

Page 1
Document 7100.004224 03/2017
Instruction Manual
PSx3xxC
halstrup-walcher GmbH
Stegener Straße 10
D-79199 Kirchzarten
Tel.: +49 (0) 76 61/39 63–0
Fax: +49 (0) 76 61/39 63–99
E-Mail: info@halstrup-walcher.com
Internet: www.halstrup-walcher.com
Page 2

Instruction Manual PSx3xxC
2
Table of Contents
1 Safety precautions .................................................................................................................... 4
1.1 Appropriate use ......................................................................................................................... 4
1.2 Shipping, assembly, electrical connections and start-up ............................................................ 4
1.3 Troubleshooting, maintenance, repairs, disposal ....................................................................... 4
1.4 Symbols .................................................................................................................................... 5
2 Device description .................................................................................................................... 5
2.1 Features ............................................................................................................................... 5
2.2 Installation Hollow shaft: ...................................................................................................... 5
2.3 Pin assignment ..................................................................................................................... 6
2.4 Setting the device address and baud rate ............................................................................. 7
2.5 Start-up ................................ ................................................................................................ . 8
2.6 CAN Bus ............................................................................................................................... 9
3 Sequence of positioning ......................................................................................................... 23
4 Specials ................................................................................................................................. 23
5 Technical Data ....................................................................................................................... 30
Page 3

Instruction Manual PSx3xxC
3
Purpose of instruction manual
This instruction manual describes the features of the PSx3xxC positioning system
and provides guidelines for its use.
Improper use of these devices or failure to follow these instructions may cause injury
or equipment damage. Every person who uses the devices must therefore read the
manual and understand the possible risks. The instruction manual, and in particular
the safety precautions contained therein, must be followed carefully. Contact the
manufacturer if you do not understand any part of this instruction manual.
Handle this manual with care:
It must be readily available throughout the lifecycle of the devices.
It must be provided to any individuals who assume responsibility for operating the
device at a later date.
It must include any supplementary materials provided by the manufacturer.
The manufacturer reserves the right to continue developing this device model without
documenting such development in each individual case. The manufacturer will be
happy to determine whether this manual is up-to-date.
Conformity
This device is state of the art. It complies with the legal requirements of EC
directives. This is shown by the CE mark.
© 2010, 2015, 2016, 2017
The manufacturer owns the copyright to this instruction manual. It contains technical
data, instructions and drawings detailing the devices’ features and how to use them. It
must not be copied either wholly or in part or made available to third parties.
Page 4

Instruction Manual PSx3xxC
4
1 Safety precautions
1.1 Appropriate use
Positioning systems are especially suitable for automatically setting tools, stops or
spindles for wood-processing equipment, packing lines, printing equipment, filling
units and other types of special machines.
PSx3xxC positioning systems are not stand-alone devices and may only be
used if coupled to another machine.
Always observe the operating requirements — particularly the permissible supply
voltage — indicated on the rating plate and in the “Technical data” section of this
manual.
The device may only be handled as indicated in this manual. Modifications to the device are prohibited. The manufacturer is not liable for damages caused by improper
use or failure to follow these instructions. Violations of this type render all warranty
claims null and void.
1.2 Shipping, assembly, electrical connections and start-up
Assembly and the electrical connections should only be handled by professionals.
They should be given proper training and be authorised by the operator of the facility.
The device may only be operated by appropriately trained individuals who have been
authorized by the operator of the facility.
Specific safety precautions are given in individual sections of this manual.
1.3 Troubleshooting, maintenance, repairs, disposal
The individual responsible for the electrical connections must be notified immediately
if the device is damaged or if errors occur.
This individual must take the device out of service until the error has been corrected
and ensure that it cannot be used unintentionally.
This device requires no maintenance.
Only the manufacturer may perform repairs that require the housing to be opened.
The electronic components of the device contain environmentally hazardous materi-
als and materials that can be reused. The device must therefore be sent to a recycling plant when you no longer wish to use it. The environment codes of your particular country must be complied with.
Page 5
Instruction Manual PSx3xxC
5
1.4 Symbols
The symbols given below are used throughout this manual to indicate instances when
improper operation could result in the following hazards:
WARNING! This warns you of a potential hazard that could lead to bodily injury up
to and including death if the corresponding instructions are not followed.
CAUTION! This warns you of a potential hazard that could lead to significant
property damage if corresponding instructions are not followed.
INFORMATION! This indicates that the corresponding information is important
for operating the device properly.
2 Device description
2.1 Features
The PSx3xxC positioning system, an intelligent, compact, complete solution for
positioning auxiliary and positioning axes, consists of an EC motor, gear power
amplifier, control electronics, absolute measuring system and CANopen interface.
The integrated absolute measuring system eliminates the need for a time-consuming
reference run. Connecting to a bus system simplifies the wiring. A hollow shaft with
adjustable collar makes assembly quite simple. The positioning system is especially
suitable for automatically setting tools, stops or spindles for wood-processing
equipment, packing lines, printing equipment, filling units and other types of special
machines.
PSx3xxC positioning systems convert a digital positioning signal into an angle of
rotation.
2.2 Installation
Hollow shaft:
The PSx3xxC is mounted onto the machine by sliding the hollow shaft of the
positioning gear onto the axis to be driven and then securing it with an adjustable
collar (recommended diameter of the axis is either 8h9 or 14h9; wrench torque for
screw: 1.5Nm). The adjustable collar should be tightened only just to the point where
it can no longer rotate freely.
Securing the pin under the hollow shaft into an appropriate bore will prevent further
rotation.
Page 6

Instruction Manual PSx3xxC
6
Solid shaft:
The PSx3xxC is mounted on the machine by fixing the solid shaft with coupling and
intermediate flange to the axis of the machine.
Never apply force to the housing cover, e.g., for supporting weight.
Driving the PSx3xxC rearward is prohibited (e.g. it’s not allowed to turn
the output shaft by an external force).
2.3 Pin assignment
For the supply voltage either a Binder series 713/763 (A-coded) round, 5-pin plug for
PSE and PSS devices or a 5-pin Harting plug with protective sleeve (HAN4A) for the
PSE34xx devices is located in the housing cover of the PSx3xxC.
A series 715 (B encoded) 5-pin round socket and 5-pin (B encoded) plug are provided
for connecting the CAN bus.
A 9-pin, D-sub plug is also available as an optional CAN bus connection.
A Binder series 718 4-pin plug is used to connect the jog keys (optional).
Supply voltage connector: Connector for jog keys:
round plug Harting plug (external top view)
(external top view)
1 +24V motor 1 +24V (output)
2 GND (motor) 2 forward key
3 +24V control unit 3 reverse key
4 GND (control unit) 4 ground
5 housing/pressure balance
To prevent the ingression of fluids into the PSW-housing during
cooldown, use a special cable with an airtube for pressure balancing
of your PSW.
9-pin, D-sub plug for CAN bus:
(external top view)
2 CAN_L
3 CAN_GND
7 CAN_H
rest: not assigned
Page 7
Instruction Manual PSx3xxC
7
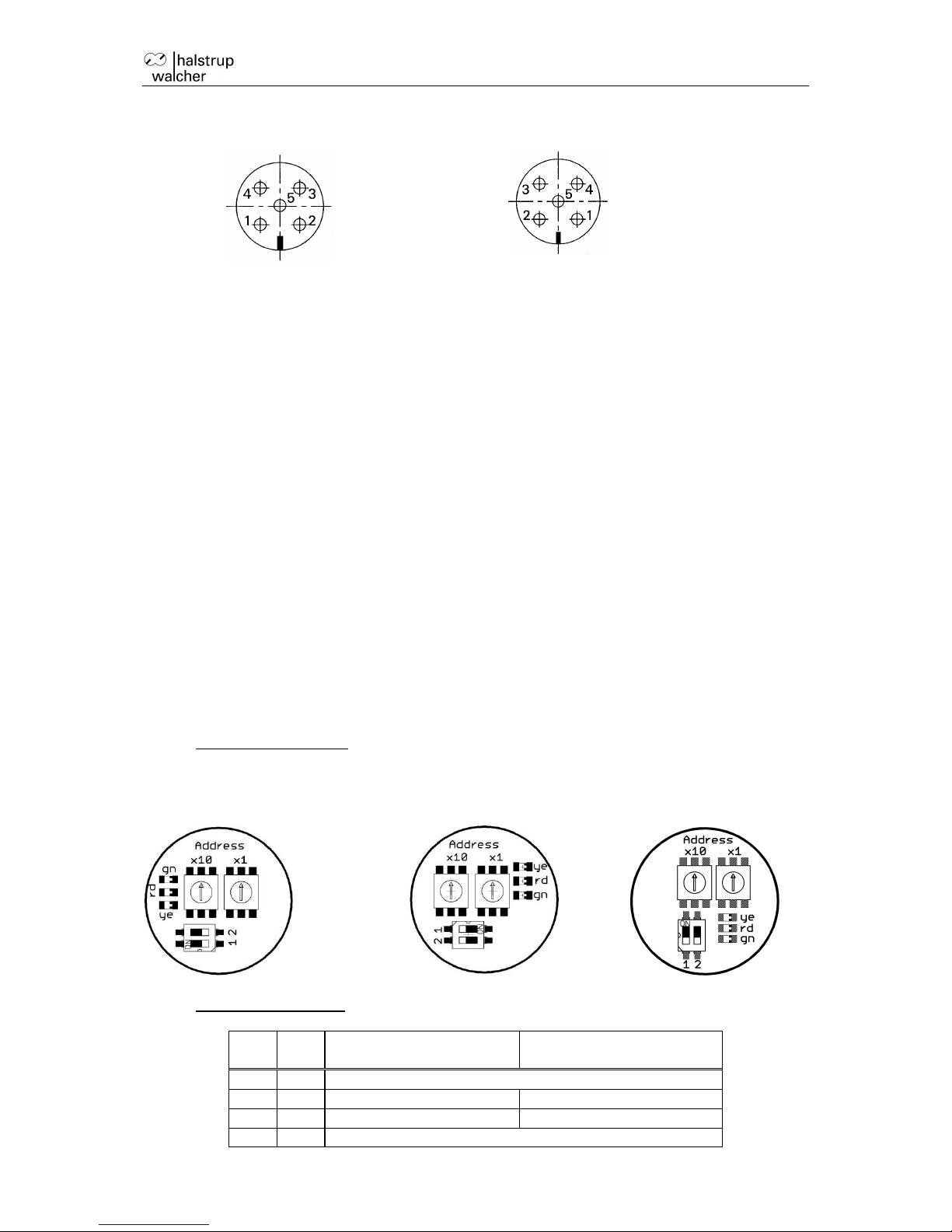
Round plug for CAN bus: Round socket for CAN bus:
(external top view) (external top view)
1 housing 4 CAN_H
2 not assigned 5 CAN_L
3 CAN_GND
Electrical grounding:
Next to the connecting plugs there is a M4 stud bolt. It is recommended to connect
the positioning system with a cable as short as possible to the machine base. The
minimum wire cross section therefor is 1.5mm².
2.4 Setting the device address and baud rate
Removing the protective cap provides access to two rotary switches for setting the
device address at the bus and a 2-pin sliding switch for setting the baud rate.
The rotary switches indicate the tens and ones places of the address selected. If the
switches are resting in the positions 00 or 01 the address is set using the CAN bus
with SDO #2026.
The delivery setting is 00, the PSx3xxC reports to the bus with the address 1.
If the switches have been used to set the address (i.e. the switch setting is > 01), this
value cannot be changed via the CAN bus.
The yellow LED represents the state of the motor supply voltage, the red and green
LEDs represent the CANopen state.
Switch configurations:
PSx30xC, PSx31xC-8, PSx32xC, PSx31xC-14, PSx33xC, PSE34xxC
PSE31xxC
Setting the baud rate:
1
2
PSx30xC, PSx31xC-8,
PSx32xC, PSx31xxC,
PSx31xC-14, PSx33xC,
PSE34xxC
OFF
OFF
baud rate is set via bus (default = 500 kBaud)
OFF
ON
500 kBaud
250 kBaud
ON
OFF
250 kBaud
500 kBaud
ON
ON
125 kBaud
Page 8
Instruction Manual PSx3xxC
8
If the device names are given without the diameter of the output shaft (-8, -
14), the relevant information is valid for all offered output shafts (applies
throughout the document).
‘x’ in the device name stands for a number in the range 0..9. ‘xx’ in the
device name stands for a number in the range 10..999.
Important: Always replace the protective cap after setting the address.
This will prevent dust and contaminants from entering the device.
2.5 Start-up
Unlike previous versions, the PSx3xxC does not have to be run through an initial
reference loop prior to positioning after the supply voltage has been hooked up. A
positioning or manual run can begin immediately.
Positioning sequence (with loop)
The PSx3xxC differs between the following steps of a positioning sequence
(Presumption: the target position is always approached through forward motion):
1. New position value is larger than the current value: position approached directly.
2. New position value is smaller than the current value: the device reverses 5/8 of
one rotation and approaches the exact position after resuming forward motion.
3. New position value after reverse run without loop: the device always approaches
the position by moving in forward direction; if necessary, it will first reverse by 5/8
of a rotation.
Once the target position has been reached, the device compares it to the internal
absolute encoder status. If a discrepancy is detected, the device then sets the “error”
bit (bit 9 in the status word).
Positioning sequence (without loop)
The “positioning without loop” mode is used primarily for moving the small distances
involved in fine adjustments. In this case, each position is approached directly. This
does NOT eliminate any play present in the spindle in question. The PSx3xxC internal
gear backlash does not play a role in this case, as position data are acquired directly
at the output shaft.
Runs which involve specifically a block run (e.g. reference runs on block),
may only be started with reduced torque (max. torque max. 10% of the
nominal torque).
Underwater usage of the PSW is not allowed.
Page 9

Instruction Manual PSx3xxC
9
2.6 CAN Bus
CANopen (corresponding to CiA DS 301 Version 4.02) is used as the protocol at the
CAN bus interface:
one transmit and one receive SDO per device
one asynchronous transmit and receive PDO, active by default
one heartbeat object every 500 msec
green LED = RUN-LED according CANopen:
Single flashes: CAN stop
Continuous flashing: CAN preoperational
Continuously illuminated: CAN operational
red LED = ERROR-LED according CANopen:
Off: no error
Single flashes: CAN-transmitter or -receiver has reached its
warning limit
Double flashes: Guard event has occurred
Triple flashes: Sync failure
Continuously illuminated: CAN-Bus-OFF
yellow LED = Display actuator voltage
Off: supply voltage for motor to low or to high
On : supply voltage ok
Flashing: supply voltage ok, PSx in delivery state
Page 10

Instruction Manual PSx3xxC
10
a) Table of entries implemented from object dictionary
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
device model
1000
returns a “0” when read
0 0
R
error register
1001
Bit 0: general error
Bit 4: communication error
8 bit
0 R
error list
1003
sub index 0: quantity of indexes
sub index 1 and 2: most recent
emergency errors
8 bit
32 bit
0 0 R
R
sync ID
1005
COB ID for the sync command
32 bit
no
80h
R/W
comm cycle
1006
communication cycle time
32 bit
no 0 R/W
sync window
1007
synchronous window time
32 bit
no 0 R/W
guard time
100C
guard time in msec
0 = off
16 bit
no 0 R/W
life time
100D
life time factor
8 bit
no 0 R/W
emcy ID
1014
COB ID for emergency message
32 bit
80h+
device
address
R
emcy inhibit
1015
inhibit time for emergency message
16 bit
no 0 R/W
consumer
heartbeat
1016
sub index 0: quantity of indexes (= 2)
sub index 1 and 2:
bit 15-0: Heartbeat time in msec
bit 23-16: node ID of producer
8 bit
32 bit
no 2 0 R R/W
producer
heartbeat
1017
cycle time for heartbeat via PSx3xxC
0 = off
16 bit
no
500
R/W
identity
1018
sub index 0: quantity of indexes (= 4)
sub 1: Vendor-ID (= 0x000002D8)
sub 2: Product code (= 0x30313334)
sub 3: Revision number (= 0)
sub 4: Serial number (= 0)
8 bit
32 bit
32 bit
32 bit
32 bit
4 R
R
R
R
R
receive
PDO 1
communication
parameter
1400
sub index 0: quantity of indexes
sub 1: COB ID of this PDO
8 bit
32 bit
no 0 200h+
device
address
R
R/W
sub 2: PDO type
8 bit
no
0xFF
R/W
receive
PDO 1
mapping
1600
sub index 0: quantity of indexes (= 3)
sub 1: 0x20240010
sub 2: 0x00000010
sub 3: 0x20010020
8 bit
32 bit
32 bit
32 bit
3 R
R
R
R
transmit
PDO 1
communication
parameter
1800
sub index 0: quantity of indexes
sub 1: COB ID of this PDO
8 bit
32 bit
no 0 180h+
device
address
R
R/W
sub 2: PDO type
sub 3: inhibit time
8 bit
16 bit
no
no
0xFF
1000
(100ms)
R/W
R/W
sub 5: event time
16 bit
no 0 R/W
transmit
PDO 1
mapping
1A00
sub index 0: quantity of indexes (= 3)
sub 1: 0x20250010
sub 2: 0x20300010
sub 3: 0x20030020
8 bit
32 bit
32 bit
32 bit
3 R
R
R
R
Page 11

Instruction Manual PSx3xxC
11
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
2000:
0...9
10 general purpose registers
16 bit
yes 0 R/W
target value
2001
target position to be achieved
value in 1/100 mm (for default settings of
numerator #2010 and denominator
#2011)
31 bit
no 0 R/W
actual value
2003
current actual position
value in 1/100 mm (for default settings of
numerator #2010 and denominator
#2011)
Writing onto this index number causes the
current position to be “referenced” onto
the transferred value
31 bit
no R/W
referencing
value
2004
correction factor for the target, actual and
limit switch values
31 bit
yes 0 R/W
drag error
2005
maximum drag error before the ‘drag
error’ bit is set.
Value given in increments (at a resolution
of 0.5 mm)
20...1000
16 bit
yes
40
R/W
positioning
window
2006
permissible difference between target and
actual values for “position reached” bit
The maximum value that can be set
changes according to the same factor as
the resolution
1...100
16 bit
yes 2 R/W
actual value
assessment,
numerator
2010
These values can be used to set a
desired user resolution to the drive.
For a numerator factor of 400, the
denominator factor holds the spindle pitch
per resolution
e.g.: spindle pitch 1.5 mm with resolution
1/100 mm:
numerator = 400, denominator = 150
1...10000
16 bit
yes
400
R/W
actual value
assessment,
denominator
2011
1...10000
16 bit
yes
400
R/W
target rpm
posi
2012
value in rpm
maximum rpm to be used for positioning
runs
see table
16 bit
yes
see
table
R/W
target rpm
hand
2013
value in rpm
maximum rpm to be used for manual runs
see table
16 bit
yes
see
table
R/W
maximum
torque
2014
Applies after completion of start phase
(during start phase the value #2018
applies); value in cNm
see table
16 bit
yes
see
table
R/W
upper limit
2016
maximum permitted target position
permissible values: (upper mapping end -
1200..101200 * denominator / numerator)
31 bit
yes
101200
R/W
lower limit
2017
minimum permitted target position
permissible values: (upper mapping end -
1200..101200 * denominator / numerator)
31 bit
yes
1200
R/W
maximum
start-up
torque
2018
value in cNm
see table
16 bit
yes
see
table
R/W
time period
for start-up
torque
2019
value in msec
10...1000
16 bit
yes
200
R/W
Page 12

Instruction Manual PSx3xxC
12
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
rpm limit for
aborting run
201A
value in % of the target rpm
30...90
16 bit
yes
30
R/W
time elapsed
until speed
falls below
rpm limit for
aborting run
201B
value in msec
50...500
16 bit
yes
200
R/W
acceleration
201C
value in rpm per sec.
see table
16 bit
yes
see
table
R/W
deceleration
201D
value in rpm per sec.
see table
16 bit
yes
see
table
R/W
length of loop
201F
minimum number of increments which the
drive moves in a pre-defined direction
when approaching a target position
value in increments (value = 0 no loop)
0.025…1
rotations
or 0
32 bit
yes
250
R/W
maximum
rpm, counterclockwise
2020
value in rpm
see table
16 bit
yes
see
table
R/W
maximum
rpm,
clockwise
2021
value in rpm
see table
16 bit
yes
see
table
R/W
size of
individual
increment
2022
number of increments when external keys
pressed (or when activating a jog run bit)
for a short-time
1...100
16 bit
yes 1 R/W
idle period for
manual run
2023
Span of time a manual run key must be
pressed (or a jog run bit must be
activated) in order to begin a manual run
value in steps of 5 msec
20...2000
16 bit
yes
200
R/W
Page 13

Instruction Manual PSx3xxC
13
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
control word
2024
Bit 0: manual run to larger values
Bit 1: manual run to smaller values
Bit 2: transfer target value (when sending
the target values with the help of PDOs,
positioning will only take place if this bit is
set)
Bit 3: release for manual run in jog key
mode: if this bit is not set, only single
steps are possible in jog key mode
Bit 4: release: the axle will only run if this
bit is set (exception is the jog key mode
with the external keys or with bits 8/9)
Bit 5: release for jog key mode with the
external keys: If the CAN bus is
connected, the external keys are only
active if this bit is set
Bit 6: run without loop
Bit 7: start initial reference loop
Bit 8: jog run to larger values
Bit 9: jog run to smaller values
Bit 10: release readjustment
Bit 11: execute braking-free-run
Bit 12: run with drag error correction
All other bits must be set to 0!
16 bit
no 0 R/W
status word
2025
Bit 0: target position reached
Bit 1: drag error
Bit 2: reverse jog key active
Bit 3: forward jog key active
Bit 4: motor power present
Bit 5: positioning run aborted
Bit 6: drive is running
Bit 7: temperature exceeded
Bit 8: movement opposite loop direction
Bit 9: error
Bit 10: positioning error (block)
Bit 11: manual displacement
Bit 12: incorrect target value
Bit 13: motor power was missing
Bit 14: positive range limit
Bit 15: negative range limit
0..FFFFh
16 bit
R
CAN address
2026
address of drive (if set by CAN bus)
This value cannot be changed if the
address switches are used (i.e. the switch
setting is > 01).
1...127
16 bit
yes 1 R/W
baud rate
2027
0: 50 kBaud 1: 125 kBaud
2: 250 kBaud 3: 500 kBaud
4: 1000 kBaud
This value cannot be changed if the baud
rate switch is used (i.e. the switch setting
is not OFF-OFF).
0...4
16 bit
yes 3 R/W
Page 14

Instruction Manual PSx3xxC
14
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
upper
mapping end
2028
definition of the positioning range relative
to the absolute measuring system
permissible values:
(1 + ref.value) … (204800 *
denominator / numerator - 1 + ref.value)
31 bit
yes
102400
R/W
maximum
holding
torque
202B
maximum holding torque at standstill in
cNm
see table
16 bit
yes
see
table
R/W
direction of
rotation
202C
0: clockwise
(if looking at the output shaft)
1: counter clockwise
0 or 1
16 bit
yes 0 R/W
running
direction for
approaching
target
positions
202D
0: with 5/8 forward rotation
1: with 5/8 reverse rotation
(5/8 rotation is the default value, see
#201F)
0 or 1
16 bit
yes 0 R/W
idle period
202E
idle period in msec when reversing the
direction of rotation
10...
10000
16 bit
yes
10
R/W
actual rpm
2030
value in rpm
16 bit
R
maximum
torque
2031
maximum torque occurring during the
most recent run (start phase, during which
the maximum start-up torque applies, see
SDOs #2018/2019, and the phase when
the drive is braking down, are not
considered)
value in cNm
16 bit
R
actual torque
2033
value in cNm
16 bit
R
U control
203A
current supply voltage for control unit
given in increments of 0.1 V
16 bit
R
U motor
203B
current supply voltage for motor given in
increments of 0.1 V
16 bit
R
Umot limit
203C
voltage limit for bit ‘motor power present’
given in increments of 0.1 V
180...240
16 bit
yes
185
R/W
Umot filter
203D
average time for measuring current power
to motor; given in 5 msec increments
100...
1000
16 bit
yes
100
R/W
temperature
limit
203E
upper temperature limit in °C
10...70
16 bit
yes
70
R/W
device
temperature
203F
internal device temperature in °C
16 bit
R
production
date
2040
year and week of manufacturing
(given as an integer)
JJWW
16 bit
R
serial number
2041
serial device number
0...65535
16 bit
R
maximum
holding
torque at end
of run
2042
value in cNm
see table
16 bit
yes
see
table
R/W
Page 15

Instruction Manual PSx3xxC
15
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
duration of
maximum
holding
torque at end
of run
2043
time period at end of run, in which the
‘maximum holding torque at end of run’
applies (value in msec)
0..1000
16 bit
yes
200
R/W
waiting time
for brake
(begin of run)
2044
time period before the begin of run, in
which the brake can be released without
the motor is moving (value in msec)
0...2000
16 bit
yes
150
R/W
waiting time
for brake
(end of run)
2045
time period after the end of run, in which
the brake stays released (value in msec)
0...3000
16 bit
yes
1000
R/W
number of
braking-free
steps
2048
number of steps for the braking-free-run
1...50
16 bit
yes
see
table
R/W
activation of
external keys
204C
when CAN bus is not connected:
0: external keys are active, if the address
0 or 1 is set with the help of the
address switches
1: external keys are active
when CAN bus is connected:
0: only, if in the control word bit 5 is
active (‘release for jog key mode’) and
bit 4 is inactive (‘release for positioning
by bus’)
1: additionally, when the CANopen state
is ‘preoperational’
(When the external keys are active, bits 8
and 9 of the control word are inactive.)
0 or 1
16 bit
yes 0 R/W
device model
204D
One of the following device models of the
PSx series (5-digit numbers show the
diameter of the output shaft in their last 2
places):
PSE and PSS:
30108, 30114, 30208, 30214, 30508,
30514, 31108, 31114, 31208, 31214, 315,
322, 325, 332, 335, 3110, 3125, 3410,
3418
PSW:
36108, 36114 (= 301-8/14)
36208, 36214 (= 302-8/14)
36508, 36514 (= 305-8/14)
37108, 37114 (= 311-8/14)
37208, 37214 (= 312-8/14)
375 (=315-8)
382 (=322-14)
385 (=325-14)
392 (=332-14)
395 (=335-14)
16 bit
R
version
204E
software version number
16 bit
R
Page 16

Instruction Manual PSx3xxC
16
Name
Index
number
Function
Range of
value
Back
up
Delivery
State
R/W
delivery state
204F
writing ‘-1’:
generates the delivery state without
modifying the CAN address and the baud
rate (starts initial reference loop, then
positioning to the middle of the
measurement range)
writing ‘-2’:
generates the delivery state (sets CAN
address SDO #2026 to 1, baud rate SDO
#2027 to 500 kBaud, starts initial
reference loop, then positioning to the
middle of the measurement range)
A different CAN address or baud rate is
only active after reset or reset
communication!
writing ‘1’:
saves all parameters in the EEPROM
reading directly after boot:
0 content of memory correct
≠ 0 content of memory incorrect
reading after saving:
0 saving finished successfully
≠ 0 saving is still in progress or is
finished incorrectly (the time for saving is
up to 100 msec)
-1, -2 or
1
16 bit
no R/W
Page 17

Instruction Manual PSx3xxC
17
Table of rated speed and torque values for various models of gears
device model
PSsE and PSS
301-x
311-x
302-x
312-x
305-x
315-8
322-14
332-14
325-14
335-14
328-14
Name
Index
number
value range
delivery state
target rpm posi
2012
15...230
230
10...150
150
3...70
70
20...200
170
10...100
85
5…45
45
target rpm hand
2013
15...230
80
10...150
50
3...70
20
20...200
80
10...100
40
5…45
22
maximum rpm,
counterclockwise
2020
15...230
230
10...150
150
3...70
70
20...200
170
10...100
85
5...45
45
maximum rpm,
clockwise
2021
15...230
230
10...150
150
3...70
70
20...200
170
10...100
85
5...45
45
acceleration
201C
97...600
600
50...400
400
23...130
130
97...525
525
50...260
260
22…100
100
deceleration
201D
97...600
600
50...400
400
23...130
130
97...525
525
50...260
260
22…100
100
maximum torque
2014
2...100
100
10...200
200
50...500
500
10...200
200
20...400
400
80...960
800
maximum start-up
torque
2018
2...125
125
10...250
250
50...600
600
10...250
250
20...500
500
80...960
960
maximum holding
torque
202B
0...90
30
0...150
50
0...300
100
0...100
35
0...200
70
0...450
150
maximum holding
torque at end of run
2042
0...180
60
0...300
100
0...600
200
0...200
70
0...400
140
0...700
300
number of brakingfree steps
2048
1...50
4
1...50
4
1...50
3
1...50
4
1...50
4
1...50
3
device model PSW
301-x
311-x
302-x
312-x
305-x
315-8
322-14
332-14
325-14
335-14
328-14
Name
Index
number
value range
delivery state
target rpm posi
2012
15...180
180
10...125
125
3...60
60
20...150
125
10...80
60
5…35
35
target rpm hand
2013
15...180
80
10...125
50
3...60
20
20...150
80
10...80
40
5…35
22
maximum rpm,
counterclockwise
2020
15...180
180
10...125
125
3...60
60
20...150
125
10...80
60
5...35
35
maximum rpm,
clockwise
2021
15...180
180
10...125
125
3...60
60
20...150
125
10...80
60
5...35
35
acceleration
201C
97...600
600
50...400
400
23...130
130
97...525
525
50...260
260
22…100
100
deceleration
201D
97...600
600
50...400
400
23...130
130
97...525
525
50...260
260
22…100
100
maximum torque
2014
2...100
100
10...200
200
50...500
500
10...200
200
20...400
400
80...960
800
maximum start-up
torque
2018
2...125
125
10...250
250
50...600
600
10...250
250
20...500
500
80...960
960
maximum holding
torque
202B
0...90
30
0...150
50
0...300
100
0...100
35
0...200
70
0...450
150
maximum holding
torque at end of run
2042
0...180
60
0...300
100
0...600
200
0...200
70
0...400
140
0...700
300
number of brakingfree steps
2048
1...50
4
1...50
4
1...50
3
1...50
4
1...50
4
1...50
3
Page 18

Instruction Manual PSx3xxC
18
device model PSE
3210-14
3310-14
3218-14
3325-14
Name
Index
number
value range
delivery state
target rpm posi
2012
5...40
40
3...22
22
2...12
12
target rpm hand
2013
5...40
20
3...22
10
2...12
6
maximum rpm,
counterclockwise
2020
5...40
40
3...22
22
2...12
12
maximum rpm,
clockwise
2021
5...40
40
3...22
22
2...12
12
acceleration
201C
25...130
130
15...70
70
10...50
50
deceleration
201D
25...130
130
15...70
70
10...50
50
maximum torque
2014
100…1000
1000
200...1800
1800
300...2500
2500
maximum start-up
torque
2018
100...1200
1200
200...2000
2000
300...3000
2800
maximum holding
torque
202B
0...500
200
0...900
300
0...1200
400
maximum holding
torque at end of
run
2042
0...1000
300
0...1800
600
0...2500
800
number of brakingfree steps
2048
1...50
4
1...50
4
1...50
4
device model PSE
3110-14
3125-14
3410-14
3418-14
Name
Index
number
value range
delivery state
target rpm posi
2012
1…30
30
1…12
12
10...100
100
5...90
90
target rpm hand
2013
1…30
12
1…12
5
10...100
40
5...90
30
maximum rpm,
counterclockwise
2020
1…30
30
1…12
12
10...100
100
5...90
90
maximum rpm,
clockwise
2021
1…30
30
1…12
12
10...100
100
5...90
90
acceleration
201C
9…50
50
4…20
20
20...350
350
10...315
315
deceleration
201D
9…50
50
4…20
20
20...350
350
10...315
315
maximum torque
2014
100…1000
1000
250…2500
2500
100...1000
1000
100...1800
1800
maximum start-up
torque
2018
100…1200
1200
250…3000
3000
100...1200
1200
100...2000
2000
maximum holding
torque
202B
0…600
200
0…1250
450
0...300
200
0...450
300
maximum holding
torque at end of
run
2042
0…1200
400
0…2500
900
0...600
400
0...900
600
number of brakingfree steps
2048
1...50
3
1...50
3
1...50
4
1...50
4
Page 19

Instruction Manual PSx3xxC
19
b) PDO definition
1) Receive PDO (from the perspective of the PSx3xxC)
Identifier: 200h + CAN address (possible values: 201h...27Fh)
Assignment (cannot be modified):
Bit
Byte
Description
corresponding SDO index number
0-15
0,1
control word
2024h
16-31
2,3
unused
31-63
4-7
target value
2001h
2) Transmit PDO (from the perspective of the PSx3xxC)
Identifier: 180h + CAN address (possible values: 181h...1FFh)
Assignment (cannot be modified):
Bit
Byte
Description
corresponding SDO index number
0-15
0,1
status
2025h
16-31
2,3
current rpm
2030h
31-63
4-7
actual value
2003h
c) Detailed description of status bits
Bit 0: target position reached
This bit is set:
- when a transferred target position has been reached successfully
- after running an initial reference loop, when the actual value corresponds to
the previously transferred target value
This bit is reset:
- after transferring a target position if the difference from the actual value is
larger than the positioning window (SDO #2006)
- by a manual run
- if an invalid target value has been transferred
- if rotated manually when on standstill
Bit 1: drag error
This bit is set:
- if, after the acceleration phase, the maximum speed setting has not been
achieved
This bit is reset:
- with each new run command
Bit 2: reverse jog key active
This bit is set:
- if Pin 3 on the key connector is connected with Pin 1 (+24V)
This bit is reset:
- if Pin 3 on the key connector is deconnected from Pin 1 (+24V)
Bit 3: forward jog key active
This bit is set:
- if Pin 2 on the key connector is connected with Pin 1 (+24V)
This bit is reset:
- if Pin 2 on the key connector is deconnected from Pin 1 (+24V)
Page 20

Instruction Manual PSx3xxC
20
Bit 4: motor power present
This bit is set:
- if the supply voltage to the motor is above the Umot limit (SDO #203C) and
below 30V
This bit is reset:
- if the supply voltage to the motor is below the Umot limit or above 30V
Bit 5: positioning run aborted
This bit is set:
- if a positioning run is aborted because release in the control word has been
withdrawn
This bit is reset:
- when a new run command is transmitted
Bit 6: drive is running
This bit is set:
- when the drive is rotating
This bit is reset:
- when the drive is on standstill
Bit 7: temperature exceeded
This bit is set:
- if the internal device temperature device exceeds the limit value (SDO
#203E)
This bit is reset:
- if the internal device temperature falls below the limit value by 5°C
Bit 8: movement opposite loop direction
This bit is set:
- during a manual run in the direction opposite that of the loop direction (a
subsequent manual run in the loop direction will not reset this bit)
- during a positioning sequence in the direction opposite that of the loop
direction
This bit is reset:
- when a transferred target position has been reached successfully (in the loop
direction)
- after the initial reference loop
Bit 9: error
This bit is set:
- if an internal problem is detected when calculating a position
No run commands (except the initial reference loop) can be executed when
the error bit is set!
This bit is reset:
- when an initial reference loop is completed correctly
Bit 10: positioning error (block)
This bit is set:
- if a positioning run is aborted because the device is overloaded (block,
extreme difficulty while running)
This bit is reset:
- by transmitting a new positioning command
- after an initial reference loop has been executed correctly
Page 21

Instruction Manual PSx3xxC
21
Bit 11: manual displacement
This bit is set:
- if, while on standstill, the drive is turned externally by more than the value in
the positioning window
This bit is reset:
- by transmitting a new positioning command
- after an initial reference loop has been executed correctly
Bit 12: incorrect target value
This bit is set:
- when a transferred target value lies outside of the limit switches; also
caused, for instance, because of the actual value of the reference value
(SDO #2004)
- when a transferred target value lies inside of the limit switches; but because
of a necessary loop run the specified interval would be left
This bit is reset:
- by transmitting a valid target value
Bit 13: motor power was missing
This bit is set:
- if the power to the motor is less than the Umot limit (SDO #203C) or above
30V when initiating a positioning run or an initial reference loop
- if during the run the voltage leaves the given corridor
This bit is reset:
- if the power to the motor is above the Umot limit and below 30V when
initiating a positioning run or an initial reference loop
Bit 14 / 15: positive / negative range limit
This bit is set:
- if the limit value is reached during a manual run (but not if reached during a
positioning run)
- if a limit value is modified such that the current position lies beyond the limit
- if, while on standstill, by means of an external force the drive is moved to a
position which is outside the area which is defined by the range limits
This bit is reset:
- by initiating a positioning run, an initial reference loop or a manual run
d) Detailed description of control bits
Bit 0: manual run to larger values
Bit 1: manual run to smaller values
Bit 2: transfer target value: When transferring target values with the help of PDOs,
positioning will only take place if this bit is set.
Bit 3: Release for manual run in jog key mode: This bit must be set in order to
switch from jog key mode (run activated via the keys, if bit 5 is set; or via
command if bit 8 or 9 is set in the control word, if bits 4 and 5 are not set) to
manual run mode by holding down a key (or a jog key bit is activated for a
longer time). Single increments are the only option in jog key mode if this bit is
reset.
Page 22

Instruction Manual PSx3xxC
22
Bit 4: Release: Run commands will only be executed if this bit is set (exception is
the jog key mode with the external keys or with bits 8/9 of the control word).
This bit must be set for positioning runs, manual runs and must not be set for
jog runs.
If this bit is cleared during a run, the run will be aborted and status bit 5 will be
set (‘positioning run aborted’).
Bit 5: Release for jog key mode with the external keys: If the CAN bus is active, jog
key mode via the external keys is only possible if this bit is set and bit 4 is
reset. For jog key mode via CAN (bits 8 or 9 in the control word), this bit must
not be set.
Bit 6: Run without loop: If this bit is set during positioning runs, all target positions
will be approached directly (without loop)
Bit 7: Start initial reference loop: the device performs 5/8 of one rotation opposite to
the loop direction; it will then perform 5/8 of a rotation in loop direction at
manual run speed.
In earlier versions, this command had to be executed after switching on the
device; that is no longer the case.
Bit 8: jog run to larger values: Comes up to a keystroke of forward key (bit 3 in the
status word). Bits 4 and 5 must not be set in this mode!
Bit 9: jog run to smaller values: Comes up to a keystroke of backward key (bit 2 in
the status word). Bits 4 and 5 must not be set in this mode!
Bit 10: Release readjustment: Only if this bit is set the drive readjusts when it is
displaced out of its position in the direction opposite to that of the loop
direction at the end of a run. If bit 6 („run without loop“) is being set, the drive
readjusts the position in both directions.
Bit 11: Execute braking-free-run: At the beginning of a positioning at first the brake is
released and the “waiting time for brake” is being awaited (SDO #2044).
Within this time the brake should move towards its working position (in this
position of the brake the motor can move freely). After this waiting time the
motor moves a certain distance in both directions, in order to release a brake
which is eventually stucked. This distance (“number of braking-free steps”) is
being set in SDO #2048. For the execution of this command, bit 4 has to be
set simultaniously
Bit 12: Run with drag error correction: If the bit is set, the drive trys (under
consideration of the configured maximum torque) to compensate a drag error
which has been developped. By controling the rpm on a value which is slightly
above or below the configured ‘target rpm posi’ (SDO #2012), the drag error
decreases. The drag error correction operates only in positioning runs, i.e. not
in manual runs or in jog key mode. Furthermore it operates only while
accelerating and cruising with constant rpm, not while decelerating. The timedependent setting value for the rpm while accelerating arises out of the rpm at
beginning of the positioning as well as the acceleration setting (SDO #201C).
Bit 13: reserved, must be programmed to 0
Bit 14: reserved, must be programmed to 0
Bit 15: reserved, must be programmed to 0
Page 23

Instruction Manual PSx3xxC
23
3 Sequence of positioning
a) Positioning run
- The drive must be set to CANopen ‘operational mode’ before it can be controlled
using PDOs.
- Transfer target value (PDO with control word = 0014h and target value, or target
value to SDO #2001): drive begins run
- Abort run by resetting the release bit (transmit PDO with control word = 0000h or
transmit SDO #2024 with value 0000h).
- If a new target value is transferred during a positioning run, the device will
immediately proceed to the new target. There will be no interruption if the direction of
rotation does not need to be altered.
- If a manual run is transmitted during a positioning run, the positioning run will be
aborted (speed will be reduced to that of a manual run) and the device proceeds with
the manual run.
The following sequence of steps is also possible:
Starting situation:
- release has not been set
- Target value has already been transferred (in case of PDO transfer the release in the
control word was not set already)
Set release: drive begins run
b) Positioning run without loop
The sequence corresponds to that of a positioning run with loop; in addition to setting
the release, however, bit 6 in the control word also has to be set to execute the run
without loop.
c) Manual run
- start manual run (transmit PDO with control word = 0011h resp. 0012h or transmit
SDO #2024 with value 0011h resp. 0012h): device begins to run
- End manual run by clearing the manual run command (transmit PDO with control
word = 0010h or transmit SDO #2024 with value 0010h) or by deasserting release
(transmit PDO with control word = 0000h or transmit SDO #2024 with value 0000h).
- Transferring a target value during a manual run will end the manual run and the
device will immediately move on to the transmitted position.
4 Specials
a) Speed, acceleration and deceleration
The initial reference loop and the manual run are performed at the maximum speed
specified in SDO #2013; positioning runs are performed at the maximum speed
specified in SDO #2012. When the run is counterclockwise, additionally the maximum
speed in SDO #2020 applies, when the run is clockwise, the one in SDO #2021
applies. For all runs the maximum acceleration in SDO #201C and the maximum
deceleration in SDO #201D apply. At the end of each run the maximum deceleration
Page 24

Instruction Manual PSx3xxC
24
decreases during the approach to the destination successively in order to realize a
harmonic transient behaviour.
b) Response of drive in case of block or manual displacement
If during a run due to load the speed falls below the threshold parameter of 30% of
the selected maximum speed (SDO #201A) for longer than 200 msec (SDO #201B),
the device detects blocking, aborts the run and sets the ‘positioning error’ bit (here the
default values are given).
New run commands can then be transmitted with no further steps to take. An
exception is, if the run should go to the same target than before. In this case,
deassert the release (bit 4 of the control word) and assert it again, then transfer the
target position one more time (either by PDO or SDO).
If the PSx3xxC is displaced by external force during standstill opposite to the loop
direction and the release bit (bit 4) as well as the release readjustment bit (bit 10) in
the control word are being set, the device will attempt to reach the previously
transmitted target value once again (readjustment). The device does not attempt to
readjust if rotated in the loop direction; it merely sets the ‘manual rotation’ bit. If bit 6
(„run without loop“) is being set, the drive readjusts the position in both directions.
Deasserting the release and/or the release readjustment bit can completely stop the
readjustment process.
c) Calculating the absolute physical position
The PSx3xxC actuator includes an absolute measuring system with measurement
range of 250 rotations. This allows the user to determine the direction of rotation for
any desired portion of these 250 rotations.
The mapping of the desired positioning range to the physical positioning range is
done with the help of the parameter ‘upper mapping end’ (SDO #2028).
In the delivery state, the drive is at position 51200, the upper limit switch is set to
101200 and the lower limit switch is set to 1200, yielding a positioning range of ±125
rotations (±50000 increments). So if the desired positioning range doesn’t exceed
±125 rotations, in delivery state none of the following actions to adjust the positioning
range have to be taken.
For the realization of any desired positioning range independent of the possible
positioning range which is defined by the mounting situation (physical positioning
range) there are the following two possibilities:
1) Move the axle (for example a spindle) to the desired position, then move the drive
(with opened collar) to the position value which belongs to the physical position of
the axle, only then close the collar.
Examples:
a) Move the axle in middle position, then move the drive at no-load (with opened
collar) also to middle position (position 51200), then close the collar. The drive
is now capable of moving 125 rotations (±50000 increments by default) in each
direction.
b) Move the axle completely to the left (resp. bottom), then move the drive at no-
load (with opened collar) without loop to the lowest position (position 1200),
then close the collar. The drive is now capable of moving 250 rotations
(±100000 increments by default) to the right (resp. top).
c) Move the axle completely to the right (resp. top), then move the drive at no-load
(with opened collar) to the highest position (position 101200), then close the
collar. The drive is now capable of moving 250 rotations (±100000 increments
by default) to the left (resp. bottom).
Page 25

Instruction Manual PSx3xxC
25
2) Mount the drive in any position on the axle, close the collar, then adjust the
positioning range with the help of SDO #2028. SDO #2028 defines the upper end
of the positioning range. By default, the upper end is at +256 rotations (position
102400). If the positioning range doesn’t suit to the actual displayed position after
mounting the drive, the upper end of the positioning range can be adjusted
between -256 rotations and +512 rotations.
Examples:
a) After mounting the drive, the displayed position is 51200 (which corresponds
the delivery state). But the positioning range shall solely spread to the right
(resp. top) Set SDO #2028 to 152400.
b) After mounting the drive, the displayed position is 100000. But the positioning
range shall solely spread to the right (resp. top) Set SDO #2028 to 201200.
c) After mounting the drive, the displayed position is 2000. But the positioning
range shall solely spread to the left (resp. bottom) Set SDO #2028 to 3200.
Remarks:
1) When calculating the upper mapping end (SDO #2028), a security reserve of 3
rotations has to be kept in mind (1200 increments by default, see the examples
above), because the highest possible position value is 3 rotations below the upper
mapping end. The lowest possible position value is 253 rotations below the upper
mapping end.
2) The above given increment and position values relate to the following settings,
which correspond to the delivery state:
a) referencing value (SDO #2004) = 0
b) actual value assessment, numerator (SDO #2010) = 400
c) actual value assessment, denominator (SDO #2011) = 400
These 3 SDOs have an influence on the above given increment and position
values: With the help of the referencing value a shift can be reached, with the help
of the actual value assessment numerator and denominator a stretching or
distension can be reached (see below).
3) When changing the direction of rotation (SDO #202C), the referencing value (SDO
#2004), the upper mapping end (SDO #2028) and the upper and lower limit (SDO
#2016 and #2017) are set to delivery state.
4) When changing the upper mapping end (SDO #2028), the upper and lower limit
(SDO #2016 and #2017) are set to delivery state.
5) When changing the actual value assessment numerator or denominator (SDO
#2010 or #2011), the target value, the actual value, the referencing value, the
upper mapping end, the upper and lower limit, the positioning window and the
length of loop are re-calculated.
6) When changing the referencing value (SDO #2004), the target value, the actual
value, the upper mapping end and the upper and lower limit are re-calculated.
7) If the user wants to go over any automatic re-calculation of values when setting up
the device, the optimum order of transfering the parameter is the following:
a) direction of rotation (SDO #202C),
actual value assessment, numerator (SDO #2010),
actual value assessment, denominator (SDO #2011)
b) referencing value (SDO #2004)
c) upper mapping end (SDO #2028)
d) upper limit (SDO #2016),
lower limit (SDO #2017),
positioning window (SDO #2006),
length of loop (SDO #201F)
8) In order to save the settings permanently in the EEPROM, write 1 to SDO #204F.
As soon as reading of SDO #204F shows 0, the saving is finished.
Page 26

Instruction Manual PSx3xxC
26
Referencing value (SDO #2004):
The referencing process affects all transferred values, i.e., the target value, actual
value, upper mapping end and upper and lower limit.
There are two ways of setting the referencing value:
1) Directly, by writing the referencing value to SDO #2004.
2) Indirectly, by writing an actual value to SDO #2003. This makes it possible to
assign any “true” actual value to the current, physical actual value. The resulting
difference is then the referencing value. This value will immediately be included in
calculations for each transferred value and can also be read via SDO #2004.
When changing the referencing value, automatically the target value, the actual value,
the upper mapping end and the upper and lower limit are re-calculated.
The removal of the motor power supply has no affect on the internal
measuring system.
d) Using actual value assessment factors to set the spindle pitch
SDO #2010 (numerator factor) and #2011 (denominator factor) can be used to
represent any desired spindle pitch.
Both factors are set to a value of 400 by default, resulting in a resolution of 0.01 mm
at a spindle pitch of 4 mm.
The denominator factor serves as a simple means of setting the spindle pitch and
resolution.
The numerator factor is primarily used for setting "unlevel" resolutions.
Examples:
Spindle pitch
Resolution
Numerator
factor
Denominator
factor
4 mm
1/100 mm
400
400
1 mm
1/100 mm
400
100
2 mm
1/10 mm
400
20
Numerator and denominator factors may take on values between 1 and 10,000.
e) Drag error
During a positioning run, the device compares the computed target position with the
current actual value. If the difference is larger than the ‘drag error’ value (SDO
#2005), the device sets the corresponding bit in the status word. This situation is
especially likely to occur if external factors (required torque, voltage to motor too low)
prevent the device from achieving the target rpm.
f) Abort run when the master fails
If the connection to the master is interrupted during a positioning run, the master
cannot abort an actual run. There are two ways of generating an automatic run abort
in a case like this: node guarding und heartbeat consumer.
Page 27

Instruction Manual PSx3xxC
27
In the first case (node guarding), guard time and life time factors must be
programmed into the drive. The master then must cyclically transmit the heartbeat to
the drive as a remote object.
In the second case (heartbeat consumer), node ID and cycle time of the master
heartbeat must be sent to the device as consumer heartbeat. The master must then
cyclically transmit this heartbeat.
The second option generates less bus load, because the master only need to transmit
an unconfirmed master heartbeat (only one message for all consumers).
g) Optional: Manual run using external keys (jog key mode)
A manual run can be performed using external keys under the following conditions:
1) when CAN bus is not connected:
- if the address 0 or 1 is set with the help of the address switches
OR
- if SDO #204C has been set to 1 at last
2) when CAN bus is connected:
- if in the control word bit 5 is active (‘release for jog key mode’) and bit 4 is
inactive (‘release for positioning by bus’)
OR
- if SDO #204C has been set to 1 and CANopen state is ‘preoperational’
Altogether there’s the following assignment:
CAN bus
connected
address
SDO
#204C
CANopen
state
control
word
bit 4
control
word
bit 5
external
keys
no
0..1 X X X X
active
no
> 1 0 X X X
inactive
no
X 1 X X X
active
yes
X 0 X X 0
inactive
yes
X 0 X 1 X
inactive
yes
X X X 0 1
active
yes
X 1 operational
X
0
inactive
yes
X 1 operational
1
X
inactive
yes
X
1
preoperational
X X active
Bit 5 (‘release for jog key mode’) and bit 4 (‘release for positioning by bus’) cannot be
set simultaneously. Changing the release while running (for example from jog key
mode to positioning by bus) aborts a run in the other operation mode. Exception: If
SDO #204C has been set to 1 and the CANopen state is ‘preoperational’, bits 5 and 4
are without meaning.
The operator can adjust the number of increments for a single step via SDO #2022.
The single step is being executed if one of the external keys is being pressed. If the
external key has been released before the end of the single step, it will be completed
nevertheless. If the external key stays pressed further on, after a short waiting time a
continuous manual run might join the single step under some circumstances. This
continuous manual run will run as long as the external key stays pressed. The
continuation of a single step with a manual run is always enabled if the CAN bus is
not active. If the CAN bus is active, additionnally to bit 5 of the control word also bit 3
(‘release for manual run in jog key mode’) has to be activated. If bit 3 is not set, each
pressing of the external key results in a single step, even if the key is pressed longer
than the duration of the single step. If SDO #204C has been set to 1 and the
Page 28

Instruction Manual PSx3xxC
28
CANopen state is ‘preoperational’, bit 3 of the control word is without meaning. The
continuous manual run is always enabled under these conditions.
The idle period before the drive switches into manual run is specified in SDO #2023.
In manual run the drive runs maximum to the specified limit switch position (SDO
#2016 or #2017).
If during an jog run both external keys are pressed, the run is aborted immediately. A
new jog run is only possible if both keys are released.
To prepare the function of the external keys, the corresponding key contact (pin 2 or 3
of the 4-pin plug) must be connected with +24V (pin 1). If the key signal is generated
by a voltage source which is galvanically separated from the internal voltage source
of the drive, GND (pin 4) must be connected.
Jog runs without external keys:
Jog runs are also possible without external keys. For this purpose bit 8 (‘jog run to
larger values’) and bit 9 (‘jog run to smaller values’) are provided, these bits simulate
the pressing of the corresponding external keys.
Requirements:
- Bits 4 and 5 of the control word have to be reset.
AND
- SDO #204C must be set to 0 or the CANopen state is not ‘preoperational’.
h) Devices with optional holding brake
The device models PSx30xC-14, PSx31xC-14, PSx32xC and PSx33xC can be
supplied with an optional holding brake. This brake prevents the output shaft from
turning when the power supply to the motor is removed, or, if the motor holding torque
is too low, to a maximum of the level of the nominal torque. A small degree of rotation
always occurs at the output, i.e. the brake cannot be used to hold the drive at a
defined position (for this purpose where appropriate the holding torque might be
increased with the help of SDO #202B and SDO #2042).
To release the brake when a run command is transmitted, these devices first wait for
a short time (by default 0.15 sec before beginning the run, SDO #2044) and then run
a few increments against the actual direction of movement (number of increments:
SDO #2048). The brake is closing at the end of every run (by default 1 sec after the
end of the run, SDO #2045). The advantage of this feature is, that in case of many
subsequent runs the brake has not to be released anew each time.
To adjust the position of the drive manually, it is first necessary to remove the rubberplug in the top cover (see drawings at the end of these instructions). Then release the
brake by pressing down and simultaneously turning using a hex wrench NW3
(PSx31xC and PSx33xC) or NW4 (PSx30xC and PSx32xC).
i) Devices with optional friction brake
The device model PSE34xxC can be supplied with an optional friction brake. This
brake prevents the output shaft from turning when the power supply to the motor is
removed, or, if the motor holding torque is too low.
A run command is not approached immediately but only after a short idle period to
tighten the brake.
Page 29

Instruction Manual PSx3xxC
29
The brake releases at the end of every run.
To adjust the drive manually, it is first necessary to remove the corresponding rubber-
plug in the top cover (see drawings at the end of these instructions). The drive can
then be rotated using a hex wrench NW4. This is quite difficult as the operator has to
overcome both any torque present at the output and the force of the friction brake.
j) Reference runs
The PSx3xxC positioning system is equipped with an absolute measuring system,
therefore there’s no need for a reference run when powering on the drive. However, if
in certain cases a reference run onto a hard block should be desired (e.g. uniquely
when installing the drive at a machine), the course of action should be the following:
1) Before commanding the reference run the following settings have to be carried
out:
- set the maximum torque (SDO #2014) and the maximum start-up torque
(SDO #2018) to max. 10% of the nominal torque
- set the maximum holding torque (SDO #202B) and the maximum holding
torque at end of run (SDO #2042) to 0
- set the rpm limit for aborting run (SDO #201A) to 60
- set the time elapsed until speed falls below rpm limit for aborting run (SDO
#201B) to 100
(The span of time in which the drive trys to get over the block, decreases:
With the reduced values the positioning will be aborted if the speed stays
below 60% of the target speed for longer than 100ms. By default, these
values are 30% and 200ms.)
- set the corresponding upper and lower limit (SDO #2016 or #2017) in a way
that the block location lays considerable within the area between the upper
and lower limit
(Otherwise there’s the danger that the block is located within the positioning
window and consequently won’t be recognized.)
- Where appropriate, reduce the target speed for manual run (SDO #2013).
2) Now start the reference run as manual run (set bit 0 or 1 in the control word).
3) Wait for the drive moving (bit 6 in the status word is set).
4) Wait for the drive has stopped and a positioning error has appeared (bit 6 in the
status word is cleared, bit 10 is set).
5) Start a manual run in the opposite direction with the same settings (move a
certain distance away from the hard stop in order the drive can move freely).
6) Only now adjust the desired settings of the adove mentioned SDOs for normal
operation.
Page 30

Instruction Manual PSx3xxC
30
5 Technical Data
Ambient conditions
ambient temperature
0 °C to +45 °C
storage temperature
-10 °C to +70 °C
shock resistance according to
DIN IEC 68-2-27
50 g 11 msec
resistance to vibration
according to DIN IEC 68-2-6
10 Hz to 55 Hz 1.5 mm
55 Hz to 1000 Hz 10 g
10 Hz to 2000 Hz 5 g
EMC standards
CE
conformity
CE declaration of conformity available upon request
protection class
PSE
IP 54
PSS
IP 65
PSW
IP 66 (in operation)
IP 68 (at standstill)
duty cycle
Device model
Duty cycle in %
Base time in sec.
PSE34xx
PSE30xx to 33xx
PSS
PSW
20
30
20
20
300
300
600
600
Electrical data
nominal power output
PSx30xC, PSx31xC,
PSE31xxC
25 W with 30 % duty cycle
PSx32xC, PSx33xC,
PSE32xxC, PSE33xxC
35 W with 30 % duty cycle
PSE34xxC
100 W with 20 % duty cycle
supply voltage
24 VDC ±10 % (supply voltages for motor and control
unit are galvanically isolated)
advice: use regulated power supplys
nominal current, control unit
0,1 A
nominal current, motor
PSx30xC, PSx31xC,
PSE31xxC
2,2 A
PSx32xC, PSx33xC,
PSE32xxC, PSE33xxC
3,0 A
PSE34xxC
7,8 A
positioning resolution
0,9°
positioning accuracy
0,9°
CAN protocol
CANOpen (CiA DS 301)
CAN address setting via decade switch:
addresses 1...99
CAN address setting via bus:
addresses 1...127
baud rate setting via sliding switch:
125 kBaud, 250 kBaud, 500 kBaud
baud rate setting via bus:
additionally 50 kBaud und 1000 kBaud
absolute value acquisition
optical - magnetic
Page 31

Instruction Manual PSx3xxC
31
Physical data
positioning range
250 usable rotations, no mechanical limits
measuring system has a span of 256 turns, minus 3
turns security stock at upper and lower range limit
spindle lash compensation
automatic loop after every positioning run (may be
deactivated)
output shaft
PSE30xC-8
PSE31xC-8
8H9 hollow shaft with
adjustable collar
PSE30xC-14,
PSE31xC-14, PSE32xC,
PSE33xC
14H7 hollow shaft with
adjustable collar
PSE31xxC,
PSE32xxC,
PSE33xxC,
PSE34xxC
14H7 hollow shaft with
clamp and feather key
PSS3xxC-8
PSW3xxC-8
8H9 hollow shaft with
adj. collar or
8h8 solid shaft
PSS3xxC-14
PSW3xxC-14
14H7 hollow shaft with
adj. collar or
14h8 solid shaft
recommended diameter
of the spindle head
according to the hollow shaft diameter with an
interference fit of h9
maximum radial force
40 N
maximum axial force
20 N
dimensions (l x w x h)
see catalog data on our website
weight (approx.)
PSx30xC-8
650 g
PSx30xC-14, PSx32xC
1200 g
PSx31xC-8
700 g
PSx31xC-14, PSx33xC
700 g
PSE31xxC
1200 g
PSE32xxC
1350 g
PSE33xxC
1350 g
PSE34xxC
1900 g
For additional specifications and dimension drawings, please visit our website at
http://www.halstrup-walcher.de/en/produkte/positioniertechnik/positioniersysteme/index.php
7100.004224L_PSx3xxC.doc 03/2017 Ka
Page 32

Instruction Manual PSx3xxC
32
 Loading...
Loading...