inverter, and does not
protect humans.
E15
Input over-voltage • Input voltage was higher than specified
value, after 60 sec. in Stop Mode
E21
Inverter thermal trip • Inverter internal temperature is above
the threshold
E30
Driver error • Inverter internal error, electrical noise
at CPU-to-drive circuit interface.

14
Error Trip Conditions
Use function code D081 to access the error trip conditions for the current
error as shown in the table below. Use the Up and Down arrow keys to
scroll through the trip condition parameters.
E35
Thermistor • Thermistor input, [THM] and [L], is
over the temp. threshold
E60
Communications error • The inverter’s watchdog timer for the
communications network has timed out.
---
Under-voltage (brownout)
with output shutoff
• Low input voltage caused the inverter
to turn OFF the motor output and try to
restart. If unsuccessful, a trip occurs.
Step Display
1. Access D081
d
081
2. Press Function Key If no error:
_ _ _
If error exists:
EXX
(error code)
3. Press Up/Dn key (if
error exists)
Output frequency at trip point:
10.0
Motor current at trip point:
2.5
DC bus voltage at trip point:
284.0
Cumulative Run time house at trip
point:
15
Cumulation power-ON hours at
trip point:
18
Error
Code
Name Probable Cause(s)
1
2

15
Restoring Factory Default Settings
Note: After initializing the inverter, use the Powerup Test on
page 12 to get the motor running again.
Action Display Function/Parameter
Press , or as
needed.
b
---
“B” Group selected
Press .
b
001
First “B” Group parameter
Press/hold until...
b
085
Country code for
initialization selected
Press . If setting is
correct, then skip next step.
02
00 = Japan
01 = Europe
02 = USA
To change country code, press
or to set; to store.
Press .
b
085
Country code for
initialization selected
Press .
b
084
Initialization function
selected
Press .
00
00 = disable initialization,
clear trip history only
Press .
01
01 = enable initialization
Press .
b
084
Initialization now enabled
to restore all defaults
Press/hold and
keys. Do not release yet.
b
084
First part of key sequence
Press and hold the key
for 3 seconds and then release.
d
000
Final part of key sequence;
display is blinking
After the display “D000” is
blinking, only then release all
the keys.
EU
USA
Default parameter country
code shown during initialization
Initialization is complete.
d
001
Function code for output
frequency monitor shown
FUNC.
1
2
FUNC.
1
FUNC.
1
2
STR
FUNC.
2
FUNC.
1
STR
FUNC.
2
STOP
RESET

16
Parameter Tables
“D” Group: Monitoring Functions
Func.
Code
Name / Description Units
D001 Output frequency monitor Hz
D002 Output current monitor A
D003 Rotation direction monitor —
D004 Process variable (PV), PID feedback monitor %
D005 Intelligent input terminal status —
D006 Intelligent output terminal status —
D007 Scaled output frequency monitor
(output frequency x B086 scale factor)
User-
defined
D013 Output voltage monitor V
D016 Cumulative operation RUN tim monitor hours
D017 Cumulative power-on time monitor hours
Direction
Forward
Stop Reverse
2 1435
Terminal Numbers
ON
OFF
12 11AL
Terminal Numbers
ON
OFF

17
Trip History and Inverter Status
Func.
Code
Name / Description Units
D080 Trip Counter Hz
D081 Trip monitor 1 (most recent trip n) —
D082 Trip monitor 2 (trip n-1) —
D083 Trip monitor 3 (trip n-2) —
E07
60.0
1
2
4.0
398.0
1
2
1
2
d
083
1
2
0.0
Display data
Monitor Mode
1
2
d
081
No
Error code
Output frequency
at trip point
Motor current
at trip point
DC bus voltage
at trip point
Ye s
No error
1
2
Error
exists?
Cumulative
inverter operation
time at trip point
1
2
15
1
2
18
Cumulative powerON time at trip
point
Trip conditions
1
2
FUNC.
FUNC.
FUNC.

18
Parameter tables for user-settable functions follow these conventions:
• Some parameters have 2nd motor equivalents, indicated by the x2xx
parameter codes in the left-most column.
• Some parameters specify an option code. Where applicable, the
options codes will be in a bulleted list in the Name/Description
column.
• The default values apply to all models unless otherwise noted for each
parameter... –FE(F) (Europe) / – FU (U.S.)
• Some parameters cannot be edited during Run Mode, and certain
Software Lock settings (B031) can prohibit all edits. If in doubt, place
the inverter in Stop Mode or consult the inverter manual for details.
“F” Group: Main Profile Parameters
“A” Group: Standard Functions
Func.
Code
Name / Description
Default
Va lu e
Set
Va lu e
F001 Output frequency setting 0.0
F002 Acceleration (1) time setting 10.0
F202 Acceleration (1) time setting, 2nd motor 10.0
F003 Deceleration (1) time setting 10.0
F203 Deceleration (1) time setting, 2nd motor 10.0
F004 Keypad Run key routing
•00Forward •01Reverse
00
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e
A001/
A201
Frequency source setting
• 00 Keypad potentiometer
• 01 Control terminal
• 02 Function F001 setting
• 03 ModBus network input
• 10 Calculate function input
01 / 00
A002/
A202
Run command source setting
• 01 Input terminal FW or RV (assignable)
• 02 Run key on keypad, or digital operator
• 03 ModBus network input
01 / 02

19
A003/
A203
Base frequency setting 50.0 / 60.0
A004/
A204
Maximum frequency setting 50.0 / 60.0
A005 [AT] selection
• 00 Select between [O] and [OI] at [AT]
• 01 [O]+[OI] ([AT] input is ignored)
• 02 Select between [O] and keypad pot
• 03 Select between [OI] and keypad pot
00
A011 Pot./O–L input active range start frequency 0.0
A012 Pot./O–L input active range end frequency 0.0
A013 Pot./O–L input active range start voltage 0.
A014 Pot./O–L input active range end voltage 100.
A015 Pot./O–L input start frequency enable
• 00 Use A011 starting value)
• 01 Use 0 Hz
01
A016 External frequency filter time constant 2. / 8.
A020/
A220
Multi-speed frequency setting 0
A021
A022
A023
A024
A025
A026
A027..
..A035
Multi-speed frequency settings (for both motors) 0.0 / 0.0
0.0 / 0.0
0.0 / 0.0
0.0 / 0.0
0.0 / 0.0
0.0 / 0.0
......
0.0 / 0.0
A038 Jog frequency setting 1.00
A039 Jog stop mode
• 00 Free-run stop, jogging disabled during
motor run
• 01 Controlled deceleration, jogging disabled
during motor run
• 02 DC braking to stop, jogging disabled
during motor run
00
A041/
A241
Torque boost select
• 00 Manual torque boost
• 01 Automatic torque boost
00
A042/
A242
Manual torque boost value 5.0(A042)/
0.0 (A242)
A043/
A243
Manual torque boost frequency adjustment 3.0/(A043)
0.0(A243)
Func.
Code
Name / Description
Default
Val ue
–FE(F)/–FU
Set
Val ue

20
A044/
A244
V/f characteristic curve selection
• 00 V/f constant torque
• 01 V/f variable torque
00
A045/
A245
V/f gain setting 100.
A051 DC braking enable
• 00 Disable • 01 Enable
00
A052 DC braking frequency setting 0.5
A053 DC braking wait time 0.0
A054 DC braking force during deceleration 0.
A055 DC braking time for deceleration 0.0
A056 DC braking / edge or level detection for [DB]
input
01
A061/
A261
Frequency upper limit setting 0.0
A062/
A262
Frequency lower limit setting 0.0
A063
A065
A067
Jump (center) frequency setting 0.0
A064
A066
A068
Jump (hysteresis) frequency width setting 0.5
A071 PID Enable
• 00 PID operation OFF
• 01 PID operation ON
00
A072 PID proportional gain 1.0
A073 PID integral time constant 1.0
A074 PID derivative time constant 0.0
A075 PV scale conversion 1.00
A076 PV source setting
• 00 [OI] terminal (current input)
• 01 [O] terminal (voltage input)
• 02 ModBus network
• 03 Calculate function output
00
A077 Reverse PID action
• 00 PID input = SP – PV
• 01 PID input = –(SP – PV)
00
A078 PID output limit 0.0
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e

21
A081 AVR function select
• 00 AVR enabled • 01 AVR disabled
• 02 AVR enabled except during decel
00
A082 AVR voltage select 230 / 230
400 / 460
A092/
A292
Acceleration (2) time setting 15.0
A093/
A293
Deceleration (2) time setting 15.0
A094/
A294
Select method to switch to Acc2/Dec2 profile
• 00 2CH input from terminal
• 01 transition frequency
00
A095/
A295
Acc1 to Acc2 frequency transition point 0.0
A096/
A296
Dec1 to Dec2 frequency transition point 0.0
A097 Acceleration curve selection
• 00 Linear • 01 S-curve
00
A098 Deceleration curve selection
• 00 Linear • 01 S-curve
00
A101 [OI]–[L] input active range start frequency 0.0
A102 [OI]–[L] input active range end frequency 0.0
A103 [OI]–[L] input active range start current 0.0
A104 [OI]–[L] input active range end current 100.
A105 [OI]–[L] input start frequency enable 01
A141 A input select for calculate function
• 00 Digital operator
• 01 Keypad potentiometer
• 02 [O] input
• 03 [OI] input
• 04 Network variable
02
A142 B input select for calculate function
• 00 Digital operator
• 01 Keypad potentiometer
• 02 [O] input
• 03 [OI] input
• 04 Network variable
03
A143 Calculation symbol
• 00 ADD (A input + B input)
• 01 SUB (A input – B input)
• 02 MUL (A input x B input)
00
A145 ADD frequency 0.0
Func.
Code
Name / Description
Default
Val ue
–FE(F)/–FU
Set
Val ue

22
“B” Group: Fine-tuning Functions
A146 ADD direction select
• 00 Plus (adds A145 value to output frequency)
• 01 Minus (subtracts A145 value from output
frequency)
00
A151 Pot. input active range start frequency 0.0
A152 Pot. input active range end frequency 0.0
A153 Pot. input active range start current 0.0
A154 Pot. input active range end current 0.0
A155 Pot. input start frequency enable 01
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e
B001 Selection of automatic restart mode
• 00 Alarm output after trip, automatic restart
disabled
• 01 Restart at 0Hz
• 02 Resume operation after frequency
matching
• 03 Resume previous freq. after freq. matching,
then decelerate to stop and display trip info
00
B002 Allowable under-voltage power failure time 1.0
B003 Retry wait time before motor restart 1.0
B004 Instantaneous power failure / under-voltage trip
alarm enable
• 00 Disable
• 01 Enable
00
B005 Number of restarts on power failure / under-
voltage trip event
• 00 Restart 16 times
• 01 Always restart
00
B012/
B212
Level of electronic thermal setting Rated
current of
each inverter
B013/
B213
Electronic thermal characteristic
• 00 Reduced torque1 • 01 Const. torque
• 02 Reduced torque2
01
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e

23
B021/
B221
Overload restriction operation mode
•00Disabled
• 01 Enabled for accel and constant speed
• 02 Enabled for constant speed only
01
B022/
B222
Overload restriction setting Rated
current x 1.5
B023/
B223
Deceleration rate at overload restriction 1.0 / 30.0
B031 Software lock mode selection
• 00 Low-level access, [SFT] blocks edits
• 01 Low-level access, [SFT] blocks edits
(except F001 and Multi-speed parameters)
• 02 No access to edits
• 03 No access to edits except F001 and Multispeed parameters
• 03 High-level access, including B031
01
B080 [AM] analog signal gain 100.
B082 Start frequency adjustment 0.5
B083 Carrier frequency setting 5.0
B084 Initialization mode (parameters or trip history)
• 00 Trip history clear
• 01 Parameter initialization
• 02 Trip history clear and parameter
initialization
00
B085 Country code for initialization
• 00 Japan version • 01 Europe version
•02USA version
01 / 02
B086 Frequency scaling conversion factor 1.0
B087 STOP key enable
• 00 Enable • 01 Disable
00
B088 Restart mode after FRS
• 00 Restart from 0Hz
• 01 Restart from frequency detected from
actual speed of motor
00
B089 Monitor display select for networked inverter,
7 options:
• 01 Output frequency monitor
• 02Output current monitor
• 03 Rotation direction monitor
• 04 Process variable (PV), PID feedback
monitor
• 05 Intelligent input terminal status
• 06 Intelligent output terminal status
• 07 Scaled output frequency monitor
01
Func.
Code
Name / Description
Default
Val ue
–FE(F)/–FU
Set
Val ue

24
“C” Group: Intelligent Terminal Functions
B091 Stop mode selection
• 00 DEC (decelerate and stop)
• 01 FRS (free-run to stop)
00
B130 Over-voltage LADSTOP enable
• 00 Disable • 01 Enable
00
B131 Over-voltage LADSTOP level 380 / 760
B150 Carrier mode
• 00 Disable • 01 Enable
00
B151 Quick-start enable
• 00 Disable • 01 Enable
00
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e
C001/
C201
Terminal [1] function Twenty-four option
codes available
(see page 28)
00
C002/
C202
Terminal [2] function 01
C003/
C203
Terminal [3] function 02 / 16
C004/
C204
Terminal [4] function 03 / 13
C005/
C205
Terminal [5] function 18 / 09
C011 Terminal [1] active state • 00 Normally open
[NO]
• 01 Normally
closed [NC]
00
C012 Terminal [2] active state 00
C013 Terminal [3] active state 00
C014 Terminal [4] active state 00 / 01
C015 Terminal [5] active state 00
C021 Terminal [11] function Ten option codes
available
(see page 29)
01
C022 Terminal [12] function 00
C026 Alarm relay terminal
function
05
C028 [AM] signal selection Two option codes
available
(see page 30)
00
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e

25
C031 Terminal [11] active state • 00 Normally open
(NO)
•01Normally
closed (NC)
00
C032 Terminal [12] active state 00
C036 Alarm relay terminal
active state
01
C041 Overload level setting Rated
current of
inverter
C042 Frequency arrival setting for accel 0.0
C043 Arrival frequency setting for decel 0.0
C044 PID deviation level setting 3.0
C052 PID FBV function high limit 100.0
C053 PID FBV function variable low limit 0.0
C071 Communication speed selection
• 04 4800 bps
• 05 9600 bps
• 06 19200 bps
06 / 04
C072 Node allocation 1.
C074 Communication parity selection
• 00 No parity
• 01 Even parity
• 02 Odd parity
00
C075 Communication stop bit selection 1
C076 Communication error select
• 00 Trip (error code E60)
• 01 Decelerate to stop and trip (error code E60)
•02Disable
• 03 Free run stop (coasting)
• 04 Decelerate to a stop
02
C077 Communication error time-out 0.00
C078 Communication wait time 0.
C081 O input span calibration 100.0
C082 OI input span calibration 100.0
C085 Thermistor input tuning 100.0
C086 [AM] terminal offset tuning 0.0
C091 Debug mode enable
• 00 Display • 01 No display
00
Func.
Code
Name / Description
Default
Val ue
–FE(F)/–FU
Set
Val ue

26
C101 Up/Down memory mode selection
• 00 Clear last frequency (return to default
frequency F001)
• 01 Keep last frequency adjusted by UP/DWN
00
C102 Reset selection
• 00 Cancel trip state at input signal ON transition, stops inverter if in Run Mode
• 01 Cancel trip state at signal OFF transition,
stops inverter if in Run Mode
• 02 Cancel trip state at input signal ON transition, no effect if in Run Mode
00
C141 Input A select for logic
output
Nine option codes
available
(LOG excluded),
see page 29
00
C142 Input B select for logic
output
01
C143 Logic function select
• 00 [LOG] = A AND B
• 01 [LOG] = A OR B
• 02 [LOG] = A XOR B
00
C144 Terminal [11] ON delay 0.0
C145 Terminal [11] OFF delay 0.0
C146 Terminal [12] ON delay 0.0
C147 Terminal [12] OFF delay 0.0
C148 Output relay ON delay 0.0
C149 Output relay OFF delay 0.0
Func.
Code
Name / Description
Default
Va lu e
–FE(F)/–FU
Set
Va lu e

27
“H” Group: Motor Constants Functions
“P” Group: Expansion Card Functions
Note: The “P” Group parameters do not appear in the
parameter list shown on the keypad display unless the expansion
card is installed on the inverter.
Func.
Code
Name / Description
Default
Val ue
–FE(F)/–FU
Set
Val ue
H003/
H203
Motor capacity Factory set
H004/
H204
Motor poles setting
• 2 poles • 4 poles
• 6 poles • 8 poles
4
H006/
H206
Motor stabilization constant 100
Func.
Code
Name / Description
Default
Val ue
–FE(F)/–FU
Set
Val ue
P044 Network comm watchdog timer 1.00
P045 Inverter action on network comm error
• Trip (Error E70) • Decel, stop, and trip
• Hold last speed • Free run stop
• Decelerate and stop
01
P046 Polled I/O output instance number
•20 •21
• 100
21
P047 Polled I/O input instance number
•70 •71
• 101
71
P048 Inverter action on network idle mode
• Trip (Error E70) • Decel, stop, and trip
• Hold last speed • Free run stop
• Decelerate and stop
01
P049 Network motor poles setting for RMP 0

28
Intelligent Input Terminal Listing
Symbol Code Input Terminal Name
FW 00 Forward Run/Stop
RV 01 Reverse Run/Stop
CF1 02 Multi-speed select, Bit 0 (LSB)
CF2 03 Multi-speed select, Bit 1
CF3 04 Multi-speed select, Bit 2
CF4 05 Multi-speed select, Bit 3 (LSB)
JG 06 Jogging
DB 07 External DC braking
SET 08 Set (select) second motor data
2CH 09 2-stage accel and decel
FRS 11 Free-run stop
EXT 12 External trip
USP 13 Unattended start protection
SFT 15 Software lock
AT 16 Analog input voltage/current sel.
RS 18 Reset inverter
PTC 19 PTC thermistor thermal protection
STA 20 Start (3-wire interface)
STP 21 Stop (3-wire interface)
F/R 22 FWD, REV (3-wire interface)
PID 23 PID disable
PIDC 24 PID Reset
UP 27 Remote control Up func.
DWN 28 Remote control Down func.
UDC 29 Remote control data clearing
OPE 31 Operator control
ADD 50 Add frequency enable
F-TM 51 Force Terminal Mode
RDY 52 Quick Start Enable
S-ST 53 Special-Set (select) 2nd motor data
— 255 Not selected

29
Intelligent Output Terminal Listing
Analog Input Configuration
The following table shows the parameter settings and [AT] state required
to select various analog input sources.
Symbol Code Input Terminal Name
RUN 00 Run signal
FA1 01 Freq. arrival type 1 – constant speed
FA2 02 Freq. arrival type 2 – over-frequency
OL 03 Overload advance notice signal
OD 04 Output deviation for PID control
AL 05 Alarm signal
Dc 06 Analog input disconnect detect
FBV 07 PID second stage output
NDc 08 Network detection signal
LOG 09 Logic output function
A005 [AT] External Frequency Command Input
00 OFF [O]
ON [OI]
01 (ignored) Sum (O + OI)
02 OFF [O]
ON Keypad potentiometer
03 OFF [OI]
ON Keypad potentiometer

30
Analog Output Function Listing
The following table shows the functions available for assignment to the
analog output terminal via terminal [AM], option set by C028:
Option
Code
Function Name Description
Corresponding
Signal Range
00 Analog freq. monitor Actual motor speed 0 to max. freq. (Hz)
01 Analog current
output monitor
Motor current (% of max.
rated output current)
0 to 200%

31
NOTES:

32
NOTES:
 Loading...
Loading...