

Harmonic Drive SHA, SHA CG, SHA SG, SHA32A, SHA40A Series Manual
...
ISO14001
(Hotaka plant)
ISO9001
AC Servo Actuator
SHA SG and CG series manual
Introduction
Introduction
Thank you for purchasing our SHA series AC Servo Actuator.
• Improper handling or use of this product may result in an accident or reduced
life of the product. Read this document carefully and use the product correctly
so that the product can be used safely for many years to come.
• Product specifications are subject to change without notice.
• Keep this manual in a convenient location and refer to it as necessary when
operating or maintaining the actuator.
• The end user of the actuator should have a copy of this manual.
SAFETY GUIDE
Indicates a potentiall y hazardous situation, which, if not avoided, could result
Indicates a potentially hazardous situation, which, if not avoided, may result in
Indicates what should b e performed or avoided to prevent non-opera tion or
Space equipment
Apparatus or devices used in special environments
WARNING
CAUTION
CAUTION
SAFETY GUIDE
To use this actuator safely and correctly, be sure to read SAFETY GUIDE and other parts of this
manual carefully. It is im portant to fully understand the information pro vided herein before using the
actuator.
NOTATION
Important safety information you must note is provided herein. Be sure to observe these instructions.
in death or serious personal injury.
minor or moderate personal injury and/or damage to the equipment.
LIMIT ATION OF APPLICATIONS
The equipment listed in this document may not be used for the applications listed below:
・
・Automobile, automotive parts
・Aircraft, aeronautic equipment
・Amusement equipment, sport equipment, game machines
・Nuclear equipment
・Machine or devices acting directly on the human body
・Household apparatus
・Instruments or devices to transport or carry people
・Vacuum equipment
・
If the above list includes your intended application, please consult us.
malfunction of the product or negative effects on its performance or function.
Safety measures are essential to prevent accidents resulting
in death, injury or damage of the equipment due to
malfunction or faulty operation.
3
SAFETY GUIDE
CAUTION
WARNING
SAFETY NOTE
ITEMS YOU SHOULD NOTE WHEN USING THE ACTUATOR
• PRECAUTIONS FOR ACTUATORS AT THE APPLICATION DESIGN PHASE
Always use under followings conditions.
The actuator is designed to be used indoors. Observe the following conditions:
・ Ambient temperature: 0℃ to 40℃
・ Ambient humidity: 20% to 80%RH (Non-condensation)
・ Vibration: Max 25 m/s2
・ No contamination by water, oil
・ No corrosive or explosive gas
Follow the exact instructions in the related manuals to install
the actuator in the equipment.
・ Ensure precise alignment of the actuator shaft center and the
corresponding center in the application.
・ Failure to observe this caution ma y lead to vi brati on, r e s ulting in damage of
output elements.
• PRECAUTIONS FOR ACTUATORS IN OPERATION
Comply with the toque limits for the actuator.
・ Be aware, that if by accident, the arm attached to the output elem ent hits a
solid object, the output element may become uncontrollable.
Never connect cables directly to a power supply socket.
・ Each actuator must be operated with a proper driver.
・ Failure to observe this caution may lead to injury, fire or damage of the
actuator.
Do not apply impacts and shocks
・ The actuator directly connects with the encoder so do not use a hammer
during installation.
・ Failure to observe this caution could damage the enc oder and may cause
uncontrollable operation.
Avoid handling of actuators by cables.
・ Failure to observe this caution may damage the wiring, causing
uncontrollable or faulty operation.
4
ITEMS YOU SHOULD NOTE WHEN USING THE DRIVER
CAUTION
WARNING
CAUTIONS RELATED TO THE DESIGN
Always use drivers under followings conditions.
The driver generates heat. Use under the following conditions while paying
careful attention to the heat radiation.
・ Mount in a vertical position keeping sufficient clearance.
・ 0℃ to 50℃, 95%RH or below (No condensation)
・ No vibration or physical shock
・ No dust, dirt, corrosive or inflammable gas
Use sufficient noise suppressing means and safe grounding.
A ny n ois e generated on a signa l wire will cause vibration or im proper motion.
Conform to the following conditions.
・ Keep signal and power leads separated.
・ Keep leads as short as possible.
・ Ground act uator and dri ver at on e sin gle po int, m inimum gr ound resis tance
class: D (less than 100 ohms)
・ Do not use a power line filter in the motor circuit.
Pay attention to negative torque by inverse load.
・ Inverse load may cause damages of drivers.
・ Please cons ult our sales office, if you intent to appl y products for inverse
load.
Use a fast-response type ground-fault detector designed for
PWM inverters.
Do not use a time-delay-type ground-fault detector.
Safety measures are essential to prevent accidents resulting
in death, injury or damage of the equipment due to
malfunction or faulty operation.
SAFETY GUIDE
CAUTIONS FO R USAGE
Never change wiring while power is active.
Make sure of power non-active before servicing the products. Failure to
observe this caution may result in electric shock or personal injury.
Do not touch terminals or inspect products at least 5
minutes after turning OFF power.
・ Otherwise residual electric charges may result in electric shock.
・ Make installation of products not easy to touch their inner electric
components.
5
SAFETY GUIDE
CAUTION
CAUTION
Do not make a voltage resistance test.
・ Failure to observe this caution may result in damage of the control unit.
・ Please consult our sales office, if you intent to use a voltage resistance
Do not operate control units by means of power ON/OFF
・ Start/stop operation should be performed via input signals.
・ Failure to observe this caution may result in deterioration of electronic
DISPOSAL
All products or parts should be disposed of as industrial
Since the case or the box of drivers ha ve a material indication, classif y parts
test.
switching.
parts.
waste.
and dispose them separately.
6
Contents
Introduction ............................................................................................................. 4
SAFETY GUIDE ...................................................................................................... 3
NOTATION ............................................................................................................. 3
LIMIT ATION OF APPLICA TI ONS ........................................................................... 3
SAFETY NOTE ...................................................................................................... 4
Contents .................................................................................................................. 7
Overview 12
1-1 Overview ......................................................................................................... 13
1-2 Model………………………………………………………………………………..14
1-3 Drivers and extension cables ........................................................................ 15
1-4 Specifications ................................................................................................ 16
1-5 Motor shaft brake .......................................................................................... 25
1-6 External dimensions ..................................................................................... 28
1-7 Mechanical accuracy .................................................................................... 40
1-8 One-Way Positi o nal ac c ur acy ....................................................................... 42
Repeatability (CG type) ........................................................................................ 43
Bi-directional repeatability (CG type) .................................................................... 43
1-9
Encoder specifications (Absolute encoder)
.................................................................. 44
1-10 Output Stiffness ....................................................................... 46
Moment stiffness .................................................................................................. 46
Torsional Stiffness ................................................................................................ 47
Torsional Stiffness (Ratio 11: HPF) ....................................................................... 49
1-11 Direction of rotation ................................................................. 50
1-12 Shock resistance ..................................................................... 51
1-13 Vibration resistance ................................................................. 52
1-14 Operable range ........................................................................ 53
1-15 Cable specifications ................................................................. 68
Motor cable specifications .................................................................................... 68
Encoder cable specifications ................................................................................ 69
1
2
3
4
5
6
7
8
9
10
11
付
Outline
Selection guidelines 70
2-1 SHA series selection ....................................................................................... 71
Allowable load moment of inertia .......................................................................... 71
2-2 Change in load moment of inertia ................................................................. 75
2-3
Verifying and examining load weights
Maximum load moment load ................................................................................. 77
Verifying life .......................................................................................................... 77
Verifying static safety coefficients ......................................................................... 79
2-4 Examining operating conditions .................................................................... 80
Calculate the actuator rotation speed ................................................................... 80
Calculating and examining load moment of inertia ................................................ 80
Load torque calculation ........................................................................................ 81
Acceleration and deceleration time ....................................................................... 82
Examining effective torque and average rotation speed ....................................... 83
................................................................. 76
Installing the SHA actuator 85
3-1 Receiving Inspection ....................................................................................... 86
Inspection procedure ............................................................................................ 86
3-2 Notices on handling ........................................................................................ 87
Installation and transmission torque ..................................................................... 87
Precautions on installation .................................................................................... 89
Use of positioning pins ......................................................................................... 90
Surface treatments ............................................................................................... 90
3-3 Location and installation .................................................................................. 91
Operating Environment ......................................................................................... 91
Installation ............................................................................................................ 92
1-1 Overview
Options 93
4-1 Options ............................................................................................................ 94
Origin and end limit sensors (option code: L) ........................................................ 94
Option for side exit cables (option code: Y) .......................................................... 94
Output s haft single rev olution absolute model (option code: S)
Stand (CG type only) ............................................................................................ 94
Extension cables .................................................................................................. 97
...................................... 94
Appendix 100
5-1 Unit conversion ........................................................................................... 101
5-2 Calculating moment of inertia ..................................................................... 103
Formula for moment of inertia and mass ............................................................ 103
Moment of inertia of a cylinder ............................................................................ 105
Index ....................................................................................................................... 0
8
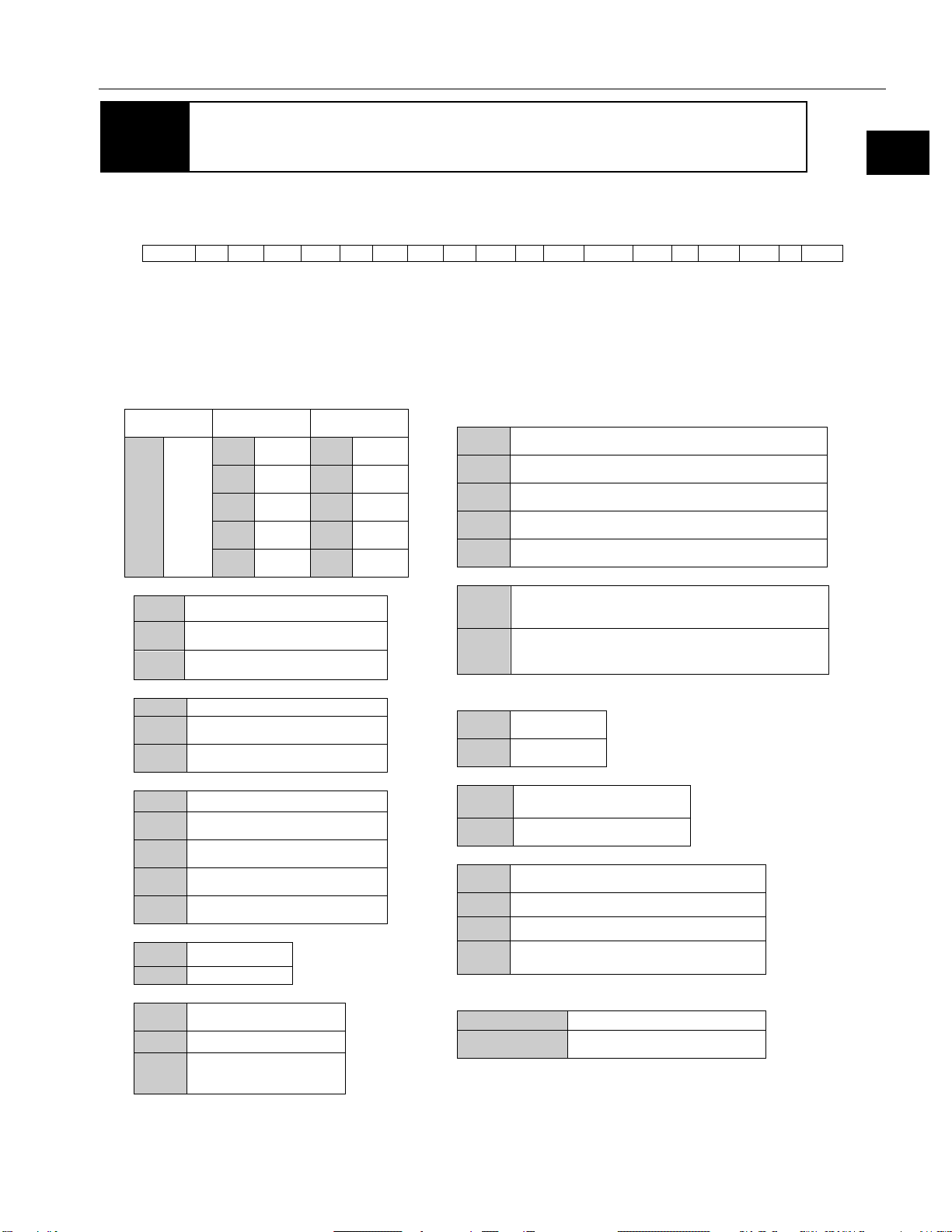
1-1 Overview
Outline
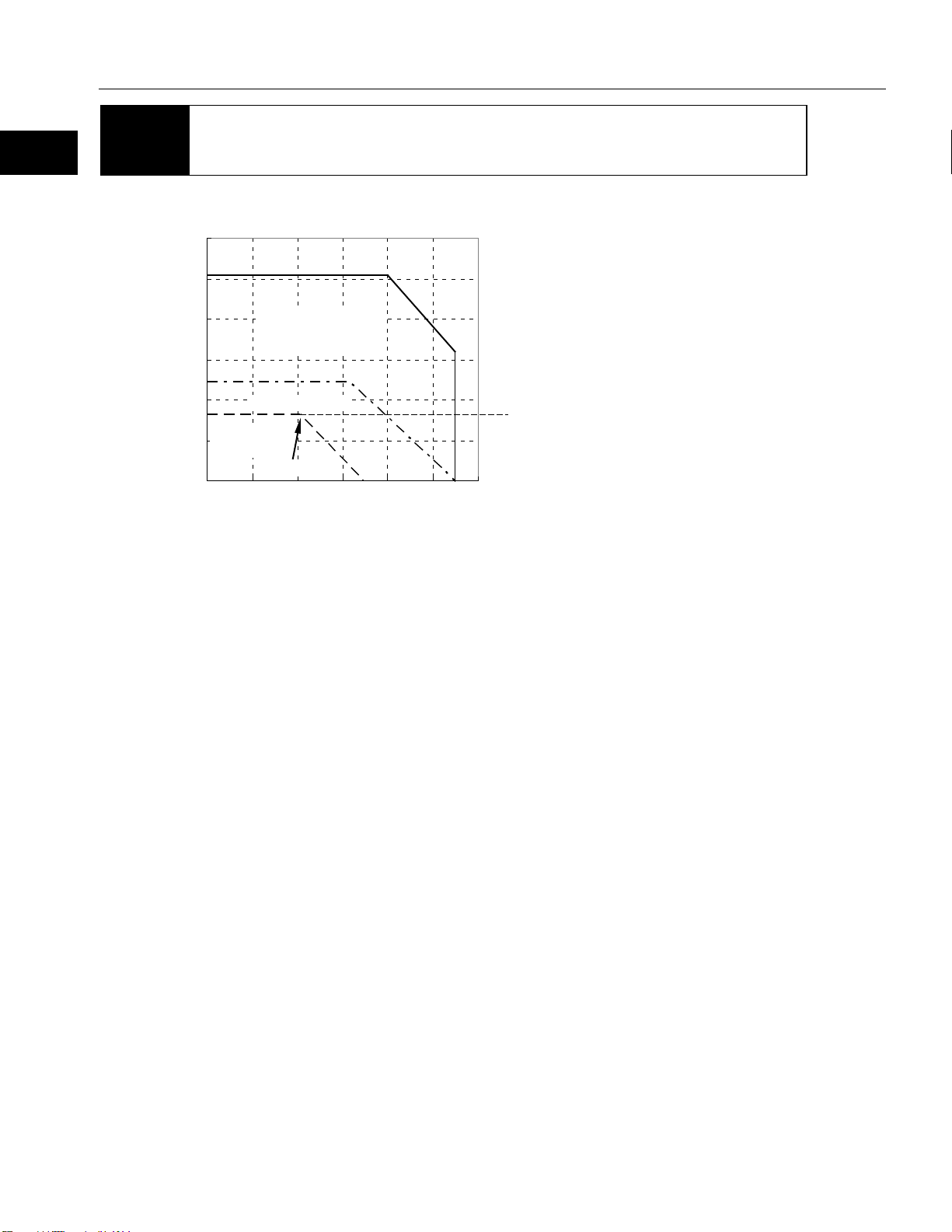
放熱板:350 *350*18
0
25
50
75
100
125
150
0 20 40 60 80 100 120
回転速度 [r/min]
トルク [Nm]
加減速運転領域
連続使用領域
50%デューティ領域
Allowable continuous torque
A
Radiation plate: 350*350*18
Torque [Nm]
Motion range during
accel
deceleration
50% duty range
Continuous
motion range
Rotation speed [rpm]
1 Overview of the SHA series
eration and
9
1
2
3
4
5
6
7
8
9
10
11
付
Outline
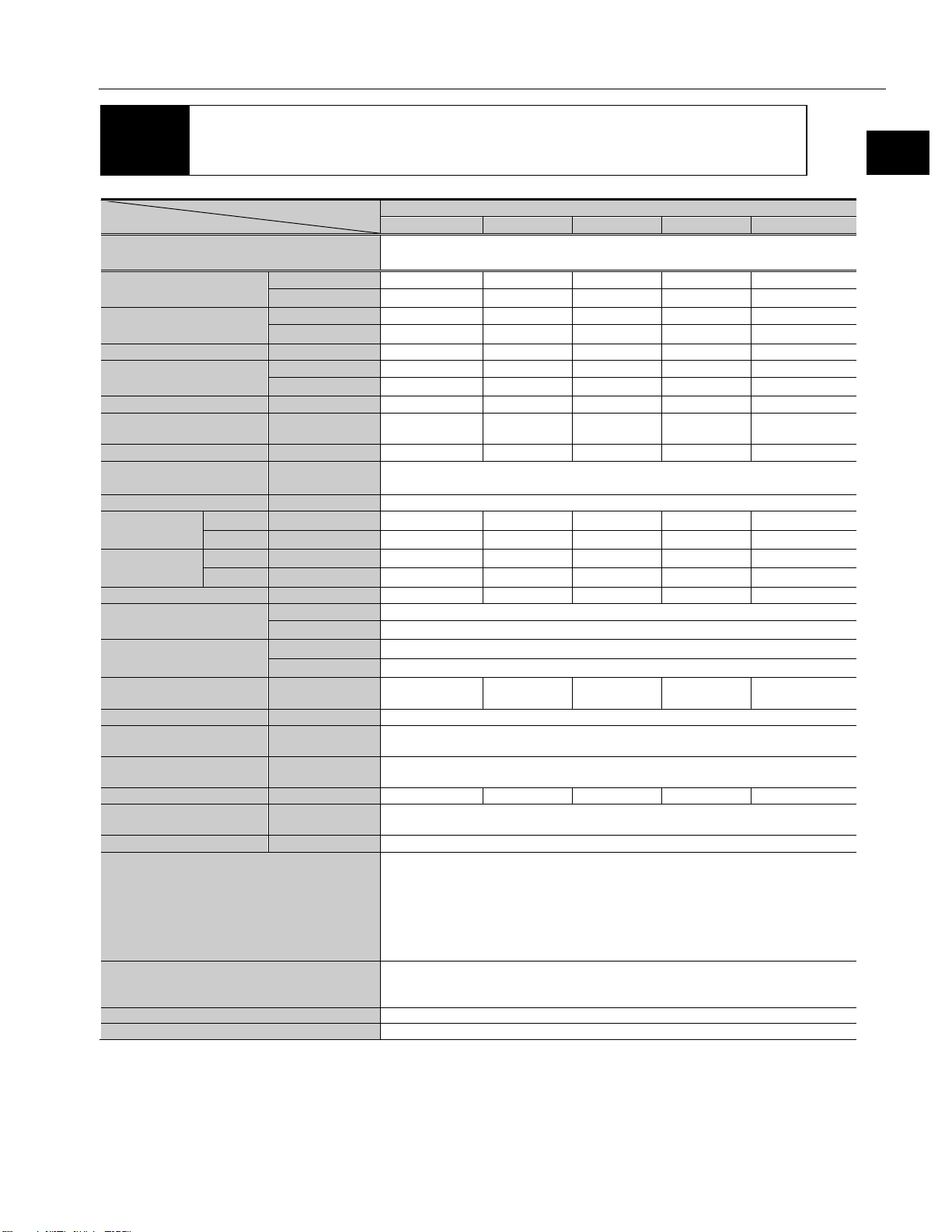
.
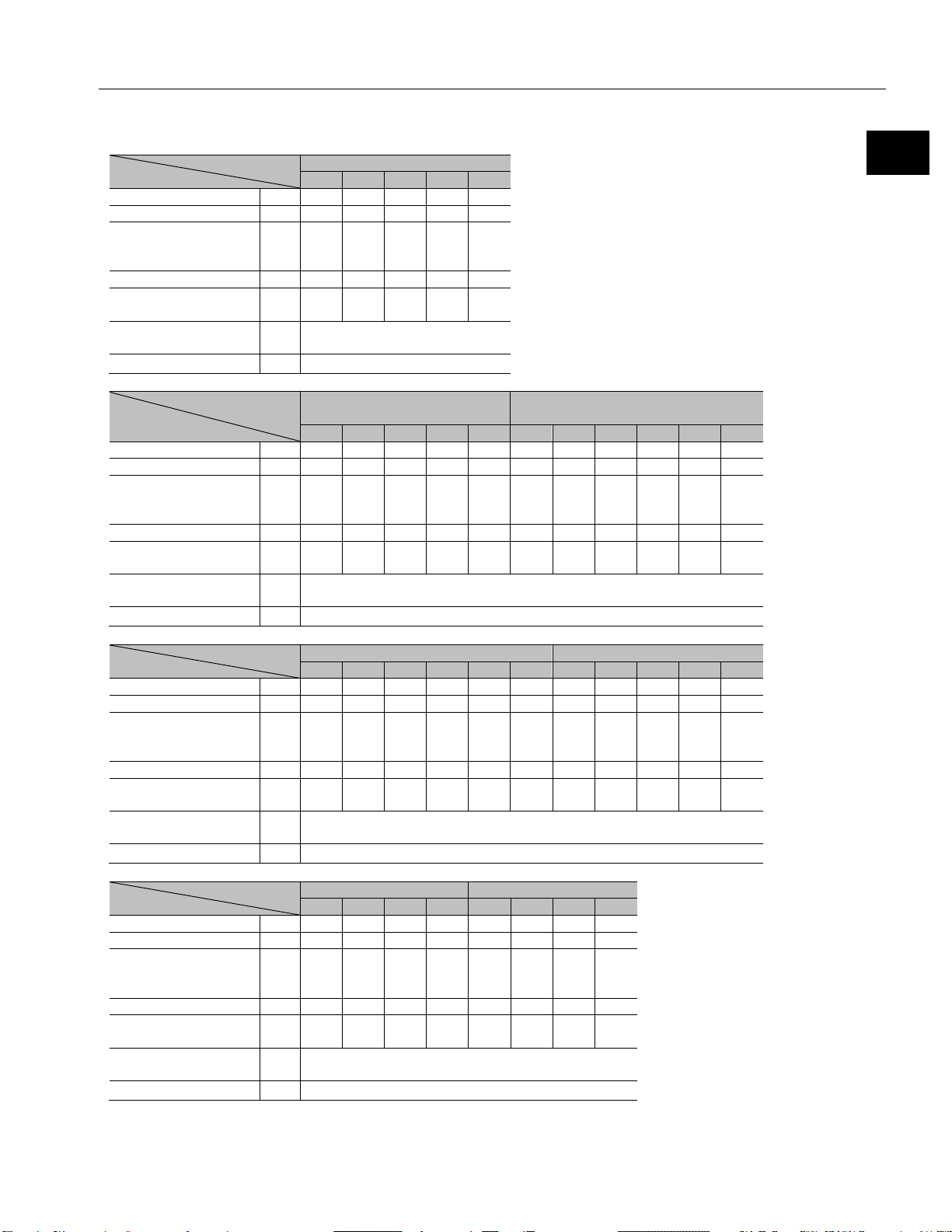
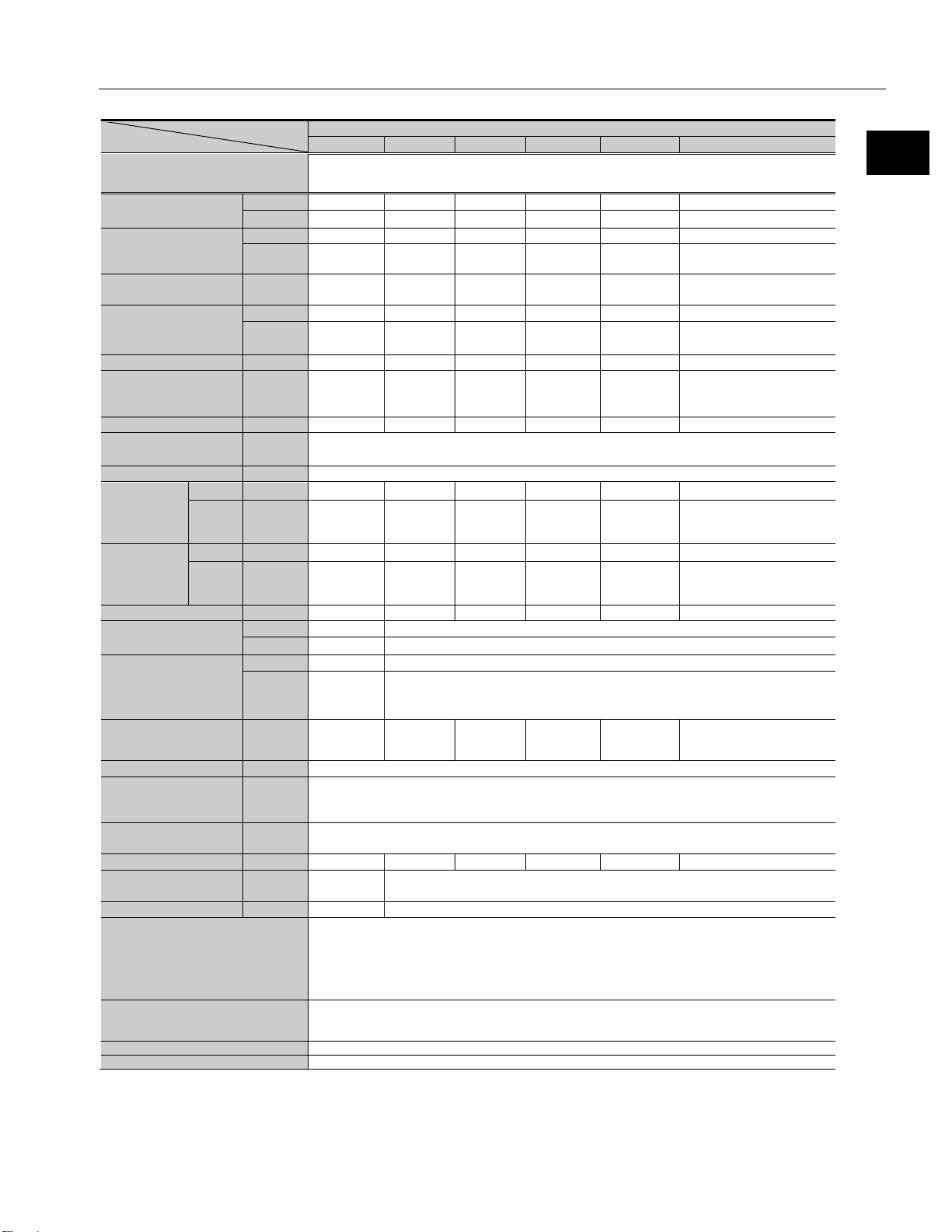
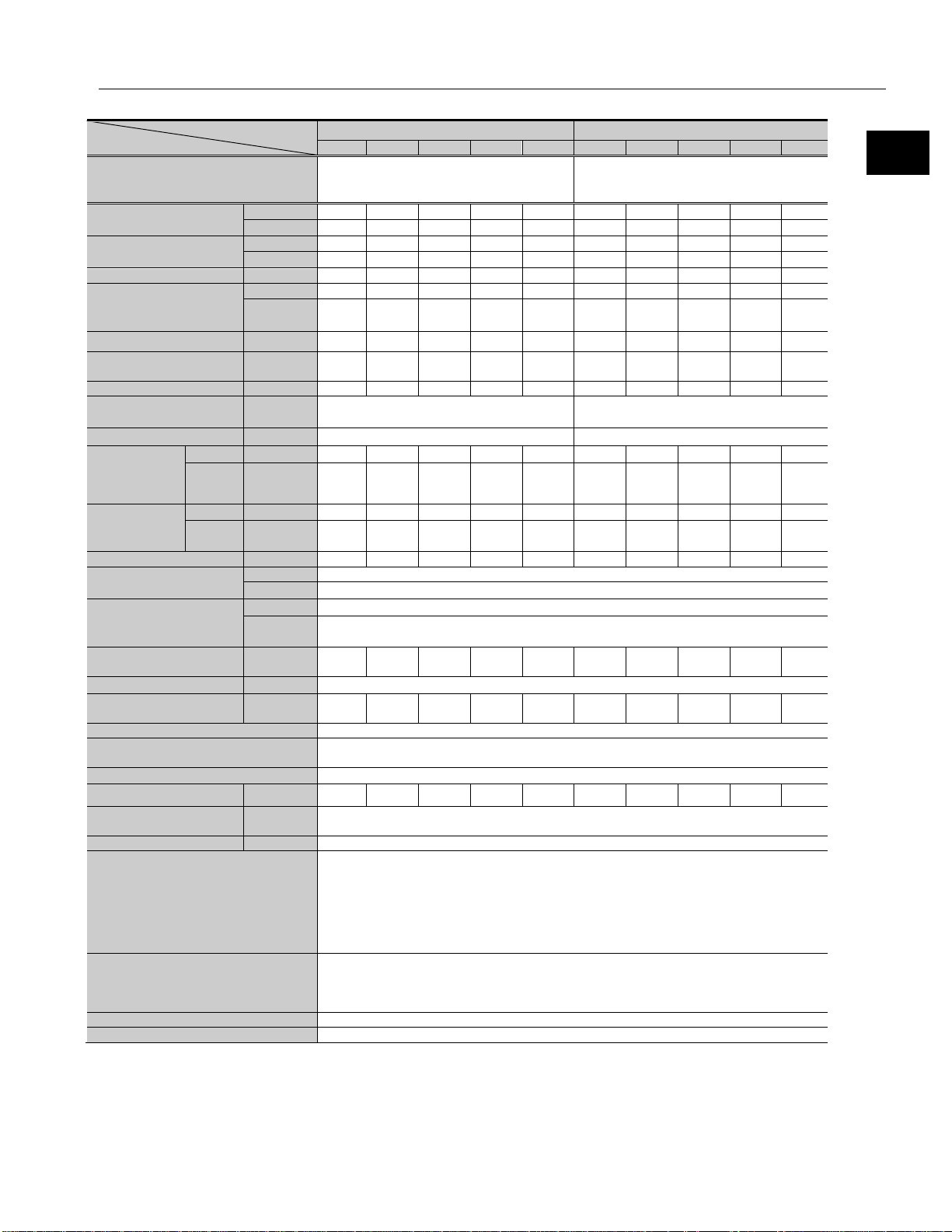
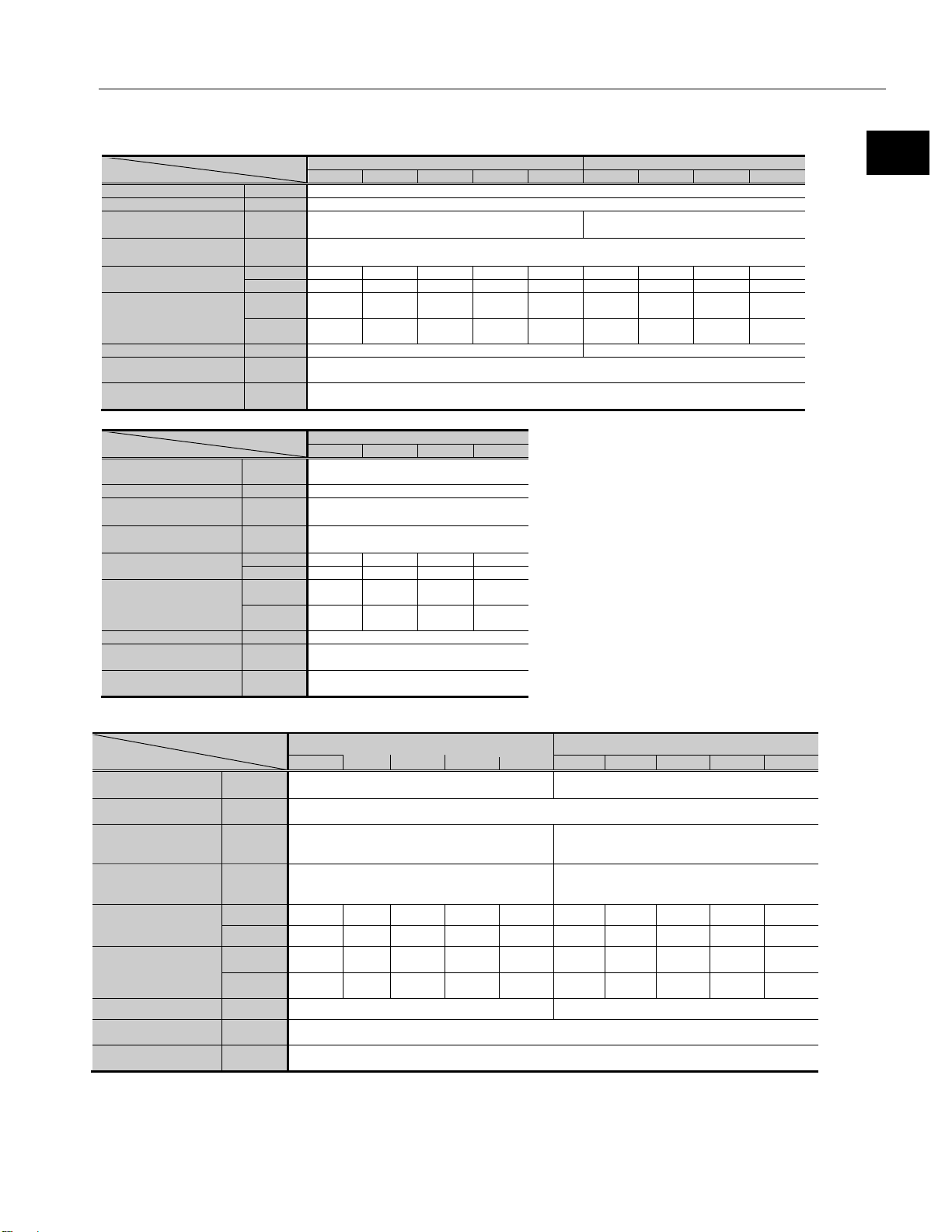
Model
Item
SHA20A
51
81
101
121
161
(1) Output at point A
W
99
109
109
106
86
(2) Voltage at point A
V
113
117
117
119
122
(3) Allowable
current
(4) Speed at point A
rpm
44
30
24
21
17
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
Model
SHA25A
(Motor input voltage 100V)
51
81
101
121
161
11
51
81
101
121
161
(1) Output at point A
W
165
188
190
178
127
133
175
203
207
178
127
(2) Voltage at point A
V
61
64
65
64
62
101
115
122
125
125
120
(3) Allowable
current
(4) Speed at point A
rpm
45
31
25
21
15
141
41
29
24.5
21
15
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
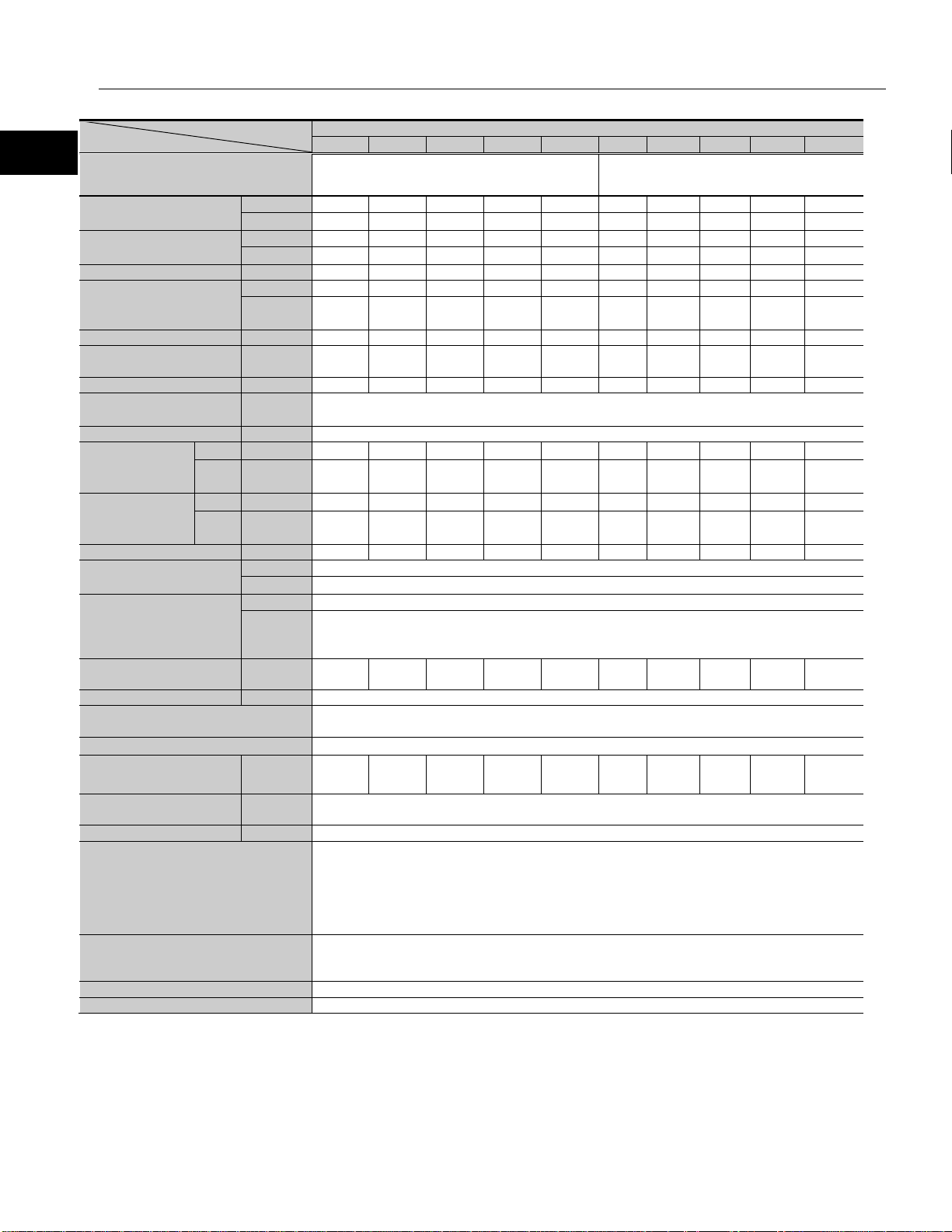
Model
Item
SHA32A
SHA40A
11
51
81
101
121
161
51
81
101
121
161
(1) Output at point A
W
240
328
369
373
308
233
487
564
570
560
480
(2) Voltage at point A
V
97
110
114
118
116
115
109
115
115
116
122
(3) Allowable
current
(4) Speed at point A
rpm
115
34
23
20
16.5
12.5
29
20.5
16.5
14
12
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
Model
Item
SHA58A
SHA65A
81
101
121
161
81
101
121
161
(1) Output at point A
W
897
948
863
731
964
963
958
802
(2) Voltage at point A
V
99
101
101
107
92
92
96
100
(3) Allowable
current
(4) Speed at point A
rpm
12
10
8.5
7.2
10 8 7.4
6.2
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
SG/HP type
1-1 Overview
Item
continuous
continuous
A
2.1 2.0 2.0 1.9 1.6
rms
Hz 187 203 202 212 228
℃ 40
-
SHA25A (Motor input voltage 200V)
A
4.7 4.7 4.7 4.5 3.7 3.0 3.0 3.0 2.9 2.6 2.1
rms
Hz 191 209 210 212 201 129 174 196 206 212 201
℃
-
40
continuous
A
6.0 6.0 6.0 5.7 5.0 4.1 9.0 9.0 9.0 8.8 7.2
rms
Hz 105 145 155 168 166 168 123 138 139 141 161
℃
-
40
continuous
A
17.7 17.8 16.4 13.4 22.0 21.9 20.1 16.3
rms
Hz 130 135 137 155 108 108 119 133
℃
-
40
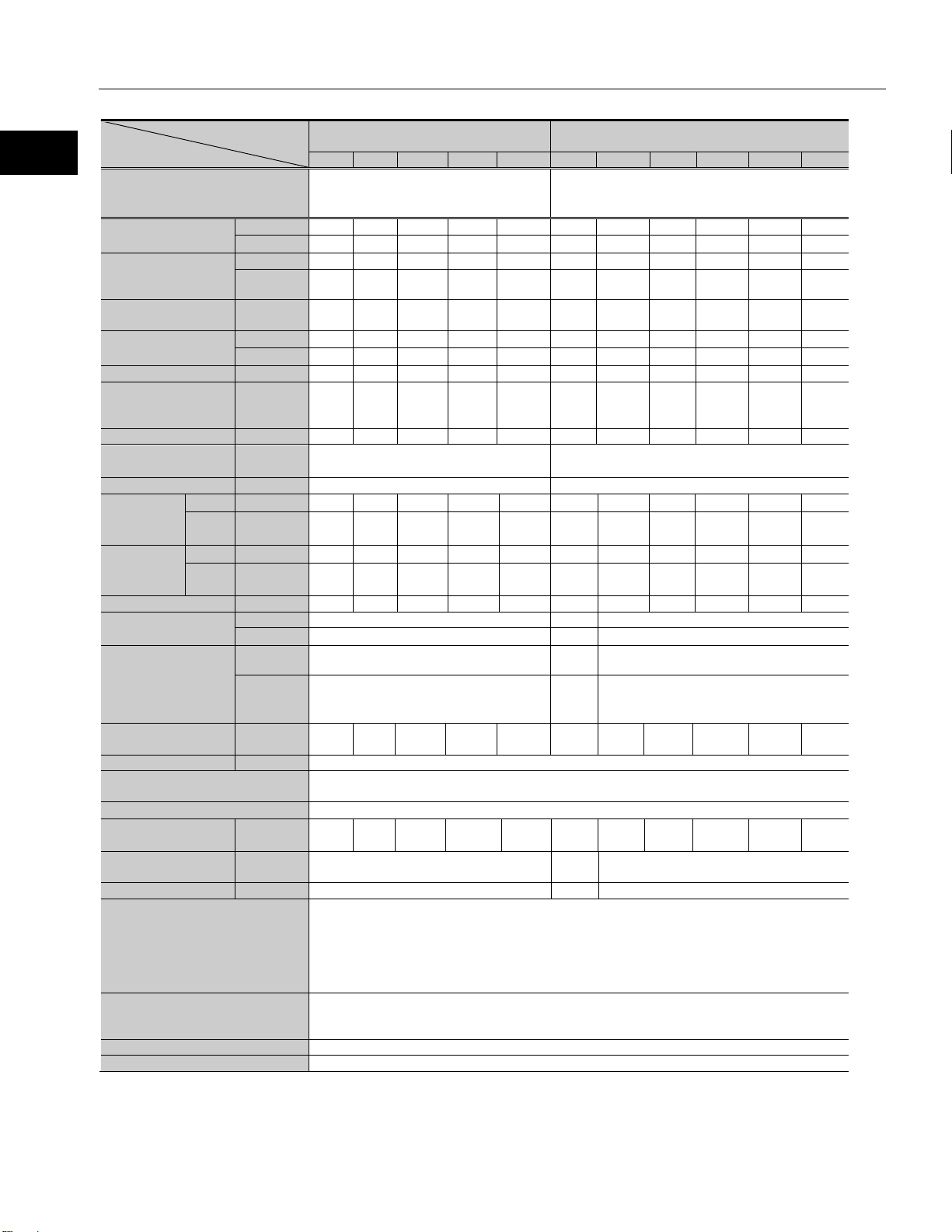
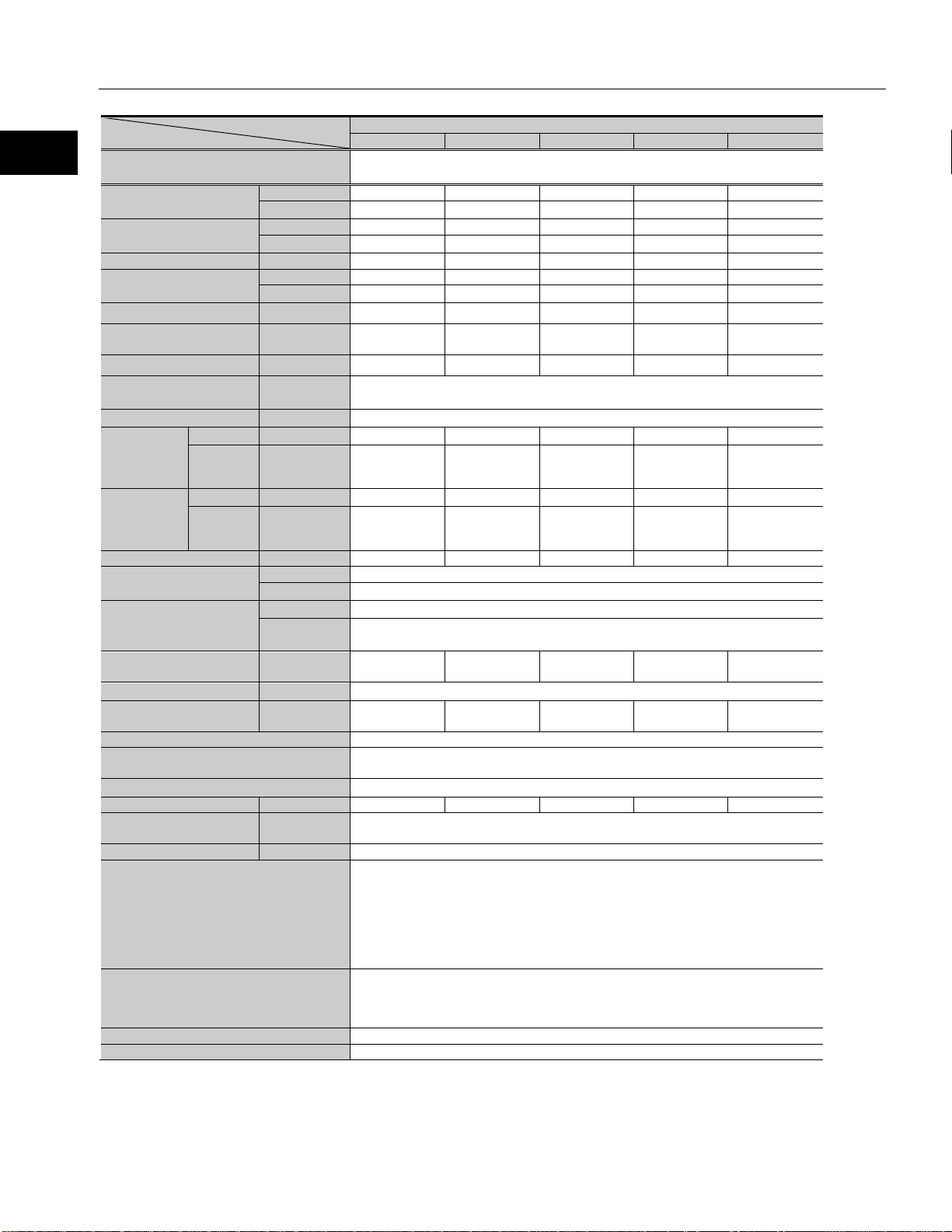
10
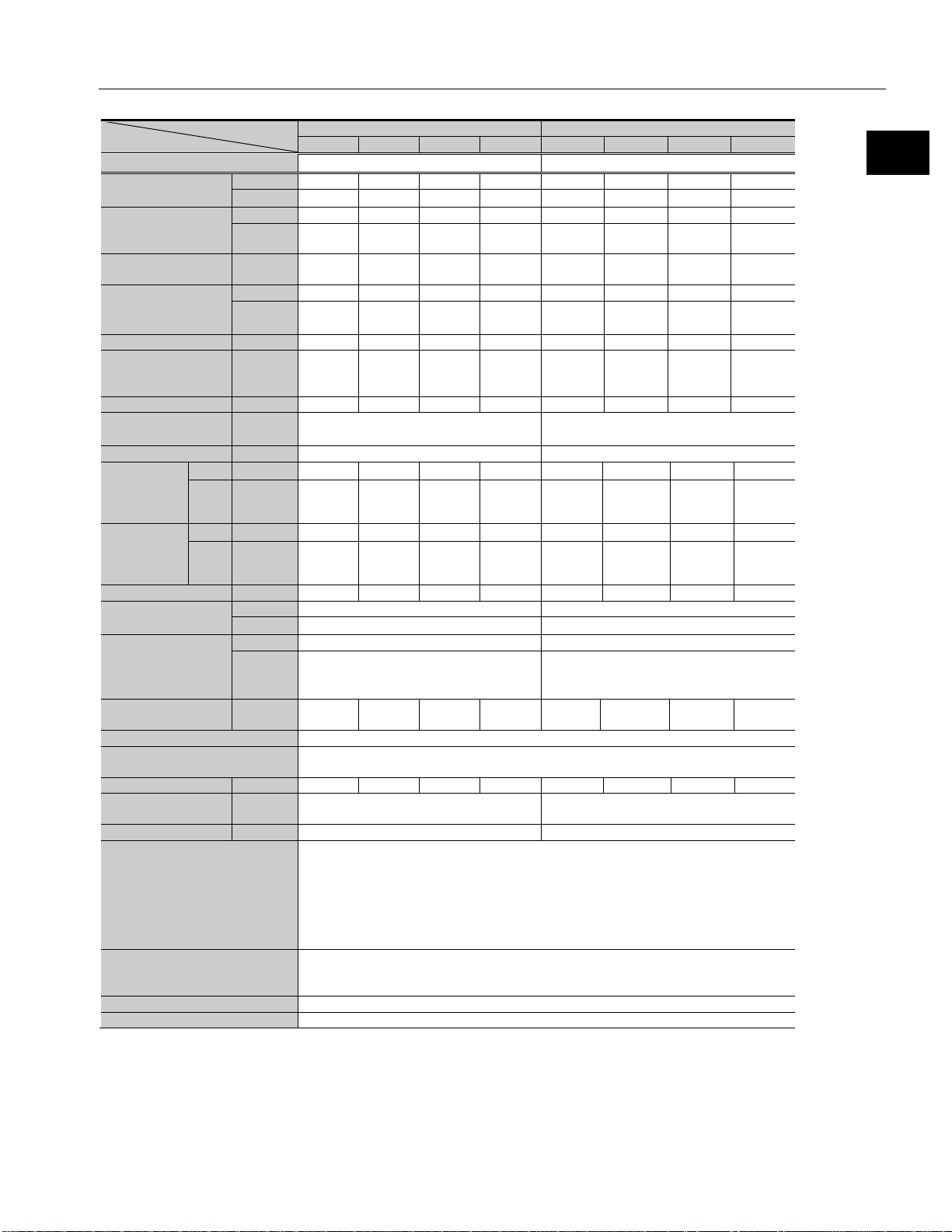
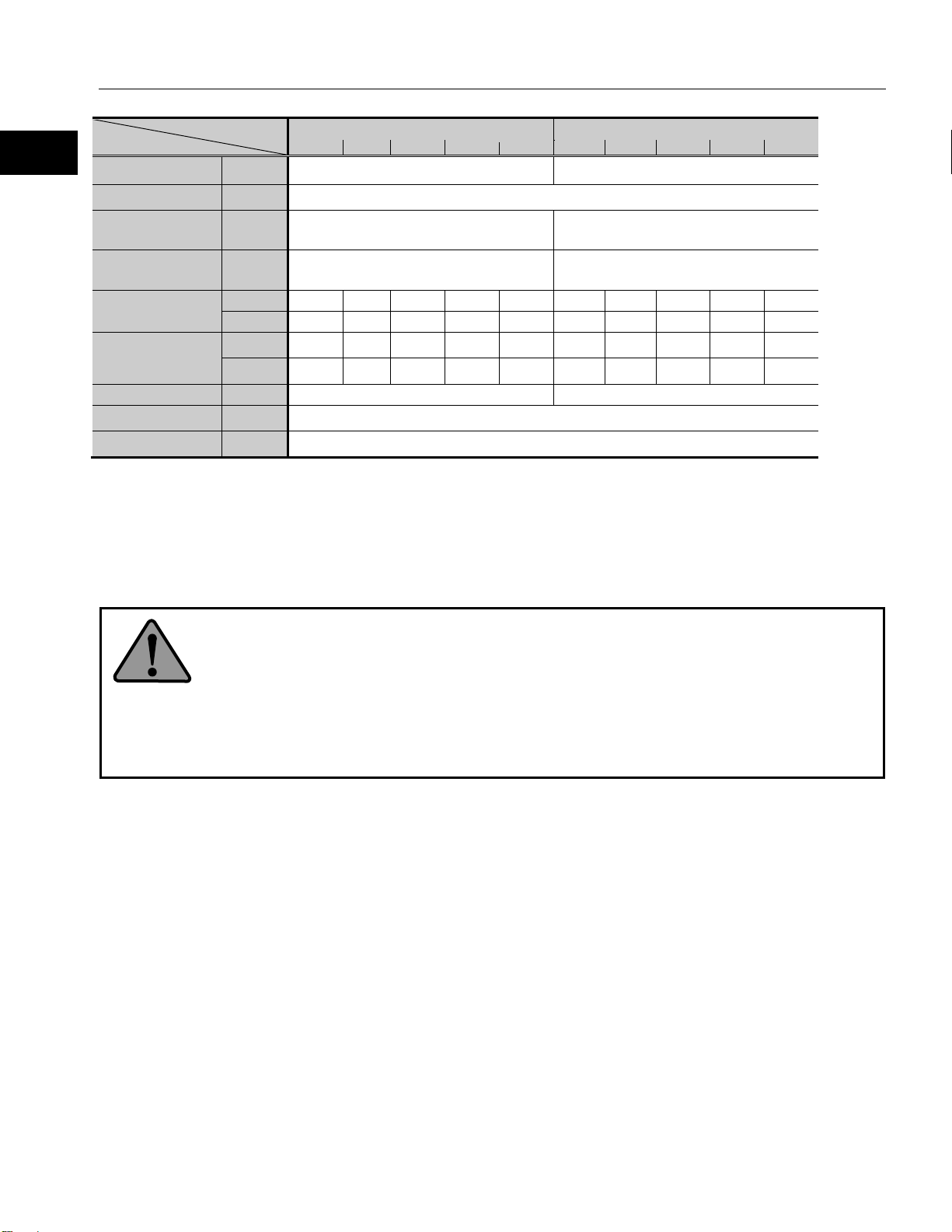
1-1 Overview
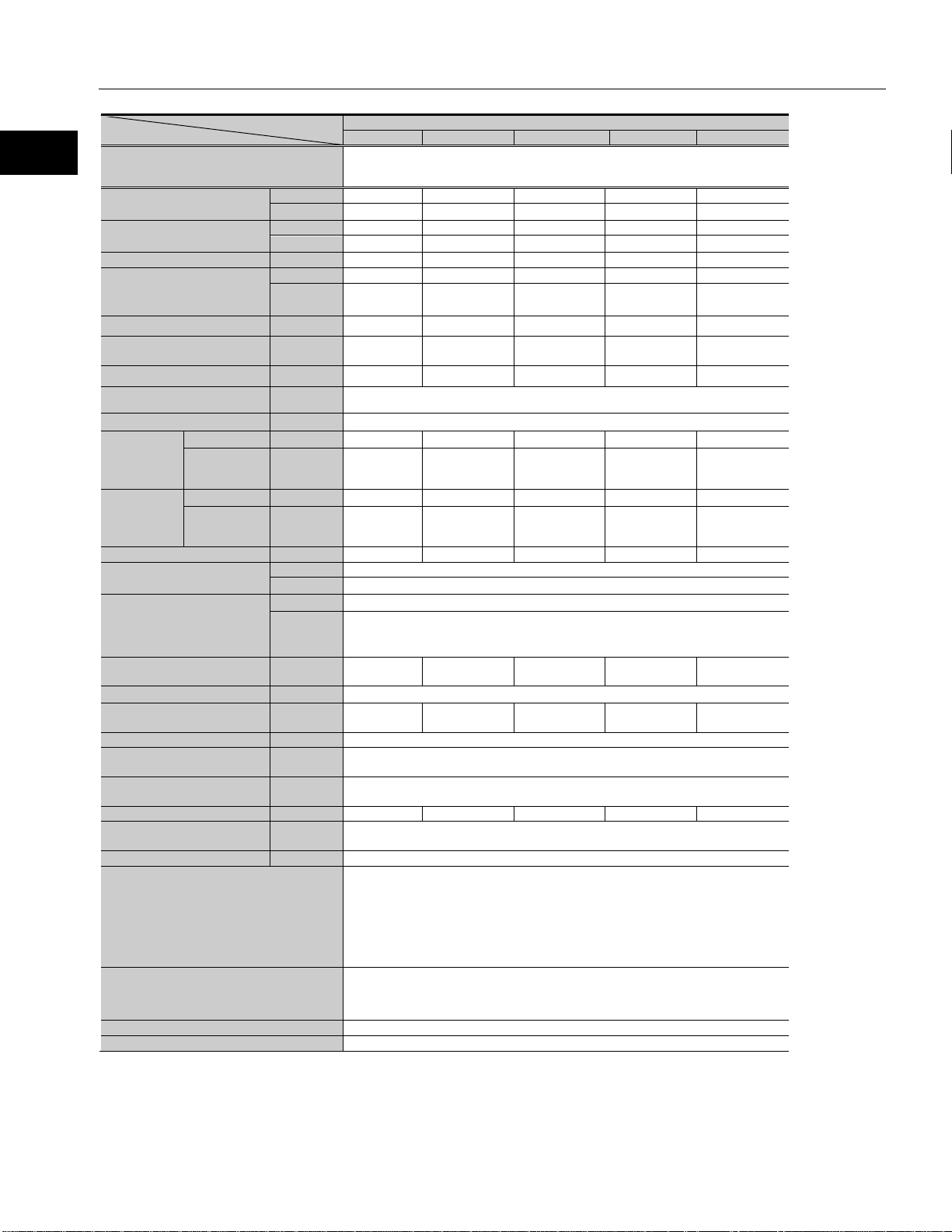
Outline
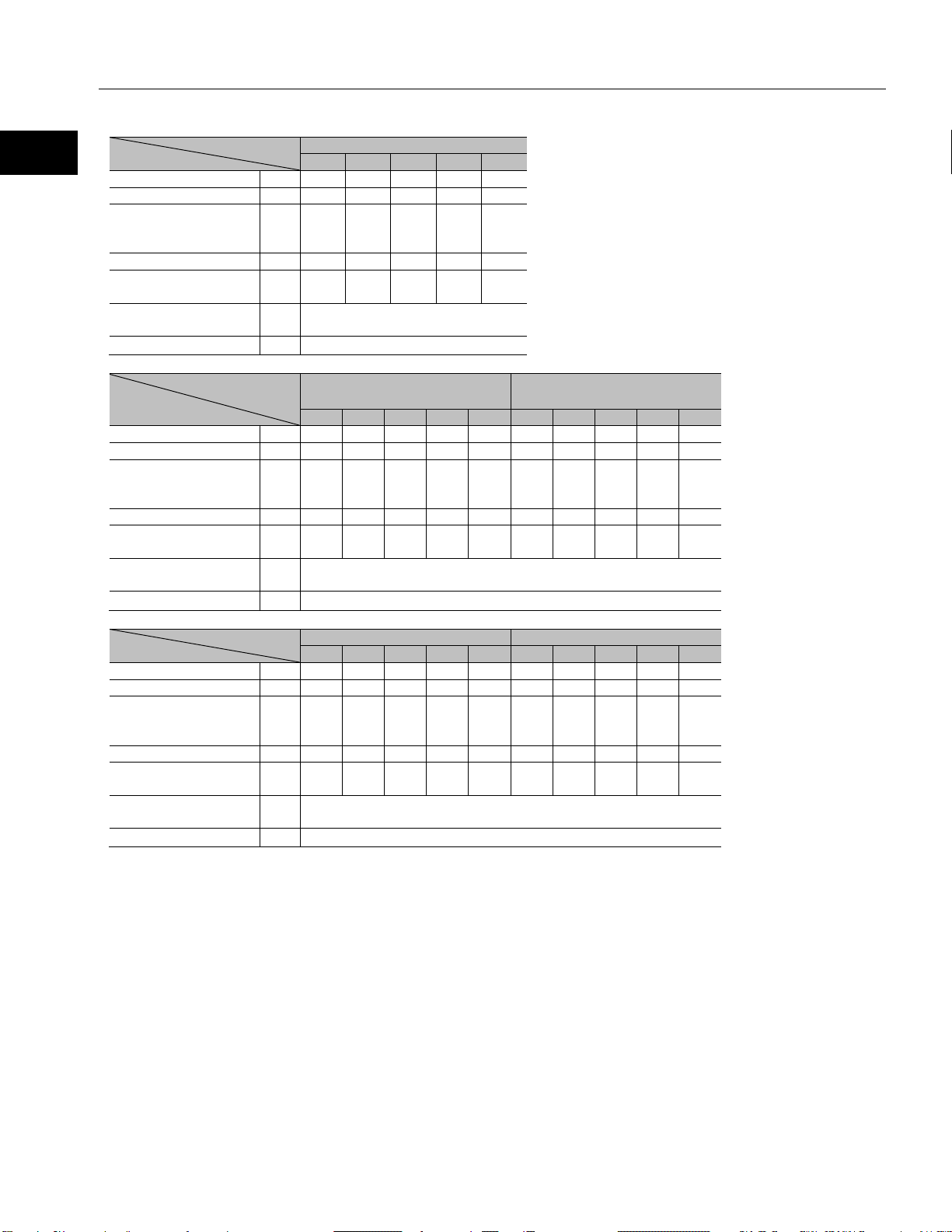
Model
Item
SHA20A
50
80
100
120
160
(1) Output at point A
W
97
108
108
106
85
(2) Voltage at point A
V
112
116
116
119
122
(3) Allowable
current
(4) Speed at point A
rpm
44
29.5
24
21
17
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
Model
SHA25A(Motor input voltage
100V)
SHA25A((Motor input
voltage 200V)
50
80
100
120
160
50
80
100
120
160
(1) Output at point A
W
167
191
192
174
127
177
201
204
174
127
(2) Voltage at point A
V
62
65
65
63
61
115
121
123
123
119
(3) Allowable
current
(4) Speed at point A
rpm
47
32
25.5
20.5
15
42
29
24
20.5
15
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
Model
Item
SHA32A
SHA40A
50
80
100
120
160
50
80
100
120
160
(1) Output at point A
W
321
372
373
308
233
493
558
568
568
488
(2) Voltage at point A
V
109
114
117
116
115
109
114
115
116
123
(3) Allowable
current
(4) Speed at point A
rpm
34
23.5
20
16.5
12.5
30
20.5
16.6
14.2
12.2
(5) Frequency at
point A
(6) Allowable range
temperature
(7) Number of phase
3
CG type
Item
continuous
continuous
A
2.1 2.1 2.1 2.0 1.7
rms
Hz 183 197 200 210 227
℃
-
A
4.7 4.7 4.7 4.5 3.7 3.0 3.0 3.0 2.6 2.1
rms
Hz 196 213 213 205 200 175 193 200 205 200
℃
-
40
40
continuous
A
6.0 6.0 5.7 5.0 4.1 9.0 9.0 9.0 8.8 7.2
rms
Hz 142 157 167 165 167 125 137 138 142 163
℃
-
40
11
1
2
3
4
5
6
7
8
9
10
11
付
Outline
Chapter 1
Overview
This chapter explains the features, functions and specifications of the actuator.
1-1 Overview ············································································· 13
1-2 Model ················································································· 14
1-3 Drivers and extension cables ··················································· 15
1-4 Specifications ······································································· 16
1-5 Motor shaft brake ·································································· 25
1-6 External dimensions ······························································ 28
1-7 Mechanical accuracy ····························································· 40
1-8 Position al ac cur acy ······························································· 42
1-9
Encoder specifications (Absolute encoder)
1-10 Output Stiffness ································································· 46
1-11 Direction of rotation ····························································· 50
1-12 Shock resistance ································································ 51
1-13 Vibration resistance ···························································· 52
1-14 Operable range ·································································· 53
1-15 Cable specifications ···························································· 68
············································· 44
1-1 Overview
12
1-1 Overview
Outline
1-1 Overview
The SHA series of AC Servo Actuators provide high torque and high accuracy rotary motion. These AC Servo Actuators are
each composed of a Harmonic Drive® speed reducer for precise control and a flat, high performance AC servo motor with an
integral absolute multi-turn encoder. The SHA series AC Servo Actuators all feature a large hollow shaft through the axis of
rotation.
There are 3 types of speed reducers: SG with SHG series incorporated, HP with HPF series incorporated, and CG with the
CSG series incorporated. They are an advanced version of current FHA series AC Servo Actuators having a flat, hollow
structure.
One key feature of the SHA actuators is their compact size. The outside diameter has been minimized, providing a maximum
torque/volume ratio which is approximately double that of conventional FHA actuators. A through hole is provided in the
center of the actuator, through which wiring, air lines, laser beams or concentric shafts may be passed.
The HA-800 series driver is a dedicated family of servo drive units for position/speed control, developed exclusively for driving
SHA series actuators. The small, multi-functional drivers control the SHA series actuators' operations with great accuracy and
precision. Additionally, the REL driver series may be used, which provides interface to many network field buses.
◆ Improved Torque Density
High-torque SHG or CSG series Harmonic Drive® speed reducers are incorporated into the actuator for precise control and
the outer diameter of the actuator has been reduced by 20% compared to our conventional products. As a result, the maximum
torque/volume ratio has approximately doubled compared to our previous actuator designs. Based on maximum torque, you
can select a model which is one size smaller. Also, the output torque is much higher than direct drive motors of similar
volume/weight. This is another reason why the SHA series has an outstanding performance advantage.
◆ Expanded product lineup
6 models are available for SG, accommodating high torque up to 3,400 Nm. The SHA line als o inc lud es m ode ls with reduction
ratios of 51 to 161. CG series has 4 fra me sizes available with 5 reduction ratios of 50:1 to 160:1.
◆ Modular design
The components of the SHA series, such as speed reducers, output shaft bearing, motor, brake and encoder, are arranged
based on a modular design. We can also custom-design a model to meet your specific requirements. Please contact your
HDLLC sales representative for details.
◆ Standar d 17-bit mag netic absolute encoder
The newly developed AC servo motors are equipped with our original, highly reliable 17-bit magnetic* absolute encoder with
safety functions. The serial communication reduces wiring and provides not only a multi-turn encoder, which is a must-have
feature on actuators with speed reducers, but it also has an internal backup to retain absolute positions even when the
encoder cable is disconnected for short periods of time.
The encoder circuitry also constantly compares two separate sets of encoder signals. If any abnormality is detected, the
encoder's built-in failsafe function outputs an alarm signal to the host system.
*SHA 20 comes with an optical encoder.
◆ Support for network control s
By using a dedicated HA-800 series driver, you can control your actuator on a MECHATROLINK-II or CC-Link network. The
REL series drivers support EtherCat, CANOpen, and Dev ice N et.
◆ For high speeds
Also supports high speeds in combination with the HPF hollow shaft planetary speed reducer.
13
1
2
3
4
5
6
7
8
9
10
11
付
Outline
SHA
32 A 101
SG - B 12 A 200 -
10
S17b
A - C L -
SP
(1)
(2)
(3)
(4)
(5) -
(6)
(7)
(8)
(9) -
(10)
(11)
(12) -
(13)
(14) -
(15)
A
Size: 58, 65 (SG only)
08
Size: 20
B
With brake
(10) Encoder format
With standard connector
(for extension cables)
Output shaft single revolution absolute
model (CG only)
Blank
Standard product
1-2 Model
Model numbers for the SHA series actuators and how to interpret them are explained below.
Examples of standard models
(1) Model: SHA series actuator
(2) Size: SG: 20, 25, 32, 40, 58, 65
(3) Version: A: Standard, Y: Yaskawa compatible, M: Mitsubishi compatible, P: Panasonic compatible
(4) Reduction ratio (R:1)
Reduction ratio 11 is for the HPF hollow shaft planetary (Size 25, 32)
Reduction ratios 50 and higher are for the HarmonicDrive
(5) Gearhead
(6) Motor version symbol
(7) Motor size
(8) Brake
(9) Motor input voltage
:
CG: 20, 25, 32, 40
HP: 25, 32
HPF SHG CSG
51 51:1 50 50:1
81 81:1 80 80:1
11 11:1
HP HPF hollow shaft planetary
SG HarmonicDrive® SHG series
CG HarmonicDrive® CSG series
B Size: 25, 32, 40
C Size: 20
09 Size: 25
12 Size: 32
15 Size: 40
21 Size: 58, 65 (SG only)
A Without brake
100 100V (Size 25 only)
200 200V
LV
101 101:1 100 100:1
121 121:1 120 120:1
161 161:1 160 160:1
48V DC to 90V DC
(Size 20, 25,32)
®
gears
10 A-Format (2.5Mbps, 1 to 1 connection)
00 Incremental Encoder
14 Panasonic Format
16 Mitsubishi Format (not available in size 20)
17 Yaskawa Format (not available in size 20)
(11) Encoder type, resolution
S17b
D250 D250: Incremental encoder (size 25, 32, and 40)
(12) Encoder phase angle: Phase difference between
induced voltage in motor phase U and absolute origin
A 0 degree
B 30 Dgree
(13) Connector specification
C
N With Pigtails
(14) Option symbol
L With near origin and end limit sensors
Y Side exiting cable
V With mounting stand (CG only)
S
(Please contact us for option-compatible models.)
(15) Special specification
SP____ Special specification code
17-bit absolute encoder, 131,072
pulses/revolution (Nikon-A format)
1-2 Model
14

1-3 Drivers and extension cables
Outline
HA-800A-6 D/E -
200
HA-800B-6D/E -
200
HA-800C-6D/E -
200
HA-800□-6D/E:
TMC
Encoder
cable
1-3 Drivers and ext ension cables
The proper combination of SHA actuators, drivers, and extension cables are as follows:
SHA20A SHA25A SHA32A SHA40A SHA58A SHA65A
REL Servo Drive
HA-800 Standard
I/O command type
REL-230-18 REL-230-18
HA-800A-
HA-800A-
3D/E -200
3D/E-200
(HA-800A-
6D/E -100)
REL230-36
REL 230-40
HA-800A6D/E -200
200
or
HA-800A-24D/E -
HA-800A-
24D/E -200
HA-800A-
24D/E -
200
HA-800
MECHATROLINK
HA-800 CC-Link
Extension
cables
(option)
Motor
cable
HA-800B-
3D/E -200
HA-800C3D/E -200
HA-800B3D/E -200
(HA-800B-
6D/E -100)
HA-800C3D/E -200
(HA-800C-
6D/E -100)
EWD-MB**-A06-TN3
(Driver side connector
supplied separately)
EWD-S**-A08-3M14 EWD-S**-D10-3M14
HA-800B6D/E -200
HA-800C6D/E -200
200
or
HA-800B-24D/E -
200
or
HA-800C-24D/E -
EWD-MB**-A06-
TN3
HA-800□-24D/E:
EWD-MB**-A06-
HA-800B-
24D/E -200
HA-800C-
24D/E -200
EWD-MB**-D09-TMC
** in the extension cable model indicates the cable length: 03 = 3m, 05 = 5m, 10 = 10m
The models shown in parenthesis are those with 100V motor input voltage combinations.
HA-800B-
24D/E -
200
HA-800C-
24D/E -
200
15
1
2
3
4
5
6
7
8
9
10
11
付
Outline
Model
Item
SHA20A
51
81
101
121
161
REL-230-18
HA-800□-3D/E-200
Nm
73
96
107
113
120
kgf・m
7.4
9.8
10.9
11.5
12.2
Allowable continuous
torque
Nm
21
35
43
48
48
kgf・m
2.1
3.6
4.4
4.9
4.9
Max. rotational speed*1
rpm
117.6
74.1
59.4
49.6
37.3
Nm/A
16.5
27
33
40
53
kgf・m/A
1.7
2.7
3.4
4.1
5.4
Max. current*1
A
rms
6.0
4.9
4.5
4.0
3.4
Allowable continuous
current
EMF constant*3
V/(rpm)
1.9
3.0
3.7
4.5
5.9
Phase resistance
(20℃)
Ω
Phase inductance
mH
2.5
(without brake)
GD2/4
kg・m2
0.23
0.58
0.91
1.3
2.3
J
kgf・cm・s2
2.4
6.0
9.3
13
24
GD2/4
kg・m2
0.26
0.65
1.0
1.4
2.6
J
kgf・cm・s2
2.6
6.6
10
15
26
Reduction ratio
51:1
81:1
101:1
121:1
161:1
moment load
Nm
187
kgf・m
19.1
Nm/rad
25.2×104
kgf・m/arc min
7.5
One-way positional
accuracy
Encoder type
Absolute encoder
Single motor revolution
Encoder resolution
Motor multi revolution
counter
Output resolution
Pulse/rev
6,684,672
10,616,832
13,238,272
15,859,712
21,102,592
Mass
(without brake)
Mass (with brake)
kg
2.1
Environmental conditions
Operating temper ature: 0 to 40℃/Storage temperature: -20 to 60℃
Altitude: les s than 1,000 m above sea level
Motor insulation
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Insulation cl ass: A
Mounting direction
Can be installed in any di rection.
Protection structure
Totally enclosed self-cooled type (IP54)
1-4 Specifications
SG type
Servo Drive
Max. torque*1
*1*2
Torque constant*1
A
2.1 2.0 2.0 1.9 1.6
*1*2
rms
1-4 Specifications
Inertia moment
Inertia moment
(with brake)
Moment stiffness
Permissible
arc-sec
kg 2.0
60 50 50 50 50
Operating humidity/storage humidity: 20 to 80%RH (no condensation)
Resistance to vibr ation: 25 m/s
300 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas , no oil mist
To be used indoors, no direct sunlight
2 *4
1.4
217(131,072)
216(65,536)
2
(frequenc y: 10 to 400Hz)/Shock resistance:
Dielectric strength: AC1,500V/1 min
The table shows typical output values of actuators.
*1: Typical characteristics when combined (driven by ideal sine wave) with our drivers.
*2: Value after temperature rise and saturation when the 320 x 320 x 16 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditions, refer to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P52).
16
1-4 Specifications
Outline
SHA25A
(Motor input voltage 100V)
51
81
101
121
161
11
51
81
101
121
161
REL-230-18
HA-800□-3D/E-200
Nm
127
178
204
217
229
26
127
178
204
217
229
kgf・m
13
18.2
20.8
22.1
23.4
2.7
13
18.2
20.8
22.1
23.4
Allowable
torque
Nm
35
58
73
81
81
9.0
41
67
81
81
81
Max. rotational
speed*1
Nm/A
rms
11.1
17.9
22
27
36
4.2
19
31
39
46
62
kgf・m/A
1.1
1.8
2.3
2.7
3.6
0.43
2.0
3.2
4.0
4.7
6.3
Max. current*1
A
rms
14.9
13.0
12.1
10.9
9.0
8.9
8.6
7.5
7.0
6.3
5.2
Allowable
current
EMF constant*3
V/(rpm)
1.3
2.0
2.5
3.0
4.0
0.47
2.2
3.5
4.3
5.2
6.9
Phase resistance
(20℃)
Phase inductance
mH
1.0
3
GD2/4
kg・m2
0.56
1.4
2.2
3.2
5.6
0.029
0.56
1.4
2.2
3.2
5.6
kgf・cm・
s2
GD2/4
kg・m2
0.66
1.7
2.6
3.7
6.6
0.034
0.66
1.7
2.6
3.7
6.6
kgf・cm・
s2
Reduction ratio
1:51
1:81
1:101
1:121
1:161
1:11
1:51
1:81
1:101
1:121
1:161
Permissible
moment load
Nm
258
410
258
kgf・m
26.3
41.8
26.3
37.9
x 104
kgf・
min
One-way positional
accuracy
Encoder type
Magnetic absol ute encoder
Single motor revolution
Encoder resolution
Motor multi revolution counter
2
16
65,536)
10,61
832
Mass
(without brake)
Mass (with brake)
kg
3.1
5.1
3.1
Environmental conditions
Operating temper ature: 0 to 40℃/Storage temperature: -20 to 60℃
Altitude: les s than 1,000 m above sea level
Motor insulation
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Insulation cl ass: A
Mounting direction
Can be installed in any direction.
Protection structure
Totally enclosed self-cooled type (IP54)
SG/HP type
Item
Model
SHA25A (Motor input voltage 200V)
Servo Drive
Max. torque*1
continuous
*1*2
Torque constant*1
continuous
*1*2
Inertia moment
(without brake)
Inertia moment
(with brake)
REL-230-18
HA-800□-6D/E-100
kgf・m
rpm
A
rms
Ω
J
J
3.6 5.9 7.4 8.2 8.2 0.92 4.2 6.8 8.2 8.2 8.2
94.1 59.3 47.5 39.7 29.8 509.1 109.8 69.1 55.4 46.3 34.8
4.7 4.7 4.7 4.5 3.7 3.0 3.0 3.0 2.9 2.6 2.1
0.4 1.2
5.7 14 22 32 57 0.30 5.7 14 22 32 57
6.7 17 26 38 67 0.35 6.7 17 26 38 67
REL-230-36
Nm/rad
Moment stiffness
m/arc
50 40 40 40 40 120 50 40 40 40 40
6,684,
672
6,
Output resolution
arc-sec
Pulse/rev
kg
Operating humidity/storage humidity: 20 to 80%RH (no condensation)
Resistance to vibration: 25 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas , no oil mist
To be used indoors, no direct sunlight
Dielectric strength: AC1,500V/1 min
The table shows typical output values of actuators.
*1: When combined with a HA-800 driver.
*2: Value after temperature rise and saturation when the 350 x 350 x 18 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditio ns, ref er to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P52).
17
39.2 x 104
11.6 11.3 11.6
217(131,072)
(
13,238,
272
15,859,
712
21,102,
592
1,441,
792
6,684,
672
10,616,
832
2.95 5.0 2.95
2
(
frequency: 10 to 400Hz
)/Shock r esistance: 300 m/s
39.2 x 104
13,238,
272
15,859,
712
2 *4
21,102,
592
1
2
3
4
5
6
7
8
9
10
11
付
Outline
SG/HP type
Model
Item
SHA32A
11
51
81
101
121
161
Nm
62
281
395
433
459
484
kgf・m
6.3
28.7
40.3
44.2
46.8
49.4
Allowable
torque
Nm
20
92
153
178
178
178
Max. rotational
speed*1
Nm/A
rms
4.5
21
33
42
50
66
kgf
・
m/A
rms
Max. current*1
A
rms
19
17.3
15.2
13.5
12.2
9.9
Allowable
current
EMF constant*3
V/(rpm)
0.51
2.3
3.7
4.7
5.6
7.4
Phase resistance
(20℃)
Phase inductance
mH
1.4
Inertia
brake)
GD2/4
kg・m2
0.091
2.0
5.1
8.0
11
20
・
Inertia
brake)
GD2/4
kg・m2
0.11
2.3
5.9
9.2
13
23
・
Reduction ratio
1:11
1:51
1:81
1:101
1:121
1:161
Permissible
moment load
Nm
932
580
kgf・m
95
59.1
Nm/rad
86.1 x 104
100 x 104
kgf・
min
Encoder type
Magnetic absol ute encoder
Single motor
Encoder resolution
Motor multi
revolution counter
Output resolution
Pulse/rev
1,441,792
6,684,672
10,616,832
13,238,272
15,859,712
21,102,592
Mass
(without brake)
Mass (with brake)
kg
9.7
6.2
Environmental conditions
Operating temperature: 0 to 40℃/Storage temperature: -20 to 60℃
Altitude: less than 1,000 m above sea level
Motor insulation
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Insulation class: A
Mounting direction
Can be installed in any direction.
Protection structure
Totally enclosed self-cooled type (IP54)
1-4 Specifications
Servo Drive
Max. torque*1
continuous
Torque constant*1
continuous
moment
(without
moment
(with
*1*2
*1*2
J
J
REL-230-18, REL-230-36
HA-800□-6D/E-200
kgf・m
rpm 436.4 94.1 59.3 47.5 39.7 29.8
A
6.0 6.0 6.0 5.7 5.0 4.1
rms
Ω 0.33
kgf
cm・s2
kgf
cm・s2
2.1 9.4 15.6 18.2 18.2 18.2
0.46 2.1 3.4 4.2 5.1 6.8
0.93 21 52 81 117 207
1.1 24 60 94 135 238
Moment stiffness
One-way positional
accuracy
revolution
m/arc
arc-sec 120 50 40 40 40 40
217(131,072)
216(65,536)
kg 9.4 5.9
25.7 29.6
Operating humidity/storage humidity: 20 to 80%RH (no cond en sation)
Resistance to vibration: 25 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas, no oil mist
To be used indoors, no direct sunlight
Dielectric strength: AC1,500V/1 min
The table shows typical output values of actuators.
*1: When combined with a HA-800 driver.
*2: Value after temperature rise and saturation when the 400 x 400 x 20 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditio ns, ref er to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P 52).
2
(frequency: 10 to 400Hz)/Shock resistanc e: 300 m/s
2 *4
18
1-4 Specifications
Outline
Model
Item
SHA40A
51
81
101
121
161
51
81
101
121
161
Nm
340
560
686
802
841
523
675
738
802
841
kgf・m
34.7
57.1
70
81.8
85.8
53.4
68.9
75.3
81.8
85.8
Allowable continuous
torque
Nm
94
158
198
237
317
160
263
330
382
382
kgf・m
9.6
16.1
20.2
24.2
32.3
16.3
26.8
33.7
39
39
Max. rotational speed*2
rpm
78.4
49.4
39.6
33.1
24.8
78.4
49.4
39.6
33.1
24.8
Nm/A
rms
25
41
51
61
81
25
41
51
61
81
kgf
・
m/A
rms
Max. current*2
A
rms
18
18
18
17.9
14.6
26.7
21.8
19.4
17.9
14.6
Allowable continuous
current
EMF constant*4
V/(rpm)
2.9
4.6
5.7
6.8
9.1
2.9
4.6
5.7
6.8
9.1
Phase resistance
(20℃)
Phase inductance
mH
1.2
GD2/4
kg・m2
5.0
13
20
28
50
5.0
13
20
28
50
kgf・cm・
s2
GD2/4
kg・m2
6.1
15
24
34
61
6.1
15
24
34
61
kgf・cm・
s2
Reduction ratio
1:51
1:81
1:101
1:121
1:161
1:51
1:81
1:101
1:121
1:161
Permissible
moment load
Nm
849
kgf・m
86.6
Nm/rad
179 x 104
kgf・
min
One-way positional
accuracy
Encoder type
Magnetic absol ute encoder
Single motor revolution
Encoder resolution
Motor multi revolution counter
2
16
65,536)
Mass
(without brake)
Mass (with brake)
kg
10.7
Environmental conditions
Operating temper ature: 0 to 40℃/Storage temperature: -20 to 60℃
Altitude: les s than 1,000 m above sea level
Motor insulation
Insulation resistance: 100MΩ or more ( by D C 500V insulation tester)
Insulation cl ass: A
Mounting direction
Can be installed in any di rection.
Protection structure
Totally enclosed self-cooled type (IP54)
SG type
Servo Drive HA-800□-6D/E-200*1
Max. torque*2
*2*3
Torque constant*2
*2*3
Inertia moment
(without brake)
Inertia moment
(with brake)
REL-230-36, REL-230-40
HA-800□-24D/E-200
2.6 4.1 5.2 6.2 8.2 2.6 4.1 5.2 6.2 8.2
A
6.0 6.0 6.0 6.0 6.0 9.0 9.0 9.0 8.8 7.2
rms
Ω 0.19
J
J
51 130 202 290 513 51 130 202 290 513
62 157 244 350 619 62 157 244 350 619
Moment stiffness
m/arc
53.2
arc-sec 50 40 40 40 40 50 40 40 40 40
217(131,072)
(
Output resolution
Pulse/rev
6,684,
672
10,616,
832
13,238,
272
15,859,
712
21,102,
592
6,684,
672
10,616,
832
13,238
,272
15,859,
712
21,102,
592
kg 9.9
Operating humidity/storage humidity: 20 to 80%RH (no condensati on)
Resistance to vibration: 25 m/s
2
(
frequency: 10 to 400Hz
)/Shock r esistance: 300 m/s
2 *5
No dust, no metal powder, no corrosive gas, no inflammable gas , no oil mist
To be used indoors, no direct sunlight
Dielectric strength: AC1,500V/1 min
The table shows typical output values of actuators.
*1: If a HA-800□-6D/E driver is combined with a SHA40A actuator, the maximum torque and allowable continuous torque are limited.
*2:
When combined with HA-800 driver.
*3: Value after temperature rise and saturation when the 500 x 500 x 25 [mm] aluminum radiation plate is installed.
*4: Value of phase induced voltage constant multiplied by 3.
*5: For testing conditio ns, ref er to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P 52).
19
1
2
3
4
5
6
7
8
9
10
11
付
Outline
SG type
Model
Item
SHA58A
SHA65A
81
101
121
161
81
101
121
161
Servo Drive
HA-800□-24D/E-200
HA-800□-24D/E-200
Nm
1924
2067
2236
2392
2400
2990
3263
3419
kgf・m
196
211
228
244
245
305
333
349
Allowable
torque
Nm
714
905
969
969
921
1149
1236
1236
Max. rotational
speed*1
Nm/A
rms
54
68
81
108
54
68
81
108
kgf
・
m/A
rms
Max. current*1
A
rms
45
39
36
30
55
55
51
41
Allowable
current
EMF constant*3
V/(rpm)
6.1
7.6
9.1
12.1
6.1
7.6
9.1
12.1
Phase resistance
(20℃)
Phase inductance
mH
0.29
0.29
Inertia
brake)
GD2/4
kg・m2
96
149
214
379
110
171
245
433
・
Inertia
brake)
GD2/4
kg・m2
106
165
237
420
120
187
268
475
・
Reduction ratio
1:81
1:101
1:121
1:161
1:81
1:101
1:121
1:161
Permissible
moment load
Nm
2180
2740
kgf・m
222
280
Nm/rad
531 x 104
741 x 104
kgf・
min
One-way positional
accuracy
Encoder type
Magnetic absol ute encoder
Single motor revolution
Encoder resolution
Output resolution
Pulse/rev
Mass
(without brake)
Mass (with brake)
kg
32
40
Environmental conditions
Operating temper ature: 0 to 40℃/Storage temperature: -20 to 60℃
Altitude: les s than 1,000 m above sea level
Motor insulation
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Insulation cl ass: A
Mounting direction
Can be installed in any di rection.
Protection structure
Totally enclosed self-cooled type (IP54)
Max. torque*1
1-4 Specifications
continuous
Torque constant*1
continuous
moment
(without
moment
(with
Moment stiffness
*1*2
*1*2
J
J
kgf・m 73 92 99 99 94 117 126 126
rpm
A
rms
Ω
kgf
cm・s2
kgf
cm・s2
m/arc
37.0 29.7 24.8 18.6 34.6 27.7 23.1 17.4
5.5 6.9 8.3 11.0 5.5 6.9 8.3 11.0
17.7 17.8 16.4 13.4 22.0 21.9 20.1 16.3
0.028 0.028
980 1520 2180 3870 1120 1740 2500 4420
1090 1690 2420 4290 1230 1910 2740 4850
158 220
arc-sec
kg
The table shows typical output values of actuators.
*1: When combined with HA-8 00 driver.
*2: Value after temperature rise and saturation when the 650 x 650 x 30 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditio ns, ref er to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P 52).
40 40 40 40 40 40 40 40
10,616,832 13,238,272 15,859,712 21,102,592 10,616,832 13,238,272 15,859,712 21,102,592
Operating humidity/storage humidity: 20 to 80%RH (no condensati on)
Resistance to vibr ation: 25 m/s
2 *4
m/s
No dust, no metal powder, no corrosive gas, no inflammable gas , no oil mist
To be used indoors, no direct sunlight
Dielectric strength: AC1,500V/1 min
217(131,072)
29.5 37.5
2
(frequency: 10 to 400Hz)/Shock res istance: 300
20
1-4 Specifications
Outline
Actuator Model
Item
SHA20A
50
80
100
120
160
REL-230-18
HA-800□-3D/E-200
Nm
73
96
107
113
120
kgf・m
7.4
9.8
10.9
11.5
12.2
Allowable continuous
torque
Nm
21
35
43
48
48
kgf・m
2.1
3.6
4.4
4.9
4.9
Max. rotational speed*1
rpm
120
75
60
50
37.5
Nm/A
rms
16
26
33
39
53
kgf・m/A
rms
1.7
2.7
3.4
4.0
5.4
Max. current*1
A
rms
6.1
5.0
4.6
4.1
3.4
Allowable continuous
current
EMF constant*3
V/(rpm)
Phase resistance
(20℃)
Ω
Phase inductance
mH
2.5
Inertia
brake)
GD2/4
kg・m2
0.21
0.53
0.82
1.2
2.1
Inertia
brake)
GD2/4
kg・m2
0.23
0.60
0.94
1.3
2.4
Reduction ratio
1:50
1:80
1:100
1:120
1:160
Permissible moment
load
Nm
187
kgf・m
19.1
Nm/rad
25.2×104
kgf・m/arc
min
One-way positional
accuracy
Repeatability
arc-sec
5
Bi-directional
repeatability
Encoder type
Magnetic absolut e encoder
Single motor revolution
Encoder resolution
Motor multi revolution counter
2
16
65,536)
Output resolution
Pulse/rev
6,553,600
10,485,760
13,107200
15,728,640
20,971,520
Mass
(without brake)
Mass (with brake)
kg
2.7
Environmental conditions
Operating temper ature: 0 to 40℃/Storage temperature: -20 to 60℃
Altitude: les s than 1,000 m above sea level
Motor insulation
Mounting direction
Can be installed in any di rection
Protection structure
Totally enclosed self-cooled type (IP54)
CG type
Servo Drive
Max. torque*1
*1*2
Torque constant*1
*1*2
moment
(without
moment
(with
A
2.1 2.1 2.1 2.0 1.7
rms
1.8 2.9 3.7 4.4 5.9
1.4
J kgf・cm・s2 2.1 5.4 8.0 12 22
J kgf・cm・s2 2.4 6.1 9.6 14 24
Moment stiffness
arc-sec 60 50 50 50 50
arc-sec 75 30 30 30 30
kg 2.6
Operating humidity/storage humidity: 20 to 80%RH (no condensati on)
Resistance to vibrat ion: 25 m/s
300 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas, no oil mist
To be used indoors, no direct sunlight
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Dielectric strength: AC1,500V/1 min
Insulation cl ass: A
The table shows typical output values of actuators.
*1: Typical characteristics when combined with our HA-800 driver.
*2: Value after temperature rise and saturation when the 350 x 350 x 18 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditions, refer to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P52).
21
2 *4
7.5
±
217(131,072)
(
2
(frequency: 10 to 400H z)/Shock resistance:
1
2
3
4
5
6
7
8
9
10
11
付
Outline
CG type
Item
SHA25A(Motor input voltage 100V)
SHA25A(Motor input voltage 200V)
50
80
100
120
160
50
80
100
120
160
REL-230-18
HA-800□-6D/E-100*1
REL-230-18
HA-800□-3D/E-200
Nm
127
178
204
217
229
127
178
204
217
229
kgf・m
13
18.2
20.8
22.1
23.4
13
18.2
20.8
22.1
23.4
Allowable continuous
torque
Nm
34
57
72
81
81
40
66
81
81
81
kgf・m
3.5
5.8
7.3
8.2
8.2
4.1
6.8
8.2
8.2
8.2
Max. rotational speed*1
rpm
96
60
48
40
30
112
70
56
46.7
35
Nm/A
rms
10.9
17.7
22
27
35
19
31
38
46
61
kgf・
m/A
rms
Allowable continuous
current
EMF constant*3
V/(rpm)
1.2
2.0
2.5
3.0
4.0
2.1
3.4
4.3
5.2
6.9
Phase resistance
(20℃)
Ω
Phase inductance
mH
1.0
3.0
Inertia
brake)
GD2/4
kg・m2
0.50
1.3
2.0
2.9
5.1
0.50
1.3
2.0
2.9
5.1
・
Inertia
(with brake)
GD2/4
kg・m2
0.60
1.5
2.4
3.4
6.1
0.60
1.5
2.4
3.4
6.1
kgf・cm・
s2
Reduction ratio
mH
50:1
80:1
120:1
1:120
160:1
50:1
80:1
120:1
1:120
160:1
Nm
258
kgf・m
26.3
Nm/rad
39.2×104
kgf・m/arc
min
One-way positional
accuracy
Repeatability
arc-sec
5
Bi-directional positional
accuracy
Encoder type
Magnetic absolute encoder
Single motor revolution
Encoder resolution
Motor multi revolution counter
2
16
65,536)
6,553,
600
10,485,
760
13,107,
200
15,728,
640
20,971,
520
6,553,
600
10,485,
760
13,107,
200
15,728,
640
20,971,
520
Mass
(without brake)
Mass (with brake)
kg
4.1
Environmental conditions
Motor insulation
Mounting direction
Can be installed in any direction
Protection structure
Totally enclosed self-cooled type (IP54)
1-4 Specifications
Model
Servo Drive
Max. torque*1
*1*2
Torque constant*1
Max. current*1
*1*2
moment
(without
moment
Permissible moment load
Moment stiffness
J
J
REL-230-36
1.1 1.8 2.3 2.7 3.6 1.9 3.1 3.9 4.7 6.3
A
rms
A
rms
kgf・cm
s2
15.1 13.2 12.2 11.0 9.0 8.7 7.6 7.0 6.3 5.2
4.7 4.7 4.7 4.5 3.7 3.0 3.0 3.0 2.6 2.1
0.4 1.2
5.1 13 20 29 52 5.1 13 20 29 52
6.1 16 24 35 62 6.1 16 24 35 62
11.6
REL-230-36
arc-sec
arc-sec
Output resolution
Pulse/rev
kg 3.95
The table shows typical output values of actuators.
*1: Typical characteristics when combined (driven by ideal sine wave) with our drivers.
*2: Value after temperature rise and saturation when the 350 x 350 x 18 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditions, refer to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P52).
50 40 40 40 40 50 40 40 40 40
±
60 25 25 25 25 60 25 25 25 25
217(131,072)
(
Operating temperature: 0 to 40℃/Storage temperature: -20 to 60℃
Operating humidity/storage humidity: 20 to 80%RH (no condensation)
Resistance to vibration: 25 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas, no oil mist
To be used indoors, no direct sunlight
Altitude: less than 1,000 m above sea level
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Dielectric strength: AC1,500V/1 min
Insulation class: A
2
(frequency: 10 to 400Hz)/Shock resistance: 300 m/s
2 *4
22
1-4 Specifications
Outline
Model
Item
SHA32A
50
80
100
120
160
REL-230-18
HA-800□-6D/E-200
Nm
281
395
433
459
484
kgf・m
28.7
40.3
44.2
46.8
49.4
Allowable continuous
torque
Nm
90
151
178
178
178
kgf・m
9.2
15.4
18.2
18.2
18.2
Max. rotational speed*1
rpm
96
60
48
40
30
Nm/A
rms
20
33
41
49
66
kgf・
m/A
rms
Max. current*1
A
rms
17.7
15.4
13.7
12.2
10
Allowable continuous
current
Ω
Max. current*1
mH
1.4
Inertia
brake)
GD2/4
kg・m2
1.7
4.3
6.7
9.7
17
・
Inertia
brake)
GD2/4
kg・m2
2.0
5.1
7.9
11
20
・
Reduction ratio
50:1
80:1
100:1
120:1
160:1
Nm
580
kgf・m
59.2
Nm/rad
100×104
kgf・
min
One-way positional
accuracy
Repeatability
arc-sec
4
Bi-directional
repeatability
Encoder type
Magnetic absolute encoder
Single motor rev olution
Encoder resolution
Motor multi revolution
counter
Output resolution
Pulse/rev
6,553,600
10,485,760
13,107,200
15,728,640
20,971,520
Mass
(without brake)
Mass (with brake)
kg
8.0
Environmental conditions
Motor insulation
Mounting direction
Can be installed in any direction.
Protection structure
Totally enclosed self-cooled type (IP54)
CG type
Servo Drive
REL-230-36
Max. torque*1
*1*2
Torque constant*1
*1*2
A
rms
2.1 3.4 4.2 5.0 6.7
6.0 6.0 5.7 5.0 4.1
EMF constant*3 V/(rpm) 2.3 3.7 4.6 5.5 7.4
Phase resistance(20℃)
moment
(without
J
moment
(with
J
0.33
kgf・cm
s2
kgf・cm
s2
17 44 68 99 175
20 52 81 116 207
Permissible moment load
The table shows typical output values of actuators.
*1: Typical characteristics when used with HA-800.
*2: Value after temperature rise and saturation when the 400 x 400 x 20 [mm] aluminum radiation plate is installed.
*3: Value of phase induced voltage constant multiplied by 3.
*4: For testing conditions, refer to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P52).
23
Moment stiffness
m/arc
arc-sec
arc-sec
40 30 30 30 30
60 25 25 25 25
29.6
217(131,072)
216(65,536)
kg 7.7
Operating temperature: 0 to 40℃/Storage temperature: -20 to 60℃
Operating humidit y/storage humidity: 20 to 80%RH (no condensation)
Resistance to vibration: 25 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas, no oil mist
To be used indoors, no direct sunlight
Altitude: less than 1,000 m above sea level
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Dielectric strength: AC1,500V/1 min
Insulation class: A
2
(frequency: 10 to 400Hz)/Shock resistance: 300 m/s
±
2 *4
1
2
3
4
5
6
7
8
9
10
11
付
Outline
CG type
Model/Ratio
Item
SHA40A
50
80
100
120
160
50
80
100
120
160
REL-230-36, REL-230-40
HA-800□-6D/E-200
REL-230-36, REL-230-40
HA-800□-24D/E-200
Nm
333
548
686
802
841
523
675
738
802
841
kgf・m
34.0
55.9
70.0
81.8
85.8
53.4
68.9
75.3
81.8
85.8
Allowable continuous
torque
Nm
92
156
196
235
315
157
260
327
382
382
kgf・m
9.4
15.9
20.0
24.0
32.1
16.0
26.5
33.3
39
39
Nm/A
rms
25
40
50
60
80
25
40
50
60
80
kgf・
m/A
rms
A
Allowable continuous
current
EMF constant
V/(rpm)
2.8
4.5
5.6
6.7
9.0
2.8
4.5
5.6
6.7
9.0
Phase resistance
(20℃)
Phase inductance
mH
1.2
Inertia
brake)
GD2/4
kg・m2
4.8
12
19
27
49
4.8
12
19
27
49
・
Inertia
(with brake)
GD2/4
kg・m2
5.8
15
23
33
59
5.8
15
23
33
59
kgf・cm・
s2
Permissible moment
load
Nm
849
kgf・m
86.6
Nm/rad
179×104
kgf・
min
One-way positional
accuracy
Repeatability
arc-sec
4
Bi-directional
repeatability
Encoder type
Magnetic absolute encoder
Single motor
Encoder resolution
Motor multi revolution
count
6,553,
600
10,485,
760
13,107,
200
15,728,
640
20,971,
520
6,553,
600
10,485,
760
13,107,
200
15,728,
640
20,971,
520
Mass
(without brake)
Mass (with brake)
kg
13.8
Environmental conditions
Altitude: less than 1,000 m above sea level
Motor insulation
Mounting direction
Can be installed in any direction.
Protection structure
Totally enclosed self-cooled type (IP54)
1-4 Specifications
Combined driver
Max. torque*2
*2*3
Max. rotational speed*2 rpm 80 50 40 33.3 25 80 50 40 33.3 25
Torque constant*2
Max. current*1
*1*2
moment
(without
moment
Moment stiffness
rms
A
rms
Ω 0.19
kgf・cm
J
J
s2
m/arc
2.5 4.1 5.1 6.1 8.2 2.5 4.1 5.1 6.1 8.2
18 18 18 17.6 14.3 27.2 22 19.6 18 14.7
6.0 6.0 6.0 6.0 6.0 9.0 9.0 9.0 8.8 7.2
49 124 194 280 497 49 124 194 280 497
59 150 235 338 601 59 150 235 338 601
*1
53.2
arc-sec
arc-sec
revolution
Output resolution
217(131,072)
216(65,536)
Pulse/rev
kg 13.0
The table shows typical output values of actuators.
*1: If a HA-800□-6D/E driver is combined with a SHA40A actuator, the maximum torque and allowable continuous torque are limited.
*2: Typical characteristics when combined (driven by ideal sine wave) with our drivers.
*3: Value after temperature rise and saturation when the 500 x 500 x 25 [mm] aluminum radiation plate is installed.
*4: Value of phase induced voltage constant multiplied by 3.
*5: For testing conditions, refer to [1-12 Shock resistance] (P51) and [1-13 Vibration resistance ] (P52).
40 30 30 30 30 40 30 30 30 30
±
50 20 20 20 20 50 20 20 20 20
Operating temperature: 0 to 40℃/Storage temperature: -20 to 60℃
Operating humidity/storage humidity: 20 to 80%RH (no condensation)
Resistance to vibration: 25 m/s
No dust, no metal powder, no corrosive gas, no inflammable gas, no oil mist
To be used indoors, no direct sunlight
Insulation resistance: 100MΩ or more (by DC500V insulation tester)
Dielectric strength: AC1,500V/1 min
Insulation class: A
2
(frequency: 10 to 400Hz)/S hock resistance: 300 m/s
2 *4
24
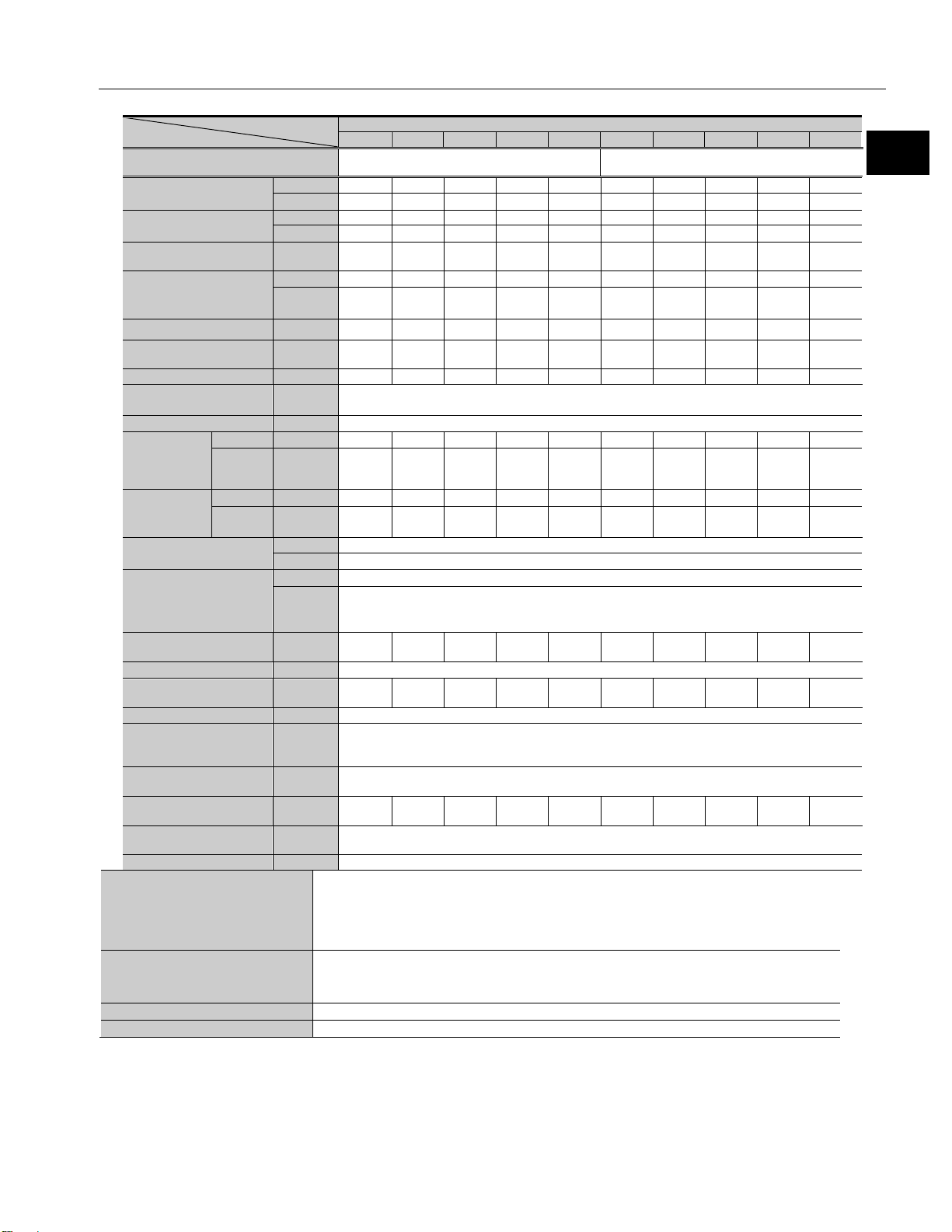
1-5 Motor shaft brake
Outline
Model
51
81
101
121
161
Dry non-excitation actuation type (without power-
saving control)
Brake excitation
voltage
Current
(at 20℃)
Current
(at 20℃)
(GD2/4)
kg·m2
(J)
kgf·cm·s2
Allowable number
of normal stops*5
Allowable number
stops*6
11
51
81
101
121
161
11
51
81
101
121
161
Brake excitation
voltage
Current
(at 20℃)
Current
(at 20℃)
(GD2/4)
kg·m2
(J)
kgf·cm·s2
Allowable number
of normal stops*5
Allowable number
stops*6
1-5 Motor shaft brake
The brake is used to hold the motor shaft in place when the power is turned off. With smaller sizes (SHA25A, 32A), the
actuator's built-in circuit controls the voltage supplied to the brake in order to reduce the power consumption while the brake is
actuated.
Be sure to use a DC power supply having proper brake excitation voltage and capable of outputting enough current for the
brake actuation (release).
Specifications
SG/HP type
Item
Type
V DC24V ± 10% (no polarity)*1
SHA20A
consumption
during suction
consumption
during holding
Holding torqu e*3
Inertia moment*3
(Actuator total)
(with brake)
Mass (with brake)*4 kg 2.1
of emergency
A
0.37
rms
A
Sam e as curre nt consumption during suctio n
rms
Nm 31 49 61 73 97
kgf·m 3.1 5.0 6.2 7.4 9.9
0.26 0.65 1.0 1.4 2.6
2.7 6.6 10 15 26
100,000 times
200 times
Item
Type Dry non-excitation actuation type (with power-saving control)
consumption
during suction
consumption
during holding
Model
V DC24V ± 10% (no polarity)*1
A
0.8*2 0.8*2
rms
A
0.3 0.3
rms
SHA25A SHA32A
Holding torqu e*3
Inertia moment*3
(Actuator total)
(with brake)
Mass (with brake)*4 kg 5.1 3.1 9.7 6.2
of emergency
25
Nm 11 51 81 101 121 161 22 102 162 202 242 322
kgf·m 1.1 5.2 8.3 10 12 16 2.2 10 17 21 25 33
0.034 0.66 1.7 2.6 3.7 6.6 1.7 2.3 5.9 9.2 13 23
0.35 6.7 17 26 38 67 17 24 60 94 135 238
100,000 times
200 times
1
2
3
4
5
6
7
8
9
10
11
付
Outline
SG
Model
Item
SHA40A
SHA58A
51
81
101
121
161
81
101
121
161
Type Dry non-excitation actuation type (without power-saving control)
Brake excitation voltage
V
DC24V ± 10% (no polarity)*1
Current consumption
during suction (at 20℃)
Current consumption
during holding (at 20℃)
Nm
204
324
404
484
644
1220
1520
1820
2420
kgf·m
21
33
41
49
66
124
155
185
246
(GD2/4)
kg·m2
(J)
kgf·cm·s2
Mass (with brake)*4
kg
10.7
32
Allowable number of
normal stops*5
Allowable number of
emergency stops*6
Model
Item
SHA65A
81
101
121
161
Dry non-excitation actuation type (wi tho ut
power-saving control)
Brake excitation voltage
V
DC24V±10% (no polarity)*1
Current consumption
during suction (at 20℃)
Current consumption
during holding (at 20℃)
Same as current consumption during
suction
Nm
1220
1520
1820
2420
kgf·m
124
155
185
246
(GD2/4)
kg·m2
(J)
kgf·cm·s2
Mass (with brake)*4
kg
40
Allowable number of
normal stops*5
Allowable number of
emergency stops*6
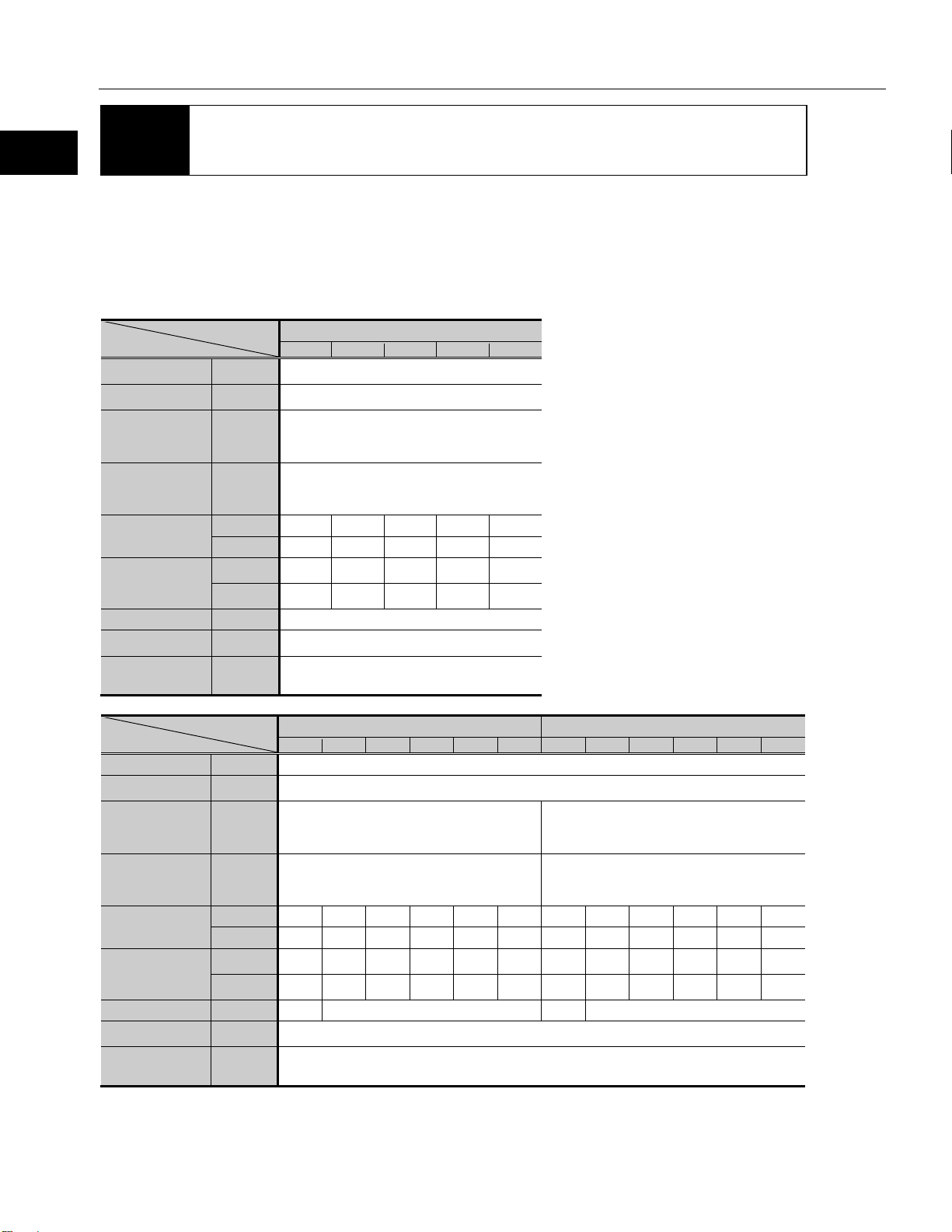
Model
50
80
100
120
160
50
80
100
120
160
Dry non-excitation actuation type (without power-
saving control)
Dry non-excitat ion actuation type (with power-
saving control)
Brake excitation
voltage
Current consumption
20℃)
Current consumption
20℃)
(GD2/4)
kg·m2
(J)
kgf·cm·s2
Allowable number of
normal stops*5
Allowable number of
emergency stops*6
Holding torqu e*3
Inertia moment*3
(Actuator total)
(With brake)
Type
A
0.7 0.9
rms
A
Same as current consumption during suct io n
rms
6.1 15 24 34 61 106 165 237 420
62 157 244 350 619 1090 1690 2420 4290
100,000 times
200 times
A
0.9
rms
1-5 Motor shaft brake
A
rms
Holding torqu e*3
Inertia moment*3
(Actuator total)
(With brake)
100,000 times
200 times
120 187 268 475
1230 1910 2740 4850
CG
type
Item
Type
V
during suction (at
during holding (at
Holding torqu e*3
Inertia moment*3
(Actuator total)
(With brake)
Mass (with brake)*4 kg 2.7 4.1
A
0.37 0.8 *2
rms
A
Same as current consum pt io n during suction 0.3
rms
Nm
kgf·m
30 48 60
3.1 4.9 6.1
0.23 0.6 0.94
2.4 6.1 9.6
100,000 times
200 times
SHA20A SHA25A
DC24V±10%(no polarity)*1
72 96 50 80 100 120 160
7.3 9.8 5.1 8.2 10 12 16
1.3 2.4 0.60 1.5 2.4 3.4 6.1
14 24 6.1 16 24 35 62
26
1-5 Motor shaft brake
Outline
Model
50
80
100
120
160
50
80
100
120
160
Dry non-excitation actuation type (with power-
saving control)
Dry non-excitat ion actuation type (without
power-saving control)
Brake excitation
voltage
Current consumption
20℃)
Current consumption
20℃)
(GD2/4)
kg·m2
(J)
kgf·cm·s2
Allowable number of
normal stops*5
Allowable number of
emergency stops*6
WARNING
Item
SHA32A SHA40A
Type
during suction (at
during holding (at
Holding torqu e*3
Inertia moment*3
(Actuator total)
(With brake)
Mass (with brake)*4 kg 8.0 13.8
V DC24V±10%(no polari t y)*1
A
0.8 *2 0.7
rms
A
0.3 Sam e as cur re nt cons um pt io n during suction
rms
Nm 100 160 200 240 320 200 320 400 480 640
kgf·m 10 16 20 24 33 20 33 41 49 65
2.0 5.1 7.9 11 20 5.8 15 23 33 59
20 52 81 116 207 59 150 235 338 601
100,000 times
200 times
*1: Power supply is user’s responsibility. Use a power supply capable of outputting enough current consumption during suction for the brake.
*2: The durat i on for current c onsum ption during suction is 0.5 second or less for the power supply of DC24V ± 10%.
*3: The values are converted for the output shaft of the actuator.
*4: The values present total mass of the actuator.
*5: The s ervice tim e for normal holdi ng is assured when the brake activates at motor shaft rotation speed of 150 rpm or less.
*6: The s ervice time for emergency stop is assured when the brake activates at motor speed of 3,000 rpm or less provided the load inertia
moment is 3 times of less than that of the actuator.
The motor shaft holding brake cannot be used for deceleration.
Do not use the holding brake more than the allowable number of normal brakings (100,000
times at the motor shaft rotation speed of 150 rpm or less) or allowable number of
emergency stops (200 times with the motor shaft rotation speed of 3,000 rpm, provided
the load inertia moment is 3 times or less than that of the actuator).
Exceeding the allowable number of normal stops or allowable number of emergency stops
may deteriorate holding torque, and may co nsequently fail to properly serve as a brake.
27
1
2
3
4
5
6
7
8
9
10
11
付
Outline
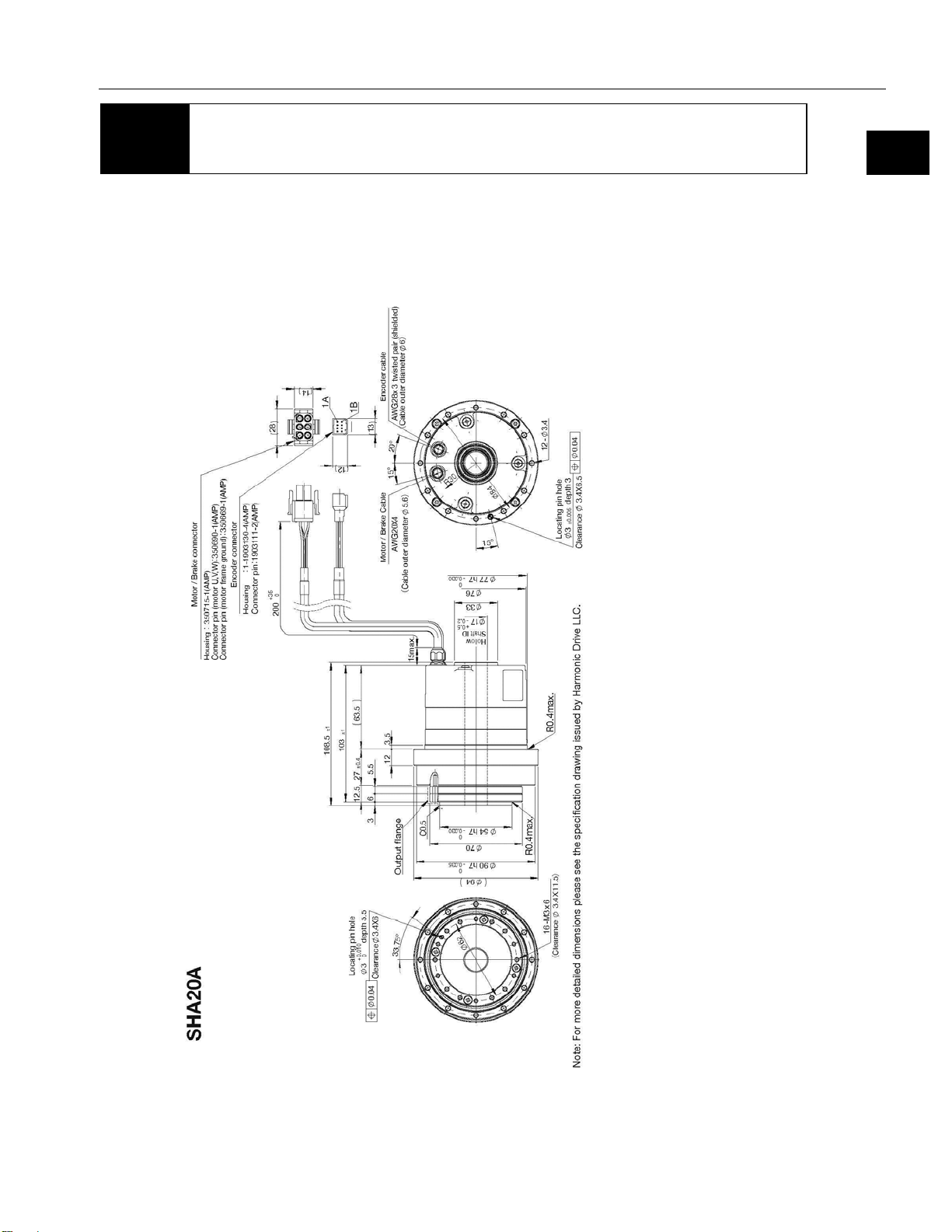
Note: The dimension toleranc es that are not specified vary depending on the manufacturing method. Pleas e ch eck t he
confirmation drawing or contact us
1-6 External dimensions
SHA20A-SG
Unit: mm
1-6 External dimensions
for dimension tolerances not shown
28
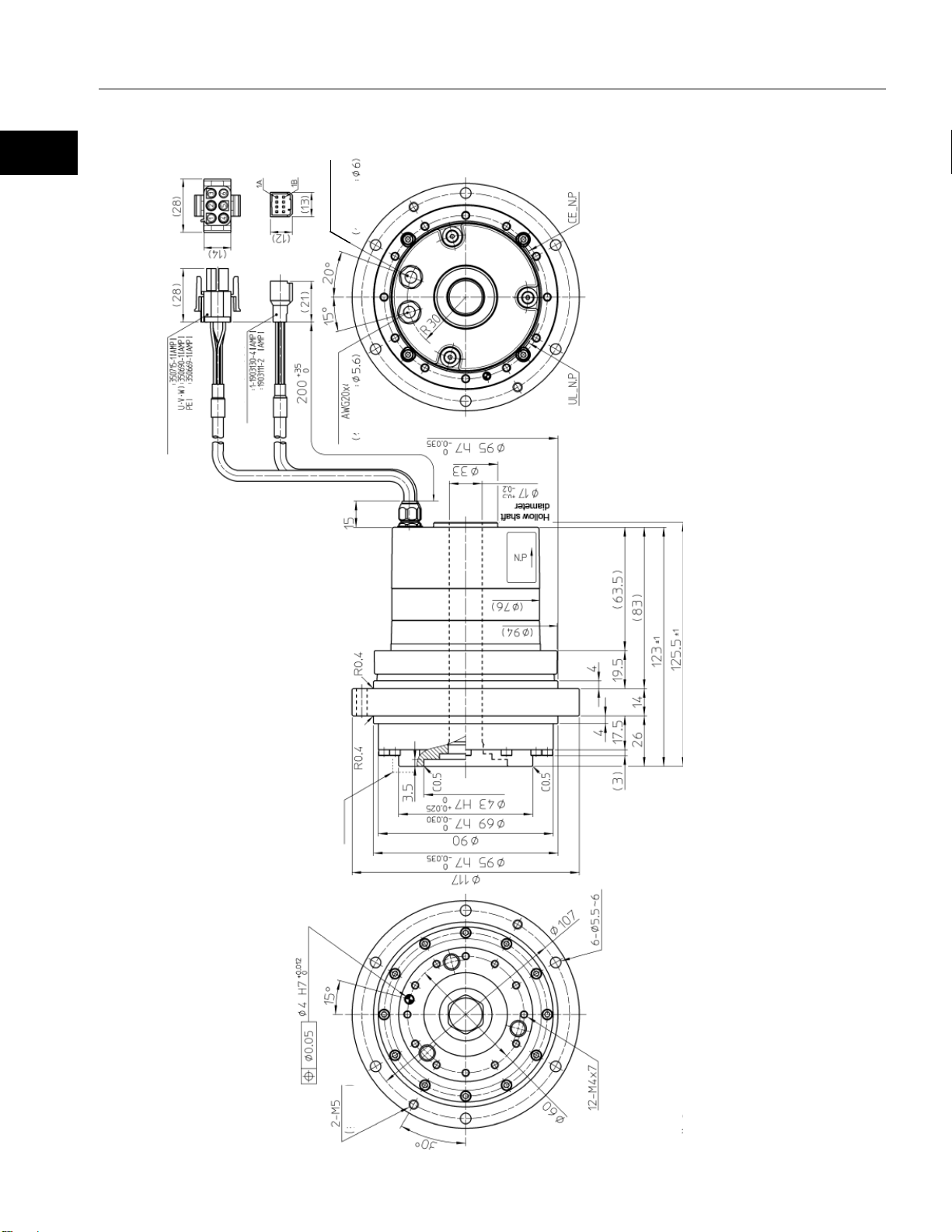
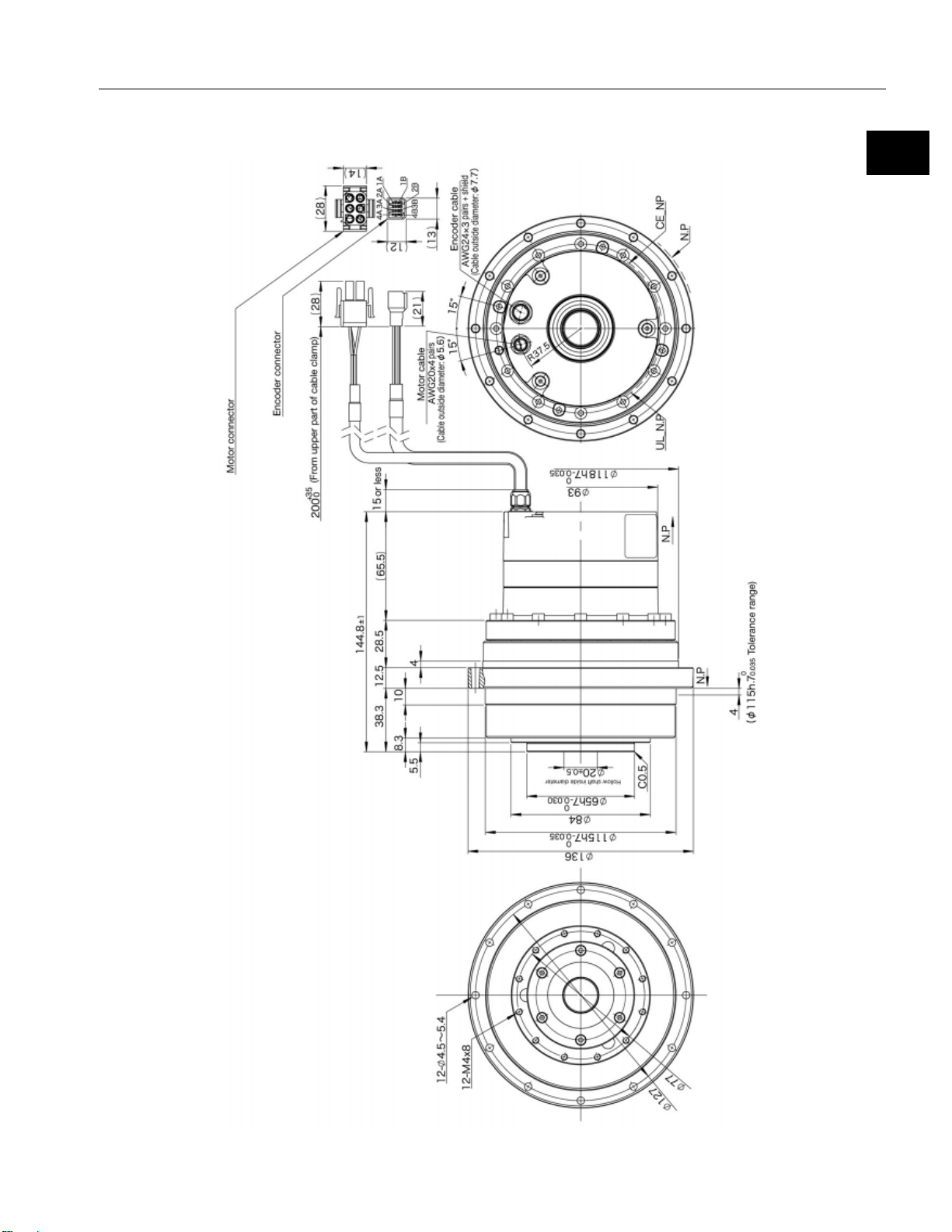
1-6 External dimensions
Outline
Encoder cable
AWG28 x 3 sets
with shield
Cable outer
diameter
Motor connector
Housing
Pin contact (Motor
Pin contact (Motor
Encoder connector
Housing
Tab contact
Motor cable
Cable outer
diameter
4-core
Output rotary unit
Jacking
holes
Note: The dimension toleranc es that are not specified vary depending on the manufacturing method. P leas e chec k t he
confirmation drawing or contact us for dimension tolerances not shown
LipC0.5 chamfering
Depth 7
or less
or less
or less
SHA20A-CG
Unit: mm
29
1
2
3
4
5
6
7
8
9
10
11
付
Outline
Note: The dimension tolerances that are not specified vary depending on the manufacturing method. Please check the
confirmation drawing or contact us for dimension toleranc
SHA25A-HP Unit: mm
1-6 External dimensions
es not shown
30
 Loading...
Loading...