



ABOUT THIS MANUAL
Thank you very much for purchasing HANYOUN NUX product.
This instruction manual includes details of product functionality, installation method,
cautions, usage, and others. Read and be fully aware of contents before use of product.
Also, provide this manual in order for end user use, and at easily accessible place
anytime.
* Contents of this manual are subject to change without prior notice.
* For questions, and errors regarding contents of this manual,
contact our company or business offices.
* Unpermitted reprinting and duplication of all or part of contents of
this manual are strictly prohibited.
■Services (A/S)
* For A/S request of this company’s product, please contact outlets,
sales office nearby or head office of our company.
* If you like onsite visit service, please send the request after speaking
Multi Loop Controller
with A/S Center personnel on the phone.
* Prior to sending request, please check if questions and answers for the same
problems are posted in the FAQ section of homepage.
HANYOUNG NUX
28, 71Beon-gil, Gilpa-ro, Nam-gu, Incheon, 402-205, Korea
TEL : (032)867-0941 (main phone line)
FAX : (032) 868-5899
URL : http://www.hynux.com
E-mail : sdt@hynux.com
TABLE OF CONTENTS
1. Before starting
2. Installation
3. Run
4. Specifications
1.1. Overview
1.2. Product verification
1.3. Safety cautions
2.1. Installation location and cautions
2.2 Exterior dimensions of product
2.3 Connection diagram 8
2.4 Power supply and communications interface(RS485/RS232C)
2.5 Event output unit connections
3.1 Protocol composition
3.2 Register composition
3.2.1 ML-D2H register composition
3.2.2 ML-D2H register description
3.2.3 ML-D4의 register composition
3.2.4 ML-D4 register description
3.3 Manipulation and working
3.3.1 Input section
3.3.2 Control section
3.3.3 Event section
3.3.4 Status indication and set up
3.3.5 Warning occurrence and handling
11
12
18
18
20
25
27
32
32
34
40
44
47
48
2
Before staring Installation Operation Specifications
2
4
5
6
9
1
1. BEFORE STARTING
1.1 Overview
■ML Series product family
Multi-channel temperature control system (ML-D, ML-D2H), event output (ML-E)
■ Module composition method (Individual product is called “Unit”)
ML Series products can be made up as one module by connecting maximum of 31 units without wiring
work, and only one Unit is connected to power cable and communications line (RS485). Event output
(ML-E) is not included in maximum connection quantity, and only one Unit is connected during module
composition and used.
■ Product run through communications connection
For RS232C and RS485 communications method, this product supports PC-Link, PC-Link with SUM,
Modbus, ASCII/RTU protocols. Through individual communication with product, it is operated with
reading/writing of Register address defined based on function. Basic functions such as control and
monitoring can be tested or operated using operating program provided in the computer.
RS485 communications : For use, connect to communications terminal at low part, and this standard is
used when operating multiple units since communications are achieved only
through address set as switch in front side.
RS232C communications : For use, connect to Loader Jack at front part, and only connected unit is
communicated regardless of front side switch setup. It is for unit’s initial setting.
■ Input type
Thermocouple (12 types) : K, J, E, T, R, B, S, L, N, U, W, PL2
RTD (2 types) : Pt100, KPt100
DC voltage (3 types) : 0 – 10 V, 1 -5 V, 0 – 100 mV
Direct current (4 – 20 mA) : Set input type as direct current (1 -5 V), attach 250 Ω of electric resistance
at both ends of input terminal
Current Transformer (CT) : 2 channel, AC 1 – 50A (primary current measuring range), apply only to ML-D2H
■ Control output type
Depending on output type of model composition, fixed in one among REALY, voltage pulse (SSR), and
Multi Loop Controller
current output (SCR).
■ Control method
2 DOF (Degree of Freedom) PID control (auto tuning support), ON/OFF control
ML-D2H: 2 Channel, Universal control (Selectable Heating or cooling control) or Heating/Cooling
simultaneous controlling
ML-D4: 4 Channel, Universal control (Selectable Heating or cooling control)
■ Installation
Can attach onto panel by fixing in DIN 35 mm standard rail or using screw
1.2 Product verification
For product purchase, please first verify desired specifications, and then damages in exterior and parts
insufficiency. And contact sales department of this company if found different specifications, exterior damage, or
parts insufficiency.
ML - SERIES
Module Type Temperature Control System
INSTRUCTION MANUAL
Body
6-pin terminal
4 EA
5-pin terminal
1 EA
2
RS232C
communications cable
(optional)
Instruction manual
1.2.1 Model composition
■ Module type temperature controller (ML-D2H)
Model Code Details
ML-D 2 H ☐ Module type temperature controller
Number of
channels
Function H
Output type
█ Module type temperature controller (ML-D4)
Model Code Details
ML-D ☐ ☐ Module type temperature control system
Number of
channels
Output type
Ex: Temperature control system 4 channel relay output : ML-D4M
2 2 channel
Heating/cooling control (simultaneous), heater break
alarm (HBA)
OUT1
(heating)
MM
OUT2
(cooling)
OUT1
(heating)
SM
OUT2
(cooling)
OUT1
(heating)
SS
OUT2
(cooling)
4 4 channel
M Relay output
S SSR output (12 V d.c.)
C SCR output (4 -20 mA d.c.)
Relay output
SSR / SCR (4 -20 mA d.c.)
parameter optional output
Relay output
SSR / SCR (4 -20 mA d.c.)
parameter optional output
Before staring Installation Operation Specifications
█ Module type event output (ML-E)
Model Code Details
ML- E Module type event output unit
3

1.3. Safety Cautions
1.3.1 Cautions for safety
● For protection and safety of product and system connected to product,
please use product according to safety instructions of this manual.
● The company will not be held responsible for all safety related issues and loss caused by
carelessness and others, for use or treatment not following directions of instruction manual.
● For protection and safety of product and system connected to product, if required to install
additional safety circuit and others, please make sure to install on external side of this product.
● Do not disassemble, repair, and renovate at self discretion,
as it may cause product damage and malfunctions.
● Do not give shock to product, this can cause product damage or malfunction
1.3.2 Quality assurance
● Unless specified in terms of quality assurance of this company, no guarantee or compensation
will be provided for this product.
● If damage is caused to user or third party due to defects and inevitable accidents that are
impossible to predict by this company, the company, on any occasion, will not be responsible
for loss, indirect damages, and others
1.3.3 About quality assurance terms of this product
● Product warranty period is one year from purchase date of this product, and for breakdowns
occurred during normal usage according to this instruction manual, free repair service will be
provided for such product only.
● For repair to breakdowns occurred after warranty expiration of this product,
it will be repaired at cost (actual expense), based on company specified guidelines.
● For problems below, repairs will be provided at cost even for breakdown during
Multi Loop Controller
warranty repair period.
- Breakdown due to user’s fault
- Breakdown due to natural disasters
- Breakdown due to transfer and others after product installation
- Breakdown due to improper product modifications or losses
- Breakdown due to power supply problem such as power supply instability
● If A/S is required due to breakdown and others, please contact purchase outlet and
our company sales department.
4

2. Installation
2.1 Installation place and cautions
2.1.1 Installation place
● To avoid risk of electric shock, use after panel penal is installed to this product.
● Do not install product at following places.
- Place that people can come into contact with terminal without awareness.
- Place directly exposed to mechanical vibrations or shocks
- Place exposed to corrosive gas or combustible gas
- Place with large change of temperatures
- Place with overly high temperature or low temperature
- Place exposed with direct sun light
- Place greatly influenced by electronic wave
- Place high in humidity
- Place with combustible items in surroundings in the event of fire
- Place with a lot of dust or salinity
2.1.2 Caution
● In case of wiring, cut off power sources of all instruments before start of wiring work
● This product operates at DC24 V. There is danger of electric shocks and fire if other than
rated power supply is used.
●To use ML Series as one module by connecting several units, connect power to only one unit.
● When connecting DC 24 V power source, use rated power supply by calculating total power
consumption of module to use. Using power supply less than total power consumption of
module can cause abnormal run and malfunction.
● Do not operate with wet hands as there is risk of electric shocks.
● For installation and usage, follow directions specified in instruction manual.
● Do not supply power before connection for devices of this product is completed.
● Do not block heat opening of this product as it can cause breakdown.
● Make sure not to touch terminal when current is flowing as there is risk of electric shock.
Before staring Installation Operation Specifications
100
100
• For module body installation
mm
or separation, please secure
proper interval of over 100 mm
considering communications
terminal connector and others.
mm
5

2.2 Connection diagram
2.2.1 Name of each part
█ ML-D2H
③
④
⑤
⑥
⑨
█ ML-D4
Multi Loop Controller
③
④
⑤
⑥
⑨
No. Name Function
①
① Status indication LED
②
② Loader Jack
③ Unit address switch
⑦
Unit extension
④
address switch
⑤
⑧
※ If unit extension address switch is positioned at “+16” and unit address
switch is positioned at “1,” RS485 communications address is set to “1+16=17.”
CH 1 terminal
⑥
⑦
CH 2 terminal
⑧
Power source and
⑨
communications
termina
Power supply, communication, event, control
output, heater break event indication
RS232C communication input terminal
RS485 communication address setting switch
(0~15)
RS485 communication extension address setting
switch (0 /+16)
Temperature input and current transformer (CT)
input terminal
OUT 1: heating control output terminal
OUT 2: cooling control output terminal
Temperature input and current transformer (CT)
input terminal
OUT 1: heating control output terminal
OUT 2: cooling control output terminal
RS485 communications and 24 V d.c. input
terminal
①
No. Name Function
②
① Status indication LED
② Loader Jack RS232C communication input terminal
⑦
③ Unit address switch
Unit extension
④
address switch
⑤ CH 1 terminal
⑧
⑥
CH 2 terminal
⑦ CH 3 terminal
⑧ CH 4 terminal
Power supply and
⑨
communications
terminal
※ If unit extension address switch is positioned at “+16” and unit address
switch is positioned at “1,” RS485 communications address is set to “1+16=17.”
Power supply, communication, event,
control output indication
RS485 communication address setting switch
(0~15)
RS485 communication extension address
setting switch (0 /+16)
Input signal (sensor)
Temperature input and control output terminal
RS485 communications and
24 V d.c. input terminal
6
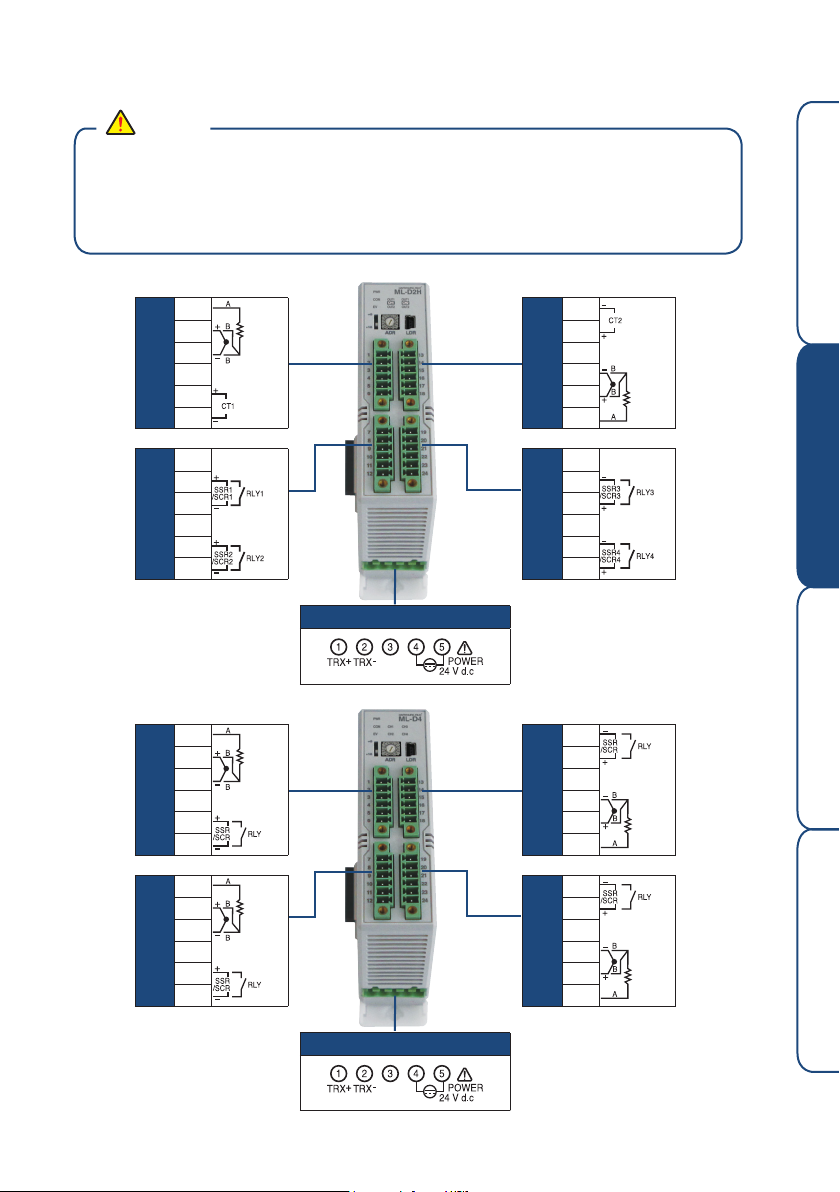
2.2.2 Connection method
Caution
● Before connecting devices, make sure that current is not flowing through connection cable
by cutting off voltage to all instruments to be supplied with power
● As there is danger of electric shock while current is flowing, make sure not to touch terminal.
● Make sure to connect after disconnecting power source voltage.
● For users, do not touch other than above mentioned terminals here.
● ML-D2H
Before staring Installation Operation Specifications
● ML-D4
1 CH
1 CH
1 CH
2 CH
1
2
3
4
5
6
7
OUT1
8
9
10
OUT2
11
12
Power supply section
13
14
15
2 CH
16
17
18
19
OUT2
20
21
2 CH
22
OUT1
23
24
※ 24 V d.c. terminal
has no polarity of (+)
(-) for power supply
connection
1
INPUT
2
3
4
OUT
5
6
7
INPUT
8
9
10
11
OUT
12
3 CH
4 CH
13
14
15
16
17
18
19
20
21
22
23
24
OUT
INPUT
OUT
INPUT
Power supply section
※ 24 V d.c. terminal has
no polarity of (+) (-) for
power supply connection
7
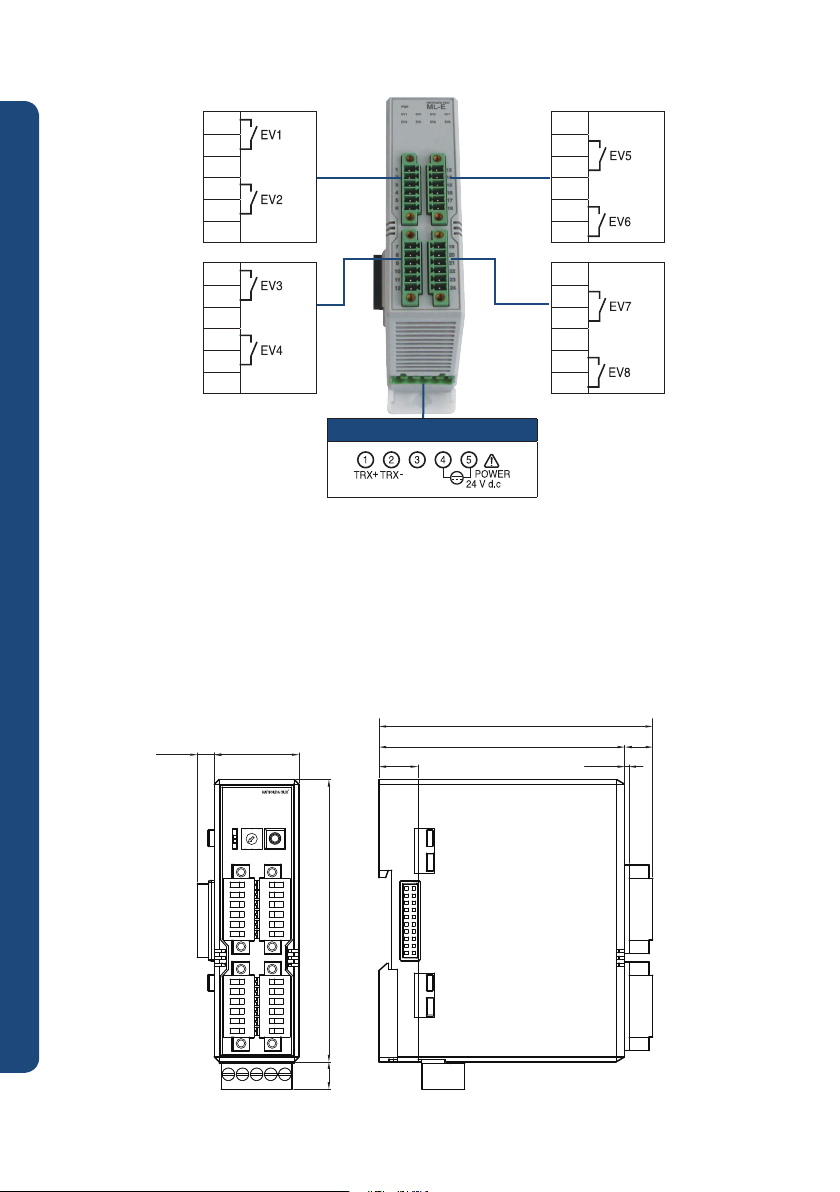
● ML-E
1
2
3
4
5
6
7
8
9
10
11
12
2 . 3 E x t e r i o r d i m e n s i o n
Multi Loop Controller
30.006.00
Power supply section
87.00
13
14
15
16
17
18
19
20
21
22
23
24
※ 24 V d.c. terminal
has no polarity of (+)
(-) for power supply
connection
Unit : ㎜
96.90
9.90
1.5013.75
PWR
ML-D4
COMEVCH1
CH3
CH2
CH4
+0
+16
ADR
LDR
100.009.70
The dimensions of ML-D2H and ML-D4 are same
※
8

2.4 Power supply and communications interface (RS485/RS232C)
Master
TRX+
TRX-
TRX+
TRX-
TRX+
TRX-
TRX+
TRX-
24 V
GND
24 V
GND
24 V
GND
24 V
GND
(24 V DC)
2.4.1 Power supply and communications interface
● When using ML Series as one module by connecting several units, supply power cable and
communications line to only one unit. Required maximum power capacity is 32 units X 7 W= 224 W
when making up 32 unit module. (Refer to power supply specification)
<Example of proper use>
● 2 wire type communication and power source connection
Master
Terminating
resisters
TRX+
TRX-
(24 V DC)
24 V
<Example of incorrect use>
M-D Module
Composition
TRX+
TRX+
TRX+
TRX-
TRX-
TRX-
24 V
24 V
24 V
Terminating
resisters
Before staring Installation Operation Specifications
GND
● 4 wire type communication and power source connection
Terminating
resisters
Master
TX+
TX-
RX+
RX-
(24 V DC)
24 V
GND
GND
※ Dotted line is connected
automatically during module
composition.
TRX+
TRX-
24 V
GND
※ Dotted line is connected
automatically during module
composition.
GND
M-D Module
Composition
TRX+
TRX-
24 V
GND
GND
TRX+
TRX-
24 V
GND
Terminating
resisters
9

2.4.2 RS232C communication
RS232C communication is used to control one Unit, and communicates only with Loader Jack.
For RS232C communication, despite Address setting switch, automatic setup is provided such as
communications Address "1", protocal "PC-LINK", communication speed "9,600bps",
start bit "1 bit", data length "8 bit", parity bit "even number”, stop bit "1 bit." Even with RS232C
communication, remote control and monitoring of connected unit is possible.
2.4.3 RS485 communication
Individual control is also possible using RS485 communication with unit address set as Unit
Address switch. Unit address setting is possible from No. 1 to No. 31. For setting below address
Multi Loop Controller
No. 15, unit address switch is set from No. 1 to No. 15 with unit address extension switch "+0"
and for setting address over No. 15, unit address switch No. 0 to No. 15 is set with unit extension
switch positioned at "+16". If unit extension switch is positioned at "+16" and unit address switch
at "1", RS485 communication address is set as "1+16=17".
RS232C
10
RS485
31 Units
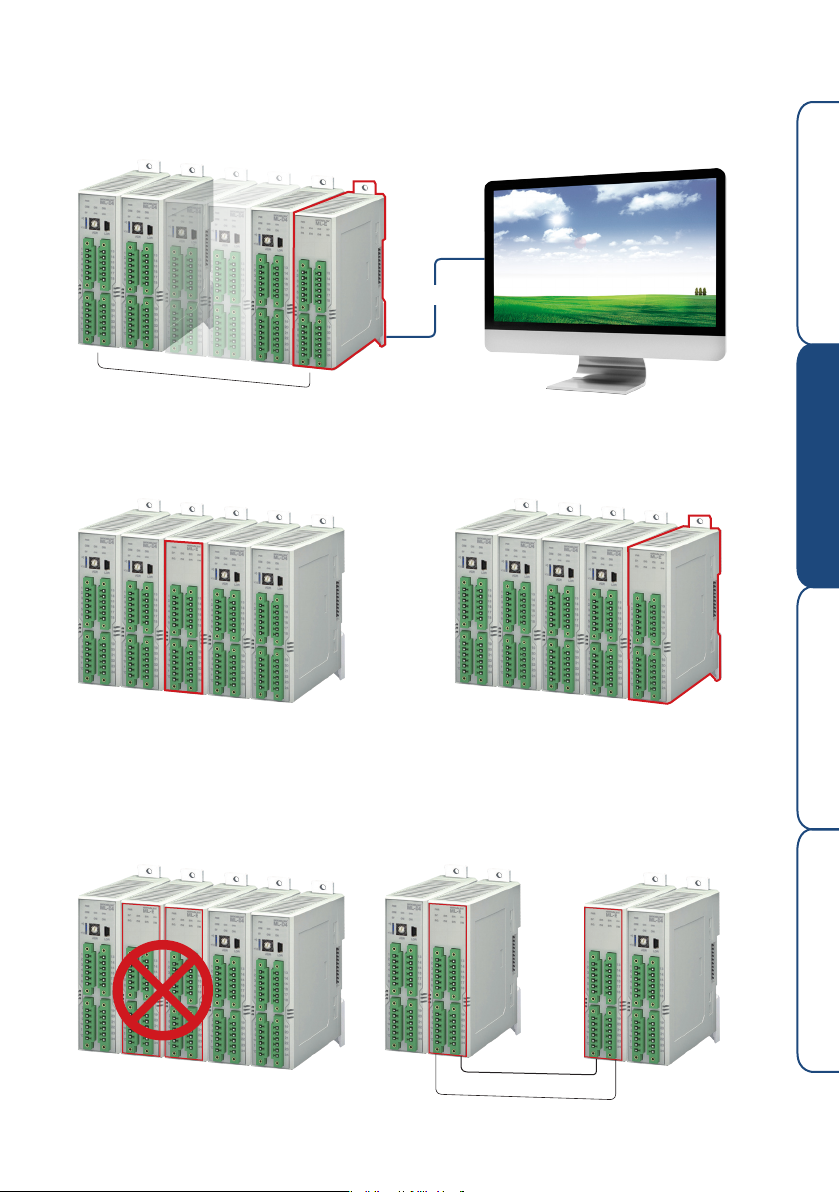
2.5 Event output unit (ML-E) connections
●
ML-E has no communications address, and sends output by receiving signal with side
connector during module composition.
RS485
Before staring Installation Operation Specifications
Mamimum 32 units
(Max. 31: if ML-E not included)
●
ML-E can be located and connected anywhere during module composition.
ML-E
●
When making up as one module, only 1 unit should be connected.
ML-E
ML-E
If several units of ML-E need to be used, it can be achieved by connecting power supply cable
and communication line with wiring method, instead of side connector.
ML-E
Power supply line
Communications cable
11
3. Run
3.1 Protocol composition
● Overview
- This product supports RS232C/485 communications, basic functions can be tested or operated
such as control, monitoring, and others using operating program provided in the computer.
- Protocols supported include PC-Link, PC-Link with SUM, Modbus, ASCII, Modbus RTU.
3.1.1 PC-LINK protocol
- Communication of product is performed with ASC II character string, defined Register can be read and written.
<Frame structure>
STX Address Command Data CR LF
STX 01 ~ 99 Refer to each Command 0x0D 0x0A
● Communications command
- This product uses following communication Command.
Command Detail
D R S D Register consecutive reading
D R R D Register random reading
D W S D Register consecutive writing
D W R D Register random writing
W H O Indication of own information
Multi Loop Controller
● Use of communication Command
⑴ DRS Command
- Use when reading value of consecutive D Register
- On frame, enter number of data to be read and D Register number
<Transmission frame>
Byte size
1 2 3 1 2 1 4 1 1
12
Description STX Address DRS
EA : 01~32
D Register : start D Register
<Reception frame>
Byte size
Description STX Address DRS
Data: Hexadecimal number Word data string
1 2 3 1 2 1 4 1 ... 1 4 1 1
,
OK
EA
,
Data(1)
,
D Register CR LF
,
...
,
Data(n) CR LF
,

⑵ DRR Command
- Use when reading random D Register value
- On frame, enter number of data to be read and D Register number on frame
<Transmission frame>
Byte size
1 2 3 1 2 1 4 1 ... 1 4 1 1
Before staring Installation Operation Specifications
Description STX Address DRR
EA : 01~32
EA
,
D Register(1)
,
D Register(n) CR LF
...
,
,
<Reception frame>
Byte size
Description ST X Address DRR
Data: Hexadecimal number Word data string
1 2 3 1 2 1 4 1 ... 1 4 1 1
EA
,
D Register(1)
,
D Register(n) CR LF
...
,
,
⑶ DWS Command
- Use when writing series of D Register values
- On frame, enter number of data to write, D Register number and each data
<Transmission frame>
Byte size
Description STX Address DWS,EA,D Register,Data(1)
EA: 01~15
D Register: start D Register
Data: Hexadecimal number data string
1 2 3 1 2 1 4 1 4 1 ... 1 4 1 1
Data(n) CR LF
...
,
,
<Reception frame>
Byte size
Description ST X Address DWS
1 2 3 1 2 1 1
,
OK CR LF
⑷ DWR Command
- Use when writing random D Register value
- On frame, enter number of data to write and D Register number and each data
<Transmission frame>
Byte size 1 2 3 1 2 1 4 1 4 1 ... 1 4 1 4 1 1
Description
EA: 01~15
Data: Hexadecimal number word data string
STX
Address
DWR,EA,D Register(1),Data(1)
<Reception frame>
Byte size
Description ST X Address DWR
1 2 3 1 2 1 1
D Register(n),Data(n)
...
,
,
,
OK CR LF
CR LF
13
⑸ WHO Command
- Can see product info. with WHO Command
<Transmission frame>
Byte size
Description STX Address WHO CR LFA
1 2 3 1 1
Reception frame
Byte size
1 2 3 1 2 1 - 1 1
Description STX Address WHO
- : Byte size changes depending on model name and version
⑹ Reply at error
- When receiving Command, this product transmits reception frame proper to corresponding frame
However, if there is an error in reception Command, following NG Frame is transmitted.
<Transmission frame>
Byte size
Description STX Address Command
- Details of NG Code are as follows
NG Code Name Details
Multi Loop Controller
1 2 3 1 2 2 1 1
0x01 Command Not used Command
0x02 Register Not used Register
0x03 Number
0x04 Data Data is out of Hex (0x0 ~ 0xF)
0x08 Delim Terminating string (CR, LF) error
0x10 SUM Inconsistent SUM value
0x18 Over range Value exceeding provided address scope
0x00 Misc Others
3.1.2 PC-LINK with SUM protocal
- Protocol that CHECK SUM is added to PC-LINK Protocol
<Frame structure>
STX Address Command Data SUM CR LF
STX 01 ~ 99 Refer to each Command
OK
,
,
Name & Version CR LF
,
NG NG Code CR LF
Number of communications and number of
Data do not match
Check
SUM
0x0D
0x0A
14
•
Check Sum is value generated by adding every 1 Byte of string ASCII code until SUM
• Convert generated value into 2 characters of Hexadecimal number
ex) STX 0 1 WH 0 4 F CR LF
Check Sum=4F, Check Sum = “0”(0x30) + “1”(0x31)+”W”(0x57+”H”(0x48)+”O”(0x4F)
=0x30 + 0x31 + 0x57 + 0x48 + 0x4F= 0x14F
As Check Sum is 1byte character, it becomes 0x4F, and then this changes to ASCII Code “4F.”
3.1.3 MODBUS-RTU Protocol
● Frame structure
Frame
heading
character
none 8 bit 8 bit n x 8 bit 16 bit None
CRC : Cyclic Redundancy Check
● Function code
Function code Code detail
03 Register multiple reading (n EA)
06 Register single writing (1 EA)
08 Diagnosis function (LOOP-BACK TEST)
16 Register multiple writing (n EA)
● Function code 03 (READ MULTIPLE REGISTERS)
With function code 03, consecutive register details can be read at once. Number of data to be read at
once varies depending on line condition and transmission speed within the frame. One transmission frame
should be less than 255 bytes.
<Transmission frame>
Serial number Details Size Ex.
0 Frame head character None 1 Device number 8 bit 01 h
2 Function code (03) 8 bit 03 h
3 Reading start register (high) 8 bit 75 h
4 Reading start register (low) 8 bit 36 h
5 Number of data to be read (high) 8 bit 00 h
6 Number of data to be read (low) 8 bit 05 h
7 Frame confirmation CRC (low) 8 bit XX h
8 Frame confirmation CRC (high) 8 bit XX h
9 Frame terminating character None -
Instrument
no.
Function
code
Data
Frame
confirmation CRC
Frame
terminating character
Before staring Installation Operation Specifications
<Reception frame>
Serial number Details Size Ex.
0 Frame head character None 1 Device number 8 bit 01 h
2 Function code (03) 8 bit 06 h
3 Number of data read and transmitted 8 bit dd h
4 Read data 1 (high) 8 bit dd h
5 Read data 1 (low) 8 bit dd h
... ... ... ...
n - 4 Read data n (high) 8 bit dd h
n – 3 Read data n (low) 8 bit dd h
n – 2 Frame confirmation CRC (low) 8 bit XX h
n – 1 Frame confirmation CRC (high) 8 bit XX h
n Frame terminating character None ...
15

● Function code 06 (WRITE SINGLE REGISTER)
With function code 06, details of one certain register can be recorded.
<Transmission frame>
Serial number Details Size Ex.
0 Frame head character None -
1 Device number 8 bit 01 h
2 Function code (06) 8 bit 06 h
3 Record start register (high) 8 bit 75 h
4 Record start register (low)
5 Recorded data (high) 8 bit 00 h
6 Recorded data (low) 8 bit 05 h
7 Frame confirmation CRC (low) 8 bit XX h
8 Frame confirmation CRC (high) 8 bit XX h
9 Frame terminating character None -
<Reception frame>
Serial number Details Size Ex.
0 Frame head character None -
1 Device number 8 bit 01 h
2 Function code (06) 8 bit 06 h
3 Record start register (high) 8 bit dd h
4 Record start register (low) 8 bit dd h
5 Recorded data (high) 8 bit dd h
6 Recorded data (low) 8 bit dd h
7 Frame confirmation CRC (low) 8 bit xx h
8 Frame confirmation CRC (high) 8 bit xx h
9 Frame terminating character None -
8 bit 36 h
Multi Loop Controller
● Function code 08 (LOOP-BACK TEST)
With function code 08, self diagnosis test can be performed.
<Transmission frame>
Serial number Details Size Ex.
0 Frame head character None -
1 Device number 8 bit 01 h
2 Function code (08) 8 bit 08 h
3 Diagnosis code (high) 8 bit 00 h
4 Diagnosis code (low) 8 bit 01 h
5 Transmission data (high) 8 bit 12 h
6 Transmission data (high) 8 bit 34 h
7 Frame confirmation CRC (low) 8 bit XX h
8 Frame confirmation CRC (high) 8 bit XX h
9 Frame terminating character None ...
16

<Reception frame>
Serial number Details Size Ex.
0 Frame head character None ...
1 Device number 8 bit 01 h
2 Function code (08) 8 bit 08 h
3 Diagnosis code (high) 8 bit 00 h
4
5
6 Transmission data (high) 8 bit 34 h
7 Frame confirmation CRC (low) 8 bit XX h
8 Frame confirmation CRC (high) 8 bit XX h
9 Frame terminating character None ...
Diagnosis code (low) 8 bit
Transmission data (high) 8 bit 12 h
01 h
● Function code 16 (WRITE MULTIPLE REGISTER)
With function code 16, consecutive register details can be written. Number of data to be written at a time
is depending on line condition and transmission speed within the frame. One transmission frame should be
less than 255 bytes.
<Transmission frame>
Serial number Details Size Ex.
0 Frame head character None ...
1 Device number 8 bit 01 h
2 Function code (16) 8 bit 10 h
3 Record start register (high) 8 bit 75 h
4 Record start register (low) 8 bit 36 h
5 Number of data to record (high) 8 bit 00 h
6 Number of data to record (high) 8 bit 05 h
7 Number of data to transmit (WORD) 8 bit 05 h
8 Data to record 1 (high) 8 bit dd h
9 Data to record 1 (low) 8 bit dd h
... ... ... ...
n - 4 Data to record n (high) 8 bit dd h
n – 3 Data to record n (low) 8 bit dd h
n – 2 Frame confirmation CRC (low) 8 bit XX h
n – 1 Frame confirmation CRC (high) 8 bit XX h
n Frame terminating character None ...
Before staring Installation Operation Specifications
<Reception frame>
Serial number Details Size Ex.
0 Frame head character None ...
1 Device number 8 bit 01 h
2 Function code (16) 8 bit 10 h
3 Record start register (high) 8 bit 75 h
4 Record start register (low) 8 bit 36 h
5 Number of data recorded (high) 8 bit 00 h
6 Number of data recorded (high) 8 bit 05 h
7 Frame confirmation CRC (low) 8 bit XX h
8 Frame confirmation CRC (high) 8 bit XX h
9 Frame terminating character None ...
17

3.2. Register composition
3.2.1 ML-D2H Register composition
No. 0 Description +100 +200 Description by channel
0 - - - - -
1 PV.1
2 PV.2 SV.1 SV.2 Set vlalue
3 - - MV.1 MV.2 Manipulated value
4 5
6 SV.1
7 SV.2 RJC.1 RJC.2
8 - TC.1 TC.2 sensor value
9 - INP.1 INP.2 Input type
10 - - CHMD.1 CHMD.2 Channel mode
11 MV.1 Manipulated
12 MV.2
13 - OUTS.1 OUTS.2 SSR/SCR output setting
14 15 - - - - 16 CHSTS.1
17 CHSTS.2 - - 18 - - - - 19 - - - - -
20 - - - - -
21 TSV.1
23 - - EV.1HY.1 EV.1HY.2
Multi Loop Controller
18
24 - - EV.2TY.1 EV.2TY.2
26 EVT_STS Event status EV.2HY.1 EV.2HY.2
27 EVBUS_STS Event output status EV.3TY.1 EV.3TY.2
29 - - EV.3HY.1 EV.3HY.2
30 - - EV.4TY.1 EV.4TY.2
31 LOCK Parameter setting lock EV.4VL.1 EV.4VL.2
32 COMCHK
33 PARA_SAVE
34 PARA_COPY Run parameter save EV.5VL.1 EV.5VL.2
35 - - EV.5HY.1 EV.5HY.2
36 CHMD.1
38 - - EV.6HY.1 EV.6HY.2
39 - - EV.7TY.1 EV.7TY.2
40 - - EV.7VL.1 EV.7VL.2
41 AT.1
42 AT.2 EV.8TY.1 EV.8TY.2
44 - - EV.8HY.1 EV.8HY.2
45 - - LBA.1 LBA.2 Loop break time setting
46 R/S RUN/STOP LBD.1 LBD.2 Loop break dead band setting
- - EVSTS.1 EVSTS.2 Event status
Process value
-
Set value
value
Channel status
Current trget set value
Time setting for RS485
communication
disconnection detection time
Save parameter
when communicating
Channel mode
Auto tuning
PV.1 PV.2 Process value
CHSTS.1 CHSTS.2
OUTSTS.1 OUTSTS.2 Heating control output status
AT.1 AT.2 Auto tuning
OUT.1
OUT_C_STS.1 OUT_C_STS.2
- - -
EV.1TY.1 EV.1TY.2
EV.4HY.1 EV.4HY.2
EV.5TY.1 EV.5TY.2
EV.6TY.1 EV.6TY.2
EV.7HY.1 EV.7HY.2
OUT.2 Output type
Channel status
Reference junction
compensation
Cooling control output status
Event channel 1 setting22 TSV.2 EV.1VL.1 EV.1VL.2
Event channel 2 setting25 - - EV.2VL.1 EV.2VL.2
Event channel 3 setting28 - - EV.3VL.1 EV.3VL.2
Event channel 4 setting
Event channel 5 setting
Event channel 6 setting37 CHMD.2 EV.6VL.1 EV.6VL.2
Event channel 7 setting
Event channel 8 setting43 - - EV.8VL.1 EV.8VL.2

No. 0 Description +100 +200 Description by channel
47 R/S_SAVE
48 PARA_INIT Parameter initialization HBC.1 HBC.2 Heater break current value
49 - - HBA.1 HBA.2 Heater break event current value
50 - - HB_HYS.1 HB_HYS.2 Heater break hysteresis
51
52
53 - - TD.1 TD.2
54 - - AP.1 AP.2
55 - - MR.1 MR.2 Manual reset
56 - - CT.1 CT.2 Heating control cycle
57 - - PO.1 PO.2 Heating control emergency output
58 - - HYS.1 HYS.2
59 - - RO.1 RO.2 Heating control stop / output when monitor
60 - - RUP.1 RUP.2 SV increase temperature
61 EVSTS.1
62 EVSTS.2 RMIN.1 RMIN.2 SV change time (minute)
63 - - RHRS.1 RHRS.2 SV change time (hour)
64 - DR.1 DR.2 Control output
65 - - OHL.1 OHL.2 Output high limit
66 EV.1STS
67 EV.2STS AT_HYS.1 AT_HYS.2 Auto tuning hysteresis
68 EV.3STS - - 69 EV.4STS - - 70 EV.5STS - - -
71 EV.6STS BS.1 BS.2 Input compensation
72 EV.7STS FL.1 FL.2 Input filter
73 EV.8STS SVH.1 SVH.2 SV High setting
74 - - SVL.1 SVL.2 SV low setting
75 - - FRH.1 FRH.2 Input high limit
76 EVBUS.1
77 EVBUS.2 SLH.1 SLH.2 High scale limit
78 EVBUS.3 SLL.1 SLL.2 Low scale limit
79 EVBUS.4 DOT.1 DOT.2 Set decimal point
80 EVBUS.5 - - -
81 EVBUS.6 PBC.1 PBC.2 Cooling control proportion value
82 EVBUS.7 TIC.1 TIC.2 Cooling control differential value
83 EVBUS.8 TDC.1 TDC.2 Cooling control differential value
84 - - CTC.1 CTC.2 Cooling control control cycle
85 - - POC.1 POC.2
86 PRS Communication protocol HYSC.1 HYSC.2 ON/OFF cooling control hysteresis
87 BPS Transmission speed ROC.1 ROC.2
88 PRI Parity bit 89 STP Stop bit 90 DLN Data length - - -
91 RPT Delay time HC.1 HC.2
92 - - HC_DB.1 HC_DB.2 Heating/cooling control deadband
93 - - 94 - - - - 95 ADDR Switch address - - 96 MAX_CH Number of channels - - 97 R_SYS System data - - 98 R_OPT Option date - - 99 ROMVER Version - -
Power outage recovery setting
- -
- - TI.1 TI.2
Event status by channel
Channel status by event
Event bus output setting
EVSTOP.1 EVSTOP.2 Stop Running at event occurrence
PB.1
RDN.1 RDN.2 SV decrease temperature
OLL.1 OLL.2 Auto tuning hysteresis
FRL.1 FRL.2 Input low limit
PB.2
Heating control Proportion control value
Heating control Integral control value
Heating control Differential control value
Cooling control stop. Output at monitoring situation
Heating, heating/cooling control setting
ALPH value
ON/OFF heating control hysteresis
Cooling control output at
emergency situation
-
Before staring Installation Operation Specifications
19

3.2.2 ML-D2H register description
Register range Details
4 0001(0) ~ 4 0099(63) CH1~2 PV, SV, MV, TSV, CHSTS, EVSTS and common channel setting ※ Please use address
4 0101(65) ~ 4 0199(C7) CH1 related setting
4 0201(C9) ~ 4 0299(12B) CH2 related setting
40000 for Modbus
communication
Register address
(HEX)
CH1 CH2
1(1) 2(2) PV Process value R EU(0 ~ 100%) ℃ -
6(6) 7(7) SV Set value R/W EU (0 ~ 100%) ℃ EU (0%)
11(B) 12(C) MV Manipulated Value R 0.0 ~ 100.0 % -
16(10) 17(11) CHSTS Channel status R
21(15) 22(16) TSV Target set value R EU (0 ~ 100%) ℃ EU (0%)
26(1A) EVT_STS Event status R
Symbol
n : Number
of channel
Multi Loop Controller
27(1B)
31(1F) LOCK
32(20)
33(21)
34(22)
36(24) 37(25)
41(29)
46(2E) R/S Run setting R/W
EVBUS_STS
COMCHK
PARA_SAVE
PARA_COPY
CHMD.n Set channel mode R/W
42(2A)
AT.n
20
Description
Event Bus output
status
Parameter change
lock
Time setting for
RS485 communication
disconnection detection
time
Setting of communication
used parameter save
Run parameter save R/W
Run PID auto tuning (AT)
Property
(R/W)
R/W
R/W
R/W
R/W
Setting range Unit
OR run for situation occurrence
15 Bit: Set “1” at System Data error
14 Bit: Set “1” at Calibration Data error
13 Bit: Set “1” at input circuit error
12 Bit: Set “1” at EEPROM error
11 Bit: Set “1” after 24 hours of auto toning (AT)
10 Bit: Set “1” at standard contact point correction
(RCJ) error
9 Bit: Set “1” when exceeding ±5% input range
8 Bit: Set “1” at input sensor error (B. OUT)
2 Bit: Set “1” at auto tuning (AT) running
1 Bit: Set “1” at monitor mode
0 Bit: Set “1” at run start
Indication of occurrence to all events previously set
0: no event occurred
1: event occurred
Event bus output OR run
7 Bit(128): Set “1” at event bus8 output occurrence
6 Bit(64): Set “1” at event bus 7 output occurrence
5 Bit(32): Set “1” at event bus 6 output occurrence
R
4 Bit(16): Set “1” at event bus 5 output occurrence
3 Bit(8): Set “1” at event bus 4 output occurrence
2 Bit(4): Set “1” at event bus 3 output occurrence
1 Bit(2): Set “1” at event bus 2 output occurrence
0 Bit(1): Set “1” at event bus 1 output occurrence
0: possible to edit all parameters
1: possible to edit only SV, R/S, AT, CHEN
parameters
2. impossible to edit all parameters
0 : OFF
1 ~ 3,600
0: Automatic parameter save
1: save manually using PARA_COPY
parameter
1: When PARA_SAVE “1” is set, save
parameters manually
0:Stop mode
1: Monitor mode
2: Run mode
0: PID auto tuning (AT) stop
1: PID auto tuning (AT) start
0: run stop (STOP)
1: run start (RUN)
Initial
value
ABS -
ABS -
ABS -
ABS 0
sec.
0 (OFF)
ABS 0
ABS 0
ABS 0
ABS 0
ABS 0

Register
address (HEX)
CH1 CH2
47(2F)
48(30)
61(3D) 62(3E)
66(42)
67(43) EV.2STS
68(44) EV.3STS
69(45) EV.4STS
70(46) EV.5STS
71(47) EV.6STS
72(48) EV.7STS
73(49) EV.8STS
76(4C) EVBUS.1
77(4D) EVBUS.2
78(4E) EVBUS.3
79(4F) EVBUS.4
80(50) EVBUS.5
81(51) EVBUS.6
82(52) EVBUS.7
83(53) EVBUS.8
Symbol
n : Number
of channel
R/S_SAVE
PARA_INIT
EVSTS
EV.1STS
Description
Power outage recovery
setting
Run parameter initialization
Event channel by
channel, 1~8 status
Event channel 1, channel
1~4 status
Event channel 2, channel
1~4 status
Event channel 3, channel
1~4 status
Event channel 4, channel
1~4 status
Event channel 5, channel
1~4 status
Event channel 6, channel
1~4 status
Event channel 7, channel
1~4 status
Event channel 8, channel
1~4 status
Event bus 1 output setting
Event bus 2 output setting
Event bus 3 output setting
Event bus 4 output setting
Event bus 5 output setting
Event bus 6 output setting
Event bus 7 output setting
Event bus 8 output setting
Property
(R/W)
R/W
0: NO run return
1: run return
Setting range Unit
ABS 1
R/W 1: Parameter initialization ABS 0
All events OR running
7 Bit(128): Set “1” at event channel 8 occurrence
6 Bit(64): Set “1” at event channel 7 occurrence
5 Bit(32): Set “1” at event channel 6 occurrence
R
4 Bit(16): Set “1” at event channel 5 occurrence
3 Bit(8): Set “1” at event channel 4 occurrence
2 Bit(4): Set “1” at event channel 3 occurrence
1 Bit(2): Set “1” at event channel 2 occurrence
0 Bit(1): Set “1” at event channel 1 occurrence
ABS -
R
R
R
All events OR run
R
1 Bit(2): Set “1” at CH2 event occurrence
0 Bit(1): Set “1” at CH1 event occurrence
R
ABS -
R
R
R
R/W
R/W
R/W
Set corresponding event bus output option at
R/W
event occurrence
0: output (OFF)
R/W
1: output (ON)
R/W
ABS 0
R/W
R/W
0 : PC-LINK
86(56) PRS Communication protocol R/W
1 : PC-LINK with SUM
2 : Modbus ASCII
ABS0
3 : Modbus RTU
0 : 9600 bps
1 : 19200 bps
87(57) BPS Transmission speed R/W
2 : 38400 bps
ABS0(9600
3 : 57600 bps
4 : 76800 bps
0 : NONE
88(58) PRI Parity bit R/W
1 : ODD
ABS
2 : EVEN
89(59) STP Stop bit R/W
90(5A) DLN Data length R/W
91(5B) RPT
95(5F) ADDR
Communication response
delay
Communication setup
Address
1 : 1 Bit
2 : 2 Bit
7 : 7 Bit
8 : 8 Bit
0~10 delay time= process time
R/W
(maximum 25ms) +RTP X 10ms
ABS 1 (1 Bit)
ABS 8 (8 Bit)
ABS 0
R 1 ~ 32 ABS -
96(60) MAX_CH Number of channels R 2 : 2 Channel ABS -
Initial
value
(PC-
LINK)
bps)
2
(EVEN)
Before staring Installation Operation Specifications
21

Register address
(HEX)
CH1 CH2
97(61) R_SYS System data R - ABS -
98(62) R_OPT Option data R - ABS -
99(63) ROMVER Firmware version R - ABS -
101(65) 201(C9)
102(66)
202(CA)
203(CB)
103(67)
104
(68)
105
(69)
106
(6A)
107
Multi Loop Controller
(6B)
108
(6C)
109
(6D)
110
(6E)
Symbol
n : Number of
channel
PV Process value R EU (0 ~ 100%) ℃ -
SV Set vlalue R/W EU (0 ~ 100%) ℃ EU (0%)
MV
204
CHSTS Channel R
(CC)
205
EVSTS
(CD)
206
OUTSTS Output status R
(CE)
207
(CF)
208
(D0)
209
(D1)
210
(D2)
RJC
TC
INP Set input type R/W
CHMD
Description
Manipulated
Value
Event channel
by channel 1~8
status
RJC temperature
value
Thermo couple
(TC) value
Set channel
mode
Property
(R/W)
R 0.0 ~ 100.0
All error status OR run
15 Bit: Set “1” at System Data error
14 Bit: Set “1” at Calibration Data error
13 Bit: Set “1” at input circuit error
12 Bit: Set “1” at EEPROM error
11 Bit: Set “1” after 24 hours of auto toning (AT)
10 Bit: Set “1” at RJC
9 Bit: Set “1” when exceeding ±5% input range
8 Bit: Set “1” at input sensor error (B. OUT)
2 Bit: Set “1” at auto tuning (AT) run
1 Bit: Set “1” at monitor mode
0 Bit: Set “1” at run start
All events OR run
7 Bit(128): Set “1” at event channel 8 occurrence
6 Bit(64): Set “1” at event channel 7 occurrence
5 Bit(32): Set “1” at event channel 6 occurrence
R
4 Bit(16): Set “1” at event channel 5 occurrence
3 Bit(8): Set “1” at event channel 4 occurrence
2 Bit(4): Set “1” at event channel 3 occurrence
1 Bit(2): Set “1” at event channel 2 occurrence
0 Bit(1): Set “1” at event channel 1 occurrence
0: output (OFF)
1: output (ON)
R EU (0 ~ 100%) ℃ -
R EU (0 ~ 100%) ℃ -
0~18: Thermo Couple (TC)
20~23: Resistance Temperature Detector (RTD)
30~ 32: Direct Current Voltage (DCV)
* Refer to input type
0: Stop mode
R/W
1: Monitor mode
2: Run mode
Setting range Unit
%
ABS -
ABS -
ABS -
ABS
ABS 0
Initial
value
-
1
(Thermo
couple
K Type)
22
111
(6F)
112
(70)
113
(71)
114
(72)
211
(D3)
212
(D4)
213
(D5)
214
(D6)
AT
OUT Output type R
OUTS
OUT_C_STS
Run PID auto
tuning(AT)
SSR/SCR
output setting
Cooling control
output status
0: PID auto tuning (AT) stop
R/W
1: PID auto tuning (AT) start
0 : OUT1 - RELAY, OUT2 - RELAY
1 : OUT1 - SSR/SCR, OUT2 - RELAY
2 : OUT1 - SSR/SCR, OUT2 - SSR/SCR
'0' setting for SSR, '1' setting for SCR
R/W
1 Bit(2): SSR/SCR output setting for OUT2
0 Bit(1): SSR/SCR output setting for OUT1
Output OFF
R
Output ON
ABS 0
Follow
ABS
product
specs
ABS
ABS
0
-

Register
address
(HEX)
CH1 CH2
121
(79)
(DD)
122
(7A)
(DE)
123(7B)
223(DF)
124(7C)
224(E0)
~
144(90)
244(F4)
145
(F5)
(91)
146
(92)
147
(93)
(F7)
148
248
(94)
(F8)
149
249
(95)
(F9)
150
250
(96)
(FA)
151
(97)
(FB)
152
(98)
(FC)
153
253
(99)
(FD)
154
254
(9A)
(FE)
155
255
(9B)
(FF)
156
256
(9C)
(100)
157
(9D)
(101)
158
258
(9E)
(102)
159
259
(9F)
(103)
160
260
(A0)
(104)
161
(A1)
(105)
162
262
(A2)
(106)
Symbol
n : Number of
channel
221
EV.1TY
222
EV.1VL
EV.1HY
EV.2
~
~
EV.8
245
LBA
246
LBD
(F6)
247
EVSTOP
HBC
HBA
HB_HYS
251
PB Set proportional band R/W EUS (0 ~ 100%) ℃
252
257
261
TI Set integral time R/W 1 ~ 3600 Sec. 240
TD Set differentiation time R/W 1 ~ 3600 Sec. 60
AR/AP
MR Set Manual Reset R/W 0.0 ~ 100.0 % 0.0
CT Set control cycle R/W 1 ~ 100 Sec.
PO Set emergency output R/W 0.0 ~ 100.0 % 0
HYS
RO
RUP
RDN
RMIN
Description
Set event channel 1
type
Event set value of event
channel 1
Event channel 1, event hysteresis
Set event channel
2~8 event type, set
value and hysteresis
Set loop break
event time
Set loop break event
dead band
Set stop run at event
occurrence
Heater break
current value
Heater break current
value setting
Heater break
hysteresis setting
Heating control: Set 2
DOF PID ALPHA
Heating/Cooing
control: Anti reset
windup (ARW) setting
Set hysteresis at
ON/OFF control
Set output at stop,
monitor status
Set SV increase
temperature at RAMP
control
Set SV decrease
temperature at RAMP
control
Set SV change time
(min.) at RAMP control
Property
(R/W)
None(OFF)
1:Deviation high limit
2: Deviation low limit
3. Deviation high/low limit
4: Within deviation scope
R/W
5: Deviation high limit (stand by)
6: Deviation low limit (stand by)
7. Deviation low/high limit (stand by)
8. Within deviation (stand by)
9:PV high limit
R/W EUS (0 ~ 100%) EU (0 ~ 100%) ℃ -
R/W EUS (0 ~ 10%) ℃ -
R/W Same as event channel 1
R/W 0(OFF), 1~7200 Sec. 0(OFF)
R/W EUS (0 ~ 100%) ℃
0: continuous run
R/W
1: stop run
R 1~50A A -
R/W 0(OFF), 1.0~50.0A A 0(OFF)
R/W 0.0~50.0 A 0.3
Heating control: 1~100
R/W
Heating/Cooing control: 0(AUTO), 50.0~200.0
R/W EUS (0 ~ 10%) ℃
R/W 0.0 ~ 100.0 % 0
R/W EUS (0 ~ 100%) ℃
R/W EUS (0 ~ 100%) ℃
R/W 0 ~ 1000 Min. 0
Setting range Unit
10: PV low limit
11: PV high limit (stand by)
12:PV low limit (stand by)
13: SV high limit
14: SV low limit
15: Loop break (LBA)
16: 17: Run start (RUN)
18: Run/monitor mode
(READY)
19: FAIL
Initial
value
ABS 0(OFF)
EUS
(100%)
0
(continuous
ABS
run)
EUS
(1%)
ABS 0
RELAY :
30 sec.
SSR
: 2 sec.
EUS
(0.2%)
EUS
(0%)
EUS
(0%)
Before staring Installation Operation Specifications
23

Register
address (HEX)
CH1 CH2
163
(A3)
164
(A4)
165
(A5)
166
(A6)
171
(AB)
172
(AC)
173
(AD)
174
(AE)
175
(AF)
176
(B0)
177
(B1)
178
(B2)
179
(B3)
181
Multi Loop Controller
(B5)
182
(B6)
183
(B7)
184
(B8)
185
(B9)
186
(BA)
187
(BB)
191
(BF)
192
(C0)
Symbol
n : Number
of channel
263
RHRS
(107)
264
(108)
265
(109)
266
(10A)
(10F)
272
(110)
273
(111)
(112)
275
(113)
276
(114)
277
(115)
278
(116)
279
(117)
(119)
282
(1A0)
283
(1A1)
284
(1A2)
285
(1A3)
286
(1A4)
287
(1A5)
(1A9)
292
(1AA)
DR Set control run R/W
OHL
OLL
271
BS Set input correction R/W EUS (-100 ~ 100%) ℃ EUS (0%)
FL Set input filter R/W 0 ~ 100 ABS 0
SVH Set SV high limit R/W EU (0 ~ 100%) ℃ EU (100%)
274
SVL Set SV low limit R/W EU (0 ~ 100%) ℃ EU (0%)
FRH Set PV high limit R/W EU (0 ~ 100%) ℃ EU (100%)
FRL Set PV low limit R/W EU (0 ~ 100%) ℃ EU (0%)
SLH
SLL
DOT Set decimal point R/W 0 ~ 3 :
281
PBC
TIC
TDC
CTC
POC
HYSC
ROC
291
HC
HC_DB
Description
Set SV change time
(hr.) at RAMP control
Set high limit to
Manipulated Value
Set low limit to
Manipulated Value
Set scale high limit
at DCV input setting
Set scale low limit
at DCV input setting
Cooling control
Proportional band
setting
Cooling control integral
time setting
Cooling control
derivative time setting
Cooling control control
period setting
Cooling control
Emergency output
setting
Cooling control
ON / OFF control
Hysteresis setting
Stop cooling control.
Output setting at monitor
status
Heating, heating /
cooling control settings
Heating / cooling control
dead band setting
Property
(R/W)
R/W 0 ~ 100 hour 0
R/W 0.0 ~ 100.0 % 100.0
R/W 0.0 ~ 100.0 % 0.0
R/W EU (0 ~ 100%) mV EU (100%)
R/W EU (0 ~ 100%) mV EU (0%)
R/W EUS (0 ~ 100%) ℃ EUS (2%)
R/W 1 ~ 3600 Second 240
R/W 1 ~ 3600 Second 60
R/W 1 ~ 100 Second
R/W 0.0 ~ 100.0 % 0
R/W EUS (0 ~ 10%) ℃ EUS (0.2%)
R/W 0.0 ~ 100.0 % 0
R/W
R/W -100 ~ 50 % 0
Setting range Unit Initial value
0: Reverse run (heating)
control
1: Direct run (cooling)
control
decimal point digit
0 : heating control
1 : heating/cooling control
ABS 0
ABS 0
ABS
RELAY :
30 Sec.
S.S.R :
2 Sec.
0 (heating
control)
24

3.2.3 ML-D4 Register composition
No. 0
0 - - - - - - -
1 PV.1
2 PV.2 SV.1 SV.2 SV.3 SV.4 Set value
3 PV.3 MV.1 MV.2 MV.3 MV.4 Manipulated Value
4 PV.4
5 - - EVSTS.1 EVSTS.2 EVSTS.3 EVSTS.4 Event status
6 SV.1
7 SV.2 RJC.1 RJC.2 RJC.3 RJC.4 Temperature
8 SV.3 TC.1 TC.2 TC.3 TC.4 Sensor value
9 SV.4 INP.1 INP.2 INP.3 INP.4 Input type
10 - - CHMD.1 CHMD.2 CHMD.3 CHMD.4 Channel mode
MV.1
11
12 MV.2 OUT.1 OUT.2 OUT.3 OUT.4 Output type
13 MV.3 EV.1DLY.1 EV.1DLY.2 EV.1DLY.3 EV.1DLY.4
14 MV.4
15 - 16 CHSTS.1
17 CHSTS.2
18 CHSTS.3
19 CHSTS.4
20 - -
21 TSV.1
23 TSV.3 EV.1HY.1 EV.1HY.2 EV.1HY.3 EV.1HY.4
24 TSV.4 EV.2TY.1 EV.2TY.2 EV.2TY.3 EV.2TY.4
26 EVT_STS Event status EV.2HY.1 EV.2HY.2 EV.2HY.3 EV.2HY.4
27 EVBUS_STS Event output status EV.3TY1 EV.3TY2 EV.3TY3 EV.3TY4
29 - - EV.3HY.1 EV.3HY.2 EV.3HY.3 EV.3HY.4
30 - - EV.4TY.1 EV.4TY.2 EV.4TY.3 EV.4TY.4
31 LOCK Parameter setting lock EV.4VL.1 EV.4VL.2 EV.4VL.3 EV.4VL.4
32 COMCHK
33 PARA_SAVE
PARA_
34
COPY
35 - - EV.5HY.1 EV.5HY.2 EV.5HY.3 EV.5HY.4
36 CHMD.1
38 CHMD.3 EV.6HY.1 EV.6HY.2 EV.6HY.3 EV.6HY.4
39 CHMD.4 EV.7TY.1 EV.7TY.2 EV.7TY.3 EV.7TY.4
40 - - EV.7VL.1 EV.7VL.2 EV.7VL.3 EV.7VL.4
41 AT.1 Auto tuning EV.7HY.1 EV.7HY.2 EV.7HY.3 EV.7HY.4
42 AT.2
44 AT.4 EV.8HY.1 EV.8HY.2 EV.8HY.3 EV.8HY.4
Description
Process value
Set value
Manipulated Value
Channel status
Current target
set value
Time setting for RS485
communication
disconnection detection
time
Save parameter
when communicating
Run parameter save EV.5VL.1 EV.5VL.2 EV.5VL.3 EV.5VL.4
Channel mode
Auto tuning
+100 +200 +300 +400
PV.1 PV.2 PV.3 PV.4
CHSTS.1
OUTSTS.1 OUTSTS.2
EV.2DLY.1 EV.2DLY.2 EV.2DLY.3 EV.2DLY.4
EV.3DLY.1 EV.3DLY.2 EV.3DLY.3 EV.3DLY.4
EV.4DLY.1 EV.4DLY.2 EV.4DLY.3 EV.4DLY.4
EV.5DLY.1 EV.5DLY.2 EV.5DLY.3 EV.5DLY.4
EV.6DLY.1 EV.6DLY.2 EV.6DLY.3 EV.6DLY.4
EV.7DLY.1 EV.7DLY.2 EV.7DLY.3 EV.7DLY.4
EV.8DLY.1 EV.8DLY.2 EV.8DLY.3 EV.8DLY.4
EV.1TY.1 EV.1TY.2 EV.1TY.3 EV.1TY.4
EV.4HY.1 EV.4HY.2 EV.4HY.3 EV.4HY.4
EV.5TY.1 EV.5TY.2 EV.5TY.3 EV.5TY.4
EV.6TY.1 EV.6TY.2 EV.6TY.3 EV.6TY.4
EV.8TY.1 EV.8TY.2 EV.8TY.3 EV.8TY.4
CHSTS.2 CHSTS.3
OUTSTS.3 OUTSTS.4
AT.1 AT.2 AT.3 AT.4 Auto tuning
CHSTS.4
Description by channel
Process value
Channel status
control output status
Event 1 delay setting
Event 2 delay setting
Event 3 delay setting
Event 4 delay setting
Event 5 delay setting
Event 6 delay setting
Event 7 delay setting
Event 8 delay setting
Event 1 setting22 TSV.2 EV.1VL.1 EV.1VL.2 EV.1VL.3 EV.1VL.4
Event 2 setting25 - - EV.2VL.1 EV.2VL.2 EV.2VL.3 EV.2VL.4
Event 3 setting28 - - EV.3VL.1 EV.3VL.2 EV.3VL.3 EV.3VL.4
Event 4 setting
Event 5 setting
Event 6 setting37 CHMD.2 EV.6VL.1 EV.6VL.2 EV.6VL.3 EV.6VL.4
Event 7 setting
Event 8 setting43 AT.3 EV.8VL.1 EV.8VL.2 EV.8VL.3 EV.8VL.4
Before staring Installation Operation Specifications
25

No. 0
45 - - LBA.1 LBA.2 LBA.3 LBA.4
46 R/S RUN/STOP LBD.1 LBD.2 LBD.3 LBD.4
47 R/S_SAVE
48 PARA_INIT
49 -
50 - - - - - - -
51 - - PB.1 PB.2 PB.3 PB.4
52 - - TI.1 TI.2 TI.3 TI.4 Integral control value
53 - - TD.1 TD.2 TD.3 TD.4
54 - - AP.1 AP.2 AP.3 AP.4 ALPHA value
- - MR.1 MR.2 MR.3 MR.4
55
56 - 57 - 58 - 59 - -
60 - -
61 EVSTS.1
62 EVSTS.2
63 EVSTS.3 RHRS.1 RHRS.2 RHRS.3 RHRS.4
64 EVSTS.4 DR.1 DR.2 DR.3 DR.4 Control run
65 - - OHL.1 OHL.2 OHL.3 OHL.4
66 EV.1STS
67 EV.2STS - - - - 68 EV.3STS - - - - 69 EV.4STS - - - - 70 EV.5STS - - - - 71 EV.6STS BS.1 BS.2 BS.3 BS.4 Input compensation
Multi Loop Controller
26
72 EV.7STS FL.1 FL.2 FL.3 FL.4 Input filter
73 EV.8STS SVH.1 SVH.2 SVH.3 SVH.4 High limit to setting
74 - - SVL.1 SVL.2 SVL.3 SVL.4 Low limit to setting
75 - - FRH.1 FRH.2 FRH.3 FRH.4 High limit to input
76 EVBUS.1
77 EVBUS.2 SLH.1 SLH.2 SLH.3 SLH.4 High limit to scale
78 EVBUS.3 SLL.1 SLL.2 SLL.3 SLL.4 Low limit to scale
79 EVBUS.4 DOT.1
80 EVBUS.5 - -
81 EVBUS.6 - 82 EVBUS.7 - - - - 83 EVBUS.8 - - - - -
84 - - - - - - -
85 - - - 86 PRS
87 BPS Transmission speed - -
88 PRI Parity bit - -
89 STP Stop bit - -
90 DLN Data length
91 RPT Delay time
92 - 93 - 93 - 94 - -
Channel status by
Communication protocol
Description
Power outage
recovery setting
Parameter
initialization
-
Event status by
channel
event
Event bus output
+100 +200 +300 +400
EVSTOP.1
HYS.1 HYS.2 HYS.3 HYS.4 hysteresis
RUP.1 RUP.2 RUP.3 RUP.4
RDN.1 RDN.2 RDN.3 RDN.4
RMIN.1 RMIN.2 RMIN.3 RMIN.4
OLL.1 OLL.2 OLL.3 OLL.4
FRL.1 FRL.2 FRL.3 FRL.4 Low limit to input
EVSTOP.2 EVSTOP.3 EVSTOP.4
- -
- -
CT.1 CT.2 CT.3 CT.4
PO.1 PO.2 PO.3 PO.4 emergency output
RO.1 RO.2 RO.3 RO.4
DOT.2 DOT.3 DOT.4
- -
- - - -
- - - -
- - - -
- - - -
- - - -
- - - -
- -
-
- -
- -
- -
- -
- -
- -
- -
Description by channel
Loop break event time
Loop break event dead band
Stop running at event
occurrence
- -
Proportion control value
Differential control value
Manual reset
control cycle
Output at stop/monitor mode
SV increasing temperature
SV decreasing temperature
SV increase and decrease
time (minute)
SV increase and
decrease time (hour)
Manipulated Value high limit
Manipulated Value low limit
Decimal point
-
-
-
-
-
-
-
-
-
-
-
-
-
-

No.
0
93 - 94 - 95 ADDR Switch address - - - - 96 MAX_CH Number of channels - - - - 97 R_SYS System data - - - - -
R_OPT Option data - - - - -
98
99 ROMVER Version - - - - -
Description
+100 +200 +300 +400
- - - -
- - - -
Description by channel
3.2.4 ML-D4register description
Register address (HEX) Description
40001(0) ~ 4 0099(63)
40101(65) ~ 40199(C7) CH1 related setting
40201(C9) ~ 40299(12B) CH2 related setting
40301(12D) ~ 40399(18F) CH3 related setting
40401(191) ~ 40499(1F3) CH4 related setting
Register address (HEX) Symbol
CH1 CH2 CH3 CH4
1(1) 2(2) 3(3) 4(4) PV
6(6) 7(7) 8(8) 9(9) SV
11(B) 12(C) 13(D) 14(E) MV
16(10) 17(11) 18(12) 19(13) CHSTS
21(15) 22(16) 23(17) 24(18) TSV
26(1A) EVT_STS
27(1B)
31(1F) LOCK
32(20)
33(21)
CH1~4 PV, SV, MV, TSV, CHSTS, EVSTS and common channel setting
n : Number
of channel
EVBUS_STS
COMCHK
PARA_SAVE
Description
Process value
Set value
Manipulated
Value
Channel
status
Current target
set value
Event status
Event bus output
status
Parameter
setting lock
Time setting for
RS485
communication
disconnection
detection time
Save parameter
when
communication
Property
(R/W)
R EU(0 ~ 100%) ℃ -
R/W EU (0 ~ 100%) ℃ EU (0%)
R 0.0 ~ 100.0 % -
OR run for situation occurrence
15 Bit: Set “1” at System Data error
14 Bit: Set “1” at Calibration Data error
13 Bit: Set “1” at input circuit error
12 Bit: Set “1” at EEPROM error
11 Bit: Set “1” after 24 hours of auto toning (AT)
R
10 Bit: Set “1” at standard contact point
correction (RCJ) error
9 Bit: Set “1” when exceeding ±5% input range
8 Bit: Set “1” at input sensor error (B. OUT)
2 Bit: Set “1” at auto tuning (AT) run
1 Bit: Set “1” at monitor mode
0 Bit: Set “1” at run start
R EU (0 ~ 100%) ℃ EU (0%)
Indication of occurrence to all events
previously set
R
0: no event occurred
1: event occurred
Event bus output OR run
7 Bit(128): Set “1” at event bus8 output occurrence
6 Bit(64): Set “1” at event bus7 output occurrence
5 Bit(32): Set “1” at event bus6 output occurrence
R
4 Bit(16): Set “1” at event bus5 output occurrence
3 Bit(8): Set “1” at event bus4 output occurrence
2 Bit(4): Set “1” at event bus3 output occurrence
1 Bit(2): Set “1” at event bus2 output occurrence
0 Bit(1): Set “1” at event bus1 output occurrence
0: possible to edit all parameters
1: possible to edit only SV, R/S, AT, CHEN
R/W
parameters
2. impossible to edit all parameters
0: OFF
R/W
1 ~ 3,600
0: Automatic parameter save
R/W
1: save manually using PARA_COPY
parameter
Setting range Unit
※ Please use address
40000 for Modbus
communication
-
-
ABS -
ABS -
ABS -
ABS 0
second
0 (OFF)
ABS 0
Initial
value
Before staring Installation Operation Specifications
27

Register address (HEX) Symbol
CH1 CH2 CH3 CH4
34(22)
36(24) 37(25) 38(26) 39(27)
41(29)
42(2A)
43(2B)
44(2C)
46(2E) R/S Run setting R/W
47(2F)
48(30)
61
(3D)62(3E)63(3F)64(40)
66(42)
67(43)
68(44)
69(45)
Multi Loop Controller
70(46)
71(47)
72(48)
73(49) EV.8STS
76(4C) EVBUS.1
77(4D) EVBUS.2
78(4E) EVBUS.3
79(4F) EVBUS.4
80(50) EVBUS.5
81(51) EVBUS.6
82(52) EVBUS.7
83(53) EVBUS.8
n : Number
of channel
PARA_COPY
Description
Run parameter
save
Property
CHMD.n Set channel mode R/W
AT.n
R/S_
SAV E
PARA_
INIT
Run PID auto
tuning (AT)
Set power outage
return
Run parameter
initialization
Event channel
EVSTS
by channel, 1~8
status
EV.1STS
EV.2STS
EV.3STS
EV.4STS
EV.5STS
EV.6STS
EV.7STS
Event channel 1,
channel 1~4 status
Event channel 2,
channel 1~4 status
Event channel 3,
channel 1~4 status
Event channel 4,
channel 1~4 status
Event channel 5,
channel 1~4 status
Event channel 6,
channel 1~4 status
Event channel 7,
channel 1~4 status
Event channel 8,
channel 1~4 status
Event bus 1 output setting
Event bus 2 output
setting
Event bus 3 output
setting
Event bus 4 output
setting
Event bus 5 output
setting
Event bus 6 output
setting
Event bus 7 output
setting
Event bus 8 output
setting
(R/W)
1: When PARA_SAVE “1” is set, save
R/W
parameters manually
Setting range Unit
Initial
value
ABS 0
0:Stop mode
1: Monitor mode
ABS 0
2: Run mode
0: PID auto tuning (AT) stop
1: PID auto tuning (AT) start
R/W
2: P.I.D auto tuning start.
ABS 0
stop after running
0: run stop (STOP)
1: run start (RUN)
0: NO run return
R/W
1: run return
ABS 0
1 (Return to
ABS
R/W 1: Parameter initialization ABS 0
All events OR run
7 Bit(128): Set “1” at event channel 8 occurrence
6 Bit(64): Set “1” at event channel 7 occurrence
5 Bit(32): Set “1” at event channel 6 occurrence
R
4 Bit(16): Set “1” at event channel 5 occurrence
3 Bit(8): Set “1” at event channel 4 occurrence
2 Bit(4): Set “1” at event channel 3 occurrence
1 Bit(2): Set “1” at event channel 2 occurrence
0 Bit(1): Set “1” at event channel 1 occurrence
ABS -
R
R
R
All events OR run
R
3 Bit(8): Set “1” at CH4 event occurrence
2 Bit(4): Set “1” at CH3 event occurrence
1 Bit(2): Set “1” at CH2 event occurrence
R
0 Bit(1): Set “1” at CH1 event occurrence
ABS -
R
R
R
R/W
R/W
R/W
Set corresponding event bus
R/W
output option at event occurrence
0: output (OFF)
R/W
1: output (ON)
ABS
R/W
R/W
R/W
run
0
28

Register address (HEX) Symbol
CH1 CH2 CH3 CH4
86(56) PRS
87(57) BPS
88(58) PRI Parity bit R/W
89(59) STP Stop bit R/W
90(5A) DLN Data length R/W
91(5B) RPT
95(5F) ADDR
96(60) MAX_CH
97(61) R_SYS System data R - ABS -
98(62) R_OPT Option data R - ABS -
99(63) ROMVER Firmware version R - ABS -
101
201
(C9)
202
(CA)
203
(CB)
204
(CC)
205
(CD)
206
(CE)
301
(12D)
302
(12E)
303
(12F)
304
(130)
305
(131)
306
(132)
(65)
102
(66)
103
(67)
104
(68)
105
(69)
106
(6A)
n : Number
of channel
401
PV Process value R EU (0 ~ 100%) ℃ -
(191)
402
SV Set value R/W EU (0 ~ 100%) ℃ EU (0%)
(192)
403
MV Manipulated Value R 0.0 ~ 100.0 % 0
(193)
404
CHSTS Channel status R
(194)
405
EVSTS
(195)
406
OUTSTS Output status R
(196)
Description
Communication
protocol
Transmission
speed (Bit per
second)
Communication
response delay
Communication
setup Address
Number of
channels
Event channel
by channel 1~8
status
Property
(R/W)
0 : PC-LINK
1 : PC-LINK with SUM
R/W
2 : Modbus ASCII
3 : Modbus RTU
0 : 9600 bps
1 : 19200 bps
R/W
2 : 38400 bps
3 : 57600 bps
4 : 76800 bps
0 : NONE
1 : ODD
2 : EVEN
1 : 1 Bit
2 : 2 Bit
7 : 7 Bit
8 : 8 Bit
0~10 delay time= process time
R/W
(maximum 25ms) +RTP X 10ms
R 1 ~ 32 ABS -
R 4 : 4 Channel ABS -
All error status OR run
15 Bit: Set “1” at System Data error
14 Bit: Set “1” at Calibration Data error
13 Bit: Set “1” at input circuit error
12 Bit: Set “1” at EEPROM error
11 Bit: Set “1” after 24 hours of auto toning (AT)
10 Bit: Set “1” at standard contact point
correction (RCJ) error
9 Bit: Set “1” when exceeding ±5% input range
8 Bit: Set “1” at input sensor error (B. OUT)
2 Bit: Set “1” at auto tuning (AT) run
1 Bit: Set “1” at monitor mode
0 Bit: Set “1” at run start
All events OR run
7 Bit(128): Set “1” at event channel 8 occurrence
6 Bit(64): Set “1” at event channel 7 occurrence
5 Bit(32): Set “1” at event channel 6 occurrence
R
4 Bit(16): Set “1” at event channel 5 occurrence
3 Bit(8): Set “1” at event channel 4 occurrence
2 Bit(4): Set “1” at event channel 3 occurrence
1 Bit(2): Set “1” at event channel 2 occurrence
0 Bit(1): Set “1” at event channel 1 occurrence
0: output (OFF)
1: output (ON)
Setting range Unit
Initial
value
0 (PC-
ABS
LINK)
0 (9600
ABS
bps)
2
ABS
(EVEN)
ABS 1 (1 Bit)
ABS 8 (8 Bit)
ABS 0
ABS -
ABS -
ABS -
Before staring Installation Operation Specifications
29

Register address (HEX) Parameter
CH1 CH2 CH3 CH4
107
207
(CF)
208
(D0)
209
(D1)
210
(D2)
211
(D3)
212
(D4)
213(D5)
~
220(78)
221
(DD)
224(E0)
~
244(F4)
245
(F5)
246
(F6)
247
(F7)
251
(FB)
307
(133)
308
(134)
309
(135)40(199)
310
(136)
311
(137)
312
(138)
313(139)
~
320(78)
321
(141)
324(144)
~
344(158)
345
(159)
346
(15A)
347
(15B)
351
(15F)
355(163)
(6B)
108
(6C)
109
(6D)
110
(6E)
111
(6F)
112
(70)
113(71)
~
120(78)
121
(79)
122(7A) 222(DE) 322(142) 422(1A6) EV.1VL
Multi Loop Controller
123(7B) 223(DF) 323(143) 423(1A7) EV.1HY
124(7C)
~
144(90)
145
(91)
146
(92)
147
(93)
151
(97)
152(98) 252(FC) 352(160)
153(99) 253(FD) 353(161)
154(9A) 254(FE) 354(162)
155(9B) 255(FF)
407
(197)
408
(198)
410
(19A)
411
(19B)
412
(19C)
413(19D)
~
420(78)
421
(1A5)
424(1A8)
~
444(1BC)
445
(1BD)
446
(1BE)
447
(1BF)
451(1C3)
452(1C4)
453(1C5)
454(1C6)
455(1C7)
n : Number
of channel
EV.1DLY
EV.8DLY
EVSTOP
Description
Reference
RJC
TC
INP Set input type R/W
CHMD Set channel mode R/W
AT
OUT Input type R
~
EV.1TY
EV.2~
~
EV.8~
LBA
LBD
PB
TI Set integral time R/W 1 ~ 3600 Sec. 240
TD
AP
MR Set Manual Reset R/W 0.0 ~ 100.0 % 0.0
junction
compensation
temperature
value
Thermo couple
(TC) value
Run PID auto
tuning(AT)
Set event delay R/W 0 ~ 9999 Sec. 0
Set event channel 1
type
Event set value of
event channel 1
Event channel 1,
event hysteresis
Set event channel
2~8 event type, set
value and hysteresis
Set loop break
event time
Set loop break
event dead band
Set stop running at
event occurrence
Set proportional
band
Set differentiation
time
Set 2 DOF PID
ALPHA
Property
(R/W)
R EU (0 ~ 100%) ℃ -
R EU (0 ~ 100%) ℃ -
0~18: thermo couple (TC)
20~23: Resistance Temperature Detector (RTD)
30~ 32:direct current voltage (DCV)
* Refer to input type
0: Stop mode
1: Monitor mode
2: Run mode
0: PID auto tuning (AT) stop
R/W
1: PID auto tuning (AT) start
0:RELAY
1:SSR
2.SCR
None(OFF)
1:Deviation high limit
2: Deviation low limit
3. Deviation high/low limit
4: Within deviation scope
R/W
5: Deviation high limit (stand by)
6: Deviation low limit (stand by)
7. Deviation low/high limit
(stand by)
8. Within deviation (stand by
9:PV high limit
R/W EUS (0 ~ 100%) ℃
R/W EUS (0 ~ 10%) ℃
R/W Same as event channel 1
R/W 0(OFF), 1~7200 Sec. 0 (OFF)
R/W EUS (0 ~ 100%) ℃
0: continuous run
R/W
1: stop run
R/W EUS (0 ~ 100%) ℃
R/W 1 ~ 3600 Sec. 60
R/W 1 ~ 100 ABS 50
Setting range Unit
ABS
ABS
ABS 0
ABS
10: PV low limit
11: PV high limit (stand by)
12:PV low limit (stand by)
13: SV high limit
14: SV low limit
15: Loop break (LBA)
16: 17: Run start (RUN)
18: Run/monitor mode
(READY)
19: FAIL
ABS 0 (OFF)
ABS
K Type)
product
(continuous
Initial
value
1
(TC
0
(stop
mode)
Follow
specs
EUS
(0%)
EUS
(0.2%)
EUS
(100%)
0
run)
EUS
(2%)
30

Register address (HEX) Parameter
CH1 CH2 CH3 CH4
154(9A) 254(FE) 354(162)
n : Number of
454(1C6)
channel
Description
AP Set 2 DOF PID ALPHA R/W 1 ~ 100 ABS 50
Property
(R/W)
Setting range Unit Initial value
155(9B) 255(FF) 355(163)
156(9C)
256(100) 356(164) 456(1C8)
257(101)
157(9D)
158(9E) 258(102) 358(166)
159(9F) 259(103) 359(167)
260(104) 360(168)
160(A0)
161(A1) 261(105)
162(A2) 262(106)
163(A3) 263(107)
264(108)
164(A4)
165(A5)
265(109)
166(A6)
266(10A)
171(AB) 271(10F) 371(173) 471(1D7) BS Set input correction R/W EUS (-100 ~ 100%) ℃ EUS (0%)
172(AC) 272(110) 372(174) 472(1D8) FL Set input filter R/W 0 ~ 100 ABS 0
173(AD) 273(111) 373(175) 473(1D9) SVH Set SV high limit R/W EU (0 ~ 100%) ℃ EU (100%)
174(AE) 274(112) 374(176) 474(1DA) SVL Set SV low limit R/W EU (0 ~ 100%) ℃ EU (0%)
175(AF) 275(113) 375(177) 475(1DB) FRH Set PV high limit R/W EU (0 ~ 100%) ℃ EU (100%)
176(B0) 276(114) 376(178) 476(1DC) FRL Set PV low limit R/W EU (0 ~ 100%) ℃ EU (0%)
177(B1) 277(115) 377(179) 477(1DD) SLH
178(B2) 278(116) 378(17A) 478(1DE) SLL
179(B3) 279(117) 379(17B) 479(1DF) DOT Set decimal point R/W
455(1C7)
457(1C9)
357(165)
458(1CA)
459(1CB)
460(1CC)
461(1CD)
361(169)
362(16A)
462(1CE)
363(16B) 463(1CF)
464(1D0)
364(172)
365(173)
465(1D1)
366(174)
466(1D2)
MR Set Manual Reset R/W 0.0 ~ 100.0 % 0.0
RELAY
CT Set control cycle R/W 1 ~ 100 Sec.
Set emergency output
PO
Set hysteresis at ON/OFF
HYS
RO
RUP
RDN
RMIN
RHRS
DR
OHL
OLL
Set output at stop,
temperature at RAMP
temperature at RAMP
Set SV change time (min.)
Set SV change time (hr.)
Manipulated Value
Manipulated Value
Set scale high limit at
Set scale low limit at
control
monitor status
Set SV increase
control
Set SV decrease
control
at RAMP control
at RAMP control
Set control run
Set high limit to
Set low limit to
DCV input setting
DCV input setting
R/W 0.0 ~ 100.0
R/W EUS (0 ~ 10%) ℃
R/W 0.0 ~ 100.0 % 0
R/W EUS (0 ~ 100%)
EUS (0 ~ 100%)
R/W
R/W 0 ~ 1000 Minute 0
R/W 0 ~ 100 Hour 0
0: Reverse run
(heating) control
R/W
1: Forward run (cooling)
control
R/W 0.0 ~ 100.0 % 100.0
0.0 ~ 100.0 % 0.0
R/W
R/W EU (0 ~ 100%) mV EU (100%)
R/W EU (0 ~ 100%) mV EU (0%)
0 ~ 3 :
decimal point digit
: 30 Sec.
S.S.R :
2초 Sec.
% 0
(0.2%)
EUS (0%)
℃
℃ EUS (0%)
(Reverse
ABS
run (heating)
control)
ABS 0
EUS
0
Before staring Installation Operation Specifications
31

3.3. Manipulation and run
3.3.1 Input section
● Input type (INP)
It is a parameter setting input signal (sensor) type, and once this input type is set, input scope (range) and
decimal point indication or not is determined depending on the type of input. Input type can be set differently by
channel. All parameters related to PV are initialized when changing input type.
※ Set value (SV), Event Set value (EVVL), Event Hysteresis(EVHY), Event Loop break Dead Band (LBD), Set
value High/Low Limit (SVH/SVL), Reading High/Low Limit (FRH/FRL), Scale High/Low Limit Setting (SLH/SLL),
Set value Increase Temperature (RTUP), Set value decrease temperature(RTDN), input correction (BS), ON/OFF
control hysteresis (HYS),decimal point(DOT),proportional band(PB), integral time (TI), differential time (TD) 2 DOF
ALPHA value (AP) set value(SV),event set value(EVVL),event hysteresis (EVHY), event loop break alarm dead
band (LBD)
Symbol INP Input type Input scope (oC) Degree
1 K
2 K -199.9 ~ 1370.0
3 J -200 ~ 1200
4 J -199.9 ~ 1200.0
5 E -199 ~ 999
6 E -199.0 ~ 999.0
7 T -50 ~ 400
8 T -50.0 ~ 400.0
TC
Multi Loop Controller
RTD
DCV
F.S is from minimum value to maximum value of possible reading range of each input, and digit is
minimum indication value.
(Note 1) 0~400oC range: ±10% of F.S±1digit
(Note 2) Below 0oC: ±1% of F.S±1digit
(Note 3) -150.0 ~ 150.0oC range: ±1% of F.S±1digit
※ When using 4 -20mA direct current input, please select input code 31, and attach 250 Ω of electric resistance
to both input terminals.
32
9 R 0 ~ 1700
10 B (Note1) 0 ~ 1800
11 S - 0 ~ 1700
12 L
13 L -199.0 ~ 900.0
14 N - -199 ~ 1300 ±0.6 % of F.S ±1digit
15 U
16 U -50.0 ~ 400.0
17 W - 0 ~ 2300
18 PLII - 0 ~ 1300
20 KPt100
21 KPt100 -199.9 ~ 500.0
22 Pt100 - -200 ~ 640
23 Pt100 - -199.9 ~ 640.0
30 0 - 10 V d.c. 0 ~ 10000
31 1 - 5 V d.c. 1000 ~ 5000
32 0 - 100 ㎷ d.c. 0 ~ 1000
(Note2)
(Note2)
(Note2)
(Note3)
-200 ~ 1370
±0.3 % of F.S ±1digit
-199 ~ 900
-50 ~ 400
-200 ~ 500
±0.3 % of F.S ±1digit

● Input correction (BS)
Parameter to be set when temperature correction to Process value (PV) is required
Reading can be expressed as addition of reading before input correction and set value of input
correction.
● Input filter (FL)
Parameter to remove noise when it comes in to Process value (PV) repetitively. Noise not only
impairs control feature, but also causes surge in manipulated value. However, if input filter is set
large, actual reading is expressed with time delay.
Before staring Installation Operation Specifications
Input
PV Filter
Filtering input
PV - PV_1
Filtering
※ PV : Process value
PV_1 : Previous Process value
FL : Input filter (FL) set value
Ts : Sampling time (50 ms)
PV = + PV_1
FILT / Ts +1
● Reference junction compensation (RJC)
When using temperature sensor as TC, as a principle, PV is expressed by correcting standard
contact point correction. To verify TC and RJC individually, corresponding parameter can be used.
● Limit to Set value (SV) by Set Value High (SVH) and Set Value Low (SVL)
SV is limited by SVH and SVL. Limited set value can be changed within the range of input type.
● Limit to Process value by Full Range High (FRH) and Full Range Low (FRL)
Set High and Low range of process value (PV). If it is out of the set range, OVER of alarm group 1
of CHESTS (channel status) is occurs. The control is operating normally.
● Input scale range high (SLH) / scale range low (SLL) setting
It applies only if input type is set to voltage input (DCV).
The input range of PV is adjusted to the high limit or low limit of set scale.
● Parameter setting lock (LOCK)
This is a parameter that prohibits parameter setting.
LOCK set value Details
0 All parameters setting possible
1 Possible to set only SV, R/S, AT, CHEN parameters
2
All parameters settings are impossible,
but LOCK parameter is possible to set.
33

3.3.2 Control section
● Channel mode (CHMD)
Channel mode consists of 3 types including “stop mode”, “monitor mode”,
and “run mode” and different setting for each channel is possible.
●
Setting are completed at channel mode (CHMD) parameter, run status at each channel mode
is as follows.
Channel mode
Stop mode Control run (X), Even occurrence (X) Control run (X), Even occurrence (X)
Monitor mode Control run (X), Even occurrence (O) Control run (X), Even occurrence (O)
Run mode Control run (O), Even occurrence (O) Control run (X), Even occurrence (O)
※ Run mode, if in run stop status, it functions similarly as the monitor mode.
This status is called READY state.
● Run setting (R/S) and run setting state saving (R/S_S)
If “1(ON)” is set to run setting (R/S), it becomes “run start (RUN)” state, and all channels with
channel mode set to “run mode” start control runs, and if “0(OFF)” is set to run setting (R/S),
it becomes “run stop (STOP)” state, and all channels terminate control run. Also, as run setting
save option can be set at R/S_S parameter, when power is first supplied, this run setting state can
be maintained or set as “run stop (STOP)” state.
● Direction (DR)
This parameter is to set control run of each channel, and can be set at forward run or reverse
run. When using as heating /cooling control by setting H/C parameter to “1”, control run (DR)
setting is disregarded
Control run Process value (PV) Manipulated Value (MV)
Multi Loop Controller
Reverse run
(Heating control)
Forward run
(Cooling control)
When run setting
(R/S) is run start (RUN)
Increase Decrease
Decrease Increase
Increase Increase
Decrease Decrease
When run setting (R/S) is run stop
34
3.3.2 Heating, heating/cooling control (HC)
Control method can be set at heating control or heating/cooling control. If heating/cooling control
is set, control output is divided into 2 signals, one for heating and one for cooling. For control
method, heating and cooling can be set as PID control or ON/OFF control respectively for output.
If heating side proportional band (PB) is set to “0oC”, heating side is controlled as ON/OFF control
output, and if cooling side proportional band (PBC) is set to “0oC”, cooling side is controlled as
ON/OFF control output,

3.3.2 Dead band of heating/cooling control (HC_DB)
Upon heating/cooling control, dead band of heating side and cooling side manipulated value
can be set up. For ON/OFF control, dead band of both heating side and cooling side is as follows.
Hysteresis
Hysteresis
Before staring Installation Operation Specifications
ON
Colling side outputHeaating side output
OFF OFF
DEAD BAND
When heating side is PID and Cooling side is ON/OFF control
OUT (%)
100 %
Heaating side output
0 %
DEAD BAND
OUTPUT (%)
100 % 100 %
Heaating side output
0 % 0 %
DEAD BAND
Hysteresis
Colling side output
Colling side output
ON
ON
OFF
< When heating and cooling sides are PID control and dead band as much '+' set value. >
"-" set value dead band and the dead band for Heading & Cooing PID control are shown as below.
OUTPUT(%)
100 % 100 %
Heaating side output
0 % 0 %
DEAD BAND
< Heating & Cooling are PID control and "-" set value dead band >
Colling side output
35

● Proportional Band (PB), Integral Time (TI), Differential time (TD)
Constant to control PID. These parameters are set up automatically if auto tuning (AT) is performed
● Auto tuning (AT)
Normally, for 2 DOF P.I.D control, Values of P.I.D constants such as proportional band (PB), integral
time (TI), differential time (TD) should be set to targeted temperature value of equipment to be
controlled, and proper values be applied. If auto tuning (AT) parameter is set to “1”, P.I.D constants
is automatically set up after pre-set control run is performed, and after AT parameter is changed to
“0”, P.I.D constant value applied control starts.
If auto tuning (AT) parameter is set to “1”, corresponding channel mode is changed to run mode,
run setting (R/S) is set to “1”, and it becomes run start (RUN) state.
Run
start
SV
HYS
OFF OFF
Output
● ON/OFF control setting and Hysteresis (HYS)
Multi Loop Controller
If proportional band (PB) is set to “0”, control method is changed from PID control to ON/OFF
control. For ON/OFF control, Hysteresis value is applied and setting can be completed at HYS
parameter.
PV
ONON
OFF
36

● Output cycle (CT)
A cycle that becomes ON and OFF of RELAY or voltage pulse (SSR) output is called “output
cycle” and can be set at CT parameter. For RELAY output, if output cycle is set short, it can show
quick responses, but lifespan is shortened. Thus, setting output cycle less than 20 seconds is not
recommended.
MV = 30 %
= 3S
MV = 50 %
= 5S
MV = 70 %
= 7S
Before staring Installation Operation Specifications
ONRelay run ON ONOFF
Control cycle (CT) = 10 sec.
Control cycle (CT) = 10 sec.
OFF
Control cycle (CT) = 10 sec.
● 2 DOF PID Alpha (AP)
Response in general closed loop control system can be mainly divided into response to set value
change and response to disturbance, and existing PID (1 DOF) algorithm is limited to optimize only
one response for these two responses. 2 DOF algorithm was applied to overcome this limitation,
and response optimization to set value change and appropriate response to disturbance can be
obtained. Alpha (AP) parameter set value (SV) is used for adjusting response feature to set value
(SV).
175
155
135
115
95
75
55
35
0 100
200 300 400 500 600 700 800
Reference Alpha 0 Alpha 50 Alpha 100
37

● Manipulated Value (MV) high limit (OHL)/low limit (OLL)
Controlled manipulated value can be limited by high limit value (OHL) and low limit value (OLL)
Output signal
20 ㎃
12 ㎃
4 ㎃
● Manual reset (MR)
If Integral Time (TI) is set to “0” at P.I.D control, it operates in PD control. For PD control, steadystate deviation occurs between process value (PV) and set value (SV). Changing manipulated
value to reduce such deviation is called manual reset, and the setting can be completed at MR
parameter.
● Output capacity (PO) at temperature sensor disconnection (BURN-OUT)
For temperature sensor (BURN-OUT) disconnection, output capacity can be set and at PO
Multi Loop Controller
parameter. Output capacity may vary depending on the type of warning. Please refer to “Run at
warning occurrence.”
● Output capacity (RO) at run stop/monitor (READY)
If channel mode (CHMD) is monitor mode or run mode, and with run stopped, control output
capacity can be set at RO parameter.
-5 %
Low limit
(OL-L)
50 %
Possible
setting range
105 %
High limit
(OL-H)
Output limit(%)
38

● Ramp function (RATE)
It refers to the inclination that reaches set value (SV) after change from set value (SV) before change,
temperature value set at RTUP (SV increasing temperature), RTDN (SV decreasing temperature) set
value can have inclination of (temperature value / time), and be increased or decreased based on
time set at RTMIN(SV transit time (min.)), RTHRS(SV transit time (hour)).
Set value that changes based on time can be verified with current target set value (TSV) parameter.
Upon executing auto tuning (AT), ramp function stops, and auto tuning is performed using the last set
value (SV).
Set value change rate transit
Before staring Installation Operation Specifications
Setting
Value
SV before
change
Setting
value
0 1 2 3 4 5 분
※ Run is not guaranteed if set value change rate per min. is set below 0.5oC.
(below 3oC of set value change rate per hour)
SV after
change
Ascending temperature
per transit time
Change rate of set value
Time
Setting
Value
SV before
change
Descending temperature
per transit time
SV after
change
Time
39

3.3.3 Event section
● Event channel (EVCH) and event bus output (EVBUS)
Maximum of 8 channels by input channel are provided, and each can be set with different event
type (EVT) and set value (EV). However event channel with event bus output is limited to 8
channels. Upon occurrence of set event, event (EV) LED of front section is turned on, event state
(EV_STS) parameter is set to “1”. Event occurrence can be verified at event channel state (EVSTS.
[1-4]) parameter by input channel, and at input channel state (EV.[1-8]) parameter by event
channel. If event occurs only with event channel that EVBUS.[1-8] parameter is set to “1”, event
bus is used for output.
1Channel
2Channel
Process event 1~8
at ML-D2H
Multi Loop Controller
If one module is made up with several units combined, event bus output occurs with OR
condition.
Send event signal to
event bus 1~8
Process event 1~8
at ML-D4
EV BUS1
EV BUS2
EV BUS3
EV BUS4
EV BUS5
EV BUS6
EV BUS7
EV BUS8
1Channel
2Channel
3Channel
4Channel
EV BUS1
EV BUS2
EV BUS3
EV BUS4
EV BUS5
EV BUS6
EV BUS7
EV BUS8
Relay output to event
bus 1~8 occurs
EV BUS1
EV BUS2
EV BUS3
EV BUS4
EV BUS5
EV BUS6
EV BUS7
EV BUS8
Send event signal to
event bus 1~8
Relay output to event
1~8 occurs at ML-E
Relay output to #1 and
#2 event occurs with
OR condition at ML-E
40

● Event type (EVTY)
Event type setting can be performed with event number at EVT parameter.
Event
type
Event type
0 None X
1 Deviation high limit X
2 Deviation low limit
3
Deviation high/
low limit
4 Within deviation range
5 Deviation high limit O
6 Deviation low limit O
7
Deviation high/
low limit
8 Within deviation range O
9 PV high limit X
※ O: have stand by, X: do not have stand by
Run based on event type is as follows.
Event
type
Deviation
high limit
Event
run
EVT_HYS
Stand by
(have/not have)
X
X
X
O
PV
Alarm zone
Event
type
Event type
10 PV low limit X
11 PV high limit O
12 PV low limit
13 SV high limit X
14 SV low limit X
Loop break alarm
15
(LBA)
16 -
17
Run
18 Stop/monitor (Ready) X
19 Fail X
Event
type
PV
high limit
EVT_HYS
Stand by
(have/not have)
*1: Only for ML-D2H
Event
run
Alarm zone
Before staring Installation Operation Specifications
O
X
-
X
PV
PV
Deviation
low limit
Deviation
high/low
Alarm zone
PV
Alarm zone
EVT_HYS
limit
Within
deviation
Alarm zone
range
※ ▲ : Event set value (EV) △: SV
EVT_HYS
EVT_HYS
PV
Alarm zone
EVT_HYSEVT_HYS
PV
PV
low limit
PV
SV
high limit
SV
low limit
Alarm zone
PV
Alarm zone
EVT_HYS
PV
Alarm zone
41

● Event set value (EVVL) and event hysteresis (EVHY)
Event set value is set at EVVL parameter, and event hysteresis at EVHY.
Setting range is different depending on event type.
Event type
Deviation high limit
Deviation low limit EUS (0 ~ 100 %) EUS (100 %) EUS (0 ~ 10 %)
Deviation
high/low limit
Within deviation range EUS (0 ~ 100 %) EUS (0 %) EUS (0 ~ 10 %)
PV high limit EU (0 ~ 100 %) EUS (100 %) EUS (0 ~ 10 %)
PV low limit EU (0 ~ 100 %) EUS (0 %) EUS (0 ~ 10 %)
SV high limit EU (0 ~ 100 %) EUS (100 %) EUS (0 ~ 10 %)
SV low limit
Heater disconnection
(HBA)
* Setting range and hysteresis are not applied to events other than the above types.
* If event type (EVTY) is changed, event set value (EVVL) and event hysteresis (EVHY) are initialized.
If process value (PV) is out of pre-set event value (EVVL), event occurs, and for release, it should approach up
to event hysteresis (EVHY). For process value (PV) high event, event occurrence and release are as below.
Event set value (EV),
EV_HYS
Multi Loop Controller
Setting range Initial value
EUS (0 ~ 100 %)
EUS (0 ~ 100 %) EUS (100 %)
EU (0 ~ 100 %) EUS (0 %)
0 / 1 ~ 50 A 0 (OFF) 2 A
start run
PV
EUS (100 %) EUS (0 ~ 10 %)
Hysteresis
EUS (0 ~ 10 %)
EUS (0 ~ 10 %)
ONOFFOFF ONEvent
42
● Event stand by run
If correspond to below conditions, in event stand by run, very first event does not take place at
event occurrence.
- When power is supplied
- When run is started
- When event type (EVT) is changed
- When set value (SV) is changed

Event type Event motion
Start run
EV
PV high limit event
with stand by run
Event
Start run
EV
PV high limit event
without stand by run
PV
Stand by
PV
ONOFFOFF
ONOFFOFF ONEvent
● Loop break event
With loop break alarm function, state such as heater break and incorrect wiring, break and short circuit
of temperature sensor, and output circuit irregularity can be detected. Loop break event time (LBT) is set
automatically when running auto tuning by setting “15” at event type (EVTY), and with loop break alarm time (LBT)
set to double of total integral time (TI). If conditions are as below during loop break alarm time (LBT), loop break
alarm (LBA) occurs.
Control
run (DR)
Reverse run
(heating control)
Forward run
(cooling control)
* Loop break alarm occurs only if manipulated Value (MV) is 100% or 0%.
※ If process value (PV) is within the range of proportional band (PB), and if loop break dead band
(LBD) parameter is set and process value (PV) is within the range of dead band, event does not
occur even with loop break alarm (LBA) occurring condition, and occurs only if out of proportional
band (PB).
•LBD › PB
Event area PB Event area
Manipulated Value
(MV)
100 % No ascending of over 2oC (if direct current voltage DCV, 2%)
0 % No descending of over 2oC (if direct current voltage DCV, 2%)
100 % No descending of over 2oC (if direct current voltage DCV, 2%)
0 % No ascending of over 2oC (if direct current voltage DCV, 2%)
Loop break alarm (LBA) occurrence condition
Before staring Installation Operation Specifications
LBD LBDSV
•LBD ≦ PB
Event area PB Event area
LBD LBDSV
43

● Run, stop/monitor (Ready), FAIL event
For run state event, event (EV) LED is not turned on even when corresponding event occurs, and with
no impact at parameters of event state (EV_STS), event channel state (EVSTS.[1~4]) by input channel,
and event channel state (EVSTS.[1~8]STS) by input channel, and has effect only when used by
connecting with event unit (ML-E8). It can be used by setting run state event, and with corresponding
event bus output parameter set to “1”.
Run state event Occurrence condition
Run state event
Stop/monitor (READY) state event
FAIL state indication event
Among run state indication events, FAIL event operates regardless of channel modes.
● Control stop (EVSTOP) at event occurrence
If event specified in each input channel occurs, control run can be set to sustain or stop. When setting
EVSTOP parameter to “1”, if event occurs, control run stops and if event is released, control run restarts.
● Control stop setting(COMCHK) at RS485 communication disconnection
In case of no response for transmission for pre-set time by setting communication connection
sustaining time with RS485 Master, control can be stopped, and it can be set at COMCHK
parameter.
3.3.4 State indication and setting
Multi Loop Controller
● Front side LED indication
Power (PWR) LED
Communication
(COM) LED
Event (EV) LED
ML-D2H ML-D4
control output
(CH1~2) LED
control output
(CH1~4) LED
Upon completion of initialization for run after power is supplied, LED light is turned on.
Initialization time is about 3 seconds.
During RS485 communication, if data of address set with front section setting switch is
received, LED blinks. If data other than pre-set address is received, COM LED remains
turned off.
If at least one of pre-set event occurs, EV indication LED is turned on.
As event no. 17~19 of run, stop/monitor (READY), FAIL event are for informing run state,
LED will not turn on at event occurrence.
Manipulated value controlled based on channel is indicated in 4 seconds cycle and 8
steps by blinking LED light.
If manipulated value is 50%, it turns on for 2 seconds, and turns off for 2 seconds, and for
25%, it turns on for 1 second, and turns off for 3 seconds
When Auto tuning (AT) is in progress: Repeatedly blinking every 0.2 seconds
If channel mode (CHMD) is “run mode” and run setting (R/S) is “run
start”, event occurs.
If channel mode (CHMD) is “monitor mode” or “run mode”, and run
setting (R/S) is “run stop”, event occurs.
Event occurs at normal state. If abnormality occurs to power source,
ROM, and RAM state, event occurrence stops.
44

● LED display at warning occurrence
LED state display Warning occurrence state
1. System Data error
When “[Warning group2] alert occurs,
all LEDs repeat 0.5 second cycle blinking
When “[Warning group1] alert occurs,
power (PWR) LED repeats 0.5 second cycle
blinking
Power (PWER), communication (COM), event
(EV) LED repeat 0.5 second cycle blinking
※ For warning group, refer to input channel state display (CHSTS)
2.Calibration Data error
3. Input circuit error
4. EEPROM error
1. Auto tuning is not terminated within 24 hours
2. Standard contact point correction (RJC) error
3. Within ±5% of input range, OVER
4. Input sensor error (BURN-OUT)
If communication is disconnected by exceeding RS485
communication sustaining time
● Input channel state display (CHSTS)
Input channel state displays in BIT MAP at CHSTS parameter.
It is comprised of 16 bit, high 9~16 bit indicates “warning state”, and 1~3 bit “run sate”, and bit is set
to “1” when reaching corresponding state. OR run is performed if several warnings occur.
CHSTS Name Description
Bit 16 SYD System Data error [32768]
Bit 15 CALIB Calibration Data error [16384]
Bit 14 ADC Input circuit error [8192]
Bit 13 EEPROM EEPROM error [4096]
Bit 12 ATE Auto tuning does not terminate within 24 hours[2048]
Bit 11 RJC Standard contact point correction (RJC) error [1024]
Bit 10 OVER Within ±5% of input range, OVER [512]
Bit 9 B.OUT Input sensor error (BURN-OUT) [256]
Bit 4~8 - Not used -
Bit 3 AT Indicate auto tuning is operating [4] -
Bit 2 MONIT
Bit 1 Run Display control run and event occurring input channel state [1] -
※ If Run state and B.OUT warning occurrence, CHSTS parameter is set to “257.”
Control run does not work, display event occurring input channel state [2]
Warning
group
[Warning
group 2]
[Warning
group 1]
-
Before staring Installation Operation Specifications
45

● Event channel state indication
At event occurrence, front section event (EV) LED is turned on and it can be verified
with parameters below.
Parameter
Event status (EV_STS)
Event channel state by input
channel (EVSTS.[1~4])
Event channel state by input
channel (EV.[1~8]STS)
● Control and event bus output state indication
If output occurs by parameter indicating state of occurrence of output using control and event bus,
“1” is set.
Parameter Description
Control output state (OUTSTS) Indicate control output state of channel
Event bus output state
(DOSTS)
Multi Loop Controller
● Other state display
Parameter Description
Control output type (OUT) Indicate control output type
Switch address (ADDR) Indicate set value of front section setting switch
Number of channel (MAX_CH) Indicate number of input channel
System data (R_SYS) Set value in order to distinguish product
Option data (R_OPT) Set value in order to distinguish product
Version (ROMVER) Indicate firm ware version
Description
If at least one event of pre-set event channels occurs, “1” is set.
Event channel state can be confirmed by input channel.
Used when verifying which number event channel caused event in
corresponding input channel
Composed of 16 bit, and processed by OR run.
Bit 1: input channel, Bit 2: input channel 2,
Bit 3: input channel, Bit 4: input channel 4
Input channel state can be verified by event channel.
Used when verifying which input channel occurred event in corresponding
event channel
Composed of 16 bit, and processed by OR run.
Bit 1: event channel 1, Bit 2: event channel 2,
Bit 3: event channel 3, Bit 4: event channel 4,
Bit 5: event channel 5, Bit 6: event channel 6,
Bit 7: event channel 7, Bit 8: event channel 8
Indicate event bus output state
Event output can occur only if event occurs in event channel corresponding
channel at event bus output (EVBUS) parameter is set to “1”, and output state
can be changed.
46
● Execute parameter state initialization (PARA_INT)
Initialize pre-set parameter and restore to factory shipments condition
After parameter initialization, turn off power and turn back on power
● Set whether to save parameter used in communication (PARA_SAVE)
This function is to set whether to save parameter that used in communication, and sets by PARA_
SAVE parameter. If PARA_SAVE is set to “0”, parameter is saved, and if it is set to “1”, parameter value
approached by communication is not saved.

●Execute all parameter save (PARA_COPY)
When parameter is not saved by RS485 communication, with this function, all parameters can be saved
by setting PARA_SAVE to “1”. When parameters such as set value (SV) change frequently, this is used
to increase memory lifespan by saving parameter at desired time after setting PARA_SAVE to “1”, in
order to prevent shortening lifespan of memory, where parameters are saved
3.3.5 Warning occurrence and handling
Depending on warning occurrence type, process value (PV) and Manipulated Value (MV) are
processed as follows.
Typ e Cause Process value (PV) display Manipulated Value (MV) state
B.OUT Input sensor error
OVER
EEPROM EEPROM error Reverse control: 105%, control: -5% 0%
CALIB
SYSD System Data error Reverse control: 105%, control: -5% 0%
PV is out of input range
within ±5%
RJC RJC error
ATE Auto tuning error Normal process Normal process
ADC Input circuit error Reverse control: 105%, control: -5% 0%
Calibration error
Reverse run: 105%,
forward run: -5%
Normal process Normal process
Reference junction compensation
temperature is normalized to the deleted
temperature value.
Reverse control: 105%, control: -5% 0%
PO output after closing control
Reference junction compensation
temperature is normalized to the
deleted temperature value.
Before staring Installation Operation Specifications
47

4. Specification
▶ Performance
Degree of indication ±0.3% of FS ±1 Digit
Insulation resistance Over 500 V d.c. 20 M Ω (between power section and input terminal)
Withstanding voltage
▶ Input
Thermo couple K, J, E, T, R, B, S, L, N, U, W, PL2
Thermo-resistor Pt100 Ω, KPt100 Ω
Direct current voltage 0 - 100 mV, 1 - 5 V, 0 - 10 V
Sampling cycle 50 ms.
Input indication resolving power Below minimum unit of input range
Input impedance Thermo couple and direct current voltage input: over 1M Ω
Impact of allowed input resistance About 0.2 uV / Ω
Allowed input conducting wire
resistance
Allowed input voltage
Input correction ±100% of input range
Multi Loop Controller
Cold junction compensation error ±1.5 ℃ (0 ~ 50 ℃)
Input signal break detection
750 V a.c. 1 min. (power section and input terminal)
Individual section by channel through
INP setting parameter
Thermo-resistor
(below 10 Ω. however, resistance among 3 lines should be same)
Within -2 – 5 (Thermo couple, thermo-resistor), within -5 – 12 V
(direct current)
up scale
48
▶ Output
Control output
(ML-D)
RELAY
SSR
SCR
1a contract point
250 V a.c. 3 A, 30 V d.c. 3 A
Over 12 V
(over 600 Ω of load resistance) if short circuit, limit to about 25 mA
Time resolving power: larger side between control cycle 0.1% or 10 m
4 -20 mA d.c. (below load resistance 600 Ω)
Degree: ±0.1% of FS (4-20 mA scope)

▶ Control function
Control
method
Proportional band 0 ~ 100 % of FS
Differential time
Proportional cycle
ON/OFF control Set proportional band to “0”
Alarm setting range 0~100% of input range (absolute alarm), ±100% of input range (deviation alarm)
Alarm hysteresis By EVHY parameter setting
Heater
disconnection
alarm
ML-D2H
ML-D4
Control run
Integral time 0 ~ 3,600 sec.
Manual reset Possible to use manual RESET setting when integral time is 0 second
Alarm type By EVTY parameter setting (19 types)
ML-D2H
PID (heating/cooling concurrent control) / 2 DOF PIC (single control)
/ ON-OFF control
2 DOF PID (Auto tuning support) / ON-OFF control
Random selection of reverse run (heating) / forward run (cooling)
(DR parameter setting)
0 ~ 3,600 sec.
About 25 ~ 30 seconds (relay control output),
2 ~ 4 seconds (voltage pulse (SSR) control output)
Possible to use in ON/OFF control, time proportional control output
(impossible to detect if output ON/OFF time is less than 0.2 second)
Measuring current: 1-5 A a.c. (resolving power: 0.5 A ± 5% of FS ±1 Digit)
Heater disconnection detection use (CT type) model name: CT-50N
Before staring
InstallationInstallation
Operation Specifications
▶ RS232C Communication
Communication method RS-232 EIA standard
Maximum communication
distance
Transmission speed 9600 bps
Start bit 1 bit
Data length 8 bit
Parity bit Even
Stop bit 1 bit
Support protocol PC-Link
15 m
49

▶ RS485 communication
Communication method RS-485 EIA standard / 2 line type semi-double
Maximum number of
access
Maximum communication
distance
Communication sequence No sequence
Communication speed
Start bit 1 bit
Data length 7, 8 bit [initial value: 8]
Parity bit None, Odd, Even [initial value: Even]]
Stop bit 1, 2 bit [initial value: 1]
Response time Reception handling time + (response time x 10 ms)
Support protocol PC-Link, PC-Link with SUM, Modbus ASCII/RTU [initial value: PC-Link]
31 units
1200 m
9600, 19200, 38400, 76800 bps [initial value: 9600]
▶ Power source specification
Power source voltage 24 V d.c.
Voltage regulation ±10% of power source voltage
Maximum 7W below ML-D4S/C, ML-D2HMS/SS
Power consumption
Maximum 5W below ML-D4M, ML-D2HMM
Maximum 3W below ML-E
▶ General specification
Multi Loop Controller
Usage surroundings temperature 0 ~ 50 ℃
Usage surroundings humidity 35 ~ 85% RH (however, there should not be condensation)
Run environment Should not be areas with toxic gas, magnetic field or dust
Warming up time Minimum 30 minutes
Influence by surrounding
temperature
Influence by power supply change Larger side between ±3 uV / 10 V or ±0.03% of FS / 10 V
Storage temperature -25 ~ 65 ℃
Storage humidity 5 ~ 95% RH (however, there should not be condensation)
Shock Less than 1 m in packaged condition
Weight About 220g (excluding box)
50
Thermo couple, direct current voltage: Larger side between ±3 uV /
oC or ±0.03% of FS / oC
Thermo-resistor: Below ±0.1oC / oC

▶ Display
Display score 7점
LED display based on status
Power source (PWR): red turns on
Display detail
Event state (EV): red turns on
RS485 communication state (COM): green turns on
Control state by channel (CH1 ~ CH4): red turns on
▶ Event output (ML-E)
Contact point method: 1a contact point
RELAY
250 V a.c. 3 A, 30 V d.c. 3 A
0 : None(OFF)
1 : Deviation high limit
2 : Deviation low limit
3 : Deviation high/low limit
4 : Within deviation scope
5 : Deviation high limit (stand by)
Event output
(ML-E)
8 points
6 : Deviation low limit (stand by)
7. Deviation low/high limit (stand by)
8 : Within deviation (stand by)
Event
9 : PV high limit
type
10 : PV low limit
11 : PV high limit (stand by)
12 : PV low limit (stand by)
13 : SV high limit
14 : SV low limit
15 : Loop break alarm (LBA)
16 : Heater break alarm (HBA)
17 : Run start (RUN)
18 : Run/monitor mode (READY)
19 : FAIL
ML-D2H ML-D4
0 : None(OFF)
1 : Deviation high limit
2 : Deviation low limit
3 : Deviation high/low limit
4 : Within deviation scope
5 : Deviation high limit (stand by)
6 : Deviation low limit (stand by)
7. Deviation low/high limit (stand by)
8 : Within deviation (stand by)
9 : PV high limit
10 : PV low limit
11 : PV high limit (stand by)
12 : PV low limit (stand by)
13 : SV high limit
14 : SV low limit
15 : Loop break alarm (LBA)
16 : 17 : Run start (RUN)
18 : Run/monitor mode (READY)
19 : FAIL
Before staring
InstallationInstallation
Operation Specifications
51

MA0616E170320
ML
series
HANYOUNG NUX CO.,LTD.
28, Gilpa-ro 71 beon-gil, Nam-gu, Incheon, Korea
Tel : +82-32-876-4697 Fax : +82-32-876-4696 E-mail : overseas@hynux.com
 Loading...
Loading...