

Hamilton Sundstrand Company ACT2000 User Manual
ACT2000
Operations
Manual
ACT2000
All-Electric Actuator
SD-6008-03


This manual provides installation, maintenance, and operating instructions for the
ACT2000 All-Electric Actuator.
Every attempt has been made to provide sufficient information in this
manual for the proper operation and preventive maintenance of the
actuator. It is recommended that the user read this manual in its entirety.
Operating the ACT2000 All-Electric Actuator in accordance with instructions
herein ensures long term and reliable operation.
If additional information is required, please contact:
Marketing Department
Precision Engine Controls Corporation
11661 Sorrento Valley Road
San Diego, California 92121
(858) 792-3217 • (800) 200-4404
fax: (858) 792-3200
e-mail: peccntl@precisioneng.com
© 2000 PRECISION ENGINE CONTROLS CORPORATION. ALL RIGHTS RESERVED

ACT2000
II

ACT2000
Table of Contents
Table of Contents ........................................................................................................................................ i
1 INTRODUCTION............................................................................................................................. 1-1
1.1 Application .................................................................................................................................... 1-1
1.2 Mounting Provisions..................................................................................................................... 1-1
1.3 Main Housing Assembly ..............................................................................................................1-2
1.4 Brushless DC Motor Assembly....................................................................................................1-3
1.5 Motor Control Electronics............................................................................................................. 1-3
1.6 Resolver Assembly ...................................................................................................................... 1-3
1.7 Linear Drive Mechanism .............................................................................................................. 1-4
1.8 Power and Digital Harness ..........................................................................................................1-4
1.9 Identification Plate ........................................................................................................................1-5
2 FUNCTIONAL DESCRIPTION AND OPERATION....................................................................... 2-1
2.1 System Description ......................................................................................................................2-1
2.2 Electronic Description ..................................................................................................................2-1
2.3 Basic Operation and State Description ....................................................................................... 2-6
2.4 Health Monitoring .........................................................................................................................2-8
2.5 FAULT Alarm................................................................................................................................ 2-9
2.6 OVERTEMP Alarm ....................................................................................................................2-10
2.7 Automatic Shutdown .................................................................................................................. 2-10
2.8 ACT2000 Set-Up Parameters ...................................................................................................2-11
3 INSTALLATION............................................................................................................................... 3-1
3.1 Inspection...................................................................................................................................... 3-1
3.2 Environmental Considerations.....................................................................................................3-1
3.3 Mechanical Installation.................................................................................................................3-1
3.4 Electrical Installation.....................................................................................................................3-4
4 TROUBLESHOOTING.................................................................................................................... 4-1
5 DECOMMISSIONING AND DISPOSAL ........................................................................................ 5-1
6 ACT2000 GENERAL SPECIFICATIONS....................................................................................... 6-1
7 GLOSSARY..................................................................................................................................... 7-1
I
ACT2000
List of Figures
Figure 1-1: ACT2000 Pin Mounted....................................................................................1-1
Figure 1-2: ACT2000 Flange Mounted..............................................................................1-1
Figure 1-3: ACT2000 Cut-Away View ...............................................................................1-2
Figure 1-4: Typical Identification Plate...............................................................................1-5
Figure 2-2: Typical Power Connection ..............................................................................2-3
Figure 2-3: Typical Discrete Command Connection.........................................................2-3
Figure 2-4: Typical Analog Input Connection....................................................................2-4
Figure 2-5: Typical Analog Output Connection .................................................................2-4
Figure 2-6: Typical Fault Alarm Connection......................................................................2-5
Figure 2-7: ACT2000 State Machine.................................................................................2-7
Figure 3-1: ACT2000-590P Envelope ...............................................................................3-2
Figure 3-2: ACT2000-200F Envelope ...............................................................................3-3
Figure 3-3: ACT2000 Wiring Diagram ...............................................................................3-8
List of Tables
Table 2-1: ACT2000 Setup Parameters..........................................................................2-12
Table 3-1: Power Harness Recommended Wire Size......................................................3-5
Table 3-2: Digital Harness Recommended Wire Size......................................................3-6
Table 3-3: ACT2000 Power Harness Wire List.................................................................3-7
Table 3-4: ACT2000 Digital Harness Wire List .................................................................3-9
Table 3-5: Power Supply Requirements..........................................................................3-10
Table 4-1: ACT2000 Initial Installation Troubleshooting Chart.........................................4-2
Table 4-2: ACT2000 In-Service Troubleshooting Chart ...................................................4-3
Table 4-3: ACT2000 Electrical Hook-Up Continuity Troubleshooting Chart.….…...4-3
II

ACT2000
1 INTRODUCTION
This publication covers operation, installation and maintenance instructions for
the ACT2000 Actuators manufactured by Precision Engine Controls Corporation.
1.1 Application
The ACT2000 All-Electric Actuator is designed to meet general industrial motion
control requirements for high temperature hazardous locations. Typical
applications include gas turbine guide vane and valve motion control.
1.2 Mounting Provisions
The ACT2000 can be pin or flange mounted. Figure 1-1 shows a pin-mounted
actuator. Figure 1-2 shows a flange-mounted actuator. Other configurations can
be provided. Please consult Precision Engine Controls Corporation.
Figure 1-1 ACT2000-590P Pin Mounted Figure 1-2 ACT2000-200F Flange Mounted
The pin-mounted ACT2000 configuration includes a stainless steel machined
clevis. The clevis is fully rotational to allow variable angular indexing as required
for installation. The extension rod provides a female thread for user supplied end
attachments. A spherical rod end bearing attachment is preferred.
The ACT2000 contains a brushless direct current (DC) motor-driven linear
actuator with on-board digital motor control electronics. The primary actuator
components are described in the balance of this section.
1-1
ACT2000
r
gs
A
p
y
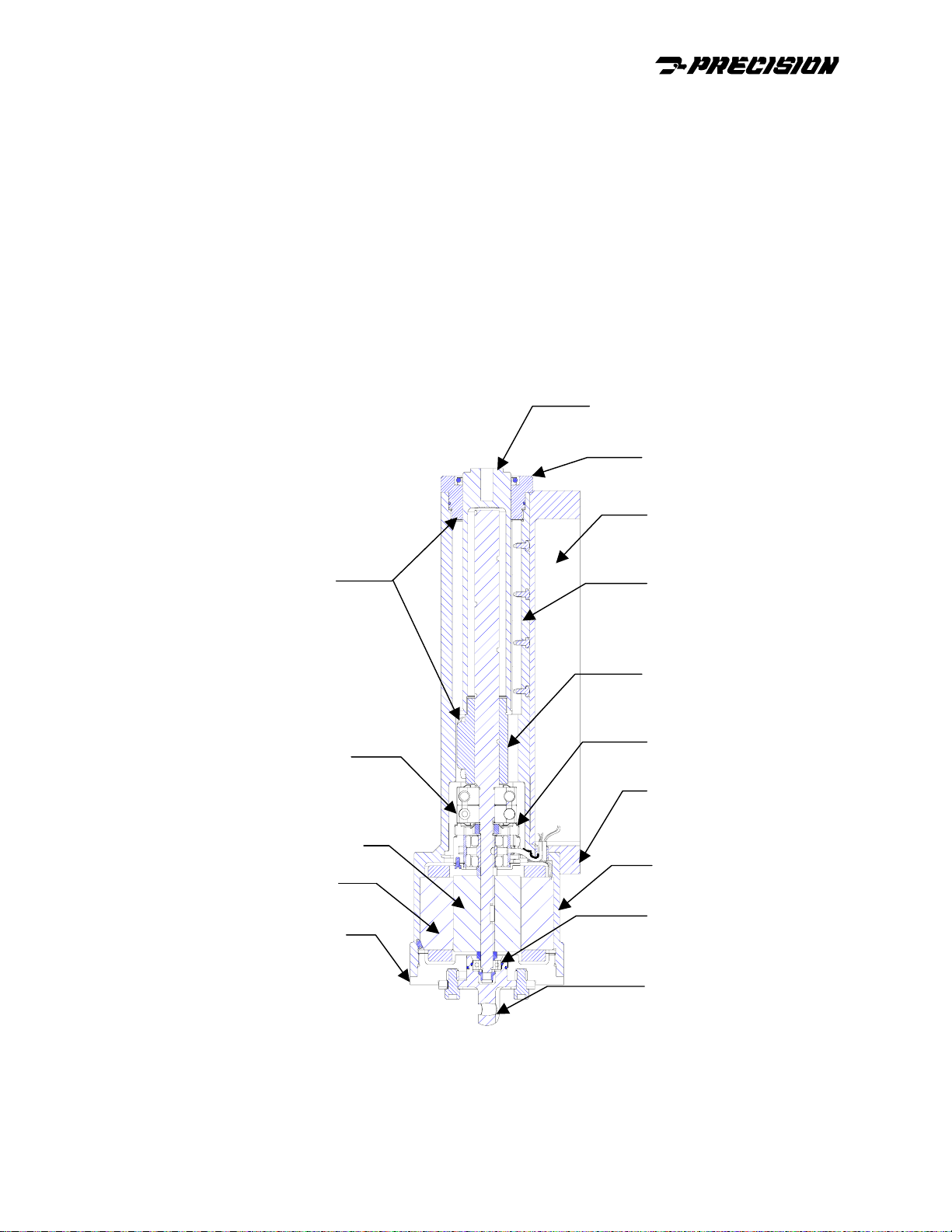
1.3 Main Housing Assembly
The main housing assembly contains a main housing, motor cover, extension rod
bearing, and associated seals. See Figure 1-3. The main housing assembly is the
primary structural system component and supports all the bearings, motor control
electronics, motor cover, and mountings, which forms the explosion-proof
containment.
In order to provide main bearing thermal dimensional stability, the housing is fitted
with a stainless steel liner. The liner is permanently installed into the aluminum
main housing. A retaining ring is included for redundant retention.
The main housing contains rigid mechanical stops to prevent extension rod
travel beyond the design specification.
Extension Shaft
Rod End Bearing
Motor Control
Electronics
Rigid Sto
nti Rotation Guide
Linear Drive
Main
Bearin
Resolver Assembly
Main Housing Assembl
Motor Rotor
Motor Stator
Brushless DC
Motor Assembly
Motor Cove
Motor End Bearing
Mounting Clevis
Figure 1-3 ACT2000 Cut-Away View
1-2

ACT2000
1.4 Brushless DC Motor Assembly
A brushless DC motor powers the ACT2000 linear drive mechanism. The DC
motor contains a stator and rotor. See Figure 1-3
Motor Stator
The motor stator is attached to the main housing by a pre-loaded wave spring
and screws. Thermistors are embedded in the stator windings to monitor winding
temperatures. The motor electrical power and thermistor wires pass from the
motor through a conduit into the electronics housing.
Motor Rotor
The motor rotor is locked to the ball screw shaft via a straight key. The motor rotor
contains powerful magnets that align with the energized stator windings thereby
creating torque and shaft rotation.
1.5 Motor Control Electronics
The motor control electronics (MCE) are contained within the main housing
electronics enclosure. The MCE includes harnesses, heat sink, digital and driver
component assemblies (CA).
The MCE electronics communicate with the user’s controller through analog and
serial interfaces. The MCE controls the brushless DC motor, to position the
actuator based on position feedback from the resolver.
Note: The digital board analog and discrete interfaces are electrically
isolated. The MCE serial interface is NOT electrically isolated.
1.6 Resolver Assembly
A Brushless, non-contacting resolver is the primary ACT2000 feedback sensor.
A sinusoidal feedback signal is provided from the resolver to the motor control
electronics. A sinusoidal signal from the MCE provides the resolver excitation.
The resolver includes a stator and rotor. See Figure 1-3
Resolver Stator
The resolver stator is clamped to the main housing between the main bearing
retaining nut and resolver retainer. The resolver stator angular position relative to
the rotor is adjustable. Electrical wires from the resolver are reeled in the resolver
adapter to allow rotation. The resolver wires, along with the motor and thermistor
leads, are routed through a conduit into the electronics housing.
Resolver Rotor
The resolver rotor is mounted by a key to a ball screw shaft. As the rotor rotates,
the stator transformer output signal provides shaft rotation information to the
MCE.
1-3

ACT2000
1.7 Linear Drive Mechanism
The Linear Drive Mechanism converts the rotary motion of the Motor Assembly to
linear actuator motion. The core of the mechanical drive system is the linear ball
screw drive containing a screw shaft, ball bearing fitted nut, extension rod and
main duplex thrust bearings.
Screw Shaft
The thrust bearings, motor rotor, motor end bearing, and resolver rotor are
mounted directly to the screw shaft. A ball bearing track is machined into the
screw shaft.
Ball Nut
As the screw shaft rotates, the ball nut translates in an axial direction depending
on shaft rotation.
Extension Rod and Bearings
The extension rod is threaded on the ball nut. As the ball nut translates, the
extension rod moves in and out of the ACT2000 main housing.
The extension rod support bearing is provided for lateral support. Thrust and
radial loads are transferred from the extension rod through the ball nut to the main
preloaded duplex thrust bearings. The thrust bearings transfer the loads to the
main housing by the main bearing and shaft retaining nuts.
A motor end bearing is provided for additional shaft radial stability. The resolver
rotor, motor rotor, motor bearing, and spacers are stacked on the ball screw shaft
and retained by a single nut. This arrangement prevents actuator axial loads from
passing through the resolver rotor and motor rotor.
1.8 Power and Digital Harness
A four-wire electrical harness with two (2) meter free leads provides the ACT2000
electrical power inputs. The four-wire harness allows for redundant electrical
inputs.
A seventeen-wire electrical harness with ninety (90) inch free leads provides
ACT2000 signal interface. Contained within this seventeen-wire harness are
discrete commands, analog commands, feedback, and serial interface wires.
1-4
ACT2000
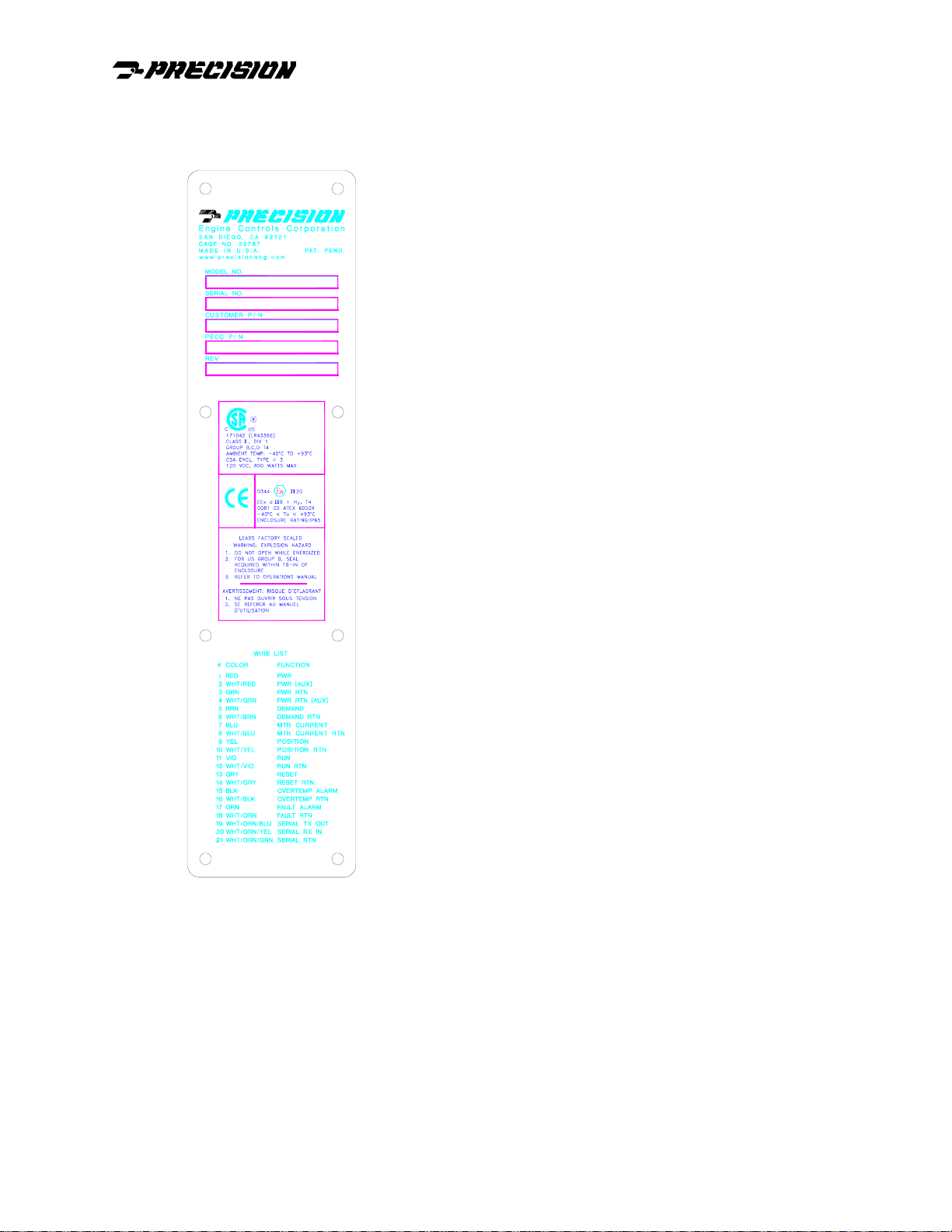
1.9 Identification Plate
A product identification plate is attached to the
actuator housing assembly. Figure 1-4 shows a
typical identification plate.
The identification plate lists model designation,
product part number, revision and unit serial
number. Hazardous area operation, certification
and electrical wiring interface information is also
provided.
Figure 1-4: Typical Identification Plate
1-5

ACT2000
NTENTIONALLY BLANK
I
1-6

ACT2000
2 FUNCTIONAL DESCRIPTION AND OPERATION
This section describes system functions employed in the ACT2000
Electric Actuator.
2.1 System Description
The ACT2000 is a closed loop servo system containing motor control electronics
(MCE) and a brushless DC motor driven ball screw actuator. The actuator closes
its own control loop on an internally generated position feedback. Thus, the
actuator continuously modulates its position and provides precise positioning.
The ACT2000 requires only 120VDC power, 4-20 mA position demand, and
discrete RUN command to achieve basic operational capability. The ACT2000
provides position and motor current feedback via integral 4-20 mA circuits. Once
120VDC power and RUN command are supplied, the actuator will track position
demand.
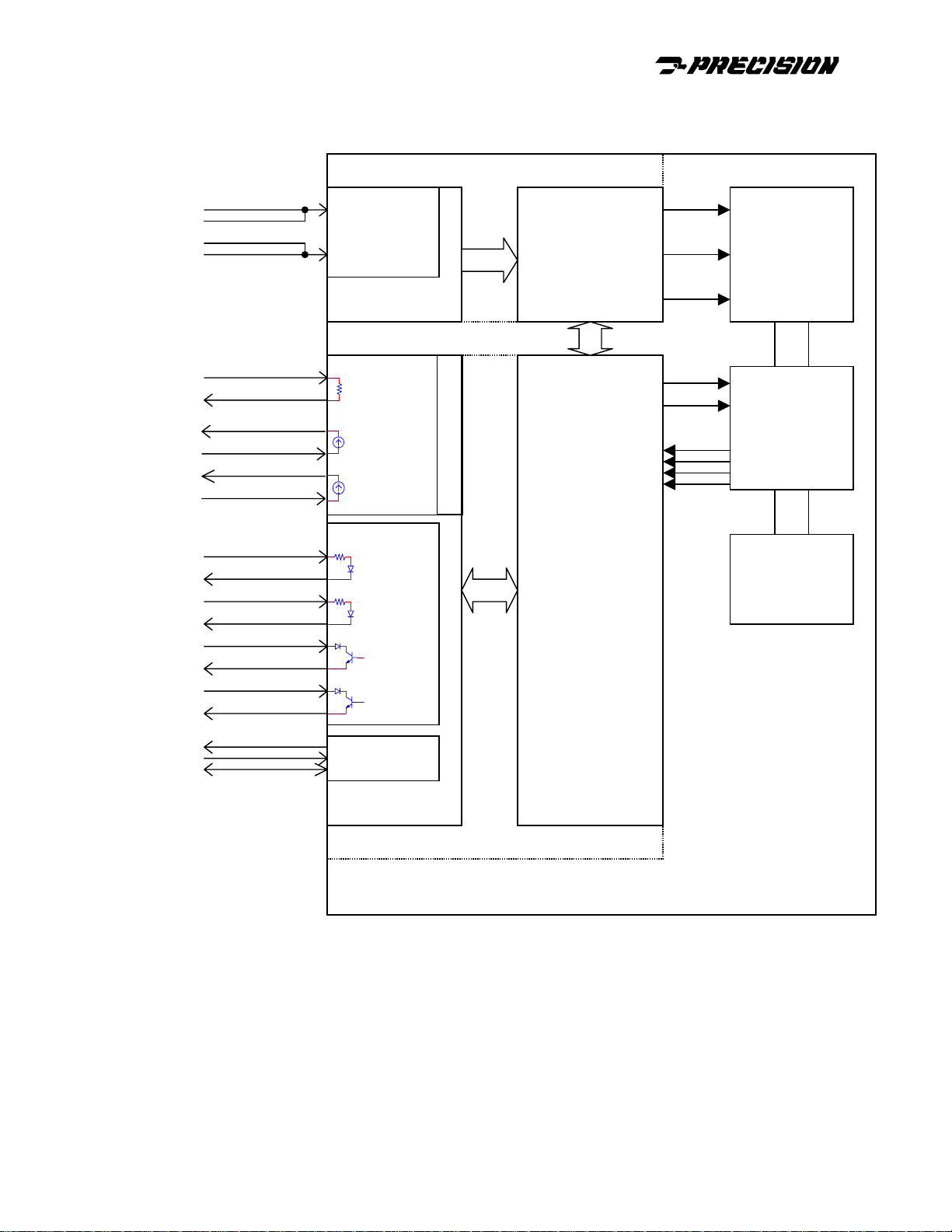
2.2 Electronic Description
The ACT2000 electric actuator incorporates digital motor control electronics. The
electronic system block diagram is shown in Figure 2-1. Contained within the
motor control electronics (MCE) are digital and driver CA. The digital and driver
component assemblies contain analog to digital converters, digital signal
processor (DSP), application specific integrated circuit (ASIC) and power
supplies.
Digital CA
The digital CA interfaces with a user-provided control system that is typically a
programmable logic controller (PLC). The digital CA accepts analog position and
discrete RUN and RESET commands from the control system. The digital CA
provides analog position and motor current feedback to the control system. In
addition, the digital CA provides discrete FAULT and OVERTEMP alarms to the
control system.
The digital CA receives position feedback from the resolver and current feedback
from the driver CA. The digital CA can provide speed, temperature, voltage and
other relevant information through the serial interface using ActWiz software.
Contact Precision Engine Controls for ActWiz software.
Note: The digital board analog and discrete interfaces are electrically
isolated. The RS232C serial interface is NOT electrically isolated.
Driver CA
The driver CA interfaces with the user’s power supply; typically a 120 VDC
battery. The driver CA controls current to the brushless DC motor and provides
precise voltage and current inputs to the digital CA.
2-1
ACT2000
DRIVER ASSY
120V
ACTUATOR
POWER
(80 - 160 VDC)
RED
WHITE/RED
+
GREEN
WHITE/GREEN
-
REVERSE
POLARITY
PROTECTION
POWER
INTERFACE
ELECTRONICS
POWER
BRUSHLESS
DC MOTOR
DEMAND
DEMAND RTN
POSITION
POSITION RTN
MTR CURRENT
MTR CURRENT RTN
OVERTEMP ALARM
RUN
RUN RTN
RESET
RESET RTN
FAULT ALARM
FAULT RTN
OVERTEMP RTN
SERIAL TX OUT
SERIAL RX IN
SERIAL RTN
BROWN
WHITE/BROWN
YELLOW
WHITE/YELLOW
BLUE
WHITE/BLUE
VIOLET
WHITE/VIOLET
GRAY
WHITE/GRAY
ORANGE
WHITE/ORANGE
BLACK
WHITE/BLACK
WHT/ORN/BLU
WHT/ORN/YEL
WHT/ORN/GRN
INPUT
TERMINATION
4-20mA
OUTPUT
OPTICAL
ISOLATION
RS-232 DRIVER
CONTROL
INTERFACE
DIGITAL ASSY
OPTICAL ISOLATION
ACTUATOR
CONTROL
ELECTRONICS
RESOLVER
BALL SCREW
AND
SHAFT
Figure 2-1: ACT2000 Electronics System Block Diagram
2-2
 Loading...
Loading...