

Page 1
Allgemeine Hinweise ......................................................... 4
Sicherheit .............................................................................. 4
Verwendete Symbole auf dem Gerät .................................. 4
Garantie ................................................................................ 4
Servicehinweise und Wartung ............................................. 4
Betriebsbedingungen............................................................ 4
Bedienungselemente HM8125 .......................................... 5
Lieferumfang ........................................................................ 5
Funktionsprinzip des HM8125 ............................................. 6
Inhaltsverzeichnis
GPS Frequency Standard
HM8125
Installation .......................................................................... 6
Allgemeines .......................................................................... 6
Erste Inbetriebnahme ........................................................... 6
Bedienung ........................................................................... 7
Lock Lost .............................................................................. 7
Menü-Struktur ...................................................................... 8
Beschreibung der Untermenüs ............................................8
Time ...................................................................................... 8
FREQ .................................................................................... 9
RECVR .................................................................................. 9
STAT .................................................................................... 10
Ergänzende Informationen zu den
in den Menüs verwendeten Daten .................................... 10
Gerätemeldungen ............................................................... 10
Aussendung der seriellen Schnittstelle.............................. 11
Bemerkungen zum DCF77-Kode........................................ 12
Verwendung von GPS-Empfängern zur
Frequenz- und Zeitbestimmung .................................... 13
Funktionsprinzip des GPS-Systems ................................... 13
Erreichbare Genauigkeit für
reine C/A-Code-Empfänger ................................................13
Erreichbare Genauigkeit für Empfänger ............................. 14
mit Trägerphasen-Messung................................................ 14
Kombinierte Auswertung ................................................... 14
von Code- und Trägerphase................................................ 14
Begrenzungen der nutzbaren Genauigkeit ......................... 15
Differenzmessungen (DGPS) ............................................. 15
DCF77 ................................................................................. 16
Zeitinformation und Normalfrequenz ................................. 16
Trägerfrequenz .................................................................... 16
Amplitudenmodulation (AM) ..............................................16
Codierung............................................................................ 16
Bedienungsanleitung
Operating Manual
................................ 21
Empfang der DCF77-Normalfrequenz ........................... 18
Printed in Germany ; Juni 1997
Page 2
KONFORMITÄTSERKLÄRUNG
DECLARATION OF CONFORMITY
DECLARATION DE CONFORMITE
Name und Adresse des Herstellers HAMEG GmbH
Manufacturer´s name and address Kelsterbacherstraße 15-19
Nom et adresse du fabricant D - 60528 Frankfurt
HAMEG S.a.r.l.
5, av de la République
F - 94800 Villejuif
Die HAMEG GmbH / HAMEG S.a.r.l bescheinigt die Konformität für das Produkt
The HAMEG GmbH / HAMEG S.a.r.l herewith declares conformity of the product
HAMEG GmbH / HAMEG S.a.r.l déclare la conformite du produit
®
Instruments
Bezeichnung / Product name / Designation:
Typ / Type / Type:
mit / with / avec:
Optionen / Options / Options:
mit den folgenden Bestimmungen / with applicable regulations / avec les directives suivantes
EMV Richtlinie 89/336/EWG ergänzt durch 91/263/EWG, 92/31/EWG
EMC Directive 89/336/EEC amended by 91/263/EWG, 92/31/EEC
Directive EMC 89/336/CEE amendée par 91/263/EWG, 92/31/CEE
Niederspannungsrichtlinie 73/23/EWG ergänzt durch 93/68/EWG
Low-Voltage Equipment Directive 73/23/EEC amended by 93/68/EEC
Directive des equipements basse tension 73/23/CEE amendée par 93/68/CEE
Angewendete harmonisierte Normen / Harmonized standards applied / Normes harmonisées utilisées
Sicherheit / Safety / Sécurité
EN 61010-1: 1993 / IEC (CEI) 1010-1: 1990 A 1: 1992 / VDE 0411: 1994
Überspannungskategorie / Overvoltage category / Catégorie de surtension: II
Verschmutzungsgrad / Degree of pollution / Degré de pollution: 2
Elektromagnetische Verträglichkeit / Electromagnetic compatibility / Compatibilité électromagnétique
GPS Zeit-/Frequenz-Normal/GPS Frequency Standard
HM8125
-
-
EN 50082-2: 1995 / VDE 0839 T82-2
ENV 50140: 1993 / IEC (CEI) 1004-4-3: 1995 / VDE 0847 T3
ENV 50141: 1993 / IEC (CEI) 1000-4-6 / VDE 0843 / 6
EN 61000-4-2: 1995 / IEC (CEI) 1000-4-2: 1995 / VDE 0847 T4-2: Prüfschärfe / Level / Niveau = 2
EN 61000-4-4: 1995 / IEC (CEI) 1000-4-4: 1995 / VDE 0847 T4-4: Prüfschärfe / Level / Niveau = 3
EN 50081-1: 1992 / EN 55011: 1991 / CISPR11: 1991 / VDE0875 T11: 1992
Gruppe / group / groupe = 1, Klasse / Class / Classe = B
Datum /Date /Date Unterschrift / Signature /Signatur
24.04.1996
Dr. J. Herzog
Technical Manager
Directeur Technique
2 DEUTSCH
Änderungen vorbehalten / Subject to change without notice
Page 3

HM 8125 GPS Zeit-/Frequenz-Normal
■ Hochgenaue Frequenzgenerierung
■ Genauigkeit bis zu 1x10
■ Kurzzeitstabilität 3x10
-12
-10
bei 2 Sek Integrationszeit
■ 1 PPS (Puls pro Sekunde) Ausgang
■ DCF-Signalgenerierung
■ Frequenzmessung für 10MHZ Signale mit 3x10
■ Präzise Zeit- und Positionsangaben
■ Weltweit einsetzbar ohne Geräteänderungen
■ RS-232 Schnittstelle serienmäßig
■ Niedrige Betriebskosten
-10
Der HM8125 ist ein Zeit- und Frequenznormal zur Gene-
rierung hochpräziser Zeitmarken und Frequenzen und zur Bereitstellung hochgenauer Positionierungsdaten. Die Genauigkeit basiert auf dem NAVSTAR Global Positioning System
(GPS). Das System besteht aus 24 Satelliten, deren Cäsium-Normale die erzielbare Genauigkeit garantieren.
Der HM8125 empfängt die Satellitensignale und errech-
net innerhalb einer Zeitspanne von 2 bis 15 Minuten nach
der Inbetriebnahme seine aktuelle Position. Die erfolgte Synchronisation kann durch entsprechende Nachrichten auf
einer 2x20 stelligen LCD überwacht werden. Genaue Positionsangaben können auf dem geräteeigenen LCD abgelesen werden.Die vom Gerät zur Verfügung gestellten Zeitmarken werden mit einer Präzision von ±100ns relativ zu
UTC dargestellt. Die generierten Frequenzen haben eine
Genauigkeit von ±1x10
-12
(24 Std.), wenn der HM8125 zu
den Satelliten synchronisiert ist. Zeit- und SynchronisationsDaten sind über die serielle Schnittstelle verfügbar und erlauben so den Einsatz des HM8125 in Kalibrier- oder
Überwachungseinrichtungen.
Zum Einsatz im Bereich Telekommunikation stellt der
HM8125 ein 2.048MHz Signal bereit, welches ebenfalls
GPS-synchronisiert ist. Darüber hinaus können externe Frequenzen (Ablage max. 70ppm) mit einer Genauigkeit von
bis zu ±3x10
-10
, gemessen werden. Der HM8125 ist in der
Lage (als Option), einen internen oder externen RubidiumOszillator zu disziplinieren.
Durch die Übertragung der notwendigen Informationen
via Satellit ist ein weltweiter Einsatz des Gerätes ohne Probleme möglich. Der HM8125 wird komplett mit Antenne,
Antennenkonverter und Kabel geliefert.
Änderungen vorbehalten 9/96
Spezifikationen
(Bezugstemperatur : 23°C ± 2°C)
Zeitmarken- und Frequenz-Generierung
Frequenz Ausgang: 10MHz, 2.048Mhz, 1kHz
Genauigkeit: ±3X10
Zeitmarken-Ausgang: 1 PPS (Puls pro Sekunde)
Genauigkeit: 100 ns bezogen auf UTC o. GPS-Zeit
Jitter: <5ns
Sonstige Ausgänge: DCF77
Positionsangaben: Breitengrad, Längengrad und Höhe
Genauigkeit: 100m; 150m für die Höhe
Frequenz-Messungen
Eingangsfrequenz: 10MHz ± 70ppm
Genauigkeit: ±3x10
Eingangsspannung: typisch 30mV - 1V
Sonstiges
Antenne: Doppelhelix; für Außenbetrieb
Abmessungen: ca. 4cm x 12cm
Frequenzumsetzung: Antennenkonverter; Umsetzung von
Abmessungen: ca. 3cm x 7cm x 17cm (Konverter)
Leistungsaufnahme: 110/220V ±15%; 45-60Hz, 45VA
Temperaturbereich: 0°C bis +40°C
Schnittstellen: RS232 Serienmäßig
Feuchte: 10%-90%, ohne Kondensation
Sicherheit: Schutzklasse 1, IEC 348
Gewicht: ca. 5kg
Abmessungen: 285mm x 85mm x 365mm (BxHxT)
-10
bei 2 Sekunden Meßzeit
-12
±1x10
(unter "Selective Availability"-Bedingungen)
±5m horizontal; ±10m vertikal
(gemittelt über 24 Std.)
±2x10-9 bei 0.2s. Meßzeit
1,57542GHz auf 10,23MHz
Kabellänge bis zu 25 m
(längere Kabel auf Anfrage)
bei 24 Std. Meßzeit
-10
bei 2s. Meßzeit
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 3
Page 4
Allgemeine Hinweise
Garantie
Nach dem Auspacken sollte das Gerät auf mechanische
Beschädigungen und lose Teile im Innern überprüft werden. Falls ein Transportschaden vorliegt, ist sofort der
Lieferant zu informieren. Das Gerät darf dann nicht in
Betrieb gesetzt werden.
Sicherheit
Dieses Gerät ist gemäß
bestimmungen für elektrische Meß-, Steuer-, Regelund Laborgeräte
in sicherheitstechnisch einwandfreiem Zustand verlassen. Es entspricht damit auch den Bestimmungen der
europäischen Norm EN 61010-1 bzw. der internationalen Norm IEC 1010-1.
Den Bestimmungen der Schutzklasse I entsprechend
sind alle Gehäuse- und Chassisteile mit dem Netzschutzleiter verbunden.
Das Auftrennen der Schutzkontaktverbindung innerhalb oder außerhalb der Einheit ist unzulässig.
Wenn anzunehmen ist, daß ein gefahrloser Betrieb nicht
mehr möglich ist, so ist das Gerät außer Betrieb zu setzen und gegen unabsichtlichen Betrieb zu sichern.
VDE 0411 Teil 1, Sicherheits-
, gebaut und geprüft und hat das Werk
Jedes Gerät durchläuft vor dem Verlassen der Produktion einen Qualitätstest mit etwa 24stündigem ,,Burn-in”.
Im intermittierenden Betrieb wird dabei fast jeder Frühausfall erkannt. Dennoch ist es möglich, daß ein Bauteil
erst nach längerem Betrieb ausfällt. Daher wird auf alle
HAMEG-Produkte eine Funktionsgarantie von 2 Jahren
gewährt. Voraussetzung ist, daß im Gerät keine Veränderungen vorgenommen wurden.
Für Versendungen per Post, Bahn oder Spedition wird
empfohlen, die Originalverpackung aufzubewahren.
Transportschäden sind vom Garantieanspruch ausgeschlossen.
Bei Beanstandungen sollte man am Gehäuse des Gerätes einen Zettel mit dem stichwortartig beschriebenen
Fehler anbringen. Wenn auf diesem auch der Name bzw.
die Telefonnummer des Absenders steht, dient dies der
beschleunigten Abwicklung.
Servicehinweise und Wartung
Verschiedene wichtige Eigenschaften der Meßgeräte sollten in gewissen Zeitabständen genau überprüft werden.
Dazu dienen die im Funktionstest und Abgleichplan des
Manuals gegebenen Hinweise.
Diese Annahme ist berechtigt,
• wenn das Gerät sichtbare Beschädigungen aufweist,
• wenn das Gerät lose Teile enthält,
• wenn das Gerät nicht mehr arbeitet,
• nach längerer Lagerung unter ungünstigen Verhältnissen (z.B. im Freien oder in feuchten Räumen).
Beim Öffnen oder Schließen des Gehäuses muß
das Gerät von allen Spannungsquellen getrennt
sein.
Wenn danach eine Messung oder ein Abgleich am geöffneten Gerät unter Spannung unvermeidlich ist, so darf dies
nur durch eine Fachkraft geschehen, die mit den damit verbundenen Gefahren vertraut ist.
Verwendete Symbole auf dem Gerät
Achtung - Bedienungsanleitung beachten
Vorsicht Hochspannung
Erdanschluß
Löst man die Schrauben am Gehäuse-Rückdeckel des
HM8125 kann der Gehäusemantel nach hinten abgezogen werden.
Beim späteren Schließen des Gerätes ist darauf zu achten, daß sich der Gehäusemantel an allen Seiten richtig
unter den Rand des Front- und Rückdeckels schiebt.
Betriebsbedingungen
Der zulässige Umgebungstemperaturbereich während
des Betriebes reicht von +10°C...+40°C. Während der
Lagerung oder des Transports darf die Temperatur zwischen -10°C und +70°C betragen. Hat sich während
des Transports oder der Lagerung Kondenswasser gebildet, muß das Gerät ca. 2 Stunden aklimatisiert werden, bevor es in Betrieb genommen wird.
Die Geräte sind zum Gebrauch in sauberen, trockenen
Räumen bestimmt. Sie dürfen nicht bei besonders großem Staub- bzw. Feuchtigkeitsgehalt der Luft, bei Explosionsgefahr sowie bei aggressiver chemischer Einwirkung betrieben werden.
Die Betriebslage ist beliebig. Eine ausreichende Luftzirkulation (Konvektionskühlung) ist jedoch zu gewährleisten. Bei Dauerbetrieb ist folglich eine horizontale oder
schräge Betriebslage (Aufstellbügel) zu bevorzugen.
4 DEUTSCH
Änderungen vorbehalten / Subject to change without notice
Page 5
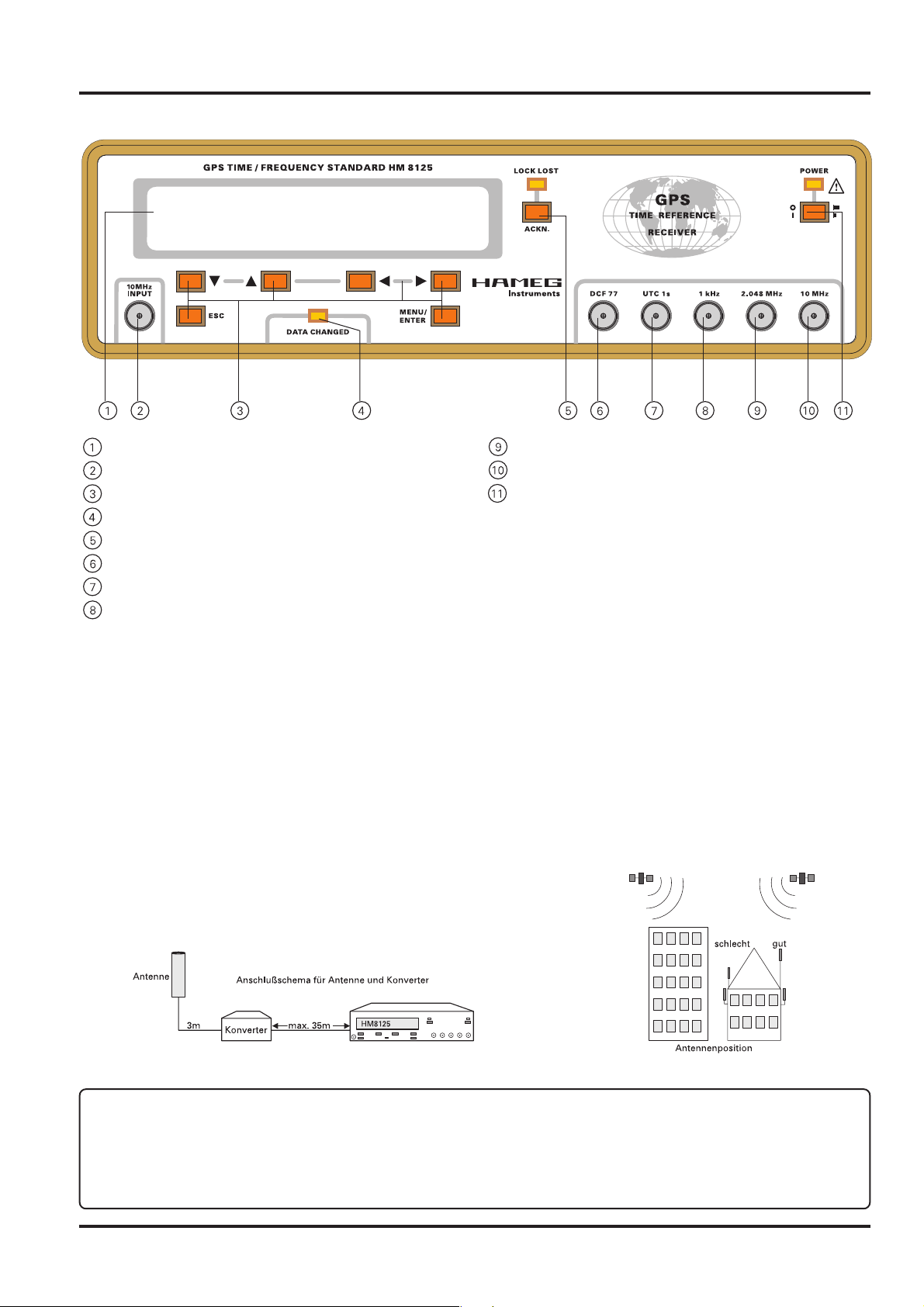
Bedienungselemente HM8125
LCD 2x20 Zeichen
Eingang für Frequenzmessungen
Tasten für Menüsteuerung
Data Changed-LED
"Locklost" LED und "Acknowledge"-Taste
DCF 77 Ausgang (1s Takt, Rechteck)
1PPS Ausgang (UTS oder GPS-zeit) Rechtecksignal
1kHz Ausgang (Rechtecksignal)
Lieferumfang
Die Inbetriebnahme des HM8125 erfordert die sorgfältige Installation der Antenne und den korrekten Anschluß des
mitgelieferten Antennenkonverters.
Zum Lieferumfang des HM8125 gehören folgende Teile
A ein Steuergerät HM8125
B ein Frequenzkonverter
C eine Antenne
D ein Anschlußkabel von Antenne zum Konverter (N- auf SMA-Verbinder), ca. 3m lang
E ein Adapterkabel (SMA auf BNC) zwischen Konverter und BNC-Kabel zum Steuergerät
F Manual, Netzkabel, Software für RS232-Schnittstelle
2,048MHz Ausgang Rechtecksignal
10MHz Ausgang Rechtecksignal
Netzschalter (+LED)
Geräterückseite
Netzanschluß, Spannungswähler und Sicherung
Antenneneingang
Locklost Relais-Ausgang
Funktionsprinzip des HM8125
Wichtiger Hinweis!
Das im Folgenden beschriebene Instrument ist ein elektrisches Gerät und darf als solches nur von
geschultem Personal bedient werden. Wartung und Reparatur dürfen ebenfalls nur von Fachleuten
vorgenommen werden.
Bei Korrespondenz bezüglich dieses Instrumentes bitte die Typennummer und die Seriennummer
auf dem Typenschild angeben.
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 5
Page 6
Der HM8125 ist ein Zeit- und Frequenznormal zur Generierung hochpräziser Zeitmarken und Frequenzen sowie
zur Bereitstellung hochgenauer Positionierungsdaten. Die
Genauigkeit basiert auf dem NAVSTAR Global Positioning
System (GPS), entwickelt und betrieben vom US Department of Defense. Das System besteht aus 24 Satelliten, deren Cäsium-Normale die erzielbare Genauigkeit
garantieren. Die Satellitensignale werden weltweit übertragen.
Aus den übertragenen Satellitensignalen errechnet der
HM8125 seinen aktuellen Standort. Sobald dieser gefunden ist, beginnt die Ankoppelung der internen Oszillatoren an die “Zeitbasis” des GPS-Systems.
Installation
Das Steuergerät HM8125 wird in einem (möglichst) konstant klimatisiertem Raum installiert und mit der
Netzspannungsversorgung verbunden. Das mitgelieferte BNC-BNC Kabel (Länge 15m) wird an den rückseitigen Antenneneingang am HM8125 angeschlossen. Die
Kabellänge zwischen HM8125 und dem Antennenkonverter kann bis zu max. 40m erweitert werden. In
Fällen, wo dies nicht ausreicht, ist bei Verwendung eines entsprechenden Vorverstärkers (Option) eine Kabellänge bis zu 200m möglich. Über eine BNC-Kupplung wird
das BNC-Kabel mit dem Adapterkabel (BNC auf SMA)
zum Antennenkonverter verbunden. Die Antenne wird
über das mitgelieferte N- auf SMA-Verbindungskabel an
den Konverter angeschlossen.
Die Installation der Antenne muß so erfolgen, daß in horizontaler Ebene ein Sichtbereich von ca. 180° ohne störende Bebauung gewährleistet ist. Nur so ist ein optimaler Betrieb des HM8125 gegeben. Die Antenne muß auf
jeden Fall senkrecht justiert werden und sollte möglichst
an einem Mast befestigt sein. Der Antennenkonverter wird
bedingt durch die Kabellänge in max. 3m Abstand von der
Antenne installiert. Die Stromversorgung geschieht über
das Verbindungskabel zum Steuergerät. Trotz witterungsbeständiger Kapselung sollte der Antennenkonverter nach
Möglichkeit innerhalb eines Gebäudes oder geschlossenen Raumes installiert werden.
Allgemeines
Im Allgemeinen sind bei optimaler Antennenaufstellung
ca. 7-8 Satelliten gleichzeitig “sichtbar”. Zur genauen
Positionsbestimmung werden vom HM8125 4 Satelliten
benötigt. Bei der Fertigung und anschließenden Überprüfung des HM8125 wird dem Gerät ein geodätischer
Ort mitgeteilt, an dem es sich zum Zeitpunkt der
Endprüfung befindet. Dieser Ort wird vom Gerät ebenfalls bei der Inbetriebnahme beim Kunden vermutet. Dies
ist jedoch in der Regel auch nicht annähernd der Fall.
Daher kann es bei der Erstinstallation beim Kunden bis
zu 30 min. dauern, bis das Gerät seinen neuen geodätischen Ort gefunden hat. Diese Zeit ist stark davon ab-
hängig, wie gut die “Sicht” auf die Satelliten ist. Das Verfahren läßt sich durch Eingabe von annähernd korrekten
Positionskoordinaten verkürzen (±5°), wenn diese zum
Zeitpunkt der Inbetriebnahme bekannt sind.
Erste Inbetriebnahme
Die folgenden Hinweise sind gedacht um den HM 8125
möglichst schnell in Betrieb nehmen zu können. Dabei
wird davon ausgegangen, daß Antenne und Konverter
sowie die Verkabelung korrekt installiert sind.
Beim Burn-in in der Fabrik wird der HM 8125 mit einem
geographischem Ort programmiert, welcher der Position
der Fertigungsstätte entspricht. Dieser ist im Allgemeinen verschieden von dem Ort, an dem das Gerät anschließend in Betrieb genommen wird. Um eine möglichst
schnelle Einstellung des Gerätes auf seinen neuen geographischen Ort vorzunehmen, wird der programmierte
Ort (Initial Position) durch den neuen aktuellen Ort ersetzt.
Dazu sollte die geographische Lage des Ortes der Inbetriebnahme auf einige Grad genau bekannt sein. Eine Toleranz von 5 Grad wird ohne Probleme vom Gerät akzeptiert.
Beim Einschalten des HM 8125 erscheint das Hauptmenü.
HM8125 GPS STANDARD
TIME FREQ RECVR STAT
Hieraus wird das “RECEIVER”-Menü mit der darunter
liegenden Taste aktiviert.
RECEIVER:
TRACK USE POS
Anschließend erhält man über “USE” die folgende Meldung:
USE entered position
(using inital pos)
Da das Gerät zur Ermittelung und anschließenden
Mittelung der aktuellen Position mindestens 4 Satelliten
benötigt, sollte man zur ersten Inbetriebnahme eine Position vorgeben. Dazu wird 2mal die Taste
Der HM 8125 zeigt dann folgende Meldung:
USE averag’d position
(using inital pos)
Diese Meldung muß noch mit “Enter” bestätigt werden.
USE entered position
(not yet verified!)
betätigt.
6 DEUTSCH
Änderungen vorbehalten / Subject to change without notice
Page 7

Die folgende Meldung bestätigt diese Eingabe.
Dieses Menü kann nun über “ESC” verlassen werden.
Im “ RECEIVER” - Menü, welches jetzt wieder erscheint
wird nun über die Taste “POS” eine neue Anzeige aufgerufen:
Standort Frankfurt/M
Die oben dargestellte Meldung erhält man nach 2maligem Drücken der Taste
.
Mittels der “Links/Rechts” -Tasten wird der Cursor unter die zu ändernde Ziffer gestellt und diese dann mittels
geändert. Auf diese Weise wird Ziffer um Ziffer
den aktuellen Verhältnissen entsprechend geändert. Ist
die aktuelle Position eingegeben, so ist der Vorgang mit
“Enter” abzuschließen. Bei richtiger Installation der Antenne sollte der HM 8125 jetzt innerhalb weniger Minuten seine Position finden.
Sobald der HM8125 am jeweiligen Einsatzort konfiguriert ist, beschränkt sich die Bedienung meist auf die Überwachung der ordnungsgemäßen Funktion. Eine mitgelieferte Software ermöglicht die Überwachung des Gerätes mittels der eingebauten RS232-Schnittstelle.
Bedienung
Zur Bedienung des HM8125 stehen verschiedene über
ein einfach zu bedienendes Menü zugängliche Befehle zur
Verfügung. Alle Befehle sind in verschiedene Menü-Ebenen eingebettet, welche sich auf einfache Weise über die
4 Cursortasten (
lassen. Die 4 Pfeiltasten wählen, falls ein Menü angezeigt
wird, den darüberstehenden Menü-Eintrag. Die vier Hauptmenü-Einträge bezeichnen Untermenüs, deren Einträge
auf Funktionen, Anzeigen etc.führen. Eingaben oder Daten, die geändert werden können oder sollen, werden
mittels eines Cursors unterstrichen und können dann in
der jeweiligen Position geändert werden.
Nach dem Einschalten erscheint das Hauptmenü; die
Lock-Lost-LED blinkt. Sie wird dann, wenn alle (internen)
Oszillatoren gerastet sind (Lock ok), permanent leuchten und kann nur in dieser Betriebsart durch Drücken
der ACKN-Taste zurückgesetzt werden.
left/right up/down ) erreichen
Solange im Hauptmenü die MENU/ENTER-Taste gedrückt
gehalten wird, werden Kontrast- und Beleuchtungs-Stärke angezeigt. Änderungen sind mit den Pfeiltasten (bei
gedrückter MENU/ENTER-Taste) möglich.
SET contrast = 5
backlight = 3
Die LCD Hintergrundbeleuchtung “Backlight” läßt sich
in 3 Stufen einstellen. Der Kontrast ist prinzipiell in 7 Stufen einstellbar, von denen im praktischen Betrieb der
Bereich Stufe 4 bis 7 nutzbar ist. Änderungen wie z.B.
Helligkeit und Kontrast werden unmittelbar wirksam.
Andere Eingaben, die den Betrieb des Empfängers und/
oder einen Signal-Ausgang betreffen, werden zunächst
nur in einem Puffer abgelegt, aber noch nicht gleich wirksam. Es leuchtet dann die ‘Data Changed’ LED.
Falls ‘Data Changed’ nicht leuchtet, führt die MENU/
ENTER-Taste immer ins Hauptmenü zurück, die ESC-
Taste führt nur um jeweils einen Schritt im Menü zurück.
Falls die "Data Changed" LED leuchtet, werden mit
MENU/ENTER die geänderten (und in dem Moment angezeigten) Daten übernommen. Mit “ESC“ werden sie
verworfen und wieder die ursprünglichen Daten angezeigt.
In beiden Fällen erlischt die LED und das Menü wird nicht
verlassen (erst bei erneutem Drücken von MENU/ENTER
oder ESC)!
Einige Angaben (z.B. in USE oder TRACK) stellen zunächst nur eine Aufforderung dar bzw. zeigen den aktuellen Zustand an. Es werden dann entsprechende Kommentare oder Warnungen ausgegeben.
Lock Lost
Falls der HM8125 “annimmt”, eines der Ausgangssignale
(DCF77, 1pps, 10MHz, 2.048MHz, 1kHz) sei unsicher
(Grenze dafür sind 50ns Zeit- bzw. 5x10
des 10MHz-Oszillators), so blinkt die "Lock Lost" LED.
-10
Frequenzfehler
Beim Einschalten lassen sich durch gleichzeitiges Drükken verschiedener Tasten bestimmte Anfangszustände
vorgeben. Einschalten, während “
“ und “ “ gedrückt
sind, löscht bzw. initialisiert den gesamten Speicher.
“ alleine löscht nur den Almanach;“ “alleine nur
“
die Ephemeriden.
Solange im Hauptmenü die ESC-Taste gedrückt gehalten wird, wird die Versions-Bezeichnung der Software
und evtl. später auch eine von der Software erkannte
Hardware-Option (Rubidium) angezeigt.
Änderungen vorbehalten / Subject to change without notice
Dies ist auch der Fall bei der Erstinstallation oder falls im
normalen Betrieb durch “ungünstige Sicht” z.B. bei atmosphärischen Störungen oder Bebauung, mehrere Satelliten “verloren” gehen.
“Lock Lost”
bedeutet nicht,
daß die generierten Frequenzen nicht mehr erzeugt werden, sondern heißt nur, daß die normalerweise erzielte
Präzision zu diesem Zeitpunkt nicht gewährleistet ist. Im
Allgemeinen ist dieser Zustand nur kurzfristig. Die Rückkehr zum Normalbetrieb geschieht in aller Regel kurzfristig. Nach Wiederherstellung der “Rastung” leuchtet die
DEUTSCH 7
Page 8

“Lock Lost“ LED weiterhin und muß explizit durch Drükken der “ACKN“-Taste zurückgesetzt werden. Dadurch
bleibt auch nach erfolgter Wiederherstellung der Rastung
ein Hinweis auf einen “Satellitenverlust”.
Auf der Rückseite des Gerätes befindet sich eine BNCBuchse die mit einem Ralaiskontakt gekoppelt ist. Der
Relaiskontakt ist geöffnet bei korrekter Ankoppelung des
HM8125 an das Satellitensignal. Bei Verlust der Rastung
- auch kurzfristig - wird der Kontakt geschlossen.
Im ausgeschalteten Zustand (HM8125) ist der Relaiskontakt ebenfalls geschlossen, was auch einer Lock-Lost
Meldung entspricht.
nition immer in UTC; alle anderen Angaben beschreiben die Lokalzeit, für die neben UTC+Offset auch die
GPS-Zeit gewählt werden kann.
1996-JUN-11 07:06
50254 TUE UTC-2h S
Solange kein Satellit empfangen wird (erkennbar am
Fehlen der Sekunden), ist dies ein Editor zum Einstellen der Zeit, die hier als Lokalzeit formuliert ist, aus der
aber der Empfänger intern die GPS-Zeit rekonstruieren muß. Zeit & Zone müssen daher zueinander passend angegeben werden.
Solange die “ACKN“-Taste gedrückt gehalten wird, ist
(auch bei gelöschter LED) in der oberen Zeile das letzte
Ereignis benannt, das für den Lock-Zustand von Bedeutung war . Es kann, muß aber nicht zum Lock-Verlust
geführt haben. In der unteren Zeile wird der aktuelle LockZustand benannt. Bei Loslassen der Taste erscheint wieder die alte Anzeige.
Diverse Bereichsüberschreitungen im Empfänger, die bei
interner Selbstüberprüfung festgestellt werden können,
liefern Warnungen mit einem knappen Text. Diese Warnungen können nur durch die ESC-Taste gelöscht werden. Das drücken irgendeiner anderen Taste hat keine
Wirkung und es erscheint die Anzeige, die vor der Warnung dargestellt war.
Menü-Struktur
Hauptmenü Untermenüs
TIME LOCAL DST UTC 1PPS
FREQ QLTY MEAS
RECVR TRACK USE POS
STAT ORBIT ACC LIST LOCK
Die Untermenüs sind über die Cursor-Tasten erreichbar.
Das Verlassen eines Untermenüs geschieht durch die
ESC oder MENU-Taste. In den meisten Untermenüs sind
Änderungen und Eingaben möglich.
Nachdem der Empfänger (vom 1. Satelliten) die Zeit
bestimmt hat (erkennbar an laufenden Sekunden), ist
nur noch die Zeitzone änderbar, für die die Lokalzeit
angezeigt wird. Die intern verwendete (GPS-)Zeit kann
dann nicht mehr beeinflußt werden.
MJD, Wochentag und Sommer/Winterzeit können
nicht eingestellt werden, sondern ergeben sich stets
aus den übrigen Angaben.
DST (Daylight Saving Time)
Achtung!
Änderungen der aktuellen Zeitzone im LOCAL
Mode (die je nach DST-Parametern und Datum als
die Sommer- oder Winter-Zeitzone (SZ-Zone - 1h)
interpretiert wird) hat Auswirkungen auch auf
DST.
UTC-2h: last Sun Mar
until Last Sun Sep
Beginn und Ende sind frei wählbar. Es werden die
Wochenenden, an denen die Sommerzeit beginnt und
endet, sowie den Offset der Sommerzeit zu UTC
benant. Als Winterzeit-Offset wird stets (SommerzeitOffset - 1h) verwendet.
Beschreibung der Untermenüs
Time
TIME:
LOCAL DST UTC 1PPS
LOCAL
Datum (J.M.D) Zeit (STD/MIN/SEK)
MJD Wtg UTC Zone S z.B. ‘Sommerzeit’-Indikator
(‘Saving time’)
MJD=Modifiziertes Julianisches Datum. Ist per Defi-
8 DEUTSCH
Achtung!
Änderungen hier können zur Änderung der in
LOCAL verwendeten Zeitzone und der Zeit-Darstellung im DCF77-Takt führen.
UTC
UTC=GPS-(11s + 49ns)
+ 2ns/d
UTC=GPS-(LS+Stand) +Gang
Hier erfolgt die Anzeige der Relation von
GPS-Time ←→ UTC(USNO).
Änderungen vorbehalten / Subject to change without notice
Page 9

LS=Zahl der Schaltsekunden (‘Leap Seconds’)
Stand=Abstand von Sekundenmarken(GPS) und
Sekundenmarken(UTC);
Gang=zeitliche Änderung des Standes (1ns/d ~ 1
-14
).
‘ppm’ oder ‘ppb’) für die Messung.
Meßbereich: 10MHz ± 70ppm (~0,7kHz)
Extra Meldung (untere Zeile) bei nicht gelockten
10MHz oder bei fehlendem Eingangs-Signal.
Falls die Daten nicht bekannt sind, stehen überall ‘?’.
Daten die aus dem gepufferten Speicher stammen,
werden im Display mit Sat ‘old data’ angezeigt.
1PPS
1PPS: UTC delayed
by 000000000 ns
(Status)
Skala+Delay
Die ”Skala” kann UTC oder GPS sein. Beide unterscheiden sich nur um wenige ns (angezeigt in UTC).
Der an der Buchse ausgegebene 1pps kann gegenüber der angegebenen Skala um ±0,5s verschoben
werden; die Auflösung ist 1ns. Änderungen führen
im Allgemeinen zu vorübergehendem Lock-Verlust,
da der Referenz-Oszillator auf die neue Phase ‘geschoben’ werden oder zumindest der 1pps-Teiler neu
synchronisiert werden muß (dies wird in der oberen
Zeile des Displays angedeutet).
FREQ
RECVR
TRACK
TRACK all in view: 8
chang’d:0/8 sats used
TRACK all w/o SA: 0
chang’d:0/8 sats used
Auswahl des/der Satelliten, die verfolgt und ausge wertet werden sollen:
all in view - alle sichtbaren /erkennbaren Satelliten
(wird beim Einschalten automatisch eingestellt),
all w/o SA - alle SA-freien (SA-Selective Availability)
In der unteren Zeile erfolgt die Anzeige, wieviele (von
gemäß Zeit, Ort und Auswahlkriterium zu erwartenden) Satelliten verfolgt werden.
USE
FREQUENCY:
QLTY MEAS
QLTY
QLTY: δ t= ? ns
δf/f= ? E-10
δt = ...ns
δf = ...E-10
Ist die Anzeige des Regelfehlers : Der Abweichungen
von Zeit und Frequenz der (z.B. SA-gestörten Satelliten)
scheinbaren GPS-Zeit (oder deren Umrechnung auf
UTC), auf die der 10MHz-Oszillator geregelt werden soll.
MEAS (Meßeingangsfunktion)
MEAS: gate= 2s
-- unlocked --
gate=..
10MHz + ...ppm
USE entered position
(not yet verified!)
Dieser Modus wird beim Einschalten mit ‘initial’ POS
initialisiert.
USE erlaubt die Auswahl der zu benutzenden OrtsVariante. Ausgehend von deren Koordinaten werden
Tracking-Vorhersagen berechnet. Der Wunsch, es
möge ein unplausibler Ort verwendet werden, (z.B.
eine fehlerhaft eingegebenen ‘entered’ oder eine von
früher ‘übriggebliebene’ initial’ POS) wird mit einer
Warnung abgelehnt und der HM8125 verwendet den
Ort, der nach seiner internen Kenntnis der bisher zuverlässigste ist.
POS
Ist die Anzeige der verschiedenen Positions-Varian-
ten (Lat, Lon, Höhe über NN und Höhe über Geoid).
(Die Auswahl, welche Variante zu benutzen ist, erfolgt im Menü USE).
-9
Die Wahl der Auflösung ( 1X10
Darstellung (‘MHz’ oder Abweichung von 10MHz in
Änderungen vorbehalten / Subject to change without notice
oder 1X10
-10
und der
Beim Einschalten werden alle Varianten mit dem Ort
initialisiert, der zuletzt verwendet wurde unabhängig
DEUTSCH 9
Page 10

davon, welche Variante (initial, entered, averaged)
das war.
LOCK
Nur die ‘entered’ Position ist in diesem Menü änder-
bar. Falls noch kein Ort berechnet werden konnte,
werden Änderungen auch in die ‘updated’ und
‘averaged’ Position übertragen.
Die Mittelung der ‘averaged’ POS arbeitet unabhängig.
Der Ausgangspunkt für Rechnungen (Vorhersage der
zu erwartenden Meßergebnisse und Berechnung von
Korrekturen aus deren Abweichung von den tatsächlichen Meßergebnissen) ist jeweils der in USE zur
Benutzung gewählte Ort.
STAT
STATUS:
ORBIT ACC LIST LOCK
ORBIT
Sat01 E1= 1° Az=225°
3 SN= ? URA = ?
Angezeigt werden:
Die Nummer des Satelliten und seine Elevation, der
Azimut, die Rauschleistung, S/N (Signal/Rausch-Verhältnis) und URA (User Range Accuary).
ACC
ACC: SA=off,0/6 sats
POS=entered
LOCK: 10.00=?? (int)
10.23=?? 2.048=??
Dient zur Schnellübersicht über den Zustand der diversen internen Regelkreise. ’10.00 bad’ und/oder
’10.23 bad’ bedeutet das interne Referenzoszillatoren
nicht gerastet werden können. (Abgleich Fehler)
‘2.048 bad’ schließt zwar das Relais und läst die LED
blinken, den GPS-Betrieb aber stört das nicht.
Ergänzende Informationen zu den
in den Menüs verwendeten Daten
Daten, die im gepufferten RAM gehalten werden und beim
(Wieder)-Einschalten des Gerätes benutzt werden,können
durch Einschalten bei gedrückter
bzw. auf Default-Werte gesetzt werden):
MENUE/ENTER: Kontrast/Beleuchtung
LOCAL: Uhrzeit/Datum und Zeitzone
DST: Zone, erster und letzter Tag
1PPS: Delay und Zeitskala (GPS oder UTC)
UTC: Zahl der Schaltsekunden sowie Stand/Gang
MEAS: Gate-Zeit und Darstellung
USE /POS: Koordinaten des zuletzt verwendete Ortes
Daten, die beim Einschalten (un)abhängig von früheren
Einstellungen initialisiert werden:
LOCAL: Datum/Uhrzeit werden der laufenden Uhr
entnommen
TRACK: ’all in view’ suchen/verfolgen
POS/USE: alle Varianten werden mit den in dem
gepufferten Speicher entnommenen Koordinaten initialisiert
USE: "initial" Position wird verwendet
und -Taste gelöscht
Ist die Angabe über die verwendeten Satelliten
(SA, Anzahl, Position)
LIST
LIST: 0220312-2----0
001000202112000-0-
Diese Aufstellung aller vorhandenen Satelliten zeigt
für jeden Satelliten einen Charakter, der als ASCIIHEX-Darstellung von 4 Bit zu interpretieren ist:
LSBIT=Bit0=1: Satelliten ist ok und über dem Horizont.
Elevation >10°
(unter 10° wird maskiert)
Bit1=1: Bahndaten bekannt
Bit2=1: alle Info für "lock" bekannt
Bit3=1: Sat ist bekannt und "gelockt"
Blank: keine neuen Erkenntnisse mangels "Lock"
10 DEUTSCH
Automatisch werden vom HM8125 regelmäßig aufgefrischt:
• die Liste der verfügbaren Satelliten, SA-Aktivierung
• die Bahndaten
(grob - ‘Almanach’ und fein - ‘Ephemeriden)
die Relation UTC ↔ GPS
•
(Schaltsekunden, Stand, Gang)
• die ‘updated’ und ‘averaged’ POS: Länge/Breite/Höhe
Stand/Gang des (10.23MHz-)Oszillators
Gerätemeldungen
Die "Warning" Meldung kann nur mit der ESC-Taste gelöscht werden. Sie muß so lange gedrückt werden bis
das ursprüngliche "MENUE" erreicht ist.
WARNING: noise low →
check antenna cable
Änderungen vorbehalten / Subject to change without notice
Page 11

WARNING: can’t find
any satellites
position changed:
for a 1st satellite
Diese Meldungen erscheinen bei einem Lock-Verlust oder
bei Betätigung der "ACKN" -Taste.
FEHLER MÖGLICHKEITEN
gepufferte Daten verloren werden neu erstellt
zu wenig Signal Antennenkabel/Konverter?
zu großer Offset am ADC abhängig von LOCAL und
findet keine Satelliten POS/USE
findet nicht genug abhängig von POS/USE
Satelliten
UTC ↔ GPS: Daten zu alt! Verlassen des POS-Editors
bei veränderten Koordinaten
Xtal offset large? Pos. noch unbekannt;
check pos.!
Xtal offset large? Pos. ist bekannt;
adjust Ctrim Quarzfehler ist wirklich
zu groß; 10,00 und/oder
10,23 nachstellen
can't find any satellites Installation uberprüfen
Notfalls Service
can't find enough sat. aber mindestens einen
buffered memory/ EPROM wurde gewechselt
clock lost
chosen sats lost (bei TRACK w/o SA bei
all in view Untergang des letzten Sat'n)
ohne SA
osc. control
voltage large adjust 10MHz nachstellen
UTC vs. GPS: EPROM wurde gewechselt
data too old!
entered pos is not Bei Benutzung der entered
verified! position mit weniger als 4
Satelliten
pos. bad! bei unbekanntem Ort-2 oder
proper pos. unknown mehr inkosistente Satelliten
gemessen
Lock-Lost-Meldungen bei gedrückter ACKN.-Taste
‘position changed: sear- d.h. noch alles
ching for a 1st satellite’ unbekannt
‘wait: searching for d.h. mind. Uhrzeit
more satellites’ bekannt
’pos. found! searching
for more satellites’
‘Lock proc. started d.h. Lock-Versuch hat
(re)approaching Lock’ begonnen
‘Lock proc. started:’
‘-- locked --’ nach Änderungen in 1PPS
‘UTC vs. GPS changed’ nach Lesen relevanter
Satelliten-Daten
‘position changed’
’10.00MHz Lock lost’ z.B. durch plötzlichen
(re)approaching Lock Temperaturwechsel
’10MHz Lock lost’ Oszillator eingeregelt
‘-- locked --’
‘2.048MHz Lock lost’ meistens: 8.192MHz(re)approaching Code Oszillator falsch justiert
‘2.048MHz Lock lost’ Oszillator eingeregelt
‘-- locked --’
Es sind weitere Meldungen möglich, die jedoch für den
Normalbetrieb keine weitere Bedeutung haben.
ADC offset large Hardware-Fehler
needs service Vorgegebene Position nicht
pos bad using plausibel (...=initial/enterde/
downed sat. found
Noise low, check pos.
check antenna cable
nach Änderungen in POS/USE
averaged)
Gerät vermutet falsche Position
Antenneninstallation uberprüfen
Aussendung der seriellen Schnittstelle
Zur Protokollierung der ordnungsgemäßen Anbindung des
HM8125 an das GPS System besitzt das Gerät eine serielle Schnittstelle. Hardwaremäßig ist sie als 9polige SubD Buchse (female) ausgeführt. Als Verbindung zum protokollierenden Rechner dient ein Standard RS232-Kabel.
(RX/TX, RTS u. CTS sind 1:1 verbunden).
Die serielle Schnittstelle sendet alle 30min. und bei jedem Wechsel im Lockstatus die Informationen Datum
und Zeit sowie Angaben über die zwischen den einzelnen Meßintervallen aufgetretenen Abweichungen. Die
mitgelieferte Software GPS-PRO2.EXE ermöglicht die
Einstellung der Schnittstellendaten. Defaultmäßig ist im
HM8125 eine Datenübertragungsrate von 9600 Baud eingestellt. Diese läßt sich intern durch umstecken zweier
Steckverbindung ändern.
Die Software für die Protokollierung der GPS-Daten des
HM8125 befindet sich auf einer Diskette im Lieferumfang des Gerätes.
Die Installation erfolgt durch einfaches Kopieren auf die
Festplatte. Das Programm kann aber ebenso von der Diskette gestartet werden. Es empfiehlt sich auf jeden Fall
eine Sicherungskopie.
Das Programm wird durch Eingabe des Filenamens
GPS_PRO2.EXE
der seriellen Schnittstelle z.B. COM2 und die Eingabe
der Baudrate, z.B. 9600 (default), erfolgen. Die
GPS_READ.ME2
gestartet. Es muß dann die Eingabe
Datei gibt einige weitere Hinweise.
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 11
Page 12

Das Programm gibt alle 30min. und bei einer Störung die relevanten Daten des Gerätezustandes aus. Zur Beginn des Programmes kann die erste Meldung bis zu 30 Minuten dauern.
Das Protokoll sieht wie folgt aus:
$PUTC,96-03-08,12:11:04,1,+5E-10,-6E-10,+1E-10,+1ns,-1ns,+0ns
Bemerkungen zum DCF77-Kode
Die DCF77-Sekundenmarken sind genau wie der 1pps,
also im Sat-Mix typ. +/-50ns. Die Pulslänge von nominell
100ms oder 200ms ist nicht ganz so präzise. Sie stimmt
auf etwa +/- 550 µs.
$PUTC gibt an, daß es sich bei der angegebenen Zeit um
die UTC-Zeit handelt. Datum und Zeit werden dementsprechend angegeben und entsprechen nicht immer der Localtime. Die folgende Ziffer bedeutet bei "1", daß das Gerät
sich in gelocktem Zustand befindet. Eine "0" kennzeichnet
den nicht gelockten Zustand und eine "2" bedeutet, daß
der 10MHz Oszillator gelockt ist, intern aber ein anderer
Oszillator nicht im gerastetet Zustand schwingt. Das 10MHz
Ausgangssignal ist jedoch trozdem stabil.
Die folgenden Angaben bedeuten:
+5E-10 Maximalwert der positiven Frequenzab-
weichung seit der letzten Aussendung
-6E-10 Maximalwert der negativen Frequenzabweichung seit der letzten Aussendung
1E-10 Varianz der Frequenzabweichung seit der letz-
ten Aussendung
+1ns Maximalwert der positiven Zeitabweichung seit
der letzten Aussendung
-1ns Maximalwert der negativen Zeitabweichung
seit der letzten Aussendung
0ns Varianz der Zeitabweichung seit der letzten Aus-
sendung
Diese Sekundenmarken werden durch die Delay-Wahl im
Menü PPS auch genauso in ihrer zeitlichen Lage verschoben wie der 1pps. Die Länge der DCF-Pulse wird dabei
passend zu derjenigen (UTC-)Sekunde erzeugt, zu der die
ausgegebene Sekundenmarke verfrüht oder verspätet ist.
Im Extremfall bedeutet das, daß zwei Empfänger, deren
einer auf +0.5s und deren anderer auf -0.5s Delay gestellt ist, zwar (bis auf minimale Gleichlaufschwankungen)
gleichzeitig ihre 1pps- und DCF-Sekundenmarken erzeugen werden, daß ihre gleichzeitig beginnenden DCF-Pulse aber verschieden lang sind.
Der Empfänger mit +0.5s Delay wird stets diejenige Pulslänge ausgeben, die der andere Empfänger (mit -0.5s
Delay) eine Sekunde zuvor ausgegeben hat. Beide Kodes beschreiben tatsächlich die(selbe) UTC-Sekunde, die
genau in der Mitte zwischen den beiden jeweils gleich
langen Pulsen liegt. Nur beschreibt der eine Empfänger
jede Sekunde mit einer halben Sekunde Verspätung, die
der andere bereits eine halbe Sekunde im Voraus bezeichnet hatte.
12 DEUTSCH
Änderungen vorbehalten / Subject to change without notice
Page 13

Verwendung von GPS-Empfängern zur
Frequenz- und Zeitbestimmung
GPS-Empfänger sind zwar erheblich komplexere Geräte
als andere Zeitzeichen-Empfänger, sie werden in absehbarer Zeit kaum noch teurer sein als bislang auf Quarzoder Rubidium-Oszillatoren basierende Referenznormale,
da die vielseitige Verwendbarkeit der GPS-Empfänger
künftig eine preiswerte Großserienproduktion der eigentlichen GPS-Empfangseinheit ermöglicht. Der folgende
Abschnitt beschreibt Unterschiede zwischen verschiedenen Empfängerkonzepten, insbesondere die Vorteile der
Trägerphasen-Messung (wie im HM8125 verwendet) für
die schnelle Erkennung und Ausregelung von
Frequenzschwankungen.
Funktionsprinzip des GPS-Systems
Das “Global Positioning System” (GPS) ist ein satellitengestütztes Navigationssystem, welches neben einer
Ortsbestimmung auch eine sehr genaue Zeitbestimmung
sowie das genaue Messen bzw. Erzeugen von NormalFrequenzen ermöglicht. Das Navigationsverfahren beruht
auf einer Bestimmung der Abstände des Empfängers zu
verschiedenen Satelliten. Dazu werden die Laufzeiten der
von diesen Satelliten abgestrahlten Signale gemessen.
Aus ihnen lassen sich dann unter Verwendung der Bahndaten der Satelliten der Empfangsort sowie der Stand
der Empfängeruhr bestimmen. Entsprechend läßt sich
aus den Änderungsraten der Laufzeiten die Geschwindigkeit des Empfängers sowie der Gang der Empfängeruhr bestimmen. Die Bereitstellung der für die Rechnungen benötigten Daten ist Aufgabe einer Reihe von Bodenstationen. Diese ermitteln aus ihren Laufzeit-Messungen die Bahndaten sowie andere Werte und senden
sie auf einem Telemetriekanal an die Satelliten, die sie
dann wiederum an die Empfänger senden. Für eine dreidimensionale Positionsbestimmung benötigt man die
Laufzeiten von vier verschiedenen Satelliten: drei zur
Bestimmung der gesuchten Ortskoordinaten und einen
vierten zur Bestimmung des zunächst unbekannten
Standort der Empfängeruhr. Für einen reinen Zeit-Empfänger, der an einem bekannten Ort steht, reicht dagegen im Prinzip schon der Empfang eines einzelnen Satelliten aus. Der Empfang mehrerer Satelliten ermöglicht
aber eine deutliche Erhöhung der Zuverlässigkeit durch
Konsistenzprüfungen. Da ständig mindestens fünf Satelliten über dem Horizont sind, ist für die Zeitbestimmung
ein hohes Maß an Redundanz gegeben. Ferner kann man
durch Mittelung über die Meßergebnisse von mehreren
Satelliten den Einfluß der “Selective Availability” (s.u.)
mindern. Die genannten Laufzeitmessungen werden in
einem Korrelationsverfahren durchgeführt: Der vom Satelliten abgestrahlte Träger (1.575GHz) ist mit einem für
den jeweiligen Satelliten charakteristischen PseudoRausch-Code vom 1023 Bit Länge und, 1ms Dauer moduliert. Der Anfang dieser Code-Sequenz fällt mit der
ganzen Millisekunde der Satellitenuhr zusammen. Durch
Korrelation des Antennensignals mit einem im Empfän-
ger erzeugten gleichartigen Code läßt sich die Code-Phase bei Ankunft des Signals an der Antenne bestimmen.
Die verbleibende Unsicherheit über die ganze Zahl der
Millisekunden für die Laufzeit wird durch die Auswertung des 50-Baud-Datenstroms aufgehoben.
Erreichbare Genauigkeit für
reine C/A-Code-Empfänger
Die Korrelationsfunktion ist ein Dreieck mit einer Breite
von etwa 1µs. Außerhalb dieses Dreiecks verschwindet
das Korrelationssignal. Bei einem typischen Signal/RauschVerhältnis läßt sich die Mitte des Dreiecks in 1s auf etwa
10ns, also 1% der Breite auflösen. Abbildung 1 zeigt dazu
eine Meßreihe (gepunktete Kurve), in der die Differenz
zwischen der nach den Bahndaten erwarteten und der
vom Empfänger gemessenen Laufzeit dargestellt ist. Diese
Differenz ist gerade der Wert, den der Empfänger für den
Stand seiner Uhr gegenüber der GPS-Systemzeit ermittelt. Tatsächlich war die Empfängeruhr auf eine Atomuhr
synchronisiert, so daß der Gang zunächst Null war. Dieser wurde dann definiert um etwa 12x10
aufhin der Stand stetig anwuchs, bis der Gang nach etwa
20s wieder zurückgesetzt wurde.
Für eine Frequenzbestimmung aus zwei aufeinanderfolgenden unabhängigen Messungen der Code-Phase mit
1s Abstand erreicht man damit eine Genauigkeit von 10
Dies ist zugleich die Genauigkeit, mit der ein reiner C/ACodeEmpfänger einen Oszillator in 1s auf seine Nennfrequenz regeln kann.
Abb. 1 Gemessener Stand der Empfängeruhr gegenüber
der GPS-Systemzeit. C/A-Code ⋅⋅⋅⋅⋅; Code gemittelt ---;
mit Trägerphase ——
Da die erreichbare Genauigkeit durch das Empfangs-Rauschen begrenzt ist, läßt sie sich durch Mittelung über
mehrere Messungen natürlich verbessern. Das Ergebnis einer Mittelung des Standes über 10Sekunden ist in
Abbildung 1 als gestrichelte Linie eingezeichnet.Der Nachteil jeder Mittelung ist, daß plötzliche Änderungen im
Signalverlauf nur mit einer Verzögerung entsprechend der
Mittelungszeit festgestellt werden können. Diesen Ef-
-9
geändert, wor-
-8
.
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 13
Page 14

fekt erkennt man besonders gut in Abbildung 2, wo die
zeitliche Ableitung des gemittelten Standes, also der
gemessene Gang, gezeigt wird.
Breite des Korrelations-Peaks von 1µs - erreicht man theoretisch bei gleichen Meßzeiten eine Auflösung, die um
den Faktor 10.000 höher ist als beim C/A-Code.
Die Kurve zeigt die Antwort eines reinen C/A-Code-Empfängers auf einen Frequenzsprung: statt eine plözlichen Frequenzänderung registriert der Empfänger
eine langsam anwachsende Frequenz, die wegen der
Kürze der eingeprägten Frequenzexkursion bereits
wieder abnimmt, bevor der richtige Wert erreicht wird.
Mit einem solchen GPS-Empfänger kann man also lediglich Oszillatoren ‘disziplinieren’, die bereits eine recht gute
Stabilität haben.
Abb. 2
der GPS-Systemzeit. Code gemittelt
——
gemessener Gang der Empfängeruhr gegenüber
---
; mit Trägerphase
Erreichbare Genauigkeit für Empfänger
mit Trägerphasen-Messung
Abbildung 3 veranschaulicht schematisch den Unterschied der beiden Meßmethoden. Das Korrelationsdreieck (dicke Linie) hat die Steigung 1/µs, sodaß eine
Verschiebung des Signals infolge des Rauschens um beispielsweise 1% der Amplitude zu einer scheinbaren Verschiebung der Code-Phase um 10ns führt.
Die Korrelationsfunktion des Trägers, ist eine von
diesem Dreieck eingehüllter Sinus. Daher führt dieselbe Änderung des Signals hier nur zu einer scheinbaren Verschiebung der Trägerphase um 1ps !
Die erheblich größere Steilheit des Trägerphasen-Verlaufs
ermöglicht praktisch fehlerlose Frequenzmessungen innerhalb sehr kurzer Zeiten. Damit kann ein GPS Empfänger innerhalb von Bruchteilen einer Sekunde Frequenzen mit einer relativen Unsicherheit, zum Oszillator, von
-11
±1x10
2 zeigt den aus der Trägerphasen-Messung gewonnenen Gang der Empfängeruhr. Die Kurve gibt in praktisch
idealer Weise den oben beschriebenen Frequenz-Sprung
wieder.
messen. Die durchgezogene Linie in Abbildung
Kombinierte Auswertung
von Code- und Trägerphase
Messungen der Trägerphase allein sind nicht geeignet,
die Laufzeit des Signals zu bestimmen, da sich verschiedene Perioden der Trägers in nichts unterscheiden. Hierfür muß in der Regel der aufmodulierte Code verwendet
werden (eine Ausnahme bilden u.U. spezielle
differenzielle Verfahren für geodätische Empfänger). Aus
Messungen der Trägerphase kann man aber sehr genau
die Änderung der Laufzeit bestimmen, sodaß man eine
einmal bestimmte Laufzeit durch integrieren der Trägerphase fortschreiben kann. Eine geeignete Kombination
aus Code- und Träger-Phasenmessung vereint die
Absolut-Information des C/A-Codes mit der erheblich genaueren Relativ-Information aus dem Trägerphasen-Fortschritt. In der Praxis bedeutet das, daß man
durch die gemeinsame Auswertung der Code- und der
Trägerphase die Laufzeiten glätten kann, ohne eine Zeitverzögerung hinnehmen zu müssen.
Abb. 3 Schematische Darstellung von Code- und TrägerKorrelation
Genauso wie bei DCF77 kann man auch bei einem GPSEmpfänger die Meßgenauigkeit dadurch erheblich erhöhen, daß man neben dem aufmodulierten Code auch die
Trägerphase mißt. Aus der hohen Frequenz des Trägers
resultiert eine sehr geringe Empfindlichkeit der Phasenzeitmessung gegenüber Rauschen und Störsignalen. Bei
einer Periodendauer von etwa 635ps - gegenüber einer
14 DEUTSCH
In Abbildung 1 zeigt die durchgezogene Kurve den Stand
der Empfängeruhr, wie er nach diesem kombinierten Meßverfahren bestimmt wurde. Das Rauschen ist im Vergleich
zur reinen Code-Messung (gepunktete Linie) verschwindend gering. Gleichzeitig treten weder Verrundung noch
Verzögerung auf, wie sie für die zur Verringerung des Rauschens gemittelten Daten (gestrichelte Linie) charakteristisch sind. Die Präzision eines Meß- oder übertragungsverfahrens läßt sich ganz ähnlich wie die Stabilität eines Oszillators durch Angabe der AllanVarianz charakterisieren. Abbildung 4 zeigt die erreichte
Änderungen vorbehalten / Subject to change without notice
Page 15

Frequenzstabilität als Funktion der Mittelungszeit für etwas unterschiedliche Verhältnisse (Signal/ Rausch-Verhältnis S/N und Dauer der Einzelmessung). Tatsächlich
werden in dem Empfänger einmal pro Sekunde unabhängige Trägerfrequenzmessungen mit einer
Beobachtungsdauer zwischen 80ms und 640ms durchgeführt. Über diese Meßergebnisse kann dann gemittelt
werden. Die Kurven fallen in etwa mit einer Steigung
von -1/2 ab; demnach handelt sich bei dem begrenzenden Effekt um Rauschen und nicht um systematische
Fehler. Bei dieser nicht optimierten Auswertung des
Trägersignals kann der Empfänger mehrere Satelliten
quasigleichzeitig messen und parallel auswerten. Die bei
optimaler Auswertung erzielbare Kurzzeitstabilität ist im
Diagramm gepunktet als ‘kohärent’ eingetragen.
tet. Diese zum Zwecke der ‘Selective Availability’ (SA)
eingeführten Störungen führen zu einer Unsicherheit von
etwa 100ns bei der Standmessung und von etwa ±1x10
9
bei der Gangmessung. Eine Eliminierung dieser Fehler
ist nur mittels geheimer Verfahren möglich.
Welche der Satelliten durch Aktivierung der SA wann
gestört sein werden, ist nicht vorhersagbar. Allerdings
ist die Aktivierung der SA an den Bahndaten erkennbar.
Nur noch vier der insgesamt zur Zeit 24 Satelliten stammen aus einer alten Generation, die eine Modulation des
Uhrenganges noch nicht ermöglichte. Sie liefern daher
Meßwerte mit voller Genauigkeit. Die in den Abbildungen 1, 2 und 4 gezeigten Daten wurden mit ungestörten
Satelliten aufgenommen.
Eine andere Quelle für Ungenauigkeiten ist der Einfluß
der Ionosphäre auf die Signalausbreitung. Es gibt zwar
Modelle, die diesen Einfluß zu beschreiben versuchen,
ihre Anwendung kann aber die Fehler nicht vollständig
beseitigen.
Differenzmessungen (DGPS)
Weder die durch SA noch die durch die Ionosphäre erzeugten Fehler können in einem normalen Empfänger
beseitigt werden. Sind höhere Genauigkeiten für die Zeit
und/oder die Frequenzmessung nötig, so ist ein differentieller (DGPS-) Betrieb nützlich:
-
Abb.4 —— Kurzzeitstabilität (Standardabweichung) verschiedener Trägerfrequenz-Messungen. Spezifikation einer Cäsium-Atomuhr (HP 5061A) zum Vergleich –––; erwartete Meßauflösung bei kohärenter Auswertung ⋅⋅⋅⋅⋅⋅
Zum Vergleich sind als weitere Kurve gestrichelt die Daten für eine CäsiumAtomuhr eingezeichnet. Der Verlauf
der Kurven zeigt, daß ein Trägerphasen messender GPSPräzisionsempfänger eine Atomuhr nicht nur ‘disziplinieren’, sondern schlicht ersetzen kann.
Diese hohe Genauigkeit kann ein reiner C/A-Code-Empfänger auch mit vielen parallelen Kanäle wie sie heute in
den meisten Geräten verwendet werden nicht erreichen.
Für einen Empfänger, der die Trägerphase messen
kann, reicht es dagegen völlig aus, wenn er mit nur einem Kanal die verschiedenen Satelliten im Zeitmultiplex
verfolgt.
Begrenzungen der nutzbaren Genauigkeit
Die hohe Genauigkeit in der Signalauswertung liefert zur
Zeit nur eine entsprechend große Absolutgenauigkeit
bei Vermessung einiger weniger bestimmter Satelliten,
da die Betreiber des GPS die den zivilen Nutzern zugänglichen Signale und Daten der meisten Satelliten
künstlich verschlechtern. Dazu wird offensichtlich
der Lauf der Satellitenuhren moduliert. Möglicherweise
werden auch kleine Fehler in die Bahndaten eingearbei-
Ein Empfänger wird an einem bekannten Ort an eine sehr
genaue Uhr angeschlossen (beispielsweise an die Atomuhr der PTB) und mißt die momentanen Uhrenfehler aller empfangenen Satelliten. GPS-Empfänger, die diese
Meßergebnisse über Funk, Telefon o.ä. übermittelt bekommen, können diese dann in der Auswertung ihrer
Empfangsdaten als Korrekturen berücksichtigen. Das
Differentialverfahren beseitigt alle Fehler, die am Ort des
Referenzempfängers und am Ort des nutzenden Empfängers gleich sind. Die Verbreitung der Korrekturdaten
könnte vielleicht einmal ein Dienst der PTB sein, so wie
diese heute die Zeit über DCF77 verbreitet.
Welchen Nutzen solch ein Dienstes bringen würde, zeigt
ein erstes Experiment, das in der PTB mit zwei Empfängern durchgeführt wurde. Abbildung 5 zeigt Messungen
an einem Satelliten mit eingeschalteter SA von zwei unabhängig voneinander arbeitenden Empfängern. Die beiden äußeren Kurven zeigen die von den beiden Empfängern ermittelten Uhrenstände, an denen man deutlich
die Wirkung der SA erkennt. Die mittlere Kurve zeigt (in
vergrößerten Maßstab) die Differenz zwischen den CodePhasenmessungen der beiden Empfänger. Der verbleibende Fehler ist erheblich kleiner als der der beiden
Einzelmessungen. Es ist zu erkennen, daß es sich dabei
nicht um weißes Rauschen handelt.
Vermutlich resultiert der Restfehler aus lokal begrenzten
Reflexionen, die für verschiedene Antennenpositionen
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 15
Page 16

unterschiedlich sind. Durch sorgfältige Wahl des Antennenstandortes lassen sich diese Störungen möglicherweise etwas reduzieren.
Viel kleinere Differenzen erhält man, wenn man die
Trägerphasen-Messungen hinzunimmt, da sich Reflexionsbeimischungen genauso wie Rauschen auf die Trägerphasen-Messungen weniger auswirken als auf die CodePhasenmessungen. Für den überwiegenden Teil der
Meßzeit ist der verbleibende Restfehler kleiner als 3ns,
der größte Fehler beträgt 10ns. Auch hier zeigt sich also
die Überlegenheit der kombinierten Code- und TrägerPhasenauswertung, innerhalb kurzer Meßzeiten hohe Genauigkeit zu liefern.
Abb. 5 oben/unten: Stände zweier unabhängiger Empfänger. Mitte: Differenz der Stände (4-fach vergrößert)
Code gemittelt ---; mit Trägerphase ——
Autor: Dr. W. Klische
16 DEUTSCH
Änderungen vorbehalten / Subject to change without notice
Page 17

DCF77
Zeitinformation und Normalfrequenz
(7 Bits für die Minute, 6 Bits für die Stunde und 22 Bits für
das Datum einschließlich der Nummer des Wochentages) .
Aufgrund seiner zentralen geographischen Lage bei Frankfurt am Main und seiner Reichweite bis etwa 2000km
ermöglicht der Zeitsignal und Normalfrequenzsender
DCF77 in weiten Teilen Europas den Betrieb von Funkuhren. Mit seiner von Atomuhren abgeleiteten Trägerfrequenz können Normalfrequenzoszillatoren kalibriert oder
automatisch nachgesteuert werden. Der HM8125 erzeugt
ein Signal welches die gleiche Codierung wie DCF77
aufweist, aber auf Grund der Abhängigkeit vom GPS
System nicht die Positionierungsprobleme des DCF aufweist und außerdem weltweit verfügbar ist. Im folgenden wird die Funktionsweise des DCF77 beschrieben.
Trägerfrequenz
Die Trägerfrequenz von DCF77 ist eine Normalfrequenz
von 77,5kHz. Sie wird von Atomuhren der PTB abgeleitet
und weicht am Sendeort im Mittel über einen Tag weniger als 1X10
-12
(im Mittel über 100 Tage ≤ 2X10
-13
) von
dem durch die primären Atomuhren der PTB vorgegebenen Sollwert ab. Die Phasenzeit des Trägers wird
näherungsweise in Übereinstimmung «[0,3]ps mit UTC
(PTB) gehalten. Am Empfangsort beobachtete größere
Phasen- bzw. Frequenzschwankungen sind ausbreitungsbedingt.
Mit den AM-Sekundenmarken 1 bis 14 werden gelegentlich Betriebsinformationen über die Steuereinrichtung
übertragen, die nur für die für den Betrieb Verantwortlichen, aber nicht für die DCF77-Nutzer bestimmt sind.
Verlängerte Sekundenmarken in diesem Bereich bedeuten nicht, daß die ausgestrahlte Zeitinformation fehlerhaft ist.
Amplitudenmodulation (AM)
Der Träger wird mit Sekundenmarken amplitudenmoduliert: Zu Beginn jeder Sekunde (mit Ausnahme der
59. Sekunde, jeder Minute) wird die Trägeramplitude für
die Dauer von 0,1s oder 0,2s auf etwa 25% abgesenkt.
Durch das Fehlen der 59. Sekundenmarke wird die
nächstfolgende Minutenmarke angekündigt. Die unterschiedliche Dauer der Sekundenmarken dient zur binären Codierung von Uhrzeit und Datum, wobei Sekundenmarken mit einer Dauer von 0,1s der binären Null und
solche mit einer Dauer von 0,2s der binären Eins entsprechen.
Codierung
Einmal während jeder Minute werden Minute, Stunde,
Tag, Wochentag, Monat und Jahr BCD-codiert übertragen, bei AM durch Impulsdauermodulation der Sekundenmarken und bei der BPSK durch Invertieren der Pseudozufallsfolge . Abgesehen von der unterschiedlichen
Minutenmarkenkennung und der Reservierung der ersten
14 AM-Sekundenmarken für die gelegentliche Aussendung
von Betriebsdaten ist ab der 15. Sekundenmarke die durch
AM übertragene Binärinformation die gleiche wie die durch
BPSK. Das übertragene “Telegramm” gilt jeweils für die
folgende Minute. Die Zuordnung der einzelnen Sekundenmarken auf die übertragene Zeitinformation und zeigt das
Codierschema, in Bild 6. Die drei Prüfbits P1, P2 und P3
ergänzen jeweils die vorhergehenden Informationswörter
Bild 6 Schema der codierten Zeitinformation im DCF77.
Dieses Signal wird vom 8125 erzeugt.
M Minutenmarke
R Antennenbit
A1 Ankündingungsbit für den Übertragung von MEZ
nach MESZ oder von MESZ nach MEZ
Z1,Z2 Zeitzonen bits
A2 Ankündigungsbits für eine Schaltsekunde
S Startbit der codierten zeitinformation
P1, P2, P3 Prüfbits
Am Zustand des Antennenbits R (Nr.15) läßt sich erkennen, ob die Aussendung über die Betriebsantenne (Zustand Null) oder die Reserveantenne (Zustand Eins) erfolgt. Der Zweck des Antennenbits ist es, auf Phasenzeitsprünge des DCF77-Trägers hinzuweisen, die durch
den Wechsel der Sendeantenne verursacht werden und
zu einer Vergrößerung der Unsicherheit nachgesteuerter
Normalfrequenzgeneratoren führen können. Von der PTB
wird zwar dafür gesorgt, daß die abgestrahlte Trägerphasenzeit an beiden Antennen gleich ist, da beide Antennen aber etwa 1150 m voneinander entfernt sind, treten wegen der geänderten Laufzeiten zum Empfangsort
nach einem Wechsel der Sendeantennen Phasenzeitsprünge bis zu etwa ±4µs auf. Mit Hilfe von R wird es
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 17
Page 18

somit empfangsseitig möglich, den für jeden Empfangsort typischen Phasenzeitsprung im Empfänger durch geeignete Maßnahmen auszugleichen.
Die Zonenzeitbits Z1 und Z2 (Nr. 17 und 18) zeigen an,
auf welches Zeitsystem sich die ausgesandte Zeitinformation bezieht. Bei der Aussendung von MEZ hat
Z1 den Zustand Null und Z2 den Zustand Eins. Bei der
Aussendung von MESZ ist es umgekehrt.
Das Ankündigungsbit A1 (Nr. 16) weist auf einen bevorstehenden Wechsel des Zeitsystems hin. Vor dem Übergang von MEZ nach MESZ oder zurück wird A1 jeweils
eine Stunde lang im Zustand Eins ausgesendet. Mit dem
Ankündigungsbit A2 (Nr. 19) wird auf das bevorstehende Einfügen einer Schaltsekunde aufmerksam gemacht.
A2 wird ebenfalls eine Stunde lang vor dem Einfügen
einer Schaltsekunde im Zustand Eins ausgestrahlt.
Schaltsekunden werden nach Empfehlungen des Internationalen Erdrotationsdienstes in Paris weltweit zum
gleichen Zeitpunkt in die Koordinierte Weltzeitskala UTC
eingefügt, vorzugsweise am Ende der letzten Stunde des
31. Dezember oder des 30. Juni. Dies bedeutet, daß
Schaltsekunden in der Gesetzlichen Zeit der Bundesrepublik Deutschland eine Sekunde vor 1 Uhr MEZ am 1.
Januar oder vor 2 Uhr MESZ am 1. Juli eingeschoben
werden. Vor dem Einfügen einer Schaltsekunde am 1.
Januar ( 1. Juli) wird A2 daher sechzigmal von 00.00.19
Uhr MEZ (0 1.00. 19 Uhr MESZ) bis 00. 5 9.19 Uhr MEZ
(01.59.19 Uhr MESZ) im Zustand Eins ausgesendet.
Die Ankündigungsbits A1 und A2 dienen dazu, Prozessoren in Funkuhren, die von der Gesetzmäßigkeit der
Zeitzählung zum Zweck der Fehlererkennung Gebrauch
machen, über die Unregelmäßigkeiten in der Zeitzählung
zu informieren. Ohne A1 oder A2 würde die geänderte
Zeitzählung nicht sogleich zur Kenntnis genommen und
zur Anzeige gebracht werden, sondern zunächst als fehlerhafter Empfang interpretiert.
Das Einfügen einer Schaltsekunde geschieht bei den
AM-Sekundenmarken in folgender Weise: Die der Marke 01.00.00 Uhr MEZ bzw. 02.00.00 Uhr MESZ vorhergehende 59. Sekundenmarke wird mit einer Dauer von
0,1 s ausgesendet, und anstelle der normalerweise unterdrückten 59. Sekundenmarke (keine Trägerabsenkung)
wird die eingefügte 60. Sekundenmarke ohne Trägerabsenkung ausgestrahlt. Bei der BPSK erscheinen die 10
investierten Rauschfolgen zur Minutenmarkenidentifizierung um 1s später. Die Notwendigkeit, Schaltsekunden auslassen zu müssen, ist bei der gegenwärtigen Drehgeschwindigkeit der Erde nicht zu erwarten.
Oszillatorsignal und dem empfangenen DCF77-Trägersignal über ausreichend lange Mittelungszeiten erfolgen,
damit die ausbreitungsbedingten sowie die durch die BPSK
verursachten Phasenzeitschwankungen ausreichend eliminiert werden. Welche Phasenzeit- bzw. Frequenzschwankungen in Braunschweig, 273 km vom Sendeort
entfernt, auftreten, wurde vor einigen Jahren in der PTB
genauer untersucht.
Die Bilder 7 und 8 geben die Ergebnisse dieser Untersuchung wieder und zeigen die aus den gemessenen Phasenzeitschwankungen errechneten mittleren relativen
Frequenzschwankungen. Sie werden durch die Standardabweichung s ausgedrückt, um die die empfangene Trägerfrequenz bei einer Einzelmessung, bezogen auf den durch
UTC(PTB) vorgegebenen Sollwert, unsicher ist.
Bild 7 Standardabweichung s der relativen Abweichung
der in 273km Entfernung empfangenen DCF77-Trägerfrequenz vom Sollwert in Abhängigkeit von der Tageszeit (MEZ) mit der Mittelungszeit als Parameter
.
In Bild 7 ist s in Abhängigkeit von der Tageszeit mit der
Mittelungszeit als Parameter dargestellt, wobei die angegebenen s-Werte jeweils auf 49 im Frühjahr durchgeführten Einzelmessungen basieren. Man erkennt an den
Kurven, daß bei kurzen Mittelungszeiten am Tage geringere Unsicherheiten erreicht werden als in der Nacht.
Andererseits mitteln sich die durch Raumwelleneinfluß
verursachten Frequenzschwankungen auch in der Nacht
weitgehend heraus, wenn über genügend lange
Mittelungszeiten, z.B. über 6 Stunden, gemessen wird.
Bild 8 zeigt s in Abhängigkeit von der Mittelungszeit t,
wobei die angegebenen Punkte typische Werte sind, die
im Jahresmittel gelten und auf nur tagsüber ermittelten
Meßwerten beruhen. Im Sommer können die s-Werte
noch etwas kleiner, im Winter dagegen noch etwas größer sein. Aus dem Kurvenverlauf läßt sich für die Abhängigkeit von s von der Mittelungszeit t auch folgende
Formel angeben:
Empfang der DCF77-Normalfrequenz
Wird der Träger von DCF77 zur Überwachung oder automatischen Nachsteuerung von Normalfrequenzgeneratoren genutzt, müssen die dazu erforderlichen Frequenz- bzw. Phasenzeitvergleiche zwischen dem lokalen
18 DEUTSCH
-9
s=6,4 X 10
X t - 0,72, t in s.
Um noch den zunehmenden Raumwelleneinfluß bei größeren Entfernungen vom Sender zu verdeutlichen, sind
in Bild 12 zusätzlich einige s-Werte für den etwa 700km
von Braunschweig entfernten Schweizer Normal-
Änderungen vorbehalten / Subject to change without notice
Page 19

frequenzsender HBG auf 75kHz angegeben. Unter der
Annahme, daß die von Atomuhren abgeleiteten Trägerfrequenzen beider Sender näherungsweise gleich stabil
sind, zeigt die HBG-Kurve, daß die ausbreitungsbedingten
Frequenzschwankungen von HBG aufgrund seiner
2,5fach größeren Entfemung vom Empfangsort Braunschweig etwa zehnmal größer sind als die von DCF77.
Die für Braunschweig ermittelten Frequenzschwankungen können sicherlich als Anhaltswerte für
alle Empfangsorte dienen, an denen die Bodenwelle vorherrscht. Im Entfernungsbereich, in dem Boden- und
Raumwelle gleich groß werden können, sind dagegen
Frequenzvergleiche durch mögliches “Phasengleiten”
(“cycle slipping”) erschwert. In sehr großen Entfernungen, wenn die Raumwelle die Oberhand gewinnt, liegen
wieder konstante Verhältnisse vor. Hier sollten Frequenzvergleiche möglichst nur am Tage oder in der Nacht bei
stabiler Raumwellenausbreitung vorgenommen werden,
damit die Laufzeitänderungen durch das Wandern der DSchicht in der Dämmerung nicht als Änderungen der
Referenzfrequenz interpretiert werden.
Bild 8 Standardabweichung s der relativen Abweichung
der in 273km Entfernung am Tage empfangenen DCF77Trägerfrequenz vom Sollwert in Abhängigkeit von der
Mittelungszeit
.
Literatur:
Auszug aus: PTB - DCF77 aus Telekom Praxis 1/93
Autor Dr.-Ing. Peter Hetzel
Änderungen vorbehalten / Subject to change without notice
DEUTSCH 19
 Loading...
Loading...