

GWAN HSIAN GHS-V8 Instruction Manual

GWAN HSIAN
Inverter
GHS-V8
Instruction Manual
(SENSORLESS VECTOR)
220VClass 3φ 3~60Hp
440VClass 3φ 1~60Hp
Please hand this manual to the end-users. in order to let the inverter to function best.
Thank you.
Preface
Thank your so much to adopt the GHS-V8 multi-function IGBT inverter
GHS-V8 series (hereafter referred as GHS-8V).
GHS-V8 series of general-purpose inverters provide V/f and vector
control as standard features with user-friendly operation. They are the
high-end work of modern power electronics and electro-mechanic drive
technology. Please read this instruction before attempting to install,
operate, maintain, or inspect a GHS-V8 inverter. It is recommended to
keep this manual in secure and convenient place for any future reference.
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
1
■ "WARNING" or “ CAUTION"
DANGER!
1. Be sure to turn off the main circuit power before any wiring work is to conduct.
2. Do not touch the circuit or replace any component right after turning off the power
source until the "CHARGE" LED off because of the high voltage still in the
converter. (LED “Charge" lamp indicates that there is still some charge in the
capacitor)
3. Never connect the output terminals U, V, W to AC power supply by mistake.
4. Only authorized personnel should be permitted to perform maintenance, inspections or
parts replacement.
5. Always connect the ground lead E to ground.
6. Never apply high voltage test directly to the components within the inverter. (The
semiconductor devices are vulnerable to high voltage shock).
WARNING
1. Install a (or more) cooling fan to keep the temperature below 45 ℃, when
mounting the inverter in enclosure.
2. Never apply high voltage test directly to the components within the inverter. (The
semiconductor devices are vulnerable to high voltage shock).
3. The CMOS IC on the control board is vulnerable to Electro-Static Discharge. Do not
try to touch the control board.
4. All the parameters of the inverter have been preset at the factory. Do not change the
settings unnecessarily except the case of special application.
CAUTION
1. Prior to installation, operation, and maintenance, read this manual thoroughly and make sure to be
proceeded by qualified professional personnel.
2. Verify if the model types is same as your expectation.
3. Do not install the converter with any damage or missing part.
4. Each inverter shall be attached with QC marking. Do not install the inverter without QC marking.
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
2
Table Of Contents
1. GHS-V8 Handling Description --------------------------------------------------------------------------3
1.1 Inspection Procedure upon eceiving---------------------------------------------------------------------3
1.2 Installation Orientation and pace-------------------------------------------------------------------------4
3 Checking and Controlling the Installation Site-----------------------------------------------------------4
1.4 Stock Site (or warehouse) otice---------------------------------------------------------------------------4
1.5 GHS-V8 Inverter Standard
Specification----------------------------------------------------------------5
1.6 Exterior and Mounting imensions------------------------------------------------------------------------7
2. Wiring---------------------------------------------------------------------------------------------------------9
2-1 Standard Connection Diagram--------------------------------------------------------------------------- 9
2-2 Wiring Main Circuit Terminals and Control Circuit T erm inals-------------------------------------10
2-3 Wiring between Inverter and Peripheral Devices ----------------------------------------------------12
2-4 Wiring Peripheral Units compatible to main circuit and their precaution items-----------------14
3. Using the LCD Digital Operator-------------------------------------------------------------------------17
3.1 Functions of LCD Digital Operator--------------------------------------------------------------------17
4. Parameter Setting-----------------------------------------------------------------------------------------23
4.1 Frequency Command An- ---------------------------------------------------------------------23
4.2 Parameters That Can be Changed during Running Bn- ----------------------------------24
4.3 Control Parameters Cn- -----------------------------------------------------------------------31
4.4 System Parameters Sn- -------------------------------------------------------------------------72
4.5 Monitoring Parameters Un- -------------------------------------------------------------------89
5. Fault Display and Troubleshooting--------------------------------------------------------------------92
5.1 Error Message and Troubleshooting--------------------------------------------------------------------96
6. Appendix
6.1 List of braking resistor and braking detection module----------------------------------------------96
6.2 AC Reactor-----------------------------------------------------------------------------------------------97
6.3 Noise filter List------------------------------------------------------------------------------------------98
6.4 Physical dimension of digital operator---------------------------------------------------------------100
6.5 LCD Digital Operator Display, Language Selection and Parameter Copy Function setting-101
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
3
1.GHS-V8 Handing Description
1-1 Inspection Procedure upon Receiving
Before delivery, every MA7200 inverter has been properly adjusted and has passed a demanding factory
test. After receiving the MA7200 inverter, the customer should follow the procedures listed below:
Verify that the Model Number of the inverter you have received is the same as the Model Number
listed on your purchase order. (Please read the Nameplate)
Observe the condition of the shipping container and report any damage immediately to the
commercial carrier that delivered your inverter.
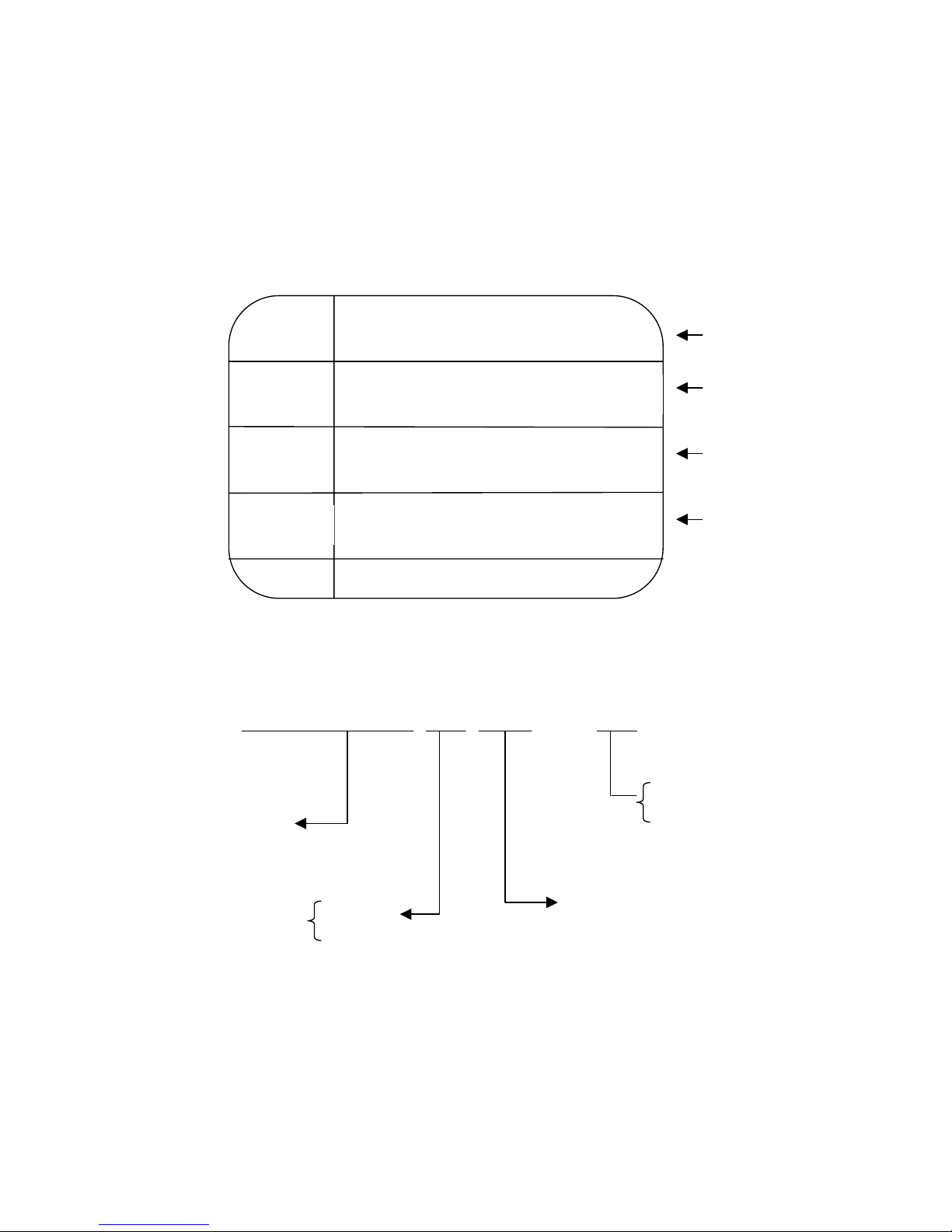
▓ Inverter Nameplate:
▓Inverter Model Number:
GHS-V8-L 0P7 C
GHS-V8
Series
Operator T ypes:
E:LED Operator
C:LCD Operator
Capacity (KW)
0P7 0.75KW
1P5 1.5KW
2P2 2.2KW
3P7 3.7KW
5P5 5..5KW
Rated Voltage
L:220V
H:440V
MODE
GHS-V8-L0P7C
INPUT
AC3PH,200~230V,50/60Hz,6.0 A
OUTPUT
AC3PH,0~230V,0~400Hz,
9KVA,5.0A
SER.NO.
12345
Output
Specification
Input
Specification
Model No,.
Series No.
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
4
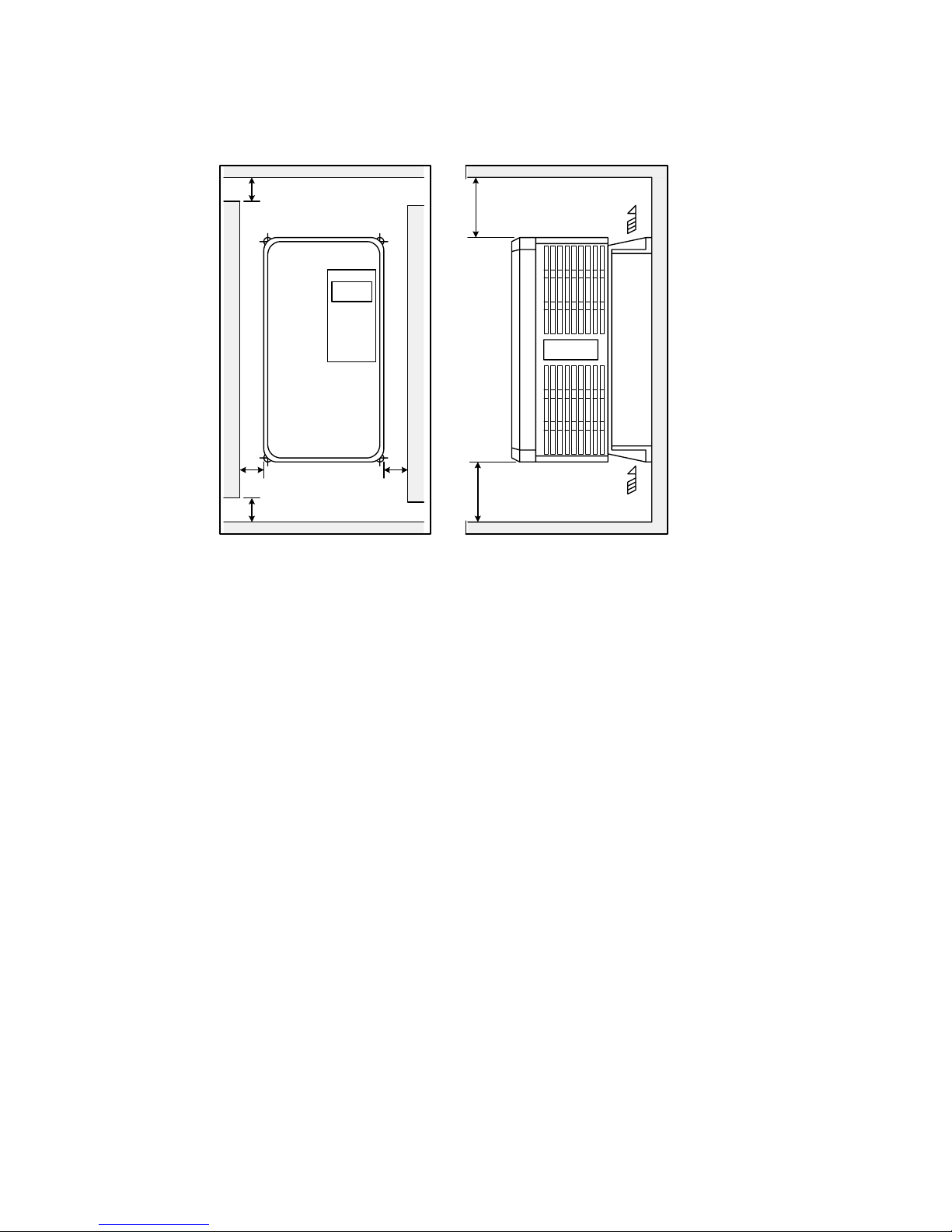
1-2 Installation Orientation and Space
When installing the inverter GHS-V8, always provide the following installation space to allow
normal heat dissipation.
50 mm min.
30 mm min. 30 mm min.
50 mm 以上
(Inlet temp)
-10 ~ + 40 ℃
air
air
120 mm min.
120 mm min.
(a) Horizontal space (b) Vertical space
Figure 1 GHS-V8 Installation orientation and Space
1-3 Checking and Controlling the Installation Site
It is important for the installation site of inverter to achieve proper performance and normal
operating life. Followings are the conditions need to be considered.
Ambient temperature: -10℃ ~ +40 ℃
Free from rain, moisture, and direct sunlight.
Free from harmful mist, gases, liquids, dusts and metallic powder.
Free from excessive oscillation and electromagnetic noise.
If more than 1 inverter are installed in a box, be sure to add a cooling fan or air
conditioner to maintain the air temperature below +45℃。
1-4 Stock Site (or warehouse) Notice:
The inverter, when not used, must be properly placed in the clean location where has or is
free from oil mist and dust
Ambient temperature :-20 to +60
o
C
relative humidity below 90% RH with no condensation
free from harmful mists, gases, liquids, airborne dusts and metallic particles.
properly packaged on the on the case or table above the ground
not in direct sunlight
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
5
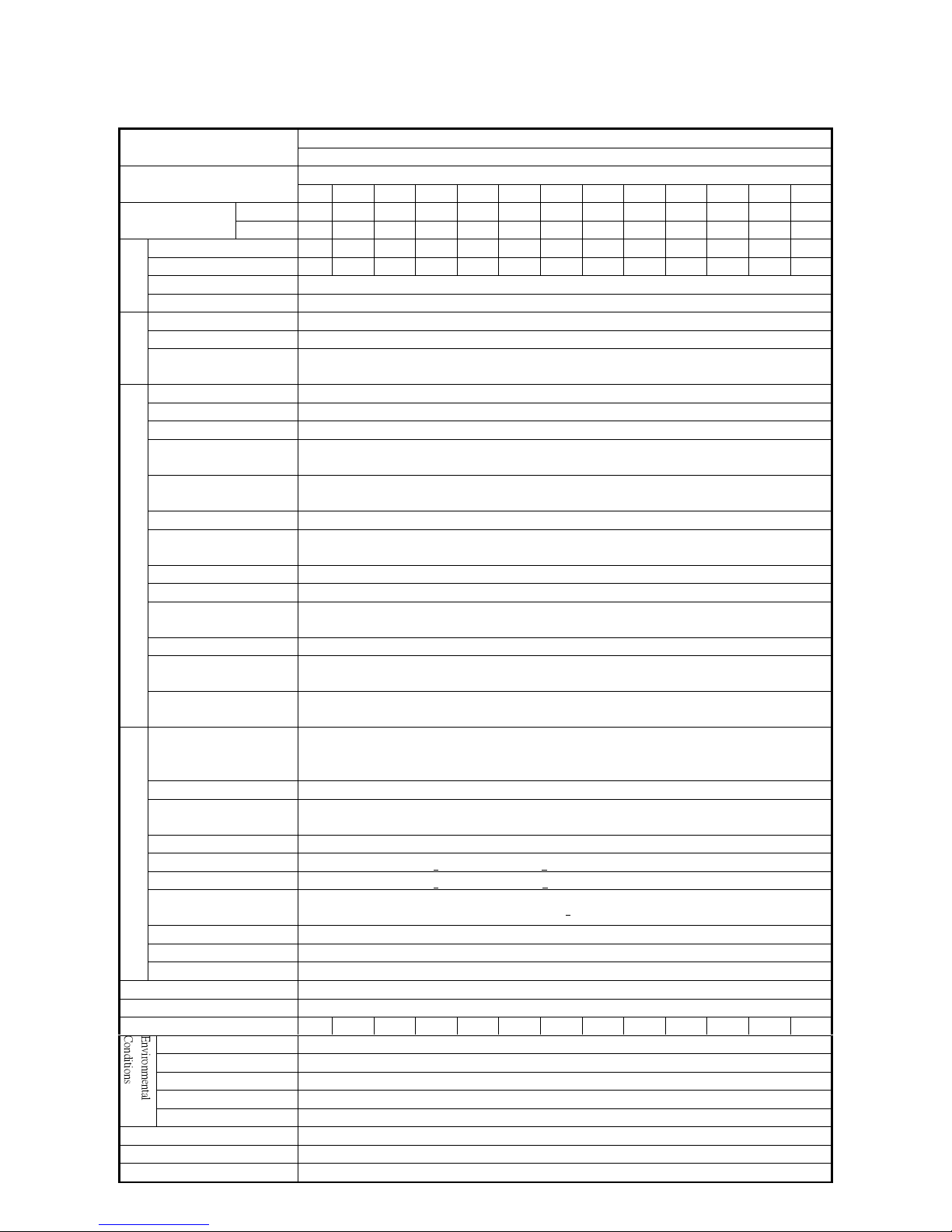
1-5 GHS-V8 Inverter Standard Specification
There are 2 voltage class types: 220V class and 440V class.
220V Class
Input Voltage Class
3 phase
GHS-V8-
MODEL
0P7 1P5 2P2 3P7 5P5 7P5 011 015 018 022 030 037 045
HP 1 2 3 5 7.5 10 15 20 25 30 40 50 60 Max. Applicable Motor
Output (CT)
*
kW 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45
Rated Output Capacity (kVA) 4 7.5 10.1 13.7 20.6 27.4 34 41 54 68 78
Rated Output Current (A)
*
9.6 17.5 24 32 48 64 80 96 130 160 183
Max. Output Voltage (V) 3 phase 200~230V
Output
Power
Max. Output frequency(Hz) Through parameter setting ( 0 Hz to 400Hz)
Rated Voltage, Frequency 3 Phase 200V~230V, 50/60Hz
Allowable Voltage Fluctuation -15% ~ +10%
Power Source
Allowable Frequency
Fluctuation
±5%
Operation Mode LED operator or LCD operator。
Control Mode Sinusoidal PWM
Frequency Control Range 0.5Hz~400Hz
Frequency Accuracy
(varied with temperature)
Digital Command: ±
0.01%(-10 ~ +40℃)
Analog Command:
± 0.1%, (25±
10ºC)
Frequency Command
Resolution
Digital Command: 0.01Hz Analog Command: 0.06Hz/60Hz
Frequency Output Resolution 0.01Hz
Overload Resistibility
(constant torque)150% Rated Current for 60 sec;
(varied torque) 120% rated Current for 60 sec
Frequency Setting Signal DC 0 ~ +10V / 4 ~ 20mA
Acc./Dec. Time 0.0 to 6000 Seconds (Independent Accel/Decel Time Settings)
Voltage-Frequency
Characteristics
Adaptable V/f through parameter setting
Regeneration Torque 100%,2%ED,5 秒
Main Control Function
Auto Torque Boost, Slip Compensation, Restart After Momentary Power Loss, Energy-Saving, PID Control, RS-485
Communication, Simple PLC Function, Sensorless Vector Control
Control Characteristics
Extra Function
Up/Down Operation, 4 Different Sets of Fault Status Record (Including Latest One), Cumulative Power On &
Operation Hour Memory, Energy Savings Function, MODBUS Communication, Multiple-Pulse Output Ports, etc.
Stall Prevention
During Acceleration/Deceleration and Constant Speed Operation
(Current Level can be Selected During Acceleration and Constant Speed Operation. During Deceleration, Stall
Prevention can be Enabled or Disabled)
Instantaneous Overcurrent (OC) 200% of Rated Output Current
Inverter overloads
Protection(OL2)
Motor Coasts to Stop after 1 Minute at 150% Rated Output Current
Motor Overload (OL1) Electronic Overload Protection
Over voltage(OV) Motor Coasts to Stop if VDC > 410V (230V) or VDC > 820V (460V)
Low voltage(UV) Motor Coasts to Stop if VDC < 200V (230V) or VDC < 400V (460V)
Momentary Power Loss
Ride-Through time
Motor Coasts to Stop after Momentary Power Loss Lasting
>
15ms
Overheat (OH) Protection by Thermistor
Grounding Protection (GF) Protection by the DC Current Sensor
Protection Function
Charge Indication Lit when the DC Bus Voltage ≧50V
Mechanical Construction Enclosed, Wall-Mounted Type (NEMA-1)
Cooling Forced
Weight(kg) 7.1 7.1 13.1 13.1
Location Indoor (Protected from Corrosive Gases and Dust)
Ambient Temperature +14 to 104oF, -10 to +40ºC (Not Frozen)
Storage Temperature -4 to 140oF, -20 to +60ºC
Humidity Below 90%RH (Non-Condensing)
E
n
v
i
r
o
n
m
e
n
t
a
l
C
o
n
d
i
t
i
o
n
s
Altitude, Vibration Below 3300ft. (1000m), 5.9m/S2 (0.6G), (JISC0911 Standard)
Communication Function RS-485 Installed (MODBUS Protocol)
EMI Meets EN50081-2 (1994) With TECO Specified EMI Filter
EMC Compatibility Meets Pr EN50082-2
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
6
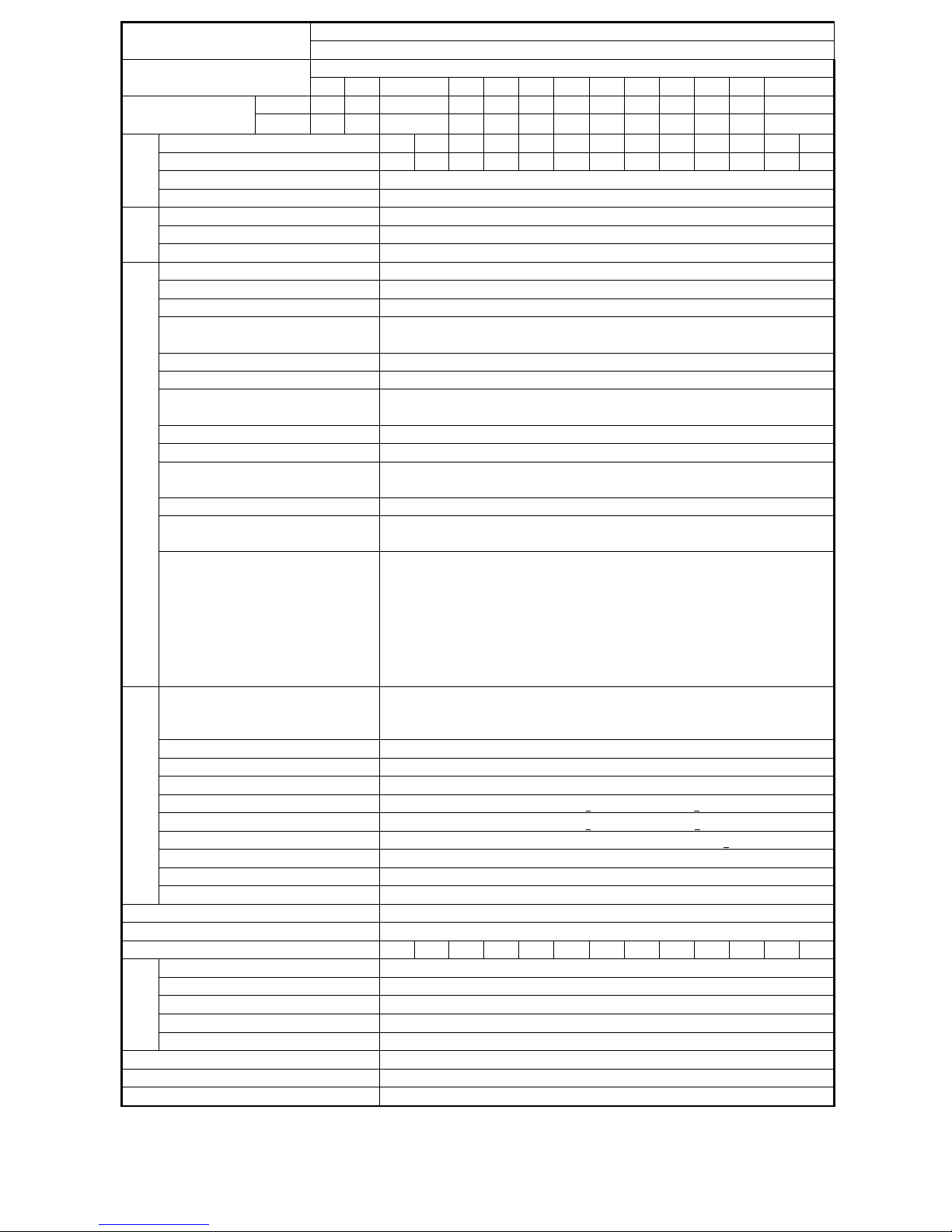
440V Class
Input Voltage Class
3 phase
GHS-V8-
MODEL
0P7 1P5 2P2 3P7 5P5 7P5 011 015 018 022 030 037 045
HP 1 2 3 5 7.5 10 15 20 25 30 40 50 60
Max. Applicable
Motor Output (CT)
*
kW
0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45
Rated Output Capacity (kVA) 2.1 2.7 4 7.5 10.1 13.7 20.6 27.4 34 41 54 68 82
Rated Output Current (A)
*
2.6 4.0 4.8 8 12 16 24 32 40 48 64 80 196
Max. Output Voltage (V) 3 phase 200~230V
Output Power
Max. Output frequency(Hz) Through parameter setting ( 0 Hz to 400Hz)
Rated Voltage, Frequency 3 Phase 200V~230V, 50/60Hz
Allowable Voltage Fluctuation -15% ~ +10%
Power
Source
Allowable Frequency Fluctuation ±5%
Operation Mode LED operator or LCD operator。
Control Mode Sinusoidal PWM
Frequency Control Range 0.5Hz~400Hz
Frequency Accuracy
(varied with temperature)
Digital Command: ±
0.01%(-10 ~ +40℃)
Analog Command:
± 0.1%, (25±
10ºC)
Frequency Command Resolution Digital Command: 0.01Hz Analog Command: 0.06Hz/60Hz
Frequency Output Resolution 0.01Hz
Overload Resistibility
(constant torque)150% Rated Current for 60 sec;
(varied torque) 120% rated Current for 60 sec
Frequency Setting Signal DC 0 ~ +10V / 4 ~ 20mA
Acc./Dec. Time 0.0 to 6000 Seconds (Independent Accel/Decel Time Settings)
Voltage-Frequency
Characteristics
Adaptable V/f through parameter setting
Regeneration Torque 100%,2%ED,5 秒
Main Control Function
Auto Torque Boost, Slip Compensation, Restart After Momentary Power Loss, Energy-Saving, PID
Control, RS-485 Communication, Simple PLC Function, Sensorless Vector Control
Control Characteristics
Extra Function
Up/Down Operation, 4 Different Sets of Fault Status Record (Including Latest One), Cumulative
Power On & Operation Hour Memory, Energy Savings Function, MODBUS Communication,
Multiple-Pulse Output Ports, etc.
Stall Prevention
During Acceleration/Deceleration and Constant Speed Operation
(Current Level can be Selected During Acceleration and Constant Speed Operation. During
Deceleration, Stall Prevention can be Enabled or Disabled)
Instantaneous Overcurrent (OC) 200% of Rated Output Current
Inverter overloads Protection(OL2) Motor Coasts to Stop after 1 Minute at 150% Rated Output Current
Motor Overload (OL1) Electronic Overload Protection
Over voltage(OV) Motor Coasts to Stop if VDC > 410V (230V) or VDC > 820V (460V)
Low voltage(UV) Motor Coasts to Stop if VDC < 200V (230V) or VDC < 400V (460V)
Momentary Power Loss Ride-Through time Motor Coasts to Stop after Momentary Power Loss Lasting > 15ms
Overheat (OH) Protection by Thermistor
Grounding Protection (GF) Protection by the DC Current Sensor
Protection Function
Charge Indication Lit when the DC Bus Voltage ≧50V
Mechanical Construction Enclosed, Wall-Mounted Type (NEMA-1)
Cooling Forced
Weight(kg) 7.1 7.1 13.1 13.1
Location Indoor (Protected from Corrosive Gases and Dust)
Ambient Temperature +14 to 104oF, -10 to +40ºC (Not Frozen)
Storage Temperature -4 to 140oF, -20 to +60ºC
Humidity Below 90%RH (Non-Condensing)
Environmental
Conditions
Altitude, Vibration Below 3300ft. (1000m), 5.9m/S2 (0.6G), (JISC0911 Standard)
Communication Function RS-485 Installed (MODBUS Protocol)
EMI Meets EN50081-2 (1994) With TECO Specified EMI Filter
EMC Compatibility Meets Pr EN50082-2
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
7
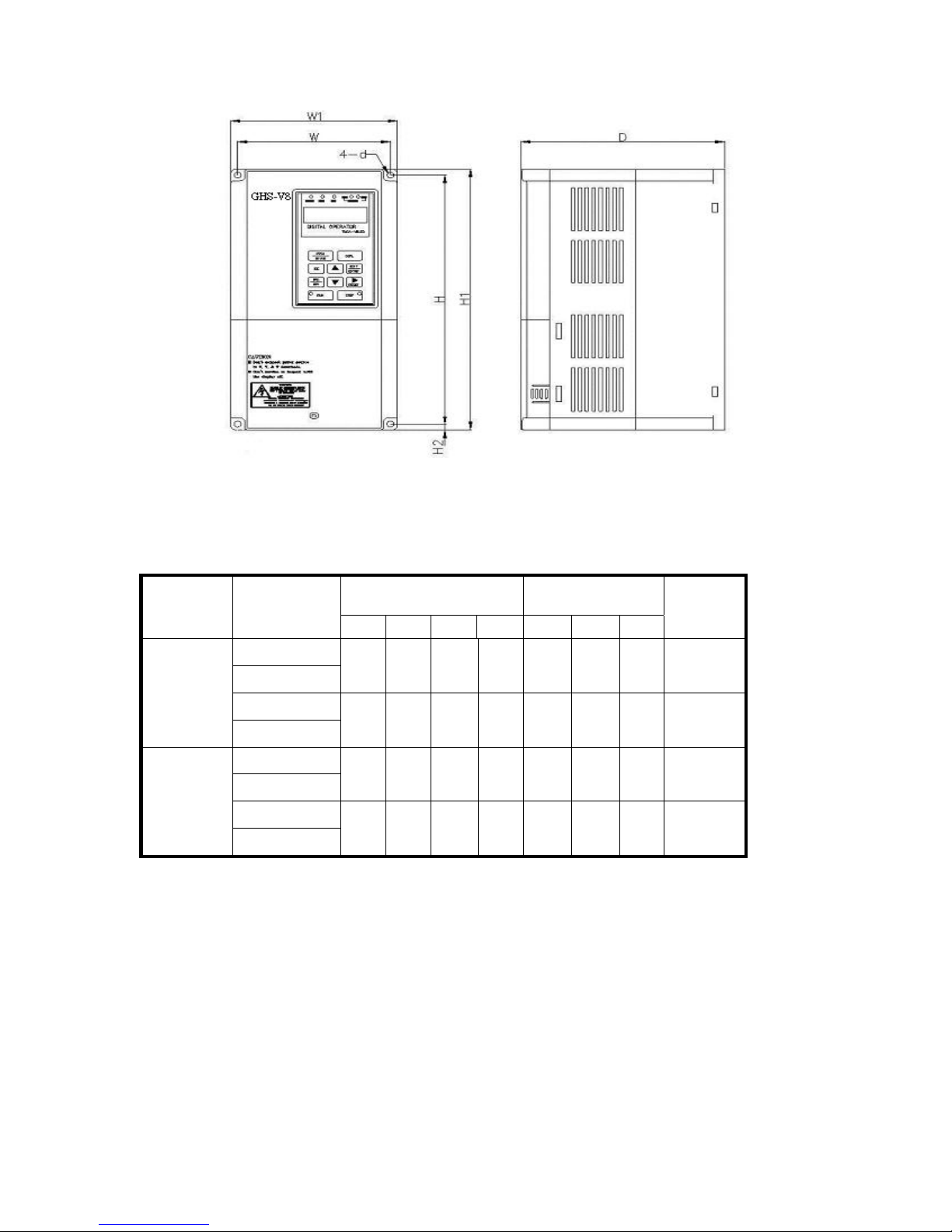
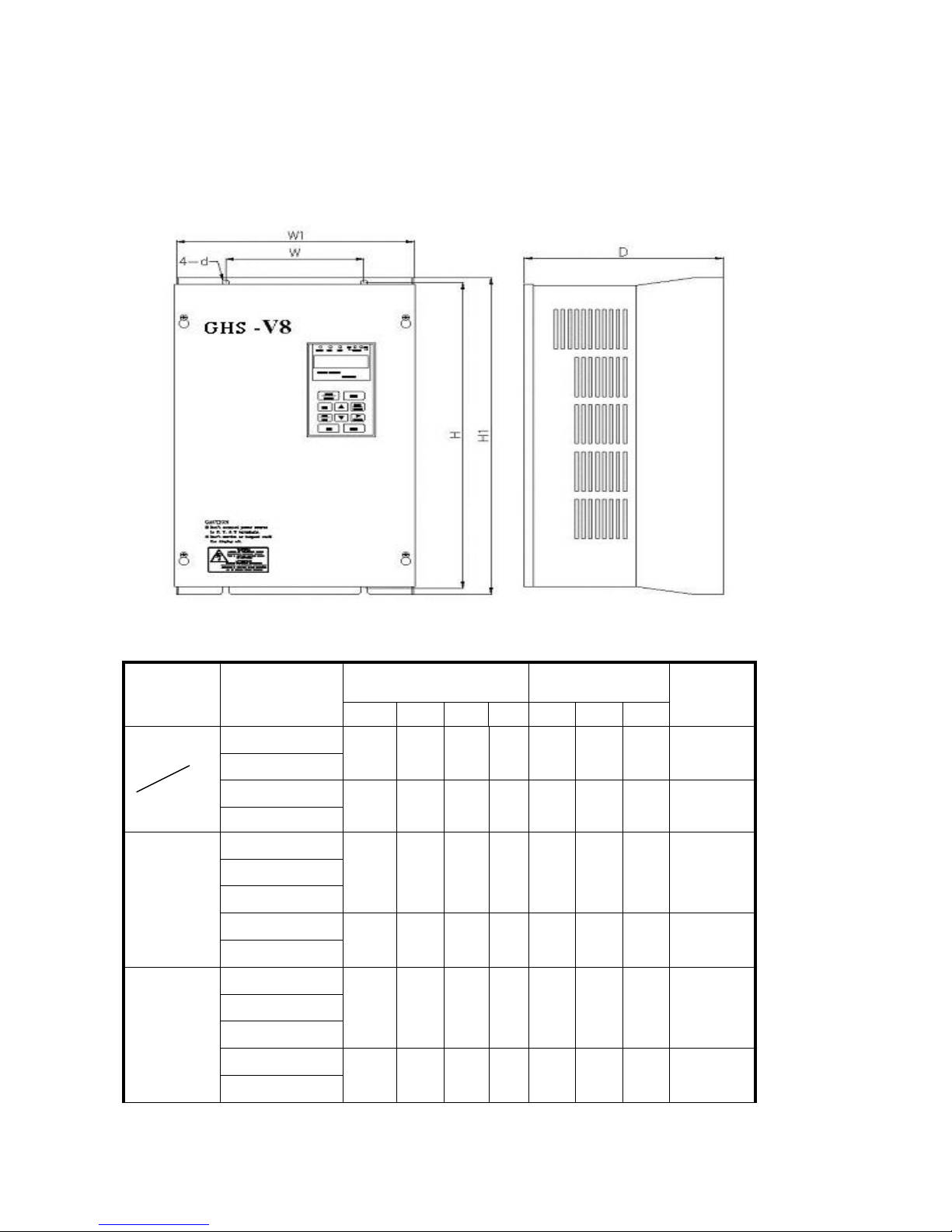
1- 6 Dimension
(A) Standard dimension: 220V/440V 1-5HP
Figure 2(A)
Mounting
Dimensions (in.)
External Dimensions
(in.)
Vol tage
Max. Applicable
Motor Output
(HP)/KW
W H H2 D W1 H1 D
Approx.
Mass
(lbs.)
/(kg)
1HP╱0.75KW
2HP╱1.5KW
3HP╱2.2KW
220V
3ψ
5HP╱3.7KW
133 260 6 5 145 273 170 3.2
1HP╱0.75KW
2HP╱1.5KW
133 260 6 5 145 273 170 3.2
3HP╱2.2KW
440V
3ψ
5HP╱3.7KW
133 260 6 5 145 273 170 3.2
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
8
Figure 2(B)
Mounting
Dimensions (in.)
External Dimensions
(in.)
Vo ltage
Max. Applicable
Motor Output
(HP)/KW
W H H2 d W1 H1 D
Approx.
Mass
(lbs.)
/(kg)
7.5HP/5.5KW
10HP/7.5KW
120 300 7.5 7 204 315 196 7.1
15HP/11KW
220V
440V
3ψ
20HP/15KW
140 394 8 8 244 410 202 13.1
25HP/18.5KW
30HP/22KW
40HP/30KW
50HP/37KW
220V
3ψ
60HP/45KW
25HP/18.5KW
30HP/22KW
40HP/30KW
50HP/37KW
440V
3ψ
60HP/45KW
(B) 220V/440V 5.5KW above
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
9
2 wgring
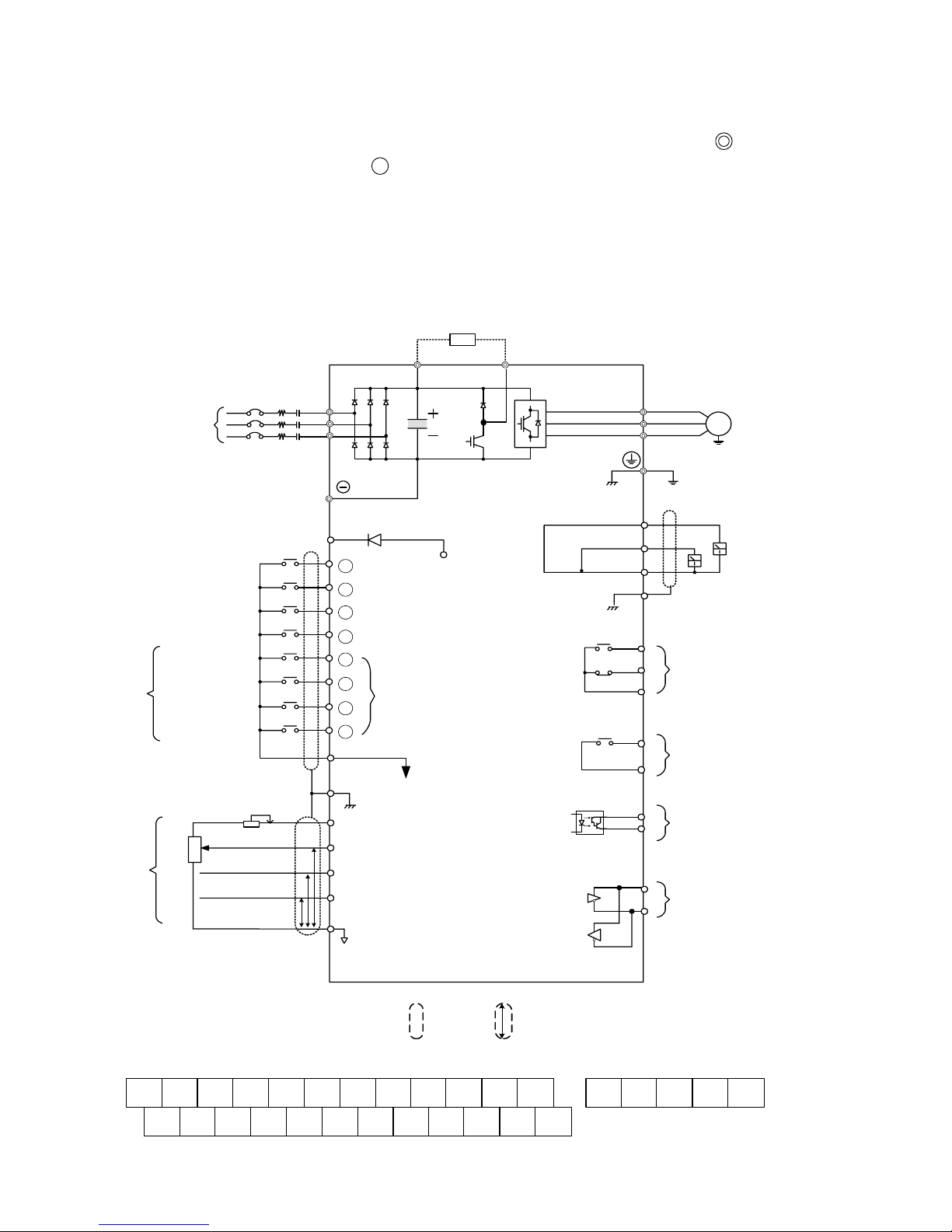
2-1 Standard Connection Diagram
The standard connection diagram of GHS-V8 is shown in Figure 3. The sign indicates the
power circuit terminal and the sign indicates control circuit terminal. The terminal arrangement for
inverter (<15kW) is shown below.
P/B1
B2
Braking Resistor
R
S
T
MCB
1
2
3
4
5
6
7
8
Multi-Function
Contact Input
NFB
Shield Sheath
E
GND Analog Signal
Common
24VG Sink Common
+12V Power Supply for
Speed Reference
(+12V, 20 mA max. )
AIN Master Speed
Reference
2KΩ, 1 /2 W
VIN Master Speed
Reference
( 20KΩ )
AUX Multi-Function
Analog Input
2KΩ
1/2W
FWD/Stop
REV/Stop
External Fault
Fault Reset
Multi-Step
Speed Reference1
Jog Command
External BaseBlock
Factory Preset
External Frequency Command
P
P
P
0 ~ +10V
4 ~ 20 mA
0 ~ +10V
0V
( 250Ω )
P
AO1
V
W
IM
Grounding Lead (<100 Ω)
GND
AO2
R1A
R1
B
R1
C
Multi-Function Contact Output 1
(250V AC, <1A
30V DC, <1A)
DO1
DOG
Multi-Function Output 1
(OPEN COLLECTOR 48V,
50mA)
RS-485 Communication Port
S(+)
S(-)
Analog Monitor 1, 2
(DC 0 ~ 10 V)
U
Power
Source
Shielded wire Shielded Twisted Wire
Note:
R2A
R2
C
Multi-Function Contact Output 2
(250V AC, <1A
30V DC, <1A )
(20KΩ )
Analog Output 1
E
+24V Source Common
+24V
Multi-Step
Speed Reference2
Analog Output 2
1 2 3
4
5 6 7 8
AO1 GND DO1 S(+) R1A R1B R1C R2A R2C
E 24V 24VG +12V AIN VIN AUX AO2 GND DOG E S(-)
Figure 3:GHS-V8standard connection diagram
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
10
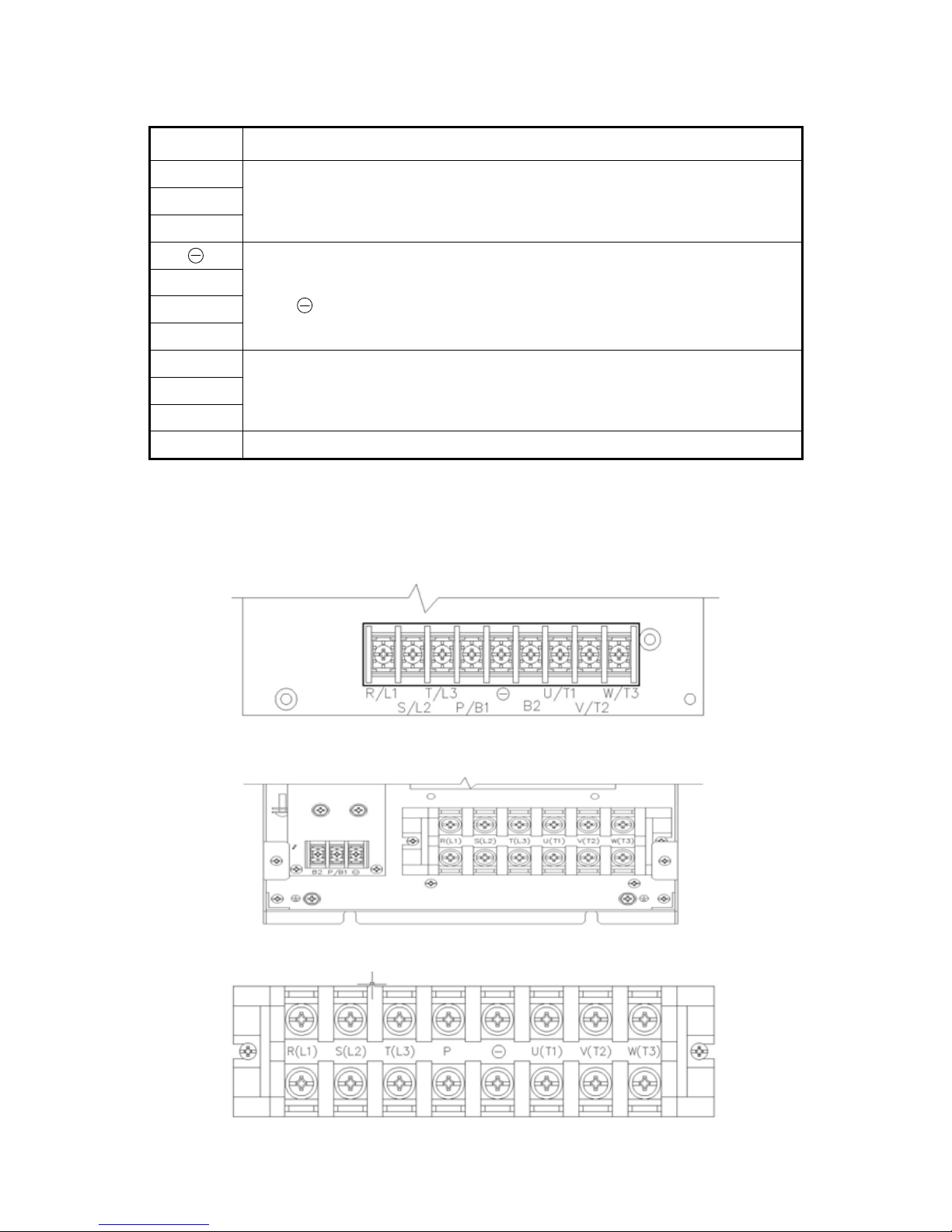
2-2Description of Terminal Function
Table 1 Main circuit terminals
Terminal
Terminal Function
R/L1
S/L2
T/L3
Main circuit input power supply
(For single phase power supply, please use R/L1, S/L2 as input terminal)
B1/P
B2/R
B2
B1/P, B2: External braking resistor
B1/P,
: DC power supply input
U/T1
V/T2
W/T3
Inverter output
E
Grounding lead (3rd type grounding)
Main circuit terminal block configuration
. 220V/440V 10HP below
. 220V/440V 15HP~20HP
. 220V/440V 25HP~60HP
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
11
Table 2 Control circuit terminals
Terminals Functions
1 Forward Operation – Stop Signal
2 Reverse Operation – Stop Signal
3 External Fault Input
4 Fault Reset
5
6
7
8
Multifunction Input Terminal: 3 –Wire Operation, Local/Remote Control,
Multi-Speed Select, FWD/Rev ACC/DEC Choice, ACC/DEC Halting, Base
Block, Overheat Warn, PID Control, DC Braking, Speed Search, Up/Down
Function, External Fault, Timer function, Multifunction Analog Input Setting.
24VG
Digital Signal Ground
Sink Common Point (Locate the short jumper of JP1 in 1-2 position) (NPN)
24V
Digital Signal Ground
Sink Common Point (Locate the short jumper of JP1 in 2-3 position)
E Connection to Shield Signal Lead
+12V Power Supply for External Device
VIN Master speed Voltage Reference (0-10V)
AIN Master speed Current Reference (4-20mA)
AUX
Auxiliary Analog Input:
Auxiliary Frequency Command, Frequency Gain, Frequency Bias,
Overtorque Detection, Output Voltage Bias, ACC/DEC Ramp, DC-Brake
Current, Stall Prevention Current Level during Running Mode, PID Control,
Lower-Bound of Frequency Command, Frequency-Jump-4, etc…
GND Analog Signal Common
AO1
AO2
Analog Multi-Function Output Port:
Frequency Command, Output Frequency, Output Current, Output Voltage,
DC Voltage, PID Controlled Value, Analog Command Input of VIN, AIN or
AUX.
GND Common Lead for Analog Port
R1A Relay Contact R1 Output A
R1B Relay Contact R2 Output B
R1C Relay Contact R1 Common
R2A Relay Contact R2 Output A
R2C Relay Contact R2 Common
DO1 Open-collector transistor's
output
DOG Common terminal of open
collector transistor
Digital Multi-Function Output:
During-Running, Zero-Speed, Agreed-frequency,
Agree-Frequency-Setting, Frequency Output,
Invert-Operation-Ready,
Under-voltage-Detections, Base Block, Frequency
Command, Overtorque Detection, Frequency
Command Invalid, Fault, Undervoltage, Overheat,
Motor overload, Inverter Overload, During-Retry,
Communication-Fault, Timer-Function-Output
S(+)
S(-)
RS-485 Port
Caution
Use the control circuit terminals VIN, AIN according to the setting of Sn-24.
The maximum output current at terminal (+15V or +12V) is 20mA.
The multi-function analog output terminals AO1, AO2 is a dedicated output for a
frequency meter, ammeter, etc. Do not use these 2 analog outputs for feedback
control or for any other control purpose.
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
12
2-3 Wiring between the inverter and peripheral devices and notice
1. Always use ground leads that comply with AWG standards and make sure the
length is as short as possible. (refer Table 3)
2. Always check the output voltage and maximum current of the power source if it
can handle the required power.
3. Never connect AC main circuit power supply to output terminals U/V1, V/T2 and
W/T3.
4. Make sure all the screws properly tightened/fixed together
5. The MCCB (Molded-Case Circuit Breaker) should be installed between the AC
power supply and input terminals R/L1-S/L2-T/L3 on the GHS-V8 inverter.
The user can make his own decision whether or not to install a MC (Magnetic
Contactor) block. When a ground fault interrupter is used, select the one with
no influence for high frequency. Setting current should be 200mA or above and
the operating time at 0.1 second or longer to avoid false triggering.
Grounding.
1. Always use the ground terminal (E) with a ground resistance of less than 100 ohm.
2. Never ground GHS-V8 with other devices such as welding machines, motors, and
other large-current electrical equipment, or ground pole. Run the ground lead in
separate conduit from leads for large-current electrical equipment.
3.Always use ground leads that comply with AWG standards and make sure the length
is as short as possible.
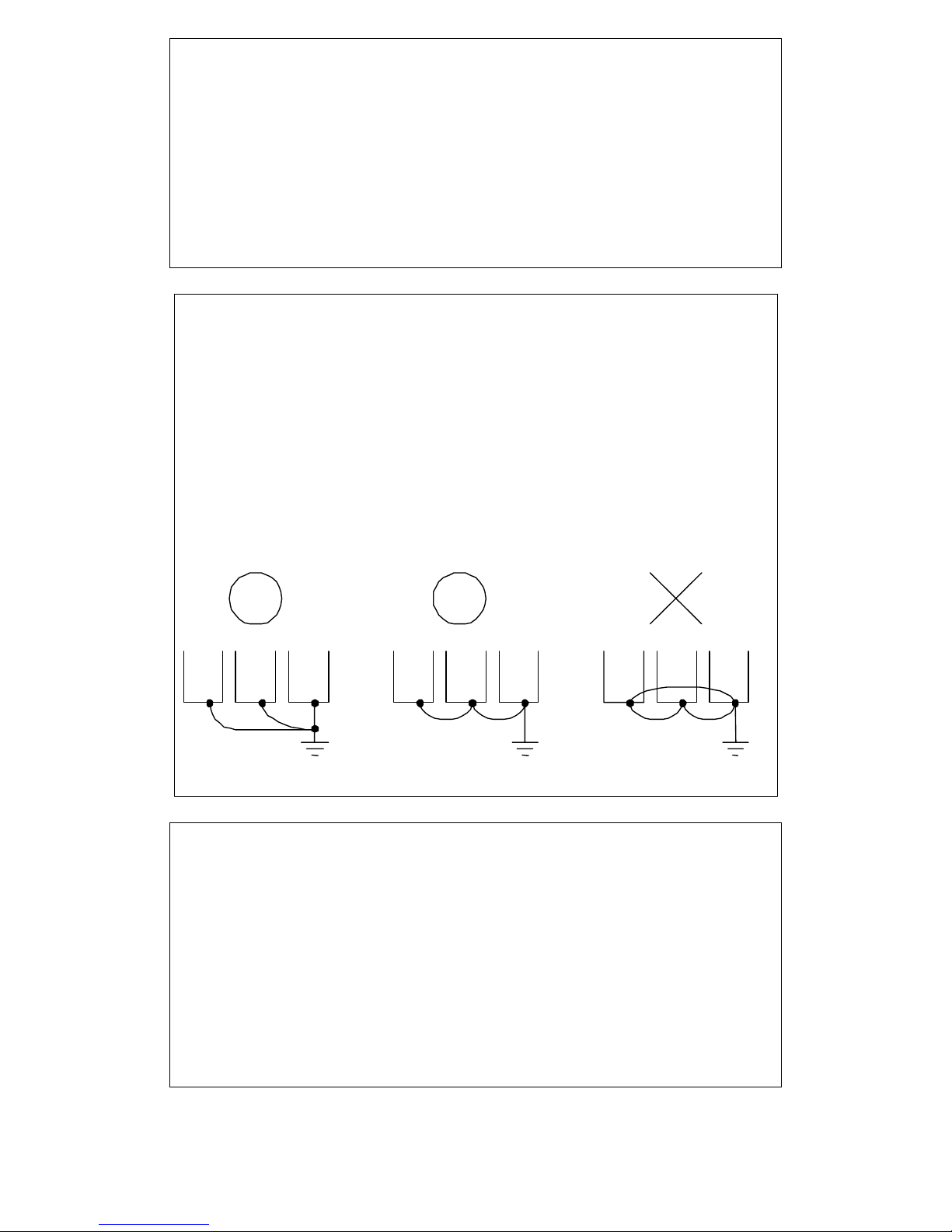
4.When using several GHS-V8 inverters side by side, it is preferable to ground each
unit separately to ground poles. However, connecting all the ground terminals of
GHS-V8 in parallel while only grounding one of the GHS-V8's to the ground pole is
also permissible. Be sure not to form a loop with the ground leads.
(a) Correct
(b) Correct
(c) Not Accept able
Wiring Main Circuit Terminals:
1. Phase rotation of input terminals R/L1, S/L2, T/L3 is available in either
direction. (Clockwise and Counter-Clockwise)
2. Never connect AC main circuit power supply to output terminals U/V1, V/T2 and
W/T3.
3. Connect the output terminals U/T1, V/T2, W/T3 to motor lead wires U/T1, V/T2,
and W/T3, respectively.
4. Check that the motor rotates forward with the forward run source. Switch over any
2 of the output terminals to each other and reconnect if the motor rotates in reverse
with the forward run source.
5. Never connect power factor correction capacitors or input side EMI/RFI filters to
GHS-V8 output.
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
13
Wiring Control Circuit terminals:
1. After turning OFF the main circuit power supply, do not touch or change any
circuit components until the LED “CHARGE" lamp has extinguished. (LED
“Charge" lamp indicates that there is still some charge in the capacitor).
2. Never do wiring work or take apart the connectors in the inverter while the power
is still on.
3. Separate the control circuit leads from the main circuit leads (R/L1, S/L2, T/L3,
U/T1, V/T2, W/T3) and other power cables to prevent erroneous operation caused
by noise interference. When necessary, try to have main-circuit wire and control
circuit wire cross in 90 degree to avoid signal interference.
4. Separate the control circuit terminals leads RA-RB-RC (R1A-R2B-R2C) (contact
output) from leads to terminals ~, A01, A02, GND, DO1, DO2 (R2A-R2C),
DOG and 15V, VIN, AIN, AUX, GND, IP12, IG12, A (+), A (-).
5. Use twisted-pair or shielded twisted-pair cables for control circuits to prevent
operating faults. Process the cable ends as shown in Figure 3. The maximum wiring
distance should not exceed 150 feet.
6. When the digital multi-function output terminals connect serially to an external
relay, an anti-parallel freewheeling diode should be applied at both ends of the
relay.
7. Never apply high voltage test directly to the components within the inverter. (The
semiconductor devices are vulnerable to high voltage shock).
8. The CMOS IC on the control board is vulnerable to Electro-Static Discharge. Do
not try to touch the control board.
9. If Sn-03 is set to 3,5,7 for 2-wire operation or if Sn-03 is set to 4,6,8 for 3-wire
operation, the parameter settings will return to factory default settings. (Except for
parameter settings in Sn-01 and Sn-02, they will remain at their modified settings).
If the inverter is initially operated in 3-wire mode (Sn-03= 4,6,8), the motor will
rotate in CCW direction after setting has been changed to 2-wire mode. (Sn-03=
3,5,7). Be sure that terminals 1 and 2 are OPEN to ensure protection against
personal harm or injury and to prevent any potential damage to machines.
10. If the cable between the inverter and the motor is excessively long, the
high-frequency leakage current will increase causing the inverter output current to
increase as well. This may affect peripheral devices. To prevent this, adjust the
carrier frequency as shown below.
Cable Length
< 100ft. 100-165ft. 166-328ft.
>
329ft.
Carrier Frequency
(Cn-34)
15kHz max
(Cn-34=6)
10kHz max
(Cn-34=4)
5kHz max
(Cn-34=2)
2.5kHz
(Cn-34=1)
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
14
2-4 Wiring Main Circuit and Notice
The user should decide if it is necessary to install the non-fusible-breaker (NFB) and electromagnetic
contactor block (MCB) between the AC source and the R, S, T input terminals. To protect against the
false triggering of leakage-current , the user should install a leakage current breaker with amperage
sensitivity ≧ 200 mA and operation time ≧ 0.1 sec.
Table 3 (a) 220V SERIES
GHS-V8 Model Wire Size(mm2)
Rated Rated current
Applicable
Power
Rating
HP(KW)
[NOTE1]
KVA (A)
Main
Circuit
*2
[NOTE2]
Ground
Wire
E[G]
Control
Wire
*3
[NOTE3]
NFB
[NOTE4]
MCB
[NOTE4]
1(0.75) 2 4.8 2~5.5 2~5.5 0.5~2
TO-50E
(15A)
C-11L
2(1.5) 2.7 6.4 2~5.5 3.5~5.5 0.5~2
TO-50E
(20A)
C-11L
3(2.2)
4 9.6
3.5~5.5 3.5~5.5 0.5~2 TO-50E
(20A)
C-11L
5(3.7) 7.5 17.5 5.5 5.5 0.5~2
TO-50E
(30A)
C-16L
7.5(5.5) 10.1 24 8 5.5~8 0.5~2
TO-100S
(50A)
C-18L
10(7.5) 13.7 32 8 5.5~8 0.5~2
TO-100S
(60A)
C-25L
15(11) 20.6 48 22 8 0.5~2
TO-100S
(100A)
C-50L
20(15) 27.4 64 30 8 0.5~2
TO-100S
(100A)
C-65L
25(18.5) 34 80 30 14 0.5~2
TO-225S
(150A)
C-80G
30(22) 41 96 38 14 0.5~2
TO-225S
(175A)
C-100L
40(30) 54 130 100 22 0.5~2
TO-225E
(175A)
C-125G
(170A)
50(37) 68 160 60*2P 22 0.5~2
TO-225E
(200A)
C-125G
(200A)
60(45) 78 183 60*2P 22 0.5~2
TO-225E
(200A)
C-125G
(235A)
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
15
Table 3 (b) 440V SERIES
GHS-V8 Model Wire Size(mm2)
Rated Rated current
Applicable
Power
Rating
HP(KW)
[NOTE1]
KVA (A)
Main
circuit
[NOTE2]
Ground
connectio
n wire
E[G]
Control wire
*3
[NOTE3]
NFB
[NOTE4]
MCB
[NOTE4]
1(0.75) 2.1 2.6 2~5.5 2~5.5 0.5~2
TO-50E
(15A)
C-11L
2(1.5) 2.7 4.0 2~5.5 3.5~5.5 0.5~2
TO-50E
(15A)
C-11L
3(2.2) 4 4.8 2~5.5 3.5~5.5 0.5~2
TO-50E
(15A)
C-11L
5(3.7) 7.5 8 3.5~5.5 5.5 0.5~2
TO-50E
(15A)
C-18L
7.5(5.5) 10.1 12 3.5~5.5 5.5~8 0.5~2
TO-100S
(20A)
C-18L
10(7.5) 13.7 16 5.5 5.5~8 0.5~2
TO-100S
(30A)
C-25L
15(11) 20.6 24 8~14 8 0.5~2
TO-100S
(50A)
C-25L
20(15) 27.4 32 8~14 8 0.5~2
TO-100S
(60A)
C-35L
25(18.5) 34 40 14 14 0.5~2
TO-225S
(75A)
C-50G
30(22) 41 48 22 14 0.5~2
TO-225S
(100A)
C-50L
40(30) 54 64 22 22 0.5~2
TO-225E
(100A)
C-65G
50(37) 68 80 38 22 0.5~2
TO-225E
(150A)
C-80L
60(45) 82 196 50 22 0.5~2
TO-225E
(175A)
C-100L(17
0A)
(170)
* 1:It is assumed constant torque load。
* 2:The main circuit has terminals of R(L1)、S(L2)、T(L3)、U(T1)、V(T2)、W(T3)、P/B1、
Θ 、B2、
* 3 :The control wire is the wire led to the pin terminals of control board.
* 4 : In Table 3 ,the specified Part No. of NFB and MCB are the item No. of the products of
(Taian). The customer can use the same rating of similar products from other sources. To
decrease the noise interference, be sure to add R-C surge suppressor(0.1uf/1000VDC,10Ω/5W)
at the 2 terminals of coils of electromagnetic contractor.

GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
16
Example of connection between the GHS-V8 and typical peripheral devices are shown as below.
■ Power supply switch (NFB) and earth leakage breaker
‧ Refer to Table3, choose the power supply switch of proper current
rating.
‧ Do not use the NFB as the switch that the inverter is used to control
the running or stop of motor.
‧ When the earth leakage breaker installed to protect the leakage
current fault, be sure the earth leakage breaker has the sensitivity
amperage ≧ 200 mA and operation time ≧ 0.1 sec to avoid
false-triggering.
■ Electromagnetic contactor
In normal operation, you don't need an electromagnetic contactor.
However, you need to install an electromagnetic contactor
while in the case of sequence control through the external device or
automatically re-start after power outage.
Do not use the electromagnetic contactor as the switch that control
the operation of running or stop.
■ AC reactor
‧ The AC-Side reactor on the input AC side can be improve the power
factor and suppress the surge current.
■ Input noise filter
‧ GHS-V8 will comply with the EN55011 Class A regulation if an
input noise filter is used。
‧ Please consult with the selection guide on Appendix "Noise filter
at power supply side"
■ Inverter
‧ Input power supply can be connected to any terminals or terminals
block.
‧ Please connect the ground terminal
to the site ground securely.
■ Output noise filter
‧ Install the noise filter to eliminate noise transmitted through the power
line and the inverter so that the electromagnetic conductive noise and
inductive noise can be reduced to an acceptable level.
‧ Please consult with the selection guide on Appendix“zero-phase
noise filter"
‧
■ Induction Motor
‧ If one inverter is drive more than one motor, the inverter's rated
current should be much greater than the sum of total current of
motors while in operation.
‧ The inverter and the motor should connect to the ground separatedly.
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
17
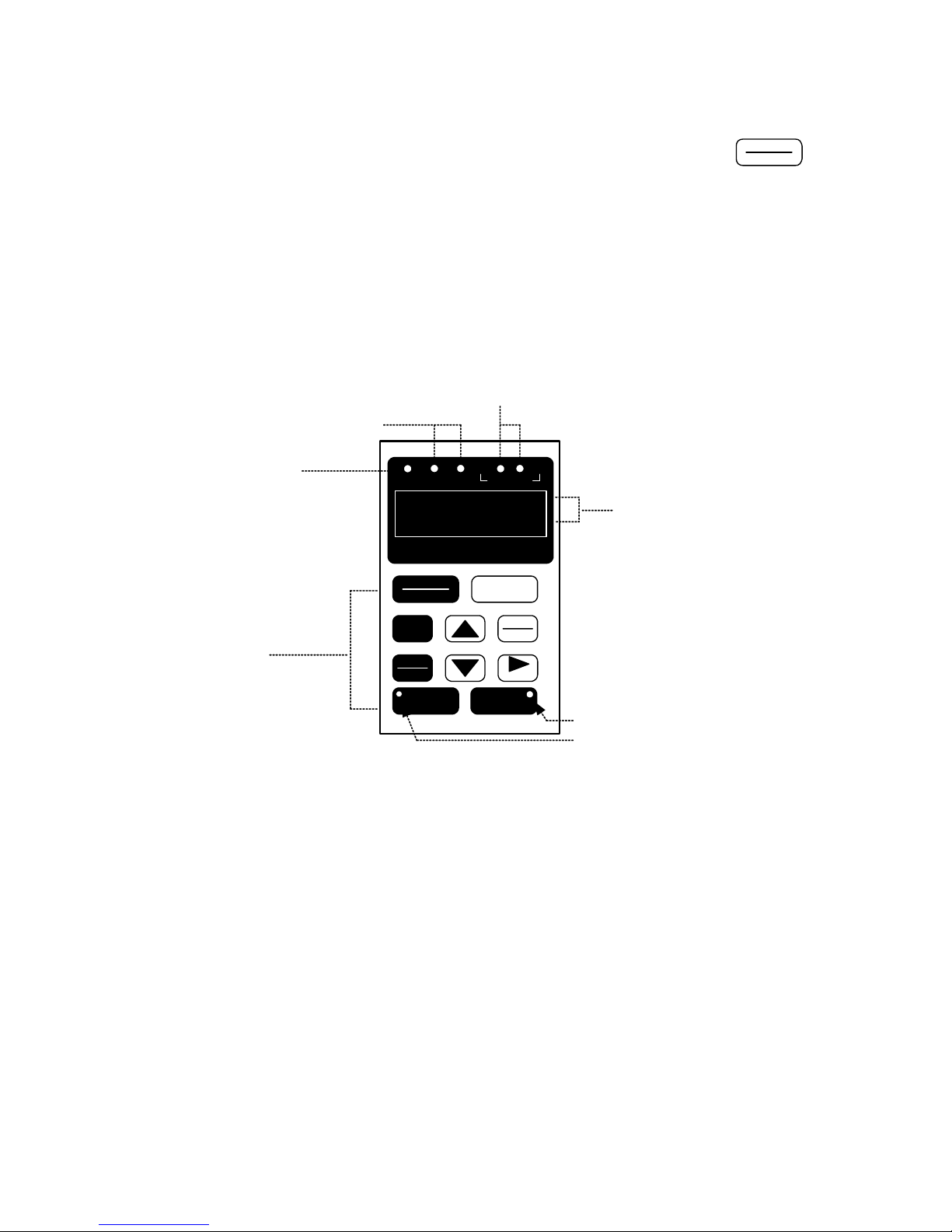
3. Using the LED Digital Operator
3.1 Functions of LED Digital Operator
The digital Operator has 2 modes: DRIVE mode and PRGM mode. When the
inverter is stopped, DRIVE mode or PRGM mode can be selected by pressing the key
PRGM
DRIVE
. In
DRIVE mode, the operation is enabled. In PRGM mode, the parameter settings for operation can be
changed but the operation is not enabled. The component names and functions are shown below:
RUN
PRGM
DRIVE
DSPL
EDIT
ENTER
DRIVE FWD REV REMOTE
SEQ REF
FWD
REV
JOG
SEQ:lit when run command come from control circuit terminal or
RS-485 port is enabled
REF:lit when frequency reference come from control circuit terminal
or RS-485 port is enabled
LED display
Keypad (function as below)
RESET
F60.00
DRIVE:lit when in DRIVE
mode
FWD: lit when a forward run
command is input
REV: lit when a reverse run
command is input
Indicator of
operation
STOP
DIGITAL OPERATOR
TMCA-V8LED
Figure LED Digital Operator
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
18
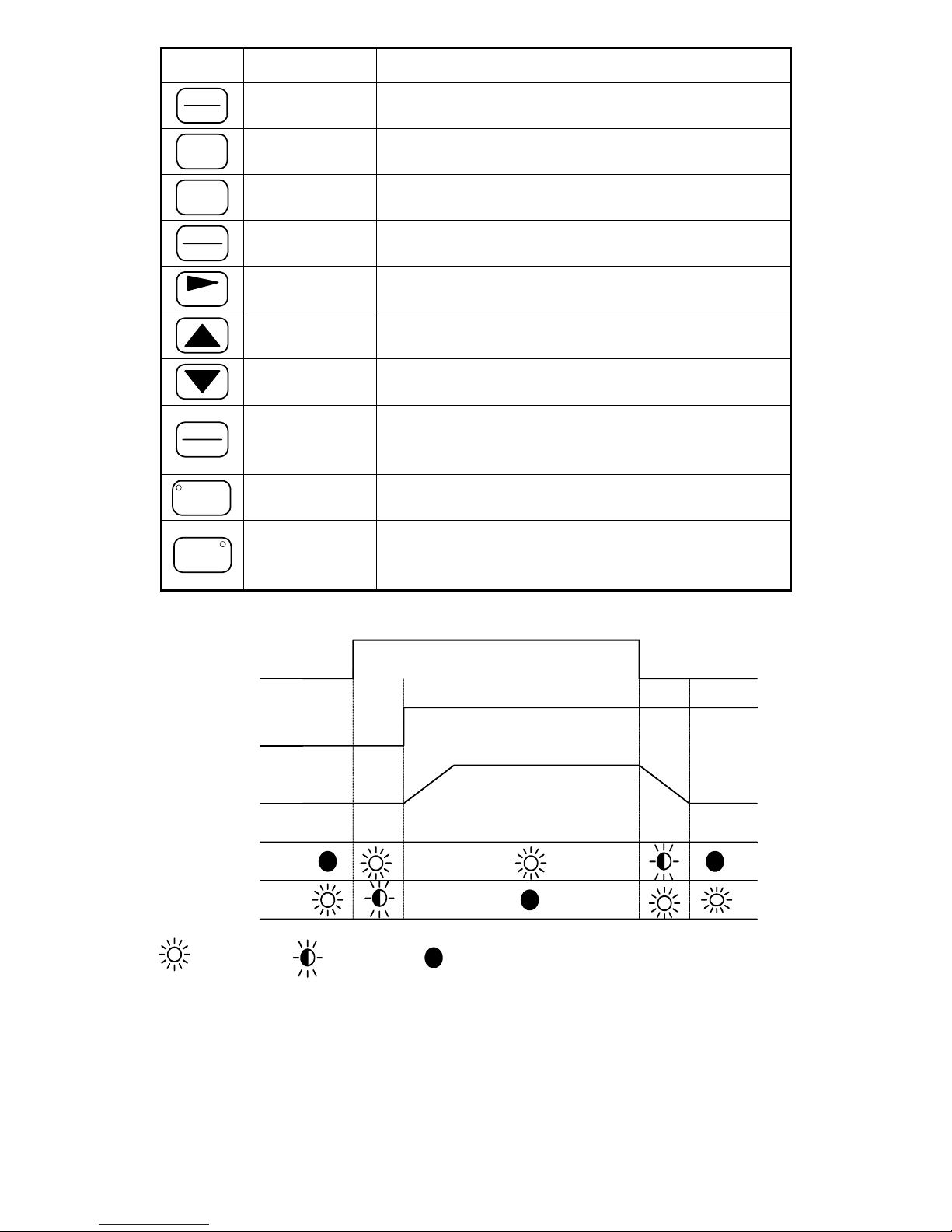
Key' function Table 4
Key Name Function
PRGM
DRIVE
PRGM/DRIVE
Key
Switch between operation (PRGM) and operation (DRIVE)
DSPL
DSPL Key Display operation status
JOG
JOG Key
Enable jog operation from LED digital operator in operation
(DRIVE)
FWD
REV
FWD/REV Key Select the rotation direction from LED digital operator.
RESET
SHIFT/RESET
Key
Set the number of digital for user constant settings. Also It
acts as the `RESET' key when a fault has occurred.
Increment Key
Select the menu items, groups, functions and user constant
name, and increment set values.
Decrement Key
Select the menu items, groups, functions and user constant
name, and decrement set values.
EDIT
ENTER
EDIT/ENTER Key
Select the menu items, groups, functions and user constant
name, and set values (EDIT). After finishing the above
action, press the key.
RUN
RUN Key
Start inverter operation in (Drive) mode when the digital
operator is used. The LED will light.
STOP
STOP Key
Stop inverter operation from LED digital operator. The key
can be enabled or disabled by setting a constant (Sn-07)
when operation from the control circuit terminal
STOP
RUN
Output frequency
Frequency
command
On Off
RUN
STOP STOP
RUN indicator
STOP indicator
Blinking
Frequency
command
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
19
* : RUN,STOP indicators lights or blinks to indicate the 3 operating status
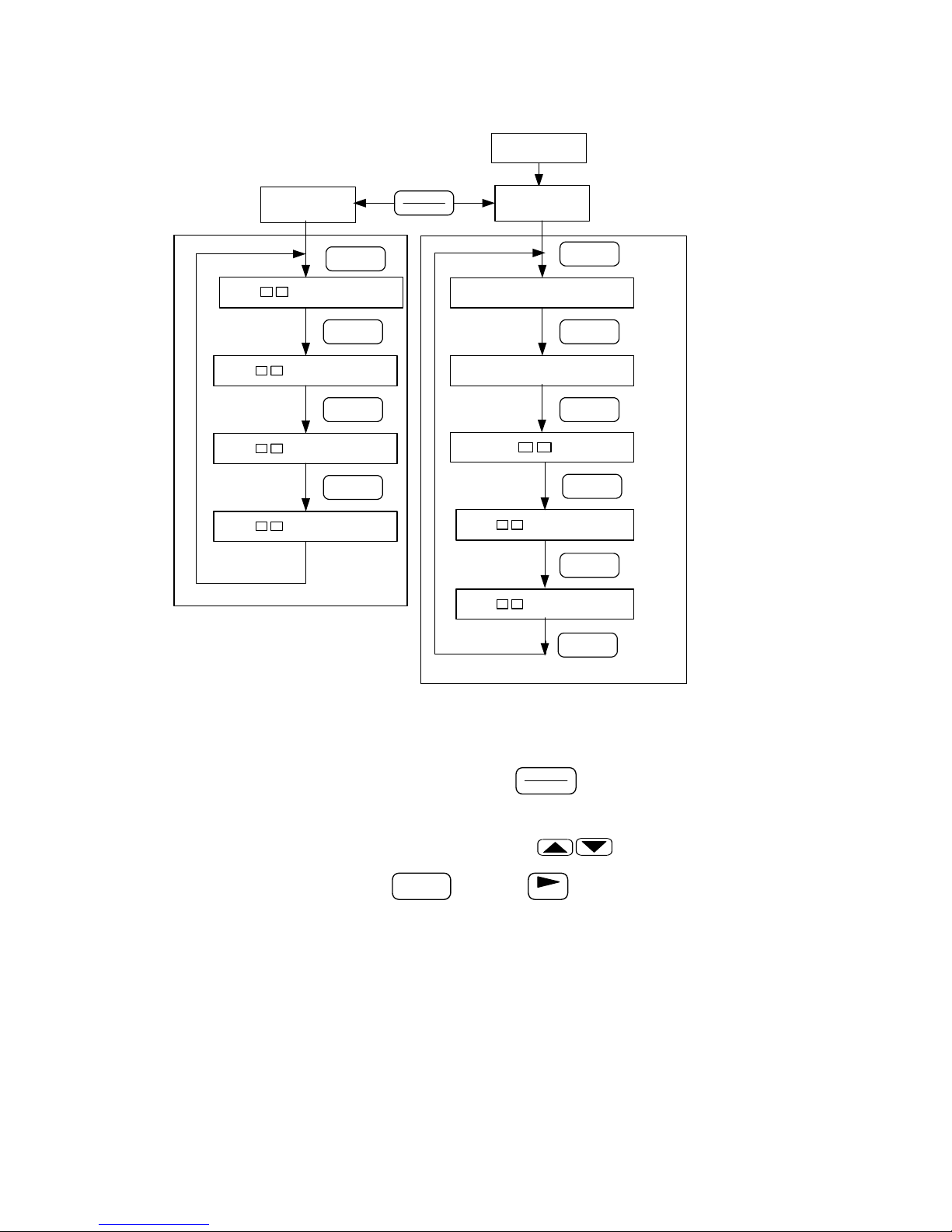
■ DRIVE mode and PRGM mode displayed contents
PRGM
DRIVE
Power-on
DRIVE mode
PRGM mode
DSPL
Frequency reference
value displayed
DSPL
Display monitor/set items
DSPL
DSPL
bn- Monitor∕set
Un- Monitor
DSPL
An- monitored∕set
DSPL
bn- monitored∕set
DSPL
Sn- monitored∕set
DSPL
Cn- monitored∕set
*2
*1
DSPL
Switch be valid only when inverter stopped
An- Monitor∕set
DSPL
*3
*1:When the inverter is put into operation , the inverter system immediately enters into DRIVE mode.
The default displayed items can be set by bn-38. Press the
PRGM
DRIVE
key, the system will switch into
PRGM mode.
*2:The monitored items to be displayed can be selected by key .
*3:When in DRIVE mode, press the
DSPL
key and
RESET
key to monitor the setting values of
Sn- and Cn- .

GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
20
■ Parameter description
All parameters can be grouped as followings.
Parameter
Description
An-□□
Frequency command
bn-□□
Parameter settings can be changed
during running
Sn-□□
System parameter settings
Cn-□□
Control parameter settings
The parameter setting of Sn-03 (operation status) will determine if the setting value of different
parameter groups are allowed to be changed or only to be monitored as shown below。
DRIVE mode PRGM mode
Sn-03
To be set
To be
monitored
To be set
To be
monitored
0 An,bn Sn,Cn An,bn,Sn,Cn
1 An bn, Sn,Cn An bn,Sn,Cn
When in DRIVE mode, the parameter group Sn-, Cn- can only be monitored if the
RESET
key and
DSPL
key are to be pressed at the same time. After a few trial operation and adjustment, the setting
value Sn-03 is set to be “1" so as not to be modified again..
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
21
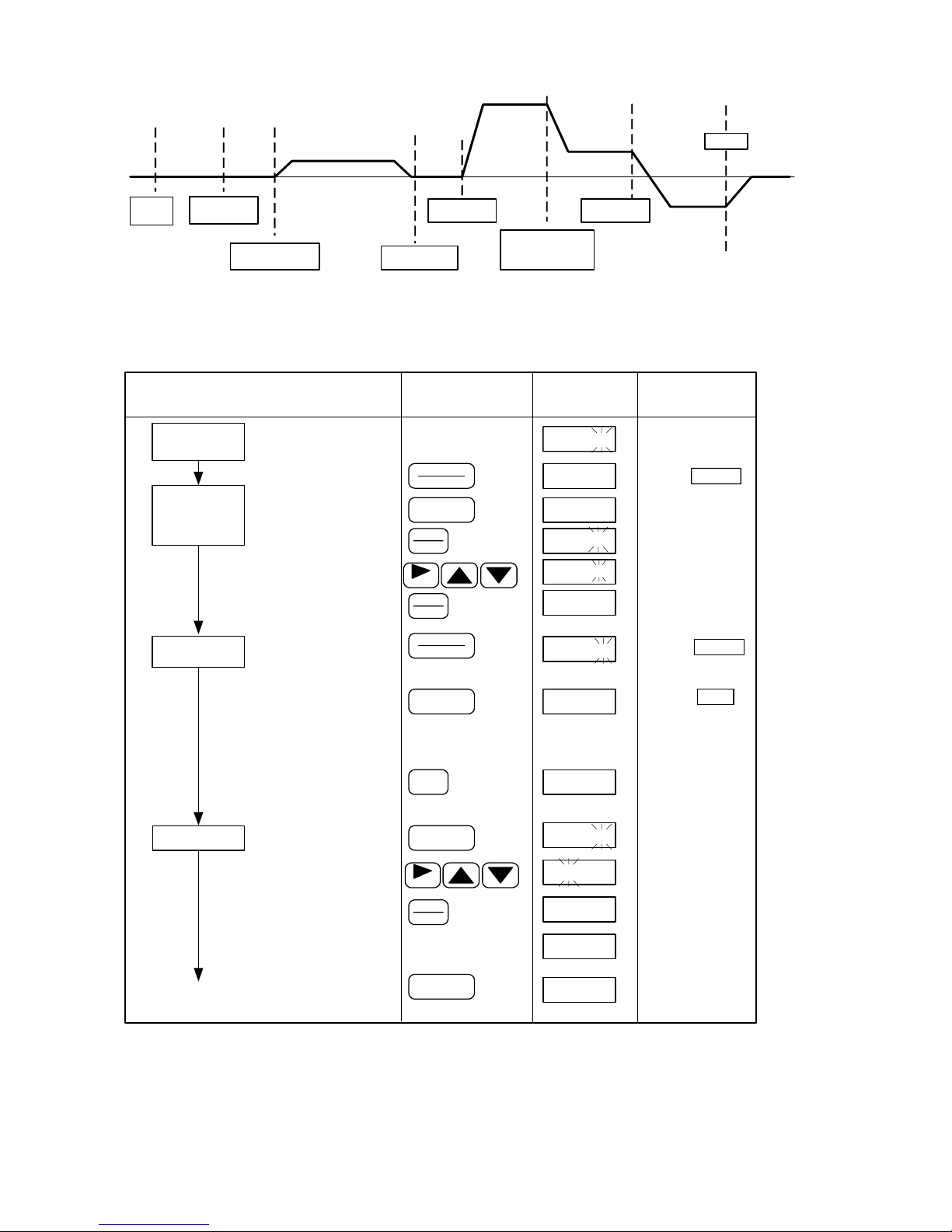
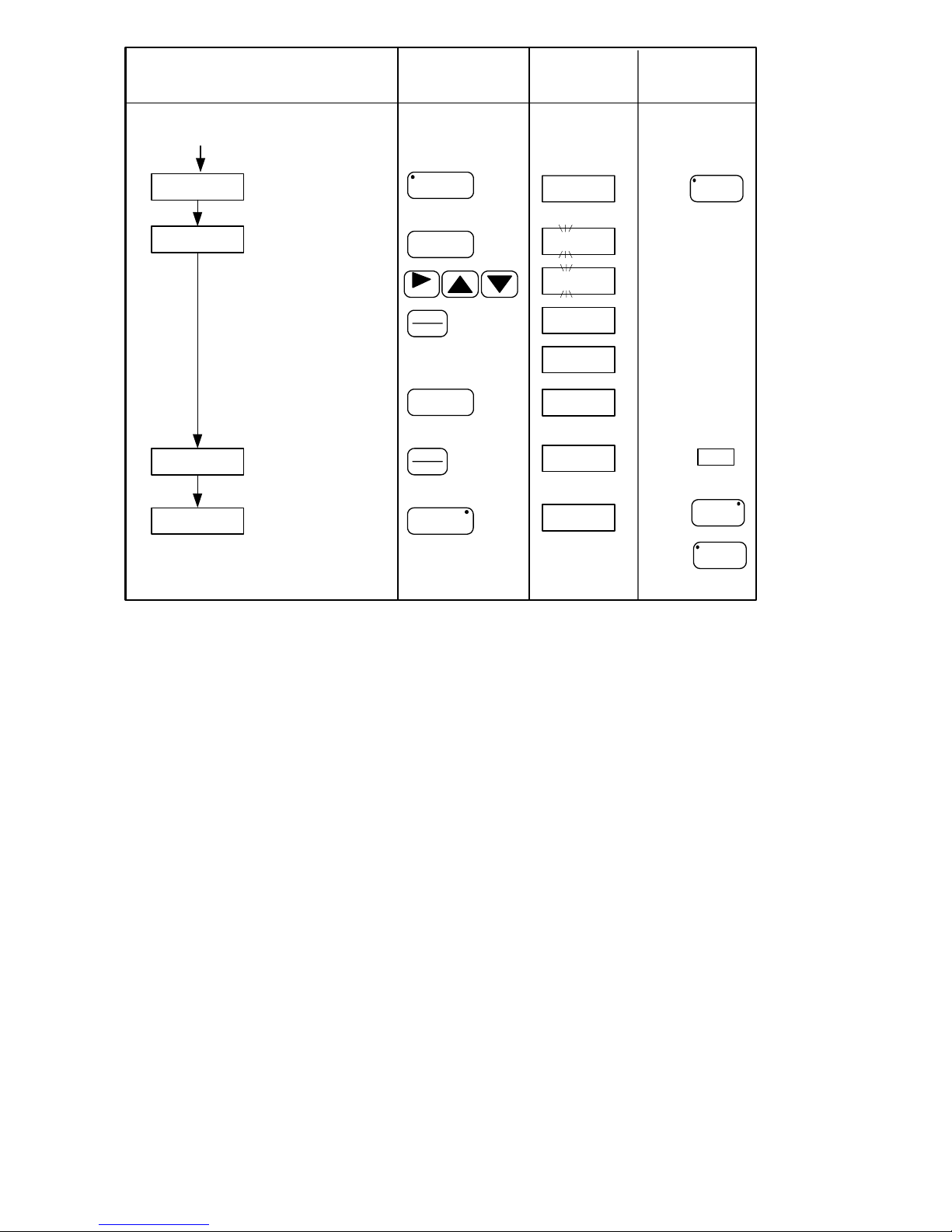
■ Sample example of using digital operator
This sample example will explain the operating of digital operator according to the following time chart.
(1)
power
on
(2)
Set input
voltage
(3)
Forward jog
operation
(4)
Frequency
setting
(5)
Forward
run
(6)
Frequency
reference value
changed
(7)
Reverse
run
(8)
stop
Forward
60.00 Hz
reverse
30.00 Hz
forward
jog frequency
=6.00 Hz
forward
30.00 Hz
■ Sample operation
PRGM
DRIVE
Description Key sequence
LED digital
operator display
Remark
F00.00
DSPL
.Select drive mode
.Select output frequency
displayed
.Select direction of rotation
(when power-on, initially
defaulted FWD)
.Jog operation
.Select frequency command
displayed
.Change frequency command
.Set new frequency setting
.Select frequency command
displayed
(3)
Fwd. jog
JOG
EDIT
ENTER
DSPL
按六次
RESET
0.00
6.00
LED on
DRIVE
LED on
FWD
(4)
Frequency setting
= 60.00Hz
End
DSPL
Displayed for 5 sec
Confirm displayed
F00.00
F60.00
F60.00
0.00
Continue
PRGM
DRIVE
An -01
Cn -01
440.0
380.0
End
LED on
Displayed for 5秒
confirmed displayed
DRIVE
DSPL
Press 3
times
EDIT
ENTER
EDIT
ENTER
(1)
(2)
When power on
Input voltage
setting
(e.g., AC input
voltage 380V)
RESET
F00.00
GWAN HSIAN ELECTRIC&MACHINERY CO.,LTD
22
Description Key sequence
LED digital
operator display
Remark
continue
.Running operation
.Select frequency command
displayed
.Select O/P frequency displayed
.Switch to reverse
.Decrease to stop
RUN
EDIT
ENTER
DSPL
(6)
Freq. command
changed= 30 Hz
LED on
RUN
(5) Fwd run
DSPL
FWD
REV
STOP
(7)
Reverse run
(8)
Stop
LED on
REV
LED on
STOP
(blinking
while Decel.)
RUN
Displayed for 5 sec
confirm the display
RESET
60.00
F60.00
F30.00
End
F30.00
30.00
- 30.00
0.00
GWAN HSIAN ELECTRIC&MACHINERY CO., LTD
23
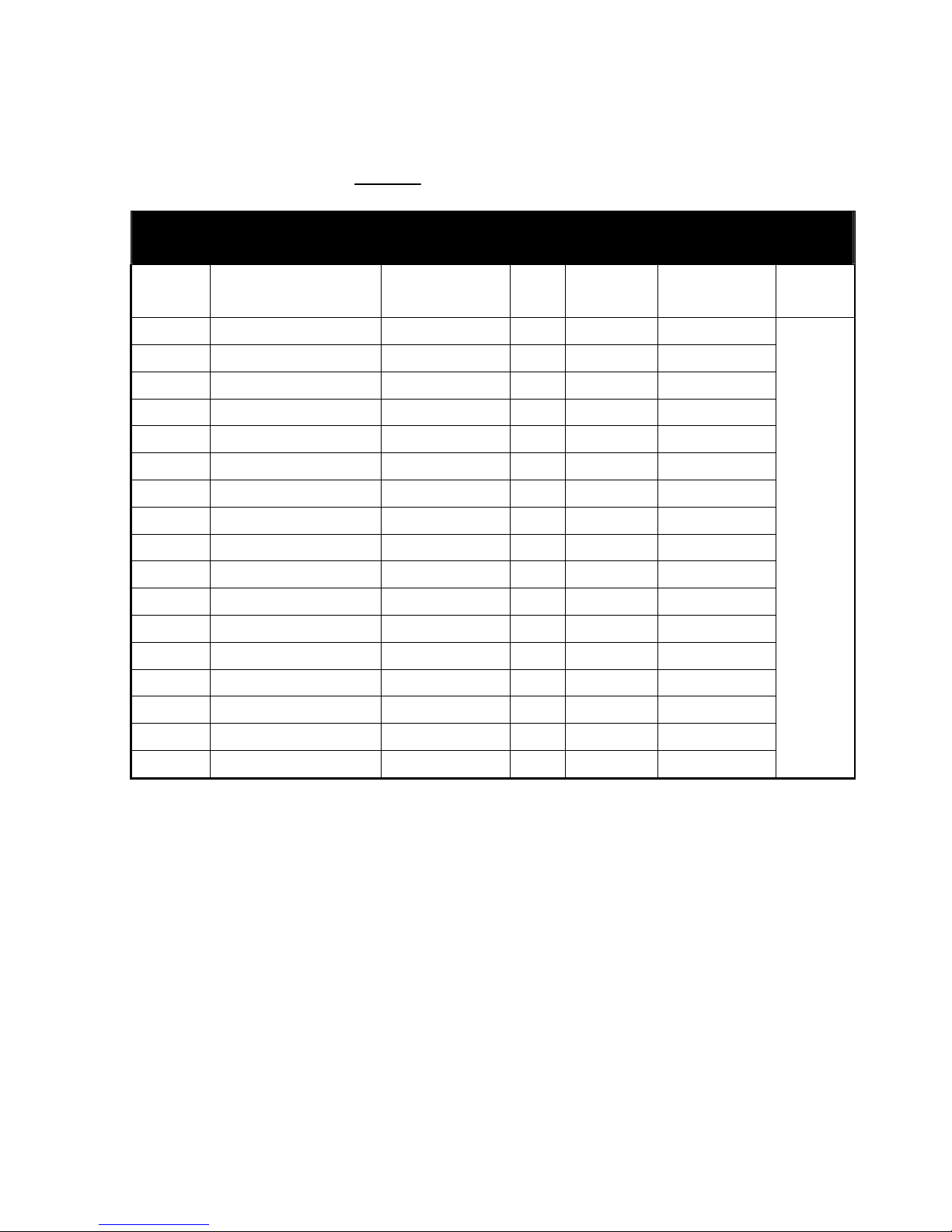
4. Parameter settings
4-1 Frequency command An-□□
An - ( in multi-speed operation ) ¶ Under the DRIVE mode, the user can set the values.
Parameter
No.
Name Setting Range
Setting
Unit*1
Factory
Setting
User Setting Ref. Page
An-01 Frequency Command 1
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-02 Frequency Command 2
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-03 Frequency Command 3
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-04 Frequency Command 4
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-05 Frequency Command 5
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-06 Frequency Command 6
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-07 Frequency Command 7
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-08 Frequency Command 8
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-09 Frequency Command 9
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-10 Frequency Command 10
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-11 Frequency Command 11
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-12 Frequency Command 12
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-13 Frequency Command 13
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-14 Frequency Command 14
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-15 Frequency Command 15
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-16 Frequency Command 16
0.00~400.00 Hz
0.01Hz 0.00 Hz
An-17 Jog Frequency Command
0.00~400.00 Hz
0.01Hz 6.00 Hz
52,
69,
70,
*1.The displayed “Setting Unit” can be changed through the parameter Cn-28. At factory setting,
the value of “Setting Unit” is 0.01 Hz.
* The setting of An-01~An16 can be used with frequency command for Multi-step operation or for
16-stepAuto-Run Mode operation.
GWAN HSIAN ELECTRIC&MACHINERY CO., LTD
24
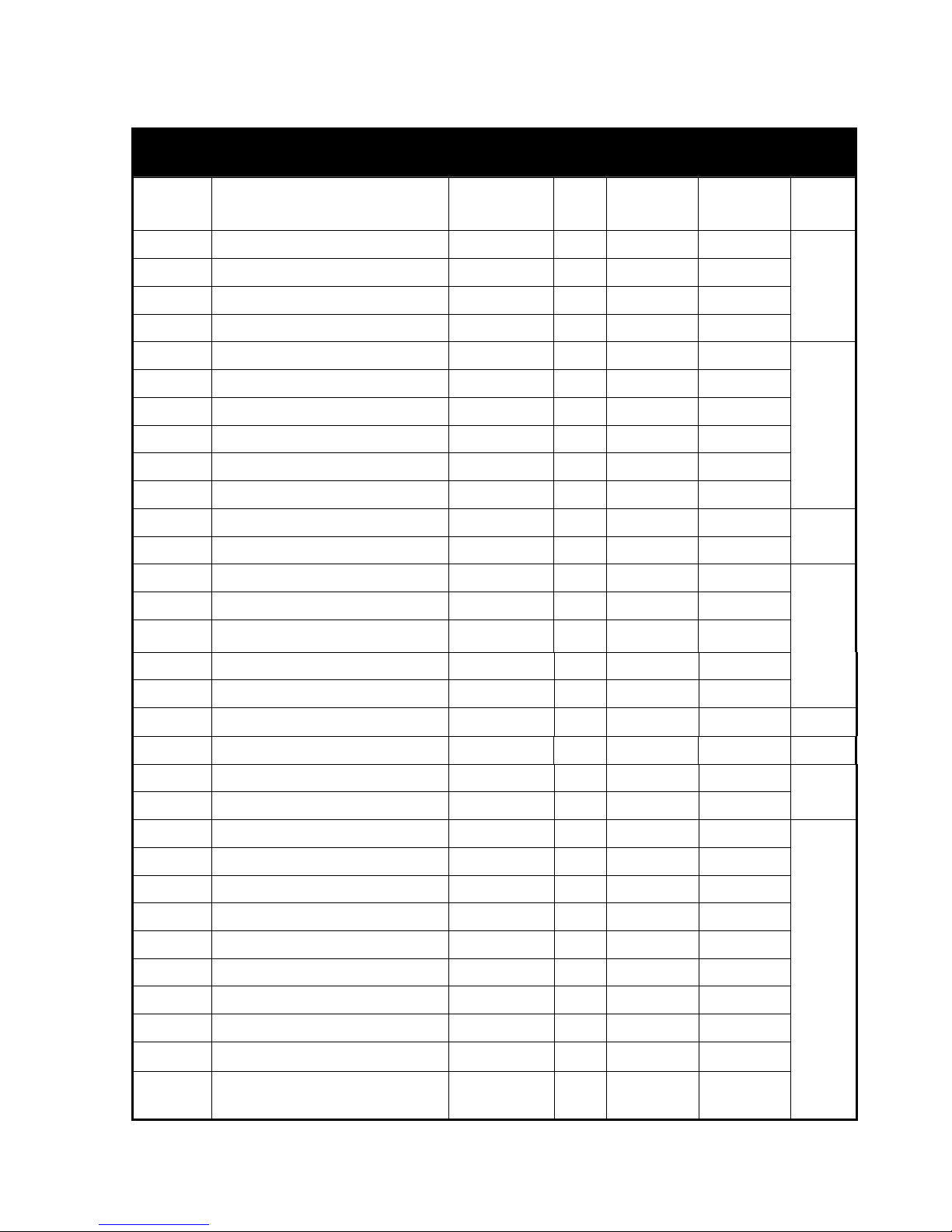
4-2 Parameters Can Be Changed during Running Bn-□□
bn - Parameters can be changed during Running
Parameter
No.
Name Setting Range
Setting
Unit*1
Factory
Setting
User Setting
Ref.
Page
bn-01 Acceleration Time 1 0.0~6000.0s 0.1s 10.0s
bn-02 Deceleration Time 1 0.0~6000.0s 0.1s 10.0s
bn-03 Acceleration Time 2 0.0~6000.0s 0.1s 10.0s
bn-04 Deceleration Time 2 0.0~6000.0s 0.1s 10.0s
25
bn-05 Analog Frequency Cmd. VIN Gain 0.0~1000.0% 0.1% 100.0%
bn-06 Analog Frequency Cmd. VIN Bias -100.0~100.0% 0.1% 0.0%
bn-07 Analog Frequency Cmd. AIN Gain 0.0~1000.0% 0.1% 100.0%
bn-08 Analog Frequency Cmd. AIN Bias -100.0~100.0% 0.1% 0.0%
bn-09 Multi-function Analo
g
Input AUX Gain 0.0~1000.0% 0.1% 100.0%
bn-10 Multi-function Analog Input AUX Bias -100.0~100.0% 0.1% 0.0%
26
bn-11 Multi-function Analo
g
Output AO1 Gain 0.01~2.55 0.01 1.00
bn-12 Multi-function Analo
g
Output AO2 Gain 0.01~2.55 0.01 1.00
27
bn-13 PID Detection Gain 0.01~10.00 0.01 1.00
bn-14 PID Proportional Gain (P) 0.01~10.00 0.01 1.00
bn-15 PID Integral Time (I) 0.00~100.00s 0.01s 1.00s
27
28
bn-16 PID Differential Time (D) 0.00~1.00s 0.01s 0.00s
bn-17 PID Bias 0~109% 1% 0%
bn-18 Energy Saving Gain 50~150% 1% 100% 29
bn-19 Auto Torque Boost Gain 0.0~2.0 0.1 1.0 29
bn-20 Time Function ON_Delay Time 0.0~6000.0s 0.1s 0.0s
bn-21 Time Function OFF_Delay Time 0.0~6000.0s 0.1s 0.0s
30,62
bn-22 1st _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-23 2nd _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-24 3rd _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-25 4th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-26 5th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-27 6th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-28 7th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-29 8th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-30 9th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-31 10th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
30,68
69,70
GWAN HSIAN ELECTRIC&MACHINERY CO., LTD
25
bn - Parameters can be changed during Running
bn-32 11th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-33 12th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-34 13th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-35 14th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-36 15th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
bn-37 16th _Step Time Under Auto_Run Mode 0.0~6000.0s 0.1s 0.0s
30,68,
69,70
bn-38 Monitor 00~18 - 00 30
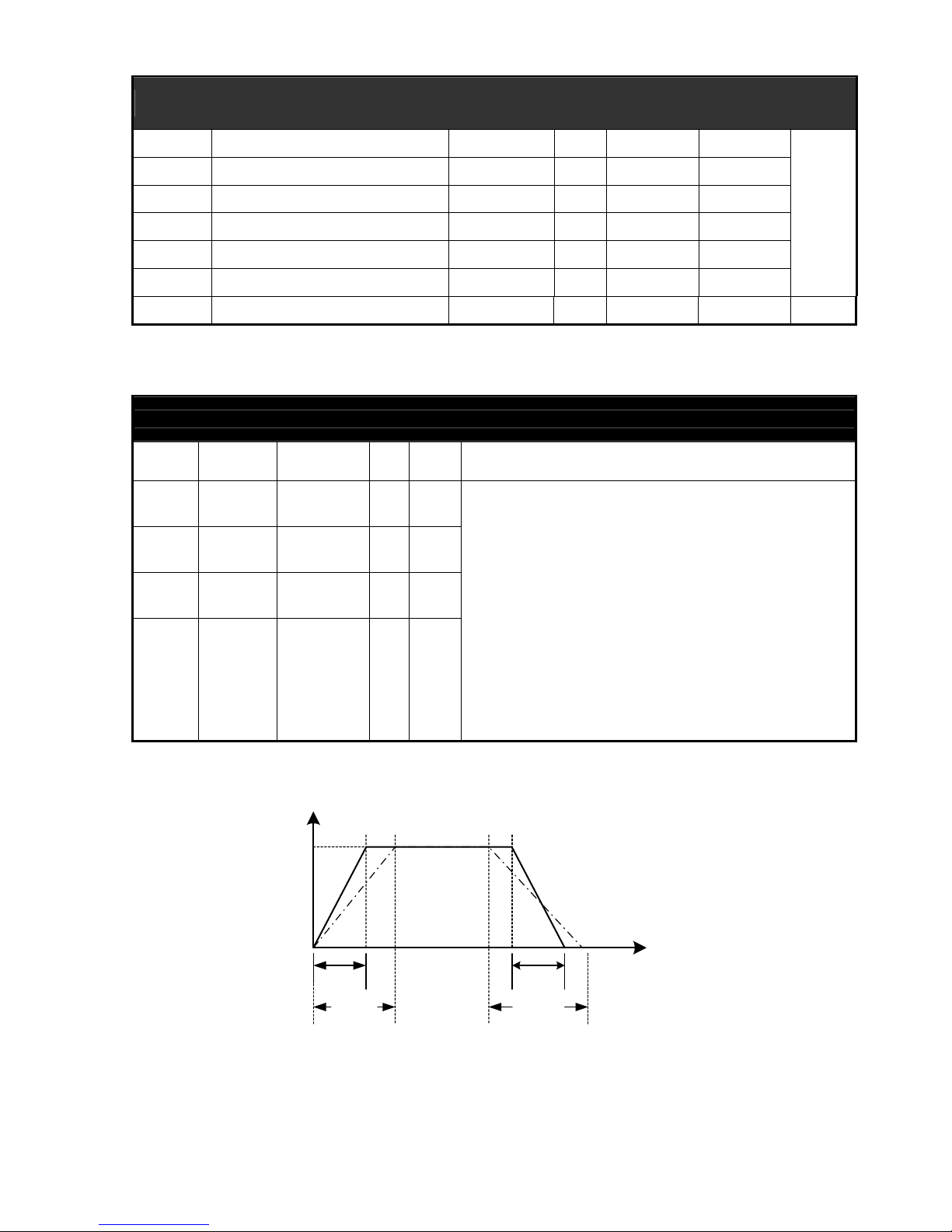
bn - Parameter Function
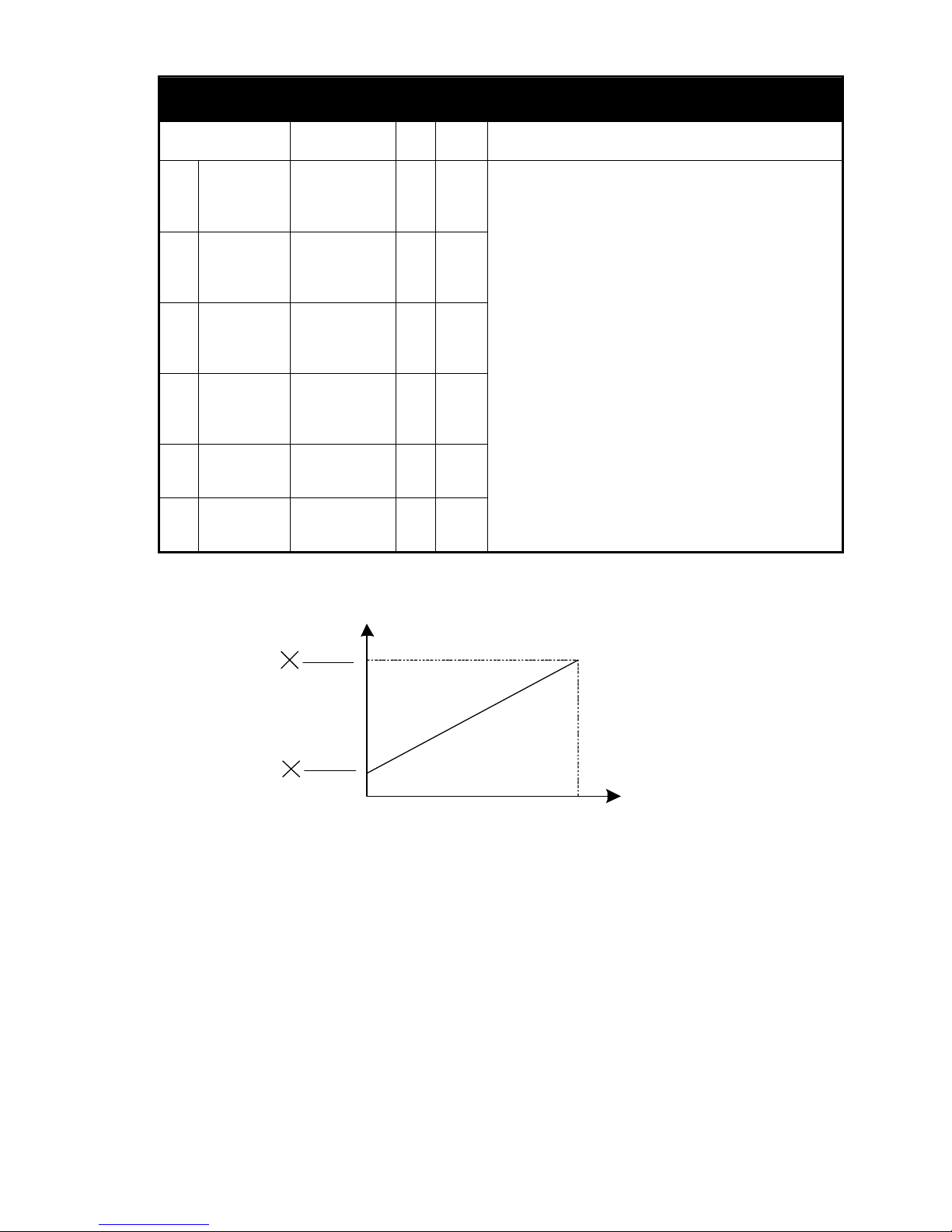
bn-01~bn-04:Accel. / Decel. Time
Parameter
No.
Name Setting Range Unit
Factory
Setting
Function
bn-01
Acceleration
Time 1
0.0~6000.0s 0.1s 10.0s
bn-02
Deceleration
Time 1
0.0~6000.0s 0.1s 10.0s
bn-03
Acceleration
Time 2
0.0~6000.0s 0.1s 10.0s
bn-04
Deceleration
Time 2
0.0~6000.0s 0.1s 10.0s
1. Acceleration time: the time required to go from 0% to 100% of the
maximum output frequency.
Deceleration time: the time required to go from 100 % to 0% of the
maximum output frequency.
2. The acceleration and deceleration can be grouped as 2 sectors. The
acceleration and deceleration of each sector can be set individually.
The 2 sectors can be switched via the multi-function input terminal
~.
3. Under some circumstances, the motor will vibrate in the
beginning-accel. , beginning-decel. , ending-accel. or ending-decel. .
Vibration can be reduced by these 4 different setting of the S-curve.
Their settings are determined by the parameters of Cn-41~Cn-44. To
extend their time (make larger values setting), you should refer Fig 4
for more details.
Max. output
frequency
(Cn-02)
output
frequency
bn-02
bn-04
Time
bn-03
bn-01
Fig 4 Acceleration time 1 and Deceleration time 2
GWAN HSIAN ELECTRIC&MACHINERY CO., LTD
26
bn-05~bn-10:Analog output setting
Parameter No. &
Name
Setting Range Unit
Factory
Setting
Function
bn-05
Analog
frequency
command VIN
Gain
0.0~1000.0% 0.1% 100.0%
bn-06
Analog
frequency
command VIN
Bias
-100.0~100.0% 0.1% 0.0%
bn-07
Analog
frequency
command AIN
Gain
0.0~1000.0% 0.1% 100.0%
bn-08
Analog
frequency
command AIN
Bias
-100.0~100.0% 0.1% 0.0%
bn-09
Multi-function
Analog Input
AUX Gain
0.0~1000.0% 0.1% 100.0%
bn-10
Multi-function
Analog Input
AUX Bias
-100.0~100.0% 0.1% 0.0%
Analog voltage frequency command VIN gain:Input voltage
range:0~10V,
Analog current frequency command AIN gain:Input current
range:4~20mA,
Multi-function analog input AUX gain:Input voltage range:0
~10V,
Analog voltage frequency command VIN bias:Input voltage
range:0~10V,
Analog current frequency command AIN bias:Input current
range:4~20mA,
Multi-function analog input AUX bias:Input voltage range:0
~10V,
For every different Analog Frequency Command (Voltage or
Current) and Multi-Function Analog Inputs, their
corresponding Gain and Bias are related as Fig 5.
Command Value
Input Voltage
(Input C urrent)
* ( ) If current
command is used
0V
(4mA)
10V
(20mA)
Max. Output
Frequency
100
Bias
Max. Output
Frequency
100
Gain
Fig .5 Analog input gain and bias
GWAN HSIAN ELECTRIC&MACHINERY CO., LTD
27
bn-11 & bn-12:Multi-Function Analog Output Gain
Parameter No. &
Name
Setting Range Unit
Factory
Setting
Function
b-11
Multi-function
Analog Output
AO1 Gain
0.01~2.55 0.01 1.00
bn-12
Multi-function
Analog Output
AO2 Gain
0.01~2.55 0.01 1.00
1. Multi-Function Analog Output AO1 and AO2 can be set
upon Sn-33 & Sn-34 for their individual voltage level
respectively. Their output range is 0~10V.
2. When the bn-11 & bn-12=1.00 and AO1& AO2 has output
10V, refer the “Multi-Function Analog output” for their
detailed usage.
3. Users can set the gain respectively to modify the voltage.
The resolution of max output is 10V/256.
Multi-Function Analog Outpu t AO2
(output contents depend on Sn-35)
10.0V/100% * Bn-12
Terminal
AO2
Multi-Function Analog Output AO1
(output contents depend on Sn-34)
10.0V/100% * Bn-11
Terminal
AO1
Fig 6 Multi-function Analog Output Gain
bn-13~bn-17:PID parameter setting
Parameter No. &
Name
Setting Range Unit
Factory
Setting
Function
bn-13
PID detection
gain
0.01~10.00 0.01 1.00
bn-14
PID proportional
gain (P)
0.01~10.00 0.01 1.00
bn-15
PID integral time
(I)
0.00~100.00s 0.01s 1.00s
bn-16
PID differential
time(D)
0.00~1.00s 0.01s 0.00s
bn-17 PID Bias
0~109% 1% 0%
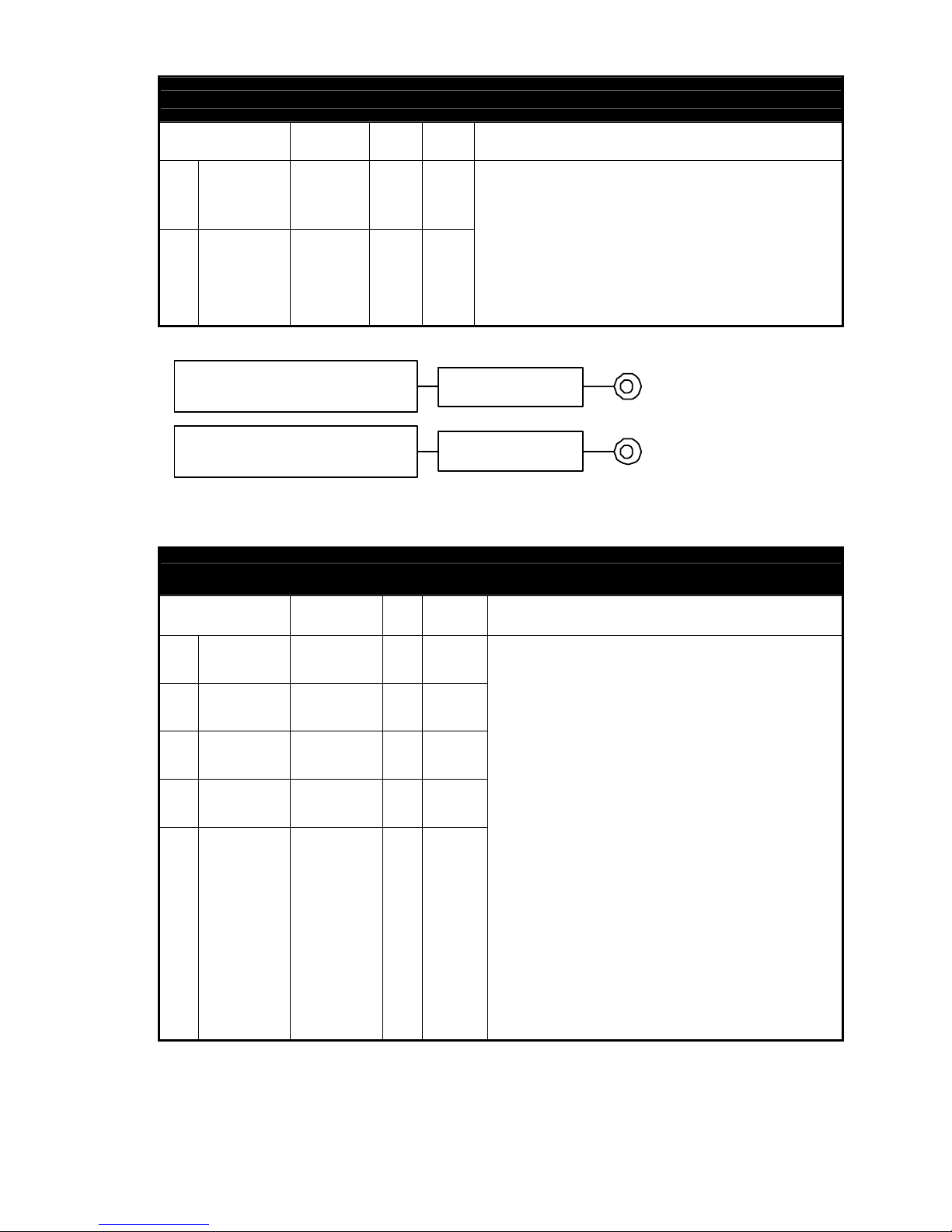
1. The PID Control Function is a control system that matches
the feedback value (i.e., a detected value) to the target value.
Combining the Proportional (P), Integral (I) and Derivative
(D) control enable the PID controller to achieve required
response through the tuning procedure of PID Proportional
Gain Bn-14, PID Integral Time Bn-15 and PID Derivative
Time Bn-16.
2. Please refer to Fig 7 of “Block diagram of PID Control”.
3. To enable PID, set Sn-41=1. The detected value is obtained
through the input terminals of master speed terminals (VIN
& AIN). Its source of target value (frequency command)
can be determined/selected from 1) operator 2) RS-485 3)
AUX control terminal under the setting of Sn-05.(refer
Sn-05). Note that if the target value is from the AUX
multi-function analog terminal, the setting of Sn-29 is set as
Sn-29=11.
4. Please refer to Fig 8 ‘Response of PID control for
STEP-shape (deviation) input’ for the meaning of the
Bn-13, Bn-14, Bn-15 and Bn-16and how they work in PID
control.。
5. If both the target value and feedback value are set to 0,
make the inverter output frequency to zero by tuning the
PID offset Bias Bn-17.

GWAN HSIAN ELECTRIC&MACHINERY CO., LTD
28
Bn-16
deriv ativ e
time
PID output -1
(Un-17)
Cn-45
primary delay
PID
(Un-16)
PID output -2
(Un-18)
Frequency
comm and
M u lti-fun c tio n a n alo g inp u t ter m in a l A UX
(when Sn-29 = 11)
master frequency command input terminal
(VIN= 0 ~ 10 V or AIN= 4 ~ 20 m A )
Tar get
value
detected
value
P
I
D
100%
-100%
Max of
output
frequency
Bn- 17
Bia s
Bn- 14
proport ional
gain
Bn-15
integ ral time
Cn-44
integ ral max
Bn- 13
detected
gain
Fig 7 Block diagram for PID Control in inverter (set Sn-41 to HIGH( =1) to enable PIDcontrol)
Target Value - (Detected Value × bn-13)
Deviation
P
I
D
Deviation
bn-15
5msec
Time
Deviation ×bn-14
Cn-44
(Deviation after 5ms)* (bn-16 / 5ms)
Time
Time
Time
Fig 8 Response of PID control for STEP-shape (deviation) input
Deviation = Target Value - Detected Value × Bn-13.
P’s Control Output = Deviation × Bn-14.
I’s Control Output will increase with time and the output will be equal to the deviation after time specified
by parameter Bn-15.
The parameter Cn-44 will prevent the calculated value of the Integral Control (with the Integral Time
Bn-16) in the PID Control from exceeding the fixed amount.
bn-16
D’s control output ‧ =(
5 msec
) ×( 5 msec difference)
Note : To enable PI D Function, parameter Sn-41 must be set to 1.
 Loading...
Loading...